Embed Size (px)
Citation preview
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 836749 12 pageshttpdxdoiorg1011552013836749
Research ArticleReliable Control for Time-Varying DelaySwitched Fuzzy Systems with Faulty Actuators Based onObservers Switching Method
Le Zhang and Jinnan Wu
School of Information Engineering Shenyang University Shenyang 110044 China
Correspondence should be addressed to Le Zhang snowise126com
Received 1 April 2013 Accepted 3 June 2013
Academic Editor Rongni Yang
Copyright copy 2013 L Zhang and J WuThis is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper deals with the reliable control problem of nonlinear systems represented by switched fuzzy systems (SFS) with time-varying delay where each subsystem of switched system is a time-varying delay fuzzy system A switched fuzzy system with aTakagi and Sugeno (T-S) fuzzymodel which differs from existing ones is firstly employed to describe a nonlinear systemWhen theactuators are serious failure the residual part of actuators cannot make original system stability using switching technique dependson the states of observers and the fuzzy reliable controller based on measured observers states instead of the original system statesinformation is built The stabilization criterion of the reliable control problem is given for the case that the state of original systemis unmeasurable The multi-Lyapunov functions method is utilized to the stability analysis and controller design for time-varyingdelay switched fuzzy systems with faulty actuators Moreover observers switching strategy achieving estimation errors decreasinguniformly asymptotically to zero of the switched fuzzy systems is considered Finally the stabilization criterion is transformed intothe solvability of sufficient linear matrix inequality (LMI) conditions To illustrate the effectiveness of the proposed stabilizationcriterion and controller design approaches a designed numerical example is studied and some simulations are provided
1 Introduction
With the growing complexity of some control engineeringproblems control techniques drawn from linear theory haveshown their limits Among nonlinear theory new controlapproaches have appeared in the last decades such as fuzzyor hybrid techniques
The fuzzy model-based control has been rapidly devel-oped in recent years [1ndash7] This approach is completelydifferent from typical fuzzy controls [8ndash10] By employingthe Takagi-Sugeno (T-S) fuzzy model [11] which utilizeslocal linear system description for each rule we can devise acontrolmethodology to fully take advantages of linear controltheory A typical design procedure of fuzzy model-basedcontrol consists of two steps
(i) fuzzy model construction for a nonlinear system(ii) fuzzy controller design
Nevertheless an inherent drawback remains since the num-ber of fuzzy rules of a T-S model increase exponentially with
the number of nonlinearities constituting the matched non-linear system This makes controller design and implemen-tation difficult as the complexity of the nonlinear system tobe controlled increases [12] especially for reliable controllerdesign To outline the problem of rules explosion in T-Smodel some authors have proposed to combine the meritof switched systems with T-S models to deal with nonlinearcontrol problems
A combination of hybrid systems and fuzzy multiplemodel systems for the continuous-time case was describedand an idea of the fuzzy switched hybrid control was putforward [13] The new switching fuzzy systems model whichmore approaches the complicated real systems such as mul-tiple nonlinear systems switched nonlinear hybrid systemsand second-order nonholomonic systems was introducedbased on the T-S fuzzymodel [14ndash17]Thismodel is switchingin local fuzzy rule level of the second level according to thepremise variable in region rule level of the first level So asstated in [18] it is switching according to the same premisevariable
2 Mathematical Problems in Engineering
To obtain less conservative stability analysis results thanthe T-S fuzzy model-based control in [19] we proposed aswitched fuzzy (SF)model constructed by the idea ofmultidi-mensional sector nonlinearity [20] and a switching Lyapunovfunction [14] A switched system is said to be a switched fuzzysystem (SFS) if all of its subsystems are fuzzy systems It maywell be found that the results on switched fuzzy systems arevery few Differing from the conventional switching fuzzysystems which are all of two-level architecture the newsystem consists of several subsystems and they switch onoffeach otherThe resulting switched fuzzy system inherits someessential features of hybrid systems [21 22] and maintainsall the information and knowledge representation capacityof fuzzy systems Continuous controllers for all switchedsubsystems and a switching law are designed to give robustasymptotic stability [19] The method provides a kind ofdifferent premise variable switching directly Yang et al havecompared the different features of switching fuzzy systemswith switched fuzzy systems and introduced the sketch mapto illustrate the construction of switched fuzzy system [18]Among the earliest applications of switched fuzzy systemsis the design problem of fuzzy switching control law for ahelicopter in the whole flight envelope [23] Here119867
infincontrol
approach is considered In [24] the switching method forthe fuzzy control of the overhead cranes is presented Oneuses the information of the trolley position load swing andtheir differentiations to derive the proper control signal Theswitching fuzzy algorithm to overcome the condition of dead-zone is especially investigated Authors in [25] propose aswitching control method based on fuzzy energy regionsfor this kind of systems and the control method is appliedto control a two degrees-of-freedom (dofs) under actuatedmanipulator with one active dof and one passive dof Frompreviously mentioned application areas of switched fuzzysystems it can be concluded that these systems are ubiquitousand of significant practical application
It should be noted that since faults and even failuresof control components often occur in real-world controlsystems classical robust control methods may not providesatisfactory performance always and even drive closed-loopsystem unstable A specific control design strategy namedfault tolerant control (FTC) is the most popular methodapplied to systems in the case of unexpected faults andpassive and active approaches to FTC are availableThe activeFTC approach requires a fault detection and diagnosis (FDD)mechanism to detect and identify the faults in real time andthen a mechanism to reconfigure the controllers accordingto the online fault information from the FDD In particularWu and Ho propose a methodology for the design of boththe fuzzy-rule independent and the fuzzy-rule dependentfault detection filters by using a general observer-based faultdetection filter as a residual generator [26] Compared tothe passive approach the active one needs more significantlycomputational power to implement In [27] motivations tostudy controller failures are generalized The first reason isthat the signals are not transmitted perfectly or the controlleritself is not available for example as in the case of packetdropout phenomenon in networked control systems (NCSs)[28] The other is for a positive reason for an economic or
system life consideration where the controller is purposefullysuspended from time to time
Motivated by the aforementioned progress reliable con-trol has acquired wide attention and considerable develop-ments were achieved [29ndash31] Different from traditional con-troller design the objective of this study is to design an appro-priate controller by using the information of residual actua-tors or sensors such that the closed-loop system can toleratethe abnormal operation of some specific control componentsand retain overall system stability with acceptable system per-formance An abnormal operation may include degradationamplification and partial outage In [32] the reliable con-troller design with actuator fault for the attitude control of anorbiting spacecraft equipped with six thrusters is consideredThe application of the reliable control with actuator faultcontrol schemes to the vertical takeoff and landing (VTOL)aircraft system is presented [33] In the aforementionedmanuscripts the following two methods are widely used
(a) The fault model is depicted as a scaling factor Theoutputs of controller without actuator failure are usedas the inputs of controller in which actuator failuresoccurred It is worth noting that these reliable controlmethods are all based on a basic assumption that thenever failed actuators must stabilize the given systemwhich is obviously somehow unpractical
(b) Decompose the matrix B (parameters of the controlinput) into two sets the set of actuators that aresusceptible to failures and the set of actuators that arerobust to failure In other words actuators may sufferldquoserious faultsrdquo and even failures in some of themyet the system can remain stable [34] Motivated bythismethod this paper studies the problem of reliablecontrol where actuators suffer ldquoserious faultsrdquo thattend towards failures and presents a more generalreliable control method
On the other hand in almost all engineering controlsystems such as chemical processes and communicationsystems delays are frequently encountered which affect theperformance of the system adversely including causing insta-bility Hence researchers have been paying remarkable atten-tion to the problems of analysis and synthesis for time delaysystems [4 6 35ndash42] All the existing literature for stabilityanalysis can be roughly divided into two types time constantdelay results [35] and time-varying delay ones [4 6 36ndash42]It is obviously important to establish under what conditionsthe system is still stable subject to the ldquoserious faultsrdquo and thetime-varying delay It is believed in here that a more generalmethod that combines reliable control and switched fuzzycontrol of nonlinear systems whose states are not availablein the sense of employing observers switching is addressed
In this paper the reliable control problem of switchedfuzzy systems is considered for the case that the state ofsystem is unmeasurable The problem begins with therepresentation models for time-varying delay switched fuzzysystem The derivative of time-varying delay is allowed tobe bounded with an unknown constant Both fuzzy reliablecontrollers for subsystems and observers switching laws
Mathematical Problems in Engineering 3
which make switched fuzzy system asymptotic stabilityare designed Sufficient conditions are derived via multipleLyapunov function method The remainder of this paperis organized as follows Section 2 presents an outlinefor switched fuzzy systems model and preliminaries InSection 3 stabilization and the reliable controller arederived An illustrative example is given in Section 4 Finallysome concluding remarks are included in Section 5
2 Model Description and Preliminaries
In this section we present a time-varying delay switchedfuzzy model with faulty actuators The main novelty is thecombination of reliable control and switched fuzzy controlConsider the continuous time-varying delay switched fuzzymodel in which the delays are changed depending on timenamely every subsystem of switched systems is time-varyingdelay fuzzy system
119877119897
120590(119905) if 1205851is 119872119897120590(119905)1sdot sdot sdot and 120585
119901is 119872119897120590(119905)119901 then (1)
(119905) = 119860120590(119905)119897119909 (119905) + 119860
ℎ120590(119905)119897119909 (119905 minus 119889
120590(119905)(119905)) + 119861
120590(119905)119897119906120590(119905)(119905)
(2a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (2b)
119910 (119905) = 119862120590(119905)119897119909 (119905) 119897 = 1 2 119873
120590(119905) (2c)
In here the symbols represent the following 120590 119872 =1 2 119898 is the switching signal to be designed1205851 1205852 120585
119901are the premise variables 119872119897
120590(119905)1 119872
119897
120590(119905)119901
denote fuzzy sets in the 120590th switched subsystem 119877119897120590(119905)
denotethe 119897th fuzzy inference rule in the 120590th switched subsystem119873120590(119905)
is the number of inference rules in the 120590th switchedsubsystem and fuzzy rules are selected in every switchedsubsystem 119906
120590(119905)(119905) is the input variable of the 120590th switched
subsystem 119909(119905) = [1199091(119905) 1199092(119905) sdot sdot sdot 119909
119899(119905)]119879
isin R119899 is the statevariable vector 119860
120590(119905)119897 119860ℎ120590(119905)119897
119861120590(119905)119897
and 119862120590(119905)119897
are knownconstant matrices of appropriate dimensions of the 120590thswitched subsystem 120593(119905) is a continuously differentiablevector-valued initial function and 120591 gt 0 119889
120590(119905)(119905) denote the
time-varying delay of the 120590th switched subsystem satisfyingAssumption 1
Assumption 1 119889120590(119905)(119905) is a differentiable function satisfying
0 le 119889120590(119905)(119905) le 120591 and 119889
120590(119905)(119905) le 119889 lt 1 for some known constant
119889The 119894th switched subsystem is
119877119897
119894 if 1205851is 1198721198971198941sdot sdot sdot and 120585
119901is 119872119897119894119901 then (3)
(119905) = 119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905) (4a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (4b)
119910 (119905) = 119862119894119897119909 (119905) 119894 = 1 119898 119897 = 1 2 119873
119894 (4c)
Therefore the global model of the 119894th switched subsystem isdescribed by
(119905) =
119873119894
sum
119897=1
120578119894119897(120585 (119905)) [119860
119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)]
(5a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (5b)
119910 (119905) =
119873119894
sum
119897=1
120578119894119897(120585 (119905)) 119862
119894119897119909 (119905) 119894 = 1 119898 (5c)
along with
0 le 120578119894119897(120585 (119905)) le 1
119873119894
sum
119897=1
120578119894119897(120585 (119905)) = 1 (6)
in which
120596119894119897(120585 (119905)) =
119901
prod
120588=1
119872119897
119894120588(120585120588(119905)) 120578
119894119897(120585 (119905)) =
120596119894119897(120585 (119905))
sum119873119894
119897=1120596119894119897(120585 (119905))
(7)
where119872119897119894120588(120585120588(119905)) denotes themembership function and 120585
120588(119905)
belongs to the fuzzy set119872119897119894120588
Since the system states often are not directly measurablewe consider the switching signal 120590 = 120590(119909(119905)) which dependson observer states119909(119905) is the observers signal of119909(119905) SupposeΩ1 Ω2 Ω
119898is a partition ofR119899 that is⋃119898
119894=1Ω119894= R119899 0
andΩ119894⋂Ω119895= Φ 119894 = 119895 The design of switching signal is
120590 = 120590 (119909 (119905)) = 119894 [0 +infin) 997888rarr 119872 = 1 2 119898 (8)
which depends on Ω1 Ω2 Ω
119898 When 119909(119905) isin Ω
119894 the
switching signal subjects to
V119894(119909 (119905)) =
1 119909 (119905) isin Ω119894
0 119909 (119905) notin Ω119894119894 isin 119872 (9)
That is if and only if 120590 = 120590(119909(119905)) = 119894 then V119894(119909(119905)) = 1
From V119894(119909(119905)) the system (2a) (2b) and (2c) is repre-
sented by
(119905) =
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905))
times [119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)]
(10a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (10b)
119910 (119905) =
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 119862
119894119897119909 (119905) (10c)
In order to investigate the reliable control problem weclassify actuators of 119894th switched subsystem (5a) (5b) and
4 Mathematical Problems in Engineering
(5c) into two groups [34] One is a set of actuators susceptibleto failures denoted by Θ
119894= 1 2 119896
119894 (119894 = 1 2 119898)
The other is a set of actuators robust to failures denoted byΘ119894= 1 2 119896
119894 minus Θ119894 (119894 = 1 2 119898) Therefore introduce
the decomposition of 119861119894119897as
119861119894119897= 119861Θ119894119897+ 119861Θ119894119897
119894 = 1 2 119898 119897 = 1 2 119873119894 (11)
where 119861Θ119894119897
and 119861Θ119894119897
are gained by making the columnelements of 119861
119894119897which correspond to Θ
119894119897and Θ
119894119897 respectively
zero Chose 120596119894as set of actuators susceptible to failures in
practice 120596119894sube Θ119894 then
119861119894= 119861120596119894+ 119861120596119894 119894 = 1 2 119898 (12)
where 119861120596119894and 119861
120596119894are gained bymaking the column elements
of 119861119894which correspond to 120596
119894and 120596
119894 respectively zero the
following is obvious
119861Θ119894
119861119879
Θ119894
le 119861120596119894119861119879
120596119894
119861120596119894119861119879
120596119894
le 119861Θ119894119861119879
Θ119894
119861119894119897119861119879
119894119897= 119861Θ119894119897119861119879
Θ119894119897
+ 119861Θ119894119897
119861119879
Θ119894119897
119894 = 1 2 119898
(13)
Remark 2 In the existing standard reliable control problemthe condition (119860
119894119897 119861Θ119894119897
) must be a stable pair requisite Thisstrong condition is no longer needed here for switched fuzzysystems because we can design the switching law to make theorigin system stabilizable In fact if (119860
119895119897 119861Θ119895119897
) is a stable pairfor any 119895 isin 119872 then we can design state feedback controllerfor the 119895th subsystem that makes the system (10a) (10b) and(10c) stabilizable
3 Main New Results
In particular the main attention of this paper is concentratedon actuators of switched fuzzy system suffering seriousfailures which has great significance in theoretical studyand engineering applications Moreover according to PDC(Parallel DistributedCompensation) the observers and fuzzyoutput feedback controllers are designed
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119892(120585 (119905))
times [119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)
+119871119894119897[119910 (119905) minus 119862
119894119892119909 (119905)]]
(14a)
119906119894(119905) = minus
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 119870
119894119897119909 (119905) (14b)
It ensures that the system (2a) (2b) and (2c) is globalasymptotic stability where 119909(119905) isin R119899 is state vectors offuzzy observer and 119871
119894119897represents observer gain matrix for
the 119897th fuzzy rule of the 119894th switching subsystem 119871119894119897can
be determined by solving conditions (18) 119870119894119897denote the
controllers feedback gain matrix and 119870119894119897can be determined
by solving controller design conditions (19)In this section we derive the sufficient conditions for
global asymptotic stability of the time-varying delay switchedfuzzy system (2a) (2b) and (2c) Choosing observer error119890(119905) = 119909(119905) minus 119909(119905) we can obtain
(119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905))
times [[119860119894119897minus 119861119894119897119870119894119895] 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+119861119894119897119870119894119895119890 (119905) ]
(15a)
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+119871119894119897119862119894119892119890 (119905) ]
(15b)
119890 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905) + 119860
ℎ119894119897119890 (119905 minus 119889
119894(119905))]
(15c)
Theorem 3 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies the Assumption 1 If there exist con-stants 120573
119894119903(119894 119903 isin 119872) (either all nonnegative or all nonpositive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12058711+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(16)
where lowast denotes the symmetric term where
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
Mathematical Problems in Engineering 5
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(17)
then the closed-loop system (10a) (10b) and (10c) is asymp-totically stable in zero by the reliable controllers (14b) Theparameters of formula (14a) (14b) satisfy
119871119894119897= 120585119894119897119875minus1
119890119862119879
119894119897 119894 = 1 119898 119897 = 1 2 119873
119894 (18)
119870119894119895= 120572119894119895119861119879
Θ119894119895
119875119894 119894 = 1 119898 119895 = 1 2 119873
119894 (19)
Remark 4 The controllers are reliable controller because ofthe controllers feedback gainmatrix119870
119894119897that are the functions
of the actuators failures matrix 119861Θ119894119897
Moreover differing fromtraditional switching system the switching signal (8) in thispaper is dependeny on the state of observer
Proof Without loss of generality suppose 120573119894119903ge 0 For any
119894 isin 119872 if
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (20)
From (16) we can gain
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times Ξ119879
(119905)
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
Ξ (119905) lt 0
(21)
where
Ξ (119905) =
[[[
[
119909 (119905)
119909 (119905 minus 119889119894(119905))
119890 (119905)
119890 (119905 minus 119889119894(119905))
]]]
]
(22)
Obviously for forall119909(119905) isin R119899 0 there certainly is an 119894 isin 119872such that
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (23)
For arbitrary 119894 isin 119872 let
Ω119894= 119909 (119905) isin 119877
