Embed Size (px)
Citation preview

Sistemas Lineares e
Invariantes de Tempo Discreto
28

Sistemas Lineares de Tempo Discreto
• Um sistema linear satisfaz o teorema da superposição e
implica que o sistema tem condições iniciais iguais a zero e
que a equação do sistema envolva apenas operadores
lineares.
• Pode–se utilizar a superposição para um sistema com
condições iniciais distintas de zero, se o sistema for linear.
Neste caso, deve-se considerar o sistema como tendo
entradas múltiplas e as condições iniciais como entradas
adicionais.
29
Sistemas Lineares de Tempo Discreto
• Como resultado, a resposta de um sistema pode ser obtida
a partir da soma de uma resposta de entrada zero (devido
apenas às condições iniciais) e uma resposta de estado zero
(devido apenas à entrada).
• Este princípio de decomposição, permite analisar sistemas
lineares na presença de condições iniciais distintas de zero.
Tanto a entrada quanto a resposta de estado zero
obedecem à superposição.
30

Sistemas Invariante de Tempo Discreto
• Em um sistema invariante de tempo discreto a forma da
resposta y[n] depende unicamente da forma da entrada
x[n] e não do instante de tempo que é aplicada.
31
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
2
4
6
8
10
n
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
2
4
6
8
10
n
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1
-0.5
0
0.5
1
n
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-1
-0.5
0
0.5
1
n
[ ] sin( . [ ])y n a x n
Deslocamento na saída duas unidades de tempo
Deslocamento na entrada duas unidades de tempo

Exemplo 1
1
1 1
2 1 0
2 2 1 0
Determinar seo sistema é invariante no tempo
[ ] sin( [ ])
SOLUÇÃO:
Para uma entrada [ ] a saída do sistema é :
[ ] sin( [ ]) (1)
Considerando-se uma entrada [ ] [ ], a saída é :
[ ] sin( [ ]) sin( [ ]) (2)
Para
y n x n
x n
y n x n
x n x n n
y n x n x n n
1
1 1
2 1
um deslocamento da saída [ ]
[ ] sin( [ ]) (3)
Comparando (2) e (3):
[ ] [ ]
Portanto,o sistema é invariante no tiempo
o o
o
y n
y n n x n n
y n y n n
SLIT

Exemplo 2
1
1 1
2 1 0
2 2 1 0
Determinar se osistema é invariante no tempo
[ ] [ ]
SOLUÇÃO:
Para uma entrada [ ] a saída do sistema é :
[ ] [ ] (1)
Considerando-se uma entrada [ ] [ ], a saída é :
[ ] [ ] [ ] (2)
Para um deslocamento da
y n nx n
x n
y n nx n
x n x n n
y n nx n nx n n
1
1 1
2 1
saída [ ]
[ ] ( ) [ ] (3)
Comparando-se (2) e (3) :
[ ] [ ]
Portanto, o sistema é variante no tempo
o o o
o
y n
y n n n n x n n
y n y n n
SLIT

Representação de Sistemas Lineares e
Invariantes • Sistemas em tempo discreto podem ser descritos com
equações em diferença que relacionam a entrada e a saída.
34
1 1[ ] [ 1] [ 2] 4 [ ]
6 6y n y n y n x n

Representação de Sistemas Lineares e
Invariantes
• Para saber se um sistema é linear ou invariante no tempo
discreto, deve-se considerar que:
Os termos que contêm produtos da entrada e/ou saída
trazem como consequência a não linearidade do sistema.
Um termo constante também torna não linear o sistema.
Os coeficientes da entrada ou da saída que são funções
explícitas de n tornam o sistema variante no tempo.
As entradas ou saídas multiplicadas no tempo por um escalar,
por exemplo y[2n], também tornam o sistema variante no
tempo.
35

Representação de Sistemas Lineares e
Invariantes
36
• Uma sequência discreta x[n] pode ser expressa em termos
de uma somatória de impulsos unitários escalados e
deslocados no tempo.

