Embed Size (px)
Citation preview

Università degli Studi della BasilicataFacoltà di Ingegneria - Facoltà di Architettura, Mater a
Tecniche e metodi, anche innovativi, per lo studio e il monitoraggio dell'instabilità dei versanti
Matera, 11 Dicembre 2009
Francesco SdaoFacoltà di Ingegneria, UNIBAS

Argomenti
1. Fasi, obiettivi e finalità del monitoraggio di un corpo di frana;
2. principali tecniche di monitoraggio dell’instabilità dei versanti spostamenti;
3. casi di studio:
• I movimenti di blocchi nel centro storico di Maratea;
• i dissesti e i crolli delle miniere di Hogart e di Chuquicamata
• I dissesti in aree di elevato valore culturale: le chiese rupestri di Matera;
• La grande frana di Ancona del 13 dicembre 1982

Chiesa rupestre – Iazzo dell’Ofra (Matera)
Satriano di Lucania
FRANE E PATRIMONIO STORICO-CULTURALE

MachuPicchu
Santuario La Verna
Tempio di Hatshepsut (Egitto)
FRANE E PATRIMONIO STORICO-CULTURALE

RILIEVI ED INDAGINI
(dirette o indirette;puntuali e/o areali)
ANALISI(elaborazione modelli)
INTERVENTI DI CONSOLIDAMENTO
MONITORAGGIO MOVIMENTO DI
MASSA
CONTROLLO EFFICIENZA INTERVENTI
Fasi di studio e di monitoraggio di un movimento di massa

Obiettivi del monitoraggio di un corpo di frana
1. caratterizzazione geometrica (estensione, volume) e geomorfologica del corpo di frana (localizzazione e riconoscimento della forma e della tipologia della o delle superfici di rottura);
2. valutazione delle pressioni interstiziali e loro variazione spazio-temporale;
3. definizione dei caratteri di attività del corpo di frana (grado, stile e distribuzione di attività);
4. misura e controllo degli spostamenti superficiali e interni all’ammasso dislocato;
5. individuazione delle correlazioni fra spostamenti misurati e principali cause di instabilità (piogge, sismi, azioni antropiche, ecc.);
6. individuazioni di eventuali soglie di allarme ai fini della salvaguardia di uomini e cose;
7. controllo dell’efficacia di interventi di consolidamento, sia in corso d’opera che successivamente alla loro realizzazione.

Tipi di strumentazione e architettura del piano di monitoraggio
Il tipo di strumentazione e l’architettura del piano di controllo dipendono da alcuni fattori:
1. tipologia di frana e sua evoluzione spazio-temporale;
2. materiale coinvolto (roccia, roccia tenera, roccia sciolta) e caratteri di fessurazione;
3. estensione e volume dell’ammasso dislocato;
4. caratteri di velocità ed evoluzione cinematica spazio-temporale;
5. finalità dello studio

Tipi di strumenti per il monitoraggio meccanico di un corpo di frana

Sistema integrato di monitoraggio. La frana di Ruinion

Tipi di misure di spostamento in superficie
Misure fotogrammetriche:• Fotogrammetria aerea;• Fotogrammetria terrestre;
Misure topografiche:• Livellazioni, triangolazioni, trilaterazioni, distanziometriche.
Misure di Remote Sensing:• Global Position System (GPS): modalità statica e cinematica• Interferometria SAR satellitare o con sensori basati a terra ( LISA,
JRC ISPRA);• Permanent Scatterers
Misure su fratture e piani di discontinuità:• Estensimetri;• Clinometri;• Fessurimetri

Tipi di misure di spostamento in superficie
Comparazione di DEM multitemporali:
•GPS cinematico;
•Laser scanner da terra o aereo;
•Fotogrammetria digitale.

