Embed Size (px)
Citation preview
Abs
Wefemusegmirregouterfemuheadscansegmfor fperfoare emeththe ushapfemophyshighand aversymmgrou
KeImpi
1
In mcontophysImpidefojointTomspecphysimpiinva
W3D mthe mCT sWhilsegmof wfuncsegmto sethe treat
Thsegmcan withcolorbonepotensegm
stract
We introduce aur from pelvic mentation dugular shape ar shell. We ov
ur into two rod and anothern to reduce anmentation – a fine contours
formed iterativextracted usinhodology was user and to d
pes, most notaoral-acetabulasicians with a-quality 3D feeffort. Femur
rage volume metric surfaceund truth mode
eywords: Segingements; Hip
Introduct
medical imagiours of organsicians to aidingements (FArmities exist t’s soft tissue
mographic (CTific hip-bone
sicians to dingements as sive procedur
We are motivatmodels of hip most precise rscans come frole providing
mentation is ework for a sing
tions. Our mentation scheegment the femsufficiently at FAIs. here are numbment a femur f
be classified CT imagery (r informatione size, varyinntial presence
menting the f
Seg
a new way toCT scans. The to its prand the varyivercome theseounds of segmr for the bodynatomical sour
rough estimas. Segmentatively, on a slicng the morphodesigned to r
deftly handle ably from defar impingemena new tool thaemur models wr models segm
overlap erre distance of els.
gmentation; ip; Morpholog
tion
ing, segmentans or bones, d in their dAIs) refer to on the hip over time. Se
T) scan allowmodels. Thes
detect the well as to aid
res to correct tted by the mebones for the results for peom the intens
g the mostextremely timgle pelvic scan
goal is toeme which gremur from a p
accurate resul
ber of factors from a CT pel
as either tec(such as low r
n), patient-speng caput-collue of FAI), ofemur (such a
gmentatio
o accurately he femur is a droximity to ting thickness
e difficulties bymentation - ony – (b) pre-prrces of error
ation of a contions of the ce-by-slice baological snakerequire little in
the large vaeformations ants. Our efforat creates patwhile requirin
mented with ouror of 2.71 f 0.28 ± 0.04m
Femur; Femgical Snake
ation can be which can l
diagnosis. Fema source of bones which
egmenting a pws for the crese models canlocations an
d in the plannthe condition. edical need fo
treatment of Flvic bone segive manual la
t accurate me-consuming;
n, even with co create a eatly reduces
pelvic CT scanlts required f
which compllvic scan. Thechnical limitaresolution, artecific complium-disphysealor complicatioas its close p
on of CamGabriel Tell
segment thedifficult targetthe acetabulof its harde
y (a) dividing ne for the femrocessing the (c) two modestour and anotCT volume
asis and contoe algorithm. Onitialization frariation in femttributed to c
rts are to provtient-specific ang much less tur method had
± 0.44% amm compared
moral-Acetabu
used to extrlater be used moral-Acetabuf hip pain whh deteriorate pelvic Compu
eation of patien then be usednd severity ing of minim
r patient-specFAIs. At pres
gmentations frabeling of voxresults, man; requiring hocomputer assis
machine-drithe time requin while returnfor physicians
licate attemptese complicatiations associaifacts and lackcations (suchl angles and ons particularproximity to
m-Type Fles O’Neill, W
3D t for lum, ened
the mur CT s of ther are
ours Our
from mur cam vide and time d an and d to
ular
ract by
ular here
the uted ent-
d by of
ally
cific ent, rom
xels. nual ours sted ven ired ning s to
s to ions ated k of
h as the
r to the
aceof
OproThgreespliksegvalOuovefemconsinMoMáto liesintto meterm
Wcuta lpercomthr
Tbacsegdisdir
2
2.1
Ttheaceaceconfre
Fig
Tfea
Femurs frWon-Sook Lee
etabulum, it’sits osseous tisOur contributocedure whichhe human hip eatly betweenpecially expece FAIs. We rgmentation whlidate our meur solution serlapping regimur-body. Fontours from c
ngular slices orphological árquez-Neila, its stability as in the metho smaller tasksegmentation
ethods stem frms of bone strWe pre-procetting-out portilow-gradient frforming ceimposed of cresholding to fThe structure ckground infgmentation strscussion and rections for fu
Backgro
1 The Hip
The acetabuloe thigh and isetabulum. Betetabular labruntact surfaces
ee operation of
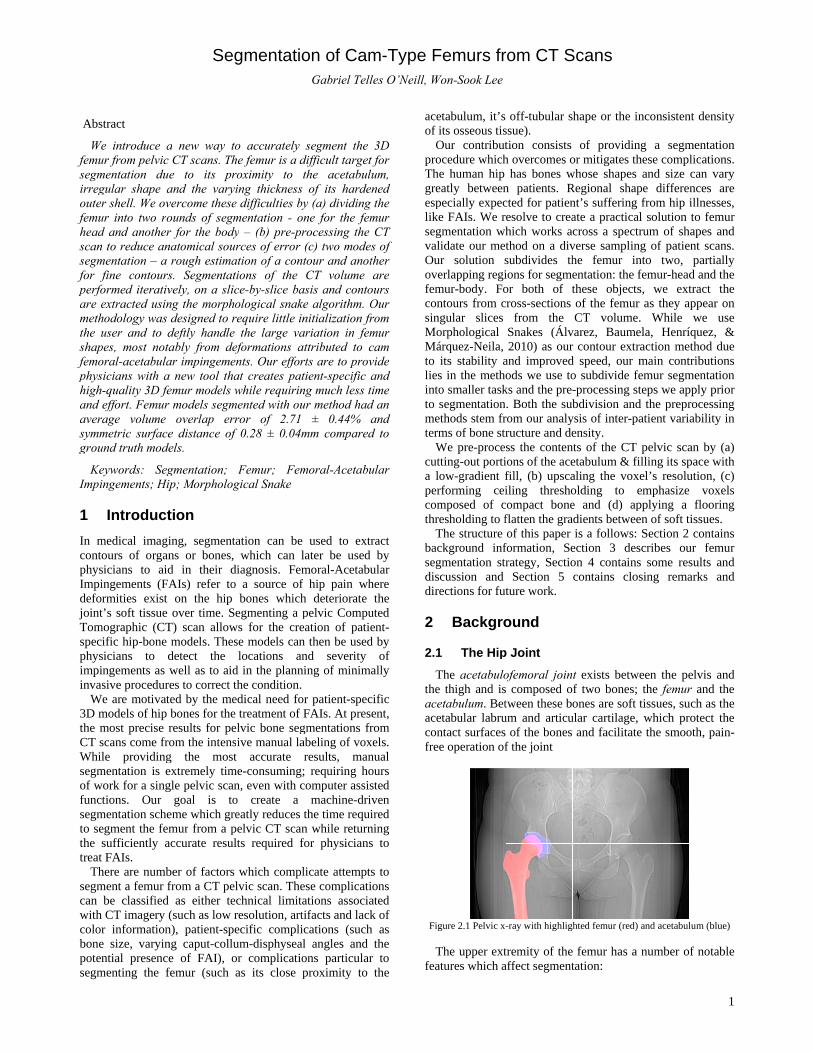
gure 2.1 Pelvic x
The upper extatures which a
rom CT S
off-tubular sssue). tion consists h overcomes o
has bones wn patients. Rcted for patienresolve to creahich works athod on a divsubdivides thions for segmeor both of tcross-sections
from the Snakes (Álv2010) as our
and improvedods we use to
ks and the pre-n. Both the subrom our analyructure and dess the contenions of the acefill, (b) upscailing thresho
compact boneflatten the graof this paper
formation, Serategy, Sectio
Section 5 ture work.
ound
p Joint
ofemoral joins composed otween these boum and articu of the bones f the joint
-ray with highligh
tremity of theaffect segment
Scans
hape or the in
of providinor mitigates th
whose shapes Regional shapnt’s suffering ate a practicalcross a spectrverse samplinhe femur inentation: the fthese objectsof the femur CT volume.
varez, Baumer contour extrd speed, our mo subdivide fe-processing stbdivision and
ysis of inter-paensity.
nts of the CT etabulum & fialing the voxeolding to ee and (d) apadients betwee
is a follows: ection 3 deson 4 containscontains clos
t exists betwef two bones; ones are soft t
ular cartilage, and facilitate
hted femur (red)
e femur has a tation:
nconsistent de
ng a segmenthese complicatand size can
pe differencefrom hip illnel solution to frum of shapeg of patient s
nto two, parfemur-head ans, we extract
as they appe. While weela, Henríqueaction methodmain contribuemur segmentteps we apply d the preproceatient variabil
pelvic scan billing its spaceel’s resolutionemphasize vpplying a floen of soft tissuSection 2 con
scribes our fs some resultssing remarks
een the pelvithe femur an
tissues, such awhich protec
e the smooth,
and acetabulum (
number of no
1
ensity
tation tions. vary
s are esses, femur s and scans. rtially nd the t the
ear on use
ez, & d due utions tation prior
essing lity in
by (a) e with n, (c)
voxels ooring ues. ntains femur s and
s and
s and nd the as the ct the pain-
(blue)
otable
2
The femur head is the rounded end of the femur. Its surface comes in the closest contact with the pelvic bones and can generally be approximated with the shape of a sphere or conchoid
The pit (or fovea) for the ligament of the head of the femur is an indentation in the otherwise spherical surface of the femur-head
The femur body is the tubular shaft which makes up the majority of the femur
The greater trochanter is a large bony-bump at the top of the body, opposite to the femur head
CT images of the femur-head’s subchondral bone composition show large density variations, like a very thin compact shell compared to the much thicker one found in the femur body. Comparatively, regions of the acetabular rim covering the femur head are also noticibly denser.
The hip-joint’s task in the human body is to support upper-body weight- both while standing still and during movement. Hip movement is enabled by the hip functioning as a ball-and-socket (Field & Hutchinson, 2008) where the femur head constitutes the ball and the acetabulum provides the retaining socket.
2.2 Femoral Acetabular Impingement
Hip impingement, or Femoral-Acetabular Impingment (FAI), is a pathological condition where there is a deformity on either of the hip-joint’s bones. This deformity usually manifests itself as a bony-bump on the acetabular rim (Pincer impingements) or the femur’s head-neck junction (Cam impingements) or both. As a result, the hip joint will lose its ideal ball-and-socket shape which causes abnormal contact (impingement) between the femur and acetabulum during normal hip-rotation. In turn, this abnormal contact causes chaffing of the soft-tissue protecting the two bones, deteriorating the integrity of the joint over time. FAI is most often associated with pain during hip flexion, adduction, and the internal rotation of the femur. If left untreated, a FAI can lead to cartilage damage, labral tears, early hip arthritis, hyperlaxity, sports hernias, chronic lower back pain (Hossain & Andrew, 2008) and an eventual hip replacement surgery.
2.3 Medical Segmentation Methods
Medical images are a popular proving ground for segmentation methods as the images are usually full of complex shapes, noise and the extracted shapes have obvious, life-changing uses.
