Embed Size (px)
Citation preview

PLANNING AND OPTIMIZATION OF CELLULAR
HETEROGENEOUS NETWORKS
A Thesis
Submitted to the Faculty of Graduate Studies and Research
In Partial Fulfillment of the Requirements
For the Degree of
Doctor of Philosophy
in
Electronic Systems Engineering
University of Regina
by
Diego Alberto Castro-Hernandez
Regina, Saskatchewan
December 2016
Copyright 2016: D. A. Castro-Hernandez
UNIVERSITY OF REGINA
FACULTY OF GRADUATE STUDIES AND RESEARCH
SUPERVISORY AND EXAMINING COMMITTEE
Diego Alberto Castro-Hernandez, candidate for the degree of Doctor of Philosophy in Electronic Systems Engineering, has presented a thesis titled, Planning and Optimization of Cellular Heterogeneous Networks, in an oral examination held on October 4, 2016. The following committee members have found the thesis acceptable in form and content, and that the candidate demonstrated satisfactory knowledge of the subject material. External Examiner: *Dr. Anthony Soong, Huawei Technologies
Supervisor: Dr. Raman Paranjape, Electronic Systems Engineering
Committee Member: Dr. Craig Gelowitz, Software Systems Engineering
Committee Member: Dr. Paul Laforge, Electronic Systems Engineering
Committee Member: Dr. David Gerhard, Department of Computer Science
Chair of Defense: Dr. Remus Floricel, Department of Mathematics and Statistics *Via teleconference
Abstract
Over the past few years there has been an dramatic increase in mobile data traffic
demand, a trend that is expected to continue in coming years. Traditional macrocell-
only networks are incapable of providing the quality of service that modern subscribers
expect from a mobile broadband service. Increasing network densification with the
deployment of low power base stations has proven to be an effective solution in this
regard. The resulting multi-tier topology is known as heterogeneous networks or
HetNets. This new topology brings a series of new and important challenges, since
traditional practices applied for macrocell-only networks no longer provide optimal
results. There is a need to increase the understanding about the operation of these
systems and develop new techniques to properly plan, design and optimize HetNets.
These new techniques should focus on the efficient use of resources during network
planning, reducing costs of deployments, and facilitating the configuration and main-
tenance of HetNets. This thesis has focused on exploring novel solutions to challenges
in two main areas regarding the operation of HetNets: planning and self-optimization.
Regarding the planning of HetNets, the thesis starts by treating the issue of im-
proving the accuracy of site-specific path loss prediction models for outdoor microcell
deployments. The prediction of coverage areas based on path loss estimations are
essential for network operators during the planning and design of new deployments.
The thesis proposes two novel tuning algorithms intended to optimize the propagation
model parameters based on information from a limited set of physical measurements.
Also in the area of network planning, it is fundamental for network operators
to understand typical user mobility patterns and accurately estimate the quality of
the service as users move. For this purpose system level simulations are typically
carried out. This thesis proposes a downlink system level simulator that incorporates
ii

a mobility model as well as a traffic model where users are categorized according to
their type of demand. We were able to demonstrate that an appropriate traffic model
can significantly increase the accuracy in the estimation of the the user experience.
Regarding the self-optimization of HetNets, the thesis treats two key challenges:
load balancing and the optimization of handover parameters. Proper load balanc-
ing among base stations is fundamental in order to leverage the benefits in network
capacity that HetNets can provide. In this thesis a novel and practical load balanc-
ing algorithm is proposed. With this algorithm, each base station can solve locally
a load-aware utility maximization problem. As opposed to current approaches, the
algorithm minimizes the required level of coordination among base stations, hence
reducing the impact on the signaling load of the network and potentially reducing
the effect on power consumption.
Finally, the thesis proposes a novel methodology to optimize handover parameters
for in-building systems. The goal of the methodology is to minimize handover failures
and the triggering of unnecessary handovers, while maximizing the quality of service
provided to users approaching the cell-edge. With this methodology, a base station
can customize the handover parameters according to the current load level and the
specific radio frequency conditions of the cell-edge that a user will experience as it
moves out of the service area.
With the research work described in this thesis, we have expanded the understand-
ing about the operation of HetNets. The algorithms and methodologies proposed in
this thesis have the overall objective of maximizing the benefits that HetNets can
provide through the efficient use and coordination of the resources in every tier.
iii
Acknowledgements
I am truly grateful to my advisor Dr. Raman Paranjape, for his trust, help and
support throughout my years as a graduate student. I thank Dr. Paranjape for his
guidance, not only for providing me with valuable academic advice but also encour-
aging me to become a better professional.
I acknowledge the technical assistance and financial support provided by SaskTel
Inc. In particular, I thank the members of the Wireless Network Support team,
particularly Marc Ell, Peter Dang and Edward Steward. I am very grateful to Ed for
providing his time and dedication to assist with the collection and post-processing of
experimental data.
I thank the Faculty of Graduate Studies and Research as well as the University
of Regina for providing financial support through research awards, scholarships and
assistantships.
I thank my fellow graduate students that were part of this journey at one point
or another, in particular Zhanle Wang, Maryam Alizadeh and Sean Cau.
I am deeply grateful to Lena for her love, patience and support during the ups
and downs of the life as graduate student.
Last but not least, it is hard for me to find the words to express my gratitude to
my parents, what I am today is due to their hard work and love. It has been hard
to be far away from them during these years, but I am deeply grateful as they have
been there for me every step of the way. I thank my siblings Kattia and Luis for their
constant support and encouragement from the very beginning of this journey.
iv
Post Defense Acknowledgement
Special thanks to the members of my Ph.D. committee: Dr. Paul Laforge, Dr. Craig
Gelowitz, Dr. David Gerhard and the external examiner of this thesis Dr. Anthony
Soong. The quality of this research work has greatly benefited from their valuable
advise.
v

Dedication
To Myriam and Eliecer,
my loving parents
vi
Table of Contents
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Post Defense Acknowledgement . . . . . . . . . . . . . . . . . . . . . . . v
Dedication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
List of Abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
Chapter 1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Heterogeneous networks . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Challenges in HetNets . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Planning and design of outdoor HetNets . . . . . . . . . . . . 51.2.2 Assessment of quality of service during network planning . . . 71.2.3 Cell association and load balancing . . . . . . . . . . . . . . . 91.2.4 Self-optimizing networks . . . . . . . . . . . . . . . . . . . . . 11
1.3 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.4 Organization of the thesis . . . . . . . . . . . . . . . . . . . . . . . . 18
Chapter 2Local tuning of a site-specific propagation path loss model for
microcell environments . . . . . . . . . . . . . . . . . . . . . 202.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2 Related work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.3 Path loss prediction model . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3.1 Free space propagation . . . . . . . . . . . . . . . . . . . . . . 292.3.2 Over-rooftop and vertical-edge diffractions . . . . . . . . . . . 292.3.3 Reflections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.3.4 Scattering losses due to foliage . . . . . . . . . . . . . . . . . . 312.3.5 Propagation path loss . . . . . . . . . . . . . . . . . . . . . . 322.3.6 Model parameters . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.4 Global, Semi-global and Local tuning . . . . . . . . . . . . . . . . . . 342.4.1 Global tuning based on LSE . . . . . . . . . . . . . . . . . . . 352.4.2 Semi-global tuning . . . . . . . . . . . . . . . . . . . . . . . . 352.4.3 Local tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
vii
2.4.3.1 Practical considerations . . . . . . . . . . . . . . . . 392.5 Gathering of experimental data . . . . . . . . . . . . . . . . . . . . . 402.6 Results & Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.6.1 Evaluating the accuracy of the tuned model . . . . . . . . . . 422.6.2 Distribution of the prediction error . . . . . . . . . . . . . . . 462.6.3 Influence of the size of the training set . . . . . . . . . . . . . 47
2.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Chapter 3Walk/Speed test simulator for cellular network planning . . . . . . 503.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.2 Related work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533.3 LTE/LTE-A Downlink Simulator . . . . . . . . . . . . . . . . . . . . 55
3.3.1 Overview of the simulator . . . . . . . . . . . . . . . . . . . . 563.3.2 Propagation path loss predictions . . . . . . . . . . . . . . . . 583.3.3 Spatial Distribution of mobile users . . . . . . . . . . . . . . . 593.3.4 Mobility models . . . . . . . . . . . . . . . . . . . . . . . . . . 593.3.5 Traffic models . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.3.6 Scheduler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 613.3.7 Mobility Management . . . . . . . . . . . . . . . . . . . . . . 633.3.8 Updating state of UEs after each TTI . . . . . . . . . . . . . . 64
3.4 Collection of experimental data . . . . . . . . . . . . . . . . . . . . . 643.5 Results & Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.5.1 RSRP and SINR estimations . . . . . . . . . . . . . . . . . . . 673.5.2 Downlink data rate . . . . . . . . . . . . . . . . . . . . . . . . 67
3.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Chapter 4A Distributed Load Balancing Algorithm for Heterogeneous Net-
works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 724.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.2 Related work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.3 System model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.3.1 Load of eNBs . . . . . . . . . . . . . . . . . . . . . . . . . . . 804.4 Problem formulation and description of load balancing algorithms . . 81
4.4.1 Load balancing algorithm based on local optimization (LOM) 824.4.2 Algorithm based on the Subgradient Method (SGM) . . . . . 854.4.3 Algorithm based on Dual Coordinate Descend (DCD) . . . . 87
4.5 Performance evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . 884.5.1 Distribution of users . . . . . . . . . . . . . . . . . . . . . . . 894.5.2 Distribution of the load among eNBs . . . . . . . . . . . . . . 904.5.3 Cumulative distribution of the normalized long-term rate . . . 914.5.4 Evaluation of the practicality of the algorithms . . . . . . . . 92
4.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
viii
Chapter 5Classification of user trajectories in HetNets using unsupervised-
shapelets and multi-resolution wavelet decomposition . . 955.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.1.1 Cell-edge characterization . . . . . . . . . . . . . . . . . . . . 975.1.2 Mobility robustness optimization in SON . . . . . . . . . . . . 985.1.3 Load balancing optimization . . . . . . . . . . . . . . . . . . . 98
5.2 Related work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 995.3 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.4 Handovers and RSRP measurement reports in LTE/LTE-A systems . 1015.5 Clustering of time series . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.5.1 Shapelets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1055.5.2 Generating unsupervised-shapelets . . . . . . . . . . . . . . . 1065.5.3 Clustering using unsupervised-shapelets . . . . . . . . . . . . 1085.5.4 Wavelets and multi-resolution analysis . . . . . . . . . . . . . 1095.5.5 Clustering of time series with multi-resolution analysis and
shapelets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1115.5.6 Automatic determination of the number of clusters . . . . . . 113
5.6 Performance evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . 1175.6.1 Evaluation procedure . . . . . . . . . . . . . . . . . . . . . . . 119
5.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Chapter 6Optimization of handover parameters for in-building systems . . . 1276.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1276.2 Related work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1296.3 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1326.4 Handover procedure in LTE/LTE-A . . . . . . . . . . . . . . . . . . . 1336.5 Description of the methodology . . . . . . . . . . . . . . . . . . . . . 136
6.5.1 Collection of measurement reports . . . . . . . . . . . . . . . . 1396.5.2 Clustering of time series . . . . . . . . . . . . . . . . . . . . . 1406.5.3 Optimization of handover parameters . . . . . . . . . . . . . . 140
6.5.3.1 Formulation of the optimization problem . . . . . . . 1416.5.4 Calculation of performance indicators . . . . . . . . . . . . . . 1436.5.5 Solving the optimization problem . . . . . . . . . . . . . . . . 1466.5.6 Matching of time series . . . . . . . . . . . . . . . . . . . . . . 147
6.6 Experimental setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1486.7 Performance evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . 149
6.7.1 Clustering algorithm . . . . . . . . . . . . . . . . . . . . . . . 1506.7.2 HO optimization . . . . . . . . . . . . . . . . . . . . . . . . . 151
6.7.2.1 Data rate gains . . . . . . . . . . . . . . . . . . . . . 1556.7.3 Matching algorithm . . . . . . . . . . . . . . . . . . . . . . . . 157
6.8 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
ix

Chapter 7Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1617.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1617.2 Future research directions . . . . . . . . . . . . . . . . . . . . . . . . 166
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
Appendix ASystem level simulator . . . . . . . . . . . . . . . . . . . . . . . . . . . 183A.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183A.2 Overview of the simulator . . . . . . . . . . . . . . . . . . . . . . . . 183A.3 Software parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 183A.4 Model of the physical environment . . . . . . . . . . . . . . . . . . . 185A.5 Network layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186A.6 Path losses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187A.7 Link abstraction model . . . . . . . . . . . . . . . . . . . . . . . . . . 188A.8 Simulation of TTIs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
A.8.1 Scheduler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189A.8.2 Updating state of UEs after each TTI . . . . . . . . . . . . . . 190
A.9 Throughput calculation . . . . . . . . . . . . . . . . . . . . . . . . . . 191
Appendix BLoad balancing and adaptive adjustment of the REB . . . . . . . . 192B.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192B.2 Adaptive bias adjustment . . . . . . . . . . . . . . . . . . . . . . . . 192B.3 Performance evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . 194
B.3.1 Distribution of users . . . . . . . . . . . . . . . . . . . . . . . 196B.3.2 Fairness of load balancing . . . . . . . . . . . . . . . . . . . . 197B.3.3 Data rate gain evaluation . . . . . . . . . . . . . . . . . . . . 198
B.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
x
List of Tables1.1 Types of small cells based on transmission power . . . . . . . . . . . 3
2.1 Selected test locations for test transmitter . . . . . . . . . . . . . . . 402.2 Overall mean error and mean absolute error, in dB . . . . . . . . . . 43
3.1 Example of traffic categories according to QoS requirements . . . . . 613.2 Example of scheduling probabilities, percentage of users and expected
data rates for each traffic category . . . . . . . . . . . . . . . . . . . . 633.3 Mean error and mean absolute error of RSRP and SINR estimations.
Standard deviation is shown between brackets, all units in dBm . . . 683.4 Mean error and mean absolute error of data rate estimations. Standard
deviation is shown between brackets, all units in Mbps . . . . . . . . 71
5.1 Calculation of Rand index . . . . . . . . . . . . . . . . . . . . . . . . 1125.2 Simulation parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 1185.3 Accuracy of the selected number of clusters . . . . . . . . . . . . . . . 123
6.1 Parameters for evaluation procedure . . . . . . . . . . . . . . . . . . . 1506.2 Number of connected users for each cell for different loading scenarios 1526.3 Operating points used as reference . . . . . . . . . . . . . . . . . . . 156
A.1 Base station parameters . . . . . . . . . . . . . . . . . . . . . . . . . 184A.2 Network parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 185A.3 Simulation parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 186A.4 Downlink SINR-to-CQI mapping for 10% BLER . . . . . . . . . . . . 189
B.1 Simulation parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 196B.2 Fairness indexes of demanded and offered load . . . . . . . . . . . . . 197
xi

List of Figures2.1 Distances and angles used to compute the Uniform Theory of Diffrac-
tion (UTD) diffraction coefficient due to a diffraction point Q at thetop of a half plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2 Multiple half planes used to model buildings obstructing radial linebetween point P and observation point S . . . . . . . . . . . . . . . . 28
2.3 Layout of buildings at the University of Regina main campus. Thefive locations of the test transmitter are indicated in the map . . . . . 41
2.4 Mean absolute error of path loss estimations according to the tuningmethod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.5 Mean absolute error per location of the transmitter for different tuningmethods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.6 Example of path loss values for location #1 of the test transmitter.Measured path loss values as well as the corresponding untuned andtuned estimations are presented . . . . . . . . . . . . . . . . . . . . . 45
2.7 Cumulative distribution function of the prediction error . . . . . . . 462.8 Probability distribution function of the prediction error . . . . . . . . 472.9 Cumulative distribution function of the mean absolute error . . . . . 472.10 Reduction of the mean absolute error (MAE) for each tuning method
vs percentage of measurements points used for tuning . . . . . . . . . 48
3.1 Block diagram of the simulator . . . . . . . . . . . . . . . . . . . . . 563.2 Sectors of the macrocell covering campus as well as example of trajec-
tory followed during the walk tests . . . . . . . . . . . . . . . . . . . 653.3 Example of the RSRP measured and estimated for scenario 3 . . . . . 683.4 Example of the SINR measured and estimated for scenario 3 . . . . . 683.5 Downlink data rate for scenario 1, experimental and simulated results 693.6 Downlink data rate for scenario 2, experimental and simulated results 703.7 Downlink data rate for scenario 3, experimental and simulated results 70
4.1 Traffic map and location of base stations . . . . . . . . . . . . . . . . 894.2 Distribution of users between macrocell and microcell layers . . . . . 904.3 Fairness index of the demanded load . . . . . . . . . . . . . . . . . . 914.4 Cumulative distribution of the normalized long-term rate . . . . . . . 924.5 Average number of exchanged messages according to the load balanc-
ing algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
5.1 Example of the plot of the normalized SSE(k), the actual number ofclusters was 4. The red lines indicate the value of γ used in (5.11) toautomatically select the number of clusters . . . . . . . . . . . . . . 115
5.2 Example of a plot of f (k), the data can be clustered in 2, 4 or 7 clusters 1165.3 Indoor RSRP estimations . . . . . . . . . . . . . . . . . . . . . . . . 119
xii

5.4 Example of manually defined UE trajectory . . . . . . . . . . . . . . 1205.5 Example of the classification of users for A2 = -65 dBm . . . . . . . . 1215.6 Rand index obtained with SW and DFT algorithms for multiple values
of the A2 threshold . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1225.7 Total average intra-cluster distortion for different levels of randomness
of the user trajectories for scenario (1) . . . . . . . . . . . . . . . . . 1255.8 Total average intra-cluster distortion for different levels of randomness
of the user trajectories for scenario (2) . . . . . . . . . . . . . . . . . 1255.9 Average intra-cluster distortion per scenario . . . . . . . . . . . . . . 125
6.1 Block diagram of the proposed methodology . . . . . . . . . . . . . . 1366.2 Example of measured and estimated values of RSRP from the in-
building system and outdoor macrocell. At time t0 the user was handedover to the macrocell. The red rectangle indicates the HO observationwindow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
6.3 Output of the clustering algorithm for measurements taken in buildingB. The time series in each cluster are shown in each graph (blue, black,green and red), the rest of the time series are shown in gray color inthe background. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
6.4 Example of PIs for one of the clusters in building A, under loadingconditions of scenario 1. . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.5 Example of the values of the objective function for one of the clustersin building A, under the loading conditions defined in table 6.2 . . . . 155
6.6 Average achievable data rate gain for different loading scenarios andthree different reference OPs, considering both buildings . . . . . . . 157
6.7 Overall average gain in the achievable data rate per reference OP . . 1586.8 Accuracy of the matching algorithm vs the time after the triggering
of the A2 event . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
A.1 Block diagram of the simulator . . . . . . . . . . . . . . . . . . . . . 184A.2 Modulation scheme and number of information bits per symbol for
each CQI value [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
B.1 Traffic map and location of base stations . . . . . . . . . . . . . . . . 195B.2 Distribution of users between overloaded and underloaded eNBs . . . 197B.3 CDF of the normalized data rate of offloaded cells . . . . . . . . . . . 198B.4 CDF overall normalized data rate for all eNBs . . . . . . . . . . . . . 199
xiii

List of Abbreviations3GPP Third Generation Partnership Project.
CDF cumulative distribution function.
CQI Channel Quality Indicator.
CRE Cell Range Extension.
DAS distributed antenna systems.
DCD dual coordinate descend method.
DFT Discrete Fourier Transform.
DTW Dynamic Time Warping.
E-UTRA Evolved Universal Terrestrial Radio Access.
eNB base station.
HetNet heterogeneous network.
HO handover.
LOM local optimization method.
LOS line-of-sight.
LSE Least Squares Error.
LTE Long Term Evolution.
LTE-A Long Term Evolution - Advanced.
M2M machine-to-machine.
MAE mean absolute error.
MR measurement report.
MRO Mobility Robustness Optimization.
PCI Physical Cell Identity.
PDF probability distribution function.
xiv

PF proportional Fair.
QoS quality of service.
RB resource block.
REB Range Extension Bias.
RF radio frequency.
RSRP Reference Signal Received Power.
RSRQ Reference Signal Received Quality.
SeNB serving base station.
SGM subgradient method.
SINR signal-to-interference-plus-noise ratio.
SON self-optimizing networks.
SW shapelets and wavelet decomposition.
TTI transmission time interval.
TTT time-to-trigger.
UE user equipment.
UTD Uniform Theory of Diffraction.
VoLTE Voice over LTE.
xv
Chapter 1
Introduction
In today’s society, the access to mobile data services has become a fundamental part
of our daily lives. There is a need for constant connectivity anytime and anywhere. It
is expected that by 2020 there will be approximately 1.5 mobile-connected devices per
capita in the world, this means more than 11 billion devices globally [2]. This massive
proliferation of mobile units is partly being fueled by the development of new and
attractive wearable devices and machine-to-machine (M2M) applications. Nowadays,
there is a large variety of wearables, ranging from smart watches, health and fitness
trackers, smart glasses, navigation and monitoring devices, and even clothing with
integrated smart devices. Furthermore, smart phones and tablets have become high-
end devices with more powerful computing capabilities as well as bigger and better
screens. These improvements have made them the perfect choice to access services
and applications like high definition and 4K video streaming, mobile gaming, mobile
commerce applications, location-based services and augmented reality applications.
The access to these services is possible thanks to the high data rates that modern
mobile networks are capable of providing. Such high data rates are also one of the
main reasons why more users are replacing their fixed broadband services with a
mobile plan, a situation that increases even further the number of mobile subscribers.
All these factors place tremendous pressure on mobile network operators to keep
up with this ever-increasing demand for data services. An eightfold increase in global
mobile data traffic is expected in the next five years, reaching the impressive amount
of 30.6 exabytes on average per month [2]. Therefore, network operators need to
redefine their deployment strategies to quickly and efficiently adapt to this trend,
1
while keeping their capital and operational expenditures under control as well as
taking advantage of new technologies and services to maximize revenue generation.
The challenge for network operators is not an easy one: provide mobile data
services with the highest quality and speed possible, for an increasing number of
subscribers consuming bandwidth-intensive applications. This challenge is further
complicated by the fact that spectrum resources are limited as well as costly. Addi-
tionally, site acquisition for the deployment of traditional tower-mounted macrocells
is becoming increasingly difficult, especially in dense urban areas. Furthermore, with
current wireless technologies, the radio link performance is rapidly approaching the-
oretical limits [3, 4]. For all these reasons, operators have to redefine the topology of
their network and rethink their deployment strategies. In recent years, heterogeneous
networks have emerged as an option to boost the capacity of current systems and
they have attracted significant interest from the research community, standardization
bodies and network operators around the world [5]. In the next section we briefly
introduce the concept of heterogeneous networks.
1.1 Heterogeneous networks
Higher network densification is an option to achieve additional capacity gains without
the need to acquire new spectrum allocations. Such gains can be achieved by smartly
reusing the available spectrum with a deployment strategy that combines small low-
power base stations (known as small cells) overlaid in the service area of high-power
macrocells. The resulting network topology obtained with this mixture of low and
high power base stations is known as heterogeneous networks (HetNets) [5] 1. HetNets
are an excellent option for network operators to improve spectral efficiency per unit
1The term “heterogeneous network” can also refer to a multi-technology network (e.g. UMTSand LTE). In this thesis a HetNet is strictly a network whose base stations transmit with differentpower levels
2

Table 1.1: Types of small cells based on transmission power
Base station Typical transmission power Cell sizeMicrocell 5 W less than 1 KmPicocell 250 mW 100 m - 300 m
Femtocell 10 mW - 200 mW 10 m - 50 m
area in a flexible, scalable and cost effective manner [6].
The deployment of traditional homogeneous networks (macrocell-only) requires
a significant investment of resources, including a very careful planning process and
costly installation procedures. On the other hand, the low power consumption and
the small size factor make the deployment of small cells a convenient and low cost
solution, particularly to provide service to traffic hotspots located indoors (e.g. shop-
ping centres, stadiums, airports). Small cells are typically classified according to their
transmission power in microcells, picocells and femtocells [7]. Their typical transmis-
sion power as well as the size of their coverage area are presented in table 1.1 [8].
Femtocells are also known as home base stations and are user-deployed access
points. Microcells and picocells are operator-deployed, typically combined with dis-
tributed antenna systems (DAS) to provide service to a small area. Microcells can
be installed indoors or outdoors (e.g. on street lights or utility posts). Picocells are
usually deployed indoors.
A typical HetNet can be composed of multiple layers, or tiers, according to the
types of base stations in the network. For example, one layer corresponds to the set
of macrocells, a second layer corresponds to the set of microcells and a third layer to
the set of picocells. Operators can distribute their available spectrum among layers.
In order to maximize the reuse of spectrum resources, operators usually setup their
HetNets so that all base stations in all layers use the same carrier frequency, such
HetNet is known as a co-channel deployment.
3
This new deployment strategy involving HetNets brings many benefits to sub-
scribers and operators but also important challenges, especially regarding the opti-
mization of this multi-layer topology. In the next section we describe these challenges,
which in fact constitute the drivers of the research work described in this thesis.
1.2 Challenges in HetNets
With HetNet deployments, operators are moving from a homogeneous system to
a more diverse topology. The coexistence of multiple base stations with different
transmission powers, typically very close to each other and spatially distributed in
a non-uniform fashion, makes the optimization of inter-layer interactions a difficult
task. For network operators, the challenges associated with HetNets start from the
very process of planning and designing the system. Traditional techniques and prac-
tices applied in the planning of macrocell-only networks might not provide optimal
results for a HetNet. Furthermore, once the system is deployed, operators face the
challenge of optimizing the operation of the network to take advantage of the offload-
ing capabilities of the small cells, such capabilities are an essential factor to achieve
the boost in capacity that motivated the deployment of the HetNet in the first place.
Additionally, as the level of network densification increases, the complexity of the
network increases as well. Higher network densification means more base stations per
unit area. Therefore, setting up cell parameters and providing maintenance to the
system could become a cumbersome task, particularly for a network with potentially
hundreds of small cells.
In this thesis, we summarize these challenges in four main areas of interest: plan-
ning and design of outdoor HetNets, assessment of quality of service during network
planning, cell association and load balancing in HetNets, and self-optimizing capa-
bilities. We proceed to provide a description of the research challenges in each one
4

of these four areas. This description consists of an introduction and a brief overview
of the research work carried out in each area. Each chapter in this thesis has been
motivated by one of these areas of interest, we provide a more detailed description of
the state of the art of each area in the corresponding chapter.
1.2.1 Planning and design of outdoor HetNets
Planning and designing a new cell site deployment is a complex process for network
operators. It typically involves the application of specialized simulation tools to
estimate the coverage area of a proposed cell site, a fundamental component of these
tools is a radio frequency (RF) propagation model. With such tools, operators are
able to define and evaluate aspects like the coverage, co-channel interference, base
station placement, frequency allocation, transmission power, antenna selection and
many others, prior to the installation of the system. Most of these aspects are defined
based on estimations provided by the RF propagation model.
In homogeneous networks, tower-mounted macrocells were typically planned and
designed such that the inter-site distance remained relatively constant in the service
area, with all base stations transmitting with approximately the same power. The
design relied mostly on signal strength estimations in outdoor environments. Such
estimations were typically provided by empirical propagation models, like the one
proposed by Okumura and Hata [9]. Such models provide the mean path loss as a
function of the distance between transmitter and receiver based on simple equations
obtained empirically. These models were developed to predict path losses in macro-
cells environments with large coverage areas, in the order of many kilometers [9–11].
However, with the deployment of HetNets mobile network designers are focusing
on the installation of cell sites with small footprints. The accuracy of empirical mod-
els in deployments that involve outdoor small cells is poor, mainly due to the fact that
5

these models only take into account the propagation along the direct path between
transmitter and receiver, ignoring any multipath effect. Furthermore, empirical mod-
els do not consider detailed information about the environment (e.g. topography of
terrain, location and shape of buildings, vegetation). As a consequence, site-specific
models are preferred for this type of deployment due to their higher prediction accu-
racy compared to empirical models. Site-specific models can be based on concepts of
electromagnetic wave theory, geometrical optics or the Uniform Theory of Diffraction
(UTD).
Regardless of the type of site-specific model, prediction errors can still occur
mostly due to uncertainties in the digitized model of the physical environment. Par-
ticularly in outdoor spaces, where detailed information about the electrical properties
of building materials, the actual shape and roughness of walls, location of windows,
and the presence of relevant obstacles (e.g. trees) are usually very difficult to deter-
mine [12].
Prediction errors on path loss estimations can greatly affect the design of a mobile
cellular system by providing poor coverage estimations. This situation can mislead
network operators to place base stations in locations that will not provide the desired
coverage. Therefore, it is common for RF engineers to perform drive and walk tests
using temporary test transmitters to collect measurement data (e.g. received signal
power). Such measurements are then used to assess the coverage during the design
stage of a new deployment.
Given the fact that physical measurements are available from the walk tests, a
logical step is to integrate the information from such measurements in the path loss
estimation model to improve its accuracy. This process is known as tuning of the
model. It essentially adjusts the parameters of the prediction model to the actual
conditions of the physical environment, according to the information from the mea-
sured data.
6
The tuning approaches for site-specific models proposed in the literature are based
on the calculation of a single set of optimal model parameters that are applied ev-
erywhere in the target area [13–23] (i.e. global tuning). Therefore, these tuning
procedures are not able to correct prediction errors caused by localized inaccuracies
in the model of the physical environment. Consider for example a digital represen-
tation of the environment, that assumes that all buildings are box-shaped and all
rooftops are flat, local prediction errors are likely to occur in areas where such as-
sumptions are not valid, and these errors cannot be corrected with a global tuning
approach as it was shown in [24]. Note that a detailed description of these global
tuning procedures is provided in chapter 2.
Therefore, an efficient tuning procedure for site-specific models is required and the
approaches described in the literature do not provide the necessary level of accuracy
for outdoor deployments involving small cells, in particular outdoor microcells. Fur-
thermore, those approaches failed to identify clear and efficient guidelines to assist
operators with the collection of measured data, especially given the fact that walk
tests are tedious and time consuming procedures. Chapter 2 deals with these issues.
The key challenge is to take advantage of a limited set of measured data, gathered at
strategic locations, in order to increase the accuracy of the path loss estimations.
1.2.2 Assessment of quality of service during network plan-ning
Before a new cell site is deployed, network operators evaluate the expected coverage
with the assistance of RF propagation models, as it was described previously. But
also, it is fundamental to evaluate the expected quality of service (QoS) that mobile
users would received prior to the installation of the deployment. System level simula-
tion models are essential tools to predict the behavior of the network, where aspects
like variable loading conditions and user mobility affect the final user experience. In
7
order to reliably estimate user experience in terms of received data rates, realistic
traffic and user mobility models must be part of the system level simulation tool,
since these elements capture the main characteristics of the demand and behavior of
actual users.
From an operator’s perspective, one key factor to consider during network planning
is the understanding of user mobility patterns in the area of interest, and the accurate
estimation of the service experience as users move. It is important for operators to
quantify and comprehend the effects on the user experience of factors like: variable
traffic demand, load levels of the network, resource scheduling, quality of the received
signal and user mobility. Particularly, it is essential to accurately model and simulate
those effects during the planning stage of the network.
Most commercially available network simulation tools provide basic functionalities
to estimate the maximum achievable data rate that a specific user may receive. Such
estimation of the achievable rate is based on factors like: the quality and strength
of the received signal and possibly a traffic map created manually by the network
planner. The traffic map is used to define the spatial distribution of users in the
service area and their expected demand. These simulation tools typically consider all
users in the target area as static users, which corresponds to an over-simplification
of reality. There is a lack of simulation models for Long Term Evolution (LTE) and
Long Term Evolution - Advanced (LTE-A) systems capable of accurately modeling
user mobility and estimating the QoS provided to mobile users. Usually, operators
would need to wait until after the deployment of the system to execute numerous
speed tests to verify the actual user experience in different locations of the service
area.
On the other hand, in many cases the contributions proposed in the research
literature have been assessed assuming a static distribution of users and simplified
traffic models. Some examples are the research works in [25, 26], where analytical
8
models of HetNets are proposed assuming a uniform distribution of users and without
considering any traffic model. In other instances, user demand has been modeled
according to the traditional full buffer model (i.e. all base stations have an infinite
amount of data to deliver to each one of their users) and also assuming users are static
[27–29]. In actual systems, a portion of the users are running bandwidth-intensive
applications, while another portion of the users are performing light browsing and file
transfer activities, and another portion of the traffic could be due to non-user initiated
connections (like automatic update of smartphone “apps”). This segmentation of the
traffic in categories is also subject to change during the day and it is in general not
captured by the full buffer traffic model. The need to develop traffic and mobility
models that emulate the actual behavior of users has been recognized in recent years
by Damnjanovic et al. in [30], Hu et al. in [31] and Galinina et al. in [32].
In Chapter 3, an LTE/LTE-A downlink simulator that incorporates a user mobility
model as well as a realistic traffic model is discussed. The effects of the incorporation
of such models in the accuracy of the simulation tool are analyzed. The proposed
simulation tool can then be applied by network operators to simulate walk tests during
the planning stage of the mobile network.
1.2.3 Cell association and load balancing
HetNets are an excellent option for increasing capacity and decreasing the congestion
levels of macrocells, especially during peak periods. However, careful coordination
between base stations is necessary to achieve a fair distribution of the traffic. User
experience can be significantly affected when receiving service from an overloaded base
station, even in areas with high signal-to-interference-plus-noise ratio (SINR). Current
cell association mechanisms (also known as cell selection schemes), e.g. a user is
served by the base station that provides the strongest received signal or SINR, tend to
9
ignore a critical aspect: the load of the base stations [33]. These mechanisms provide
suboptimal cell associations in HetNets resulting in unbalanced load distributions,
leading to congestion in some cells and under-utilization in others. Sharing the load
among base stations (small cells and macrocells), can greatly improve the overall
network throughput.
In recent releases of the Third Generation Partnership Project (3GPP) standard
[34], a mechanism known as Range Extension Bias (REB) was introduced. The REB is
also known as Cell Range Extension (CRE). The REB is used to artificially increase
the received power from small cells in order to encourage mobile users to select a
small cell as their serving base station, instead of the high-power macrocell (i.e. the
mobile unit adds the bias to the received signal strength of a pilot/reference signal
transmitted by any small cell). Additional capacity gains can be achieved with this
method, as it is shown in [35], at the expense of higher interference levels for users
in the artificially expanded range area (i.e. users associated with the small cell only
due to the bias). One key aspect about the effectiveness of the REB is the fact that
the value of the bias has to be optimized at the cell level. This is needed in order
to reach a balance in this trade-off between degradation of performance at the cell
edge and balancing of the load among layers in HetNets. The overall objective of a
cell association or a load balancing approach in HetNets is to provide a uniform user
experience regardless of whether the user is at the cell-edge or in the middle of the
service area of any base station in the system.
The use of REB to dynamically control the coverage areas of small cells has been
extensively studied in recent years [36–41]. Unfortunately, the optimal values of REB
are typically calculated based on network-wide analysis, with bias values specified
in a per-tier basis using centralized algorithms with slow adaptation. Furthermore,
these approaches tend ignore the degradation of the quality of service provided to
users in the range extended area, since those mobiles are subject to higher levels of
10
interference. Hence, increasing the bias to encourage a higher balance of the load
does not necessarily lead to better service for cell-edge users.
On the other hand, authors in [27, 28] have proposed approaching the load bal-
ancing issue as a convex optimization problem that can be solved in a distributed
fashion. A utility function is formulated, typically in terms of the achievable data
rate of the users. Then, the optimal cell association that maximizes the network-wide
sum of the utility is found. Unique user association, power control and load sharing
are constraints included in the optimization problem. Approximating the optimal
network-wide user association usually involves the implementation of complex itera-
tive algorithms, which require significant coordination between sites and a substantial
exchange of signaling messages between base stations and users. These approaches
are able to achieve significantly higher gains in throughput for cell-edge users com-
pared to the REB-based approaches at the expense of a higher number of triggered
handovers and a higher level of coordination among base stations. A more detailed
description of all these studies is provided in chapter 4.
Load balancing in HetNets is still an open issue, practical algorithms capable
of reaching acceptable performance gains while keeping overhead costs and energy
consumption at a minimum level are needed. This issue is treated in Chapter 4, where
a practical load balancing algorithm is proposed and its performance is compared with
two near-optimal iterative algorithms proposed in [27] and [28].
1.2.4 Self-optimizing networks
HetNet deployments are becoming the preferred choice of network operators to in-
crease capacity and enhance the quality of service provided to mobile users. As a
result, the number of small cells will increase dramatically in future years, and this
will lead to more complex mobile networks. Therefore, setting up cell parameters
11
during the deployment of a new site or providing maintenance to existing ones are
becoming challenging tasks for network operators. In recent years, there have been
significant efforts to provide base stations with self-optimizing capabilities, in partic-
ular in the context of 3GPP LTE/LTE-A HetNets. The main objective has been to
convert base stations into “plug & play” devices, so that the cost of their deployment
is minimized [42]. With self-optimizing networks (SON) functionalities, the base sta-
tions can potentially detect a problem and automatically adjust their operational
parameters to solve the issue with minimal human intervention.
Several SON features have been included in the 3GPP LTE/LTE-A standard
[34]. Some of the most basic features are Self-configuration and Automatic Neighbor
Relations, these functionalities have greatly simplified the process of configuring a
new cell site.
With the Self-configuration feature, the initial configuration of the operational
parameters of a new site can be executed automatically. One of the most important
parameters that needs to be configured during this stage is the Physical Cell Identity
(PCI). This is carried out with a feature also known as Automatic Cell Identity
Management. Operators need to assign a unique PCI to each cell, so that users
can unambiguously identify and access the base station. The assignment of the PCI
should be unique in the area covered by the base station (to ensure a collision-free
operation) and no cell should have two or more neighbors with identical PCI (to
ensure confusion-free operation). A total of 504 different values of PCI are allowed
for use, hence PCI is indeed a finite resource [43]. The automatic assignment of the
PCI is usually carried out by a centralized entity at the Operations and Management
(OAM) infrastructure of the network. Such entity is also in charge of re-assigning
a cell identity in case a PCI confusion/collision is reported by any of the cells [42].
Other parameters, for example transmission power, also need to be configured after
the deployment of a new site.
12
On the other hand, the Automatic Neighbor Relations feature provides automatic
management of neighbor cell relations, including automatic discovery of new neigh-
boring cells. When a new site is switched on, it needs to know about the existence
of neighboring cells in order to perform handover operations. The new base station
builds the list of neighbor relations based on the measurement reports submitted by
users as they move in a region where there is an overlap between coverage areas. This
means that the new base station is able to discover its neighbors based on the infor-
mation provided by its connected users. With higher level of network densification,
it would cumbersome for operators to manually maintain and update these lists for
every cell in their network [42,44,45].
Other SON features like Self-healing and Minimization of Drive Tests have also
been discussed in the standard [42]. One of the most relevant SON features in the
context of HetNets is the Mobility Robustness Optimization (MRO). With MRO,
base stations are capable of adjusting the parameters that control the execution of
handovers automatically. Such adjustment is carried out in order to minimize mobility
failure rates and avoid the triggering of unnecessary handovers (ping-pong events).
The optimization of handover parameters in HetNets is a complex task, particularly
in systems involving picocells deployed indoors (also known as “in-building” systems).
In this thesis, we concentrate on the MRO feature for this type of deployments.
Two main factors make the optimization of handover parameters a challenging
issue in in-building systems: irregular cell-edge conditions and dynamic variation of
the load. The irregularity of the RF conditions at the cell-edge of in-building systems
(e.g. received signal and interference levels), is basically due to the uneven levels of
interference caused by the outdoor macrocell [46]. In certain situations, it may be
preferred to execute a handover as early as possible, due to a rapid degradation of
the received signal as users of the in-building system approach the cell-edge. In other
situations, it may be preferred to delay the execution of the handover to avoid un-
13

necessary triggering of handovers. Currently, most network operators define a unique
set of handover parameters for the entire in-building system. However, such unique
set of parameters could be too aggressive in some cases or too conservative in others.
Additionally, the optimization of handover parameters becomes more complicated if
we also consider the second factor: the load. Commonly, due to their large foot-
print, macrocells tend to handle a large number of users, in some cases even reaching
congestion. Therefore, in such scenario, it would be advantageous for the base sta-
tion of the in-building system to delay the execution of the handover. This would
keep the quality of service provided to cell-edge users at an acceptable level before
handing them over to the macrocell. Hence, the RF conditions of the cell-edge (e.g.
signal strength, interference level) and the loading conditions of the cells determine
the proper set of handover parameters for optimal operation.
One of the most popular MRO algorithms was the one proposed by Jansen et al.
in [47]. The approach consists of the selection of suitable handover parameters based
on the continuous monitoring of specific performance indicators (e.g. handover failure
ratio and the ping-pong event ratio). If any of the performance indicators exceeds
certain predefined threshold, the base station incrementally modifies the handover
parameters until the performance indicator reaches an acceptable level. This approach
has a slow response to changes, since it requires the collection of a large number of
handover statistics to trigger the modification of the handover parameters [48]. For
example, a number of handover failures must occur before the algorithm adjust the
parameters. In [48–52] the authors have proposed similar handover optimization
strategies. These approaches propose the application of a single set of parameters for
each cell, hence they do not provide optimal results in HetNets.
In recent years, other authors have proposed to adapt the handover parameters to
specific cell-edge conditions in HetNets [46, 53–55]. For example, in [46], the authors
proposed to let the serving base station determine the appropriate moment to request
14
a handover based on the reported values of Channel Quality Indicator (CQI) as users
approach the cell edge. As opposed to triggering the handovers based on a unique
value of a received signal strength threshold. In [53], the authors propose to use
different sets of handover parameters based on the type of base station in a HetNet (i.e.
different parameters on a per-tier basis). In [54], the authors propose to customize
handover parameters based on user behavior, in particular their type of demand. A
more detailed description of these approaches is provided in chapter 6.
The current tendency is then to develop algorithms to implement “smarter” base
stations, capable of autonomously recognizing and identifying the optimal set of han-
dover parameters according to their very specific cell-edge conditions, even at the
user-level. In chapters 5 and 6 we deal with this issue, where a novel handover opti-
mization methodology is proposed for in-building systems.
1.3 Contributions
The research work described in this thesis has the main objective of expanding the
understanding and exploring solutions for specific challenges that the mobile net-
work industry faces in the process of planning, designing, deploying and optimizing
LTE/LTE-A heterogeneous networks. Each one of the challenges identified in the
previous section has served as the main motivation behind each contribution of this
thesis. Below, we proceed to summarize the contributions provided by the research
work presented in this thesis.
1. Efficient integration of measured data into the estimation of RF prop-
agation losses for outdoor microcell deployments. In Chapter 2, novel
local and semi-global tuning methods for a site-specific propagation path loss
model based on the UTD are proposed. The purpose of these novel tuning
methods is to efficiently incorporate measured data in the prediction process
15

at a local scale, and consequently multiple sets of values for the model param-
eters are calculated. As opposed to the current tuning methods described in
the literature, where measured data is used to calculated a single set of model
parameters and such parameters are applied to the entire area of interest. We
demonstrate that our tuning methods are capable of increasing the accuracy of
path loss estimations in a realistic physical scenario.
2. Walk/speed test modeling and simulation. In Chapter 3, we describe
an LTE/LTE-A downlink simulator capable of modeling the walk/speed tests
carried out by network operators during the planning stage of a new cell site.
The simulation tool incorporates a realistic traffic model based on QoS require-
ments, such requirements are defined according to the type of traffic that a
specific user demands. With this simulation tool, we quantify the effects of the
traffic model on the accuracy of the data rate estimations. The simulator was
validated with measurement data collected from a live LTE network, with em-
phasis on cell-edge regions (i.e. places where users are handed over to another
cell). This is due to the fact that at the cell-edge the QoS tend to degrade, and
it is fundamental for a new deployment to guarantee acceptable QoS and con-
tinuity of service in such areas. We were able to show a superior performance
in the modeling of the walk/speed tests when our traffic model was applied as
opposed to the traditional full buffer model.
3. Load balancing between small cells and macrocells in HetNets. In
Chapter 4, a novel and practical distributed load balancing algorithm is pro-
posed. Given a suboptimal user association scheme, each base station can solve
locally a load-aware utility maximization problem. Such problem is solved based
on the information of the current load level of the base station (eNB), resource
scheduling and SINR conditions of its associated users. By solving the utility
16
maximization problem locally, an overloaded base station can determine which
users are negatively impacting its sum of the utility, those users are then candi-
dates to be transferred to other base stations with spare capacity via load-aware
handover procedures. The algorithm was formulated with the objective of re-
ducing the required amount of coordination and exchange of information among
base stations (e.g. handover triggering), because an excessive exchange of sig-
naling messages is undesired and leads to an increase in power consumption.
This is a factor that has usually been overlooked in past studies. Our evaluation
of the algorithm shows a superior performance in terms of practicality due to a
low level of coordination and exchange of information among base stations com-
pared to near optimal iterative algorithms proposed previously [27, 28], while
providing significant data rate gains and a fair distribution of the load.
4. Autonomous discovery of cell-edge conditions for in-building systems.
In Chapter 5, we propose a novel methodology intended to provide the means to
make base stations of in-building systems smarter and capable of learning and
identifying the RF conditions that their users are subject to as they approach
the cell-edge, without actually knowing the physical location of the mobiles. For
this purpose, we propose the use of machine learning and data mining techniques
to identify characteristic patterns in the received signal strength measurement
reports submitted by users as part of the handover process in LTE systems.
Such measurement reports are treated as time series (an idea introduced by
Sas et al. in [55]). Our methodology is based on a novel time series clustering
algorithm based on shape similarity to identify and classify the characteristic
patterns captured in the reported measurements. We propose to apply a shape-
based technique called unsupervised-shapelets combined with a multi-resolution
wavelet decomposition analysis.
17
5. Optimization of handover parameters for in-building systems. In
Chapter 6 we propose a novel methodology to optimize handover parameters
for in-building systems. The objective of this methodology is to reduce han-
dover failures and the triggering of unnecessary handovers, and maximize the
QoS provided to users approaching the cell-edge. Our intention in this chapter
is to explore the development of a methodology that would allow base stations
to customize handover parameters at the user level in order to provide an op-
timal service. The key insight behind this methodology is the adjustment of
handover parameters based on the knowledge that base stations are able to
acquire regarding the RF conditions of their cell-edge. Such knowledge is ob-
tained through the application of the clustering algorithm described in chapter
5. Additionally, our methodology can also be considered as a load balancing
approach for users in “connected mode” (i.e. users actively exchanging data
with the base station). This is due to the fact that the optimization strategy
not only takes into consideration the levels of interference at the cell-edge but
also the loading conditions of the serving and target cell. The handover param-
eters are then adjusted accordingly in order to provide the highest quality of
service possible. To the best of our knowledge, a similar methodology for the
optimization of handover parameters has not been proposed in the literature.
1.4 Organization of the thesis
The contributions of this thesis are described in Chapter 2 through Chapter 6.
In Chapter 2 the tuning of site-specific path loss propagation models is described.
Chapter 3 provides a description of our system level simulator that includes a mo-
bility and traffic model, this tool can be considered as a walk/speed test simulator.
In Chapter 4 we discuss the load balancing issue in HetNets and provide the details
18
and evaluation of our proposed algorithm. Our methodology to provide base stations
of in-building systems with a mean to autonomously discover their cell-edge condi-
tions is described in Chapter 5. In Chapter 6, we describe our methodology to
optimize handover parameters for in-building systems. Finally, the thesis concludes
with an overall summary and a description of future research directions in Chapter
7.
Some of the chapters in this thesis contain sections quoted verbatim from five
publications by the author [24, 56–59]. Chapter 2 is based on the publications in
[24,56]. Chapter 3 is based on reference [59]. Chapter 4 is based on the publications
in [57,58]. Furthermore, chapters 5 and 6 are based on the manuscripts in [60] and [61]
respectively, these manuscripts are currently under review. All these publications and
manuscripts where co-authored with Dr. Raman Paranjape (second author).
Additionally, some portions of these papers have also been incorporated into this
introductory chapter.
19
Chapter 2
Local tuning of a site-specificpropagation path loss model for
microcell environments
New local and semi-global tuning methods for a 3D site-specific propagation path
loss model based on the UTD are proposed in this chapter. The purpose of the
tuning methods is to efficiently incorporate measured data in the prediction process to
enhance the accuracy of the path loss model in outdoor microcell environments. The
performance of the proposed tuning procedures is compared with a third method that
corresponds to a global tuning approach based on the Least Squares Error technique.
Our results show that the local tuning procedure outperforms any of the other tuning
methods by providing up to 35% reduction of the mean absolute error.
2.1 Introduction
In order to keep up with the exponential growth of the demand for mobile com-
munication services, network operators have been forced to increase the capacity of
their systems. Installation of new and smaller cell sites is a common approach to
increase the capacity of mobile systems like LTE networks. In such process, the use
of RF propagation prediction tools is essential. Propagation models play a vital role
during the design stage of new cell site deployments, several aspects related to the
performance of the network can be predicted based on the estimations provided by
propagation models.
RF propagation models have been extensively studied since the late 60’s. Ini-
20
tially, empirical models were developed to predict path losses in large macrocells
environments with many kilometers of coverage [9–11]. One of the most widely used
empirical models is the one proposed by Okumura and Hata [9]. The general equation
to calculate the path loss LdB is:
LdB = A + B log10 R (2.1)
Where A and B are functions of variables like the height of the transmitter, the
carrier frequency and the type of environment (medium-small city, large city, subur-
ban area, open area, etc.) and R is the distance between transmitter and receiver.
In general, empirical models provide the mean path loss based on simple equations
obtained empirically, like (2.1).
However, nowadays mobile network designers are focusing on the deployment of
smaller cell sites, like microcells, with coverage of a few blocks at most. As it was
stated in Sect. 1.2.1, the accuracy of empirical models in microcell environments is
poor, mostly because empirical models only take into account the propagation along
the direct path between transmitter and receiver. This means that only a single
propagation path is considered to estimate the propagation loss, hence ignoring an
essential phenomena in the propagation of radio frequency signals: the multipath ef-
fect. Furthermore, empirical models do not consider specific and detailed information
about the environment (e.g. topography of terrain, location and shape of buildings,
vegetation). Therefore, more accurate prediction models, e.g. site-specific models,
are more suitable for path loss prediction in small cell sites. These models are also
called deterministic models and are based on concepts of electromagnetic wave theory,
geometrical optics or on the UTD.
Ray tracing models, initially developed in the mid-90s, have become the most
widely used site-specific models nowadays [62,63]. Their popularity is due to the fact
that they can provide reasonably accurate results when sufficiently detailed infor-
21
mation of the physical environment is available. Using such detailed information, a
digital representation of the environment is generated. Electromagnetic wave theory
principles are then applied to predict the propagation losses. Their main disadvantage
is their complexity. They can be computationally expensive when applied to complex
outdoor environments. Significant work has been done in recent years to reduce the
processing times of ray tracing algorithms [64–67], however their implementation is
still cumbersome.
The main advantage of site-specific models is the fact that they provide a direct
modeling of the multipath phenomena occurring between transmitter and receiver
due to the presence of obstacles between them. Unfortunately, prediction errors occur
due to uncertainties in the digitized model of the physical environment, e.g. detailed
information about the electrical properties of building materials, the actual shape
and roughness of walls, location of windows and, the presence of relevant obstacles
like vegetation are usually difficult to determine [12].
Prediction errors on path loss estimations can greatly affect the design of a mobile
cellular system by providing poor coverage estimations. This situation can mislead
network operators to place base stations in locations that will not provide the desired
coverage. Therefore, it is common for RF engineers to perform drive and walk tests to
collect measurement data. Such measurements are then used to assess the coverage
during the design stage of a new deployment.
In this chapter, we investigate an effective procedure to enhance the accuracy of
site-specific path loss estimations by carefully integrating information from measured
data, collected during walk tests, in the prediction model. This process is known
as tuning of the model. It essentially adjusts the prediction model to the actual
conditions of the physical environment based on information from measured data.
Many approaches to tune propagation models have been proposed [13–24]. They
usually consist of the calculation of a unique set of optimal model parameters that
22
minimizes the disagreement between estimations and measurements, then the opti-
mized model is applied all over the entire target area. We consider these approaches
as global tuning procedures. Their main objective is to reduce the overall average
prediction error, even though the tuned model might actually increase the error in
certain areas of the map [24]. They have the disadvantage that such optimal set of
parameters is applied everywhere in the target area. Therefore, these global tuning
procedures are not able to correct prediction errors due to local causes, e.g. localized
mismatches between the digital model of the environment and the actual physical
environment.
In this chapter, we propose two novel tuning procedures for a site-specific path
loss prediction model: a semi-global and a local tuning. The propagation model
considered in this study is similar to the one we proposed in [24], this model consid-
ers four propagation mechanisms: free space, over-rooftop diffractions, vertical-edge
diffractions and single reflections. Our results show that our local tuning procedure
outperformed any of the other tuning methods considered in this study by providing
the lowest mean absolute error for any of our test transmitter locations. Tuning the
model locally provided a significant reduction of the mean absolute error between
measurements and predictions, the average reduction in the error was close to 35%
compared to the mean absolute error obtained with the untuned model.
The chapter is organized as follows: in Section 2.2 we provide a description of the
current tuning procedures for site-specific models. In Section 2.3 we provide details
about the propagation model used in this study. The proposed semi-global as well as
the local tuning procedures are described in Section 2.4. In Section 2.5 we provide
details about our measurement activity. Our results and discussion are presented in
Section 2.6. Finally we provide a summary in Section 2.7.
23

