Embed Size (px)
Citation preview

ШКОЛА УЧЕНИКА У ПРИВРЕДИ
У БАЊА ЛУЦИ
СМЈЕР: ЕЛЕКТРОТЕХНИКА
ЗАНИМАЊЕ: АУТОЕЛЕКТРИЧАР
ЕЛАБОРАТ
ТЕМА: Систем за регулацију динамике вожње (ЕЅР)
ДАТУМ: Кандидат:
25.04.2011. године Дејан Чавић

САДРЖАЈОПИС И ПРИНЦИП РАДА СИСТЕМА...........................................................................................................3
Регулација жиро момента.....................................................................................................................4
РАЗЛИЧИТА РАДНА СТАЊА СИСТЕМА......................................................................................................5
Нормалан рад........................................................................................................................................5
ABS-регулација.......................................................................................................................................5
ASR-регулација.......................................................................................................................................5
Кочење мотором....................................................................................................................................5
EBV-регулација.......................................................................................................................................5
ESP-регулација.......................................................................................................................................5
УЛАЗНИ И ИЗЛАЗНИ СИГНАЛИ..................................................................................................................6
Сензори броја обртаја...........................................................................................................................6
Сензори угла управљача.......................................................................................................................7
Сензор попречног убрзања...................................................................................................................9
Сензор брзине угла обртаја...................................................................................................................9
Сензори притиска..................................................................................................................................9
Хидраулична јединица........................................................................................................................10
14

ОПИСИПРИНЦИПРАДАСИСТЕМААнтиблокадни систем штити возило од блокирања точкова током кочења,а систем за регулацију проклизавања погона пружа заштиту од проклизавања точкова током убрзавања и успоравања возила.Систем за регулацију динамике вожње побољшава стабилност возила у критичним ситуацијама независно од тога да ли се дјелује на педалу за гас или на кочницу или су обе педале слободне.На основу статистичких података,велики број саобраћајних несрећа посљедица је заношења и слетања возила са пута,поготово по клизавом коловозу.Пре свега,током наглих заокрета,неконтролисане паничне реакције или у кривинама када се превише или недовољно окрене управљач на промјенљивом коловозу,овај систем индивидуалним кочењем појединих точкова и подешавањем рада мотора успјева да стабилизује возило у таквим ситуацијама.Електроника,са својим сензорима,као и код ABS-и и АSR-система,то чини брже и боље од било ког возача.
За разлику од ABS-и ASR система,којима се регулише првенствено уздужна динамика возила,са ESP-системом додатно се регулише стабилност возила у односу на његову вертикалну осу.Овде се ради о регулисању жиро момента који тежи да возило обрне око своје вертикалне осе.На слици 12.21 шематски су приказани елементи ESP-система и мјеста њихове уградње.
14

Напомена.-Зависно од поријекла произвођача,системи за регулацију динамике вожње имају различите називе и скраћенице.Нпр.,DSC-Dinamic Stability Control,ESP-Electronic Stability Program,ASMS-Automatic Stability Management System, FDR-Fahr Dinamik-Regelung,VSC-Vehicle Stability Control,VSA-Vehicle Stability Assist,itd.
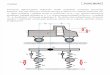
.Регулацијажиромомента На слици 12.22 дата су два једноставна примјера понашања возила са регулацијом и без ESP-регулације.У првом примјеру возач је у кривини превише окренуо управљач,а у другом примјеру премало.
У случају када је возач превише окренуо точак управљача,задњи дио возила се заноси ка спољњој страни а предњи дио ка унутрашњој страни кривине (слика 12.22-а).Као противмјера оваквом понашању возила потребно је,за тренутак, лагано закочити задњи спољњи точак (стрелица блиједе боје)и закочити предњи спољњи точак (стрелица црне боје).Тако настаје изједначујући жиро момент који се супротставља тенденцији скретања и стабилизује возило на правцу кривине.
У случају када је возач недовољно окренуо точак управљача,предњи дио возила наставља право и не прати кривину пута.Овде се као противмјера излетања возила из кривине мора предњи унутрашњи точак лагано закочити (блиједа стрелица) а задњи унутрасњи снажније закочити (црна стрелица).Тако настаје изједначујући жиро момент,који усмјерава возило ка центру кривине и стабилизује га на коловозу.
14

