Embed Size (px)
Citation preview
The data contained in this presentation together with all the information and know-how disclosed thereby is the exclusive property of Hydroid, Inc and includes Proprietary and Confidential Information of Hydroid, Inc. This Proprietary information is technical information of confidential or trade secret nature and is protected by the trade secrets Act 18 USC 1905 and is exempt from disclosure requirements of FOIA 5 USC 5652(b) (3) and (4). The reproduction, use, release, or disclosure of such Proprietary Information, either in whole or in part, or the manufacture, sale or use of the matter disclosed herein whether or not patented, without express written authorization of Hydroid, Inc is prohibited. The Proprietary Information is submitted under confidential and privileged relationship between parties and the recipient agrees by accepting the Proprietary Information to abide by the restrictions set forth above. No license under any patents or technology is granted or conveyed by any disclosure or transfer hereunder and all information disclosed shall remain the property of Hydroid, Inc.
This Proprietary Legend applies to all pages within this document so marked.
/ 1 / 22-Mar-12
Confidentiality Statement
AUV’S IN EXTREME ENVIRONMENTS
Graham Lester – Kongsberg Maritime
Oceanology International 2012 / 2 / 22-Mar-12
/ 3 /
Kongsberg Organization

Kongsberg Defense and Protec Systems
PROTECTOR - Remote Weapon Station (RWS) is a remotely controlled weapon station for light and medium caliber weapons and can be mounted on any type of platform. PROTECTOR has been in full scale production since December 2001. Since then more than 15, 000 systems have been sold to 17 nations.
Kongsberg – the oldest industrial company in Norway rooted in a tradition of providing products and services for the harshest environments: deep ocean, off shore, commercial fisheries, defense, space.
The NASAMS (Norwegian Advanced Surface to Air Missile System) version of SL-AMRAAM is operationally deployed internationally
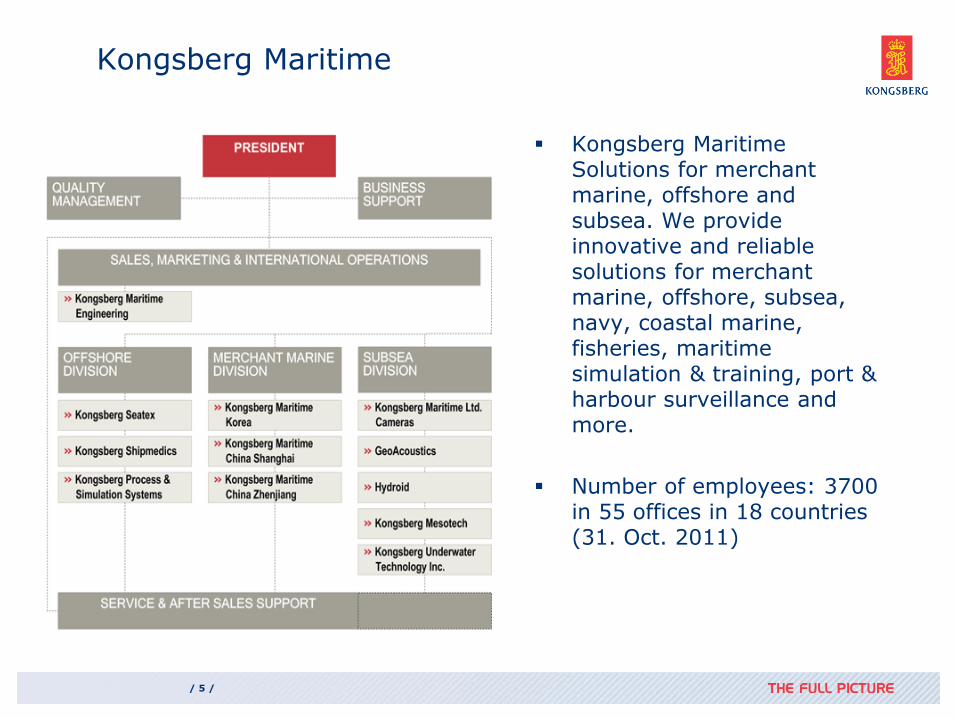
Kongsberg Maritime
Kongsberg Maritime Solutions for merchant marine, offshore and subsea. We provide innovative and reliable solutions for merchant marine, offshore, subsea, navy, coastal marine, fisheries, maritime simulation & training, port & harbour surveillance and more.
Number of employees: 3700 in 55 offices in 18 countries (31. Oct. 2011)
/ 5 /

/ 6 /
The Kongsberg Group Kongsberg Maritime – Subsea Division
Seabed mapping
AUV systems
Underwater surveillance
Naval sonar
Fisheries systems
Acoustic control systems
Underwater
positioning
Camera systems
AUV’s in Extreme Environments
An extreme environment exhibits extreme conditions which are challenging to most life forms.
An extreme environment is one place where humans generally do not live or could die there.
Examples of extreme environments include the geographic poles, deep ocean trenches, geothermal sites, minefields, war zones and adverse weather conditions
/ 7 / 22-Mar-12
/ 8 / 22-Mar-12
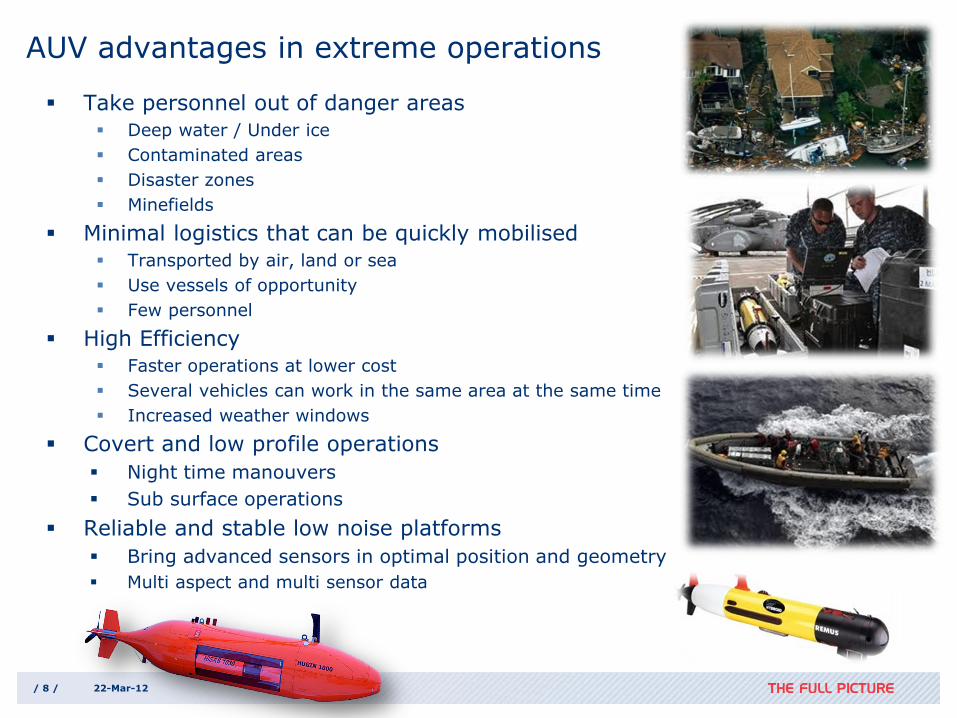
