Embed Size (px)
Citation preview

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 243094 9 pageshttpdxdoiorg1011552013243094
Research ArticleDSP- and FPGA-Based Stair-Climbing Robot Design
Ming-Shyan Wang Che-Min Mi Shih-Yu Wu and Yi-Ming Tu
Department of Electrical Engineering Southern Taiwan University of Science and Technology 1 Nan-Tai StreetYung Kang District Tainan 710 Taiwan
Correspondence should be addressed to Ming-Shyan Wang mswangmailstustedutw
Received 15 September 2013 Accepted 3 October 2013
Academic Editor Teen-Hang Meen
Copyright copy 2013 Ming-Shyan Wang et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
A stair-climbing robot is equipped with a grasping arm for capturing objects to provide service for the elders A board based on adigital signal processor (DSP) plays the role of control center tomanage all actions of two brushless DCmotors for locomotion twoworm gears for torque magnification and two DC motors for armsrsquo pitching in the main body The robot is steered by fuzzy logiccontrol (FLC)which integrates the outputs ofDCbus current sensor and an inclinometerThere is aCMOS camera for vision used inthe robot and the grasping arm is controlled via the video camera for capturing objects Simple algorithms of image processing areimplemented in the field programmable gate array (FPGA) board that generates the X-axis and Y-axis commands of the graspingarm to captureload objects Three walking experiments of the stair-climbing robot to move up and down stairs are shown in thetaped pictures from videos The object tracking and capturing by the grasping arm and camera verifies the proposed design
1 Introduction
Research on service robots has been attended in recent yearsOne of the most important reasons is the growing of agingpopulation and decreasing of working population It is not along-term way by hiring many foreigners with cheaper pay-ment to work at factories or to take home-caring job for theelder or disabled As a result for the latter home-caring robotis an excellent candidate capable of supporting such an agingsociety Specifically the elders can control the robots directlyfor service
The robot designed to directly carry elders up and downstairs needs a large vehicle and the stair rail for movingThe robot ldquoHRP-2rdquo from Harada successfully climbed up280mm stairs by grasping the stair rail [1] The robot ldquoWL-16RIIrdquo [2] can walk independently and allow users to build itsupper body based on their requirements such as a walkingwheelchair or as a walking support machine that is able towalk up and down stairs carrying or assisting an elder Thedeveloped biped locomotor with Stewart platform legs suc-cessfully achieved walking up and down on stairs for 250mmcontinuously and carrying 60 kg man on it Another biped-type robot for example ldquoZeroWalker-1rdquo [3] uses its two legsto assist the aged person walking and moving up and down
stairs along the handrail by stepping onto the feet of therobot [4] However the aforementioned robots generallyneed tremendous effect on expense and time Furthermore itis very difficult to lift an aged person by human force and it isnot very easy to have a large and heavy-weight liftmachine ina normal house
Generally the first step of image processing for segment-ing the target is background subtraction scheme [5]Although the background subtraction scheme works fairlywell in segment foreground data from nonchanging back-ground but it will still allow objects that are paced into theworkspace to be detected as potential objects As a result acolor (or skin) detector is implemented to further filter theforeground data by converting the RGB (red green and blue)form of resultant image into 119884119862119887119862119903 (luminance bluenessand redness) form [5] Additionally object tracking hasbecome an important topic in robotics field [6 7] Some basicfunctions such as real time automation and robustness tononideal situations are required for practical object trackingsystemsThe servo control structure in real-time visual track-ing systems usually belongs to the category of ldquoimage-basedrdquoand ldquodynamic look andmoverdquo [6] Based on image momentsthree different visual predictive control architectures areproposed [7] However the proposed system was verified
2 Mathematical Problems in Engineering
only by simulation results A novel two-level scheme foradaptive active visual servoing of a mobile robot equippedwith a pan camera was presented in [8] The designed activevisual servoing system shows advantages of a satisfactorysolution for the field-of-view problem global high servoingefficiency and free of any complex pose estimation algorithmusually required for visual servoing systems With respectto traditional visual servoing approaches that use geometricvisual features the visual feature used in [9] was the pixelintensity The proposed approach has been tested in termof accuracy and robustness via several experimental condi-tions A visual servoing strategy based on a novel motion-estimation technique [10] was presented for the stabilizationof a nonholonomic mobile robot The practical exponentialstability can be achieved by perturbed linear system theorydespite the lack of depth information
In the paper a stair-climbing robot equipped with an armwill be designed to provide the service of carrying objects upand down stairs or patrolling for security A control boardincluding a digital signal processor (DSP) TMS320F28335will steer the robot based on the outputs of DC bus currentsensor and an inclinometer by fuzzy logic control (FLC)Without background subtraction and complex object track-ing schemes simple algorithms such as the color filtering andlocating center of the detected target are employed in therobot system With the aid of a CMOS camera for vision therobot arm will track capture and put back the target objectThe field programmable gate array (FPGA) on DE2-70 boardwill implement the image processing
The paper is organized as follows for further discussionSection 2 describes the design steps of the proposed robotrobot mechanism describing each component and the waysof climbing up and going down stairs DSP-based controllerproviding all control signals and realizing fuzzy control logicand the FPGA-based visual servo for tracking and capturingobjects Section 3 presents the experimental results of stairmotion and visual servoing Finally Section 4 claims ourconclusions
2 Robot Design
There are three steps for the proposed robot design mecha-nism DSP-based controller and FPGA-based visual servo
Step I Mechanism Design It is well known that the mosteffective style of movement of a robot on a plane field is thewheel type As obstacles and stairs exist crawler-type and leg-type robots become better candidates for application How-ever the proposed robot is equipped with roller chains whichare attached with polyurethane rubber blocks to generatefriction with ground and stairs for climbing up and downThe stair-climbing robot consists of a main body for movinga front arm and a rear arm for moving up and down stairsThe main body is equipped with two brushless DC motors(BLDCMs) and their drives for locomotion worm gears fortorque amplification two dc motors to control two arms andDSP-based board as control center shown in Figure 1 [11]Thechassic size of themain body is 585 cm times 53 cm and each armis 48 cm times 40 cm such that the maximum length of the robot
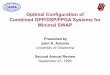
Figure 1 Picture of the stair-climbing robot
Figure 2 Total travel of climbing-up motion
will be 1545 cm The robot is equipped with roller chainsattached with rubber blocks used to generate friction withground and stairs for moving There are 136 rubber blockswith size of 3 cm times 2 cm times 1 cm attached to the roller chains40 for each arm and 56 for main body The distance betweenany two plastic blocks is properly arranged to fix the stairbrink The moving direction of the robot is steered based onthe speed difference of two BLDCMs and the informationfrom ultrasonic sensorsThe robotmakes use of friction forcebetween the roller chainsrubber blocks and stairsground toclimb up The front arm will be pushed down to flat top sothat the main body is lifted The front arm will be pulled upfor next stair-climbing The rear arm is kept flat during therobot going up Figure 2 displays total travel of climbing-upmotion Similarly Figure 3 shows summary of going-downmotion
Step II DSP-Based Controller Design DSP provides the pulse-width modulation (PWM) signals of BLDCMs and DCmotors and realizes the fuzzy logic rules for speed control
The 119894th fuzzy rule in the fuzzy rule-base system isdescribed as [12]
119877119894 If 1199091 is 119860 1198941 and 1199092 is 119860 1198942 then 119910 is 119908119894 (1)
where 119908119894 119909119895 and 119860 119894119895 119895 = 1 2 119894 = 1 2 119899 are fuzzyoutput variables input fuzzy variables and linguistic vari-ables respectively Referring to Figure 4 for 119894th membershipfunction with isosceles triangle shape 119887119894119895 means the length of
Mathematical Problems in Engineering 3
Figure 3 Summary of going-down motion
xj
xjaij
bij
10
0
Aij(xj)
Figure 4 119894th membership function with isosceles triangle shape
the base and 119886119894119895 stands for the abscissa of the center of thebase The membership grade of input 119909119895 is calculated by
119860 119894119895 (119909119895) = 1 minus
2 sdot10038161003816100381610038161003816119909119895 minus 119886119894119895
10038161003816100381610038161003816
119887119894119895
119895 = 1 2 (2)
The bases of triangular membership function keep samefor easily programming By product operation the member-ship grade of the antecedent proposition is calculated as
120583119894 = 119860 1198941 (1199091) sdot 119860 1198942 (1199092) (3)
Then the output will be
119910 =sum119899
119894=1120583119894119908119894
sum119899
119894=1120583119894
(4)
Summarily Table 1 lists the linguistic control rules andFigure 5 displays the design scheme of fuzzy logic control
Step III FPGA-Based Visual Servo Design The graspingmultilink arm consists of three couples of gears three DCmotors four links and one clamper Referring to Figure 6the first DC motor steers the diving gear 1198781 and driven gear1198782 to determine the rotating angleThe secondmotor controlsthe gears of 1198783 1198784119889 1198784119906 and 1198785 together with belts to stretchthe length of the arm 1198784119889 and 1198784119906 are mounted in the same
Table 1 Linguistic control rule table
120579119898
IZO PS PM PB
NB ZO PS PM PBNM ZO PM PM PMNS ZO PB PS ZOZO ZO PB PS ZOPS ZO PB PS ZOPM ZO PS PM PMPB ZO PS PM PB
shaft and with the same number of gears Then the length119883can be calculated as
119883 = cos 120579 times 119897 times 2 (5)
where 119897 is the length of the link The third motor decides theopen angle of the clamper
The pixel array of CMOS camera THDB-D5Mused in therobot consists of a matrix of 2752 times 2004 pixels addressed bycolumn and row [13 14] The 2592 times 1944 array in the centercalled active region represents the default output image sur-rounded by an active boundary region and a border of darkpixels Pixels of active region are output in a Bayer patternformat consisting of four ldquocolorsrdquo green1 green2 red andblue (G1 G2 R and B) to represent three filter colors [12 13]The first row output alternates between G1 and R pixels andthe second row output alternates between B and G2 pixelsThe green1 and green2 pixels have the same color filter butthey are treated as separate colors by the data path and analogsignal chain
