Embed Size (px)
DESCRIPTION
ece2011 at monash universitysignal processing firstlecture notesif you are studying at monash uni electrical engineering than this will help
Citation preview
Copyright © Monash University 2009
Signal
Processing
First
Lecture 10
FIR Filtering Introduction
1
Copyright © Monash University 2009
READING ASSIGNMENTS
• This Lecture:
– Chapter 5, Sects. 5-1, 5-2 and 5-3 (partial)
• Other Reading:
– Recitation: Ch. 5, Sects 5-4, 5-6, 5-7 and 5-8
• CONVOLUTION
– Next Lecture: Ch 5, Sects. 5-3, 5-5 and 5-6
2
Copyright © Monash University 2009
LECTURE OBJECTIVES
• INTRODUCE FILTERING IDEA
– Weighted Average
– Running Average
• FINITE IMPULSE RESPONSE FILTERS
–FIR Filters
– Show how to compute the output y[n] from the input signal, x[n]
3
Copyright © Monash University 2009
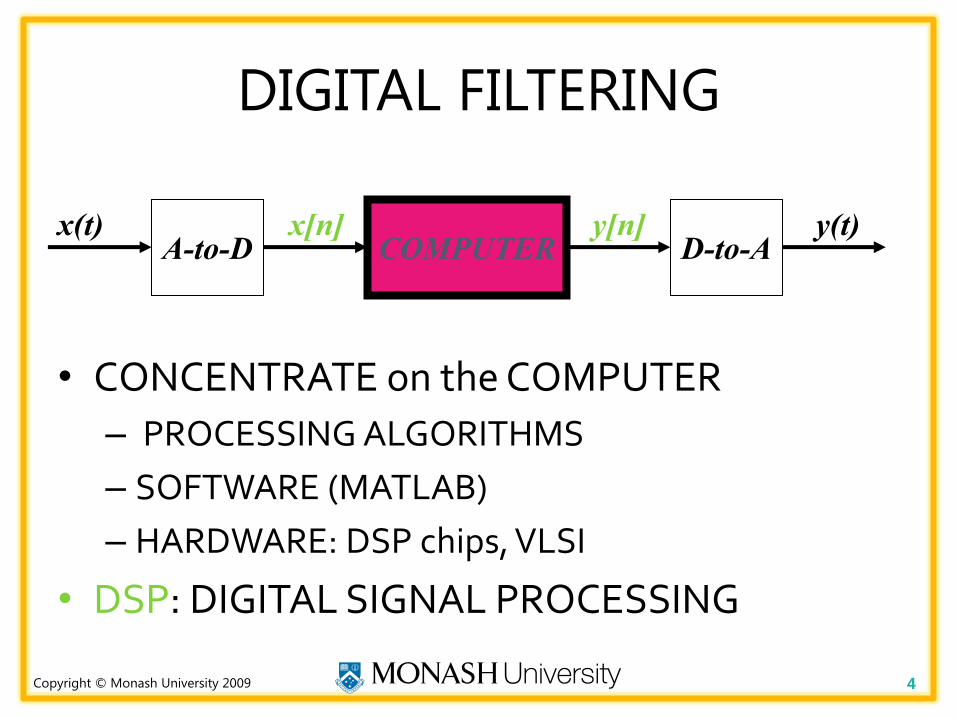
DIGITAL FILTERING
• CONCENTRATE on the COMPUTER
– PROCESSING ALGORITHMS
– SOFTWARE (MATLAB)
– HARDWARE: DSP chips, VLSI
• DSP: DIGITAL SIGNAL PROCESSING
4
COMPUTER D-to-A A-to-D x(t) y(t) y[n] x[n]

Copyright © Monash University 2009
The TMS32010, 1983
5
First PC plug-in board from Atlanta Signal Processors Inc.