AUV advantages in extreme operations
Take personnel out of danger areas
Deep water / Under ice
Contaminated areas
Disaster zones
Minefields
Minimal logistics that can be quickly mobilised
Transported by air, land or sea
Use vessels of opportunity
Few personnel
High Efficiency
Faster operations at lower cost
Several vehicles can work in the same area at the same time
Increased weather windows
Covert and low profile operations
Night time manouvers
Sub surface operations
Reliable and stable low noise platforms
Bring advanced sensors in optimal position and geometry
Multi aspect and multi sensor data
Hurricane hits Galveston, Texas
/ Bergan /
/ 10 /
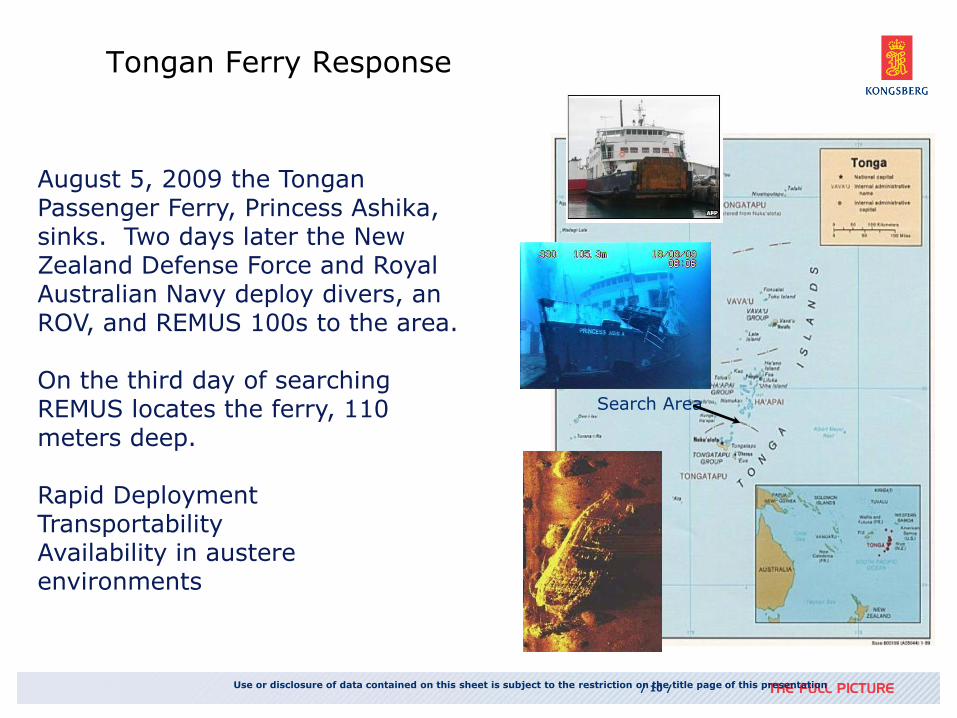
Tongan Ferry Response
Use or disclosure of data contained on this sheet is subject to the restriction on the title page of this presentation
August 5, 2009 the Tongan Passenger Ferry, Princess Ashika, sinks. Two days later the New Zealand Defense Force and Royal Australian Navy deploy divers, an ROV, and REMUS 100s to the area. On the third day of searching REMUS locates the ferry, 110 meters deep. Rapid Deployment Transportability Availability in austere environments
Search Area

/ 11 / 22-Mar-12
Covert operations

MK 18 Mod 12 metre RHIB Operations
/ 13 /
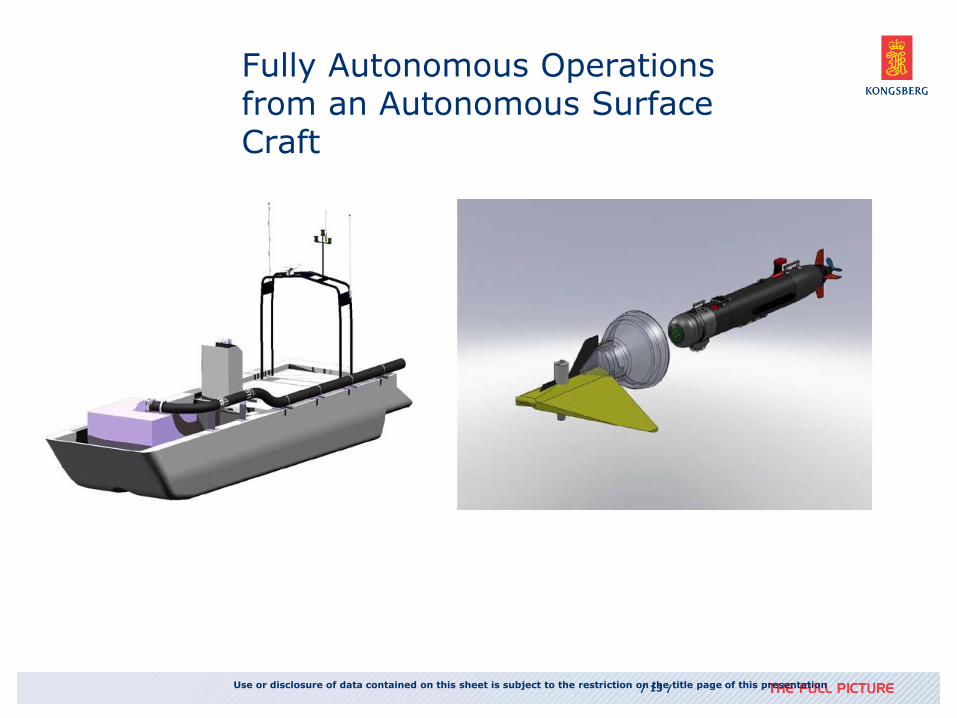
Fully Autonomous Operations from an Autonomous Surface Craft
Use or disclosure of data contained on this sheet is subject to the restriction on the title page of this presentation
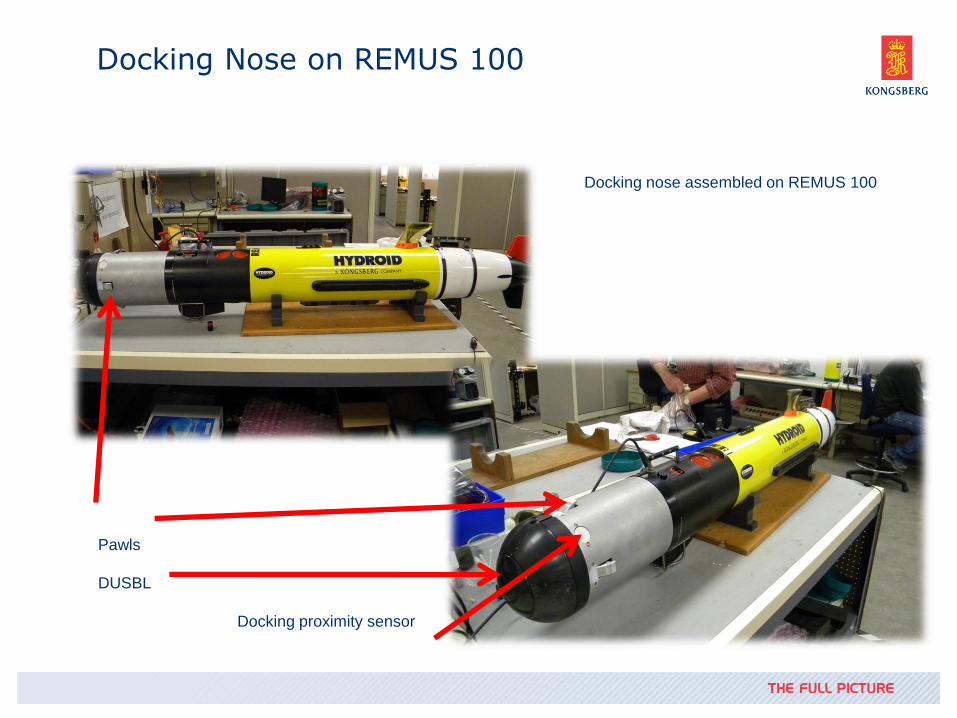