119899
0 | 119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872
(24)
then ⋃119898119894=1Ω119894= R119899 0 Further let construct the sets
Ω1= Ω1 Ω
119894= Ω119894minus ⋃119894minus1
119895=1Ω119895 Ω
119898= Ω119898minus ⋃119898minus1
119895=1Ω119895
Obviously we have⋃119898119894=1Ω119894= R119899 0 andΩ
119894capΩ119895= Φ 119894 = 119895
To proceed further choose the Lyapunov functionalcandidate of the following form
119881119894(119909 (119905) 119890 (119905)) = 119881
1(119905) + 119881
2(119905) + 119881
3(119905) + 119881
4(119905)
+ 1198815(119905) + 119881
6(119905)
(25)
where1198811(119909 (119905)) = 119909
119879
(119905) 119875119894119909 (119905)
1198812(119909 (119905)) = int
0
minus120591
int
119905
119905+120579
119909119879
(119904) 119877119894
119909 (119904) 119889119904 119889120579
1198813(119909 (119905)) = int
119905
119905minus119889119894(119905)
119909119879
(119904) 119876119894119909 (119904) 119889119904
1198814(119890 (119905)) = 119890
119879
(119905) 119875119890119890 (119905)
1198815(119890 (119905)) = int
0
minus120591
int
119905
119905+120579
119890119879
(119904) 119877119890119890 (119904) 119889119904 119889120579
1198816(119890 (119905)) = int
119905
119905minus119889119894(119905)
119890119879
(119904) 119876119890119890 (119904) 119889119904
(26)
where 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890are positive definite matrixes
satisfying inequalities (16)Thereafter we will show that under the switching law (8)
along any nonzero solutions of system (2a) (2b) and (2c)119894(119909(119905) 119890(119905)) lt 0 When 119909(119905) isin Ω
119894 from switching law (8)
it is known that the 119894th subsystem of system (10a) (10b) and(10c) is active Thus we have
1(119909 (119905))
= 119909119879
(119905) 119875119894119909 (119905) + 119909
119879
(119905) 119875119894
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 119861119894119897119870119894119895)119879
119875119894+ 119875119894(119860119894119897minus 119861119894119897119870119894119895)] 119909 (119905)
+ 119890119879
(119905) (119871119894119897119862119894119892)119879
119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
6 Mathematical Problems in Engineering
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119875119894+ 119875119894
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)] 119909 (119905) + 119890
119879
(119905) (119871119894119897119862119894119892)119879
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905) + 119909
119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
(27)
Thus it follows further that
2(119909 (119905))
= 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus120591
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119871119894119897119862119894119892119890 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times 119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894] 119909 (119905) + 119909
119879
(119905 minus 119889119894(119905))
times [119860119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
times 119909 (119905 minus 119889119894(119905)) + 119890
119879
(119905)
times [119862119879
119894119892119871119879
119894119897119877119894119871119894119892119862119894119895+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
times119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
(28)
Notice that from Assumption 1 the following can beobtained
3(119909 (119905))
= 119909119879
(119905) 119876119894119909 (119905) minus (1 minus 119889
119894(119905)) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) 119876119894119909 (119905)minus(1 minus 119889
119894) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
(29)
It holds that
4(119890 (119905))
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119890119890 (119905) + 119890
119879
(119905) 119875119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) [(119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)] 119890 (119905)
(30)
From 0 le 119889120590(119905) le 120591 it is clear that
5(119890 (119905))
= 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus120591
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(31)
Mathematical Problems in Engineering 7
It is easy to derive the following
6(119890 (119905))
= 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894(119905)) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
(32)
At this point of the argument we should note that theoutput of the failure actuators is zero for 119908
119894sube Θ119894 Namely
only the residual normal actuators contribute to the time-delay switched fuzzy system It holds true that
119861119894119897119870119894119895= 119861119908119894119897119870119894119895 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894le 119861119908119894119897119870119894119895 (33)
Thus when 119909(119905) isin Ω119894 we have
119894(119909 (119905) 119890 (119905)) =
1(119905) +
2(119905) +
3(119905) +
4(119905)
+ 5(119905) +
6(119905)
(34)
Substituting (27) (28) (29) (30) (31) and (32) into (34)yields
119894(119909 (119905) 119890 (119905)) le Ψ
119894minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(35)
where
Ψ119894= Ξ119879
(119905) Π119894Ξ (119905)
Π119894=
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
(36)
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(37)
From (16) and (35) we know that 119894(119909(119905) 119890(119905)) lt 0
are well defined under the switching law (8) for arbitrary119909(119905) = 0 and 119890(119905) = 0 According to (35) we can concludethat the closed-loop system of (10a) (10b) and (10c) isasymptotically stable via the state-feedback controller (14b)under the switching law (8) when the actuators are seriousfailure and the observer error 119890(119905) asymptotically convergesto zero This ends the proof
Moreover we reformulate (36) into LMI problem Con-sidering (36) andmultiplying both sides of (36) by thematrixdiag119875minus1
119894 119868 119868 119868 (36) can be reformulated as follows
Π119894=
[[[
[
1205741112057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]
]
(38)
12057411= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
+ 120591(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
119877119894(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
+ 120591 (1205761+ 1205762) (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
times (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
) + 119875minus1
119894119876119894119875minus1
119894
12057412= 119860ℎ119894119897
12057413= 119871119894119897119862119894119892
12057422= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
8 Mathematical Problems in Engineering
12057433= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12057434= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12057444= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(39)
We restate as follows
Theorem 5 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies Assumption 1 If there exist constants120573119894119903(119894 119903 isin 119872) (either all nonnegative or all non-positive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12057411+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(40)
where lowast denotes the symmetric term then the closed-loopsystem (10a) (10b) and (10c) is asymptotically stable in zero bythe reliable controllers (14b) The parameters of formulae (14a)and (14b) satisfy (18) and (19)
It should be noted that the stability conditions (40) can betransformed into the linear matrix inequalities by using Schurrsquoscomplement Consider the following
[[[[[[[[[[[[[[[[[[[
[
12059011+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 120590121205901312059014120590150 120590170 0 0 0
lowast 120590220 0 0 0 0 0 0 0 0
lowast lowast 120590330 0 0 0 0 0 0 0
lowast lowast lowast 120590440 0 0 0 0 0 0
lowast lowast lowast lowast 12059055120590560 0 0 0 0
lowast lowast lowast lowast lowast 120590660 0 0 0 0
lowast lowast lowast lowast lowast lowast 12059077120590780 0 0
lowast lowast lowast lowast lowast lowast lowast 12059088120590890 0
lowast lowast lowast lowast lowast lowast lowast lowast 12059099120590910
0
lowast lowast lowast lowast lowast lowast lowast lowast lowast 12059010101205901011
lowast lowast lowast lowast lowast lowast lowast lowast lowast lowast 1205901111
]]]]]]]]]]]]]]]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(41)
where lowast denotes the symmetric term where
12059011= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
12059012= 119875minus1
119894
12059013= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059014= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059015= 119860ℎ119894119897
12059056= 119860119879
ℎ119894119897119877119894
12059017= 119871119894119897119862119894119892
12059078= 119862119879
119894119892119871119879
119894119897
12059089= 119862119879
119894119892119871119879
119894119897119877119894
120590910= (119860119894119897minus 119871119894119897119862119894119892)119879
12059022= minus 119876
119894
minus1
12059033= minus 120591
minus1
119877119894
minus1
12059044= minus
119868
120591 (1205761+ 1205762)
12059055= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897] minus (1 minus 119889
119894) 119876119894
12059066= minus 120591
minus1
1205761119868
12059077= (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12059088= minus 120591
minus1
119877119894
minus1
12059099= minus 120591
minus1
(120576minus1
2+ 120576minus1
3)minus1
119868
1205901010= minus 120591
minus1
119877119890
minus1
1205901011= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
1205901111= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(42)
Mathematical Problems in Engineering 9
Remark 6 The Lyapunov function (34) is multi-Lyapunovcontaining positive definite matrixes 119875
119894 119877119894 119876119894 119875119890 119877119890 and119876
119890
Therewill be somedifficulty to seek positive definitematrixeswhich induce some possible conservativeness different fromthe partition definite matrix method in [38] However weadopt the following methods to overcome the main sourcesof conservativeness
(1) Notice that the stable conditions in Theorem 5 are allof LMI form due to (41) we can solve the problem ofstabilization converting to the LMIsrsquo problem and themethod of augmenting matrix norm is avoided
(2) The maximum delay bound is obtained by solvingLMIs containing variables 119875
119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890
instead of preselecting 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890 Thus
optimizing positive definite matrices in order toobtain a less conservative delay bound can be easilyrealized
4 Illustrative Numerical Example
To illustrate the effectiveness of proposed approach thefollowing switched fuzzy system with time-varying delay isconsidered
1198771
1 if 119911 is 1198721
11 then
(119905) = 11986011119909 (119905) + 119860
ℎ11119909 (119905 minus 119889
1(119905)) + 119861
111199061(119905)
119910 (119905) = 11986211119909 (119905)
1198772
1 if 119911 is 1198722
11 then
(119905) = 11986012119909 (119905) + 119860
ℎ12119909 (119905 minus 119889
1(119905)) + 119861
121199061(119905)
119910 (119905) = 11986212119909 (119905)
1198771
2 if 120575 is 1198721
21 then
(119905) = 11986021119909 (119905) + 119860
ℎ21119909 (119905 minus 119889
2(119905)) + 119861
211199062(119905)
119910 (119905) = 11986221119909 (119905)
1198772
2 if 120575 is 1198722
21 then
(119905) = 11986022119909 (119905) + 119860
ℎ22119909 (119905 minus 119889
2(119905)) + 119861
221199062(119905)
119910 (119905) = 11986222119909 (119905)
(43)
along with system matrices
11986011= [minus45 3
0 2] 119860
12= [minus18 25
0 minus11]
11986021= [15 0
1 minus45] 119860
22= [minus12 0
minus4 minus5]
119860ℎ11= 119860ℎ12= [06 05
0 02] 119860
ℎ21= 119860ℎ22= [01 06
04 03]
11986111= 11986112= [1 2
0 2] 119861
21= 11986122= [2 0
2 5]
119861Θ11
= 119861Θ12
= [1 0
0 0] 119861
Θ21
= 119861Θ22
= [0 0
0 5]
11986211= 11986212= 11986221= 11986222= [2 0]
(44)
It should be noted that (119860119894119897 119861Θ119894119897
) is not a stable pair sys-temmatrices In turn a subsystem is unstablewhen failures ofactuators occur Nonetheless the reliable control problem issolvable via switching between unstable subsystems as provedin the previous section (see Theorem 3) If the time-varyingdelays are chosen as
1198891(119905) = 0003 minus 0003 sin (119905) (45a)
1198892(119905) = 001 minus 001 sin (119905) (45b)
then it is clear that 1198891le 0003 119889
2le 001 and 120591 le 002
The membership functions respectively are chosen as
1205831198721
11
(119911 (119905)) =1
1 + 119890minus2119911(119905) 120583
1198722
11
(119911 (119905)) = 1 minus 1205831198721
11
1205831198721
21
(120575 (119905)) =1
1 + 119890(minus2(120575(119905)minus03)) 120583
1198722
21
(120575 (119905)) = 1 minus 1205831198721
21
(46)
Then the parameters of controllers are defined
12058511= 12058512= 1 120585
21= 12058522= 08 120576
1= 1205762= 1205763= 001
(47)
Define the state observers as
119909 (119905) =
2
sum
119894=1
2
sum
119897=1
2
sum
119895=1
2
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119871119894119897119862119894119892119890 (119905) ]
(48)
upon choosing
12057211= 12057212= 3 120572
21= 12057222= 4
120573119894119903= 1 (119894 119903 = 1 2)
(49)
Solving inequality (16) one can find that
1198751= [02034 minus01141
minus01141 09462] 119875
2= [05998 minus00412
minus00412 15313]
1198771= [03148 minus01214
minus01214 09789] 119877
2= [06112 minus00291
minus00291 09891]
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
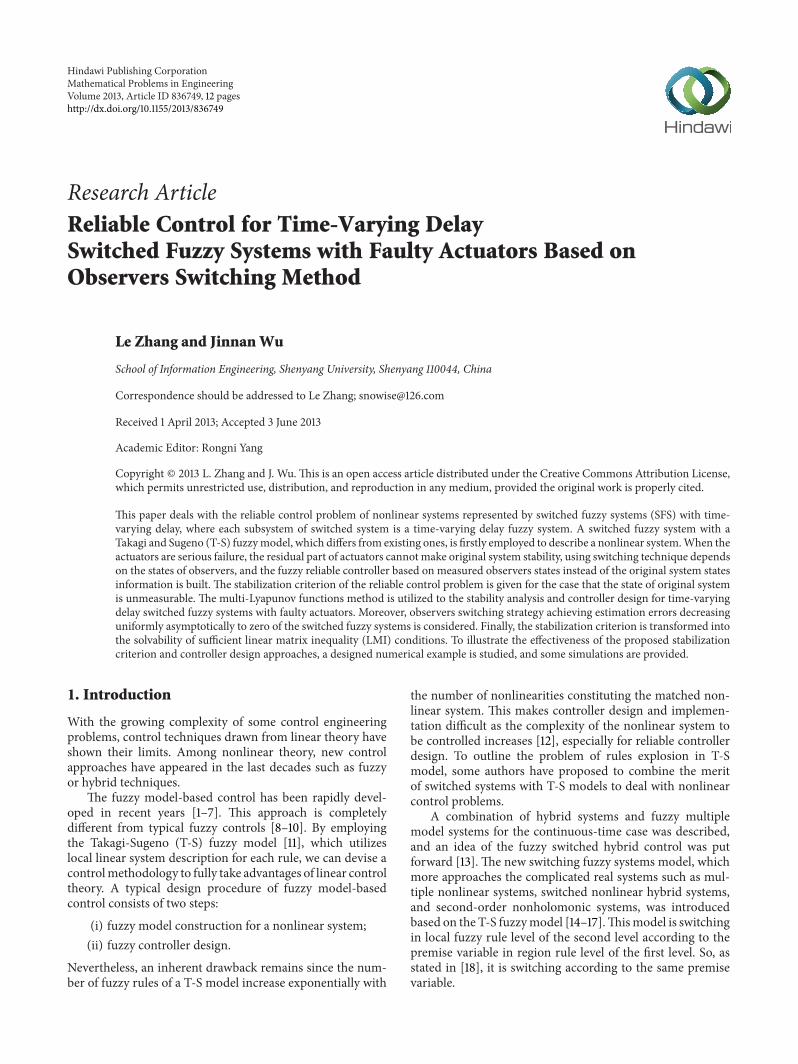
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
To obtain less conservative stability analysis results thanthe T-S fuzzy model-based control in [19] we proposed aswitched fuzzy (SF)model constructed by the idea ofmultidi-mensional sector nonlinearity [20] and a switching Lyapunovfunction [14] A switched system is said to be a switched fuzzysystem (SFS) if all of its subsystems are fuzzy systems It maywell be found that the results on switched fuzzy systems arevery few Differing from the conventional switching fuzzysystems which are all of two-level architecture the newsystem consists of several subsystems and they switch onoffeach otherThe resulting switched fuzzy system inherits someessential features of hybrid systems [21 22] and maintainsall the information and knowledge representation capacityof fuzzy systems Continuous controllers for all switchedsubsystems and a switching law are designed to give robustasymptotic stability [19] The method provides a kind ofdifferent premise variable switching directly Yang et al havecompared the different features of switching fuzzy systemswith switched fuzzy systems and introduced the sketch mapto illustrate the construction of switched fuzzy system [18]Among the earliest applications of switched fuzzy systemsis the design problem of fuzzy switching control law for ahelicopter in the whole flight envelope [23] Here119867
infincontrol
approach is considered In [24] the switching method forthe fuzzy control of the overhead cranes is presented Oneuses the information of the trolley position load swing andtheir differentiations to derive the proper control signal Theswitching fuzzy algorithm to overcome the condition of dead-zone is especially investigated Authors in [25] propose aswitching control method based on fuzzy energy regionsfor this kind of systems and the control method is appliedto control a two degrees-of-freedom (dofs) under actuatedmanipulator with one active dof and one passive dof Frompreviously mentioned application areas of switched fuzzysystems it can be concluded that these systems are ubiquitousand of significant practical application
It should be noted that since faults and even failuresof control components often occur in real-world controlsystems classical robust control methods may not providesatisfactory performance always and even drive closed-loopsystem unstable A specific control design strategy namedfault tolerant control (FTC) is the most popular methodapplied to systems in the case of unexpected faults andpassive and active approaches to FTC are availableThe activeFTC approach requires a fault detection and diagnosis (FDD)mechanism to detect and identify the faults in real time andthen a mechanism to reconfigure the controllers accordingto the online fault information from the FDD In particularWu and Ho propose a methodology for the design of boththe fuzzy-rule independent and the fuzzy-rule dependentfault detection filters by using a general observer-based faultdetection filter as a residual generator [26] Compared tothe passive approach the active one needs more significantlycomputational power to implement In [27] motivations tostudy controller failures are generalized The first reason isthat the signals are not transmitted perfectly or the controlleritself is not available for example as in the case of packetdropout phenomenon in networked control systems (NCSs)[28] The other is for a positive reason for an economic or
system life consideration where the controller is purposefullysuspended from time to time
Motivated by the aforementioned progress reliable con-trol has acquired wide attention and considerable develop-ments were achieved [29ndash31] Different from traditional con-troller design the objective of this study is to design an appro-priate controller by using the information of residual actua-tors or sensors such that the closed-loop system can toleratethe abnormal operation of some specific control componentsand retain overall system stability with acceptable system per-formance An abnormal operation may include degradationamplification and partial outage In [32] the reliable con-troller design with actuator fault for the attitude control of anorbiting spacecraft equipped with six thrusters is consideredThe application of the reliable control with actuator faultcontrol schemes to the vertical takeoff and landing (VTOL)aircraft system is presented [33] In the aforementionedmanuscripts the following two methods are widely used
(a) The fault model is depicted as a scaling factor Theoutputs of controller without actuator failure are usedas the inputs of controller in which actuator failuresoccurred It is worth noting that these reliable controlmethods are all based on a basic assumption that thenever failed actuators must stabilize the given systemwhich is obviously somehow unpractical
(b) Decompose the matrix B (parameters of the controlinput) into two sets the set of actuators that aresusceptible to failures and the set of actuators that arerobust to failure In other words actuators may sufferldquoserious faultsrdquo and even failures in some of themyet the system can remain stable [34] Motivated bythismethod this paper studies the problem of reliablecontrol where actuators suffer ldquoserious faultsrdquo thattend towards failures and presents a more generalreliable control method
On the other hand in almost all engineering controlsystems such as chemical processes and communicationsystems delays are frequently encountered which affect theperformance of the system adversely including causing insta-bility Hence researchers have been paying remarkable atten-tion to the problems of analysis and synthesis for time delaysystems [4 6 35ndash42] All the existing literature for stabilityanalysis can be roughly divided into two types time constantdelay results [35] and time-varying delay ones [4 6 36ndash42]It is obviously important to establish under what conditionsthe system is still stable subject to the ldquoserious faultsrdquo and thetime-varying delay It is believed in here that a more generalmethod that combines reliable control and switched fuzzycontrol of nonlinear systems whose states are not availablein the sense of employing observers switching is addressed
In this paper the reliable control problem of switchedfuzzy systems is considered for the case that the state ofsystem is unmeasurable The problem begins with therepresentation models for time-varying delay switched fuzzysystem The derivative of time-varying delay is allowed tobe bounded with an unknown constant Both fuzzy reliablecontrollers for subsystems and observers switching laws
Mathematical Problems in Engineering 3
which make switched fuzzy system asymptotic stabilityare designed Sufficient conditions are derived via multipleLyapunov function method The remainder of this paperis organized as follows Section 2 presents an outlinefor switched fuzzy systems model and preliminaries InSection 3 stabilization and the reliable controller arederived An illustrative example is given in Section 4 Finallysome concluding remarks are included in Section 5
2 Model Description and Preliminaries
In this section we present a time-varying delay switchedfuzzy model with faulty actuators The main novelty is thecombination of reliable control and switched fuzzy controlConsider the continuous time-varying delay switched fuzzymodel in which the delays are changed depending on timenamely every subsystem of switched systems is time-varyingdelay fuzzy system
119877119897
120590(119905) if 1205851is 119872119897120590(119905)1sdot sdot sdot and 120585
119901is 119872119897120590(119905)119901 then (1)
(119905) = 119860120590(119905)119897119909 (119905) + 119860
ℎ120590(119905)119897119909 (119905 minus 119889
120590(119905)(119905)) + 119861
120590(119905)119897119906120590(119905)(119905)
(2a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (2b)
119910 (119905) = 119862120590(119905)119897119909 (119905) 119897 = 1 2 119873
120590(119905) (2c)
In here the symbols represent the following 120590 119872 =1 2 119898 is the switching signal to be designed1205851 1205852 120585
