Embed Size (px)
DESCRIPTION
Solution Manual Spanish (Intelligent Autonomous Control) Panos J. Antsaklis and Kevin M. Passino
Citation preview

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 115
CONTROL INTELIGENTE
Nombre Paul Alejandro Frutos
Coacutedigo 22230 Fecha 29082012
DEBER Ndeg 1
EJERCICIO 11
(a) iquestA que nos referimos por Complejidad del Modelo (Model Complexity) y
representacioacuten exacta (accuracy representation) Liste las caracteriacutesticas que afectan
la complejidad de un modelo
La complejidad de un modelo depende de varios aspectos asiacute podemos decir que depende
del sistema fiacutesico que estamos modelando y de que tan bien queremos que este sistema este
representado en el modelo matemaacutetico que lo describe Debemos mencionar que lossistemas dinaacutemicos se modelan a traveacutes de ecuaciones diferenciales y por lo tanto la
complejidad de un modelo se veraacute reflejada en el orden de las ecuaciones asiacute como el
nuacutemero de variables que utilicemos A esto nos referimos por complejidad del modelo
Las caracteriacutesticas que afectan la complejidad de un modelo son la linealidad o no del
modelo matemaacutetico que depende del comportamiento del sistema fiacutesico que estamos
modelando y por lo tanto de las leyes de la fiacutesica que gobiernan al sistema Los modelos
suelen ser maacutes complejos cuando son de orden superior Ademaacutes la complejidad de un
modelo depende de los paraacutemetros de entrada y salida que involucran es decir el nuacutemero de
las variables de entrada y las variables de salida
Cuando hablamos de representacioacuten exacta (accuracy representation) nos referimos a que
tan bueno es nuestro modelo en comparacioacuten con respecto al sistema fiacutesico real es decir
que tan bueno es el modelo para describir el comportamiento real de la planta Lo que se
busca en la teoriacutea de control es tener un modelo preciso y muy aproximado que permita una
representacioacuten adecuada del sistema Se conoce como un ldquomodelo verdaderordquo al un modelo
que es suficiente mente preciso para ser utilizado en la simulacioacuten
(b) Que cuestiones son preocupantes cuando determinamos que tan complejo es el
modelo de una planta que se va a controlar
Cuando se va a disentildear un controlador por lo general es mejor tener modelos maacutes simples
ya que las teacutecnicas de disentildeo de los controladores requieren que el modelo de la planta
satisfaga ciertas condiciones como por ejemplo la linealidad o de lo contrario estos meacutetodos
no podriacutean ser utilizando En varios casos modelos no lineales complejos deben ser
linealizados con el fin de utilizar las teacutecnicas de disentildeo de controladores
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 215
(c) iquestEstaacuten los efectos estocaacutesticos siempre presentes en un sistema Fiacutesico
Explique
Los efectos estocaacutesticos estaacuten presentes siempre los sistemas fiacutesicos de esta menear se
manifiestan como ruido e interferencias las cuales se encuentran en todos los sistemas De
ahiacute que estos efectos pueden modelar a traveacutes de ramdom imputs
(d) iquestPor queacute usamos modelos en tiempo discreto
Utilizamos modelos en tiempo discreto debido a que muchos controladores y procesos de
control estaacuten a cargo de Computadores y en general unidades de procesamiento de datos
(ie Microprocesadores DSPs FPGAs) debido a las ventajas que estos poseen y los cuales
utilizan tecnologiacutea digital la cual requiere manejar modelos discretos para su respectivo
procesamiento
(e)
iquestCuaacuteles son las ventajas y las desventajas de representar un sistema con un
modelo lineal
La ventaja de representar un sistema como un modelo lineal es que podemos utilizar ciertas
teacutecnicas de disentildeo de controladores las cuales requieren necesariamente que el sistema sea
lineal Estos sistemas son apropiados para el uso de teacutecnicas como Frecuency Domain
Technique The Root-Locus Method and Space State method La desventaja estaacute en que la
gran mayoriacutea de los sistemas no son lineales y por lo tanto se requiere linealizar los
sistemas si se quieren utilizar los meacutetodos de disentildeo mencionados lo cual no siempre es
posible y con lo cual tambieacuten se pierde cierta informacioacuten en el modelado del sistema El
modelo no lineal se lo conoce como modelo verdadero
(f) iquestEs un modelo lineal de un sistema fiacutesico perfectamente exacto iquestY un modelo
no lineal Explique
Un modelo lineal de un sistema fiacutesico no es perfectamente exacto de hecho los sistemas
fiacutesicos se acercan maacutes a los modelos no lineales como ya se menciono pero no esto implica
que los modelos no liacuteneas sean a su vez modelos perfectamente exactos Se debe entenderque no se puede tener un modelo matemaacutetico perfecto para un sistema Por ello se dice que
el modelo lineal es el ldquoVerdadero Modelordquo ya que es el maacutes cercano en representar la
realidad del sistema y el modelo lineal derivado de este como el modelo para el disentildeo del
controlador
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 315
EJERCICIO 12
a) Defina los siguientes
- Estabilidad BIBO (BIBO
es BIBO estable sie
acotada corresponda una sali
- Estabilidad de Lyapunov (St
pueden ser discutidos para la
dinaacutemicos El tipo maacutes impor
punto de Equilibrio En teacuter
sistema que comienzan cerc
entonces es estable en el se
- Estabilidad Asintoacutetica (Asy
y todas las soluciones que
asintoacuteticamente estable
- Controlabilidad (Controll
control la cual tiene un rol
estabilizacioacuten de sistemas ine
Un sistema es completamenteuna entrada externa puede caotro estado final en un interva
Para un sistema lineal e invari
Donde es vector de estado matriz de estados
trasmisioacuten directa
Matriz de controlabilidad
Si la matriz de controlabilida
- Observabilidad (Observabil
internos de un sistema pue
conceptos
tability)- En teoriacutea de control un sistema
mpre que para cualquier entrada que e
a acotada
ability in the sense of Lyapunov)- Varios tipos
solucioacuten de ecuaciones diferenciales que desc
tante es el concierne la estabilidad de solucion
inos simples se puede decir que si todas las
de un punto de equilibrio y permanecen
ntido de Lyapunov
ptotic Stability) - Si es estable en el sentid
empiezan cerca de convergen a e
bility)- Es una caracteriacutestica relevante de
crucial en los problemas de control como p
tables o el control optimo [3]
controlable (Complete state controllability) q biar el estado interno de un sistema desde unlo de tiempo finito
ante en el tiempo LTI
vector de salida vector de entrada (o de c matriz de entrada matriz de salida
posee un rango maacuteximo el sistema es controla
ity)- En teoriacutea de control es una medida de coacute
en ser inferidos a traveacutes del conocimiento
efinido como
s una funcioacuten
de estabilidad
riben sistemas
es cerca de un
soluciones del
cerca de
de Lyapunov
tonces es
n sistema de
or ejemplo la
iere decir questado inicial a
ontrol) la matriz de
ble
o los estados
de las salidas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 415
externas Un sistema es obser
comportamiento de todo el si
algunos de sus estados no
desconocido para el controlad
En un sistema lineal e invaria
Donde es vector de estado matriz de estados
trasmisioacuten directa
Matriz de Observabilidad
Se dice que un sistema es o
determinante sea distinto de c
- Rise time- Se refiere al
especiacutefico bajo a un valor
valores son el 10 y el 90como el tiempo requerido pa
valor final
- Overshoot- Es la magnitud
en el estado estable en un tip
- Steady State Error- Se defi
actual una vez que el sistema
(b) Dar ejemplos de las pro
- Control de navegacioacuten (Cr
- Estabilidad BIBO (BIBO
necesariamente de una estabi
referencia esta acotada (ie 0
Cuando hablamos de estabil
liacutemites funcionando correcta
able conociendo las salidas de un sistema es p
tema Si un sistema no es observable los valo
ueden ser determinados lo cual significa q
or
te en el tiempo LTI
vector de salida vector de entrada (o de matriz de entrada matriz de salida
bservable siempre que la matriz tenga un ra
ro [4]
iempo requerido para que una sentildeal cambi
especiacutefico alto Tiacutepicamente en electroacutenica
del valor final En teoriacutea de control rise tia que la respuesta se incremente desde el 10
por la cual una sentildeal o funcioacuten de salida exced
dado
ne como la diferencia entre el valor deseado
lcanza el estado estable
iedades en (a) para los siguientes sistemas
ise control)
Stability)- En el control de la navegac
idad BIBO debido a que la entrada que es la
a 200 Kmh) y la salida estaraacute acotada en ese
dad decimos en que el sistema debe mante
ente y no debe tomar valores que sobrepasen
osible saber el
es actuales de
e su valor es
ontrol) la matriz de
go sea n y el
de un valor
anaacuteloga estos
e es definidoal 90 de su
al valor final
nal y el valor
ioacuten se habla
elocidades de
mismo rango
erse en estos
los liacutemites de
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 515
la estabilidad lo que se traduce en que los actuadores (ie motores) deben funcionar seguacuten
la capacidad que indica su fabricante no pueden ir maacutes allaacute de sus capacidades asiacute por
ejemplo un motor que no puede girar maacutes raacutepido que su velocidad sincroacutenica
- Stability in the sense of Lyapunov - Cuando el vehiacuteculo se encuentra en una velocidad
determinada y activamos el control de velocidad y lo fijamos en una velocidad cercana a lavelocidad que tenemos y el sistema permanecen cerca de la velocidad de referencia
notamos que el sistema de navegacioacuten es estable en el sentido de Lyapunov
-Asymptotic Stability- Cuando a partir de una velocidad inicial se llega exactamente
velocidad deseada y el vehiacuteculo mantiene la velocidad misma durante toda su trayectoria
decimos que es asintoacuteticamente estable Este comportamiento no es posible en el control de
la navegacioacuten ya que la velocidad variara muy poco alrededor de un valor pero no se
establece exactamente en un valor determinado
983085 Controlabilidad (Controllability)- En el control de navegacioacuten la controlabilidad significa
que tan bien se estabiliza la velocidad cuando el sistema se vuelve inestable debido a un
cambio suacutebito en la velocidad (ie frenado)
- Observabilidad (Observability)- El sistema puede ser o no observable dependiendo del
modelo empleado para conocer los estados internos del sistema debemos conocer las
variables de la salida de la navegacioacuten que en este caso es la velocidad la cual la podemos
medir con un sensor de velocidad como por ejemplo un tacogenerador encoder o alguacuten
otro dispositivo dependiendo el tipo de motor en el vehiacuteculo
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la
velocidad actual se acerque a la velocidad deseada cuando se hace un cambio tipo escaloacuten
en la referencia de velocidad
- Overshoot- Es el pico del valor de la velocidad a la que se llega cuando se aplica un
cambio de tipo escaloacuten en la referencia de la velocidad del sistema o tambieacuten en la entrada
del sistema la cual puede ser el acelerador del vehiacuteculo
- Steady State Error- Es la diferencia entre la velocidad deseada o de referencia y la
velocidad que alcanza el vehiacuteculo
- Control de Altura de un Avioacuten (Aircraft altitude control)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada Y la
salida tambieacuten seraacute acotada ya que las turbinas del avioacuten solo podraacuten funcionar seguacuten la
capacidad provista por el fabricante
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 615
- Stability in the sense of Lyapunov - Cuando el avioacuten se encuentra en altura determinada y
activamos el control de altitud y se lo fija en una altitud cercana a la altura que tenemos y
el avioacuten permanecen cerca de aquella de referencia entonces notamos que el sistema es
estable en el sentido de Lyapunov
- Asymptotic Stability- Cuando a partir de una altitud en la se encuentra volando el avioacuten
se llega exactamente a la altura deseada y el avioacuten mantiene la misma altura durante toda
su trayectoria decimos que es asintoacuteticamente estable Este tipo de comportamiento no es
posible en este sentido para este tipo de sistema
983085 Controlabilidad (Controllability)- Podemos decir que se refiere a que tan bien se puede
retomar el control de la altura del avioacuten cuando el sistema se vuelve inestable
- Observabilidad (Observability)- Se usan sensores de GPS altiacutemetros etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la altitud
actual se acerque a la altura deseada cuando se hace un cambio tipo escaloacuten en la referencia
de velocidad
- Overshoot- Podriacuteamos referirnos desde un punto de vista del funcionamiento de los
motores al pico maacuteximo de velocidad a la que llegan las turbinas del avioacuten cuando se
realiza un cambio en la altura de referencia del sistema
- Steady State Error- Diferencia entre la altura deseada o de referencia y la altura a la que
vuela el avioacuten
- Control de Temperatura (Temperature Control in a house)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada
Sentildeal de salida acotada hacia los actuadores
- Stability in the sense of Lyapunov ndash La temperatura de la casa se mantiene alrededor de
una temperatura establecida
983085 Controlabilidad (Controllability)- Se refiere a la capacidad de controlar un sistema de
temperatura inestable
- Observabilidad (Observability)- Se usan sensores de coacutemo termocuplas PT100 etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para los actuadores
que sirven para enfriar o calentar un ambiente se enciendan un cambio tipo escaloacuten en la
referencia de temperatura
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 715
- Overshoot- Potencia maacutexima instantaacutenea a la que llega el actuador que sirve para enfriar
o calentar un ambiente cuando se presenta un cambio en la variacioacuten del sistema
- Steady State Error- Es la diferencia entre la temperatura deseada o de referencia y la
temperatura se que alcanza dentro de la casa
(c) Explicar que es ldquoDisturbance Rejectionrdquo y sensibilidad a la variacioacuten de
paraacutemetros de la planta e identifique las perturbaciones y las variaciones en los
paraacutemetros de la planta de cada uno de los sistemas en (b) (Para esto se deberiacutea