The original energy minimizing curves, or “snakes” (Kass, Witkin, & Terzopoulos, 1987), are perhaps the best known segmentation scheme. Since their introduction in 1987, a number of modifications/enhancements have been proposed. These include the addition of a balloon force operator (Cohen L. , 1991), 3D generalizations of the snake model (Cohen & Cohen, 1993), likening snakes to level-set methods with geodesic active-contours (Caselles, Kimmel, & Sapiro, 1997), increasing the a snake’s capture range & ability to evolve into concavities (Xu & Prince, 1998) and add topological flexibility (McInerney & Terzopoulos, 2000).Model-based segmentation schemes are useful in cases where part of an object’s information is missing. Early cases include Active shape models (Cootes, Taylor, Cooper, & Graham, 1995) and active appearance models (Cootes, Edwards, & Taylor, Active Appearance Models, 1998) based around point distribution models.
Similar to energy-minimizing curves are methods which are region-based rather than boundary-based. A prime example of this is the Chan-Vese method (Chan & Vese, 2001) (Vese & Chan, 2002) which seeks to minimize the energy inside a curve through the Mumford-Shaw functional. At roughly the same time, Diffusion Snakes (Cremers, Schnörr, Weickert, & Schellewald, 2000) were detailed, which used prior shapes along with the Mumford Shaw functional. As an aside, a model-based method which originally used the kernel density information of shape-priors (Cremers, Osher, & Soatto, Kernel Density Estimation and Intrinsic Alignment for Shape Priors in Level Set Segmentation, 2006) was modified to also include intensity-priors or regions inside the boundary (Chen & Radke, 2009).
A number of segmentation strategies have been proposed focusing on the segmentation of femurs from MRI and CT scans, although none of these address the much more difficult task of segmenting hips suffering from FAIs. One such method required assigning a scan into one of four groups depending on the anticipated difficulty of segmentation, and in the worst case, separating the femur and acetabulum using a combination of the Hueckel operator and orthogonal line detection (Zoroofi, et al., 2003). Unfortunately, their techniques returned many moderate and poor results. Another method involved a significant amount of user-input, requiring the user to manually surround the femur head with contour points for a snake method and making manual correction whenever the snake failed due to soft edges (Magnenat-Thalmann, Yahia-Cherif, Gilles, & Molet, 2003).
In regards to model-based segmentation methods for femur bones, coarse-to-fine methods have been used with 3D meshes (Gilles, Moccozet, & Magnenat-Thalmann, 2006) for anatomical modeling, MRI scans with low resolutions or fields of view (Schmid, Kim, & Magnenat-Thalman, 2011), and statistical shape models (Yokota, Okada, Takao, Sugano, Tada, & Sato, 2009) have been used to segment diseased hips. In addition, 2D point-distribution models for ASMs (Song, Li, Ou, Han, Zhao, & Wang, 2007) have been tested against healthy hips. Generalized models of hip-bones can lead to complications when the object of segmentation has a FAI. This is due to the bony bump being outside the model’s expected distribution. Conversely, models specifically tailored for bones with impingements require a very large set of prior shapes as the location of the bony bumps can be highly irregular. To return the best segmentation results, a method which is elastic to the pronounced differences between bones is required.
2.4 Morphological Snakes
Our segmentation solution selected a 2D implementation of Morphological Snakes (Álvarez, Baumela, Henríquez, & Márquez-Neila, 2010) to extract our desired contours. This method is a recent modification of the well-known Geodesic Active Contours. The major difference between the two models is how each method solves the partial differential equations (PDEs) responsible for curve evolution. While Geodesic Active Contours expresses these PDEs with a set of differential operators, Morphological Snakes instead takes the approach of approximating these terms as the composition of morphological operators. Specifically, the inf (infimum) and sup (supremum) operators. This substitution claims three advantages: 1. Simplicity of Implementation – The level-set is
expressed as a binary piecewise constant function
2.
3.
3
3.1
Ouinsteuser-of thallow
ThregioWe whicspecearne
Fig
Ththe usectiuppefemutraceIn adthe c
Thfemuin Fiindexappefemu
3.2
Thstratecontainitiathen accuHowwithits edof thhead
To“acemade
Speed – Exeby full order oStability – Nis required
Segment
User Initi
ur segmentatiead of fully -interaction in
he segmentatiowing the followhe user’s inpons-of-interestsegment the
ch requires ified before est.
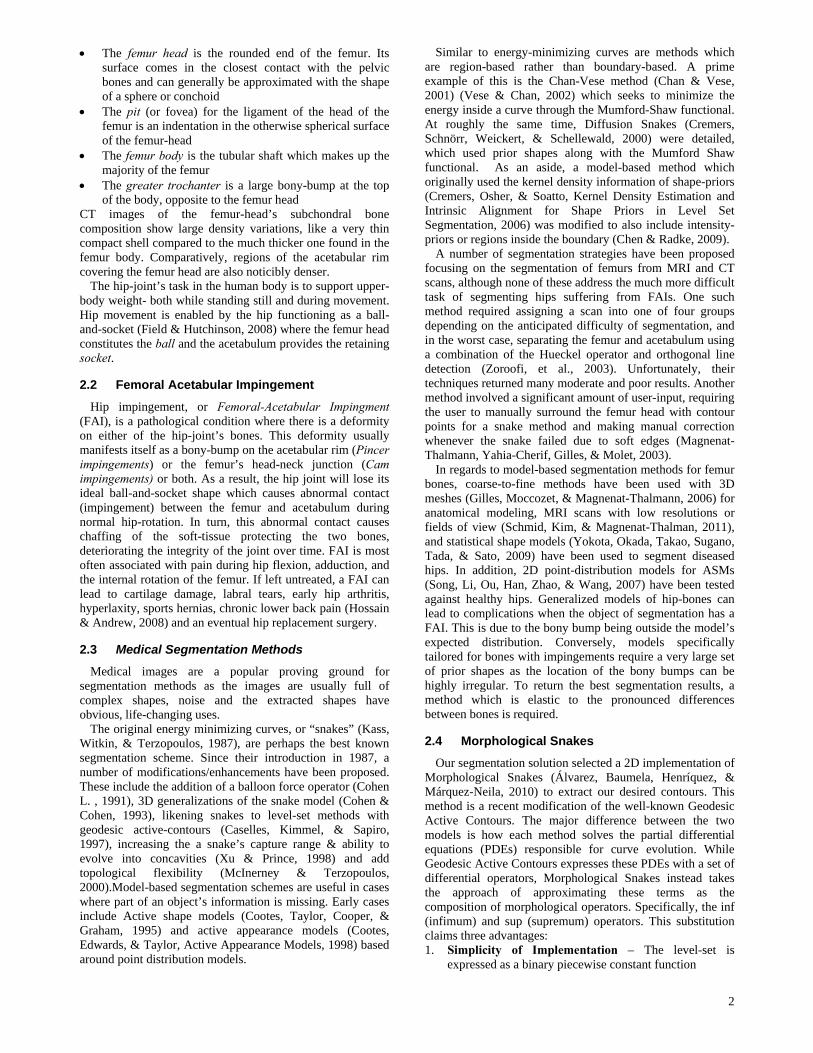
gure 3.1 Frontal v
he first of thesupper portionions of the aceer-bound is thur head whilees of the femuddition to thiscenter of the fehe second ROur body up toigure 3.1. We x of the slice
ear as two disur head), whic
Acetabula
he primary egy is the mains a sectional contour forbe attracted t
urate outline owever, in cases
strong edgesdges instead,
he femur headd being cuppedo neutralize thtabular-remove easier by t
cution time inof magnitude
No re-initializa
tation of th
alization
ion strategy automatic be
n order to achion process conwing stages tout is requirets (ROIs) withfemur head atwo partiallthe segmenta
view of the ROI fowith split slic
se ROIs encomn of the greateetabulum. Wehe topmost s
e its lower-bouur head’s sphe, a voxel who
femur head is aOI encloses tho the top of th
refer to it as where the cr
sjoined objecch we call Zs.
ar Rim Rem
driving forcmorphologicaln of the femur the snake mto the femur’sof the femur ws where the fes, the snake mwhich leads t
d. This is the d by the acetabhis unwanted sval” step is adthe fact that
n test was sh
ation of the lev
he Femur
is consideredcause it requieve its goal. Tntains all of tho perform autod in order tohin the volumand body semly-overlappingation procedu
or the femur (leftce in yellow
mpasses the wer trochanter refer to it as R
slice containinund contains ericity as showse location roalso attached the more tubuhe greater trocROIB. Attache
ross-sections ots (the greate
moval
e behind oul snake algorur, we can enethod. The sn
s edges and prwhose volumefemur is near tmay mistakenlto much less case for regiobulum. source of comdded to our sothe acetabula
horter, sometim
vel set or cont
d semi-automuires preliminThe current sthese interactioomatically. o demarcate
me of the CT scmi-independeng ROIs to ure can begin
t) head (right) bod
whole femur heand neighborROIH. Its vertng traces of the bottom-m
wn in Figure oughly constituto this ROI.
ular shape of chanter as shoed to ROIB is of the femur fer trochanter
ur segmentatrithm. If a snvelop it withnake method wrovide us withe we can extrto another objly be attractedaccurate outlions of the fem
mpeting edgesolution, which
ar rim has m
mes
tour
matic nary tage ons,
3D can. ntly,
be n in
dy
ead, ring tical
the most 3.1. utes
the own the
first and
tion lice
h an will h an ract. ject d to ines mur
, an h is
much
denbetporthepoi
TO
percomfemweappin o
CA
of thethrfilta)
b)
c)
AontopeThfraaceste
Tthebetbon
FT
reptheremcaures
(a)
(d)
Fiaf
aft
Twitlowappas the
nser bone thantter defined edrtions of the ae resulting holint for this pro
ThresholdingOur first steprform a threshmpact-bone. mur have a sheak edges. Apropriate valuone or two co
Creating the After having rcompact bone
e acetabulumresholded imater-out fragme
A fragment white voxelA fragment(right or leftA fragmentdistance aw
Any fragmentto a mask foeration is app
his has the agments and etabulum whiep. The final touce corners of tween the emne regions ins
Filling the MThe final step placing voxelse acetabulum.moval was to use the snakesults.
