Embed Size (px)
Citation preview

Pvot~res~ ttr .Nuclear Enert~y. Vol 23. No. [. pp 1-33. I~t~). ~ql~-Itrq~?;#l 9P IN1 - 5~ Printed in Great Britain All nght~ reserved. ~ b~'.~l Pergamon Pro,, pie
ROBOT APPLICATIONS IN NUCLEAR POWER PLANTS
FLOYD E. GELHAUS* and HARRY T. ROMAN+
*Reliability and Maintenance Technology, Nuclear Power Division. Electric Power Research Institute, Palo Alto, CA 94303, U.S.A.
+Research and Development , Public Service Electric and Gas Company, Newark, NJ, U.S.A.
(Received 14 September [989)
Abstract - After a basic introductory section, the past four to five years of increasing use Of robotic devices in nuclear power plants is highlighted. A methodology for selecting robots for power plant tasks has evolved from these experiences, and is explained in some detail. Certain considerations that restrict the use of robots are discussed. The acceptance of robots as tools for power plant missions will increase dramatically in the future with the co-design of robot and power plant.
I. INTRODUCTION
i.I Background
The use of remotely operated and robot-like equipment to protect nuclear workers in high radiation areas is not new (Moore, 1984). Single purpose devices for tasks such as pipe cutting, welding, steam generator tube inspection and repair, and ultrasonic scanning of pipe sections for crack detection were definitely in evidence in the Late 1970s.
Several new systems emerged during the early year of this decade; entrepreneurs were taking advantage of the then-new microprocessor and small-but-capable computer technology to produce mobile devices for general power plant surveillance and inspection. Unlike their slngle-purpose predecessors, however, the designs for most of these multipurpose robots came from the supplier and not from the utility end user. Although cost-justified on paper at an early stage (Kok, 1934, White, 1934, and 8aum and Matthews, 1985), utility acceptance of multipurpose robots has been evolutionary, not revolutionary, and highly site- and appllcation-spec£fic. Table I, a summary of known robotic applications, shows that the accomplishments and the cost savings are impressive. And so is the transfer of technology that has occurred. Robots are of current interest to a broad spectrum of disciplines (e.g., space, underwater, military, explosive ordnance disposal), and several of the successful power plant missions shown in Table I have used robots originally developed for other industries and adopted for nuclear plant use.
The goal of EPRI-sponsored robotic research is to promote the use of robots to reduce human exposure to hostile environments (Gelhaus, 1988). Because of its early start in the nuclear arena, there is usually an immediate conclusion that "hostile" relates only to ionizing radiation. While it is certainly true that the use of a robot has saved humans from exposure to radiation, it is equally true that robot use can reduce human exposure to hot and humid environments (120 degrees Fahrenheit and 1O0 percent relative humidity are common conditions in power plants), can assist humans with tasks requiring tremendous strength, can function in oxygen-deficient atmospheres and in geometric spaces that preclude human entry, and can help or in some instances replace the human dealing with tasks that are repetitious and/or of low skill level. With this expanded understanding of hostile, it is obvious that beneficial robotic products can pass easily between industries as well as to/from the nuclear, fossil, and transmission and distribution portions of the electricity generating industry.

2 F . E . GELH,~US and H. T. RoM.~x
Table I. Utility robot cost savings information.
Approximate Reported Utility Application Robot Cost Savings
Boston Edison
Carolina Power and Light
Cleveland Gas and Electric
Consolidated Edison
Duke Po~:er
General Public Utilities
Maine Yankee
Niagara Mohawk
Northeast Utilities
Northern States Power
Philadelphia Electric Co.
Public Service Electric & Gas
Public Service of New Hampshire
Washington Public Power Supply System
Wisconsin Electric
INCHWORM
ARD Flange cleaner
PLS Pipe Crawlers
MOOSE, floor scabbling at Indian Point
CECIL, steam generator inspection at Indian Point
MiniRover, RV inspection & object retrieval at Catawba
RMIOA, dual-arm manipulators and plant modifications for radwaste handling
See Table 3.
INCHWORM
SURVEYOR, inspection of radwaste drum storage a~ea at Nine Mile Point
INCHWORM
MiniRover
(i) $6/ft 2 for areas in excess of lO00 ft 2
$30-40,000 $500,000
$175-200,000 $25-40,000
(I)
TOMCAT, line and (2) transformer repair
INCHWORM
ROSA, steam generator (I) inspection and maintenance at Salem
SCAVENGER, fuel $10-30,000 pool cleaning at Hope Creek
MiniRover, inspect reactor $54,000 pressure vessel at Salem
MiniRover, $30-40,000 inspect water in-take tunnels
Phantom ROV
HiniRover, $30-40,000 inspect RV
$47,000 annually
$50-100,000 annually
$635,000
$7,000 per day of use
$500,000
(i) No purchase. Robots were leased or services purchased. (2) Utility was the host for the EPRl-sponsored development of TOMCAT.

Robot applications in nuclear po~er plants 3
Nuclear plant robotic actvity will naturally spill over to fossil-fueled power plants as experience with nuclear applications gives plant managers confidence with robotics. While the cost justification for fossil plant applications may not be as great as for nuclear plants, the use of robots in these stations will broadly expand the market potential for all utility robotic devices and hence ultimately lead to "cheap" generic robotic designs, with options available for both fossil and nuclear plant applications.
1.2 A definition
The concept that each of us holds in our minds as to what a robot is and what one does is a composite of what we have seen, read, and heard. On one hand, science fiction authors/illustrators and movie scripts have long promoted the idea chat robots are devices that look like humans and perform human tasks (Asimov and Frenkel, 1985). In contrast, views of new production facilities such as an automobile fabrication plant give the distinct impression that robots look nothing like ourselves, but are fixed-in-place devices that perform repetitious and accurate tasks in a totally nonhuman manner.
The discussion here promotes neither of these views. Rather, a robot is considered to be a computer, with articulators and sensors that permit it co interact with its environment (Bartholet, 1984). Since this definition places no stipulation on the physical placement of the computer, many devices that are in use and are known by various names (e.g., remotely operated smart tooling), now are titled "robot" if a computer provides the intelligence/control focal point of the overall system. This definition also emphasizes that robots, being intimately tied to computer technology, will experience similar rapid technological advances.
Table 2. Categorization of major subsystems within one of the three robot systems (Lewis, 1987).
ROBOT ROBOT SYSTEMS SUBSYSTEM COMPUTER SENSORS MECHANICAL
Structural X Energy X Controllers X Propulsion X Sensory X Navigation X Communications X Operating (1) X
(I) Since this subsystem interlinks all robot functions, the computer is to varying degrees a part of all subsystems.
1.3 Robot d e s i ~ n / c o n f i ~ u r a t l o n
B a r t h o l e c ' s d e f i n i t i o n promotes d e f i n i n g a r o b o t as a d e v i c e c o n s i s t i n g o f : (1 ) a computer system, ( 2 ) a senso r sys tem, and (3 ) a mechan ica l system. Tab le 2 shows a f i r s t - l e v e l breakdown o f the c o n t e n t s o f t h e s e ma jo r sys tems. A l t h o u g h t h e r e a re s e v e r a l g r e y a reas i n the c a t e g o r i z a t i o n , the t a b l e p r o v i d e s a v e r y c o n v e n i e n t l o g i c s t r u c t u r e f o r e v a l u a t i n g the a t t r i b u t e s o f one system and compar ing the c a p a b i l i t i e s o f s e v e r a l sys tems.
Every robot has a mechanical closure structure that also provides the mount and housing for a variety of work, sensory and control equipment; a mobile robot has, in a d d i t i o n , a means o f l o c o m o t i o n and, pe rhaps , a ca rgo pay load a r e a . E l e c t r l c a l , h y d r a u l i c , a n d / o r pneumat ic power must be s u p p l i e d t h r o u g h an u m b i l i c a l chord { c a l l e d a t e t h e r in mob i l e sys tems ) , o r must be c a r r i e d i n o n - b o a r d s t o r a g e d e v i c e s i f the r o b o t i s mob i l e and untethered (Silverman and Simmons, 1985).