Docking Nose on REMUS 100
Docking nose assembled on REMUS 100
Pawls
DUSBL
Docking proximity sensor
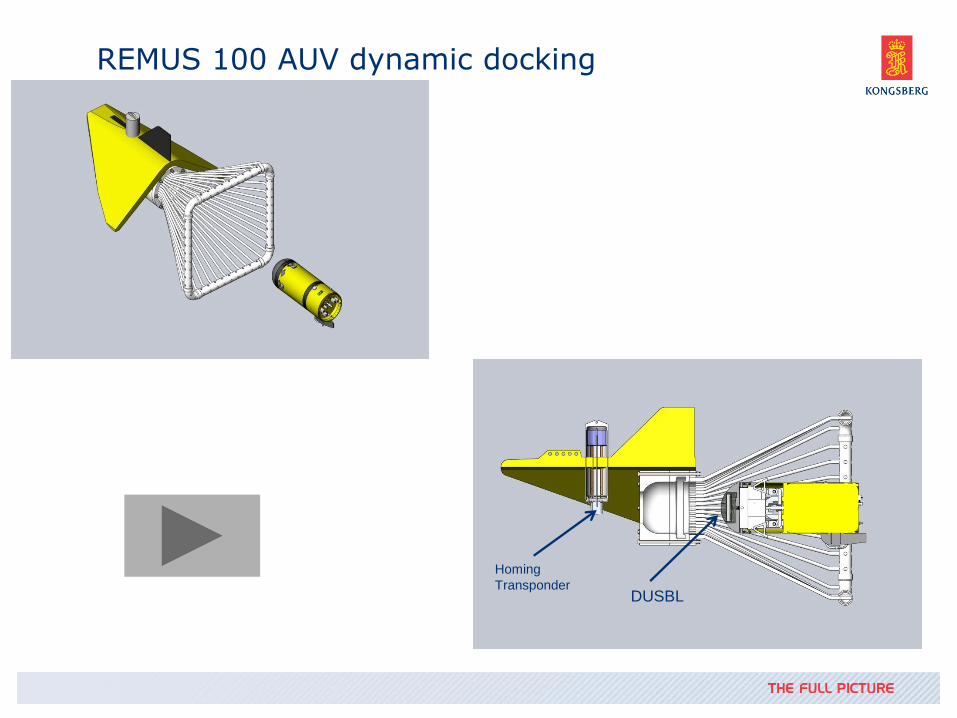
REMUS 100 AUV dynamic docking
Homing
Transponder DUSBL
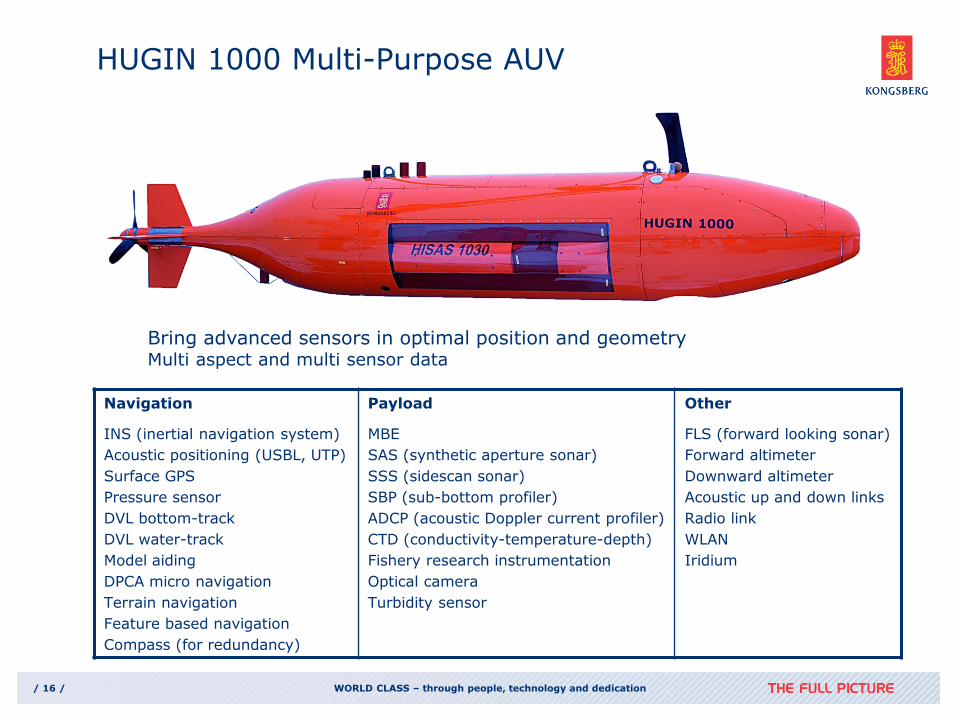
HUGIN 1000 Multi-Purpose AUV
WORLD CLASS – through people, technology and dedication / 16 /
Navigation
INS (inertial navigation system)
Acoustic positioning (USBL, UTP)
Surface GPS
Pressure sensor
DVL bottom-track
DVL water-track
Model aiding
DPCA micro navigation
Terrain navigation
Feature based navigation
Compass (for redundancy)
Payload
MBE
SAS (synthetic aperture sonar)
SSS (sidescan sonar)
SBP (sub-bottom profiler)
ADCP (acoustic Doppler current profiler)
CTD (conductivity-temperature-depth)
Fishery research instrumentation
Optical camera
Turbidity sensor
Other
FLS (forward looking sonar)
Forward altimeter
Downward altimeter
Acoustic up and down links
Radio link
WLAN
Iridium
Bring advanced sensors in optimal position and geometry Multi aspect and multi sensor data
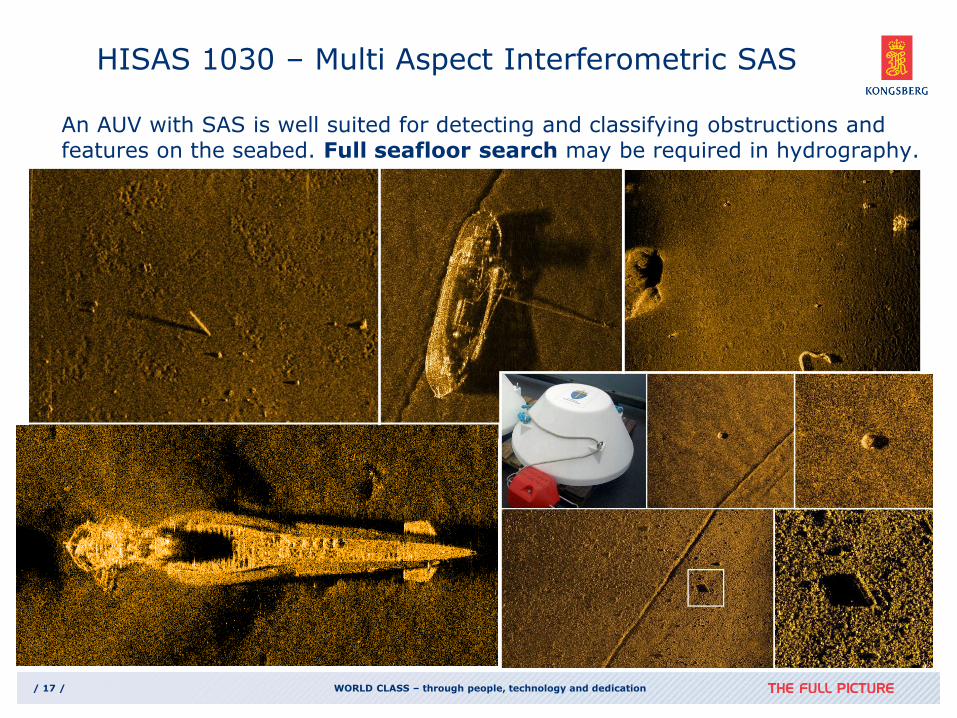
HISAS 1030 – Multi Aspect Interferometric SAS
WORLD CLASS – through people, technology and dedication / 17 /
An AUV with SAS is well suited for detecting and classifying obstructions and features on the seabed. Full seafloor search may be required in hydrography.
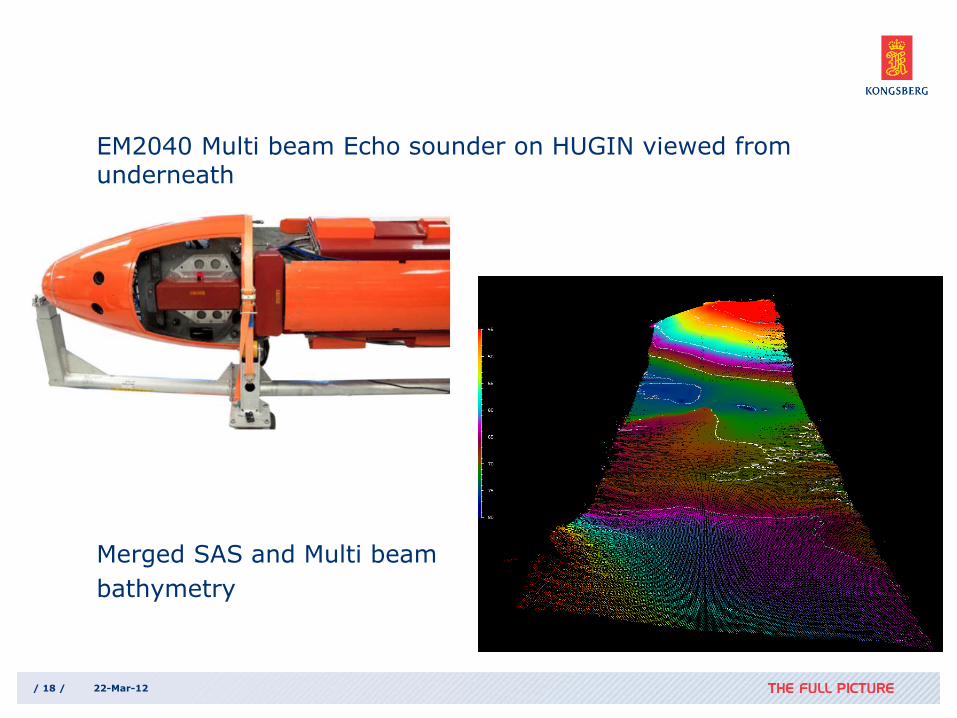
EM2040 Multi beam Echo sounder on HUGIN viewed from underneath
Merged SAS and Multi beam
bathymetry
/ 18 / 22-Mar-12
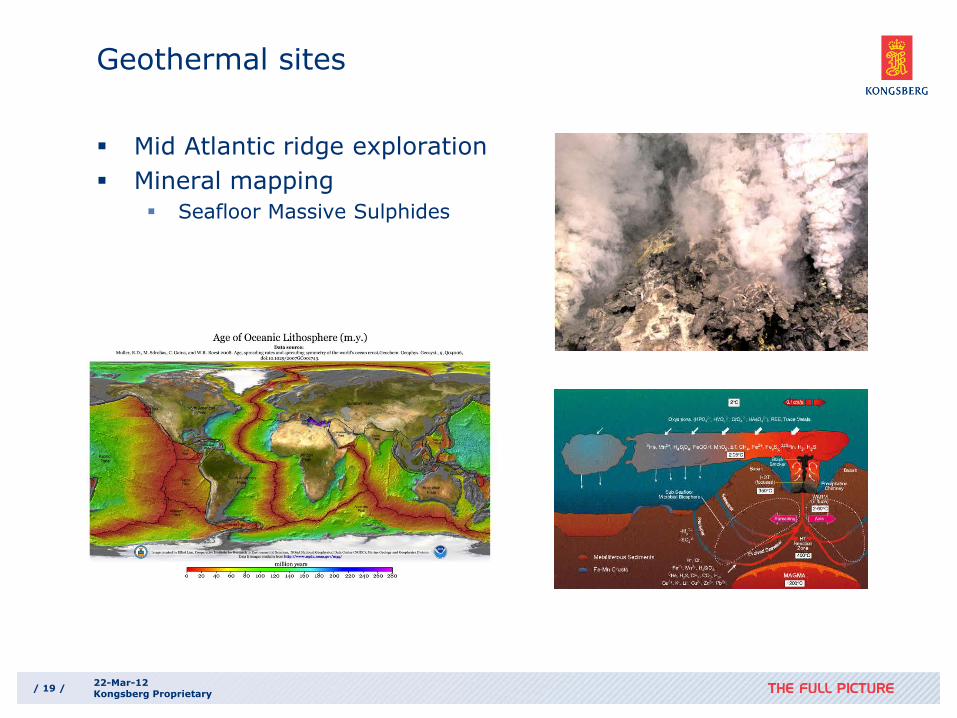
Geothermal sites