2.2 Related work
Tuning of site-specific models is not a trivial task. Many of these models are based
on theoretical principles. Therefore, to efficiently tune these models it is important
to identify the sources of prediction errors to be corrected by the tuning procedure.
Different tuning approaches have been proposed based on the error source. In [13],
a ray tracing model based on UTD is modified in order to include an adjustable pa-
rameter to account for the fact that the real impedance of walls is usually unknown;
using physical measurements a suitable value for this parameter can be found and
is applied to all the walls in the target area. In [14, 15] a similar prediction model
is tuned by finding an optimal value for the permittivity and conductivity of con-
crete walls. These approaches have the disadvantage that the dependency of UTD
diffraction/reflection coefficient equations on the electrical properties of materials is
non-linear and optimization is difficult; therefore, artificial intelligent techniques are
usually applied to obtain the optimal value of the parameters [15]. Furthermore, the
sensitivity of the models to these parameters is very low [68]; thus, applying compli-
cated algorithms to find optimal values of electrical properties of materials does not
provide significant improvements in the accuracy of the path loss estimations.
Other approaches consist of tuning propagation models to reduce prediction er-
rors caused by assumptions that over-simplify the digital representation of the en-
vironment. In [16–18], models like Bertoni-Walfish and Walfish-Ikegami, have been
modified to include adjustable parameters that account for inaccuracies caused by
simplifications like uniform separation and height of buildings. Those assumptions
usually do not match real conditions in all urban environments where buildings might
have very different shapes, orientations and separation between them. These ap-
proaches find optimal parameters values by applying techniques like Least Squares
Error (LSE) [16,19].
24

In [20–23], a probabilistic approach is proposed to reduce the uncertainty due to
unknown characteristics of obstacles in the environment. In [20–22], authors suggest
the use of random variables to model parameters like the average separation of build-
ings, orientation of roads, width of roads, and average heights of buildings; instead
of assuming a predefined constant value for each of those parameters. The tuning
procedure calculates the parameters of the probability distribution functions of the
random variables such that the prediction error is reduced. Similarly, in [23] a ray
tracing model is tuned by modeling the angle of reflections as a random variable.
This is done in order to account for the fact that the actual roughness of reflecting
surfaces is unknown; therefore the angle of incidence of a ray is not necessarily equal
to the angle of reflection as it is assumed in many models. Simple techniques like
LSE [21, 22] have been applied to find optimal parameters of the distribution func-
tions but more complicated methods like Particle Swarm Optimization (PSO) have
also been applied [20]. The mean error for these tuning methods has been reported
to be close to -2 dB.
The tuning approaches discussed so far are based on the calculation of a single
set of optimal parameters that are applied everywhere in the target area. Therefore,
these global tuning procedures are not able to correct prediction errors due to local
causes as it was mentioned before. Consider for example a digital representation of
the environment, that assumes that all buildings are box-shaped and all rooftops are
flat, local prediction errors are likely to occur in areas where such assumptions are not
valid, and these errors cannot be corrected with a global tuning approach as it was
shown in [24]. Therefore, a local tuning of the model is preferred, where information
from physical measurements is integrated into the prediction model at a local scale
and consequently multiple sets of values for the model parameters are calculated.
In the next section, we provide a description of the site-specific model used in this
study.
25
2.3 Path loss prediction model
The path loss prediction model, used during the design stage of a new cellular de-
ployment, should be selected considering factors like: cell size, type of environment
(rural, urban, suburban), available information about terrain, buildings, roads, trees
and characteristics of the transmitter and receiver antenna. In the case of outdoor mi-
crocells, line-of-sight (LOS) conditions typically do not occur and propagation mech-
anisms like diffractions, reflections and scattering are essential. Furthermore, the
propagation in urban microcells is highly dependent upon the location and orienta-
tion of buildings. Due to these facts, site-specific models are the most suitable option
for this type of environment.
In this study, we applied a site-specific propagation prediction model similar to
the one we proposed in [24]. Our model is based on ray tracing principles and the
classical UTD initially proposed by Kouyoumjian and Pathak in [69].
In a multipath channel, the received signal is a combination of a set of attenuated
and phase shifted replicas (rays) of the transmitted signal. Each one of these rays
reach the receiver after being reflected, diffracted and scattered by different objects
in the environment. Based on UTD principles, the total electric field at the receiver’s
location can be computed as the vector sum of the received electric field of each ray
arriving at the receiver as [62, 70]:
~ERx =
m∑j=1
~E j (2.2)
Where m is the number of rays reaching the receiver and ~E j is the received field
of the jth ray. The amplitude and phase of ~E j depend on the propagation path from
transmitter to receiver followed by the ray. According to UTD, the received field at
an observation point S due to a reflection (or diffraction) occurring at a point Q, is
26
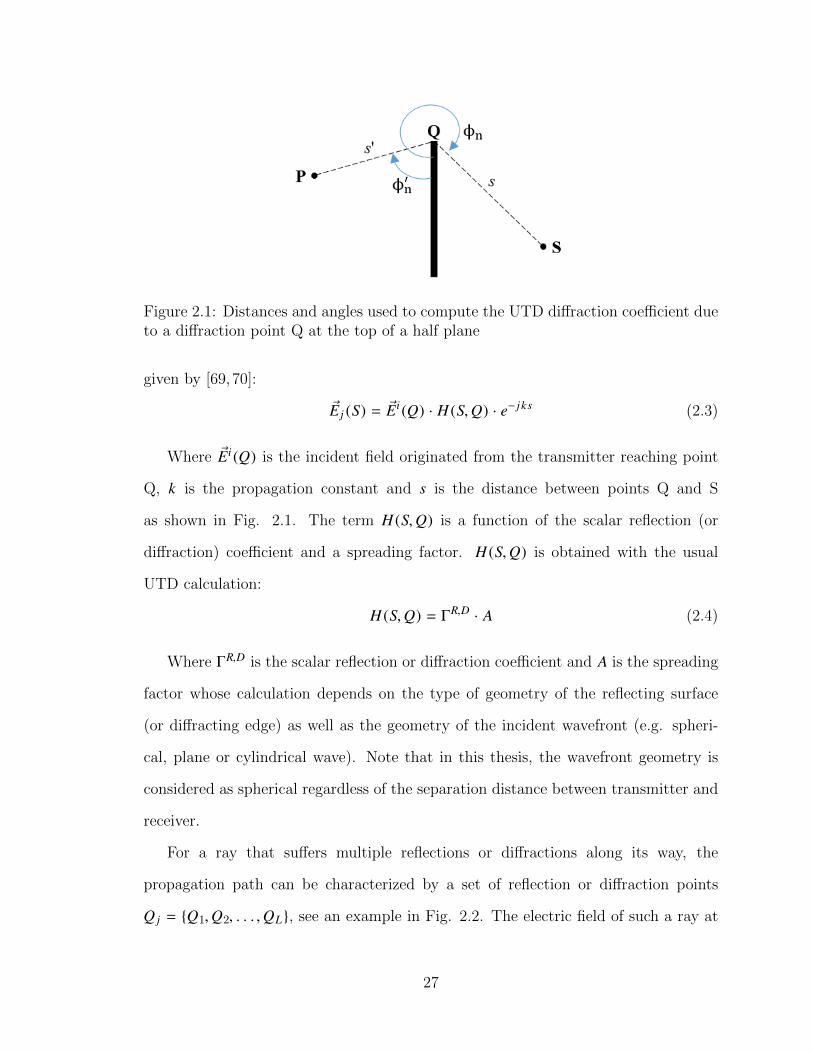
Figure 2.1: Distances and angles used to compute the UTD diffraction coefficient dueto a diffraction point Q at the top of a half plane
given by [69,70]:
~E j (S) = ~Ei (Q) · H (S,Q) · e− j ks (2.3)
Where ~Ei (Q) is the incident field originated from the transmitter reaching point
Q, k is the propagation constant and s is the distance between points Q and S
as shown in Fig. 2.1. The term H (S,Q) is a function of the scalar reflection (or
diffraction) coefficient and a spreading factor. H (S,Q) is obtained with the usual
UTD calculation:
H (S,Q) = ΓR,D · A (2.4)
Where ΓR,D is the scalar reflection or diffraction coefficient and A is the spreading
factor whose calculation depends on the type of geometry of the reflecting surface
(or diffracting edge) as well as the geometry of the incident wavefront (e.g. spheri-
cal, plane or cylindrical wave). Note that in this thesis, the wavefront geometry is
considered as spherical regardless of the separation distance between transmitter and
receiver.
For a ray that suffers multiple reflections or diffractions along its way, the
propagation path can be characterized by a set of reflection or diffraction points
Q j = {Q1,Q2, . . . ,QL}, see an example in Fig. 2.2. The electric field of such a ray at
27

Figure 2.2: Multiple half planes used to model buildings obstructing radial line be-tween point P and observation point S
an observation point S is given by [62,70]:
~E j (S) = ~Ei (Q1)L∏
l=1
ΓlR,D Ale jφ (2.5)
The incident field ~Ei (Q1) is typically calculated assuming LOS from the transmit-
ter location to the point Q1 as:
~Ei (Q1) = ~ET x ·e− j kr
r(2.6)
Where ~ET x is the transmitted electric field at a reference distance of one meter
from the transmitter and r is the distance between such reference distance and point
Q1.
Let W j denote the total field attenuation and phase shift suffered by the trans-
mitted field along the propagation path of the jth ray. Then, from (2.5) and (2.6),
W j can be calculated as:
W j =1
r
L∏l=1
ΓlR,D Al e− j kr j (2.7)
Where r j is the total length of the propagation path for the jth ray.
Using (2.7), (2.2) can be expressed in terms of the overall attenuation and phase
28
shift W as:
~ERx =
m∑j=1
~E j = W ~ET x (2.8)
With
W =m∑
j=1
W j (2.9)
For the calculation of the attenuation and phase shift of each ray W j , the prop-
agation model applied in this chapter considers four propagation mechanism: free
space propagation (LOS), over-rooftop diffractions, vertical-edge diffractions and re-
flections. Scattering losses due to foliage were also included. A detailed description
of the model is provided below.
2.3.1 Free space propagation
A ray is considered to propagate in LOS conditions if at least 55% of the first Fresnel
zone is clear of obstacles [71]. If such ray exists, then its contribution to the total
received electric field is calculated using (2.6).
2.3.2 Over-rooftop and vertical-edge diffractions
Over-rooftop diffractions are evaluated along the radial profile between transmitter
and receiver. Every building obstructing the radial profile is modeled as a perfectly
absorbing half plane perpendicular to the ground plane (multiple knife-edge model)
[72, 73]. The height of the half plane is equal to the height of the building. The
orientation of the edge of the half plane is assumed to be perpendicular to the radial
line joining the transmitter and receiver. The diffraction coefficient for the half plane
model assuming perpendicular incidence is given by [69,72,73]:
ΓnD (φn, φ
′n, Ln) =
−e jπ/4
2√
2πk cos(α/2)· F[kL cos2(α/2)] (2.10)
29

Where φn and φ′n are the angle of the diffracted and incident ray relative to the
nth half plane respectively, as shown in Fig. 2.1. And α is given by:
α = φn − φ′n (2.11)
Ln is a distance factor for the nth half plane, for spherical waves it is given by
[70,74]:
Ln =sn sn−1
sn + sn+1(2.12)
With the distances sn and sn−1 as shown in Fig. 2.2. The function F is called a
transition function and its calculation is based on the following Fresnel integral:
F (x) = 2 j√
xe j x∫ ∞
√x
e− ju2du (2.13)
For the case of diffraction due to multiple half planes, the spreading factor An due
to the nth half plane, is given by [74]:
An =
√√√ ∑n−1k=0 sk
sn ·(∑n−1
k=0 sk + sn) (2.14)
The diffraction coefficient ΓDn and spreading factor An are calculated for every
building that significantly contributes to the diffraction loss, i.e. each building whose
half plane model is touched by an imaginary rubber band stretched over the radial
profile from transmitter to receiver. The imaginary rubber band and diffraction points
due to multiple half planes are shown in Fig. 2.2.
Vertical-edge diffractions are evaluated similarly as over-rooftop diffractions. Cor-
ners of buildings obstructing the radial line between transmitter and receiver are
modeled as half planes. The procedure applied for over-rooftop diffractions is then
followed.
30
2.3.3 Reflections
The specular reflection coefficient ΓR can be computed as shown in (2.15), assuming
vertical polarization of the transmitter antenna [71]:
ΓR =−εr sin θinc +
√εr − cos2 θinc
εr sin θinc +√εr − cos2 θinc
(2.15)
Where θinc is the angle between the incident ray and the perpendicular to the
reflecting surface and εr is the relative permittivity of the reflecting surface.
Our model automatically inspect the area surrounding the transmitter and receiver
in order to determine the existence of obstacles, like walls, that can be sources of
reflected rays. For simplicity, all walls are assumed to be flat, smooth and made up of
concrete. Their relative permittivity was fixed at the typical value of 7, as proposed
in [70].
2.3.4 Scattering losses due to foliage
The received signal is also affected by other obstructions like trees, street signs and
light poles. They provide additional attenuation to the RF signal that can be quan-
tified as scattering losses. In our model, we consider scattering losses due to the
presence of deciduous trees obstructing the propagation path. These losses are com-
puted according to the model proposed by Benzair [75]. According to this model,
when the receiver is located in the shadow of one or more trees, the scattering losses
can be approximated by:
Lscatt (dB) = d f · a · f b[GHz] (2.16)
Where d f is the depth of foliage, a and b are factors that depend on the season:
in the summer a = 0.57, b = 0.6; in the winter a = 0.36, b = 0.43.
Scattering losses are included in the loss of each ray if the corresponding propa-
31

gation path goes through an area covered by trees.
2.3.5 Propagation path loss
The propagation path loss is defined as:
L =PRx
PT x(2.17)
Where PRx and PT x are the received and transmitted power respectively. The
received power PRx is calculated as [70,71]:
PRx = Ae f f
���~ERx���2
ηo(2.18)
Where Ae f f is the effective aperture of the antenna and ηo is the intrinsic
impedance of free space. For omni-directional antennas 1, Ae f f = λ2/4π as described
in [71]. Therefore, the corresponding transmitted power PT x is calculated as:
PT x =4π
ηo
���~ET x���2
(2.19)
Hence, using (2.8) and (2.17) to (2.19), the total propagation loss can be expressed
in terms of the total attenuation and phase shift W as [70]:
L = *.,
λ
4π
���~ERx���
���~ET x���
+/-
2
=
(λ
4π|W |
)2(2.20)
1Note that for path loss prediction, we assume the use of ideal omni-directional antennas. Inpractice, the gains of the antennas have to be included if link budget calculations are applied toestimate received signal power (see (2.30))
32
Or in dB units, we have:
LdB = 20 log10
(λ
4π|W |
)(2.21)
2.3.6 Model parameters
In order to tune the propagation model, a set of adjustable parameters is introduced
in our model calculations. The value of such parameters will be defined by the tuning
algorithm. For simplicity, we have classified the rays reaching a specific receiver’s
location in 5 categories according to their main propagation mechanism, i.e. free
space ray, over-roof top diffracted ray, vertical-edge diffracted rays and reflected rays.
Contributions to the received signal due to rays suffering combinations of multiple
diffractions and reflections are not considered. Based on this classification and using
(2.9), the total attenuation and phase shift W between the transmitter and a particular
receiver’s location can be expressed as:
W = WFS +WRD +WV D +WR (2.22)
Where:
• WFS total attenuation and phase shift of free space ray.
• WRD total attenuation and phase shift of over-rooftop diffracted ray.
• WV D total combined attenuation and phase shift of all rays reaching the receiver
due to vertical-edge diffractions only.
• WR total combined attenuation and phase shift of all rays reaching the receiver
due to single reflections only.
33
With:
WV D =∑
j∈VD
W j WR =∑j∈R
W j (2.23)
Where VD and R are sets containing reflected and vertical-edge diffracted rays
reaching the receiver’s location, respectively.
At this point, we introduce the model parameter set M = {m1,m2,m3,m4,m5}.
Equation (2.22) is then modified to include these model parameters as:
W = m1WFS + m2WRD + m3WV D + m4WR + m5 (2.24)
The purpose of the tuning algorithm is to determine suitable values of the pa-
rameters in M such that the disagreement between physical measurements and the
model predictions is minimized. In general, parameters in M are complex-valued.
The formulation of (2.24) allows the tuning procedure to individually adjust each one
of the main propagation mechanism supported by our propagation model according
to the measured data. Parameter m5 is included in (2.24) to account for those ad-
ditional rays reaching the receiver through propagation paths not considered by the
propagation model, e.g. rays suffering combinations of diffractions and reflections.
2.4 Global, Semi-global and Local tuning
In this section three approaches to tune the propagation model are presented. The
global tuning procedure previously proposed in [24] is included in this chapter for
comparison purposes. Two new approaches are proposed: a semi-global and a local
tuning procedure. In the next subsections we provide more details about each one of
these approaches and a comparison analysis is provided in our results.
34
2.4.1 Global tuning based on LSE
The global tuning approach applied in this chapter is similar to the one proposed in
[24]. The measured values of path losses are compared with the estimations provided
by the prediction model. The LSE method is then applied to find optimal values of
the parameters inM such that the mean square error is minimized. Finally, the path
loss predictions are recalculated with (2.21) and (2.24) using the optimal values of
the model parameters in all receiver locations in the target area.
2.4.2 Semi-global tuning
One of the main disadvantages of the global tuning approach is the fact that only a
unique set of values for the model parameters is found and applied all over the entire
map. Therefore, prediction errors due to local errors or over-simplifications of the
model of the physical environment are not corrected properly. In order to improve
the tuning procedure, a semi-global and local tuning approaches are proposed in this
chapter. The semi-global tuning procedure consists of three basic steps:
First step: Receiver locations are classified in groups based on the level of obstruc-
tion of the propagation path to the transmitter. We determine the level of obstruction
of the path based on the number of buildings obstructing the direct path between
transmitter and receiver. Each group of receiver’s locations Gm is defined as:
Gm = {(x, y) ∈ G|m buildings block the direct path} (2.25)
Where (x, y) are the coordinates of a receiver’s location and G corresponds to the
target area. Based on (2.25), all those receiver locations with LOS conditions belong
to group Go. Similarly, all those receiver locations with one building obstructing the
direct path between transmitter and receiver belong to G1. In the same way, other
35
groups are created if there exist receiver locations with two obstructing buildings and
so forth. This classification of receiver locations based on the level of obstruction
of the propagation path is motivated by an observation made in our previous study
in [24]. We showed that the accuracy of the path loss predictions decrease as the
propagation path becomes more complex (e.g. high level of obstruction of the direct
path between receiver and transmitter) and therefore the value of the parameters
used to tune the prediction model should be adapted accordingly.
Second step: A set of optimal values of the model parameters are calculated for
each group of receiver locations Gm. Such optimal set of parameters is calculated
based only on measured data gathered in places belonging to that group of receiver
locations. Let Mm be the set of optimal parameters for group Gm. Measured data
used to calculate the values of the parameters Mm are selected according to (2.26):
Dm ={d j ∈ D|(x j, y j ) ∈ Gm
}(2.26)
Where D is the set containing all measured data and (x j, y j ) are the coordinates
of the place where measurement d j was collected. According to (2.26), only measured
data gathered in receiver locations belonging to Gm are used to calculate the values of
the set of parameters Mm. For example, optimal set of parameters Mo is computed
based only on measured data collected in locations belonging to Go. The set of
optimal parameters for each group Gm is calculated using the LSE method.
Third step: The path loss predictions are recalculated with (2.21) and (2.24) using
the set of optimal parameters that corresponds to the group where the receiver is
located.
This approach has the advantage that the tuning procedure can correct errors at a
particular receiver location considering only measurements that were taken in places
with similar levels of obstruction of the path. The approach is considered a semi-
36
global tuning method, in the sense that measurements used to calculate the optimal
parameters for each group Gm could have been collected anywhere in the target area
G; not necessarily close to the location where the tuning is to be applied.
2.4.3 Local tuning
As we have mentioned before, the most significant source of prediction errors is due
to inaccurate modeling of the physical environment. Furthermore, there is a trade-off
between complexity of the model and accuracy. In many instances, assumptions and
simplifications are applied to prediction models in order to reduce their complexity.
This is done to facilitate their application in complicated outdoor environments. The
price paid is a reduction in the accuracy.
The insight behind the local tuning procedure is to adjust the model parameters
at a local scale. Consider a particular receiver’s location. The diffractions, reflections
and scattering suffered by the transmitted signal are directly affected by the obstacles
around that receiver’s location, especially buildings. If the size and shape of buildings
around that location are erroneously described in the model of the physical environ-
ment (e.g. due to lack of information), then it is expected that such inaccuracies will
affect the quality of the prediction.
Therefore, a local tuning procedure should be able to identify measured data
that captures the actual propagation conditions around a specific receiver’s locations.
Such information should then be applied to determine a suitable value of the model
parameters for that receiver’s location. This is a significant difference with respect
to the global tuning procedure that calculates a unique set of values of the model
parameters based on measured data collected anywhere in the map, in places subject
to a diverse variety of propagation path characteristics. Our local tuning procedure
can be thought of as a refinement of the semi-global tuning, three basic steps can be
37

used to describe this tuning approach:
First step: Consider a receiver located at a point with coordinates (xi, yi). The
first step of the local tuning consists of identifying a set of measurements Di gathered
at locations in the vicinity of the point (xi, yi), e.g. by defining a circular region of
radius R centered in (xi, yi) and identifying all measured data gathered inside such
region, i.e.:
Di ={d j ∈ D |
(xi, yi) − (x j, y j ) < R
}(2.27)
Based on our previous experimental observations for an urban environment, a
value of R = 20m provides reasonably accurate results [24].
Second step: Measurements in Di that were taken in places whose propagation
characteristics are similar to the ones in (xi, yi) are selected. This is done by creating
a subset of Di, that we denote by D∗i , containing measurements collected at places
where the dominant propagation mechanism matches the one at the receiver’s location
(xi, yi). The subset D∗i is given by:
D∗i ={d j ∈ Di |B( j) = B(i)
}(2.28)
Where B(i) corresponds to the dominant propagation mechanisms at point (xi, yi).
B(i) can be any of the propagation mechanisms supported by the prediction model:
FS, RD, VD or R as described in Section 2.3. The dominant propagation mechanism
at point (xi, yi) is given by:
WB(i) = max{|WFS(i) |, |WRD(i) |, |WV D(i) |, |WR(i) |
}(2.29)
Third step: Measurements in D∗i are used to calculate an optimal set of values of
the model parameters Mi by applying LSE. Such set of parameters values are then
used to calculate the tuned path loss value at point (xi, yi).
38
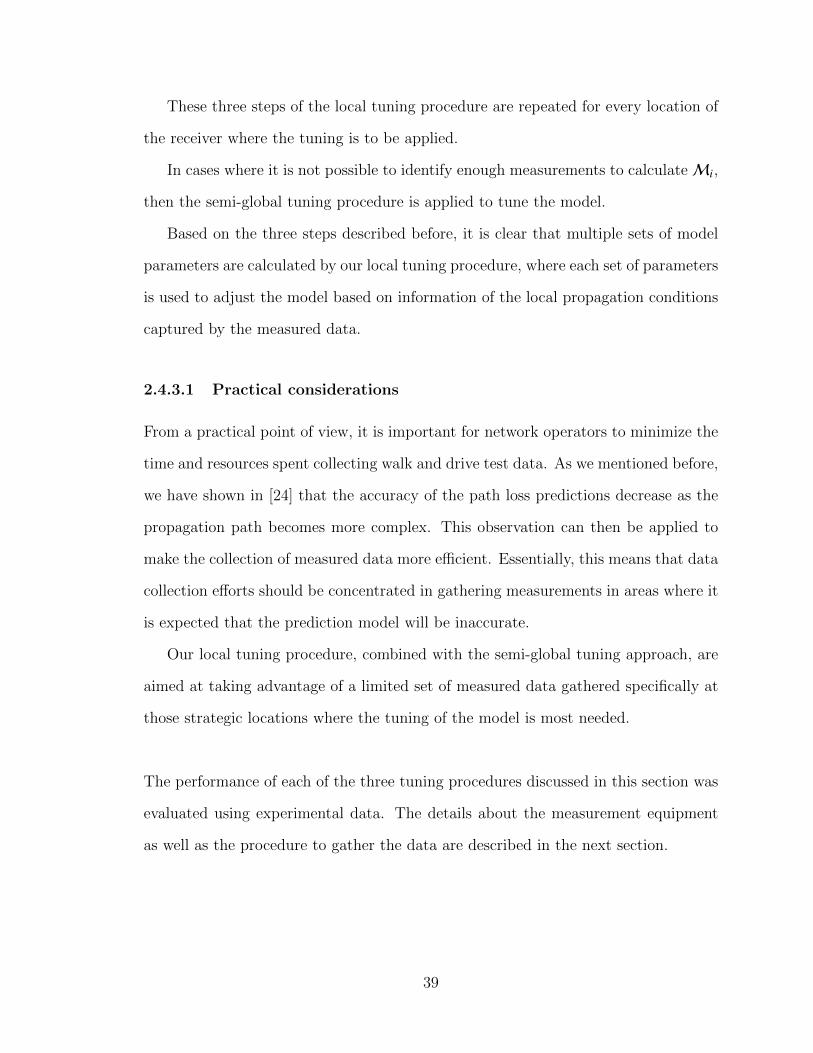
These three steps of the local tuning procedure are repeated for every location of
the receiver where the tuning is to be applied.
In cases where it is not possible to identify enough measurements to calculateMi,
then the semi-global tuning procedure is applied to tune the model.
Based on the three steps described before, it is clear that multiple sets of model
parameters are calculated by our local tuning procedure, where each set of parameters
is used to adjust the model based on information of the local propagation conditions
captured by the measured data.
2.4.3.1 Practical considerations
From a practical point of view, it is important for network operators to minimize the
time and resources spent collecting walk and drive test data. As we mentioned before,
we have shown in [24] that the accuracy of the path loss predictions decrease as the
propagation path becomes more complex. This observation can then be applied to
make the collection of measured data more efficient. Essentially, this means that data
collection efforts should be concentrated in gathering measurements in areas where it
is expected that the prediction model will be inaccurate.
Our local tuning procedure, combined with the semi-global tuning approach, are
aimed at taking advantage of a limited set of measured data gathered specifically at
those strategic locations where the tuning of the model is most needed.
The performance of each of the three tuning procedures discussed in this section was
evaluated using experimental data. The details about the measurement equipment
as well as the procedure to gather the data are described in the next section.
39

Table 2.1: Selected test locations for test transmitter
Location # BuildingTransmitterheight (m)
1 South Tower Residences 372 Dr. John Archer Library 283 Education 214 Riddell Centre 145 Research & Innovation Centre 23
2.5 Gathering of experimental data
A signal strength measurement activity was carried out during the summer time in
the main campus of the University of Regina in Saskatchewan, Canada. Our test
transmitter was placed at five different locations on campus and an average of 630
measurements were recorded for every test location. The test transmitter and receiver
are equipped with calibrated CC2530 transceiver modules, manufactured by Texas
Instruments. Additional amplifiers were implemented to reach the desired transmit
power of 26 dBm.
Measurements were taken at 2.480 GHz with a channel bandwidth of 5 MHz. Ver-
tically polarized dipole antennas were used in the transmitter and receiver units, both
antennas with 5 dBi of gain. The five locations selected to place the test transmitter
correspond to the rooftop of five buildings on campus as indicated in Fig. 2.3. The
height of the transmitter for each one of these locations is provided in table 2.1.
Each of the five measurement sessions consisted of a walk test on the sidewalks
and roads around campus. The height of the receiving antenna was 1.5 meters above
ground level.
Our test signal consisted of bursts of 100 packets of data sent continuously by the
transmitter. Each packet with approximately 60 bytes of information transmitted at
250 Kbps following the IEEE802.15.4 protocol. Every signal strength measurement
40
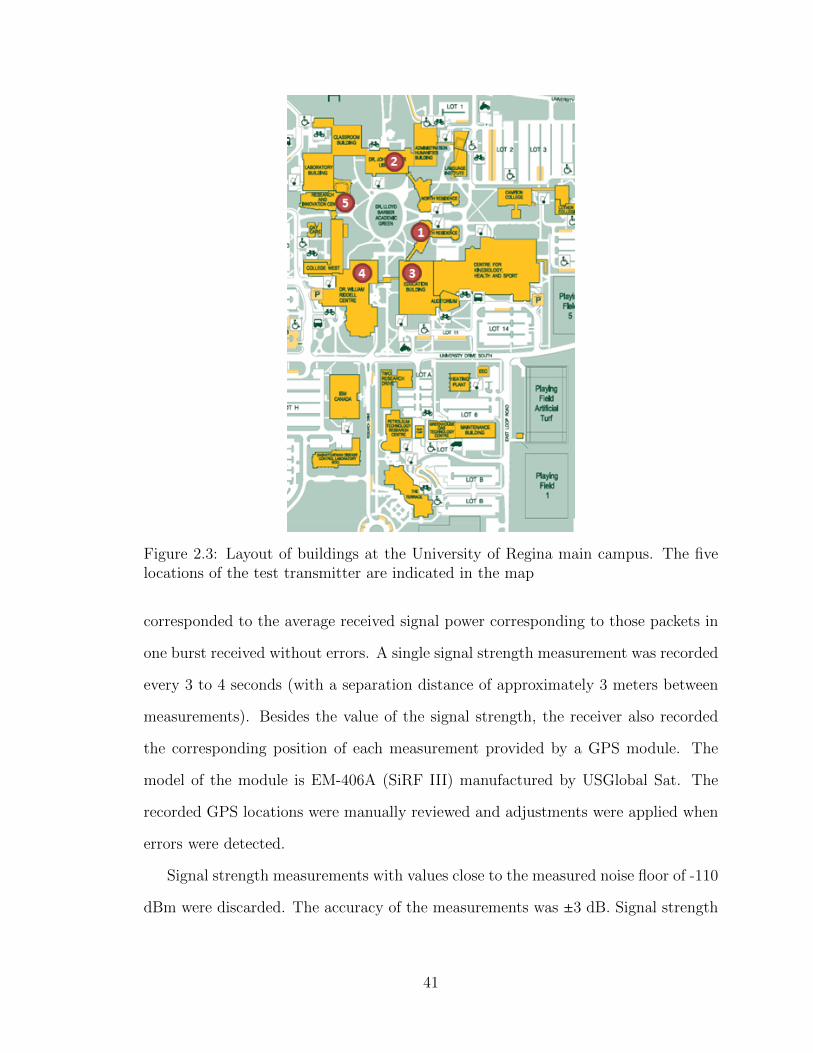
Figure 2.3: Layout of buildings at the University of Regina main campus. The fivelocations of the test transmitter are indicated in the map
corresponded to the average received signal power corresponding to those packets in
one burst received without errors. A single signal strength measurement was recorded
every 3 to 4 seconds (with a separation distance of approximately 3 meters between
measurements). Besides the value of the signal strength, the receiver also recorded
the corresponding position of each measurement provided by a GPS module. The
model of the module is EM-406A (SiRF III) manufactured by USGlobal Sat. The
recorded GPS locations were manually reviewed and adjustments were applied when
errors were detected.
Signal strength measurements with values close to the measured noise floor of -110
dBm were discarded. The accuracy of the measurements was ±3 dB. Signal strength
41

measurements were converted to path loss values using (2.30).
Path loss = PT x + GT x + GRx − Signal strength (2.30)
Where PT x corresponds to the transmission power, GT x and GRx correspond to
the antenna gain of transmitter and receiver units respectively.
The environment of the University of Regina campus can be classified as urban
with flat terrain and irregular location, size and orientation of buildings. The average
building elevation is 17 m with a total of 27 buildings. The area covered by this study
has a rectangular shape with dimensions 600 m by 1000 m as shown in Fig. 2.3.
2.6 Results & Discussion
We performed extensive signal strength measurements as described in Section 2.5
for each one of the five locations of the test transmitter. Our signal strength mea-
surements were converted to path loss values using (2.30). The resulting path loss
measurements were compared with the estimations provided by the propagation pre-
diction model described in Section 2.3. The propagation model was tuned with each
one of the tuning procedures described in Section 2.4: global, semi-global and local.
In the following subsections, we describe our results.
2.6.1 Evaluating the accuracy of the tuned model
For each run of our experiment, the set of measurements collected for each location
of the transmitter was randomly divided in two subsets. The first half of the mea-
surements were used to tune the model (globally, semi-globally and locally), we call
this subset of measurements the training set. The second half of measurements were
used to evaluate the performance of each one of the tuning procedures, we call this
42

Table 2.2: Overall mean error and mean absolute error, in dB
Meanerror
Standarddeviation
Meanabsolute
error
Standarddeviation
Untuned -5.6 10.9 10.1 7.0Global 4.6 9.1 8.1 6.6
Semi-global 3.9 9.0 7.8 6.55Local 0.6 7.9 6.6 6.4
subset the verification set. After tuning the propagation model, a path loss estima-
tion was calculated at each location where a measurement from the verification set
was collected. Then the mean error and mean absolute error was calculated. One
training set and one verification set was defined for each of the five locations of the
test transmitter. The experiment was repeated for a total of 200 runs, in each run
the measurements in the training and verification sets were randomly selected. The
overall mean error and mean absolute error, with their respective standard deviations,
are presented in table 2.2.
A mean error of -5.6 dB was obtained before tuning the model, notice that a
negative error indicates an under-estimation of the path losses. After tuning the
model, it can be observed that the estimation error has a tendency to decrease as
the tuning procedure changes from global to local, where the mean error reaches the
minimum value of 0.6 dB.
A similar trend is observed when the absolute value of the prediction error is
considered, as shown in Fig. 2.4. The highest MAE of 10.1 dB occurs when the
model is untuned. The global and semi-global tuning procedures were able to provide
more accurate path loss predictions compared to the untuned model. However, the
local tuning procedure was able to provide the highest mean absolute error reduction
among the three tuning methods. The local tuning reduced the MAE from 10.1 dB
43
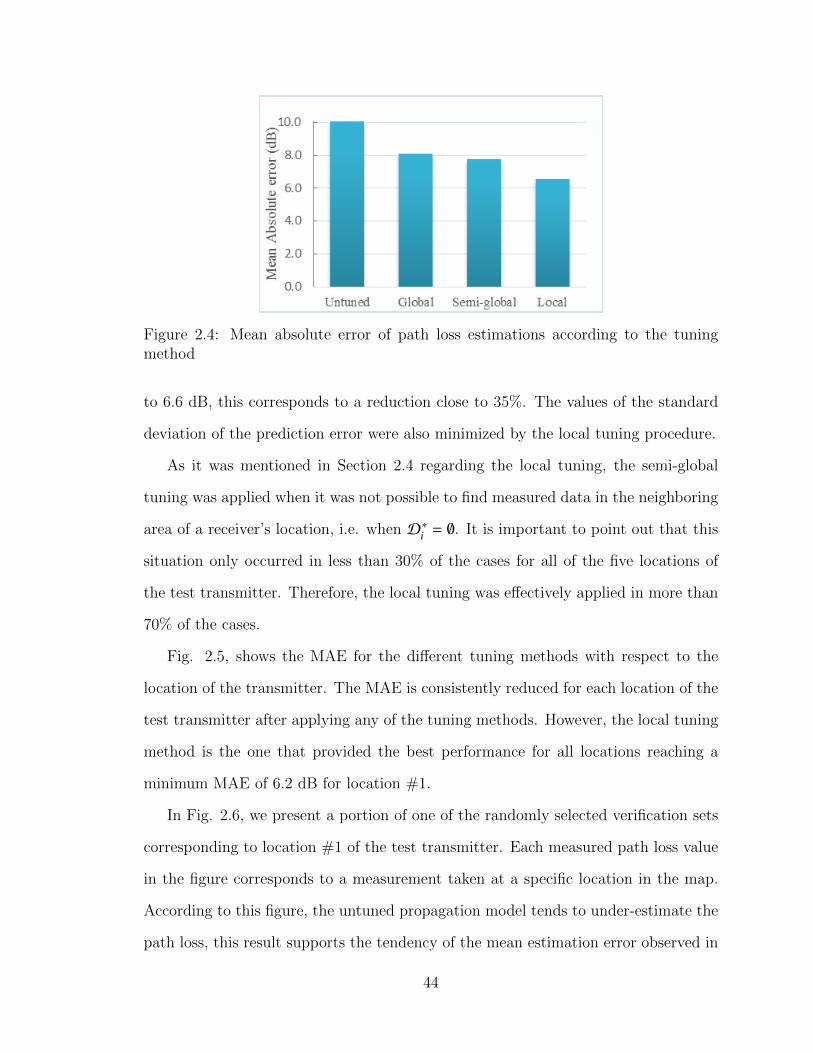
Figure 2.4: Mean absolute error of path loss estimations according to the tuningmethod
to 6.6 dB, this corresponds to a reduction close to 35%. The values of the standard
deviation of the prediction error were also minimized by the local tuning procedure.
As it was mentioned in Section 2.4 regarding the local tuning, the semi-global
tuning was applied when it was not possible to find measured data in the neighboring
area of a receiver’s location, i.e. when D∗i = ∅. It is important to point out that this
situation only occurred in less than 30% of the cases for all of the five locations of
the test transmitter. Therefore, the local tuning was effectively applied in more than
70% of the cases.
Fig. 2.5, shows the MAE for the different tuning methods with respect to the
location of the transmitter. The MAE is consistently reduced for each location of the
test transmitter after applying any of the tuning methods. However, the local tuning
method is the one that provided the best performance for all locations reaching a
minimum MAE of 6.2 dB for location #1.
In Fig. 2.6, we present a portion of one of the randomly selected verification sets
corresponding to location #1 of the test transmitter. Each measured path loss value
in the figure corresponds to a measurement taken at a specific location in the map.
According to this figure, the untuned propagation model tends to under-estimate the
path loss, this result supports the tendency of the mean estimation error observed in
44