)
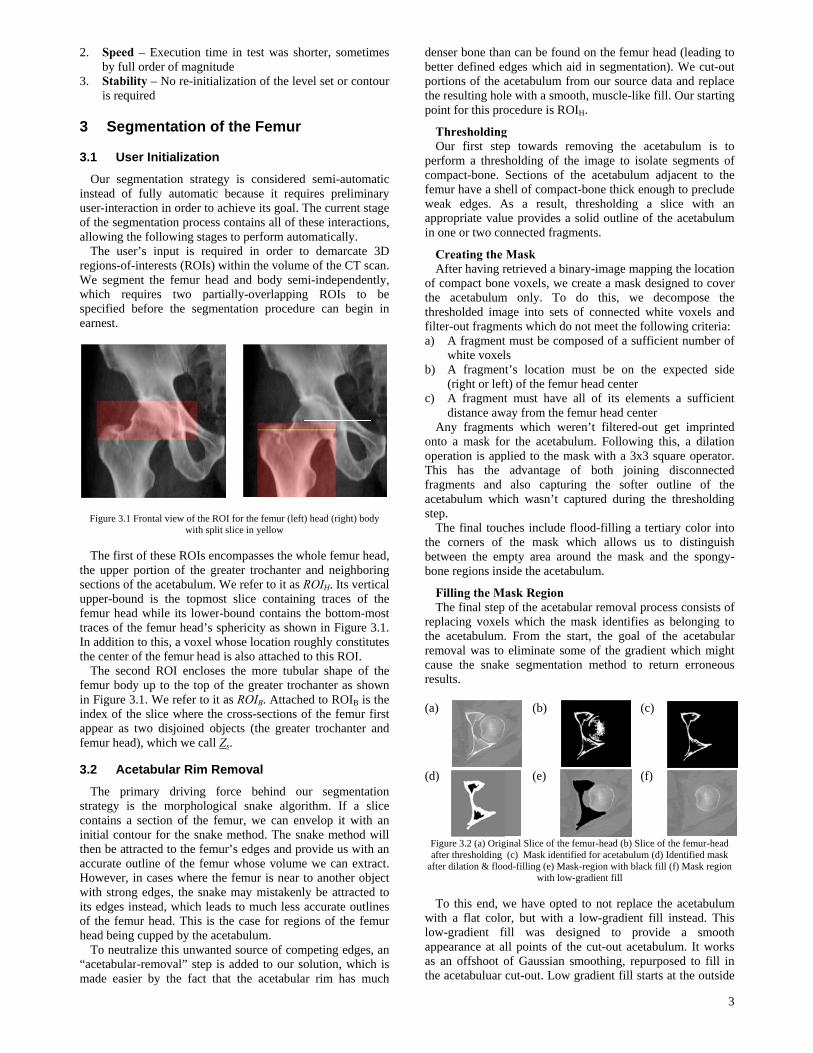
igure 3.2 (a) Origfter thresholding er dilation & floo
To this end, wth a flat colow-gradient fipearance at alan offshoot o
e acetabuluar
n can be foundges which aiacetabulum frle with a smooocedure is RO
g p towards reholding of thSections of tell of compac
As a result, ue provides a onnected fragm
Mask retrieved a bine voxels, we c
m only. To age into sets ents which do
must be comls t’s location m
ft) of the femut must have
way from the fets which werr the acetabu
plied to the madvantage oalso capturi
ich wasn’t ca
ches include fthe mask w
mpty area arouside the acetab
ask Region of the acetab
s which the m. From the steliminate som
e segmentatio
(b)
(e)
ginal Slice of the f(c) Mask identif
od-filling (e) Maswith low-
we have optedor, but with aill was desll points of thof Gaussian scut-out. Low
nd on the femuid in segmentrom our sourcoth, muscle-lik
OIH.
emoving the he image to isthe acetabulumct-bone thick e
thresholding solid outline
ments.
nary-image macreate a maskdo this, weof connected not meet the
mposed of a su
must be on ur head center all of its eleemur head cenren’t filtered-
ulum. Followimask with a 3x
of both joining the softeaptured during
flood-filling awhich allows
und the maskbulum.
ular removal mask identifietart, the goal me of the graon method to
femur-head (b) Sfied for acetabulusk-region with bla-gradient fill
d to not replaa low-gradientigned to prhe cut-out acesmoothing, repgradient fill s
ur head (leaditation). We cuce data and reke fill. Our sta
acetabulum solate segmenm adjacent tenough to pre
a slice witof the acetab
apping the lock designed to e decompose
white voxelsfollowing crit
ufficient numb
the expected
ments a suffinter -out get impring this, a dilx3 square opening disconner outline ofg the thresho
a tertiary colorus to distin
k and the spo
process consies as belongin
of the acetaadient which mo return erron
(c)
(f)
lice of the femur-um (d) Identified mack fill (f) Mask r
ace the acetabt fill instead. rovide a smetabulum. It wpurposed to fstarts at the ou
3
ing to ut-out eplace arting
is to nts of o the clude th an bulum
cation cover e the s and teria: ber of
d side
ficient
rinted lation
erator. nected f the
olding
r into nguish ongy-
sts of ng to
abular might neous
-head mask region
bulum This
mooth works fill in utside
of ththe aintenspinebe se
It concconcnear the s
3.3
In procour thresto eafuncindivreaso
3.3.
Thexistrouncurvnarrothis iof cuattem
Dusmalheadan ev
A contea sliwithartifisurfaOnceROIto be
Thamoube aincrebeingthis the g
3.3.2
Wvoxeas shto beguarvoxeconto
he cut-out andalgorithm is nsity in order es along the ceen in Figure 3is important
cerned with secentrates on i
to the femursnake-based se
Pre-proce
addition to aessing methoresults: upsc
sholding. By dach one of thtions can alvidual steps oon to believe t
1 Upscalin
he internal fot to ensure t
nded. This is ature arc slowow sections ointernal force urve evolutionmpting to segmue to the comll concavities d and neck whvolving snakesolution whi
ents of the ROce’s contents out using anicially widenace and dilutine a final con, the contour iecoming our fhe downside unt of time reattributed to eased, resulting exerted on ttrade-off acce
great improvem
2 Ceiling T
We apply a ceels while still hown in Figure sufficiently ranteed to correls are nearlyour.
d works its wathat it conve
r to prevent thcenter of the c3.2. t to note thaegmenting theidentifying par head and megmentation m
essing
acetabular rimds which gencaling, ceilindefault, all th
he contour-extlso be togglof the segmenthat it will imp
ng
rces acting othat the curv
desirable fowly. Howeveror sharp chan
can be the son or cause thement (He, et a
mparatively lowexist in the i
hich may inve’s internal forich has improOI. In this casinside the R
ny interpolatining narrow ng sharp angl
ntour has beenis downscaledfinal segmenta
to this soluequired to extr
the size of ng in needing tthe curve by meptable for smment in result
Threshold
eiling threshokeeping low
re 3.3. The ceihigh as to onrespond to co
y guaranteed
ay in. An adderge the fill the formation cut-out. The e
at acetabular e whole acetabarts of acetabarginalizing t
methods.
m removal, wnerally improvng thresholdinhree methods traction steps.led-off indiv
ntation procedprove results.
n a snake’s ee remains sm
or segmenting, when applieges in the dir
ource of premae curve to enteal., 2008). w resolution in cross-sectio
voke the detrimrces. oved results ise, upscaling OI by an inteion. This haconcavities
les in a cross-n extracted frd by the same ation result. ution is that ract a femur cthe evolving
to calculate thmore voxels. Hmall scale-factts.
old method toer-intensity viling thresholdnly highlight vompact bones.
to stop the s
ditional featureto a muscle-lof high-gradi
entire process
removal is bulum. It inst
bulum which their impact o
we use three pve the qualityng and floorare applied p. However, thidually and
dure if a user
evolving contmooth and wg objects whed to objects wrection of edgature terminater the object i
of the CT slicons of the femmental effects
is to upscalerefers to resizeger scale facas the effect on the femusections contorom an upscascale factor p
it increases contour. This g contour behe external forHowever, we ftor values due
o highlight bvoxel informatd value is chovoxels which . The highlighsnake’s evolv
e in like ient can
not tead are
over
pre-y of ring rior
hese for has
tour well-hose with ges, tion it is
ces, mur s of
the zing ctor,
of ur’s our. aled rior
the can
eing rces find e to
one tion
osen are
hted ving
3.3
Wintthiof thaappomwh
F
3.4
TCoappevocurtheconThposcan
Otwowh(b)staout
3.4
Wfemdifothproconconconto
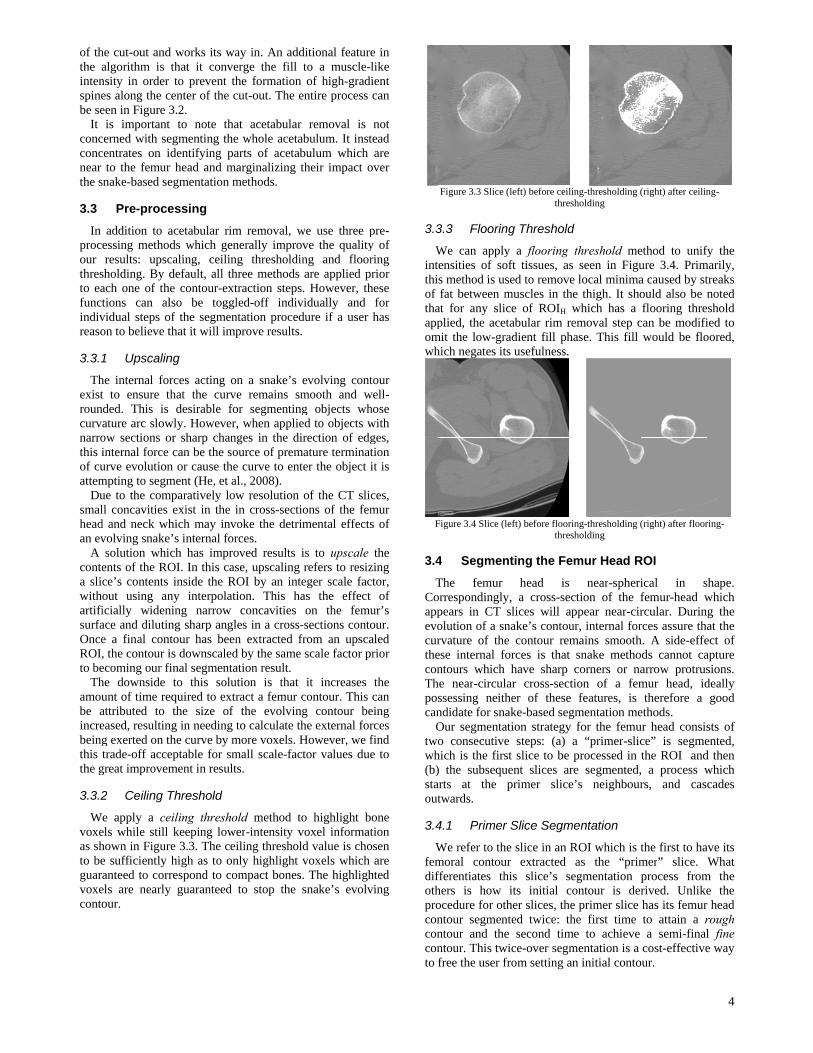
Figure 3.3 Slice
3.3 Floorin
We can applyensities of sos method is usfat between m
at for any sliplied, the ace
mit the low-grhich negates it
Figure 3.4 Slice (l
4 Segmen
The femur orrespondinglypears in CT olution of a snrvature of theese internal fontours which
he near-circulssessing neithndidate for snaOur segmentao consecutive
hich is the firs) the subsequarts at the twards.