4 F .E . GELH.~t:S ;rod H. T. ROMAN
Early, fixed-place robots utilized controllers that were typically electromechanical devices programmed to perform one specific task. Today's microprocessor-based computers control numerous robot functions through a sophisticated data bus, typically controlling: manipulator/propulsion drive systems; sensor systems, including health status monitoring and data acquisition and analysis; and the energy systems, monitoring for surges, over- loads, and loss of power. Sensors obtain information about the robot's internal and external environment, and provide operational data when the robot is remotely contro1[ed. Internal sensors are used to monitor joint orientation, heat buildup, and the energy reserve in storage systems on-board a mobile platform. A mobile robot's requirement for navigation information is obvious. It is necessary to maintain a fix on its position relative to an external landmark or coordinate system (Heystel, 1985). Even a fixed-place robot requires a basic form of navigation, since the various joints of its manipulator or arm must be directed in space in order to do useful work (Cannon, 1984). With all robots, as with ships and aircraft, navigation includes path planning and collision avoidance (Oppenheim, 1987).
Bidirectional cor~nunications must occur between humans and robots. We can direct an electromechanical system by tapping on a keyboard, pushing joysticks, or by talking in the case of a machine with speech recognition. The robot might talk back, since many speech synthesizers are available that string phonemes together into several thousand word vocabularies. Robots equipped with microphones and video cameras communicate with humans, extending two of our five senses to remote areas, part of a process called telepresence. (Fisher, 1987).
The set of programs that determines how the robot's computer will function is its operating system, allowing input of data from numerous sources and directing the output data to various devices. A high-level language can be the operating system, with current systems offering intelligence and fault tolerance of hardware failures. A~ a robot becomes mobile and moves towards a level of autonomy, the computer structure becomes a more complex hierarchy, with a master and several suboperattng systems. Future mobile robots will incorporate expert systems and other artificial intelligence techniques into their sensory, navigation, operating, and controller subsystems (Weisbin, 1986).
1.4 Available r o b o t systems
Because of the specialization demanded of robots by the various work environments, separate availability directories have been published for fixed-place (Flora, 1983, McDermott and Alexander, 1985, and Nor, 1988), undersea (Busby, 1987), and terrestrial (Heieran, 1987) systems, and an overview catalog is available from Japan (Kobayashi, 1986.)
Typical format for these publications includes a photograph, a specifications summary sheet, and manufacturer contact information; technical paper references and/or cost data are sometimes also included.
In addition to these directories, there ace numerous nontextbook publications that treat basic robotic concepts (Holland, 1983), while others (e.g., Haslak, 1983) delve into the logic of design and the mathematics required to analyze and describe manipulator motions. On-line computer databases, such as Compendex, Robomatix, and Robotics Information, provide for browsing through millions of references (Conkling, 1986).
During the past four years, these data have been culled and sorted into many subsets, including several describing robotic applications in nuclear power plants (Moore, 1984; Larcombe and Halsall, 1984; Taylor, 1984; Fischetti, 1985; Varley (ed.), 1986, 1987, and 1988). Robot use in a variety of hostile environments is currently promoted through funding from several agencies. A comprehensive review by Parsons (1986) and an earlier survey compilation (Martin and Kuban, 1985) provide additional information. This level of documentation precludes any need for another comprehensive summary. In order to highlight key technical attributes it is useful, however, to briefly discuss a few examples of available systems.
Today's generation of fixed-place robots within the manufacturing environment incorporate electric (rather than hydraulic) actuators. Figure l's specifications show another attribute of these systems: the large ratio (from 4 or 5 to as much as 70 to i) of robot weight to load-carrying capability. This attribute is a key one when designing a

Rob~t applications in nuch:ar p~w~cr pl:lnt,,
small mobile system for a power plant. Manipulators for mobile robots demand designs with a greatly improved weight ratio, and must use efficient electrical means for their actuations.
This is not the case for TOMCAT, a large robotic system for maintenance of high- voltage power lines, that uses a 130-lb manipulator arm with a 55-1b lift capacity when extended 51 inches (Henkener, 1987). The mobile platform is a bucket truck (Figure 2), crane, or conductor cart, easily large enough to account for the manipulator's hydraulic power requirements.
The manipulator arm used on the TOMCAT is shown in Figure 3 along with others that are experiencing increased use by the industry. The National Aeronautics and Space Administration is currently a leading promoter of research on the topic of multiple arm
Fig. I. Two examples of modern, all-electric, fixed-place robots. (a) T 786, for heavy-payload applications, handles up to 200 lb. The robot weighs 6,350 lb. (b) T 646, for long-reach applications, handles up to 50 lb. The robot weighs 3,300 lb. Photographs are courtesy of Cincinnati Milacron.

6 F, E. GELH.-~US and H. T. Ro~,t,.xy
_ J
Fig. i. Continued
coordination, an absolute necessity if robots are co help in the erection of a space station and a desirable attribute for many power plant missions. Algorithm development for the control of payloads, collision avoidance, and force reflection research is now under way (BarCholet, 1989; Burdick, 1989).
Small mobile systems are quite variable in their configuration and capability. The mechanical propulsion system is a major differentiacor. When stair climbing is not desired, wheeled robots, such as chose in Figure 4, can be used. Negotiation of stairways is accomplished by tracked vehicles. Two Cracks are sufficient for climbing/descending, but four-and/or six-tracked robots allow for a much smoother transition onto the stair landing (Figure 5). The center of gravity must be kept as low as possible, and robot operators frequently use the vehicle's manipulator Co adjust the center for more stable stair/ramp ascending and descending. Considering chac optimum robot body design includes a proper ground clearance, the height of an object lying on the floor that can be traversed is considerably greater for a tracked Chart for a wheeled system. However, the best uneven terrain capability is afforded by a walking robot.
The numerous attempts to produce walking machines were Leapfrogged in 1983 when Odecics, Inc., unveiled the ODEX-I demonstrator (Bartholet, 1984). With all walking algorithms embedded in the seven on-board computers, the operator could maneuver the robot with a simple joystick. Later versions of the ODEX gave the robot stair climbing capability, and a gyro system to assure stabillcy. The system shown in Figure 6, dubbed ROBIN by its owners (Byrd, 1988), is a laboratory experimental device currently undergoing evaluation and further enhancements at the Savannah River Laboratory.