Copyright © Monash University 2009
Rockland Digital Filter, 1971
6
For the price of a small house, you could have one of these.
Copyright © Monash University 2009
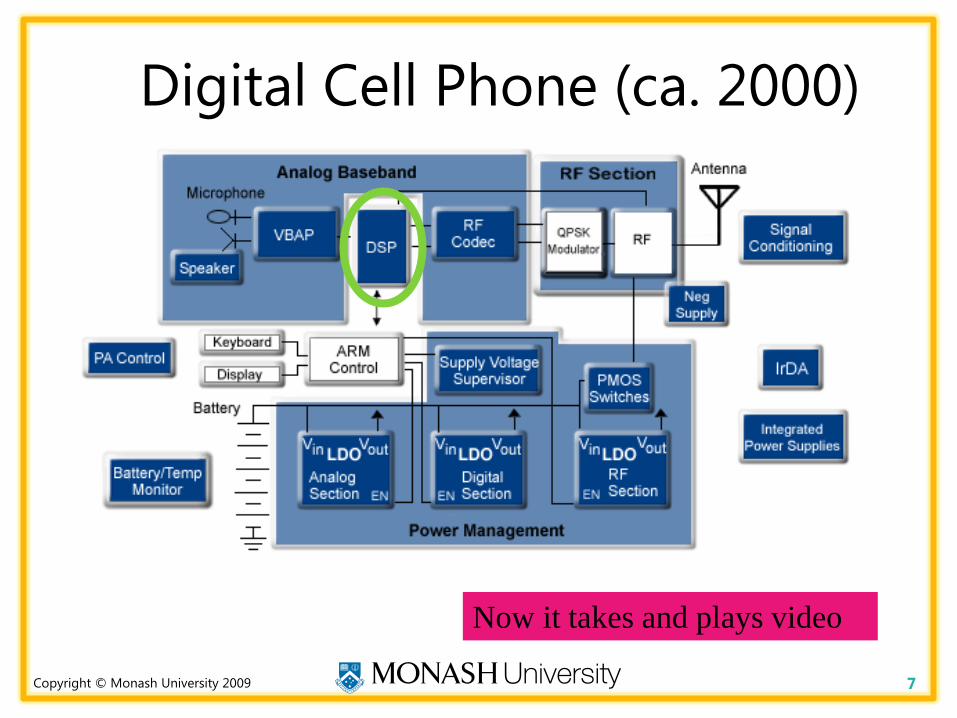
Digital Cell Phone (ca. 2000)
7
Now it takes and plays video
Copyright © Monash University 2009
DISCRETE-TIME SYSTEM
• OPERATE on x[n] to get y[n]
• WANT a GENERAL CLASS of SYSTEMS
– ANALYZE the SYSTEM
• TOOLS: TIME-DOMAIN & FREQUENCY-DOMAIN
– SYNTHESIZE the SYSTEM
8
COMPUTER y[n] x[n]
Copyright © Monash University 2009
D-T SYSTEM EXAMPLES
• EXAMPLES:
– POINTWISE OPERATORS
• SQUARING: y[n] = (x[n])2
– RUNNING AVERAGE
• RULE: Eg “the output at time n is the average of three consecutive input values”
9
SYSTEM y[n] x[n]
Copyright © Monash University 2009
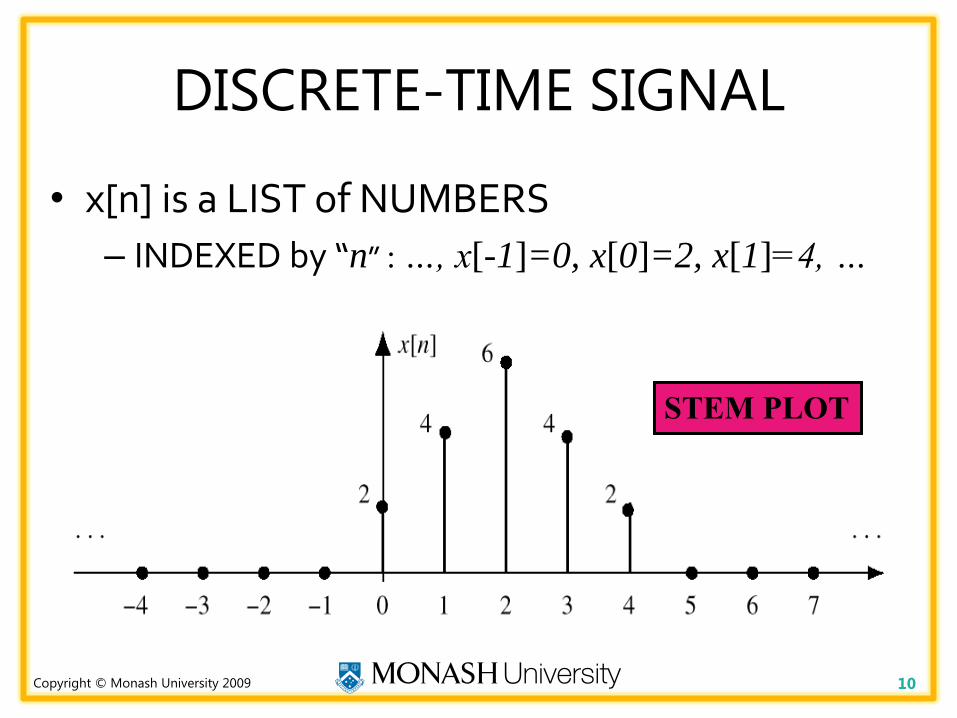
DISCRETE-TIME SIGNAL
• x[n] is a LIST of NUMBERS
– INDEXED by “n” : …, x[-1]=0, x[0]=2, x[1]=4, …
10
STEM PLOT