Figure 2.5: Mean absolute error per location of the transmitter for different tuningmethods
Figure 2.6: Example of path loss values for location #1 of the test transmitter.Measured path loss values as well as the corresponding untuned and tuned estimationsare presented
table 2.2, where the untuned model provided a negative mean error. Furthermore,
the locally tuned estimations provided the most accurate results compared to the
measured path loss values. The random nature of the path loss values in this figure
is due to the procedure followed to select the verification set and training set for each
location of the test transmitter, such sets were randomly selected for each run of the
experiment.
45
Figure 2.7: Cumulative distribution function of the prediction error
2.6.2 Distribution of the prediction error
The cumulative distribution function (CDF) of the prediction error is presented in
Fig. 2.7. The tendency of the untuned model to under-estimate the losses is clearly
observed (as presented in Fig. 2.6 as well). When the model was not tuned, in 55%
of the cases the prediction error indicated an under-estimation of path losses above
10 dB. This situation was corrected by the tuning methods.
The probability distribution function (PDF) of the prediction error was also cal-
culated based on the CDF presented in Fig. 2.7, the results are shown in Fig. 2.8.
From the PDF of the prediction error, it can be observed that all tuning methods
were able to reduce the mean prediction error. Furthermore, all the tuning procedures
reduced the dispersion of the error compared to the untuned model. We can see how
the local tuning was able to concentrate most of the prediction errors around 0dB
with the minimum level of spreading around its mean compared to the other tuning
methods. Regarding the mean absolute error, its CDF is shown in Fig. 2.9. This
figure shows the superior performance of the local tuning method for all percentiles.
In 60% of the cases the MAE obtained with the local tuning did not exceed 1.4 dB.
Consider also the 80th percentile, the local tuning provided a MAE below 5 dB. In the
46
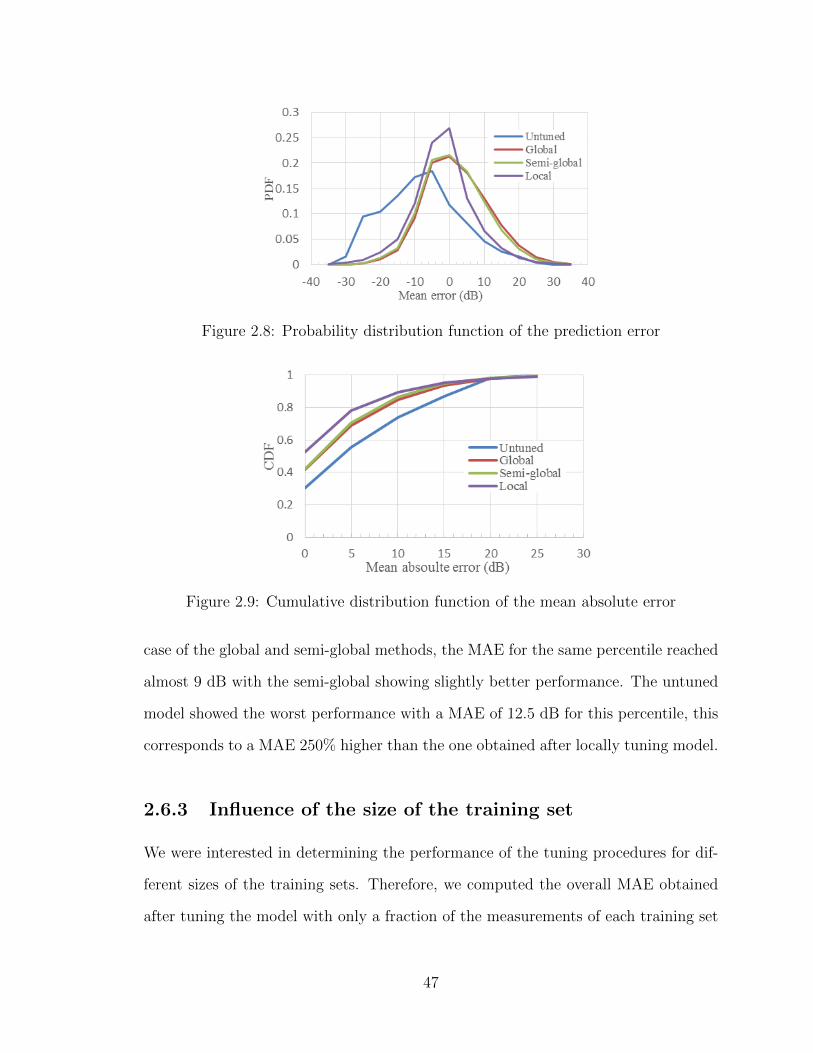
Figure 2.8: Probability distribution function of the prediction error
Figure 2.9: Cumulative distribution function of the mean absolute error
case of the global and semi-global methods, the MAE for the same percentile reached
almost 9 dB with the semi-global showing slightly better performance. The untuned
model showed the worst performance with a MAE of 12.5 dB for this percentile, this
corresponds to a MAE 250% higher than the one obtained after locally tuning model.
2.6.3 Influence of the size of the training set
We were interested in determining the performance of the tuning procedures for dif-
ferent sizes of the training sets. Therefore, we computed the overall MAE obtained
after tuning the model with only a fraction of the measurements of each training set
47
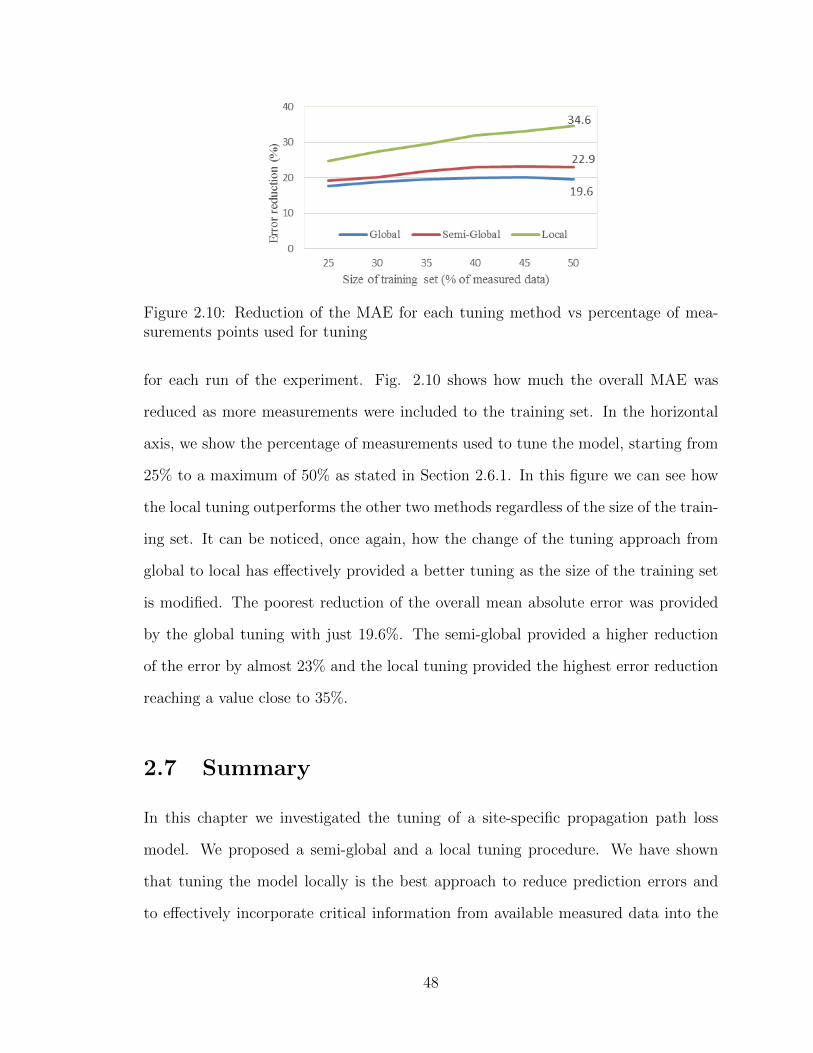
Figure 2.10: Reduction of the MAE for each tuning method vs percentage of mea-surements points used for tuning
for each run of the experiment. Fig. 2.10 shows how much the overall MAE was
reduced as more measurements were included to the training set. In the horizontal
axis, we show the percentage of measurements used to tune the model, starting from
25% to a maximum of 50% as stated in Section 2.6.1. In this figure we can see how
the local tuning outperforms the other two methods regardless of the size of the train-
ing set. It can be noticed, once again, how the change of the tuning approach from
global to local has effectively provided a better tuning as the size of the training set
is modified. The poorest reduction of the overall mean absolute error was provided
by the global tuning with just 19.6%. The semi-global provided a higher reduction
of the error by almost 23% and the local tuning provided the highest error reduction
reaching a value close to 35%.
2.7 Summary
In this chapter we investigated the tuning of a site-specific propagation path loss
model. We proposed a semi-global and a local tuning procedure. We have shown
that tuning the model locally is the best approach to reduce prediction errors and
to effectively incorporate critical information from available measured data into the
48
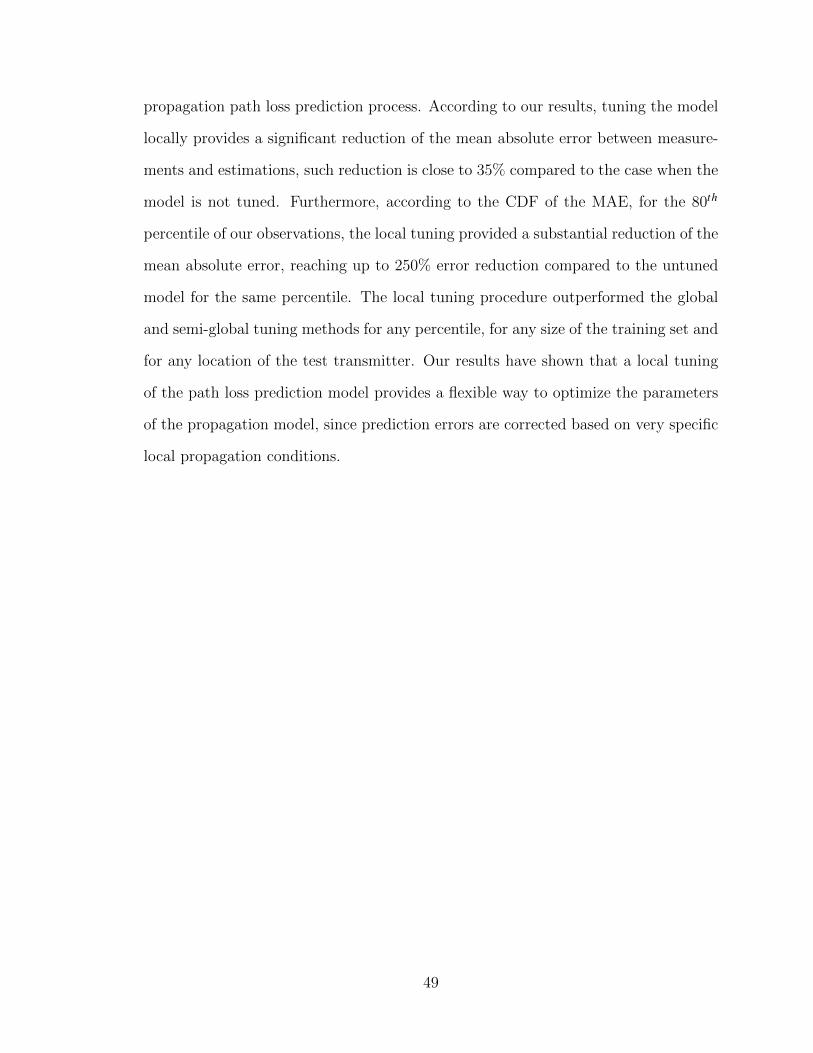
propagation path loss prediction process. According to our results, tuning the model
locally provides a significant reduction of the mean absolute error between measure-
ments and estimations, such reduction is close to 35% compared to the case when the
model is not tuned. Furthermore, according to the CDF of the MAE, for the 80th
percentile of our observations, the local tuning provided a substantial reduction of the
mean absolute error, reaching up to 250% error reduction compared to the untuned
model for the same percentile. The local tuning procedure outperformed the global
and semi-global tuning methods for any percentile, for any size of the training set and
for any location of the test transmitter. Our results have shown that a local tuning
of the path loss prediction model provides a flexible way to optimize the parameters
of the propagation model, since prediction errors are corrected based on very specific
local propagation conditions.
49
Chapter 3
Walk/Speed test simulator forcellular network planning
A walk test is a tedious and time consuming task for mobile network operators,
typically required to verify signal levels and quality of service provided by a newly
deployed cell site. The resources spent in such tests can be reduced with the use
of accurate planning and design tools. In this chapter, we describe and validate
an LTE/LTE-A downlink simulator that is capable of accurately modeling the main
performance metrics collected during walk tests. We evaluated the accuracy of the
simulator to model and capture the characteristic behavior of the quality and strength
of the received signal as users are handed over between cells. Furthermore, we evalu-
ated the capability of the walk test simulator to accurately predict the user experience
at the handover region (in terms of the downlink data rate) under different network
loading conditions. Two traffic models were tested: a Quality of Service (QoS) based
model and the typical Full Buffer model. Our validation was carried out based on
experimental walk test data collected from a live LTE network. Our results indicated
a significant reduction of the estimation error of the data rate of up to 86% with the
QoS-aware traffic model.
3.1 Introduction
The planning of LTE/LTE-A systems is an essential task for network operators. They
face important challenges, for example satisfying an ever growing demand for data
services and the deployment of new technologies like Voice over LTE (VoLTE). Addi-
50
tionally, there is a need to reduce costs during the design and planning stages as well
as to reduce the time spent in these tasks.
Simulation models are essential tools intended to guide the design and planning
process. There exist basic tools that provide RF estimations and basic calculations of
the Quality of Service (QoS) (e.g. maximum achievable data rate) that users would
receive. Commercially available tools like Mentum Planet [76] and iBwave [77] are
some examples of this type of software tools. Mentum Planet is applied in the design
and planning of outdoor systems (e.g. macrocells and microcells), whereas iBwave
is applied for in-building systems (e.g. Distributed Antenna Systems (DAS) and
picocells).
One of the most important tasks during the network planning stage is to make
sure the system is designed to provide the highest QoS possible in the target area.
One key factor to consider during network planning is user mobility and the QoS
provided to users as they move, particularly in high traffic areas, e.g. downtown
areas, university campus, shopping centres. In most cases, commercially available
tools have the limitation of modeling the spatial distribution of users in a static
fashion, hence ignoring the effects of user mobility patterns on network performance.
This is particularly important for the evaluation of the quality of service as users
move between coverage areas. Furthermore, such tools also have limited capabilities
to model the dynamic behaviour of actual data traffic in modern networks. Typically,
a Full Buffer model is assumed, i.e. all base stations have an infinite amount of data
to be delivered to each one of its connected users.
Additionally, many of the contributions described in the literature related to the
area of HetNets, have been evaluated also assuming a static distribution of users
and simplistic traffic models [25, 26]. Recently, there have been important efforts to
incorporate reliable user mobility and traffic models applicable to HetNets [30–32].
Due to this relative lack of simulation models for LTE/LTE-A systems capable of
51
accurately modeling user mobility and predicting the QoS for site-specific scenarios,
operators are usually forced to perform numerous walk and speed tests to verify the
actual user experience in different locations of the service area.
During a walk test, a technician carries a mobile device capable of collecting a set
of different physical measurements, for example the Reference Signal Received Power
(RSRP) and the Reference Signal Received Quality (RSRQ) values from the serving
cell, signal-to-noise-plus-interference ratio (SINR), downlink data rates of HTTP or
FTP transfers, data rates for video streaming and many other tests. The process
of the walk test is time consuming and tedious, since the collection of data usually
requires multiple walks all over the service area. Furthermore, after collecting the data
a significant amount of effort is dedicated to the post-processing of the information.
In this chapter we describe an LTE/LTE-A downlink simulator that incorporates
a model for user mobility. This software can be used by network operators to simulate
walk tests during the design and planning stages of the mobile network. Furthermore,
we incorporate a realistic traffic model based on Quality of Service requirements
defined according to the type of traffic that a specific user demands. We validated
our results with measurement data collected from actual walk tests and compared the
accuracy of our QoS-based traffic model with the popular Full Buffer traffic model.
The chapter is organized as follows: a brief overview of the research work in this
area is presented in Sect. 3.2. In Sect. 3.3 we provide a high level description of
the downlink simulator, including the mobility and traffic models. In Sect. 3.4 we
describe the collection of experimental data. Our results and analysis are presented
in Sect. 3.5 and finally we provide a summary in Sect. 3.6
52
3.2 Related work
Most traditional commercially available simulation tools, e.g. Mentum Planet and
iBwave, provide basic functionalities to estimate the achievable data rate that a spe-
cific user may receive based on factors like: the quality and strength of the received
signal. These simulation tools also allow the operators to manually create traffic
maps. These maps are used to describe the spatial distribution of the users in the
area of interest as well as their demand. These maps are based on demographic data
and estimations of the users demand. In most cases, the simulation tools provide
basic insights regarding the performance of the network under the assumption that
the users are static, hence ignoring the effects of user mobility.
Open source simulation tools, like the Vienna simulator [78, 79], provide the ca-
pability to simulate LTE networks. However, the propagation of signals (e.g. large
and small scale fading) is modeled according to statistical models, hence site-specific
results cannot be obtained. Additional modules would need to be implemented in
order to incorporate custom environment scenarios (e.g. a specific building layout)
in such simulation tools.
On the other hand, in many cases the contributions proposed in the research
literature have been assessed assuming a static distribution of users. Some examples
are the research works in [25, 26], where general analytical models of HetNets are
proposed assuming a uniform distribution of users and without considering any traffic
model. In [25], a theoretical model for the analysis of the downlink of a multi-tier
HetNet was proposed. Based on the random spatial model proposed in [80] (a Poisson
Point Process is used to model the location of base stations of each tier), the authors
developed an analytical model to quantify the probability distribution of the SINR
as well as the outage probability in terms of the base station density for each tier.
A similar analytical model was described in [26]. However, in these approaches the
53
quality of service provided to users is not included in the formulation of the model
and neither a traffic nor a user demand model is provided. In some other instances,
user demand has been modeled according to the traditional full buffer model (i.e. all
base stations have an infinite amount of data to deliver to each one of their users),
but also assuming users are static [27–29].
In modern mobile networks, traffic demand is segmented according to the type
of applications and services that mobiles are executing. For example, a portion of
the users are running bandwidth-intensive applications, while another portion of the
users are performing light browsing and file transfer activities, and another portion
of the traffic could be due to non-user initiated connections (like automatic update of
smartphone “apps”). This segmentation of the traffic is also subject to change during
the day and it is in general not captured by the full buffer traffic model. The need
to develop traffic and mobility models that emulate the actual behavior of users has
been recognized in recent years in [30–32].
In [30], dynamic traffic is included in system simulations, initiation of downlink
data sessions are modeled as a random Poisson process assuming all users are de-
manding files with the same size. According to their model, the time between new
data sessions is exponentially distributed. In [31], a density map is used to randomly
place users in the service area and the popular full buffer traffic model is then applied.
Finally, in [32], the authors identified that proper mobile network modeling should
include a dynamic user population in terms of traffic demand. Most of the current
research on HetNets has focused on static steady state formulations, e.g. the full
buffer traffic model. And such formulations do not capture realistic load variations
with time and space. Therefore, they provide substantially different performance
characteristics compared to actual networks.
In this chapter, we describe an LTE/LTE-A downlink simulator capable of model-
ing the walk/speed tests carried out by network operators during the planning stage
54
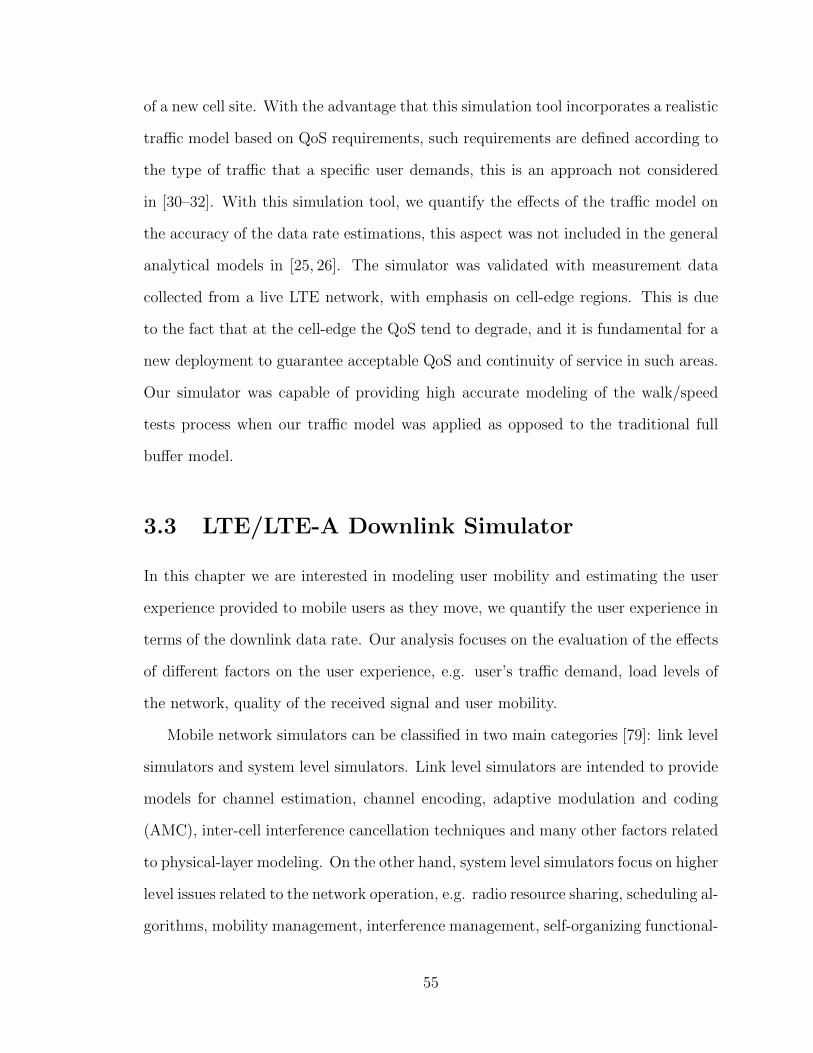
of a new cell site. With the advantage that this simulation tool incorporates a realistic
traffic model based on QoS requirements, such requirements are defined according to
the type of traffic that a specific user demands, this is an approach not considered
in [30–32]. With this simulation tool, we quantify the effects of the traffic model on
the accuracy of the data rate estimations, this aspect was not included in the general
analytical models in [25, 26]. The simulator was validated with measurement data
collected from a live LTE network, with emphasis on cell-edge regions. This is due
to the fact that at the cell-edge the QoS tend to degrade, and it is fundamental for a
new deployment to guarantee acceptable QoS and continuity of service in such areas.
Our simulator was capable of providing high accurate modeling of the walk/speed
tests process when our traffic model was applied as opposed to the traditional full
buffer model.
3.3 LTE/LTE-A Downlink Simulator
In this chapter we are interested in modeling user mobility and estimating the user
experience provided to mobile users as they move, we quantify the user experience in
terms of the downlink data rate. Our analysis focuses on the evaluation of the effects
of different factors on the user experience, e.g. user’s traffic demand, load levels of
the network, quality of the received signal and user mobility.
Mobile network simulators can be classified in two main categories [79]: link level
simulators and system level simulators. Link level simulators are intended to provide
models for channel estimation, channel encoding, adaptive modulation and coding
(AMC), inter-cell interference cancellation techniques and many other factors related
to physical-layer modeling. On the other hand, system level simulators focus on higher
level issues related to the network operation, e.g. radio resource sharing, scheduling al-
gorithms, mobility management, interference management, self-organizing functional-
55
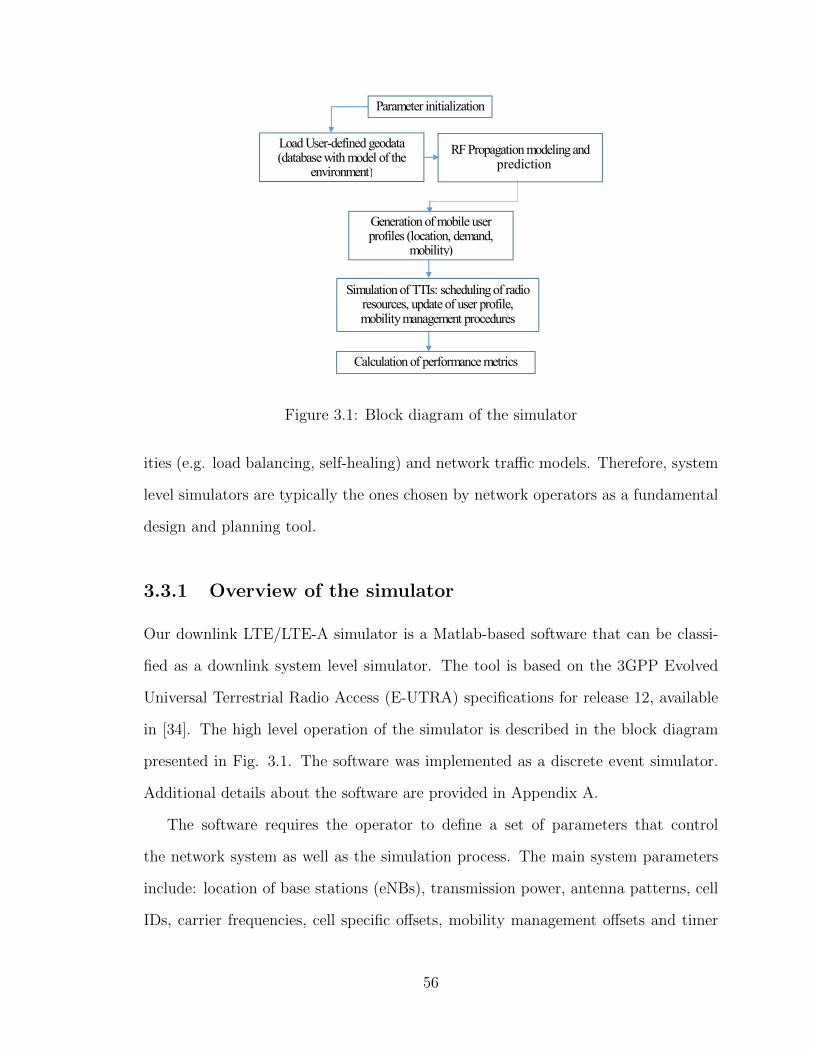
Parameter initialization
Load User-defined geodata(database with model of the
environment)
RF Propagation modeling andprediction
Generation of mobile userprofiles (location, demand,
mobility)
Simulation of TTIs: scheduling of radioresources, update of user profile,mobility management procedures
Calculation of performance metrics
Figure 3.1: Block diagram of the simulator
ities (e.g. load balancing, self-healing) and network traffic models. Therefore, system
level simulators are typically the ones chosen by network operators as a fundamental
design and planning tool.
3.3.1 Overview of the simulator
Our downlink LTE/LTE-A simulator is a Matlab-based software that can be classi-
fied as a downlink system level simulator. The tool is based on the 3GPP Evolved
Universal Terrestrial Radio Access (E-UTRA) specifications for release 12, available
in [34]. The high level operation of the simulator is described in the block diagram
presented in Fig. 3.1. The software was implemented as a discrete event simulator.
Additional details about the software are provided in Appendix A.
The software requires the operator to define a set of parameters that control
the network system as well as the simulation process. The main system parameters
include: location of base stations (eNBs), transmission power, antenna patterns, cell
IDs, carrier frequencies, cell specific offsets, mobility management offsets and timer
56
values (e.g. time-to-trigger timer), system bandwidth, MIMO configuration, cyclic
prefix length. The main simulation parameters include: duration of simulated time,
mobile spatial distribution model, selection of traffic model, speed of mobile users,
selection of mobility model, spatial resolution of the path loss predictions.
Once the parameters have been defined, the software proceeds to pre-calculate
path loss estimations for all cell sites as well as the SINR values at every location in the
map (according to the resolution value defined by the operator). These values are pre-
calculated for the whole area of interest in order to reduce computational time, these
estimations can be saved and loaded for future runs of the simulator. At this point,
the software generates mobile user profiles. Each profile includes aspects like the
location of the mobile user, its traffic demand, speed, direction of movement, serving
cell, etc. For each mobile user, the SINR conditions define the modulation order
and coding rate used to communicate with the serving base station. The measured
SINR is mapped to CQI value and the corresponding modulation and coding scheme
is selected according to the standard. The SINR-to-CQI mapping applied in our
simulations corresponds to the mapping derived in [81] for a 10% block error rate
(BLER).
Where SINRi j is the ratio of the received power from the jth eNB and the to-
tal power of the received interference from neighboring cells belonging to the same
tier plus noise. The function f (·) has been traditionally determined by the Shannon
Hartley theorem, as shown in [27,28,33,36,37]. However, in real networks bi j depends
on the value of the Channel Quality Indicator (CQI) that is periodically reported by
the user equipment (UE). The higher the measured SINRi j , the higher the value of
CQI; which means that the UE is capable of decoding received data with a higher
modulation order and coding rate. Furthermore, the spectral efficiency can also be
improved if the eNB and the UE support MIMO capabilities like spatial multiplex-
ing. The actual mapping between the measured SINRi j and the reported CQI value
57

depends on UE capabilities and have been left by the 3GPP as a vendor specific
implementation. In this study, our simulator uses the mapping derived in [81] for a
10% block error rate (BLER).
Finally, the software simulates each transmission time interval (TTI) in the net-
work. In LTE networks one TTI corresponds to 1 ms. During each TTI a scheduler
algorithm is run for each cell site and the profile of each mobile user is updated. In
the next subsections a brief description of the main components of the simulator are
provided.
3.3.2 Propagation path loss predictions
The propagation prediction model implemented in the simulator is a site-specific
propagation model described in chapter 2 and initially proposed in [56]. This model
is intended for the prediction of received signal power in outdoor environments. The
model is based on ray tracing principles and the classical (UTD). This model supports
the calculation of path losses from multiple rays reaching the receiver due to different
propagation mechanisms, including line-of-sight propagation, reflections, over-rooftop
diffractions, vertical-edge diffractions and scattering losses due to the presence of
vegetation. For receivers located indoors, the user can define a value of penetration
loss in dB/m to roughly estimate the received signal strength inside buildings. The
propagation losses are predicted for every location in the map and for every base
station defined by the operator. It is important to mention that if highly detailed
indoor propagation predictions are required, they can be imported and integrated in
the simulation from commercially available software like iBwave.
58
3.3.3 Spatial Distribution of mobile users
The initial distribution of mobile users, also known as user equipment (UE), is based
on the model selected by the user. Four models are supported:
1. Uniform distribution: all UEs are randomly distributed in the map, this is one
of the simplest distribution models.
2. Hotspot: A certain percentage of UEs (usually around 80%) are placed in the
neighboring area of a cell site, the rest are randomly distributed in the map.
This distribution model is useful for the simulation of HetNets involving small
cells, like microcells or picocells, deployed to provide service to high traffic
hotspots.
3. Traffic map: the user can define a traffic map, which consists of a partition of
the area of interest in regions. The operators can then define the percentage
of mobile users to be randomly placed inside every region. This model is very
realistic in the sense that operators can apply their knowledge about mobile
user density and spatial distribution when creating the traffic map.
3.3.4 Mobility models
To emulate the movement of users, in particular pedestrians, the simulator supports
the following mobility models:
1. Static: the simulator considers all mobile users as static for the entire duration
of the simulation time.
2. Bouncing circle: the user can define a circular region in the map. Then mobile
users will move inside the circle with random (or fixed) speed and direction of
movement. When a mobile user reaches the boundary of the circular region
59
a new direction of movement is selected such that it bounces back inside the
circle.
3. Predefined trajectories: Operators can manually define a set of trajectories
based on their knowledge about how users move in a particular place. Each
manually defined trajectory consists of a set of points (described by latitude
and longitude) that a mobile user follows. In order to model the random nature
of the movement of actual mobile users, we define a small circle of radius r
centered at each manually defined point in each trajectory. Then, each mobile
user moves between points that are randomly selected within each one of the
circles. The larger the value of r, the higher the randomness of the paths. This
model is particularly useful because it allows operators to control the places
where users move, like sidewalks or hallways, and effectively simulate the walk
test process.
3.3.5 Traffic models
The performance of the mobile network is highly dependent on the amount and type
of traffic that mobile users request. Therefore, accurate traffic models are essen-
tial to determine if a particular design or network topology will provide the desired
performance. Our simulator supports the following traffic models:
1. Full buffer: there is an infinite amount of data to be delivered to each UE, i.e.
each mobile user is actively connected during the entire simulation period and
it is always receiving data. This model is typically used as a worst case scenario
to determine the lower bounds of the performance of the network under extreme
load conditions.
2. Finite buffer: the amount of data to be delivered to any UE is not infinite, each
mobile user is expecting to receive a specific amount of data. The total data
60
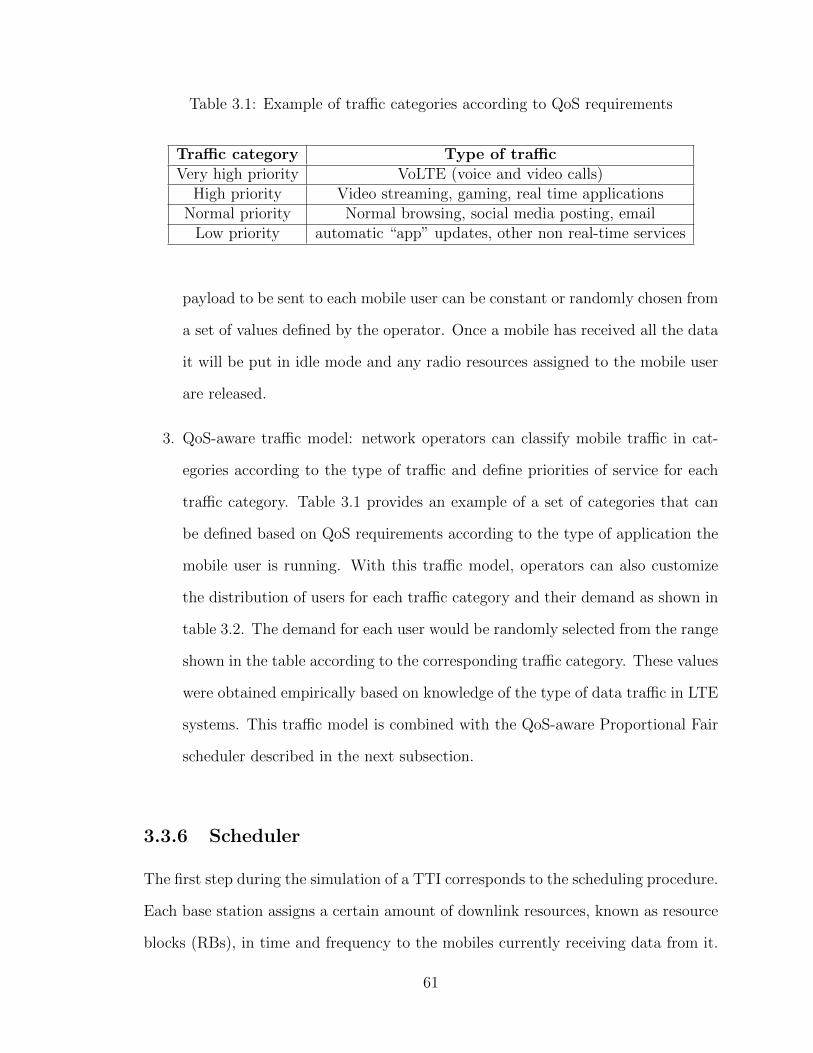
Table 3.1: Example of traffic categories according to QoS requirements
Traffic category Type of trafficVery high priority VoLTE (voice and video calls)
High priority Video streaming, gaming, real time applicationsNormal priority Normal browsing, social media posting, email
Low priority automatic “app” updates, other non real-time services
payload to be sent to each mobile user can be constant or randomly chosen from
a set of values defined by the operator. Once a mobile has received all the data
it will be put in idle mode and any radio resources assigned to the mobile user
are released.
3. QoS-aware traffic model: network operators can classify mobile traffic in cat-
egories according to the type of traffic and define priorities of service for each
traffic category. Table 3.1 provides an example of a set of categories that can
be defined based on QoS requirements according to the type of application the
mobile user is running. With this traffic model, operators can also customize
the distribution of users for each traffic category and their demand as shown in
table 3.2. The demand for each user would be randomly selected from the range
shown in the table according to the corresponding traffic category. These values
were obtained empirically based on knowledge of the type of data traffic in LTE
systems. This traffic model is combined with the QoS-aware Proportional Fair
scheduler described in the next subsection.
3.3.6 Scheduler
The first step during the simulation of a TTI corresponds to the scheduling procedure.
Each base station assigns a certain amount of downlink resources, known as resource
blocks (RBs), in time and frequency to the mobiles currently receiving data from it.
61
One resource block in LTE systems has a duration of one TTI and corresponds to
a set of 12 consecutive subcarriers with a total bandwidth of 180 KHz per RB. The
scheduler is the algorithm that defines the rules for this assignment. Two scheduling
algorithms are supported by our simulator, we describe them below.
1. Proportional Fair (PF): this is a well-known scheduling algorithm and very
popular in OFDMA-based systems like LTE [82]. The PF algorithm assigns
resource blocks to UEs according to a priority score or metric Mi,k (n), where i
and k are the UE and RB identifier respectively, and n is the TTI period. The
metric is calculated according to (3.1).
Mi,k (n) =ri,k (n)Ri (n)
, i ∈ Ik (n) (3.1)
Where ri,k (n) is the rate UE i would receive if RB k is scheduled to it in TTI n,
Ri (n) is the long-term average rate for UE i and Ik (n) is the set of UEs eligible
to compete for the RB k in this TTI. The long-term rate is typically calculated
with an exponential moving average filter. The resource block is assigned to
the user with highest metric Mi,k (n).
With this scheduling algorithm, UEs with poor RF conditions will be assigned
more RBs to satisfy their demand so that they can achieve fair rates compared
to those UEs with good RF conditions (that only need a small number of RBs
to satisfy their demand).
2. QoS aware-PF scheduler: If the QoS-aware traffic model is selected, the clas-
sical PF scheduler is modified to account for the fact that users are classified
according to different traffic priorities. For instance, it is expected that users
with Very high priority traffic should have a higher chance of receiving down-
link resources than those users with a lower priority traffic. Therefore, we have
62

Table 3.2: Example of scheduling probabilities, percentage of users and expected datarates for each traffic category
Traffic category Scheduling probability P Percentage of users Demanded rateVery high 0.85 5% [10,20] Mbps
High 0.75 20% 30 Mbps or higherNormal 0.5 35% [15,30] Mbps
Low 0.3 40% [5,30] Mbps
proposed to modify the set Ik (n) in (3.1) for every scheduling decision for each
RB. In the classical PF algorithm, all connected UEs are allowed to compete for
RB k at TTI n. With the QoS-aware traffic model, we define a set of scheduling
probabilities associated with each traffic category. Table 3.2 shows an example
of these probabilities. We propose to calculate the set Ik (n) for each RB k as:
Ik (n) = {i ∈ I|Pi > gk (n)} (3.2)
Where the set I contains all the UEs expecting downlink resources, Pi is the
scheduling probability of user i according to their traffic category as shown in
table 3.2 and gk (n) is a random number generated from a uniform distribution
in the interval [0,1]. With (3.2), users with high traffic priority are more likely
to be selected to compete for downlink resources than those users with lower
scheduling probability. Therefore, this scheduling algorithm first selects the
users in I, then computes the values of the metric Mi,k (n) for each one of them
and finally it schedules RB k to the UE with highest value of the metric Mi,k (n).
3.3.7 Mobility Management
The intra-frequency handover for connected users in 3GPP systems consists of four
main phases [34]: measurement, processing, preparation, and execution. UEs contin-
uously monitor the received signal strength from their serving base station (SeNB)
63
and the RSRP from their neighboring cells. This is typically carried out by measuring
the RSRP levels (UEs can also monitor the signal quality in terms of the RSRQ).
UEs send measurement reports to their SeNB whenever certain conditions regard-
ing the RSRP samples occur. These conditions, or events, are standardized and set
up by the network operator. There are several events that can trigger the report of
RSRP measurements, named events A1 through A6 [34]. Our simulator supports the
A3 event for intra-carrier handovers (HOs). The entry condition for the A3 event
occurs when the RSRP samples of the SeNB becomes worst than the RSRP samples
of the strongest neighbor cell plus a threshold (A3 threshold). A hysteresis parameter
is also applied to avoid unnecessary triggering of the event due to rapid fluctuations
of the RSRP samples. Once the entry condition is satisfied, it has to remain valid for
a certain period before the UE submits an HO request to its SeNB. This period is
called time-to-trigger (TTT) and it can take values from 40 ms up to 5120 ms. The
user can customize the A3 threshold, TTT and hysteresis as well as define the dura-
tion of the execution of the HO, typically it takes around 50 ms for an HO operation
to be completed based on our observation from actual LTE systems. The A2 event
is also supported, however this event is not typically used by network operators.
3.3.8 Updating state of UEs after each TTI
After every TTI, the simulator updates the UEs position, their measured RSRP and
SINR values, CQI, remaining payload to be received and checks for the triggering of
A3 measurement report event (for handover operations).
3.4 Collection of experimental data
In order to validate our walk test simulator, we performed several actual walk tests at
the University of Regina campus in Saskatchewan, Canada. In this campus, cellular
64
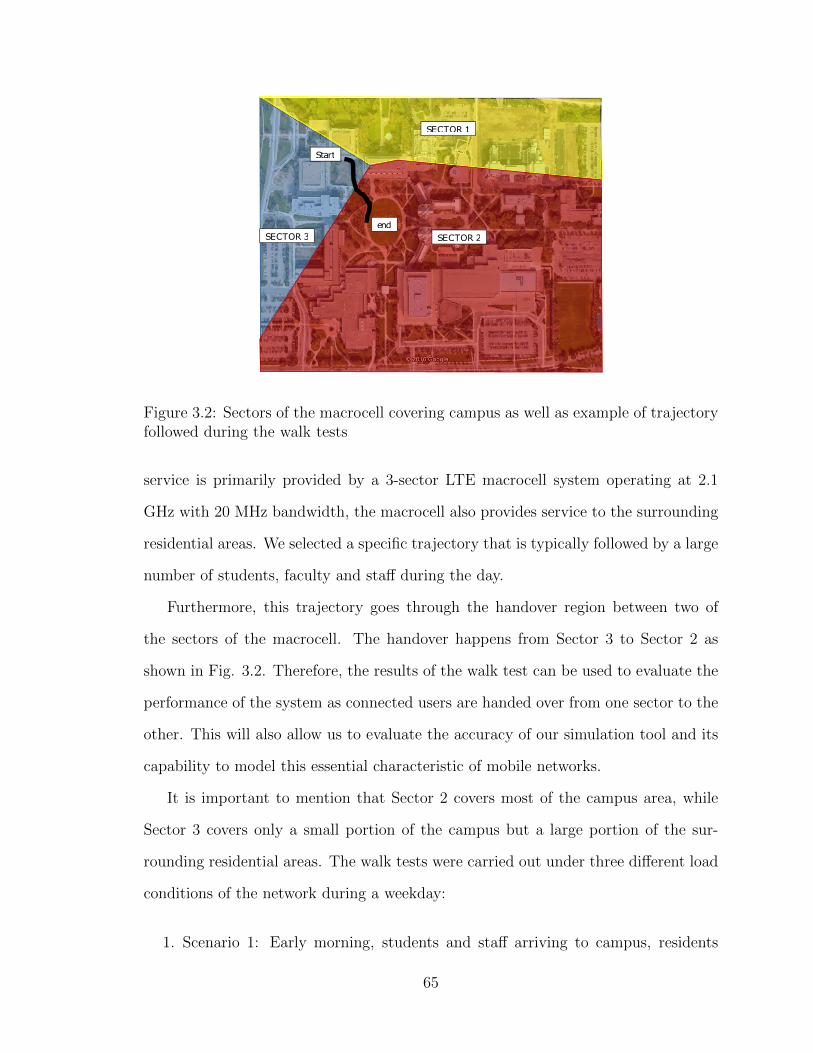
SECTOR 1
SECTOR 2SECTOR 3
Start
end
Figure 3.2: Sectors of the macrocell covering campus as well as example of trajectoryfollowed during the walk tests
service is primarily provided by a 3-sector LTE macrocell system operating at 2.1
GHz with 20 MHz bandwidth, the macrocell also provides service to the surrounding
residential areas. We selected a specific trajectory that is typically followed by a large
number of students, faculty and staff during the day.
Furthermore, this trajectory goes through the handover region between two of
the sectors of the macrocell. The handover happens from Sector 3 to Sector 2 as
shown in Fig. 3.2. Therefore, the results of the walk test can be used to evaluate the
performance of the system as connected users are handed over from one sector to the
other. This will also allow us to evaluate the accuracy of our simulation tool and its
capability to model this essential characteristic of mobile networks.
It is important to mention that Sector 2 covers most of the campus area, while
Sector 3 covers only a small portion of the campus but a large portion of the sur-
rounding residential areas. The walk tests were carried out under three different load
conditions of the network during a weekday:
1. Scenario 1: Early morning, students and staff arriving to campus, residents
65
of surrounding areas are off to work. Typically both sectors have around 40
connected users.
2. Scenario 2: Noon, peak usage during lunch hour. Sector 2 is usually highly
loaded with around 100 connected users, while Sector 3 has lower load of around
60 users.
3. Scenario 3: Evening, most staff members and students have left campus, resi-
dents of surrounding areas are back from work. Sector 2 becomes lightly loaded
with an average of 40 connected users but more users connect to Sector 3,
reaching an average of 70 during this time.
During each walk test, a downlink speed test was carried out. The speed tests
consisted of downloading a large file from an FTP server that is directly connected to
the Core network of the mobile system operator. The walk was repeated 30 times and
data like RSRP and SINR from the serving sector, downlink data rate and serving
cell ID were logged.
An Android-based application called Nemo Walker Air, developed by Anite Inc.
was used to perform the measurement and logging of the walk test data. This appli-
cation was installed on a Sony Xperia Z3 phone. Measurements were logged at a rate
of approximately 300ms.
The data collected from each walk test was averaged after aligning the data in
time using as a reference the execution of the handover between sectors. In Fig.
3.3, we provide an example of the average measured RSRP values during scenario 3.
Note that the horizontal axis represents time and t = 0 indicates the time when the
handover was completed, similarly for Figs. 3.4 to 3.7.
66
3.5 Results & Analysis
In this section we present the results of the validation of our walk test simulator.
3.5.1 RSRP and SINR estimations
In Fig. 3.3 and 3.4 we provide an example of the measured values of RSRP and SINR
corresponding to scenario 3. Time t = 0 in the horizontal axis indicates the completion
of the handover. The edge of both sectors is clearly shown in both figures. The values
of RSRP decreased from -72 dBm in the service area of Sector 3 and decreased to a
value close to -80 dBm right at the moment of the execution of the handover to Sector
2. A similar behavior is observed for the SINR plot in Fig. 3.4, where very low values
of SINR are observed at the cell edge. It is important to mention that our simulator
provided a similar trend as the experimental data. The mean error and mean absolute
errors were computed for every tested scenario, table 3.3 shows the results (a negative
mean error indicates a over-estimation). The overall average of the mean error of the
RSRP estimations was -1.22 dBm and the overall average of the mean absolute error
was 2.3 dBm. Regarding the SINR estimations, the overall average of the mean error
was -0.48 dBm and the overall average of the mean absolute error was 2.25 dBm.
Based on these results it is clear that our modeling of the physical environment and
the propagation of radio frequency signals is relatively accurate.
3.5.2 Downlink data rate
Fig. 3.5, 3.6 and 3.7 show the average data rate measured during our actual walk tests
under the three different scenarios described in 3.4 (once again, time t = 0 indicates
the completion of the handover). We also include our simulation results using two
different traffic models: Full Buffer and QoS-aware, note that during our simulation
the sectors were loaded according to the number of users described in Sect. 3.4. The
67

−50 −40 −30 −20 −10 0 10 20 30 40 50−82
−80
−78
−76
−74
−72
−70
−68
−66
−64
Time (s)
RS
RP
(dB
m)
Experimental dataSimulation
Figure 3.3: Example of the RSRP measured and estimated for scenario 3
−50 −40 −30 −20 −10 0 10 20 30 40 50
0
5
10
15
Time (s)
SIN
R (
dB)
Experimental dataSimulation
Figure 3.4: Example of the SINR measured and estimated for scenario 3
Table 3.3: Mean error and mean absolute error of RSRP and SINR estimations.Standard deviation is shown between brackets, all units in dBm
RSRPScenario 1 2 3
Mean Error -1.32 (3.5) -0.85 (2.9) -1.5 (2.3)Mean Absolute Error 2.72 (2.6) 2.2 (2.1) 1.9 (1.95)
SINRScenario 1 2 3
Mean Error 0.93 (2.5) -1.43 (2.8) -0.94 (2.43)Mean Absolute Error 2.04 (1.8) 2.5 (1.94) 2.22 (1.35)
QoS-aware traffic model was setup with the parameters from table 3.2.
Fig. 3.5 corresponds to the case when both sectors are lightly loaded early morn-
ing. In this case, during our test we were able to measure a significantly high data
68
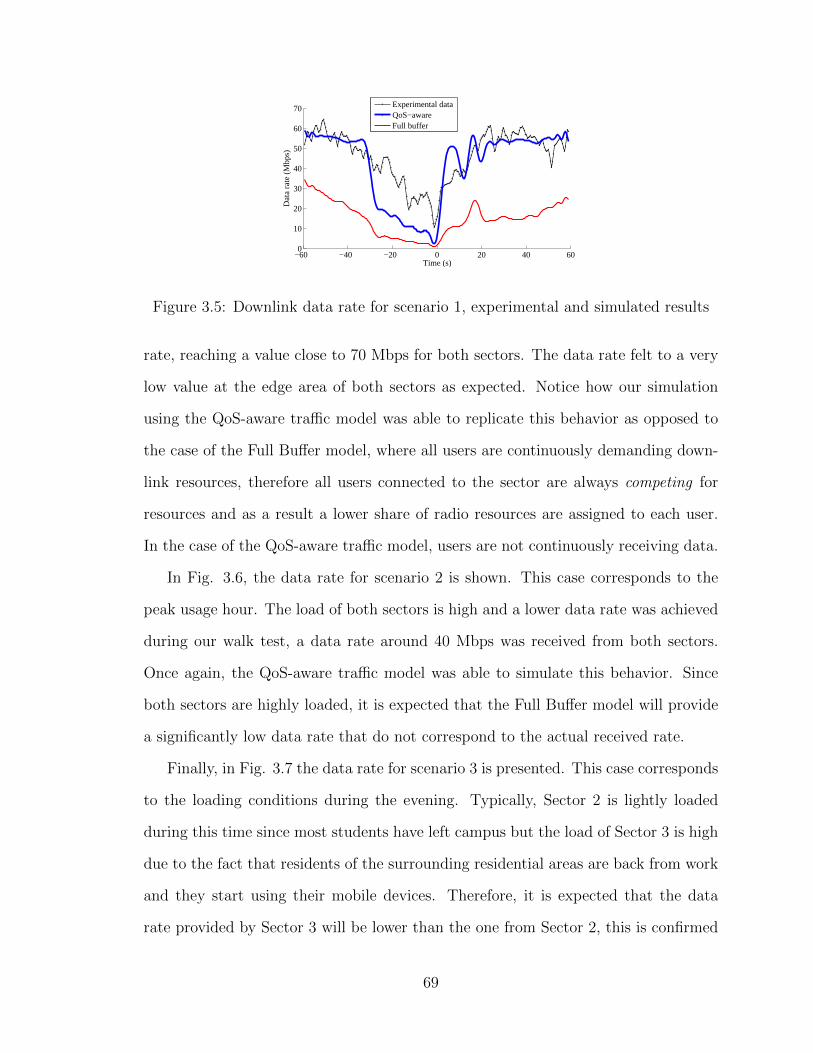
−60 −40 −20 0 20 40 600
10
20
30
40
50
60
70
Time (s)
Dat
a ra
te (
Mbp
s)
Experimental dataQoS−awareFull buffer
Figure 3.5: Downlink data rate for scenario 1, experimental and simulated results
rate, reaching a value close to 70 Mbps for both sectors. The data rate felt to a very
low value at the edge area of both sectors as expected. Notice how our simulation
using the QoS-aware traffic model was able to replicate this behavior as opposed to
the case of the Full Buffer model, where all users are continuously demanding down-
link resources, therefore all users connected to the sector are always competing for
resources and as a result a lower share of radio resources are assigned to each user.
In the case of the QoS-aware traffic model, users are not continuously receiving data.
In Fig. 3.6, the data rate for scenario 2 is shown. This case corresponds to the
peak usage hour. The load of both sectors is high and a lower data rate was achieved
during our walk test, a data rate around 40 Mbps was received from both sectors.
Once again, the QoS-aware traffic model was able to simulate this behavior. Since
both sectors are highly loaded, it is expected that the Full Buffer model will provide
a significantly low data rate that do not correspond to the actual received rate.
Finally, in Fig. 3.7 the data rate for scenario 3 is presented. This case corresponds
to the loading conditions during the evening. Typically, Sector 2 is lightly loaded
during this time since most students have left campus but the load of Sector 3 is high
due to the fact that residents of the surrounding residential areas are back from work
and they start using their mobile devices. Therefore, it is expected that the data
rate provided by Sector 3 will be lower than the one from Sector 2, this is confirmed
69
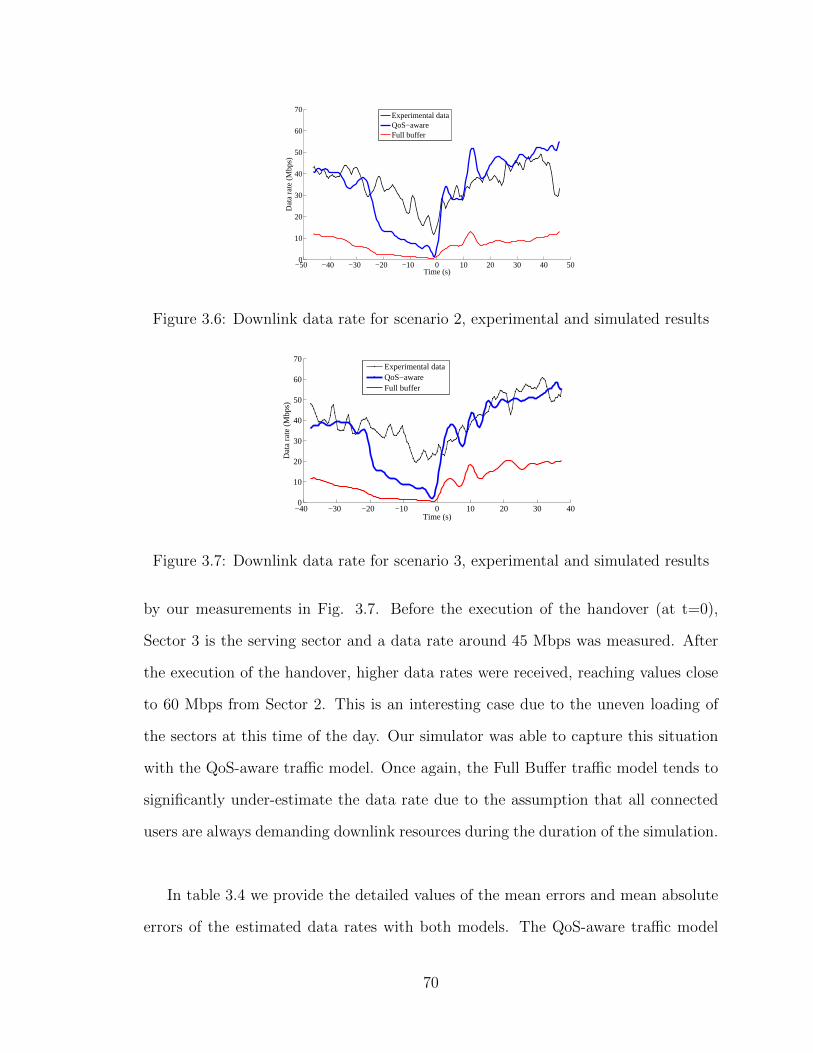
−50 −40 −30 −20 −10 0 10 20 30 40 500
10
20
30
40
50
60
70
Time (s)
Dat
a ra
te (
Mbp
s)
Experimental dataQoS−awareFull buffer
Figure 3.6: Downlink data rate for scenario 2, experimental and simulated results
−40 −30 −20 −10 0 10 20 30 400
10
20
30
40
50
60
70
Time (s)
Dat
a ra
te (
Mbp
s)
Experimental dataQoS−awareFull buffer
Figure 3.7: Downlink data rate for scenario 3, experimental and simulated results
by our measurements in Fig. 3.7. Before the execution of the handover (at t=0),
Sector 3 is the serving sector and a data rate around 45 Mbps was measured. After
the execution of the handover, higher data rates were received, reaching values close
to 60 Mbps from Sector 2. This is an interesting case due to the uneven loading of
the sectors at this time of the day. Our simulator was able to capture this situation
with the QoS-aware traffic model. Once again, the Full Buffer traffic model tends to
significantly under-estimate the data rate due to the assumption that all connected
users are always demanding downlink resources during the duration of the simulation.
In table 3.4 we provide the detailed values of the mean errors and mean absolute
errors of the estimated data rates with both models. The QoS-aware traffic model
70
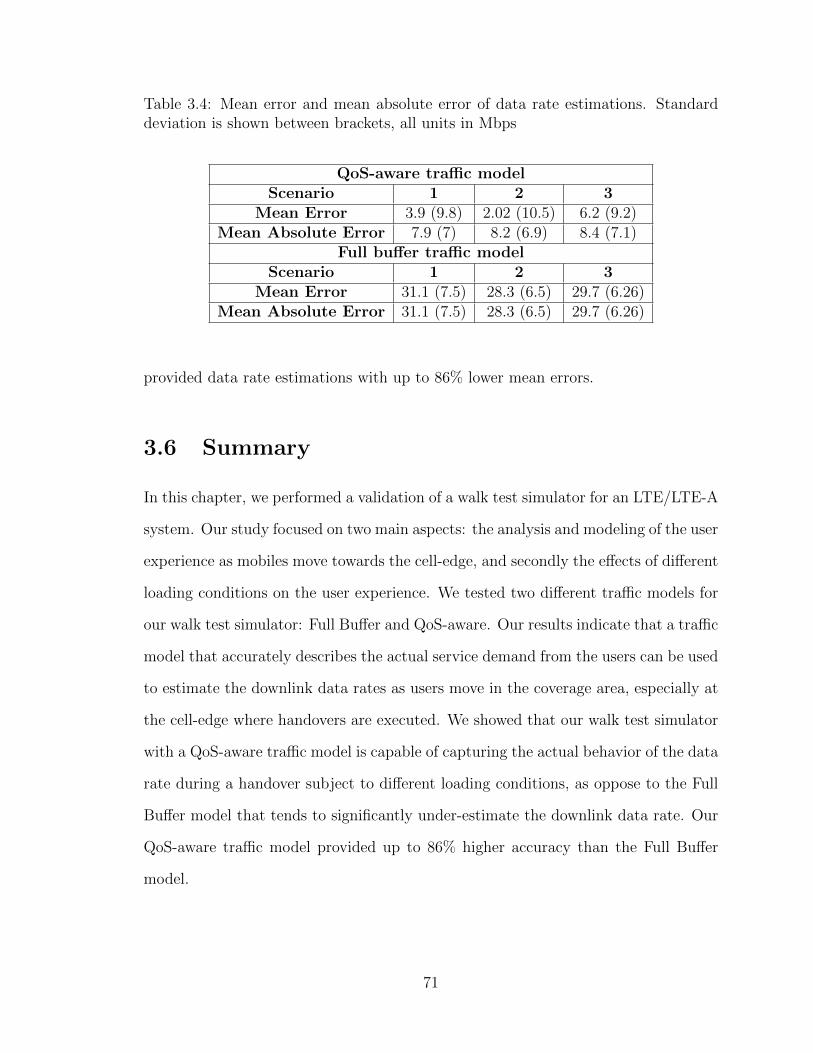
Table 3.4: Mean error and mean absolute error of data rate estimations. Standarddeviation is shown between brackets, all units in Mbps
QoS-aware traffic modelScenario 1 2 3
Mean Error 3.9 (9.8) 2.02 (10.5) 6.2 (9.2)Mean Absolute Error 7.9 (7) 8.2 (6.9) 8.4 (7.1)
Full buffer traffic modelScenario 1 2 3
Mean Error 31.1 (7.5) 28.3 (6.5) 29.7 (6.26)Mean Absolute Error 31.1 (7.5) 28.3 (6.5) 29.7 (6.26)
provided data rate estimations with up to 86% lower mean errors.
3.6 Summary
In this chapter, we performed a validation of a walk test simulator for an LTE/LTE-A
system. Our study focused on two main aspects: the analysis and modeling of the user
experience as mobiles move towards the cell-edge, and secondly the effects of different
loading conditions on the user experience. We tested two different traffic models for
our walk test simulator: Full Buffer and QoS-aware. Our results indicate that a traffic
model that accurately describes the actual service demand from the users can be used
to estimate the downlink data rates as users move in the coverage area, especially at
the cell-edge where handovers are executed. We showed that our walk test simulator
with a QoS-aware traffic model is capable of capturing the actual behavior of the data
rate during a handover subject to different loading conditions, as oppose to the Full
Buffer model that tends to significantly under-estimate the downlink data rate. Our
QoS-aware traffic model provided up to 86% higher accuracy than the Full Buffer
model.
71