119901are the premise variables 119872119897
120590(119905)1 119872
119897
120590(119905)119901
denote fuzzy sets in the 120590th switched subsystem 119877119897120590(119905)
denotethe 119897th fuzzy inference rule in the 120590th switched subsystem119873120590(119905)
is the number of inference rules in the 120590th switchedsubsystem and fuzzy rules are selected in every switchedsubsystem 119906
120590(119905)(119905) is the input variable of the 120590th switched
subsystem 119909(119905) = [1199091(119905) 1199092(119905) sdot sdot sdot 119909
119899(119905)]119879
isin R119899 is the statevariable vector 119860
120590(119905)119897 119860ℎ120590(119905)119897
119861120590(119905)119897
and 119862120590(119905)119897
are knownconstant matrices of appropriate dimensions of the 120590thswitched subsystem 120593(119905) is a continuously differentiablevector-valued initial function and 120591 gt 0 119889
120590(119905)(119905) denote the
time-varying delay of the 120590th switched subsystem satisfyingAssumption 1
Assumption 1 119889120590(119905)(119905) is a differentiable function satisfying
0 le 119889120590(119905)(119905) le 120591 and 119889
120590(119905)(119905) le 119889 lt 1 for some known constant
119889The 119894th switched subsystem is
119877119897
119894 if 1205851is 1198721198971198941sdot sdot sdot and 120585
119901is 119872119897119894119901 then (3)
(119905) = 119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905) (4a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (4b)
119910 (119905) = 119862119894119897119909 (119905) 119894 = 1 119898 119897 = 1 2 119873
119894 (4c)
Therefore the global model of the 119894th switched subsystem isdescribed by
(119905) =
119873119894
sum
119897=1
120578119894119897(120585 (119905)) [119860
119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)]
(5a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (5b)
119910 (119905) =
119873119894
sum
119897=1
120578119894119897(120585 (119905)) 119862
119894119897119909 (119905) 119894 = 1 119898 (5c)
along with
0 le 120578119894119897(120585 (119905)) le 1
119873119894
sum
119897=1
120578119894119897(120585 (119905)) = 1 (6)
in which
120596119894119897(120585 (119905)) =
119901
prod
120588=1
119872119897
119894120588(120585120588(119905)) 120578
119894119897(120585 (119905)) =
120596119894119897(120585 (119905))
sum119873119894
119897=1120596119894119897(120585 (119905))
(7)
where119872119897119894120588(120585120588(119905)) denotes themembership function and 120585
120588(119905)
belongs to the fuzzy set119872119897119894120588
Since the system states often are not directly measurablewe consider the switching signal 120590 = 120590(119909(119905)) which dependson observer states119909(119905) is the observers signal of119909(119905) SupposeΩ1 Ω2 Ω
119898is a partition ofR119899 that is⋃119898
119894=1Ω119894= R119899 0
andΩ119894⋂Ω119895= Φ 119894 = 119895 The design of switching signal is
120590 = 120590 (119909 (119905)) = 119894 [0 +infin) 997888rarr 119872 = 1 2 119898 (8)
which depends on Ω1 Ω2 Ω
119898 When 119909(119905) isin Ω
119894 the
switching signal subjects to
V119894(119909 (119905)) =
1 119909 (119905) isin Ω119894
0 119909 (119905) notin Ω119894119894 isin 119872 (9)
That is if and only if 120590 = 120590(119909(119905)) = 119894 then V119894(119909(119905)) = 1
From V119894(119909(119905)) the system (2a) (2b) and (2c) is repre-
sented by
(119905) =
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905))
times [119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)]
(10a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (10b)
119910 (119905) =
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 119862
119894119897119909 (119905) (10c)
In order to investigate the reliable control problem weclassify actuators of 119894th switched subsystem (5a) (5b) and
4 Mathematical Problems in Engineering
(5c) into two groups [34] One is a set of actuators susceptibleto failures denoted by Θ
119894= 1 2 119896
119894 (119894 = 1 2 119898)
The other is a set of actuators robust to failures denoted byΘ119894= 1 2 119896
119894 minus Θ119894 (119894 = 1 2 119898) Therefore introduce
the decomposition of 119861119894119897as
119861119894119897= 119861Θ119894119897+ 119861Θ119894119897
119894 = 1 2 119898 119897 = 1 2 119873119894 (11)
where 119861Θ119894119897
and 119861Θ119894119897
are gained by making the columnelements of 119861
119894119897which correspond to Θ
119894119897and Θ
119894119897 respectively
zero Chose 120596119894as set of actuators susceptible to failures in
practice 120596119894sube Θ119894 then
119861119894= 119861120596119894+ 119861120596119894 119894 = 1 2 119898 (12)
where 119861120596119894and 119861
120596119894are gained bymaking the column elements
of 119861119894which correspond to 120596
119894and 120596
119894 respectively zero the
following is obvious
119861Θ119894
119861119879
Θ119894
le 119861120596119894119861119879
120596119894
119861120596119894119861119879
120596119894
le 119861Θ119894119861119879
Θ119894
119861119894119897119861119879
119894119897= 119861Θ119894119897119861119879
Θ119894119897
+ 119861Θ119894119897
119861119879
Θ119894119897
119894 = 1 2 119898
(13)
Remark 2 In the existing standard reliable control problemthe condition (119860
119894119897 119861Θ119894119897
) must be a stable pair requisite Thisstrong condition is no longer needed here for switched fuzzysystems because we can design the switching law to make theorigin system stabilizable In fact if (119860
119895119897 119861Θ119895119897
) is a stable pairfor any 119895 isin 119872 then we can design state feedback controllerfor the 119895th subsystem that makes the system (10a) (10b) and(10c) stabilizable
3 Main New Results
In particular the main attention of this paper is concentratedon actuators of switched fuzzy system suffering seriousfailures which has great significance in theoretical studyand engineering applications Moreover according to PDC(Parallel DistributedCompensation) the observers and fuzzyoutput feedback controllers are designed
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119892(120585 (119905))
times [119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)
+119871119894119897[119910 (119905) minus 119862
119894119892119909 (119905)]]
(14a)
119906119894(119905) = minus
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 119870
119894119897119909 (119905) (14b)
It ensures that the system (2a) (2b) and (2c) is globalasymptotic stability where 119909(119905) isin R119899 is state vectors offuzzy observer and 119871
119894119897represents observer gain matrix for
the 119897th fuzzy rule of the 119894th switching subsystem 119871119894119897can
be determined by solving conditions (18) 119870119894119897denote the
controllers feedback gain matrix and 119870119894119897can be determined
by solving controller design conditions (19)In this section we derive the sufficient conditions for
global asymptotic stability of the time-varying delay switchedfuzzy system (2a) (2b) and (2c) Choosing observer error119890(119905) = 119909(119905) minus 119909(119905) we can obtain
(119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905))
times [[119860119894119897minus 119861119894119897119870119894119895] 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+119861119894119897119870119894119895119890 (119905) ]
(15a)
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+119871119894119897119862119894119892119890 (119905) ]
(15b)
119890 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905) + 119860
ℎ119894119897119890 (119905 minus 119889
119894(119905))]
(15c)
Theorem 3 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies the Assumption 1 If there exist con-stants 120573
119894119903(119894 119903 isin 119872) (either all nonnegative or all nonpositive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12058711+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(16)
where lowast denotes the symmetric term where
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
Mathematical Problems in Engineering 5
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(17)
then the closed-loop system (10a) (10b) and (10c) is asymp-totically stable in zero by the reliable controllers (14b) Theparameters of formula (14a) (14b) satisfy
119871119894119897= 120585119894119897119875minus1
119890119862119879
119894119897 119894 = 1 119898 119897 = 1 2 119873
119894 (18)
119870119894119895= 120572119894119895119861119879
Θ119894119895
119875119894 119894 = 1 119898 119895 = 1 2 119873
119894 (19)
Remark 4 The controllers are reliable controller because ofthe controllers feedback gainmatrix119870
119894119897that are the functions
of the actuators failures matrix 119861Θ119894119897
Moreover differing fromtraditional switching system the switching signal (8) in thispaper is dependeny on the state of observer
Proof Without loss of generality suppose 120573119894119903ge 0 For any
119894 isin 119872 if
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (20)
From (16) we can gain
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times Ξ119879
(119905)
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
Ξ (119905) lt 0
(21)
where
Ξ (119905) =
[[[
[
119909 (119905)
119909 (119905 minus 119889119894(119905))
119890 (119905)
119890 (119905 minus 119889119894(119905))
]]]
]
(22)
Obviously for forall119909(119905) isin R119899 0 there certainly is an 119894 isin 119872such that
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (23)
For arbitrary 119894 isin 119872 let
Ω119894= 119909 (119905) isin 119877
119899
0 | 119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872
(24)
then ⋃119898119894=1Ω119894= R119899 0 Further let construct the sets
Ω1= Ω1 Ω
119894= Ω119894minus ⋃119894minus1
119895=1Ω119895 Ω
119898= Ω119898minus ⋃119898minus1
119895=1Ω119895
Obviously we have⋃119898119894=1Ω119894= R119899 0 andΩ
119894capΩ119895= Φ 119894 = 119895
To proceed further choose the Lyapunov functionalcandidate of the following form
119881119894(119909 (119905) 119890 (119905)) = 119881
1(119905) + 119881
2(119905) + 119881
3(119905) + 119881
4(119905)
+ 1198815(119905) + 119881
6(119905)
(25)
where1198811(119909 (119905)) = 119909
119879
(119905) 119875119894119909 (119905)
1198812(119909 (119905)) = int
0
minus120591
int
119905
119905+120579
119909119879
(119904) 119877119894
119909 (119904) 119889119904 119889120579
1198813(119909 (119905)) = int
119905
119905minus119889119894(119905)
119909119879
(119904) 119876119894119909 (119904) 119889119904
1198814(119890 (119905)) = 119890
119879
(119905) 119875119890119890 (119905)
1198815(119890 (119905)) = int
0
minus120591
int
119905
119905+120579
119890119879
(119904) 119877119890119890 (119904) 119889119904 119889120579
1198816(119890 (119905)) = int
119905
119905minus119889119894(119905)
119890119879
(119904) 119876119890119890 (119904) 119889119904
(26)
where 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890are positive definite matrixes
satisfying inequalities (16)Thereafter we will show that under the switching law (8)
along any nonzero solutions of system (2a) (2b) and (2c)119894(119909(119905) 119890(119905)) lt 0 When 119909(119905) isin Ω
119894 from switching law (8)
it is known that the 119894th subsystem of system (10a) (10b) and(10c) is active Thus we have
1(119909 (119905))
= 119909119879
(119905) 119875119894119909 (119905) + 119909
119879
(119905) 119875119894
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 119861119894119897119870119894119895)119879
119875119894+ 119875119894(119860119894119897minus 119861119894119897119870119894119895)] 119909 (119905)
+ 119890119879
(119905) (119871119894119897119862119894119892)119879
119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
6 Mathematical Problems in Engineering
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119875119894+ 119875119894
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)] 119909 (119905) + 119890
119879
(119905) (119871119894119897119862119894119892)119879
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905) + 119909
119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
(27)
Thus it follows further that
2(119909 (119905))
= 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus120591
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119871119894119897119862119894119892119890 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times 119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894] 119909 (119905) + 119909
119879
(119905 minus 119889119894(119905))
times [119860119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
times 119909 (119905 minus 119889119894(119905)) + 119890
119879
(119905)
times [119862119879
119894119892119871119879
119894119897119877119894119871119894119892119862119894119895+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
times119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
(28)
Notice that from Assumption 1 the following can beobtained
3(119909 (119905))
= 119909119879
(119905) 119876119894119909 (119905) minus (1 minus 119889
119894(119905)) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) 119876119894119909 (119905)minus(1 minus 119889
119894) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
(29)
It holds that
4(119890 (119905))
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119890119890 (119905) + 119890
119879
(119905) 119875119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) [(119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)] 119890 (119905)
(30)
From 0 le 119889120590(119905) le 120591 it is clear that
5(119890 (119905))
= 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus120591
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(31)
Mathematical Problems in Engineering 7
It is easy to derive the following
6(119890 (119905))
= 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894(119905)) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
(32)
At this point of the argument we should note that theoutput of the failure actuators is zero for 119908
119894sube Θ119894 Namely
only the residual normal actuators contribute to the time-delay switched fuzzy system It holds true that
119861119894119897119870119894119895= 119861119908119894119897119870119894119895 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894le 119861119908119894119897119870119894119895 (33)
Thus when 119909(119905) isin Ω119894 we have
119894(119909 (119905) 119890 (119905)) =
1(119905) +
2(119905) +
3(119905) +
4(119905)
+ 5(119905) +
6(119905)
(34)
Substituting (27) (28) (29) (30) (31) and (32) into (34)yields
119894(119909 (119905) 119890 (119905)) le Ψ
119894minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(35)
where
Ψ119894= Ξ119879
(119905) Π119894Ξ (119905)
Π119894=
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
(36)
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(37)
From (16) and (35) we know that 119894(119909(119905) 119890(119905)) lt 0
are well defined under the switching law (8) for arbitrary119909(119905) = 0 and 119890(119905) = 0 According to (35) we can concludethat the closed-loop system of (10a) (10b) and (10c) isasymptotically stable via the state-feedback controller (14b)under the switching law (8) when the actuators are seriousfailure and the observer error 119890(119905) asymptotically convergesto zero This ends the proof
Moreover we reformulate (36) into LMI problem Con-sidering (36) andmultiplying both sides of (36) by thematrixdiag119875minus1
119894 119868 119868 119868 (36) can be reformulated as follows
Π119894=
[[[
[
1205741112057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]
]
(38)
12057411= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
+ 120591(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
119877119894(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
+ 120591 (1205761+ 1205762) (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
times (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
) + 119875minus1
119894119876119894119875minus1
119894
12057412= 119860ℎ119894119897
12057413= 119871119894119897119862119894119892
12057422= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
8 Mathematical Problems in Engineering
12057433= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12057434= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12057444= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(39)
We restate as follows
Theorem 5 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies Assumption 1 If there exist constants120573119894119903(119894 119903 isin 119872) (either all nonnegative or all non-positive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12057411+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(40)
where lowast denotes the symmetric term then the closed-loopsystem (10a) (10b) and (10c) is asymptotically stable in zero bythe reliable controllers (14b) The parameters of formulae (14a)and (14b) satisfy (18) and (19)
It should be noted that the stability conditions (40) can betransformed into the linear matrix inequalities by using Schurrsquoscomplement Consider the following
[[[[[[[[[[[[[[[[[[[
[
12059011+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 120590121205901312059014120590150 120590170 0 0 0
lowast 120590220 0 0 0 0 0 0 0 0
lowast lowast 120590330 0 0 0 0 0 0 0
lowast lowast lowast 120590440 0 0 0 0 0 0
lowast lowast lowast lowast 12059055120590560 0 0 0 0
lowast lowast lowast lowast lowast 120590660 0 0 0 0
lowast lowast lowast lowast lowast lowast 12059077120590780 0 0
lowast lowast lowast lowast lowast lowast lowast 12059088120590890 0
lowast lowast lowast lowast lowast lowast lowast lowast 12059099120590910
0
lowast lowast lowast lowast lowast lowast lowast lowast lowast 12059010101205901011
lowast lowast lowast lowast lowast lowast lowast lowast lowast lowast 1205901111
]]]]]]]]]]]]]]]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(41)
where lowast denotes the symmetric term where
12059011= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
12059012= 119875minus1
119894
12059013= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059014= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059015= 119860ℎ119894119897
12059056= 119860119879
ℎ119894119897119877119894
12059017= 119871119894119897119862119894119892
12059078= 119862119879
119894119892119871119879
119894119897
12059089= 119862119879
119894119892119871119879
119894119897119877119894
120590910= (119860119894119897minus 119871119894119897119862119894119892)119879
12059022= minus 119876
119894
minus1
12059033= minus 120591
minus1
119877119894
minus1
12059044= minus
119868
120591 (1205761+ 1205762)
12059055= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897] minus (1 minus 119889
119894) 119876119894
12059066= minus 120591
minus1
1205761119868
12059077= (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12059088= minus 120591
minus1
119877119894
minus1
12059099= minus 120591
minus1
(120576minus1
2+ 120576minus1
3)minus1
119868
1205901010= minus 120591
minus1
119877119890
minus1
1205901011= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
1205901111= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(42)
Mathematical Problems in Engineering 9
Remark 6 The Lyapunov function (34) is multi-Lyapunovcontaining positive definite matrixes 119875
119894 119877119894 119876119894 119875119890 119877119890 and119876
119890
Therewill be somedifficulty to seek positive definitematrixeswhich induce some possible conservativeness different fromthe partition definite matrix method in [38] However weadopt the following methods to overcome the main sourcesof conservativeness
(1) Notice that the stable conditions in Theorem 5 are allof LMI form due to (41) we can solve the problem ofstabilization converting to the LMIsrsquo problem and themethod of augmenting matrix norm is avoided
(2) The maximum delay bound is obtained by solvingLMIs containing variables 119875
119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890
instead of preselecting 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890 Thus
optimizing positive definite matrices in order toobtain a less conservative delay bound can be easilyrealized
4 Illustrative Numerical Example
To illustrate the effectiveness of proposed approach thefollowing switched fuzzy system with time-varying delay isconsidered
1198771
1 if 119911 is 1198721
11 then
(119905) = 11986011119909 (119905) + 119860
ℎ11119909 (119905 minus 119889
1(119905)) + 119861
111199061(119905)
119910 (119905) = 11986211119909 (119905)
1198772
1 if 119911 is 1198722
11 then
(119905) = 11986012119909 (119905) + 119860
ℎ12119909 (119905 minus 119889
1(119905)) + 119861
121199061(119905)
119910 (119905) = 11986212119909 (119905)
1198771
2 if 120575 is 1198721
21 then
(119905) = 11986021119909 (119905) + 119860
ℎ21119909 (119905 minus 119889
2(119905)) + 119861
211199062(119905)
119910 (119905) = 11986221119909 (119905)
1198772
2 if 120575 is 1198722
21 then
(119905) = 11986022119909 (119905) + 119860
ℎ22119909 (119905 minus 119889
2(119905)) + 119861
221199062(119905)
119910 (119905) = 11986222119909 (119905)
(43)
along with system matrices
11986011= [minus45 3
0 2] 119860
12= [minus18 25
0 minus11]
11986021= [15 0
1 minus45] 119860
22= [minus12 0
minus4 minus5]
119860ℎ11= 119860ℎ12= [06 05
0 02] 119860
ℎ21= 119860ℎ22= [01 06
04 03]
11986111= 11986112= [1 2
0 2] 119861
21= 11986122= [2 0
2 5]
119861Θ11
= 119861Θ12
= [1 0
0 0] 119861
Θ21
= 119861Θ22
= [0 0
0 5]
11986211= 11986212= 11986221= 11986222= [2 0]
(44)
It should be noted that (119860119894119897 119861Θ119894119897
