Embed Size (px)
Citation preview
Harmonious Systems Engineering Lab.
小型屋内自律飛行船複数駆動系の分散協調制御に関する研究 A study on cooperative distributed control of
multiple motors for indoor blimp robot
複合情報学専攻 複雑系工学講座
調和系工学研究室 修士2年 西岡 良太
Harmonious Systems Engineering Lab.
背景
複雑系
複数の要因の相互作用で系全体の振る舞いが決定
小型屋内自律飛行船
モータ同士の相互作用によって飛行船全体の動きが決定
マルチエージェント
分散協調制御::各駆動系(モータ)をエージェントに見立てて 互いに協調
飛行船の動きによって影響を与える要因によらずにロバストな制御を行う
飛行船の動き:モータ推力、外乱
自己組織化した系の振る舞い
Harmonious Systems Engineering Lab.
目的
屋内飛行船への分散協調制御の適用可能性の検証
動きの変化の要因によらないロバストな制御の実現
•動きの変化を起こすためにモータの故障を考慮
Harmonious Systems Engineering Lab.
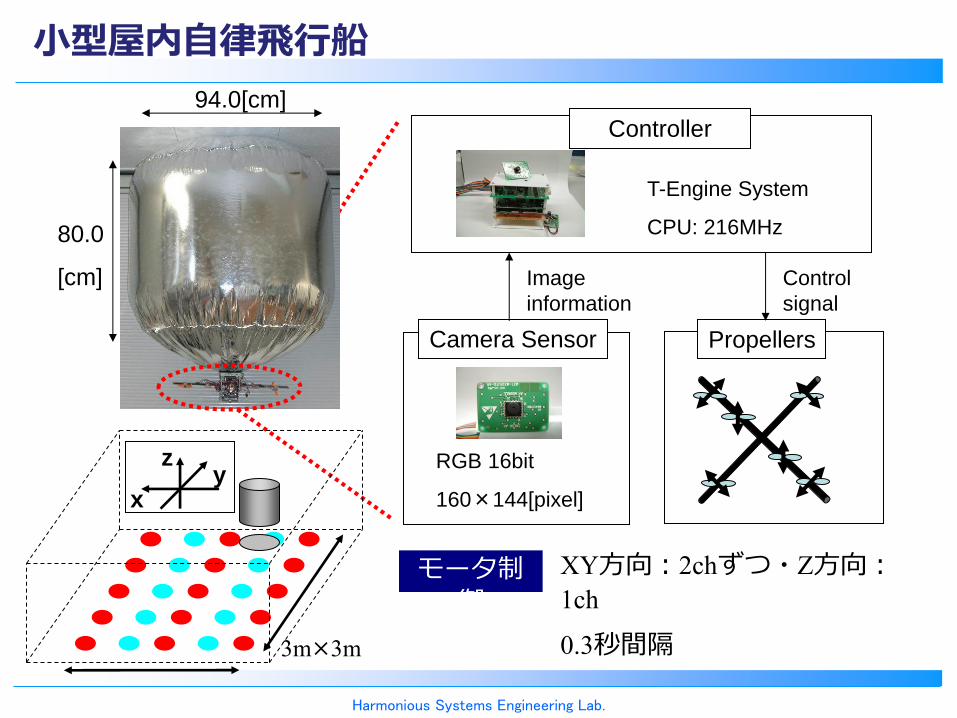
小型屋内自律飛行船
94.0[cm]
80.0
[cm]
Camera Sensor
Controller
RGB 16bit
160×144[pixel]
T-Engine System
CPU: 216MHz
Propellers
Image
information
Control
signal
x y
z
3m×3m
モータ制御
XY方向:2chずつ・Z方向:
1ch
0.3秒間隔
Harmonious Systems Engineering Lab.