Chapter 4
A Distributed Load BalancingAlgorithm for Heterogeneous
Networks
In this chapter, we propose a practical distributed load balancing algorithm for
LTE/LTE-A heterogeneous networks. We have formulated the problem as a local
sum utility maximization. The distributed algorithm is capable of fairly distributing
the load among base stations with a reduced level of coordination. The evaluation
of our load balancing algorithm was carried out through a comparative analysis with
other two near-optimal load balancing algorithms based on convex optimization. We
evaluated the capacity of the algorithms to provide effective offloading capabilities,
fairness of the distribution of the load among base stations and downlink data rate
gains. We also evaluated the practicality of these algorithms in terms of the required
amount of coordination and exchange of information among base stations (e.g. han-
dover triggering). An excessive exchange of signaling messages is undesired and could
lead to an increase in power consumption at the base station level. Additionally, an
excesive number of handovers is undesirable and can negatively affect user experience.
This type of analysis has usually been overlooked in past studies. We tested these
algorithms in a typical HetNet deployment in a university campus, subject to realis-
tic traffic and load distribution. Our results show that our load balancing algorithm
was able to provide similar data rate gains compared to the other two algorithms,
however our approach is substantially less complex. Additionally, our load balancing
algorithm was superior in terms of its practicality due to a significantly low required
level of coordination and exchange of information across base stations.
72
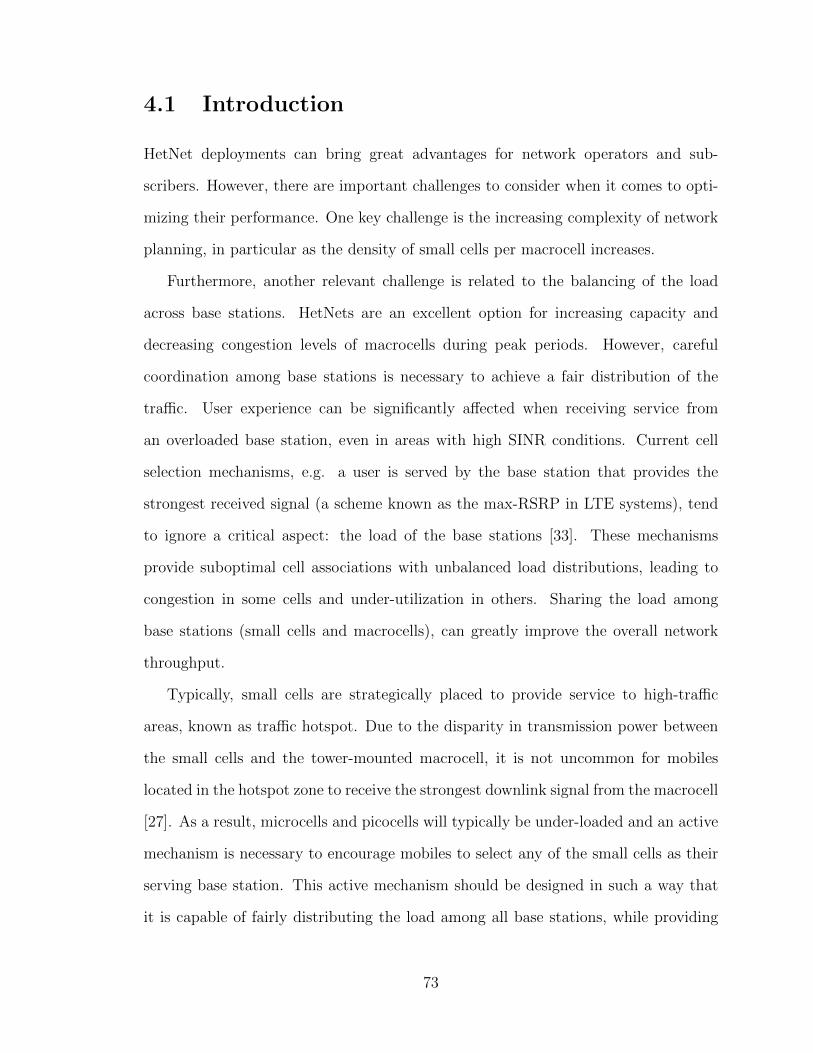
4.1 Introduction
HetNet deployments can bring great advantages for network operators and sub-
scribers. However, there are important challenges to consider when it comes to opti-
mizing their performance. One key challenge is the increasing complexity of network
planning, in particular as the density of small cells per macrocell increases.
Furthermore, another relevant challenge is related to the balancing of the load
across base stations. HetNets are an excellent option for increasing capacity and
decreasing congestion levels of macrocells during peak periods. However, careful
coordination among base stations is necessary to achieve a fair distribution of the
traffic. User experience can be significantly affected when receiving service from
an overloaded base station, even in areas with high SINR conditions. Current cell
selection mechanisms, e.g. a user is served by the base station that provides the
strongest received signal (a scheme known as the max-RSRP in LTE systems), tend
to ignore a critical aspect: the load of the base stations [33]. These mechanisms
provide suboptimal cell associations with unbalanced load distributions, leading to
congestion in some cells and under-utilization in others. Sharing the load among
base stations (small cells and macrocells), can greatly improve the overall network
throughput.
Typically, small cells are strategically placed to provide service to high-traffic
areas, known as traffic hotspot. Due to the disparity in transmission power between
the small cells and the tower-mounted macrocell, it is not uncommon for mobiles
located in the hotspot zone to receive the strongest downlink signal from the macrocell
[27]. As a result, microcells and picocells will typically be under-loaded and an active
mechanism is necessary to encourage mobiles to select any of the small cells as their
serving base station. This active mechanism should be designed in such a way that
it is capable of fairly distributing the load among all base stations, while providing
73
a satisfactory quality of service for all users, in particular for those mobiles located
at the cell-edge. Additionally, such load balancing mechanism should minimize the
overhead cost (in terms of coordination among base stations), as well as reduce the
number of triggered handovers to avoid a negative impact in the signaling load of the
network.
In this chapter, we propose a distributed load balancing algorithm based on traffic
transfer with reduced signaling exchange between eNBs. Given a current suboptimal
user association, each base station can solve locally a load-aware utility maximization
problem. Such problem is solved based on the information of the current eNB’s load
level, resource scheduling and SINR conditions of its associated users. By solving the
utility maximization problem locally, an overloaded base station can determine which
users are negatively impacting its sum of the utility, those users are then candidates
to be transferred to other base stations with spare capacity via load-aware handover
procedures.
The performance of the load balancing algorithm proposed in this chapter was
evaluated through a comparative analysis considering other two near-optimal load
balancing algorithms. The other two algorithms considered in this study are the
ones proposed by Ye et al. in [27], by Shen and Yu in [28]. The evaluation scenario
consisted of a typical HetNet deployment in a university campus venue under realistic
traffic and load conditions. Our results confirmed the benefits of balancing the load in
HetNets. Significant data rate gains were achieved by all three algorithms. However,
our load balancing algorithm is substantially superior in terms of its practicality due
to a lower amount of exchange of information among eNBs as well as a low number
of required handovers.
The chapter is organized as follows: in Sect. 4.2 we provide an overview of the
research work in this area. In Sect. 4.3 we describe the system model. Sect. 4.4
provides details about the mathematical formulation of the load balancing problem,
74
and we also provide a description of our algorithm as well as the load balancing
algorithms described in [27] and [28]. We describe the performance evaluation of the
our load balancing algorithm in Sect. 4.5. Finally, in Sect. 4.6 we provide a brief
summary of this chapter.
4.2 Related work
Significant efforts have been made to propose effective load balancing algorithms
based on traffic transfer strategies. The use of adaptive cell specific offsets, or Range
Extension Bias (REB), to dynamically control the coverage areas of small cells has
been extensively studied [36–41]. With this mechanism, a mobile will add the value
of the bias to the received signal power from a picocell or microcell to “artificially”
increase the power of the small cell, hence this encourages the mobile to select it as
its serving cell as opposed to the macrocell (when the max-RSRP scheme is applied).
Unfortunately, the optimal values of REB are typically calculated based on network-
wide analysis, with bias values specified in a per-tier basis and typically applying
centralized algorithms with slow adaptation. Additionally, these approaches tend to
ignore the fact that users in the range extended area are subject to higher interference
levels and a degradation of the service is expected for those users.
For example, in [36], the authors applied a linear regression-based scheme to
predict a value of the REB with the objective of balancing the load between a picocell
and a macrocell. Their approach consists of the application of a path loss equation
to calculate a “virtual distance” (VD) between a picocell base station and its users,
a concept that was also investigated in [41]. The set of VDs is used to fit a linear
regression model, this model is then used to predict the value of the virtual distance
that would result in a desired number of picocell users defined a priori. With such
new VD, a new value of the REB is calculated by applying the path loss equation.
75
As a result of the new REB value a set of handovers are triggered to transfer users
between the base stations. Their simulation results indicate a better load balancing
compared to the max-RSRP association rule. The approach requires the collection
of measurement reports from mobiles, additionally the concept of VD might not be
accurate enough for indoor environments or highly dense HetNets. Furthermore,
there is no consideration of the degradation in the quality of service for users in the
extended range of the small cell.
In [37], a centralized scheme is proposed to determine suitable values of the REB.
The REB calculation is based on an optimization problem (similarly as in [40]). The
optimization problem is defined in terms of a set of non-linear equations (intended to
model the coupled nature of the load among base stations in the network), this system
of equations include the Jain’s fairness index (see (4.19)). In order to approximate
the solution to this maximization problem, the authors apply the principle of Design
of Experiments (DOE). This is an iterative and statistical approach used to evaluate
the effects of multiple factors simultaneously and determine the most relevant ones.
According to their simulation results, a fairness index of 0.9 can be achieved (a fairness
index closer to unity indicates a fairer load distribution). This approach has the key
disadvantage of being a network-wide centralized approach, this means that tight
coordination among all base stations in the network is required.
The authors in [38,39] proposed the adjustment of the REB based on incremental
steps in order to keep certain performance metrics above a desired target. Such
metrics could include SINR distribution, downlink throughput or the ratio between
the transmission power of a base station and its connected users. A disadvantage of
these approaches is the slow adaptation of the schemes. Their simulation results show
little improvement in the throughput of cell-edge users compared to the case when a
single and static REB is applied, around 5% gain.
On the other hand, authors in [27, 28] have proposed approaching the load bal-
76
ancing issue as a convex optimization problem with the significant advantage that it
can be solved in a distributed fashion. A utility function is formulated, typically in
terms of the users achievable data rate. The optimal cell association that maximizes
the network-wide sum of the utility is found. Unique user association, power control
and load sharing are constraints included in the optimization problem. Approximat-
ing the optimal network-wide user association usually involves the implementation
of complex iterative algorithms, which require significant coordination between base
stations and a substantial exchange of signaling messages between base stations and
users (UEs). Based on their simulation results, these approaches were able to fairly
distribute the load among base stations and obtain significant gains in throughput
for cell-edge users (around 350%), this is an important improvement compared to the
REB-based approaches. A full description of these two algorithms is provided in Sect.
4.4.
The load balancing algorithm proposed in this chapter has been inspired by the
works in [27, 28]. The proposed algorithm does not require a centralized execution,
but more importantly our intention is to reduce the required coordination among
base stations. This is carried out by reducing the amount of signaling messages as
well as the number of triggered handovers. With our load balancing algorithm a base
station can solve locally a load-aware utility maximization problem. We propose to
approximate the solution to the optimization problem with a heuristic method that
requires information that is available locally at the base station level (e.g. load level,
resource scheduling and SINR conditions of its associated users). This approach does
not require the update of the network-wide cell association after every iteration, as
it is done in [27, 28]. Such step significantly increases the number of handovers and
the exchange of messages among base stations.
77
4.3 System model
In this chapter, we have considered the downlink of a two-tier LTE HetNet deployed
in a real environment. UEs are distributed in the area of interest according to a traffic
map derived from statistics collected by a network operator and prior knowledge of
the users distribution. Small cells are deployed spatially in such a way that they
provide coverage to known hotspot areas. In our case of study most of these hotspots
correspond to indoor locations, e.g. food court areas, with high density of users during
peak hours.
For our analysis only downlink data transmission is considered, a study of the
implications of our approach taking into account the uplink is left for future work.
Furthermore, we have considered a HetNet deployment with dedicated spectrum for
each tier, i.e. macrocells and small cells use different frequency bands. Even though
only intra-layer interference is considered, our approach can be extended to the case
of co-channel deployments where an inter-cell interference coordination technique
(eICIC) is applied, e.g. Almost Blank Subframes (ABS) [83,84]. Additionally, for the
macrocell layer the inter-cell interference from neighboring macrocells is assumed to
be negligible. We denote by J the set of all base stations, and I the set of all users.
The total number of active users is denoted as NU , while the total number of base
stations is denoted as NB. User association is defined as in [27], the indicator variable
xi j describes the association of the UE i to eNB j and it is defined as:
xi j =
1 ith UE is associated to jth eNB
0 otherwise
(4.1)
The set of users associated with the jth eNB is denoted as:
Ij ={i |xi j = 1, i ∈ I
}(4.2)
78

The instantaneous downlink data rate offered by the jth eNB to the ith user, during
subframe k is defined as:
ri j (k) = ωoi j (k) · bi j (k) (4.3)
Where ωoi j (k) is the bandwidth in Hz scheduled (offered) for downlink transmissions
to the ith UE. The value bi j (k) corresponds to the normalized rate of the UE in b/s/Hz
and is, in general, a function of the SINRi j as:
bi j = f (SINRi j ) (4.4)
Where SINRi j is the ratio of the received power from the jth eNB and the total power
of the received interference from neighboring cells belonging to the same tier plus
noise. The function f (·) has been traditionally determined by the Shannon Hartley
theorem, as shown in [27,28,33,36,37]. However, in real networks bi j depends on the
value of the Channel Quality Indicator (CQI) that is periodically reported by the UE.
The higher the measured SINRi j , the higher the value of CQI; which means that the
UE is capable of decoding received data with a higher modulation order and coding
rate. Furthermore, the spectral efficiency can also be improved if the eNB and the UE
support MIMO capabilities like spatial multiplexing. The actual mapping between
the measured SINRi j and the reported CQI value depends on UE capabilities and
have been left by the 3GPP as a vendor specific implementation. In this study, our
simulator uses the mapping derived in [81] for a 10% block error rate (BLER).
The long-term rate of user i is calculated as the average of the instantaneous rate
during a certain number of subframes K :
Ri j =
K∑k=1
ri j (k)K
(4.5)
79

4.3.1 Load of eNBs
In an LTE/LTE-A network, all active UEs that connect to an eNB have to share
the available bandwidth. Each one of the UEs demands a specific quality of service
depending on the running application. Low bandwidth demand may correspond to
voice calls or downloading small files, whereas bandwidth intensive applications like
HD video streaming or gaming, requires higher demand of resources. The task of the
scheduler is to distribute the available bandwidth such that the demanded quality of
service of each user is satisfied, while keeping a sense of fairness.
The load of an eNB can be quantified in terms of the demanded load and the
offered load. A demanded load index and offered load index are defined as [36]:
LDj =
∑i∈Ij ω
Di j
W j(4.6)
LOj =
∑i∈Ij ω
Oi j
W j(4.7)
Where ωOi j and ωD
i j are the average offered and demanded bandwidth of the ith
user respectively during K subframes, and W j corresponds to the total bandwidth of
the jth eNB. The offered load index LOj reaches its maximum value of one when the
totality of the bandwidth have been scheduled for downlink transmissions. On the
other hand, the demanded load index LDj can take values larger than 1, e.g. when
the total demand of bandwidth is higher than the available bandwidth.
A base station whose offered load index is below unity is assumed to be under-
loaded since a portion of its bandwidth has not been scheduled, hence it has spare
capacity. However, when the offered load index approaches unity and the demanded
load index is above unity, then the base station is considered to be overloaded, since
it does not have enough resources to satisfy its current demand. The sum throughput
of a base station can be greatly impacted by the overload condition, resulting in a
80

degraded quality of service. A situation that is undesirable for network operators.
4.4 Problem formulation and description of load
balancing algorithms
The goal of an effective load balancing algorithm is to balance the overall load in the
network between eNBs. Typically, network-wide optimization techniques have been
proposed to solve the load balancing problem [27,28]. Based on the long-term rate of
the ith user, a utility function Ui (Ri j ) is calculated and a network-wide optimization
problem is formulated to find the optimal user association:
X = arg maxX
∑i∈I
∑j∈J
xi j ·Ui (Ri j )
s.t.∑j∈J
xi j = 1,∀i ∈ I
xi j ∈ {0, 1},∀i ∈ I,∀ j ∈ J
(4.8)
With X = {xi j |i ∈ I, j ∈ J } being the network-wide user association. The ob-
jective is to find the optimal distribution of UEs X among all the eNBs subject to
the constraint that any UE has to be associated to only one eNB. The optimal cell
association provides the maximum sum of the utilities of all the users in the network.
As it has been mentioned in [27, 28], the optimization defined in (4.8) is a combina-
torial problem whose computation is intractable for real size networks. The problem
becomes more challenging due to the coupled relationship between the load of each
eNB and the user association, since the long term rate Ri j depends on how loaded
the jth eNB is. Different authors have proposed relaxations to reduce the complexity
of the optimization problem, e.g. in [27] a fractional user association scheme allows
a user to be associated with more than one base station. Additionally, significant
efforts have been made to solve (4.8) in a distributed manner [28]. Unfortunately,
many of the proposed methods require high coordination between base stations and
81

a significant amount of exchange of messages between users and eNBs.
Our load balancing algorithm based on a local optimization method (LOM) is pre-
sented below. Additionally, for comparison purposes we also provide in this section
a brief description of two other load balancing algorithms based on convex optimiza-
tion. These algorithms were proposed by Ye et al. in [27] and by Shen and Yu in [28].
Both these algorithms approximate the solution to the problem formulated in (4.8)
by applying Lagrangian dual decomposition analysis. The algorithm proposed in [27]
is based on the subgradient method (SGM), and the one proposed in [28] is based on
the dual coordinate descend method (DCD).
4.4.1 Load balancing algorithm based on local optimization(LOM)
In this subsection, we describe our load balancing algorithm, initially proposed in
[57]. Instead of solving the network-wide optimization problem stated in (4.8), we
simplify the problem by letting each base station determine its own local optimal
user association, imposing a constraint based on the desired level of demanded load.
The simplified optimization problem can be expressed in terms of a local indicator
variable xi as [57]:
X j = arg maxX j
∑i∈Ij
xi ·Ui (Ri j )
s.t.∑i∈Ij
xi · ωDi j < αW j
xi ∈ {0, 1},∀i ∈ Ij, α ≥ 1
(4.9)
With X j = { xi |i ∈ Ij }. The local optimal user association X j can be calculated by
each base station considering all the UEs currently associated to it. By solving (4.9),
each base station can select from the set of associated UEs a subset of users that
maximizes its own sum of the utility function. The optimal local user association X j
82
must also satisfy a constraint related to the desired level of demanded load, i.e. the
total demanded load of the selected users must not exceed the value αW j , where the
parameter α can take a value higher or equal than 1. A value of α closer to unity
will provide a stricter selection of UEs. Such parameter can be setup by the network
operator.
Similarly as in [27, 28], we have selected a logarithmic utility function. As it was
stated in [27], the logarithmic function has the advantage that it yields high utility
values if more resources are provided to users with low rates (cell-edge users) as
opposed to providing the same amount of resources to users already with good rates.
This encourages cell-edge users associated with overloaded eNBs to be transferred to
underloaded base stations where they can receive more resources, hence improving
the balance of the load among eNBs. In our case we define the logarithmic utility
function as:
Ui (Ri j, ωOi j ) = log *
,
Ri j
ωOi j
+-
(4.10)
The quantity Ri j/ωOi j represents the average normalized long-term rate for the ith
UE in b/s/Hz.
We approximate the solution of the problem formulated in (4.9) with an approach
based on greedy heuristics. We first start by calculating the values of the utility
function for each user associated to a base station. Then, the users are sorted in
descending order based on the corresponding value of the utility function. Starting
with the user with highest value of utility, its indicator function xi is set to “1” if
the resulting cumulative demanded load is below αW j . The rest of the users are
evaluated sequentially, and their indicator function xi will be set to “1” as long as
the total cumulative demanded load constraint is satisfied. Otherwise, the indicator
function will take the value of “0”. The pseudo-code of this process is presented in
Algorithm 4.1.
83

Algorithm 4.1 Get X j
Require: Set U = {Ui |i ∈ Ij }
Require: Set WD = {ωDi j |i ∈ Ij }
Require: Parameter α1: demanded load ← 02: Sort(U) in descending order3: for n = 1 to |Ij | do4: UEn ← Get UE(U )5: if demanded load + ωD
nj < αW j then6: xn = 17: demanded load = demanded load + ωD
nj8: else9: xn = 0
10: end if11: end for12: X j ← { xn}
Based on the set X j , the base station can determine which users are candidates to
be transferred to underloaded neighboring base stations. We define the sets Sj and
Tj as:
Sj ={i | xi = 1, xi ∈ X j
}(4.11)
Tj ={i | xi = 0, xi ∈ X j
}(4.12)
The set Sj contains the subset of users that will continue to be associated with
the jth eNB after X j has been obtained from algorithm 4.1. The set Tj contains the
subset of users that the base station will attempt to transfer to other underloaded
eNBs via handover operation.
After the sets Sj and Tj are known, it is time to actively transfer the excess load
to base stations with spare capacity. For each user in Tj , the base station should
submit a handover request to another base station with spare capacity, and whose
RSRP and SINR measured by the user satisfy the cell selection criteria defined by
the operator. The values of RSRP and SINR of neighboring cells are obtained from
84
measurements reports submitted by the users in Tj .
Evidently, the overloaded base station must know the current loading condition
level of its neighboring cells so that it can select target eNBs that are underloaded.
This information can be obtained from a centralized unit in charge of periodically
broadcasting load indicators (e.g. the offered and demanded load indexes) of all the
base stations. For our proposed algorithm, this is the only piece of information that
base stations need to share among each other. The exchange of this information is a
functionality expected to be part of self-optimizing networks (SON) [85].
It is expected that an overloaded base station might not be able to transfer all the
users in Tj . This could happen when the selected target eNBs might not have sufficient
spare capacity to handle all the handover requests or when there are no suitable
neighboring cells to submit the handover request (low RSRP and SINR values from
neighboring cells). Therefore, those UEs whose handover was unsuccessful, should
be reassociated to the source base station, i.e. the value of xi corresponding to those
users should be set to “1” and the sets Sj and Tj should be updated accordingly.
As a consequence of this practical limitation in real networks, the resulting user
association of an overloaded base station might not completely satisfy the demanded
load constraint in (4.9).
This load balancing algorithm can be combined with a dynamic adjustment of the
REB to further increase data rate gains. We refer the reader to appendix B, where we
investigate this possibility and provide a basic preliminary evaluation of the resulting
performance.
4.4.2 Algorithm based on the Subgradient Method (SGM)
The use of Lagrangian dual decomposition to solve the load balancing problem for-
mulated in (4.8) was initially proposed in [27]. Two dual variables are defined:
85
µ = [µ1, . . . , µNB ]T (which can be interpreted as BS-specific prices), and ν. The
maximization of the Lagrangian function in the dual domain is achieved with the
following user association rule [27]:
x∗i j =
1 if j = j (i)
0 if j , j (i)(4.13)
Where j (i) is given by (4.14) as:
j (i) = arg maxj ′
(ai j ′ − µ j ′), ∀ j′ ∈ J (4.14)
With ai j being the achievable utility that user i would obtain if it is associated
with eNB j. It is given by:
ai j = log(W j log
(1 + SINRi j
))(4.15)
According to (4.14), UEs select as its serving cell the eNB that provides the highest
value of its utility minus the BS-specific price. The values in µ should be calculated
in such a way that the load among eNBs is balanced. This pricing interpretation of
the dual variable µ is further discussed in [27,28].
In [27], the subgradient method is proposed to calculate the values of the dual
variables in an iterative manner. During the (t + 1)th iteration of the algorithm, the
BS-specific prices are updated according to [28]:
µ(t+1)j = µ(t)
j − β(t) *
,eµ
(t)j −ν
(t)−1−
∑i
x∗(t)i j+-
(4.16)
The variable β(t) is a step size that can be calculated with a self-adapted scheme as
proposed in [27]. Such scheme depends on many parameters whose selection greatly
affects the speed of converge as shown in [28]. The other dual variable ν(t+1) is given
86

by:
ν(t+1) = log *.,
∑j eµ
(t)j −1
NU
+/-
(4.17)
For the algorithm to converge, all BS-specific prices µ j have to be calculated with
the same value of the step size, hence tight synchronization between eNBs is needed.
Finally, the primal variable X is obtained from the dual variables by applying (4.14).
This load balancing method is summarized in Algorithm 4.2. For a more detailed
description of this method we refer the reader to [27].
Algorithm 4.2 Subgradient method
Initialization: Set µ j = 0,∀ j. Set ν = log∑
j eµ j−1/NU
1: repeat2: UEs are associated to eNBs according to (4.14)3: for each j ∈ J do4: Update BS-specific price µ j with (4.16)5: end for6: eNBs broadcast updated price to all eNBs and users7: Update dual variable ν with (4.17)8: until Dual objective function converges9: Final BS association is given by applying (4.14)
4.4.3 Algorithm based on Dual Coordinate Descend (DCD)
Similarly as in [27], authors in [28] also apply a Lagrangian dual analysis to obtain the
network-wide user association that approximates the solution to (4.9). However, the
use of a dual coordinate descend approach is proposed as the mechanism to update
the BS-specific prices µ j . The values of the BS-specific prices are updated according
to [28]:
µ(t+1)j = sup
{µ j | f (t)
2 (µ j ) − f (t)1 ≤ 0
}(4.18)
With f (t)1 being the number of UEs currently associated to eNB j and f (t)
2 =
eµ(t)j −ν
(t)−1.
87
The resulting algorithm for load balancing is then identical to the SGM method,
with the exception that (4.18) must be used to update the BS-specific prices as op-
posed to (4.16) in line 4 of the Algorithm 4.2. A key advantage of the dual coordinate
descent method is the fact that it does not depend on a step size and convergence
is faster. However, as stated in [7, 28], this is in general a suboptimal approach and
a tight duality gap exists. Additional details about this method as well as an upper
bound of the duality gap can be found in [28].
4.5 Performance evaluation
The performance evaluation of the three load balancing algorithms described in Sect.
4.4 was carried out considering a two-tier HetNet deployment in the University of
Regina campus, in Saskatchewan, Canada. This university campus corresponds to a
urban environment with irregular distribution of buildings over a flat terrain. A 3D
model of the environment, including 18 buildings, was created with a resolution of 1
m. The area under study has dimensions 600 m by 700 m. The distribution of the
buildings is shown in Fig. 4.1.
The two-tier HetNet considered in this study consists of one three-sector macrocell
(cells 1,2 and 3) and four outdoor microcells (cells 4,5,6,7) as shown in Fig. 4.1. The
macrocell is located on the rooftop of a building at a height of 36 m, its transmission
power was set at 47 dBm and it operates at 2.1 GHz. All microcells are mounted
on lamposts with a height of 6 m, their transmission power was set at 30 dBm and
their carrier frequency is 2.6 GHz. Users were distributed spatially according to a
traffic map derived from network statistics and knowledge of the users’ distribution.
The traffic map is presented in Fig. 4.1. The classical proportional fair scheduler was
applied in our simulations [82].
The propagation model applied in this study corresponded to a site-specific path
88
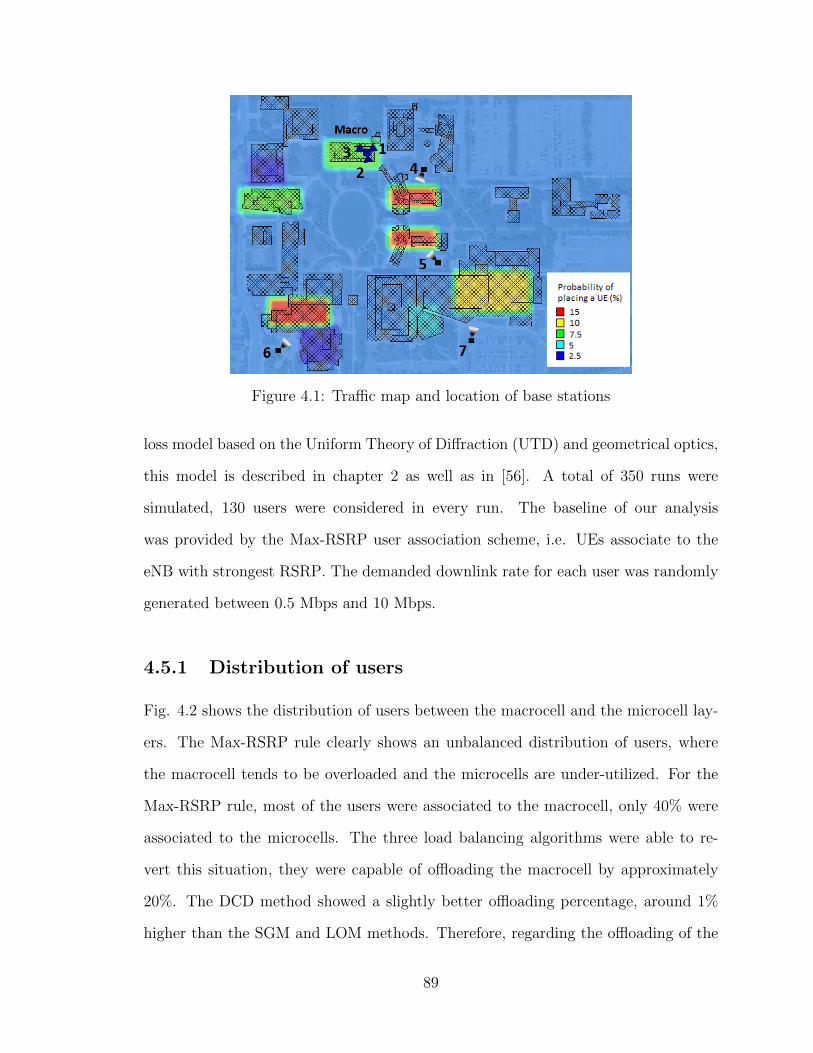
Figure 4.1: Traffic map and location of base stations
loss model based on the Uniform Theory of Diffraction (UTD) and geometrical optics,
this model is described in chapter 2 as well as in [56]. A total of 350 runs were
simulated, 130 users were considered in every run. The baseline of our analysis
was provided by the Max-RSRP user association scheme, i.e. UEs associate to the
eNB with strongest RSRP. The demanded downlink rate for each user was randomly
generated between 0.5 Mbps and 10 Mbps.
4.5.1 Distribution of users
Fig. 4.2 shows the distribution of users between the macrocell and the microcell lay-
ers. The Max-RSRP rule clearly shows an unbalanced distribution of users, where
the macrocell tends to be overloaded and the microcells are under-utilized. For the
Max-RSRP rule, most of the users were associated to the macrocell, only 40% were
associated to the microcells. The three load balancing algorithms were able to re-
vert this situation, they were capable of offloading the macrocell by approximately
20%. The DCD method showed a slightly better offloading percentage, around 1%
higher than the SGM and LOM methods. Therefore, regarding the offloading of the
89

0
10
20
30
40
50
60
70
80
Max-RSRP SGM DCD LOM
Pe
rce
nta
ge
of
use
rs
Macro Micro
Figure 4.2: Distribution of users between macrocell and microcell layers
macrocell, all three load balancing algorithms perform equally good.
4.5.2 Distribution of the load among eNBs
The distribution of users per layer in a HetNet is not enough to measure the effective-
ness of the load distribution among eNBs, especially in the case where the demand of
all users is not assumed constant. It is important to quantify how fair is the sharing
of the load between base stations. This can be done with the calculation of the Jain’s
fairness index F (L). Where L = [LD1 , . . . , LD
NB]T is a vector containing the load indexes
of the NB base stations in the network. The fairness index is calculated according to:
F (L) =
(∑j∈J LD
j
)2NB ·
∑j∈J
(LD
j
)2 (4.19)
The fairness index F (L) takes the maximum value of 1, under the idealistic situation
where the total load is equally shared by all base stations.
Fig. 4.3 shows the results. The Max-RSRP rule showed the lowest value of the
fairness index, reaching only 0.6, this indicates a poor distribution of the load. On the
other hand, the load balancing algorithms achieved a fairer load sharing among base
stations since the value of the fairness index was increased above 0.8. In particular,
90
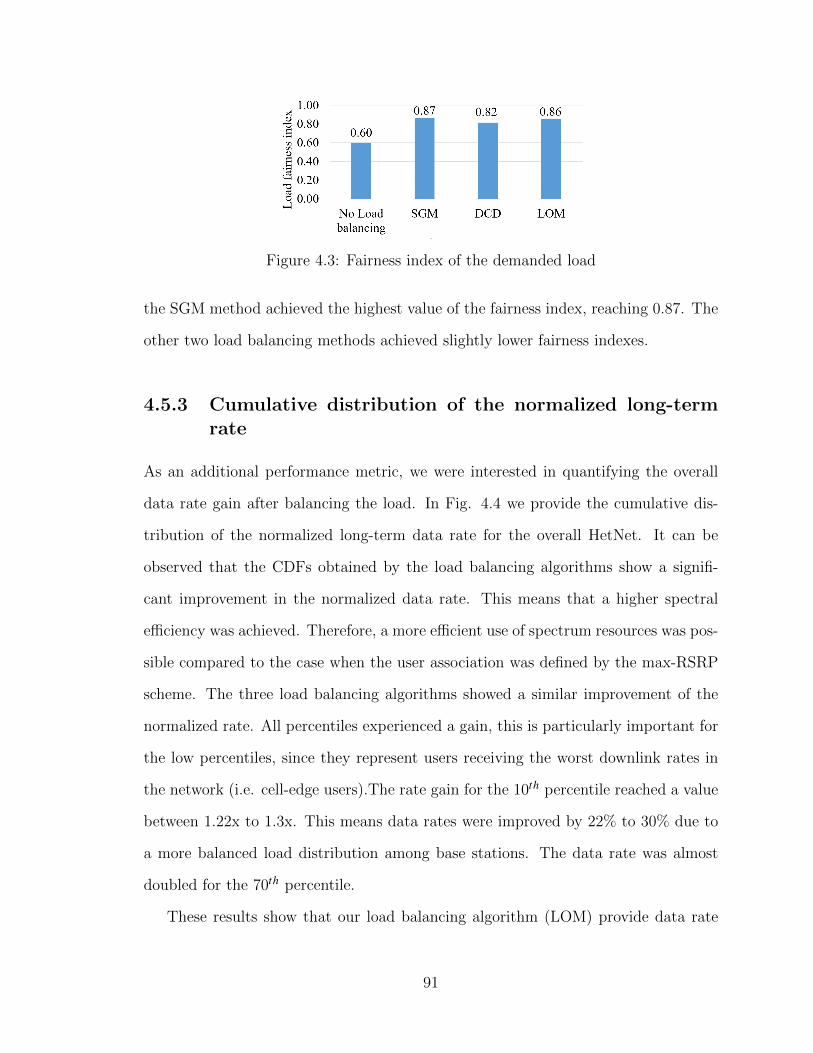
Figure 4.3: Fairness index of the demanded load
the SGM method achieved the highest value of the fairness index, reaching 0.87. The
other two load balancing methods achieved slightly lower fairness indexes.
4.5.3 Cumulative distribution of the normalized long-termrate
As an additional performance metric, we were interested in quantifying the overall
data rate gain after balancing the load. In Fig. 4.4 we provide the cumulative dis-
tribution of the normalized long-term data rate for the overall HetNet. It can be
observed that the CDFs obtained by the load balancing algorithms show a signifi-
cant improvement in the normalized data rate. This means that a higher spectral
efficiency was achieved. Therefore, a more efficient use of spectrum resources was pos-
sible compared to the case when the user association was defined by the max-RSRP
scheme. The three load balancing algorithms showed a similar improvement of the
normalized rate. All percentiles experienced a gain, this is particularly important for
the low percentiles, since they represent users receiving the worst downlink rates in
the network (i.e. cell-edge users).The rate gain for the 10th percentile reached a value
between 1.22x to 1.3x. This means data rates were improved by 22% to 30% due to
a more balanced load distribution among base stations. The data rate was almost
doubled for the 70th percentile.
These results show that our load balancing algorithm (LOM) provide data rate
91
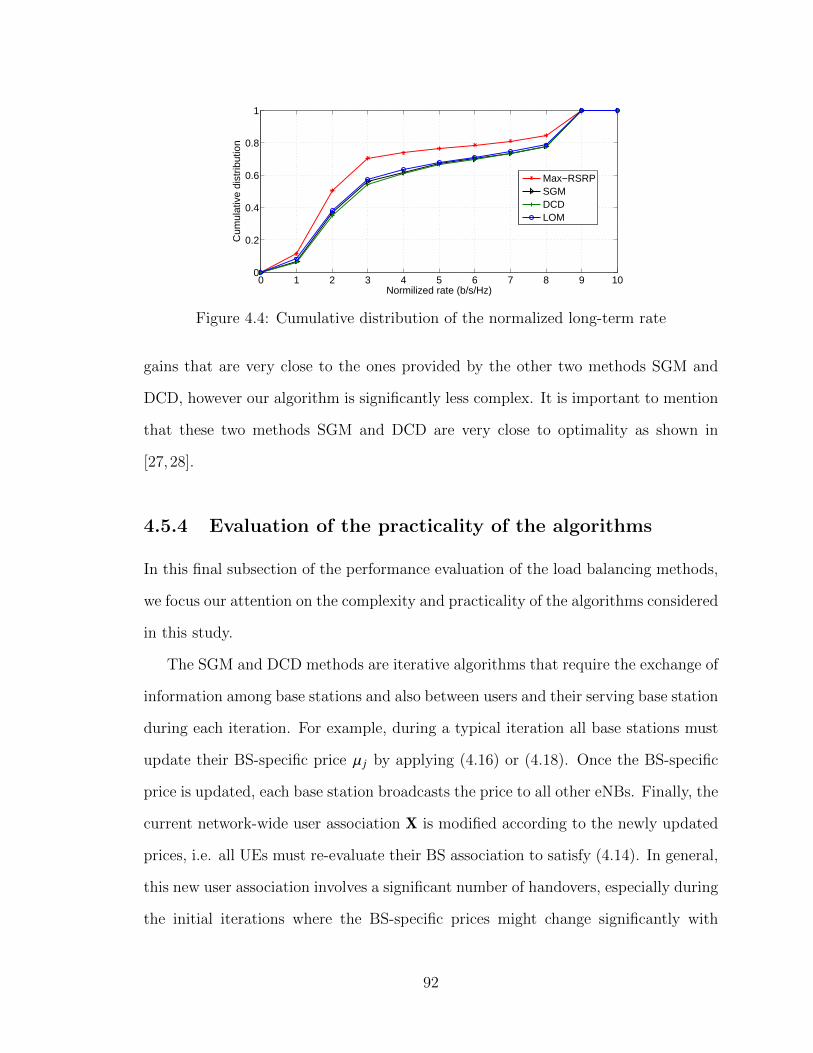
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
Normilized rate (b/s/Hz)
Cum
ulat
ive
dist
ribut
ion
Max−RSRPSGMDCDLOM
Figure 4.4: Cumulative distribution of the normalized long-term rate
gains that are very close to the ones provided by the other two methods SGM and
DCD, however our algorithm is significantly less complex. It is important to mention
that these two methods SGM and DCD are very close to optimality as shown in
[27,28].
4.5.4 Evaluation of the practicality of the algorithms
In this final subsection of the performance evaluation of the load balancing methods,
we focus our attention on the complexity and practicality of the algorithms considered
in this study.
The SGM and DCD methods are iterative algorithms that require the exchange of
information among base stations and also between users and their serving base station
during each iteration. For example, during a typical iteration all base stations must
update their BS-specific price µ j by applying (4.16) or (4.18). Once the BS-specific
price is updated, each base station broadcasts the price to all other eNBs. Finally, the
current network-wide user association X is modified according to the newly updated
prices, i.e. all UEs must re-evaluate their BS association to satisfy (4.14). In general,
this new user association involves a significant number of handovers, especially during
the initial iterations where the BS-specific prices might change significantly with
92

respect to the previous iteration.
The SGM and DCD methods require the exchange of at least m(NB+NU ) messages
where m is the number of iterations [27]. On the other hand, our load balancing
algorithm only requires each base station to broadcast its demanded load index. An
overloaded base station would proceed to execute Algorithm 4.1 and select the UEs
that would be transfered to lightly loaded base stations (i.e. set Tj), at this point only
UEs currently associated with overloaded base stations would be handed over, there
is no need to update the network-wide user association as it is done in every iteration
of the SGM and DCD methods. Therefore, our load balance algorithm requires the
exchange of NB +∑
j∈J |Tj | messages.
Fig. 4.5 shows the average number of additional exchanged messages due to
the application of the load balancing algorithms. The SGM method requires an
extraordinary amount of exchanged messages due to the fact that its convergence
is slow, as opposed to the DCD method. Our load balancing algorithm requires
a small amount of exchange of messages among base stations, this leads to lower
levels of required coordination and lower impact on the signaling load of the network.
Furthermore, our algorithm would have a reduced impact on power consumption
as opposed to the DCD and SGM methods. Therefore, it is evident that in terms
of practicality as well as impact on power consumption, our algorithm is superior.
Additionally, with a lower number of triggered handovers the effects on user experience
are reduced.
4.6 Summary
In this chapter, we propose a novel and practical load balancing algorithm based
on local maximization of the sum of the utilities. Furthermore, we carried out the
evaluation of the performance of our load balancing algorithm through a comparative
93
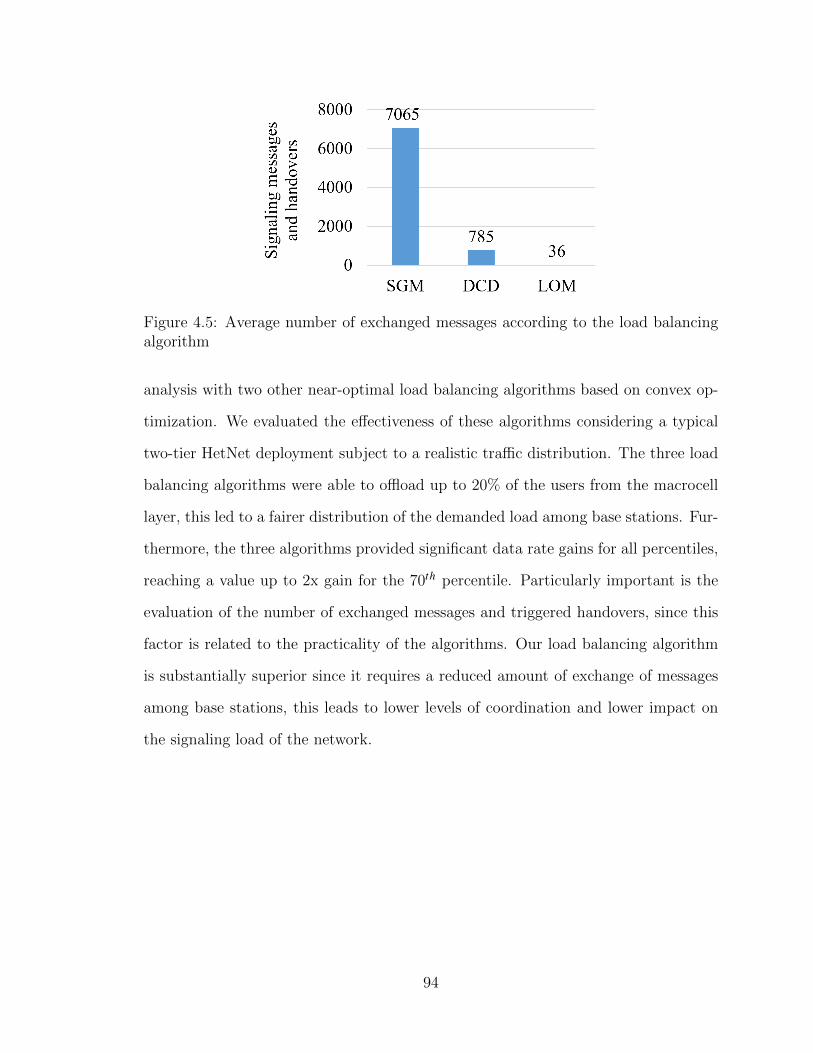
Figure 4.5: Average number of exchanged messages according to the load balancingalgorithm
analysis with two other near-optimal load balancing algorithms based on convex op-
timization. We evaluated the effectiveness of these algorithms considering a typical
two-tier HetNet deployment subject to a realistic traffic distribution. The three load
balancing algorithms were able to offload up to 20% of the users from the macrocell
layer, this led to a fairer distribution of the demanded load among base stations. Fur-
thermore, the three algorithms provided significant data rate gains for all percentiles,
reaching a value up to 2x gain for the 70th percentile. Particularly important is the
evaluation of the number of exchanged messages and triggered handovers, since this
factor is related to the practicality of the algorithms. Our load balancing algorithm
is substantially superior since it requires a reduced amount of exchange of messages
among base stations, this leads to lower levels of coordination and lower impact on
the signaling load of the network.
94
Chapter 5
Classification of user trajectories inHetNets using
unsupervised-shapelets andmulti-resolution wavelet
decomposition
The classification of user trajectories in heterogeneous networks is investigated in
this chapter. We propose a methodology to classify users trajectories based on the
measurement reports submitted to the serving base station as part of the handover
process, we propose to consider each measurement report as a time series. This
methodology allows base stations to automatically and autonomously discover the
RF conditions of their cell-edge (e.g. signal strength degradation and interference
levels). We propose the application of machine learning and data mining techniques
to identify patterns in the RSRP measurement reports submitted by users as they
approach the edge of the service area. Our time series clustering algorithm based on
unsupervised-shapelets and multi-resolution wavelet decomposition provided superior
performance compared to a DFT-based clustering algorithm. Our algorithm was able
to provide clustering results with an average accuracy of 95%. Furthermore, the
quality measure of the resulting clusters was up to 75% better compared to the
clustering results provided by the DFT-based algorithm. We also proposed a novel
methodology to calculate a suitable number of clusters without any prior knowledge
regarding the data, an average accuracy close to 90% was achieved.
95
5.1 Introduction
HetNets are particularly useful and a cost-effective solution to provide high quality
service to traffic hotspots. However, the optimization of handover parameters in
HetNets is a challenging task for network operators, due to the combination of low
power and high power base stations. It is essential for operators to properly set up
mobility management parameters to guarantee the continuity of service as users move
between coverage areas.
The handover (HO) procedure is controlled by a set of multiple parameters, whose
optimization is highly dependent on the RF conditions at the cell-edge. In certain
situations, it might be preferred to execute an HO faster due to rapidly degrading
RF conditions as users approach the cell-edge in order to avoid a radio link failure.
In other situations, it might be better to delay the execution of the HO to avoid
unnecessary handovers due to a fluctuation of the signal from the base station (eNB)
during a short period. Therefore, the conditions of the cell-edge (e.g. signal strength,
interference level) and user behavior (e.g. user speed) determine the proper set of
HO parameters for optimal operation.
Determining the RF conditions at the cell-edge is challenging in HetNets, since
the geographical location of users is usually not available in LTE systems. Therefore,
base stations do not know precisely where their users are located or the direction of
their movement, particularly in indoor environments.
In this study, we propose the use of Reference Signal Received Power (RSRP)
measurements reported by users to identify archetypal movements of mobiles as they
leave the service area of a small cell in an indoor environment. This identification is
carried out by the application of machine learning and data mining techniques.
Consider a picocell system providing service in a food court area of a university
campus, the movement of users entering and leaving the building is somewhat pre-
96

defined, in the sense that people walk along hallways and leave the building through
doors whose positions remain unchanged. Therefore, users following similar trajecto-
ries will report RSRP measurements that are highly correlated, and this information
can be used to identify the RF propagation conditions that those users are subject to
as they move. Furthermore, this information can be used to predict the RF propaga-
tion conditions that future users, which will also follow those archetypal trajectories,
will be subject to as well.
We have identified three main areas where the classification of user trajectories in
HetNets can provide essential benefits: 1) cell-edge characterization, 2) Mobility Ro-
bustness Optimization (MRO) in the context of self-optimizing networks (SON) and
3) load balancing. We briefly describe these applications in the following subsections.
5.1.1 Cell-edge characterization
In order to increase the capacity of their macro-only network, many operators deploy
small cells to provide service to traffic hotspots located indoors. In such scenario,
the area surrounding the building is typically serviced by high power macrocells.
Therefore, the cell-edge of the small cells tend to be subject to different interference
levels according to the relative location of the macrocell tower with respect to the
building [46]. The signal of the macrocell might be stronger in certain areas of the
buildings. This essentially leads to uneven interference levels at the cell-edge of the
small cells. This situation makes the tuning of HO parameters (e.g. time-to-trigger)
very challenging. If one unique set of HO parameters is applied, then these param-
eters could be too conservative for those cell-edge users subject to higher levels of
interference (leading to too late HOs) or too aggressive for those suffering lower levels
of interference (leading to ping-pong events). The identification of the RF propaga-
tion conditions at the cell-edge of small cells, can provide the necessary information
97
to optimally tune the HO parameters.
5.1.2 Mobility robustness optimization in SON
In the context of SON, the MRO function is intended to automate the adjustment of
HO parameters based on current loading conditions and the presence of neighboring
cells. It is expected that in the coming years, operators will have to increase the
densification of their small cell deployments in order to keep up with service demand.
This is especially relevant in indoor environments where picocells and even micro-
cells are being largely deployed nowadays, and it could be cumbersome for operators
to manually deal with the setting of HO parameters every time a new small cell is
installed. With the MRO functionality, the optimization of HO parameters should oc-
cur automatically. Therefore, if base stations are able to determine the RF conditions
of their cell-edges on a cell-pair basis, they will be able to autonomously cooperate
and define the best set of HO parameters that guarantee continuity of service as users
move between coverage areas.
5.1.3 Load balancing optimization
HetNets are deployed to offload the already congested macrocells, therefore it is es-
sential to properly balance the load between tiers in a HetNet system. If base stations
are able to predict when users are about to approach their cell-edge and enter the
service area of a neighboring cell, then they can use this information to either delay
the execution of an HO or execute it earlier according to a load balancing criteria,
that considers the loading conditions of the serving and neighboring cells. In some
instances, a mobile user (UE) might receive better service if it stays connected to a
lightly loaded cell that is not necessarily its best server from a RSRP point of view.
This idea has been explored by Sas et al. in [55],where they apply machine learning
98
techniques to improve traffic steering between neighboring cells.
The rest of the chapter is organized as follows: in Sect. 5.2 a brief description of
the current work in this area is provided. In Sect. 5.3 we describe the contributions of
this chapter. In Sect. 5.4 we briefly describe the handover process and the collection
of measurement reports. In Sect. 5.5 we provide details regarding the clustering of
time series and we describe our clustering algorithm. The performance evaluation of
our approach is presented in Sect. 5.6 and we provide a summary in Sect. 5.7.
5.2 Related work
Sas et al. proposed the classification of users based on their mobility behavior in [55].
They proposed the collection of RSRP measurement reports submitted by a limited
set of users, labeled as “reference users”, as they move along the service area of a
homogeneous network with multiple macrocells. Their objective was to match the
RSRP measurement reports from new users to those reports previously collected from
the reference users. The matching is carried out by applying a modified version of
the well-known Dynamic Time Warping (DTW) algorithm. If a user is matched to
one of the reference reports, then it is assumed that this user will follow the same
trajectory as the matched reference user. To the best of our knowledge, this is the
only attempt to identify user trajectories based on measurement reports currently in
the literature.
Our approach is much more comprehensive in the sense that, without any prior
knowledge on the number of possible user trajectories, we propose the use of a clus-
tering algorithm to identify typical user movements, instead of just selecting as a
reference the measurement reports from a single user as it is done in [55]. We ap-
ply machine learning and data mining techniques to automatically identify patterns
99
in the measurement reports submitted by multiple users. We use such patterns to
cluster the measurement reports and identify the RF propagation conditions that
users, following such archetypal trajectories, are subject to. The authors in [55] only
treated the problem of matching measurement reports to a reference. Furthermore,
we extend this idea to the case of heterogeneous networks, in particular small cells
providing coverage in indoor environments.
5.3 Contributions
The contributions of the work described in this chapter can be summarized in three
main points:
1. Our approach is intended to provide base stations with a mean to automatically
and autonomously discover the RF conditions (e.g. signal levels and interfer-
ence) that their users are subject to as they move through the cell-edge. For
this purpose we propose the use of machine learning and data mining techniques
to identify such patterns in the RSRP measurement reports submitted by users
as part of the handover process.
2. We propose a novel time series clustering algorithm based on shape similarity
to identify and classify such patterns. We propose to apply a shape-based tech-
nique called unsupervised-shapelets combined with a multi-resolution wavelet
decomposition analysis.
3. We propose a novel methodology to automatically determine a suitable number
of clusters without any prior knowledge about the data being classified. This
will allow base stations to identify any number of patterns in the measurement
reports submitted by users without any previous knowledge. This is a relevant
contribution due to the fact that the identified patterns can change with time
100