describir el proceso dibujar el sistema de control para el proceso mostrar donde las
perturbaciones entran en el sistema y describir sus efectos en el lazo cerrado)
Disturbance Rejection - Todos los sistemas fiacutesicos tienen que lidiar con cierta cantidad de
ruido y perturbaciones La habilidad de un sistema para ignorar el ruido es conocida como
rechazo a la perturbacioacuten (Disturbance Rejection) de un sistema
Sensibilidad a la variacioacuten de Paraacutemetros (Sensitivity) - Se refiere a como se afecta nuestrosistema cuando realizamos alguacuten cambio en los paraacutemetro internos que caracterizan al
sistema Todo sistema que alguna vez se tratar de controlar tendraacute cambios Si se disentildea para alguacuten caso nominal y no dar cuenta de la variabilidad del sistema se puede tener un
sistema que es inestable por alguna situacioacuten
Control de Navegacioacuten (Cruise Control)
El propoacutesito del control de navegacioacuten es mantener la velocidad del vehiacuteculo constante Lamayor perturbacioacuten de este sistema es debido a los cambios en la pendiente del camino la
cual genera fuerzas en el vehiacuteculo debido a la gravedad En este sistema tambieacuten podemos
encontrar perturbaciones como son las fuerzas debidas al aire y la resistencia al rodamiento
Figura 1- Perturbacion Fuerzas Generadas debido a la pendiente del camino depende del
aacutengulo de inclinacioacuten)
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 815
Figura 2- Diagrama de blo
Fuerzas Gen
En cuanto a los paraacutemetros
pasajeros en el vehiacuteculo y el plos paraacutemetros pueden ser t
reemplazados debido a fallas
- Control de Altura de un A
Perturbaciones Algunas de la
del viento la turbulencia que
vibracioacuten al interior de una ae
(conflicto traacutefico aeacutereo y aves
Figura 3- Diag
Paraacutemetros En el motor de
dinaacutemica de vuelo como se cde cambio de velocidad (tan
afectan el movimiento del av
vaciacuteo en otras tambieacuten debe puede cambiar
Temperature Control in a
El problema con el control d
corrientes de aire o caliente qmencionar que el secador de
ues del control de navegacioacuten de un vehiacuteculo (
eradas debido a la pendiente del camino) [5]
e la planta que deben ser considerados estaacuten
eso de los mismos el combustible que se utilizdos los sistemas mecaacutenicos o hidraacuteulicos q
mantenimiento como son el motor pastillas d
ioacuten (Aircraft altitude control)
perturbaciones que tenemos en este sistema so
es una alteracioacuten en el flujo continuo del aire l
ronave) el Estado del clima (lluvioso seco etc
[4]
rama de bloques del control de Altura Avioacuten [6
un avioacuten motor tendremos desgastes En un a
nsume el combustible (peso de la aeronave etco de cambiar la forma en la que las superfic
oacuten) Un avioacuten puede estar lleno en algunas o
mos considerar que la constante de tiempo teacute
ouse
temperatura es la presencia de perturbaciones
ue llegan al sensor de temperatura asiacute por ejel cabello podriacutea causar una perturbacioacuten ya
erturbacioacuten
el nuacutemero de
a y en generale pueden ser
frenos etc
la velocidad
que provoca
las Aves
]
ioacuten cambia la
) La altitud yies de control
asiones y casi
rmica la cual
como son las
plo podemosue emite aire
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 915
caliente en el interior de un cuarto esta corriente de aire podriacutea llegar al sensor de la
temperatura causando asiacute una perturbacioacuten Otras de las perturbaciones maacutes comunes en el
control de la temperatura de una casa podriacutean ser las corrientes de aire frio o caliente quellegan desde el exterior Otra posible perturbacioacuten seria el vapor generado en la cocina de
ahiacute que el sensor de temperatura en este tipo de sistema debe estar en lugar donde se eviten
este tipo de perturbaciones
Figura 4- Diagrama de bloques del control de temperatura en una casa [7]
En cuanto a los paraacutemetros de la planta que deben ser considerados y que podriacutean variar el
comportamiento del sistema son los motores (enfriar) o calefactores las estaciones del antildeo
Si hablamos de un mismo sistema para el control de la temperatura usado en varios lugares podriacuteamos considerar una variacioacuten en los paraacutemetros (mismo sistema pero diferentes
paraacutemetros estaacuteticos) y de esta manera verificar un comportamiento del sistema en cada
lugar especiacutefico asiacute se puede apreciar el comportamiento del sistema seguacuten el tipo deconstruccioacuten hormigoacuten madera acero y los materiales teacutermicos utilizados para su
recubrimiento
EJERCICIO 13 (Fuzzy Control Desing Philosophy) Estos problemas se enfocaran en
el disentildeo de sistemas control Fuzzy
(a) iquestSe utiliza un modelo para el disentildeo de un sistema de control Fuzzy iquestCuaacutendo se
utiliza y queacute tipo de modelo es iquestDeberiacutea usarse un modelo iquestPor queacute iquestPor queacute no
Existen varias aplicaciones en las que no se necesita un modelo para implementar
directamente un controlador Fuzzy En esa situacioacuten no se necesita de un modelo formal
del proceso sin embargo estas aplicaciones no necesitan realmente de un controlador
debido a su estructura tan baacutesica Los modelos en siacute nos ayudan a entender el
comportamiento del sistema simular y por lo tanto a probar el controlador disentildeado De ahiacute
que es bueno el hecho de utilizar un modelo matemaacutetico en el disentildeo de un controlador
Fuzzy por lo tanto siempre es necesario un modelo si se quieren hacer bien las cosas
especialmente no se puede dejar de utilizar un modelo si se manejan aplicaciones criticas de
seguridad ya que no se podriacutean realizar la simulacioacuten y la evaluacioacuten del comportamiento
de dichos sistemas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 215
(c) iquestEstaacuten los efectos estocaacutesticos siempre presentes en un sistema Fiacutesico
Explique
Los efectos estocaacutesticos estaacuten presentes siempre los sistemas fiacutesicos de esta menear se
manifiestan como ruido e interferencias las cuales se encuentran en todos los sistemas De
ahiacute que estos efectos pueden modelar a traveacutes de ramdom imputs
(d) iquestPor queacute usamos modelos en tiempo discreto
Utilizamos modelos en tiempo discreto debido a que muchos controladores y procesos de
control estaacuten a cargo de Computadores y en general unidades de procesamiento de datos
(ie Microprocesadores DSPs FPGAs) debido a las ventajas que estos poseen y los cuales
utilizan tecnologiacutea digital la cual requiere manejar modelos discretos para su respectivo
procesamiento
(e)
iquestCuaacuteles son las ventajas y las desventajas de representar un sistema con un
modelo lineal
La ventaja de representar un sistema como un modelo lineal es que podemos utilizar ciertas
teacutecnicas de disentildeo de controladores las cuales requieren necesariamente que el sistema sea
lineal Estos sistemas son apropiados para el uso de teacutecnicas como Frecuency Domain
Technique The Root-Locus Method and Space State method La desventaja estaacute en que la
gran mayoriacutea de los sistemas no son lineales y por lo tanto se requiere linealizar los
sistemas si se quieren utilizar los meacutetodos de disentildeo mencionados lo cual no siempre es
posible y con lo cual tambieacuten se pierde cierta informacioacuten en el modelado del sistema El
modelo no lineal se lo conoce como modelo verdadero
(f) iquestEs un modelo lineal de un sistema fiacutesico perfectamente exacto iquestY un modelo
no lineal Explique
Un modelo lineal de un sistema fiacutesico no es perfectamente exacto de hecho los sistemas
fiacutesicos se acercan maacutes a los modelos no lineales como ya se menciono pero no esto implica
que los modelos no liacuteneas sean a su vez modelos perfectamente exactos Se debe entenderque no se puede tener un modelo matemaacutetico perfecto para un sistema Por ello se dice que
el modelo lineal es el ldquoVerdadero Modelordquo ya que es el maacutes cercano en representar la
realidad del sistema y el modelo lineal derivado de este como el modelo para el disentildeo del
controlador
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 315
EJERCICIO 12
a) Defina los siguientes
- Estabilidad BIBO (BIBO
es BIBO estable sie
acotada corresponda una sali
- Estabilidad de Lyapunov (St
pueden ser discutidos para la
dinaacutemicos El tipo maacutes impor
punto de Equilibrio En teacuter
sistema que comienzan cerc
entonces es estable en el se
- Estabilidad Asintoacutetica (Asy
y todas las soluciones que
asintoacuteticamente estable
- Controlabilidad (Controll
control la cual tiene un rol
estabilizacioacuten de sistemas ine
Un sistema es completamenteuna entrada externa puede caotro estado final en un interva
Para un sistema lineal e invari
Donde es vector de estado matriz de estados
trasmisioacuten directa
Matriz de controlabilidad
Si la matriz de controlabilida
- Observabilidad (Observabil
internos de un sistema pue
conceptos
tability)- En teoriacutea de control un sistema
mpre que para cualquier entrada que e
a acotada
ability in the sense of Lyapunov)- Varios tipos
solucioacuten de ecuaciones diferenciales que desc
tante es el concierne la estabilidad de solucion
inos simples se puede decir que si todas las
de un punto de equilibrio y permanecen
ntido de Lyapunov
ptotic Stability) - Si es estable en el sentid
empiezan cerca de convergen a e
bility)- Es una caracteriacutestica relevante de
crucial en los problemas de control como p
tables o el control optimo [3]
controlable (Complete state controllability) q biar el estado interno de un sistema desde unlo de tiempo finito
ante en el tiempo LTI
vector de salida vector de entrada (o de c matriz de entrada matriz de salida
posee un rango maacuteximo el sistema es controla
ity)- En teoriacutea de control es una medida de coacute
en ser inferidos a traveacutes del conocimiento
efinido como
s una funcioacuten
de estabilidad
riben sistemas
es cerca de un
soluciones del
cerca de
de Lyapunov
tonces es
n sistema de
or ejemplo la
iere decir questado inicial a
ontrol) la matriz de
ble
o los estados
de las salidas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 415
externas Un sistema es obser
comportamiento de todo el si
algunos de sus estados no
desconocido para el controlad
En un sistema lineal e invaria
Donde es vector de estado matriz de estados
trasmisioacuten directa
Matriz de Observabilidad
Se dice que un sistema es o
determinante sea distinto de c
- Rise time- Se refiere al
especiacutefico bajo a un valor
valores son el 10 y el 90como el tiempo requerido pa
valor final
- Overshoot- Es la magnitud
en el estado estable en un tip
- Steady State Error- Se defi
actual una vez que el sistema
(b) Dar ejemplos de las pro
- Control de navegacioacuten (Cr
- Estabilidad BIBO (BIBO
necesariamente de una estabi
referencia esta acotada (ie 0
Cuando hablamos de estabil
liacutemites funcionando correcta
able conociendo las salidas de un sistema es p
tema Si un sistema no es observable los valo
ueden ser determinados lo cual significa q
or
te en el tiempo LTI
vector de salida vector de entrada (o de matriz de entrada matriz de salida
bservable siempre que la matriz tenga un ra
ro [4]
iempo requerido para que una sentildeal cambi
especiacutefico alto Tiacutepicamente en electroacutenica
del valor final En teoriacutea de control rise tia que la respuesta se incremente desde el 10
por la cual una sentildeal o funcioacuten de salida exced
dado
ne como la diferencia entre el valor deseado
lcanza el estado estable
iedades en (a) para los siguientes sistemas
ise control)
Stability)- En el control de la navegac
idad BIBO debido a que la entrada que es la
a 200 Kmh) y la salida estaraacute acotada en ese
dad decimos en que el sistema debe mante
ente y no debe tomar valores que sobrepasen
osible saber el
es actuales de
e su valor es
ontrol) la matriz de
go sea n y el
de un valor
anaacuteloga estos
e es definidoal 90 de su
al valor final
nal y el valor
ioacuten se habla
elocidades de
mismo rango
erse en estos
los liacutemites de
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 515
la estabilidad lo que se traduce en que los actuadores (ie motores) deben funcionar seguacuten
la capacidad que indica su fabricante no pueden ir maacutes allaacute de sus capacidades asiacute por
ejemplo un motor que no puede girar maacutes raacutepido que su velocidad sincroacutenica
- Stability in the sense of Lyapunov - Cuando el vehiacuteculo se encuentra en una velocidad
determinada y activamos el control de velocidad y lo fijamos en una velocidad cercana a lavelocidad que tenemos y el sistema permanecen cerca de la velocidad de referencia
notamos que el sistema de navegacioacuten es estable en el sentido de Lyapunov
-Asymptotic Stability- Cuando a partir de una velocidad inicial se llega exactamente
velocidad deseada y el vehiacuteculo mantiene la velocidad misma durante toda su trayectoria
decimos que es asintoacuteticamente estable Este comportamiento no es posible en el control de
la navegacioacuten ya que la velocidad variara muy poco alrededor de un valor pero no se
establece exactamente en un valor determinado
983085 Controlabilidad (Controllability)- En el control de navegacioacuten la controlabilidad significa
que tan bien se estabiliza la velocidad cuando el sistema se vuelve inestable debido a un
cambio suacutebito en la velocidad (ie frenado)
- Observabilidad (Observability)- El sistema puede ser o no observable dependiendo del
modelo empleado para conocer los estados internos del sistema debemos conocer las
variables de la salida de la navegacioacuten que en este caso es la velocidad la cual la podemos
medir con un sensor de velocidad como por ejemplo un tacogenerador encoder o alguacuten
otro dispositivo dependiendo el tipo de motor en el vehiacuteculo
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la
velocidad actual se acerque a la velocidad deseada cuando se hace un cambio tipo escaloacuten
en la referencia de velocidad
- Overshoot- Es el pico del valor de la velocidad a la que se llega cuando se aplica un
cambio de tipo escaloacuten en la referencia de la velocidad del sistema o tambieacuten en la entrada
del sistema la cual puede ser el acelerador del vehiacuteculo
- Steady State Error- Es la diferencia entre la velocidad deseada o de referencia y la
velocidad que alcanza el vehiacuteculo
- Control de Altura de un Avioacuten (Aircraft altitude control)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada Y la