4.1 Primer
We refer to thmoral contoufferentiates thhers is how ocedure for otntour segmenntour and thentour. This twfree the user f
(left) before ceilithres
ng Threshold
y a flooring oft tissues, assed to removemuscles in thce of ROIH wtabular rim re
radient fill phts usefulness.
left) before floorithres
nting the Fe
head is y, a cross-secslices will apnake’s contoue contour rem
forces is that have sharp
lar cross-secther of these ake-based segation strategy e steps: (a) ast slice to be uent slices arprimer slice
r Slice Segm
he slice in an Rur extracted his slice’s se
its initial cother slices, thented twice: the second tim
wice-over segmfrom setting an
ing-thresholding sholding
d
threshold mes seen in Figue local minimae thigh. It showhich has a emoval step c
hase. This fill
ing-thresholding sholding
mur Head R
near-spherction of the ppear near-cirur, internal formains smooth
snake methocorners or n
tion of a femfeatures, is
gmentation mefor the femu
a “primer-slicprocessed in
re segmented,e’s neighbour
mentation
ROI which is as the “prim
egmentation ontour is dee primer slice he first time
me to achievementation is a n initial conto
(right) after ceilin
ethod to unifyure 3.4. Prima caused by stould also be nflooring thre
can be modifiwould be flo
(right) after floor
ROI
rical in sfemur-head wrcular. Durinrces assure thah. A side-effeods cannot caarrow protrusmur head, idtherefore a
ethods. ur head consisce” is segmethe ROI and, a process wrs, and cas
the first to hamer” slice. process from
erived. Unlikehas its femurto attain a r a semi-finalcost-effective
our.
4
ng-
fy the marily, treaks noted shold ied to oored,
ring-
shape. which g the at the ect of apture sions. deally good
sts of ented, d then which cades
ave its What
m the e the r head rough l fine e way
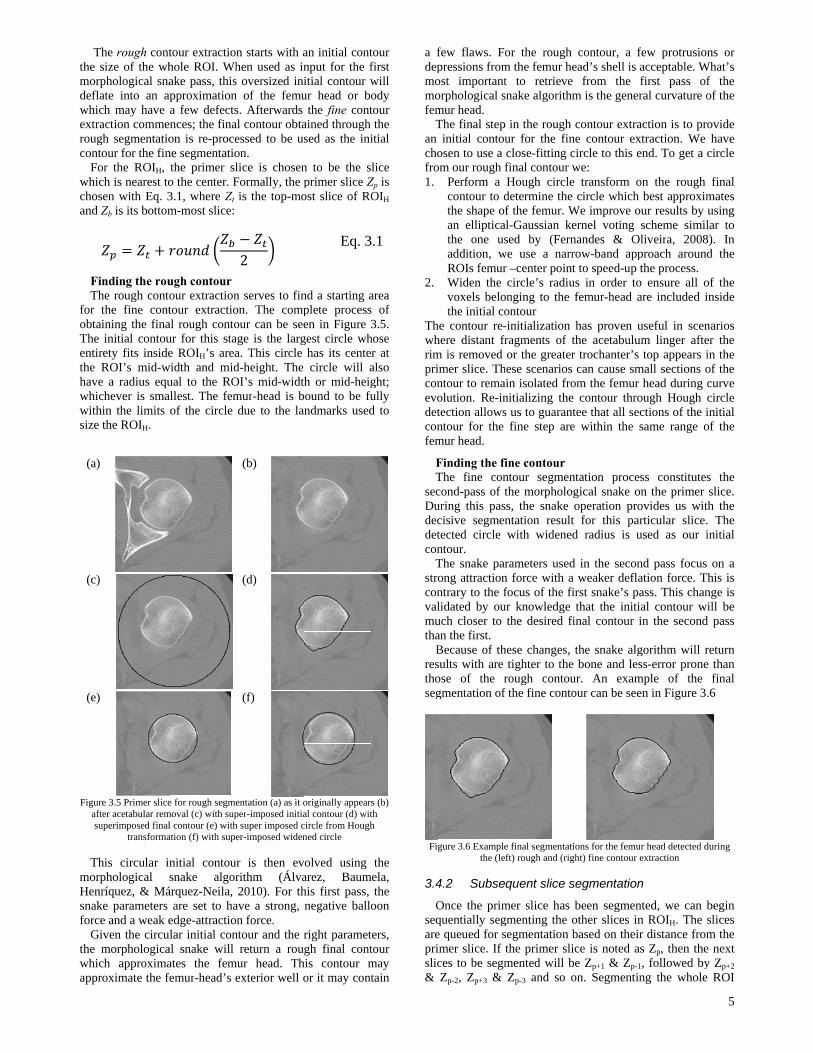
Ththe smorpdeflawhicextrarougconto
Fowhicchosand Z
FiTh
for tobtaiThe entirthe Rhavewhicwithsize
(a)
(c)
(e)
Figuraftsu
ThmorpHenrsnakforce
Githe mwhicappr
he rough contsize of the whphological snaate into an ach may have action commegh segmentatioour for the fin
or the ROIH, ch is nearest tosen with Eq. 3Zb is its bottom
nding the rouhe rough contthe fine contining the finainitial contou
rety fits insideROI’s mid-w
e a radius equchever is smain the limits the ROIH.
e 3.5 Primer sliceter acetabular remuperimposed final
transforma
his circular iphological ríquez, & Má
ke parameters e and a weak eiven the circumorphologicach approximaroximate the f
tour extractionhole ROI. Whake pass, this
approximationa few defects
ences; the finaon is re-procene segmentatiothe primer slo the center. F3.1, where Zt m-most slice:
ugh contour our extractiontour extractioal rough contour for this stae ROIH’s area
width and midual to the ROallest. The femof the circle
e for rough segmemoval (c) with supl contour (e) withation (f) with supe
nitial contoursnake algor
árquez-Neila, are set to ha
edge-attractioular initial conal snake will ates the femfemur-head’s e
n starts with ahen used as ins oversized inn of the femus. Afterwards al contour obtaessed to be uon. lice is chosenFormally, the pis the top-mo
2
n serves to finon. The compour can be seeage is the larga. This circle d-height. The OI’s mid-widtmur-head is bdue to the la
(b)
(d)
(f)
entation (a) as it oper-imposed initiah super imposed cer-imposed widen
r is then evrithm (Álva2010). For th
ave a strong, n force.
ntour and the return a rou
mur head. Thexterior well o
an initial contnput for the fitial contour wur head or b
the fine contained through sed as the ini
n to be the sprimer slice Zost slice of RO
Eq. 3
nd a starting aplete processen in Figure
gest circle whhas its cente
circle will ath or mid-heigbound to be fuandmarks used
originally appearal contour (d) witcircle from Houghned circle
volved using arez, Baumhis first pass, negative ballo
right parametugh final conthis contour mor it may cont
tour first will ody tour the
itial
lice Zp is OIH
.1
area s of 3.5.
hose er at also ght;
fully d to
s (b) th h
the mela,
the oon
ters, tour may tain
a fdepmomofem
Tan chofro1.
2.
Thwhrimpriconevodetconfem
FT
secDudecdetcon
Tstroconvalmutha
Bresthoseg
Fig
3.4
Oseqareprislic&
few flaws. Fopressions fromost importantorphological smur head. The final step
initial contouosen to use a
om our rough fPerform a contour to dthe shape ofan ellipticathe one usaddition, wROIs femurWiden thevoxels belothe initial co
he contour re-here distant frm is removed imer slice. Thntour to remaolution. Re-intection allowsntour for the mur head.
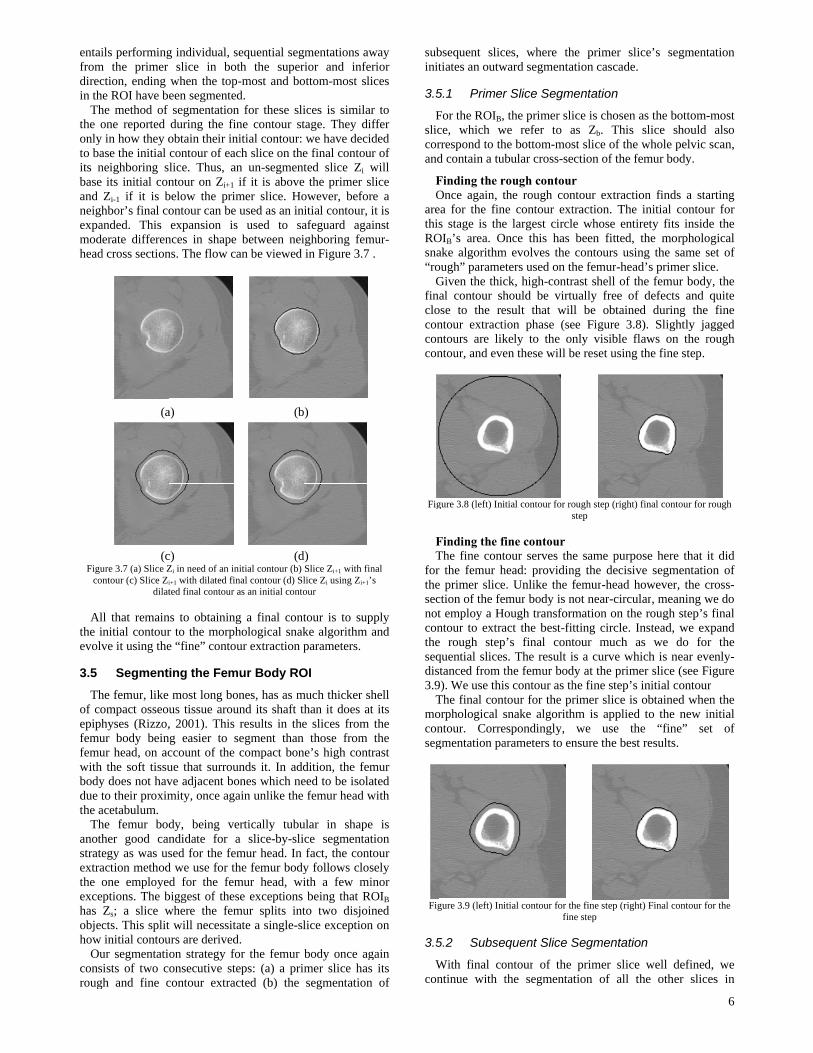
Finding the fiThe fine concond-pass of turing this pascisive segmentected circle ntour. The snake parong attractionntrary to the flidated by ouuch closer to an the first. Because of thsults with are ose of the rgmentation of
gure 3.6 Examplethe (le
4.2 Subse
Once the primquentially sege queued for simer slice. If tces to be segmZp-2, Zp+3 &
or the rough m the femur het to retrievesnake algorithm
in the rough ur for the finclose-fitting cfinal contour wHough circledetermine the f the femur. W
al-Gaussian kesed by (Fern
we use a narrr –center pointcircle’s radiu
onging to the ontour -initialization ragments of tor the greater
hese scenarios in isolated fro
nitializing thes us to guarant
fine step are
ine contour ntour segmenthe morpholos, the snake ntation resultwith widened
rameters usedn force with afocus of the fiur knowledge
the desired fi
hese changes, tighter to the
rough contouf the fine conto
e final segmentatift) rough and (rig
quent slice s
mer slice has gmenting the osegmentation bthe primer slimented will bZp-3 and so o
contour, a fead’s shell is a from the m is the gener
contour extrane contour excircle to this ewe: e transform o circle which
We improve oernel voting nandes & Orow-band appt to speed-up t
us in order tofemur-head a
has proven uthe acetabulur trochanter’s can cause sm
om the femur e contour throtee that all sece within the s
ntation procegical snake ooperation pro
t for this pard radius is u
d in the secona weaker deflairst snake’s pathat the initi
final contour i
the snake alge bone and lesur. An examour can be see
ions for the femught) fine contour e
segmentation
been segmenother slices inbased on theirice is noted abe Zp+1 & Zp-1
on. Segmentin
few protrusionacceptable. Wfirst pass ofral curvature o
action is to proxtraction. We end. To get a c
on the rough best approxim
our results by scheme similliveira, 2008proach aroundthe process.