as the conditions of the network change (e.g. a new small cell is deployed
nearby). Therefore, the base station can automatically discover the number of
new patterns subject to the changing network conditions.
5.4 Handovers and RSRP measurement reports in
LTE/LTE-A systems
In this study we focused on the hard handover process in 3GPP LTE/LTE-A systems
for UEs in connected state (i.e. mobiles actively receiving and sending data to their
serving eNB). The handover procedure consists of four main phases [83]: measure-
ment, processing, preparation, and execution. UEs continuously monitor the received
signal strength from their serving eNB (SeNB) and the RSRP from their neighboring
cells. This is typically carried out by measuring the RSRP levels (UEs can also mon-
itor the signal quality in terms of the Reference Signal Received Quality - RSRQ).
The measurements values gathered by the UEs are further processed to remove the
effects of fading, this is done by averaging and filtering the measurements at two
different layers L1 (physical) and L3 (network). At the L1 layer, the UE collects
several RSRP values during an interval period defined by the network operator (e.g.
one sample every 40 ms during a period of 200 ms) and an L1 sample is generated
by linearly averaging the collected RSRP values. At the L3 layer, the L1 samples are
then averaged through a first-order infinite impulse response (IIR) filter according to
(5.1), a process known as L3-filtering.
Fn = (1 − a)Fn−1 + aMn (5.1)
Where Mn is the latest L1 sample, Fn is the updated filtered L3 sample, Fn−1 is
the previous filtered L3 sample and a is defined as [83]:
a =1
2k/4 (5.2)
101
Where k is known as the L3-filter coefficient and it is set by the network operator.
We will refer to the L3 samples simply as RSRP samples. UEs send measurement
reports to their SeNB whenever certain conditions regarding the RSRP samples occur.
These conditions, or events, are standardized and set up by the network operator.
There are several events that can trigger the report of RSRP measurements, named
events A1 through A6. A detailed description of these events can be found in [83]. In
our study we focused on the A2 event for intra-carrier HOs. The entry condition for
the A2 event occurs when the RSRP samples of the SeNB becomes worst than certain
threshold (A2 threshold). A hysteresis parameter is also applied to avoid unnecessary
triggering of the event due to rapid fluctuations of the RSRP samples. Once the entry
condition is satisfied, it has to remain valid for a certain period before the UE submits
the measurement report to the SeNB. This period is called time-to-trigger (TTT) and
it can take values from 40 ms up to 5120 ms. The A2 threshold, hysteresis, TTT and
L3-filter coefficient k are fundamental parameters that control the HO process. These
parameters need to be optimized by network operators for specific network conditions
in order to guarantee the continuity of service as users move between coverage areas
(i.e. to reduce HO failures).
HO failures typically occur when the HO event is executed too late (i.e. a radio
link failure occurs before the HO is completed). A reduction of the TTT helps reduce
too late HO failures since the HO is executed faster. However, a small TTT increases
the chances of ping-pong events (i.e. UE is handed over back and forth from SeNB
and the target eNB over a short period), this is undesirable since it increases the
signaling load in the network due to unnecessary HO operations. HO parameters
can also be setup at the cell-pair level, this is especially useful in HetNets since the
cell-edge conditions for small cells are highly irregular, as pointed out in Sect. 5.1,
and a single set of HO parameters for all cells might not provide optimal results.
In this study, we consider the set of RSRP samples submitted to the SeNB (i.e.
102
the measurement report) as a time series that can be used to identify archetypal
movements of users in indoor environments. As pointed out in [55], users that move
along similar trajectories will provide measurement reports that are highly correlated
with each other. Therefore, we propose to automatically identify patterns that will
allow the base station to determine the typical RF conditions as users approach the
cell-edge. In order to identify such patterns, we propose the use of machine learning
and data mining techniques, this includes the clustering of a collection of time series.
Details regarding time series and their clustering are provided in the next section.
5.5 Clustering of time series
A time series is an ordered sequence of real-valued data, usually recorded at regular
time intervals. We define a time series of length m as Ti = Ti1,Ti2, . . . ,Tim. A collection
of N time series is defined as the set T = {T1,T2, . . . ,TN }, the time series in T need not
have the same length. Each time series Ti is associated with a class (or cluster) label,
the time series sharing similar features or attributes form a class, i.e. are associated
with the same class label. The problem of clustering the time series in T consists
of finding a function that maps from the space of time series to the space of class
values [86].
A similarity measure is required in order to classify a set of time series T, a suitable
similarity measure is able to effectively discriminate among time series and facilitates
the classification. In some cases, similarity in time is suitable to classify the data,
while other problems require a similarity measure based on shape. Therefore, the
selection of the similarity measure depends on the domain of the problem at hand.
In our study, each time series is a collection of RSRP measurements gathered by a
single UE in connected mode. Our premise is that those users moving along similar
trajectories, at approximately the same speed, should generate time series with similar
103

shape. Hence, we focused on studying the clustering of time series with a shape-based
similarity measure.
Shaped-based similarity measures determine the level of similarity between two
time series by comparing their individual values. The most popular examples of this
type of measure are the Euclidean distance and Dynamic Time Warping (DTW) [87].
The Euclidean distance has become widely used in data mining applications not
only due to its simplicity, but also because experimental evaluations have proven its
accuracy as a similarity measure [88]. The Euclidean distance between two series Ti
and Tj with equal length m, is given by:
D(Ti,Tj ) =
√√ m∑k=1
(Tik − Tj k
)2(5.3)
The lower the value of D(Ti,Tj ), the more similar the two time series. Note that for
the Euclidean distance to be invariant to scale, the time series need to be z-normalized
first (i.e. both time series must have zero mean and unit variance). The Euclidean
distance can only be applied to compare two time series with the same length and
time alignment. DTW was proposed as an alternative method to compare time series
with different time lengths and not aligned in time [55], with the disadvantage of
being a computationally expensive method.
In our study, we propose the use of the time series obtained from the measurement
of RSRP values to identify typical trajectories (or archetypal movements) of users in
indoor environments, e.g. users moving along a hallway and leaving the building at a
particular exit. Multiple users, moving along similar trajectories, will generate similar
time series that belong to the same class.
The main challenge is to effectively cluster such set of time series with no prior
knowledge regarding the number of classes. Furthermore, the time series to be clus-
tered do not have the same length in general. Therefore, the simple application of
the Euclidean distance to classify T is not suitable for our application and a more
104
sophisticated technique is required.
Our objective is to exploit local similarities in shape among time series, e.g. a
sharp drop in RSRP values due to the presence of a concrete wall as users leave the
service area of an in-building system. Such drop in RSRP values should be highly
correlated among users walking along the same path. This type of local similarity
in shape can provide the necessary information to classify the time series. For this
reason, we apply a technique called shapelets, proposed originally by Ye and Keogh in
[89]. Shapelets are specifically intended to identify local shape features (i.e. patterns)
that contain enough information to discriminate among time series. In the next
section we briefly provide details about the definition of shapelets and their use for
clustering of time series.
5.5.1 Shapelets
A shapelet is defined as a subsequence of one time series in T [86]. A subsequence
s of length l is defined as a subset of l consecutive values from a time series. A
shapelet is selected in such a way that it captures a distinctive shape feature that is
common in a class of time series. Shapelets can be found via exhaustive search, where
every possible subsequence of each time series in T is a candidate to be selected as a
shapelet [89]. However, this process is time consuming, more efficient techniques for
shapelet generation have been proposed [86,90].
The process of discovering shapelets for clustering of time series involves three
main stages: generation of candidates, measure the similarity between a candidate and
the time series in the set, and finally, the assessment of the quality of the candidate.
Regarding the generation of shapelet candidates, it is necessary to define the length
of the candidate subsequences first. Typically, subsequences with lengths between
predefined values lmin and lmax are considered. If exhaustive search is used to generate
105
shapelet candidates, then all possible subsequences with lengths between lmin and lmax
are extracted from the time series in T. This process is slow and inefficient for large
sets of time series with long lengths. Instead of applying an exhaustive search to
generate shapelets, we apply the algorithm proposed by Zakaria et al. in [90] with
slight variations to accommodate the fact that we deal with time series with different
lengths.
In [90], the authors proposed the use of unsupervised-shapelets to cluster time
series. We briefly describe the algorithm in the next subsection.
5.5.2 Generating unsupervised-shapelets
According to the authors in [90], shapelets can be generated iteratively. In the first
iteration, the algorithm looks for a candidate subsequence s capable of separating the
set of time series T in two distinct subsets, namely DA and DB, such candidate can
be used as a shapelet. The subset DA corresponds to the time series that contain a
similar pattern as the candidate s. The subset DB corresponds to the rest of the time
series which do not contain the pattern. Therefore, in the next iteration, to generate
a shapelet candidate it is only necessary to evaluate subsequences from any of the
time series in DB. With every new generated shapelet, the number of time series in
DB decreases, this avoids the need for an exhaustive search and speeds up the process
of generating shapelets.
In order to evaluate the capacity of a candidate subsequence s to discriminate the
time series in T, a similarity measure between the subsequence s of length l and a
time series T of length m has to be defined first. In [90], this similarity measure is
called subsequence distance sD(s,T ) and it is defined as:
sD(s,T ) = mini∈{1,m−l}
D(s, ti,l ) (5.4)
106

Where ti,l is a subsequence of T that contains l values of T starting from the
ith value, with l < m. According to (5.4), a low sD(s,T ) indicates a high level of
similarity between the time series T and the subsequence s.
As it was pointed out before, a candidate subsequence is selected as a shapelet
based on its discriminative power, which is measured by how much distinct the subsets
DA and DB are. This corresponds to the quality assessment of the candidate shapelet.
To generate the subsets DA and DB, first all distances sD(s,Ti) between a candidate
subsequence s and the time series in T are calculated. This step, maps each time
series in T to the real value obtained with (5.4), i.e. a one dimensional feature space.
The set of the values sD(s,Ti) form a set defined as Dist(s). In [90], a greedy search
algorithm is applied to separate the set of values in Dist(s) in two clusters, i.e. the
subsets DA and DB.
The discriminative power of the candidate subsequence s is determined by how
much apart the elements in DA are from the elements in DB in the feature space.
This is measured by a quantity defined as the gap:
gap = µB − σB −(µA − σA
)(5.5)
Where µB and µA are the mean of the subsequence distances between s and
the time series in DA and DB respectively and, σB and σA are the corresponding
standard deviations. The higher the gap, the higher the discriminative power of the
subsequence s.
In the algorithm proposed in [90], the initial set of candidate subsequences is
generated from time series T1. This means, all subsequences with lengths between
lmin and lmax are extracted from T1 and their associated gap is calculated with (5.5).
Let sh1 be the first shapelet to be selected. The shapelet sh1 corresponds to the
subsequence with the highest quality, i.e. the highest value of the gap. The next set
of candidate subsequences is generated from a time series in the subset DB (where DB
107
which was obtained when sh1 was selected as shapelet), and the process is repeated
to generate the second shapelet. The procedure is repeated until there are no more
time series in the corresponding subset DB.
We refer the reader to [90] for additional details of the algorithm to generate
unsupervised-shapelets.
5.5.3 Clustering using unsupervised-shapelets
After generating a set of shapelets, the next step is to use them to cluster all the time
series in T. This is done by creating a new feature space with the so-called shapelet
transformation [86].
The shapelet transformation consists in mapping every time series Ti ∈ T to a
n-dimensional vector, known as the feature vector. Where n is the number of gener-
ated shapelets and every entry of the feature vector corresponds to the subsequence
distance between the time series Ti and each shapelet. Consider the set S containing
the n generated shapelets, i.e. S = {sh1, sh2, . . . , shn}, the feature vector fi associated
with time series Ti, is given by:
fi = [sD(sh1,Ti), sD(sh2,Ti), . . . , sD(shn,Ti)] (5.6)
With (5.6), each one of the N time series in T is mapped to a feature vector.
The collection of the N feature vectors can now be used as the input to a clustering
algorithm. In our study we applied the popular K-means algorithm. This algorithm
was proposed in 1967 by McQueen in [91] and due to its simplicity it has become one
of the most popular clustering algorithms in the data mining community.
The K-means algorithm classifies the feature vectors in the n-dimensional space
into K different clusters, where the number of clusters is known a priori. The algo-
rithm consists of four main steps:
108
1. Define the position of K points in the n-dimensional space, these points will serve
as the centroids of the K clusters (random positions are typically selected)
2. Assign each feature vector to the centroid with smallest Euclidean distance
3. Recalculate the centroids of each cluster based on the assignment done in step
2.
4. Repeat steps 2 and 3 until the centroids do not change
Notice that the K-means algorithm requires the number of clusters to be known a
priori. In our application, the base stations do not know how many different archety-
pal trajectories can be identified a priori. To overcome this situation, we have devel-
oped a methodology to automatically determine the number of clusters without prior
knowledge. This methodology in described in Sect. 5.5.6.
5.5.4 Wavelets and multi-resolution analysis
In our study, we consider time series that are generated by the RSRP measurement re-
ports submitted by UEs to their serving base station. The RSRP measurement values
typically change abruptly over short periods, this is due to the rapidly changing prop-
agation conditions of reference signals as the mobiles move along certain trajectory.
Furthermore, RSRP measurements are usually subject to noise that makes even more
difficult the clustering of the resulting time series, in particular when shape-based
similarity measures are applied, e.g. shapelets.
In order to improve the robustness and accuracy of the clustering method de-
scribed in Sect. 5.5.3, we propose the combination of a multi-resolution wavelet de-
composition analysis with the unsupervised-shapelets technique. Most of the abrupt
variations in RSRP measurements as well as the noise present in the measurements
109
are captured by a high resolution approximation of the time series, whereas its fun-
damental shape is captured by a low resolution approximation. The application of
multi-resolution wavelet decomposition allow us to perform the clustering of time se-
ries starting from low resolution levels (coarse approximation of the data), where most
of the noise and abrupt changes in RSRP measurements do not significantly alter the
shape of the time series, and we incrementally increase the resolution of the approxi-
mation of the time series to refine the output of the clustering algorithm. To the best
of our knowledge, this is the first time that shapelets and wavelet decomposition are
combined for the clustering of time series.
Multi-resolution wavelet analysis has been widely applied for image compression
and other signal processing techniques [92]. More recently, wavelet-based clustering
algorithms have also been proposed [93]. Wavelets are mathematical functions used
to represent data or other functions at different levels of resolution [92]. The discrete
wavelet analysis procedure consists of selecting a prototype function, also known as
the mother wavelet, and expressing the data of interest in terms of averages and
differences of the mother wavelet. Since wavelets are localized in time, they are
capable of capturing levels of details from the data at different scales of resolution.
This represents an advantage compared to Fourier analysis that is only able to capture
global characteristics of the data.
In our study, we propose the use of the Haar wavelet decomposition to extract the
representation of time series with different resolution levels. Consider a time series
T , the first level of the decomposition is obtained by averaging every two adjacent
values of T . As a result, a smoother representation of T is obtained. If the length of
T is m = 2p, the length of the first decomposition of T is 2p−1.
The Haar wavelet has very important properties that makes it suitable for our
application. For example, it is simple and easy to compute, its computation requires
linear time in the length of the sequence [94]. Furthermore, it preserves the Euclidean
110

distance, as it was shown in [94] and the decomposition via the Haar wavelet allows
for perfect reconstruction.
In the next subsection we provide a description of our algorithm for clustering of
time series based on multi-resolution analysis and unsupervised-shapelets.
5.5.5 Clustering of time series with multi-resolution analysisand shapelets
Our algorithm to cluster time series is based on the principle that the clustering is
more robust when it is done iteratively starting with a low resolution approximation
of the time series and refining the clusters by considering a finer approximation of
the data in every iteration. The multi-resolution wavelet decomposition of the data
provides approximations of the time series with different levels of detail. A similar
approach was followed in [93] for an “anytime clustering algorithm” based on K-
means.
Our algorithm starts with the computation of the Haar wavelet decomposition
of all the time series in T. During the first iteration of the algorithm, the low-
est resolution approximation of each time series is considered as the input of the
unsupervised-shapelet generation algorithm described in Sect. 5.5.2. As a result, this
set of shapelets is used to cluster the lowest resolution approximation of the time se-
ries in T using the K-means algorithm. During the first iteration, the position of the
cluster centroids in the feature space are selected randomly (first step of the K-means
algorithm as described in Sect. 5.5.3).
In the second iteration, the algorithm tries to refine the clustering of time series
by considering the wavelet decomposition of the time series with the next level of
resolution. These approximations of the time series are used as the input of the
unsupervised-shapelet generation algorithm. The new set of shapelets is then used
to cluster this higher resolution representations of the time series. For the second
111
Table 5.1: Calculation of Rand index
Quantity DescriptionA number of instances in same class in Cls1 and Cls2B number of instances in different clusters in Cls1 and Cls2C number of instances in same cluster in Cls1 but not on Cls2D number of instances in same cluster in Cls2 but not on Cls1
iteration, the K-means algorithm is not initialized randomly. Instead, we use the
cluster memberships from the previous iteration to calculate the initial position of
the cluster centroids.
The resulting clusters from the previous resolution level are compared with the
clusters obtained with the higher resolution level. If the memberships of the clusters
did not change, then the algorithm stops. Otherwise, the resolution level is increased
by one level and the process is repeated. We compared the clustering results ob-
tained with two different levels of resolution by applying the well-known Rand index,
typically used as a clustering quality measure.
The Rand index RI is a number in the interval [0, 1] and it measures the similarity
between two clusterings Cls1 and Cls2. To compute the RI index, it is necessary first
to compute the quantities described in table 5.1, then the Rand index is calculated
with (5.7).
RI (Cls1,Cls2) =A + B
A + B + C + D(5.7)
The Rand index takes the value of 0 if the clusterings Cls1 and Cls2 are completely
different. It takes the value of 1, when both clusterings are identical (i.e. quantities
C and D from table 5.1 are zero).
The algorithm to cluster time series is summarized in Algorithm 5.1.
Noticed that in line 4 of Algorithm 5.1, the function
GetClusters(Data leveli, Si,Clsi−1) is executed to cluster the data’s ith level of
resolution with the corresponding set of shapelets Si and initializing the K-means
112

Algorithm 5.1 Algorithm to cluster time series based on multi-resolution analysisand shapelets
Require: Set of time series T, max. wavelet decomposition level levelmax1: for i = 1 to levelmax do2: Data leveli ← Haar (T, i)3: Si ← GenShapelets(Data leveli)4: Clsi ← GetClusters(Data leveli, Si,Clsi−1)5: if i > 1 then6: RI ← Rand Index(Clsi−1,Clsi)7: if RI = 1 then8: Return Clsi9: end if
10: end if11: end for
algorithm with the centroids from the clusters obtained in the previous iteration.
This function implements the K-means algorithm combined with our methodology
to automatically determine the number of clusters in the data. We proceed to briefly
describe this methodology in the next subsection.
5.5.6 Automatic determination of the number of clusters
Our algorithm to cluster time series is based on the popular K-means algorithm
described in Sect. 5.5.3. This algorithm requires the number of clusters K to be
known a priori. In our study, the number of clusters corresponds to the number
of different trajectories that can be identified from the RSRP measurement reports
submitted by users. We do not assume that base stations know this number a priori,
therefore we propose an algorithm to automatically determine a suitable value for K .
Typically, in data mining applications if the number of clusters is not known a
priori then a trial-and-error procedure is followed to determine a suitable number of
clusters. This procedure usually requires a subjective evaluation of the clustering
results [95], e.g. visual inspection.
A simple approach to determine the number of clusters K, consists of applying the
113
K-means algorithm for a range of values for K, say between Kmin and Kmax. Then,
apply a quality measure to determine which value of K provided the best clustering
for the data [95]. A typical metric used to measure the quality of a clustering is the
sum of the squared Euclidean distance between each data instance (i.e. each time
series) and the centroid of the cluster it was assigned to, such distance is measured in
the n-dimensional feature space. The sum of the squared Euclidean distances SSE(k)
is calculated as:
SSE(k) =k∑
j=1
Nj∑i=1
(D( fi,w j )
)2(5.8)
Where k is the number of clusters, N j is the number of data instances in the jth
cluster, fi is the feature vector associated with the ith data instance in cluster j and,
w j is the centroid of the jth cluster. If the data were correctly clustered, then it is
expected that each data instance will be located close to the centroid of its cluster
and the value of SSE(k) will be lower, as opposed to the case when the number of
clusters does not suit the data and a high value of SSE(k) is observed.
The SSE(k) metric has its maximum value when k = 1 and decreases as the
number of clusters k is increased, until the point that it takes the value of 0 when
each data instance is a cluster on its own, a situation that is not desirable. However,
the plot of SSE(k) with respect to the number of clusters k has a very characteristic
shape as shown in Fig. 5.1 (note that the SSE(k) has been normalized with respect
to SSE(1)). There is typically a maximum value for k that significantly reduces the
value of SSE(k), increasing k beyond that value does not provide any additional
benefit in the reduction of the SSE. Therefore, a suitable value for K is obtained by
finding the elbow in the curve of the SSE(k) plot. This is a heuristic method known
as the Elbow method [95]. Unfortunately, there is no clear definition for the elbow of
the curve.
A more formal approach was proposed by Pham et al. in [95], where an evalua-
114
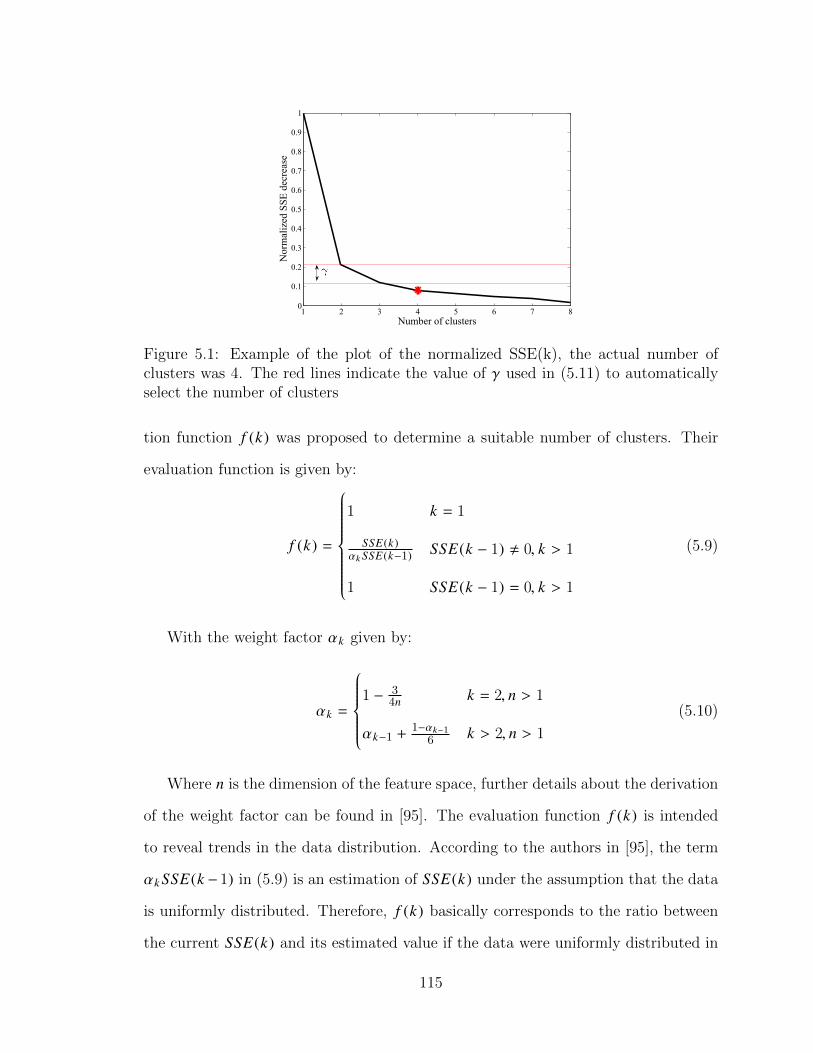
1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Number of clusters
Nor
mal
ized
SS
E d
ecre
ase
Figure 5.1: Example of the plot of the normalized SSE(k), the actual number ofclusters was 4. The red lines indicate the value of γ used in (5.11) to automaticallyselect the number of clusters
tion function f (k) was proposed to determine a suitable number of clusters. Their
evaluation function is given by:
f (k) =
1 k = 1
SSE(k)αkSSE(k−1) SSE(k − 1) , 0, k > 1
1 SSE(k − 1) = 0, k > 1
(5.9)
With the weight factor αk given by:
αk =
1 − 34n k = 2, n > 1
αk−1 +1−αk−1
6 k > 2, n > 1
(5.10)
Where n is the dimension of the feature space, further details about the derivation
of the weight factor can be found in [95]. The evaluation function f (k) is intended
to reveal trends in the data distribution. According to the authors in [95], the term
αk SSE(k − 1) in (5.9) is an estimation of SSE(k) under the assumption that the data
is uniformly distributed. Therefore, f (k) basically corresponds to the ratio between
the current SSE(k) and its estimated value if the data were uniformly distributed in
115
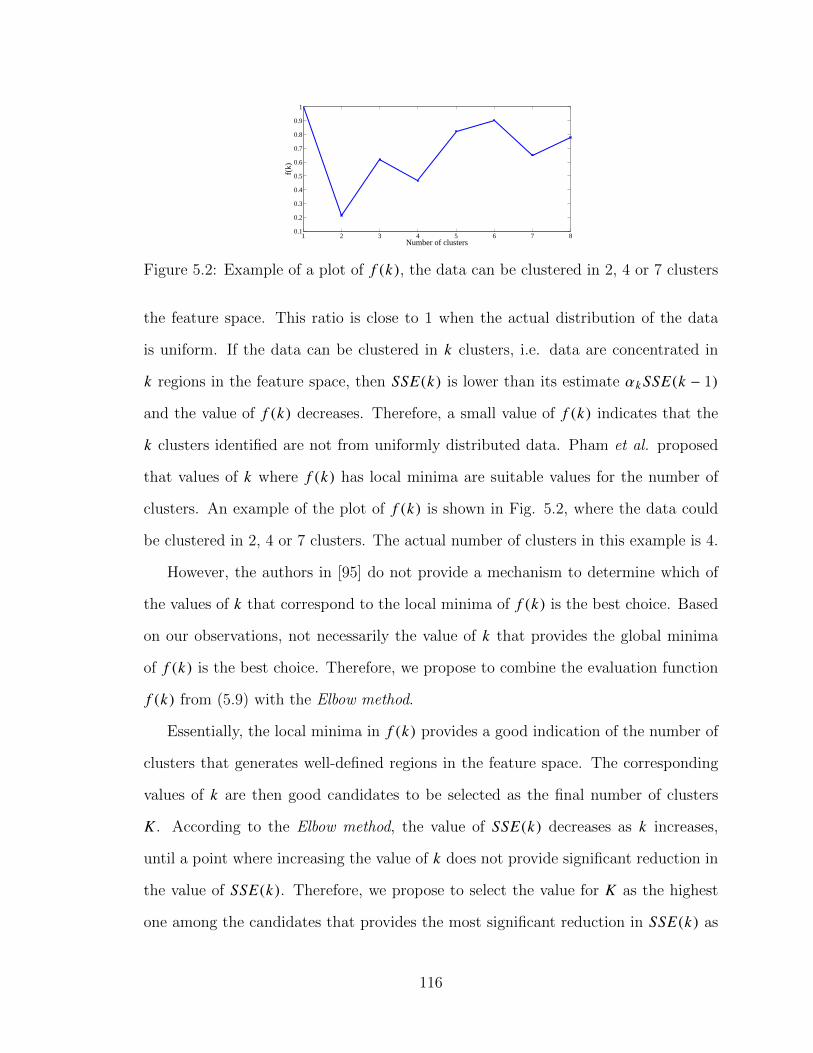
1 2 3 4 5 6 7 80.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Number of clusters
f(k)
Figure 5.2: Example of a plot of f (k), the data can be clustered in 2, 4 or 7 clusters
the feature space. This ratio is close to 1 when the actual distribution of the data
is uniform. If the data can be clustered in k clusters, i.e. data are concentrated in
k regions in the feature space, then SSE(k) is lower than its estimate αk SSE(k − 1)
and the value of f (k) decreases. Therefore, a small value of f (k) indicates that the
k clusters identified are not from uniformly distributed data. Pham et al. proposed
that values of k where f (k) has local minima are suitable values for the number of
clusters. An example of the plot of f (k) is shown in Fig. 5.2, where the data could
be clustered in 2, 4 or 7 clusters. The actual number of clusters in this example is 4.
However, the authors in [95] do not provide a mechanism to determine which of
the values of k that correspond to the local minima of f (k) is the best choice. Based
on our observations, not necessarily the value of k that provides the global minima
of f (k) is the best choice. Therefore, we propose to combine the evaluation function
f (k) from (5.9) with the Elbow method.
Essentially, the local minima in f (k) provides a good indication of the number of
clusters that generates well-defined regions in the feature space. The corresponding
values of k are then good candidates to be selected as the final number of clusters
K . According to the Elbow method, the value of SSE(k) decreases as k increases,
until a point where increasing the value of k does not provide significant reduction in
the value of SSE(k). Therefore, we propose to select the value for K as the highest
one among the candidates that provides the most significant reduction in SSE(k) as
116
shown in (5.11). Selecting a number of clusters above this number does not add any
additional information regarding the classification of the data, and selecting a value
below this number might lead to under-fitting the data.
Let Kc = {k1, . . . , kq} be the set of q values of k that corresponds to local minima
of the evaluation function f (k). We propose to select as the value of K , the element
of Kc that satisfies:
K = max {k1, . . . , kq}
s.t. ∆SSE(ki) − ∆SSE(ki−1) > γ
i ∈ {1, q}, k0 = 1
(5.11)
With ∆SSE(ki) being the relative decrease in SSE provided by clustering the data
with ki clusters with respect to SSE(1). ∆SSE(ki) is given by (5.12).
∆SSE(ki) =SSE(1) − SSE(ki)
SSE(1)(5.12)
The quantity γ in (5.11) is a threshold that determines the minimum relative
decrease in SSE that is acceptable. In our study, we have set the parameter γ to
10%, i.e. clustering the data in ki clusters must decrease the relative SSE by at least
10% compared to the the case when the data is clustered in ki−1 clusters.
In Fig. 5.1, we provide an example where the candidates for the number of clusters
are obtained from Fig. 5.2. According to Pham’s algorithm, the data can be clustered
in 2, 4 or 7 clusters. The candidate for the number of clusters that satisfies (5.11)
with γ = 10% is k = 4, since SSE(4) − ∆SSE(2) > γ as shown in the figure. The case
of k = 7 does not satisfies the condition in (5.11).
5.6 Performance evaluation
The performance evaluation of the algorithm for clustering of time series was carried
out considering an indoor microcell deployment, currently operating at the Univer-
117
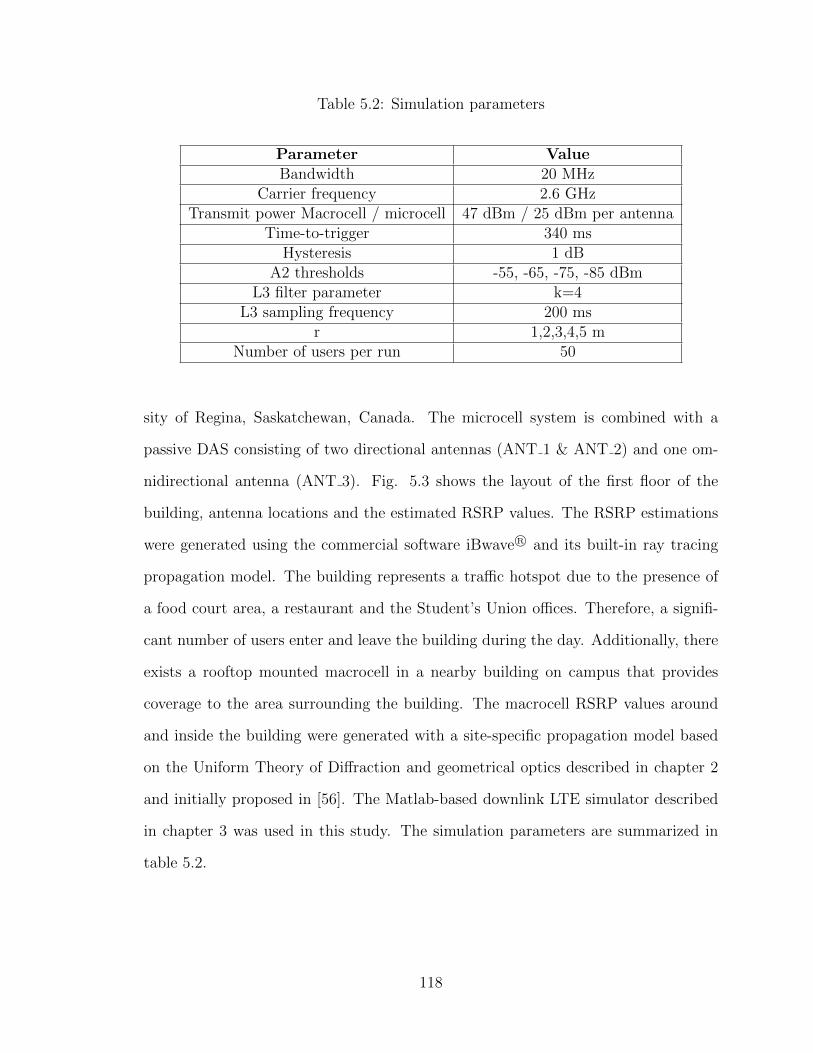
Table 5.2: Simulation parameters
Parameter ValueBandwidth 20 MHz
Carrier frequency 2.6 GHzTransmit power Macrocell / microcell 47 dBm / 25 dBm per antenna
Time-to-trigger 340 msHysteresis 1 dB
A2 thresholds -55, -65, -75, -85 dBmL3 filter parameter k=4
L3 sampling frequency 200 msr 1,2,3,4,5 m
Number of users per run 50
sity of Regina, Saskatchewan, Canada. The microcell system is combined with a
passive DAS consisting of two directional antennas (ANT 1 & ANT 2) and one om-
nidirectional antenna (ANT 3). Fig. 5.3 shows the layout of the first floor of the
building, antenna locations and the estimated RSRP values. The RSRP estimations
were generated using the commercial software iBwave R© and its built-in ray tracing
propagation model. The building represents a traffic hotspot due to the presence of
a food court area, a restaurant and the Student’s Union offices. Therefore, a signifi-
cant number of users enter and leave the building during the day. Additionally, there
exists a rooftop mounted macrocell in a nearby building on campus that provides
coverage to the area surrounding the building. The macrocell RSRP values around
and inside the building were generated with a site-specific propagation model based
on the Uniform Theory of Diffraction and geometrical optics described in chapter 2
and initially proposed in [56]. The Matlab-based downlink LTE simulator described
in chapter 3 was used in this study. The simulation parameters are summarized in
table 5.2.
118
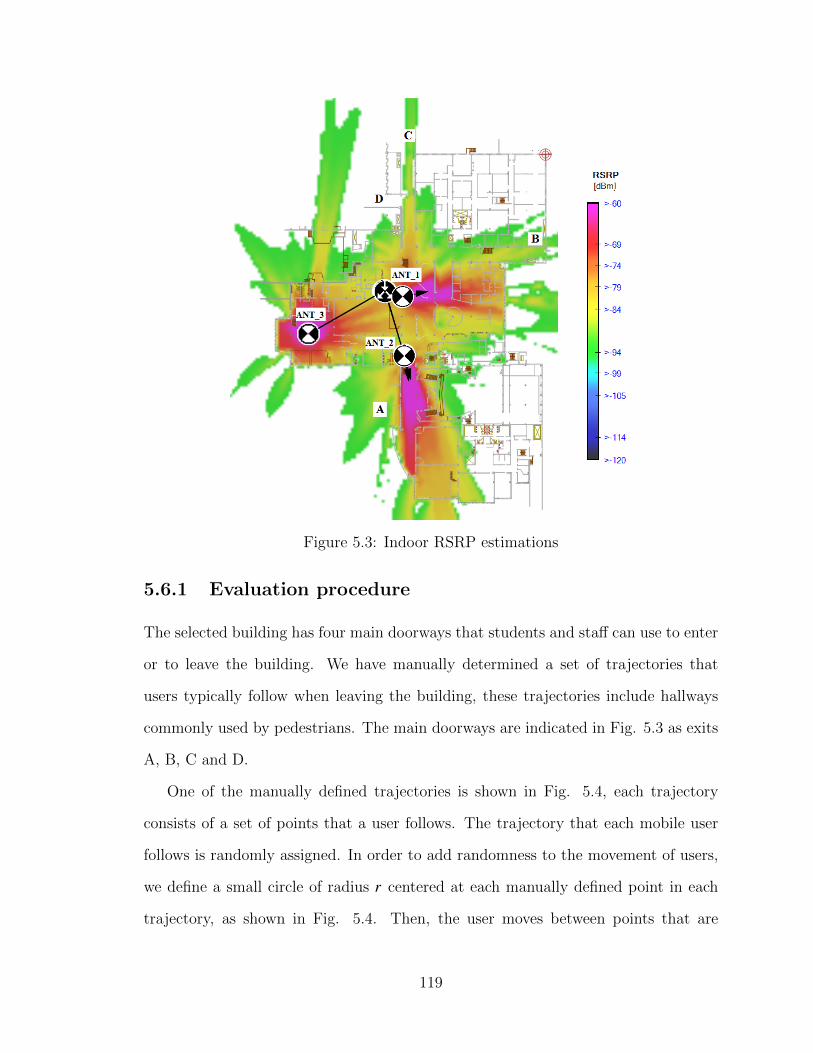
Figure 5.3: Indoor RSRP estimations
5.6.1 Evaluation procedure
The selected building has four main doorways that students and staff can use to enter
or to leave the building. We have manually determined a set of trajectories that
users typically follow when leaving the building, these trajectories include hallways
commonly used by pedestrians. The main doorways are indicated in Fig. 5.3 as exits
A, B, C and D.
One of the manually defined trajectories is shown in Fig. 5.4, each trajectory
consists of a set of points that a user follows. The trajectory that each mobile user
follows is randomly assigned. In order to add randomness to the movement of users,
we define a small circle of radius r centered at each manually defined point in each
trajectory, as shown in Fig. 5.4. Then, the user moves between points that are
119
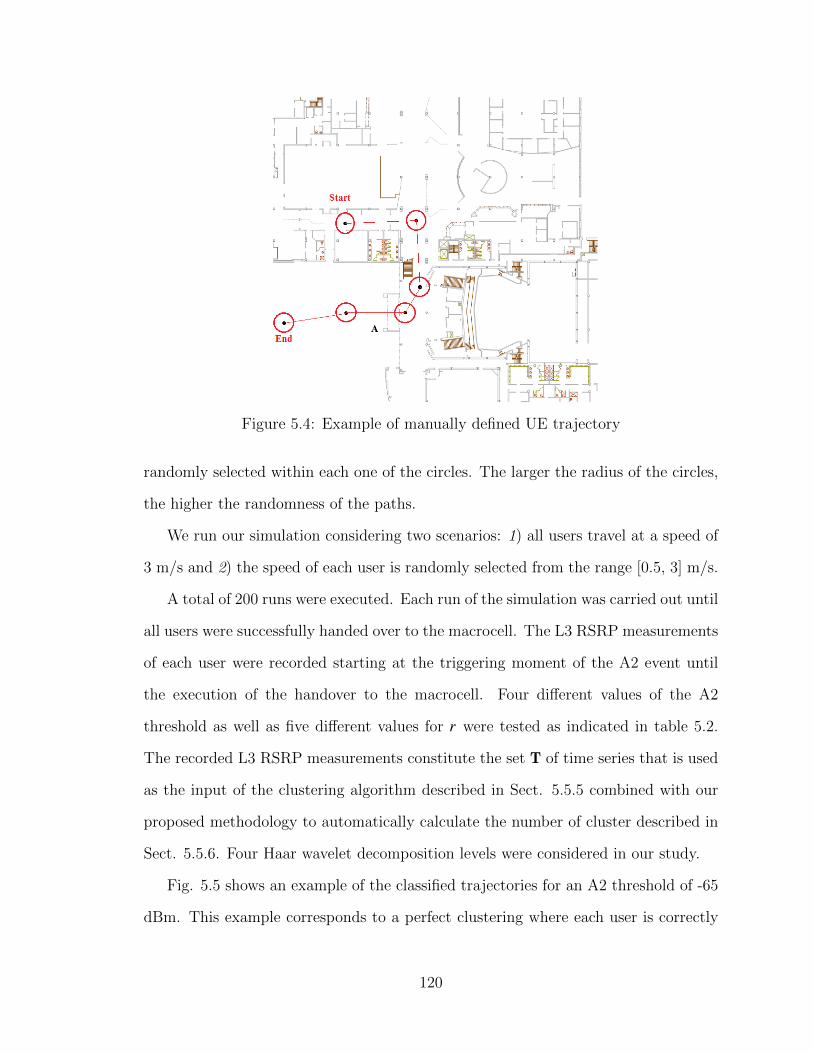
Figure 5.4: Example of manually defined UE trajectory
randomly selected within each one of the circles. The larger the radius of the circles,
the higher the randomness of the paths.
We run our simulation considering two scenarios: 1) all users travel at a speed of
3 m/s and 2) the speed of each user is randomly selected from the range [0.5, 3] m/s.
A total of 200 runs were executed. Each run of the simulation was carried out until
all users were successfully handed over to the macrocell. The L3 RSRP measurements
of each user were recorded starting at the triggering moment of the A2 event until
the execution of the handover to the macrocell. Four different values of the A2
threshold as well as five different values for r were tested as indicated in table 5.2.
The recorded L3 RSRP measurements constitute the set T of time series that is used
as the input of the clustering algorithm described in Sect. 5.5.5 combined with our
proposed methodology to automatically calculate the number of cluster described in
Sect. 5.5.6. Four Haar wavelet decomposition levels were considered in our study.
Fig. 5.5 shows an example of the classified trajectories for an A2 threshold of -65
dBm. This example corresponds to a perfect clustering where each user is correctly
120
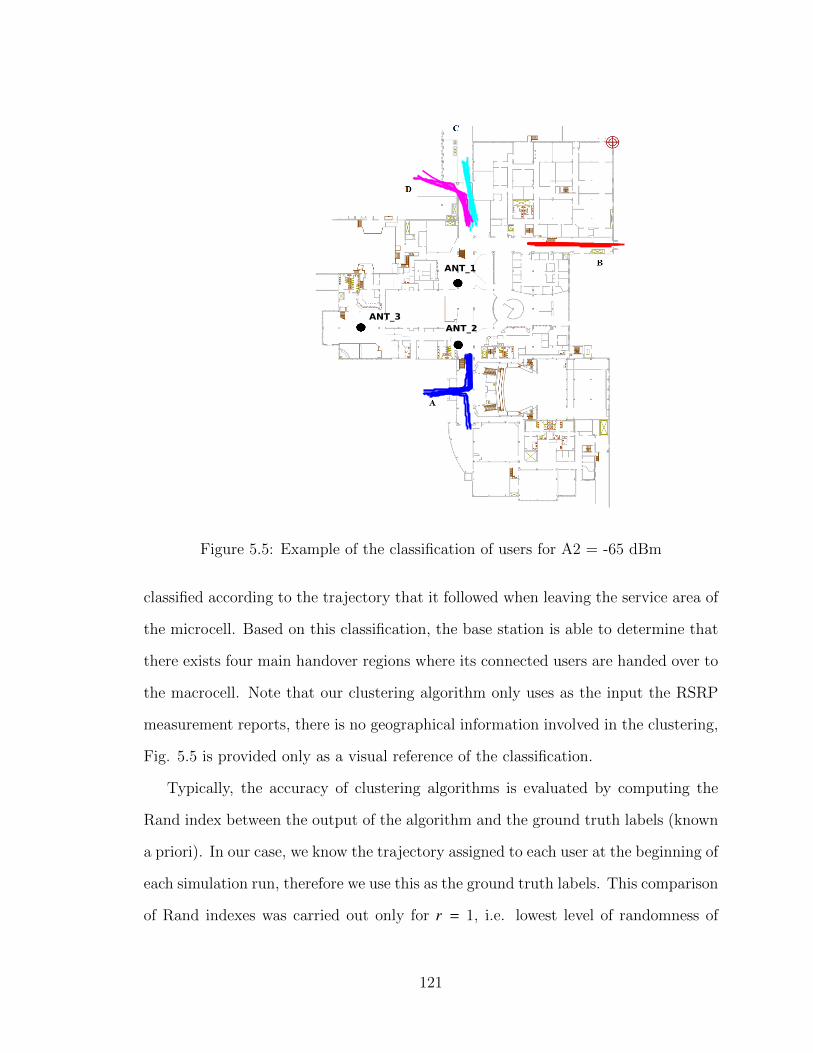
ANT_1
ANT_2ANT_3
Figure 5.5: Example of the classification of users for A2 = -65 dBm
classified according to the trajectory that it followed when leaving the service area of
the microcell. Based on this classification, the base station is able to determine that
there exists four main handover regions where its connected users are handed over to
the macrocell. Note that our clustering algorithm only uses as the input the RSRP
measurement reports, there is no geographical information involved in the clustering,
Fig. 5.5 is provided only as a visual reference of the classification.
Typically, the accuracy of clustering algorithms is evaluated by computing the
Rand index between the output of the algorithm and the ground truth labels (known
a priori). In our case, we know the trajectory assigned to each user at the beginning of
each simulation run, therefore we use this as the ground truth labels. This comparison
of Rand indexes was carried out only for r = 1, i.e. lowest level of randomness of
121
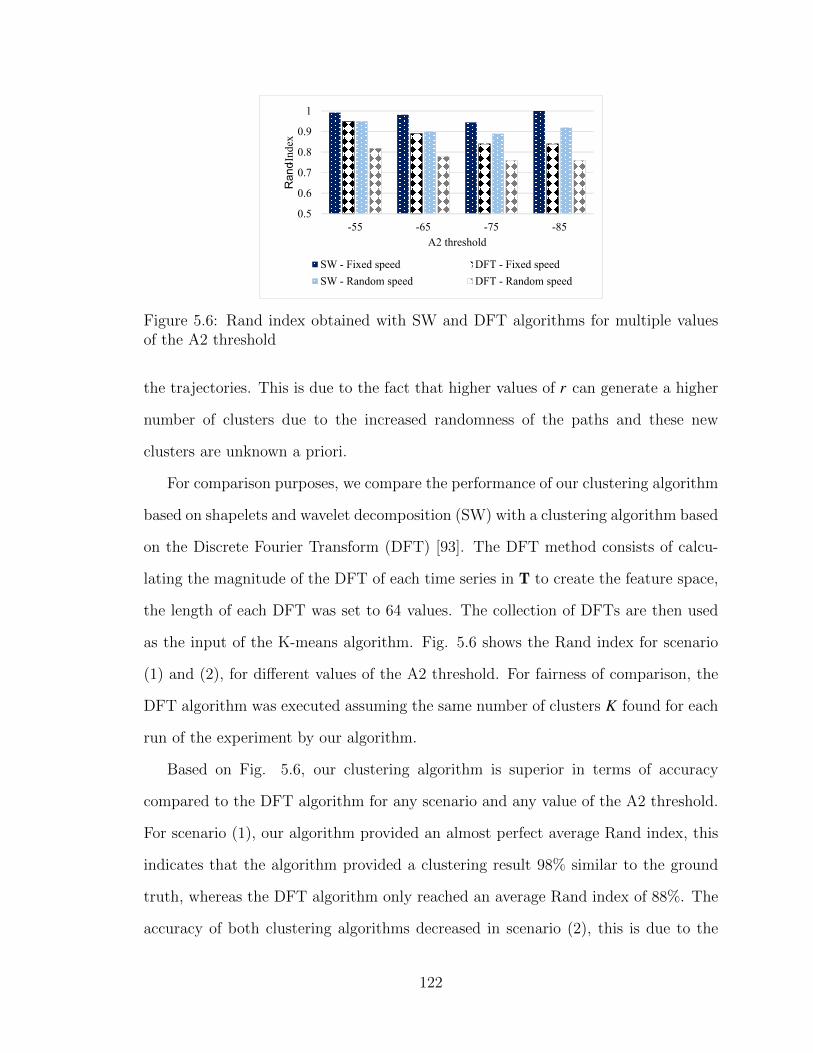
0.5
0.6
0.7
0.8
0.9
1
-55 -65 -75 -85
Rand-
Inde
x
A2 threshold
SW - Fixed speed DFT - Fixed speed
SW - Random speed DFT - Random speed
Figure 5.6: Rand index obtained with SW and DFT algorithms for multiple valuesof the A2 threshold
the trajectories. This is due to the fact that higher values of r can generate a higher
number of clusters due to the increased randomness of the paths and these new
clusters are unknown a priori.
For comparison purposes, we compare the performance of our clustering algorithm
based on shapelets and wavelet decomposition (SW) with a clustering algorithm based
on the Discrete Fourier Transform (DFT) [93]. The DFT method consists of calcu-
lating the magnitude of the DFT of each time series in T to create the feature space,
the length of each DFT was set to 64 values. The collection of DFTs are then used
as the input of the K-means algorithm. Fig. 5.6 shows the Rand index for scenario
(1) and (2), for different values of the A2 threshold. For fairness of comparison, the
DFT algorithm was executed assuming the same number of clusters K found for each
run of the experiment by our algorithm.
Based on Fig. 5.6, our clustering algorithm is superior in terms of accuracy
compared to the DFT algorithm for any scenario and any value of the A2 threshold.
For scenario (1), our algorithm provided an almost perfect average Rand index, this
indicates that the algorithm provided a clustering result 98% similar to the ground
truth, whereas the DFT algorithm only reached an average Rand index of 88%. The
accuracy of both clustering algorithms decreased in scenario (2), this is due to the
122
Table 5.3: Accuracy of the selected number of clusters
AccuracySW - fixed speed 98.5%
SW - random speed 80.1%
fact that the speed of the users is not constant anymore, this introduces distortions to
the time series since users moving faster would report less measurements than those
users moving slower. Our algorithm provided an average Rand index of 92% and
the DFT algorithm an average Rand index of 78%. This demonstrates the capability
of the SW algorithm to cope with variability of user speed. On average, the SW
algorithm provided close to 12% more accurate clustering results compared to the
DFT algorithm.
We also evaluated the accuracy of our methodology to automatically calculate the
number of clusters without a priori knowledge about the data. The results for each
scenario are shown in table 5.3. As it expected, the accuracy is higher when all users
are walking at the same speed as opposed to the case when the speed of the users is
random. On average, our methodology was able to calculate the number of clusters
with an accuracy of 89% of the actual value for both scenarios considering all runs of
the experiment.
Furthermore, we also evaluated the capability of the clustering algorithm to gen-
erate well-defined clusters as the randomness levels of the paths increased (higher
values of the radius r). A clustering that properly fits the data generates clusters
containing data instances that are similar to each other and properly separates those
which are not similar. We evaluated the quality of the clusters by computing the
intra-cluster distortion for each cluster as:
Dintra cluster( j) =1
N j
Nj∑m=2
m−1∑i=1
sD(Ti,Tm) (5.13)
123