Robot applications in nuclear p~, 'er plants 7
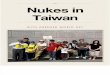
Fig. 2. TOMCAT, a remotely controlled line maintenance system developed unde~ EPRI funding. Prototype unit shown here at a test tower set up by Philadelphia Electric Company to simulate a field installation of a 230 kV insulator string.

"; F . E . G ~ - I H \ ~ • a n d I't. 1. R~,~.I \ ",
Wheeled, tracked, and walking robots all have limited functioning i n water. As is evident from Busby's catalog, the offshore drilling rig industry gave birth to many (aLbeit large) fully submersible robotic systems (ROVs) to remove the.human (diver) from a hostile marine environment (five to eight knot currents in cold water with almost no visibility). Many of the functions required by a power plant maintenance robot (e.g.~ cutting, welding, inspecting, cleaning) were routinely carried out by these ROVs. With the tremendous slowdown of that industry came the birth of a new family of underwater robots, the mini- ROVs (Busby, 1987). Figure 7 shows a few of these systems. As shown in Table I, this capability has been utilized by several utilities, and represents the arena of greatest inter-industry transfer of robotic technology.
Fig. 3. Manipulator Systems. (a) Kraft TeleRobotics'dual arm force feedback manipulator system slave assembly. (b) Shilling development's spatially correspondent subsea HV manipulator system. (c) Remo~ec's RM-10A robotic manipulator system slave asse~'~bly with booting. (d) Merpro Limited's rate manipulator M~R 1066.

Robot applications in nuctcar po:~cr phmt>
(c)
Fig. 3. Continued

I0 F .E . GELHAUS and H. T. Rov-~x
Fig. 3. ContLnued
To a lesser extent, the utility industry is evaluating airborne robot technology for the many miles of power lines that stretch from the plant to the end user. Because they often traverse difficult, remote terrain, inspection of the insulators, and the lines themselves by manned helicopter has proven to be a life-risking business. By mounting inspection equipment on a remotely controlled drone, or on a "line walker" that can negotiate the large insulators (Evans, 1989), the human can perform these tasks from a much less hostile location. Whether or not the use of airborne robots will be cost-effective, even for these utilities with miles of remote lines~ remains to be determined.
2. UTILITY APPLICATIONS
2.1 Identifyin~ applications
Two of the key issues that must be dealt with as any industry begins to consider the utilization of new technology are: discovering and learning about the relevant existing capabilities; and selecting from within that available capability the subset that meets the demands of the tasks to be accomplished. Each human task must be evaluated to determine if augmenting those activities (e.g., by using an electromechanical device) is feasible and cost-effective. And, perhaps more fundamentally, when the new technology being considered impacts the job content of work currently being done by humans, the personal feelings and those of the employee unions must be accounted for.
A good example of dealing with these issues is embodied in the activities at Three Mile Island Unit 2 (TMI-2) following the 1979 accident (Pavelek, 1985; Ciefer, 1985, 1987, 1988; Merchant and Tarplnian, 1986). The need for robots was immediate, and the environ- ~ent in certain locations hostile to the point of excluding human entry. The severity of

Robot applications in nuclear powcr plants I. [
that incident offered a unique and important opportunity for rapid robotic technotog£ca[ development (Pavelek, 1985; Roman, 1988). With a w[de variety of radiologica[ hazards, TMI-2 served as a realistic test bed, providing robot operating experiences that were fed back to the manufacturers as the bases for new/improved robotic designs (Schwartz, 1989). From the standpoint of robotics, one of the "lessons learned" was that a greater deKree of utility-manufacturer interaction to establish design specifications or to adapt/modify existing technology is required to best serve the power plant robotic needs of the utility industry (Roman, 1988b).
Fig. 4.
(a)
Wheeled mobile robotic systems. (a) Remote Reconnaissance Vehicle (RRV-l),built by Carnegie-Mellon University for use at Three Mile Island, was the first teleoperated device to be lowered into the containment building's basement level. Following two successful surveillance missions, RRV-1 was subsequntly modified to perform sampling and cleanup tasks. (b) Remotec's three-wheeled SURBOT surveillance and inspection vehicle, built for the Tennessee Valley Authority for use in Brown's Ferry nuclear power plant. (c) Cybermation's three wheeled Synchro-Drive vehicle. The K2A is tetherless and is configured here with a pallet handling arm. (d) ROD, Viking Systems International's six-wheeled decommissioning and decontamination vehicle, with an American Cimflex Company 2311 progranunable industrial robotic arm.

[2 t-. I-{. ( h i H ~ I , , .rod t l . T. R,)'.i~,'<
| i ̧ ̧4
i'< :~ ? ....
~S ¸
Fig. 4. Continued

Robot appli~;ation,, in nuclc~lr [~,~. ' r p lant- i
Fig. 4. Continued
2.2 TMI-2 cleanup
EPRI participated in jointly funded programs supported by the utility (GPU Nuclear Corporation), the U.S. Department of Energy, and the state of Pennsylvania's Benjamin Franklin Partnership. Table 3 and Figure 8 surmmarize the teleoperators used at that site (Pavelek, 1987). The initial devices, SI$I and FRED, provided experience with the adapta- tion of available robots to specific needs. The lessons learned prompted the design and development of the Remote Reconnaissance Vehicle (RRV) (Whittaker, 1985). Several "bolt-on" work packages were subsequently completed to support the recovery operation.
In contrast to the inadequate experience with FRED, LOUIS (loaned to the utility by the DOE) proved to be fairly adaptable to a rather diverse set of tasks. However, LOUIS-2 had to be fabricated for grout removal because none of the existing vehicles could negotiate the 19-inch-wide clearance to get into the cubicle where the work was required.
MOOSE (Lefkowitz, 1985) was designed for but not put into service at TMI~2. It has been successfully employed at the West Valley Demonstration Project, and has more recently completed a large amount of scabbling at the Indian Point Nuclear Station.
The Remote Work Vehicle (RWV) is truly a "workhorse", with capabilities almost coo extensive to list (Whittaker and Champeny, 1987). The RWV is at TMI-2, but has not yet been used in the cleanup operations.
2.3 Utility applications
The robot activities at TMI revealed the importance of establishing a strong flow of information from utilities (who best know the needs) to the commercial robot companies (who best know how to design to meet those needs). In 1986, the Utility/Manufacturers Robotic Users Croup (U/MRUC) was formed to provide "a forum where user needs and manufacturers' technology can be brought together to identify new application areas, to propose develop-

l-I F . E . GH.H.~t,S and H. T. RoM.~'~
men~ of new equipment, and to assess the cost-benefit potentials of robotic technologies" (Meieran et al., 1987). At the time the group was formed, only a few utilities were committed to robotic planning. Today, there are approximately 20 utility members, including many who have established a special utility company "task force" to evaluate robot applications.
The sequence and content of the steps to determine utility robot applications has evolved from the experiences of these task forces (Roman et al., 1986, and Trovato, 1988). Plant personnel are initially interviewed to determine the jobs/tasks that are likely candidates for robot participation. These lists are always extensive and, at the point of their development, the entries have no priority status. Each utility company views/groups the candidates using their local perspectives, but such lists can usually be distilled into the basic categories shown in Table 4.
ii i T
Fig. 5. Tracked mobile robotic systems. (a) Advanced Resource Development Corporation's SURVEYOR surveillance~inspection vehicle. Tetherless, it can operate for three hours at full load. (b) The Andros MK V, from Remoter, has a manipulator maximum lift capacity of 35 ib at 66 in. (c) The United Kingdom's Atomic Energy Authority Laboratory at Harwell has produced SPIDER, a four-tracked, tethered, teleoperator controlled mobile vehicle.