o ensure all oare included i
useful in scenum linger afte
top appears imall sections o
head during cough Hough ctions of the isame range o
ss constituteson the primer ovides us witrticular slice.used as our i
nd pass focus ation force. Tass. This chanial contour win the second
gorithm will rss-error prone
mple of the en in Figure 3.
ur head detected dextraction
n
nted, we can bn ROIH. The r distance froms Zp, then the
1, followed byng the whole
5
ns or What’s
f the of the
ovide have
circle
final mates using lar to
8). In d the
of the inside
narios er the in the of the curve circle initial of the
s the slice.
th the . The initial
on a his is nge is ill be
d pass
return e than
final .6
during
begin slices m the e next y Zp+2 e ROI
entaifromdirecin th
Ththe oonlyto baits nbaseand neighexpamodhead
Figuco
Althe ievolv
3.5
Thof coepiphfemufemuwithbodydue tthe a
Thanothstrateextrathe oexcehas objechow
Ouconsroug
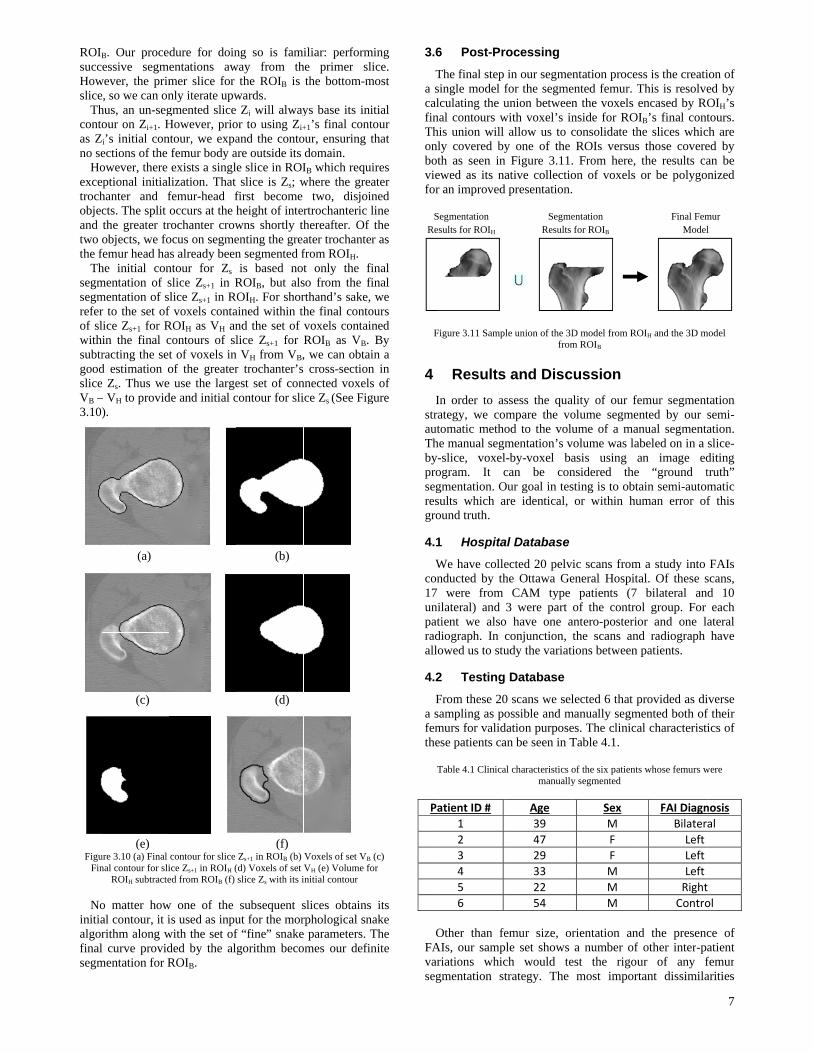
ils performingm the primer ction, ending he ROI have behe method of one reported in how they oase the initial neighboring s its initial conZi-1 if it is bhbor’s final co
anded. This derate differend cross section
(a
(cure 3.7 (a) Slice Z
ontour (c) Slice Zi
dilat
ll that remaininitial contourve it using the
Segment
he femur, like ompact osseouhyses (Rizzo,ur body beinur head, on ac the soft tissu
y does not havto their proximacetabulum. he femur bodher good canegy as was usaction methodone employe
eptions. The bZs; a slice wcts. This splitinitial contou
ur segmentatisists of two cgh and fine c
g individual, sslice in bo
when the topeen segmentesegmentationduring the finobtain their incontour of eaclice. Thus, anntour on Zi+1
below the primontour can be expansion is
nces in shapens. The flow c
a)
c) Zi in need of an ini+1 with dilated finted final contour
ns to obtainingr to the morphe “fine” conto
ing the Fem
most long bous tissue arou, 2001). This
ng easier to sccount of the ue that surrouve adjacent bomity, once aga
dy, being vendidate for ased for the femd we use for thd for the fem
biggest of theswhere the femt will necessiturs are derivedon strategy foonsecutive stecontour extrac
sequential segth the super
p-most and bod.
n for these sline contour st
nitial contour: ch slice on then un-segmentif it is abovemer slice. Housed as an in
s used to sa between neian be viewed
(b
(dnitial contour (b) nal contour (d) Slas an initial conto
g a final conthological snakur extraction p
mur Body RO
ones, has as mund its shaft t
results in thesegment thancompact bon
unds it. In addones which neain unlike the
ertically tubua slice-by-slimur head. In he femur bodymur head, wise exceptions mur splits intate a single-sl
d. or the femur eps: (a) a pricted (b) the
gmentations awrior and infeottom-most sli
ices is similartage. They diwe have deci
e final contouted slice Zi w
e the primer sowever, befor
nitial contour, afeguard agaighboring femin Figure 3.7
b)
d) Slice Zi+1 with finlice Zi using Zi+1’our
tour is to supke algorithm parameters.
OI
much thicker shthan it does ate slices from those from
ne’s high contdition, the femeed to be isola
femur head w
ular in shapece segmentatfact, the conty follows closith a few mibeing that R
to two disjoilice exception
body once agmer slice hassegmentation
way erior ices
r to ffer ded
ur of will lice re a it is
ainst mur-
.
nal ’s
pply and
hell t its the the
trast mur ated with
e is tion tour sely inor
ROIB ned
n on
gain s its n of
subinit
3.5
Fsliccorand
FO
arethiROsna“ro
Gfincloconconcon
Fig
FT
forthesecnotcontheseqdis3.9
Tmoconseg
Fig
3.5
Wcon
bsequent slictiates an outw
5.1 Primer
For the ROIB, ce, which wrrespond to thd contain a tub
Finding the rOnce again, tea for the fines stage is the
OIB’s area. Oake algorithmough” parametGiven the thicnal contour shose to the rentour extractintours are likntour, and eve
gure 3.8 (left) Init
Finding the fiThe fine contr the femur he primer slicection of the femt employ a Hontour to extrae rough stepquential slicesstanced from t9). We use thisThe final contorphological sntour. Corregmentation pa
gure 3.9 (left) Ini
5.2 Subse
With final continue with t
es, where thward segmenta
r Slice Segm
the primer sliwe refer to ahe bottom-mosbular cross-se
ough contourthe rough cone contour ext
e largest circlnce this has
m evolves the ters used on thck, high-contrhould be virtuesult that wilion phase (sekely to the onen these will b
tial contour for ros
ine contour our serves th
head: providin. Unlike the fmur body is nough transformact the best-fit’s final conts. The result ithe femur bods contour as thtour for the prsnake algorithespondingly, arameters to en
itial contour for thfin
quent Slice S
ontour of the the segmenta
he primer sliation cascade.
mentation
ice is chosen aas Zb. This st slice of the ection of the fe
r ntour extractiotraction. The e whose entirbeen fitted, contours usin
he femur-headrast shell of thually free of ll be obtaineee Figure 3.8nly visible fl
be reset using
ough step (right) step
e same purpong the decisivfemur-head h
not near-circulmation on thetting circle. Intour much ais a curve whidy at the primehe fine step’s rimer slice is hm is applied
we use thnsure the best
he fine step (rightne step
Segmentatio
primer slice ation of all th
ce’s segment
as the bottom-slice should whole pelvic
emur body.
on finds a stainitial contourety fits insidthe morpholong the same sd’s primer sliche femur body
defects and d during the
8). Slightly jalaws on the rthe fine step.
final contour for
ose here that ive segmentatiohowever, the clar, meaning we rough step’snstead, we ex
as we do forich is near ever slice (see Finitial contourobtained wheto the new i
e “fine” se results.
t) Final contour f
on
well definedhe other slic
6
tation
-most also
scan,
arting ur for de the ogical set of ce. y, the quite
e fine agged rough
rough
it did on of cross-we do s final xpand r the
venly-Figure r
en the initial et of
for the
d, we es in
ROIB
succHowslice
Thcontoas Zno se
Hoexcetrochobjecand two the f
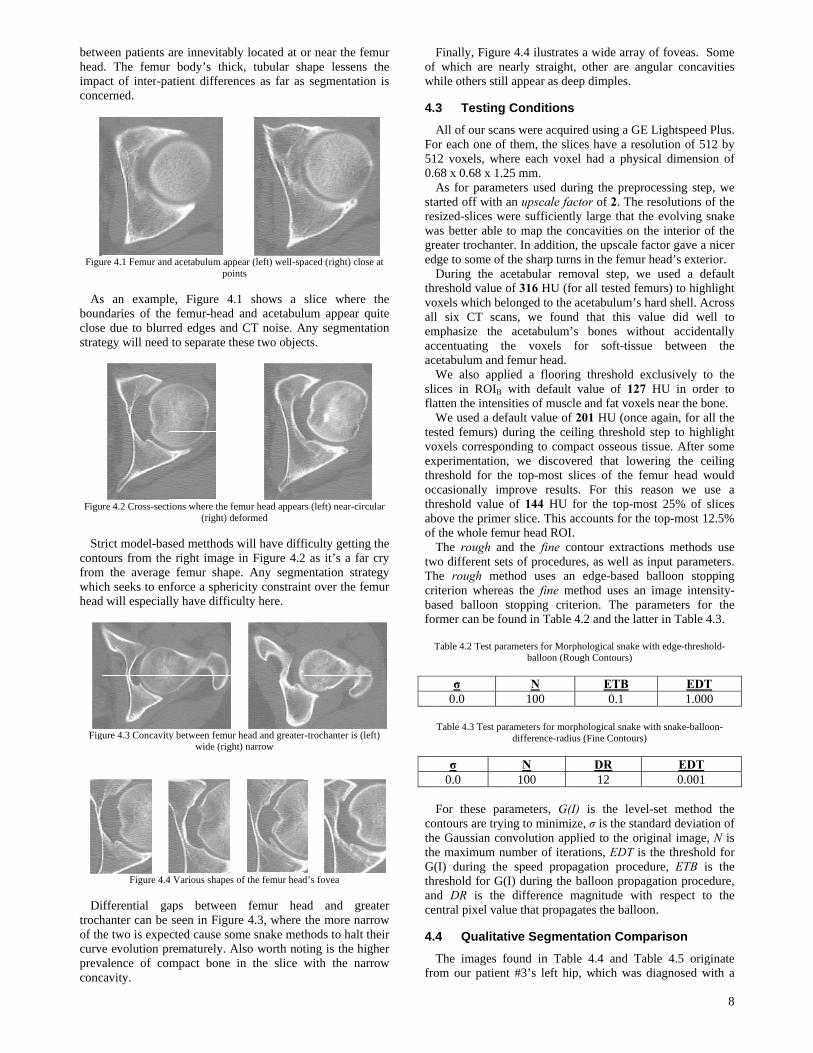
Thsegmsegmreferof slwithsubtrgoodsliceVB –3.10
FiguFin
Noinitiaalgorfinalsegm
B. Our proceessive segm
wever, the prime, so we can onhus, an un-segour on Zi+1. H
Zi’s initial conections of the owever, there eptional initialhanter and fcts. The split the greater trobjects, we fo
femur head hahe initial conmentation of smentation of sr to the set oflice Zs+1 for Rin the final cracting the setd estimation oe Zs. Thus we– VH to provid).