Where N j is the number of time series in cluster j. Note that the time series in
the cluster should be sorted in ascending order of length before applying (5.13). The
quantity Dintra cluster( j) represents the average subsequence distance between time
series that belong to the same cluster. We calculate the total average intra-cluster
distortion DT as:
DT =1
K
K∑j=1
Dintra cluster( j) (5.14)
Where K is the number of clusters. Ideally, low values of DT are preferred since
they indicate well-defined clusters.
Fig. 5.7 and 5.8 show the average DT for each scenario as a function of the
values of r. For scenario (1), the values of DT generated by the SW algorithm are
significantly below the ones provided by the DFT algorithm, this indicates that each
cluster provided by the SW algorithm contains highly similar time series. A similar
result is observed in scenario (2), where both algorithms provided lower DT due to
the fact that the speed of users is random and this introduces variability in the time
series, therefore the number of clusters is higher and this leads to lower values of DT
as compared to scenario (1). However, the SW algorithm still provides better defined
clusters for this scenario. The total average of DT per scenario are shown in Fig. 5.9,
our clustering algorithm was able to provide clusters with an improvement of 75% in
the total average intra-cluster distortion for both scenarios.
5.7 Summary
In this chapter we have proposed a methodology that allows base stations to auto-
matically and autonomously discover the RF conditions of its cell-edge. We propose
the use of machine learning and data mining techniques to identify patterns in the
RSRP measurement reports submitted by users as they approach the cell-edge. Our
124
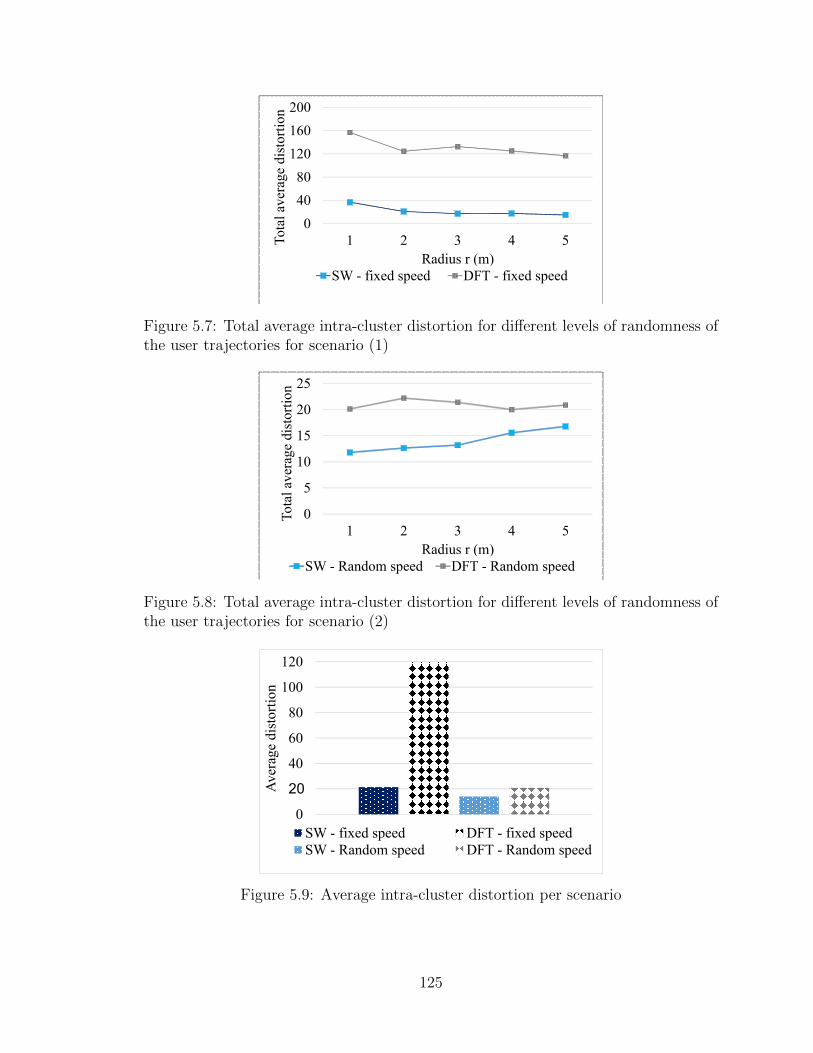
0
40
80
120
160
200
1 2 3 4 5Tota
l ave
rage
dis
tort
ion
Radius r (m)SW - fixed speed DFT - fixed speed
Figure 5.7: Total average intra-cluster distortion for different levels of randomness ofthe user trajectories for scenario (1)
0
5
10
15
20
25
1 2 3 4 5
Tota
l ave
rage
dis
tort
ion
Radius r (m)SW - Random speed DFT - Random speed
Figure 5.8: Total average intra-cluster distortion for different levels of randomness ofthe user trajectories for scenario (2)
0
20
40
60
80
100
120
Ave
rage
dis
tort
ion
SW - fixed speed DFT - fixed speedSW - Random speed DFT - Random speed
Figure 5.9: Average intra-cluster distortion per scenario
125

simulations considered an LTE network consisting of a macrocell and a indoor micro-
cell. Our clustering algorithm based on unsupervised-shapelets and multi-resolution
wavelet decomposition (SW) provided superior performance compared to a DFT-
based clustering algorithm. Our algorithm SW was able to provide clustering results
close to 12% more accurate and up to 75% better quality of clusters. Furthermore,
our methodology to automatically determine the number of clusters without any prior
knowledge was able to achieve an accuracy close to 90%.
126
Chapter 6
Optimization of handoverparameters for in-building systems
The optimization of handover parameters for in-building systems is investigated in
this chapter. We propose a novel methodology that provides in-building base stations
with the flexibility to customize handover parameters to specific radio frequency con-
ditions at the cell-edge for different loading scenarios. We propose the use of machine
learning and data mining techniques to allow the base stations to autonomously learn
and identify characteristic patterns in the received signal strength values (reported
by users during the handover process), and apply optimal HO parameters for each
case. Our optimization strategy jointly considers the radio frequency conditions at
the cell-edge and the load levels of the base stations, to determine optimal handover
parameters that maximize the quality of service and guarantee the continuity of ser-
vice at the cell-edge. We evaluated our methodology with experimental data collected
from two fully operational LTE in-building systems deployed in a university campus.
Our results show that with our methodology the spectral efficiency at the cell-edge
can be greatly improved. Downlink data rate gains at the cell-edge reached a value
close to 150% for a certain loading scenario compared to the traditional approach of
selecting a unique set of handover parameters for the entire in-building system.
6.1 Introduction
Nowadays, in-building systems are being largely deployed in different venues like:
shopping centers, airports, stadiums and university campuses. However, the opti-
127
mization of handover parameters in in-building systems is a challenging task for net-
work operators, especially due to the nature of HetNets that combine low power and
high power base stations. Typically, operators define the handover parameters with
the objective of guarantying the continuity of service at the cell edge. However, with
the implementation of new technologies like VoLTE, the quality of service provided
to users as they move between coverage areas becomes also a relevant aspect.
In this chapter, we propose a methodology to optimize the handover parameters
of in-building systems. In order to determine the optimal values of the handover
parameters, such methodology jointly considers two essential factors in HetNets: RF
conditions at the cell-edge and load level of the cells. Our approach comes to answer
the question of how late or how early a handover can be executed in order to maxi-
mize the quality of service at the cell-edge while reducing handover failures and the
triggering of unnecessary handovers.
We propose the use of machine learning and data mining techniques to allow
the in-building system to autonomously learn and identify characteristic patterns in
the signal strength received from users as they approach the cell-edge (as described
in chapter 5), and apply optimal HO parameters for each case. We evaluated the
performance of our approach with experimental data collected from fully operational
LTE in-building systems.
The rest of the chapter is organized as follows: in Sect. 6.2 we describe the main
handover optimization strategies currently proposed in the literature. In Sect. 6.3
we describe the contributions of the work presented in this chapter. In Sect. 6.4 we
describe the handover procedure in LTE systems. We provide a detailed description of
our methodology to optimize handover parameters in Sect. 6.5. In Sect. 6.6 and 6.7
we provide details regarding our experimental setup and the performance evaluation
of our methodology, respectively. Finally, we provide a summary in Sect. 6.8.
128
6.2 Related work
The development of self-optimizing strategies in cellular networks have attracted sig-
nificant interest in the research community in recent years, in particular strategies
related to the self-optimization of mobility parameters (e.g. Mobility Robustness Op-
timization - MRO). Such strategies are intended to automate the adjustment of HO
parameters. In [47], one of the most influential approaches for the automatic opti-
mization of handover parameters is described. The approach consists of the selection
of suitable handover parameters based on the continuous monitoring of specific per-
formance indicators (e.g. handover failure ratio and the ping-pong ratio). If any of the
performance indicators exceeds a certain predefined threshold, the base station incre-
mentally modifies the handover parameters until the performance indicator reaches
an acceptable level. This approach has a slow response to changes since it requires
the collection of a large number of handover statistics to trigger the modification of
the handover parameters [48]. For example, a number of handover failures must occur
before the algorithm adjusts the parameters. In [49, 50] the authors have proposed
similar handover optimization strategies. These approaches propose the application
of a single set of parameters for each cell.
In [48, 51], the authors modified the approach in [47], by defining new metrics in
addition to the performance indicators in [47]. The authors called such indicators
“soft-metrics” (e.g. handover command transmission time). Their objective was
to improve the capability of the algorithm to quickly react to handover failures by
defining metrics which are strongly correlated with the increase in handover failures.
Hence, the optimization algorithm is triggered by observing the soft-metrics instead
of the performance indicators as it is done in [47].
In [52], the authors propose an analytical method to determine handover param-
eters, specifically the RSRP threshold used to trigger handovers and a timer used to
129
avoid the triggering of unnecessary handovers (time-to-trigger). They define a math-
ematical expression that relates the time-to-trigger (TTT) with the variance of the
RSRP measurements reported by the mobiles. A large value of the variance of the
RSRP values indicates a higher chance of triggering unnecessary handovers, hence
larger TTT values are required. To determine the RSRP threshold, they apply the
Page Hinkley test to detect the RSRP level at which the neighboring cell becomes
stronger than the serving cell, at such level the handover should be triggered to avoid
handover failures. The handover parameters are adapted to changes in performance
indicators with an iterative algorithm based on simulated annealing. This is one of
the first approaches that propose analytical expressions for the handover parameters
in homogeneous networks.
The idea of adapting the handover parameters to specific cell-edge conditions in
HetNets was initially investigated in [46]. The authors proposed a methodology to
deal with the specific challenges found in HetNets (e.g. uneven interference levels at
the cell edge). They propose to allow the base station to determine the best moment
to initiate the request of the handover to the target cell. In their approach, the
base station monitors the values of CQI reported by users as they approach the cell-
edge and the handover is initiated when the reported CQI falls under a predefined
threshold. The CQI values are directly related to the SINR. With this approach,
the handovers are not triggered based on a unique value of a received signal strength
threshold, instead the actual RF conditions of the cell edge determine the moment
when the handover is initiated.
In [53], the authors propose to use different sets of handover parameters based
on the type of base station in a HetNet. According to their study, in macrocell-only
networks, the overlap between coverage areas is larger, hence conservative handover
parameters can be applied. However, the overlap between macrocells and smalls cells
(e.g. macro-to-pico) or even among small cells (pico-to-pico) tend to be smaller,
130
therefore more aggressive handover parameters are required to avoid link failures.
In [54], the authors propose to customize handover parameters based on user behavior.
They proposed to categorize users according to their speed and their type of traffic
(real time or non-real time). The handover parameters are then optimized for each
category following an approach similar to [47].
Our approach has been inspired by the fact that a single set of handover parame-
ters provides suboptimal values of the handover performance indicators, particularly
in HetNets, as stated in [46]. We consider that the handover parameters should be
optimized according to the actual RF conditions at the cell-edge. But also, the opti-
mization should jointly consider the loading conditions of the cells. This is required
in order to provide the highest quality of service possible as users approach the edge
of the cell. This is a factor that is typically ignored by the methodologies proposed in
the literature. Our approach comes to answer the question of how late or how early a
handover can be executed in order to maximize the quality of service at the cell-edge
while reducing handover failures and the triggering of unnecessary handovers.
The key factor of our approach is the application of machine learning and data
mining techniques to classify users in clusters based on their mobility behavior and
the application of optimal handover parameters for each cluster. A similar idea was
introduced by Sas et al. in [55]. In their work, the authors proposed the collection of
RSRP measurement reports submitted by a limited set of users, labeled as “reference
users”, as they move along the service area of a homogeneous network with multiple
macrocells. Their objective was to match the RSRP measurement reports from new
users to those reports previously collected from the reference users. If a user is
matched to one of the reference reports, then it is assumed that this user will follow
the same trajectory as the matched reference user.
Our approach substantially advances the idea in [55], specifically in the context
of in-building systems. We propose the application of the clustering algorithm pro-
131

posed in chapter 5 to identify patterns in the RSRP measurements reports submitted
by multiple users as they leave the service area. We use such patterns to cluster the
measurement reports and identify the RF propagation conditions that users, following
such archetypal trajectories, are subject to. Then, we find optimal handover param-
eters for each cluster by jointly taking into consideration the specific RF conditions
of each cluster and the loading conditions of the serving and target cell. The authors
in [55] only treated the problem of matching measurement reports to a reference and
did not provide a methodology for the optimization of handover parameters.
6.3 Contributions
The contributions of this chapter can be summarized in two main points:
1. We propose a novel methodology to optimize handover parameters for in-
building systems. The key insight behind such methodology is the adjustment
of handover parameters based on the knowledge that base stations are able to
acquire regarding the RF conditions of their cell-edge. This knowledge is ob-
tained through the application of the clustering algorithm proposed in chapter
5. The objective of our methodology is to maximize the quality of service while
guarantying the continuity of service at the cell-edge.
2. Our methodology can also be considered as a load balancing approach for users
in connected mode. This is due to the fact that the optimization strategy not
only takes into consideration the levels of interference at the cell-edge but also
the loading conditions of the serving and target cell. The handover parameters
are then adjusted accordingly in order to provide the highest quality of service
possible.
132
6.4 Handover procedure in LTE/LTE-A
In this section we briefly describe the handover process in LTE/LTE-A systems. A
basic description of this process was provided in section 5.4, here we provide some
additional details regarding the intra-carrier hard handover procedure for mobiles in
connected mode (i.e. mobiles actively receiving and sending data to their serving base
station). As it is described by Lopez in [83], a handover consists of four main stages:
measurement, processing, preparation, and execution. During the measurement stage,
a mobile (UE) in connected mode continuously monitors the strength of a reference
signal transmitted by the serving and nearby cells, this reference signal is known
as RSRP. UEs can also monitor the quality of the received signal in terms of the
RSRQ [34]. A mobile starts transmitting measurement reports (MRs) to its serving
base station (eNB) whenever certain conditions regarding the RSRP samples occur.
These conditions, or events, are standardized and set up by the network operator.
There are several events that can trigger the transmission of the RSRP MRs, named
events A1 through A6 [83]. Events A2 and A3 are considered in this chapter and
therefore, a short description of these events is provided.
The entry condition for the A2 event occurs when the RSRP samples of the serving
eNB (RSRPS) become worst than certain threshold (A2 threshold) as shown in (6.1a).
RSRPS < A2 − H (6.1a)
RSRPS > A2 + H (6.1b)
Where H is a hysteresis parameter applied to avoid unnecessary triggering of the
event due to rapid fluctuations of the RSRP samples, H can take values from 0 to
30 dB. Once the A2 event has been triggered, the mobile monitors the RSRP level of
its serving cell, and if the exit condition in (6.1b) is not satisfied for a certain period,
then the mobile starts transmitting MRs to its serving base station. This period is
133
the parameter called time-to-trigger. The frequency of transmission of the MRs is
defined by the network operator, in actual systems it is typically set to one MR every
200ms or 300ms.
On the other hand, the entry condition of the event A3 occurs when the RSRP
level of a neighboring cell (RSRPN) is above RSRPS plus a threshold (A3 threshold)
as shown in (6.2a).
RSRPN > RSRPS + A3 + H (6.2a)
RSRPN > RSRPS + A3 − H (6.2b)
Once again, after the A3 event has been triggered, if the exit condition in (6.2b)
is not satisfied during the TTT period, then the UE starts the transmission of MRs
to its serving cell.
During the processing stage of the handover, the serving base station evaluates the
MRs transmitted by the mobile and defines the target cell (usually the neighboring
cell with the strongest RSRP level in the MRs). It will then contact the target cell
to request a handover. The target cell executes admission control procedures and
accepts or rejects the request. If the request is accepted, then the target cell starts
the preparation stage of the handover and sends an “HO request acknowledgment”
to the serving cell. When this acknowledgment is received, the serving cell sends an
“HO command” to the mobile. At this point, the serving base station releases any
radio resources assigned to the mobile and the connection with the mobile is ended.
Finally, during the execution stage of the handover, the mobile tries to establish
a connection with the target cell using a random access procedure. If the connection
is successful, then the handover is completed and the target cell starts transmitting
data to the mobile.
The A2 or A3 thresholds, hysteresis H and TTT timer are fundamental parameters
that control the HO process. These parameters need to be optimized by network
134
operators for specific network conditions in order to guarantee the continuity of service
as users move between coverage areas (i.e. to reduce HO failures).
Handover failures can occur when the handover is executed too late, too early or
when it is executed to the wrong target cell. A too late handover occurs when the
signal from the serving cell degrades below a minimum acceptable level before the
mobile is able to receive the “HO command”. On the other hand, a too early handover
occurs when the communication with the target cell is not strong enough yet when
the mobile tries to establish a connection using the random access procedure. And
finally, in some cases the target cell is wrongly selected by the serving base station,
usually this is due to an error in the list of neighboring cells. In this case the mobile
will not be able to complete the handover since the target cell is likely out of its
uplink range. When handover failures happen, there is an abrupt discontinuity of the
service and a connection re-establishment procedure has to be executed by the mobile,
as a result, the quality of service is negatively affected and this leads to subscriber
dissatisfaction.
The occurrence of handover failures can be reduced or even eliminated with the
application of optimal HO parameters. A reduction of the TTT helps reduce too
late HOs since the handover is executed faster. However, a small TTT increases the
chances of ping-pong events (i.e. UE is handed over back and forth from the serving
eNB and the target eNB over a short period), this is undesirable since it increases the
signaling load in the network due to unnecessary HO operations. Therefore, these
types of trade-offs have to be considered during the optimization process. Further-
more, the current HO procedure described in this section does not take into consid-
eration the quality of service provided to the mobile users as they cross the edge of
the service area. Such quality of service is not only affected by the HO parameters
but also by the dynamic loading conditions of both the serving and target cell.
In the next sections, we describe our proposed methodology to optimize the han-
135
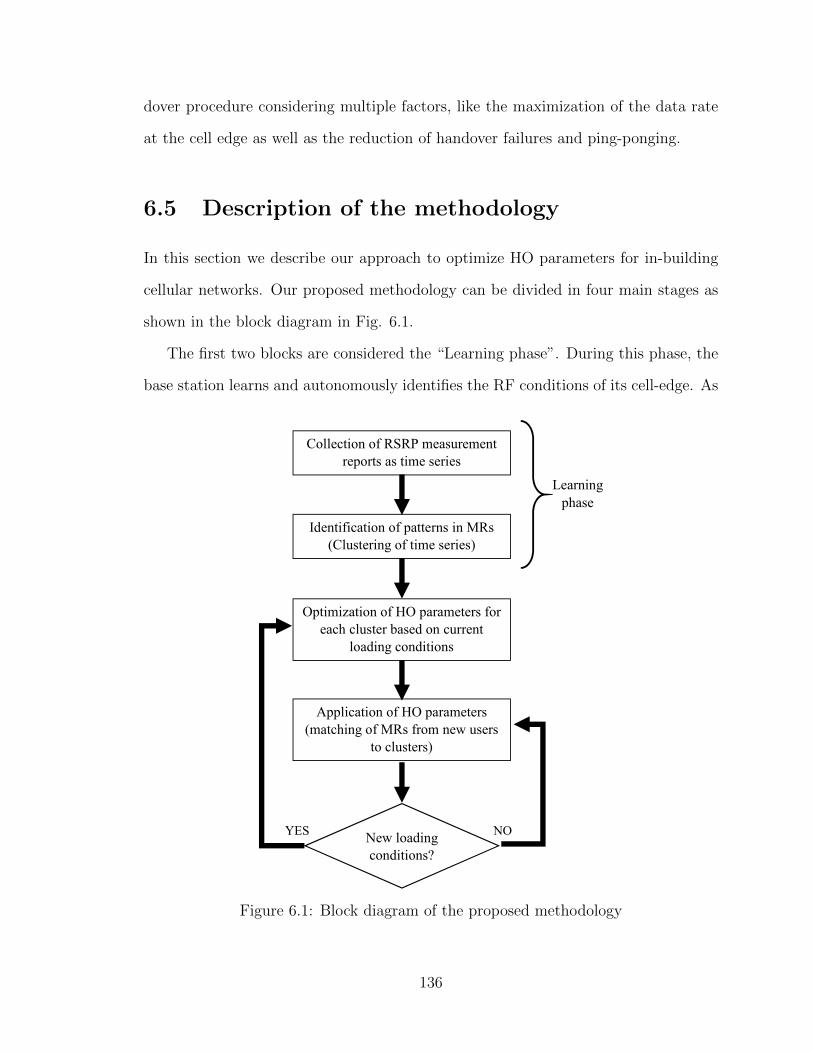
dover procedure considering multiple factors, like the maximization of the data rate
at the cell edge as well as the reduction of handover failures and ping-ponging.
6.5 Description of the methodology
In this section we describe our approach to optimize HO parameters for in-building
cellular networks. Our proposed methodology can be divided in four main stages as
shown in the block diagram in Fig. 6.1.
The first two blocks are considered the “Learning phase”. During this phase, the
base station learns and autonomously identifies the RF conditions of its cell-edge. As
Collection of RSRP measurement
reports as time series
Identification of patterns in MRs
(Clustering of time series)
Optimization of HO parameters for
each cluster based on current
loading conditions
Application of HO parameters
(matching of MRs from new users
to clusters)
New loading
conditions?
YES NO
Learning
phase
Figure 6.1: Block diagram of the proposed methodology
136
it was mentioned before, the cell-edge of in-building systems is highly irregular and
subject to uneven levels of interference caused by the outdoor macrocells.
The first stage of the methodology consists of the collection of measurements
reports transmitted by users that were successfully handed over to another cell. We
consider the RSRP values, from the MRs sent by the UEs, as a collection of time series
that can be used to identify archetypal movements of users in indoor environments,
particularly as users exit the building. As pointed out in [55], users that move along
similar trajectories will transmit measurement reports that are highly correlated with
each other. In the case of indoor environments, the movement of users as they leave
the building is somewhat predefined, as people tend to exit the building walking
through doors whose locations remain unchanged. Hence, mobiles following a similar
paths will likely experience similar RF conditions during the handover to the outdoor
macrocell. Therefore, we propose to automatically identify patterns in the MRs that
will allow the base station to determine the typical RF conditions of the environment
as users approach its cell-edge. In order to identify such patterns, we propose the use
of machine learning and data mining techniques. For this purpose, in our methodology
we apply the clustering algorithm proposed in chapter 5. This automatic identification
of patterns in the MRs corresponds to the second block of the learning phase.
Once the base station has clustered the set of MRs according to the identified
characteristic patterns, we propose to calculate optimal values of the HO parameters
for each one of the clusters found. Typically, each cluster of MRs corresponds to a
section of the cell-edge with very distinctive characteristics. For example, consider
these two cases: 1) one of the clusters of MRs corresponds to a group of users where the
RSRP from the serving eNB decreased sharply as they walk out of the building and the
signal from the outdoor macrocell increased rapidly, 2) another cluster corresponds to
a set of users where the degradation of the signal from the serving cell was rather slow
and the signal from the macrocell also increased slowly as users left the building. For
137
case 1, a fast execution of the HO might be required in order to avoid an HO failure,
whereas in case 2 the HO may be slightly delayed. Both cases represent examples
of the irregularity of the cell-edge in in-building systems and the main reason why a
unique set of HO parameters may not provide optimal results. The optimization of
HO parameters becomes even more complex when we consider the loading conditions
of both, the in-building system and the outdoor macrocells. If one of the systems is
highly congested, then in order to maximize the quality of service provided, it may
be advantageous to encourage users to receive service from the lightly loaded system
by either delaying the execution of the HO or executing it earlier. During the third
stage of our methodology, we propose to find the optimal HO parameters for each
one of the clusters of MRs that maximize the quality of service provided to users for
specific loading conditions, while keeping the HO failure rates under strict levels.
Finally, the last stage of the methodology corresponds to the application of the HO
parameters calculated for each cluster. In this stage, a matching algorithm is executed
to match the MRs being currently transmitted by mobiles approaching the cell-edge
to one of the clusters previously found during the second stage of the methodology.
Once the MRs have been matched, the base station can execute the HO according to
the optimal parameters for that specific cluster.
As it was pointed out before, the optimal HO parameters per cluster depend on
the current loading conditions of the in-building system and the outdoor macrocells.
Therefore, the base station of the in-building system continuously monitors the load-
ing conditions and adjust the HO parameters of each cluster accordingly, as depicted
in Fig. 6.1.
In the next subsections we provide the details regarding the algorithms imple-
mented in each stage of the proposed methodology.
138
6.5.1 Collection of measurement reports
During this initial stage, the base station collects measurement reports transmitted by
users that were successfully handed over to another cell. These measurement reports
are considered as time series and will be used as input to the clustering algorithm
described in the next subsection.
As users walk outside the coverage area of the in-building system, two main situa-
tions happen as part of the handover process: 1) the triggering of the transmission of
MRs and 2) the actual moment when the base station transmits the HO request mes-
sage to the target cell. These situations mark the beginning and the end moment of
the collection of RSRP samples from the measurement reports transmitted by users.
In order to facilitate the collection of enough MRs per mobile (for clustering
purposes), we propose the use of event A2 to trigger the transmission of measuring
reports (see Sect. 6.4). Furthermore, we propose the use of the A3 event to determine
the actual moment when the base station requests the HO to the target cell. This
means that the base station monitors the RSRP samples in the MRs and looks for
the occurrence of an A3 event. Once the entry condition in (6.2a) holds for a TTT
period, then the HO is actually requested to the target cell and the base station stops
the collection of MRs from the user. Hence, the triggering of an A3 event determines
the end of the collection of MRs from the mobile.
The MRs collected from a user constitute a time series. The base station should
be able to collect enough time series such that the relevant characteristic patterns
(clusters) can be found by the clustering algorithm. In most cases, due to the fact
that in-building systems are deployed to provide service to high traffic areas, this
collection of time series can occur relatively fast during the first hours of operation
of the system.
139
6.5.2 Clustering of time series
In order to automatically identify patterns in the MRs, a clustering algorithm is
applied by the base station of the in-building system. In this study we propose to
apply the clustering algorithm that we developed in our previous work in [60]. The
details of this algorithm can be found in chapter 5.
6.5.3 Optimization of handover parameters
With the identification of clusters in the collected MRs, the base station of the in-
building system is able to learn the radio frequency conditions of the paths that users
follow when they leave the building, without actually knowing their physical location.
Each one of the identified clusters has very specific characteristics in terms of the
behavior of the RSRP. In some cases, the RSRP at the cell-edge decreases sharply
while in other cases a slow decrease occurs. The insight of our approach to optimize
HO parameters, is to find suitable values for the TTT and A3 threshold to guarantee
the continuity of service at the cell edge (i.e. avoid HO failures) for users whose
MRs follow a similar pattern as one of the identified cluster of RSRP measurements.
This means that the base station customizes the HO parameters according to the
specific RF conditions of the cell edge that such users will be subject to as they leave
the building. Furthermore, in our approach we do not only find values of the HO
parameters that will reduce or eliminate HO failures and ping-ponging but also the
quality of service provided at the cell edge is taken into consideration. Therefore,
our methodology is a much more comprehensive approach than the ones currently
proposed in the literature as described in Sect. 6.2, where the typical objective is to
find a unique set of HO parameters that reduces HO failures. With our methodology,
base stations are able to determine how late or how early an HO can be executed
with minimum degradation of the quality of service while guaranteeing the continuity
140

of service at the cell edge.
In order to reduce HO failures and ping-ponging for the specific cell-edge condi-
tions of each cluster of MRs, the behavior of the RSRP from the serving cell as well
as the target cell has to be evaluated. This is due to the fact that the RF conditions
of the cell-edge are one of the main factors that affect the success of the handovers.
However, in order to maximize the quality of service provided to users as they walk
through the cell-edge, the loading conditions of the serving and target cell becomes
a vital factor. Our approach combines the evaluation of these two factors: RF condi-
tions at the cell-edge and loading conditions of the cells. For example, a large value
of the A3 threshold or long TTT allows the base station to delay the execution of
the handover, this might be necessary in order to provide an acceptable data rate
if the target cell is congested. On the other hand, a small value of the A3 thresh-
old or short TTT allows the base station to execute the HO earlier, which might be
necessary when the serving cell is the one congested. However, how early or how
late the HO can be executed is limited by the cell-edge conditions, therefore both
factors are coupled and this fact has to be considered when the optimization of the
HO parameters is carried out. Our approach provides an answer to this problem, by
determining suitable values for the A3 threshold and the TTT such that data rates
are maximized and the HO failure rate is kept under a desired level.
In the next subsection we proceed to describe the formulation of the optimization
problem.
6.5.3.1 Formulation of the optimization problem
Our optimization strategy consists of the definition of an objective function Gk asso-
ciated with the kth cluster of MRs. This function has four terms, each one of them
corresponds to one performance indicator (PI). The first PI corresponds to the quality
of service that mobiles receive as they go through the edge of the cell. The second PI
141
accounts for the handover failures due to too early or too late handovers. The third
PI corresponds to the rate of ping-pong events and finally, the fourth term accounts
for the number of handovers. These four PIs are a function of the HO parameters to
be optimized: the A3 threshold and TTT. These two parameters constitute what we
define as an operating point OP = (A3,TTT ). Furthermore, the first PI related to
the quality of service is also a function of the loading conditions as it was described
previously.
The optimal operating point for the kth cluster (OP∗k) is the one that solves the
optimization problem in (6.3).
maxOP∈P
Gk (OP) = α1Uk + α2(1 − HOFk )+
α3(1 − HPPk ) + α4(1 − HONk )
s.t. HOFk < β
HPPk < δ
(6.3)
Where P is the set of all possible values of the operating point and Ck is the
set of MRs associated with the kth cluster label. The term Uk is the normalized
average achievable data rate for users that transmitted MRs in Ck . HOFk and HPPk
are the HO failure rate and HO ping-pong rate when the HO parameters OP are
applied for users whose MRs belong to cluster Ck . The term HONk is the normalized
number of HOs executed. The variables αi are weighting factors with αi ∈ [0, 1] and∑αi = 1, these factors can be adjusted by the network operators. Finally, β and δ are
constraints imposed on the HO failure and ping-pong rates. A detailed description
of the calculation of the PIs is provided in the following subsection.
142
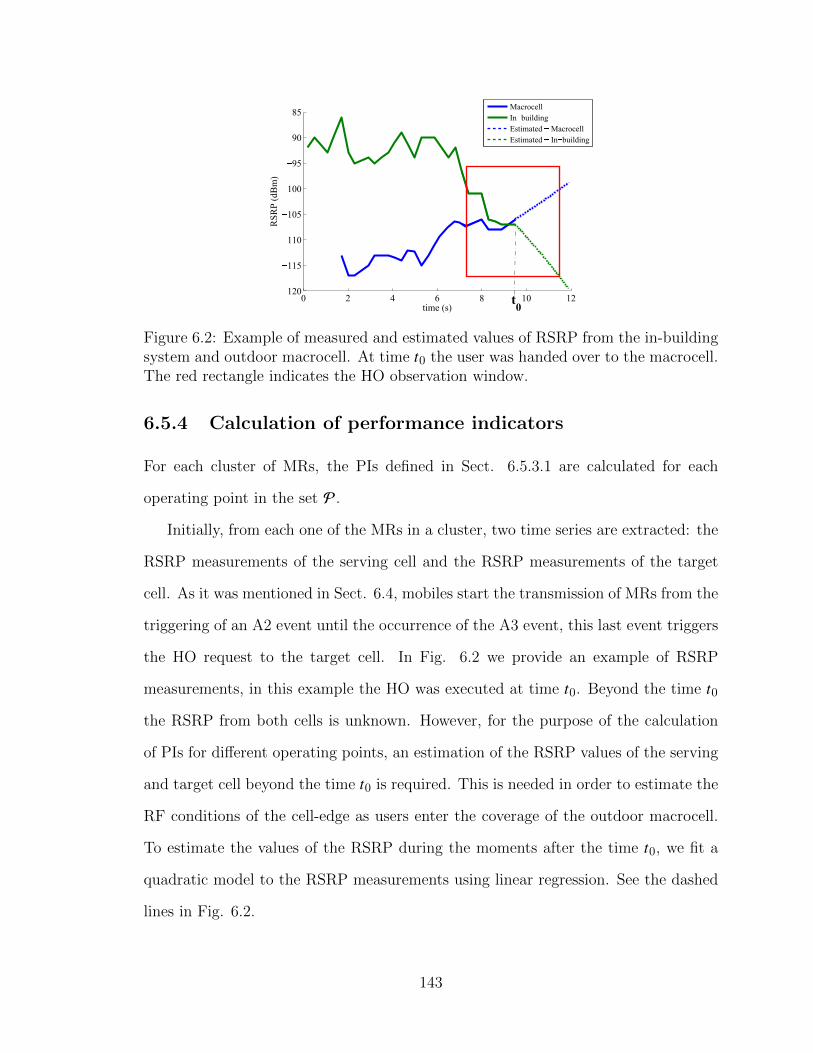
0 2 4 6 8 10 12120
115
110
105
100
95
90
85
time (s)
RS
RP
(dB
m)
Macrocell
In building
Estimated Macrocell
Estimated In building
t0
Figure 6.2: Example of measured and estimated values of RSRP from the in-buildingsystem and outdoor macrocell. At time t0 the user was handed over to the macrocell.The red rectangle indicates the HO observation window.
6.5.4 Calculation of performance indicators
For each cluster of MRs, the PIs defined in Sect. 6.5.3.1 are calculated for each
operating point in the set P.
Initially, from each one of the MRs in a cluster, two time series are extracted: the
RSRP measurements of the serving cell and the RSRP measurements of the target
cell. As it was mentioned in Sect. 6.4, mobiles start the transmission of MRs from the
triggering of an A2 event until the occurrence of the A3 event, this last event triggers
the HO request to the target cell. In Fig. 6.2 we provide an example of RSRP
measurements, in this example the HO was executed at time t0. Beyond the time t0
the RSRP from both cells is unknown. However, for the purpose of the calculation
of PIs for different operating points, an estimation of the RSRP values of the serving
and target cell beyond the time t0 is required. This is needed in order to estimate the
RF conditions of the cell-edge as users enter the coverage of the outdoor macrocell.
To estimate the values of the RSRP during the moments after the time t0, we fit a
quadratic model to the RSRP measurements using linear regression. See the dashed
lines in Fig. 6.2.
143
Additionally, not all the RSRP values are used for the calculation of PIs, we
only consider the RSRP values at the cell-edge. For this purpose, we define an “HO
observation window” with a duration of HOw seconds. This window is centered at
time t0 as shown in Fig. 6.2. Therefore, only RSRP values inside the window are
considered for the calculation of PIs. This guarantees that PIs, like the normalized
average achievable data rate, are only affected by the actual cell-edge conditions.
For each OP ∈ P, our algorithm calculates the number of HO failures, ping-pongs
and the number of handovers triggered for each set of MRs in a cluster. Given an
operating point, the algorithm looks for the triggering of A3 events considering the
RSRP values inside the “HO observation window” and determines if a handover can be
executed successfully. If the HO is not successful (either too late or too early HO), then
an HO failure is counted and the algorithm estimates if a connection re-establishment
can be executed to resume the service based on the RSRP values. Additionally, for
successful HOs the algorithm checks if a ping-pong event has occurred. Therefore, to
calculate these PIs the algorithm essentially simulates the four stages of the handover
process as described in Sect. 6.4, for the period of time corresponding to the “HO
observation window”.
The handover failure rate and ping-pong event rate for the kth cluster are calcu-
lated according to (6.4) and (6.5) respectively.
HOFk (OP) =Failk (OP)
Failk (OP) + Succk (OP)(6.4)
HPPk (OP) =PPk (OP)
Failk (OP) + Succk (OP)(6.5)
Where Failk (OP) and Succk (OP) are the total number of HO failures and the
total number of successful HOs for cluster k with operating point OP, and PPk (OP)
is the total number of ping-pong events.
The normalized number of HOs, HONk , is simply calculated as:
144

HONk (OP) =Failk (OP) + Succk (OP)
HONmaxk
(6.6)
Where HONmaxk is the maximum number of HOs for cluster k obtained with any
of the values of OP, i.e. HONmaxk = max ({HONk (OP) |OP ∈ P}).
Finally, we proceed to describe the calculation of the normalized average achiev-
able data rate Uk . The achievable data rate for a user depends on the SINR, and it
is typically calculated with the well-known Shannon Hartley theorem [27]:
R j = BW j log2(1 + SI N RS) [bps] (6.7)
Where the term BW j is the portion of the bandwidth (in Hz) allocated to the
user for downlink transmissions and j is the user identifier. SINRS is the ratio of
the received power from the serving cell and the total power of the interference re-
ceived from neighboring cells plus noise. In actual systems, the amount of bandwidth
allocated to a mobile depends on the total number of users currently connected to
the cell. In our algorithm, we assume that bandwidth resources are shared among
connected users based on a proportional fair scheduler. Additionally, as it was shown
in [27], in the long term, the resource allocation that maximizes the sum of the rates
for all users connected to a cell is “equal allocation”, i.e.:
BW j =BWS
NS(6.8)
Where BWS is the total bandwidth available at the serving cell and NS is the total
number of users actively connected to the cell.
The calculation of the average achievable data rate Rk j (OP) is carried out by
determining the actual serving cell for each time instant corresponding to an RSRP
value in the “HO observation window” when the HO parameters in OP are applied.
Multiple HOs could be detected during the observation window, therefore the serving
cell is subject to change according to the HO stages described in Sect. 6.4. Hence,
145
for each time instant corresponding to an RSRP value in the observation window,
the algorithm determines the current serving cell and SINR, and calculates the value
of R j according to (6.7) and (6.8). Finally, all the values of R j calculated during the
observation window are averaged to obtain Rk j (OP). It is important to mention, that
during the execution stage of the handover, the mobile tries to establish a connection
with the target cell using a random access procedure. During this stage of the HO,
the mobile is not actively receiving data, therefore its value of R j is set to zero until
the mobile is able to successfully complete the HO.
In order to calculate Rk j (OP) for each j ∈ Ck , the base station must know the
loading condition of the target cell, i.e. cells should exchange their current number
of connected users.
Finally, the normalized achievable data rate Uk used in the optimization problem
(6.3) is calculated as:
Uk =
∑j∈Ck Rk j (OP)/|Ck |
Umaxk
(6.9)
Where Umaxk = max ({Uk (OP) |OP ∈ P}).
Note that all the PIs can only take values in the interval [0, 1].
6.5.5 Solving the optimization problem
In our methodology, the set P corresponds to the set of possible values of the operating
point OP = (A3,TTT ). According to the 3GPP standard [34], the TTT can only take
a finite number of possible values up to 5120 ms. However, some of the large values
that TTT can take are typically not suitable for pedestrian environments, hence we
have reduced the possible values of TTT to:
TTT ∈ {80, 100, 128, 160, 256, 320, 480, 512, 640, 1024} (6.10)
146
Regarding the A3 threshold, in our methodology it can take the following values:
A3 ∈ {−4,−3,−2,−1, 0, 1, 2, 3, 4, 5, 6, 7} (6.11)
Positive values of the A3 threshold are useful to delay the execution of the han-
dover. On the other hand, allowing the A3 threshold to take negative values enables
the base station to execute the HO earlier.
Based on (6.10) and (6.11), the set P has a finite and tractable number of possible
values. In our approach we evaluate the objective function Gk for each PO ∈ P and
select the operating point that satisfies the problem in (6.3) for each cluster.
6.5.6 Matching of time series
In order to apply the optimal HO parameters found in the previous stage of our
methodology, a matching algorithm is executed to match the MRs being currently
transmitted by mobiles approaching the cell-edge to one of the clusters previously
found during the second stage of the methodology. Once the MRs have been matched,
the base station can execute the HO according to the optimal parameters for that
specific cluster.
For the MRs currently being transmitted by a user, the RSRP values of the
serving cell are extracted and considered as a subsequence s. The matching algorithm
calculates first the average subsequence distance between the subsequence s and all
the time series corresponding to the RSRP values of the serving cell in each cluster:
sDk =
∑j∈Ck sD(s,Tj )|Ck |
(6.12)
Where sD(s,Tj ) is calculated according to (5.4). Finally, the cluster that matches
the subsequence s is selected according to:
k = arg mink∈C
sDk (6.13)
147
Where C is the set that contains all clusters (i.e. C = {C1, C2, . . . , CK }). Therefore,
the cluster with the overall minimum sDk is selected as the matching cluster and the
HO parameters in OP∗k are applied by the base station.
6.6 Experimental setup
In order to evaluate our methodology to optimize handover parameters for in-building
systems, we collected a set of RSRP measurements from fully operational LTE in-
building systems deployed in two of the buildings of the University of Regina in
Saskatchewan, Canada. The first in-building system corresponds to an indoor LTE
Huawei microcell base station with a passive distributed antenna system operating at
2.6 GHz. This system is deployed in the Riddell Center (“building A”), the building
represents a traffic hotspot due to the presence of a food court area, a restaurant and
the Student’s Union offices. Therefore, a significant number of users enter and leave
the building during the day. The second in-building system corresponds to an LTE
Huawei Lampsite system operating at 2.1 GHz with a set of distributed pico RRUs
(remote radio units). This second system is deployed in the Center for Kinesiology,
Health and Sport (“building B”), this building also represents a traffic hotspot due to
the presence of sports facilities (e.g. fitness center, indoor running track, basketball
courts, gymnasiums), classrooms as well as a medical clinic. Furthermore, sporting
events are regularly held in the gymnasiums of this building, such events attract a
significant number of people. Both in-building systems have a total bandwidth of 20
MHz.
Additionally, a 3 sector LTE macrocell system provides coverage to the campus
area and nearby neighborhoods. The LTE macrocell operates in both bands at 2.1
and 2.6 GHz with 20 MHz of bandwidth. The area surrounding both buildings is
covered by only one sector of the macrocell, i.e. outbound handovers are always
148

executed to the same sector of the macrocell.
In each one of the two selected buildings, the four main paths typically used
by most students and staff to exit the buildings were identified. For each one the
identified paths, we performed numerous walk tests, in each walk test we collected
a set of measurements of the RSRP from the in-building system and the outdoor
cell. An Android-based application called Nemo Walker Air, developed by Anite
Inc., was used to perform the measurement and logging of the experimental data.
This application was installed on a Sony Xperia Z3 phone capable of logging RSRP
measurements at a rate of approximately 300 ms, these measurements were taken
with the phone in connected mode. The measurements were collected at a normal
pedestrian speed, starting inside of each building and walking through the exit doors
of the building following the identified paths. This process was repeated for an average
of 15 times per doorway in each building. For each one of these walk tests, the RSRP
measurements collected beyond the moment when the mobile phone was handed over
to the macrocell were discarded.
6.7 Performance evaluation
We have organized the results of the performance evaluation of our methodology in
three main sections. In Sect. 6.7.1 we provide the results of the clustering algorithm
using as input the experimental data collected in each building. In Sect. 6.7.2 we
provide the results of the HO optimization methodology, this includes the selection
of optimal operating points for different loading conditions as well as an evaluation of
the data rate gains when the optimal operating point is applied. Finally, we briefly
describe the accuracy of the matching algorithm in Sect. 6.7.3.
In table 6.1, we provide a summary of the values of the main parameters used for
the performance evaluation.
149