Copyright © Monash University 2009
SIMPLEST FILTER -3-PT AVERAGE • ADD 3 CONSECUTIVE NUMBERS
– Do this for each “n”
3/19/2015 11
Make a TABLE
n=0
n=1
])2[]1[][(][31 nxnxnxny

Copyright © Monash University 2009
3/19/2015
12
INPUT SIGNAL
OUTPUT SIGNAL
])2[]1[][(][31 nxnxnxny
Copyright © Monash University 2009
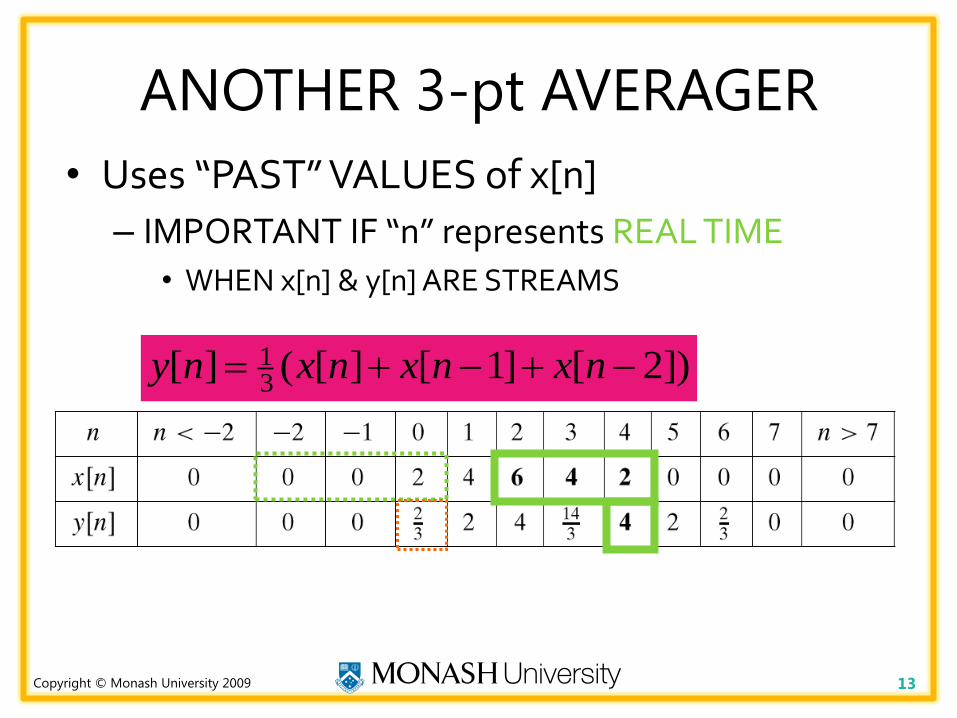
ANOTHER 3-pt AVERAGER
• Uses “PAST” VALUES of x[n]
– IMPORTANT IF “n” represents REAL TIME
• WHEN x[n] & y[n] ARE STREAMS
13
])2[]1[][(][31 nxnxnxny