In order to calculate the R G and B intensity of eachpixel we relabel the Bayer pattern by the correspondingcolumn-row address shown in Figure 7 After analyzing wesummarize each expression of the color intensity for eachpixel as follows
(i) 119909 is even and 119910 is even
119877(119909119910) =
119877(119909minus1119910) + 119877(119909+1119910)
Pixel Count
Pixel Count = 2 (119909 minus 1) gt 10 (119909 + 1) lt 2681
1 others
119861(119909119910) =
119861(119909119910minus1) + 119861(119909119910+1)
Pixel Count
Pixel Count = 2 (119910 minus 1) gt 50 (119910 + 1) lt 2002
1 others
(6)
4 Mathematical Problems in Engineering
Input of IuI
1
0 2 4 6A
A1
A1
A2
A2
A3
A3
A4
A4
Ii
120579mI
B1B1
B2B2
B3B3
B4B4
B5B5
B6B6
B7
B7
C11
C12
C13
C14
C15
C16
C17
C21
C22
C23
C24
C25
C26
C27
C31
C32
C33
C34
C35
C36
C37
C41
C42
C43
C44
C45
C46
C47
Inpu
t of120579
m
u120579 m
minus6minus4minus2
02
46
V Rule table
Fuzzy inference and output
and 120579m is B4 then uf is C24Rule 2 if I is A2Rule 1 if I is A2
and 120579m is B5 then uf is C25Rule 3 if I is A3 and 120579m is B4 then uf is C34Rule 4 if I is A3 and 120579m is B5 then uf is C35
Defuzzification
W24 = minuI(A2) u 120579m(B4)
W25 = minuI(A2) u 120579m(B5)
W34 = minuI(A3) u 120579m(B4)
W35 = minuI(A3) u 120579m(B5)
uf =C24lowastW24 + C25lowastW25 + C34lowastW34 + C35lowastW35
W24 + W25 + W34 + W35
Figure 5 Design scheme of fuzzy logic control
S2
S3 S5
S1
S4dS4u
120579
120579
l
l l
l
X
Figure 6 Parameter definitions of the grasping arm
(ii) 119909 is even and 119910 is odd
119866(119909119910) =
119866(119909minus1119910) + 119866(119909+1119910) + 119866(119909119910minus1) + 119866(119909119910+1)
Pixel Count
Pixel Count =
4 (119909 minus 1) gt 10 (119909 + 1) lt 2618
3 others
119877(119909119910) =
119877(119909+1119910minus1) + 119877(119909minus1119910minus1) + 119877(119909+1119910+1) + 119877(119909minus1119910+1)
Pixel Count
Pixel Count =
4 (119909 minus 1) gt 10 (119909 + 1) lt 2618
2 others(7)
G(1450) R(1350) G(1250)
G(1351) G(1151)
G(1353) G(1153)
G(1050)
G(1452) G(1252) G(1052)
G(1454) G(1254) G(1054)
R(1150)
R(1352) R(1152)
R(1354) R(1154)
B(1451)
B(1453)
B(1251)
B(1253)
B(1051)
B(1053)
Figure 7 Bayer pattern by the corresponding column-row address
(iii) 119909 is odd and 119910 is even
119866(119909119910) =
119866(119909119910minus1) + 119866(119909119910+1) + 119866(119909minus1119910) + 119866(119909+1119910)
Pixel Count
Pixel Count =
4 (119910 minus 1) gt 50 (119910 + 1) lt 2002
3 others
119861(119909119910) =
119861(119909minus1119910minus1) + 119861(119909+1119910minus1) + 119861(119909+1119910+1) + 119861(119909minus1119910+1)
Pixel Count
Pixel Count =
4 (119910 minus 1) gt 50 (119910 + 1) lt 2002
2 others(8)
Mathematical Problems in Engineering 5
(a) (b)
Figure 8 Realized motion of (a) climbing up and (b) going down by wired control
(a) (b) (c)
Figure 9 Realized motion of climbing up by FLC
(a) (b) (c)
Figure 10 Realized motion of going down by FLC
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
(g) (h)
(i) (j)
Figure 11 Continued
Mathematical Problems in Engineering 7
(k) (l)
(m) (n)
(o) (p)
Figure 11 The taped pictures of the experimental results on grasping
(iv) 119909 is odd and 119910 is odd
119877(119909119910) =
119877(119909119910minus1) + 119877(119909119910+1)
2
119861(119909119910) =
119861(119909minus1119910) + 119861(119909+1119910)
2
(9)
where 119909 and 119910 stand for the column address and row addressrespectively
The image raw data is sent from D5M to DE2-70 boardwhere the FPGA on DE2-70 board will handle image pro-cessing and convert the data to RGB format to display on theVGA display [15ndash17] As a result we first capture the imageof experiment background to find the ranges of colors ofRGB and then define their location regions for color discrim-ination In order to reduce the effect of light variation theimage in RGB space will be converted into 119884119862119887119862119903 space [5]In addition the ranges of RGB fromD5Mare four times of the
general image So those the transformation can be expressedas
[
[
119884
119862119887
119862119903
]
]
= [
[
0299 0587 0114
minus01687 minus033126 05
05 minus041869 minus008131
]
]
[
[
119877
119866
119861
]
]
+[[
[
64
512
512
]]
]
(10)
3 Experiment Results
Gear ratio used in the 45 kg stair-climbing robot is 1320 andthe rated dc input power and speed of the 200-W BLDCMare 24V and 9600 rpm A preliminary experiment that theunloaded robot climbs up and goes down a gradual stair withthe rise of 120mm and depth of 400mm by wired control istestedThe results of every motion are shown in Figure 8 [11]It qualifies the designed robot Then we conduct the secondexperiment that the robot with loading of one arm moves upand down a steeper stair with the rise of 175mm and depth
8 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
Figure 12 Realized motion of climbing up at full loading
of 280mm The taped pictures of the experiment and everymotion are shown in Figures 9 and 10 respectively [12]
The third experiment contains image processing andgrasping armmotion In order to prevent target damagewhileclamping one pressure sensor is installed inside the clamperThe pressure output after calibrating is sent to DSP for refer-ence Figure 11 displays the sequentially taped pictures fromvideos of tracking capturing the cola can and putting it backby the robot arm Figure 11(a) presents the initial status ofthe experiment The arm tracks the corresponding directionafter the can is shifted left shown in Figures 11(b) and 11(c)Figures 11(d) and 11(e) depict the right tracking The armtracks the can back to central position shown in Figures 11(f)and 11(g) Then the robot stretches out the arm for capturingthe can and then draws the arm back presented in Figures
11(h)ndash11(l) Finally the robot puts the can back and goes backto the initial status presented in Figures 11(m)ndash11(p)
Finally we conduct the fourth experiment that the robotwith all loading moves up a stair with the rise of 150mm anddepth of 300mm The taped pictures of the experiment areshown in Figure 12 The climbing-up motion presents vari-ation in proceeding direction This is due to the plastic bellbeing almost torn into broken after long time of experimentaltest But it was not found
4 Conclusion
In the paper we have developed a stair-climbing robot andcompleted experiments of moving updown stairs and objecttracking capturing and loading In fact the stair-climbing
Mathematical Problems in Engineering 9
robot can provide service for the elders by capturing thespecific object at one floor and then climbing up or down toanother floor In addition the robot will patrol for securityby the CCD camera around the house while more imageprocessing functions are provided
Acknowledgments
The authors would like to express their appreciation toMinistry of Education and National Science Council Chinaunder Contract no NSC 100-2632-E-218-001-MY3 for finan-cial supporting
References
[1] K Harada H Hirukawa F Kanehiro et al ldquoDynamical balanceof a humanoid robot grasping an environmentrdquo in Proceedingsof the IEEERSJ International Conference on Intelligent Robotsand Systems pp 1167ndash1173 Sendai Japan October 2004
[2] Y Sugahara A Ohta K Hashimoto et al ldquoWalking up anddown stairs carrying a human by a biped locomotor with paral-lel mechanismrdquo in Proceedings of the IEEE IRSRSJ InternationalConference on Intelligent Robots and Systems pp 1489ndash1494Alberta Canada August 2005
[3] Y Konuma and S Hirose ldquoDevelopment of the stair-climbingbiped robot lsquoZero Walker-1rsquordquo in Proceedings of the 19th AnnualConference of the Robotics Society of Japan pp 851ndash852 2001
[4] Y Takahashi H Nakayama T Nagasawa et al ldquoRoboticassistance for aged peoplerdquo in Proceedings of the 37th SICEAnnual Conference pp 853ndash858 Chiba Japan July 1998
[5] AMalima E Ozgur andM Cetin ldquoA fast algorithm for vision-based hand gesture recognition for robot controlrdquo in Proceed-ings of the 14th IEEE Signal Processing and CommunicationsApplications pp 1ndash4 Antalya Turkey April 2006
[6] S Hutchinson G D Hager and P I Corke ldquoA tutorial on visualservo controlrdquo IEEE Transactions on Robotics and Automationvol 12 no 5 pp 651ndash670 1996
[7] C Copot C Lazar and A Burlacu ldquoPredictive control ofnonlinear visual servoing systems using image momentsrdquo IETControl Theory amp Applications vol 6 no 10 pp 1486ndash14962012
[8] Y Fang X Liu andX Zhang ldquoAdaptive active visual servoing ofnonholonomic mobile robotsrdquo IEEE Transactions on IndustrialElectronics vol 59 no 1 pp 486ndash497 2012
[9] B Tamadazte N L-F Piat and E Marchand ldquoA direct visualservoing scheme for automatic nanopositioningrdquo IEEEASMETransactions on Mechatronics vol 17 no 4 pp 728ndash736 2012
[10] X Zhang Y Fang and X Liu ldquoMotion-estimation-based visualservoing of nonholonomic mobile robotsrdquo IEEE Transactionson Robotics vol 27 no 6 pp 1167ndash1175 2011
[11] M-S Wang and Y-M Tu ldquoDesign and implementation of astair-climbing robotrdquo in Proceedings of the IEEE InternationalConference on Advanced Robotics and Its Social Impacts TaipeiTaiwan August 2008
[12] M-S Wang Y-S Kung and Y-M Tu ldquoFuzzy logic controldesign for a Stair-climbing robotrdquo International Journal of FuzzySystems vol 11 no 3 pp 174ndash182 2009
[13] Terasic Company THDB-D5M Hardware Specification 2008[14] Terasic Company TRDB-D5M User Guide 2008
[15] AK Benkhalil S S Sipson andWBooth ldquoReal-timedetectionand tracking of amoving object using a complex programmablelogic devicerdquo in Proceedings of the IEE Colloquium on TargetTracking and Data Fusion pp 1ndash7 Birmingham UK June 1998
[16] T Hamamoto S Nagao and K Aizawa ldquoReal-time objectstracking by using smart image sensor and FPGArdquo inProceedingsof the International Conference on Image Processing (ICIP rsquo02)pp III441ndashIII444 New York NY USA September 2002
[17] S-B Park A Teuner and B J Hosticka ldquoA motion detectionsystem based on a CMOS photo sensor arrayrdquo in Proceedingsof the International Conference on Image Processing vol 3 pp967ndash971 Chicago Ill USA October 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
only by simulation results A novel two-level scheme foradaptive active visual servoing of a mobile robot equippedwith a pan camera was presented in [8] The designed activevisual servoing system shows advantages of a satisfactorysolution for the field-of-view problem global high servoingefficiency and free of any complex pose estimation algorithmusually required for visual servoing systems With respectto traditional visual servoing approaches that use geometricvisual features the visual feature used in [9] was the pixelintensity The proposed approach has been tested in termof accuracy and robustness via several experimental condi-tions A visual servoing strategy based on a novel motion-estimation technique [10] was presented for the stabilizationof a nonholonomic mobile robot The practical exponentialstability can be achieved by perturbed linear system theorydespite the lack of depth information