На тај начин ESP-систем,исто као и ABS-и и ASR-системи помажу возачу у критичним ситуацијама,односно спречавају возача да се нађе у тако критичним ситуацијама.У таквим околностима возач примјећује да се ова регулација мимо његове воље одвија само по треперењу упозоравајуће лампице,којом се сигнализира да се возило креће на граници стабилности.Међутим,физичке границе постоје и за овакву регулацију и оне се морају
поштовати.
РАЗЛИЧИТАРАДНАСТАЊАСИСТЕМАНа основу улазних сигнала управљачка јединица препознаје који се поступак мора примјенити за одржање стабилности возила.У принципу тада могу настати следећа радна стања:
Нормалан рад.Није потребна никаква регулација,сви магнетни вентили су искључени и у непобуђеном стању,па је систем спреман за нормално кочење.Овакво је стање и када је регулациони систем у квару.
ABS- .регулацијаОдговарајући магнетни вентили су у хидрауличној јединици система побуђени и спречавају блокирање сваког точка понаособ (јер се ради о 4-каналном систему).
ASR- .регулацијаУкључује се пумпа за високи притисак и напојна пумпа,као и одговарајући магнетни вентил хидрауличне јединице за погонски точак који нагиње проклизавању.
.КочењемоторомУ тој фази,ради се о регулацији кочионог (шлеп) момента мотора повећањем броја обртаја,тј. обртног момента мотора,ако се на погонским точковима региструје тенденцији проклизавања.
EBV- .регулацијаRади се о електронској прерасподјели кочионе силе (EBV).Укључивањем одговарајућих магнетних вентила у хидрауличној јединици ако се на задњим точковима појави проклизавање пре него што се активира ABS-систем.
ESP- .регулацијаУкључује се пумпа за високи притисак и напојна пумпа као и одговарајући магнетни вентили у хидрауличној јединици. Регулацијом кочионог притиска у тачно одређеном тренутку и на тачно одређеном точку,стабилизује се возило,кад год се на основу улазних сигнала препозна критична ситуација којом се угрожава стабилност возила.
14

ESP-Регулација искључења.- Укључивањем одређеног прекидача у случају убрзавања или слободног кретања услед залета,искључују се све набројане регулације изузев система за регулацију кочења EBV и ABS. У том случају упозоравајућа лампица за регулацију стабилности гори стално.
УЛАЗНИИИЗЛАЗНИСИГНАЛИНа слици 12.23 дата је блок шема управљачке јединице ЕЅР-система,заједно са серво-уређајем за појачавање силе кочења (BAS).На слици су приказани сви улазни сигнали и на основу њих резултујући излазни сигнали.А на слици 12.24 дат је конкретан примјер уградње и распореда свих раније набројаних елемената који се повезују са управљачком јединицом.
.Сензори броја обртајаОсновни улазни сигнали за ове системе добијају се од сензора броја обртаја на точковима.Електронска управљачка јединица непрекидно провјерава и међусобно упоређује те сигнале.На основу њих се одређује брзина кретања,убрзање и успорење возила,затим проклиѕавање током кочења (ABS),проклизавање погона (ASR) као и регулација потисног момента мотора (MSR).Податак о брзини возила се преко CAN-BUS-a података преноси и за потребе других система.
14

.Сензори угла управљачаНа основу ових сензора израчунава се угао окретања управљача.Заједно са различитим сигналима предњих точкова у кривини,управљачка јединица одређује промјену правца и то даље обрађује и региструје као жељу возача.Помоћу једног оптичког дигиталног сензора са свјетлећим диодама (LED) и блендама који су распоређени по обиму округле плоче (слика 12.25), могуће је регистровати угао управљача у размацима од по 2,5о .На слици 12.26 шематски су приказани основни дјелови сензора.
14

Овај сензор има кружни прстен за мјерне сигнале са 9 свјетлећих диода (А) и 8 бленди различитих дужина који пролазе кроз канал за свјетлосне препреке (заокружени детаљ на слици).На кружном прстену налазе се два микропроцесора (N49) којима се вреднују свјетло-тамни сигнали са свјетлосних препрека током обртања управљача.Средњи положај управљача препознаје се тачно дефинисаним положајем свјетлећих диода и бленди.
Електрично напајање сензора изводило се преко прикључка 30 са сталном струјом (перманентно напајање).Приликом замјене сензора или посље прекида електричног напајаља,он се мора наново инсталирати.То се изводи обртањем управљача од једног до другог крајњег положаја или краткотрајном вожњом (најмање 50 m) брзином изнад 20 km/h.
Постоје и сензори угла управљача другачије конструкције.Састоје се из два клизна контакта под углом од 90о на кружној потенциомтарској траци и електронске везе којом се обртно кретање управљача претвара у дигиталне сигнале који се преко водова за серијски пренос података (CAN) одводе до управљачке јединице (слика 12.27).
14

Код ових сензора се нулти положај, приликом поправке или замјене сензора,мора утврдити помоћу тестера за дијагнозу.Том приликом точкови возила морају стајати тачно у уздужном правцу возила.
.Сензор попречног убрзањаПринцип рада овог сензора заснива се на промјени капацитивности између детектора и помиче металне масе,што је шематски приказано на слици 12.28.
На основу сигнала овог сензора,управљачка јединица прима информације о насталим попречним силама током вожње у кривини.
.Сензор брзине угла обртајаОсим информација о попречном убрзању,управљачкој јединици су неопходне и информације о угаоној брзини обртања око своје вертикалне осе.На основу тих података одређује се актуелно динамичко стање возила.Ради се заправо о дјеловању жиро момента током закретања возила (слика 12.29).
Сензор угаоне брзине ради на принципу осцилујуће масе која је еластично постављена у једној силицијумској плочици са уграђеном електроником за обраду сигнала (слика 12.30).
Сензори притиска.Притисак у оба кочиона круга контролисе се помоћу сензора притиска у главном кочионом цилиндру.Ови подаци се затим користе за израчунавање кочионе силе и за провјеру сигурности рада система.Осим тога,помоћу овух сигнала,поред сигнала са
14

