Embed Size (px)
Citation preview
+
Sensing and actuating for Human-in-the-Loop systems: the autonomous driving case
Alessandro Beghi, Mattia Bruschetta
+Outline
n Part I: Autonomous driving, the scenarion Autonomous vehicles: Hype or real business?
n Getting rid of the human: sensing and actuating
n Human in the loop
n Part II: Driving Simulatorsn Driver Centric Automotive Engineering
n Model Predictive Control
n Virtual Driver
n Motion Cueing Algorithms
HIL systems & autonomous driving A. Beghi, M. Bruschetta
2

+Part I: Autonomous driving, the scenario
A. Beghi, M. Bruschetta HIL systems & autonomous driving 3

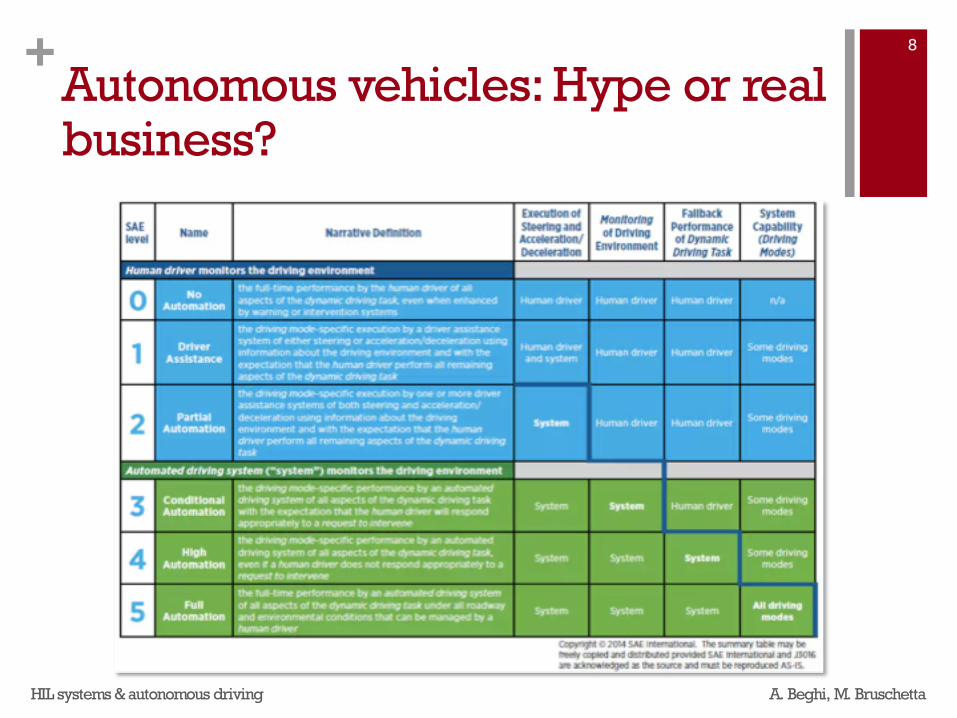
+Autonomous vehicles: Hype or realbusiness?n Among the trends that are going to shape the automotive
industry in the coming years, autonomous driving stands out as having the potential to completely change the automotiveindustry as we know it.
n Auto-makers around the world are unanimous in predictingthe emergence of autonomous driving sometime in the nexttwo decades
n The prevailing view is that the speed of these breakthroughsis limited by regulatory constraints and liability issuesmore than by the underlying technologies.
n On the technology side, making functions operate seamlesslyto ensure driver comfort and reducing the cost of advanced systems are key challenges.
HIL systems & autonomous driving A. Beghi, M. Bruschetta
4

+Autonomous vehicles: Hype or realbusiness?
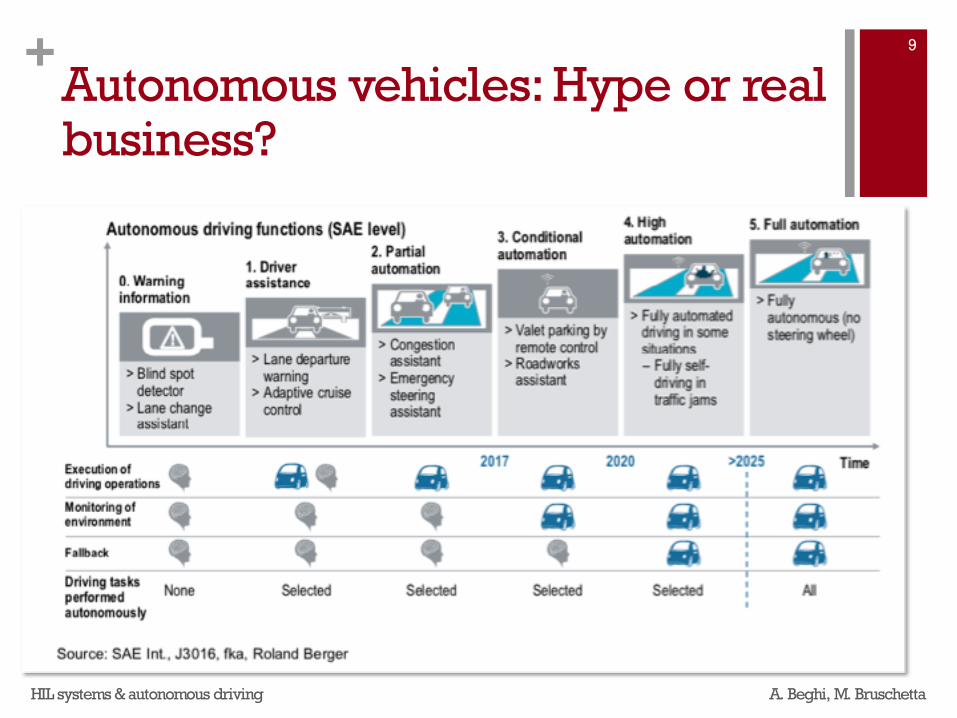
n Experts forecast that there will be a mixture of semi-autonomous and fully automated vehicles on the roads in the next decade, with steadily increasing penetration of both.
n With a minimum starting cost of approximately US$10,000 to equip a midsize vehicle with fully autonomous drivingcapability, the technology is expected to be found mostly in the premium segment and on commercial vehicles atfirst.
n On the other hand, the evolution is driving a strong market penetration of Advanced Driver Assistant Systems (ADAS) on «standard» vehicles.
n Market value hard to estimate: from hundreds of billions to trillions USD.
HIL systems & autonomous driving A. Beghi, M. Bruschetta
5

+Autonomous vehicles: Hype or realbusiness?
HIL systems & autonomous driving A. Beghi, M. Bruschetta
6

+Autonomous vehicles: Hype or realbusiness?
n 2017 claims:
n VAG – Fully Self-Driving Cars by 2020n GM – Rumors of Self-Driving by 2018n Ford – True Self-Driving by 2021n Honda – Self-Driving on the Highway by 2020n Toyota – Self-Driving on the Highway by 2020n Renault-Nissan – 2020 for Autonomous Cars in Urban Conditions,
2025 for Truly Driverless Carsn Volvo – Self-Driving on the Highway by 2021n Hyundai – Highway 2020, Urban Driving 2030n Daimler – Nearly Fully Autonomous by Early 2020’sn FCA – expects there to be some self driving on the road
by 2021n BMW – Fully self-driving possible by 2021n Tesla – End of 2017
HIL systems & autonomous driving A. Beghi, M. Bruschetta
7
+Autonomous vehicles: Hype or realbusiness?
HIL systems & autonomous driving A. Beghi, M. Bruschetta
8
+Autonomous vehicles: Hype or realbusiness?
HIL systems & autonomous driving A. Beghi, M. Bruschetta
9

+Autonomous vehicles: Hype or realbusiness?
HIL systems & autonomous driving A. Beghi, M. BruschettaSource: Roland Berger
10

+Autonomous vehicles as ArtificialIntelligence champions
n Intelligence: what features?n Memory
n Learning
n Generalization
n Abstraction
n Planning
n Problem solving
n Fully AUTONOMOUS!
n «Hard AI» approach
HIL systems & autonomous driving A. Beghi, M. Bruschetta
11

+Autonomous vehicles as Cyber-Physical Systems (CPS)
n ʺA cyber-physical system (CPS) integrates computing, communication and storage capabilities with monitoringand/or control of entities in the physical world, and must do so dependably, safely, securely, efficiently and in real-time.“ (S. Shankar Sastry, UC Berkeley)
HIL systems & autonomous driving A. Beghi, M. BruschettaSource: Vincenzo Liberatore, NetworkedCyber-Physical Systems: An Introduction, 2007
12
+Getting rid of the human: actuating and sensing
A. Beghi, M. Bruschetta HIL systems & autonomous driving 13
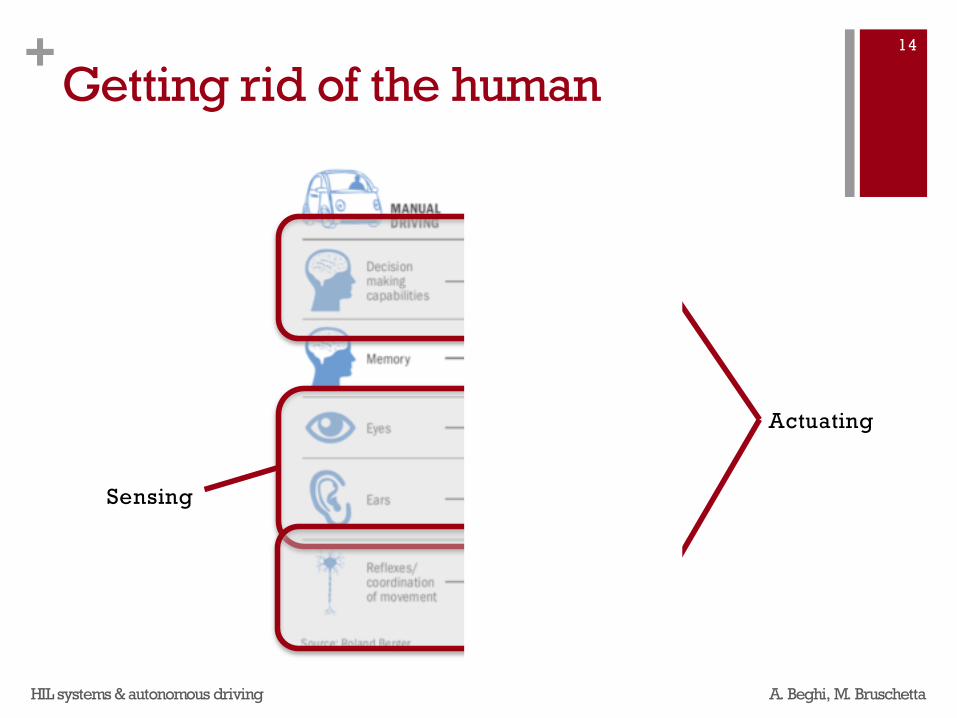
+Getting rid of the human
HIL systems & autonomous driving A. Beghi, M. Bruschetta
14
Sensing
Actuating
+Getting rid of the human
HIL systems & autonomous driving A. Beghi, M. Bruschetta
§ Vehicle's location and environment: highly precise and real-time information of a vehicle's location and its surrounding environment(e.g., road signs, pedestrian traffic, curbs, obstacles, traffic rules).
§ Prediction & decision algorithms: advanced concepts based on unsupervised/deep learning, machine learning will be needed to create systems to detect, predict and react to the behavior of otherroad users, including other vehicles, pedestrians, and animals.
§ High accuracy, real-time maps: detailed and complete mapsmust be available to provide additional and redundant information for the environmental models that vehicles will use for path and trajectory planning.
§ Vehicle driver interface: self-adapting interface with smoothtransition of control to/from the driver, mechanisms to keep the driver alert and a flawless ride experience for user acceptance
15