) is not a stable pair sys-temmatrices In turn a subsystem is unstablewhen failures ofactuators occur Nonetheless the reliable control problem issolvable via switching between unstable subsystems as provedin the previous section (see Theorem 3) If the time-varyingdelays are chosen as
1198891(119905) = 0003 minus 0003 sin (119905) (45a)
1198892(119905) = 001 minus 001 sin (119905) (45b)
then it is clear that 1198891le 0003 119889
2le 001 and 120591 le 002
The membership functions respectively are chosen as
1205831198721
11
(119911 (119905)) =1
1 + 119890minus2119911(119905) 120583
1198722
11
(119911 (119905)) = 1 minus 1205831198721
11
1205831198721
21
(120575 (119905)) =1
1 + 119890(minus2(120575(119905)minus03)) 120583
1198722
21
(120575 (119905)) = 1 minus 1205831198721
21
(46)
Then the parameters of controllers are defined
12058511= 12058512= 1 120585
21= 12058522= 08 120576
1= 1205762= 1205763= 001
(47)
Define the state observers as
119909 (119905) =
2
sum
119894=1
2
sum
119897=1
2
sum
119895=1
2
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119871119894119897119862119894119892119890 (119905) ]
(48)
upon choosing
12057211= 12057212= 3 120572
21= 12057222= 4
120573119894119903= 1 (119894 119903 = 1 2)
(49)
Solving inequality (16) one can find that
1198751= [02034 minus01141
minus01141 09462] 119875
2= [05998 minus00412
minus00412 15313]
1198771= [03148 minus01214
minus01214 09789] 119877
2= [06112 minus00291
minus00291 09891]
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
which make switched fuzzy system asymptotic stabilityare designed Sufficient conditions are derived via multipleLyapunov function method The remainder of this paperis organized as follows Section 2 presents an outlinefor switched fuzzy systems model and preliminaries InSection 3 stabilization and the reliable controller arederived An illustrative example is given in Section 4 Finallysome concluding remarks are included in Section 5
2 Model Description and Preliminaries
In this section we present a time-varying delay switchedfuzzy model with faulty actuators The main novelty is thecombination of reliable control and switched fuzzy controlConsider the continuous time-varying delay switched fuzzymodel in which the delays are changed depending on timenamely every subsystem of switched systems is time-varyingdelay fuzzy system
119877119897
120590(119905) if 1205851is 119872119897120590(119905)1sdot sdot sdot and 120585
119901is 119872119897120590(119905)119901 then (1)
(119905) = 119860120590(119905)119897119909 (119905) + 119860
ℎ120590(119905)119897119909 (119905 minus 119889
120590(119905)(119905)) + 119861
120590(119905)119897119906120590(119905)(119905)
(2a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (2b)
119910 (119905) = 119862120590(119905)119897119909 (119905) 119897 = 1 2 119873
120590(119905) (2c)
In here the symbols represent the following 120590 119872 =1 2 119898 is the switching signal to be designed1205851 1205852 120585
119901are the premise variables 119872119897
120590(119905)1 119872
119897
120590(119905)119901
denote fuzzy sets in the 120590th switched subsystem 119877119897120590(119905)
denotethe 119897th fuzzy inference rule in the 120590th switched subsystem119873120590(119905)
is the number of inference rules in the 120590th switchedsubsystem and fuzzy rules are selected in every switchedsubsystem 119906
120590(119905)(119905) is the input variable of the 120590th switched
subsystem 119909(119905) = [1199091(119905) 1199092(119905) sdot sdot sdot 119909
119899(119905)]119879
isin R119899 is the statevariable vector 119860
120590(119905)119897 119860ℎ120590(119905)119897
119861120590(119905)119897
and 119862120590(119905)119897
are knownconstant matrices of appropriate dimensions of the 120590thswitched subsystem 120593(119905) is a continuously differentiablevector-valued initial function and 120591 gt 0 119889
120590(119905)(119905) denote the
time-varying delay of the 120590th switched subsystem satisfyingAssumption 1
Assumption 1 119889120590(119905)(119905) is a differentiable function satisfying
0 le 119889120590(119905)(119905) le 120591 and 119889
120590(119905)(119905) le 119889 lt 1 for some known constant
119889The 119894th switched subsystem is
119877119897
119894 if 1205851is 1198721198971198941sdot sdot sdot and 120585
119901is 119872119897119894119901 then (3)
(119905) = 119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905) (4a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (4b)
119910 (119905) = 119862119894119897119909 (119905) 119894 = 1 119898 119897 = 1 2 119873
119894 (4c)
Therefore the global model of the 119894th switched subsystem isdescribed by
(119905) =
119873119894
sum
119897=1
120578119894119897(120585 (119905)) [119860
119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)]
(5a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (5b)
119910 (119905) =
119873119894
sum
119897=1
120578119894119897(120585 (119905)) 119862
119894119897119909 (119905) 119894 = 1 119898 (5c)
along with
0 le 120578119894119897(120585 (119905)) le 1
119873119894
sum
119897=1
120578119894119897(120585 (119905)) = 1 (6)
in which
120596119894119897(120585 (119905)) =
119901
prod
120588=1
119872119897
119894120588(120585120588(119905)) 120578
119894119897(120585 (119905)) =
120596119894119897(120585 (119905))
sum119873119894
119897=1120596119894119897(120585 (119905))
(7)
where119872119897119894120588(120585120588(119905)) denotes themembership function and 120585
120588(119905)
belongs to the fuzzy set119872119897119894120588
Since the system states often are not directly measurablewe consider the switching signal 120590 = 120590(119909(119905)) which dependson observer states119909(119905) is the observers signal of119909(119905) SupposeΩ1 Ω2 Ω
119898is a partition ofR119899 that is⋃119898
119894=1Ω119894= R119899 0
andΩ119894⋂Ω119895= Φ 119894 = 119895 The design of switching signal is
120590 = 120590 (119909 (119905)) = 119894 [0 +infin) 997888rarr 119872 = 1 2 119898 (8)
which depends on Ω1 Ω2 Ω
119898 When 119909(119905) isin Ω
119894 the
switching signal subjects to
V119894(119909 (119905)) =
1 119909 (119905) isin Ω119894
0 119909 (119905) notin Ω119894119894 isin 119872 (9)
That is if and only if 120590 = 120590(119909(119905)) = 119894 then V119894(119909(119905)) = 1
From V119894(119909(119905)) the system (2a) (2b) and (2c) is repre-
sented by
(119905) =
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905))
times [119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)]
(10a)
119909 (119905) = 120593 (119905) 119905 isin [minus120591 0] (10b)
119910 (119905) =
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 119862
119894119897119909 (119905) (10c)
In order to investigate the reliable control problem weclassify actuators of 119894th switched subsystem (5a) (5b) and
4 Mathematical Problems in Engineering
(5c) into two groups [34] One is a set of actuators susceptibleto failures denoted by Θ
119894= 1 2 119896
119894 (119894 = 1 2 119898)
The other is a set of actuators robust to failures denoted byΘ119894= 1 2 119896
119894 minus Θ119894 (119894 = 1 2 119898) Therefore introduce
the decomposition of 119861119894119897as
119861119894119897= 119861Θ119894119897+ 119861Θ119894119897
119894 = 1 2 119898 119897 = 1 2 119873119894 (11)
where 119861Θ119894119897
and 119861Θ119894119897
are gained by making the columnelements of 119861
119894119897which correspond to Θ
119894119897and Θ
119894119897 respectively
zero Chose 120596119894as set of actuators susceptible to failures in
practice 120596119894sube Θ119894 then
119861119894= 119861120596119894+ 119861120596119894 119894 = 1 2 119898 (12)
where 119861120596119894and 119861
120596119894are gained bymaking the column elements
of 119861119894which correspond to 120596
119894and 120596
119894 respectively zero the
following is obvious
119861Θ119894
119861119879
Θ119894
le 119861120596119894119861119879
120596119894
119861120596119894119861119879
120596119894
le 119861Θ119894119861119879
Θ119894
119861119894119897119861119879
119894119897= 119861Θ119894119897119861119879
Θ119894119897
+ 119861Θ119894119897
119861119879
Θ119894119897
119894 = 1 2 119898
(13)
Remark 2 In the existing standard reliable control problemthe condition (119860
119894119897 119861Θ119894119897
) must be a stable pair requisite Thisstrong condition is no longer needed here for switched fuzzysystems because we can design the switching law to make theorigin system stabilizable In fact if (119860
119895119897 119861Θ119895119897
) is a stable pairfor any 119895 isin 119872 then we can design state feedback controllerfor the 119895th subsystem that makes the system (10a) (10b) and(10c) stabilizable
3 Main New Results
In particular the main attention of this paper is concentratedon actuators of switched fuzzy system suffering seriousfailures which has great significance in theoretical studyand engineering applications Moreover according to PDC(Parallel DistributedCompensation) the observers and fuzzyoutput feedback controllers are designed
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119892(120585 (119905))
times [119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)
+119871119894119897[119910 (119905) minus 119862
119894119892119909 (119905)]]
(14a)
119906119894(119905) = minus
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 119870
119894119897119909 (119905) (14b)
It ensures that the system (2a) (2b) and (2c) is globalasymptotic stability where 119909(119905) isin R119899 is state vectors offuzzy observer and 119871
119894119897represents observer gain matrix for
the 119897th fuzzy rule of the 119894th switching subsystem 119871119894119897can
be determined by solving conditions (18) 119870119894119897denote the
controllers feedback gain matrix and 119870119894119897can be determined
by solving controller design conditions (19)In this section we derive the sufficient conditions for
global asymptotic stability of the time-varying delay switchedfuzzy system (2a) (2b) and (2c) Choosing observer error119890(119905) = 119909(119905) minus 119909(119905) we can obtain
(119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905))
times [[119860119894119897minus 119861119894119897119870119894119895] 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+119861119894119897119870119894119895119890 (119905) ]
(15a)
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+119871119894119897119862119894119892119890 (119905) ]
(15b)
119890 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905) + 119860
ℎ119894119897119890 (119905 minus 119889
119894(119905))]
(15c)
Theorem 3 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies the Assumption 1 If there exist con-stants 120573
119894119903(119894 119903 isin 119872) (either all nonnegative or all nonpositive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12058711+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(16)
where lowast denotes the symmetric term where
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
Mathematical Problems in Engineering 5
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(17)
then the closed-loop system (10a) (10b) and (10c) is asymp-totically stable in zero by the reliable controllers (14b) Theparameters of formula (14a) (14b) satisfy
119871119894119897= 120585119894119897119875minus1
119890119862119879
119894119897 119894 = 1 119898 119897 = 1 2 119873
119894 (18)
119870119894119895= 120572119894119895119861119879
Θ119894119895
119875119894 119894 = 1 119898 119895 = 1 2 119873
119894 (19)
Remark 4 The controllers are reliable controller because ofthe controllers feedback gainmatrix119870
119894119897that are the functions
of the actuators failures matrix 119861Θ119894119897
Moreover differing fromtraditional switching system the switching signal (8) in thispaper is dependeny on the state of observer
Proof Without loss of generality suppose 120573119894119903ge 0 For any
119894 isin 119872 if
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (20)
From (16) we can gain
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times Ξ119879
(119905)
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
Ξ (119905) lt 0
(21)
where
Ξ (119905) =
[[[
[
119909 (119905)
119909 (119905 minus 119889119894(119905))
119890 (119905)
119890 (119905 minus 119889119894(119905))
]]]
]
(22)
Obviously for forall119909(119905) isin R119899 0 there certainly is an 119894 isin 119872such that
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (23)
For arbitrary 119894 isin 119872 let
Ω119894= 119909 (119905) isin 119877
119899
0 | 119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872
(24)
then ⋃119898119894=1Ω119894= R119899 0 Further let construct the sets
Ω1= Ω1 Ω
119894= Ω119894minus ⋃119894minus1
119895=1Ω119895 Ω
119898= Ω119898minus ⋃119898minus1
119895=1Ω119895
Obviously we have⋃119898119894=1Ω119894= R119899 0 andΩ
119894capΩ119895= Φ 119894 = 119895
To proceed further choose the Lyapunov functionalcandidate of the following form
119881119894(119909 (119905) 119890 (119905)) = 119881
1(119905) + 119881
2(119905) + 119881
3(119905) + 119881
4(119905)
+ 1198815(119905) + 119881
6(119905)
(25)
where1198811(119909 (119905)) = 119909
119879
(119905) 119875119894119909 (119905)
1198812(119909 (119905)) = int
0
minus120591
int
119905
119905+120579
119909119879
(119904) 119877119894
119909 (119904) 119889119904 119889120579
1198813(119909 (119905)) = int
119905
119905minus119889119894(119905)
119909119879
(119904) 119876119894119909 (119904) 119889119904
1198814(119890 (119905)) = 119890
119879
(119905) 119875119890119890 (119905)
1198815(119890 (119905)) = int
0
minus120591
int
119905
119905+120579
119890119879
(119904) 119877119890119890 (119904) 119889119904 119889120579
1198816(119890 (119905)) = int
119905
119905minus119889119894(119905)
119890119879
(119904) 119876119890119890 (119904) 119889119904
(26)
where 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890are positive definite matrixes
satisfying inequalities (16)Thereafter we will show that under the switching law (8)
along any nonzero solutions of system (2a) (2b) and (2c)119894(119909(119905) 119890(119905)) lt 0 When 119909(119905) isin Ω
119894 from switching law (8)
it is known that the 119894th subsystem of system (10a) (10b) and(10c) is active Thus we have
1(119909 (119905))
= 119909119879
(119905) 119875119894119909 (119905) + 119909
119879
(119905) 119875119894
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 119861119894119897119870119894119895)119879
119875119894+ 119875119894(119860119894119897minus 119861119894119897119870119894119895)] 119909 (119905)
+ 119890119879
(119905) (119871119894119897119862119894119892)119879
119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
6 Mathematical Problems in Engineering
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119875119894+ 119875119894
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)] 119909 (119905) + 119890
119879
(119905) (119871119894119897119862119894119892)119879
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905) + 119909
119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
(27)
Thus it follows further that
2(119909 (119905))
= 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus120591
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119871119894119897119862119894119892119890 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times 119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894] 119909 (119905) + 119909
119879
(119905 minus 119889119894(119905))
times [119860119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
times 119909 (119905 minus 119889119894(119905)) + 119890
119879
(119905)
times [119862119879
119894119892119871119879
119894119897119877119894119871119894119892119862119894119895+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
times119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
(28)
Notice that from Assumption 1 the following can beobtained
3(119909 (119905))
= 119909119879
(119905) 119876119894119909 (119905) minus (1 minus 119889
119894(119905)) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) 119876119894119909 (119905)minus(1 minus 119889
119894) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
(29)
It holds that
4(119890 (119905))
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119890119890 (119905) + 119890
119879
(119905) 119875119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) [(119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)] 119890 (119905)
(30)
From 0 le 119889120590(119905) le 120591 it is clear that
5(119890 (119905))
= 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus120591
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(31)
Mathematical Problems in Engineering 7
It is easy to derive the following
6(119890 (119905))
= 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894(119905)) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
(32)
At this point of the argument we should note that theoutput of the failure actuators is zero for 119908
119894sube Θ119894 Namely
only the residual normal actuators contribute to the time-delay switched fuzzy system It holds true that
119861119894119897119870119894119895= 119861119908119894119897119870119894119895 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894le 119861119908119894119897119870119894119895 (33)
Thus when 119909(119905) isin Ω119894 we have
119894(119909 (119905) 119890 (119905)) =
1(119905) +
2(119905) +
3(119905) +
4(119905)
+ 5(119905) +
6(119905)
(34)
Substituting (27) (28) (29) (30) (31) and (32) into (34)yields
119894(119909 (119905) 119890 (119905)) le Ψ
119894minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(35)
where
Ψ119894= Ξ119879
(119905) Π119894Ξ (119905)
Π119894=
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
(36)
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(37)
From (16) and (35) we know that 119894(119909(119905) 119890(119905)) lt 0
are well defined under the switching law (8) for arbitrary119909(119905) = 0 and 119890(119905) = 0 According to (35) we can concludethat the closed-loop system of (10a) (10b) and (10c) isasymptotically stable via the state-feedback controller (14b)under the switching law (8) when the actuators are seriousfailure and the observer error 119890(119905) asymptotically convergesto zero This ends the proof
Moreover we reformulate (36) into LMI problem Con-sidering (36) andmultiplying both sides of (36) by thematrixdiag119875minus1
119894 119868 119868 119868 (36) can be reformulated as follows
Π119894=
[[[
[
1205741112057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]
]
(38)
12057411= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
+ 120591(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
119877119894(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
+ 120591 (1205761+ 1205762) (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
times (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
) + 119875minus1
119894119876119894119875minus1
119894
12057412= 119860ℎ119894119897
12057413= 119871119894119897119862119894119892
12057422= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
8 Mathematical Problems in Engineering
12057433= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12057434= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12057444= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(39)
We restate as follows
Theorem 5 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies Assumption 1 If there exist constants120573119894119903(119894 119903 isin 119872) (either all nonnegative or all non-positive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12057411+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(40)
where lowast denotes the symmetric term then the closed-loopsystem (10a) (10b) and (10c) is asymptotically stable in zero bythe reliable controllers (14b) The parameters of formulae (14a)and (14b) satisfy (18) and (19)
It should be noted that the stability conditions (40) can betransformed into the linear matrix inequalities by using Schurrsquoscomplement Consider the following
[[[[[[[[[[[[[[[[[[[
[
12059011+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 120590121205901312059014120590150 120590170 0 0 0
lowast 120590220 0 0 0 0 0 0 0 0
lowast lowast 120590330 0 0 0 0 0 0 0
lowast lowast lowast 120590440 0 0 0 0 0 0
lowast lowast lowast lowast 12059055120590560 0 0 0 0
lowast lowast lowast lowast lowast 120590660 0 0 0 0
lowast lowast lowast lowast lowast lowast 12059077120590780 0 0
lowast lowast lowast lowast lowast lowast lowast 12059088120590890 0
lowast lowast lowast lowast lowast lowast lowast lowast 12059099120590910
0
lowast lowast lowast lowast lowast lowast lowast lowast lowast 12059010101205901011
lowast lowast lowast lowast lowast lowast lowast lowast lowast lowast 1205901111
]]]]]]]]]]]]]]]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(41)
where lowast denotes the symmetric term where
12059011= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
12059012= 119875minus1
119894
12059013= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059014= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059015= 119860ℎ119894119897
12059056= 119860119879
ℎ119894119897119877119894
12059017= 119871119894119897119862119894119892
12059078= 119862119879
119894119892119871119879
119894119897
12059089= 119862119879
119894119892119871119879
119894119897119877119894
120590910= (119860119894119897minus 119871119894119897119862119894119892)119879
12059022= minus 119876
119894
minus1
12059033= minus 120591
minus1
119877119894
minus1
12059044= minus
119868
120591 (1205761+ 1205762)