Copyright © Monash University 2009
PAST, PRESENT, FUTURE
3/19/2015 14
“n” is TIME
Causal filtering
Noncausal filtering

Copyright © Monash University 2009
GENERAL FIR FILTER
• FILTER COEFFICIENTS {bk}
– DEFINE THE FILTER
– For example,
15
M
k
k knxbny0
][][
]3[]2[2]1[][3
][][3
0
nxnxnxnx
knxbnyk
k
}1,2,1,3{ kb

Copyright © Monash University 2009
GENERAL FIR FILTER
• FILTER COEFFICIENTS {bk}
• FILTER ORDER is M
• FILTER LENGTH is L = M+1
– NUMBER of FILTER COEFFS is L
16
M
k
k knxbny0
][][

Copyright © Monash University 2009
GENERAL FIR FILTER
• SLIDE a WINDOW across x[n]
17
x[n] x[n-M]
M
k
k knxbny0
][][
Copyright © Monash University 2009
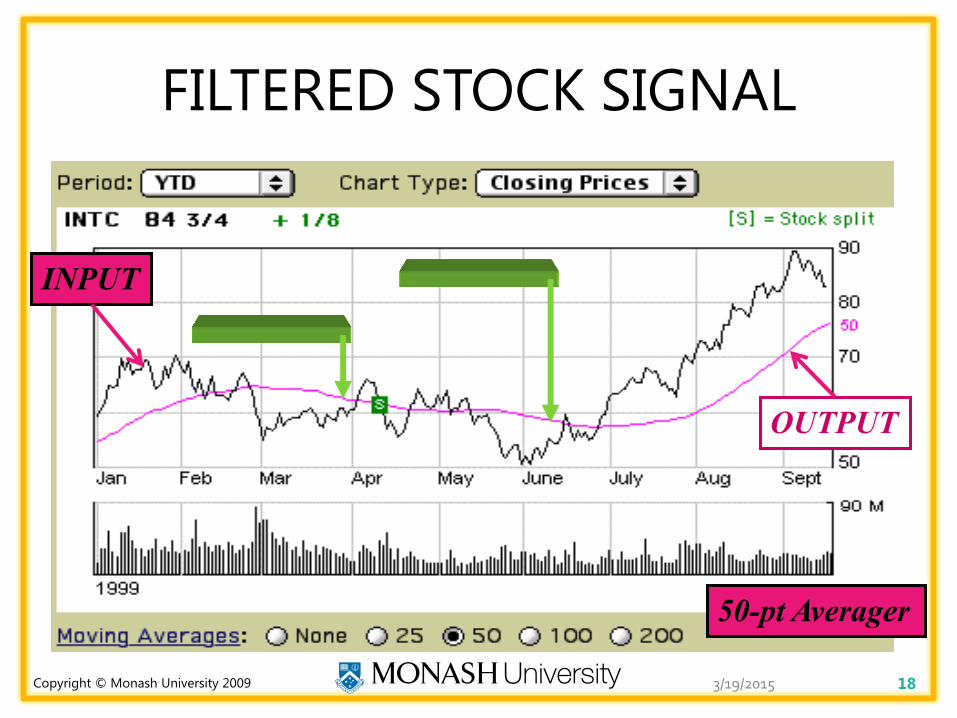
FILTERED STOCK SIGNAL
3/19/2015 18
OUTPUT
INPUT
50-pt Averager