+Actuating = going «by-wire»
HIL systems & autonomous driving A. Beghi, M. Bruschetta
§ "by-wire": replacing a pure mechanical system of motion or control with a sensor, an actuator, and some computing power (CPS)
§ X-by-wire technology is referred to primarily three categories: Throttle-by-wire, Brake-by-wire, and Steer-by-wire (in order of their perceived complexity and risk, from lowest to highest)
§ «dry system»: the hydraulic fluids are no longer necessary. Thisleads to a simpler and more easily maintained system.
§ An x-by-wire system can also be easily upgraded or adjusted to different needs as it is software-defined (download the new software, no parts must be replaced).
§ Sensing the vehicle!
16
+Actuating = going «by-wire»
HIL systems & autonomous driving A. Beghi, M. Bruschetta
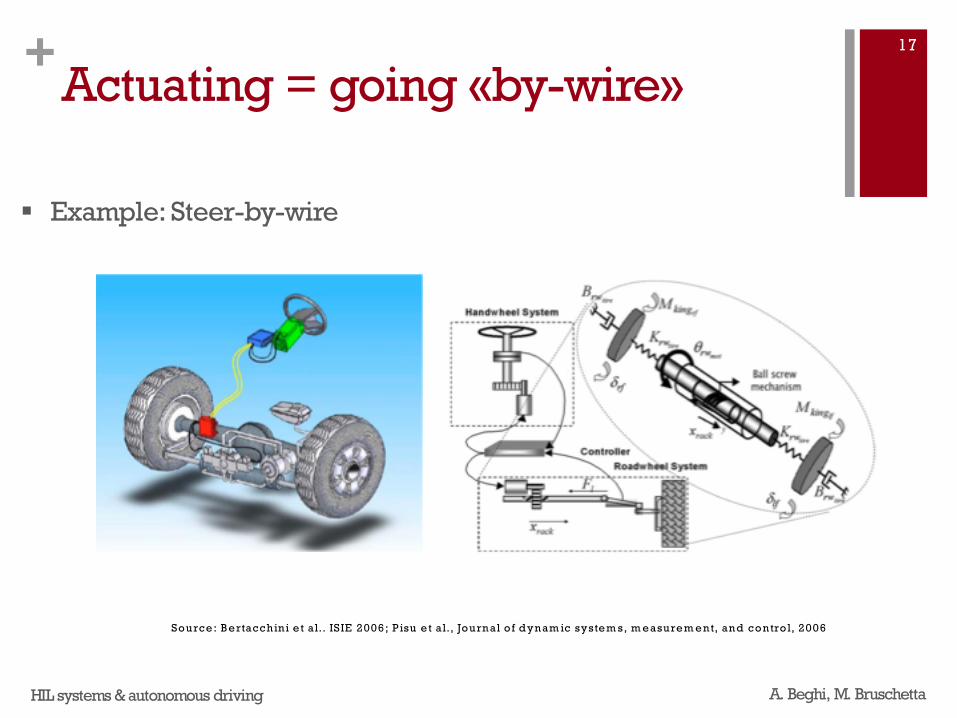
§ Example: Steer-by-wire
17
Source: Bertacchini et al.. ISIE 2006; P isu et al., Journal o f dynam ic system s, m easurem ent, and control, 2006

+Actuating = going «by-wire»
HIL systems & autonomous driving A. Beghi, M. Bruschetta
Source: Kissai et al, ECMR 2017
18
+Actuating = going «by-wire»
HIL systems & autonomous driving A. Beghi, M. Bruschetta
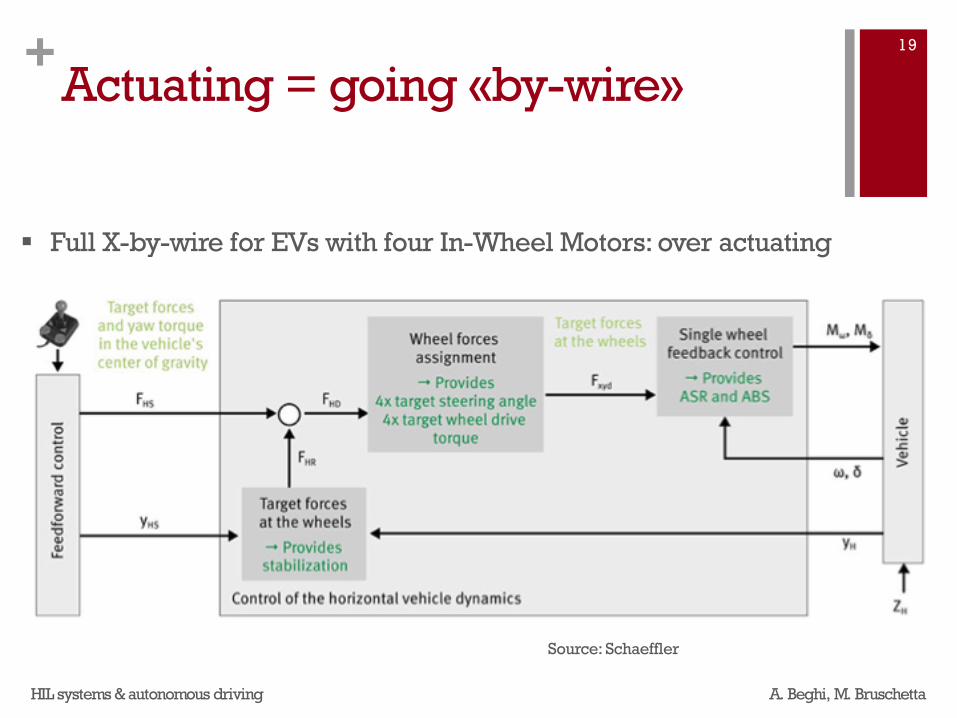
§ Full X-by-wire for EVs with four In-Wheel Motors: over actuating
19
Source: Schaeffler
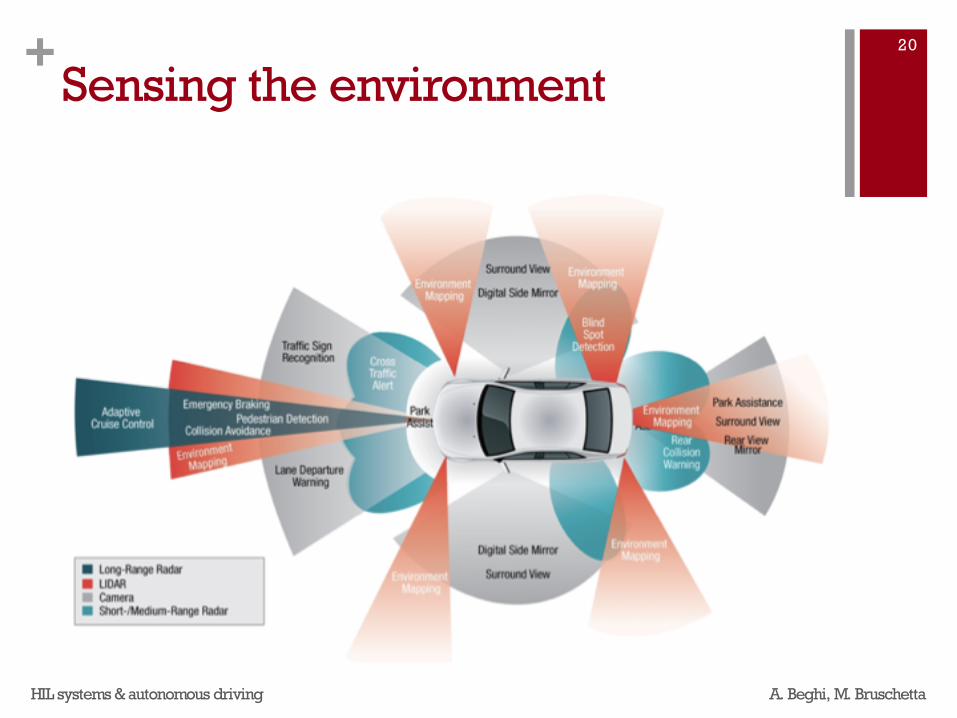
+Sensing the environment
HIL systems & autonomous driving A. Beghi, M. Bruschetta
20