Robot applications in nuclear pov.er plants 15
Fig. 5. Continued

I+, f+. E. ( . b t .H \t"., :.tad }I. l ' . R~)',,I+',.\
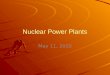
Fig. 6. ROBIN. This experimental system was produced by Odetics, Inc. and used by researchers at the Savannah River Laboratory to develop and test a wide variety of nuclear environment applications.
The fundamental message of this process is quite evident: don't count on one robot to be the answer to all applications. Whether designated 'army', 'family', 'tool kit', or 'staff' (Gelhaus, 1985), a composite of robots is required to satisfy the typical spectrum of applications items, and this demands diverse capability of robot computer, sensor, and mechanical systems.
For each of the high-priority applications, a value assessment is completed. This always involves quantitative cost items, but can also include qualitative, utillty-specific considerations as well. Table 5 summarizes the economic factors that one utility uses to evaluate the introduction of robots into the nuclear plant work force (Roman, 1988).
This logic sequence, or a similar equivalent, has been experienced by all of the utility robotic "task forces" as they developed a plan foc the introduction of robots into their company's work place. Implicit in Table 5 is the assumption that a robot system is

Roho[ application~ in nudeur po~er phmts 17
available for the intended application. However, since that is frequently not the case, the costs for robot design and the schedule for development often become part of the value assessment, and their inclusion can markedly reorder the priorities.
A methodology has evolved to deal with this need-availability dichotomy. As will be evident~ if pushed to its extreme, it becomes burdensome and nonproductive. If used wisely, it introduces order into a complex multiparameter decision process.
3. ROBOTIC APPLICATIONS METHODOLOCY
3.1 Task analysis
Human factors engineers have established a variety of job analysis methodologies (Geiwitz, 1988). SimpLy, everyone's job consists of a set of tasks. For example, 'repair centrifugal air compressor' might be one task to be completed by a member of the plant mechanical maintenance staff. The action steps that must be performed to complete the task (the task elements) are listed in detail. For the above repair task, this could include elements like: remove coupling guard; remove coupling; remove piping. One or more of the following may also be included with each task element:
Planning/scheduling, Work site preparation~ Necessary tools and equipment,
i
Fig. 7. Small (Mini) remotely operated vehicles (ROV's). (a) Mini Rover M~K I, Deep Sea Systems International's 50 ib inspection vehicle, can operate tethered to depths of 500 ft. (b) The Phantom 300 XTL, a product of Deep Ocean Engineering, has a manipulator with a 60 Ib lift capacity and provision for a 150 gpm underwater vacuum interface. (c) General Electric's minisubmarine, used to check welds in submerged, highly radioactive nuclear reactor components, is equipped with a high-resolution TV camera capable of optically resolving a wire thinner than a human hair.

lS F . E . Gce.t.HAt..'S and H. T. R~o'-IA:~
Fig. 7. Continued
Applicable technical manuals, Plant/regulatory requirements, Interpersonal interfaces, Safety considerations, and/or Required plant/system operating mode.
Note that the methodology up to this point is not oriented towards robot systems. In fact, human factors personnel would complete this same task element analysis to evaluate worker proficiency or task efficiency. Since numerous nonrobotic improvements can be revealed by this process, completing a job analysis can have values that go far beyond the one discussed here.
The next step is to repeatedly ask, "Is it possible that a robotic device could either aid or replace the human in the performance of this activity?" Typically, each utility task group member completes such an evaluation; these opinions are then considered by the group as a whole, to evolve a single conclusion for each task element. There is no judgment at this time as to whether robots exist to meet the task element's needs, or even whether the technology is available to produce the required system. The single judgment is whether or not the use of an electromechanical device will minimize the time humans spend in working in hostile environments.
3.2 Robot characteristics
Having located those task elements where robot usage appears beneficial, the methodology focus now turns to the definition of the robotic characteristics required by each member of this task element subset. Suppose the task is to remove the flange from the steam generator, a preparatory event to having humans enter to install the nozzle dam plu~s and later the inspection/repair robot. As each of the task elements ace considered, the robot's characteristics would be determined by responses to questions like the following. As an example, this list is not all-inclusive.

Robot applications in nuclear power plants t9
Fig. 7. Continued
Mechanical Subsystem
Transporter
What are the dimensions of the unobstructed access route to the flange location? Is the access route flat, or are there stairs? How far is the flange above the horizontal platform? What is the horizontal platform surface made of, and what is its load capacity?
What are the dimensions of the unobstructed workspace near the flange? What is the weight of the flange?
Manipulator & Tools
• What is the weight of the flange? • Is there a lifting hook on the flange? • What is the diameter of the bolt circle? • Are the bolts free to turn?

"!J F . E . GLLH",L S Jnd H. -[. R~,,,t,,,:~
What is the breakaway torque? What is the closure Lorque? What are the shape and dimensions of the nuts? What is the gasket made of? How can the gasket be manipulated?
Ho~ wiLL the work be shared between the manipulator and the tools? WiLL movemen~ of sensors be required?
(a)
Fig. 8. Devices developed for the cleanup of TMI-2. (a) Pentek's MOOSE scabbles concrete, employing such an efficient vacuum system that humans do not need respirators to work adjacent to the vehicle. (b) SISI, a Microbot robotic arm fashioned to a two-tracked transporter by the Westinghouse Hanford Company, assisted in the initial surveillance around the makeup water system and purificaton demineralizer. (c) R~2 (Remove Work Vehicle), a four-wheeled, tethered, teleoperator heavy-work system fabricated at Carnegie Mellon University under the direction of W. Whittaker, employs a master/slave arm (75 lb) on the end of a tilting/telescoping boom (12 ft horizontal, 25 ft vertical reach envelope). (d) See Figure 4a.

Robot :lpplication~ in nuclctLr p~.,~cr phmt~, ! i
(b)
Fig. 8. Continued
Sensors
E n v i r o n m e n t a l
• What measurements a r e needed , and to what a c c u r a c y ? • Shou ld some o f t he v i d e o cameras be on t e t h e r s so t h e y can be se t f o r more
g l o b a l wo rkspace v i e w i n g ?
Manipulator
• is 3-D vision required? • Is force feedback required?
Will proximity probes be required to avoid collisions?

22 F . E . GEt_H.~t:s and H. T. Ro~IA~
Fig. 8. Continued
Control
How w i l l the m a n i p u l a t o r / e n v i r o n m e n t a l sensors be used to c o n t r o l the manipulator/transporter? WiLl joint encodecs be monitored, or will the manipulator use end-point control? WiLL the robot be tethered?