Table 6.1: Parameters for evaluation procedure
Parameter ValueHysteresis 1 dB
A2 threshold in-building systems -80 dBmA3 threshold - macrocell 3 dB
TTT - macrocell 320 msHOw 4 sβ 1%δ 1%
αi (i = 1, 2, 3, 4) 0.25Min. SINR before link failure -8 dB
Min. RSRP to re-establish connection -115 dBmHO execution duration 50 ms
Duration of Random access procedure 25 msDuration of connection re-establishment 1 s
Min. time of stay for ping-ponging determination 1 sWavelet decomposition levels for clustering 4
6.7.1 Clustering algorithm
The experimental measurements collected according to the procedure described in
Sect. 6.6 were used as the input to the clustering algorithm based on shapelets and
wavelets described in Sect. 6.5.2. In Fig. 6.3, we provide an example of the output
of the clustering algorithm for the data collected in building B. In each one of the
graphs of Fig. 6.3 a cluster with the time series from the RSRP measurements of the
in-building system is shown. Each cluster corresponds to one of the paths selected to
gather experimental data. In this case, the clustering algorithm was able to correctly
determine the number of clusters. Furthermore, a Rand index of 95% was obtained
when these clusters were compared to the ground truth clusters. A similar result was
obtained with the measurements collected in building A, where the Rand index was
92%. Therefore, the clustering algorithm is capable of finding patterns in the RSRP
measurements to classify the time series with relatively high accuracy. These results
are consistent with the accuracy reported in our previous work in [60], for the case
150
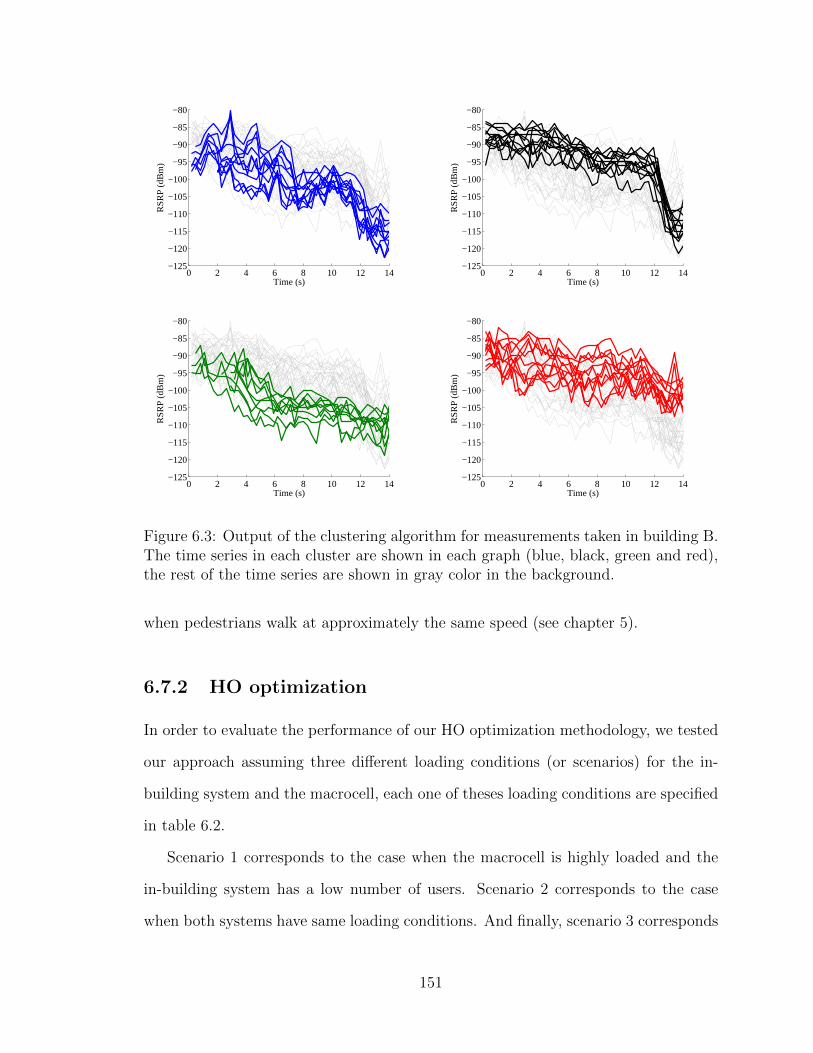
0 2 4 6 8 10 12 14−125
−120
−115
−110
−105
−100
−95
−90
−85
−80
Time (s)
RS
RP
(dB
m)
0 2 4 6 8 10 12 14−125
−120
−115
−110
−105
−100
−95
−90
−85
−80
Time (s)
RS
RP
(dB
m)
0 2 4 6 8 10 12 14−125
−120
−115
−110
−105
−100
−95
−90
−85
−80
Time (s)
RS
RP
(dB
m)
0 2 4 6 8 10 12 14−125
−120
−115
−110
−105
−100
−95
−90
−85
−80
Time (s)
RS
RP
(dB
m)
Figure 6.3: Output of the clustering algorithm for measurements taken in building B.The time series in each cluster are shown in each graph (blue, black, green and red),the rest of the time series are shown in gray color in the background.
when pedestrians walk at approximately the same speed (see chapter 5).
6.7.2 HO optimization
In order to evaluate the performance of our HO optimization methodology, we tested
our approach assuming three different loading conditions (or scenarios) for the in-
building system and the macrocell, each one of theses loading conditions are specified
in table 6.2.
Scenario 1 corresponds to the case when the macrocell is highly loaded and the
in-building system has a low number of users. Scenario 2 corresponds to the case
when both systems have same loading conditions. And finally, scenario 3 corresponds
151
Table 6.2: Number of connected users for each cell for different loading scenarios
Scenario 1 Scenario 2 Scenario 3In-building system 40 60 150
Macrocell 150 60 40
to the case when the in-building system is highly loaded and the macrocell is the one
with low number of users, for example when there are sporting events in building B
on a Saturday evening. We have defined the number of users in each scenario based
on observations of the load of the actual systems. Our objective is to evaluate the
capacity of the optimization approach to adapt to different loading conditions.
For each one of the loading scenarios in table 6.2, we calculated the optimal operat-
ing points for each cluster identified by the clustering algorithm for the measurements
gathered at both buildings. For the calculation of the optimal operating point, the
PIs described in Sect. 6.5.4 were calculated. In Fig. 6.4 we present an example of
the HO failure rate, ping-pong event rate and average achievable data rate for one of
the clusters in building A.
For this specific cluster, there is a high number of HO failures for large values
of the A3 threshold and any value of the TTT, as shown in Fig. 6.4a, this reflects
the occurrence of too late HOs. On the other hand, the occurrence of HO failures
for negative values of the A3 threshold and low values of the TTT indicates the
occurrence of too early HOs. In this case, to minimize HO failures the operating
point should correspond to any of the dark blue areas in Fig. 6.4a, where the failure
rate was zero. Fig. 6.4b shows the ping-pong rate, in this particular case ping-pong
events are occurring for very low values of the TTT and A3 thresholds from -2 to
-4 dB. Finally, in Fig. 6.4c we provide an example of the average achievable data
rate for this cluster. This data rate was calculated assuming loading scenario 1 (i.e.
macrocell highly loaded, in-building system lightly loaded). For this loading scenario,
152
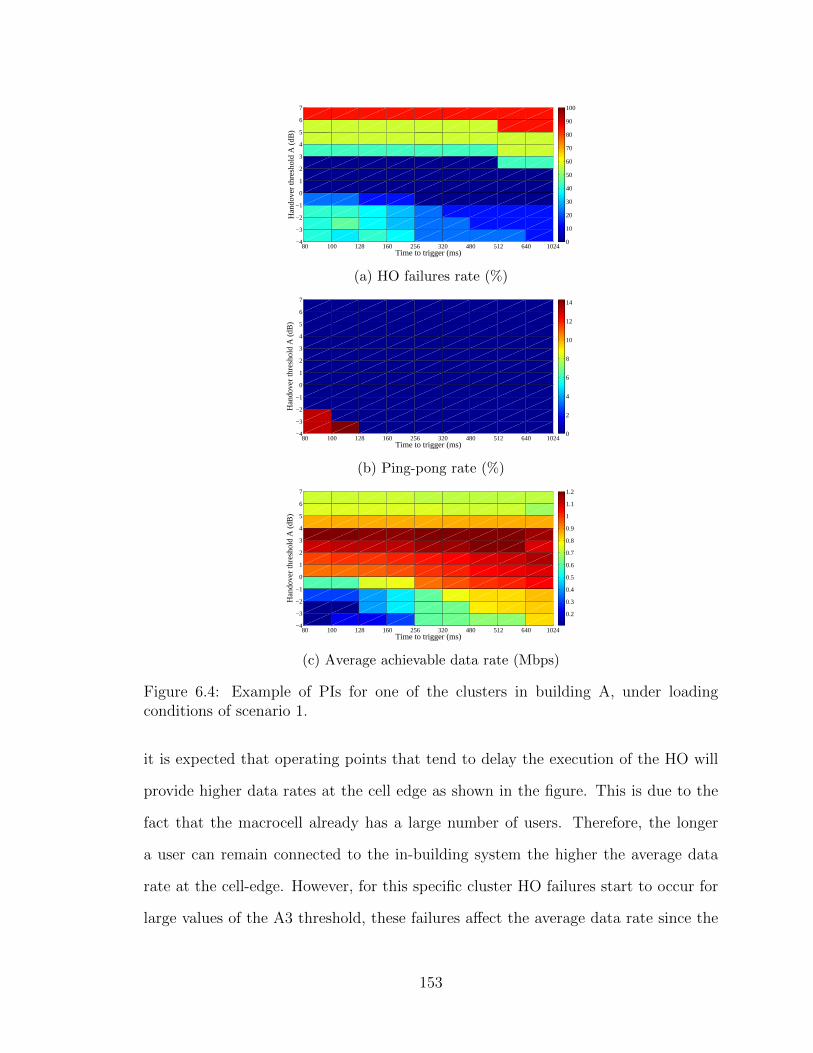
80 100 128 160 256 320 480 512 640 1024−4
−3
−2
−1
0
1
2
3
4
5
6
7
Time to trigger (ms)
Han
dove
r th
resh
old
A (
dB)
0
10
20
30
40
50
60
70
80
90
100
(a) HO failures rate (%)
80 100 128 160 256 320 480 512 640 1024−4
−3
−2
−1
0
1
2
3
4
5
6
7
Time to trigger (ms)
Han
dove
r th
resh
old
A (
dB)
0
2
4
6
8
10
12
14
(b) Ping-pong rate (%)
80 100 128 160 256 320 480 512 640 1024−4
−3
−2
−1
0
1
2
3
4
5
6
7
Time to trigger (ms)
Han
dove
r th
resh
old
A (
dB)
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
(c) Average achievable data rate (Mbps)
Figure 6.4: Example of PIs for one of the clusters in building A, under loadingconditions of scenario 1.
it is expected that operating points that tend to delay the execution of the HO will
provide higher data rates at the cell edge as shown in the figure. This is due to the
fact that the macrocell already has a large number of users. Therefore, the longer
a user can remain connected to the in-building system the higher the average data
rate at the cell-edge. However, for this specific cluster HO failures start to occur for
large values of the A3 threshold, these failures affect the average data rate since the
153
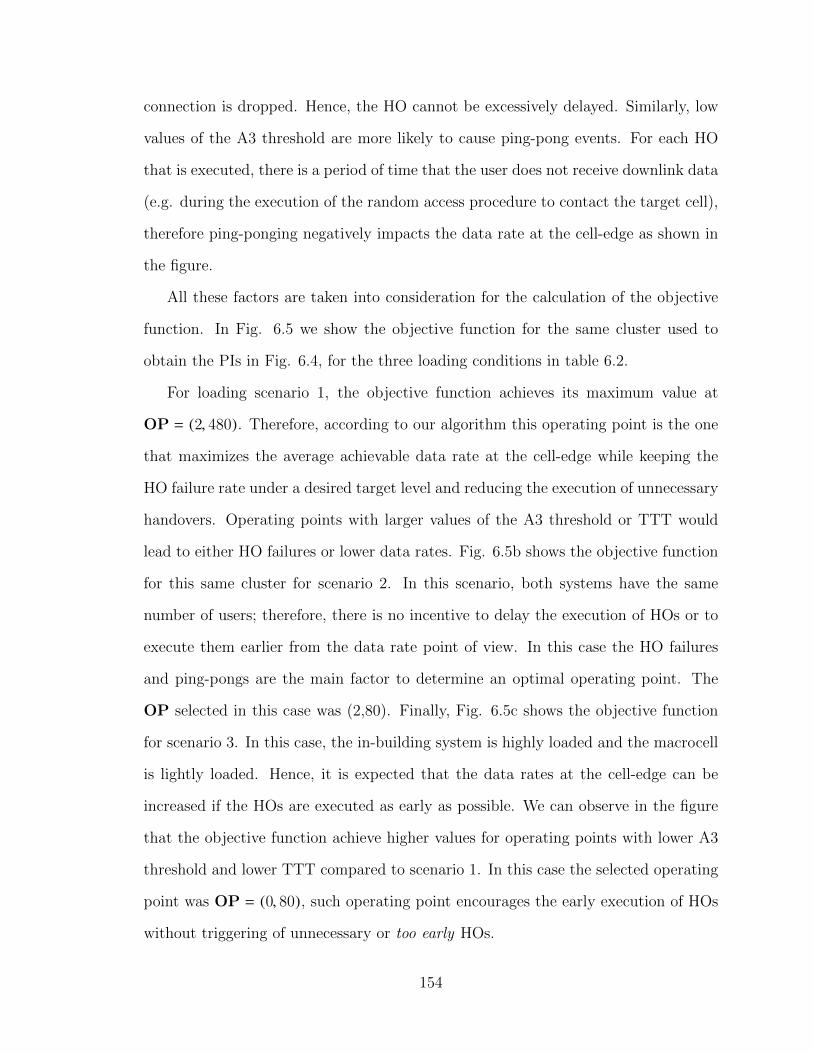
connection is dropped. Hence, the HO cannot be excessively delayed. Similarly, low
values of the A3 threshold are more likely to cause ping-pong events. For each HO
that is executed, there is a period of time that the user does not receive downlink data
(e.g. during the execution of the random access procedure to contact the target cell),
therefore ping-ponging negatively impacts the data rate at the cell-edge as shown in
the figure.
All these factors are taken into consideration for the calculation of the objective
function. In Fig. 6.5 we show the objective function for the same cluster used to
obtain the PIs in Fig. 6.4, for the three loading conditions in table 6.2.
For loading scenario 1, the objective function achieves its maximum value at
OP = (2, 480). Therefore, according to our algorithm this operating point is the one
that maximizes the average achievable data rate at the cell-edge while keeping the
HO failure rate under a desired target level and reducing the execution of unnecessary
handovers. Operating points with larger values of the A3 threshold or TTT would
lead to either HO failures or lower data rates. Fig. 6.5b shows the objective function
for this same cluster for scenario 2. In this scenario, both systems have the same
number of users; therefore, there is no incentive to delay the execution of HOs or to
execute them earlier from the data rate point of view. In this case the HO failures
and ping-pongs are the main factor to determine an optimal operating point. The
OP selected in this case was (2,80). Finally, Fig. 6.5c shows the objective function
for scenario 3. In this case, the in-building system is highly loaded and the macrocell
is lightly loaded. Hence, it is expected that the data rates at the cell-edge can be
increased if the HOs are executed as early as possible. We can observe in the figure
that the objective function achieve higher values for operating points with lower A3
threshold and lower TTT compared to scenario 1. In this case the selected operating
point was OP = (0, 80), such operating point encourages the early execution of HOs
without triggering of unnecessary or too early HOs.
154
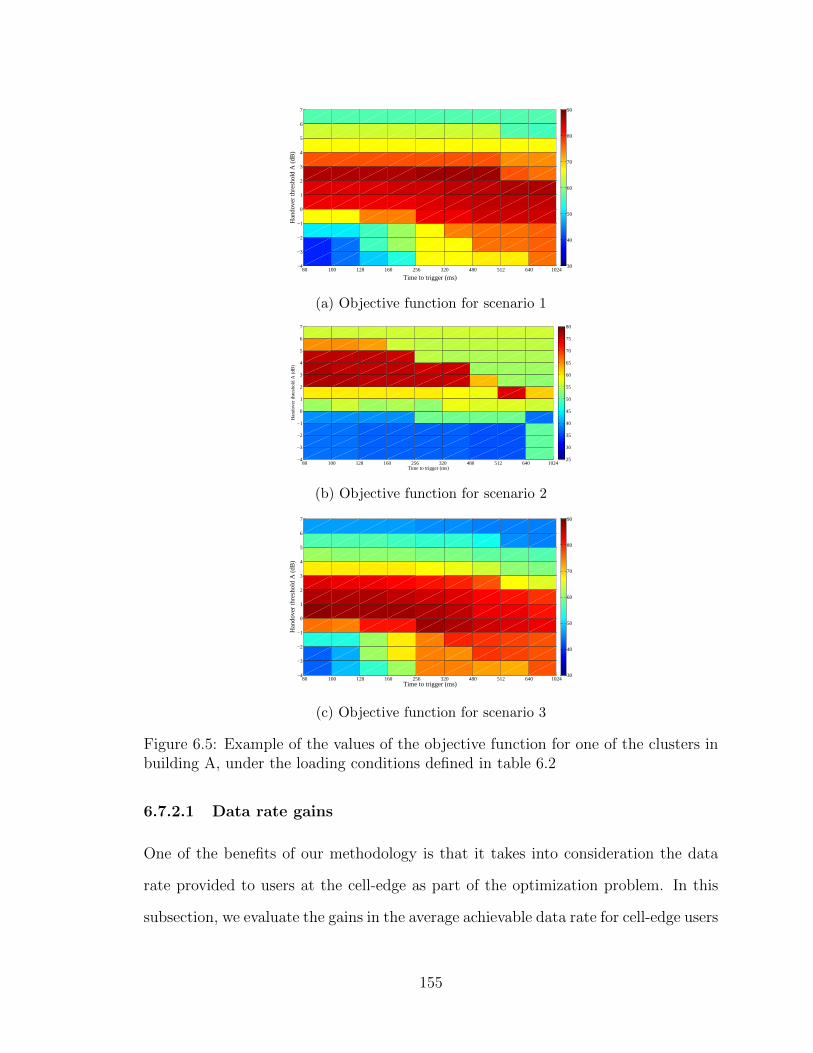
80 100 128 160 256 320 480 512 640 1024−4
−3
−2
−1
0
1
2
3
4
5
6
7
Time to trigger (ms)
Han
dove
r th
resh
old
A (
dB)
30
40
50
60
70
80
90
(a) Objective function for scenario 1
80 100 128 160 256 320 480 512 640 1024−4
−3
−2
−1
0
1
2
3
4
5
6
7
Time to trigger (ms)
Han
dove
r th
resh
old
A (
dB)
25
30
35
40
45
50
55
60
65
70
75
80
(b) Objective function for scenario 2
80 100 128 160 256 320 480 512 640 1024−4
−3
−2
−1
0
1
2
3
4
5
6
7
Time to trigger (ms)
Han
dove
r th
resh
old
A (
dB)
30
40
50
60
70
80
90
(c) Objective function for scenario 3
Figure 6.5: Example of the values of the objective function for one of the clusters inbuilding A, under the loading conditions defined in table 6.2
6.7.2.1 Data rate gains
One of the benefits of our methodology is that it takes into consideration the data
rate provided to users at the cell-edge as part of the optimization problem. In this
subsection, we evaluate the gains in the average achievable data rate for cell-edge users
155
Table 6.3: Operating points used as reference
A3 threshold (dB) TTT (ms)OPA 1 320OPB 2 320OPC 3 320
when the optimal operating point per cluster is applied, compared to the current
approach followed by network operators (i.e. apply a fixed operating point for all
handovers).
For comparison purposes, we have selected three operating points to be used as
reference OPs (see table 6.3). Note that we have selected a fixed value of TTT = 320
ms, this is due to the fact that this value is typically applied by networks operators
for pedestrian environments. The A3 thresholds of the reference OPs take the values
of 1, 2 and 3 dB due to the fact that this are common values for in-building systems.
We calculated the average achievable data rate obtained when each one of the op-
erating points in table 6.3 is applied to all clusters. We then compared the results with
the average achievable data rate obtained with our methodology. This comparison
was carried out for each one of the loading scenarios described in the previous section.
Fig. 6.6 shows the results of this comparison. According to the figure, the highest
gain in average achievable data rate was obtained for scenario 3. This is due to the
fact that the three reference OPs defined in table 6.3 tend to delay the execution of
HOs, in particular OPC. Applying such operating point for scenario 3, i.e. when the
in-building system is highly loaded and the macrocell has a low number of connected
users, provides poor data rates. On the other hand, our methodology provides the
flexibility of adapting the operating point to execute the HO earlier, even allowing
the base station to apply negative values of the A3 threshold when it is reaching con-
gestion. The highest gain in data rate reached a value close to 150% with respect to
156
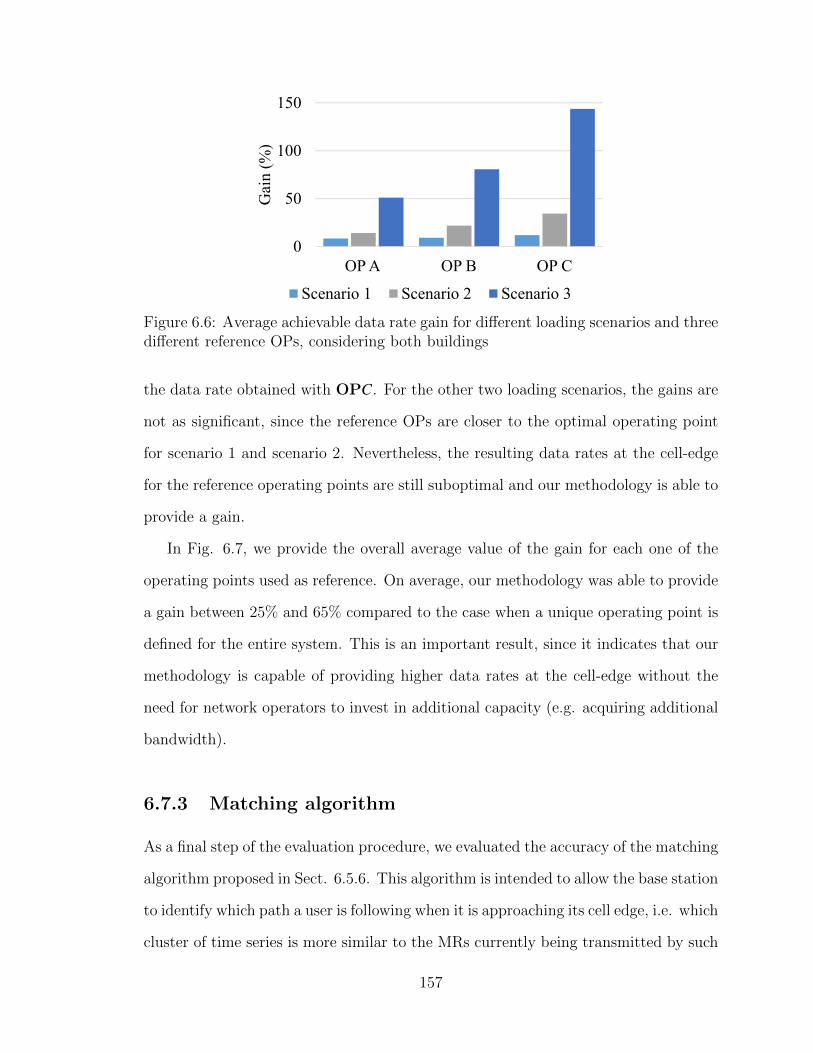
0
50
100
150
OP A OP B OP CG
ain
(%
)
Scenario 1 Scenario 2 Scenario 3
Figure 6.6: Average achievable data rate gain for different loading scenarios and threedifferent reference OPs, considering both buildings
the data rate obtained with OPC. For the other two loading scenarios, the gains are
not as significant, since the reference OPs are closer to the optimal operating point
for scenario 1 and scenario 2. Nevertheless, the resulting data rates at the cell-edge
for the reference operating points are still suboptimal and our methodology is able to
provide a gain.
In Fig. 6.7, we provide the overall average value of the gain for each one of the
operating points used as reference. On average, our methodology was able to provide
a gain between 25% and 65% compared to the case when a unique operating point is
defined for the entire system. This is an important result, since it indicates that our
methodology is capable of providing higher data rates at the cell-edge without the
need for network operators to invest in additional capacity (e.g. acquiring additional
bandwidth).
6.7.3 Matching algorithm
As a final step of the evaluation procedure, we evaluated the accuracy of the matching
algorithm proposed in Sect. 6.5.6. This algorithm is intended to allow the base station
to identify which path a user is following when it is approaching its cell edge, i.e. which
cluster of time series is more similar to the MRs currently being transmitted by such
157
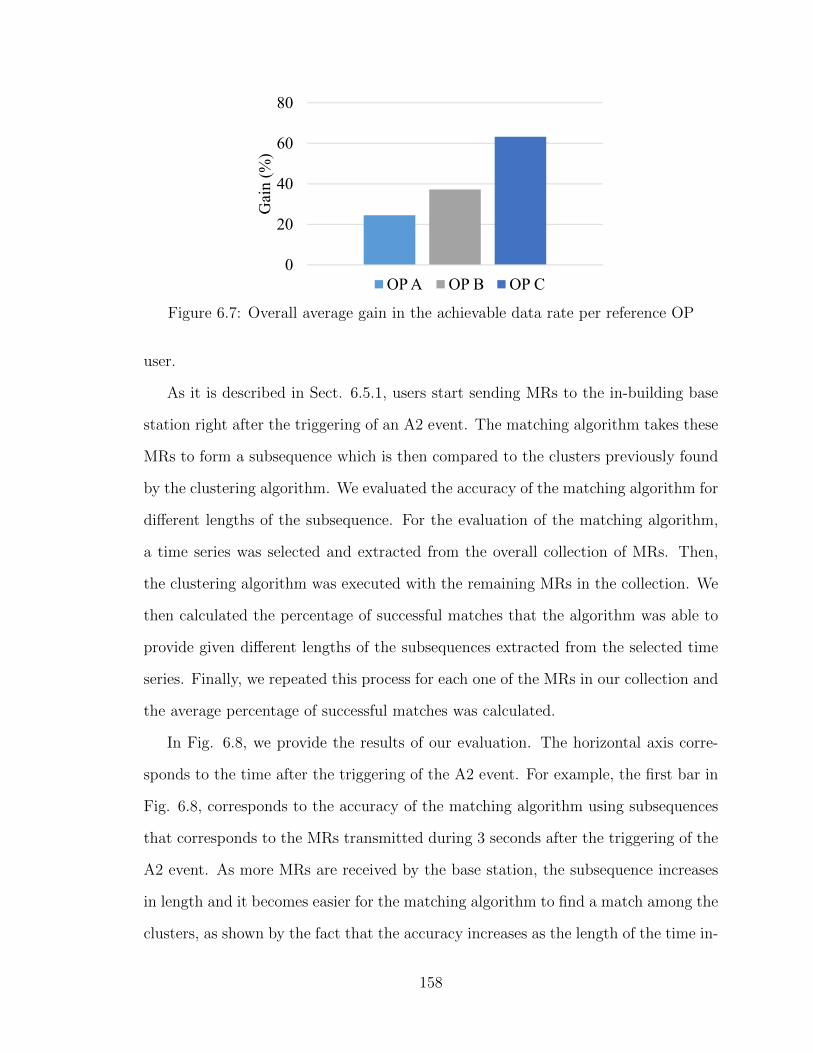
0
20
40
60
80
Gai
n (
%)
OP A OP B OP C
Figure 6.7: Overall average gain in the achievable data rate per reference OP
user.
As it is described in Sect. 6.5.1, users start sending MRs to the in-building base
station right after the triggering of an A2 event. The matching algorithm takes these
MRs to form a subsequence which is then compared to the clusters previously found
by the clustering algorithm. We evaluated the accuracy of the matching algorithm for
different lengths of the subsequence. For the evaluation of the matching algorithm,
a time series was selected and extracted from the overall collection of MRs. Then,
the clustering algorithm was executed with the remaining MRs in the collection. We
then calculated the percentage of successful matches that the algorithm was able to
provide given different lengths of the subsequences extracted from the selected time
series. Finally, we repeated this process for each one of the MRs in our collection and
the average percentage of successful matches was calculated.
In Fig. 6.8, we provide the results of our evaluation. The horizontal axis corre-
sponds to the time after the triggering of the A2 event. For example, the first bar in
Fig. 6.8, corresponds to the accuracy of the matching algorithm using subsequences
that corresponds to the MRs transmitted during 3 seconds after the triggering of the
A2 event. As more MRs are received by the base station, the subsequence increases
in length and it becomes easier for the matching algorithm to find a match among the
clusters, as shown by the fact that the accuracy increases as the length of the time in-
158

0
20
40
60
80
100
3 3.5 4 4.5 5 5.5A
ccu
racy
(%
)Time from the triggering of A2 event(s)
Figure 6.8: Accuracy of the matching algorithm vs the time after the triggering ofthe A2 event
creases. Based on these results, at least 4 seconds of transmitted MRs from each user
approaching the cell-edge are required to reach a matching accuracy above 90%. The
number of MRs required to reach this accuracy depends on the frequency of trans-
mission of the MRs. In our case, one MR was transmitted every 300 ms; hence, on
average 14 MRs were needed to reach a matching accuracy above 90%. The accuracy
can reach a value close to 100% when this time increases to 5.5 seconds.
6.8 Summary
In this chapter we proposed a methodology that provides in-building base stations
with the flexibility to customize HO parameters to specific radio frequency conditions
at the cell-edge for different loading scenarios. We propose the use of machine learning
and data mining techniques to allow the base stations to autonomously learn and
identify characteristic patterns in the RSRP values as users approach the cell-edge,
and apply optimal HO parameters for each case. Our results show that our clustering
algorithm based on shapelets and wavelet decomposition is capable of accurately
identifying patterns in RSRP measurements reports collected from operational LTE
in-building systems deployed in a university campus. Furthermore, our approach
159
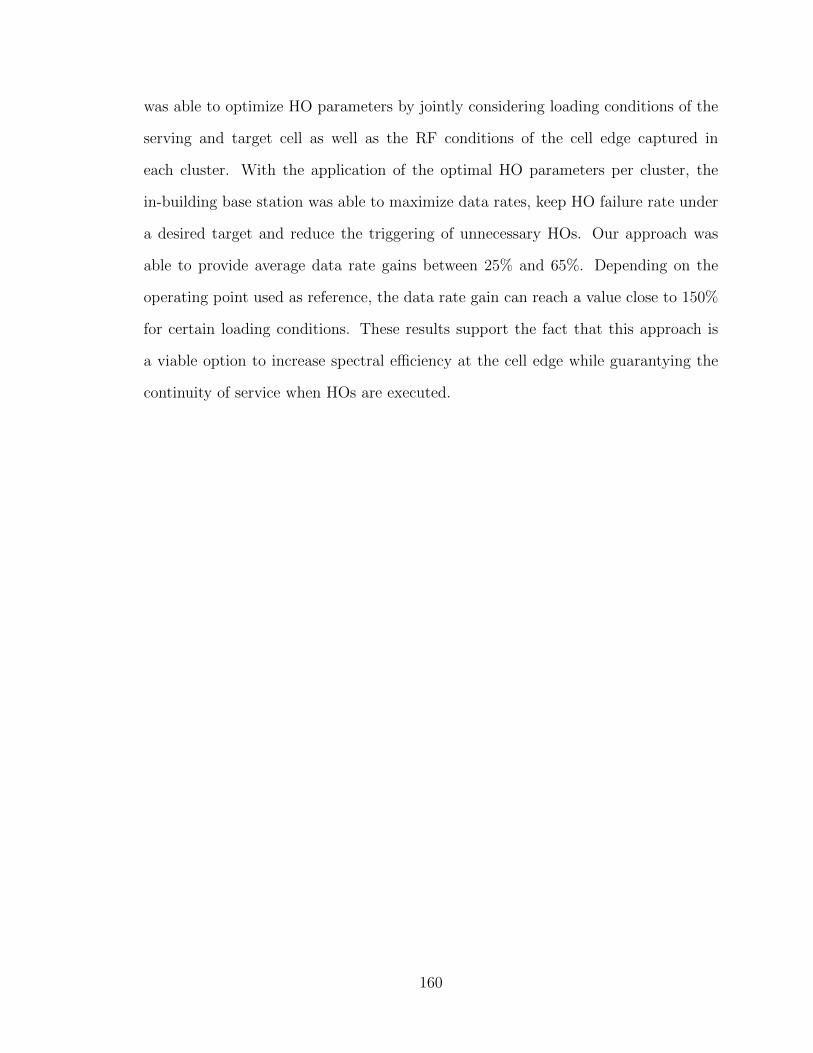
was able to optimize HO parameters by jointly considering loading conditions of the
serving and target cell as well as the RF conditions of the cell edge captured in
each cluster. With the application of the optimal HO parameters per cluster, the
in-building base station was able to maximize data rates, keep HO failure rate under
a desired target and reduce the triggering of unnecessary HOs. Our approach was
able to provide average data rate gains between 25% and 65%. Depending on the
operating point used as reference, the data rate gain can reach a value close to 150%
for certain loading conditions. These results support the fact that this approach is
a viable option to increase spectral efficiency at the cell edge while guarantying the
continuity of service when HOs are executed.
160
Chapter 7
Conclusions
7.1 Summary
Heterogeneous networks are becoming the preferred choice of network operators to
meet the ever increasing demand of data traffic in mobile networks. Such increase
in demand is fueled by the development of bandwidth intensive applications and a
growing number of mobile devices that include smartphones, tablets, laptops and
wearables. The multi-tier network topology in HetNets brings a new series of impor-
tant challenges for network operators. There is a need to increase the understanding
of the operation of these systems and develop new techniques to properly plan, design
and optimize HetNets, since traditional practices applied for macrocell-only networks
do not provide optimal results in this type of network. These new techniques should
focus on the efficient use of resources during network planning, reducing costs of de-
ployments, and facilitating the configuration and maintenance of HetNets. Especially
with the massive increase in network densification expected in the following years, a
situation that will significantly increase the complexity of the network. The research
work described in this thesis has the overall objective of expanding the understanding
and exploring novel solutions to some of these new challenges. We now proceed to
summarize the main contributions of this thesis.
In Chapter 2 we proposed two novel tuning methods, a semi-global and a local
method, to improve the accuracy of a site-specific path loss prediction model based
on the Uniform Theory of Diffraction (UTD). Such site-specific model is intended
to be applied during the planning and design stages of deployments involving out-
161
door microcells. The purpose of these tuning methods is to adaptively adjust the
propagation model parameters according to the propagation conditions at different
locations of the area of interest. As a result, the model parameters are optimized
for different areas of the map. With the traditional tuning methodologies proposed
in the literature, only a single set of model parameters is calculated and applied to
the entire area of interest (i.e. global tuning). We demonstrated that a global tun-
ing procedure is not capable of properly adjusting the path loss model to the actual
physical environment. We showed that tuning the model locally is the best approach
to minimize path loss prediction errors when physical measurements from walk and
drive tests are available. According to our experimental evaluation, tuning the model
locally provides a significant reduction of the overall mean absolute error between
measurements and path loss estimations, such reduction is close to 35% compared
to the case when the model is not tuned. Additionally, the local tuning provided a
substantial reduction of the mean absolute error for the vast majority of our experi-
mental observations. According to the cumulative distribution of the mean absolute
error (MAE), the untuned model presented up to 250% higher MAE compared to
the locally tuned model for the 80th percentile of the observations. In general, the
local tuning procedure outperformed the global and the semi-global tuning methods
for any percentile, for any size of the training set and for any location of the test
transmitter.
The results of this study show that a local tuning of the path loss prediction model
provides a practical and flexible way to optimize the parameters of the propagation
model, since prediction errors are corrected based on very specific local propagation
conditions. Furthermore, from a practical point of view, it is important for network
operators to minimize the time and resources spent collecting walk and drive test
data. Based on our observations, the accuracy of the path loss predictions decrease as
the propagation path becomes more complex. This observation can then be applied
162
to make the collection of measured data more efficient (i.e. data collection efforts
should be concentrated in gathering measurements in areas where it is expected that
the prediction model will be inaccurate). Our local tuning procedure, combined with
the semi-global tuning approach, are aimed at taking advantage of a limited set of
measured data gathered specifically at those strategic locations where the tuning of
the model is most needed.
In Chapter 3, we described and validated an LTE/LTE-A downlink simulator
capable of modeling the walk/speed tests carried out by network operators during
the planning stage of a new cell site. The simulation tool incorporates a realistic
traffic model based on QoS requirements, such requirements are defined according to
the type of traffic that a specific user demands. The simulator was validated with
measurement data collected from a live LTE network, with emphasis on cell-edge
regions. The validation of the simulation tool was focused on two main aspects: the
analysis and modeling of the user experience as mobiles move towards the cell-edge,
and secondly the effects of different loading conditions on the user experience. We
demonstrated that classifying the traffic demand in categories (e.g. according to the
QoS requirements), leads to a substantially more accurate estimation of downlink data
rates as users move; in particular, as users approach the cell-edge and are handed over
to a neighboring cell. We were able to show a superior performance in the modeling
of the walk/speed tests when our QoS traffic model was applied as opposed to the
traditional full buffer model. Our methodology to model walk/speed tests was able
to capture the actual behavior of the data rate during a handover subject to different
loading conditions, as oppose to the full buffer model that tends to significantly under-
estimate the downlink data rate. With our QoS-aware traffic model, we obtained up
to 86% higher accuracy is data rate estimations compared to the traditional full-buffer
model.
In Chapter 4, we proposed a novel and practical distributed load balancing al-
163

gorithm. The main objective of the algorithm was to provide a fair distribution of
the load among base stations in a HetNet. With our algorithm, each base station
can solve locally a load-aware utility maximization problem. Such problem is solved
based on the information of the current eNB’s load level, resource scheduling and
SINR conditions of its associated users. By solving the utility maximization problem
locally, an overloaded base station can determine which users are negatively impact-
ing its sum of the utility, those users are then candidates to be transferred to other
base stations with spare capacity via load-aware handover procedures. The algorithm
was formulated with the objective of minimizing the required amount of coordination
and exchange of information among base stations (e.g. handover triggering), because
an excessive exchange of signaling messages is undesired and leads to an increase in
power consumption. The algorithm was evaluated through a comparative analysis
with two other iterative near-optimal load balancing algorithms based on convex op-
timization. We evaluated the effectiveness of these algorithms considering a typical
two-tier HetNet deployment subject to a realistic traffic distribution. We were able to
show that our algorithm provided similar offloading of users from the macrocell and
almost identical gains in downlink data rates compared to the other near-optimal al-
gorithms. With the main advantage that our algorithm was substantially less complex
and required a minimal amount of exchange of messages among base stations. This
leads to lower levels of coordination and lower impact on the signaling load of the net-
work. Additionally, by reducing the amount of signaling messages exchanged among
base stations, their power consumption is not significantly impacted, as opposed to
the case when the other two load balancing algorithms are applied.
In Chapter 5, we proposed a novel methodology to classify mobile users according
to their trajectory as they leave the coverage area of an in-building system. The
methodology is based on a time series clustering algorithm and its main objective is
to provide indoor base stations with the capability to discover and learn the radio
164
frequency conditions that their users are subject to when they approach the cell-edge,
without actually knowing the physical location of the mobile devices. The key insight
of the approach is to identify similarities among the sets of received signal strength
measurements reported by each user as part of the handover process in LTE systems.
The measurement reports from users following similar trajectories present high levels
of correlation; therefore, this information can be used to determine characteristic pat-
terns in the measurement reports that can be applied to classify users according to
their trajectory. Our methodology is based on a novel time series clustering algorithm
based on shape similarity to identify and classify the characteristic patterns captured
in the reported measurements. We proposed to apply a shape-based technique called
unsupervised-shapelets combined with a multi-resolution wavelet decomposition anal-
ysis. Our simulations considered an LTE network consisting of a macrocell and an in-
door microcell. Our clustering algorithm based on unsupervised-shapelets and multi-
resolution wavelet decomposition (SW) provided superior performance compared to
a DFT-based clustering algorithm. Our algorithm SW was able to provide clustering
results close to 12% more accurate and up to 75% better quality of clusters. On
average, with our methodology we were able to correctly identify and classify the
measurements reports with an accuracy of 92%. This methodology is intended to
increase the capacity of base stations to autonomously learn and discover the radio
frequency conditions of their irregular cell-edge. Furthermore, the methodology is an
essential component of the handover optimization strategy proposed in Chapter 6.
In Chapter 6 we proposed a novel methodology to optimize handover parameters
for in-building systems, with the objective of minimizing handover failures and the
triggering of unnecessary handovers, while maximizing the QoS provided to users ap-
proaching the cell-edge. In the context of self-optimizing networks, with the proposed
methodology we intend to provide base stations with the means to automatically de-
termine suitable handover parameters for each user, such that the continuity of service
165
is guaranteed while maximizing the downlink data rates provided to the user. In other
words, the methodology allows indoor base stations to customize handover parameters
to provide an optimal service at the user level. The key insight behind our methodol-
ogy is the adjustment of the handover parameters (time-to-trigger and received signal
level threshold) based on the knowledge that base stations are able to learn and dis-
cover regarding the RF conditions of their cell-edge. Such knowledge is obtained with
the application of the time series clustering algorithm proposed in Chapter 5. The
handover parameters are optimized by jointly considering the levels of interference at
the cell-edge and the load levels of both, the target and serving cells. An objective
function is defined in terms of four key performance indicators: the handover failure
rate, handover ping-pong rate, number of handovers triggered and the average achiev-
able data rate for each cluster of users following a similar trajectory. Finally, the set
of handover parameters that maximizes the objective function is determined for each
cluster. Based on our experimental results, our approach was able to provide average
data rate gains between 25% and 65%. Depending on the operating point used as
reference, the data rate gain can even reach a value close to 150% for certain loading
conditions. These results support the fact that this approach is a viable option to
increase spectral efficiency at the cell-edge while guarantying the continuity of service
when handovers are executed. To the best of our knowledge, a similar methodology
for the optimization of handover parameters has not been proposed in the literature.
7.2 Future research directions
This thesis has investigated and explored solutions to some of the key challenges in
HetNets, covering aspects from the planning stage to the self-optimization of handover
parameters. Given the fact that network densification will continue to increase in the
following years, it is expected that there will be a need to continue the investigation
166
about the operation of HetNets.
The current tendency among network operators is to bring the base stations closer
to the users, this means that a dramatic increase in the number of indoor base stations
is expected to occur. Therefore, the work proposed in this thesis regarding the tuning
of site-specific models can be extended to include the case of propagation of signals in
indoor environments, particularly in multi-story buildings. Especially considering the
fact that millimeter wave communications (mmWave) combined with massive MIMO
appears to be the next step to deal with spectrum scarcity [96–98].
Additionally, the load balancing problem in HetNets is still not fully understood.
Most of the current load balancing algorithms tend to concentrate on optimizing cell
association with respect to the downlink only. Nowadays, mobile users tend to upload
media content very often as part of their social media activities; therefore, a good
user experience also involves a reliable and fast uplink connection. Hence, further
investigation is required to define suitable cell association rules and load balancing
algorithms that jointly considers both uplink and downlink in co-channel scenarios.
Even considering the case when one base station provides the downlink connection and
other base station is in charge of the uplink connection, in the context of Coordinated
Multi-point communications (CoMP) [99,100].
The role of SON functionalities will become essential for network operators in order
to efficiently deal with a large number of base stations handling a massive number
of users. Our methodology to optimize handover parameters is a good example of
the current tendency in this area, where some of the operational parameters can
be customized at the user level. The application of machine learning techniques
will become a fundamental component in the design and development of new SON
functionalities for the next generation of mobile wireless systems [101]. For example,
the ability to dynamically coordinate the use of non-contiguous spectrum allocations
according to loading conditions in a cooperative way among tiers in HetNets. In
167

general, the paradigm behind traditional SON functionalities has to change from the
current observe and act perspective to a more proactive approach, where predictive
functionalities will be essential, and all of this while keeping energy efficiency as a
one of the primary restrictions.
168

References
[1] 3GPP. (2016, Nov.) Evolved Universal Terrestrial Radio Access Network
(E-UTRAN) - Physical layer procedures. 3GPP. [Online]. Available:
http://www.3gpp.org/dynareport/36-series.htm
[2] Cisco, “Cisco Visual Networking Index: Global Mobile Data Traffic Forecast
Update, 2015-2020,” White paper, Feb. 2016.
[3] D. Ngo and T. Le-Ngoc, Architectures and Interference Management for Small-
Cell Networks. Springer International Publishing, 2014, ch. 1.
[4] S. Brueck, “Heterogeneous networks in LTE-Advanced,” in 2011 8th Interna-
tional Symposium on Wireless Communication Systems (ISWCS), 2011, pp.
171–175.
[5] J. G. Andrews, “Seven ways that HetNets are a cellular paradigm shift,” IEEE
Communications Magazine, vol. 51, no. 3, pp. 136–144, 2013.
[6] V. Chandrasekhar, J. G. Andrews, and A. Gatherer, “Femtocell networks: a
survey,” IEEE Communications Magazine, vol. 46, no. 9, pp. 59–67, Sep. 2008.
[7] D. Liu, L. Wang, Y. Chen, M. Elkashlan, K.-K. Wong, R. Schober, and
L. Hanzo, “User Association in 5G Networks: A Survey and an Outlook,” IEEE
Communications Surveys & Tutorials, vol. 18, no. 2, pp. 1018–1044, 2016.
[8] Y.-C. Wang and C.-A. Chuang, “Efficient eNB deployment strategy for hetero-
geneous cells in 4G LTE systems,” Computer Networks, vol. 79, pp. 297–312,
Mar. 2015.
[9] M. Hata, “Empirical formula for propagation loss in land mobile radio services,”
IEEE Transactions on Vehicular Technology, vol. 29, no. 3, pp. 317–325, Aug.
1980.
[10] Y. Okumura, E. Ohmori, T. Kawano, and K. Fukuda, “Field strength and its
variability in VHF and UHF land-mobile radio service,” Review of the Electrical
Communication Laboratory, vol. 16, no. 9-10, pp. 825–873, 1968.
[11] M. N. Lustgarten and J. A. Madison, “An Empirical Propagation Model (EPM-
73),” IEEE Transactions on Electromagnetic Compatibility, vol. 19, no. 3, pp.
301–309, Aug. 1977.
[12] N. Noe, F. Gaudaire, and D. B. Lo, “Estimating and reducing uncertainties
in ray-tracing techniques for electromagnetic field exposure in urban areas,” in
Topical Conference on Antennas and Propagation in Wireless Communications
(APWC). IEEE, 2013, pp. 652–655.
[13] K. Heiska and A. Kangas, “Microcell propagation model for network planning,”
in Seventh IEEE International Symposium on Personal, Indoor and Mobile Ra-
dio Communications, vol. 1. IEEE, Oct. 1996, pp. 148–152 vol.1.
[14] A. Navarro, D. Guevara, N. Cardona, and J. Lopez, “Measurement-based ray-
tracing models calibration in urban environments,” in Proceedings of the 2012
IEEE International Symposium on Antennas and Propagation. IEEE, Jul.
2012, pp. 1–2.
[15] J. Jemai and T. Kurner, “Towards a Performance Boundary in Calibrating
Indoor Ray Tracing Models,” EURASIP Journal on Wireless Communications
and Networking, vol. 2009, no. 1, pp. 1–8, 2009.
170
[16] B. Y. Hanci and I. H. Cavdar, “Mobile radio propagation measurements and
tuning the path loss model in urban areas at GSM-900 band in Istanbul-
Turkey,” in Vehicular Technology Conference (VTC-Fall), vol. 1, 2004, pp.
139–143 Vol. 1.
[17] L. Juan-Llacer, L. Ramos, and N. Cardona, “Application of some theoretical
models for coverage prediction in macrocell urban environments,” IEEE Trans-
actions on Vehicular Technology, vol. 48, no. 5, pp. 1463–1468, Sep. 1999.
[18] A. Salieto, G. Roig, D. Gomez-Barquero, and N. Cardona, “Radio propagation
models for DVB-H networks,” in Proceedings of the Fourth European Conference
on Antennas and Propagation. IEEE, Apr. 2010, pp. 1–5.
[19] L. Klozar and J. Prokopec, “Propagation path loss models for mobile commu-
nication,” in 21st IEEE International Conference Radioelektronika, Apr. 2011,
pp. 1–4.
[20] A. Tahat and M. Taha, “Statistical tuning of Walfisch-Ikegami propagation
model using Particle Swarm Optimization,” in 2012 19th IEEE Symposium on
Communications and Vehicular Technology in the Benelux (SCVT). IEEE,
Nov. 2012, pp. 1–6.
[21] D. Ambawade, D. Karia, T. Potdar, B. K. Lande, R. D. Daruwala, and A. Shah,
“Statistical Tuning of Walfisch-Ikegami Model in Urban and Suburban En-
vironments,” in 2010 Fourth Asia International Conference on Mathemati-
cal/Analytical Modelling and Computer Simulation. IEEE, May 2010, pp.
538–543.
[22] E. O. Rozal and E. G. Pelaes, “Statistical adjustment of Walfisch-Ikegami model
based in urban propagation measurements,” in International Conference on
Microwave and Optoelectronics. IEEE, Oct. 2007, pp. 584–588.
171

[23] L. Subrt and P. Pechac, “Advanced 3D indoor propagation model: calibra-
tion and implementation,” EURASIP Journal on Wireless Communications
and Networking, vol. 2011, no. 1, pp. 1–10, 2011.
[24] D. Castro-Hernandez and R. Paranjape, “Estimation of coverage areas in mi-
crocells,” in 2013 IEEE International Conference on Advanced Networks and
Telecommunications Systems (ANTS). IEEE, Dec. 2013, pp. 1–6.
[25] H. S. Dhillon, R. K. Ganti, F. Baccelli, and J. G. Andrews, “Modeling and
Analysis of K-Tier Downlink Heterogeneous Cellular Networks,” IEEE Journal
on Selected Areas in Communications, vol. 30, no. 3, pp. 550–560, Apr. 2012.
[26] S. Mukherjee, “Distribution of Downlink SINR in Heterogeneous Cellular Net-
works,” IEEE Journal on Selected Areas in Communications, vol. 30, no. 3, pp.
575–585, Apr. 2012.
[27] Q. Ye, B. Rong, Y. Chen, M. Al-Shalash, C. Caramanis, and J. G. Andrews,
“User Association for Load Balancing in Heterogeneous Cellular Networks,”
IEEE Transactions on Wireless Communications, vol. 12, no. 6, pp. 2706–2716,
Jun. 2013.
[28] K. Shen and W. Yu, “Distributed Pricing-Based User Association for Downlink
Heterogeneous Cellular Networks,” IEEE Journal on Selected Areas in Com-
munications, vol. 32, no. 6, pp. 1100–1113, Jun. 2014.
[29] M. Simsek, M. Bennis, and I. Guvenc, “Mobility management in HetNets: a
learning-based perspective,” EURASIP Journal on Wireless Communications
and Networking, no. 26, 2015.
172
[30] A. Damnjanovic, J. Montojo, J. Cho, H. Ji, J. Yang, and P. Zong, “UE’s role
in LTE advanced heterogeneous networks,” IEEE Communications Magazine,
vol. 50, no. 2, pp. 164–176, Feb. 2012.
[31] L. Hu, L. L. Sanchez, M. Maternia, I. Kovacs, B. Vejlgaard, P. Mogensen,
and H. Taoka, “Heterogeneous LTE-Advanced Network Expansion for 1000x
Capacity,” in Vehicular Technology Conference (VTC Spring). IEEE, Jun.
2013, pp. 1–5.
[32] O. Galinina, S. Andreev, M. Gerasimenko, Y. Koucheryavy, N. Himayat, S.-P.
Yeh, and S. Talwar, “Capturing Spatial Randomness of Heterogeneous Cel-
lular/WLAN Deployments With Dynamic Traffic,” IEEE Journal on Selected
Areas in Communications, vol. 32, no. 6, pp. 1083–1099, Jun. 2014.
[33] J. G. Andrews, S. Singh, Q. Ye, X. Lin, and H. S. Dhillon, “An overview
of load balancing in hetnets: old myths and open problems,” IEEE Wireless
Communications, vol. 21, no. 2, pp. 18–25, Apr. 2014.
[34] 3GPP, “Evolved Universal Terrestrial Radio Access Network (E-
UTRAN),” Technical Standard, 3GPP, 2016. [Online]. Available:
http://www.3gpp.org/dynareport/36-series.htm
[35] I. Guvenc, “Capacity and Fairness Analysis of Heterogeneous Networks with
Range Expansion and Interference Coordination,” IEEE Communications Let-
ters, vol. 15, no. 10, pp. 1084–1087, Oct. 2011.
[36] S. Mishra, A. Sengupta, and S. R. Murthy, “Enhancing the performance of
HetNets via linear regression estimation of Range Expansion Bias,” in IEEE
International Conference on Networks. IEEE, Dec. 2013, pp. 1–6.
173
[37] I. Siomina and D. Yuan, “Load balancing in heterogeneous LTE: Range opti-
mization via cell offset and load-coupling characterization,” in IEEE Interna-
tional Conference on Communications. IEEE, Jun. 2012, pp. 1357–1361.
[38] P. Tian, H. Tian, J. Zhu, L. Chen, and X. She, “An adaptive bias configuration
strategy for Range Extension in LTE-Advanced Heterogeneous Networks,” in
IET International Conference on Communication Technology and Application.
IET, Oct. 2011, pp. 336–340.
[39] K. Kikuchi and H. Otsuka, “Proposal of adaptive control CRE in heterogeneous
networks,” in IEEE International Symposium on Personal, Indoor and Mobile
Radio Communications. IEEE, 2012, pp. 910–914.
[40] B. A. Yasir, G. Su, and N. Bachache, “Range expansion for pico cell in hetero-
geneous LTE - A cellular networks,” in International Conference on Computer
Science and Network Technology. IEEE, Dec. 2012, pp. 1235–1240.
[41] Y. Sun, T. Deng, Y. Fang, M. Wang, and Y. Wu, “A method for pico-specific
upper bound CRE bias setting in HetNet,” in Wireless Communications and
Networking Conference Workshops (WCNCW). IEEE, Apr. 2013, pp. 80–84.
[42] L. Jorguseski, A. Pais, F. Gunnarsson, A. Centonza, and C. Willcock, “Self-
organizing networks in 3GPP: standardization and future trends,” IEEE Com-
munications Magazine, vol. 52, no. 12, pp. 28–34, Dec. 2014.
[43] M. Peng, D. Liang, Y. Wei, J. Li, and H.-H. Chen, “Self-configuration and
self-optimization in LTE-advanced heterogeneous networks,” IEEE Communi-
cations Magazine, vol. 51, no. 5, pp. 36–45, May 2013.
174

[44] D. Aziz, A. Ambrosy, L. T. W. Ho, L. Ewe, M. Gruber, and H. Bakker, “Au-
tonomous neighbor relation detection and handover optimization in LTE,” Bell
Labs Technical Journal, vol. 15, no. 3, pp. 63–83, Dec. 2010.
[45] Y. Watanabe, Y. Matsunaga, K. Kobayashi, H. Sugahara, and K. Hamabe,
“Dynamic Neighbor Cell List Management for Handover Optimization in LTE,”
in Vehicular Technology Conference (VTC Spring). IEEE, May 2011, pp. 1–5.
[46] Z. Guohua, P. Legg, and G. Hui, “A network controlled handover mechanism
and its optimization in LTE heterogeneous networks,” in 2013 IEEE Wireless
Communications and Networking Conference (WCNC). IEEE, Apr. 2013, pp.
1915–1919.
[47] T. Jansen, I. Balan, J. Turk, I. Moerman, and T. Kurner, “Handover Param-
eter Optimization in LTE Self-Organizing Networks,” in Vehicular Technology
Conference Fall (VTC-Fall). IEEE, 2010, pp. 1–5.
[48] G. Hui and P. Legg, “Soft Metric Assisted Mobility Robustness Optimization
in LTE Networks,” in International Symposium on Wireless Communication
Systems. IEEE, Aug. 2012, pp. 1–5.
[49] L. Ewe and H. Bakker, “Base station distributed handover optimization in
LTE self-organizing networks,” in IEEE International Symposium on Personal,
Indoor and Mobile Radio Communications. IEEE, 2011, pp. 243–247.
[50] K. Kitagawa, T. Komine, T. Yamamoto, and S. Konishi, “A handover opti-
mization algorithm with mobility robustness for LTE systems,” in IEEE Inter-
national Symposium on Personal, Indoor and Mobile Radio Communications.
IEEE, 2011, pp. 1647–1651.
175

[51] G. Zhou and P. Legg, “An Evolved Mobility Robustness Optimization Algo-
rithm for LTE Heterogeneous Networks,” in Vehicular Technology Conference
(VTC Spring). IEEE, Jun. 2013, pp. 1–5.
[52] V. Capdevielle, A. Feki, and A. Fakhreddine, “Self-optimization of handover
parameters in LTE networks,” in International Symposium on Modeling & Op-
timization in Mobile, Ad Hoc & Wireless Networks. IEEE, May 2013, pp.
133–139.
[53] W. Gao, B. Jiao, G. Yang, W. Hu, L. Chi, and J. Liu, “Mobility robustness
improvement through transport parameter optimization in HetNets,” in Inter-
national Symposium on Personal, Indoor and Mobile Radio Communications.
IEEE, 2013, pp. 101–105.
[54] R. D. Hegazy and O. A. Nasr, “A user behavior based handover optimization al-
gorithm for LTE networks,” in IEEE Wireless Communications and Networking
Conference (WCNC). IEEE, Mar. 2015, pp. 1255–1260.
[55] B. Sas, K. Spaey, and C. Blondia, “A SON Function for Steering Users in
Multi-Layer LTE Networks Based on Their Mobility Behaviour,” in Vehicular
Technology Conference (VTC Spring). IEEE, May 2015, pp. 1–7.
[56] D. Castro-Hernandez and R. Paranjape, “Local tuning of a site-specific propaga-
tion path loss model for microcell environments,” Journal on Wireless Personal
Communications, 2016, DOI: 10.1007/s11277-016-3489-0.
[57] ——, “A distributed load balancing algorithm for LTE/LTE-A heterogeneous
networks,” in Wireless Communications and Networking Conference Work-
shops. IEEE, Mar. 2015, pp. 380–385.
176
[58] ——, “Comparative analysis of load balancing algorithms for LTE/LTE-A Het-
nets,” in 2015 International Conference on Wireless Communication, Vehicular
Technology, Information Theory and Aerospace and Electronic Systems Tech-
nology (Wireless VITAE). IEEE, Dec. 2015.
[59] ——, “Walk test simulator for LTE/LTE-A network planning,” in International
Telecommunications Network Strategy and Planning Symposium (NETWORKS
2016). IEEE, Sep. 2016.
[60] ——, “Classification of user trajectories in LTE HetNets using unsupervised-
shapelets and multi-resolution wavelet decomposition,” unpublished.
[61] ——, “Optimization of handover parameters for LTE/LTE-A in-building sys-
tems,” unpublished.
[62] K. R. Schaubach and N. J. Davis, “Microcellular radio-channel propagation
prediction,” IEEE Antennas and Propagation Magazine, vol. 36, no. 4, pp. 25–
34, Aug. 1994.
[63] M. Yang, S. Stavrou, and A. K. Brown, “Hybrid ray-tracing model for radio
wave propagation through periodic building structures,” IET Microwaves, An-
tennas & Propagation, vol. 5, no. 3, pp. 340–348, Feb. 2011.
[64] Y.-S. Feng, L.-X. Guo, P. Wang, and Z.-Y. Liu, “Efficient ray-tracing model
for propagation prediction for microcellular wireless communication systems,”
in International Symposium on Antennas, Propagation & EM Theory. IEEE,
Oct. 2012, pp. 432–435.
[65] Y.-K. Yoon, M.-W. Jung, and J. Kim, “Intelligent ray tracing for the propaga-
tion prediction,” in Proceedings of the 2012 IEEE International Symposium on
Antennas and Propagation. IEEE, Jul. 2012, pp. 1–2.
177