+Sensing the environment
HIL systems & autonomous driving A. Beghi, M. Bruschetta
Source: 2025 AD
21
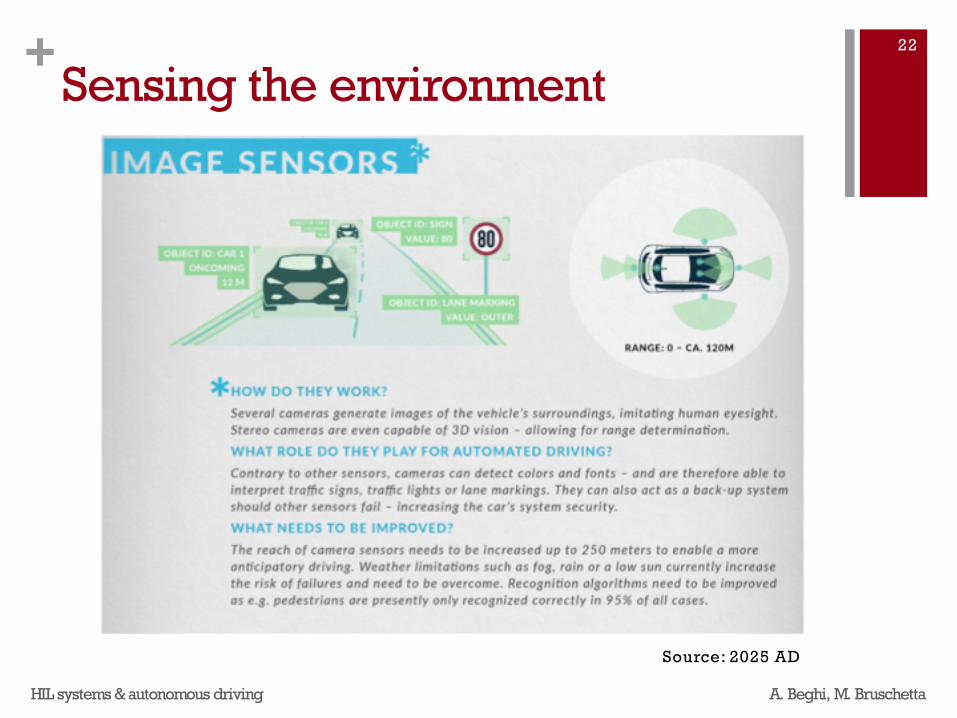
+Sensing the environment
HIL systems & autonomous driving A. Beghi, M. Bruschetta
Source: 2025 AD
22
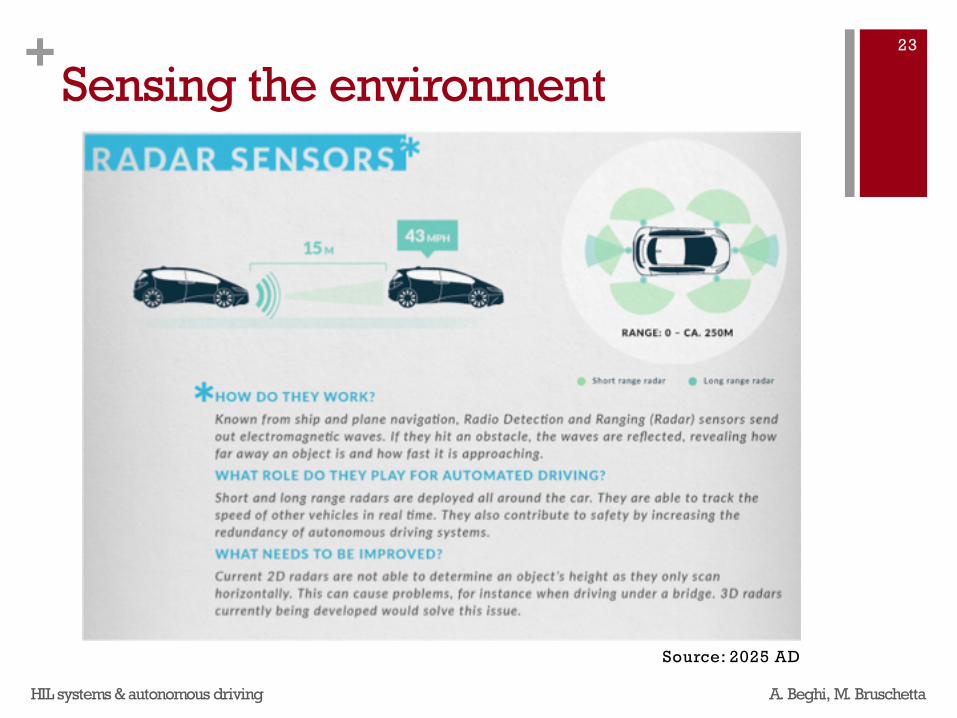
+Sensing the environment
HIL systems & autonomous driving A. Beghi, M. Bruschetta
Source: 2025 AD
23
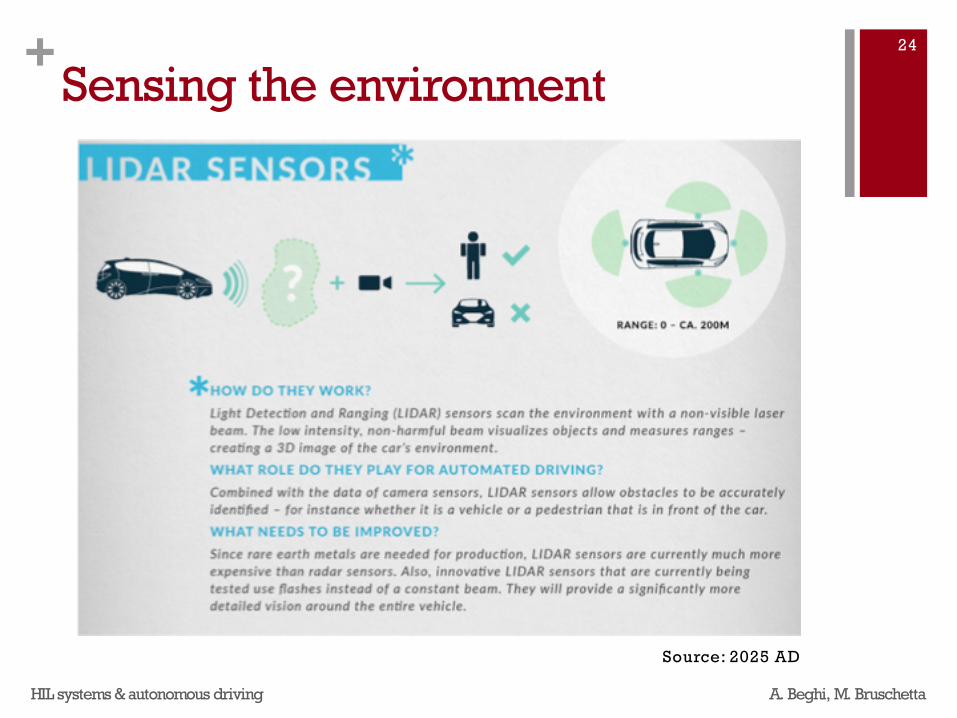
+Sensing the environment
HIL systems & autonomous driving A. Beghi, M. Bruschetta
Source: 2025 AD
24
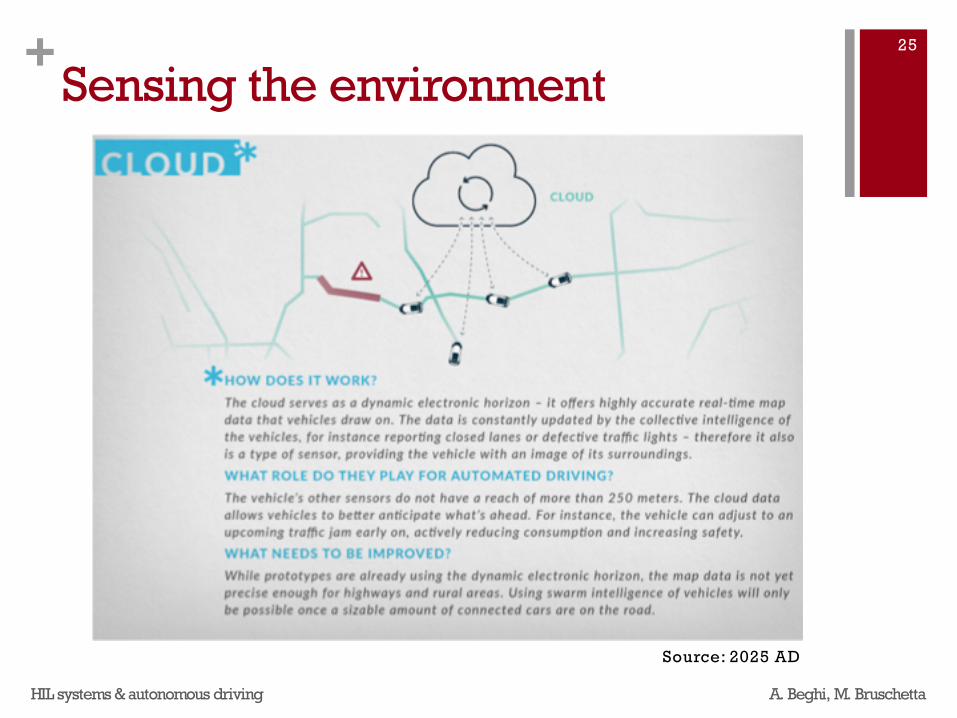
+Sensing the environment
HIL systems & autonomous driving A. Beghi, M. Bruschetta
Source: 2025 AD
25
+The human in the loop
A. Beghi, M. Bruschetta HIL systems & autonomous driving 26
+But … can we really get rid of the human?
HIL systems & autonomous driving A. Beghi, M. Bruschetta
27
§ Humans will still play a crucial role in the design of control systemsfor automated vehicles
§ Fully autonomous cars: human is just a passenger
User experienceComfortSickness…

+But … can we really get rid of the human?
HIL systems & autonomous driving A. Beghi, M. Bruschetta
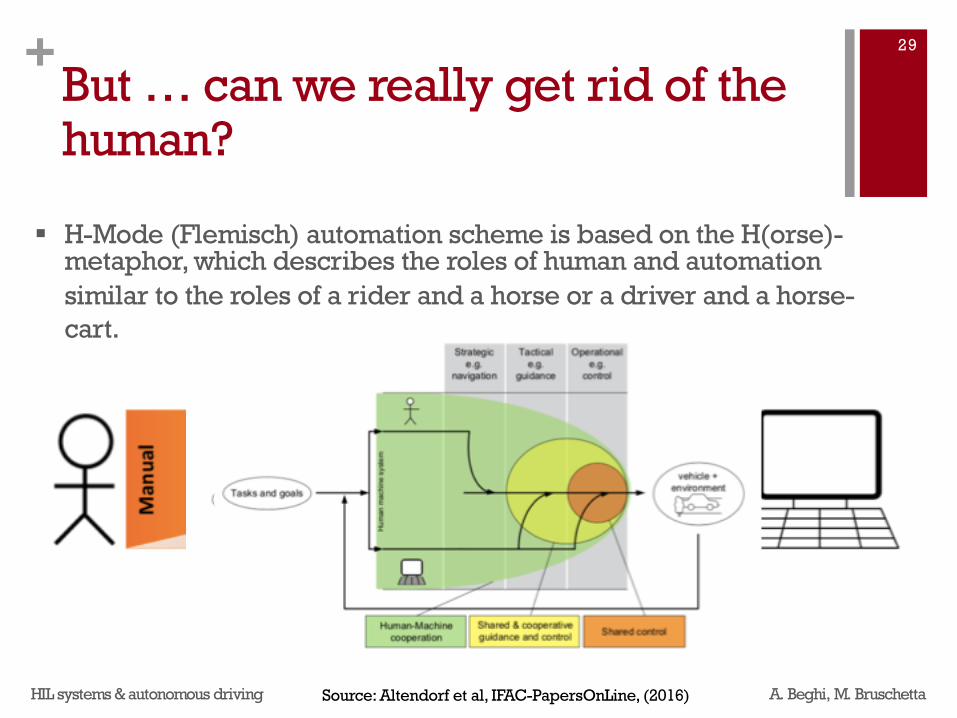
§ Semi-autonomous cars: cooperative guidance & control§ Shared and cooperative guidance and control entails at least two
autonomous entities that need to work together
28
Source: Altendorf et al, IFAC-PapersOnLine, (2016)
+But … can we really get rid of the human?
HIL systems & autonomous driving A. Beghi, M. Bruschetta
§ H-Mode (Flemisch) automation scheme is based on the H(orse)-metaphor, which describes the roles of human and automationsimilar to the roles of a rider and a horse or a driver and a horse-cart.
29
Source: Altendorf et al, IFAC-PapersOnLine, (2016)
+Human-in-the-Loop
HIL systems & autonomous driving A. Beghi, M. Bruschetta
30
§ In automated driving, the human has to be considered a systemcomponent in the control loop
§ As a passenger, it is a part of the system that indirectly affects the control action, as it is associated with «outputs» that do not concernthe task to be executed (i.e., taking the vehicle somewhere)
§ As a part of the (cooperative) control architecture, it activelycollaborates to the task execution
§ Main issues:
1) Modeling2) Sensing

+Human-in-the-Loop
HIL systems & autonomous driving A. Beghi, M. Bruschetta
31
§ Modeling:§ Cognitive processes (including stress and cognitive load)§ Human cognitive representation of the execution of the driving
task§ Perceptual organs (vision, vestibular, somatosensory, …)
§ Perception§ Sensing:
§ Eye-tracking§ BCIs and Functional Near-Infrared Spectroscopy (fNIRS)§ ECG and EEG§ SPR (Skin Potential response)§ …
+Human-in-the-Loop
HIL systems & autonomous driving A. Beghi, M. Bruschetta
32
§ As measuring cannot be intrusive, the key is the derivation of observers and estimators
§ Experiments can be performed in controlled scenarios, with dedicated sensing architectures
§ Models are then derived and used in model-based control approaches, the most promising of which is Model PredictiveControl (MPC)
§ The presence of highly automated vehicles on the streets will notbecome a reality without their control algorithms being thoroughlytested and 'trained' in real-/almost real-life traffic conditions
+Testing is crucial
HIL systems & autonomous driving A. Beghi, M. Bruschetta
33

+Testing is crucial
HIL systems & autonomous driving A. Beghi, M. Bruschetta
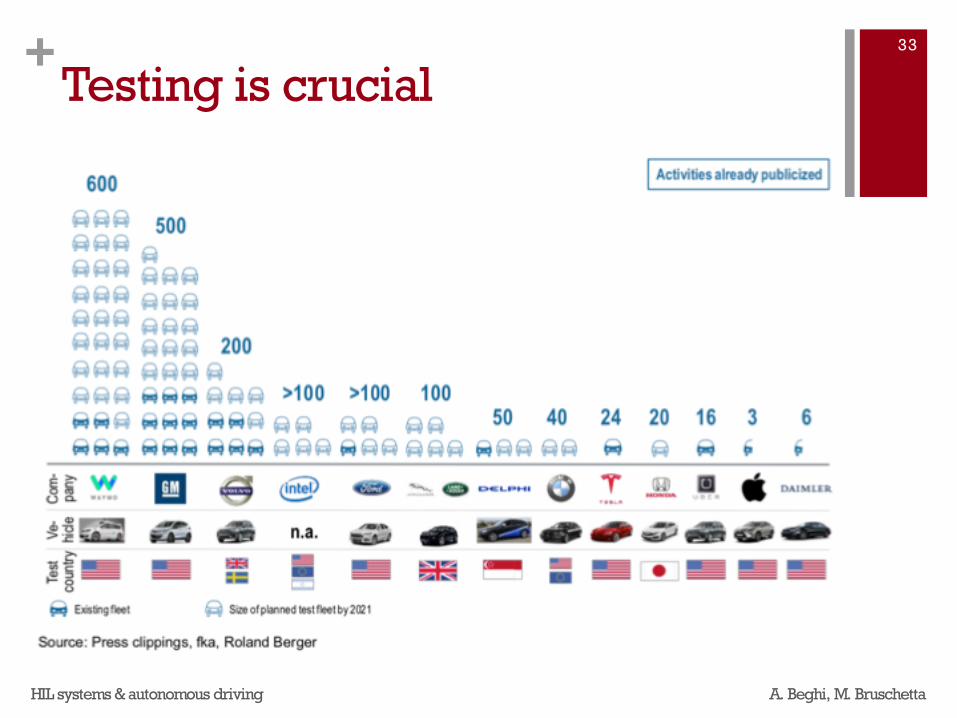
§ Real fleets of physical test cars are going to be indispensable§ However, a lot of knowledge can be gained by using virtual
enviroments:§ Controlled§ Safe
§ Repetible§ More than 95% of the training can be done in the virtual world:
§ Waymo is simulating some 25,000 vehicles simultaneously in virtual versions of actual Austin, Mountain View, and Phoenix streets and on a number of different test routes.
§ More than 12 million Km in the virtual world. § In 2016: virtual Km driven > 3.5 billion§ Over the past 8 years: real Km driven ~ 5 million
34