salida tambieacuten seraacute acotada ya que las turbinas del avioacuten solo podraacuten funcionar seguacuten la
capacidad provista por el fabricante
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 615
- Stability in the sense of Lyapunov - Cuando el avioacuten se encuentra en altura determinada y
activamos el control de altitud y se lo fija en una altitud cercana a la altura que tenemos y
el avioacuten permanecen cerca de aquella de referencia entonces notamos que el sistema es
estable en el sentido de Lyapunov
- Asymptotic Stability- Cuando a partir de una altitud en la se encuentra volando el avioacuten
se llega exactamente a la altura deseada y el avioacuten mantiene la misma altura durante toda
su trayectoria decimos que es asintoacuteticamente estable Este tipo de comportamiento no es
posible en este sentido para este tipo de sistema
983085 Controlabilidad (Controllability)- Podemos decir que se refiere a que tan bien se puede
retomar el control de la altura del avioacuten cuando el sistema se vuelve inestable
- Observabilidad (Observability)- Se usan sensores de GPS altiacutemetros etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la altitud
actual se acerque a la altura deseada cuando se hace un cambio tipo escaloacuten en la referencia
de velocidad
- Overshoot- Podriacuteamos referirnos desde un punto de vista del funcionamiento de los
motores al pico maacuteximo de velocidad a la que llegan las turbinas del avioacuten cuando se
realiza un cambio en la altura de referencia del sistema
- Steady State Error- Diferencia entre la altura deseada o de referencia y la altura a la que
vuela el avioacuten
- Control de Temperatura (Temperature Control in a house)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada
Sentildeal de salida acotada hacia los actuadores
- Stability in the sense of Lyapunov ndash La temperatura de la casa se mantiene alrededor de
una temperatura establecida
983085 Controlabilidad (Controllability)- Se refiere a la capacidad de controlar un sistema de
temperatura inestable
- Observabilidad (Observability)- Se usan sensores de coacutemo termocuplas PT100 etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para los actuadores
que sirven para enfriar o calentar un ambiente se enciendan un cambio tipo escaloacuten en la
referencia de temperatura
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 715
- Overshoot- Potencia maacutexima instantaacutenea a la que llega el actuador que sirve para enfriar
o calentar un ambiente cuando se presenta un cambio en la variacioacuten del sistema
- Steady State Error- Es la diferencia entre la temperatura deseada o de referencia y la
temperatura se que alcanza dentro de la casa
(c) Explicar que es ldquoDisturbance Rejectionrdquo y sensibilidad a la variacioacuten de
paraacutemetros de la planta e identifique las perturbaciones y las variaciones en los
paraacutemetros de la planta de cada uno de los sistemas en (b) (Para esto se deberiacutea
describir el proceso dibujar el sistema de control para el proceso mostrar donde las
perturbaciones entran en el sistema y describir sus efectos en el lazo cerrado)
Disturbance Rejection - Todos los sistemas fiacutesicos tienen que lidiar con cierta cantidad de
ruido y perturbaciones La habilidad de un sistema para ignorar el ruido es conocida como
rechazo a la perturbacioacuten (Disturbance Rejection) de un sistema
Sensibilidad a la variacioacuten de Paraacutemetros (Sensitivity) - Se refiere a como se afecta nuestrosistema cuando realizamos alguacuten cambio en los paraacutemetro internos que caracterizan al
sistema Todo sistema que alguna vez se tratar de controlar tendraacute cambios Si se disentildea para alguacuten caso nominal y no dar cuenta de la variabilidad del sistema se puede tener un
sistema que es inestable por alguna situacioacuten
Control de Navegacioacuten (Cruise Control)
El propoacutesito del control de navegacioacuten es mantener la velocidad del vehiacuteculo constante Lamayor perturbacioacuten de este sistema es debido a los cambios en la pendiente del camino la
cual genera fuerzas en el vehiacuteculo debido a la gravedad En este sistema tambieacuten podemos
encontrar perturbaciones como son las fuerzas debidas al aire y la resistencia al rodamiento
Figura 1- Perturbacion Fuerzas Generadas debido a la pendiente del camino depende del
aacutengulo de inclinacioacuten)
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 815
Figura 2- Diagrama de blo
Fuerzas Gen
En cuanto a los paraacutemetros
pasajeros en el vehiacuteculo y el plos paraacutemetros pueden ser t
reemplazados debido a fallas
- Control de Altura de un A
Perturbaciones Algunas de la
del viento la turbulencia que
vibracioacuten al interior de una ae
(conflicto traacutefico aeacutereo y aves
Figura 3- Diag
Paraacutemetros En el motor de
dinaacutemica de vuelo como se cde cambio de velocidad (tan
afectan el movimiento del av
vaciacuteo en otras tambieacuten debe puede cambiar
Temperature Control in a
El problema con el control d
corrientes de aire o caliente qmencionar que el secador de
ues del control de navegacioacuten de un vehiacuteculo (
eradas debido a la pendiente del camino) [5]
e la planta que deben ser considerados estaacuten
eso de los mismos el combustible que se utilizdos los sistemas mecaacutenicos o hidraacuteulicos q
mantenimiento como son el motor pastillas d
ioacuten (Aircraft altitude control)
perturbaciones que tenemos en este sistema so
es una alteracioacuten en el flujo continuo del aire l
ronave) el Estado del clima (lluvioso seco etc
[4]
rama de bloques del control de Altura Avioacuten [6
un avioacuten motor tendremos desgastes En un a
nsume el combustible (peso de la aeronave etco de cambiar la forma en la que las superfic
oacuten) Un avioacuten puede estar lleno en algunas o
mos considerar que la constante de tiempo teacute
ouse
temperatura es la presencia de perturbaciones
ue llegan al sensor de temperatura asiacute por ejel cabello podriacutea causar una perturbacioacuten ya
erturbacioacuten
el nuacutemero de
a y en generale pueden ser
frenos etc
la velocidad
que provoca
las Aves
]
ioacuten cambia la
) La altitud yies de control
asiones y casi
rmica la cual
como son las
plo podemosue emite aire
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 915
caliente en el interior de un cuarto esta corriente de aire podriacutea llegar al sensor de la
temperatura causando asiacute una perturbacioacuten Otras de las perturbaciones maacutes comunes en el
control de la temperatura de una casa podriacutean ser las corrientes de aire frio o caliente quellegan desde el exterior Otra posible perturbacioacuten seria el vapor generado en la cocina de
ahiacute que el sensor de temperatura en este tipo de sistema debe estar en lugar donde se eviten
este tipo de perturbaciones
Figura 4- Diagrama de bloques del control de temperatura en una casa [7]
En cuanto a los paraacutemetros de la planta que deben ser considerados y que podriacutean variar el
comportamiento del sistema son los motores (enfriar) o calefactores las estaciones del antildeo
Si hablamos de un mismo sistema para el control de la temperatura usado en varios lugares podriacuteamos considerar una variacioacuten en los paraacutemetros (mismo sistema pero diferentes
paraacutemetros estaacuteticos) y de esta manera verificar un comportamiento del sistema en cada
lugar especiacutefico asiacute se puede apreciar el comportamiento del sistema seguacuten el tipo deconstruccioacuten hormigoacuten madera acero y los materiales teacutermicos utilizados para su
recubrimiento
EJERCICIO 13 (Fuzzy Control Desing Philosophy) Estos problemas se enfocaran en
el disentildeo de sistemas control Fuzzy
(a) iquestSe utiliza un modelo para el disentildeo de un sistema de control Fuzzy iquestCuaacutendo se
utiliza y queacute tipo de modelo es iquestDeberiacutea usarse un modelo iquestPor queacute iquestPor queacute no
Existen varias aplicaciones en las que no se necesita un modelo para implementar
directamente un controlador Fuzzy En esa situacioacuten no se necesita de un modelo formal
del proceso sin embargo estas aplicaciones no necesitan realmente de un controlador
debido a su estructura tan baacutesica Los modelos en siacute nos ayudan a entender el
comportamiento del sistema simular y por lo tanto a probar el controlador disentildeado De ahiacute
que es bueno el hecho de utilizar un modelo matemaacutetico en el disentildeo de un controlador
Fuzzy por lo tanto siempre es necesario un modelo si se quieren hacer bien las cosas
especialmente no se puede dejar de utilizar un modelo si se manejan aplicaciones criticas de
seguridad ya que no se podriacutean realizar la simulacioacuten y la evaluacioacuten del comportamiento
de dichos sistemas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 315
EJERCICIO 12
a) Defina los siguientes
- Estabilidad BIBO (BIBO
es BIBO estable sie
acotada corresponda una sali
- Estabilidad de Lyapunov (St
pueden ser discutidos para la
dinaacutemicos El tipo maacutes impor
punto de Equilibrio En teacuter
sistema que comienzan cerc
entonces es estable en el se
- Estabilidad Asintoacutetica (Asy
y todas las soluciones que
asintoacuteticamente estable
- Controlabilidad (Controll
control la cual tiene un rol
estabilizacioacuten de sistemas ine
Un sistema es completamenteuna entrada externa puede caotro estado final en un interva
Para un sistema lineal e invari
Donde es vector de estado matriz de estados
trasmisioacuten directa
Matriz de controlabilidad
Si la matriz de controlabilida
- Observabilidad (Observabil
internos de un sistema pue
conceptos
tability)- En teoriacutea de control un sistema
mpre que para cualquier entrada que e
a acotada
ability in the sense of Lyapunov)- Varios tipos
solucioacuten de ecuaciones diferenciales que desc
tante es el concierne la estabilidad de solucion
inos simples se puede decir que si todas las
de un punto de equilibrio y permanecen
ntido de Lyapunov
ptotic Stability) - Si es estable en el sentid
empiezan cerca de convergen a e
bility)- Es una caracteriacutestica relevante de
crucial en los problemas de control como p
tables o el control optimo [3]
controlable (Complete state controllability) q biar el estado interno de un sistema desde unlo de tiempo finito
ante en el tiempo LTI
vector de salida vector de entrada (o de c matriz de entrada matriz de salida
posee un rango maacuteximo el sistema es controla
ity)- En teoriacutea de control es una medida de coacute
en ser inferidos a traveacutes del conocimiento
efinido como
s una funcioacuten
de estabilidad
riben sistemas
es cerca de un
soluciones del
cerca de
de Lyapunov
tonces es
n sistema de
or ejemplo la
iere decir questado inicial a
ontrol) la matriz de
ble
o los estados
de las salidas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 415
externas Un sistema es obser
comportamiento de todo el si
algunos de sus estados no
desconocido para el controlad
En un sistema lineal e invaria
Donde es vector de estado matriz de estados
trasmisioacuten directa
Matriz de Observabilidad
Se dice que un sistema es o
determinante sea distinto de c
- Rise time- Se refiere al
especiacutefico bajo a un valor
valores son el 10 y el 90como el tiempo requerido pa
valor final
- Overshoot- Es la magnitud
en el estado estable en un tip
- Steady State Error- Se defi
actual una vez que el sistema
(b) Dar ejemplos de las pro
- Control de navegacioacuten (Cr
- Estabilidad BIBO (BIBO
necesariamente de una estabi
referencia esta acotada (ie 0
Cuando hablamos de estabil
liacutemites funcionando correcta
able conociendo las salidas de un sistema es p
tema Si un sistema no es observable los valo
ueden ser determinados lo cual significa q
or
te en el tiempo LTI
vector de salida vector de entrada (o de matriz de entrada matriz de salida
bservable siempre que la matriz tenga un ra
ro [4]
iempo requerido para que una sentildeal cambi
especiacutefico alto Tiacutepicamente en electroacutenica
del valor final En teoriacutea de control rise tia que la respuesta se incremente desde el 10
por la cual una sentildeal o funcioacuten de salida exced
dado
ne como la diferencia entre el valor deseado
lcanza el estado estable
iedades en (a) para los siguientes sistemas
ise control)
Stability)- En el control de la navegac
idad BIBO debido a que la entrada que es la
a 200 Kmh) y la salida estaraacute acotada en ese
dad decimos en que el sistema debe mante
ente y no debe tomar valores que sobrepasen
osible saber el
es actuales de
e su valor es
ontrol) la matriz de
go sea n y el
de un valor
anaacuteloga estos
e es definidoal 90 de su
al valor final
nal y el valor
ioacuten se habla
elocidades de
mismo rango
erse en estos
los liacutemites de
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 515
la estabilidad lo que se traduce en que los actuadores (ie motores) deben funcionar seguacuten
la capacidad que indica su fabricante no pueden ir maacutes allaacute de sus capacidades asiacute por
ejemplo un motor que no puede girar maacutes raacutepido que su velocidad sincroacutenica
- Stability in the sense of Lyapunov - Cuando el vehiacuteculo se encuentra en una velocidad
determinada y activamos el control de velocidad y lo fijamos en una velocidad cercana a lavelocidad que tenemos y el sistema permanecen cerca de la velocidad de referencia
notamos que el sistema de navegacioacuten es estable en el sentido de Lyapunov
-Asymptotic Stability- Cuando a partir de una velocidad inicial se llega exactamente
velocidad deseada y el vehiacuteculo mantiene la velocidad misma durante toda su trayectoria
decimos que es asintoacuteticamente estable Este comportamiento no es posible en el control de
la navegacioacuten ya que la velocidad variara muy poco alrededor de un valor pero no se
establece exactamente en un valor determinado
983085 Controlabilidad (Controllability)- En el control de navegacioacuten la controlabilidad significa
que tan bien se estabiliza la velocidad cuando el sistema se vuelve inestable debido a un
cambio suacutebito en la velocidad (ie frenado)
- Observabilidad (Observability)- El sistema puede ser o no observable dependiendo del
modelo empleado para conocer los estados internos del sistema debemos conocer las
variables de la salida de la navegacioacuten que en este caso es la velocidad la cual la podemos
medir con un sensor de velocidad como por ejemplo un tacogenerador encoder o alguacuten
otro dispositivo dependiendo el tipo de motor en el vehiacuteculo