Mid Atlantic ridge exploration
Mineral mapping
Seafloor Massive Sulphides
/ 19 / 22-Mar-12 Kongsberg Proprietary

/ 20 / 22-Mar-12 Kongsberg Proprietary
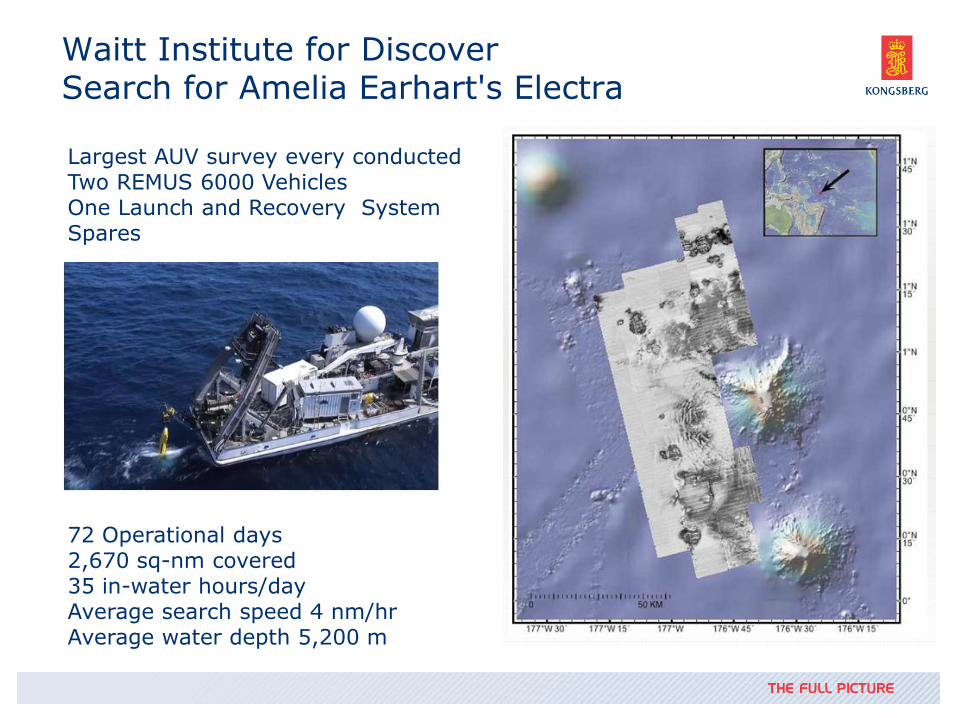
Waitt Institute for Discover Search for Amelia Earhart's Electra
Largest AUV survey every conducted Two REMUS 6000 Vehicles One Launch and Recovery System Spares
72 Operational days 2,670 sq-nm covered 35 in-water hours/day Average search speed 4 nm/hr Average water depth 5,200 m

Search For Air France Flight 447
Three REMUS 6000 vehicles operated simultaneously One Launch and Recovery System and support vans One Ship – 24 hour operations
Air France Flight 447 was a scheduled commercial flight from Rio de Janeiro to Paris involving an Airbus A330-200 aircraft that crashed into the Atlantic Ocean on 1 June 2009, killing all 216 Passengers and 12 aircrew

Air France Flight 447
Ocean Observatories Initiative
The OOI is a long-term, NSF-funded program to provide 25-30 years of sustained ocean measurements to study climate variability, ocean circulation and ecosystem dynamics, air-sea exchange, seafloor processes, and plate-scale geodynamics
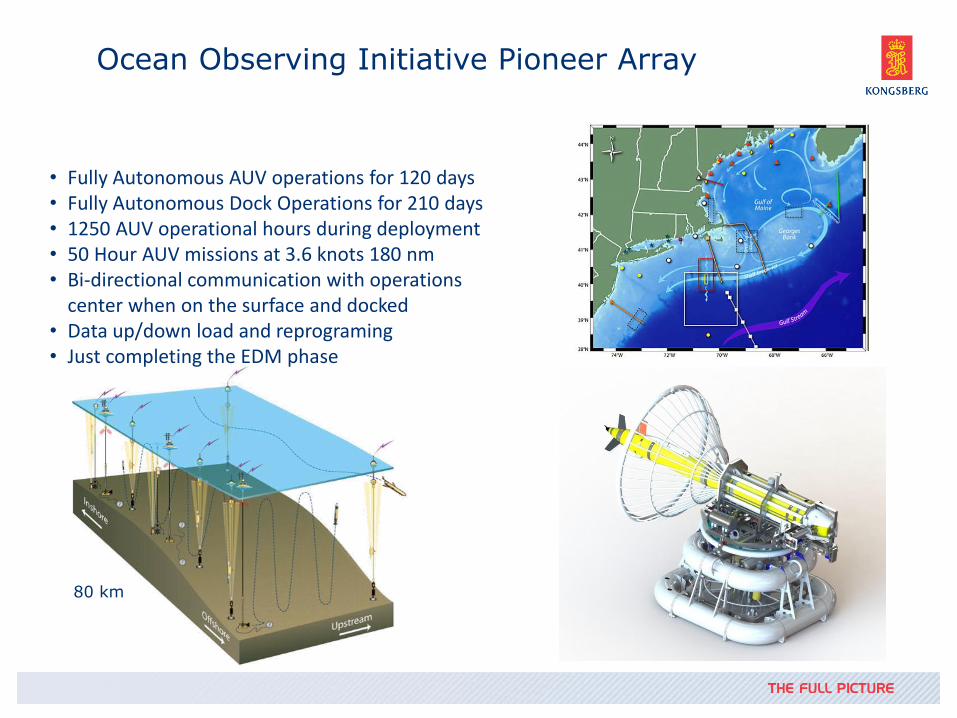
Ocean Observing Initiative Pioneer Array
• Fully Autonomous AUV operations for 120 days • Fully Autonomous Dock Operations for 210 days • 1250 AUV operational hours during deployment • 50 Hour AUV missions at 3.6 knots 180 nm • Bi-directional communication with operations
center when on the surface and docked • Data up/down load and reprograming • Just completing the EDM phase