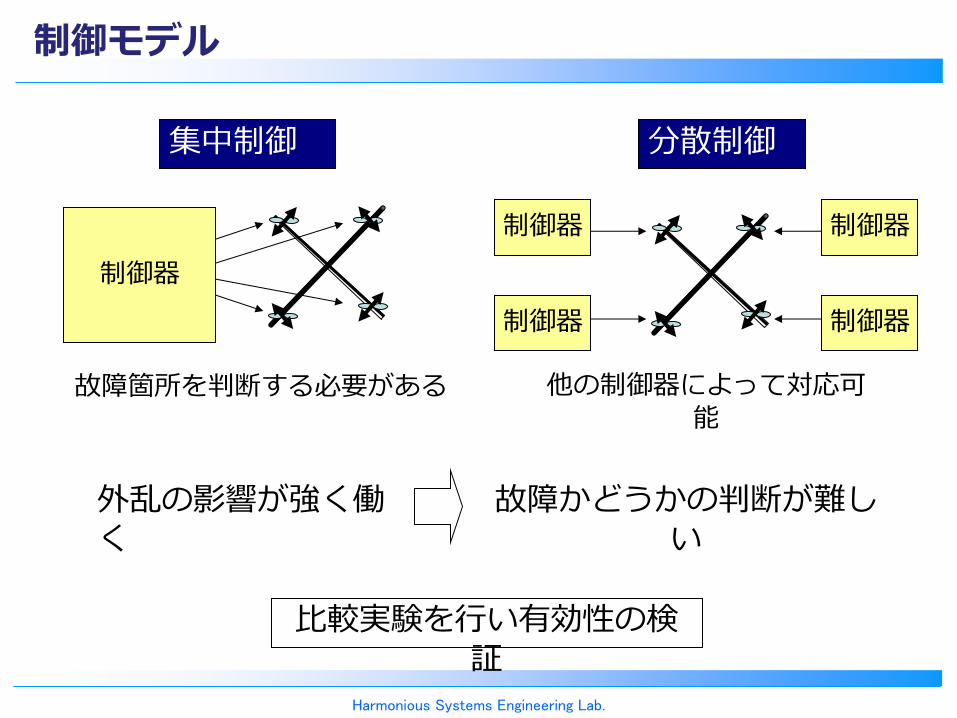
制御モデル
集中制御 分散制御
外乱の影響が強く働く
故障かどうかの判断が難しい
制御器
制御器
制御器
制御器
制御器
故障箇所を判断する必要がある 他の制御器によって対応可能
比較実験を行い有効性の検証
Harmonious Systems Engineering Lab.
制御器
ニューラルネットワー
ク
飛行船の動いた結果を用いて出力を計算
汎化能力によって未経験の動きにある程度対応
遺伝的アルゴリズム ニューラルネットワークのパラメータの最適化
飛行船の動きに対応して協調した推力を学習する
Harmonious Systems Engineering Lab.
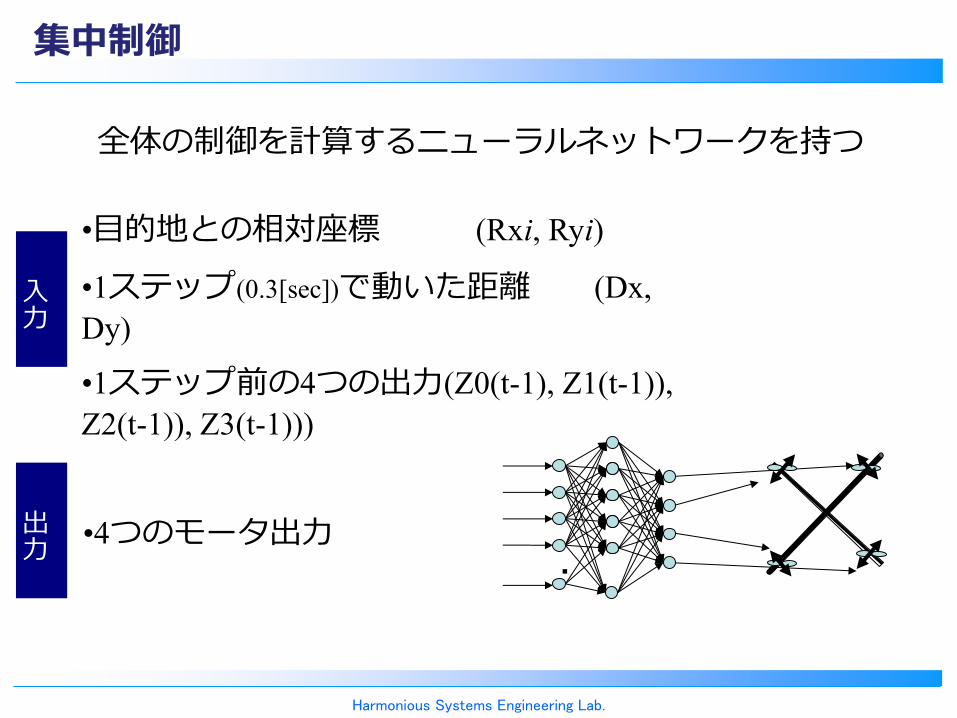
集中制御
全体の制御を計算するニューラルネットワークを持つ
・
•目的地との相対座標 (Rxi, Ryi)
•1ステップ(0.3[sec])で動いた距離 (Dx,
Dy)
•1ステップ前の4つの出力(Z0(t-1), Z1(t-1)),
Z2(t-1)), Z3(t-1)))
•4つのモータ出力
入力
出力
Harmonious Systems Engineering Lab.