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la
velocidad actual se acerque a la velocidad deseada cuando se hace un cambio tipo escaloacuten
en la referencia de velocidad
- Overshoot- Es el pico del valor de la velocidad a la que se llega cuando se aplica un
cambio de tipo escaloacuten en la referencia de la velocidad del sistema o tambieacuten en la entrada
del sistema la cual puede ser el acelerador del vehiacuteculo
- Steady State Error- Es la diferencia entre la velocidad deseada o de referencia y la
velocidad que alcanza el vehiacuteculo
- Control de Altura de un Avioacuten (Aircraft altitude control)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada Y la
salida tambieacuten seraacute acotada ya que las turbinas del avioacuten solo podraacuten funcionar seguacuten la
capacidad provista por el fabricante
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 615
- Stability in the sense of Lyapunov - Cuando el avioacuten se encuentra en altura determinada y
activamos el control de altitud y se lo fija en una altitud cercana a la altura que tenemos y
el avioacuten permanecen cerca de aquella de referencia entonces notamos que el sistema es
estable en el sentido de Lyapunov
- Asymptotic Stability- Cuando a partir de una altitud en la se encuentra volando el avioacuten
se llega exactamente a la altura deseada y el avioacuten mantiene la misma altura durante toda
su trayectoria decimos que es asintoacuteticamente estable Este tipo de comportamiento no es
posible en este sentido para este tipo de sistema
983085 Controlabilidad (Controllability)- Podemos decir que se refiere a que tan bien se puede
retomar el control de la altura del avioacuten cuando el sistema se vuelve inestable
- Observabilidad (Observability)- Se usan sensores de GPS altiacutemetros etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la altitud
actual se acerque a la altura deseada cuando se hace un cambio tipo escaloacuten en la referencia
de velocidad
- Overshoot- Podriacuteamos referirnos desde un punto de vista del funcionamiento de los
motores al pico maacuteximo de velocidad a la que llegan las turbinas del avioacuten cuando se
realiza un cambio en la altura de referencia del sistema
- Steady State Error- Diferencia entre la altura deseada o de referencia y la altura a la que
vuela el avioacuten
- Control de Temperatura (Temperature Control in a house)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada
Sentildeal de salida acotada hacia los actuadores
- Stability in the sense of Lyapunov ndash La temperatura de la casa se mantiene alrededor de
una temperatura establecida
983085 Controlabilidad (Controllability)- Se refiere a la capacidad de controlar un sistema de
temperatura inestable
- Observabilidad (Observability)- Se usan sensores de coacutemo termocuplas PT100 etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para los actuadores
que sirven para enfriar o calentar un ambiente se enciendan un cambio tipo escaloacuten en la
referencia de temperatura
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 715
- Overshoot- Potencia maacutexima instantaacutenea a la que llega el actuador que sirve para enfriar
o calentar un ambiente cuando se presenta un cambio en la variacioacuten del sistema
- Steady State Error- Es la diferencia entre la temperatura deseada o de referencia y la
temperatura se que alcanza dentro de la casa
(c) Explicar que es ldquoDisturbance Rejectionrdquo y sensibilidad a la variacioacuten de
paraacutemetros de la planta e identifique las perturbaciones y las variaciones en los
paraacutemetros de la planta de cada uno de los sistemas en (b) (Para esto se deberiacutea
describir el proceso dibujar el sistema de control para el proceso mostrar donde las
perturbaciones entran en el sistema y describir sus efectos en el lazo cerrado)
Disturbance Rejection - Todos los sistemas fiacutesicos tienen que lidiar con cierta cantidad de
ruido y perturbaciones La habilidad de un sistema para ignorar el ruido es conocida como
rechazo a la perturbacioacuten (Disturbance Rejection) de un sistema
Sensibilidad a la variacioacuten de Paraacutemetros (Sensitivity) - Se refiere a como se afecta nuestrosistema cuando realizamos alguacuten cambio en los paraacutemetro internos que caracterizan al
sistema Todo sistema que alguna vez se tratar de controlar tendraacute cambios Si se disentildea para alguacuten caso nominal y no dar cuenta de la variabilidad del sistema se puede tener un
sistema que es inestable por alguna situacioacuten
Control de Navegacioacuten (Cruise Control)
El propoacutesito del control de navegacioacuten es mantener la velocidad del vehiacuteculo constante Lamayor perturbacioacuten de este sistema es debido a los cambios en la pendiente del camino la
cual genera fuerzas en el vehiacuteculo debido a la gravedad En este sistema tambieacuten podemos
encontrar perturbaciones como son las fuerzas debidas al aire y la resistencia al rodamiento
Figura 1- Perturbacion Fuerzas Generadas debido a la pendiente del camino depende del
aacutengulo de inclinacioacuten)
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 815
Figura 2- Diagrama de blo
Fuerzas Gen
En cuanto a los paraacutemetros
pasajeros en el vehiacuteculo y el plos paraacutemetros pueden ser t
reemplazados debido a fallas
- Control de Altura de un A
Perturbaciones Algunas de la
del viento la turbulencia que
vibracioacuten al interior de una ae
(conflicto traacutefico aeacutereo y aves
Figura 3- Diag
Paraacutemetros En el motor de
dinaacutemica de vuelo como se cde cambio de velocidad (tan
afectan el movimiento del av
vaciacuteo en otras tambieacuten debe puede cambiar
Temperature Control in a
El problema con el control d
corrientes de aire o caliente qmencionar que el secador de
ues del control de navegacioacuten de un vehiacuteculo (
eradas debido a la pendiente del camino) [5]
e la planta que deben ser considerados estaacuten
eso de los mismos el combustible que se utilizdos los sistemas mecaacutenicos o hidraacuteulicos q
mantenimiento como son el motor pastillas d
ioacuten (Aircraft altitude control)
perturbaciones que tenemos en este sistema so
es una alteracioacuten en el flujo continuo del aire l
ronave) el Estado del clima (lluvioso seco etc
[4]
rama de bloques del control de Altura Avioacuten [6
un avioacuten motor tendremos desgastes En un a
nsume el combustible (peso de la aeronave etco de cambiar la forma en la que las superfic
oacuten) Un avioacuten puede estar lleno en algunas o
mos considerar que la constante de tiempo teacute
ouse
temperatura es la presencia de perturbaciones
ue llegan al sensor de temperatura asiacute por ejel cabello podriacutea causar una perturbacioacuten ya
erturbacioacuten
el nuacutemero de
a y en generale pueden ser
frenos etc
la velocidad
que provoca
las Aves
]
ioacuten cambia la
) La altitud yies de control
asiones y casi
rmica la cual
como son las
plo podemosue emite aire
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 915
caliente en el interior de un cuarto esta corriente de aire podriacutea llegar al sensor de la
temperatura causando asiacute una perturbacioacuten Otras de las perturbaciones maacutes comunes en el
control de la temperatura de una casa podriacutean ser las corrientes de aire frio o caliente quellegan desde el exterior Otra posible perturbacioacuten seria el vapor generado en la cocina de
ahiacute que el sensor de temperatura en este tipo de sistema debe estar en lugar donde se eviten
este tipo de perturbaciones
Figura 4- Diagrama de bloques del control de temperatura en una casa [7]
En cuanto a los paraacutemetros de la planta que deben ser considerados y que podriacutean variar el
comportamiento del sistema son los motores (enfriar) o calefactores las estaciones del antildeo
Si hablamos de un mismo sistema para el control de la temperatura usado en varios lugares podriacuteamos considerar una variacioacuten en los paraacutemetros (mismo sistema pero diferentes
paraacutemetros estaacuteticos) y de esta manera verificar un comportamiento del sistema en cada
lugar especiacutefico asiacute se puede apreciar el comportamiento del sistema seguacuten el tipo deconstruccioacuten hormigoacuten madera acero y los materiales teacutermicos utilizados para su
recubrimiento
EJERCICIO 13 (Fuzzy Control Desing Philosophy) Estos problemas se enfocaran en
el disentildeo de sistemas control Fuzzy
(a) iquestSe utiliza un modelo para el disentildeo de un sistema de control Fuzzy iquestCuaacutendo se
utiliza y queacute tipo de modelo es iquestDeberiacutea usarse un modelo iquestPor queacute iquestPor queacute no
Existen varias aplicaciones en las que no se necesita un modelo para implementar
directamente un controlador Fuzzy En esa situacioacuten no se necesita de un modelo formal
del proceso sin embargo estas aplicaciones no necesitan realmente de un controlador
debido a su estructura tan baacutesica Los modelos en siacute nos ayudan a entender el
comportamiento del sistema simular y por lo tanto a probar el controlador disentildeado De ahiacute
que es bueno el hecho de utilizar un modelo matemaacutetico en el disentildeo de un controlador
Fuzzy por lo tanto siempre es necesario un modelo si se quieren hacer bien las cosas
especialmente no se puede dejar de utilizar un modelo si se manejan aplicaciones criticas de
seguridad ya que no se podriacutean realizar la simulacioacuten y la evaluacioacuten del comportamiento
de dichos sistemas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 415
externas Un sistema es obser
comportamiento de todo el si
algunos de sus estados no
desconocido para el controlad
En un sistema lineal e invaria
Donde es vector de estado matriz de estados
trasmisioacuten directa
Matriz de Observabilidad
Se dice que un sistema es o
determinante sea distinto de c
- Rise time- Se refiere al
especiacutefico bajo a un valor
valores son el 10 y el 90como el tiempo requerido pa
valor final
- Overshoot- Es la magnitud
en el estado estable en un tip
- Steady State Error- Se defi
actual una vez que el sistema
(b) Dar ejemplos de las pro
- Control de navegacioacuten (Cr
- Estabilidad BIBO (BIBO
necesariamente de una estabi
referencia esta acotada (ie 0
Cuando hablamos de estabil
liacutemites funcionando correcta
able conociendo las salidas de un sistema es p
tema Si un sistema no es observable los valo
ueden ser determinados lo cual significa q
or
te en el tiempo LTI
vector de salida vector de entrada (o de matriz de entrada matriz de salida
bservable siempre que la matriz tenga un ra
ro [4]
iempo requerido para que una sentildeal cambi
especiacutefico alto Tiacutepicamente en electroacutenica
del valor final En teoriacutea de control rise tia que la respuesta se incremente desde el 10
por la cual una sentildeal o funcioacuten de salida exced
dado
ne como la diferencia entre el valor deseado
lcanza el estado estable
iedades en (a) para los siguientes sistemas
ise control)
Stability)- En el control de la navegac
idad BIBO debido a que la entrada que es la
a 200 Kmh) y la salida estaraacute acotada en ese
dad decimos en que el sistema debe mante
ente y no debe tomar valores que sobrepasen
osible saber el
es actuales de
e su valor es
ontrol) la matriz de
go sea n y el
de un valor
anaacuteloga estos
e es definidoal 90 de su
al valor final
nal y el valor
ioacuten se habla
elocidades de
mismo rango
erse en estos
los liacutemites de
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 515
la estabilidad lo que se traduce en que los actuadores (ie motores) deben funcionar seguacuten
la capacidad que indica su fabricante no pueden ir maacutes allaacute de sus capacidades asiacute por
ejemplo un motor que no puede girar maacutes raacutepido que su velocidad sincroacutenica
- Stability in the sense of Lyapunov - Cuando el vehiacuteculo se encuentra en una velocidad
determinada y activamos el control de velocidad y lo fijamos en una velocidad cercana a lavelocidad que tenemos y el sistema permanecen cerca de la velocidad de referencia
notamos que el sistema de navegacioacuten es estable en el sentido de Lyapunov
-Asymptotic Stability- Cuando a partir de una velocidad inicial se llega exactamente
velocidad deseada y el vehiacuteculo mantiene la velocidad misma durante toda su trayectoria
decimos que es asintoacuteticamente estable Este comportamiento no es posible en el control de
la navegacioacuten ya que la velocidad variara muy poco alrededor de un valor pero no se
establece exactamente en un valor determinado
983085 Controlabilidad (Controllability)- En el control de navegacioacuten la controlabilidad significa
que tan bien se estabiliza la velocidad cuando el sistema se vuelve inestable debido a un
cambio suacutebito en la velocidad (ie frenado)
- Observabilidad (Observability)- El sistema puede ser o no observable dependiendo del
modelo empleado para conocer los estados internos del sistema debemos conocer las
variables de la salida de la navegacioacuten que en este caso es la velocidad la cual la podemos
medir con un sensor de velocidad como por ejemplo un tacogenerador encoder o alguacuten
otro dispositivo dependiendo el tipo de motor en el vehiacuteculo
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la
velocidad actual se acerque a la velocidad deseada cuando se hace un cambio tipo escaloacuten
en la referencia de velocidad
- Overshoot- Es el pico del valor de la velocidad a la que se llega cuando se aplica un
cambio de tipo escaloacuten en la referencia de la velocidad del sistema o tambieacuten en la entrada
del sistema la cual puede ser el acelerador del vehiacuteculo
- Steady State Error- Es la diferencia entre la velocidad deseada o de referencia y la
velocidad que alcanza el vehiacuteculo
- Control de Altura de un Avioacuten (Aircraft altitude control)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada Y la
salida tambieacuten seraacute acotada ya que las turbinas del avioacuten solo podraacuten funcionar seguacuten la
capacidad provista por el fabricante
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 615
- Stability in the sense of Lyapunov - Cuando el avioacuten se encuentra en altura determinada y
activamos el control de altitud y se lo fija en una altitud cercana a la altura que tenemos y
el avioacuten permanecen cerca de aquella de referencia entonces notamos que el sistema es
estable en el sentido de Lyapunov
- Asymptotic Stability- Cuando a partir de una altitud en la se encuentra volando el avioacuten