+Part II: Driving simulators
A. Beghi, M. Bruschetta HIL systems & autonomous driving 35
+Outline
n Part I: Autonomous driving, the scenarion Autonomous vehicles: Hype or real business?
n Getting rid of the human: sensing and actuating
n Human in the loop
n Part II: Driving Simulatorsn Driver Centric Automotive Engineering
n Model Predictive Control
n Virtual Driver
n Motion Cueing Algorithms
HIL systems & autonomous driving A. Beghi, M. Bruschetta
36
+
A. Beghi, M. BruschettaHIL systems & autonomous driving
37
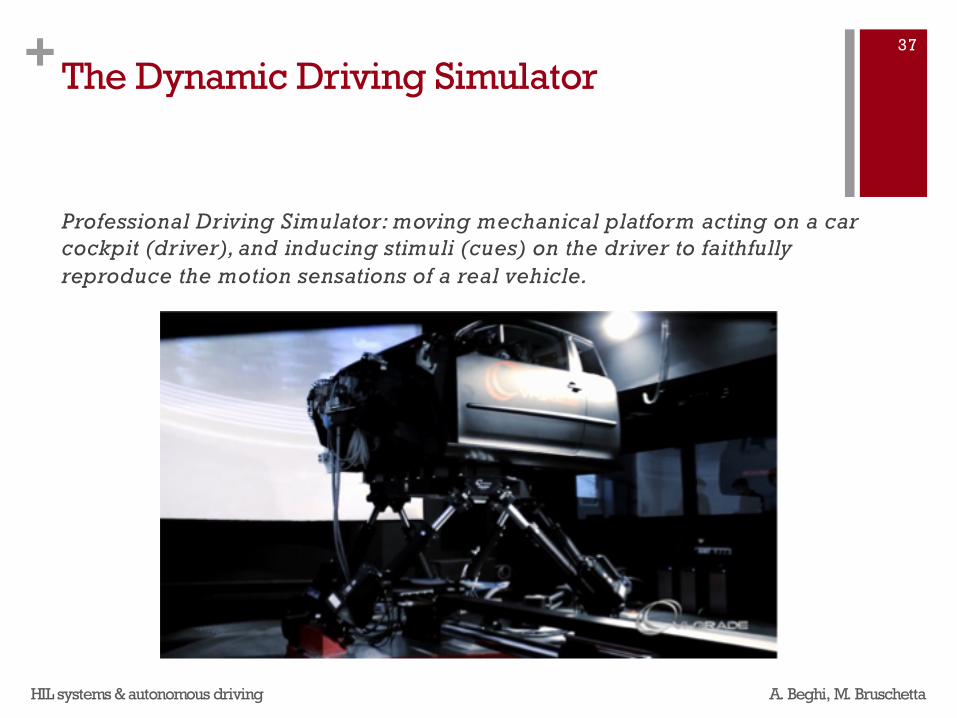
The Dynamic Driving Simulator
Professional Driving Simulator: moving mechanical platform acting on a car cockpit (driver), and inducing stimuli (cues) on the driver to faithfully reproduce the motion sensations of a real vehicle.
+
A. Beghi, M. BruschettaHIL systems & autonomous driving
38
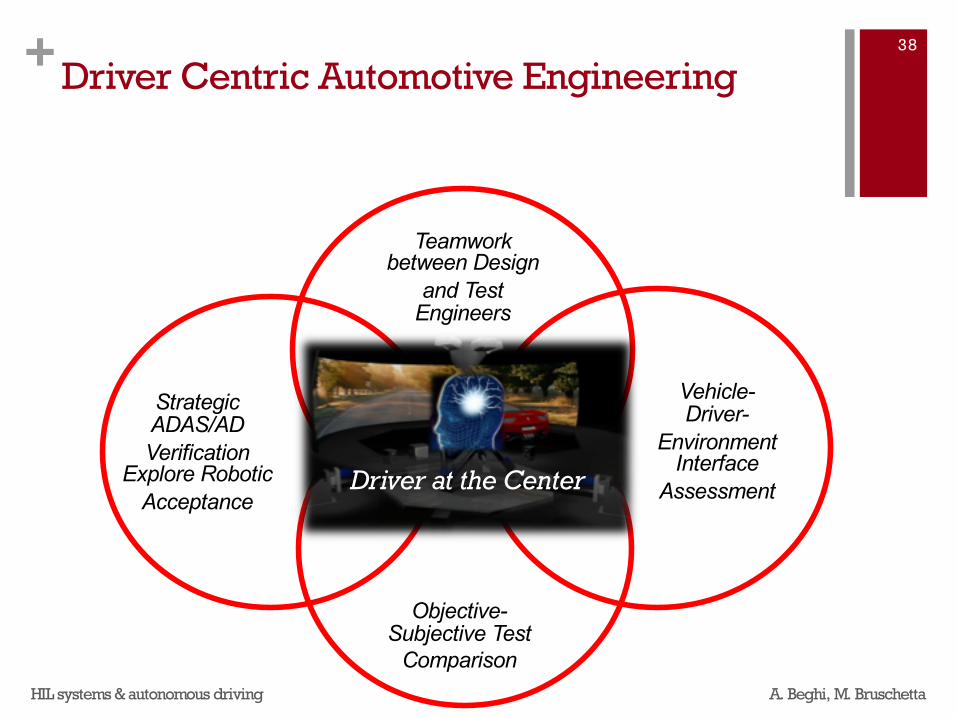
Driver Centric Automotive Engineering
Teamwork between Design
and Test Engineers
Strategic ADAS/AD Verification
Explore Robotic Acceptance
Vehicle-Driver-
Environment Interface
Assessment
Objective-Subjective Test
Comparison
Driver at the Center
+
n Control strategies for dynamic driving simulators are called Motion Cueing Algorithms (MCA)
n MCA is a problem in the problem: to make available a testing tool for HMI control system, a complex HMI control system is needed
n MCA is an extremely challenging Human Machine Interaction problem
n Accounting for human behavioral and cognitive aspects
n Ensuring safety (e.g. limitation on actuators)
n Handling switch of control authority
n Strict Real-time requirements
A. Beghi, M. BruschettaHIL systems & autonomous driving
39
Driving Simulators as a control HMI problem
+
n New paradigm: collaborating with human to improve performance
n Challenges: n Handling switch of control authority
n Ensuring safety (e.g. limitation on forces)
n Accounting for human behavioral and cognitive aspects
n Strict Real-time requirements
n Promising Framework: Model Predictive Control
M. BruschettaDriving Simulator as HMI problem
HIL scenarios
Collaborative roboticsAutonomous driving Dynamic Driving Simulator
+Model Predictive Control
A. Beghi, M. Bruschetta HIL systems & autonomous driving 41
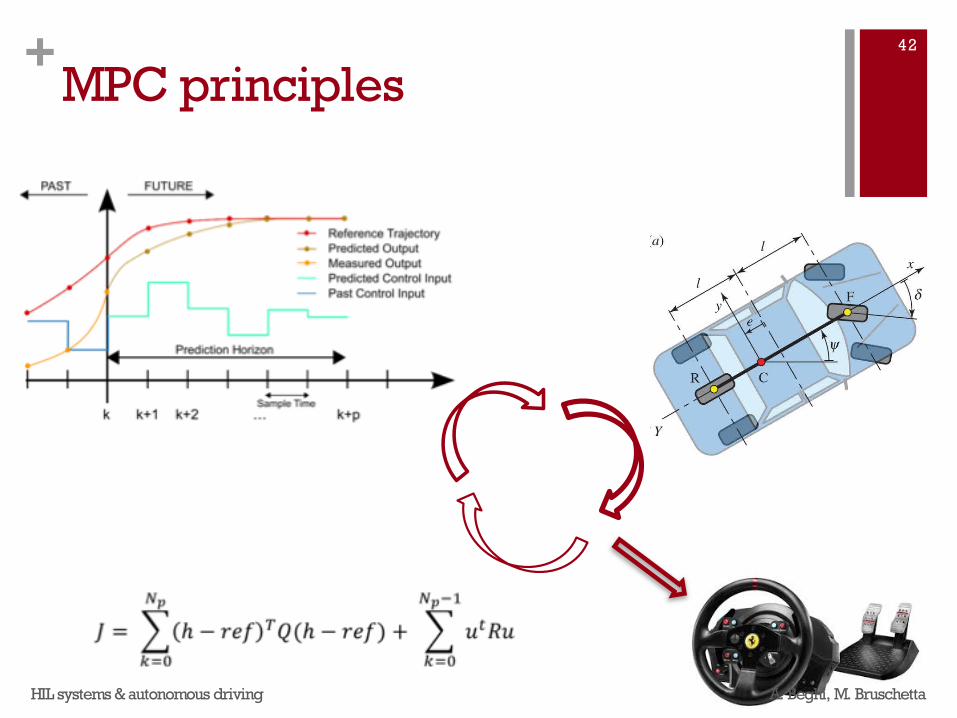
+MPC principles
A. Beghi, M. BruschettaHIL systems & autonomous driving
42
+
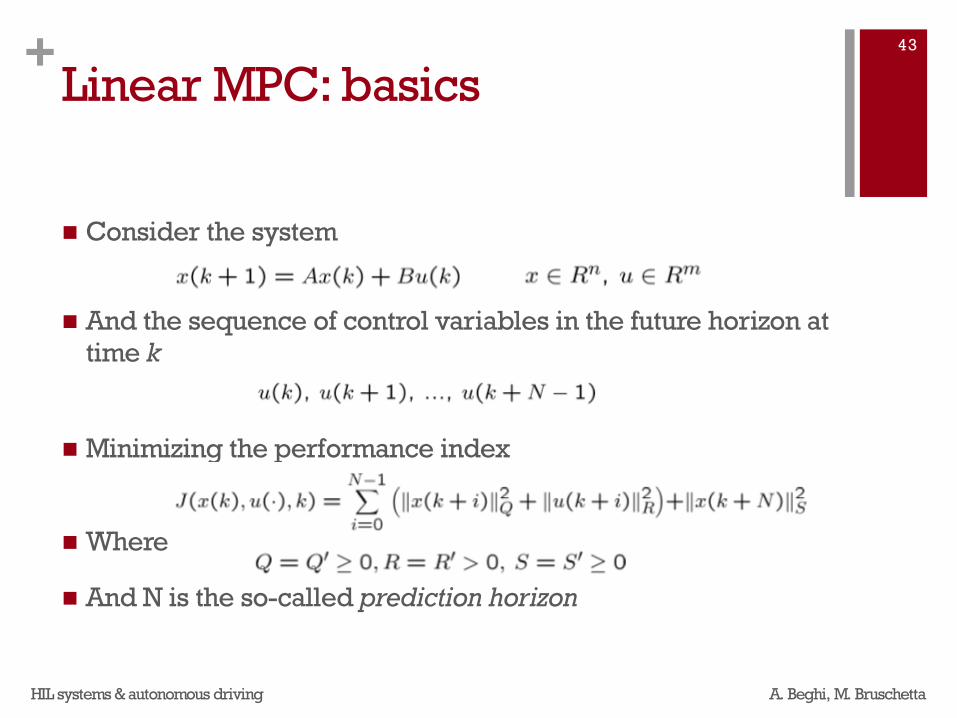
n Consider the system
n And the sequence of control variables in the future horizon at time k
n Minimizing the performance index
n Where
n And N is the so-called prediction horizon
A. Beghi, M. BruschettaHIL systems & autonomous driving
Linear MPC: basics43
+
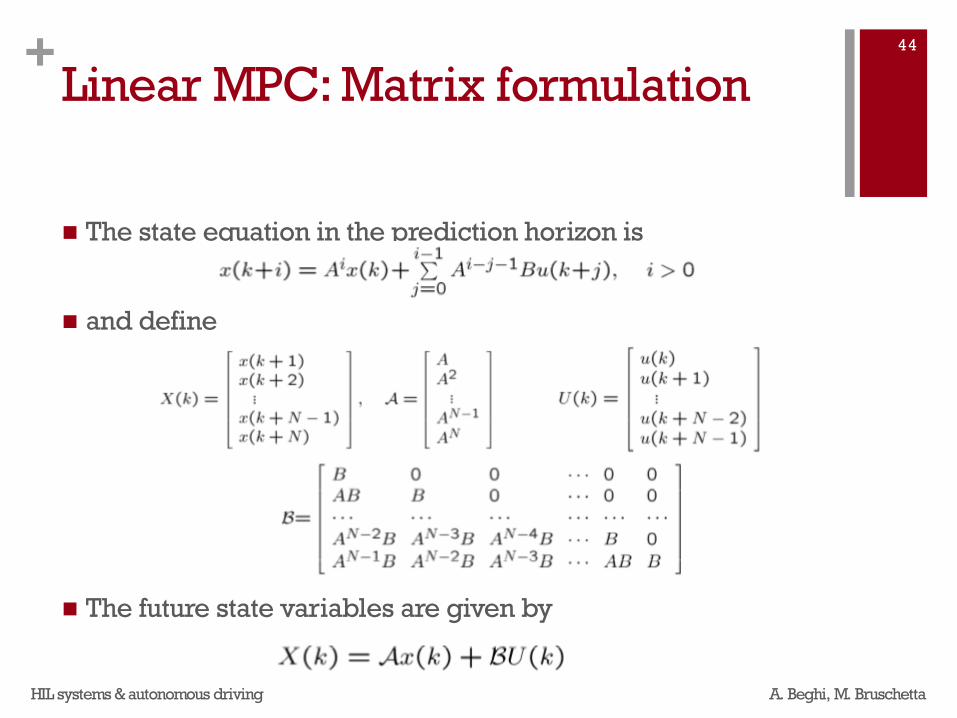
n The state equation in the prediction horizon is
n and define
n The future state variables are given by
A. Beghi, M. BruschettaHIL systems & autonomous driving
Linear MPC: Matrix formulation44
+
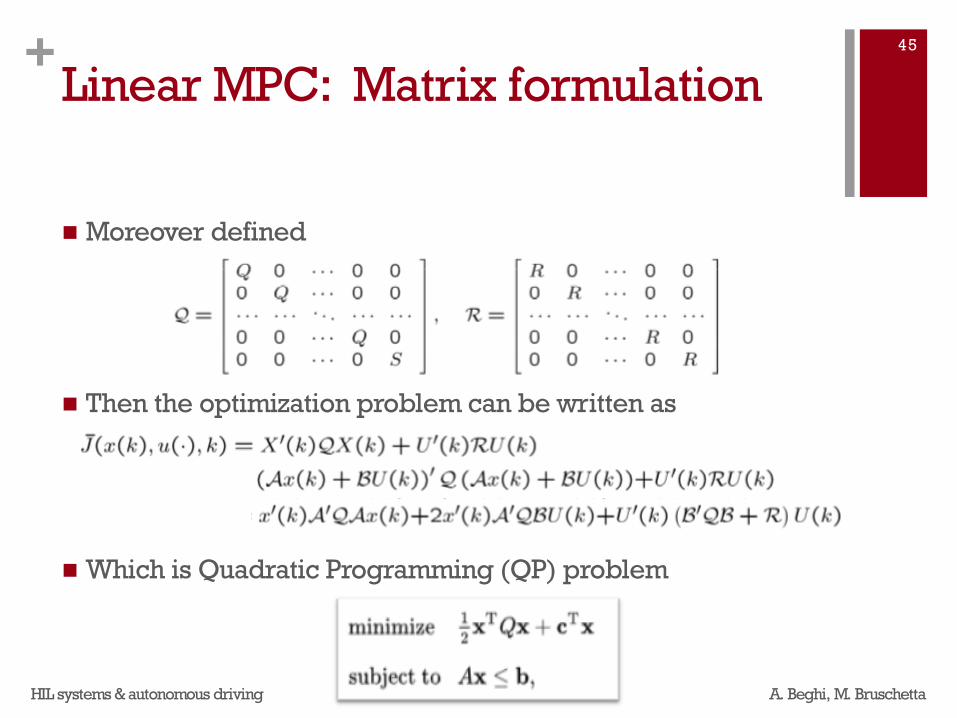
n Moreover defined
n Then the optimization problem can be written as
n Which is Quadratic Programming (QP) problem
A. Beghi, M. BruschettaHIL systems & autonomous driving
Linear MPC: Matrix formulation45