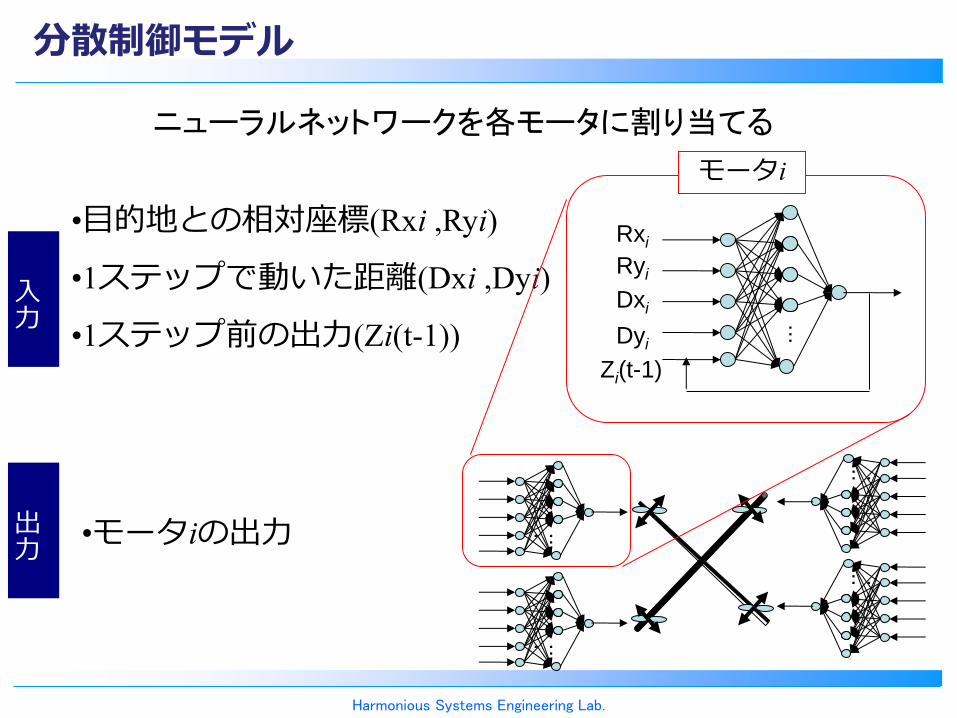
分散制御モデル
ニューラルネットワークを各モータに割り当てる
・・・
・・・
・・・
・・・
・・・
Rxi
Ryi
Dxi
Dyi
Zi(t-1)
•目的地との相対座標(Rxi ,Ryi)
•1ステップで動いた距離(Dxi ,Dyi)
•1ステップ前の出力(Zi(t-1))
•モータiの出力
入力
出力
モータi
Harmonious Systems Engineering Lab.