se llega exactamente a la altura deseada y el avioacuten mantiene la misma altura durante toda
su trayectoria decimos que es asintoacuteticamente estable Este tipo de comportamiento no es
posible en este sentido para este tipo de sistema
983085 Controlabilidad (Controllability)- Podemos decir que se refiere a que tan bien se puede
retomar el control de la altura del avioacuten cuando el sistema se vuelve inestable
- Observabilidad (Observability)- Se usan sensores de GPS altiacutemetros etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la altitud
actual se acerque a la altura deseada cuando se hace un cambio tipo escaloacuten en la referencia
de velocidad
- Overshoot- Podriacuteamos referirnos desde un punto de vista del funcionamiento de los
motores al pico maacuteximo de velocidad a la que llegan las turbinas del avioacuten cuando se
realiza un cambio en la altura de referencia del sistema
- Steady State Error- Diferencia entre la altura deseada o de referencia y la altura a la que
vuela el avioacuten
- Control de Temperatura (Temperature Control in a house)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada
Sentildeal de salida acotada hacia los actuadores
- Stability in the sense of Lyapunov ndash La temperatura de la casa se mantiene alrededor de
una temperatura establecida
983085 Controlabilidad (Controllability)- Se refiere a la capacidad de controlar un sistema de
temperatura inestable
- Observabilidad (Observability)- Se usan sensores de coacutemo termocuplas PT100 etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para los actuadores
que sirven para enfriar o calentar un ambiente se enciendan un cambio tipo escaloacuten en la
referencia de temperatura
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 715
- Overshoot- Potencia maacutexima instantaacutenea a la que llega el actuador que sirve para enfriar
o calentar un ambiente cuando se presenta un cambio en la variacioacuten del sistema
- Steady State Error- Es la diferencia entre la temperatura deseada o de referencia y la
temperatura se que alcanza dentro de la casa
(c) Explicar que es ldquoDisturbance Rejectionrdquo y sensibilidad a la variacioacuten de
paraacutemetros de la planta e identifique las perturbaciones y las variaciones en los
paraacutemetros de la planta de cada uno de los sistemas en (b) (Para esto se deberiacutea
describir el proceso dibujar el sistema de control para el proceso mostrar donde las
perturbaciones entran en el sistema y describir sus efectos en el lazo cerrado)
Disturbance Rejection - Todos los sistemas fiacutesicos tienen que lidiar con cierta cantidad de
ruido y perturbaciones La habilidad de un sistema para ignorar el ruido es conocida como
rechazo a la perturbacioacuten (Disturbance Rejection) de un sistema
Sensibilidad a la variacioacuten de Paraacutemetros (Sensitivity) - Se refiere a como se afecta nuestrosistema cuando realizamos alguacuten cambio en los paraacutemetro internos que caracterizan al
sistema Todo sistema que alguna vez se tratar de controlar tendraacute cambios Si se disentildea para alguacuten caso nominal y no dar cuenta de la variabilidad del sistema se puede tener un
sistema que es inestable por alguna situacioacuten
Control de Navegacioacuten (Cruise Control)
El propoacutesito del control de navegacioacuten es mantener la velocidad del vehiacuteculo constante Lamayor perturbacioacuten de este sistema es debido a los cambios en la pendiente del camino la
cual genera fuerzas en el vehiacuteculo debido a la gravedad En este sistema tambieacuten podemos
encontrar perturbaciones como son las fuerzas debidas al aire y la resistencia al rodamiento
Figura 1- Perturbacion Fuerzas Generadas debido a la pendiente del camino depende del
aacutengulo de inclinacioacuten)
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 815
Figura 2- Diagrama de blo
Fuerzas Gen
En cuanto a los paraacutemetros
pasajeros en el vehiacuteculo y el plos paraacutemetros pueden ser t
reemplazados debido a fallas
- Control de Altura de un A
Perturbaciones Algunas de la
del viento la turbulencia que
vibracioacuten al interior de una ae
(conflicto traacutefico aeacutereo y aves
Figura 3- Diag
Paraacutemetros En el motor de
dinaacutemica de vuelo como se cde cambio de velocidad (tan
afectan el movimiento del av
vaciacuteo en otras tambieacuten debe puede cambiar
Temperature Control in a
El problema con el control d
corrientes de aire o caliente qmencionar que el secador de
ues del control de navegacioacuten de un vehiacuteculo (
eradas debido a la pendiente del camino) [5]
e la planta que deben ser considerados estaacuten
eso de los mismos el combustible que se utilizdos los sistemas mecaacutenicos o hidraacuteulicos q
mantenimiento como son el motor pastillas d
ioacuten (Aircraft altitude control)
perturbaciones que tenemos en este sistema so
es una alteracioacuten en el flujo continuo del aire l
ronave) el Estado del clima (lluvioso seco etc
[4]
rama de bloques del control de Altura Avioacuten [6
un avioacuten motor tendremos desgastes En un a
nsume el combustible (peso de la aeronave etco de cambiar la forma en la que las superfic
oacuten) Un avioacuten puede estar lleno en algunas o
mos considerar que la constante de tiempo teacute
ouse
temperatura es la presencia de perturbaciones
ue llegan al sensor de temperatura asiacute por ejel cabello podriacutea causar una perturbacioacuten ya
erturbacioacuten
el nuacutemero de
a y en generale pueden ser
frenos etc
la velocidad
que provoca
las Aves
]
ioacuten cambia la
) La altitud yies de control
asiones y casi
rmica la cual
como son las
plo podemosue emite aire
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 915
caliente en el interior de un cuarto esta corriente de aire podriacutea llegar al sensor de la
temperatura causando asiacute una perturbacioacuten Otras de las perturbaciones maacutes comunes en el
control de la temperatura de una casa podriacutean ser las corrientes de aire frio o caliente quellegan desde el exterior Otra posible perturbacioacuten seria el vapor generado en la cocina de
ahiacute que el sensor de temperatura en este tipo de sistema debe estar en lugar donde se eviten
este tipo de perturbaciones
Figura 4- Diagrama de bloques del control de temperatura en una casa [7]
En cuanto a los paraacutemetros de la planta que deben ser considerados y que podriacutean variar el
comportamiento del sistema son los motores (enfriar) o calefactores las estaciones del antildeo
Si hablamos de un mismo sistema para el control de la temperatura usado en varios lugares podriacuteamos considerar una variacioacuten en los paraacutemetros (mismo sistema pero diferentes
paraacutemetros estaacuteticos) y de esta manera verificar un comportamiento del sistema en cada
lugar especiacutefico asiacute se puede apreciar el comportamiento del sistema seguacuten el tipo deconstruccioacuten hormigoacuten madera acero y los materiales teacutermicos utilizados para su
recubrimiento
EJERCICIO 13 (Fuzzy Control Desing Philosophy) Estos problemas se enfocaran en
el disentildeo de sistemas control Fuzzy
(a) iquestSe utiliza un modelo para el disentildeo de un sistema de control Fuzzy iquestCuaacutendo se
utiliza y queacute tipo de modelo es iquestDeberiacutea usarse un modelo iquestPor queacute iquestPor queacute no
Existen varias aplicaciones en las que no se necesita un modelo para implementar
directamente un controlador Fuzzy En esa situacioacuten no se necesita de un modelo formal
del proceso sin embargo estas aplicaciones no necesitan realmente de un controlador
debido a su estructura tan baacutesica Los modelos en siacute nos ayudan a entender el
comportamiento del sistema simular y por lo tanto a probar el controlador disentildeado De ahiacute
que es bueno el hecho de utilizar un modelo matemaacutetico en el disentildeo de un controlador
Fuzzy por lo tanto siempre es necesario un modelo si se quieren hacer bien las cosas
especialmente no se puede dejar de utilizar un modelo si se manejan aplicaciones criticas de
seguridad ya que no se podriacutean realizar la simulacioacuten y la evaluacioacuten del comportamiento
de dichos sistemas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 515
la estabilidad lo que se traduce en que los actuadores (ie motores) deben funcionar seguacuten
la capacidad que indica su fabricante no pueden ir maacutes allaacute de sus capacidades asiacute por
ejemplo un motor que no puede girar maacutes raacutepido que su velocidad sincroacutenica
- Stability in the sense of Lyapunov - Cuando el vehiacuteculo se encuentra en una velocidad
determinada y activamos el control de velocidad y lo fijamos en una velocidad cercana a lavelocidad que tenemos y el sistema permanecen cerca de la velocidad de referencia
notamos que el sistema de navegacioacuten es estable en el sentido de Lyapunov
-Asymptotic Stability- Cuando a partir de una velocidad inicial se llega exactamente
velocidad deseada y el vehiacuteculo mantiene la velocidad misma durante toda su trayectoria
decimos que es asintoacuteticamente estable Este comportamiento no es posible en el control de
la navegacioacuten ya que la velocidad variara muy poco alrededor de un valor pero no se
establece exactamente en un valor determinado
983085 Controlabilidad (Controllability)- En el control de navegacioacuten la controlabilidad significa
que tan bien se estabiliza la velocidad cuando el sistema se vuelve inestable debido a un
cambio suacutebito en la velocidad (ie frenado)
- Observabilidad (Observability)- El sistema puede ser o no observable dependiendo del
modelo empleado para conocer los estados internos del sistema debemos conocer las
variables de la salida de la navegacioacuten que en este caso es la velocidad la cual la podemos
medir con un sensor de velocidad como por ejemplo un tacogenerador encoder o alguacuten
otro dispositivo dependiendo el tipo de motor en el vehiacuteculo
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la
velocidad actual se acerque a la velocidad deseada cuando se hace un cambio tipo escaloacuten
en la referencia de velocidad
- Overshoot- Es el pico del valor de la velocidad a la que se llega cuando se aplica un
cambio de tipo escaloacuten en la referencia de la velocidad del sistema o tambieacuten en la entrada
del sistema la cual puede ser el acelerador del vehiacuteculo
- Steady State Error- Es la diferencia entre la velocidad deseada o de referencia y la
velocidad que alcanza el vehiacuteculo
- Control de Altura de un Avioacuten (Aircraft altitude control)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada Y la
salida tambieacuten seraacute acotada ya que las turbinas del avioacuten solo podraacuten funcionar seguacuten la
capacidad provista por el fabricante
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 615
- Stability in the sense of Lyapunov - Cuando el avioacuten se encuentra en altura determinada y
activamos el control de altitud y se lo fija en una altitud cercana a la altura que tenemos y
el avioacuten permanecen cerca de aquella de referencia entonces notamos que el sistema es
estable en el sentido de Lyapunov
- Asymptotic Stability- Cuando a partir de una altitud en la se encuentra volando el avioacuten
se llega exactamente a la altura deseada y el avioacuten mantiene la misma altura durante toda
su trayectoria decimos que es asintoacuteticamente estable Este tipo de comportamiento no es
posible en este sentido para este tipo de sistema
983085 Controlabilidad (Controllability)- Podemos decir que se refiere a que tan bien se puede
retomar el control de la altura del avioacuten cuando el sistema se vuelve inestable
- Observabilidad (Observability)- Se usan sensores de GPS altiacutemetros etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la altitud
actual se acerque a la altura deseada cuando se hace un cambio tipo escaloacuten en la referencia
de velocidad
- Overshoot- Podriacuteamos referirnos desde un punto de vista del funcionamiento de los
motores al pico maacuteximo de velocidad a la que llegan las turbinas del avioacuten cuando se
realiza un cambio en la altura de referencia del sistema
- Steady State Error- Diferencia entre la altura deseada o de referencia y la altura a la que
vuela el avioacuten
- Control de Temperatura (Temperature Control in a house)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada
Sentildeal de salida acotada hacia los actuadores
- Stability in the sense of Lyapunov ndash La temperatura de la casa se mantiene alrededor de
una temperatura establecida
983085 Controlabilidad (Controllability)- Se refiere a la capacidad de controlar un sistema de
temperatura inestable
- Observabilidad (Observability)- Se usan sensores de coacutemo termocuplas PT100 etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para los actuadores
que sirven para enfriar o calentar un ambiente se enciendan un cambio tipo escaloacuten en la
referencia de temperatura
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 715
- Overshoot- Potencia maacutexima instantaacutenea a la que llega el actuador que sirve para enfriar
o calentar un ambiente cuando se presenta un cambio en la variacioacuten del sistema
- Steady State Error- Es la diferencia entre la temperatura deseada o de referencia y la
temperatura se que alcanza dentro de la casa
(c) Explicar que es ldquoDisturbance Rejectionrdquo y sensibilidad a la variacioacuten de
paraacutemetros de la planta e identifique las perturbaciones y las variaciones en los
paraacutemetros de la planta de cada uno de los sistemas en (b) (Para esto se deberiacutea
describir el proceso dibujar el sistema de control para el proceso mostrar donde las
perturbaciones entran en el sistema y describir sus efectos en el lazo cerrado)
Disturbance Rejection - Todos los sistemas fiacutesicos tienen que lidiar con cierta cantidad de
ruido y perturbaciones La habilidad de un sistema para ignorar el ruido es conocida como
rechazo a la perturbacioacuten (Disturbance Rejection) de un sistema
Sensibilidad a la variacioacuten de Paraacutemetros (Sensitivity) - Se refiere a como se afecta nuestrosistema cuando realizamos alguacuten cambio en los paraacutemetro internos que caracterizan al
sistema Todo sistema que alguna vez se tratar de controlar tendraacute cambios Si se disentildea para alguacuten caso nominal y no dar cuenta de la variabilidad del sistema se puede tener un
sistema que es inestable por alguna situacioacuten
Control de Navegacioacuten (Cruise Control)