(a)
(c)
(e) ure 3.10 (a) Final nal contour for sli
ROIH subtracte
o matter howal contour, it irithm along wl curve providmentation for R
dure for doinentations awmer slice for nly iterate upwgmented slice However, priontour, we expa
femur body aexists a singl
lization. That femur-head foccurs at the hrochanter crowocus on segmeas already beenntour for Zs slice Zs+1 in Rlice Zs+1 in R
f voxels contaROIH as VH ancontours of slt of voxels inof the greater
e use the largede and initial c
contour for slice ice Zs+1 in ROIH (ed from ROIB (f)
w one of the is used as inpu
with the set ofded by the alROIB.
ng so is famiway from th
the ROIB is wards.
Zi will alwayor to using Zi+
and the contoare outside its e slice in ROIslice is Zs; w
first become height of interwns shortly thenting the grean segmented fis based not
ROIB, but alsROIH. For shorained within thnd the set of lice Zs+1 for
n VH from VB,r trochanter’s est set of concontour for sli
(b)
(d)
(f) Zs+1 in ROIB (b)
(d) Voxels of set slice Zs with its i
subsequent sut for the morf “fine” snakegorithm beco
iliar: performhe primer sl
the bottom-m
ys base its ini+1’s final cont
our, ensuring tdomain. IB which requwhere the gre
two, disjoirtrochanteric lhereafter. Of ater trochantefrom ROIH. t only the fiso from the firthand’s sake,he final contovoxels contaiROIB as VB. , we can obtai
cross-sectionnnected voxelsice Zs (See Fig
Voxels of set VB
VH (e) Volume foinitial contour
slices obtainsrphological sne parameters. Tomes our defin
ming lice.
most
itial tour that
uires ater ned line the
er as
final final we
ours ined
By in a n in s of gure
(c) or
s its nake The nite
3.6
Ta scalfinThonlbotviefor
SRe
F
4
IstraautThby-prosegresgro
4.1
Wcon17 unipatradallo
4.2
Fa sfemthe
T
Pa
O
FAvarseg
6 Post-Pr
The final step single model flculating the u
nal contours whis union will ly covered byth as seen in ewed as its nar an improved
Segmentation sults for ROIH
Figure 3.11 Sampl
Results
In order to asategy, we cotomatic metho
he manual segm-slice, voxelogram. It cgmentation. Osults which aound truth.
1 Hospita
We have collenducted by th
were fromilateral) and tient we alsodiograph. In cowed us to stu
2 Testing
From these 20sampling as pomurs for validese patients ca
Table 4.1 Clinica
atient ID #
1
2
3
4
5
6
Other than feAIs, our sampriations whicgmentation st
rocessing
in our segmenfor the segmeunion between
with voxel’s inallow us to c
y one of the Figure 3.11.
ative collectiopresentation.
SegmeResults
le union of the 3Dfrom
and Disc
ssess the quampare the vood to the volumentation’s v-by-voxel bacan be con
Our goal in tesare identical,
al Database
ected 20 pelvihe Ottawa Ge
CAM type 3 were part
o have one aconjunction, tudy the variati
Database
0 scans we selossible and m
dation purposean be seen in T
al characteristics omanually
Age
39
47
29
33
22
54
emur size, orle set shows ch would tetrategy. The
ntation procesented femur. Tn the voxels enside for ROIconsolidate thROIs versus
. From here, on of voxels
entation for ROIB
D model from ROm ROIB
ussion
ality of our feolume segmenume of a man
volume was labasis using ansidered the sting is to obtaor within hu
ic scans fromeneral Hospita
patients (7 of the contro
antero-posteriothe scans andions between
lected 6 that pmanually segmes. The clinicaTable 4.1.
of the six patientsy segmented
Sex
M
F
F
M
M
M
rientation anda number of
est the rigoumost import
ss is the creatiThis is resolveencased by ROIB’s final conthe slices whic
those coverethe results caor be polygo
Final FemModel
OIH and the 3D m
emur segmentnted by our nual segmentabeled on in aan image ed
“ground tain semi-automuman error of
m a study into al. Of these s
bilateral anol group. For or and one ld radiograph patients.
provided as dimented both ofal characteristi
s whose femurs w
FAI Diagn
Bilater
Left
Left
Left
Right
Contro
d the presencother inter-pa
ur of any ftant dissimila
7
ion of ed by OIH’s tours.
ch are ed by an be nized
mur l
model
tation semi-ation. slice-diting truth” matic f this
FAIs scans, d 10 each
ateral have
iverse f their ics of
were
nosis
al
t
ol
ce of atient femur arities
betwheadimpaconc
Figu
Asbounclosestrate
Figu
Strcontofromwhichead
Fig
Ditrochof thcurvprevconc
ween patients ad. The femuract of inter-pacerned.
ure 4.1 Femur and
s an examplndaries of thee due to blurregy will need
ure 4.2 Cross-sect
rict model-basours from the
m the averagech seeks to end will especial
gure 4.3 Concavity
Figure 4.4
ifferential gahanter can be he two is expee evolution pralence of com
cavity.
are innevitablr body’s thicatient differen
d acetabulum app
poin
e, Figure 4.e femur-head red edges andto separate th
tions where the fe
(right) de
sed metthods e right image e femur shapenforce a spherily have difficu
y between femur
wide (righ
4 Various shapes
aps betweenseen in Figurcted cause somrematurely. Ampact bone
ly located at ock, tubular shnces as far as
pear (left) well-spnts
1 shows a and acetabul
d CT noise. Ahese two objec
emur head appeareformed
will have diffin Figure 4.2
e. Any segmicity constrainulty here.
head and greaterht) narrow
of the femur head
n femur heare 4.3, where me snake met
Also worth notin the slice
or near the femhape lessens s segmentation
paced (right) close
slice where lum appear qu
Any segmentatcts.
rs (left) near-circu
ficulty getting2 as it’s a far entation stratnt over the fem
r-trochanter is (lef
d’s fovea
ad and grethe more narr
thods to halt thting is the higwith the narr
mur the
n is
e at
the uite tion
ular
the cry
tegy mur
ft)
ater row heir gher row
Fof wh
4.3
AFor5120.6
Astareswagreedg
Dthrvoxall emaccace
Wslicflat
Wtesvoxexpthroccthraboof
TtwoThcritbasfor
T
T
F
conthetheG(thrandcen
4.4
Tfro
Finally, Figurewhich are ne
hile others still
3 Testing
All of our scanr each one of2 voxels, whe
68 x 0.68 x 1.2As for paramearted off with sized-slices was better able eater trochantege to some of During the areshold value xels which be
six CT scamphasize the centuating thetabulum and We also applces in ROIB
tten the intensWe used a defsted femurs) dxels corresponperimentationreshold for thcasionally imreshold value ove the primethe whole femThe rough ano different set
he rough metterion whereased balloon rmer can be fo
Table 4.2 Test par
σ 0.0
Table 4.3 Test pa
σ 0.0
For these parntours are tryie Gaussian coe maximum nuI) during the
reshold for G(d DR is the ntral pixel val
4 Qualitat
The images fom our patien
e 4.4 ilustrateearly straightl appear as de
Conditions
ns were acquif them, the sliere each voxe25 mm. eters used duan upscale faere sufficientlto map the coer. In addition
f the sharp turnacetabular remof 316 HU (fo
elonged to the ans, we foun
acetabulum’he voxels femur head.
lied a floorinwith default
sities of musclfault value of during the ceinding to com
n, we discovehe top-most smprove result
of 144 HU er slice. This amur head ROI.nd the fine cots of procedurthod uses anas the fine mstopping crit
ound in Table
rameters for Morpballoon (Ro
N 100
arameters for mordifference-radiu
N 100
rameters, G(Iing to minimiz
onvolution appumber of iter
e speed propa(I) during the
difference mue that propag
tive Segmen
found in Tabnt #3’s left hip
es a wide arrayt, other are aeep dimples.
s
red using a Gices have a reel had a phys
uring the prepctor of 2. Thely large that toncavities on n, the upscale ns in the femumoval step, wor all tested feacetabulum’sd that this vs bones witfor soft-tiss
ng threshold value of 12
le and fat voxf 201 HU (onciling threshold
mpact osseous ered that lowlices of the f
ts. For this for the top-maccounts for th. ontour extractres, as well asn edge-based
method uses anerion. The p4.2 and the la
phological snake ough Contours)
ETB 0.1
rphological snakeus (Fine Contour
DR 12
I) is the levze, σ is the staplied to the orrations, EDT iagation proceballoon prop
magnitude wigates the ballo
ntation Com
le 4.4 and Tp, which was
y of foveas. Sangular conca
GE Lightspeed esolution of 51sical dimensio
rocessing stepe resolutions othe evolving sthe interior ofactor gave a
ur head’s exterwe used a deemurs) to highs hard shell. Avalue did wethout acciden
sue between
exclusively to7 HU in ord
xels near the bce again, for ad step to hightissue. After
wering the cefemur head wreason we u
most 25% of he top-most 1
tions methods input param
balloon stopn image inten
parameters foatter in Table 4
with edge-thresh
EDT1.00
e with snake-ballos)
EDT0.001
vel-set methodandard deviatiriginal image,is the thresholedure, ETB i
pagation proceith respect tooon.
mparison
Table 4.5 origs diagnosed w
8
Some avities
Plus. 12 by on of
p, we of the snake of the nicer
rior. efault hlight
Across ell to ntally
the
o the der to one.
all the hlight some eiling would use a slices 2.5%
ds use meters.
pping nsity-
or the 4.3.