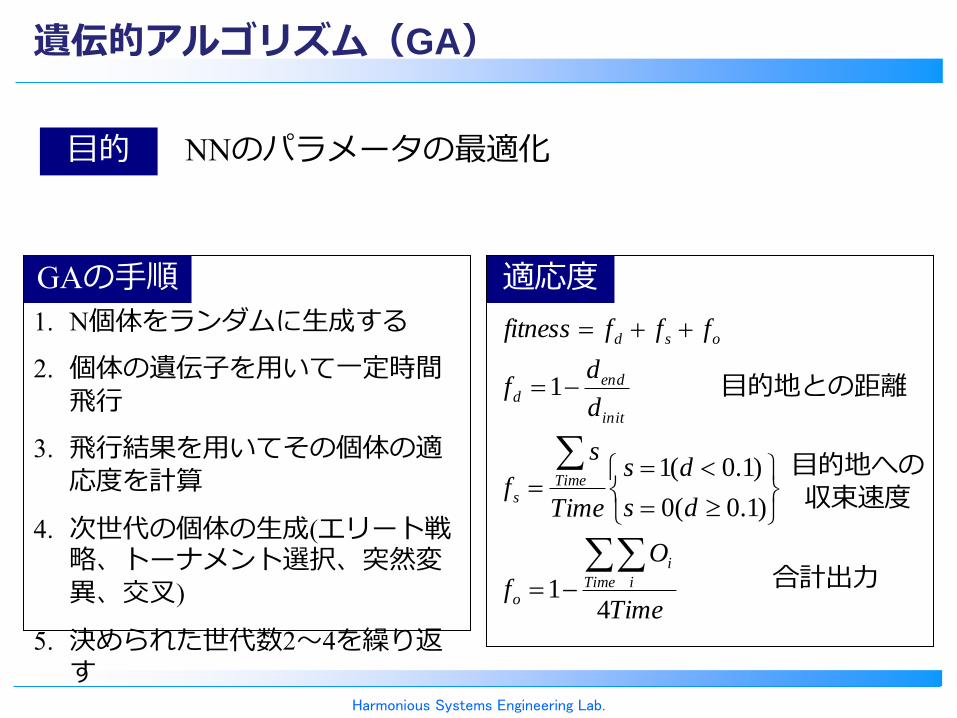
遺伝的アルゴリズム(GA)
1. N個体をランダムに生成する
2. 個体の遺伝子を用いて一定時間飛行
3. 飛行結果を用いてその個体の適応度を計算
4. 次世代の個体の生成(エリート戦略、トーナメント選択、突然変異、交叉)
5. 決められた世代数2~4を繰り返す
目的 NNのパラメータの最適化
Time
O
f
ds
ds
Time
s
f
d
df
ffffitness
Time i
i
o
Times
init
endd
osd
41
)1.0(0
)1.0(1
1
目的地との距離
目的地への収束速度
合計出力
適応度 GAの手順
Harmonious Systems Engineering Lab.
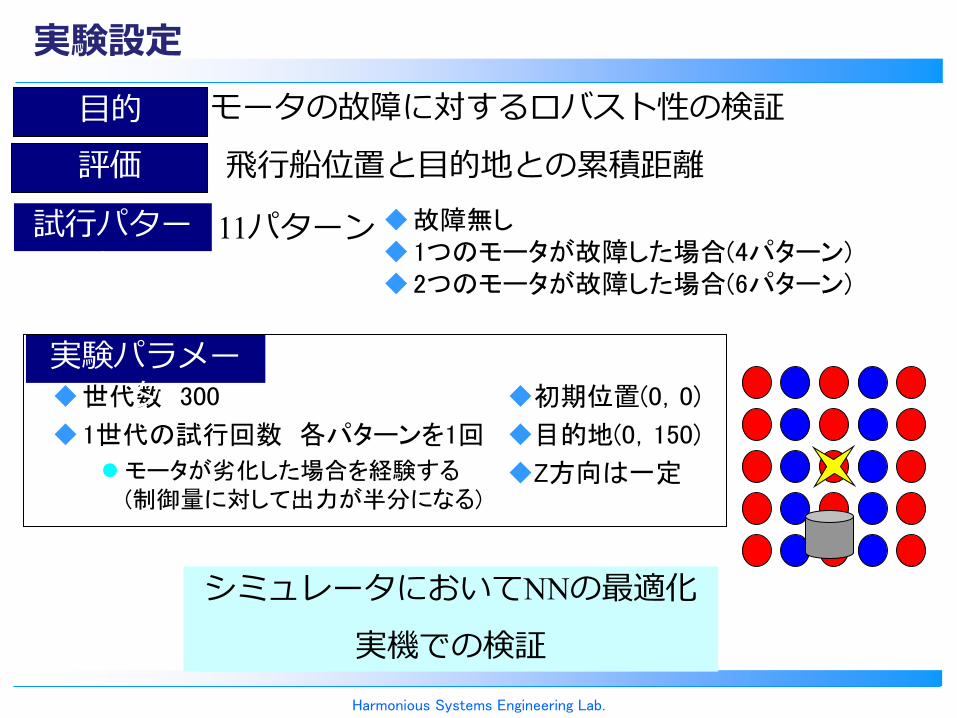
実験設定
故障無し 1つのモータが故障した場合(4パターン) 2つのモータが故障した場合(6パターン)
世代数 300
1世代の試行回数 各パターンを1回
モータが劣化した場合を経験する (制御量に対して出力が半分になる)
目的 モータの故障に対するロバスト性の検証
飛行船位置と目的地との累積距離 評価
試行パターン
11パターン
初期位置(0,0)
目的地(0,150)
Z方向は一定
実験パラメータ
シミュレータにおいてNNの最適化
実機での検証
Harmonious Systems Engineering Lab.