12059055= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897] minus (1 minus 119889
119894) 119876119894
12059066= minus 120591
minus1
1205761119868
12059077= (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12059088= minus 120591
minus1
119877119894
minus1
12059099= minus 120591
minus1
(120576minus1
2+ 120576minus1
3)minus1
119868
1205901010= minus 120591
minus1
119877119890
minus1
1205901011= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
1205901111= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(42)
Mathematical Problems in Engineering 9
Remark 6 The Lyapunov function (34) is multi-Lyapunovcontaining positive definite matrixes 119875
119894 119877119894 119876119894 119875119890 119877119890 and119876
119890
Therewill be somedifficulty to seek positive definitematrixeswhich induce some possible conservativeness different fromthe partition definite matrix method in [38] However weadopt the following methods to overcome the main sourcesof conservativeness
(1) Notice that the stable conditions in Theorem 5 are allof LMI form due to (41) we can solve the problem ofstabilization converting to the LMIsrsquo problem and themethod of augmenting matrix norm is avoided
(2) The maximum delay bound is obtained by solvingLMIs containing variables 119875
119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890
instead of preselecting 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890 Thus
optimizing positive definite matrices in order toobtain a less conservative delay bound can be easilyrealized
4 Illustrative Numerical Example
To illustrate the effectiveness of proposed approach thefollowing switched fuzzy system with time-varying delay isconsidered
1198771
1 if 119911 is 1198721
11 then
(119905) = 11986011119909 (119905) + 119860
ℎ11119909 (119905 minus 119889
1(119905)) + 119861
111199061(119905)
119910 (119905) = 11986211119909 (119905)
1198772
1 if 119911 is 1198722
11 then
(119905) = 11986012119909 (119905) + 119860
ℎ12119909 (119905 minus 119889
1(119905)) + 119861
121199061(119905)
119910 (119905) = 11986212119909 (119905)
1198771
2 if 120575 is 1198721
21 then
(119905) = 11986021119909 (119905) + 119860
ℎ21119909 (119905 minus 119889
2(119905)) + 119861
211199062(119905)
119910 (119905) = 11986221119909 (119905)
1198772
2 if 120575 is 1198722
21 then
(119905) = 11986022119909 (119905) + 119860
ℎ22119909 (119905 minus 119889
2(119905)) + 119861
221199062(119905)
119910 (119905) = 11986222119909 (119905)
(43)
along with system matrices
11986011= [minus45 3
0 2] 119860
12= [minus18 25
0 minus11]
11986021= [15 0
1 minus45] 119860
22= [minus12 0
minus4 minus5]
119860ℎ11= 119860ℎ12= [06 05
0 02] 119860
ℎ21= 119860ℎ22= [01 06
04 03]
11986111= 11986112= [1 2
0 2] 119861
21= 11986122= [2 0
2 5]
119861Θ11
= 119861Θ12
= [1 0
0 0] 119861
Θ21
= 119861Θ22
= [0 0
0 5]
11986211= 11986212= 11986221= 11986222= [2 0]
(44)
It should be noted that (119860119894119897 119861Θ119894119897
) is not a stable pair sys-temmatrices In turn a subsystem is unstablewhen failures ofactuators occur Nonetheless the reliable control problem issolvable via switching between unstable subsystems as provedin the previous section (see Theorem 3) If the time-varyingdelays are chosen as
1198891(119905) = 0003 minus 0003 sin (119905) (45a)
1198892(119905) = 001 minus 001 sin (119905) (45b)
then it is clear that 1198891le 0003 119889
2le 001 and 120591 le 002
The membership functions respectively are chosen as
1205831198721
11
(119911 (119905)) =1
1 + 119890minus2119911(119905) 120583
1198722
11
(119911 (119905)) = 1 minus 1205831198721
11
1205831198721
21
(120575 (119905)) =1
1 + 119890(minus2(120575(119905)minus03)) 120583
1198722
21
(120575 (119905)) = 1 minus 1205831198721
21
(46)
Then the parameters of controllers are defined
12058511= 12058512= 1 120585
21= 12058522= 08 120576
1= 1205762= 1205763= 001
(47)
Define the state observers as
119909 (119905) =
2
sum
119894=1
2
sum
119897=1
2
sum
119895=1
2
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119871119894119897119862119894119892119890 (119905) ]
(48)
upon choosing
12057211= 12057212= 3 120572
21= 12057222= 4
120573119894119903= 1 (119894 119903 = 1 2)
(49)
Solving inequality (16) one can find that
1198751= [02034 minus01141
minus01141 09462] 119875
2= [05998 minus00412
minus00412 15313]
1198771= [03148 minus01214
minus01214 09789] 119877
2= [06112 minus00291
minus00291 09891]
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
(5c) into two groups [34] One is a set of actuators susceptibleto failures denoted by Θ
119894= 1 2 119896
119894 (119894 = 1 2 119898)
The other is a set of actuators robust to failures denoted byΘ119894= 1 2 119896
119894 minus Θ119894 (119894 = 1 2 119898) Therefore introduce
the decomposition of 119861119894119897as
119861119894119897= 119861Θ119894119897+ 119861Θ119894119897
119894 = 1 2 119898 119897 = 1 2 119873119894 (11)
where 119861Θ119894119897
and 119861Θ119894119897
are gained by making the columnelements of 119861
119894119897which correspond to Θ
119894119897and Θ
119894119897 respectively
zero Chose 120596119894as set of actuators susceptible to failures in
practice 120596119894sube Θ119894 then
119861119894= 119861120596119894+ 119861120596119894 119894 = 1 2 119898 (12)
where 119861120596119894and 119861
120596119894are gained bymaking the column elements
of 119861119894which correspond to 120596
119894and 120596
119894 respectively zero the
following is obvious
119861Θ119894
119861119879
Θ119894
le 119861120596119894119861119879
120596119894
119861120596119894119861119879
120596119894
le 119861Θ119894119861119879
Θ119894
119861119894119897119861119879
119894119897= 119861Θ119894119897119861119879
Θ119894119897
+ 119861Θ119894119897
119861119879
Θ119894119897
119894 = 1 2 119898
(13)
Remark 2 In the existing standard reliable control problemthe condition (119860
119894119897 119861Θ119894119897
) must be a stable pair requisite Thisstrong condition is no longer needed here for switched fuzzysystems because we can design the switching law to make theorigin system stabilizable In fact if (119860
119895119897 119861Θ119895119897
) is a stable pairfor any 119895 isin 119872 then we can design state feedback controllerfor the 119895th subsystem that makes the system (10a) (10b) and(10c) stabilizable
3 Main New Results
In particular the main attention of this paper is concentratedon actuators of switched fuzzy system suffering seriousfailures which has great significance in theoretical studyand engineering applications Moreover according to PDC(Parallel DistributedCompensation) the observers and fuzzyoutput feedback controllers are designed
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119892(120585 (119905))
times [119860119894119897119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905)) + 119861
119894119897119906119894(119905)
+119871119894119897[119910 (119905) minus 119862
119894119892119909 (119905)]]
(14a)
119906119894(119905) = minus
119898
sum
119894=1
119873119894
sum
119897=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 119870
119894119897119909 (119905) (14b)
It ensures that the system (2a) (2b) and (2c) is globalasymptotic stability where 119909(119905) isin R119899 is state vectors offuzzy observer and 119871
119894119897represents observer gain matrix for
the 119897th fuzzy rule of the 119894th switching subsystem 119871119894119897can
be determined by solving conditions (18) 119870119894119897denote the
controllers feedback gain matrix and 119870119894119897can be determined
by solving controller design conditions (19)In this section we derive the sufficient conditions for
global asymptotic stability of the time-varying delay switchedfuzzy system (2a) (2b) and (2c) Choosing observer error119890(119905) = 119909(119905) minus 119909(119905) we can obtain
(119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905))
times [[119860119894119897minus 119861119894119897119870119894119895] 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+119861119894119897119870119894119895119890 (119905) ]
(15a)
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+119871119894119897119862119894119892119890 (119905) ]
(15b)
119890 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905) + 119860
ℎ119894119897119890 (119905 minus 119889
119894(119905))]
(15c)
Theorem 3 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies the Assumption 1 If there exist con-stants 120573
119894119903(119894 119903 isin 119872) (either all nonnegative or all nonpositive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12058711+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(16)
where lowast denotes the symmetric term where
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
Mathematical Problems in Engineering 5
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(17)
then the closed-loop system (10a) (10b) and (10c) is asymp-totically stable in zero by the reliable controllers (14b) Theparameters of formula (14a) (14b) satisfy
119871119894119897= 120585119894119897119875minus1
119890119862119879
119894119897 119894 = 1 119898 119897 = 1 2 119873
119894 (18)
119870119894119895= 120572119894119895119861119879
Θ119894119895
119875119894 119894 = 1 119898 119895 = 1 2 119873
119894 (19)
Remark 4 The controllers are reliable controller because ofthe controllers feedback gainmatrix119870
119894119897that are the functions
of the actuators failures matrix 119861Θ119894119897
Moreover differing fromtraditional switching system the switching signal (8) in thispaper is dependeny on the state of observer
Proof Without loss of generality suppose 120573119894119903ge 0 For any
119894 isin 119872 if
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (20)
From (16) we can gain
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times Ξ119879
(119905)
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
Ξ (119905) lt 0
(21)
where
Ξ (119905) =
[[[
[
119909 (119905)
119909 (119905 minus 119889119894(119905))
119890 (119905)
119890 (119905 minus 119889119894(119905))
]]]
]
(22)
Obviously for forall119909(119905) isin R119899 0 there certainly is an 119894 isin 119872such that
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (23)
For arbitrary 119894 isin 119872 let
Ω119894= 119909 (119905) isin 119877
119899
0 | 119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872
(24)
then ⋃119898119894=1Ω119894= R119899 0 Further let construct the sets
Ω1= Ω1 Ω
119894= Ω119894minus ⋃119894minus1
119895=1Ω119895 Ω
119898= Ω119898minus ⋃119898minus1
119895=1Ω119895
Obviously we have⋃119898119894=1Ω119894= R119899 0 andΩ
119894capΩ119895= Φ 119894 = 119895
To proceed further choose the Lyapunov functionalcandidate of the following form
119881119894(119909 (119905) 119890 (119905)) = 119881
1(119905) + 119881
2(119905) + 119881
3(119905) + 119881
4(119905)
+ 1198815(119905) + 119881
6(119905)
(25)
where1198811(119909 (119905)) = 119909
119879
(119905) 119875119894119909 (119905)
1198812(119909 (119905)) = int
0
minus120591
int
119905
119905+120579
119909119879
(119904) 119877119894
119909 (119904) 119889119904 119889120579
1198813(119909 (119905)) = int
119905
119905minus119889119894(119905)
119909119879
(119904) 119876119894119909 (119904) 119889119904
1198814(119890 (119905)) = 119890
119879
(119905) 119875119890119890 (119905)
1198815(119890 (119905)) = int
0
minus120591
int
119905
119905+120579
119890119879
(119904) 119877119890119890 (119904) 119889119904 119889120579
1198816(119890 (119905)) = int
119905
119905minus119889119894(119905)
119890119879
(119904) 119876119890119890 (119904) 119889119904
(26)
where 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890are positive definite matrixes
satisfying inequalities (16)Thereafter we will show that under the switching law (8)
along any nonzero solutions of system (2a) (2b) and (2c)119894(119909(119905) 119890(119905)) lt 0 When 119909(119905) isin Ω
119894 from switching law (8)
it is known that the 119894th subsystem of system (10a) (10b) and(10c) is active Thus we have
1(119909 (119905))
= 119909119879
(119905) 119875119894119909 (119905) + 119909
119879
(119905) 119875119894
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 119861119894119897119870119894119895)119879
119875119894+ 119875119894(119860119894119897minus 119861119894119897119870119894119895)] 119909 (119905)
+ 119890119879
(119905) (119871119894119897119862119894119892)119879
119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
6 Mathematical Problems in Engineering
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119875119894+ 119875119894
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)] 119909 (119905) + 119890
119879
(119905) (119871119894119897119862119894119892)119879
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905) + 119909
119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
(27)
Thus it follows further that
2(119909 (119905))
= 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus120591
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119871119894119897119862119894119892119890 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times 119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894] 119909 (119905) + 119909
119879
(119905 minus 119889119894(119905))
times [119860119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
times 119909 (119905 minus 119889119894(119905)) + 119890
119879
(119905)
times [119862119879
119894119892119871119879
119894119897119877119894119871119894119892119862119894119895+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
times119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
(28)
Notice that from Assumption 1 the following can beobtained
3(119909 (119905))
= 119909119879
(119905) 119876119894119909 (119905) minus (1 minus 119889
119894(119905)) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) 119876119894119909 (119905)minus(1 minus 119889
119894) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
(29)
It holds that
4(119890 (119905))
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119890119890 (119905) + 119890
119879
(119905) 119875119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) [(119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)] 119890 (119905)
(30)
From 0 le 119889120590(119905) le 120591 it is clear that
5(119890 (119905))
= 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus120591
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(31)
Mathematical Problems in Engineering 7
It is easy to derive the following
6(119890 (119905))
= 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894(119905)) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
(32)
At this point of the argument we should note that theoutput of the failure actuators is zero for 119908
119894sube Θ119894 Namely
only the residual normal actuators contribute to the time-delay switched fuzzy system It holds true that
119861119894119897119870119894119895= 119861119908119894119897119870119894119895 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894le 119861119908119894119897119870119894119895 (33)
Thus when 119909(119905) isin Ω119894 we have
119894(119909 (119905) 119890 (119905)) =
1(119905) +
2(119905) +
3(119905) +
4(119905)
+ 5(119905) +
6(119905)
(34)
Substituting (27) (28) (29) (30) (31) and (32) into (34)yields
119894(119909 (119905) 119890 (119905)) le Ψ
119894minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(35)
where
Ψ119894= Ξ119879
(119905) Π119894Ξ (119905)
Π119894=
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
(36)
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(37)
From (16) and (35) we know that 119894(119909(119905) 119890(119905)) lt 0
are well defined under the switching law (8) for arbitrary119909(119905) = 0 and 119890(119905) = 0 According to (35) we can concludethat the closed-loop system of (10a) (10b) and (10c) isasymptotically stable via the state-feedback controller (14b)under the switching law (8) when the actuators are seriousfailure and the observer error 119890(119905) asymptotically convergesto zero This ends the proof
Moreover we reformulate (36) into LMI problem Con-sidering (36) andmultiplying both sides of (36) by thematrixdiag119875minus1
119894 119868 119868 119868 (36) can be reformulated as follows
Π119894=
[[[
[
1205741112057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]
]
(38)
12057411= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
+ 120591(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
119877119894(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
+ 120591 (1205761+ 1205762) (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
times (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
) + 119875minus1
119894119876119894119875minus1
119894
12057412= 119860ℎ119894119897
12057413= 119871119894119897119862119894119892
12057422= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
8 Mathematical Problems in Engineering
12057433= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12057434= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12057444= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(39)
We restate as follows
Theorem 5 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies Assumption 1 If there exist constants120573119894119903(119894 119903 isin 119872) (either all nonnegative or all non-positive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12057411+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(40)
where lowast denotes the symmetric term then the closed-loopsystem (10a) (10b) and (10c) is asymptotically stable in zero bythe reliable controllers (14b) The parameters of formulae (14a)and (14b) satisfy (18) and (19)
It should be noted that the stability conditions (40) can betransformed into the linear matrix inequalities by using Schurrsquoscomplement Consider the following
[[[[[[[[[[[[[[[[[[[
[
12059011+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 120590121205901312059014120590150 120590170 0 0 0
lowast 120590220 0 0 0 0 0 0 0 0
lowast lowast 120590330 0 0 0 0 0 0 0
lowast lowast lowast 120590440 0 0 0 0 0 0
lowast lowast lowast lowast 12059055120590560 0 0 0 0
lowast lowast lowast lowast lowast 120590660 0 0 0 0
lowast lowast lowast lowast lowast lowast 12059077120590780 0 0
lowast lowast lowast lowast lowast lowast lowast 12059088120590890 0
lowast lowast lowast lowast lowast lowast lowast lowast 12059099120590910
0
lowast lowast lowast lowast lowast lowast lowast lowast lowast 12059010101205901011
lowast lowast lowast lowast lowast lowast lowast lowast lowast lowast 1205901111
]]]]]]]]]]]]]]]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(41)
where lowast denotes the symmetric term where
12059011= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
12059012= 119875minus1
119894
12059013= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059014= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059015= 119860ℎ119894119897
12059056= 119860119879
ℎ119894119897119877119894
12059017= 119871119894119897119862119894119892
12059078= 119862119879
119894119892119871119879
119894119897
12059089= 119862119879
119894119892119871119879
119894119897119877119894
120590910= (119860119894119897minus 119871119894119897119862119894119892)119879
12059022= minus 119876
119894
minus1
12059033= minus 120591
minus1
119877119894
minus1
12059044= minus
119868
120591 (1205761+ 1205762)
12059055= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897] minus (1 minus 119889
119894) 119876119894
12059066= minus 120591
minus1
1205761119868
12059077= (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12059088= minus 120591
minus1
119877119894
minus1
12059099= minus 120591
minus1
(120576minus1
2+ 120576minus1
3)minus1
119868
1205901010= minus 120591
minus1
119877119890
minus1
1205901011= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
1205901111= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(42)
Mathematical Problems in Engineering 9
Remark 6 The Lyapunov function (34) is multi-Lyapunovcontaining positive definite matrixes 119875
119894 119877119894 119876119894 119875119890 119877119890 and119876
119890
Therewill be somedifficulty to seek positive definitematrixeswhich induce some possible conservativeness different fromthe partition definite matrix method in [38] However weadopt the following methods to overcome the main sourcesof conservativeness
(1) Notice that the stable conditions in Theorem 5 are allof LMI form due to (41) we can solve the problem ofstabilization converting to the LMIsrsquo problem and themethod of augmenting matrix norm is avoided
(2) The maximum delay bound is obtained by solvingLMIs containing variables 119875
119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890
instead of preselecting 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890 Thus
optimizing positive definite matrices in order toobtain a less conservative delay bound can be easilyrealized
4 Illustrative Numerical Example
To illustrate the effectiveness of proposed approach thefollowing switched fuzzy system with time-varying delay isconsidered
1198771
1 if 119911 is 1198721
11 then
(119905) = 11986011119909 (119905) + 119860
ℎ11119909 (119905 minus 119889
1(119905)) + 119861
111199061(119905)
119910 (119905) = 11986211119909 (119905)
1198772
1 if 119911 is 1198722
11 then
(119905) = 11986012119909 (119905) + 119860
ℎ12119909 (119905 minus 119889
1(119905)) + 119861
121199061(119905)
119910 (119905) = 11986212119909 (119905)
1198771
2 if 120575 is 1198721
21 then
(119905) = 11986021119909 (119905) + 119860
ℎ21119909 (119905 minus 119889
2(119905)) + 119861
211199062(119905)
119910 (119905) = 11986221119909 (119905)
1198772
2 if 120575 is 1198722
21 then
(119905) = 11986022119909 (119905) + 119860