80 km
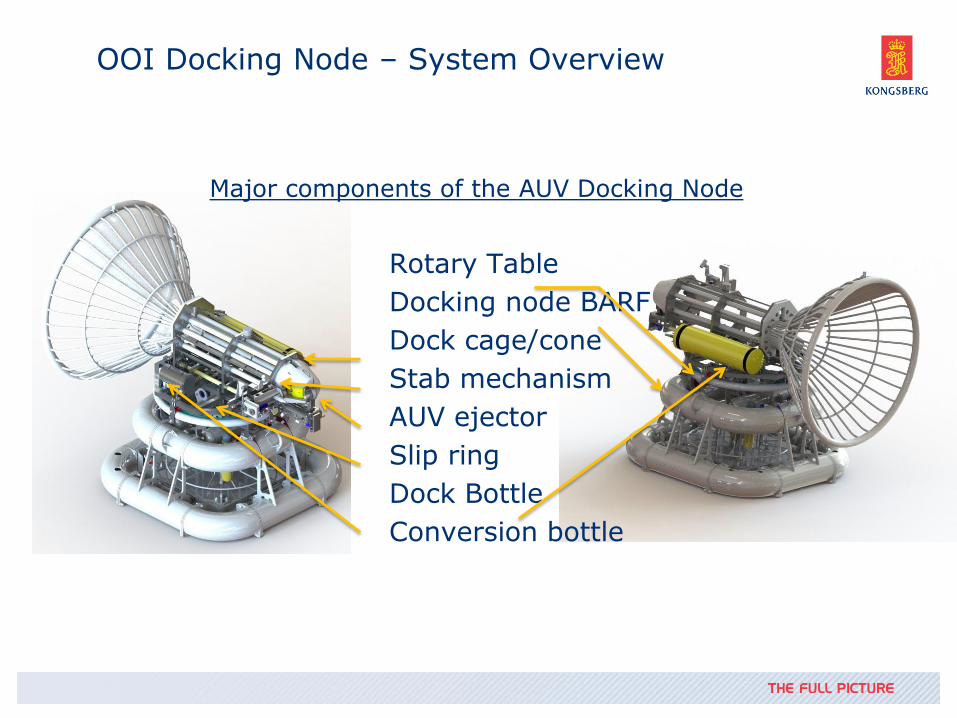
OOI Docking Node – System Overview
Major components of the AUV Docking Node
Rotary Table
Docking node BARF
Dock cage/cone
Stab mechanism
AUV ejector
Slip ring
Dock Bottle
Conversion bottle
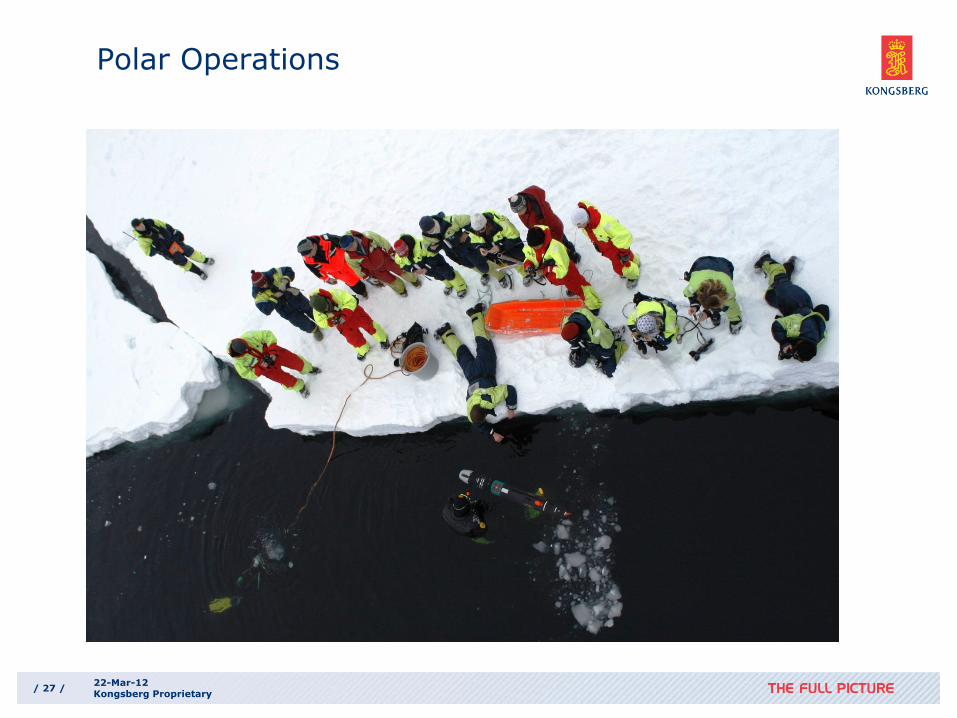
Polar Operations
/ 27 / 22-Mar-12 Kongsberg Proprietary
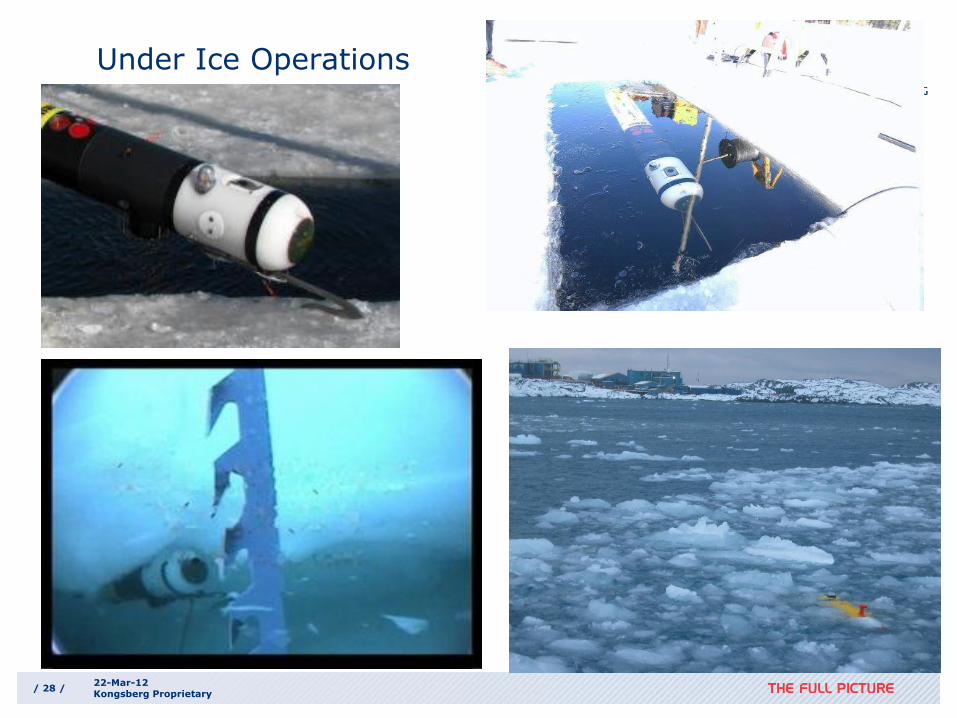
Under Ice Operations
/ 28 / 22-Mar-12 Kongsberg Proprietary
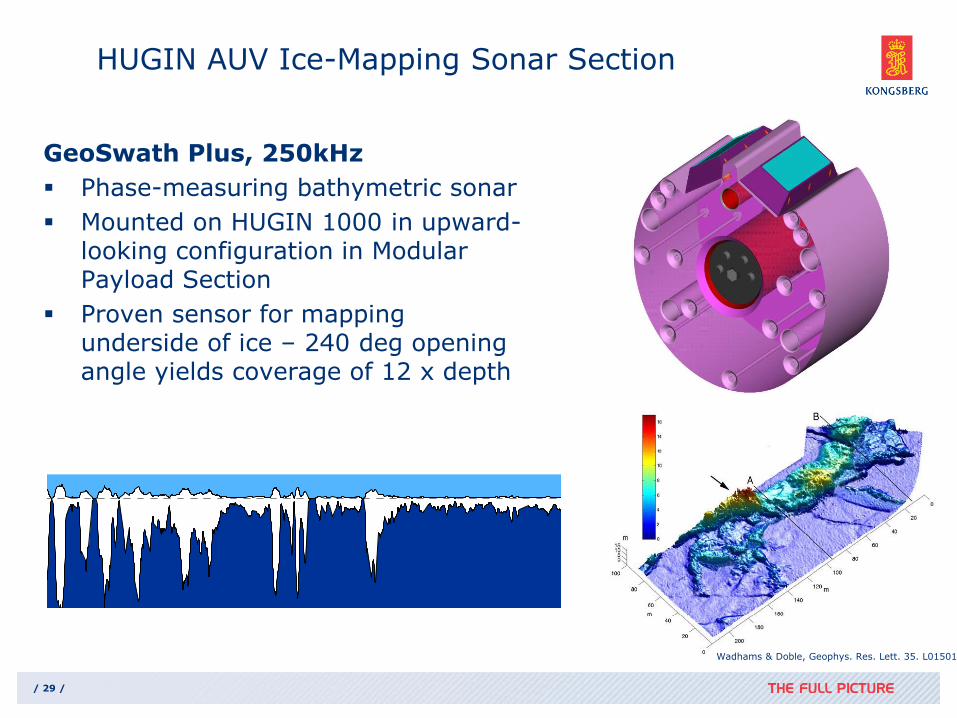
GeoSwath Plus, 250kHz
Phase-measuring bathymetric sonar
Mounted on HUGIN 1000 in upward-looking configuration in Modular Payload Section
Proven sensor for mapping underside of ice – 240 deg opening angle yields coverage of 12 x depth
/ 29 /
HUGIN AUV Ice-Mapping Sonar Section
0 1 2 3 4 5 6 7 8 9 10
-12
-10
-8
-6
-4
-2
0
2
-12
-10
-8
-6
-4
-2
0
2
Th
ickn
ess (m
)
Distance [km]
Wadhams & Doble, Geophys. Res. Lett. 35. L01501 (2008)
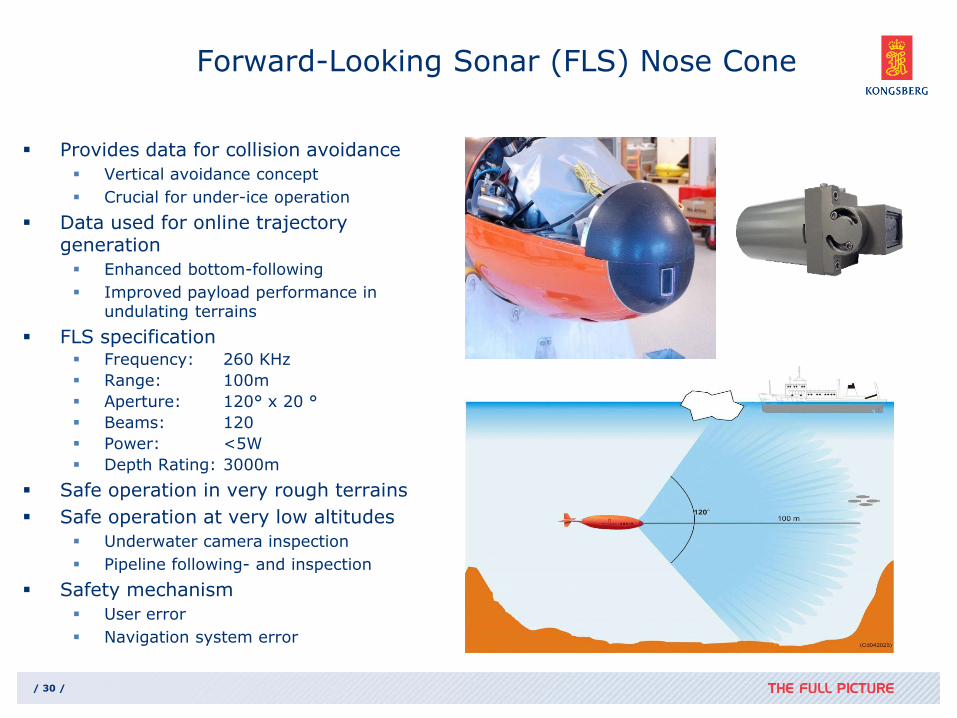
Provides data for collision avoidance
Vertical avoidance concept
Crucial for under-ice operation
Data used for online trajectory generation
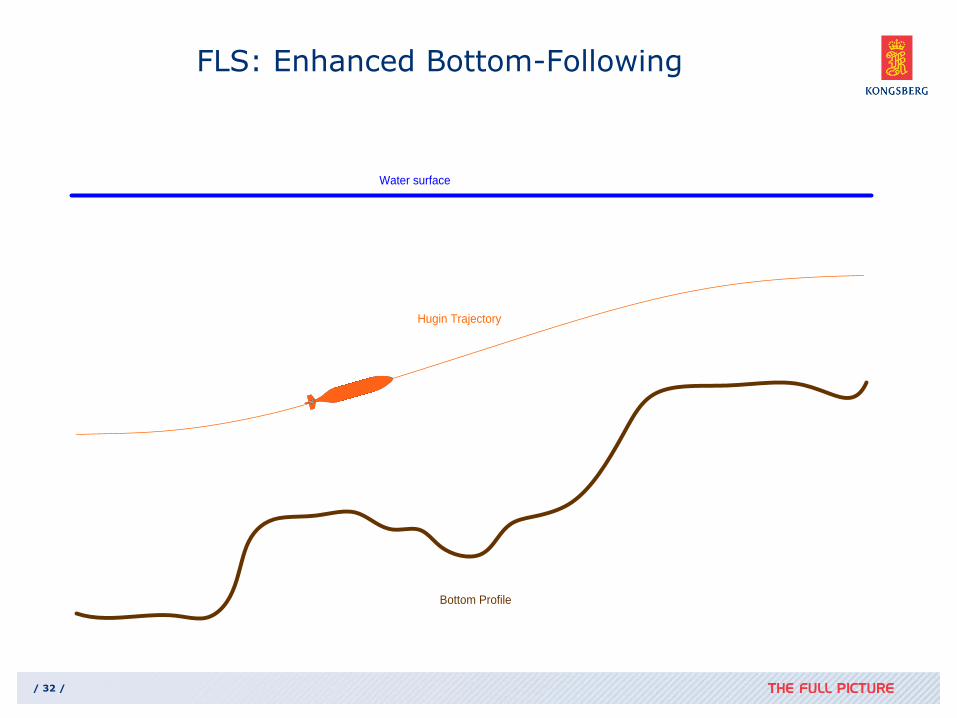
Enhanced bottom-following
Improved payload performance in undulating terrains
FLS specification Frequency: 260 KHz
Range: 100m
Aperture: 120° x 20 °
Beams: 120
Power: <5W
Depth Rating: 3000m
Safe operation in very rough terrains
Safe operation at very low altitudes
Underwater camera inspection
Pipeline following- and inspection
Safety mechanism
User error
Navigation system error
/ 30 /