+Nonlinear MPC (MATMPC)
discrete QP
ProblemDirect Multiple Shooting
discrete NLP
Problem
linearization
optimal solution
Non Linear Model
Objective Function
bounds and
constraints
qpOases
Sequential Quadratic Programming (SQP)
discretization QP solution
NLP Problem QP sub-problem
A. Beghi, M. BruschettaHIL systems & autonomous driving
46
+Direct method: Multiple shooting strategy
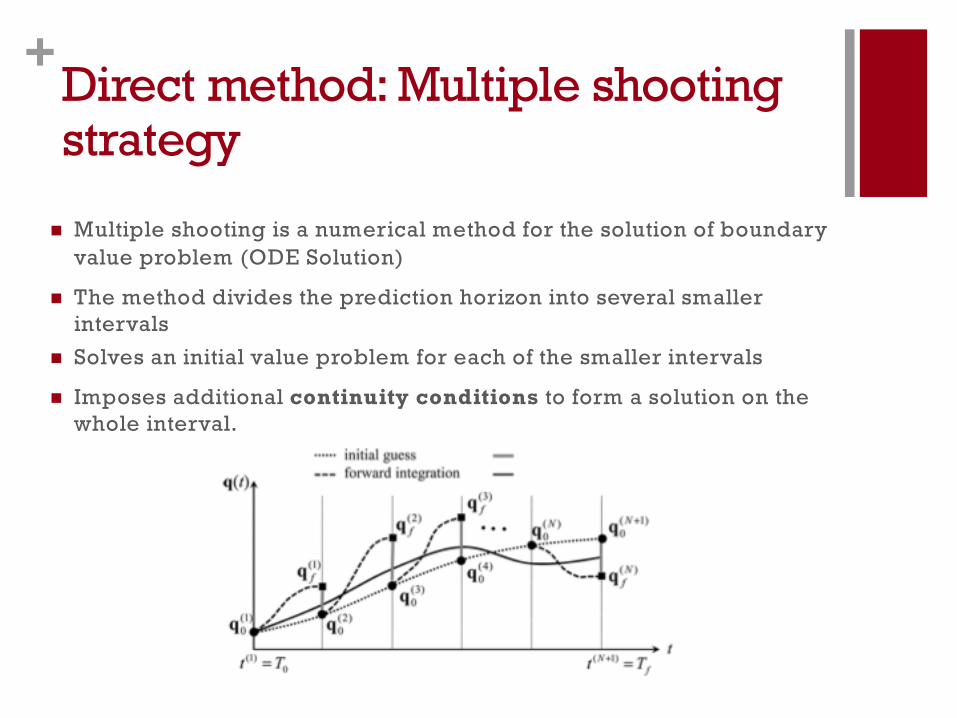
n Multiple shooting is a numerical method for the solution of boundary value problem (ODE Solution)
n The method divides the prediction horizon into several smaller intervals
n Solves an initial value problem for each of the smaller intervals
n Imposes additional continuity conditions to form a solution on the whole interval.

+NMPC Optimization: Multiple shooting strategy
SQP iteration until continuous solution is obtained
+NLP formulation: the discretized problem
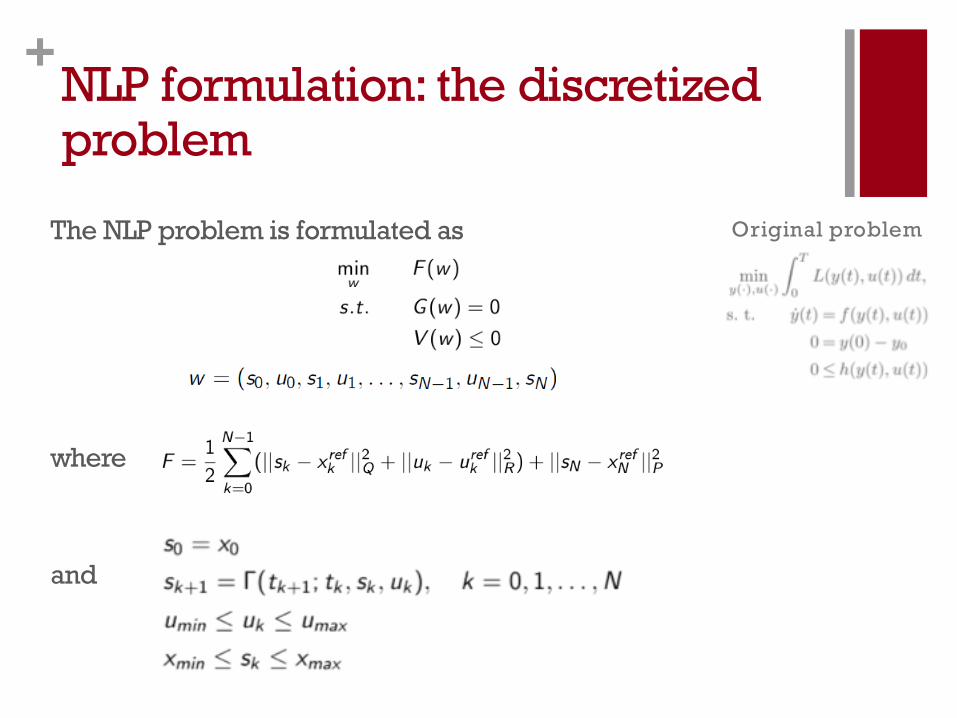
The NLP problem is formulated as
where
and
Original problem