Table 3.
Robot applicationsin nuclear power plants
Teleopera tors developed for the c leanup/ recovery a c t i v i t i e s at Three Mile Island Nuclear Station Unit 2.
23
DEVICE NAME DESCRIPTION OF USE
SISI (i)
FRED (1)
RRV with bo l t - on work packages on six-wheeled transporter
LOUIS
LOUIS-2 (i)
MOOSE (I)
RWV
Radia t ion measurements, video inspections, contamination sampling
Decontamination flushing
Video inspections Wall core sampling Radiation surveys Sediment sampling, pickup, and transfer Decontamination flushing Concrete (debris) removal Dismantling of structures Robot cleaning
Debris removal Radiation surveys Placement of cameras and flushing equipment Contro l steam vacuum decontaminat ion system
Scabble contaminated grout in f l o o r s
Scabble contaminated concrete floors
Manipulate tools (drills, saws) Debris removal Core-bore concrete samples Manipulate flushing equipment Video and radiation surveys Dismantling of structures
(I) See Figure 8.
Table 4. General utility robot application categories.
CATEGORY EXAMPLES
Monitoring
Surveillance
Inspection
Maintenance
Radiation levels, temperature and relative humidity, noise, equipment status verifications (vibratlon/leaks)
Security, observation of workers in hazardous a r e a s , meter reading t rends
Valve orientation, pipe/tube x-raying, heat loss paths, weld NDE
Valve r e p a i r , f i l t e r changing, equipment / tool t r a n s p o r t , sandblascingp p a i n t i n g , tank/pool c l ean ing , a sbes tos removal, welding
Accident response F i re f i g h t i n g , s p i l l c leanup, f o re i gn ob jec t retr ieval , personnel i n j u r y ass is tance

24 F.E. GELHAUS and H. T. ROMAN
Table 5. Value assessment factors for nuclear utility robotic applications.
SAVINCS
Reduced personnel exposure to radiation and Co physical hazards Reduction in manhours Reduction in crew size Reduction in work injury (improved worker safety) Repeacahillty of job performance Savlng= in man-hours for health physics monitoring Reduction in safety equipment, hardware, laundry, and
instrumentation Reduction in radioactive waste Performing multiple casks in a work environment with the plant
'at power' (reduction of plant downtime)
EXPENSES
Purchase price of robot Site-specific installation Robot operation and maintenance Robot utilization (single/multiple use) Operator/technician training Decontamination expenses in moving robot around plant Robot support staff
Computer
• Will the computer be on the robot, or in the control console? • What are the required data transfer capabilities, and what is the data transfer
rate? • What level of fault tolerance is needed? • What aspects of robot operation are to be completely under computer control? • Is a backup computer necessary?
It is obvious that many of these questions interrelate. Determining the robot characteristics is a joint effort between utility staff, who have an intimate knowledge of the cask elements (the plant), and specialists/consultants, who know the capability and performance of robotic systems.
Analyzing the task elements for the task of flange removal may result in the finding that more than one robotic device is required. In addition, similar analyses for flanges at other locations in the plant may reveal needed robot/cool characteristics chat are a repeat of those determined for this steam generator activity. Recognizing these duplicative needs offers the potential for tremendous cost savings.
The utility is now ready to present the groupings of the needed robot characteristics to the robot manufacturer. The manufacturer will then cake the lead in developing conccepcual designs or will show how a current product offering fits chose needs. In either case, chls will provide the utility with a key parameter, the purchase price of the robot, chat will enable the value assessment (Table 5) co be completed.
3.3 Value assessment
VaLue assessment is a formal method to assess the relative worth of each solution alternative thac confronts the decision maker. Ic is a descriptive decision-making aid chat decomposes and describes the decislon-making process (comparison of alcernaClves), and points out what experts agree is the best solution alCernatlve (Humphress and Lewis, 1982).

Robot applications in nuclear power plants 25
The experts in this case are the utility staff, who best know the details of each Cask elementp the members of the ucility's robotic cask group, who are charged with synthesizing the assessment information, and the manufacturers who supply the equipment. The d e c o m p o s i t i o n i s a f f o r d e d by a l i s t such as Chat shown in Tab le 5, which in v a l u e a s s e s s - ment p a r l a n c e a re a t t r i b u t e s . (An a t t r i b u t e i s a c r i t e r i o n which i s i m p o r t a n t to an e v a l u a t i o n o f a s o l u t i o n a l t e r n a t i v e . ) Ic must be no ted t h a t no v a l u e assessment would be required if the use of robotics offered the only way to safely perform the task.
A methodology is useful if it yields beneficial results over a wide range of intensities of application. Such is the case here. A rigorous task analysis can be of tremendous benefit, robocically and otherwise; but if that degree of rigor were applied to ALL ma in tenance casks , the sheer we igh t o f t he p rocess would s i g n i f i c a n t l y impact chose b e n e f i t s . D e f i n i n g the r o b o t ' s c h a r a c t e r i s t i c s f o r a t a s k e lement can be a v e r y e d u c a t i o n a l e x p e r i e n c e i n r o b o t i c s . Ye t , i t would no t be w ise to c a r r y cha t d e f i n i t i o n process Coo far before bringing in the commercial expert. A thorough value assessment requires several iterations of the results (Delphi process), allowing the experts a 're-vote' based on the composite result of the prior analysis. Besides there not being enough time for this iteration, the methodology applicant must continuously be aware that "hidden attributes" may suddenly arise to reorient the 'rigorous' conclusion.
3.4 The robotic staff/cool kit family
The described methodology can reveal thac several distinct robotic devices will be of value when used to help minimize human exposure to hostile environment. The broader the application of the above methodology, the better the assurance that when a robot is purchased/developed, it will possess the capability required by several task elements.
However, no member o f a human s t a f f i s expec ted to be a l l t h i n g s f o r a l l o c c a s i o n s , and t h a t c o n c l u s i o n a p p l i e s e q u a l l y w e l l to the r o b o t s chat make up t h a t t o o l k i t . Jus t as the home t o o l box i s the sum o f d i s c r e t e t o o l s , so i t i s w i t h an optimum power p l a n t r o b o t s t a f f . We do many d i f f e r e n t t h i n g s w i t h a g i v e n c o o l , buc have o f t e n r e a l i z e d t h a t an a l t e r n a t e shou ld be s e l e c t e d i f we a re co ma inca ln the s k i n on ou r k n u c k l e s . And, we can e x p e r i e n c e f u r t h e r s a v i n g s i f we demand modu la r r o b o t i c sys tems. S ince the r o b o t i s a coo l f o r power p l a n t m i s s i o n s (Wohlmut, 1987) , i t can be c o n s t r u c t e d l i k e the m u l t i p u r p o s e home s c r e w d r i v e r : a b a s i c c a p a b i l i t y w i t h add-ons cha t p e r m i t a v a r i e t y o f s p e c i f i c work f u n c t i o n s . As long as the d e s i r e d t a s k s a re s u f f i c i e n t l y s i m i l a r and w i t h i n the o v e r a l l pe r fo rmance d e s i g n o f the r o b o t , subsystems can be ( r e ) a s s e m b l e d i n a number o f ways Co p e r f o r m many r e l a t e d f u n c t i o n s . Good subsystems e n g i n e e r i n g i s the key to s u c c e s s f u l modularity (Roman, 1985).
4. ROBOT APPLICATION LIMITING FACTORS
Ano the r p a r a l l e l t o the human s t a f f a t a power p l a n t r e s t s w i t h the r e a l i z a t i o n t h a t v a r i o u s c o n s t r a i n t s a re p r e s e n t thac w i l l l i m i t ( o r even p r e c l u d e ) a r o b o t i c s t a f f f rom g e t t i n g the work done.
4 .1 Geomet r i c c o n s t r a i n t s
The con ta i nmen t b u i l d i n g a t a n u c l e a r power p l a n t i s a p h y s i c a l l y conges ted e n v i r o n m e n t . C e r t a i n a reas a re a c c e s s i b l e o n l y by l a d d e r , o r upon the e r e c t i o n o f s c a f f o l d i n g . And the work s i t e i t s e l f can be encumbered because o f n e a r b y p i p e s , t a n k s , o r c a b l e t r a y s . S n a k e - l i k e r o b o t s (Asano, 1984) and d e v i c e s w i t h e x t e n d i b l e ' n e c k s ' ( H a r v e y , 1985) have been b u i l t , and t hese p r o v i d e access i n t o some remote a r e a s . But coday)s r o b o t i c c a p a b i l i t i e s w i l l no t f i c i n t o most o f t h a t vo lume) and the r o b o t rep lacemen t f o r the human)s b o a r d - o n - a - p i p e work p l a t f o r m i s a d e v i c e o f the f u t u r e .
By conCrascp most a u x i l i a r y b u i l d i n g s c o n s i s t e n t l y have more open s p ace . Access to numerous hea t exchangers~ and to the g e n e r a l p i p i n g p pumps and v a l v e s can be accomp l i shed by many o f the c o n T n e r c i a l l y a v a i l a b l e r o b o t s . Howeverp the radwasCe a r e a o f t hese b u i l d i n g s remains a space c h a l l e n g e t h a t has seen the use o f o n l y a few r o b o t i c systems ( L e f k o w i t z and DelceCe, 1988) .