ℎ22119909 (119905 minus 119889
2(119905)) + 119861
221199062(119905)
119910 (119905) = 11986222119909 (119905)
(43)
along with system matrices
11986011= [minus45 3
0 2] 119860
12= [minus18 25
0 minus11]
11986021= [15 0
1 minus45] 119860
22= [minus12 0
minus4 minus5]
119860ℎ11= 119860ℎ12= [06 05
0 02] 119860
ℎ21= 119860ℎ22= [01 06
04 03]
11986111= 11986112= [1 2
0 2] 119861
21= 11986122= [2 0
2 5]
119861Θ11
= 119861Θ12
= [1 0
0 0] 119861
Θ21
= 119861Θ22
= [0 0
0 5]
11986211= 11986212= 11986221= 11986222= [2 0]
(44)
It should be noted that (119860119894119897 119861Θ119894119897
) is not a stable pair sys-temmatrices In turn a subsystem is unstablewhen failures ofactuators occur Nonetheless the reliable control problem issolvable via switching between unstable subsystems as provedin the previous section (see Theorem 3) If the time-varyingdelays are chosen as
1198891(119905) = 0003 minus 0003 sin (119905) (45a)
1198892(119905) = 001 minus 001 sin (119905) (45b)
then it is clear that 1198891le 0003 119889
2le 001 and 120591 le 002
The membership functions respectively are chosen as
1205831198721
11
(119911 (119905)) =1
1 + 119890minus2119911(119905) 120583
1198722
11
(119911 (119905)) = 1 minus 1205831198721
11
1205831198721
21
(120575 (119905)) =1
1 + 119890(minus2(120575(119905)minus03)) 120583
1198722
21
(120575 (119905)) = 1 minus 1205831198721
21
(46)
Then the parameters of controllers are defined
12058511= 12058512= 1 120585
21= 12058522= 08 120576
1= 1205762= 1205763= 001
(47)
Define the state observers as
119909 (119905) =
2
sum
119894=1
2
sum
119897=1
2
sum
119895=1
2
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119871119894119897119862119894119892119890 (119905) ]
(48)
upon choosing
12057211= 12057212= 3 120572
21= 12057222= 4
120573119894119903= 1 (119894 119903 = 1 2)
(49)
Solving inequality (16) one can find that
1198751= [02034 minus01141
minus01141 09462] 119875
2= [05998 minus00412
minus00412 15313]
1198771= [03148 minus01214
minus01214 09789] 119877
2= [06112 minus00291
minus00291 09891]
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(17)
then the closed-loop system (10a) (10b) and (10c) is asymp-totically stable in zero by the reliable controllers (14b) Theparameters of formula (14a) (14b) satisfy
119871119894119897= 120585119894119897119875minus1
119890119862119879
119894119897 119894 = 1 119898 119897 = 1 2 119873
119894 (18)
119870119894119895= 120572119894119895119861119879
Θ119894119895
119875119894 119894 = 1 119898 119895 = 1 2 119873
119894 (19)
Remark 4 The controllers are reliable controller because ofthe controllers feedback gainmatrix119870
119894119897that are the functions
of the actuators failures matrix 119861Θ119894119897
Moreover differing fromtraditional switching system the switching signal (8) in thispaper is dependeny on the state of observer
Proof Without loss of generality suppose 120573119894119903ge 0 For any
119894 isin 119872 if
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (20)
From (16) we can gain
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times Ξ119879
(119905)
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
Ξ (119905) lt 0
(21)
where
Ξ (119905) =
[[[
[
119909 (119905)
119909 (119905 minus 119889119894(119905))
119890 (119905)
119890 (119905 minus 119889119894(119905))
]]]
]
(22)
Obviously for forall119909(119905) isin R119899 0 there certainly is an 119894 isin 119872such that
119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872 (23)
For arbitrary 119894 isin 119872 let
Ω119894= 119909 (119905) isin 119877
119899
0 | 119909119879
(119905) (119875119894minus 119875119903) 119909 (119905) ge 0 forall119903 isin 119872
(24)
then ⋃119898119894=1Ω119894= R119899 0 Further let construct the sets
Ω1= Ω1 Ω
119894= Ω119894minus ⋃119894minus1
119895=1Ω119895 Ω
119898= Ω119898minus ⋃119898minus1
119895=1Ω119895
Obviously we have⋃119898119894=1Ω119894= R119899 0 andΩ
119894capΩ119895= Φ 119894 = 119895
To proceed further choose the Lyapunov functionalcandidate of the following form
119881119894(119909 (119905) 119890 (119905)) = 119881
1(119905) + 119881
2(119905) + 119881
3(119905) + 119881
4(119905)
+ 1198815(119905) + 119881
6(119905)
(25)
where1198811(119909 (119905)) = 119909
119879
(119905) 119875119894119909 (119905)
1198812(119909 (119905)) = int
0
minus120591
int
119905
119905+120579
119909119879
(119904) 119877119894
119909 (119904) 119889119904 119889120579
1198813(119909 (119905)) = int
119905
119905minus119889119894(119905)
119909119879
(119904) 119876119894119909 (119904) 119889119904
1198814(119890 (119905)) = 119890
119879
(119905) 119875119890119890 (119905)
1198815(119890 (119905)) = int
0
minus120591
int
119905
119905+120579
119890119879
(119904) 119877119890119890 (119904) 119889119904 119889120579
1198816(119890 (119905)) = int
119905
119905minus119889119894(119905)
119890119879
(119904) 119876119890119890 (119904) 119889119904
(26)
where 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890are positive definite matrixes
satisfying inequalities (16)Thereafter we will show that under the switching law (8)
along any nonzero solutions of system (2a) (2b) and (2c)119894(119909(119905) 119890(119905)) lt 0 When 119909(119905) isin Ω
119894 from switching law (8)
it is known that the 119894th subsystem of system (10a) (10b) and(10c) is active Thus we have
1(119909 (119905))
= 119909119879
(119905) 119875119894119909 (119905) + 119909
119879
(119905) 119875119894
119909 (119905)
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 119861119894119897119870119894119895)119879
119875119894+ 119875119894(119860119894119897minus 119861119894119897119870119894119895)] 119909 (119905)
+ 119890119879
(119905) (119871119894119897119862119894119892)119879
119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
6 Mathematical Problems in Engineering
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119875119894+ 119875119894
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)] 119909 (119905) + 119890
119879
(119905) (119871119894119897119862119894119892)119879
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905) + 119909
119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
(27)
Thus it follows further that
2(119909 (119905))
= 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus120591
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119871119894119897119862119894119892119890 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times 119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894] 119909 (119905) + 119909
119879
(119905 minus 119889119894(119905))
times [119860119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
times 119909 (119905 minus 119889119894(119905)) + 119890
119879
(119905)
times [119862119879
119894119892119871119879
119894119897119877119894119871119894119892119862119894119895+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
times119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
(28)
Notice that from Assumption 1 the following can beobtained
3(119909 (119905))
= 119909119879
(119905) 119876119894119909 (119905) minus (1 minus 119889
119894(119905)) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) 119876119894119909 (119905)minus(1 minus 119889
119894) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
(29)
It holds that
4(119890 (119905))
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119890119890 (119905) + 119890
119879
(119905) 119875119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) [(119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)] 119890 (119905)
(30)
From 0 le 119889120590(119905) le 120591 it is clear that
5(119890 (119905))
= 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus120591
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(31)
Mathematical Problems in Engineering 7
It is easy to derive the following
6(119890 (119905))
= 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894(119905)) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
(32)
At this point of the argument we should note that theoutput of the failure actuators is zero for 119908
119894sube Θ119894 Namely
only the residual normal actuators contribute to the time-delay switched fuzzy system It holds true that
119861119894119897119870119894119895= 119861119908119894119897119870119894119895 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894le 119861119908119894119897119870119894119895 (33)
Thus when 119909(119905) isin Ω119894 we have
119894(119909 (119905) 119890 (119905)) =
1(119905) +
2(119905) +
3(119905) +
4(119905)
+ 5(119905) +
6(119905)
(34)
Substituting (27) (28) (29) (30) (31) and (32) into (34)yields
119894(119909 (119905) 119890 (119905)) le Ψ
119894minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(35)
where
Ψ119894= Ξ119879
(119905) Π119894Ξ (119905)
Π119894=
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
(36)
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(37)
From (16) and (35) we know that 119894(119909(119905) 119890(119905)) lt 0
are well defined under the switching law (8) for arbitrary119909(119905) = 0 and 119890(119905) = 0 According to (35) we can concludethat the closed-loop system of (10a) (10b) and (10c) isasymptotically stable via the state-feedback controller (14b)under the switching law (8) when the actuators are seriousfailure and the observer error 119890(119905) asymptotically convergesto zero This ends the proof
Moreover we reformulate (36) into LMI problem Con-sidering (36) andmultiplying both sides of (36) by thematrixdiag119875minus1
119894 119868 119868 119868 (36) can be reformulated as follows
Π119894=
[[[
[
1205741112057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]
]
(38)
12057411= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
+ 120591(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
119877119894(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
+ 120591 (1205761+ 1205762) (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
times (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
) + 119875minus1
119894119876119894119875minus1
119894
12057412= 119860ℎ119894119897
12057413= 119871119894119897119862119894119892
12057422= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
8 Mathematical Problems in Engineering
12057433= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12057434= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12057444= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(39)
We restate as follows
Theorem 5 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies Assumption 1 If there exist constants120573119894119903(119894 119903 isin 119872) (either all nonnegative or all non-positive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12057411+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(40)
where lowast denotes the symmetric term then the closed-loopsystem (10a) (10b) and (10c) is asymptotically stable in zero bythe reliable controllers (14b) The parameters of formulae (14a)and (14b) satisfy (18) and (19)
It should be noted that the stability conditions (40) can betransformed into the linear matrix inequalities by using Schurrsquoscomplement Consider the following
[[[[[[[[[[[[[[[[[[[
[
12059011+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 120590121205901312059014120590150 120590170 0 0 0
lowast 120590220 0 0 0 0 0 0 0 0
lowast lowast 120590330 0 0 0 0 0 0 0
lowast lowast lowast 120590440 0 0 0 0 0 0
lowast lowast lowast lowast 12059055120590560 0 0 0 0
lowast lowast lowast lowast lowast 120590660 0 0 0 0
lowast lowast lowast lowast lowast lowast 12059077120590780 0 0
lowast lowast lowast lowast lowast lowast lowast 12059088120590890 0
lowast lowast lowast lowast lowast lowast lowast lowast 12059099120590910
0
lowast lowast lowast lowast lowast lowast lowast lowast lowast 12059010101205901011
lowast lowast lowast lowast lowast lowast lowast lowast lowast lowast 1205901111
]]]]]]]]]]]]]]]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(41)
where lowast denotes the symmetric term where
12059011= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
12059012= 119875minus1
119894
12059013= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059014= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059015= 119860ℎ119894119897
12059056= 119860119879
ℎ119894119897119877119894
12059017= 119871119894119897119862119894119892
12059078= 119862119879
119894119892119871119879
119894119897
12059089= 119862119879
119894119892119871119879
119894119897119877119894
120590910= (119860119894119897minus 119871119894119897119862119894119892)119879
12059022= minus 119876
119894
minus1
12059033= minus 120591
minus1
119877119894
minus1
12059044= minus
119868
120591 (1205761+ 1205762)
12059055= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897] minus (1 minus 119889
119894) 119876119894
12059066= minus 120591
minus1
1205761119868
12059077= (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12059088= minus 120591
minus1
119877119894
minus1
12059099= minus 120591
minus1
(120576minus1
2+ 120576minus1
3)minus1
119868
1205901010= minus 120591
minus1
119877119890
minus1
1205901011= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
1205901111= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(42)
Mathematical Problems in Engineering 9
Remark 6 The Lyapunov function (34) is multi-Lyapunovcontaining positive definite matrixes 119875
119894 119877119894 119876119894 119875119890 119877119890 and119876
119890
Therewill be somedifficulty to seek positive definitematrixeswhich induce some possible conservativeness different fromthe partition definite matrix method in [38] However weadopt the following methods to overcome the main sourcesof conservativeness
(1) Notice that the stable conditions in Theorem 5 are allof LMI form due to (41) we can solve the problem ofstabilization converting to the LMIsrsquo problem and themethod of augmenting matrix norm is avoided
(2) The maximum delay bound is obtained by solvingLMIs containing variables 119875
119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890
instead of preselecting 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890 Thus
optimizing positive definite matrices in order toobtain a less conservative delay bound can be easilyrealized
4 Illustrative Numerical Example
To illustrate the effectiveness of proposed approach thefollowing switched fuzzy system with time-varying delay isconsidered
1198771
1 if 119911 is 1198721
11 then
(119905) = 11986011119909 (119905) + 119860
ℎ11119909 (119905 minus 119889
1(119905)) + 119861
111199061(119905)
119910 (119905) = 11986211119909 (119905)
1198772
1 if 119911 is 1198722
11 then
(119905) = 11986012119909 (119905) + 119860
ℎ12119909 (119905 minus 119889
1(119905)) + 119861
121199061(119905)
119910 (119905) = 11986212119909 (119905)
1198771
2 if 120575 is 1198721
21 then
(119905) = 11986021119909 (119905) + 119860
ℎ21119909 (119905 minus 119889
2(119905)) + 119861
211199062(119905)
119910 (119905) = 11986221119909 (119905)
1198772
2 if 120575 is 1198722
21 then
(119905) = 11986022119909 (119905) + 119860
ℎ22119909 (119905 minus 119889
2(119905)) + 119861
221199062(119905)
119910 (119905) = 11986222119909 (119905)
(43)
along with system matrices
11986011= [minus45 3
0 2] 119860
12= [minus18 25
0 minus11]
11986021= [15 0
1 minus45] 119860
22= [minus12 0
minus4 minus5]
119860ℎ11= 119860ℎ12= [06 05
0 02] 119860
ℎ21= 119860ℎ22= [01 06
04 03]
11986111= 11986112= [1 2
0 2] 119861
21= 11986122= [2 0
2 5]
119861Θ11
= 119861Θ12
= [1 0
0 0] 119861
Θ21
= 119861Θ22
= [0 0
0 5]
11986211= 11986212= 11986221= 11986222= [2 0]
(44)
It should be noted that (119860119894119897 119861Θ119894119897
) is not a stable pair sys-temmatrices In turn a subsystem is unstablewhen failures ofactuators occur Nonetheless the reliable control problem issolvable via switching between unstable subsystems as provedin the previous section (see Theorem 3) If the time-varyingdelays are chosen as
1198891(119905) = 0003 minus 0003 sin (119905) (45a)
1198892(119905) = 001 minus 001 sin (119905) (45b)
then it is clear that 1198891le 0003 119889
2le 001 and 120591 le 002
The membership functions respectively are chosen as
1205831198721
11
(119911 (119905)) =1
1 + 119890minus2119911(119905) 120583
1198722
11
(119911 (119905)) = 1 minus 1205831198721
11
1205831198721
21
(120575 (119905)) =1
1 + 119890(minus2(120575(119905)minus03)) 120583
1198722
21
(120575 (119905)) = 1 minus 1205831198721
21
(46)
Then the parameters of controllers are defined
12058511= 12058512= 1 120585
21= 12058522= 08 120576
1= 1205762= 1205763= 001
(47)
Define the state observers as
119909 (119905) =
2
sum
119894=1
2
sum
119897=1
2
sum
119895=1
2
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119871119894119897119862119894119892119890 (119905) ]
(48)
upon choosing
12057211= 12057212= 3 120572
21= 12057222= 4
120573119894119903= 1 (119894 119903 = 1 2)
(49)
Solving inequality (16) one can find that
1198751= [02034 minus01141
minus01141 09462] 119875
2= [05998 minus00412
minus00412 15313]
1198771= [03148 minus01214
minus01214 09789] 119877
2= [06112 minus00291
minus00291 09891]
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119875119894+ 119875119894
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)] 119909 (119905) + 119890
119879
(119905) (119871119894119897119862119894119892)119879
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119871119894119897119862119894119892119890 (119905) + 119909
119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897
times 119875119894119909 (119905) + 119909
119879
(119905) 119875119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
(27)
Thus it follows further that
2(119909 (119905))
= 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus120591
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591 119909119879
(119905) 119877119894
119909 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119909119879
(119905) (119860119894119897minus 119861119894119897119870119894119895)119879
119877119894119871119894119897119862119894119892119890 (119905)
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119909119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119894119871119894119897119862119894119892119890 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905)
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119860ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) 119862119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) [(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times 119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894] 119909 (119905) + 119909
119879
(119905 minus 119889119894(119905))
times [119860119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
times 119909 (119905 minus 119889119894(119905)) + 119890
119879
(119905)
times [119862119879
119894119892119871119879
119894119897119877119894119871119894119892119862119894119895+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
times119890 (119905) minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
(28)
Notice that from Assumption 1 the following can beobtained
3(119909 (119905))
= 119909119879
(119905) 119876119894119909 (119905) minus (1 minus 119889
119894(119905)) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119909119879
(119905) 119876119894119909 (119905)minus(1 minus 119889
119894) 119909119879
(119905 minus 119889119894(119905)) 119876
119894119909 (119905 minus 119889
119894(119905))
(29)
It holds that
4(119890 (119905))
=
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119875119890119890 (119905) + 119890
119879
(119905) 119875119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905) [(119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)] 119890 (119905)
(30)
From 0 le 119889120590(119905) le 120591 it is clear that
5(119890 (119905))
= 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus120591
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591 119890119879
(119905) 119877119890119890 (119905) minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
le 120591
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905) (119860119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890(119860119894119897minus 119871119894119897119862119894119892) 119890 (119905)
+ 119890119879
(119905 minus 119889119894(119905)) 119860
119879
ℎ119894119897119877119890119860ℎ119894119897119890 (119905 minus 119889
119894(119905))
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(31)
Mathematical Problems in Engineering 7
It is easy to derive the following
6(119890 (119905))
= 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894(119905)) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
(32)
At this point of the argument we should note that theoutput of the failure actuators is zero for 119908
119894sube Θ119894 Namely
only the residual normal actuators contribute to the time-delay switched fuzzy system It holds true that
119861119894119897119870119894119895= 119861119908119894119897119870119894119895 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894le 119861119908119894119897119870119894119895 (33)
Thus when 119909(119905) isin Ω119894 we have
119894(119909 (119905) 119890 (119905)) =
1(119905) +
2(119905) +
3(119905) +
4(119905)
+ 5(119905) +
6(119905)
(34)
Substituting (27) (28) (29) (30) (31) and (32) into (34)yields
119894(119909 (119905) 119890 (119905)) le Ψ
119894minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(35)
where
Ψ119894= Ξ119879
(119905) Π119894Ξ (119905)
Π119894=
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
(36)
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(37)
From (16) and (35) we know that 119894(119909(119905) 119890(119905)) lt 0