In the paper a stair-climbing robot equipped with an armwill be designed to provide the service of carrying objects upand down stairs or patrolling for security A control boardincluding a digital signal processor (DSP) TMS320F28335will steer the robot based on the outputs of DC bus currentsensor and an inclinometer by fuzzy logic control (FLC)Without background subtraction and complex object track-ing schemes simple algorithms such as the color filtering andlocating center of the detected target are employed in therobot system With the aid of a CMOS camera for vision therobot arm will track capture and put back the target objectThe field programmable gate array (FPGA) on DE2-70 boardwill implement the image processing
The paper is organized as follows for further discussionSection 2 describes the design steps of the proposed robotrobot mechanism describing each component and the waysof climbing up and going down stairs DSP-based controllerproviding all control signals and realizing fuzzy control logicand the FPGA-based visual servo for tracking and capturingobjects Section 3 presents the experimental results of stairmotion and visual servoing Finally Section 4 claims ourconclusions
2 Robot Design
There are three steps for the proposed robot design mecha-nism DSP-based controller and FPGA-based visual servo
Step I Mechanism Design It is well known that the mosteffective style of movement of a robot on a plane field is thewheel type As obstacles and stairs exist crawler-type and leg-type robots become better candidates for application How-ever the proposed robot is equipped with roller chains whichare attached with polyurethane rubber blocks to generatefriction with ground and stairs for climbing up and downThe stair-climbing robot consists of a main body for movinga front arm and a rear arm for moving up and down stairsThe main body is equipped with two brushless DC motors(BLDCMs) and their drives for locomotion worm gears fortorque amplification two dc motors to control two arms andDSP-based board as control center shown in Figure 1 [11]Thechassic size of themain body is 585 cm times 53 cm and each armis 48 cm times 40 cm such that the maximum length of the robot
Figure 1 Picture of the stair-climbing robot
Figure 2 Total travel of climbing-up motion
will be 1545 cm The robot is equipped with roller chainsattached with rubber blocks used to generate friction withground and stairs for moving There are 136 rubber blockswith size of 3 cm times 2 cm times 1 cm attached to the roller chains40 for each arm and 56 for main body The distance betweenany two plastic blocks is properly arranged to fix the stairbrink The moving direction of the robot is steered based onthe speed difference of two BLDCMs and the informationfrom ultrasonic sensorsThe robotmakes use of friction forcebetween the roller chainsrubber blocks and stairsground toclimb up The front arm will be pushed down to flat top sothat the main body is lifted The front arm will be pulled upfor next stair-climbing The rear arm is kept flat during therobot going up Figure 2 displays total travel of climbing-upmotion Similarly Figure 3 shows summary of going-downmotion
Step II DSP-Based Controller Design DSP provides the pulse-width modulation (PWM) signals of BLDCMs and DCmotors and realizes the fuzzy logic rules for speed control
The 119894th fuzzy rule in the fuzzy rule-base system isdescribed as [12]
119877119894 If 1199091 is 119860 1198941 and 1199092 is 119860 1198942 then 119910 is 119908119894 (1)
where 119908119894 119909119895 and 119860 119894119895 119895 = 1 2 119894 = 1 2 119899 are fuzzyoutput variables input fuzzy variables and linguistic vari-ables respectively Referring to Figure 4 for 119894th membershipfunction with isosceles triangle shape 119887119894119895 means the length of
Mathematical Problems in Engineering 3
Figure 3 Summary of going-down motion
xj
xjaij
bij
10
0
Aij(xj)
Figure 4 119894th membership function with isosceles triangle shape
the base and 119886119894119895 stands for the abscissa of the center of thebase The membership grade of input 119909119895 is calculated by
119860 119894119895 (119909119895) = 1 minus
2 sdot10038161003816100381610038161003816119909119895 minus 119886119894119895
10038161003816100381610038161003816
119887119894119895
119895 = 1 2 (2)
The bases of triangular membership function keep samefor easily programming By product operation the member-ship grade of the antecedent proposition is calculated as
120583119894 = 119860 1198941 (1199091) sdot 119860 1198942 (1199092) (3)
Then the output will be
119910 =sum119899
119894=1120583119894119908119894
sum119899
119894=1120583119894
(4)
Summarily Table 1 lists the linguistic control rules andFigure 5 displays the design scheme of fuzzy logic control
Step III FPGA-Based Visual Servo Design The graspingmultilink arm consists of three couples of gears three DCmotors four links and one clamper Referring to Figure 6the first DC motor steers the diving gear 1198781 and driven gear1198782 to determine the rotating angleThe secondmotor controlsthe gears of 1198783 1198784119889 1198784119906 and 1198785 together with belts to stretchthe length of the arm 1198784119889 and 1198784119906 are mounted in the same
Table 1 Linguistic control rule table
120579119898
IZO PS PM PB
NB ZO PS PM PBNM ZO PM PM PMNS ZO PB PS ZOZO ZO PB PS ZOPS ZO PB PS ZOPM ZO PS PM PMPB ZO PS PM PB
shaft and with the same number of gears Then the length119883can be calculated as
119883 = cos 120579 times 119897 times 2 (5)
where 119897 is the length of the link The third motor decides theopen angle of the clamper
The pixel array of CMOS camera THDB-D5Mused in therobot consists of a matrix of 2752 times 2004 pixels addressed bycolumn and row [13 14] The 2592 times 1944 array in the centercalled active region represents the default output image sur-rounded by an active boundary region and a border of darkpixels Pixels of active region are output in a Bayer patternformat consisting of four ldquocolorsrdquo green1 green2 red andblue (G1 G2 R and B) to represent three filter colors [12 13]The first row output alternates between G1 and R pixels andthe second row output alternates between B and G2 pixelsThe green1 and green2 pixels have the same color filter butthey are treated as separate colors by the data path and analogsignal chain
In order to calculate the R G and B intensity of eachpixel we relabel the Bayer pattern by the correspondingcolumn-row address shown in Figure 7 After analyzing wesummarize each expression of the color intensity for eachpixel as follows
(i) 119909 is even and 119910 is even
119877(119909119910) =
119877(119909minus1119910) + 119877(119909+1119910)
Pixel Count
Pixel Count = 2 (119909 minus 1) gt 10 (119909 + 1) lt 2681
1 others
119861(119909119910) =
119861(119909119910minus1) + 119861(119909119910+1)
Pixel Count
Pixel Count = 2 (119910 minus 1) gt 50 (119910 + 1) lt 2002
1 others
(6)
4 Mathematical Problems in Engineering
Input of IuI
1
0 2 4 6A
A1
A1
A2
A2
A3
A3
A4
A4
Ii
120579mI
B1B1
B2B2
B3B3
B4B4
B5B5
B6B6
B7
B7
C11
C12
C13
C14
C15
C16
C17
C21
C22
C23
C24
C25
C26
C27
C31
C32
C33
C34
C35
C36
C37
C41
C42
C43
C44
C45
C46
C47
Inpu
t of120579
m
u120579 m
minus6minus4minus2
02
46
V Rule table
Fuzzy inference and output
and 120579m is B4 then uf is C24Rule 2 if I is A2Rule 1 if I is A2
and 120579m is B5 then uf is C25Rule 3 if I is A3 and 120579m is B4 then uf is C34Rule 4 if I is A3 and 120579m is B5 then uf is C35
Defuzzification
W24 = minuI(A2) u 120579m(B4)
W25 = minuI(A2) u 120579m(B5)
W34 = minuI(A3) u 120579m(B4)
W35 = minuI(A3) u 120579m(B5)
uf =C24lowastW24 + C25lowastW25 + C34lowastW34 + C35lowastW35
W24 + W25 + W34 + W35
Figure 5 Design scheme of fuzzy logic control
S2
S3 S5
S1
S4dS4u
120579
120579
l
l l
l
X
Figure 6 Parameter definitions of the grasping arm
(ii) 119909 is even and 119910 is odd
119866(119909119910) =
119866(119909minus1119910) + 119866(119909+1119910) + 119866(119909119910minus1) + 119866(119909119910+1)
Pixel Count
Pixel Count =
4 (119909 minus 1) gt 10 (119909 + 1) lt 2618
3 others
119877(119909119910) =
119877(119909+1119910minus1) + 119877(119909minus1119910minus1) + 119877(119909+1119910+1) + 119877(119909minus1119910+1)
Pixel Count
Pixel Count =
4 (119909 minus 1) gt 10 (119909 + 1) lt 2618
2 others(7)
G(1450) R(1350) G(1250)
G(1351) G(1151)
G(1353) G(1153)
G(1050)
G(1452) G(1252) G(1052)
G(1454) G(1254) G(1054)
R(1150)
R(1352) R(1152)
R(1354) R(1154)
B(1451)
B(1453)
B(1251)
B(1253)
B(1051)
B(1053)
Figure 7 Bayer pattern by the corresponding column-row address
(iii) 119909 is odd and 119910 is even
119866(119909119910) =
119866(119909119910minus1) + 119866(119909119910+1) + 119866(119909minus1119910) + 119866(119909+1119910)
Pixel Count
Pixel Count =
4 (119910 minus 1) gt 50 (119910 + 1) lt 2002
3 others
119861(119909119910) =
119861(119909minus1119910minus1) + 119861(119909+1119910minus1) + 119861(119909+1119910+1) + 119861(119909minus1119910+1)
Pixel Count
Pixel Count =
4 (119910 minus 1) gt 50 (119910 + 1) lt 2002
2 others(8)
Mathematical Problems in Engineering 5
(a) (b)
Figure 8 Realized motion of (a) climbing up and (b) going down by wired control
(a) (b) (c)
Figure 9 Realized motion of climbing up by FLC
(a) (b) (c)
Figure 10 Realized motion of going down by FLC
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
(g) (h)
(i) (j)
Figure 11 Continued
Mathematical Problems in Engineering 7
(k) (l)
(m) (n)
(o) (p)
Figure 11 The taped pictures of the experimental results on grasping
(iv) 119909 is odd and 119910 is odd
119877(119909119910) =
119877(119909119910minus1) + 119877(119909119910+1)
2
119861(119909119910) =
119861(119909minus1119910) + 119861(119909+1119910)
2
(9)
where 119909 and 119910 stand for the column address and row addressrespectively
The image raw data is sent from D5M to DE2-70 boardwhere the FPGA on DE2-70 board will handle image pro-cessing and convert the data to RGB format to display on theVGA display [15ndash17] As a result we first capture the imageof experiment background to find the ranges of colors ofRGB and then define their location regions for color discrim-ination In order to reduce the effect of light variation theimage in RGB space will be converted into 119884119862119887119862119903 space [5]In addition the ranges of RGB fromD5Mare four times of the
general image So those the transformation can be expressedas
[
[
119884
119862119887
119862119903
]
]
= [
[
0299 0587 0114
minus01687 minus033126 05
05 minus041869 minus008131
]
]
[
[
119877
119866
119861
]
]
+[[
[
64
512
512
]]
]
(10)
3 Experiment Results
Gear ratio used in the 45 kg stair-climbing robot is 1320 andthe rated dc input power and speed of the 200-W BLDCMare 24V and 9600 rpm A preliminary experiment that theunloaded robot climbs up and goes down a gradual stair withthe rise of 120mm and depth of 400mm by wired control istestedThe results of every motion are shown in Figure 8 [11]It qualifies the designed robot Then we conduct the secondexperiment that the robot with loading of one arm moves upand down a steeper stair with the rise of 175mm and depth
8 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
Figure 12 Realized motion of climbing up at full loading
of 280mm The taped pictures of the experiment and everymotion are shown in Figures 9 and 10 respectively [12]
The third experiment contains image processing andgrasping armmotion In order to prevent target damagewhileclamping one pressure sensor is installed inside the clamperThe pressure output after calibrating is sent to DSP for refer-ence Figure 11 displays the sequentially taped pictures fromvideos of tracking capturing the cola can and putting it backby the robot arm Figure 11(a) presents the initial status ofthe experiment The arm tracks the corresponding directionafter the can is shifted left shown in Figures 11(b) and 11(c)Figures 11(d) and 11(e) depict the right tracking The armtracks the can back to central position shown in Figures 11(f)and 11(g) Then the robot stretches out the arm for capturingthe can and then draws the arm back presented in Figures