+MPC exampleAutonomous Driver
A. Beghi, M. Bruschetta HIL systems & autonomous driving 51
+
n Testing of passive driving on simulators requires an “autonomous driver”
n Goal is that of taking decisions based on:n Vehicle model (more detailed reference model → more skilled
driver)n Future trajectory and velocity reference n Cost function
n Main advantages:n Coupling of throttle and steer inputs n Driving style tunable through cost function
n Challenge:n Solution of a non linear optimization problem at each time step
Real-Time NMPC based Virtual Driver
A. Beghi, M. BruschettaHIL systems & autonomous driving
52
+Model concept
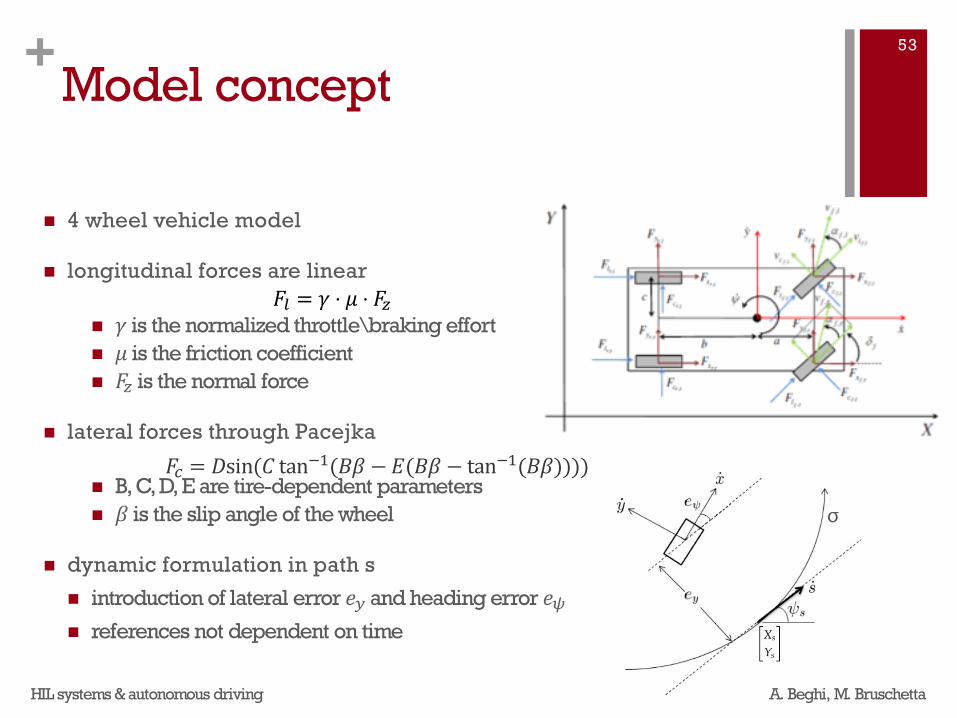
n 4 wheel vehicle model
n longitudinal forces are linear
n ! is the normalized throttle\braking effortn " is the friction coefficientn #$ is the normal force
n lateral forces through Pacejka
n B, C, D, E are tire-dependent parametersn % is the slip angle of the wheel
n dynamic formulation in path s
n introduction of lateral error &' and heading error &(n references not dependent on time
#) = ! ⋅ " ⋅ #$
#, = -sin(2 tan56(7% −9(7% − tan56(7%))))
A. Beghi, M. BruschettaHIL systems & autonomous driving
53
+
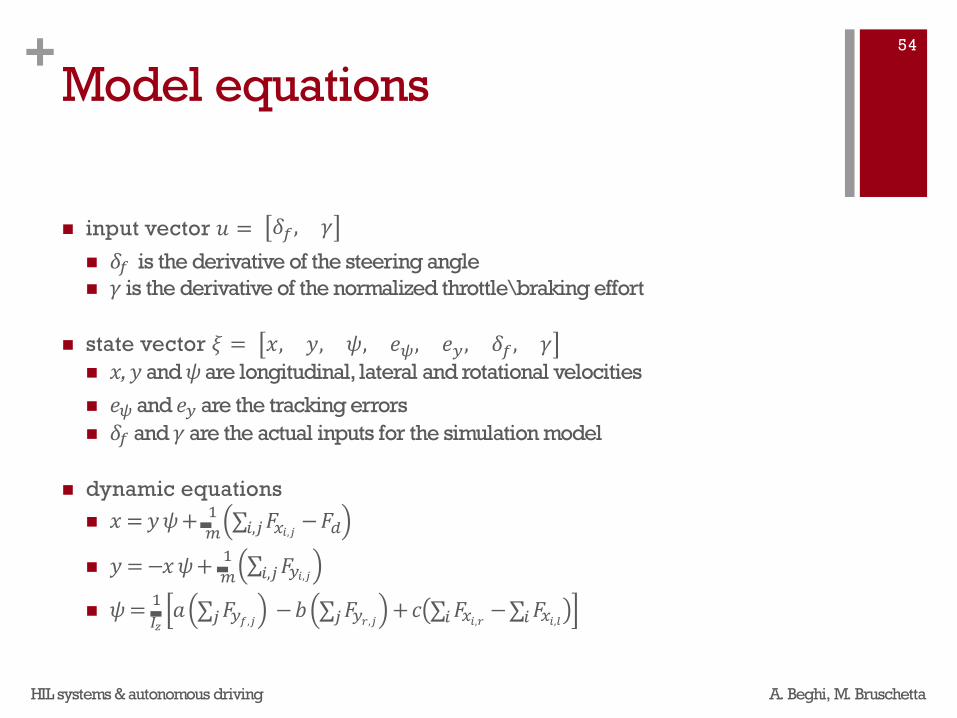
n input vector ! = #$, &n #$ is the derivative of the steering anglen & is the derivative of the normalized throttle\braking effort
n state vector ' = (, ), *, +,, +-, #$, &n (, ) and * are longitudinal, lateral and rotational velocities
n +, and +- are the tracking errorsn #$ and & are the actual inputs for the simulation model
n dynamic equationsn ( =)*+ /
0 ∑2,3456,7 −49n ) =−(*+ /
0 ∑2,34-6,7n *= /
:; < ∑34-=,7 −> ∑34-?,7 +@ ∑2456,? −∑2456,A
Model equations
A. Beghi, M. BruschettaHIL systems & autonomous driving
54

+
n weight matrix is diagonal → " = $%&'()*)
n optimization variables ℎ = -, /0, /̇0, /2+ 4, /̇2n - = 56 + 76: vehicle velocity
n /0 and /2 + 4: position errors (↑ weights → smaller traj tracking error)
n /0 and /2: velocity tracking errors (↑ weights → more conservative behaviour)
Objective Function
The objective function is quadratic
: = ;<=>
?@ℎ−B/C D"(ℎ−B/C)+ ;
<=>
?@EF
GDHG
A. Beghi, M. BruschettaHIL systems & autonomous driving
55

+
n Constant reference velocity (25m/s)
n Controller reduces velocity to balance tracking error and velocity error
Double Lane Change
A. Beghi, M. BruschettaHIL systems & autonomous driving
57
+
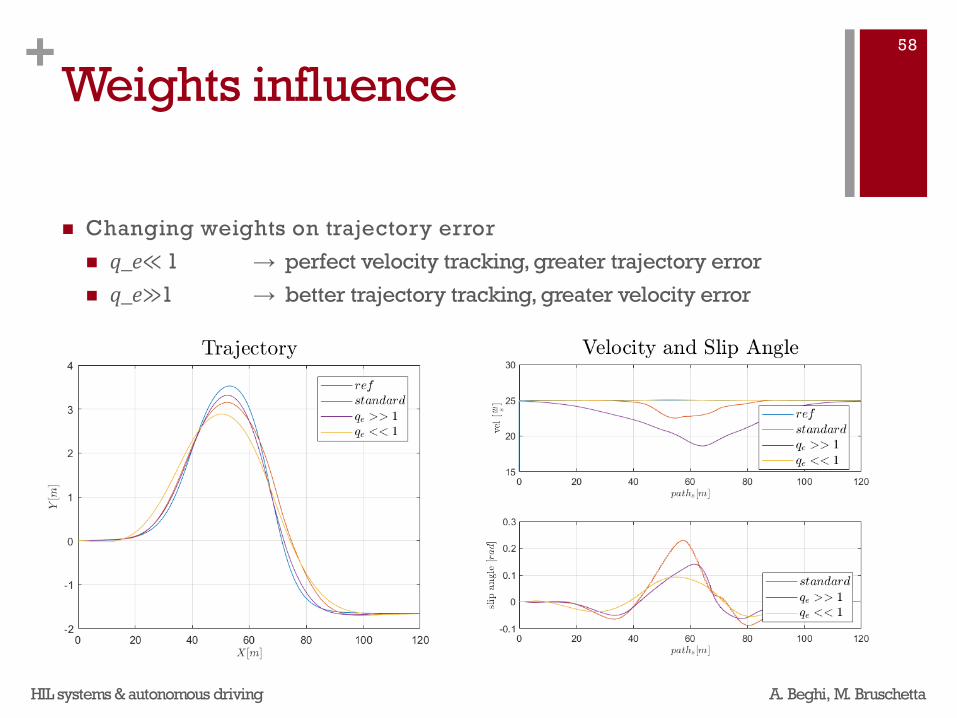
n Changing weights on trajectory error
n !_"≪ 1 → perfect velocity tracking, greater trajectory error
n !_"≫1 → better trajectory tracking, greater velocity error
Weights influence
A. Beghi, M. BruschettaHIL systems & autonomous driving
58
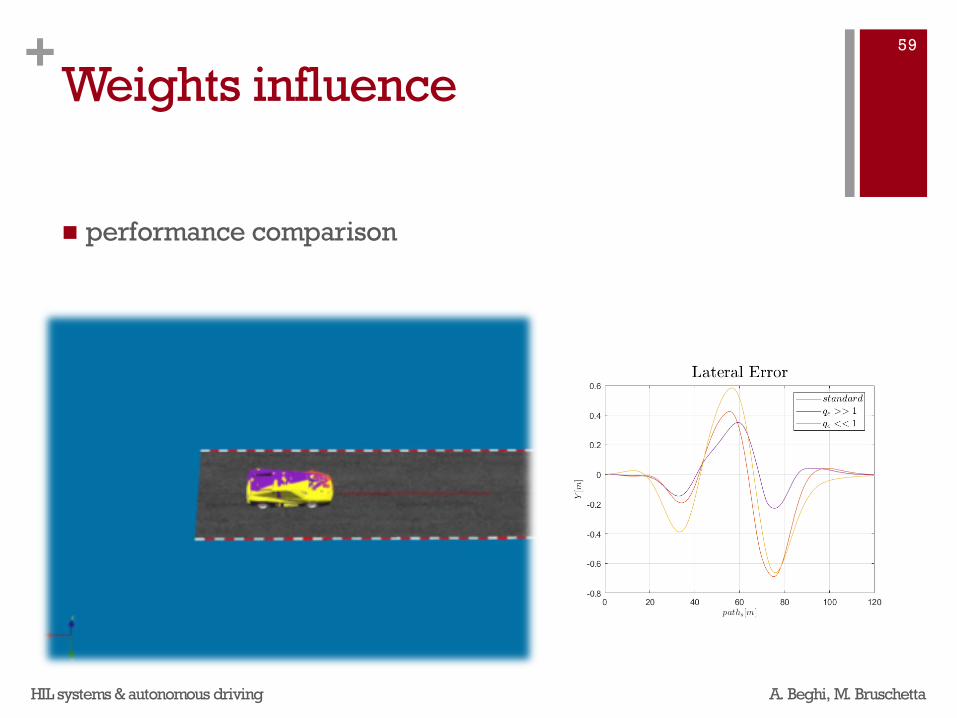
+
n performance comparison
Weights influence
A. Beghi, M. BruschettaHIL systems & autonomous driving
59
+MPC Driver vs Basic Driver
A. Beghi, M. BruschettaHIL systems & autonomous driving
60