Tecniche di monitoraggio GPSL’acronimo NAVSTARGPS corrisponde alla denominazione:
NAVigation System with Timing And Ranging Global Positioning System
• E’ un sistema di posizionamento costituito da una costellazione di satelliti che emettono incessantemente dei segnali elettromagnetici che possono essere captati e memorizzati da speciali ricevitori a terra e che permettono, mediante sofisticate elaborazioni, di determinare con elevata precisione la posizione occupata dai ricevitori.
E’ un orologio
A cosa serve ?
“L’utilizzo del GPS permette di assegnare un indirizzo univoco ad ogni metro quadro del Pianeta”
Definizione del GPS:• E’ un sistema di posizionamento globale, cioè un sistema che utilizzando misure di tempo e note le orbite dei satelliti cui queste misure si riferiscono permette di ottenere la posizione di un punto su qualunque posto della superficie terrestre

Costellazione GPS24 Satelliti disposti su 6 piani orbitali4 Satelliti su ogni pianoOrbita a 20200 Km, 55 Gradi di inclinazione
Il satellite La costellazione GPS


Global Positioning SystePer ricavare la posizione di un punto in assoluto è necessario osservare simultaneamente almeno quattro satelliti per stimare iquattro parametri fondamentali: le coordinate (X,Y,Z) ed il tempo (T)

Componenti del GDOP:
PDOP = Position Dilution of Precision (3-D)
HDOP = Horizontal Dilution of Precision(Latitudine, Longitudine ).
VDOP = Vertical Dilution of Precision (Altezza).
TDOP = Time Dilution of Precision (Tempo). GDOP OTTIMALE
GDOP PESSIMO
GDOP BUONO MA PRESENZA DI OSTRUZIONI

17
Posizionamento Differenziale o DGPS
� Si determina la posizione di un punto rispetto a un altro punto considerato noto.
� Occorrono almeno 2 ricevitori GPS posizionati sui due estremi della base, che effettuino osservazioni contemporanee ai medesimi satelliti per l’intera durata della sessione di misura (decine di minuti – ore).
� Si determina il valore della baseline.

La determinazione di una posizione con il sistema GPS può essereeffettuta o su punti singoli (posizionamento assoluto) mediante l’utilizzo di un solo ricevitore o utilizzando contemporaneamente due (o più) ricevitori (tecnica DGPS, GPS Differenziale)
La tecnica utilizzata nella maggior parte delle applicazioni geo-topografiche è la tecnica DGPS o del posizionamento relativo.
Le procedure operative nella tecnica DGPS sono divisibili secondo lo schema:
•procedure di rilievo statico:
- rilievo statico
- rilievo statico rapido
•procedure di rilievo cinematico:
- rilievo stop and go
- rilievo cinematico continuo/RTK
Metodologie di esecuzione di rilievi GPS

Elementi salienti del metodo statico:
� 2 ricevitori sugli estremi delle baseline (30 min -qualche ora)
� almeno 4 satelliti e non perdere il contatto con essi durante la sessione
� intervallo di campionamento: 5 s per statico rapido a 30 s per rilievi statici di diverse ore
Rilievo Statico e Statico-Rapido
MASSIMA PRECISIONE DEI RISULTATI 10-6D - 10-7D
Il metodo è detto statico-rapido se si diminuiscono i tempi di acquisizione a fronte di una minore accuratezza.
Dmax = 15 -20 km

Rilievo Cinematico
•GPS cinematico propriamente detto: consiste nel tenere fisso uno dei due ricevitori (base) e nel trasportare il secondo (rover) lungo un percorso da determinare.•PRECISIONE: ± 1-5 cm + 1-5 mm/Km.
Metodo stop and go: i punti da determinare vengono occupati successivamente dal rover tenendolo fermo per un certo tempo.
Nel Real Time Kinematic la determinazione della posizione di ciascun punto rilevato viene effettuata direttamente in campagna in tempo reale.

MATERA
Belvedere delle Chiese Rupestri
Complesso monastico di San Nicola all’ Ofra
Parco Archeologico Storico Naturale delle Chiese Rupestri del Materano

Parco Archeologico Storico Naturale delle Chiese Rupestri del Materano
Gravina e Chiesa Rupestre di Madonna degli Angeli e altre testimonianze rupestri (VIII – XIII sec. D.C)

Gravina e Chiesa Rupestre di Madonna degli Angeli e altre testimonianze rupestri (VIII – XIII sec. D.C)

• Indagini multidisciplinari compiute:
1. rilievi geologici e geomorfologici di campagna
2. analisi di foto aeree di diversa epoca e scala integrati da indagini geofisiche
3. analisi dello stato di fratturazione4. analisi cinematica delle condizioni
di instabilità mediante il Metodo di Matheson (1983,1989) rivisitato da Hudson e Harrison (1993)
Carta geomorfologica e geostrutturale
Parco Archeologico Storico Naturale delle Chiese Rupestri del Materano