are well defined under the switching law (8) for arbitrary119909(119905) = 0 and 119890(119905) = 0 According to (35) we can concludethat the closed-loop system of (10a) (10b) and (10c) isasymptotically stable via the state-feedback controller (14b)under the switching law (8) when the actuators are seriousfailure and the observer error 119890(119905) asymptotically convergesto zero This ends the proof
Moreover we reformulate (36) into LMI problem Con-sidering (36) andmultiplying both sides of (36) by thematrixdiag119875minus1
119894 119868 119868 119868 (36) can be reformulated as follows
Π119894=
[[[
[
1205741112057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]
]
(38)
12057411= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
+ 120591(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
119877119894(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
+ 120591 (1205761+ 1205762) (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
times (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
) + 119875minus1
119894119876119894119875minus1
119894
12057412= 119860ℎ119894119897
12057413= 119871119894119897119862119894119892
12057422= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
8 Mathematical Problems in Engineering
12057433= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12057434= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12057444= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(39)
We restate as follows
Theorem 5 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies Assumption 1 If there exist constants120573119894119903(119894 119903 isin 119872) (either all nonnegative or all non-positive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12057411+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(40)
where lowast denotes the symmetric term then the closed-loopsystem (10a) (10b) and (10c) is asymptotically stable in zero bythe reliable controllers (14b) The parameters of formulae (14a)and (14b) satisfy (18) and (19)
It should be noted that the stability conditions (40) can betransformed into the linear matrix inequalities by using Schurrsquoscomplement Consider the following
[[[[[[[[[[[[[[[[[[[
[
12059011+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 120590121205901312059014120590150 120590170 0 0 0
lowast 120590220 0 0 0 0 0 0 0 0
lowast lowast 120590330 0 0 0 0 0 0 0
lowast lowast lowast 120590440 0 0 0 0 0 0
lowast lowast lowast lowast 12059055120590560 0 0 0 0
lowast lowast lowast lowast lowast 120590660 0 0 0 0
lowast lowast lowast lowast lowast lowast 12059077120590780 0 0
lowast lowast lowast lowast lowast lowast lowast 12059088120590890 0
lowast lowast lowast lowast lowast lowast lowast lowast 12059099120590910
0
lowast lowast lowast lowast lowast lowast lowast lowast lowast 12059010101205901011
lowast lowast lowast lowast lowast lowast lowast lowast lowast lowast 1205901111
]]]]]]]]]]]]]]]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(41)
where lowast denotes the symmetric term where
12059011= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
12059012= 119875minus1
119894
12059013= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059014= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059015= 119860ℎ119894119897
12059056= 119860119879
ℎ119894119897119877119894
12059017= 119871119894119897119862119894119892
12059078= 119862119879
119894119892119871119879
119894119897
12059089= 119862119879
119894119892119871119879
119894119897119877119894
120590910= (119860119894119897minus 119871119894119897119862119894119892)119879
12059022= minus 119876
119894
minus1
12059033= minus 120591
minus1
119877119894
minus1
12059044= minus
119868
120591 (1205761+ 1205762)
12059055= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897] minus (1 minus 119889
119894) 119876119894
12059066= minus 120591
minus1
1205761119868
12059077= (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12059088= minus 120591
minus1
119877119894
minus1
12059099= minus 120591
minus1
(120576minus1
2+ 120576minus1
3)minus1
119868
1205901010= minus 120591
minus1
119877119890
minus1
1205901011= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
1205901111= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(42)
Mathematical Problems in Engineering 9
Remark 6 The Lyapunov function (34) is multi-Lyapunovcontaining positive definite matrixes 119875
119894 119877119894 119876119894 119875119890 119877119890 and119876
119890
Therewill be somedifficulty to seek positive definitematrixeswhich induce some possible conservativeness different fromthe partition definite matrix method in [38] However weadopt the following methods to overcome the main sourcesof conservativeness
(1) Notice that the stable conditions in Theorem 5 are allof LMI form due to (41) we can solve the problem ofstabilization converting to the LMIsrsquo problem and themethod of augmenting matrix norm is avoided
(2) The maximum delay bound is obtained by solvingLMIs containing variables 119875
119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890
instead of preselecting 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890 Thus
optimizing positive definite matrices in order toobtain a less conservative delay bound can be easilyrealized
4 Illustrative Numerical Example
To illustrate the effectiveness of proposed approach thefollowing switched fuzzy system with time-varying delay isconsidered
1198771
1 if 119911 is 1198721
11 then
(119905) = 11986011119909 (119905) + 119860
ℎ11119909 (119905 minus 119889
1(119905)) + 119861
111199061(119905)
119910 (119905) = 11986211119909 (119905)
1198772
1 if 119911 is 1198722
11 then
(119905) = 11986012119909 (119905) + 119860
ℎ12119909 (119905 minus 119889
1(119905)) + 119861
121199061(119905)
119910 (119905) = 11986212119909 (119905)
1198771
2 if 120575 is 1198721
21 then
(119905) = 11986021119909 (119905) + 119860
ℎ21119909 (119905 minus 119889
2(119905)) + 119861
211199062(119905)
119910 (119905) = 11986221119909 (119905)
1198772
2 if 120575 is 1198722
21 then
(119905) = 11986022119909 (119905) + 119860
ℎ22119909 (119905 minus 119889
2(119905)) + 119861
221199062(119905)
119910 (119905) = 11986222119909 (119905)
(43)
along with system matrices
11986011= [minus45 3
0 2] 119860
12= [minus18 25
0 minus11]
11986021= [15 0
1 minus45] 119860
22= [minus12 0
minus4 minus5]
119860ℎ11= 119860ℎ12= [06 05
0 02] 119860
ℎ21= 119860ℎ22= [01 06
04 03]
11986111= 11986112= [1 2
0 2] 119861
21= 11986122= [2 0
2 5]
119861Θ11
= 119861Θ12
= [1 0
0 0] 119861
Θ21
= 119861Θ22
= [0 0
0 5]
11986211= 11986212= 11986221= 11986222= [2 0]
(44)
It should be noted that (119860119894119897 119861Θ119894119897
) is not a stable pair sys-temmatrices In turn a subsystem is unstablewhen failures ofactuators occur Nonetheless the reliable control problem issolvable via switching between unstable subsystems as provedin the previous section (see Theorem 3) If the time-varyingdelays are chosen as
1198891(119905) = 0003 minus 0003 sin (119905) (45a)
1198892(119905) = 001 minus 001 sin (119905) (45b)
then it is clear that 1198891le 0003 119889
2le 001 and 120591 le 002
The membership functions respectively are chosen as
1205831198721
11
(119911 (119905)) =1
1 + 119890minus2119911(119905) 120583
1198722
11
(119911 (119905)) = 1 minus 1205831198721
11
1205831198721
21
(120575 (119905)) =1
1 + 119890(minus2(120575(119905)minus03)) 120583
1198722
21
(120575 (119905)) = 1 minus 1205831198721
21
(46)
Then the parameters of controllers are defined
12058511= 12058512= 1 120585
21= 12058522= 08 120576
1= 1205762= 1205763= 001
(47)
Define the state observers as
119909 (119905) =
2
sum
119894=1
2
sum
119897=1
2
sum
119895=1
2
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119871119894119897119862119894119892119890 (119905) ]
(48)
upon choosing
12057211= 12057212= 3 120572
21= 12057222= 4
120573119894119903= 1 (119894 119903 = 1 2)
(49)
Solving inequality (16) one can find that
1198751= [02034 minus01141
minus01141 09462] 119875
2= [05998 minus00412
minus00412 15313]
1198771= [03148 minus01214
minus01214 09789] 119877
2= [06112 minus00291
minus00291 09891]
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
It is easy to derive the following
6(119890 (119905))
= 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894(119905)) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
le
119898
sum
119894=1
119873119894
sum
119897=1
119873119894
sum
119895=1
119873119894
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times 119890119879
(119905) 119876119890119890 (119905) minus (1 minus 119889
119894) 119890119879
(119905 minus 119889119894(119905)) 119876
119890119890 (119905 minus 119889
119894(119905))
(32)
At this point of the argument we should note that theoutput of the failure actuators is zero for 119908
119894sube Θ119894 Namely
only the residual normal actuators contribute to the time-delay switched fuzzy system It holds true that
119861119894119897119870119894119895= 119861119908119894119897119870119894119895 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894le 119861119908119894119897119870119894119895 (33)
Thus when 119909(119905) isin Ω119894 we have
119894(119909 (119905) 119890 (119905)) =
1(119905) +
2(119905) +
3(119905) +
4(119905)
+ 5(119905) +
6(119905)
(34)
Substituting (27) (28) (29) (30) (31) and (32) into (34)yields
119894(119909 (119905) 119890 (119905)) le Ψ
119894minus int
119905
119905minus119889119894(119905)
119909119879
(119904) 119877119894
119909 (119904) 119889119904
minus int
119905
119905minus119889119894(119905)
119890119879
(119904) 119877119890119890 (119904) 119889119904
(35)
where
Ψ119894= Ξ119879
(119905) Π119894Ξ (119905)
Π119894=
[[[
[
1205871112058712120587130
lowast 120587220 0
lowast lowast 1205873312058734
lowast lowast lowast 12058744
]]]
]
(36)
12058711= 119860119879
119894119897119875119894+ 119875119894119860119894119897minus 120572119894119897119875119894119861Θ119894119895
119861119879
Θ119894119897
119875119894minus 120572119894119895119875119894119861Θ119894119897
119861119879
Θ119894119895
119875119894
+ 120591(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
119877119894(119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
+ 120591 (1205761+ 1205762) (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894)
119879
times (119860119894119897minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
119875119894) + 119876
119894
12058712= 119875119894119860ℎ119894119897
12058713= 119875119894119871119894119897119862119894119892
12058722= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
12058733= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12058734= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12058744= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(37)
From (16) and (35) we know that 119894(119909(119905) 119890(119905)) lt 0
are well defined under the switching law (8) for arbitrary119909(119905) = 0 and 119890(119905) = 0 According to (35) we can concludethat the closed-loop system of (10a) (10b) and (10c) isasymptotically stable via the state-feedback controller (14b)under the switching law (8) when the actuators are seriousfailure and the observer error 119890(119905) asymptotically convergesto zero This ends the proof
Moreover we reformulate (36) into LMI problem Con-sidering (36) andmultiplying both sides of (36) by thematrixdiag119875minus1
119894 119868 119868 119868 (36) can be reformulated as follows
Π119894=
[[[
[
1205741112057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]
]
(38)
12057411= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
+ 120591(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
119877119894(119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
+ 120591 (1205761+ 1205762) (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
times (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
) + 119875minus1
119894119876119894119875minus1
119894
12057412= 119860ℎ119894119897
12057413= 119871119894119897119862119894119892
12057422= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 120576minus1
1119860119879
ℎ119894119897119877119894119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897]
minus (1 minus 119889119894) 119876119894
8 Mathematical Problems in Engineering
12057433= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12057434= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12057444= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(39)
We restate as follows
Theorem 5 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies Assumption 1 If there exist constants120573119894119903(119894 119903 isin 119872) (either all nonnegative or all non-positive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12057411+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(40)
where lowast denotes the symmetric term then the closed-loopsystem (10a) (10b) and (10c) is asymptotically stable in zero bythe reliable controllers (14b) The parameters of formulae (14a)and (14b) satisfy (18) and (19)
It should be noted that the stability conditions (40) can betransformed into the linear matrix inequalities by using Schurrsquoscomplement Consider the following
[[[[[[[[[[[[[[[[[[[
[
12059011+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 120590121205901312059014120590150 120590170 0 0 0
lowast 120590220 0 0 0 0 0 0 0 0
lowast lowast 120590330 0 0 0 0 0 0 0
lowast lowast lowast 120590440 0 0 0 0 0 0
lowast lowast lowast lowast 12059055120590560 0 0 0 0
lowast lowast lowast lowast lowast 120590660 0 0 0 0
lowast lowast lowast lowast lowast lowast 12059077120590780 0 0
lowast lowast lowast lowast lowast lowast lowast 12059088120590890 0
lowast lowast lowast lowast lowast lowast lowast lowast 12059099120590910
0
lowast lowast lowast lowast lowast lowast lowast lowast lowast 12059010101205901011
lowast lowast lowast lowast lowast lowast lowast lowast lowast lowast 1205901111
]]]]]]]]]]]]]]]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(41)
where lowast denotes the symmetric term where
12059011= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
12059012= 119875minus1
119894
12059013= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059014= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059015= 119860ℎ119894119897
12059056= 119860119879
ℎ119894119897119877119894
12059017= 119871119894119897119862119894119892
12059078= 119862119879
119894119892119871119879
119894119897
12059089= 119862119879
119894119892119871119879
119894119897119877119894
120590910= (119860119894119897minus 119871119894119897119862119894119892)119879
12059022= minus 119876
119894
minus1
12059033= minus 120591
minus1
119877119894
minus1
12059044= minus
119868
120591 (1205761+ 1205762)
12059055= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897] minus (1 minus 119889
119894) 119876119894
12059066= minus 120591
minus1
1205761119868
12059077= (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12059088= minus 120591
minus1
119877119894
minus1
12059099= minus 120591
minus1
(120576minus1
2+ 120576minus1
3)minus1
119868
1205901010= minus 120591
minus1
119877119890
minus1
1205901011= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
1205901111= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(42)
Mathematical Problems in Engineering 9
Remark 6 The Lyapunov function (34) is multi-Lyapunovcontaining positive definite matrixes 119875
119894 119877119894 119876119894 119875119890 119877119890 and119876
119890
Therewill be somedifficulty to seek positive definitematrixeswhich induce some possible conservativeness different fromthe partition definite matrix method in [38] However weadopt the following methods to overcome the main sourcesof conservativeness
(1) Notice that the stable conditions in Theorem 5 are allof LMI form due to (41) we can solve the problem ofstabilization converting to the LMIsrsquo problem and themethod of augmenting matrix norm is avoided
(2) The maximum delay bound is obtained by solvingLMIs containing variables 119875
119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890
instead of preselecting 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890 Thus
optimizing positive definite matrices in order toobtain a less conservative delay bound can be easilyrealized
4 Illustrative Numerical Example
To illustrate the effectiveness of proposed approach thefollowing switched fuzzy system with time-varying delay isconsidered
1198771
1 if 119911 is 1198721
11 then
(119905) = 11986011119909 (119905) + 119860
ℎ11119909 (119905 minus 119889
1(119905)) + 119861
111199061(119905)
119910 (119905) = 11986211119909 (119905)
1198772
1 if 119911 is 1198722
11 then
(119905) = 11986012119909 (119905) + 119860
ℎ12119909 (119905 minus 119889
1(119905)) + 119861
121199061(119905)
119910 (119905) = 11986212119909 (119905)
1198771
2 if 120575 is 1198721
21 then
(119905) = 11986021119909 (119905) + 119860
ℎ21119909 (119905 minus 119889
2(119905)) + 119861
211199062(119905)
119910 (119905) = 11986221119909 (119905)
1198772
2 if 120575 is 1198722
21 then
(119905) = 11986022119909 (119905) + 119860
ℎ22119909 (119905 minus 119889
2(119905)) + 119861
221199062(119905)
119910 (119905) = 11986222119909 (119905)
(43)
along with system matrices
11986011= [minus45 3
0 2] 119860
12= [minus18 25
0 minus11]
11986021= [15 0
1 minus45] 119860
22= [minus12 0
minus4 minus5]
119860ℎ11= 119860ℎ12= [06 05
0 02] 119860
ℎ21= 119860ℎ22= [01 06
04 03]
11986111= 11986112= [1 2
0 2] 119861
21= 11986122= [2 0
2 5]
119861Θ11
= 119861Θ12
= [1 0
0 0] 119861
Θ21
= 119861Θ22
= [0 0
0 5]
11986211= 11986212= 11986221= 11986222= [2 0]
(44)
It should be noted that (119860119894119897 119861Θ119894119897
) is not a stable pair sys-temmatrices In turn a subsystem is unstablewhen failures ofactuators occur Nonetheless the reliable control problem issolvable via switching between unstable subsystems as provedin the previous section (see Theorem 3) If the time-varyingdelays are chosen as
1198891(119905) = 0003 minus 0003 sin (119905) (45a)
1198892(119905) = 001 minus 001 sin (119905) (45b)
then it is clear that 1198891le 0003 119889
2le 001 and 120591 le 002
The membership functions respectively are chosen as
1205831198721
11
(119911 (119905)) =1
1 + 119890minus2119911(119905) 120583
1198722
11
(119911 (119905)) = 1 minus 1205831198721
11
1205831198721
21
(120575 (119905)) =1
1 + 119890(minus2(120575(119905)minus03)) 120583
1198722
21
(120575 (119905)) = 1 minus 1205831198721
21
(46)
Then the parameters of controllers are defined
12058511= 12058512= 1 120585
21= 12058522= 08 120576
1= 1205762= 1205763= 001
(47)
Define the state observers as
119909 (119905) =
2
sum
119894=1
2
sum
119897=1
2
sum
119895=1
2
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119871119894119897119862119894119892119890 (119905) ]
(48)
upon choosing
12057211= 12057212= 3 120572
21= 12057222= 4
120573119894119903= 1 (119894 119903 = 1 2)
(49)
Solving inequality (16) one can find that
1198751= [02034 minus01141
minus01141 09462] 119875
2= [05998 minus00412
minus00412 15313]
1198771= [03148 minus01214
minus01214 09789] 119877
2= [06112 minus00291
minus00291 09891]
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
12057433= 120591 [119862
119879
119894119892119871119879
119894119897119877119894119871119894119897119862119894119892+ (120576minus1
2+ 120576minus1
3) 119862119879
119894119892119871119879
119894119897119877119894119877119894119871119894119897119862119894119892]
+ (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892)
+ 120591(119860119894119897minus 119871119894119897119862119894119892)119879
119877119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12057434= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
12057444= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(39)
We restate as follows
Theorem 5 Suppose that the switched fuzzy system (10a)(10b) and (10c) satisfies Assumption 1 If there exist constants120573119894119903(119894 119903 isin 119872) (either all nonnegative or all non-positive)
positive definite matrixes 119875119894 119877119894 119876119894 119875119890 119877119890 119876119890 and a group
of positive scalars constants 120572119894119895 120585119894119897 1205761 1205762 1205763 satisfying the
inequalities
[[[[[
[
12057411+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 12057412120574130
lowast 120574220 0
lowast lowast 1205743312057434
lowast lowast lowast 12057444
]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(40)
where lowast denotes the symmetric term then the closed-loopsystem (10a) (10b) and (10c) is asymptotically stable in zero bythe reliable controllers (14b) The parameters of formulae (14a)and (14b) satisfy (18) and (19)
It should be noted that the stability conditions (40) can betransformed into the linear matrix inequalities by using Schurrsquoscomplement Consider the following
[[[[[[[[[[[[[[[[[[[
[
12059011+
119898
sum
119903=1
120573119894119903(119875119894minus 119875119903) 120590121205901312059014120590150 120590170 0 0 0
lowast 120590220 0 0 0 0 0 0 0 0
lowast lowast 120590330 0 0 0 0 0 0 0
lowast lowast lowast 120590440 0 0 0 0 0 0
lowast lowast lowast lowast 12059055120590560 0 0 0 0
lowast lowast lowast lowast lowast 120590660 0 0 0 0
lowast lowast lowast lowast lowast lowast 12059077120590780 0 0
lowast lowast lowast lowast lowast lowast lowast 12059088120590890 0
lowast lowast lowast lowast lowast lowast lowast lowast 12059099120590910
0
lowast lowast lowast lowast lowast lowast lowast lowast lowast 12059010101205901011
lowast lowast lowast lowast lowast lowast lowast lowast lowast lowast 1205901111
]]]]]]]]]]]]]]]]]]]
]
lt 0
119894 = 1 119898 119897 119895 119892 = 1 2 119873119894
(41)
where lowast denotes the symmetric term where