hold-
T 0
oon-
d the ion of , N is ld for is the edure, o the
ginate with a
cam baseof thtroch Table
Head Top
Head Mid
Head Botto
A obtaimanuhead
Tab
GreatTroch
MinorTroch
FemuBody
Th
for avoxemorp
Thconshighslice
Thoverbothwereour s
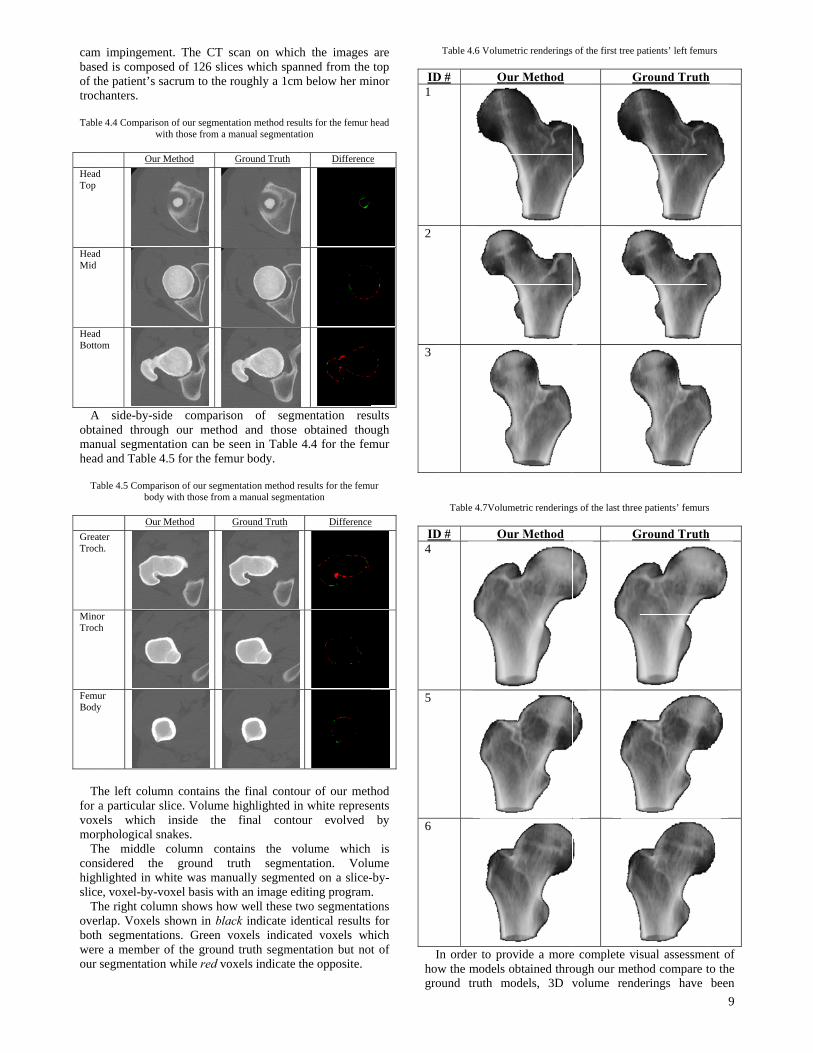
impingementd is composed
he patient’s sahanters.
e 4.4 Comparison with
Our M
m
side-by-sideined through ual segmentat
d and Table 4.
ble 4.5 Comparisbody w
Our M
er h.
r h
ur
he left columna particular sliels which iphological snahe middle csidered the lighted in wh
e, voxel-by-vohe right columrlap. Voxels s segmentation
e a member osegmentation
t. The CT scd of 126 slicecrum to the ro
of our segmentath those from a ma
Method G
e compariso our methodtion can be se5 for the femu
son of our segmenwith those from a
Method G
n contains theice. Volume hinside the akes. column conta
ground truhite was manuoxel basis withmn shows how
hown in blacns. Green vo
of the ground while red vox
can on whiches which spanoughly a 1cm
tion method resulanual segmentati
Ground Truth
on of segmd and those een in Table 4ur body.
ntation method rea manual segment
Ground Truth
e final contouhighlighted in final contou
ains the vouth segmentually segmenteh an image edi
w well these twck indicate ideoxels indicatetruth segmen
xels indicate th
h the images nned from the
below her mi
lts for the femur hon
Difference
mentation resobtained thou4.4 for the fem
esults for the femutation
Difference
ur of our methwhite represe
ur evolved
olume which tation. Volued on a slice-iting program
wo segmentatientical results ed voxels whntation but nohe opposite.
are top
inor
head
e
ults ugh mur
ur
e
hod ents
by
is ume -by-. ions
for hich t of
ID1
2
3
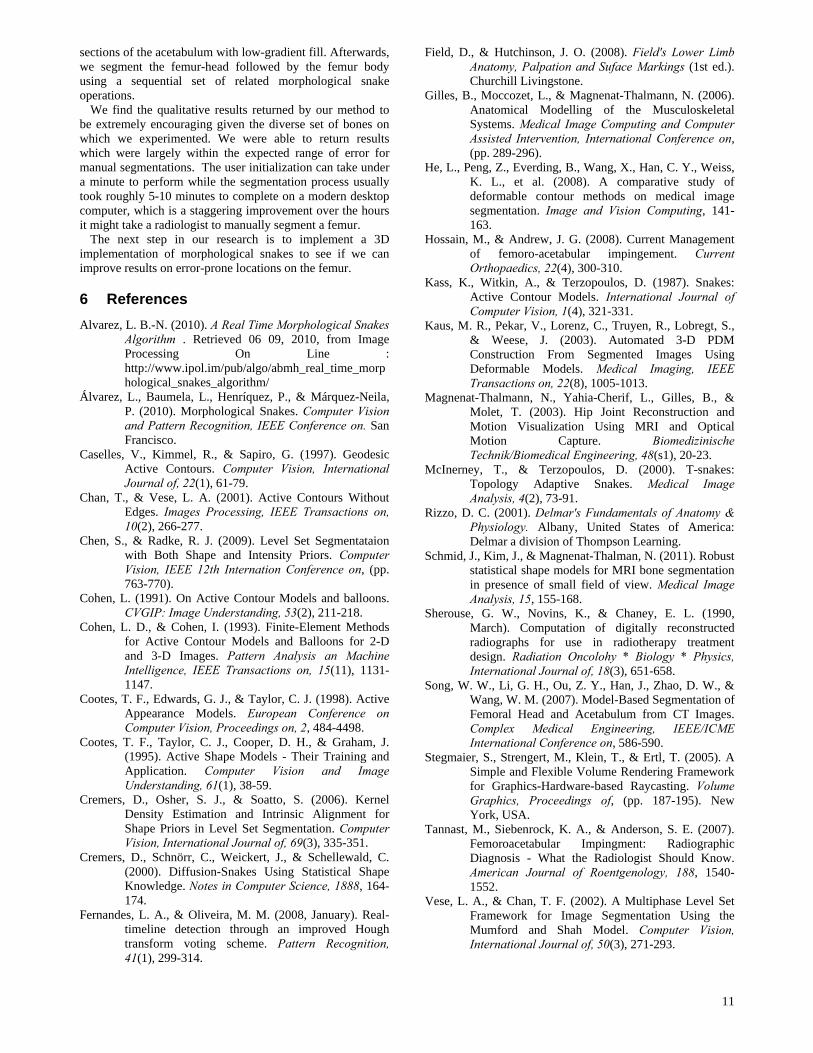
ID4
5
6
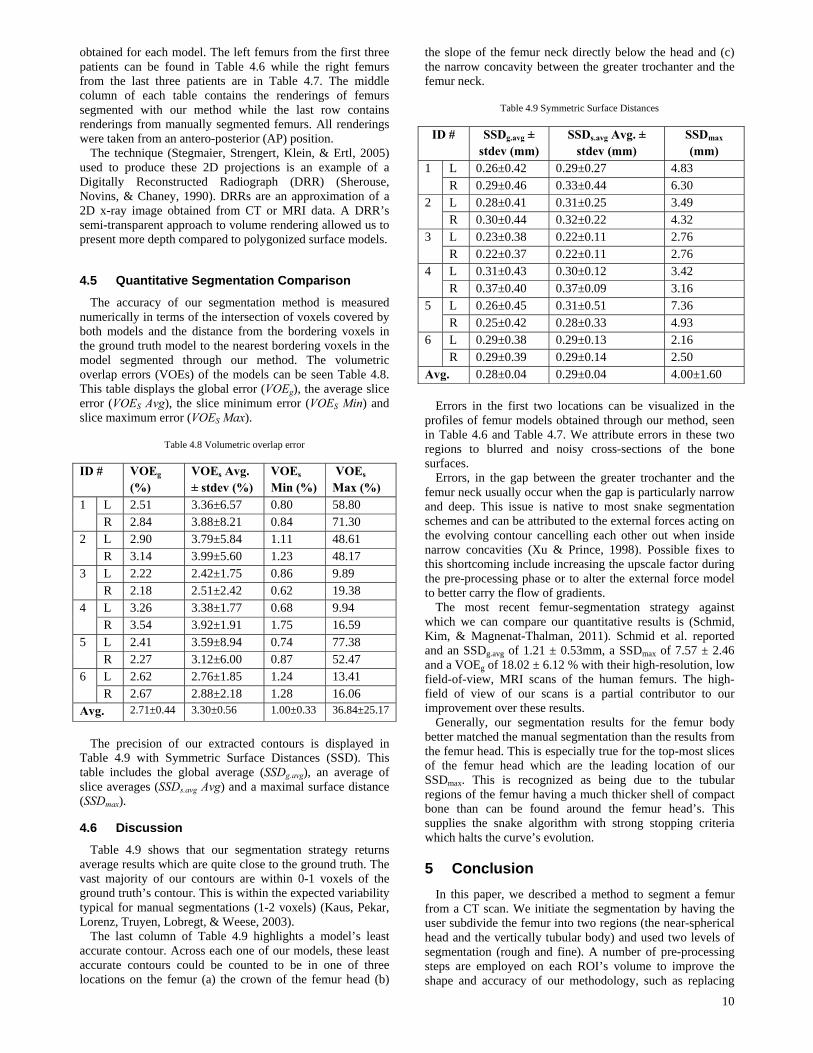
Ihowgro
Table 4.6 Volum
D # O
Table 4.7Volu
D # O
In order to prw the models ound truth m
metric renderings
Our Method
umetric rendering
Our Method
rovide a moreobtained thro
models, 3D v
of the first tree p
G
gs of the last three
G
e complete visough our methvolume rend
patients’ left femu
Ground Truth
e patients’ femurs
Ground Truth
sual assessmehod compare terings have
9
urs
h
s
h
ent of to the been
10
obtained for each model. The left femurs from the first three patients can be found in Table 4.6 while the right femurs from the last three patients are in Table 4.7. The middle column of each table contains the renderings of femurs segmented with our method while the last row contains renderings from manually segmented femurs. All renderings were taken from an antero-posterior (AP) position.
The technique (Stegmaier, Strengert, Klein, & Ertl, 2005) used to produce these 2D projections is an example of a Digitally Reconstructed Radiograph (DRR) (Sherouse, Novins, & Chaney, 1990). DRRs are an approximation of a 2D x-ray image obtained from CT or MRI data. A DRR’s semi-transparent approach to volume rendering allowed us to present more depth compared to polygonized surface models.
4.5 Quantitative Segmentation Comparison
The accuracy of our segmentation method is measured numerically in terms of the intersection of voxels covered by both models and the distance from the bordering voxels in the ground truth model to the nearest bordering voxels in the model segmented through our method. The volumetric overlap errors (VOEs) of the models can be seen Table 4.8. This table displays the global error (VOEg), the average slice error (VOES Avg), the slice minimum error (VOES Min) and slice maximum error (VOES Max).