[66] F. Puggelli, G. Carluccio, and M. Albani, “A Novel Ray Tracing Algorithm for
Scenarios Comprising Pre-Ordered Multiple Planar Reflectors, Straight Wedges,
and Vertexes,” IEEE Transactions on Antennas and Propagation, vol. 62, no. 8,
pp. 4336–4341, Aug. 2014.
[67] P. Wang, L.-X. Guo, and Y.-S. Feng, “A fast ray-tracing algorithm for microcel-
lular propagation prediction models,” in International Symposium on Antennas,
Propagation & EM Theory. IEEE, Oct. 2012, pp. 436–439.
[68] V. Mohtashami and A. A. Shishegar, “Effects of inaccuracy of material permit-
tivities on ray tracing results for site- specific indoor propagation modeling,” in
Topical Conference on Antennas and Propagation in Wireless Communications.
IEEE, 2013, pp. 1172–1175.
[69] R. G. Kouyoumjian and P. H. Pathak, “A uniform geometrical theory of diffrac-
tion for an edge in a perfectly conducting surface,” Proceedings of the IEEE,
vol. 62, no. 11, pp. 1448–1461, Nov. 1974.
[70] S. Y. Tan and H. S. Tan, “A microcellular communications propagation model
based on the uniform theory of diffraction and multiple image theory,” IEEE
Transactions on Antennas and Propagation, vol. 44, no. 10, pp. 1317–1326, Oct.
1996.
[71] T. S. Rappaport, Wireless Communications: Principles and Practice (2nd Edi-
tion), 2nd ed. Prentice Hall, Jan. 2002.
[72] C. Tzaras and S. R. Saunders, “An improved heuristic UTD solution for
multiple-edge transition zone diffraction,” IEEE Transactions on Antennas and
Propagation, vol. 49, no. 12, pp. 1678–1682, Dec. 2001.
178
[73] M. B. Tabakcioglu and A. Kara, “On the Improvements in Multiple Edge Tran-
sition Zone Diffraction,” in Second European Conference on Antennas and Prop-
agation. IET, Nov. 2007, pp. 1–5.
[74] K. Rizk, R. Valenzuela, D. Chizhik, and F. Gardiol, “Application of the slope
diffraction method for urban microwave propagation prediction,” in Vehicular
Technology Conference, vol. 2. IEEE, May 1998, pp. 1150–1155 vol.2.
[75] K. Benzair, “Measurements and modelling of propagation losses through vege-
tation at 1-4 GHz,” in International Conference on Antennas and Propagation,
vol. 2. IET, Apr. 1995, pp. 54–59 vol.2.
[76] Infovista. (2016, Apr.) Mentum Planet. Infovista. [Online]. Avail-
able: http://www.infovista.com/products/Mentum-Planet-Live-RF-planning-
and-optimization
[77] iBwave. (2016, Apr.) iBwave: In-building network design tool. iBwave.
[Online]. Available: http://www.ibwave.com/
[78] M. Rupp, S. Schwarz, and M. Taranetz, The Vienna LTE-Advanced Simulators.
Singapore: Springer Singapore, 2016.
[79] C. Mehlfuhrer, J. Colom Ikuno, M. Simko, S. Schwarz, M. Wrulich, and
M. Rupp, “The Vienna LTE simulators - Enabling reproducibility in wireless
communications research,” EURASIP Journal on Advances in Signal Process-
ing, vol. 2011, no. 1, 2011.
[80] A. Ghosh, N. Mangalvedhe, R. Ratasuk, B. Mondal, M. Cudak, E. Visotsky,
T. A. Thomas, J. G. Andrews, P. Xia, H. S. Jo, H. S. Dhillon, and T. D.
Novlan, “Heterogeneous cellular networks: From theory to practice,” IEEE
Communications Magazine, vol. 50, no. 6, pp. 54–64, Jun. 2012.
179
[81] M. Kawser, N. I. B. Hamid, N. Hasan, S. Alam, and M. Rahman, “Downlink
SNR to CQI Mapping for Different Multiple Antenna Techniques in LTE,”
International Journal of Information and Electronics Engineering, vol. 2, no. 5,
pp. 756–760, 2012.
[82] B. Soret and K. I. Pedersen, “Centralized and Distributed Solutions for Fast
Muting Adaptation in LTE-Advanced HetNets,” IEEE Transactions on Vehic-
ular Technology, vol. 64, no. 1, pp. 147–158, Jan. 2015.
[83] D. Lopez-Perez, I. Guvenc, and X. Chu, “Mobility management challenges
in 3GPP heterogeneous networks,” IEEE Communications Magazine, vol. 50,
no. 12, pp. 70–78, Dec. 2012.
[84] K. Somasundaram, “Proportional Fairness in LTE-Advanced Heterogeneous
Networks with eICIC,” in Vehicular Technology Conference (VTC Fall), Sept
2013, pp. 1–6.
[85] 3GPP, “TS 36.902: Evolved Universal Terrestrial Radio Access Network (E-
UTRAN); Self-Configuring and Self-Optimizing Network (SON) Use Cases and
Solutions,” 3GPP, Tech. Rep., May 2011.
[86] J. Hills, J. Lines, E. Baranauskas, J. Mapp, and A. Bagnall, “Classification of
time series by shapelet transformation,” Data Mining and Knowledge Discovery,
vol. 28, no. 4, pp. 851–881, 2014.
[87] E. Keogh and C. A. Ratanamahatana, “Exact indexing of dynamic time warp-
ing,” Knowledge and Information Systems, vol. 7, no. 3, pp. 358–386, Mar.
2005.
[88] X. Wang, A. Mueen, H. Ding, G. Trajcevski, P. Scheuermann, and E. Keogh,
“Experimental comparison of representation methods and distance measures
180
for time series data,” Data Mining and Knowledge Discovery, vol. 26, no. 2, pp.
275–309, Feb. 2013.
[89] L. Ye and E. Keogh, “Time series shapelets: a novel technique that allows
accurate, interpretable and fast classification,” Data Mining and Knowledge
Discovery, vol. 22, no. 1-2, pp. 149–182, Jan. 2011.
[90] J. Zakaria, A. Mueen, and E. Keogh, “Clustering Time Series Using
Unsupervised-Shapelets,” in IEEE International Conference on Data Mining.
IEEE, Dec. 2012, pp. 785–794.
[91] J. Macqueen, “Some methods for classification and analysis of multivariate ob-
servations,” in 5th Berkeley Symposium on Mathematical Statistics and Proba-
bility, 1967, pp. 281–297.
[92] A. Graps, “An introduction to wavelets,” IEEE Computational Science and
Engineering, vol. 2, no. 2, pp. 50–61, Feb. 1995.
[93] J. Lin, M. Vlachos, E. Keogh, and D. Gunopulos, “Iterative Incremental Clus-
tering of Time Series,” in Advances in Database Technology, ser. Lecture Notes
in Computer Science, S. B. Heidelberg, Ed. Springer Berlin Heidelberg, 2004,
vol. 2992, pp. 106–122.
[94] K. P. Chan and A. W. Fu, “Efficient time series matching by wavelets,” in
Proceedings of International Conference on Data Engineering, 1999, pp. 126–
133.
[95] D. T. Pham, S. S. Dimov, and C. D. Nguyen, “Selection of K in K-means
clustering,” Journal of Mechanical Engineering Science, vol. 219, pp. 103–119,
2005.
181
[96] T. S. Rappaport, S. Sun, R. Mayzus, H. Zhao, Y. Azar, K. Wang, G. N. Wong,
J. K. Schulz, M. Samimi, and F. Gutierrez, “Millimeter Wave Mobile Commu-
nications for 5G Cellular: It Will Work!” IEEE Access, vol. 1, pp. 335–349,
2013.
[97] Z. Gao, L. Dai, D. Mi, Z. Wang, M. A. Imran, and M. Z. Shakir, “MmWave
massive-MIMO-based wireless backhaul for the 5G ultra-dense network,” IEEE
Wireless Communications, vol. 22, no. 5, pp. 13–21, October 2015.
[98] D. Maamari, N. Devroye, and D. Tuninetti, “Coverage in mmWave Cellular
Networks With Base Station Co-Operation,” IEEE Transactions on Wireless
Communications, vol. 15, no. 4, pp. 2981–2994, April 2016.
[99] D. Ginting, A. Fahmi, and A. Kurniawan, “Performance evaluation of inter-cell
interference of LTE-A system using carrier aggregation and CoMP techniques,”
in International Conference on Telecommunication Systems Services and Ap-
plications, Nov 2015, pp. 1–5.
[100] M. T. Sanij and C. Casetti, “A system-level assessment of Uplink CoMP in
LTE-A Heterogeneous Networks,” in IEEE Annual Consumer Communications
Networking Conference (CCNC), Jan 2016, pp. 188–193.
[101] A. Imran, A. Zoha, and A. Abu-Dayya, “Challenges in 5G: how to empower
SON with big data for enabling 5G,” IEEE Network, vol. 28, no. 6, pp. 27–33,
Nov 2014.
182

Appendix A
System level simulator
A.1 Introduction
In this appendix, we provide a more detailed description of the LTE downlink system
level simulator software used in this thesis. A basic description of the software is
provided in Chapter 3. In this appendix we concentrate on aspects like simulation
parameters, model of the physical environment, network layout, path loss calculation,
link abstraction model and throughput calculation.
A.2 Overview of the simulator
As it was mentioned in Chapter 3, the LTE/LTE-A system level simulator is a Matlab-
based software implemented as a discrete event simulator. Fig. A.1 shows a high level
description of the simulator software.
The block diagram shows the main components of the simulation software. Each
one of these blocks will be described in the following sections.
A.3 Software parameters
Before the execution of the simulation, several parameters have to be defined man-
ually by the user. Three type of parameters are defined: base station, network, and
simulation parameters. These parameters are presented in the tables below. Table
A.1 summarizes the parameters for each base station, table A.2 shows the network
parameters and finally table A.3 summarizes the simulation parameters.
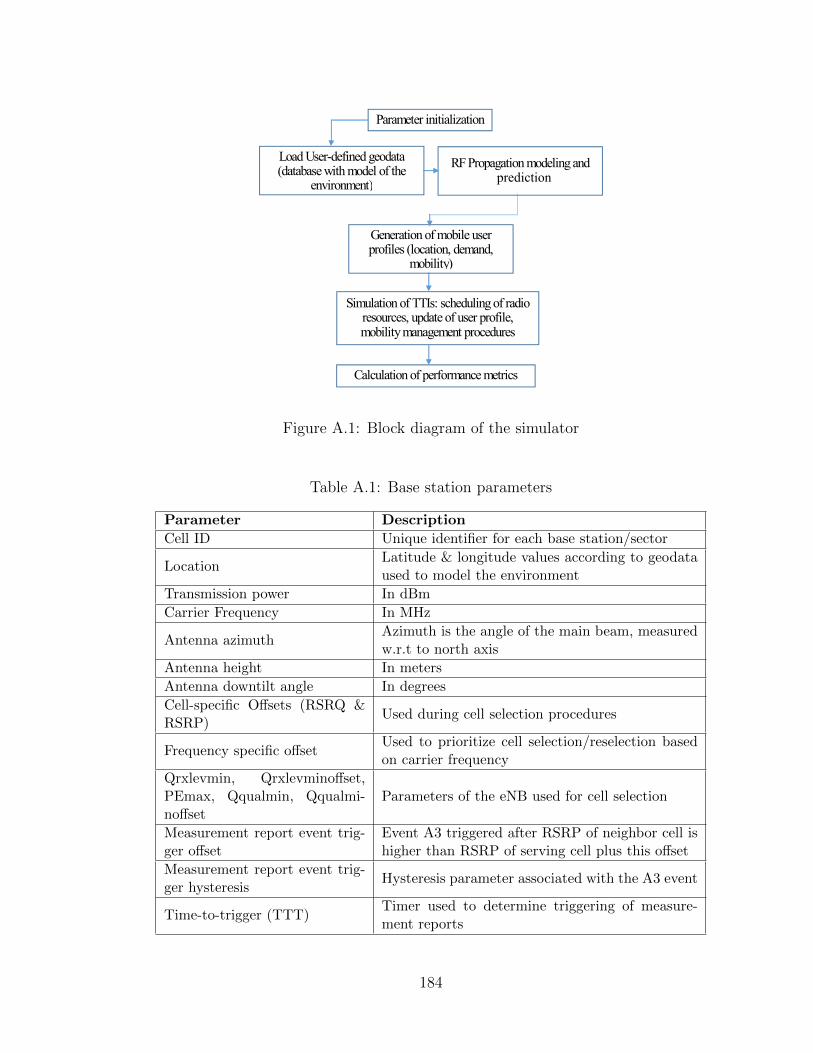
Parameter initialization
Load User-defined geodata(database with model of the
environment)
RF Propagation modeling andprediction
Generation of mobile userprofiles (location, demand,
mobility)
Simulation of TTIs: scheduling of radioresources, update of user profile,mobility management procedures
Calculation of performance metrics
Figure A.1: Block diagram of the simulator
Table A.1: Base station parameters
Parameter Description
Cell ID Unique identifier for each base station/sector
LocationLatitude & longitude values according to geodataused to model the environment
Transmission power In dBm
Carrier Frequency In MHz
Antenna azimuthAzimuth is the angle of the main beam, measuredw.r.t to north axis
Antenna height In meters
Antenna downtilt angle In degrees
Cell-specific Offsets (RSRQ &RSRP)
Used during cell selection procedures
Frequency specific offsetUsed to prioritize cell selection/reselection basedon carrier frequency
Qrxlevmin, Qrxlevminoffset,PEmax, Qqualmin, Qqualmi-noffset
Parameters of the eNB used for cell selection
Measurement report event trig-ger offset
Event A3 triggered after RSRP of neighbor cell ishigher than RSRP of serving cell plus this offset
Measurement report event trig-ger hysteresis
Hysteresis parameter associated with the A3 event
Time-to-trigger (TTT)Timer used to determine triggering of measure-ment reports
184
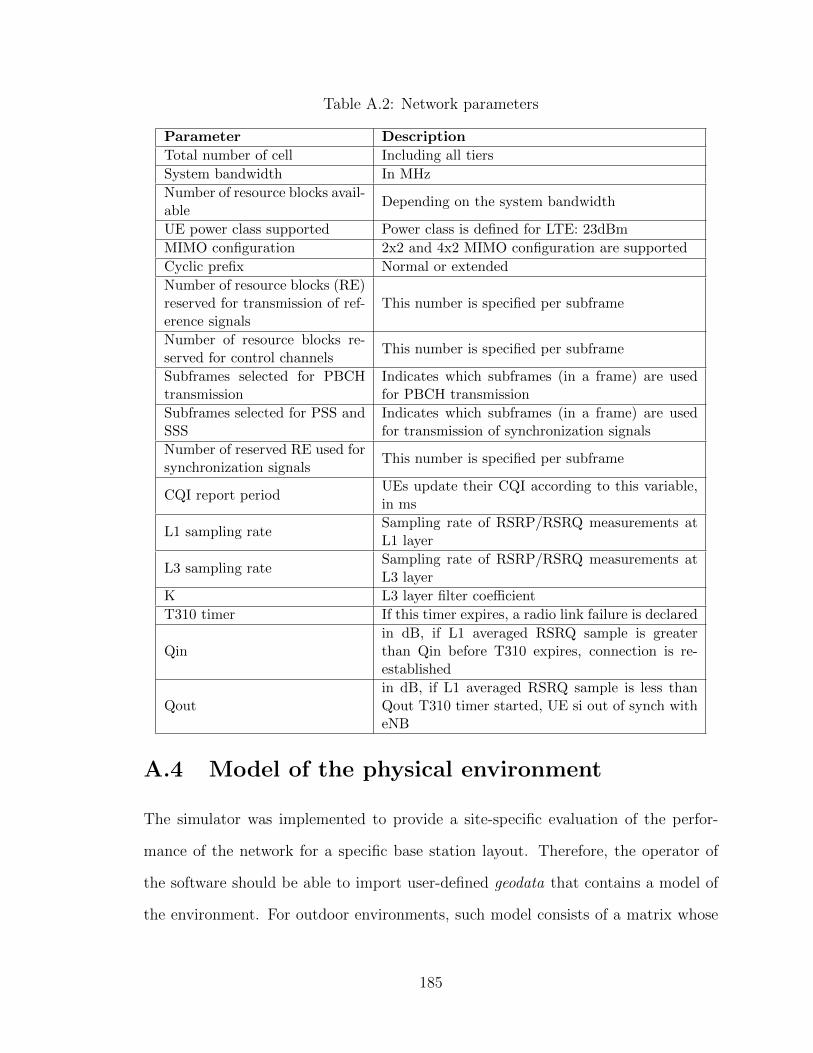
Table A.2: Network parameters
Parameter Description
Total number of cell Including all tiers
System bandwidth In MHz
Number of resource blocks avail-able
Depending on the system bandwidth
UE power class supported Power class is defined for LTE: 23dBm
MIMO configuration 2x2 and 4x2 MIMO configuration are supported
Cyclic prefix Normal or extended
Number of resource blocks (RE)reserved for transmission of ref-erence signals
This number is specified per subframe
Number of resource blocks re-served for control channels
This number is specified per subframe
Subframes selected for PBCHtransmission
Indicates which subframes (in a frame) are usedfor PBCH transmission
Subframes selected for PSS andSSS
Indicates which subframes (in a frame) are usedfor transmission of synchronization signals
Number of reserved RE used forsynchronization signals
This number is specified per subframe
CQI report periodUEs update their CQI according to this variable,in ms
L1 sampling rateSampling rate of RSRP/RSRQ measurements atL1 layer
L3 sampling rateSampling rate of RSRP/RSRQ measurements atL3 layer
K L3 layer filter coefficient
T310 timer If this timer expires, a radio link failure is declared
Qinin dB, if L1 averaged RSRQ sample is greaterthan Qin before T310 expires, connection is re-established
Qoutin dB, if L1 averaged RSRQ sample is less thanQout T310 timer started, UE si out of synch witheNB
A.4 Model of the physical environment
The simulator was implemented to provide a site-specific evaluation of the perfor-
mance of the network for a specific base station layout. Therefore, the operator of
the software should be able to import user-defined geodata that contains a model of
the environment. For outdoor environments, such model consists of a matrix whose
185
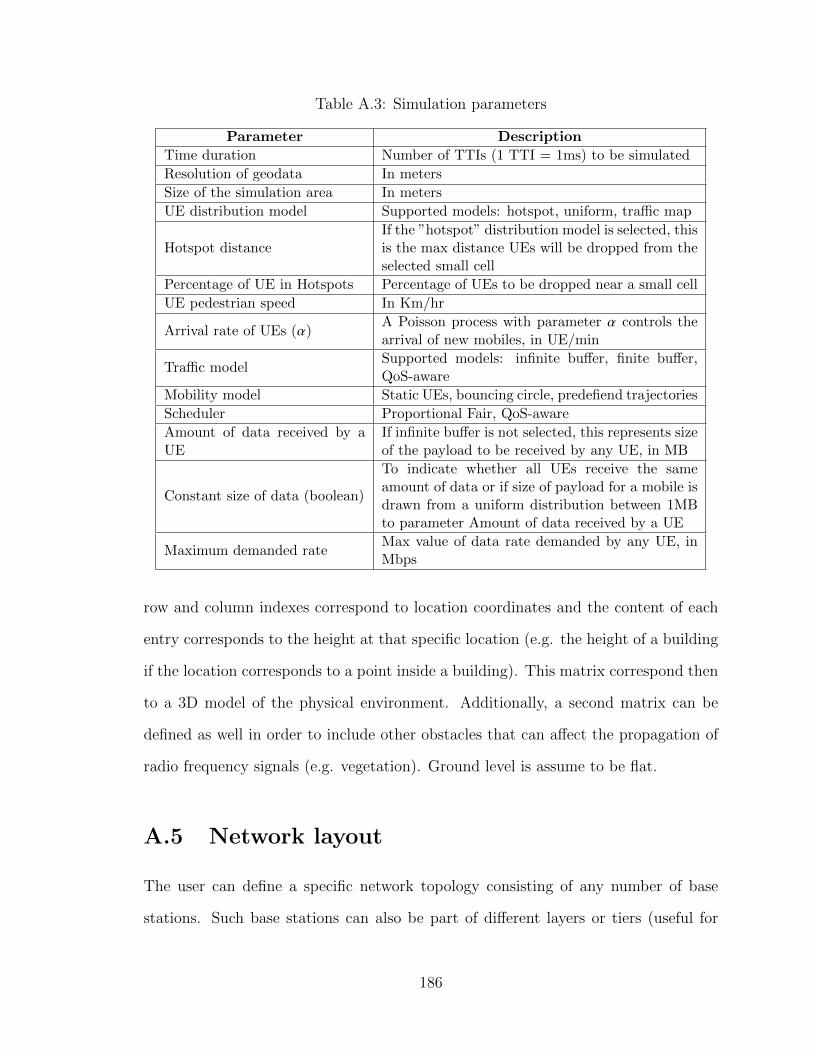
Table A.3: Simulation parameters
Parameter Description
Time duration Number of TTIs (1 TTI = 1ms) to be simulated
Resolution of geodata In meters
Size of the simulation area In meters
UE distribution model Supported models: hotspot, uniform, traffic map
Hotspot distanceIf the ”hotspot” distribution model is selected, thisis the max distance UEs will be dropped from theselected small cell
Percentage of UE in Hotspots Percentage of UEs to be dropped near a small cell
UE pedestrian speed In Km/hr
Arrival rate of UEs (α)A Poisson process with parameter α controls thearrival of new mobiles, in UE/min
Traffic modelSupported models: infinite buffer, finite buffer,QoS-aware
Mobility model Static UEs, bouncing circle, predefiend trajectories
Scheduler Proportional Fair, QoS-aware
Amount of data received by aUE
If infinite buffer is not selected, this represents sizeof the payload to be received by any UE, in MB
Constant size of data (boolean)
To indicate whether all UEs receive the sameamount of data or if size of payload for a mobile isdrawn from a uniform distribution between 1MBto parameter Amount of data received by a UE
Maximum demanded rateMax value of data rate demanded by any UE, inMbps
row and column indexes correspond to location coordinates and the content of each
entry corresponds to the height at that specific location (e.g. the height of a building
if the location corresponds to a point inside a building). This matrix correspond then
to a 3D model of the physical environment. Additionally, a second matrix can be
defined as well in order to include other obstacles that can affect the propagation of
radio frequency signals (e.g. vegetation). Ground level is assume to be flat.
A.5 Network layout
The user can define a specific network topology consisting of any number of base
stations. Such base stations can also be part of different layers or tiers (useful for
186

simulation of HetNets). In order to setup a network layout, the base station parame-
ters presented in table A.1 have to be defined. These parameters include: the number
of base stations, their location, transmission power, carrier frequency, antenna char-
acteristics, and cell selection parameters. Based on these parameters, the software is
able to generate the network topology, such topology combined with the model of the
environment are used to estimate site-specific path losses as described below.
A.6 Path losses
Once the network topology is defined, the simulator runs the propagation prediction
path loss model described in Chapter 2, this model is based on ray tracing principles,
geometrical optics and the Uniform Theory of Diffraction (UTD). The model sup-
ports the calculation of path losses due to multiple rays reaching the receiver due to
reflections and diffractions. For receivers located indoors, the user can define a value
of penetration loss in dB/m. The same value is assumed for all buildings. The prop-
agation losses are predicted for every location in the map and for every base station
defined by the user. The path loss predictions can be saved to avoid recalculation in
future runs when the network topology remains unchanged.
With the predicted path losses, received signal power from each base station can
be calculated for every location in the map. The received signal power is calculated
based on the radiation patterns of the transmit and receive antennas combined with
the path loss predictions. For base stations, the software supports the use of 3D
patterns provided by the antenna manufacturer. For simplicity, the RSRP (reference
signal received power) is assumed to be equal to the received signal power. With the
results of the received signal power calculations, the simulator proceeds to calculate
the values of the SINR for every location in the map and for every base station. No
statistical model is applied to generate shadow nor small-scale fading, it is assumed
187
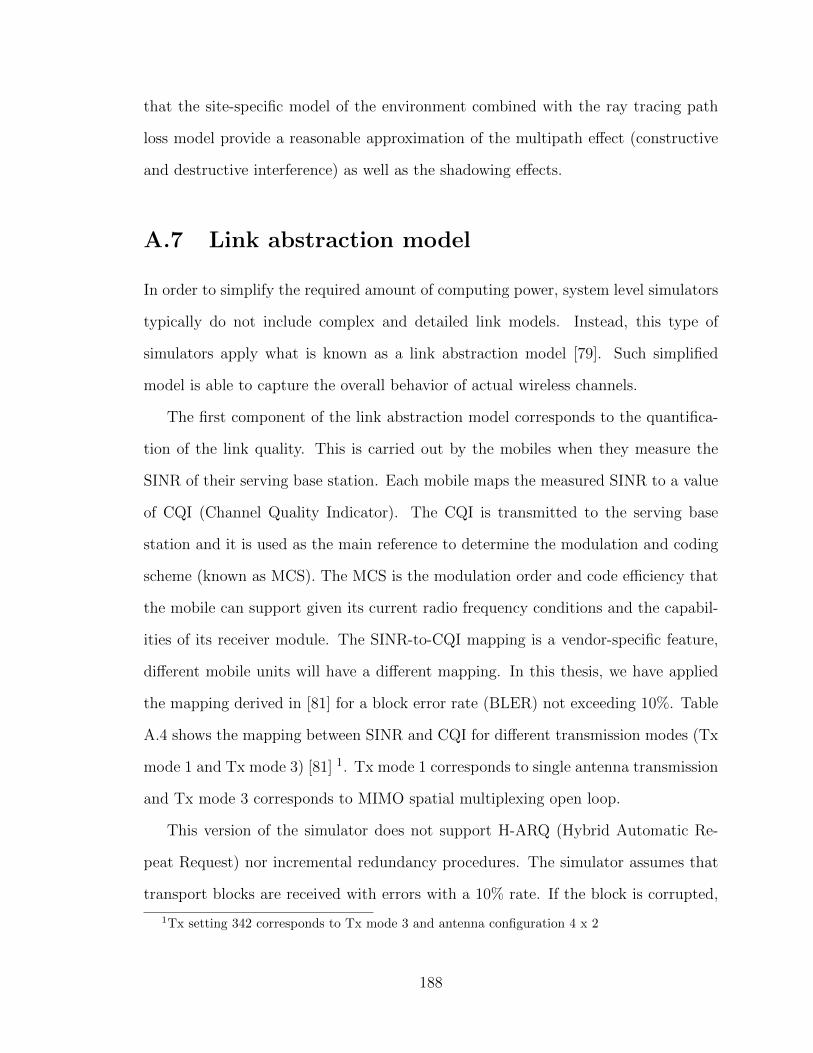
that the site-specific model of the environment combined with the ray tracing path
loss model provide a reasonable approximation of the multipath effect (constructive
and destructive interference) as well as the shadowing effects.
A.7 Link abstraction model
In order to simplify the required amount of computing power, system level simulators
typically do not include complex and detailed link models. Instead, this type of
simulators apply what is known as a link abstraction model [79]. Such simplified
model is able to capture the overall behavior of actual wireless channels.
The first component of the link abstraction model corresponds to the quantifica-
tion of the link quality. This is carried out by the mobiles when they measure the
SINR of their serving base station. Each mobile maps the measured SINR to a value
of CQI (Channel Quality Indicator). The CQI is transmitted to the serving base
station and it is used as the main reference to determine the modulation and coding
scheme (known as MCS). The MCS is the modulation order and code efficiency that
the mobile can support given its current radio frequency conditions and the capabil-
ities of its receiver module. The SINR-to-CQI mapping is a vendor-specific feature,
different mobile units will have a different mapping. In this thesis, we have applied
the mapping derived in [81] for a block error rate (BLER) not exceeding 10%. Table
A.4 shows the mapping between SINR and CQI for different transmission modes (Tx
mode 1 and Tx mode 3) [81] 1. Tx mode 1 corresponds to single antenna transmission
and Tx mode 3 corresponds to MIMO spatial multiplexing open loop.
This version of the simulator does not support H-ARQ (Hybrid Automatic Re-
peat Request) nor incremental redundancy procedures. The simulator assumes that
transport blocks are received with errors with a 10% rate. If the block is corrupted,
1Tx setting 342 corresponds to Tx mode 3 and antenna configuration 4 x 2
188
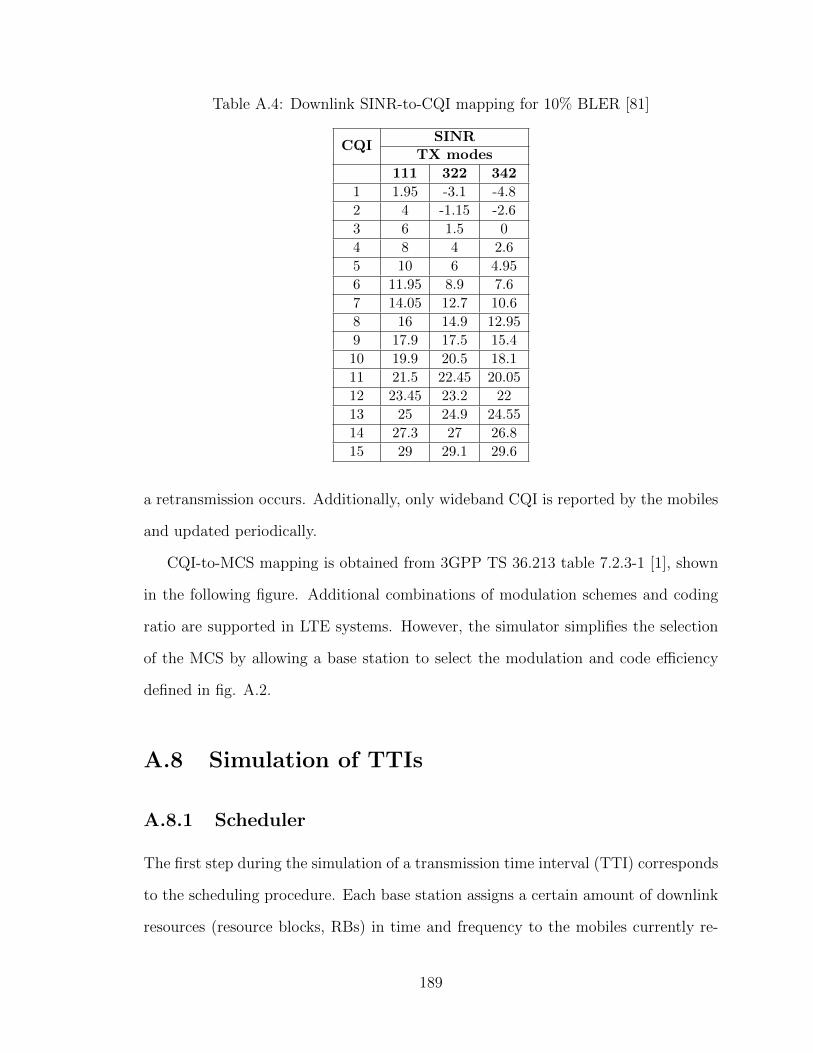
Table A.4: Downlink SINR-to-CQI mapping for 10% BLER [81]
CQISINR
TX modes
111 322 342
1 1.95 -3.1 -4.8
2 4 -1.15 -2.6
3 6 1.5 0
4 8 4 2.6
5 10 6 4.95
6 11.95 8.9 7.6
7 14.05 12.7 10.6
8 16 14.9 12.95
9 17.9 17.5 15.4
10 19.9 20.5 18.1
11 21.5 22.45 20.05
12 23.45 23.2 22
13 25 24.9 24.55
14 27.3 27 26.8
15 29 29.1 29.6
a retransmission occurs. Additionally, only wideband CQI is reported by the mobiles
and updated periodically.
CQI-to-MCS mapping is obtained from 3GPP TS 36.213 table 7.2.3-1 [1], shown
in the following figure. Additional combinations of modulation schemes and coding
ratio are supported in LTE systems. However, the simulator simplifies the selection
of the MCS by allowing a base station to select the modulation and code efficiency
defined in fig. A.2.
A.8 Simulation of TTIs
A.8.1 Scheduler
The first step during the simulation of a transmission time interval (TTI) corresponds
to the scheduling procedure. Each base station assigns a certain amount of downlink
resources (resource blocks, RBs) in time and frequency to the mobiles currently re-
189
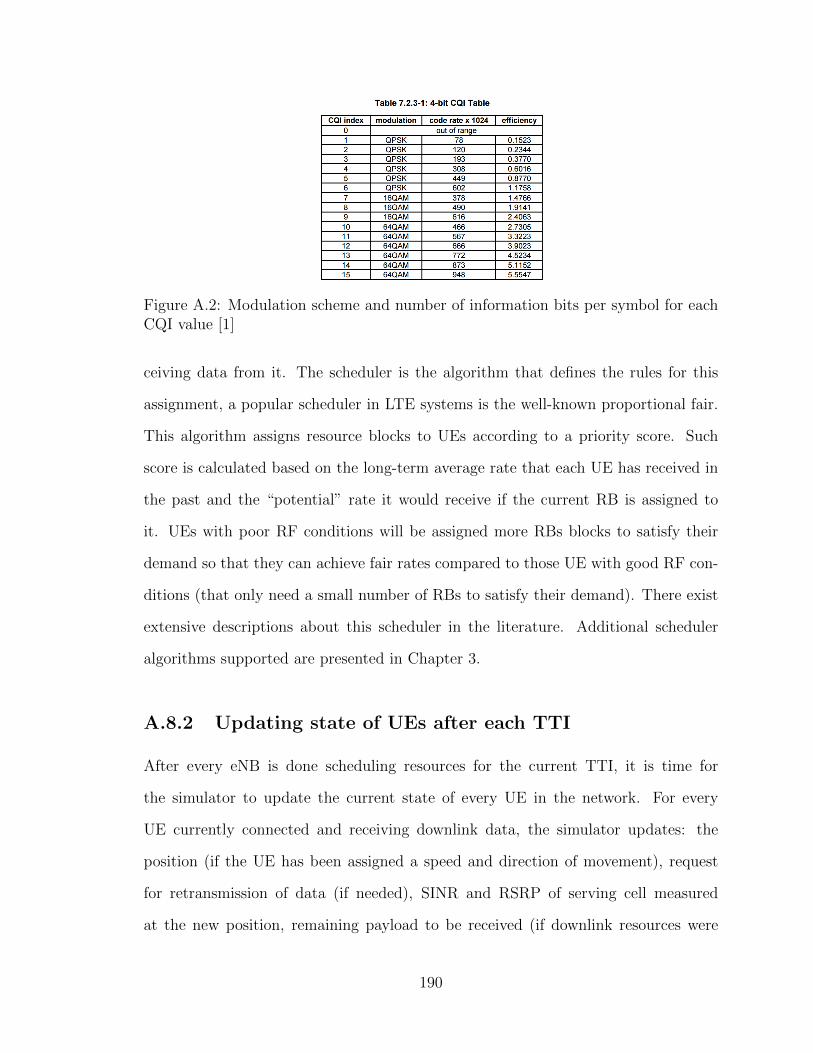
Figure A.2: Modulation scheme and number of information bits per symbol for eachCQI value [1]
ceiving data from it. The scheduler is the algorithm that defines the rules for this
assignment, a popular scheduler in LTE systems is the well-known proportional fair.
This algorithm assigns resource blocks to UEs according to a priority score. Such
score is calculated based on the long-term average rate that each UE has received in
the past and the “potential” rate it would receive if the current RB is assigned to
it. UEs with poor RF conditions will be assigned more RBs blocks to satisfy their
demand so that they can achieve fair rates compared to those UE with good RF con-
ditions (that only need a small number of RBs to satisfy their demand). There exist
extensive descriptions about this scheduler in the literature. Additional scheduler
algorithms supported are presented in Chapter 3.
A.8.2 Updating state of UEs after each TTI
After every eNB is done scheduling resources for the current TTI, it is time for
the simulator to update the current state of every UE in the network. For every
UE currently connected and receiving downlink data, the simulator updates: the
position (if the UE has been assigned a speed and direction of movement), request
for retransmission of data (if needed), SINR and RSRP of serving cell measured
at the new position, remaining payload to be received (if downlink resources were
190
assigned to it), update the CQI value if the CQI-reporting-period has expired, review
of possible triggering of A3 measurement reporting event (for handover operations).
Additionally, the simulator handles the arrival of new UEs based on a Poisson process.
A.9 Throughput calculation
In order to calculate the throughput for a particular UE, the simulator considers the
number of resources blocks allocated to that UE by the scheduler algorithm after a
particular TTI. The number of resource elements (RE) corresponding to the allocated
RBs used for the transmission of information is then determined based on the current
subframe number as well as the frame format selected by the user. Some of the
REs are reserved for the transmission of reference signals, synchronization signals,
broadcast information as well as control signals. Table A.2 shows the parameters
that determine the number of reserved REs. The throughput is then calculated with
(A.1).
T hroughput =# REs used for DL data ∗ info bits per symbol
TTI period(A.1)
Where info bits per symbol are the bits of information per received symbol, this
number is obtained from the table in fig. A.2 according to the reported CQI.
191

Appendix B
Load balancing and adaptiveadjustment of the REB
B.1 Introduction
In this appendix, we investigate the performance of the load balancing algorithm
described in chapter 4 when it is combined with a method to adaptively adjust the
REB of small cells in HetNets. The approach was evaluated under realistic conditions
of an urban environment given a real traffic map. Based on system level simulations,
the overall average data rate gain provided by the load balancing algorithm reached
23% with a significant rate gain for users in the 5th percentile, close to 350%. When
the algorithm was combined with the adaptive adjustment of the REB, an additional
average gain of 50% in the average data rate for low rate users was achieved. With
this bias adjustment method each small cell can adapt its own bias without creating
coverage holes or reaching congestion; as opposed to REB algorithms proposed in
[36–41] that calculate a unique value of the bias for all small cells in the same layer
regardless of their location or local load conditions. The sections in this appendix
have been quoted verbatim from our publication in [57].
B.2 Adaptive bias adjustment
Overloaded base stations can offload more users to neighboring base stations by care-
fully adjusting their cell specific offset or range extension bias (REB). Such offset is
used to encourage (or discourage) users to associate to small cells with low trans-
mission power but lower path losses compared to a distant high power macrocell.
Typically, UEs select the base station that satisfies (B.1) [36]:
j = arg maxj
(RSRPi j + γ j ), ∀ j ∈ J (B.1)
Where γ j is the current value of the REB of the jth eNB, with γ j = 0 for macrocells
and γ j ≥ 0 for small cells.
The higher the value of REB, the larger the coverage area of the small cell. For
an overloaded small cell, it is desirable to reduce the value of the bias such that its
coverage area is reduced and less users will tend to select the small cell during their
cell selection/reselection procedure. On the other hand, if a small cell is underloaded,
then it is desired to expand its coverage area by increasing the value of its bias to
attract more users. The adjustment of the bias should be done carefully in order
to avoid coverage holes (setting a value of the bias too low) or increasing cell edge
interference levels (setting a value of the bias too high).
We propose a simple scheme to adjust the value of the bias for overloaded small
cells based when the the load balancing algorithm described in chapter 4 is applied.
Our approach consists in the evaluation of the values of RSRP reported by users
belonging to the set Tj of each overloaded cell as defined in 4.12. Those values of
RSRP were reported by the UEs that were successfully handed over to underloaded
base stations.
Our approach is based on the following observation: if a user i in Tj is located
in the range extension area of an overloaded eNB j, then it is possible to reduce the
value of the bias, such that other UEs located nearby will be encouraged to select the
underloaded base station to which the user i was handed over.
Consider a user i ∈ Tj that was transferred to a target eNB j∗. User i is located
in the range extension area of the overloaded base station j if the following condition
is satisfied:
193
RSRPi j∗ + γ j∗ > RSRPi j (B.2)
Equation (B.2) indicates that user i would select base station j only if the bias
γ j is added to the measured RSRPi j , otherwise it would select base station j∗. This
means that the bias can be reduced accordingly so that other users located nearby
will also select base station j∗ instead of the overloaded eNB j. A tentative value for
γ j can be calculated such that the edge of the range extension area is moved closer
to the position of user i by applying (B.3).
βi = max (RSRPi j∗ + γ j∗ − RSRPi j, 0) (B.3)
The tentative value of the bias β j can be calculated for all users i ∈ Tj located in
the range extension area of base station j. The new bias value for base station j is
given by:
γnewj = mean({βi | βi < γ j, i ∈ Tj }) (B.4)
Additionally, if after decreasing the value of the REB a small cell remains un-
derloaded for a certain number of subframes, then its bias should be increased to
a default value previously set by the operator. This will allow the coverage area of
underloaded cells to expand to their original size and attract more users.
B.3 Performance evaluation
To evaluate the performance of the proposed load balancing algorithm combined
with the adaptive adjustment of the REB, we consider a two-tier HetNet deployed
in a university campus area. The selected campus corresponds to the University of
Regina in Saskatchewan, Canada. A 3D model of the environment, that includes
buildings and vegetation, was generated with a resolution of 1m. A traffic map
194
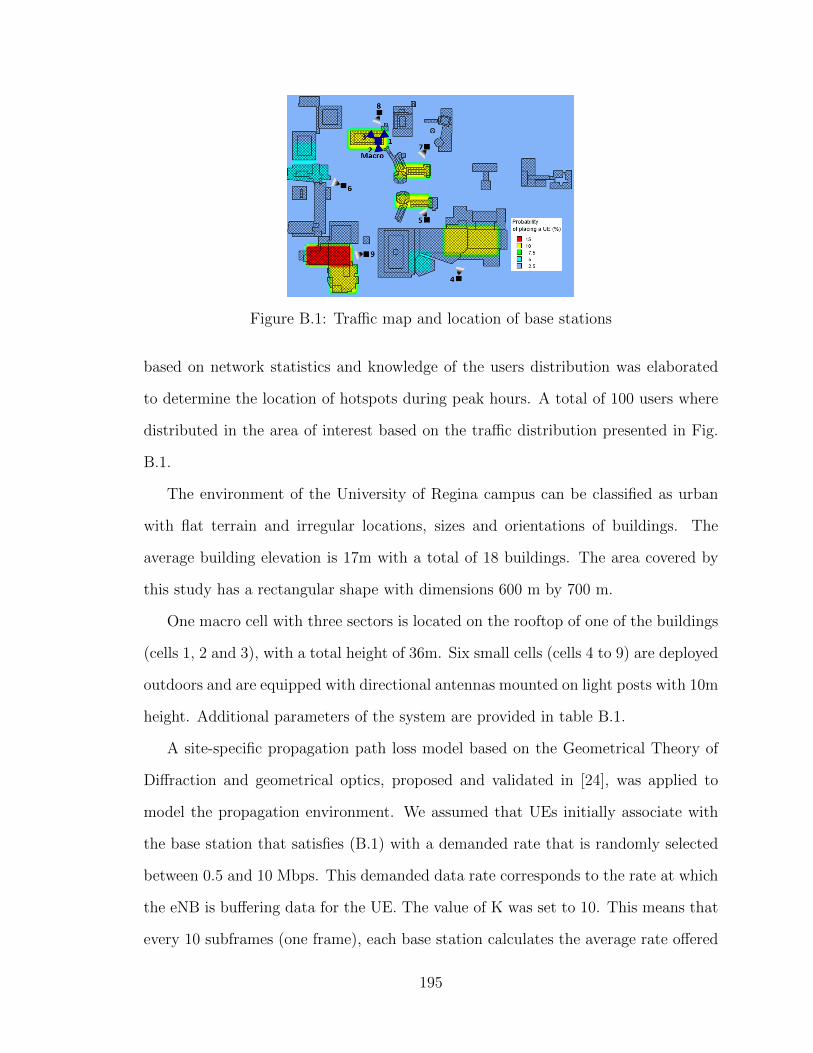
Figure B.1: Traffic map and location of base stations
based on network statistics and knowledge of the users distribution was elaborated
to determine the location of hotspots during peak hours. A total of 100 users where
distributed in the area of interest based on the traffic distribution presented in Fig.
B.1.
The environment of the University of Regina campus can be classified as urban
with flat terrain and irregular locations, sizes and orientations of buildings. The
average building elevation is 17m with a total of 18 buildings. The area covered by
this study has a rectangular shape with dimensions 600 m by 700 m.
One macro cell with three sectors is located on the rooftop of one of the buildings
(cells 1, 2 and 3), with a total height of 36m. Six small cells (cells 4 to 9) are deployed
outdoors and are equipped with directional antennas mounted on light posts with 10m
height. Additional parameters of the system are provided in table B.1.
A site-specific propagation path loss model based on the Geometrical Theory of
Diffraction and geometrical optics, proposed and validated in [24], was applied to
model the propagation environment. We assumed that UEs initially associate with
the base station that satisfies (B.1) with a demanded rate that is randomly selected
between 0.5 and 10 Mbps. This demanded data rate corresponds to the rate at which
the eNB is buffering data for the UE. The value of K was set to 10. This means that
every 10 subframes (one frame), each base station calculates the average rate offered
195
Table B.1: Simulation parameters
Parameter Value
Bandwidth 15 MHz
Carrier freq. Macrocell / microcell 2.1 GHz / 2.6 GHz
Transmit power Macrocell / microcell 47 dBm / 30 dBm
Antenna model macrocell UNNPX306R3
Antenna model microcells S31003U 2600
Antenna pattern 3D (from manufacturer)
Default REB 9 dB
Traffic model Full buffer
Gaussian noise σ2 -174 dBm/Hz
Scheduler Proportional fair
Simulation time 100 ms
to its UEs and executes the proposed load balancing algorithm. The higher the value
of K the slower the adaptation of the load balancing.
For this study, the parameter was arbitrarily set to 1.1. This means that over-
loaded base stations will attempt to reduce their demanded load to no more than
110% of their available bandwidth.
B.3.1 Distribution of users
As it was mentioned before, in our network topology six small cells have been located
to provide coverage to hotspots. Therefore, it is expected that during periods of peak
usage some small cells will likely become overloaded. The initial distribution of users
between underloaded and overloaded cells is presented in Fig. B.2. It can be observed
that 90% of the users are associated with base stations that are overloaded (in our
case: cells 4, 5, 8 and 9). The remaining 10% is associated with underloaded cells
(cells: 1, 2, 3, 6 and 7). After applying the load balancing algorithm, the portion of
users associated with the overloaded cells decreased to 68%, which means that 22%
of users were transferred to underloaded cells.
196

Figure B.2: Distribution of users between overloaded and underloaded eNBs
Table B.2: Fairness indexes of demanded and offered load
Fairness index Without LB With LBDemanded load 0.62 0.9
Offered load 0.52 0.92
B.3.2 Fairness of load balancing
In order to evaluate the performance of the load balancing algorithm, we calculated
the well-known Jain’s fairness index F(L). Where L corresponds to the set of offered
load indexes (or demanded load indexes) of all eNBs. The fairness index has range of
[1/NeN B, 1] , where NeN B is the total number of base stations. A fairness index equal
to unity, indicates that the base stations share the load equally (fair distribution of
the load). The index is calculated according to (B.5).
F (L) =
(∑j∈J L j
)2NeN B ·
∑j∈J
(L j
)2 (B.5)
The fairness index of the offered load and demanded load are shown in table B.2.
When no attempt to balance the load among eNBs is made, the fairness indexes of
the demanded and offered load have poor values of 0.62 and 0.52 respectively. Our
load balancing algorithm was able to distribute the load fairly to achieve values of
fairness indexes around 0.9 and 0.92 for the offered and demanded load respectively.
197
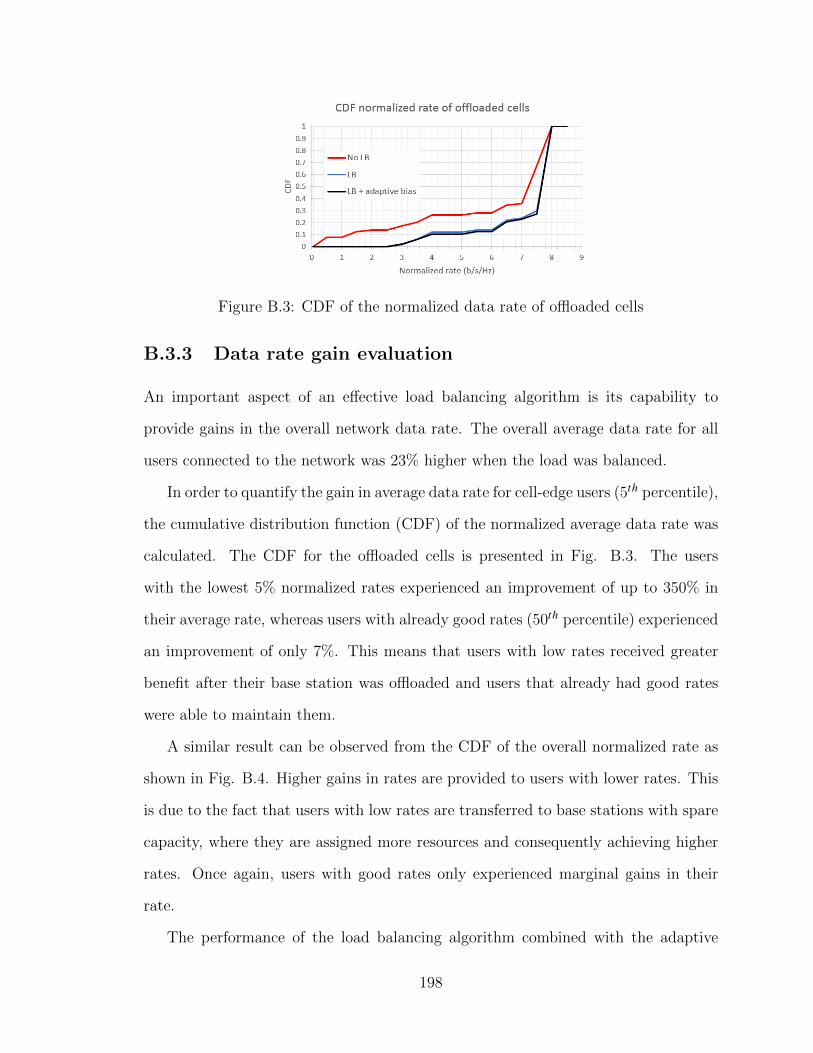
Figure B.3: CDF of the normalized data rate of offloaded cells
B.3.3 Data rate gain evaluation
An important aspect of an effective load balancing algorithm is its capability to
provide gains in the overall network data rate. The overall average data rate for all
users connected to the network was 23% higher when the load was balanced.
In order to quantify the gain in average data rate for cell-edge users (5th percentile),
the cumulative distribution function (CDF) of the normalized average data rate was
calculated. The CDF for the offloaded cells is presented in Fig. B.3. The users
with the lowest 5% normalized rates experienced an improvement of up to 350% in
their average rate, whereas users with already good rates (50th percentile) experienced
an improvement of only 7%. This means that users with low rates received greater
benefit after their base station was offloaded and users that already had good rates
were able to maintain them.
A similar result can be observed from the CDF of the overall normalized rate as
shown in Fig. B.4. Higher gains in rates are provided to users with lower rates. This
is due to the fact that users with low rates are transferred to base stations with spare
capacity, where they are assigned more resources and consequently achieving higher
rates. Once again, users with good rates only experienced marginal gains in their
rate.
The performance of the load balancing algorithm combined with the adaptive
198

Figure B.4: CDF overall normalized data rate for all eNBs
bias adjustment shows an additional average gain of 50% for low data rate users (25th
percentile), compared to the case when only the load balancing algorithm is applied.
B.4 Summary
In this appendix, we described an approach that combines a load balancing algorithm
with an adaptive method to adjust the REB of small cells distributed load balancing
algorithm with adaptive bias adjustment for LTE/LTE-A HetNets. The distributed
algorithm is capable of fairly distributing the load among base stations, requiring a
minimum level of coordination and negligible number of signaling messages between
users and base station. Our simulation results show that a significant gain, around
23%, in the overall average data rate can be achieved. Furthermore, the average data
rate for the low 5% of users is substantially improved with a gain around 350%. The
application of our load balancing algorithm combined with the proposed adaptive
bias adjustment method was able to provide an additional average gain of 50% for
the 25th percentile.
199