26 F . E . GELI4AUS and H. T. ROMAN
4.2 Contamination
The nuclear power plant is divided into many discrete areas, and a considerable effort is put forth to prevent transfer of radioactivity across these boundaries. Robotic tools can be bagged and carried, or simply left in a controlled area. But how will a mobile robot cross the step-off pad? The wheels and tracks of rolling vehicles may be contami- nated. A walking robot could have its own set of plastic booties, but will it be necessary for a human to help don and remove them? And if the body of a mobile system carries contamination, will a special transport box be required to meet the robot at the pad?
At TMI-2, when the RRV was removed from the lower containment level after a surveil- lance mission (using a crane hoist), the device was held just below the upper floor and decontaminated using a special high-pressure spray ring. This process was successful in removing radioactivity, but is not a practical one for an operating power plant. Today's commercial robots can be sprayed clean, but there are no robot shower rooms within the power plant. Robot decontamination requiring direct human intervention could result in personnel exposure, partially negating one of the reasons for deploying the robot in the first place.
Concern of contamination can be a strong impediment when considering the use of multipurpose robots to roam the plant for monitoring, surveillance, or inspection purposes. It is, therefore, an influential issue in robot design. Today's power plants were not designed with the robot in mind.
4.3 Radiation hardening
Humans can be restricted in the duration of work in an environment due to heat stress, radiation, and noxious fumes or, as was the situation at TMI-2, prevented from entering certain areas at all because of the 'hostile' severity. The use of robots instead of humans in hostile environments can have these same restrictions. Being a computer, the robot usually contains many CMOS radiation-sensitive circuit components that can limit the duration of its stay at the work site. This can be the result of chronic exposure or of a one-time situation such as occurred at Chernobyl (Yurchenko, 1987, Adamov and Yegorov, 1987, and Meieron, 1988). Reports from early power plant use indicated that ionizing radiation caused an annual performance degradation of i0% for nonhardened electronic circuitry. A cumulative dose of 30,000-35,000 R was recently experienced before significant electronic degradation was noted in an underwater robot.
Defense research has provided great advances in radlation-resistant components, but the use of gallium arsenide technology increases the cost of the robot. This can become a design issue as well, because one way to limit exposure to critical components is to locate them within the remote control console rather than on-board the robot. When completing the value asesssment, account must be taken under "maintenance" for the expense of periodic replacement of critical boards and components.
4.4 Robot maintenance
The introduction of robots will add additional complex electromechanical systems to the already demanding list of power plant maintenance activities. Engineers/craft personnel can be sent to courses on, say, valve motor operator operation and maintenance, but there currently is no similar educational environment dealing with robots. The intro- duction of a robot for power plant maintenance (Rohrabacher, 1987) brings with it the need to train maintenance personnel. As has been the case with much of the major plant equip- ment, it will probably be most effective initially to have the original robot equipment manufacturer complete a majority of the repair work. However, past experience indicates that it will be necessary to train utility crews in order to optimally perform this maintenance.
4.5 Failure recover 7
Successful deployment of robotic devices into hostile environments demands extremely high device reliability. The failure of a robot at a hostile work site would require humans Co enter the area to fix or remove the robot, as well as the complete the job. For

Rol' .- t ~lpplication_,, in nuclear po~.~.cr plan~,, _"
smaller robotic systems, removal could be done by hand. For Larger mobile system, special rigging or transport devices might be required. Currently, no such 'robot wrecker' capability exists.
Failure recovery is definitely a design issue. [f a tether is to be utilized as a recovery rope, then it must be mechanically designed to perform that function. To the extent possible, larger devices should be designed with a modular transporter, allowing major replacement in lieu of detailed in situ repair.
4.6 Resulations
No robot that has a propensity for failure will have a long use life at a power plant. The plant staff does not want complex machines with poor reliability. However, failure is inevitable. But, this is true for all of the components and systems in the power plant. Plant operational systems come under the scrutiny of the U.S. Nuclear Regulatory Commission, who demand that the plant have the capability for safe recovery from a wide variety of failure conditions.
Robot capabilities of strength and speed are superhuman, but the intelligence to know when a compromising situation arises is nowhere close to even the poorest of human capa- bility. Robot safety is a concern, and several humans have been injured, some seriously, by fixed-place robots in manufacturing environments (Parsons, 1985). Regulations exist for that situation (Parsons, 1986b), but no equivalent guidance is available for robot use [n power plants.
All of the electromechanical devices we use carry a set safety precautions, and it logically follows that regulations for the safe operation and shutdown of robots intended for plant use is inevitable.
4.7 Robot-friendly plants
Today's power plants are not robot-friendly. In addition to the basic geometric constraints and contamination concerns, matters such as the shape of the nut on the flange bolt and the latter's configuration as a stud or through-hole bolt can make robot usage difficult. Thus, even if there is sufficient access and laydown space around a component, the component's detail may limit or preclude robot work.
Power plant stair treads are sometimes made by bending a sheet of metal. This process leaves a rounded front edge, making it very difficult for a robot to gain track-hold.
Valves are intalled with their stems oriented upward, downward, or sideways; this orientation variation can make it very difficult for a robot to service all valves of a given type, even though it has the tools and capabilities for that type.
Many of these difficulties can be designed out of future power plants. Fortunately, most of the design considerations that will enable more optimum use of robots are also those that will improve the environment as a human work space.
5. ROBOTS FOR FUTURE PLANTS
The output and reliability of some of today's power plants have been improved through the introduction of robots. Even greater benefits will result when a new plant design includes the requirements of the robot work force. However, though future plants must be made more robot-friendly, the optimum use of these systems will not be achieved unless the robots are made m o r e plant-friendly. Radiation-hardened electrical components, decontaminability, and contamination disbursement have been mentioned, and are only three of the aspects of the robot that must be designed with the plant in mind.
Some of the required plant friendliness will no doubt come through the use of artificial intelligence. The robot's computer will have more reasoning capability, allowing the device to make decisions about its path, its progress on the task element, and to decide when the safety of humans or equipment is an issue. SHAKEY (Hilsson, 1984), SIR (Tech News, 1987), HERMIES (Weisbin, 1986), and TERRIGATOR (Whittaker, 1985b) are among the