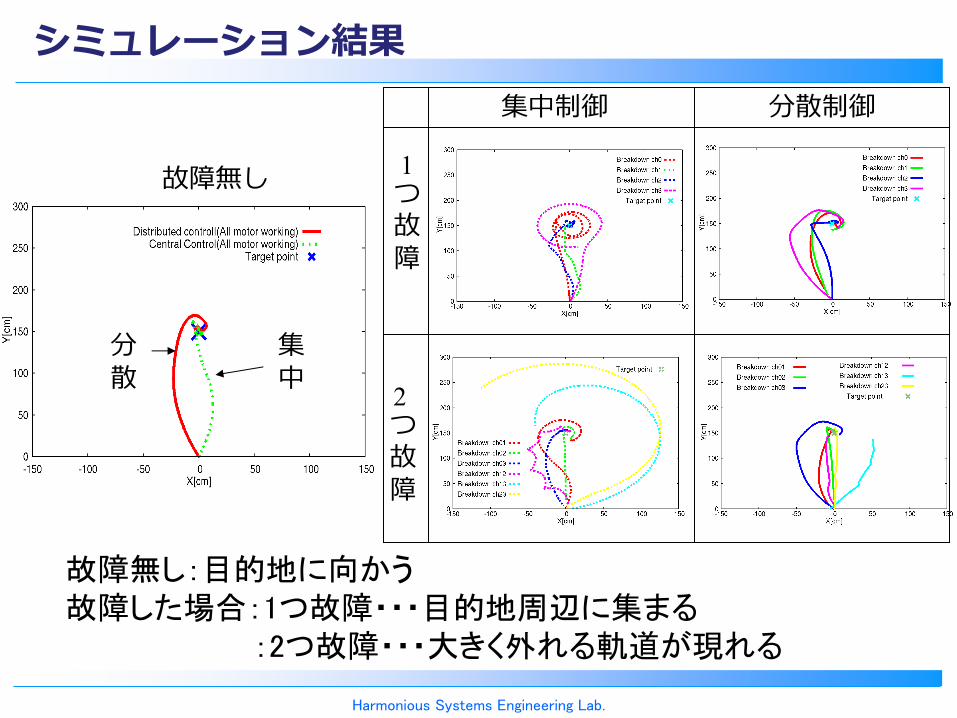
シミュレーション結果
故障無し:目的地に向かう 故障した場合:1つ故障・・・目的地周辺に集まる
:2つ故障・・・大きく外れる軌道が現れる
故障無し
分散
集中
1つ故障
2つ故障
分散制御 集中制御
Harmonious Systems Engineering Lab.