El propoacutesito del control de navegacioacuten es mantener la velocidad del vehiacuteculo constante Lamayor perturbacioacuten de este sistema es debido a los cambios en la pendiente del camino la
cual genera fuerzas en el vehiacuteculo debido a la gravedad En este sistema tambieacuten podemos
encontrar perturbaciones como son las fuerzas debidas al aire y la resistencia al rodamiento
Figura 1- Perturbacion Fuerzas Generadas debido a la pendiente del camino depende del
aacutengulo de inclinacioacuten)
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 815
Figura 2- Diagrama de blo
Fuerzas Gen
En cuanto a los paraacutemetros
pasajeros en el vehiacuteculo y el plos paraacutemetros pueden ser t
reemplazados debido a fallas
- Control de Altura de un A
Perturbaciones Algunas de la
del viento la turbulencia que
vibracioacuten al interior de una ae
(conflicto traacutefico aeacutereo y aves
Figura 3- Diag
Paraacutemetros En el motor de
dinaacutemica de vuelo como se cde cambio de velocidad (tan
afectan el movimiento del av
vaciacuteo en otras tambieacuten debe puede cambiar
Temperature Control in a
El problema con el control d
corrientes de aire o caliente qmencionar que el secador de
ues del control de navegacioacuten de un vehiacuteculo (
eradas debido a la pendiente del camino) [5]
e la planta que deben ser considerados estaacuten
eso de los mismos el combustible que se utilizdos los sistemas mecaacutenicos o hidraacuteulicos q
mantenimiento como son el motor pastillas d
ioacuten (Aircraft altitude control)
perturbaciones que tenemos en este sistema so
es una alteracioacuten en el flujo continuo del aire l
ronave) el Estado del clima (lluvioso seco etc
[4]
rama de bloques del control de Altura Avioacuten [6
un avioacuten motor tendremos desgastes En un a
nsume el combustible (peso de la aeronave etco de cambiar la forma en la que las superfic
oacuten) Un avioacuten puede estar lleno en algunas o
mos considerar que la constante de tiempo teacute
ouse
temperatura es la presencia de perturbaciones
ue llegan al sensor de temperatura asiacute por ejel cabello podriacutea causar una perturbacioacuten ya
erturbacioacuten
el nuacutemero de
a y en generale pueden ser
frenos etc
la velocidad
que provoca
las Aves
]
ioacuten cambia la
) La altitud yies de control
asiones y casi
rmica la cual
como son las
plo podemosue emite aire
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 915
caliente en el interior de un cuarto esta corriente de aire podriacutea llegar al sensor de la
temperatura causando asiacute una perturbacioacuten Otras de las perturbaciones maacutes comunes en el
control de la temperatura de una casa podriacutean ser las corrientes de aire frio o caliente quellegan desde el exterior Otra posible perturbacioacuten seria el vapor generado en la cocina de
ahiacute que el sensor de temperatura en este tipo de sistema debe estar en lugar donde se eviten
este tipo de perturbaciones
Figura 4- Diagrama de bloques del control de temperatura en una casa [7]
En cuanto a los paraacutemetros de la planta que deben ser considerados y que podriacutean variar el
comportamiento del sistema son los motores (enfriar) o calefactores las estaciones del antildeo
Si hablamos de un mismo sistema para el control de la temperatura usado en varios lugares podriacuteamos considerar una variacioacuten en los paraacutemetros (mismo sistema pero diferentes
paraacutemetros estaacuteticos) y de esta manera verificar un comportamiento del sistema en cada
lugar especiacutefico asiacute se puede apreciar el comportamiento del sistema seguacuten el tipo deconstruccioacuten hormigoacuten madera acero y los materiales teacutermicos utilizados para su
recubrimiento
EJERCICIO 13 (Fuzzy Control Desing Philosophy) Estos problemas se enfocaran en
el disentildeo de sistemas control Fuzzy
(a) iquestSe utiliza un modelo para el disentildeo de un sistema de control Fuzzy iquestCuaacutendo se
utiliza y queacute tipo de modelo es iquestDeberiacutea usarse un modelo iquestPor queacute iquestPor queacute no
Existen varias aplicaciones en las que no se necesita un modelo para implementar
directamente un controlador Fuzzy En esa situacioacuten no se necesita de un modelo formal
del proceso sin embargo estas aplicaciones no necesitan realmente de un controlador
debido a su estructura tan baacutesica Los modelos en siacute nos ayudan a entender el
comportamiento del sistema simular y por lo tanto a probar el controlador disentildeado De ahiacute
que es bueno el hecho de utilizar un modelo matemaacutetico en el disentildeo de un controlador
Fuzzy por lo tanto siempre es necesario un modelo si se quieren hacer bien las cosas
especialmente no se puede dejar de utilizar un modelo si se manejan aplicaciones criticas de
seguridad ya que no se podriacutean realizar la simulacioacuten y la evaluacioacuten del comportamiento
de dichos sistemas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt
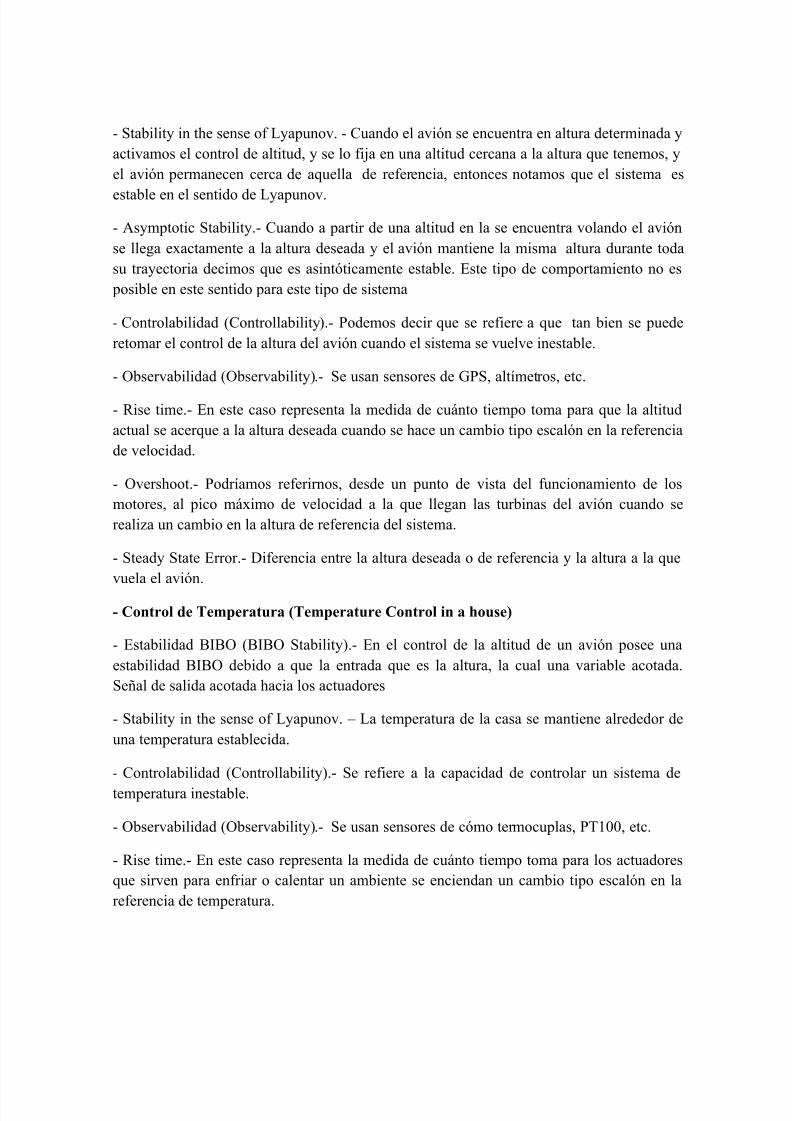
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 615
- Stability in the sense of Lyapunov - Cuando el avioacuten se encuentra en altura determinada y
activamos el control de altitud y se lo fija en una altitud cercana a la altura que tenemos y
el avioacuten permanecen cerca de aquella de referencia entonces notamos que el sistema es
estable en el sentido de Lyapunov
- Asymptotic Stability- Cuando a partir de una altitud en la se encuentra volando el avioacuten
se llega exactamente a la altura deseada y el avioacuten mantiene la misma altura durante toda
su trayectoria decimos que es asintoacuteticamente estable Este tipo de comportamiento no es
posible en este sentido para este tipo de sistema
983085 Controlabilidad (Controllability)- Podemos decir que se refiere a que tan bien se puede
retomar el control de la altura del avioacuten cuando el sistema se vuelve inestable
- Observabilidad (Observability)- Se usan sensores de GPS altiacutemetros etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para que la altitud
actual se acerque a la altura deseada cuando se hace un cambio tipo escaloacuten en la referencia
de velocidad
- Overshoot- Podriacuteamos referirnos desde un punto de vista del funcionamiento de los
motores al pico maacuteximo de velocidad a la que llegan las turbinas del avioacuten cuando se
realiza un cambio en la altura de referencia del sistema
- Steady State Error- Diferencia entre la altura deseada o de referencia y la altura a la que
vuela el avioacuten
- Control de Temperatura (Temperature Control in a house)
- Estabilidad BIBO (BIBO Stability)- En el control de la altitud de un avioacuten posee una
estabilidad BIBO debido a que la entrada que es la altura la cual una variable acotada
Sentildeal de salida acotada hacia los actuadores
- Stability in the sense of Lyapunov ndash La temperatura de la casa se mantiene alrededor de
una temperatura establecida
983085 Controlabilidad (Controllability)- Se refiere a la capacidad de controlar un sistema de
temperatura inestable
- Observabilidad (Observability)- Se usan sensores de coacutemo termocuplas PT100 etc
- Rise time- En este caso representa la medida de cuaacutento tiempo toma para los actuadores
que sirven para enfriar o calentar un ambiente se enciendan un cambio tipo escaloacuten en la
referencia de temperatura
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 715
- Overshoot- Potencia maacutexima instantaacutenea a la que llega el actuador que sirve para enfriar
o calentar un ambiente cuando se presenta un cambio en la variacioacuten del sistema
- Steady State Error- Es la diferencia entre la temperatura deseada o de referencia y la
temperatura se que alcanza dentro de la casa
(c) Explicar que es ldquoDisturbance Rejectionrdquo y sensibilidad a la variacioacuten de
paraacutemetros de la planta e identifique las perturbaciones y las variaciones en los
paraacutemetros de la planta de cada uno de los sistemas en (b) (Para esto se deberiacutea
describir el proceso dibujar el sistema de control para el proceso mostrar donde las
perturbaciones entran en el sistema y describir sus efectos en el lazo cerrado)
Disturbance Rejection - Todos los sistemas fiacutesicos tienen que lidiar con cierta cantidad de
ruido y perturbaciones La habilidad de un sistema para ignorar el ruido es conocida como
rechazo a la perturbacioacuten (Disturbance Rejection) de un sistema
Sensibilidad a la variacioacuten de Paraacutemetros (Sensitivity) - Se refiere a como se afecta nuestrosistema cuando realizamos alguacuten cambio en los paraacutemetro internos que caracterizan al
sistema Todo sistema que alguna vez se tratar de controlar tendraacute cambios Si se disentildea para alguacuten caso nominal y no dar cuenta de la variabilidad del sistema se puede tener un
sistema que es inestable por alguna situacioacuten
Control de Navegacioacuten (Cruise Control)
El propoacutesito del control de navegacioacuten es mantener la velocidad del vehiacuteculo constante Lamayor perturbacioacuten de este sistema es debido a los cambios en la pendiente del camino la
cual genera fuerzas en el vehiacuteculo debido a la gravedad En este sistema tambieacuten podemos
encontrar perturbaciones como son las fuerzas debidas al aire y la resistencia al rodamiento
Figura 1- Perturbacion Fuerzas Generadas debido a la pendiente del camino depende del
aacutengulo de inclinacioacuten)
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 815
Figura 2- Diagrama de blo
Fuerzas Gen
En cuanto a los paraacutemetros
pasajeros en el vehiacuteculo y el plos paraacutemetros pueden ser t
reemplazados debido a fallas
- Control de Altura de un A
Perturbaciones Algunas de la
del viento la turbulencia que
vibracioacuten al interior de una ae
(conflicto traacutefico aeacutereo y aves
Figura 3- Diag
Paraacutemetros En el motor de
dinaacutemica de vuelo como se cde cambio de velocidad (tan
afectan el movimiento del av
vaciacuteo en otras tambieacuten debe puede cambiar
Temperature Control in a
El problema con el control d
corrientes de aire o caliente qmencionar que el secador de
ues del control de navegacioacuten de un vehiacuteculo (
eradas debido a la pendiente del camino) [5]
e la planta que deben ser considerados estaacuten
eso de los mismos el combustible que se utilizdos los sistemas mecaacutenicos o hidraacuteulicos q
mantenimiento como son el motor pastillas d
ioacuten (Aircraft altitude control)
perturbaciones que tenemos en este sistema so
es una alteracioacuten en el flujo continuo del aire l
ronave) el Estado del clima (lluvioso seco etc
[4]
rama de bloques del control de Altura Avioacuten [6
un avioacuten motor tendremos desgastes En un a
nsume el combustible (peso de la aeronave etco de cambiar la forma en la que las superfic
oacuten) Un avioacuten puede estar lleno en algunas o
mos considerar que la constante de tiempo teacute
ouse
temperatura es la presencia de perturbaciones
ue llegan al sensor de temperatura asiacute por ejel cabello podriacutea causar una perturbacioacuten ya
erturbacioacuten
el nuacutemero de
a y en generale pueden ser
frenos etc
la velocidad
que provoca
las Aves
]
ioacuten cambia la
) La altitud yies de control
asiones y casi
rmica la cual
como son las
plo podemosue emite aire
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 915
caliente en el interior de un cuarto esta corriente de aire podriacutea llegar al sensor de la
temperatura causando asiacute una perturbacioacuten Otras de las perturbaciones maacutes comunes en el
control de la temperatura de una casa podriacutean ser las corrientes de aire frio o caliente quellegan desde el exterior Otra posible perturbacioacuten seria el vapor generado en la cocina de
ahiacute que el sensor de temperatura en este tipo de sistema debe estar en lugar donde se eviten
este tipo de perturbaciones
Figura 4- Diagrama de bloques del control de temperatura en una casa [7]
En cuanto a los paraacutemetros de la planta que deben ser considerados y que podriacutean variar el
comportamiento del sistema son los motores (enfriar) o calefactores las estaciones del antildeo
Si hablamos de un mismo sistema para el control de la temperatura usado en varios lugares podriacuteamos considerar una variacioacuten en los paraacutemetros (mismo sistema pero diferentes
paraacutemetros estaacuteticos) y de esta manera verificar un comportamiento del sistema en cada
lugar especiacutefico asiacute se puede apreciar el comportamiento del sistema seguacuten el tipo deconstruccioacuten hormigoacuten madera acero y los materiales teacutermicos utilizados para su
recubrimiento
EJERCICIO 13 (Fuzzy Control Desing Philosophy) Estos problemas se enfocaran en
el disentildeo de sistemas control Fuzzy
(a) iquestSe utiliza un modelo para el disentildeo de un sistema de control Fuzzy iquestCuaacutendo se
utiliza y queacute tipo de modelo es iquestDeberiacutea usarse un modelo iquestPor queacute iquestPor queacute no
Existen varias aplicaciones en las que no se necesita un modelo para implementar
directamente un controlador Fuzzy En esa situacioacuten no se necesita de un modelo formal
del proceso sin embargo estas aplicaciones no necesitan realmente de un controlador
debido a su estructura tan baacutesica Los modelos en siacute nos ayudan a entender el
comportamiento del sistema simular y por lo tanto a probar el controlador disentildeado De ahiacute
que es bueno el hecho de utilizar un modelo matemaacutetico en el disentildeo de un controlador
Fuzzy por lo tanto siempre es necesario un modelo si se quieren hacer bien las cosas
especialmente no se puede dejar de utilizar un modelo si se manejan aplicaciones criticas de
seguridad ya que no se podriacutean realizar la simulacioacuten y la evaluacioacuten del comportamiento
de dichos sistemas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 715
- Overshoot- Potencia maacutexima instantaacutenea a la que llega el actuador que sirve para enfriar
o calentar un ambiente cuando se presenta un cambio en la variacioacuten del sistema
- Steady State Error- Es la diferencia entre la temperatura deseada o de referencia y la
temperatura se que alcanza dentro de la casa
(c) Explicar que es ldquoDisturbance Rejectionrdquo y sensibilidad a la variacioacuten de
paraacutemetros de la planta e identifique las perturbaciones y las variaciones en los
paraacutemetros de la planta de cada uno de los sistemas en (b) (Para esto se deberiacutea
describir el proceso dibujar el sistema de control para el proceso mostrar donde las