прекидача за стоп свјетла,систем препознаје почетак процеса кочења.Аутоматски прекида процес ASR-регулације и брзо прелази на регулацију силе кочења у оквиру система за регулацију динамике вожње (ESP).
Сигнал са сензора мембране користи се за израчунавање брзинекојом возач притиска папучицу (педалу) за кочнице.Ако се на основу тог сигнала препозна нужно кочење, серво- појачивач кочионе силе (ВАЅ) укључује један магнетни вентил којим се пројетрава комора до возача и развије максималну кочиону силу.
Током ове регулације укључује се и пумпа високог притиска којом с ствара претпритисак од око 5 бар.Да се,услед тог повећаног притиска не би укључила и стоп свијетла,помоћу посебног релеја се искључује њихов прекидач.Тако,током ЕЅР-регулације стоп свјетла неће свјетлити све док возач не притисне папучицу кочнице.
Подаци о мотору и погону до прављачке јединице долазе помоћу водова за пренос података (CAN).То су информације о предатом обртном моменту мотора и актуелном преносу код аутоматског мјењача, на основу којих се израчунава покретачка сила на погонским точковима.То је веома важно за ASR-регулацију у оквиру свеукупне стабилности возила јер на основу тога управљачка јединица за менаџмент (нпр. MOTRONIC) регулише обртни момент мотора.
.Хидраулична јединица
Поред описаних улазних сигнала, једни од најважнијих излазних сигнала су и сигнали којима се управља радом (побуђују) магнетних вентила у оквиру цјеле хидрауличне јединице.
На сликама 12.31-а, 12.31-б и 12.31-ц приказана су стања хидрауличног кола, током ЕЅР-регулације у три различите фазе: успоравања задржавања и смањења кочионог притиска. За примјер је узет задњи десни точак.
Најприје се затварају преклопни вентили у 24/у25, укључује повратна и пумпа високог притиска m1 и отвара се магнетни вентил у1 у ВАЅ серво-уређају А7/7. Услед тога на усисној страни пумпи високог притиска р1 и р2 формира се претпритисак од око 5 бар. Самоусисна пумпа високог притиска p1, преко отвореног излазног вентила у26, усисава кочиону течност под претпритиском и ствара потребан кочиони притисак за кочиони цилиндар задњег десног точка 6а. Да не би истовремено кочио и предњи лијеви точак 5b (по дијагоналном распореду кочионих кругова), затвара се и његов улазни вентил. За одржавање кочионог притиска затвориће се излазни вентил у26 и улазни вентил за тај точак у12. Тако ће се притисак кочионом цилиндру задржати на достигнутом нивоу и неће мочи више да расте (слике 12.31-а,-b и -c).
14

За смањење притиска отвара ссе излазни вентил у13 па се течност преко пумпе р1 и преклопног вентила враћа назад.
Ако се посље смањења притиска возило стабилисало и није потребна даља регулација, сви магнетни вентили се искључују и враћају у почетно непобуђено стање.Искључује се и пумпа високог притиска па се заостали притисак од око 150 бар смањује преко цјелог система.
14

Најзад морају се поменути и сигнали прекидача за фиксирањекочница,прекидачи за искључење ЕЅР-регулације и контролних лампица. Када је укључен прекидач за фиксирање кочница, искључује се регулација, тзв. шлеп момента током кочења мотором.А ако се искључи прекидач ЕЅР-регулације, регулације шлеп момента искључује се и ASR и ESP-регулација. У том случају, упозоравајуће и контролне лампице на инструмент табли, које су са управљачком јединицом повезане водовима до контролних лампица преносе се и сигнали о истрошености кочионих облога и упозоравајућих лампица за електронске, тракционе (вучне) и АВЅ-системе.
Као и сви до сада описани, и овај систем има уређај за самодијагностику са трајном меморијом за откривене грешке и кварове, који се у сервисима могу ишчитати одговарајућим тест уређајима.
14

14

1. Оцјена практичног рада:____________________________( )
2. Комисија: 1. _______________________________
2. _______________________________
3. _______________________________
3. Питања на усменој одбрани практичног рада:
1. _______________________________
2. _______________________________
3. _______________________________
4. Оцјена усмене одбране практичног рада: ______________( )
5. Закључна оцјена: __________________________________( )
6. Комисија: 1. _______________________________
2. _______________________________
3. _______________________________
Бања Лука:
14