11(h)ndash11(l) Finally the robot puts the can back and goes backto the initial status presented in Figures 11(m)ndash11(p)
Finally we conduct the fourth experiment that the robotwith all loading moves up a stair with the rise of 150mm anddepth of 300mm The taped pictures of the experiment areshown in Figure 12 The climbing-up motion presents vari-ation in proceeding direction This is due to the plastic bellbeing almost torn into broken after long time of experimentaltest But it was not found
4 Conclusion
In the paper we have developed a stair-climbing robot andcompleted experiments of moving updown stairs and objecttracking capturing and loading In fact the stair-climbing
Mathematical Problems in Engineering 9
robot can provide service for the elders by capturing thespecific object at one floor and then climbing up or down toanother floor In addition the robot will patrol for securityby the CCD camera around the house while more imageprocessing functions are provided
Acknowledgments
The authors would like to express their appreciation toMinistry of Education and National Science Council Chinaunder Contract no NSC 100-2632-E-218-001-MY3 for finan-cial supporting
References
[1] K Harada H Hirukawa F Kanehiro et al ldquoDynamical balanceof a humanoid robot grasping an environmentrdquo in Proceedingsof the IEEERSJ International Conference on Intelligent Robotsand Systems pp 1167ndash1173 Sendai Japan October 2004
[2] Y Sugahara A Ohta K Hashimoto et al ldquoWalking up anddown stairs carrying a human by a biped locomotor with paral-lel mechanismrdquo in Proceedings of the IEEE IRSRSJ InternationalConference on Intelligent Robots and Systems pp 1489ndash1494Alberta Canada August 2005
[3] Y Konuma and S Hirose ldquoDevelopment of the stair-climbingbiped robot lsquoZero Walker-1rsquordquo in Proceedings of the 19th AnnualConference of the Robotics Society of Japan pp 851ndash852 2001
[4] Y Takahashi H Nakayama T Nagasawa et al ldquoRoboticassistance for aged peoplerdquo in Proceedings of the 37th SICEAnnual Conference pp 853ndash858 Chiba Japan July 1998
[5] AMalima E Ozgur andM Cetin ldquoA fast algorithm for vision-based hand gesture recognition for robot controlrdquo in Proceed-ings of the 14th IEEE Signal Processing and CommunicationsApplications pp 1ndash4 Antalya Turkey April 2006
[6] S Hutchinson G D Hager and P I Corke ldquoA tutorial on visualservo controlrdquo IEEE Transactions on Robotics and Automationvol 12 no 5 pp 651ndash670 1996
[7] C Copot C Lazar and A Burlacu ldquoPredictive control ofnonlinear visual servoing systems using image momentsrdquo IETControl Theory amp Applications vol 6 no 10 pp 1486ndash14962012
[8] Y Fang X Liu andX Zhang ldquoAdaptive active visual servoing ofnonholonomic mobile robotsrdquo IEEE Transactions on IndustrialElectronics vol 59 no 1 pp 486ndash497 2012
[9] B Tamadazte N L-F Piat and E Marchand ldquoA direct visualservoing scheme for automatic nanopositioningrdquo IEEEASMETransactions on Mechatronics vol 17 no 4 pp 728ndash736 2012
[10] X Zhang Y Fang and X Liu ldquoMotion-estimation-based visualservoing of nonholonomic mobile robotsrdquo IEEE Transactionson Robotics vol 27 no 6 pp 1167ndash1175 2011
[11] M-S Wang and Y-M Tu ldquoDesign and implementation of astair-climbing robotrdquo in Proceedings of the IEEE InternationalConference on Advanced Robotics and Its Social Impacts TaipeiTaiwan August 2008
[12] M-S Wang Y-S Kung and Y-M Tu ldquoFuzzy logic controldesign for a Stair-climbing robotrdquo International Journal of FuzzySystems vol 11 no 3 pp 174ndash182 2009
[13] Terasic Company THDB-D5M Hardware Specification 2008[14] Terasic Company TRDB-D5M User Guide 2008
[15] AK Benkhalil S S Sipson andWBooth ldquoReal-timedetectionand tracking of amoving object using a complex programmablelogic devicerdquo in Proceedings of the IEE Colloquium on TargetTracking and Data Fusion pp 1ndash7 Birmingham UK June 1998
[16] T Hamamoto S Nagao and K Aizawa ldquoReal-time objectstracking by using smart image sensor and FPGArdquo inProceedingsof the International Conference on Image Processing (ICIP rsquo02)pp III441ndashIII444 New York NY USA September 2002
[17] S-B Park A Teuner and B J Hosticka ldquoA motion detectionsystem based on a CMOS photo sensor arrayrdquo in Proceedingsof the International Conference on Image Processing vol 3 pp967ndash971 Chicago Ill USA October 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Figure 3 Summary of going-down motion
xj
xjaij
bij
10
0
Aij(xj)
Figure 4 119894th membership function with isosceles triangle shape
the base and 119886119894119895 stands for the abscissa of the center of thebase The membership grade of input 119909119895 is calculated by
119860 119894119895 (119909119895) = 1 minus
2 sdot10038161003816100381610038161003816119909119895 minus 119886119894119895
10038161003816100381610038161003816
119887119894119895
119895 = 1 2 (2)
The bases of triangular membership function keep samefor easily programming By product operation the member-ship grade of the antecedent proposition is calculated as
120583119894 = 119860 1198941 (1199091) sdot 119860 1198942 (1199092) (3)
Then the output will be
119910 =sum119899
119894=1120583119894119908119894
sum119899
119894=1120583119894
(4)
Summarily Table 1 lists the linguistic control rules andFigure 5 displays the design scheme of fuzzy logic control
Step III FPGA-Based Visual Servo Design The graspingmultilink arm consists of three couples of gears three DCmotors four links and one clamper Referring to Figure 6the first DC motor steers the diving gear 1198781 and driven gear1198782 to determine the rotating angleThe secondmotor controlsthe gears of 1198783 1198784119889 1198784119906 and 1198785 together with belts to stretchthe length of the arm 1198784119889 and 1198784119906 are mounted in the same
Table 1 Linguistic control rule table
120579119898
IZO PS PM PB
NB ZO PS PM PBNM ZO PM PM PMNS ZO PB PS ZOZO ZO PB PS ZOPS ZO PB PS ZOPM ZO PS PM PMPB ZO PS PM PB
shaft and with the same number of gears Then the length119883can be calculated as
119883 = cos 120579 times 119897 times 2 (5)
where 119897 is the length of the link The third motor decides theopen angle of the clamper
The pixel array of CMOS camera THDB-D5Mused in therobot consists of a matrix of 2752 times 2004 pixels addressed bycolumn and row [13 14] The 2592 times 1944 array in the centercalled active region represents the default output image sur-rounded by an active boundary region and a border of darkpixels Pixels of active region are output in a Bayer patternformat consisting of four ldquocolorsrdquo green1 green2 red andblue (G1 G2 R and B) to represent three filter colors [12 13]The first row output alternates between G1 and R pixels andthe second row output alternates between B and G2 pixelsThe green1 and green2 pixels have the same color filter butthey are treated as separate colors by the data path and analogsignal chain
In order to calculate the R G and B intensity of eachpixel we relabel the Bayer pattern by the correspondingcolumn-row address shown in Figure 7 After analyzing wesummarize each expression of the color intensity for eachpixel as follows
(i) 119909 is even and 119910 is even
119877(119909119910) =
119877(119909minus1119910) + 119877(119909+1119910)
Pixel Count
Pixel Count = 2 (119909 minus 1) gt 10 (119909 + 1) lt 2681
1 others
119861(119909119910) =
119861(119909119910minus1) + 119861(119909119910+1)
Pixel Count
Pixel Count = 2 (119910 minus 1) gt 50 (119910 + 1) lt 2002
1 others
(6)
4 Mathematical Problems in Engineering
Input of IuI
1
0 2 4 6A
A1
A1
A2
A2
A3
A3
A4
A4
Ii
120579mI
B1B1
B2B2
B3B3
B4B4
B5B5
B6B6
B7
B7
C11
C12
C13
C14
C15
C16
C17
C21
C22
C23
C24
C25
C26
C27
C31
C32
C33
C34
C35
C36
C37
C41
C42
C43
C44
C45
C46
C47
Inpu
t of120579
m
u120579 m
minus6minus4minus2
02
46
V Rule table
Fuzzy inference and output
and 120579m is B4 then uf is C24Rule 2 if I is A2Rule 1 if I is A2
and 120579m is B5 then uf is C25Rule 3 if I is A3 and 120579m is B4 then uf is C34Rule 4 if I is A3 and 120579m is B5 then uf is C35
Defuzzification
W24 = minuI(A2) u 120579m(B4)
W25 = minuI(A2) u 120579m(B5)
W34 = minuI(A3) u 120579m(B4)
W35 = minuI(A3) u 120579m(B5)
uf =C24lowastW24 + C25lowastW25 + C34lowastW34 + C35lowastW35
W24 + W25 + W34 + W35
Figure 5 Design scheme of fuzzy logic control
S2
S3 S5
S1
S4dS4u
120579
120579
l
l l
l
X
Figure 6 Parameter definitions of the grasping arm
(ii) 119909 is even and 119910 is odd
119866(119909119910) =
119866(119909minus1119910) + 119866(119909+1119910) + 119866(119909119910minus1) + 119866(119909119910+1)
Pixel Count
Pixel Count =
4 (119909 minus 1) gt 10 (119909 + 1) lt 2618
3 others
119877(119909119910) =
119877(119909+1119910minus1) + 119877(119909minus1119910minus1) + 119877(119909+1119910+1) + 119877(119909minus1119910+1)
Pixel Count
Pixel Count =
4 (119909 minus 1) gt 10 (119909 + 1) lt 2618
2 others(7)
G(1450) R(1350) G(1250)
G(1351) G(1151)
G(1353) G(1153)
G(1050)
G(1452) G(1252) G(1052)
G(1454) G(1254) G(1054)
R(1150)
R(1352) R(1152)
R(1354) R(1154)
B(1451)
B(1453)
B(1251)
B(1253)
B(1051)
B(1053)
Figure 7 Bayer pattern by the corresponding column-row address
(iii) 119909 is odd and 119910 is even
119866(119909119910) =
119866(119909119910minus1) + 119866(119909119910+1) + 119866(119909minus1119910) + 119866(119909+1119910)
Pixel Count
Pixel Count =
4 (119910 minus 1) gt 50 (119910 + 1) lt 2002
3 others
119861(119909119910) =
119861(119909minus1119910minus1) + 119861(119909+1119910minus1) + 119861(119909+1119910+1) + 119861(119909minus1119910+1)
Pixel Count
Pixel Count =
4 (119910 minus 1) gt 50 (119910 + 1) lt 2002
2 others(8)
Mathematical Problems in Engineering 5
(a) (b)
Figure 8 Realized motion of (a) climbing up and (b) going down by wired control
(a) (b) (c)
Figure 9 Realized motion of climbing up by FLC
(a) (b) (c)
Figure 10 Realized motion of going down by FLC
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
(g) (h)
(i) (j)
Figure 11 Continued
Mathematical Problems in Engineering 7
(k) (l)
(m) (n)
(o) (p)
Figure 11 The taped pictures of the experimental results on grasping
(iv) 119909 is odd and 119910 is odd
119877(119909119910) =
119877(119909119910minus1) + 119877(119909119910+1)
2
119861(119909119910) =
119861(119909minus1119910) + 119861(119909+1119910)
2
(9)
where 119909 and 119910 stand for the column address and row addressrespectively
The image raw data is sent from D5M to DE2-70 boardwhere the FPGA on DE2-70 board will handle image pro-cessing and convert the data to RGB format to display on theVGA display [15ndash17] As a result we first capture the imageof experiment background to find the ranges of colors ofRGB and then define their location regions for color discrim-ination In order to reduce the effect of light variation theimage in RGB space will be converted into 119884119862119887119862119903 space [5]In addition the ranges of RGB fromD5Mare four times of the
general image So those the transformation can be expressedas
[
[
119884
119862119887
119862119903
]
]
= [
[
0299 0587 0114
minus01687 minus033126 05
05 minus041869 minus008131
]
]
[
[
119877
119866
119861
]
]
+[[
[
64
512
512
]]
]
(10)
3 Experiment Results