Copyright © Monash University 2009
SPECIAL INPUT SIGNALS
• x[n] = SINUSOID
• x[n] has only one NON-ZERO VALUE
19
00
01][
n
nn
1
n
UNIT-IMPULSE
FREQUENCY RESPONSE (LATER)

Copyright © Monash University 2009
SHIFTED UNIT IMPULSE [n-i]
3/19/2015
20
[n-i] is NON-ZERO
Only when n-i = 0 !!!
]3[ n 3n

Copyright © Monash University 2009
MATH FORMULA for x[n]
• Use SHIFTED IMPULSES to write x[n]
3/19/2015 21
]4[2]3[4]2[6]1[4][2][ nnnnnnx
NOTE: {[n-k]}
for - < k < is an
orthonormal basis
for D-T signals
[ ] [ ] [ ]k
x n x k n k

Copyright © Monash University 2009
General formula for x[n]
• Use SHIFTED IMPULSES to write x[n]
3/19/2015 22
NOTE:
k[n] = [n-k] for - < k <
is an orthonormal basis for
Discrete-Time signals
[ ] [ ] [ ] [ ] [ ]k
k k
x n x k n k x k n

Copyright © Monash University 2009
UNIT STEP SIGNAL
24
00
01][
n
nnu
[ ]
[ ] [ 1]
n
u n u n
u[n]
u[n-1]
[n]

Copyright © Monash University 2009
4-pt averager with [n] input
• CAUSAL SYSTEM: USE PAST VALUES
25
])3[]2[]1[][(][41 nxnxnxnxny
INPUT = UNIT IMPULSE SIGNAL = [n]
]3[]2[]1[][][
][][
41
41
41
41
nnnnny
nnx
OUTPUT is called “IMPULSE RESPONSE”
},0,0,,,,,0,0,{][41
41
41
41 nh
Copyright © Monash University 2009
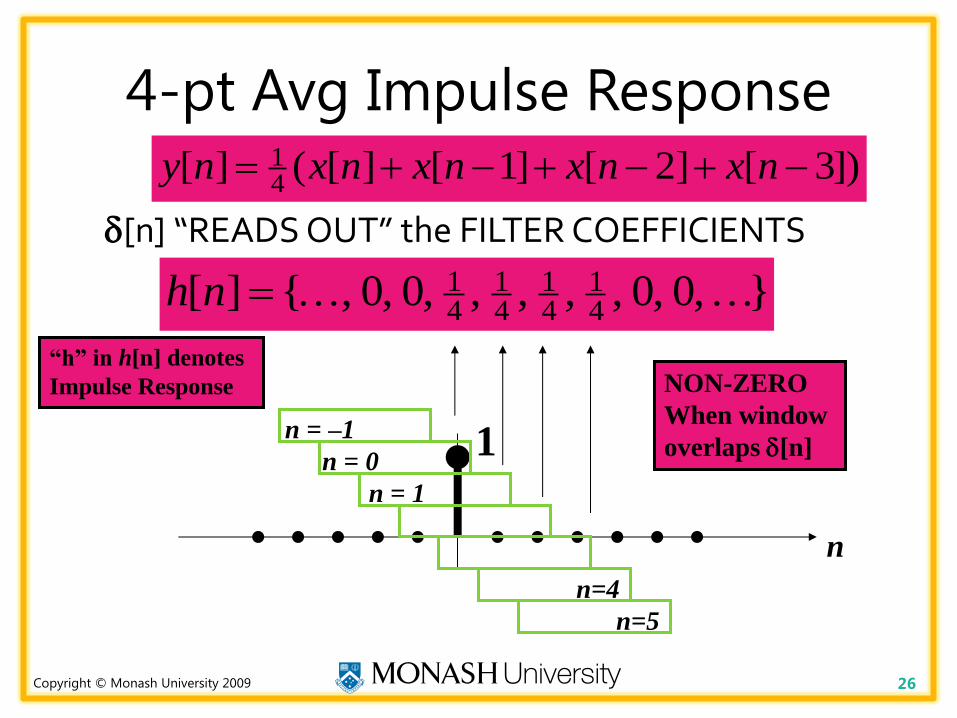
4-pt Avg Impulse Response
[n] “READS OUT” the FILTER COEFFICIENTS
26
},0,0,,,,,0,0,{][41
41
41
41 nh
“h” in h[n] denotes
Impulse Response
1
n
n = 0
n=4
n=5
n = –1
NON-ZERO
When window
overlaps [n]
])3[]2[]1[][(][41 nxnxnxnxny
n = 1