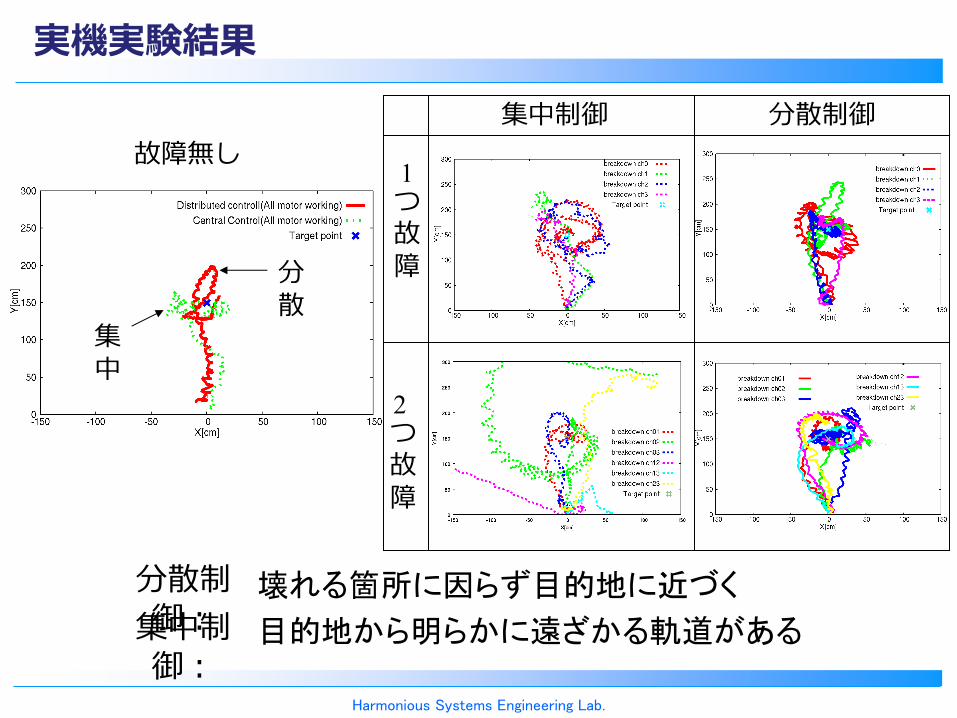
実機実験結果
壊れる箇所に因らず目的地に近づく
目的地から明らかに遠ざかる軌道がある
故障無し
分散
集中
1つ故障
2つ故障
分散制御 集中制御
分散制御: 集中制御:
Harmonious Systems Engineering Lab.
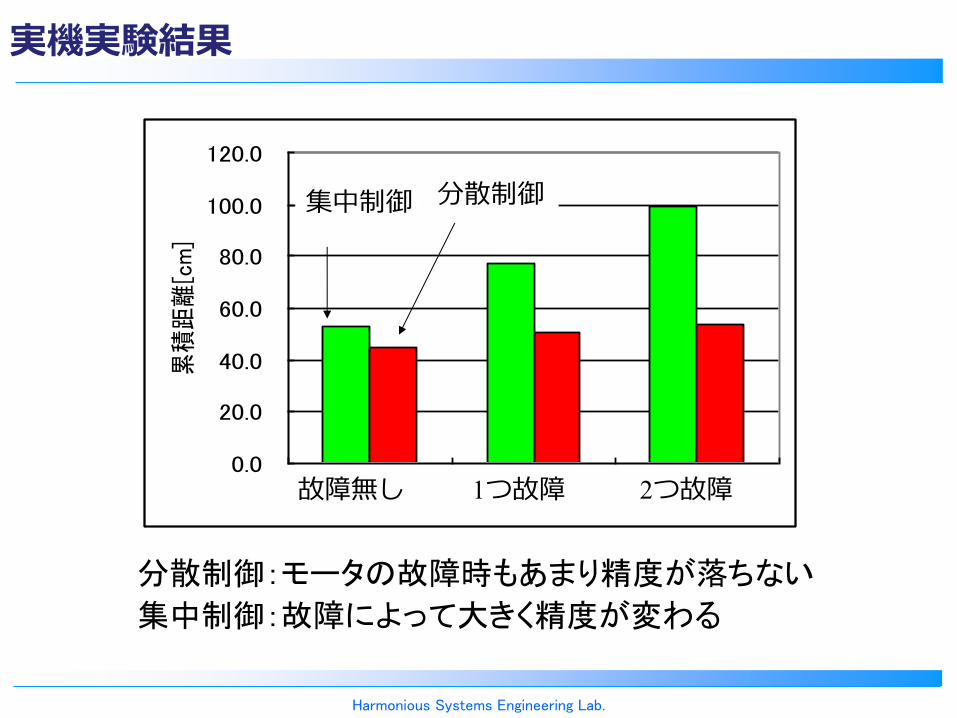
実機実験結果
0.0
20.0
40.0
60.0
80.0
100.0
120.0
1 2 3
累積距離[cm]
故障無し 1つ故障 2つ故障
集中制御 分散制御
分散制御:モータの故障時もあまり精度が落ちない
集中制御:故障によって大きく精度が変わる
Harmonious Systems Engineering Lab.