Gear ratio used in the 45 kg stair-climbing robot is 1320 andthe rated dc input power and speed of the 200-W BLDCMare 24V and 9600 rpm A preliminary experiment that theunloaded robot climbs up and goes down a gradual stair withthe rise of 120mm and depth of 400mm by wired control istestedThe results of every motion are shown in Figure 8 [11]It qualifies the designed robot Then we conduct the secondexperiment that the robot with loading of one arm moves upand down a steeper stair with the rise of 175mm and depth
8 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
Figure 12 Realized motion of climbing up at full loading
of 280mm The taped pictures of the experiment and everymotion are shown in Figures 9 and 10 respectively [12]
The third experiment contains image processing andgrasping armmotion In order to prevent target damagewhileclamping one pressure sensor is installed inside the clamperThe pressure output after calibrating is sent to DSP for refer-ence Figure 11 displays the sequentially taped pictures fromvideos of tracking capturing the cola can and putting it backby the robot arm Figure 11(a) presents the initial status ofthe experiment The arm tracks the corresponding directionafter the can is shifted left shown in Figures 11(b) and 11(c)Figures 11(d) and 11(e) depict the right tracking The armtracks the can back to central position shown in Figures 11(f)and 11(g) Then the robot stretches out the arm for capturingthe can and then draws the arm back presented in Figures
11(h)ndash11(l) Finally the robot puts the can back and goes backto the initial status presented in Figures 11(m)ndash11(p)
Finally we conduct the fourth experiment that the robotwith all loading moves up a stair with the rise of 150mm anddepth of 300mm The taped pictures of the experiment areshown in Figure 12 The climbing-up motion presents vari-ation in proceeding direction This is due to the plastic bellbeing almost torn into broken after long time of experimentaltest But it was not found
4 Conclusion
In the paper we have developed a stair-climbing robot andcompleted experiments of moving updown stairs and objecttracking capturing and loading In fact the stair-climbing
Mathematical Problems in Engineering 9
robot can provide service for the elders by capturing thespecific object at one floor and then climbing up or down toanother floor In addition the robot will patrol for securityby the CCD camera around the house while more imageprocessing functions are provided
Acknowledgments
The authors would like to express their appreciation toMinistry of Education and National Science Council Chinaunder Contract no NSC 100-2632-E-218-001-MY3 for finan-cial supporting
References
[1] K Harada H Hirukawa F Kanehiro et al ldquoDynamical balanceof a humanoid robot grasping an environmentrdquo in Proceedingsof the IEEERSJ International Conference on Intelligent Robotsand Systems pp 1167ndash1173 Sendai Japan October 2004
[2] Y Sugahara A Ohta K Hashimoto et al ldquoWalking up anddown stairs carrying a human by a biped locomotor with paral-lel mechanismrdquo in Proceedings of the IEEE IRSRSJ InternationalConference on Intelligent Robots and Systems pp 1489ndash1494Alberta Canada August 2005
[3] Y Konuma and S Hirose ldquoDevelopment of the stair-climbingbiped robot lsquoZero Walker-1rsquordquo in Proceedings of the 19th AnnualConference of the Robotics Society of Japan pp 851ndash852 2001
[4] Y Takahashi H Nakayama T Nagasawa et al ldquoRoboticassistance for aged peoplerdquo in Proceedings of the 37th SICEAnnual Conference pp 853ndash858 Chiba Japan July 1998
[5] AMalima E Ozgur andM Cetin ldquoA fast algorithm for vision-based hand gesture recognition for robot controlrdquo in Proceed-ings of the 14th IEEE Signal Processing and CommunicationsApplications pp 1ndash4 Antalya Turkey April 2006
[6] S Hutchinson G D Hager and P I Corke ldquoA tutorial on visualservo controlrdquo IEEE Transactions on Robotics and Automationvol 12 no 5 pp 651ndash670 1996
[7] C Copot C Lazar and A Burlacu ldquoPredictive control ofnonlinear visual servoing systems using image momentsrdquo IETControl Theory amp Applications vol 6 no 10 pp 1486ndash14962012
[8] Y Fang X Liu andX Zhang ldquoAdaptive active visual servoing ofnonholonomic mobile robotsrdquo IEEE Transactions on IndustrialElectronics vol 59 no 1 pp 486ndash497 2012
[9] B Tamadazte N L-F Piat and E Marchand ldquoA direct visualservoing scheme for automatic nanopositioningrdquo IEEEASMETransactions on Mechatronics vol 17 no 4 pp 728ndash736 2012
[10] X Zhang Y Fang and X Liu ldquoMotion-estimation-based visualservoing of nonholonomic mobile robotsrdquo IEEE Transactionson Robotics vol 27 no 6 pp 1167ndash1175 2011
[11] M-S Wang and Y-M Tu ldquoDesign and implementation of astair-climbing robotrdquo in Proceedings of the IEEE InternationalConference on Advanced Robotics and Its Social Impacts TaipeiTaiwan August 2008
[12] M-S Wang Y-S Kung and Y-M Tu ldquoFuzzy logic controldesign for a Stair-climbing robotrdquo International Journal of FuzzySystems vol 11 no 3 pp 174ndash182 2009
[13] Terasic Company THDB-D5M Hardware Specification 2008[14] Terasic Company TRDB-D5M User Guide 2008
[15] AK Benkhalil S S Sipson andWBooth ldquoReal-timedetectionand tracking of amoving object using a complex programmablelogic devicerdquo in Proceedings of the IEE Colloquium on TargetTracking and Data Fusion pp 1ndash7 Birmingham UK June 1998
[16] T Hamamoto S Nagao and K Aizawa ldquoReal-time objectstracking by using smart image sensor and FPGArdquo inProceedingsof the International Conference on Image Processing (ICIP rsquo02)pp III441ndashIII444 New York NY USA September 2002
[17] S-B Park A Teuner and B J Hosticka ldquoA motion detectionsystem based on a CMOS photo sensor arrayrdquo in Proceedingsof the International Conference on Image Processing vol 3 pp967ndash971 Chicago Ill USA October 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Input of IuI
1
0 2 4 6A
A1
A1
A2
A2
A3
A3
A4
A4
Ii
120579mI
B1B1
B2B2
B3B3
B4B4
B5B5
B6B6
B7
B7
C11
C12
C13
C14
C15
C16
C17
C21
C22
C23
C24
C25
C26
C27
C31
C32
C33
C34
C35
C36
C37
C41
C42
C43
C44
C45
C46
C47
Inpu
t of120579
m
u120579 m
minus6minus4minus2
02
46
V Rule table
Fuzzy inference and output
and 120579m is B4 then uf is C24Rule 2 if I is A2Rule 1 if I is A2
and 120579m is B5 then uf is C25Rule 3 if I is A3 and 120579m is B4 then uf is C34Rule 4 if I is A3 and 120579m is B5 then uf is C35
Defuzzification
W24 = minuI(A2) u 120579m(B4)
W25 = minuI(A2) u 120579m(B5)
W34 = minuI(A3) u 120579m(B4)
W35 = minuI(A3) u 120579m(B5)
uf =C24lowastW24 + C25lowastW25 + C34lowastW34 + C35lowastW35
W24 + W25 + W34 + W35
Figure 5 Design scheme of fuzzy logic control
S2
S3 S5
S1
S4dS4u
120579
120579
l
l l
l
X
Figure 6 Parameter definitions of the grasping arm
(ii) 119909 is even and 119910 is odd
119866(119909119910) =
119866(119909minus1119910) + 119866(119909+1119910) + 119866(119909119910minus1) + 119866(119909119910+1)
Pixel Count
Pixel Count =
4 (119909 minus 1) gt 10 (119909 + 1) lt 2618
3 others
119877(119909119910) =
119877(119909+1119910minus1) + 119877(119909minus1119910minus1) + 119877(119909+1119910+1) + 119877(119909minus1119910+1)
Pixel Count
Pixel Count =
4 (119909 minus 1) gt 10 (119909 + 1) lt 2618
2 others(7)
G(1450) R(1350) G(1250)
G(1351) G(1151)
G(1353) G(1153)
G(1050)
G(1452) G(1252) G(1052)
G(1454) G(1254) G(1054)
R(1150)
R(1352) R(1152)
R(1354) R(1154)
B(1451)
B(1453)
B(1251)
B(1253)
B(1051)
B(1053)
Figure 7 Bayer pattern by the corresponding column-row address
(iii) 119909 is odd and 119910 is even
119866(119909119910) =
119866(119909119910minus1) + 119866(119909119910+1) + 119866(119909minus1119910) + 119866(119909+1119910)
Pixel Count
Pixel Count =
4 (119910 minus 1) gt 50 (119910 + 1) lt 2002
3 others
119861(119909119910) =
119861(119909minus1119910minus1) + 119861(119909+1119910minus1) + 119861(119909+1119910+1) + 119861(119909minus1119910+1)
Pixel Count
Pixel Count =
4 (119910 minus 1) gt 50 (119910 + 1) lt 2002
2 others(8)
Mathematical Problems in Engineering 5
(a) (b)
Figure 8 Realized motion of (a) climbing up and (b) going down by wired control
(a) (b) (c)
Figure 9 Realized motion of climbing up by FLC
(a) (b) (c)
Figure 10 Realized motion of going down by FLC
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
(g) (h)
(i) (j)
Figure 11 Continued
Mathematical Problems in Engineering 7
(k) (l)
(m) (n)
(o) (p)
Figure 11 The taped pictures of the experimental results on grasping
(iv) 119909 is odd and 119910 is odd
119877(119909119910) =
119877(119909119910minus1) + 119877(119909119910+1)
2
119861(119909119910) =
119861(119909minus1119910) + 119861(119909+1119910)
2
(9)
where 119909 and 119910 stand for the column address and row addressrespectively
The image raw data is sent from D5M to DE2-70 boardwhere the FPGA on DE2-70 board will handle image pro-cessing and convert the data to RGB format to display on theVGA display [15ndash17] As a result we first capture the imageof experiment background to find the ranges of colors ofRGB and then define their location regions for color discrim-ination In order to reduce the effect of light variation theimage in RGB space will be converted into 119884119862119887119862119903 space [5]In addition the ranges of RGB fromD5Mare four times of the
general image So those the transformation can be expressedas
[
[
119884
119862119887
119862119903
]
]
= [
[
0299 0587 0114
minus01687 minus033126 05
05 minus041869 minus008131
]
]
[
[
119877
119866
119861
]
]
+[[
[
64
512
512
]]
]
(10)
3 Experiment Results
Gear ratio used in the 45 kg stair-climbing robot is 1320 andthe rated dc input power and speed of the 200-W BLDCMare 24V and 9600 rpm A preliminary experiment that theunloaded robot climbs up and goes down a gradual stair withthe rise of 120mm and depth of 400mm by wired control istestedThe results of every motion are shown in Figure 8 [11]It qualifies the designed robot Then we conduct the secondexperiment that the robot with loading of one arm moves upand down a steeper stair with the rise of 175mm and depth
8 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
Figure 12 Realized motion of climbing up at full loading
of 280mm The taped pictures of the experiment and everymotion are shown in Figures 9 and 10 respectively [12]
The third experiment contains image processing andgrasping armmotion In order to prevent target damagewhileclamping one pressure sensor is installed inside the clamperThe pressure output after calibrating is sent to DSP for refer-ence Figure 11 displays the sequentially taped pictures fromvideos of tracking capturing the cola can and putting it backby the robot arm Figure 11(a) presents the initial status ofthe experiment The arm tracks the corresponding directionafter the can is shifted left shown in Figures 11(b) and 11(c)Figures 11(d) and 11(e) depict the right tracking The armtracks the can back to central position shown in Figures 11(f)and 11(g) Then the robot stretches out the arm for capturingthe can and then draws the arm back presented in Figures
11(h)ndash11(l) Finally the robot puts the can back and goes backto the initial status presented in Figures 11(m)ndash11(p)
Finally we conduct the fourth experiment that the robotwith all loading moves up a stair with the rise of 150mm anddepth of 300mm The taped pictures of the experiment areshown in Figure 12 The climbing-up motion presents vari-ation in proceeding direction This is due to the plastic bellbeing almost torn into broken after long time of experimentaltest But it was not found
4 Conclusion
In the paper we have developed a stair-climbing robot andcompleted experiments of moving updown stairs and objecttracking capturing and loading In fact the stair-climbing