", F . h . ( .h- I ~! x~ ", ~md t t . I R~,x! ',,,
several A[ software/hardware experimental test beds paving the way to the future of havin~ robot 'thinking' capability. (See Figure 9.) However, outstanding as these achievements are, they typically demand the use of bulky, expensive compuners, and still represent very rudimentary levels of capability.
A :easoning robot will require improved input data to successfully "think." ]-D vision systems improve manipulator and transporter dexterity for a teleoperated system, but Al-based robots will demand a laser range finder (or equivalent) to provide distance/ dimension data. The copious amount of data from such sensors will increase the on-board
Fig. 9.
(a)
Robots for AI software evaluations. (a) TERREGATOR, a testbed for autonomous navigation research at Carnegie Mellon University's Field Robotics Center, is a tetherless vehicle with omni-directiona! mobility in moderately rough terrain. (b) HERMIES IIB, with a power-only tether, has an IBM 7532 system onboard, equipped with 4 NCUBE boards. It communicates via an 8 Mbaud Bit-3 parallel link with a VME bus. Configured by Oak Ridge Laboratory for the U.S. Department of Energy. (c) The AI Center ar SRI International has developed the SHAKEY autonomous robot. Tetherless, it has PDP-10 and ?DP-15 microcomputers onboard. When originally completed in 1969, this robot was the first to be conro!led primarily by programs chat reascn.

[~.~.*t',~.,t : lppl ic : t t ions in nu,: lc:lr p o v . c r pl.~'~ ~, 2 ~.~
I
Fig. 9. Continued

:,i} F . E . ( } [ L i l ',~ "~ and H. T. R{~x~x-.
computer requirements. And then, these power-consuming systems will begin to push the capacity of lightweight energy storage systems. A smart robot ~ill not be [ethered, and its value to the power plant will decrease signf[cantly if [t spends ~oo much time looking for and/or parked at its charging stations. Current battery systems allow about six hours of surveillence, but that duration decreases significantly if the robot also performs work (e.g., lifting) tasks. Future power plants must include strategically placed charging stations for untethered systems, but the abi[ity to complete significant work tasks rests with much-improved energy storage devices.
Significant amounts of power can be tethered to a mobile robot (Carlton, 1989). Although solving the problem of carrying significant power on-board, the in-plant concern becomes tether management. The future plant must also have power outlets distributed throughout the plant that the tethered robot can connect itself to. Ample power is available for an untethered, low-power-consumption trip to the work area, but tethers can become too long if run from the control console location to the job site. Future plant design should account for this with cable runs, including containment penetrations and outlets to help assure full-charge passage through containment interlocks.
6. CONCLUSIONS
Robots have been in use at power plants for many years. Today's computer technology, especially the lower power consumption and sma[l size, allows a new generation of power plant robotic systems to be designed. The national goal to develop robots that can help in the construction and maintenance of a space station (O[sen and Quinn, 1987) will signifi- cantly enhance the robotic capability. Manufacturers now offer the electricity generating industry. The challenge to utilities is to focus more of their resources towards acquiring the basic skills and understanding of this emerging technology, in order to influence future design and performance and to position for optimum use of robots as tools for power plant missions.
REFERENCES
Adamov Ye.O. and Yegorov Yu.A. (1987) Development of Robotic Systems for Nuclear Applications Including Emergencies. Proceedings of the ANS Topical Conference on Robotics and Remote Handling, Pasco, WA, April.
Asano K. (1984) Control System for a Multi-Joint Inspection Robot. Proceedings of the Topical Meeting on Robotics and Remote Handlin~ in Hostile Environments, 375, Catlinburg, TN.
Asimov I. and Frenkel K. A. (1985) Robots, Marchines in Man's Image, Harmony Books, New York.
Bartholet T. C. (1984) ODEX-I, A New Class of Mobile Robotics. Proceedings of the Topical Meeting on Robotics and Remote Handling in Hostile Environments, Catlinburg, TX, April.
Bartholet T. C. (1989) New Developments in Intelligent Machines. Autonomous Systems and Robotics Conference, Pasadema, CA, April.
Baum J. W. and Matthews G. R. (1985) Compendium of Cost-Effectiveness Evaluation of Modifications for Dose Reduction at Nuclear Power Plants, USNRC Report NUREG/CR-4373.
Burdick J. W. (1989) Analysis and Control of Redundant Robot Manipulators. Autonomous Systems and Robotics Conference, Pasadena, CA, April.
Busby R. F. (1987) Low Cost ROVs - Some Early Returns. Sea Technology, I0.
Busby R. F. (1987) Undersea Vehicles Directory - 1987, Busby Associates, inc., Arlington, VA.
Byrd J. (1988) Mobite Robotics - R&D at Savannah River Laboratory. ASEE Annual Conference Proceedings, Portland, OR, June.

Robot applications in nuclear power plants 31
Cannon R. H. Jr. (1985) Rapid Precise Control of Nonrigid Manipulators. National Science Foundation Workshop on Intelligent Robots: Achievements and Issues, Menlo Park, CA, November.
Carlton R. E. (1989) The Completion of the ODEX III Nuclear Power Maintenance Robot, Instrument Society of America Conference, Pato Alto, California.
Conkling T. W. (1986) Robotics Databases. Robotics Engineering, 18.
Evans J. (1989) Robotic Literature. Transitions Research Corporation, Danbury, CT, February.
Fischetti M. A. (1985) Robots do the Dirty Work. IEEE Spectrum, 65.
Fisher S. et al. (1987) Virtual Interface Environment for Telepresence Applications. Proceedings of the ANS Topical Heetin$ on Robotics and Remote Handlin$ in Hostile Environment, Pasco, WA, April.
Flora P. C. (ed.) (1984) Robotics Industry Directory, Technical DataBase Corp., Conroe, TX.
Giefec D. L. (1985) Development of RPV for Hazardous Area Service. 12th Topical Conference of Reactor Operation Experience-Maintenance and Modifications for Availability and Efficiency.
Giefer D. L. and Bengel P. (1987) Aggressive Remote Tooling Development. RI/SME/ANS Remote Tooling and Robotics International Meeting.
Giefer D. L., Fillnow R., and Bengel P. (1988) Criteria Development for Remotely Controlled Remote Devices at TMI-2. Presented at the 1988 ANS Winter Meeting.
Geiwltz J. et al. (1988) Handbook for Evaluatin 8 the Proficiency of Maintenance Personnel, Section 2, Electric Power Research Institute Report EPRI NP-5710.
Gelhaus F. E. (1985) Nuclear Power Plant Robotic Staff: An EPRI Perspective. TANSAO 49, 306.
Celhaus F. E. (1988) Robots: Tools for Power Plant Mwssions. ASEE Annual Conference Proceedings, Portland, OR, June.
Harvey H. (1985) NRC Surveillance Robot Demonstration Project. Proceedinss of the ANS Executive Conference on Remote Operations and Robotics in the Nuclear Industry, Pine Mountain, CA, April.
Henkener J. A. (1978) Help in the High Lines. Technology Today, SWRI, San Antonia, TX. See also EPRI Report EL-4188, August 1985.
Holland J. M. (1983) Basic Robotic Concepts, Howard W. Sams & Co., Inc., Indianapolis, IN.
Humphress C and Lewis E (1982) A Value Assessment Aid to Complex Decision Making, Electric Power Research Institute Report EPRI NP-2507.
Kobayashi T (1986) Robot News Yearbook 1986/1987, Antenna House, Inc., Tokyo, Japan.
Kok K. (1984) Automated Maintenance in Nuclear Power Plants, Electric Power Research Institute Report EPRI NP-3779.
Larcombe M.H.E. and Halsall J. R. (1984) Robotics in Nuclear Engineering, Craham and Trotman Ltd., London, UK.
Lefkowitz S. (1985) Development of a Remotely Operated Concrete Decontamination Vehicle, Electric Power Research Institute Report NP-4303.
Lewis J. W. (1987) Fundamentals of Mobile Robots, Electric Power Research Institute Course Book.
Mar t i n H. L. and Kuban D. P. ( eds . ) (1985) Teleoperaced Robot ics in H o s t i l e Envi ronments, RI/SME, Deaborn, HI .