+Motion Cueing Algorithm
A. Beghi, M. Bruschetta HIL systems & autonomous driving 61
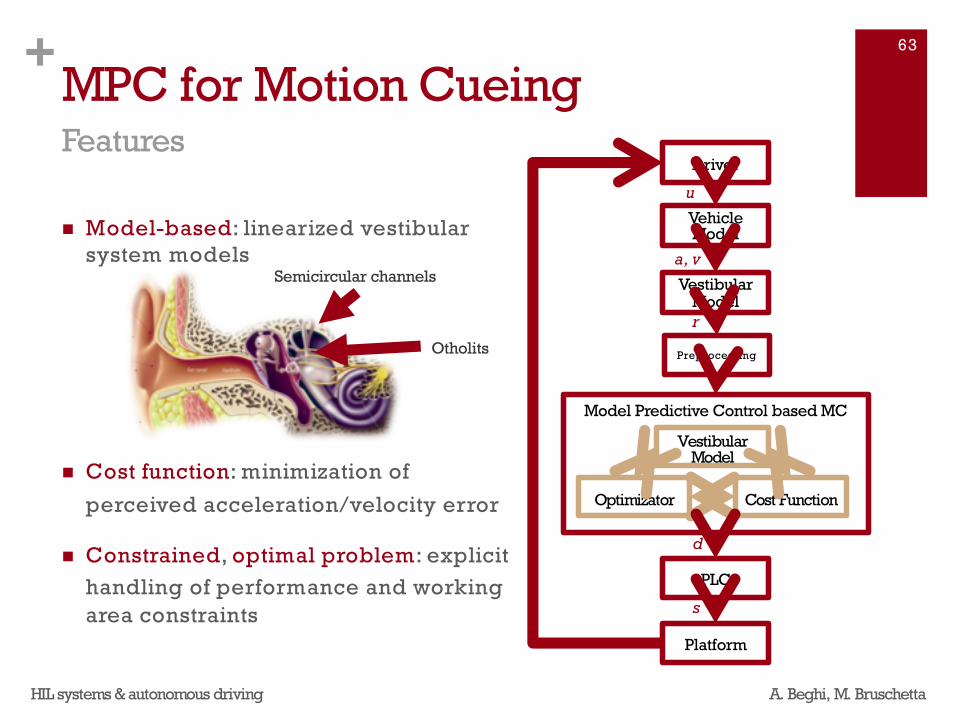
+MPC for Motion Cueing
n Model-based: linearized vestibularsystem models
n Cost function: minimization of
perceived acceleration/velocity error
n Constrained, optimal problem: explicithandling of performance and workingarea constraints
Features
HIL systems & autonomous driving A. Beghi, M. Bruschetta
Vehicle Model
Vestibular Model
Model Predictive Control based MC
Vestibular Model
Cost FunctionOptimizator
PLC
Driver
Platform
a, v
r
d
u
s
Preprocessing
63
Semicircular channels
Otholits
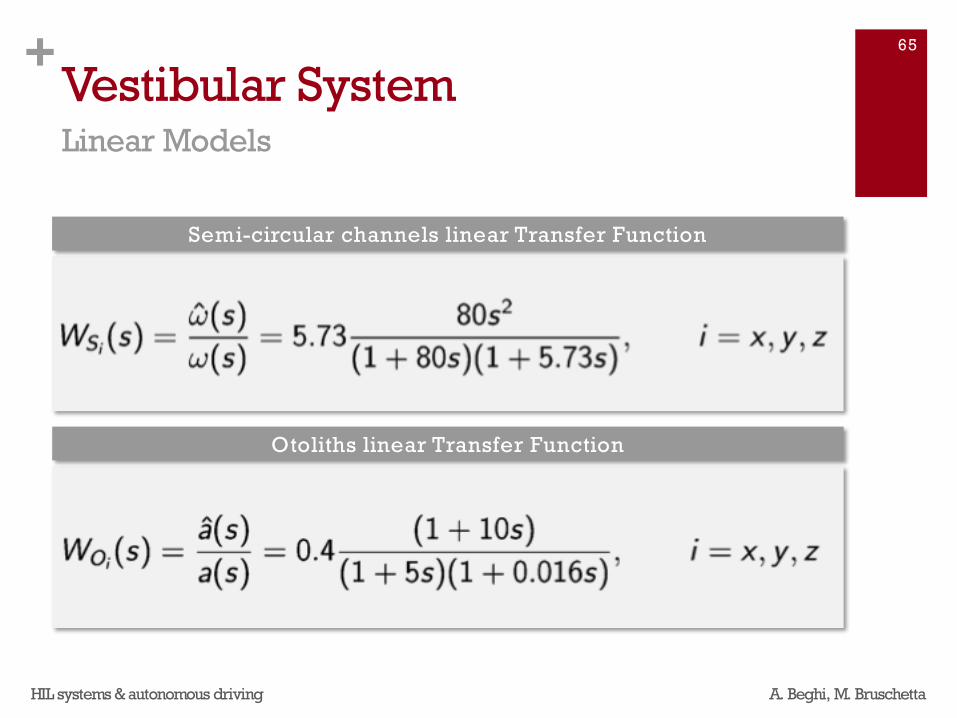
+Vestibular SystemLinear Models
Semi-circular channels linear Transfer Function
Otoliths linear Transfer Function
HIL systems & autonomous driving A. Beghi, M. Bruschetta
65
+Vestibular System
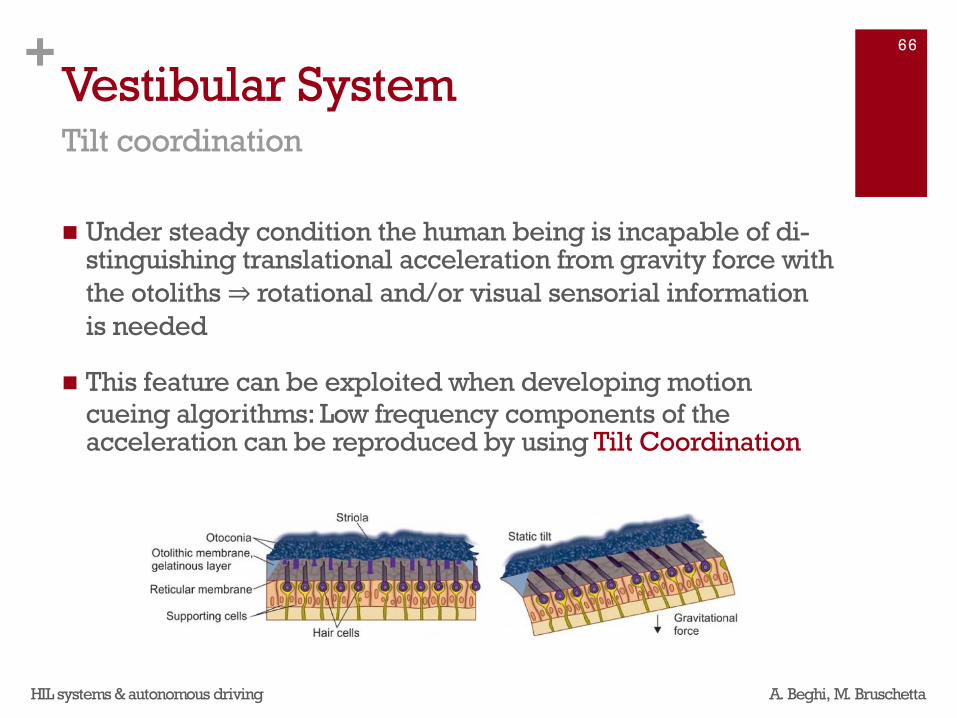
n Under steady condition the human being is incapable of di-stinguishing translational acceleration from gravity force with the otoliths ⇒ rotational and/or visual sensorial information is needed
n This feature can be exploited when developing motion cueing algorithms: Low frequency components of the acceleration can be reproduced by using Tilt Coordination
Tilt coordination
HIL systems & autonomous driving A. Beghi, M. Bruschetta
66

+MPC: Objective function
The structure of the objective function defines the control objectives
n y are the tracking signals
n r are the reference signals to be tracked, constant along the horizon
n qy , qu , q∆ are the weights, M are the platform limits
n x are the states
n u are the inputs for the platform control system
Parameters
HIL systems & autonomous driving A. Beghi, M. Bruschetta
67

+
n The reference signal in well tracked within the platform limits
A. Beghi, M. BruschettaHIL systems & autonomous driving
Experimental data68
+
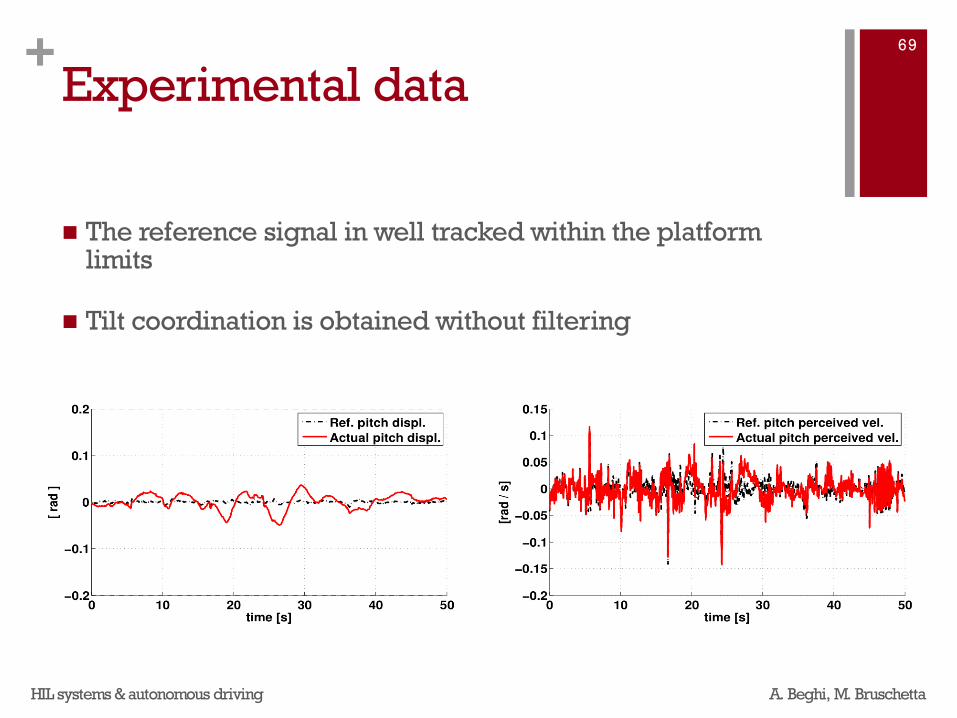
n The reference signal in well tracked within the platform limits
n Tilt coordination is obtained without filtering
A. Beghi, M. BruschettaHIL systems & autonomous driving
Experimental data69

+Time-varying PredictiveMCA
A. Beghi, M. Bruschetta HIL systems & autonomous driving 70

+Prediction strategy: Non look Ahead (NLA) vs Look Ahead (LA)
A. Beghi, M. Bruschetta
n A short constant reference is usedPros:n Reduced computational burdenCons:n Limited platform exploitation
n Use a long prediction window using an estimation of the future driver’s behavior
Pros:n Virtual enlargement of the platform
operational spaceCons:n Knowledge about the future driver behavior is
needed
NLA
LA
HIL systems & autonomous driving
71

+
A. Beghi, M. Bruschetta
The reference manipulation
!a# $ + & = ( )a* $ & = 1 … -.$/0 !1 $ + & & = -. … -2,/0
)a $ :reference from current driver behavior!1:reference from benchmark lap$/0: gain to modulate the reference !1 , $/0 ∈ [0 ÷ 1]-.: samples in the constant reference part-2,//0: samples in the overall reference
n The reference is composed by two partsn A constant one equal to the
current driver behavior )a* $n A time varying one equal the
expected driver behavior !1 $ + &
n LA on behalf of NLA: if the time varying phase is set to zero, only the current information is used by the algorithm, as in the NLA case.
HIL systems & autonomous driving
72
+A new cost function
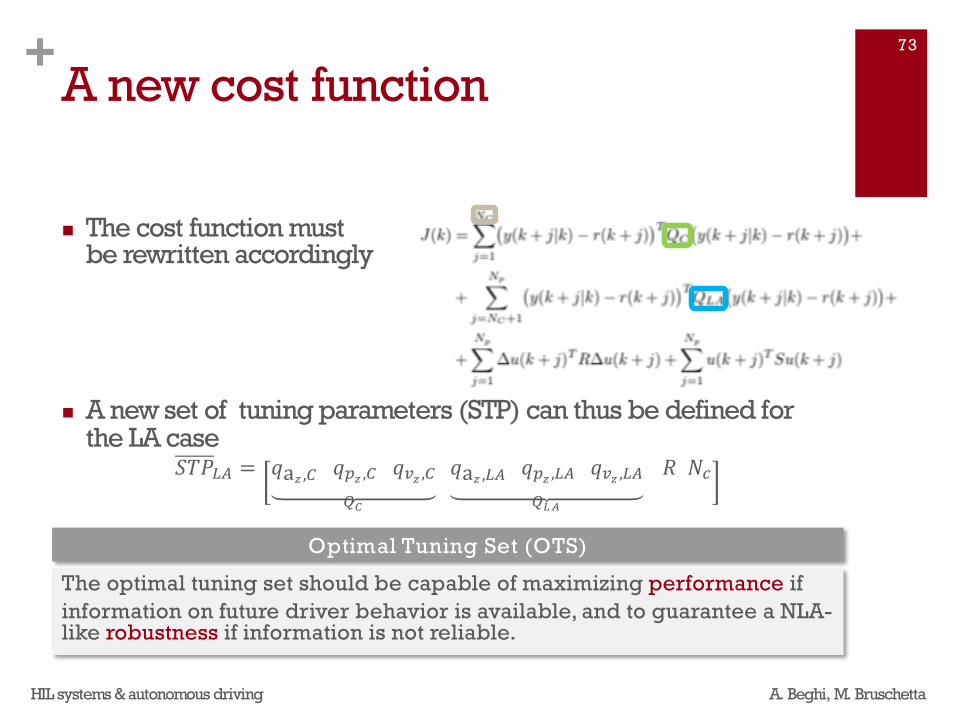
n The cost function must be rewritten accordingly
n A new set of tuning parameters (STP) can thus be defined for the LA case
!"#$% = 'a) ,+ ',) ,+ '-) ,+./
'a) ,$% ',) ,$% '-) ,$%.01
2 34
A. Beghi, M. Bruschetta
The optimal tuning set should be capable of maximizing performance if information on future driver behavior is available, and to guarantee a NLA-like robustness if information is not reliable.
Optimal Tuning Set (OTS)
HIL systems & autonomous driving
73