Mathematical Problems in Engineering 9
robot can provide service for the elders by capturing thespecific object at one floor and then climbing up or down toanother floor In addition the robot will patrol for securityby the CCD camera around the house while more imageprocessing functions are provided
Acknowledgments
The authors would like to express their appreciation toMinistry of Education and National Science Council Chinaunder Contract no NSC 100-2632-E-218-001-MY3 for finan-cial supporting
References
[1] K Harada H Hirukawa F Kanehiro et al ldquoDynamical balanceof a humanoid robot grasping an environmentrdquo in Proceedingsof the IEEERSJ International Conference on Intelligent Robotsand Systems pp 1167ndash1173 Sendai Japan October 2004
[2] Y Sugahara A Ohta K Hashimoto et al ldquoWalking up anddown stairs carrying a human by a biped locomotor with paral-lel mechanismrdquo in Proceedings of the IEEE IRSRSJ InternationalConference on Intelligent Robots and Systems pp 1489ndash1494Alberta Canada August 2005
[3] Y Konuma and S Hirose ldquoDevelopment of the stair-climbingbiped robot lsquoZero Walker-1rsquordquo in Proceedings of the 19th AnnualConference of the Robotics Society of Japan pp 851ndash852 2001
[4] Y Takahashi H Nakayama T Nagasawa et al ldquoRoboticassistance for aged peoplerdquo in Proceedings of the 37th SICEAnnual Conference pp 853ndash858 Chiba Japan July 1998
[5] AMalima E Ozgur andM Cetin ldquoA fast algorithm for vision-based hand gesture recognition for robot controlrdquo in Proceed-ings of the 14th IEEE Signal Processing and CommunicationsApplications pp 1ndash4 Antalya Turkey April 2006
[6] S Hutchinson G D Hager and P I Corke ldquoA tutorial on visualservo controlrdquo IEEE Transactions on Robotics and Automationvol 12 no 5 pp 651ndash670 1996
[7] C Copot C Lazar and A Burlacu ldquoPredictive control ofnonlinear visual servoing systems using image momentsrdquo IETControl Theory amp Applications vol 6 no 10 pp 1486ndash14962012
[8] Y Fang X Liu andX Zhang ldquoAdaptive active visual servoing ofnonholonomic mobile robotsrdquo IEEE Transactions on IndustrialElectronics vol 59 no 1 pp 486ndash497 2012
[9] B Tamadazte N L-F Piat and E Marchand ldquoA direct visualservoing scheme for automatic nanopositioningrdquo IEEEASMETransactions on Mechatronics vol 17 no 4 pp 728ndash736 2012
[10] X Zhang Y Fang and X Liu ldquoMotion-estimation-based visualservoing of nonholonomic mobile robotsrdquo IEEE Transactionson Robotics vol 27 no 6 pp 1167ndash1175 2011
[11] M-S Wang and Y-M Tu ldquoDesign and implementation of astair-climbing robotrdquo in Proceedings of the IEEE InternationalConference on Advanced Robotics and Its Social Impacts TaipeiTaiwan August 2008
[12] M-S Wang Y-S Kung and Y-M Tu ldquoFuzzy logic controldesign for a Stair-climbing robotrdquo International Journal of FuzzySystems vol 11 no 3 pp 174ndash182 2009
[13] Terasic Company THDB-D5M Hardware Specification 2008[14] Terasic Company TRDB-D5M User Guide 2008
[15] AK Benkhalil S S Sipson andWBooth ldquoReal-timedetectionand tracking of amoving object using a complex programmablelogic devicerdquo in Proceedings of the IEE Colloquium on TargetTracking and Data Fusion pp 1ndash7 Birmingham UK June 1998
[16] T Hamamoto S Nagao and K Aizawa ldquoReal-time objectstracking by using smart image sensor and FPGArdquo inProceedingsof the International Conference on Image Processing (ICIP rsquo02)pp III441ndashIII444 New York NY USA September 2002
[17] S-B Park A Teuner and B J Hosticka ldquoA motion detectionsystem based on a CMOS photo sensor arrayrdquo in Proceedingsof the International Conference on Image Processing vol 3 pp967ndash971 Chicago Ill USA October 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
(a) (b)
Figure 8 Realized motion of (a) climbing up and (b) going down by wired control
(a) (b) (c)
Figure 9 Realized motion of climbing up by FLC
(a) (b) (c)
Figure 10 Realized motion of going down by FLC
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
(g) (h)
(i) (j)
Figure 11 Continued
Mathematical Problems in Engineering 7
(k) (l)
(m) (n)
(o) (p)
Figure 11 The taped pictures of the experimental results on grasping
(iv) 119909 is odd and 119910 is odd
119877(119909119910) =
119877(119909119910minus1) + 119877(119909119910+1)
2
119861(119909119910) =
119861(119909minus1119910) + 119861(119909+1119910)
2
(9)
where 119909 and 119910 stand for the column address and row addressrespectively
The image raw data is sent from D5M to DE2-70 boardwhere the FPGA on DE2-70 board will handle image pro-cessing and convert the data to RGB format to display on theVGA display [15ndash17] As a result we first capture the imageof experiment background to find the ranges of colors ofRGB and then define their location regions for color discrim-ination In order to reduce the effect of light variation theimage in RGB space will be converted into 119884119862119887119862119903 space [5]In addition the ranges of RGB fromD5Mare four times of the
general image So those the transformation can be expressedas
[
[
119884
119862119887
119862119903
]
]
= [
[
0299 0587 0114
minus01687 minus033126 05
05 minus041869 minus008131
]
]
[
[
119877
119866
119861
]
]
+[[
[
64
512
512
]]
]
(10)
3 Experiment Results
Gear ratio used in the 45 kg stair-climbing robot is 1320 andthe rated dc input power and speed of the 200-W BLDCMare 24V and 9600 rpm A preliminary experiment that theunloaded robot climbs up and goes down a gradual stair withthe rise of 120mm and depth of 400mm by wired control istestedThe results of every motion are shown in Figure 8 [11]It qualifies the designed robot Then we conduct the secondexperiment that the robot with loading of one arm moves upand down a steeper stair with the rise of 175mm and depth
8 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
Figure 12 Realized motion of climbing up at full loading
of 280mm The taped pictures of the experiment and everymotion are shown in Figures 9 and 10 respectively [12]
The third experiment contains image processing andgrasping armmotion In order to prevent target damagewhileclamping one pressure sensor is installed inside the clamperThe pressure output after calibrating is sent to DSP for refer-ence Figure 11 displays the sequentially taped pictures fromvideos of tracking capturing the cola can and putting it backby the robot arm Figure 11(a) presents the initial status ofthe experiment The arm tracks the corresponding directionafter the can is shifted left shown in Figures 11(b) and 11(c)Figures 11(d) and 11(e) depict the right tracking The armtracks the can back to central position shown in Figures 11(f)and 11(g) Then the robot stretches out the arm for capturingthe can and then draws the arm back presented in Figures
11(h)ndash11(l) Finally the robot puts the can back and goes backto the initial status presented in Figures 11(m)ndash11(p)
Finally we conduct the fourth experiment that the robotwith all loading moves up a stair with the rise of 150mm anddepth of 300mm The taped pictures of the experiment areshown in Figure 12 The climbing-up motion presents vari-ation in proceeding direction This is due to the plastic bellbeing almost torn into broken after long time of experimentaltest But it was not found
4 Conclusion
In the paper we have developed a stair-climbing robot andcompleted experiments of moving updown stairs and objecttracking capturing and loading In fact the stair-climbing
Mathematical Problems in Engineering 9
robot can provide service for the elders by capturing thespecific object at one floor and then climbing up or down toanother floor In addition the robot will patrol for securityby the CCD camera around the house while more imageprocessing functions are provided
Acknowledgments
The authors would like to express their appreciation toMinistry of Education and National Science Council Chinaunder Contract no NSC 100-2632-E-218-001-MY3 for finan-cial supporting
References
[1] K Harada H Hirukawa F Kanehiro et al ldquoDynamical balanceof a humanoid robot grasping an environmentrdquo in Proceedingsof the IEEERSJ International Conference on Intelligent Robotsand Systems pp 1167ndash1173 Sendai Japan October 2004
[2] Y Sugahara A Ohta K Hashimoto et al ldquoWalking up anddown stairs carrying a human by a biped locomotor with paral-lel mechanismrdquo in Proceedings of the IEEE IRSRSJ InternationalConference on Intelligent Robots and Systems pp 1489ndash1494Alberta Canada August 2005
[3] Y Konuma and S Hirose ldquoDevelopment of the stair-climbingbiped robot lsquoZero Walker-1rsquordquo in Proceedings of the 19th AnnualConference of the Robotics Society of Japan pp 851ndash852 2001
[4] Y Takahashi H Nakayama T Nagasawa et al ldquoRoboticassistance for aged peoplerdquo in Proceedings of the 37th SICEAnnual Conference pp 853ndash858 Chiba Japan July 1998
[5] AMalima E Ozgur andM Cetin ldquoA fast algorithm for vision-based hand gesture recognition for robot controlrdquo in Proceed-ings of the 14th IEEE Signal Processing and CommunicationsApplications pp 1ndash4 Antalya Turkey April 2006
[6] S Hutchinson G D Hager and P I Corke ldquoA tutorial on visualservo controlrdquo IEEE Transactions on Robotics and Automationvol 12 no 5 pp 651ndash670 1996
[7] C Copot C Lazar and A Burlacu ldquoPredictive control ofnonlinear visual servoing systems using image momentsrdquo IETControl Theory amp Applications vol 6 no 10 pp 1486ndash14962012
[8] Y Fang X Liu andX Zhang ldquoAdaptive active visual servoing ofnonholonomic mobile robotsrdquo IEEE Transactions on IndustrialElectronics vol 59 no 1 pp 486ndash497 2012
[9] B Tamadazte N L-F Piat and E Marchand ldquoA direct visualservoing scheme for automatic nanopositioningrdquo IEEEASMETransactions on Mechatronics vol 17 no 4 pp 728ndash736 2012
[10] X Zhang Y Fang and X Liu ldquoMotion-estimation-based visualservoing of nonholonomic mobile robotsrdquo IEEE Transactionson Robotics vol 27 no 6 pp 1167ndash1175 2011
[11] M-S Wang and Y-M Tu ldquoDesign and implementation of astair-climbing robotrdquo in Proceedings of the IEEE InternationalConference on Advanced Robotics and Its Social Impacts TaipeiTaiwan August 2008
[12] M-S Wang Y-S Kung and Y-M Tu ldquoFuzzy logic controldesign for a Stair-climbing robotrdquo International Journal of FuzzySystems vol 11 no 3 pp 174ndash182 2009
[13] Terasic Company THDB-D5M Hardware Specification 2008[14] Terasic Company TRDB-D5M User Guide 2008
[15] AK Benkhalil S S Sipson andWBooth ldquoReal-timedetectionand tracking of amoving object using a complex programmablelogic devicerdquo in Proceedings of the IEE Colloquium on TargetTracking and Data Fusion pp 1ndash7 Birmingham UK June 1998
[16] T Hamamoto S Nagao and K Aizawa ldquoReal-time objectstracking by using smart image sensor and FPGArdquo inProceedingsof the International Conference on Image Processing (ICIP rsquo02)pp III441ndashIII444 New York NY USA September 2002
[17] S-B Park A Teuner and B J Hosticka ldquoA motion detectionsystem based on a CMOS photo sensor arrayrdquo in Proceedingsof the International Conference on Image Processing vol 3 pp967ndash971 Chicago Ill USA October 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
(g) (h)
(i) (j)
Figure 11 Continued
Mathematical Problems in Engineering 7
(k) (l)
(m) (n)
(o) (p)
Figure 11 The taped pictures of the experimental results on grasping
(iv) 119909 is odd and 119910 is odd
119877(119909119910) =
119877(119909119910minus1) + 119877(119909119910+1)
2
119861(119909119910) =