32 F .E . G~t.Haus and H. T. Ro~tas
Maslak V. (ed.) (1983) Robot Handbook, SRI International Project 3949, Menlo Park, CA.
McDermott K. J. and Alexander H. S. (1985) Robot Applications in Industry Today, paper 85-Mgt-15. ASME Energy Sources and Technology Conference and Exhibition, Dallas, TX, February.
Meieran H. B. (1987) A Compendium on Mobi[e Robots Used in Hazardous Environments, Electric Power Research Institute Report NP-5060.
Heleran H. B. et al. (1987) The United States Forms the First Robots Users Group. Remote Technology, 35.
Merchant D. J. and Tarpinian J. E. (1986) Post-Accident Recovery Operations at TMI-2. Proceedings of the Workshop on Requirements of Mobile Teleoperators for Radiolo~ical Emergency Response and Recovery, ANL/EES-TM-291, U.S. Department of Energy, February.
Meystel A (1985) A Structure of Intelligence for Unmanned Robots. Proceedings of the ANS Executive Conference on Remote Operations and Robotics in the Nuclear Industry, Pine Mountain, GA, April.
Moore T. (1984) Robots Join the Nuclear Workforce. EPRI Journak, November.
Nilsson N. J. (1984) SHAKEY the Robot, Technical Note 323, SRI International, April.
Nor S. Y. (1985) Handbook of Industrial Robots, John Wiley and Sons, Inc., New York, NY.
Olsen R. E. and Quinn A. (1987) Telerobotic Orbital Servicing Technology Development. Proceedings of the ANS Topical Conference on Robotics and Remote Handling, p. 158, Pasco, WA~ April.
Oppenheim I. J. et al (1987) Robotic Task Plannin~: Domain Modelin~ and Geometric Reasoning, Electric Power Research Institute Report EPRI NP-5524.
Parsons H. M. (1985) Robotics and the Health of Workers. Proceedings of the International Scientific Conference on Occupational Health and Safety in Automation and Robotics, Kitakysushu, Japan.
Parsons H. M. (1986) Robotic Vehicles: A Review, Human Factors in Organization Design and Management, p. 29, Elsevier Science Publishers B.V., North Holland.
Parsons H. M. (1986b) Human Factors in Industrial Robot Safety. Journal of Occupational Accidents 8, 25-47.
Pavelek M. D. (1985) Use of Teleoperators at Three Mile Island 2. Proceedings of ANS Exec. Conf. on Remote Operations and Robotics in the Nuclear Industry, Atlanta, Georgia.
Pavelek M. D., Roman H. T., and McDermott K. J. (1986) Tomorrow's Mobile Robots in Today's Nuclear Power Plants, Washington, D.C.
Pavelek H. D. (1987) TMI-2 Remote Cameras, Teleoperators, and Other Potential Nuclear Applications. Nuclear Safety 28, No. 3, 341.
Rohrabacher A. et al. (1987) Considerations in the Development and Implementation of a Maintenance Robot for Nuclear Power Facilities. Proceedings of the ANS International Heetin~ on Nuclear Power Plant Operation, Chicago, IL, July.
Roman H. T. (1985) Robotic Applications in the Electric and Gas Utility Industries, paper 85-Mgt-18. ASME Energy Sources and Technology Conference and Exhibition, Dallas, TX, February.
Roman H. T. et al. (1986) Utility Robotic Planning: Case Studies. Proceedings of the Thirteenth Energy Technology Conference, p. 695, Washington, DC, March.
Roman H. T. (1988) The Robots are Coming. Electric Perspectives/winter, 30.
Roman H. T. (1988b) Robots in Electric Power Industry, International Encyclopedia of Robotics Applications and Automation, 394, John Wiley and Sons, Inc., New York, NY.

Robot applications in nuclear power plants 33
Sitverman E. B. and Simmons R. K. (1985) Designing Teleoperated Tracked Vehicles for Nuclear Power Plants. Proceedings of the AN$ Executive Conference on Remote Operations and Robotics in the Nuclear Industry, Pine Mountain, CA, Apr i l .
Schwartz F. L. (1989) Robotic Program Development: Applicable Lessons Learned From TMI-2, Electr ic Power Research Ins t i tu te Report EPRI NP-6521.
Taylor G. M. (1984) EPRI Demo Highlights Various Systems. Nuclear News, December.
Tech News (1987) Roving Robot, Mechanical Engineering, November.
Trovato S. A. (1988) Robot Hunts Sludge and Hoses i t Away, Mechanical Engineering, 66.
Varley J. (Ed.) (1986, 987, 1988) Remote Technology Section of Apri l Issues. Nuclear Engineerin B International pp. 33-45, pp. 34-52, pp. 21-42.
Weisbin C. R. (1986) CESAR Research in Intelligent Machines. Robotics Research Conference, RI/SME Technical Paper MS86-772, SCOTTSDALE, AZ, August.
White J R. (1984) Evaluation of Robotic Inspection Systems at Nuclear Power Plants, NUREG/CR-3717, March.
Whittaker W. L. (1985) Remote Reconnaissance Vehicle Program, Electric Power Research Institute Report NP-4265.
Whittakerp W. L. (1985b) Cognative Robots for Construction, Annual Robotic's Review, Carnegie-Mellon University.
Whittaker W. L. and Champeny L. (1987) Capabilities of a Remote Work Vehicle. Proceedings of the ANS Topical Conference on Robotics and Remote Handling, p. 254, Pasco, CA, April.
Wohlmut T. A. (1987) Robots: Tools for Power Plant Missions, Electric Power Research Institute Videotape NP87-OI.
Yurchenko Yu.F. (1987) The Use of Robot Machinery With Atomic Energy Installations Under Extreme Conditions. Proceedings of the ANS Topical Conference on Robotics and Remote Handling, Pasco, WA, April.