+
n Assume K to be the input gain to the MPC based MC: greater is K more effective is the MCA
n If !"# = 1 the future information is used and a greater K is expected to be allowed
n If !"# = 0 the algorithm is required to properly track the current driver behavior, i.e.
n A Multi-Objective optimization can be performed on
A. Beghi, M. Bruschetta
Metrics for Multi-Objective optimization
'"# (), +) ,-."# ≜ max3∈ℝ6
78. :. ;<= − ?@A B
≤ 0.05
E"#{(),7|,-."#} ≜ ;I<= − I@A B
CL: Current LapBL: Benchmark LapMCL: Most Challenging Lap0,05J/8L: perception threshold
HIL systems & autonomous driving
Vehicle Model
Vestibular Model
Model Predictive Control based MC
Vestibular Model
Cost FunctionOptimizator
PLC
Driver
Platform
a, v
r
d
u
s
Gain K
arg minQRSTU
VW,1VL
VW = E"# {X()|.-,"# }
VL = '"# X(), X() .-,"#
75
+
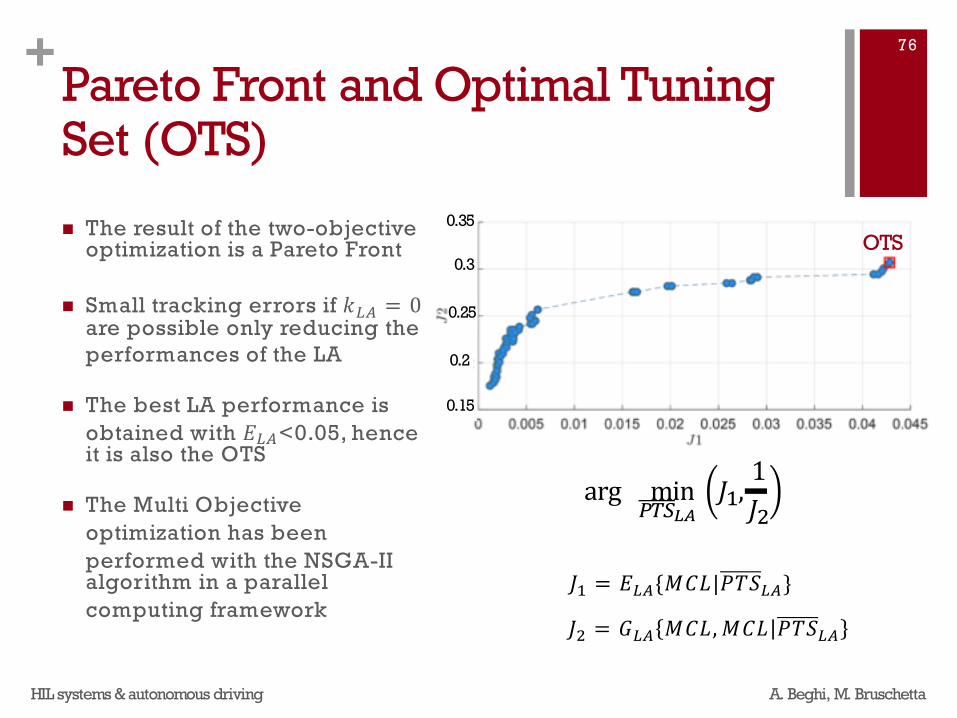
n The result of the two-objective optimization is a Pareto Front
n Small tracking errors if !"# = 0are possible only reducing the performances of the LA
n The best LA performance is obtained with &"#<0.05, hence it is also the OTS
n The Multi Objective optimization has been performed with the NSGA-II algorithm in a parallel computing framework
A. Beghi, M. Bruschetta
Pareto Front and Optimal Tuning Set (OTS)
'( = &"#{*+,|./0"#}'2 = 3"# *+,, *+, ./0"#
arg min;<=>?'(,1'2
A/00.35
0.3
0.15
0.2
0.25
OTS
HIL systems & autonomous driving
76

+
A. Beghi, M. Bruschetta
Data set (DS)
n 12 laps on the Calabogie track have been performed with a virtual driver varying:
n Trajectory:
n Center line
n Corner Cutting
n Corner Cutting on Kerbs
n Grip : {1, 0.8, 0.6, 0.4} are used where 1 is the standard level. With small grip values unexperienced drivers are emulated. Using
grip 0.4 the lap time is increased of almost 20 s.
n The MCL is the Corner Cutting on Kerbs with grip 0.8
HIL systems & autonomous driving
77
+
A. Beghi, M. Bruschetta
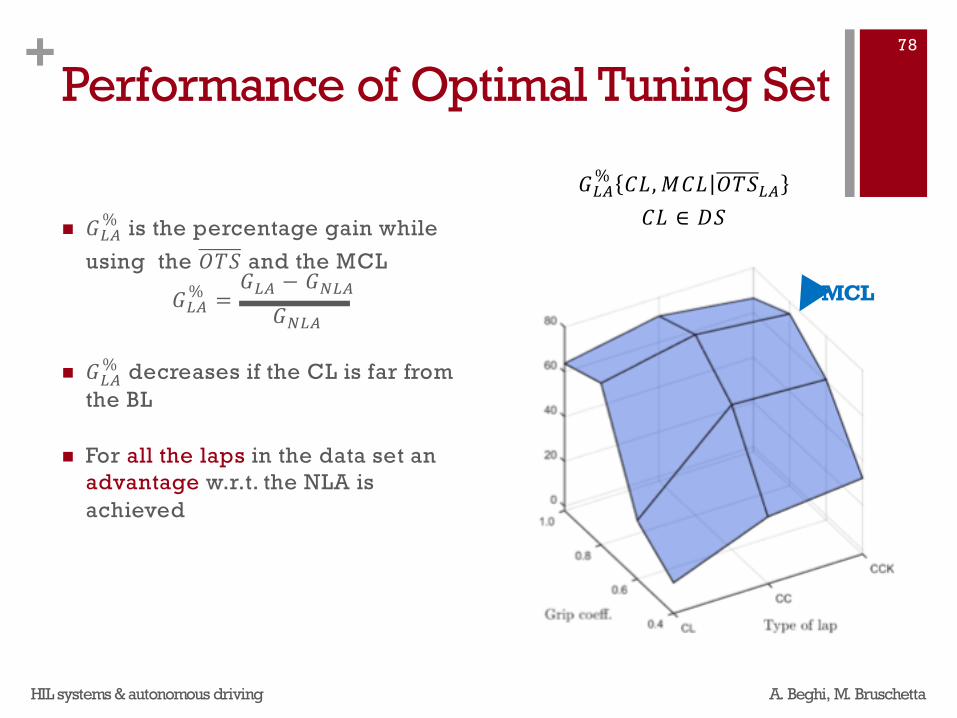
Performance of Optimal Tuning Set
n !"#% is the percentage gain while
using the %&' and the MCL
!"#% = !"# − !*"#!*"#
n !"#% decreases if the CL is far from the BL
n For all the laps in the data set an advantage w.r.t. the NLA is achieved
!"#% +,, .+, %&'"#+, ∈ 0'
MCL
HIL systems & autonomous driving
78
+
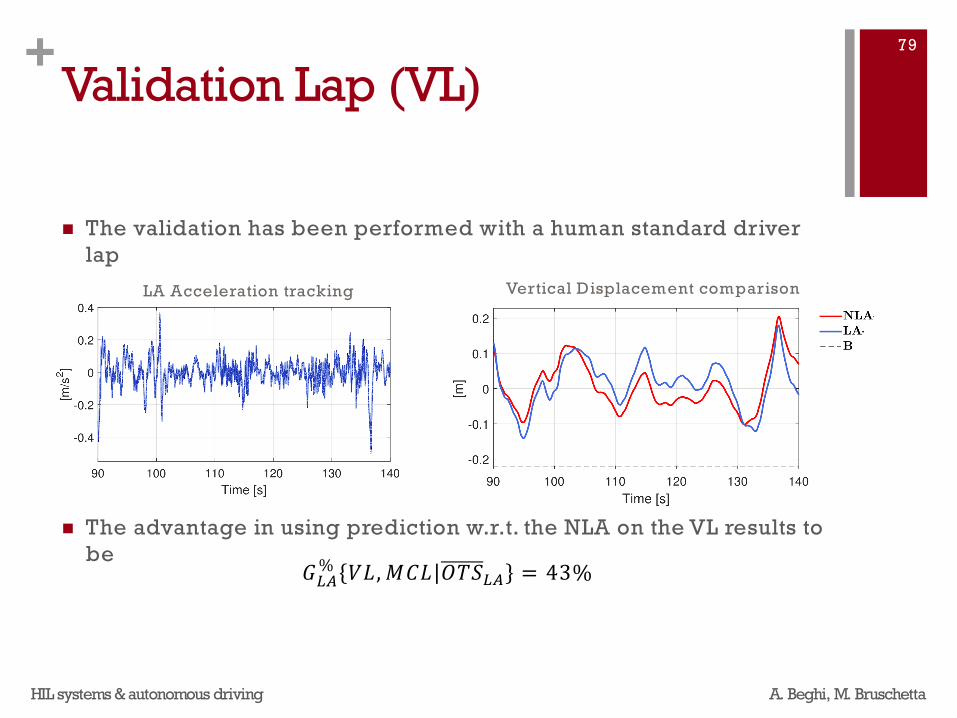
n The validation has been performed with a human standard driver lap
n The advantage in using prediction w.r.t. the NLA on the VL results to be
A. Beghi, M. Bruschetta
Validation Lap (VL)
LA Acceleration tracking Vertical Displacement comparison
!"#% %&, ()& *+,"# = 43%
HIL systems & autonomous driving
79
+
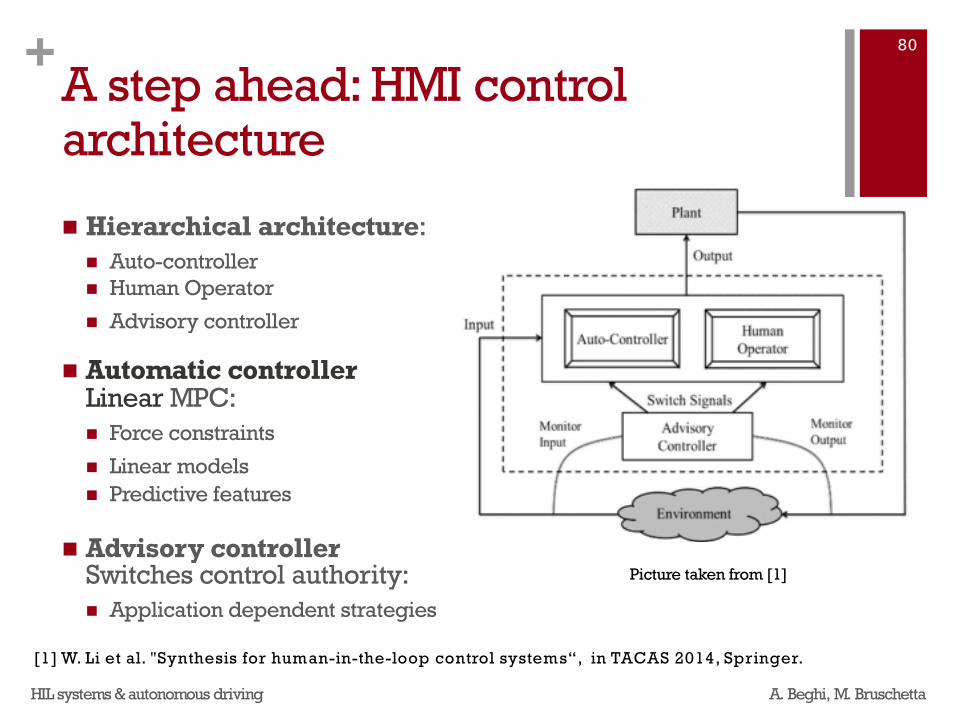
n Hierarchical architecture:n Auto-controllern Human Operator
n Advisory controller
n Automatic controller Linear MPC:n Force constraints
n Linear modelsn Predictive features
n Advisory controllerSwitches control authority:n Application dependent strategies
A. Beghi, M. BruschettaHIL systems & autonomous driving
A step ahead: HMI control architecture
[1] W. Li et al. "Synthesis for human-in-the-loop control systems“, in TACAS 2014, Springer.
Picture taken from [1]
80

+
n Autonomous driving is a very relevant control application, both for its societal and market impact, and for its research content
n Sensing and actuating strategies have to be interpreted in a non-trivial way, due to the presence of the human in the loop
n Control architectures for cooperative guidance & control pose new challenges, associated with modeling the human/robot interraction for exchange of control authority
n MPC is a valuable tool for tackling many of the aforementioned problems
n Challenges include real-time performance and inclusion of non standard (e.g. learning based) models in the MPC framework
A. Beghi, M. BruschettaHIL systems & autonomous driving
81
Conclusions





