Representação de Sistemas Lineares e
Invariantes
37
x[n]= …+ 7[n+2] + 5[n+1] + 3[n] + 5[n1] +...
x[n]= …+x[2][n+2] + x[1][n+1] + x[0][n] + x[1][n1] +...
[ ] [ ] [ ]k
x n x k n k

• A resposta ao impulso é a resposta de um Sistema Linear a
um impulso localizado no instante k
• Sendo o sistema invariante no tempo:
Representação de Sistemas Lineares e
Invariantes
T { }[n-k] hk[n] knTnhk
38
knhknTnhk

Representação de Sistemas Lineares e
Invariantes
T { }x[n] y[n]
Se a entrada x[n] é uma sequência representada por uma somatória de impulsos
k
knkxnx
k
knkxTny
k
knTkxny
39
k
knhkxny

k k
y n x k h n k h k x n k
Conhecida a resposta ao impulso h[n], é possível calcular a resposta a qualquer sinal de entrada, através da somatória da Convolução.
Somatoria da Convolução
[ ]* [ ]y n x n h n h n x n
40
Representação de Sistemas Lineares e
Invariantes
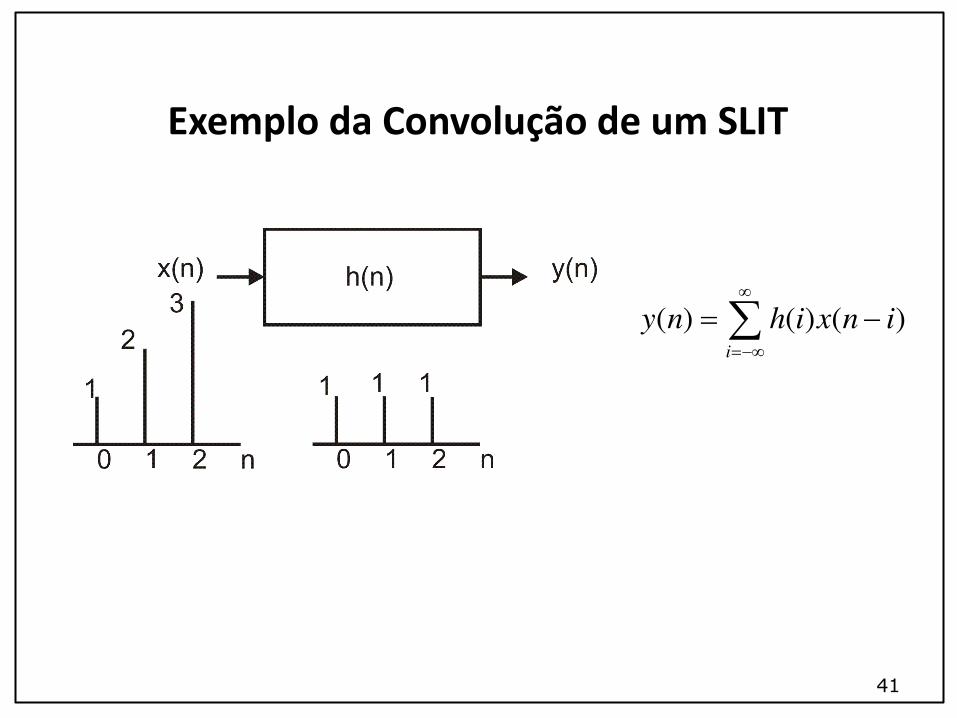
Exemplo da Convolução de um SLIT
41
( ) ( ) ( )i
y n h i x n i

42

43

44

45

46

Resultado da Convolução
47
( ) ( ) ( )i
y n h i x n i
O método da convolução permite encontrar a resposta do sistema a uma entrada arbitraria, conhecendo-se previamente a resposta ao impulso h[n].
















![Sinais de Tempo Discreto 06_07... · 2005-11-23 · Exemplo de descrição de sistema de tempo discreto O resultado será: yk yk xk[] 1.01[ 1] []− −= Transformando a equação](https://img.pdfslide.net/doc/110x75/5f3b6cf6ebc037319710fe70/sinais-de-tempo-0607-2005-11-23-exemplo-de-descrio-de-sistema-de-tempo.jpg)












