Embed Size (px)
Citation preview

Servo Motor Diagnostics using Anomaly Detection
Bumsoo Park, Haedong Jeong and Seungchul Lee*
UNIST

Contents
• Monitoring Systems for Robot Diagnosis
• Prognostics and Health Management (PHM) for robot
• Simulation Study
–Model-based Fault Detection and Isolation (FDI)
• Servo Motor Demonstration and Comparison
–Model-based FDI
– Unsupervised Learning
• Conclusion
2

Contents
• Monitoring Systems for Robot Diagnosis
• Prognostics and Health Management (PHM) for robot
• Simulation Study
–Model-based Fault Detection and Isolation (FDI)
• Servo Motor Demonstration and Comparison
–Model-based FDI
– Unsupervised Learning
• Conclusion
3

Industrial Robots
• Increased robot usage on factory
• Breakdown of robot – 2015 GM Russia Operation Breakdown for 2 Months
• Losses over $100 million
• Approximately $1.6 million a day
4

Contents
• Monitoring Systems for Robot Diagnosis
• Prognostics and Health Management (PHM) for robot
• Simulation Study
–Model-based Fault Detection and Isolation (FDI)
• Servo Motor Demonstration and Comparison
–Model-based FDI
– Unsupervised Learning
• Conclusion
5

• Key component
– Servo motor
• Dynamic movement (6-axis)
Prognostics and Health Management (PHM)
6
PHM
Hardware Redundancy
Analytic Redundancy
Output Estimation
Parity Space Parameter Estimation
Observer
Unsupervised Learning
Supervised Learning
Data-driven Model-based
Residual Generation

Prognostics and Health Management (PHM)
• Difficult to attach sensors due to dynamic movement of the arm – Mostly existing instrumentation are used (Encoder, Torque)
• In may cases, failure data is not available
7
Hardware Redundancy
Analytic Redundancy
Output Estimation
Parity Space Parameter Estimation
Observer
Unsupervised Learning
Supervised Learning
Data-driven Model-based
Residual Generation
PHM

Contents
• Monitoring Systems for Robot Diagnosis
• Prognostics and Health Management (PHM) for robot
• Simulation Study
–Model-based Fault Detection and Isolation (FDI)
• Servo Motor Demonstration and Comparison
–Model-based FDI
– Unsupervised Learning
• Conclusion
8

DC Motor Position: System Modeling
• System representation in state space
9
http://ctms.engin.umich.edu/CTMS/index.php?example=MotorPosition§ion=SystemModeling
0 1 0 0
0 0
0 1
1 0 0
db J K J V Ff
dti K L R L i L
y
i
: angle
: armature current
: volatage
: moment of intertia of the rotor
: motor viscous friction constant
: motor torque constant
: electric resistance
: electric inductance
: fault matrix
: fault
i
V
J
b
K
R
L
F
f

Fault Modeling and Residual Design
• Fault modeling
– Physically a load torque that acts on the inertia of the motor
• Residual Design
– Parameter estimation from output error (Luenberger observer)
10
Fault Observer Residual
ˆ ˆ ˆ( )
ˆ ˆ
x Ax Bu L y Cx
y Cx
ˆy y C 0 1 0
( ) : General Fault
TF
f t
y
y
: fault transition matrix

Contents
• Monitoring Systems for Robot Diagnosis
• Prognostics and Health Management (PHM) for robot
• Simulation Study
–Model-based Fault Detection and Isolation (FDI)
• Servo Motor Demonstration and Comparison
–Model-based FDI
– Unsupervised Learning
• Conclusion
11

Image Specifications
Arduino
UNO
ATmega328 Microcontroller, 32KB Flash Memory, 16MHz Clock Speed, 14
Digital 1/O Pins
HS-311 Servo Motor
Cored motor type, 4 slider potentiometer drive, 24 tooth spline
style output shaft
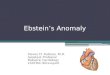
Demo Specifications
• System configuration – Arduino UNO
– Servo motor
• Load generation – Anomaly is induced through manual press
12
Servo Motor Testbed
Operations Repetitive movement (0 - 180 degree)
Sensor Internal encoder
Sample Rate 50 Hz

Demo for Model-based FDI
• Residual = sum of magnitude of parameter
13

• Unsupervised Learning – Selected Feature:
– Normal state training: Gaussian distribution
– Decision Making: Mahalanobis distance
Demo for Unsupervised Data-driven Method
14
[ ] [ ]u k y k
Th
reshold

Data-driven vs. Model-based
15
Fault: Physical Defect
Data-driven
Feature
Anomaly Detection
Classification
Training Process
Model-based
Residual
Fault Detection
Fault Isolation
Modeling Process
System
Data-Driven
Unsupervised Learning
Training Process
Decision Making
Anomaly Detection
Observer based
System & Fault Modeling
Decision Making
Fault Detection
Model-based

Fault: Physical Defect
System
Data-driven vs. Model-based
16
Data-driven
Feature
Anomaly Detection
Classification
Training Process
Model-based
Residual
Fault Detection
Fault Isolation
Modeling Process
Data-Driven
Unsupervised Learning
Training Process
Decision Making
Anomaly Detection
Observer based
System & Fault Modeling
Decision Making
Fault Detection
Model-based

• Data-driven methods
– Normal states based on feature
• Model-based methods
– Normal states based on residual
Data-driven vs. Model-based
17
Training Process System & Fault Modeling
• Acquire normal data • Feature extraction
• Represents normal state • Normal state cluster in feature space
• System representation
• Fault Modeling
• Residual Design
[ 1] [ ] [ ]
[ ] [ ]
x k Ax k Bu k
y k Cx k
0 if no fault residual =
0 if fault exists
Feature3
0 100 200 300 400 500 600 700 800 900 1000-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Data Number
Am
plit
ud
e
Time Signal
Data Feature
( ) ( )[ ] n nj jj n k j n k
n n
n
f k R e e R e e

Data-driven vs. Model-based
• Classify the state – based on the similarity of the predefined normal state
• Similarity can be represented differently
18
Data-Driven
Unsupervised Learning
Training Process
Decision Making
Anomaly Detection
Observer based
System & Fault Modeling
Decision Making
Fault Detection
Model-based

• Classify the state – based on the similarity of the predefined normal state
• Similarity can be represented differently
Data-driven vs. Model-based
19
Decision Making (Classification)
• Mahalanobis Distance • Statistical distance of two points
• Residual-based threshold
1( ) ( )TD x x Anomaly
0 if no fault residual =
0 if fault exists

Conclusion
• Importance of robot diagnosis has increased
– More robots are being adopted
– Servo motors are the key component of robots
• Anomaly detection and fault detection
– Unsupervised learning (Mahalanobis distance)
– Model-based fault detection (Observer-based residual)
20
Data-driven Model-based
Training/ Modeling
• Define normal state
Feature/ Residual
Decision Making
[ 1] [ ] [ ] [ ]
[ ] [ ]
x k Ax k Bu k Ff k
y k Cx k
ˆ[ 1] [ 1]y k y k
Feature3
0 100 200 300 400 500 600 700 800 900 1000-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Data Number
Am
plit
ud
e
Time Signal
[ ] [ ]u k y k
1( ) ( )TD x x 0 if no fault
residual0 if fault exists