119861(119909minus1119910) + 119861(119909+1119910)
2
(9)
where 119909 and 119910 stand for the column address and row addressrespectively
The image raw data is sent from D5M to DE2-70 boardwhere the FPGA on DE2-70 board will handle image pro-cessing and convert the data to RGB format to display on theVGA display [15ndash17] As a result we first capture the imageof experiment background to find the ranges of colors ofRGB and then define their location regions for color discrim-ination In order to reduce the effect of light variation theimage in RGB space will be converted into 119884119862119887119862119903 space [5]In addition the ranges of RGB fromD5Mare four times of the
general image So those the transformation can be expressedas
[
[
119884
119862119887
119862119903
]
]
= [
[
0299 0587 0114
minus01687 minus033126 05
05 minus041869 minus008131
]
]
[
[
119877
119866
119861
]
]
+[[
[
64
512
512
]]
]
(10)
3 Experiment Results
Gear ratio used in the 45 kg stair-climbing robot is 1320 andthe rated dc input power and speed of the 200-W BLDCMare 24V and 9600 rpm A preliminary experiment that theunloaded robot climbs up and goes down a gradual stair withthe rise of 120mm and depth of 400mm by wired control istestedThe results of every motion are shown in Figure 8 [11]It qualifies the designed robot Then we conduct the secondexperiment that the robot with loading of one arm moves upand down a steeper stair with the rise of 175mm and depth
8 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
Figure 12 Realized motion of climbing up at full loading
of 280mm The taped pictures of the experiment and everymotion are shown in Figures 9 and 10 respectively [12]
The third experiment contains image processing andgrasping armmotion In order to prevent target damagewhileclamping one pressure sensor is installed inside the clamperThe pressure output after calibrating is sent to DSP for refer-ence Figure 11 displays the sequentially taped pictures fromvideos of tracking capturing the cola can and putting it backby the robot arm Figure 11(a) presents the initial status ofthe experiment The arm tracks the corresponding directionafter the can is shifted left shown in Figures 11(b) and 11(c)Figures 11(d) and 11(e) depict the right tracking The armtracks the can back to central position shown in Figures 11(f)and 11(g) Then the robot stretches out the arm for capturingthe can and then draws the arm back presented in Figures
11(h)ndash11(l) Finally the robot puts the can back and goes backto the initial status presented in Figures 11(m)ndash11(p)
Finally we conduct the fourth experiment that the robotwith all loading moves up a stair with the rise of 150mm anddepth of 300mm The taped pictures of the experiment areshown in Figure 12 The climbing-up motion presents vari-ation in proceeding direction This is due to the plastic bellbeing almost torn into broken after long time of experimentaltest But it was not found
4 Conclusion
In the paper we have developed a stair-climbing robot andcompleted experiments of moving updown stairs and objecttracking capturing and loading In fact the stair-climbing
Mathematical Problems in Engineering 9
robot can provide service for the elders by capturing thespecific object at one floor and then climbing up or down toanother floor In addition the robot will patrol for securityby the CCD camera around the house while more imageprocessing functions are provided
Acknowledgments
The authors would like to express their appreciation toMinistry of Education and National Science Council Chinaunder Contract no NSC 100-2632-E-218-001-MY3 for finan-cial supporting
References
[1] K Harada H Hirukawa F Kanehiro et al ldquoDynamical balanceof a humanoid robot grasping an environmentrdquo in Proceedingsof the IEEERSJ International Conference on Intelligent Robotsand Systems pp 1167ndash1173 Sendai Japan October 2004
[2] Y Sugahara A Ohta K Hashimoto et al ldquoWalking up anddown stairs carrying a human by a biped locomotor with paral-lel mechanismrdquo in Proceedings of the IEEE IRSRSJ InternationalConference on Intelligent Robots and Systems pp 1489ndash1494Alberta Canada August 2005
[3] Y Konuma and S Hirose ldquoDevelopment of the stair-climbingbiped robot lsquoZero Walker-1rsquordquo in Proceedings of the 19th AnnualConference of the Robotics Society of Japan pp 851ndash852 2001
[4] Y Takahashi H Nakayama T Nagasawa et al ldquoRoboticassistance for aged peoplerdquo in Proceedings of the 37th SICEAnnual Conference pp 853ndash858 Chiba Japan July 1998
[5] AMalima E Ozgur andM Cetin ldquoA fast algorithm for vision-based hand gesture recognition for robot controlrdquo in Proceed-ings of the 14th IEEE Signal Processing and CommunicationsApplications pp 1ndash4 Antalya Turkey April 2006
[6] S Hutchinson G D Hager and P I Corke ldquoA tutorial on visualservo controlrdquo IEEE Transactions on Robotics and Automationvol 12 no 5 pp 651ndash670 1996
[7] C Copot C Lazar and A Burlacu ldquoPredictive control ofnonlinear visual servoing systems using image momentsrdquo IETControl Theory amp Applications vol 6 no 10 pp 1486ndash14962012
[8] Y Fang X Liu andX Zhang ldquoAdaptive active visual servoing ofnonholonomic mobile robotsrdquo IEEE Transactions on IndustrialElectronics vol 59 no 1 pp 486ndash497 2012
[9] B Tamadazte N L-F Piat and E Marchand ldquoA direct visualservoing scheme for automatic nanopositioningrdquo IEEEASMETransactions on Mechatronics vol 17 no 4 pp 728ndash736 2012
[10] X Zhang Y Fang and X Liu ldquoMotion-estimation-based visualservoing of nonholonomic mobile robotsrdquo IEEE Transactionson Robotics vol 27 no 6 pp 1167ndash1175 2011
[11] M-S Wang and Y-M Tu ldquoDesign and implementation of astair-climbing robotrdquo in Proceedings of the IEEE InternationalConference on Advanced Robotics and Its Social Impacts TaipeiTaiwan August 2008
[12] M-S Wang Y-S Kung and Y-M Tu ldquoFuzzy logic controldesign for a Stair-climbing robotrdquo International Journal of FuzzySystems vol 11 no 3 pp 174ndash182 2009
[13] Terasic Company THDB-D5M Hardware Specification 2008[14] Terasic Company TRDB-D5M User Guide 2008
[15] AK Benkhalil S S Sipson andWBooth ldquoReal-timedetectionand tracking of amoving object using a complex programmablelogic devicerdquo in Proceedings of the IEE Colloquium on TargetTracking and Data Fusion pp 1ndash7 Birmingham UK June 1998
[16] T Hamamoto S Nagao and K Aizawa ldquoReal-time objectstracking by using smart image sensor and FPGArdquo inProceedingsof the International Conference on Image Processing (ICIP rsquo02)pp III441ndashIII444 New York NY USA September 2002
[17] S-B Park A Teuner and B J Hosticka ldquoA motion detectionsystem based on a CMOS photo sensor arrayrdquo in Proceedingsof the International Conference on Image Processing vol 3 pp967ndash971 Chicago Ill USA October 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
(k) (l)
(m) (n)
(o) (p)
Figure 11 The taped pictures of the experimental results on grasping
(iv) 119909 is odd and 119910 is odd
119877(119909119910) =
119877(119909119910minus1) + 119877(119909119910+1)
2
119861(119909119910) =
119861(119909minus1119910) + 119861(119909+1119910)
2
(9)
where 119909 and 119910 stand for the column address and row addressrespectively
The image raw data is sent from D5M to DE2-70 boardwhere the FPGA on DE2-70 board will handle image pro-cessing and convert the data to RGB format to display on theVGA display [15ndash17] As a result we first capture the imageof experiment background to find the ranges of colors ofRGB and then define their location regions for color discrim-ination In order to reduce the effect of light variation theimage in RGB space will be converted into 119884119862119887119862119903 space [5]In addition the ranges of RGB fromD5Mare four times of the
general image So those the transformation can be expressedas
[
[
119884
119862119887
119862119903
]
]
= [
[
0299 0587 0114
minus01687 minus033126 05
05 minus041869 minus008131
]
]
[
[
119877
119866
119861
]
]
+[[
[
64
512
512
]]
]
(10)
3 Experiment Results
Gear ratio used in the 45 kg stair-climbing robot is 1320 andthe rated dc input power and speed of the 200-W BLDCMare 24V and 9600 rpm A preliminary experiment that theunloaded robot climbs up and goes down a gradual stair withthe rise of 120mm and depth of 400mm by wired control istestedThe results of every motion are shown in Figure 8 [11]It qualifies the designed robot Then we conduct the secondexperiment that the robot with loading of one arm moves upand down a steeper stair with the rise of 175mm and depth
8 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
Figure 12 Realized motion of climbing up at full loading
of 280mm The taped pictures of the experiment and everymotion are shown in Figures 9 and 10 respectively [12]
The third experiment contains image processing andgrasping armmotion In order to prevent target damagewhileclamping one pressure sensor is installed inside the clamperThe pressure output after calibrating is sent to DSP for refer-ence Figure 11 displays the sequentially taped pictures fromvideos of tracking capturing the cola can and putting it backby the robot arm Figure 11(a) presents the initial status ofthe experiment The arm tracks the corresponding directionafter the can is shifted left shown in Figures 11(b) and 11(c)Figures 11(d) and 11(e) depict the right tracking The armtracks the can back to central position shown in Figures 11(f)and 11(g) Then the robot stretches out the arm for capturingthe can and then draws the arm back presented in Figures
11(h)ndash11(l) Finally the robot puts the can back and goes backto the initial status presented in Figures 11(m)ndash11(p)
Finally we conduct the fourth experiment that the robotwith all loading moves up a stair with the rise of 150mm anddepth of 300mm The taped pictures of the experiment areshown in Figure 12 The climbing-up motion presents vari-ation in proceeding direction This is due to the plastic bellbeing almost torn into broken after long time of experimentaltest But it was not found
4 Conclusion
In the paper we have developed a stair-climbing robot andcompleted experiments of moving updown stairs and objecttracking capturing and loading In fact the stair-climbing
Mathematical Problems in Engineering 9
robot can provide service for the elders by capturing thespecific object at one floor and then climbing up or down toanother floor In addition the robot will patrol for securityby the CCD camera around the house while more imageprocessing functions are provided
Acknowledgments
The authors would like to express their appreciation toMinistry of Education and National Science Council Chinaunder Contract no NSC 100-2632-E-218-001-MY3 for finan-cial supporting
References
[1] K Harada H Hirukawa F Kanehiro et al ldquoDynamical balanceof a humanoid robot grasping an environmentrdquo in Proceedingsof the IEEERSJ International Conference on Intelligent Robotsand Systems pp 1167ndash1173 Sendai Japan October 2004
[2] Y Sugahara A Ohta K Hashimoto et al ldquoWalking up anddown stairs carrying a human by a biped locomotor with paral-lel mechanismrdquo in Proceedings of the IEEE IRSRSJ InternationalConference on Intelligent Robots and Systems pp 1489ndash1494Alberta Canada August 2005
[3] Y Konuma and S Hirose ldquoDevelopment of the stair-climbingbiped robot lsquoZero Walker-1rsquordquo in Proceedings of the 19th AnnualConference of the Robotics Society of Japan pp 851ndash852 2001