perturbaciones entran en el sistema y describir sus efectos en el lazo cerrado)
Disturbance Rejection - Todos los sistemas fiacutesicos tienen que lidiar con cierta cantidad de
ruido y perturbaciones La habilidad de un sistema para ignorar el ruido es conocida como
rechazo a la perturbacioacuten (Disturbance Rejection) de un sistema
Sensibilidad a la variacioacuten de Paraacutemetros (Sensitivity) - Se refiere a como se afecta nuestrosistema cuando realizamos alguacuten cambio en los paraacutemetro internos que caracterizan al
sistema Todo sistema que alguna vez se tratar de controlar tendraacute cambios Si se disentildea para alguacuten caso nominal y no dar cuenta de la variabilidad del sistema se puede tener un
sistema que es inestable por alguna situacioacuten
Control de Navegacioacuten (Cruise Control)
El propoacutesito del control de navegacioacuten es mantener la velocidad del vehiacuteculo constante Lamayor perturbacioacuten de este sistema es debido a los cambios en la pendiente del camino la
cual genera fuerzas en el vehiacuteculo debido a la gravedad En este sistema tambieacuten podemos
encontrar perturbaciones como son las fuerzas debidas al aire y la resistencia al rodamiento
Figura 1- Perturbacion Fuerzas Generadas debido a la pendiente del camino depende del
aacutengulo de inclinacioacuten)
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 815
Figura 2- Diagrama de blo
Fuerzas Gen
En cuanto a los paraacutemetros
pasajeros en el vehiacuteculo y el plos paraacutemetros pueden ser t
reemplazados debido a fallas
- Control de Altura de un A
Perturbaciones Algunas de la
del viento la turbulencia que
vibracioacuten al interior de una ae
(conflicto traacutefico aeacutereo y aves
Figura 3- Diag
Paraacutemetros En el motor de
dinaacutemica de vuelo como se cde cambio de velocidad (tan
afectan el movimiento del av
vaciacuteo en otras tambieacuten debe puede cambiar
Temperature Control in a
El problema con el control d
corrientes de aire o caliente qmencionar que el secador de
ues del control de navegacioacuten de un vehiacuteculo (
eradas debido a la pendiente del camino) [5]
e la planta que deben ser considerados estaacuten
eso de los mismos el combustible que se utilizdos los sistemas mecaacutenicos o hidraacuteulicos q
mantenimiento como son el motor pastillas d
ioacuten (Aircraft altitude control)
perturbaciones que tenemos en este sistema so
es una alteracioacuten en el flujo continuo del aire l
ronave) el Estado del clima (lluvioso seco etc
[4]
rama de bloques del control de Altura Avioacuten [6
un avioacuten motor tendremos desgastes En un a
nsume el combustible (peso de la aeronave etco de cambiar la forma en la que las superfic
oacuten) Un avioacuten puede estar lleno en algunas o
mos considerar que la constante de tiempo teacute
ouse
temperatura es la presencia de perturbaciones
ue llegan al sensor de temperatura asiacute por ejel cabello podriacutea causar una perturbacioacuten ya
erturbacioacuten
el nuacutemero de
a y en generale pueden ser
frenos etc
la velocidad
que provoca
las Aves
]
ioacuten cambia la
) La altitud yies de control
asiones y casi
rmica la cual
como son las
plo podemosue emite aire
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 915
caliente en el interior de un cuarto esta corriente de aire podriacutea llegar al sensor de la
temperatura causando asiacute una perturbacioacuten Otras de las perturbaciones maacutes comunes en el
control de la temperatura de una casa podriacutean ser las corrientes de aire frio o caliente quellegan desde el exterior Otra posible perturbacioacuten seria el vapor generado en la cocina de
ahiacute que el sensor de temperatura en este tipo de sistema debe estar en lugar donde se eviten
este tipo de perturbaciones
Figura 4- Diagrama de bloques del control de temperatura en una casa [7]
En cuanto a los paraacutemetros de la planta que deben ser considerados y que podriacutean variar el
comportamiento del sistema son los motores (enfriar) o calefactores las estaciones del antildeo
Si hablamos de un mismo sistema para el control de la temperatura usado en varios lugares podriacuteamos considerar una variacioacuten en los paraacutemetros (mismo sistema pero diferentes
paraacutemetros estaacuteticos) y de esta manera verificar un comportamiento del sistema en cada
lugar especiacutefico asiacute se puede apreciar el comportamiento del sistema seguacuten el tipo deconstruccioacuten hormigoacuten madera acero y los materiales teacutermicos utilizados para su
recubrimiento
EJERCICIO 13 (Fuzzy Control Desing Philosophy) Estos problemas se enfocaran en
el disentildeo de sistemas control Fuzzy
(a) iquestSe utiliza un modelo para el disentildeo de un sistema de control Fuzzy iquestCuaacutendo se
utiliza y queacute tipo de modelo es iquestDeberiacutea usarse un modelo iquestPor queacute iquestPor queacute no
Existen varias aplicaciones en las que no se necesita un modelo para implementar
directamente un controlador Fuzzy En esa situacioacuten no se necesita de un modelo formal
del proceso sin embargo estas aplicaciones no necesitan realmente de un controlador
debido a su estructura tan baacutesica Los modelos en siacute nos ayudan a entender el
comportamiento del sistema simular y por lo tanto a probar el controlador disentildeado De ahiacute
que es bueno el hecho de utilizar un modelo matemaacutetico en el disentildeo de un controlador
Fuzzy por lo tanto siempre es necesario un modelo si se quieren hacer bien las cosas
especialmente no se puede dejar de utilizar un modelo si se manejan aplicaciones criticas de
seguridad ya que no se podriacutean realizar la simulacioacuten y la evaluacioacuten del comportamiento
de dichos sistemas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt
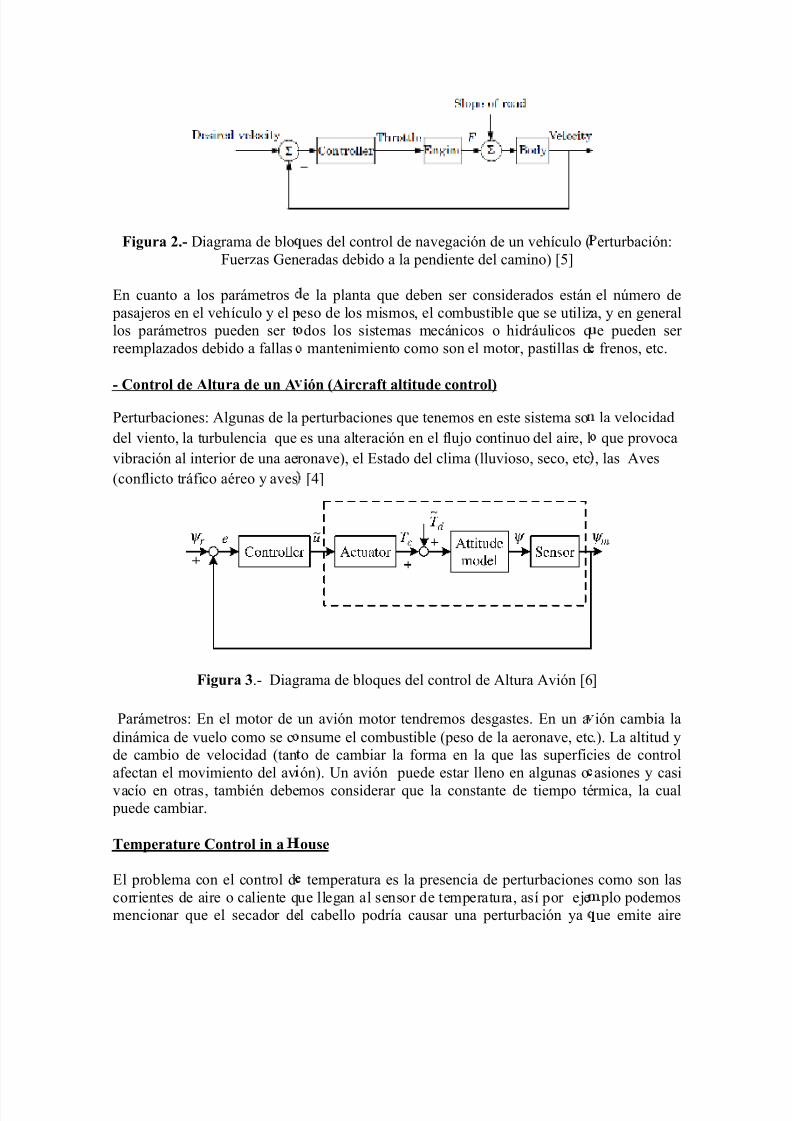
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 815
Figura 2- Diagrama de blo
Fuerzas Gen
En cuanto a los paraacutemetros
pasajeros en el vehiacuteculo y el plos paraacutemetros pueden ser t
reemplazados debido a fallas
- Control de Altura de un A
Perturbaciones Algunas de la
del viento la turbulencia que
vibracioacuten al interior de una ae
(conflicto traacutefico aeacutereo y aves
Figura 3- Diag
Paraacutemetros En el motor de
dinaacutemica de vuelo como se cde cambio de velocidad (tan
afectan el movimiento del av
vaciacuteo en otras tambieacuten debe puede cambiar
Temperature Control in a
El problema con el control d
corrientes de aire o caliente qmencionar que el secador de
ues del control de navegacioacuten de un vehiacuteculo (
eradas debido a la pendiente del camino) [5]
e la planta que deben ser considerados estaacuten
eso de los mismos el combustible que se utilizdos los sistemas mecaacutenicos o hidraacuteulicos q
mantenimiento como son el motor pastillas d
ioacuten (Aircraft altitude control)
perturbaciones que tenemos en este sistema so
es una alteracioacuten en el flujo continuo del aire l
ronave) el Estado del clima (lluvioso seco etc
[4]
rama de bloques del control de Altura Avioacuten [6
un avioacuten motor tendremos desgastes En un a
nsume el combustible (peso de la aeronave etco de cambiar la forma en la que las superfic
oacuten) Un avioacuten puede estar lleno en algunas o
mos considerar que la constante de tiempo teacute
ouse
temperatura es la presencia de perturbaciones
ue llegan al sensor de temperatura asiacute por ejel cabello podriacutea causar una perturbacioacuten ya
erturbacioacuten
el nuacutemero de
a y en generale pueden ser
frenos etc
la velocidad
que provoca
las Aves
]
ioacuten cambia la
) La altitud yies de control
asiones y casi
rmica la cual
como son las
plo podemosue emite aire
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 915
caliente en el interior de un cuarto esta corriente de aire podriacutea llegar al sensor de la
temperatura causando asiacute una perturbacioacuten Otras de las perturbaciones maacutes comunes en el
control de la temperatura de una casa podriacutean ser las corrientes de aire frio o caliente quellegan desde el exterior Otra posible perturbacioacuten seria el vapor generado en la cocina de
ahiacute que el sensor de temperatura en este tipo de sistema debe estar en lugar donde se eviten
este tipo de perturbaciones
Figura 4- Diagrama de bloques del control de temperatura en una casa [7]
En cuanto a los paraacutemetros de la planta que deben ser considerados y que podriacutean variar el
comportamiento del sistema son los motores (enfriar) o calefactores las estaciones del antildeo
Si hablamos de un mismo sistema para el control de la temperatura usado en varios lugares podriacuteamos considerar una variacioacuten en los paraacutemetros (mismo sistema pero diferentes
paraacutemetros estaacuteticos) y de esta manera verificar un comportamiento del sistema en cada
lugar especiacutefico asiacute se puede apreciar el comportamiento del sistema seguacuten el tipo deconstruccioacuten hormigoacuten madera acero y los materiales teacutermicos utilizados para su
recubrimiento
EJERCICIO 13 (Fuzzy Control Desing Philosophy) Estos problemas se enfocaran en
el disentildeo de sistemas control Fuzzy
(a) iquestSe utiliza un modelo para el disentildeo de un sistema de control Fuzzy iquestCuaacutendo se
utiliza y queacute tipo de modelo es iquestDeberiacutea usarse un modelo iquestPor queacute iquestPor queacute no
Existen varias aplicaciones en las que no se necesita un modelo para implementar
directamente un controlador Fuzzy En esa situacioacuten no se necesita de un modelo formal
del proceso sin embargo estas aplicaciones no necesitan realmente de un controlador
debido a su estructura tan baacutesica Los modelos en siacute nos ayudan a entender el
comportamiento del sistema simular y por lo tanto a probar el controlador disentildeado De ahiacute
que es bueno el hecho de utilizar un modelo matemaacutetico en el disentildeo de un controlador
Fuzzy por lo tanto siempre es necesario un modelo si se quieren hacer bien las cosas
especialmente no se puede dejar de utilizar un modelo si se manejan aplicaciones criticas de
seguridad ya que no se podriacutean realizar la simulacioacuten y la evaluacioacuten del comportamiento
de dichos sistemas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 915
caliente en el interior de un cuarto esta corriente de aire podriacutea llegar al sensor de la
temperatura causando asiacute una perturbacioacuten Otras de las perturbaciones maacutes comunes en el
control de la temperatura de una casa podriacutean ser las corrientes de aire frio o caliente quellegan desde el exterior Otra posible perturbacioacuten seria el vapor generado en la cocina de
ahiacute que el sensor de temperatura en este tipo de sistema debe estar en lugar donde se eviten
este tipo de perturbaciones
Figura 4- Diagrama de bloques del control de temperatura en una casa [7]
En cuanto a los paraacutemetros de la planta que deben ser considerados y que podriacutean variar el
comportamiento del sistema son los motores (enfriar) o calefactores las estaciones del antildeo
Si hablamos de un mismo sistema para el control de la temperatura usado en varios lugares podriacuteamos considerar una variacioacuten en los paraacutemetros (mismo sistema pero diferentes
paraacutemetros estaacuteticos) y de esta manera verificar un comportamiento del sistema en cada
lugar especiacutefico asiacute se puede apreciar el comportamiento del sistema seguacuten el tipo deconstruccioacuten hormigoacuten madera acero y los materiales teacutermicos utilizados para su
recubrimiento
EJERCICIO 13 (Fuzzy Control Desing Philosophy) Estos problemas se enfocaran en
el disentildeo de sistemas control Fuzzy
(a) iquestSe utiliza un modelo para el disentildeo de un sistema de control Fuzzy iquestCuaacutendo se
utiliza y queacute tipo de modelo es iquestDeberiacutea usarse un modelo iquestPor queacute iquestPor queacute no
Existen varias aplicaciones en las que no se necesita un modelo para implementar
directamente un controlador Fuzzy En esa situacioacuten no se necesita de un modelo formal
del proceso sin embargo estas aplicaciones no necesitan realmente de un controlador
debido a su estructura tan baacutesica Los modelos en siacute nos ayudan a entender el
comportamiento del sistema simular y por lo tanto a probar el controlador disentildeado De ahiacute
que es bueno el hecho de utilizar un modelo matemaacutetico en el disentildeo de un controlador
Fuzzy por lo tanto siempre es necesario un modelo si se quieren hacer bien las cosas
especialmente no se puede dejar de utilizar un modelo si se manejan aplicaciones criticas de
seguridad ya que no se podriacutean realizar la simulacioacuten y la evaluacioacuten del comportamiento
de dichos sistemas
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1015
Deberiacutea usarse siempre o al menos en la mayoriacutea de los casos un modelo para el disentildeo y la
evaluacioacuten de un controlador Fuzzy ya que cumple el mismo rol que en el disentildeo de un
controlador convencional y la uacutenica diferencia es el lenguaje utilizado Es prudente el uso
de un modelo el cual nos ayuda a conocer el sistema en siacute ya se tiene la ventaja de estar
basado en los principios de la fiacutesica representados a traveacutes del modelo matemaacutetico
(b) Explique los roles de adquisicioacuten del conocimiento modelado anaacutelisis y disentildeos
anteriores de control en la construccioacuten de un controlador Fuzzy
En el disentildeo del un controlador Fuzzy debemos tener en mente cuales son los cuatro
componentes del controlador Fuzzy Reglas Bases fuzzificacioacuten defuzzificacioacuten
mecanismo de inferencia Por lo tanto estos componentes deben estar claramente
definidos
El rol de la adquisicioacuten del conocimiento se refiere a que debemos tener claros los
conceptos y reglas que rigen el sistema y los cuales deben ser definidos adecuadamente en
el componente de las Reglas Base asiacute antes que todo debemos adquirir todo el
conocimiento necesario para definir estas reglas sobre las cuales se realizara la toma de
decisiones
Como ya se ha mencionado es importante tener un modelo del sistema que prediga su
comportamiento en el caso del disentildeo de un controlador Fuzzy el modelado es uacutetil para
probar y simular el correcto desempentildeo del controlador ademaacutes que sirve para comprender
el sistema de una manera maacutes adecuada y aunque un controlador Fuzzy se basa en la
heuriacutestica no quiere decir que no se necesite un disentildeo matemaacutetico lo cual si es necesario