Table 4.8 Volumetric overlap error
ID # VOEg (%)
VOEs Avg. ± stdev (%)
VOEs Min (%)
VOEs Max (%)
1 L 2.51 3.36±6.57 0.80 58.80 R 2.84 3.88±8.21 0.84 71.30
2 L 2.90 3.79±5.84 1.11 48.61 R 3.14 3.99±5.60 1.23 48.17
3 L 2.22 2.42±1.75 0.86 9.89 R 2.18 2.51±2.42 0.62 19.38
4 L 3.26 3.38±1.77 0.68 9.94 R 3.54 3.92±1.91 1.75 16.59
5 L 2.41 3.59±8.94 0.74 77.38 R 2.27 3.12±6.00 0.87 52.47
6 L 2.62 2.76±1.85 1.24 13.41 R 2.67 2.88±2.18 1.28 16.06
Avg. 2.71±0.44 3.30±0.56 1.00±0.33 36.84±25.17
The precision of our extracted contours is displayed in
Table 4.9 with Symmetric Surface Distances (SSD). This table includes the global average (SSDg.avg), an average of slice averages (SSDs.avg Avg) and a maximal surface distance (SSDmax).
4.6 Discussion
Table 4.9 shows that our segmentation strategy returns average results which are quite close to the ground truth. The vast majority of our contours are within 0-1 voxels of the ground truth’s contour. This is within the expected variability typical for manual segmentations (1-2 voxels) (Kaus, Pekar, Lorenz, Truyen, Lobregt, & Weese, 2003).
The last column of Table 4.9 highlights a model’s least accurate contour. Across each one of our models, these least accurate contours could be counted to be in one of three locations on the femur (a) the crown of the femur head (b)
the slope of the femur neck directly below the head and (c) the narrow concavity between the greater trochanter and the femur neck.
Table 4.9 Symmetric Surface Distances
ID # SSDg.avg ± stdev (mm)
SSDs.avg Avg. ± stdev (mm)
SSDmax (mm)
1 L 0.26±0.42 0.29±0.27 4.83 R 0.29±0.46 0.33±0.44 6.30
2 L 0.28±0.41 0.31±0.25 3.49 R 0.30±0.44 0.32±0.22 4.32
3 L 0.23±0.38 0.22±0.11 2.76 R 0.22±0.37 0.22±0.11 2.76
4 L 0.31±0.43 0.30±0.12 3.42 R 0.37±0.40 0.37±0.09 3.16
5 L 0.26±0.45 0.31±0.51 7.36 R 0.25±0.42 0.28±0.33 4.93
6 L 0.29±0.38 0.29±0.13 2.16 R 0.29±0.39 0.29±0.14 2.50
Avg. 0.28±0.04 0.29±0.04 4.00±1.60 Errors in the first two locations can be visualized in the
profiles of femur models obtained through our method, seen in Table 4.6 and Table 4.7. We attribute errors in these two regions to blurred and noisy cross-sections of the bone surfaces.
Errors, in the gap between the greater trochanter and the femur neck usually occur when the gap is particularly narrow and deep. This issue is native to most snake segmentation schemes and can be attributed to the external forces acting on the evolving contour cancelling each other out when inside narrow concavities (Xu & Prince, 1998). Possible fixes to this shortcoming include increasing the upscale factor during the pre-processing phase or to alter the external force model to better carry the flow of gradients.
The most recent femur-segmentation strategy against which we can compare our quantitative results is (Schmid, Kim, & Magnenat-Thalman, 2011). Schmid et al. reported and an SSDg.avg of 1.21 ± 0.53mm, a SSDmax of 7.57 ± 2.46 and a VOEg of 18.02 ± 6.12 % with their high-resolution, low field-of-view, MRI scans of the human femurs. The high-field of view of our scans is a partial contributor to our improvement over these results.
Generally, our segmentation results for the femur body better matched the manual segmentation than the results from the femur head. This is especially true for the top-most slices of the femur head which are the leading location of our SSDmax. This is recognized as being due to the tubular regions of the femur having a much thicker shell of compact bone than can be found around the femur head’s. This supplies the snake algorithm with strong stopping criteria which halts the curve’s evolution.
5 Conclusion
In this paper, we described a method to segment a femur from a CT scan. We initiate the segmentation by having the user subdivide the femur into two regions (the near-spherical head and the vertically tubular body) and used two levels of segmentation (rough and fine). A number of pre-processing steps are employed on each ROI’s volume to improve the shape and accuracy of our methodology, such as replacing
11
sections of the acetabulum with low-gradient fill. Afterwards, we segment the femur-head followed by the femur body using a sequential set of related morphological snake operations.
We find the qualitative results returned by our method to be extremely encouraging given the diverse set of bones on which we experimented. We were able to return results which were largely within the expected range of error for manual segmentations. The user initialization can take under a minute to perform while the segmentation process usually took roughly 5-10 minutes to complete on a modern desktop computer, which is a staggering improvement over the hours it might take a radiologist to manually segment a femur.
The next step in our research is to implement a 3D implementation of morphological snakes to see if we can improve results on error-prone locations on the femur.
6 References
Alvarez, L. B.-N. (2010). A Real Time Morphological Snakes Algorithm . Retrieved 06 09, 2010, from Image Processing On Line : http://www.ipol.im/pub/algo/abmh_real_time_morphological_snakes_algorithm/
Álvarez, L., Baumela, L., Henríquez, P., & Márquez-Neila, P. (2010). Morphological Snakes. Computer Vision and Pattern Recognition, IEEE Conference on. San Francisco.
Caselles, V., Kimmel, R., & Sapiro, G. (1997). Geodesic Active Contours. Computer Vision, International Journal of, 22(1), 61-79.
Chan, T., & Vese, L. A. (2001). Active Contours Without Edges. Images Processing, IEEE Transactions on, 10(2), 266-277.
Chen, S., & Radke, R. J. (2009). Level Set Segmentataion with Both Shape and Intensity Priors. Computer Vision, IEEE 12th Internation Conference on, (pp. 763-770).
Cohen, L. (1991). On Active Contour Models and balloons. CVGIP: Image Understanding, 53(2), 211-218.
Cohen, L. D., & Cohen, I. (1993). Finite-Element Methods for Active Contour Models and Balloons for 2-D and 3-D Images. Pattern Analysis an Machine Intelligence, IEEE Transactions on, 15(11), 1131-1147.
Cootes, T. F., Edwards, G. J., & Taylor, C. J. (1998). Active Appearance Models. European Conference on Computer Vision, Proceedings on, 2, 484-4498.
Cootes, T. F., Taylor, C. J., Cooper, D. H., & Graham, J. (1995). Active Shape Models - Their Training and Application. Computer Vision and Image Understanding, 61(1), 38-59.
Cremers, D., Osher, S. J., & Soatto, S. (2006). Kernel Density Estimation and Intrinsic Alignment for Shape Priors in Level Set Segmentation. Computer Vision, International Journal of, 69(3), 335-351.
Cremers, D., Schnörr, C., Weickert, J., & Schellewald, C. (2000). Diffusion-Snakes Using Statistical Shape Knowledge. Notes in Computer Science, 1888, 164-174.
Fernandes, L. A., & Oliveira, M. M. (2008, January). Real-timeline detection through an improved Hough transform voting scheme. Pattern Recognition, 41(1), 299-314.
Field, D., & Hutchinson, J. O. (2008). Field's Lower Limb Anatomy, Palpation and Suface Markings (1st ed.). Churchill Livingstone.
Gilles, B., Moccozet, L., & Magnenat-Thalmann, N. (2006). Anatomical Modelling of the Musculoskeletal Systems. Medical Image Computing and Computer Assisted Intervention, International Conference on, (pp. 289-296).
He, L., Peng, Z., Everding, B., Wang, X., Han, C. Y., Weiss, K. L., et al. (2008). A comparative study of deformable contour methods on medical image segmentation. Image and Vision Computing, 141-163.
Hossain, M., & Andrew, J. G. (2008). Current Management of femoro-acetabular impingement. Current Orthopaedics, 22(4), 300-310.
Kass, K., Witkin, A., & Terzopoulos, D. (1987). Snakes: Active Contour Models. International Journal of Computer Vision, 1(4), 321-331.
Kaus, M. R., Pekar, V., Lorenz, C., Truyen, R., Lobregt, S., & Weese, J. (2003). Automated 3-D PDM Construction From Segmented Images Using Deformable Models. Medical Imaging, IEEE Transactions on, 22(8), 1005-1013.
Magnenat-Thalmann, N., Yahia-Cherif, L., Gilles, B., & Molet, T. (2003). Hip Joint Reconstruction and Motion Visualization Using MRI and Optical Motion Capture. Biomedizinische Technik/Biomedical Engineering, 48(s1), 20-23.
McInerney, T., & Terzopoulos, D. (2000). T-snakes: Topology Adaptive Snakes. Medical Image Analysis, 4(2), 73-91.
Rizzo, D. C. (2001). Delmar's Fundamentals of Anatomy & Physiology. Albany, United States of America: Delmar a division of Thompson Learning.
Schmid, J., Kim, J., & Magnenat-Thalman, N. (2011). Robust statistical shape models for MRI bone segmentation in presence of small field of view. Medical Image Analysis, 15, 155-168.
Sherouse, G. W., Novins, K., & Chaney, E. L. (1990, March). Computation of digitally reconstructed radiographs for use in radiotherapy treatment design. Radiation Oncolohy * Biology * Physics, International Journal of, 18(3), 651-658.
Song, W. W., Li, G. H., Ou, Z. Y., Han, J., Zhao, D. W., & Wang, W. M. (2007). Model-Based Segmentation of Femoral Head and Acetabulum from CT Images. Complex Medical Engineering, IEEE/ICME International Conference on, 586-590.
Stegmaier, S., Strengert, M., Klein, T., & Ertl, T. (2005). A Simple and Flexible Volume Rendering Framework for Graphics-Hardware-based Raycasting. Volume Graphics, Proceedings of, (pp. 187-195). New York, USA.
Tannast, M., Siebenrock, K. A., & Anderson, S. E. (2007). Femoroacetabular Impingment: Radiographic Diagnosis - What the Radiologist Should Know. American Journal of Roentgenology, 188, 1540-1552.
Vese, L. A., & Chan, T. F. (2002). A Multiphase Level Set Framework for Image Segmentation Using the Mumford and Shah Model. Computer Vision, International Journal of, 50(3), 271-293.

12
Xu, C., & Prince, J. L. (1998). Snakes, Shapes, and Gradient Vector Flow. Image Processing, IEEE Transactions on, 7(3), 359-369.
Yokota, F., Okada, T., Takao, M., Sugano, N., Tada, Y., & Sato, Y. (2009). Automated Segmentation of the Femur and Pelvis from 3D CT Data of Diseased Hip Uding Hierachical Statistical Shape Model of Joint Structure. Medical Image Computing and Computer-Assisted Intevention: Lecture Notes from Computer Science, 5762, 811-818.
Zoroofi, R. A., Sato, T., Sasama, T., Nishii, T., Nobuhiko, S., Yonenobu, K., et al. (2003). Automated Segmentaiton of Acetabulum and Femoral Head From 3-D CT Images. Information Technology in Biomedicine, IEEE Transactions on, 7(4), 329-343.





