[4] Y Takahashi H Nakayama T Nagasawa et al ldquoRoboticassistance for aged peoplerdquo in Proceedings of the 37th SICEAnnual Conference pp 853ndash858 Chiba Japan July 1998
[5] AMalima E Ozgur andM Cetin ldquoA fast algorithm for vision-based hand gesture recognition for robot controlrdquo in Proceed-ings of the 14th IEEE Signal Processing and CommunicationsApplications pp 1ndash4 Antalya Turkey April 2006
[6] S Hutchinson G D Hager and P I Corke ldquoA tutorial on visualservo controlrdquo IEEE Transactions on Robotics and Automationvol 12 no 5 pp 651ndash670 1996
[7] C Copot C Lazar and A Burlacu ldquoPredictive control ofnonlinear visual servoing systems using image momentsrdquo IETControl Theory amp Applications vol 6 no 10 pp 1486ndash14962012
[8] Y Fang X Liu andX Zhang ldquoAdaptive active visual servoing ofnonholonomic mobile robotsrdquo IEEE Transactions on IndustrialElectronics vol 59 no 1 pp 486ndash497 2012
[9] B Tamadazte N L-F Piat and E Marchand ldquoA direct visualservoing scheme for automatic nanopositioningrdquo IEEEASMETransactions on Mechatronics vol 17 no 4 pp 728ndash736 2012
[10] X Zhang Y Fang and X Liu ldquoMotion-estimation-based visualservoing of nonholonomic mobile robotsrdquo IEEE Transactionson Robotics vol 27 no 6 pp 1167ndash1175 2011
[11] M-S Wang and Y-M Tu ldquoDesign and implementation of astair-climbing robotrdquo in Proceedings of the IEEE InternationalConference on Advanced Robotics and Its Social Impacts TaipeiTaiwan August 2008
[12] M-S Wang Y-S Kung and Y-M Tu ldquoFuzzy logic controldesign for a Stair-climbing robotrdquo International Journal of FuzzySystems vol 11 no 3 pp 174ndash182 2009
[13] Terasic Company THDB-D5M Hardware Specification 2008[14] Terasic Company TRDB-D5M User Guide 2008
[15] AK Benkhalil S S Sipson andWBooth ldquoReal-timedetectionand tracking of amoving object using a complex programmablelogic devicerdquo in Proceedings of the IEE Colloquium on TargetTracking and Data Fusion pp 1ndash7 Birmingham UK June 1998
[16] T Hamamoto S Nagao and K Aizawa ldquoReal-time objectstracking by using smart image sensor and FPGArdquo inProceedingsof the International Conference on Image Processing (ICIP rsquo02)pp III441ndashIII444 New York NY USA September 2002
[17] S-B Park A Teuner and B J Hosticka ldquoA motion detectionsystem based on a CMOS photo sensor arrayrdquo in Proceedingsof the International Conference on Image Processing vol 3 pp967ndash971 Chicago Ill USA October 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
(a) (b)
(c) (d)
(e) (f)
Figure 12 Realized motion of climbing up at full loading
of 280mm The taped pictures of the experiment and everymotion are shown in Figures 9 and 10 respectively [12]
The third experiment contains image processing andgrasping armmotion In order to prevent target damagewhileclamping one pressure sensor is installed inside the clamperThe pressure output after calibrating is sent to DSP for refer-ence Figure 11 displays the sequentially taped pictures fromvideos of tracking capturing the cola can and putting it backby the robot arm Figure 11(a) presents the initial status ofthe experiment The arm tracks the corresponding directionafter the can is shifted left shown in Figures 11(b) and 11(c)Figures 11(d) and 11(e) depict the right tracking The armtracks the can back to central position shown in Figures 11(f)and 11(g) Then the robot stretches out the arm for capturingthe can and then draws the arm back presented in Figures
11(h)ndash11(l) Finally the robot puts the can back and goes backto the initial status presented in Figures 11(m)ndash11(p)
Finally we conduct the fourth experiment that the robotwith all loading moves up a stair with the rise of 150mm anddepth of 300mm The taped pictures of the experiment areshown in Figure 12 The climbing-up motion presents vari-ation in proceeding direction This is due to the plastic bellbeing almost torn into broken after long time of experimentaltest But it was not found
4 Conclusion
In the paper we have developed a stair-climbing robot andcompleted experiments of moving updown stairs and objecttracking capturing and loading In fact the stair-climbing
Mathematical Problems in Engineering 9
robot can provide service for the elders by capturing thespecific object at one floor and then climbing up or down toanother floor In addition the robot will patrol for securityby the CCD camera around the house while more imageprocessing functions are provided
Acknowledgments
The authors would like to express their appreciation toMinistry of Education and National Science Council Chinaunder Contract no NSC 100-2632-E-218-001-MY3 for finan-cial supporting
References
[1] K Harada H Hirukawa F Kanehiro et al ldquoDynamical balanceof a humanoid robot grasping an environmentrdquo in Proceedingsof the IEEERSJ International Conference on Intelligent Robotsand Systems pp 1167ndash1173 Sendai Japan October 2004
[2] Y Sugahara A Ohta K Hashimoto et al ldquoWalking up anddown stairs carrying a human by a biped locomotor with paral-lel mechanismrdquo in Proceedings of the IEEE IRSRSJ InternationalConference on Intelligent Robots and Systems pp 1489ndash1494Alberta Canada August 2005
[3] Y Konuma and S Hirose ldquoDevelopment of the stair-climbingbiped robot lsquoZero Walker-1rsquordquo in Proceedings of the 19th AnnualConference of the Robotics Society of Japan pp 851ndash852 2001
[4] Y Takahashi H Nakayama T Nagasawa et al ldquoRoboticassistance for aged peoplerdquo in Proceedings of the 37th SICEAnnual Conference pp 853ndash858 Chiba Japan July 1998
[5] AMalima E Ozgur andM Cetin ldquoA fast algorithm for vision-based hand gesture recognition for robot controlrdquo in Proceed-ings of the 14th IEEE Signal Processing and CommunicationsApplications pp 1ndash4 Antalya Turkey April 2006
[6] S Hutchinson G D Hager and P I Corke ldquoA tutorial on visualservo controlrdquo IEEE Transactions on Robotics and Automationvol 12 no 5 pp 651ndash670 1996
[7] C Copot C Lazar and A Burlacu ldquoPredictive control ofnonlinear visual servoing systems using image momentsrdquo IETControl Theory amp Applications vol 6 no 10 pp 1486ndash14962012
[8] Y Fang X Liu andX Zhang ldquoAdaptive active visual servoing ofnonholonomic mobile robotsrdquo IEEE Transactions on IndustrialElectronics vol 59 no 1 pp 486ndash497 2012
[9] B Tamadazte N L-F Piat and E Marchand ldquoA direct visualservoing scheme for automatic nanopositioningrdquo IEEEASMETransactions on Mechatronics vol 17 no 4 pp 728ndash736 2012
[10] X Zhang Y Fang and X Liu ldquoMotion-estimation-based visualservoing of nonholonomic mobile robotsrdquo IEEE Transactionson Robotics vol 27 no 6 pp 1167ndash1175 2011
[11] M-S Wang and Y-M Tu ldquoDesign and implementation of astair-climbing robotrdquo in Proceedings of the IEEE InternationalConference on Advanced Robotics and Its Social Impacts TaipeiTaiwan August 2008
[12] M-S Wang Y-S Kung and Y-M Tu ldquoFuzzy logic controldesign for a Stair-climbing robotrdquo International Journal of FuzzySystems vol 11 no 3 pp 174ndash182 2009
[13] Terasic Company THDB-D5M Hardware Specification 2008[14] Terasic Company TRDB-D5M User Guide 2008
[15] AK Benkhalil S S Sipson andWBooth ldquoReal-timedetectionand tracking of amoving object using a complex programmablelogic devicerdquo in Proceedings of the IEE Colloquium on TargetTracking and Data Fusion pp 1ndash7 Birmingham UK June 1998
[16] T Hamamoto S Nagao and K Aizawa ldquoReal-time objectstracking by using smart image sensor and FPGArdquo inProceedingsof the International Conference on Image Processing (ICIP rsquo02)pp III441ndashIII444 New York NY USA September 2002
[17] S-B Park A Teuner and B J Hosticka ldquoA motion detectionsystem based on a CMOS photo sensor arrayrdquo in Proceedingsof the International Conference on Image Processing vol 3 pp967ndash971 Chicago Ill USA October 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
robot can provide service for the elders by capturing thespecific object at one floor and then climbing up or down toanother floor In addition the robot will patrol for securityby the CCD camera around the house while more imageprocessing functions are provided
Acknowledgments
The authors would like to express their appreciation toMinistry of Education and National Science Council Chinaunder Contract no NSC 100-2632-E-218-001-MY3 for finan-cial supporting
References
[1] K Harada H Hirukawa F Kanehiro et al ldquoDynamical balanceof a humanoid robot grasping an environmentrdquo in Proceedingsof the IEEERSJ International Conference on Intelligent Robotsand Systems pp 1167ndash1173 Sendai Japan October 2004
[2] Y Sugahara A Ohta K Hashimoto et al ldquoWalking up anddown stairs carrying a human by a biped locomotor with paral-lel mechanismrdquo in Proceedings of the IEEE IRSRSJ InternationalConference on Intelligent Robots and Systems pp 1489ndash1494Alberta Canada August 2005
[3] Y Konuma and S Hirose ldquoDevelopment of the stair-climbingbiped robot lsquoZero Walker-1rsquordquo in Proceedings of the 19th AnnualConference of the Robotics Society of Japan pp 851ndash852 2001
[4] Y Takahashi H Nakayama T Nagasawa et al ldquoRoboticassistance for aged peoplerdquo in Proceedings of the 37th SICEAnnual Conference pp 853ndash858 Chiba Japan July 1998
[5] AMalima E Ozgur andM Cetin ldquoA fast algorithm for vision-based hand gesture recognition for robot controlrdquo in Proceed-ings of the 14th IEEE Signal Processing and CommunicationsApplications pp 1ndash4 Antalya Turkey April 2006
[6] S Hutchinson G D Hager and P I Corke ldquoA tutorial on visualservo controlrdquo IEEE Transactions on Robotics and Automationvol 12 no 5 pp 651ndash670 1996
[7] C Copot C Lazar and A Burlacu ldquoPredictive control ofnonlinear visual servoing systems using image momentsrdquo IETControl Theory amp Applications vol 6 no 10 pp 1486ndash14962012
[8] Y Fang X Liu andX Zhang ldquoAdaptive active visual servoing ofnonholonomic mobile robotsrdquo IEEE Transactions on IndustrialElectronics vol 59 no 1 pp 486ndash497 2012
[9] B Tamadazte N L-F Piat and E Marchand ldquoA direct visualservoing scheme for automatic nanopositioningrdquo IEEEASMETransactions on Mechatronics vol 17 no 4 pp 728ndash736 2012
[10] X Zhang Y Fang and X Liu ldquoMotion-estimation-based visualservoing of nonholonomic mobile robotsrdquo IEEE Transactionson Robotics vol 27 no 6 pp 1167ndash1175 2011
[11] M-S Wang and Y-M Tu ldquoDesign and implementation of astair-climbing robotrdquo in Proceedings of the IEEE InternationalConference on Advanced Robotics and Its Social Impacts TaipeiTaiwan August 2008
[12] M-S Wang Y-S Kung and Y-M Tu ldquoFuzzy logic controldesign for a Stair-climbing robotrdquo International Journal of FuzzySystems vol 11 no 3 pp 174ndash182 2009
[13] Terasic Company THDB-D5M Hardware Specification 2008[14] Terasic Company TRDB-D5M User Guide 2008
[15] AK Benkhalil S S Sipson andWBooth ldquoReal-timedetectionand tracking of amoving object using a complex programmablelogic devicerdquo in Proceedings of the IEE Colloquium on TargetTracking and Data Fusion pp 1ndash7 Birmingham UK June 1998
[16] T Hamamoto S Nagao and K Aizawa ldquoReal-time objectstracking by using smart image sensor and FPGArdquo inProceedingsof the International Conference on Image Processing (ICIP rsquo02)pp III441ndashIII444 New York NY USA September 2002
[17] S-B Park A Teuner and B J Hosticka ldquoA motion detectionsystem based on a CMOS photo sensor arrayrdquo in Proceedingsof the International Conference on Image Processing vol 3 pp967ndash971 Chicago Ill USA October 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of