En cuanto a los disentildeos anteriores se debe manifestar que son importantes para el
perfeccionamiento del controlador la heuriacutestica tiene a mejorar por ello a partir de un
primer disentildeo se puede ir puliendo el comportamiento del controlador utilizando
uacutenicamente mecanismos heuriacutesticos Los controladores anteriores son una base que existe
para la construccioacuten o mejoramiento del controlador Fuzzy
(c) Que rol juega el anaacutelisis de estabilidad no lineal en el disentildeo de sistemas de control
Fuzzy
El anaacutelisis convencional de sistemas no lineales puede ser utilizado para estudiar la
estabilidad de un sistema de control Fuzzy De esta manera este tipo de anaacutelisis podriacuteaayudarnos a demostrar que el sistema cumple los criterios de estabilidad Asiacute tambieacuten este
anaacutelisis nos ayudaraacute a encontrar los problemas que podriacutea tener el controlador disentildeado en
base al conjunto de reglas establecidas que rigen la loacutegica de control Fuzzy Con este tipo
de anaacutelisis se puede demostrar por ejemplo que en el caso del control de navegacioacuten el
sistema siempre alcanza la velocidad deseada o que por ejemplo a pesar del valor de la
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1115
velocidad inicial y del tipo de terreno en el que se esteacute movilizando la velocidad actual
estaraacute siempre cerca a la velocidad deseada
EJERCICIO 14
(a) iquestPor que los ingenieros en control se deben preocupar que un sistema de control
cumpla con las especificaciones de calidad
Se necesita hacer una evaluacioacuten de calidad para probar que el sistema de control disentildeado
estaacute operando correctamente y que cumple todas las especificaciones en lazo cerrado Es
decir lo que se quiere probar es que el sistema funcione y realice correctamente sus
labores Esto es particularmente importante en aplicaciones criticas de seguridad como por
ejemplo el controlador de una planta nuclear o el controlador de un avioacuten en donde la falla
del sistema de control podriacutea involucrar la vida humana
(b) iquestCoacutemo los ingenieros estaacuten seguro de que se cumplen las especificaciones iquestExiste
una manera de estar 100 seguro de que se cumplen las especificaciones de calidad
En general existen tres maneras de verificar que un sistema de control estaacute operando
correctamente y son el anaacutelisis matemaacutetico en base al uso de modelos formales el anaacutelisis
basado en simulacioacuten que tambieacuten utiliza modelos formales y la experimentacioacuten directa
con el sistema real
En el anaacutelisis matemaacutetico permite un anaacutelisis en el cual se puede probar la estabilidad del
sistema BIBO estable estable en el sentido de Lyapunov o asintoacuteticamente estable si es o
no controlable y si cumple las especificaciones en lazo cerrado (overshoot rise time
steady-state error) Pero claramente hay algunas limitaciones dependemos de que tan bueno el modelo matemaacutetico utilizado y se tiene claro que nunca tendremos un modelo
matemaacutetico exacto Las simulaciones son una buena forma de ver el comportamiento del
sistema pero tambieacuten depende del modelo matemaacutetico y tiene por lo tanto ciertas
limitaciones Si se utiliza experimentacioacuten las limitaciones que se tienen son problemas con
la repetitividad de los experimentos y la variacioacuten de los elementos fiacutesicos De esta manera
aunque estos tres meacutetodos son necesarios y dan a conocer de una manera adecuada el
comportamiento de la planta lo cual es necesario no se puede estar completamente seguro
del comportamiento de la planta algo podriacutea eventualmente fallar pero si se pueden tomar
las precauciones para que sistema funcione correctamente la mayoriacutea del tiempo
EJERCICIO 15 (Anaacutelisis de Costo-Beneficio para los sistemas de control)
(a) Liste todos los asuntos que deben ser considerados cuando se decide cual es la
mejor opcioacuten a usar para el control de un sistema
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1215
Ademaacutes de las caracteriacutesticas teacutecnicas que debemos tomar en cuenta y las cuales tiene que
cumplir nuestro controlador se deben considerar ciertos paraacutemetros al momento de decidir
cuaacutel es mejor opcioacuten a usar en el control de un sistema Estos paraacutemetros son los siguientes
Costo- Se refiere a cuento dinero implica disentildear e implementar el controlador o el tiempo
que tomaraacute desarrollar dicho controlador
Mercado- Es necesaria la entrada de este producto al mercado se deben chequear otras
opciones disponibles ya existentes para ver si es viable la incursioacuten de un nuevo
controlador
Complejidad Computacional- La capacidad que necesitamos en procesador para
implementar el computador es decir debemos considerar la potencia y la memoria
necesaria para nuestro controlador
Fabricacioacuten- Se debe estar seguro de los componentes que se necesitan para su fabricacioacuten
o si se requiere de alguacuten componentes en especial que podriacutea causar dificultades de
conseguir o implementar debido a su complejidad
Confiabilidad- Se refiere a que tan bien funcionara el controlador chuequear cual es el
tiempo medio de fallas es decir que tan fiable es el controlador
Mantenimiento- Es necesario considerar el mantenimiento que necesita el controlador asiacute
como la calibracioacuten que debe realizar cada cierto tiempo y lo que implica su costo
Adaptabilidad- Se refiere a que el mismo disentildeo tiene la capacidad de adaptarse a otras
aplicaciones similares de esta manera el costo de disentildeo para el futuro se puede reducir
Recursos Humanos- Se debe averiguar si se cuanta el personal adecuado que entiendan y
esteacuten capacitados para lidiar con los problema que se presenten
Poliacutetica- Se debe revisar si la poliacutetica de la empresa o del gerente va con el disentildeo del
prototipo Demos ademaacutes preguntarnos si se puede vender el disentildeo a otros colegas o si el
disentildeo es tan bueno y novedoso que supera las barreras de la empresa
(b) iquestCuaacuteles de esos asuntos es el maacutes importante y por queacute En queacute situacioacuten
Ordene los asuntos en orden prioridad y justifique su orden
1- Costo El costo de disentildeo y fabricacioacuten es el factor maacutes importante ya que a pesar de la
fiabilidad y la calidad del disentildeo los recursos econoacutemicos pueden estar limitados por
diversos factores como es el capital disponible de una empresa De esta manera los
ingenieros deben disentildear tomando en cuenta que hay recursos econoacutemicos limitados y por
lo tanto se exige la optimizacioacuten de los recursos
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1315
2- Confiabilidad Una vez que se tiene claro el costo inicial se debe estar seguro que el
prototipo disentildeado funcionara bien de esta manera se evita la problemaacutetica de reemplazar
por otro controlador lo que generariacutea gastos duplicados
3- Mantenimiento Es necesario considerar el costo de mantenimiento ya es un paraacutemetro
importante debido a que se necesita el constante funcionamiento del controlador y se debeestar preparado si es que es necesario recalibrar o reparar
4- Adaptabilidad La adaptabilidad ahorra recursos al momento de querer realizar alguacuten
cambio que sea necesario
5- Poliacutetica Para que se apruebe el proyecto ademaacutes de los paraacutemetros ya mencionados
debemos estar seguro que el disentildeo va con la poliacutetica de la empresa
6- Recursos Humanos Personal Adecuado
7- Mercado Se debe revisar la posibilidad de introducir el producto al mercado lo cualresulta en ingresos por medio de las ventas y la comercializacioacuten del producto
8- Complejidad Computacional Debemos verificar la tecnologiacutea que necesitamos para la
implementacioacuten
9- Fabricacioacuten Como ya se menciono es importante estar seguro de que se cuentan con
todos los componentes que se necesitan para su fabricacioacuten e implementacioacuten
Cabe recalcar que aunque se ha planteado un orden de prioridad todos estos paraacutemetros son
importantes en el mismo nivel y deben ser considerados en conjunto para tomar la decisioacuten
final del tipo de controlador que se va a utilizar
EJERCICIO 16
(Relacioacuten con respecto a sistemas bioloacutegicos inteligentes) Se relacionan sistemas y
conceptos de control con sistemas bioloacutegicos inteligentes
(a) Un controlador Fuzzy representa muy crudamente el proceso deductivo del ser
humano iquestQueacute caracteriacutesticas del proceso deductivo del ser humano parecen ser
ignoradas iquestSon estas caracteriacutesticas importantes para la emulacioacuten del controlador
iquestCoacutemo podriacutean ser incorporadas
Al parecer un controlador Fuzzy estaacute determinado por sus reglas base las cuales guiacutean el
comportamiento del sistema pero estas reglas no pueden ser modificadas por el
controlador de ahiacute que el hecho de crear nuevas reglas es una de las caracteriacutesticas de
proceso deductivo que pareceriacutea ser ignorada y aunque hubiera una manera de cambiar las
reglas estos cambio estariacutean limitados a un cierto nivel La abstraccioacuten de ideas es una
caracteriacutestica casi uacutenica del ser humano tal vez algunos animales poseen esta habilidad
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1415
pero no es comparable con la del hombre y lo cual claramente no es parte de un
controlador Fuzzy Considerar soluciones alternativas es otra de las caracteriacutesticas que
ignora un controlador Fuzzy Aunque discernir y concluir es parte de un controlador Fuzzy
su accioacuten estaacute limitada por las reglas bases Las caracteriacutesticas mencionadas serian muy
uacutetiles si se las pudiera implementar pero este tipo de inteligencia artificial todaviacutea es un
reto para el mundo cientiacutefico tal vez con el disentildeo la loacutegica y la capacidad de
procesamiento que utilizan los procesadores evolucione se podraacuten integrar estas
caracteriacutesticas
Decimos que un sistema es estable cuando su comportamiento estaacute limitado es decir
salidas acotadas en nuestro cerebro hablar de estabilidad es maacutes complicado una persona
es estable cuando su comportamiento tambieacuten estaacute limitado pero en este caso por
imperativos sociales y los axiomas que la humanidad ha planteado de ahiacute que la
estabilidad de ahiacute la estabilidad del cerebro significa que debe comportarse y actuar
alrededor de una vecindad de comportamientos
(b) Defina el cerebro humano como un sistema dinaacutemico con entradas y salidas
(iquestCuaacuteles son) Defina controlabilidad observabilidad y estabilidad para actividad
neuroloacutegica (bioelectrical) y actividades cognitivas (ie hardware and software de
nuestro cerebro)
Se puede apreciar claramente que el cerebro es un sistema que tiene una accioacuten o respuesta
para cada sensacioacuten o entrada que percibimos de ahiacute que el cerebro humano puede ser
considerado un sistema dinaacutemico con entradas y salidas En este caso las entradas son la
informacioacuten que llegan al cerebro a traveacutes de los nervios del cuerpo humano que llevan la
informacioacuten que recibimos de los oacuterganos de los sentidos que actuacutean como sensores que perciben el comportamiento y los cambios del medio las salidas por otro lado son las
acciones que el cerebro manda a realizar a los muacutesculos y demaacutes oacuterganos de nuestro
cuerpo
El software en un ordenador son los programas que permiten realizar varias tareas o
controlar alguacuten dispositivo es decir es conocimiento al instalar software en una
computadora lo que hacernos es darle secuencias loacutegicas a la computadora para que pueda
controlar administrar o realizar alguna tarea En nuestro cerebro al igual tambieacuten
almacenamos informacioacuten y cuando aprendemos un oficio o alguna actividad es como si
estuvieacuteramos instalando un programa en nuestro cerebro Toda la loacutegica que utiliza lacomputadora estaacute basada en loacutegica booleana que a su vez se debe a los estados de voltaje
alto y bajo que gobiernan los circuitos digitales En el caso de nuestro cerebro es diferente
tambieacuten existe actividad eleacutectrica (bioloacutegica) en nuestras neuronas y ceacutelulas nerviosas pero
no se rigen uacutenicamente a estado de alto y bajo de ahiacute que nuestro razonamiento puede
llegar a mejores niveles a lo que me refiero es que nuestro hardware no es digital y no estaacute
7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt

7172019 Solution Manual Spanish (Intelligent Autonomous Control) Panos J Antsaklis and Kevin M Passino
httpslidepdfcomreaderfullsolution-manual-spanish-intelligent-autonomous-control-panos-j-antsaklis 1515
limitado a estados 0 y 1 es claramente mucho mejor de ahiacute tenemos ventaja en nuestro en
las actividades cognitivas
(c) iquestPiensas que es posible implementar inteligencia artificial en un microprocesador
actual y por lo tanto lograr control inteligente o en alguna computadora en alguacuten
tiempo en el futuro
Creo que si es posible implementar inteligencia artificial en los actuales microprocesadores
pero no en todo su espectro a lo que me refiero es que se puede tener por ahora inteligencia
artificial para ciertas actividades especificas lo cual ya demanda de una gran capacidad en
el procesador es decir una frecuencia de reloj muy grande y el poder procesar las sentildeales
con un gran nuacutemero de bits De ahiacute que no me refiero a una inteligencia artificial completa
aunque creo que en el futuro se podriacutea tener una mejor tecnologiacutea con la cual se podriacutean
construir procesadores maacutes eficaces que permitan el manejo de la inteligencia artificial con
lo cual se lograriacutea a su vez el control inteligente que es una caracteriacutestica de la heuriacutestica
del ser humano
BIBLIOGRAFIA
[1] Passino K Yurkovich S Fuzzy Control Addison-Wesley 1998 Menlo Park CA
1998
[2] K Ogata Ingenieriacutea de Control Moderno 4th edition Prentice Hall Espantildea Madrid
2007
[3] Controlabilidad Wikipedia 03092012 lthttpeswikipediaorgwikiControlabilidadgt
[4] Observability Wikipedia 03092012 lt httpenwikipediaorgwikiObservabilitygt
[5] Karl Johan Astrom Simple Control System Cruise Control COP 2002
[6] Aircraft Engineering and Aerospace Technology 03092012
lthttpwwwemeraldinsightcomjournalshtmarticleid=1776113ampshow=htmlgt
[7] Tutorial Microchip lt httpwwwpagesdrexeledu~cy56PIChtm gt