12059011= 119875minus1
119894119860119879
119894119897+ 119860119894119897119875minus1
119894minus 120572119894119897119861Θ119894119895
119861119879
Θ119894119897
minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
12059012= 119875minus1
119894
12059013= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059014= (119860119894119897119875minus1
119894minus 120572119894119895119861Θ119894119897
119861119879
Θ119894119895
)
119879
12059015= 119860ℎ119894119897
12059056= 119860119879
ℎ119894119897119877119894
12059017= 119871119894119897119862119894119892
12059078= 119862119879
119894119892119871119879
119894119897
12059089= 119862119879
119894119892119871119879
119894119897119877119894
120590910= (119860119894119897minus 119871119894119897119862119894119892)119879
12059022= minus 119876
119894
minus1
12059033= minus 120591
minus1
119877119894
minus1
12059044= minus
119868
120591 (1205761+ 1205762)
12059055= 120591 [119860
119879
ℎ119894119897119877119894119860ℎ119894119897+ 1205763119860119879
ℎ119894119897119860ℎ119894119897] minus (1 minus 119889
119894) 119876119894
12059066= minus 120591
minus1
1205761119868
12059077= (119860119894119897minus 119871119894119897119862119894119892)119879
119875119890+ 119875119890(119860119894119897minus 119871119894119897119862119894119892) + 119876119890
12059088= minus 120591
minus1
119877119894
minus1
12059099= minus 120591
minus1
(120576minus1
2+ 120576minus1
3)minus1
119868
1205901010= minus 120591
minus1
119877119890
minus1
1205901011= 119875119890119860ℎ119894119897+ 120591(119860
119894119897minus 119871119894119897119862119894119892)119879
119877119890119860ℎ119894119897
1205901111= 120591119860119879
ℎ119894119897119877119890119860ℎ119894119897minus (1 minus 119889
119894) 119876119890
(42)
Mathematical Problems in Engineering 9
Remark 6 The Lyapunov function (34) is multi-Lyapunovcontaining positive definite matrixes 119875
119894 119877119894 119876119894 119875119890 119877119890 and119876
119890
Therewill be somedifficulty to seek positive definitematrixeswhich induce some possible conservativeness different fromthe partition definite matrix method in [38] However weadopt the following methods to overcome the main sourcesof conservativeness
(1) Notice that the stable conditions in Theorem 5 are allof LMI form due to (41) we can solve the problem ofstabilization converting to the LMIsrsquo problem and themethod of augmenting matrix norm is avoided
(2) The maximum delay bound is obtained by solvingLMIs containing variables 119875
119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890
instead of preselecting 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890 Thus
optimizing positive definite matrices in order toobtain a less conservative delay bound can be easilyrealized
4 Illustrative Numerical Example
To illustrate the effectiveness of proposed approach thefollowing switched fuzzy system with time-varying delay isconsidered
1198771
1 if 119911 is 1198721
11 then
(119905) = 11986011119909 (119905) + 119860
ℎ11119909 (119905 minus 119889
1(119905)) + 119861
111199061(119905)
119910 (119905) = 11986211119909 (119905)
1198772
1 if 119911 is 1198722
11 then
(119905) = 11986012119909 (119905) + 119860
ℎ12119909 (119905 minus 119889
1(119905)) + 119861
121199061(119905)
119910 (119905) = 11986212119909 (119905)
1198771
2 if 120575 is 1198721
21 then
(119905) = 11986021119909 (119905) + 119860
ℎ21119909 (119905 minus 119889
2(119905)) + 119861
211199062(119905)
119910 (119905) = 11986221119909 (119905)
1198772
2 if 120575 is 1198722
21 then
(119905) = 11986022119909 (119905) + 119860
ℎ22119909 (119905 minus 119889
2(119905)) + 119861
221199062(119905)
119910 (119905) = 11986222119909 (119905)
(43)
along with system matrices
11986011= [minus45 3
0 2] 119860
12= [minus18 25
0 minus11]
11986021= [15 0
1 minus45] 119860
22= [minus12 0
minus4 minus5]
119860ℎ11= 119860ℎ12= [06 05
0 02] 119860
ℎ21= 119860ℎ22= [01 06
04 03]
11986111= 11986112= [1 2
0 2] 119861
21= 11986122= [2 0
2 5]
119861Θ11
= 119861Θ12
= [1 0
0 0] 119861
Θ21
= 119861Θ22
= [0 0
0 5]
11986211= 11986212= 11986221= 11986222= [2 0]
(44)
It should be noted that (119860119894119897 119861Θ119894119897
) is not a stable pair sys-temmatrices In turn a subsystem is unstablewhen failures ofactuators occur Nonetheless the reliable control problem issolvable via switching between unstable subsystems as provedin the previous section (see Theorem 3) If the time-varyingdelays are chosen as
1198891(119905) = 0003 minus 0003 sin (119905) (45a)
1198892(119905) = 001 minus 001 sin (119905) (45b)
then it is clear that 1198891le 0003 119889
2le 001 and 120591 le 002
The membership functions respectively are chosen as
1205831198721
11
(119911 (119905)) =1
1 + 119890minus2119911(119905) 120583
1198722
11
(119911 (119905)) = 1 minus 1205831198721
11
1205831198721
21
(120575 (119905)) =1
1 + 119890(minus2(120575(119905)minus03)) 120583
1198722
21
(120575 (119905)) = 1 minus 1205831198721
21
(46)
Then the parameters of controllers are defined
12058511= 12058512= 1 120585
21= 12058522= 08 120576
1= 1205762= 1205763= 001
(47)
Define the state observers as
119909 (119905) =
2
sum
119894=1
2
sum
119897=1
2
sum
119895=1
2
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119871119894119897119862119894119892119890 (119905) ]
(48)
upon choosing
12057211= 12057212= 3 120572
21= 12057222= 4
120573119894119903= 1 (119894 119903 = 1 2)
(49)
Solving inequality (16) one can find that
1198751= [02034 minus01141
minus01141 09462] 119875
2= [05998 minus00412
minus00412 15313]
1198771= [03148 minus01214
minus01214 09789] 119877
2= [06112 minus00291
minus00291 09891]
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Remark 6 The Lyapunov function (34) is multi-Lyapunovcontaining positive definite matrixes 119875
119894 119877119894 119876119894 119875119890 119877119890 and119876
119890
Therewill be somedifficulty to seek positive definitematrixeswhich induce some possible conservativeness different fromthe partition definite matrix method in [38] However weadopt the following methods to overcome the main sourcesof conservativeness
(1) Notice that the stable conditions in Theorem 5 are allof LMI form due to (41) we can solve the problem ofstabilization converting to the LMIsrsquo problem and themethod of augmenting matrix norm is avoided
(2) The maximum delay bound is obtained by solvingLMIs containing variables 119875
119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890
instead of preselecting 119875119894 119877119894 119876119894 119875119890 119877119890 and 119876
119890 Thus
optimizing positive definite matrices in order toobtain a less conservative delay bound can be easilyrealized
4 Illustrative Numerical Example
To illustrate the effectiveness of proposed approach thefollowing switched fuzzy system with time-varying delay isconsidered
1198771
1 if 119911 is 1198721
11 then
(119905) = 11986011119909 (119905) + 119860
ℎ11119909 (119905 minus 119889
1(119905)) + 119861
111199061(119905)
119910 (119905) = 11986211119909 (119905)
1198772
1 if 119911 is 1198722
11 then
(119905) = 11986012119909 (119905) + 119860
ℎ12119909 (119905 minus 119889
1(119905)) + 119861
121199061(119905)
119910 (119905) = 11986212119909 (119905)
1198771
2 if 120575 is 1198721
21 then
(119905) = 11986021119909 (119905) + 119860
ℎ21119909 (119905 minus 119889
2(119905)) + 119861
211199062(119905)
119910 (119905) = 11986221119909 (119905)
1198772
2 if 120575 is 1198722
21 then
(119905) = 11986022119909 (119905) + 119860
ℎ22119909 (119905 minus 119889
2(119905)) + 119861
221199062(119905)
119910 (119905) = 11986222119909 (119905)
(43)
along with system matrices
11986011= [minus45 3
0 2] 119860
12= [minus18 25
0 minus11]
11986021= [15 0
1 minus45] 119860
22= [minus12 0
minus4 minus5]
119860ℎ11= 119860ℎ12= [06 05
0 02] 119860
ℎ21= 119860ℎ22= [01 06
04 03]
11986111= 11986112= [1 2
0 2] 119861
21= 11986122= [2 0
2 5]
119861Θ11
= 119861Θ12
= [1 0
0 0] 119861
Θ21
= 119861Θ22
= [0 0
0 5]
11986211= 11986212= 11986221= 11986222= [2 0]
(44)
It should be noted that (119860119894119897 119861Θ119894119897
) is not a stable pair sys-temmatrices In turn a subsystem is unstablewhen failures ofactuators occur Nonetheless the reliable control problem issolvable via switching between unstable subsystems as provedin the previous section (see Theorem 3) If the time-varyingdelays are chosen as
1198891(119905) = 0003 minus 0003 sin (119905) (45a)
1198892(119905) = 001 minus 001 sin (119905) (45b)
then it is clear that 1198891le 0003 119889
2le 001 and 120591 le 002
The membership functions respectively are chosen as
1205831198721
11
(119911 (119905)) =1
1 + 119890minus2119911(119905) 120583
1198722
11
(119911 (119905)) = 1 minus 1205831198721
11
1205831198721
21
(120575 (119905)) =1
1 + 119890(minus2(120575(119905)minus03)) 120583
1198722
21
(120575 (119905)) = 1 minus 1205831198721
21
(46)
Then the parameters of controllers are defined
12058511= 12058512= 1 120585
21= 12058522= 08 120576
1= 1205762= 1205763= 001
(47)
Define the state observers as
119909 (119905) =
2
sum
119894=1
2
sum
119897=1
2
sum
119895=1
2
sum
119892=1
V119894(119909 (119905)) 120578
119894119897(120585 (119905)) 120578
119894119895(120585 (119905)) 120578
119894119892(120585 (119905))
times [(119860119894119897minus 119861119894119897119870119894119895) 119909 (119905) + 119860
ℎ119894119897119909 (119905 minus 119889
119894(119905))
+ 119871119894119897119862119894119892119890 (119905) ]
(48)
upon choosing
12057211= 12057212= 3 120572
21= 12057222= 4
120573119894119903= 1 (119894 119903 = 1 2)
(49)
Solving inequality (16) one can find that
1198751= [02034 minus01141
minus01141 09462] 119875
2= [05998 minus00412
minus00412 15313]
1198771= [03148 minus01214
minus01214 09789] 119877
2= [06112 minus00291
minus00291 09891]
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
10 Mathematical Problems in Engineering
0 1 2 3 4 5 6 7 8
0
2
4
Time (s)
e1
e2
minus2
minus4
minus6
minus8
minus10
minus12
minus14
minus16
e(t)
(a)
0 05 1 15 2
0
5
10
15
20
25
30
35
40
45
Time (s)
U1
U2
minus5
ui(t)
(b)Figure 1 (a) The observer error trajectories of SFS with time-varying delay and (b) control signal of the reliable controller
1198761= [06471 minus02438
minus02438 11231] 119876
2= [09876 minus01128
minus01128 08532]
119875119890= [04924 minus02089
minus02089 09479] 119877
119890= [05133 minus02087
minus02087 08921]
119876119890= [06127 minus00921
minus00921 09432]
(50)From (18) the observer gain matrices are derived as
follows11987111= 11987112= [44807
09875] 119871
21= 11987122= [35845
07900] (51)
Next defineΩ1= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198751minus 1198752) 119909 (119905) ge 0 119909 (119905) = 0
Ω2= 119909 (119905) isin 119877
2
| 119909(119905)119879
(1198752minus 1198751) 119909 (119905) ge 0 119909 (119905) = 0
(52)
Then Ω1cup Ω2= R2 0 Thus the closed-loop system is
asymptotic stability under the following switching law
120590 (119905) = 1 119909 (119905) isin Ω
1
2 119909 (119905) isin Ω2 Ω1
(53)
From (19) we obtain output feedback controller
11987011= 11987012= [06102 minus03423
0 0]
11987021= 11987022= [
0 0
minus08240 306260]
(54)
A simulation has been performed with the initial states119909(0) = [minus15 3]
119879 and the time-varying delay chosen as(45a) (45b)The simulation results for the observer error andcontrol signal are depicted in Figure 1
5 Conclusion
In this paper the problem of reliable control for nonlinearsystems represented by time-varying delay switched fuzzysystems has been investigated Firstly a model of switchedfuzzy systems which combines reliable control and switchedfuzzy control was presented and all subsystems of theswitching system are time-varying delay fuzzy systems Inparticular attention was focused on actuators that may sufferldquoserious faultsrdquo
Reliable controllers and switching law are designed suchthat they make the switched fuzzy systems asymptotic sta-bility based on the switching strategy that is switchingbetween faulty actuators Moreover the switching strategy isdependent on the state of observer error Finally a numericalexample has been provided to illustrate the efficiency of theproposed reliable controller design and observer switchinglaw methodology
Acknowledgments
This work is supported by National Nature Science Foun-dation under Grant 61004039 by the Science Foundation ofEducational Department of Liaoning Province under GrantL2010374 and also by the key laboratory for manufacturingindustrial integrated automation of Liaoning Province Theauthors would like to thank Professor Ximing Sun for hisvaluable comments
References
[1] H-NWu J-WWang and H-X Li ldquoDesign of distributed119867infin
fuzzy controllers with constraint for nonlinear hyperbolic PDEsystemsrdquo Automatica vol 48 no 10 pp 2535ndash2543 2012
Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
[2] L G Wu X J Su P Shi and J Qiu ldquoModel approximation fordiscrete-time state-delay systems in the TS fuzzy frameworkrdquoIEEE Transactions on Fuzzy Systems vol 19 no 2 pp 366ndash3782011
[3] X J Su L G Wu and P Shi ldquoSenor networks with randomlink failures distributed filtering for T-S fuzzy systemsrdquo IEEETransactions on Industrial Informatics no 99 2012
[4] L G Wu X J Su P Shi and J Qiu ldquoA new approach tostability analysis and stabilization of discrete-time T-S fuzzytime-varying delay systemsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 41 no 1 pp 273ndash286 2011
[5] X Liu andQ Zhang ldquoNew approaches to119867infincontroller designs
based on fuzzy observers for T-S fuzzy systems via LMIrdquoAutomatica vol 39 no 9 pp 1571ndash1582 2003
[6] X J Su P Shi L G Wu and Y D Song ldquoA novel controldesign on discrete-time Takagi-Sugeno fuzzy systems withtime-varying delaysrdquo IEEE Transactions on Fuzzy Systems no99 2012
[7] K Tanaka T Hori and H O Wang ldquoA multiple Lyapunovfunction approach to stabilization of fuzzy control systemsrdquoIEEE Transactions on Fuzzy Systems vol 11 no 4 pp 582ndash5892003
[8] G Chen and D Zhang ldquoBack-driving a truck with suboptimaldistance trajectories a fuzzy logic control approachrdquo IEEETransactions on Fuzzy Systems vol 5 no 3 pp 369ndash380 1997
[9] D Filev and P Angelov ldquoFuzzy optimal controlrdquo Fuzzy Sets andSystems vol 47 no 2 pp 151ndash156 1992
[10] M Sugeno ldquoOn stability of fuzzy systems expressed by fuzzyrules with singleton consequentsrdquo IEEE Transactions on FuzzySystems vol 7 no 2 pp 201ndash224 1999
[11] T Takagi and M Sugeno ldquoFuzzy identification of systems andits applications to modeling and controlrdquo IEEE Transactions onSystems Man and Cybernetics vol 15 no 1 pp 116ndash132 1985
[12] F Delmotte T M Guerra and M Ksantini ldquoContinuousTakagi-Sugenorsquos models reduction of the number of LMIconditions in various fuzzy control design technicsrdquo IEEETransactions on Fuzzy Systems vol 15 no 3 pp 426ndash438 2007
[13] R Palm and D Driankov ldquoFuzzy switched hybrid systems- modeling and identificationrdquo in Proceedings of the IEEEInternational Symposium on Intelligent Control (ISIC rsquo98) pp130ndash135 September 1998
[14] K Tanaka M Iwasaki and H O Wang ldquoSwitching control ofan RC hovercraft stabilization and smooth switchingrdquo IEEETransactions on Systems Man and Cybernetics B vol 31 no 6pp 853ndash863 2001
[15] K Tanaka M Iwasaki and H O Wang ldquoStability and smooth-ness conditions for switching fuzzy systemsrdquo in Proceedings ofthe American Control Conference pp 2474ndash2478 June 2000
[16] K Tanaka M Iwasaki and H O Wang ldquoStable switchingfuzzy control and its application to a hovercraft type vehiclerdquo inProceedings of the 9th IEEE International Conference on FuzzySystems (FUZZ-IEEE rsquo00) pp 804ndash809 May 2000
[17] W J Wang Y J Chen and C H Sun ldquoRelaxed stabilizationcriteria for discrete-time T-S fuzzy control systems based on aswitching fuzzy model and piecewise Lyapunov functionrdquo IEEETransactions on Systems Man and Cybernetics B vol 37 no 3pp 551ndash559 2007
[18] H Yang L Zhang and X Liu ldquoRobust tracking controlfor switched fuzzy systems with fast switching controllerrdquoMathematical Problems in Engineering vol 2012 Article ID872826 21 pages 2012
[19] L Zhang and Y W Jing ldquoRobust adaptive reliable trackingcontrol of uncertain switched fuzzy systems using T-S modelsrdquoin Proceedings of the International Conference on Impulsive andHybrid Dynamical Systems pp 910ndash913
[20] H Ohtake K Tanaka and H O Wang ldquoFuzzy modelingvia sector nonlinearity conceptrdquo Integrated Computer-AidedEngineering vol 10 no 4 pp 333ndash341 2003
[21] G Zhang C Han Y Guan and L Wu ldquoExponential stabilityanalysis and stabilization of discrete-time nonlinear switchedsystems with time delaysrdquo International Journal of InnovativeComputing Information and Control vol 8 no 3A pp 1973ndash1986 2012
[22] S B Attia S Salhi andM Ksouri ldquoStatic switched output feed-back stabilization for linear discrete-time switched systemsrdquoInternational Journal of Innovative Computing Information andControl vol 8 no 5 pp 3203ndash3213 2012
[23] J Dai J Mao W Wan Y Li and M J Er ldquoFuzzy swithchingcontrol law design for helicoptersrdquo in Proceedings of the IEEERegion 10 Conference on Computers Communications Controland Power Engineering pp 1634ndash1637 October 2002
[24] C Y Chang S W Hsu and K H Chiang ldquoThe switching fuzzycontroller of the overhead crane systemrdquo in Proceedings of theIEEE International Conference on Control Applications pp 753ndash758 Taipei Taiwan September 2004
[25] K Izumi KWatanabe K Ichida andY Tachibana ldquoThe designof fuzzy energy regions optimized byGA for a switching controlof multi-link underactuatedmanipulatorsrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo07) pp 24ndash29 October 2007
[26] L Wu and D W C Ho ldquoFuzzy filter design for Ito stochasticsystems with application to sensor fault detectionrdquo IEEE Trans-actions on Fuzzy Systems vol 17 no 1 pp 233ndash242 2009
[27] G S Zhai and H Lin ldquoController failure time analysis for sym-metric 119867
infincontrol systemsrdquo International Journal of Control
vol 77 no 6 pp 598ndash605 2004[28] J P Hespanha P Naghshtabrizi and Y Xu ldquoA survey of recent
results in networked control systemsrdquo Proceedings of the IEEEvol 95 no 1 pp 138ndash172 2007
[29] B Jiang M Staroswiecki and V Cocquempot ldquoFault diagnosisbased on adaptive observer for a class of non-linear systemswith unknown parametersrdquo International Journal of Controlvol 77 no 4 pp 415ndash426 2004
[30] Z Sun ldquoA robust stabilizing law for switched linear systemsrdquoInternational Journal of Control vol 77 no 4 pp 389ndash398 2004
[31] H Wu ldquoReliable LQ fuzzy control for continuous-time nonlin-ear systems with actuator faultsrdquo IEEE Transactions on SystemsMan and Cybernetics B vol 34 no 4 pp 1743ndash1752 2004
[32] Q Hu B Xiao andM I Friswell ldquoRobust fault-tolerant controlfor spacecraft attitude stabilisation subject to input saturationrdquoIET Control Theory amp Applications vol 5 no 2 pp 271ndash2822011
[33] E Tian D Yue and C Peng ldquoReliable control for networkedcontrol systems with probabilistic sensors and actuators faultsrdquoIETControlTheory andApplications vol 4 no 8 pp 1478ndash14882010
[34] R Wang J Zhao and G M Dimirovski ldquoReliable119867infincontrol
for a class of switched nonlinear systemsrdquo in Proceedings of theof the 16th IFAC World Congress pp 1ndash6 IEEE Prague CzechRepublic 2005
[35] L Zhang X Liu and H Yang ldquoRobust reliable control for aclass of uncertain switched fuzzy systems based on observers
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
12 Mathematical Problems in Engineering
switchingrdquo in Proceedings of the International Conference onIntelligent Control and Information Processing (ICICIP rsquo10) pp207ndash212 August 2010
[36] L Wu and W X Zheng ldquoWeighted 119867infin
model reduction forlinear switched systems with time-varying delayrdquo Automaticavol 45 no 1 pp 186ndash193 2009
[37] LWu Z Feng andW X Zheng ldquoExponential stability analysisfor delayed neural networks with switching parameters averagedwell time approachrdquo IEEE Transactions on Neural Networksvol 21 no 9 pp 1396ndash1407 2010
[38] L Wu and W X Zheng ldquoL2-Linfin
control of nonlinear fuzzy itostochastic delay systems via dynamic output feedbackrdquo IEEETransactions on Systems Man and Cybernetics B vol 39 no 5pp 1308ndash1315 2009
[39] R Yang P Shi G-P Liu andH Gao ldquoNetwork-based feedbackcontrol for systems with mixed delays based on quantizationand dropout compensationrdquo Automatica vol 47 no 12 pp2805ndash2809 2011
[40] X-M Sun G-P Liu D Rees and W Wang ldquoStability ofsystemswith controller failure and time-varying delayrdquo Instituteof Electrical and Electronics Engineers vol 53 no 10 pp 2391ndash2396 2008
[41] X Sun W Wang G Liu and J Zhao ldquoStability analysisfor linear switched systems with time-varying delayrdquo IEEETransactions on Systems Man and Cybernetics B vol 38 no2 pp 528ndash533 2008
[42] X-M Sun G-P Liu W Wang and D Rees ldquoStability analysisfor networked control systems based on average dwell timemethodrdquo International Journal of Robust and Nonlinear Controlvol 20 no 15 pp 1774ndash1784 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
















![Control of Periodically Time-Varying Systems with Delay ...wseas.us/e-library/transactions/systems/2010/89-737.pdf · developed in [8], [9] and applied for robust control of time-delay](https://img.pdfslide.net/doc/110x75/605b6bd34e60175e13525680/control-of-periodically-time-varying-systems-with-delay-wseasuse-librarytransactionssystems201089-737pdf.jpg)