Copyright © Monash University 2009
FIR IMPULSE RESPONSE
• Convolution = Filter Definition
– Filter Coeffs = Impulse Response
3/19/2015 27
M
k
knxkhny0
][][][
CONVOLUTION
M
k
k knxbny0
][][
Copyright © Monash University 2009
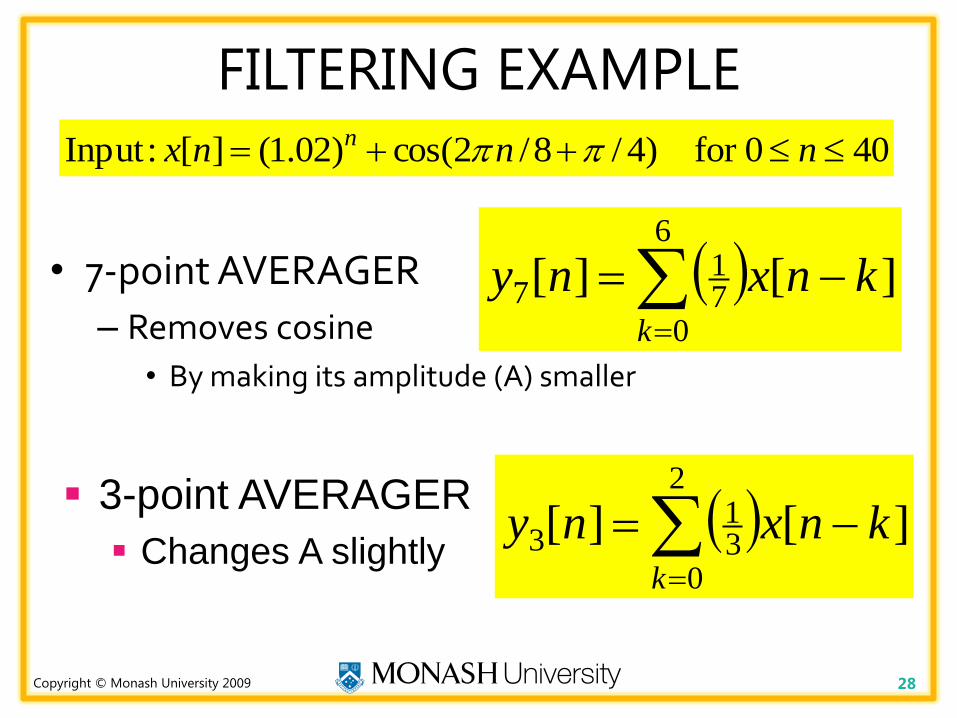
FILTERING EXAMPLE
• 7-point AVERAGER
– Removes cosine
• By making its amplitude (A) smaller
28
3-point AVERAGER
Changes A slightly
6
071
7 ][][k
knxny
2
031
3 ][][k
knxny
400for)4/8/2cos()02.1(][ :Input nnnx n

Copyright © Monash University 2009
3-pt AVG EXAMPLE
3/19/2015 29
USE 3 PAST VALUES
Phase shift





