Forward-Looking Sonar (FLS) Nose Cone

Based on a Forward Looking Sonar mounted in nose
Uses ”vertical avoidance” principle
See both bottom and ice simultaneously
For system robustness and redundancy – two altimeters used as add’l inputs
Ice Collision Avoidance System
/ 32 /
FLS: Enhanced Bottom-Following
Water surface
Bottom Profile
Hugin Trajectory
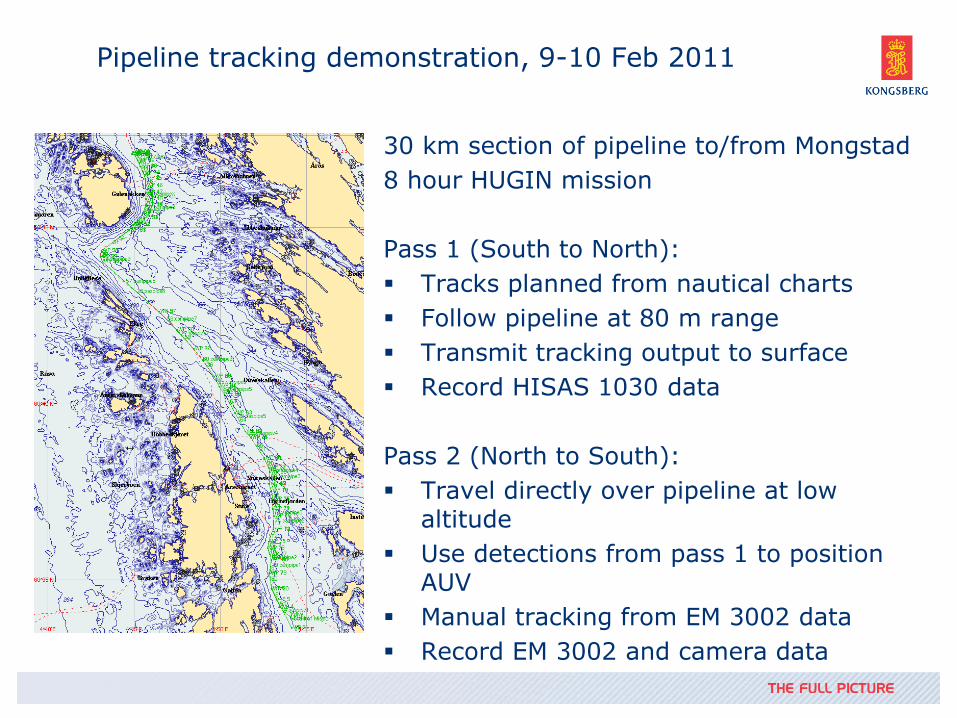
Pipeline tracking demonstration, 9-10 Feb 2011
30 km section of pipeline to/from Mongstad
8 hour HUGIN mission
Pass 1 (South to North):
Tracks planned from nautical charts
Follow pipeline at 80 m range
Transmit tracking output to surface
Record HISAS 1030 data
Pass 2 (North to South):
Travel directly over pipeline at low altitude
Use detections from pass 1 to position AUV
Manual tracking from EM 3002 data
Record EM 3002 and camera data

Real-time pipeline detection and tracking
Possible pipelines detected and tracked based on real-time side scan imagery from HISAS 1030
Most likely candidate selected based on prior information on position and orientation
HUGIN follows selected candidate at desired range (here: 80 m)
Selected tracks transmitted to surface on acoustic link (for demo purposes)
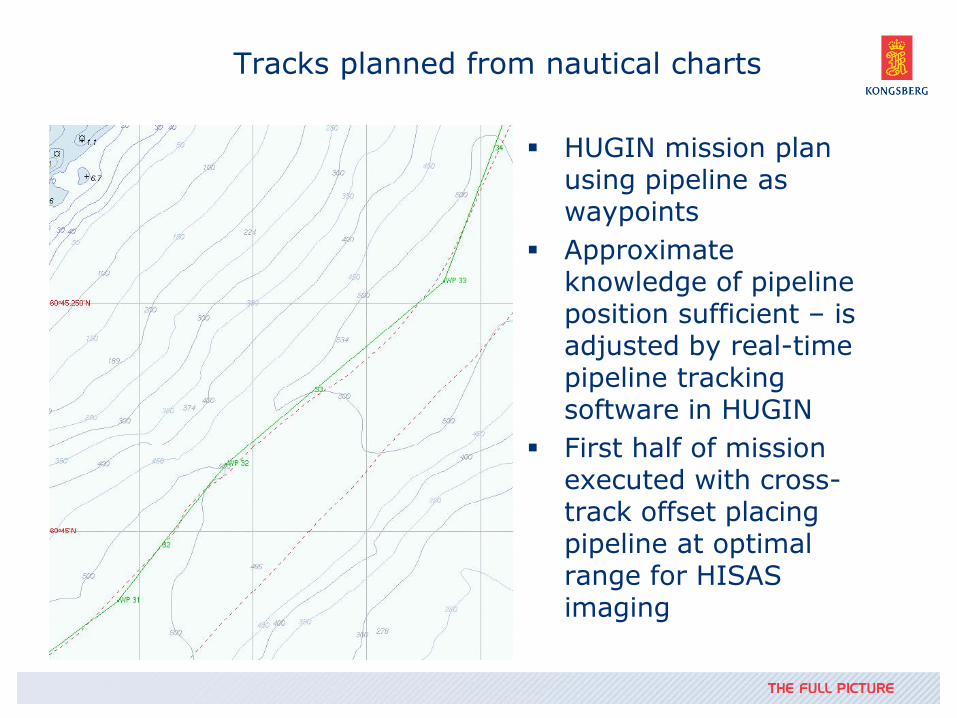
Tracks planned from nautical charts
HUGIN mission plan using pipeline as waypoints
Approximate knowledge of pipeline position sufficient – is adjusted by real-time pipeline tracking software in HUGIN
First half of mission executed with cross-track offset placing pipeline at optimal range for HISAS imaging