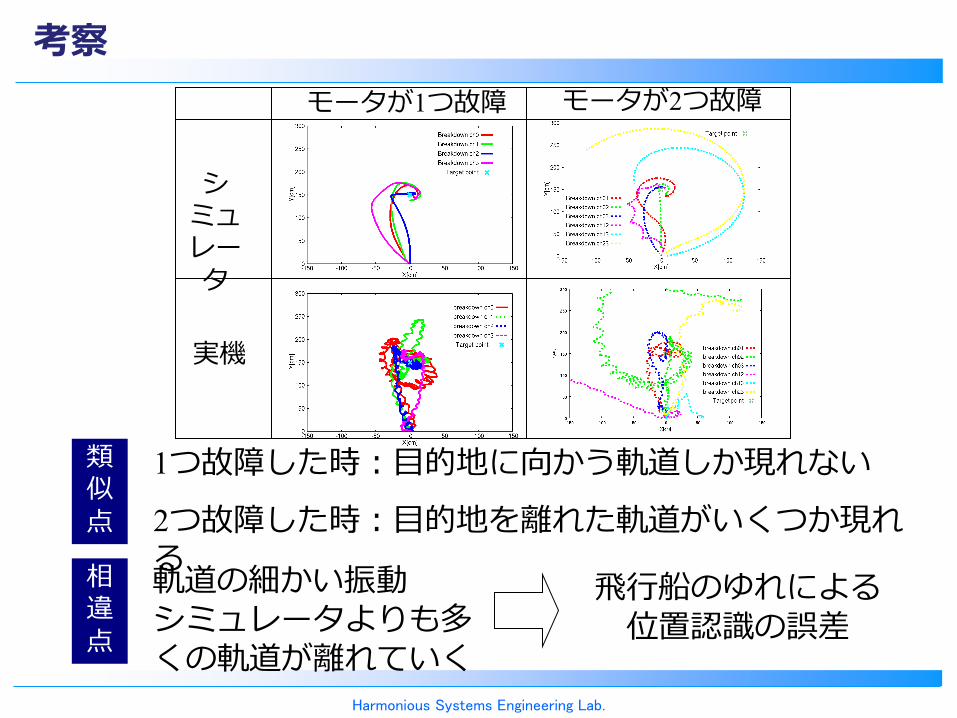
考察
類似点
相違点
シミュレータよりも多くの軌道が離れていく
飛行船のゆれによる位置認識の誤差
シミュレータ
実機
モータが1つ故障 モータが2つ故障
1つ故障した時:目的地に向かう軌道しか現れない
2つ故障した時:目的地を離れた軌道がいくつか現れる 軌道の細かい振動
Harmonious Systems Engineering Lab.
まとめ
動きの変化の要因によらないロバストな制御を実現した
小型屋内自律飛行船に対して分散協調制御の適用可能性を示した
シミュレータの精度向上
業績
”Cooperative control of multiple neural networks for indoor blimp robot “, Ryouta Nishioka, Hidenori Kawamura,
Azuma Ohuchi, Toshihiko Takaya, and Hiroyuki Iizuka ,
The Thirteenth International Symposium on Artificial Life and Robotics 2008
” Vision based control for line following blimp robot,“, Ryouta Nishioka, Hidenori Kawamura, Masahito Yamamoto,
Toshihiko Takaya, and Azuma Ohuchi
The Twelfth International Symposium on Artificial Life and Robotics 2007
”屋内飛行船ロボットのライン追従制御システムの開発”,西岡 良太, 川村 秀憲, 山本 雅人, 高谷 敏彦, 大内
東
ROBMEC 2007 in AKITA





