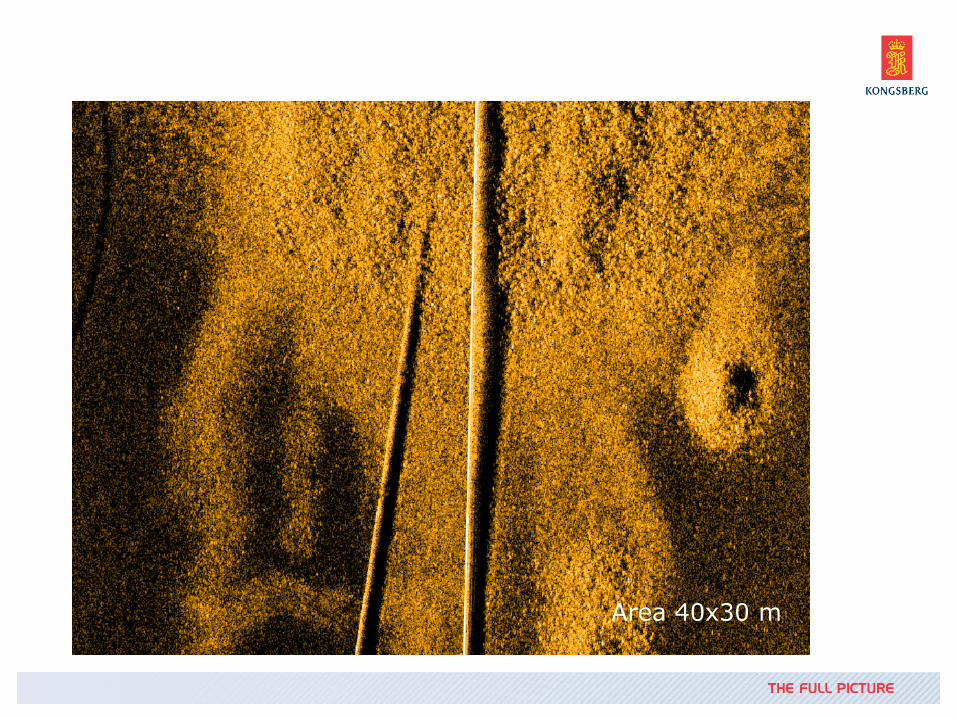
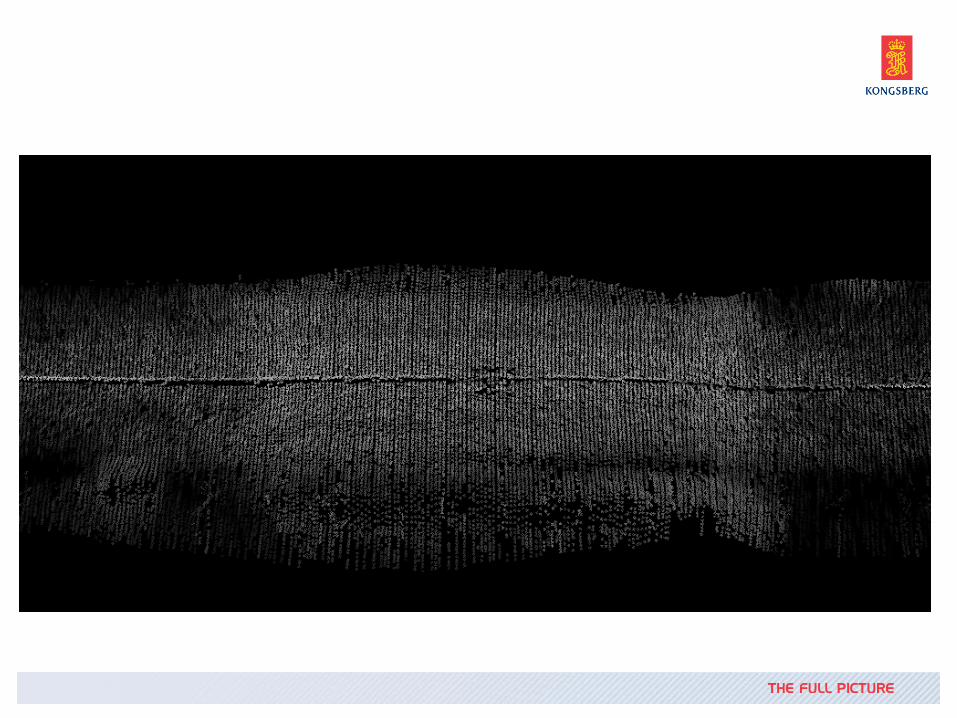
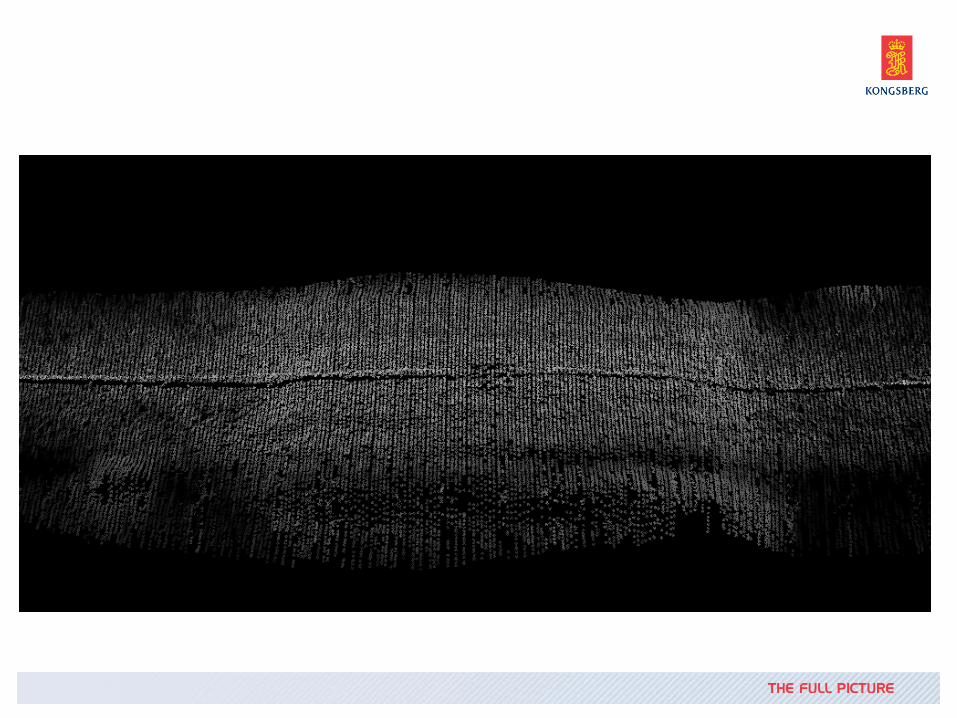
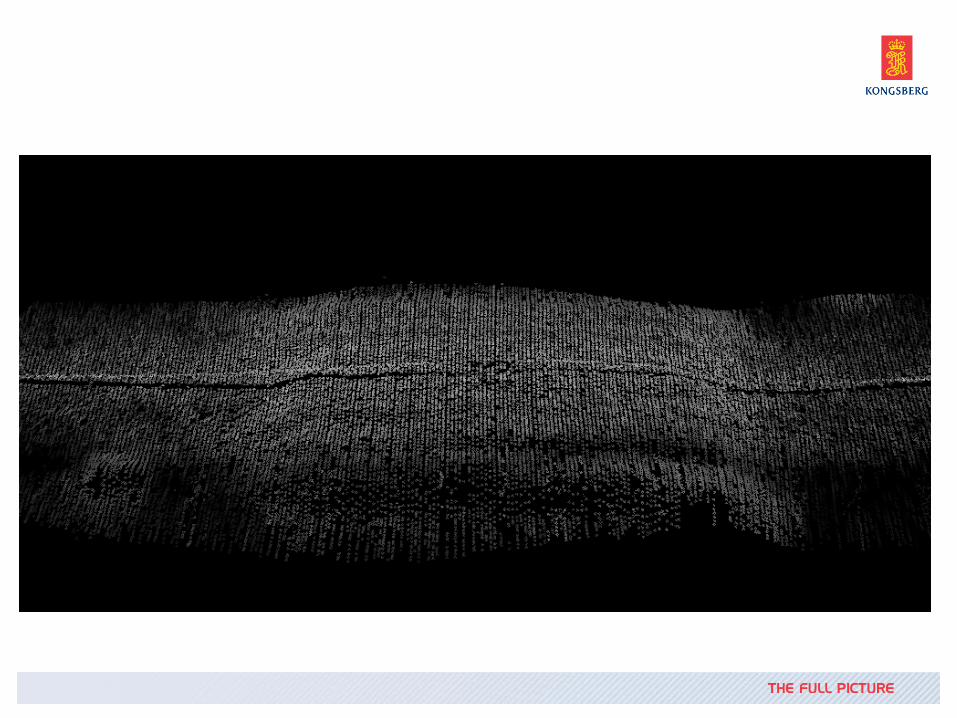
SAS Images of Pipeline (Standard Processing)
50x100 m 50x100 m 10x10 m
10x10 m
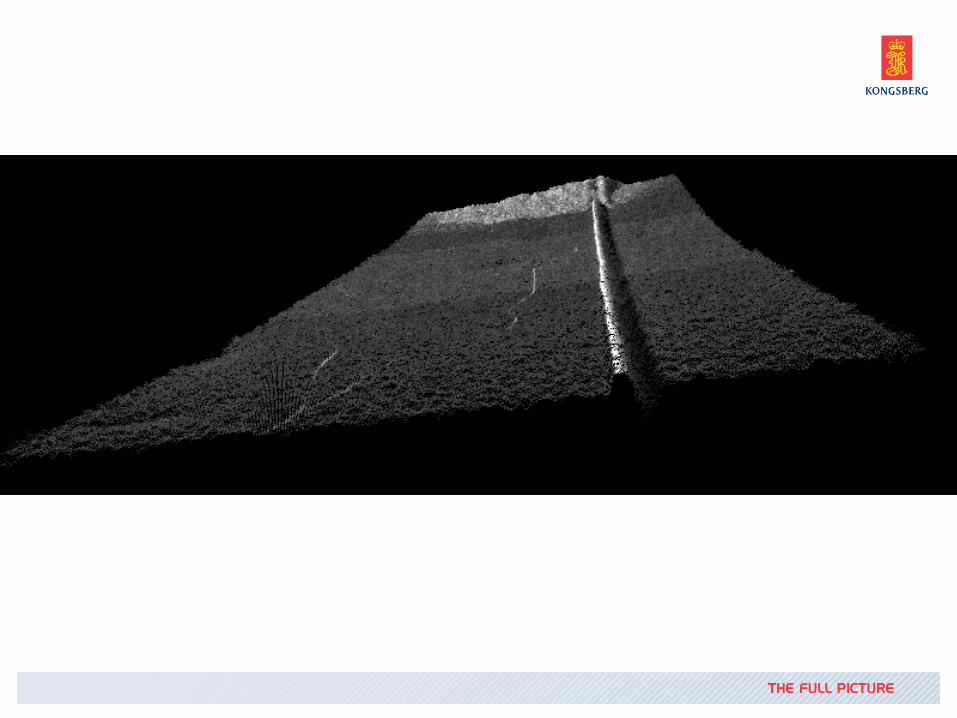
SAS Bathymetry
Processed HISAS data from same area
Area 40x30 m
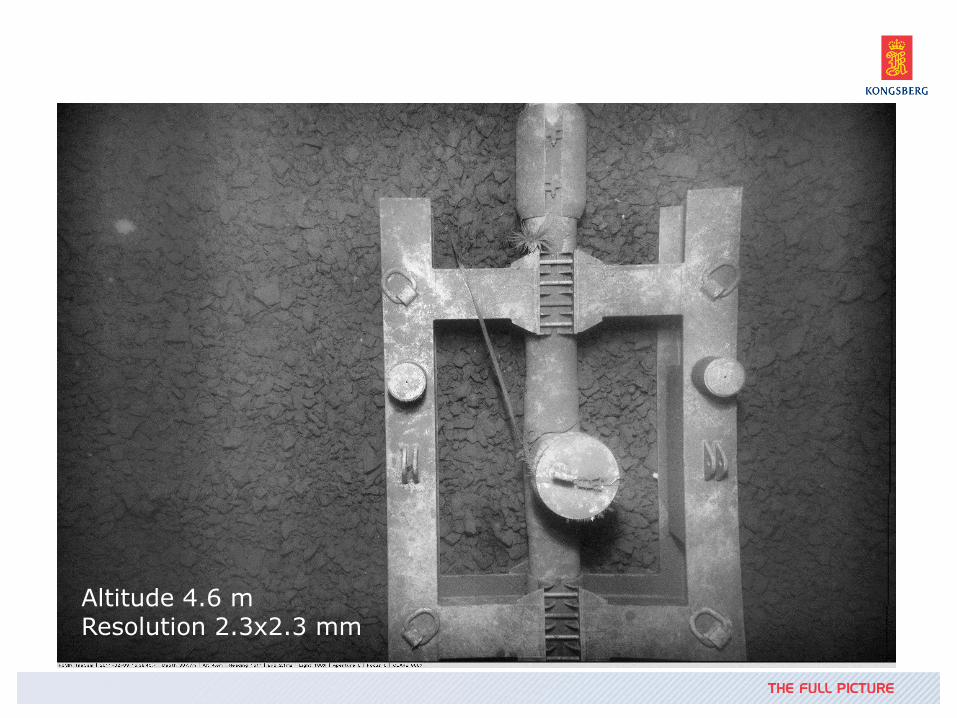
Data from TileCam still image camera
Altitude 4.6 m Resolution 2.3x2.3 mm

Data from TileCam still image camera
Altitude 4.6 m Resolution 2.3x2.3 mm
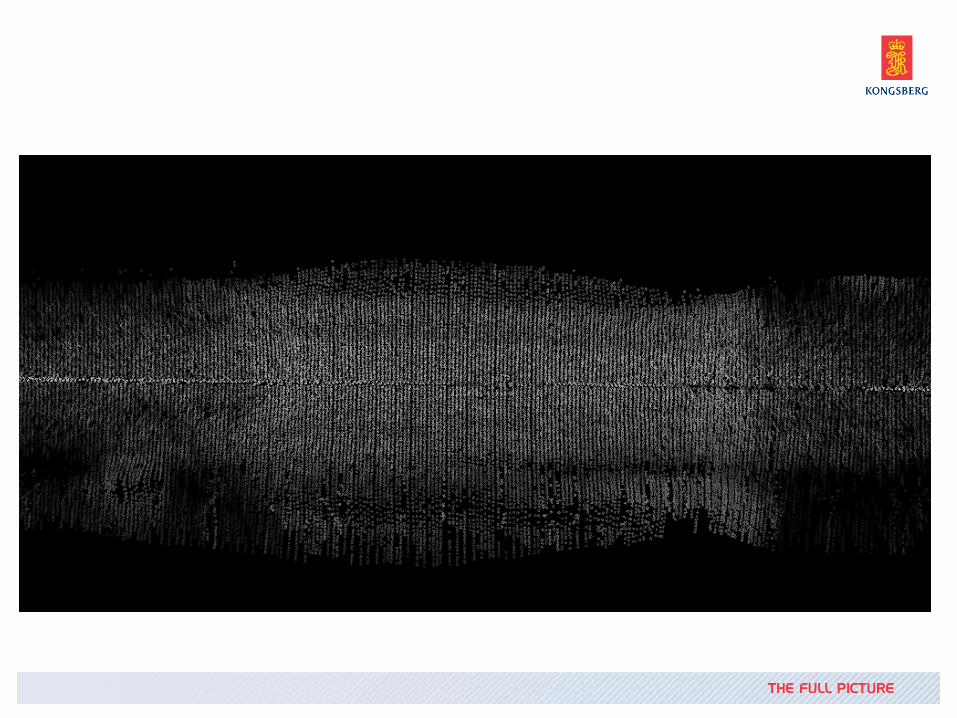
EM 3002 data from same pass
EM 3002 data from same pass
EM 3002 data from same pass
EM 3002 data from same pass

HUGIN AUV Leakage Detection
1. Acoustic leakage detection
Multibeam echo sounde
Synthetic aperture sonar
2. Digital still camera
3. CTD
4. CONTROS HydroC
CH4 Selective measurement
PAH
/ 45 / 22-Mar-12
Leakage detection with EM 2040
HydroC integration HUGIN 1000 HUGIN 1000 digitial still camera
In Conclusion
AUV’s are successfully being utilised in extreme environments
AUV’s bring significant benefit to search, survey and inspection operations especially in remote or inaccessible locations.
Operate from shallow to deep in polar to equatorial locations
Kongsberg provide innovative and reliable AUV solutions that are proven worldwide
To find out more visit us on booth E600
/ 46 / 22-Mar-12 Kongsberg Proprietary
KONGSBERG MARITIME EXTREME PERFORMANCE
FOR EXTREME CONDITIONS
Graham Lester – Kongsberg Maritime
Oceanology International 2012 / 47 / 22-Mar-12