Spiccata instabilità dei versanti che si manifesta mediante crolli, ribaltamenti e scivolamenti di blocchi rocciosi.
Complesso monastico di San Nicola all’ Ofra
Blocchi rocciosi Blocchi rocciosi calcareniticicalcareniticiin evidente condizione di in evidente condizione di potenziale instabilitpotenziale instabilitàà
Parco Archeologico Storico Naturale delle Chiese Rupestri del Materano

Rete di Monitoraggio
•Realizzazione di un piano di monitoraggio per il controllo degli spostamenti e dell’evoluzione morfodinamica dei movimenti di massa individuati nei siti investigati.
Tecniche topografiche tradizionali, rilievi GPS e misure di basideformometriche.
RETE di MONITORAGGIO:
10 punti di controllo (markers a centramento forzato )
•2 CAPISALDI
•8 sui blocchi potenzialmente INSTABILI

Rete di Monitoraggio
� Campagna di misure: Luglio 2002 –Novembre 2003
� 11 campagne di misura GPS e 5 di rilievi topografici
� VALORI SOGLIA DI SPOSTAMENTO
� 0,5 cm per le componenti planari
� 1,0 cm per le componenti verticaliCAPISALDI
Molte stazioni di misura hanno subito spostamenti al di sopra dei valori soglia.
L’intera area investigata mostra una lenta ma continua attività, con spostamenti variabili da qualche mm/anno a qualche cm/anno; gli spostamenti e le deformazioni subiscono un rapido incremento che genera la rottura dei blocchi.

Delta Nord w.r.t. Staz.01
-0,015
-0,010
-0,005
0,000
0,005
0,010
0,015
01/09/2002
21/10/2002
10/12/2002
29/01/2003
20/03/2003
09/05/2003
28/06/2003
17/08/2003
06/10/2003
25/11/2003
14/01/2004
Date
met
ers
Staz. 02
Staz. 03
Staz. 04
Staz. 05
Staz. 06
Staz. 07
Staz. 08
Staz. 09
Delta Nord w.r.t. Staz.10
-0,015
-0,010
-0,005
0,000
0,005
0,010
0,015
01/09/2002
21/10/2002
10/12/2002
29/01/2003
20/03/2003
09/05/2003
28/06/2003
17/08/2003
06/10/2003
25/11/2003
14/01/2004
Date
met
ers
Staz. 02
Staz. 03
Staz. 04
Staz. 05
Staz. 06
Staz. 07
Staz. 08
Staz. 09
Delta East w.r.t. Staz.01
-0,015
-0,010
-0,005
0,000
0,005
0,010
01/09/2002
21/10/2002
10/12/2002
29/01/2003
20/03/2003
09/05/2003
28/06/2003
17/08/2003
06/10/2003
25/11/2003
14/01/2004Date
met
ers
Staz. 02
Staz. 03Staz. 04
Staz. 05
Staz. 06
Staz. 07
Staz. 08
Staz. 09
Delta East w.r.t. Staz.10
-0,010
-0,005
0,000
0,005
0,010
01/09/2002
21/10/2002
10/12/2002
29/01/2003
20/03/2003
09/05/2003
28/06/2003
17/08/2003
06/10/2003
25/11/2003
14/01/2004Date
met
ers
Staz. 02
Staz. 03
Staz. 04
Staz. 05
Staz. 06
Staz. 07
Staz. 08
Staz. 09
Delta East w.r.t. Staz.10
-0,010
-0,005
0,000
0,005
0,010
01/09/2002
21/10/2002
10/12/2002
29/01/2003
20/03/2003
09/05/2003
28/06/2003
17/08/2003
06/10/2003
25/11/2003
14/01/2004Date
met
ers
Staz. 02
Staz. 03
Staz. 04
Staz. 05
Staz. 06
Staz. 07
Staz. 08
Staz. 09
Risultati delle misura GPS condotte dal 2003 al 2004

Permanent ScatterersTecnicheTecniche InteferometricheInteferometriche
Identificazione e analisi della risposta di fase di riflettori naturali stabili, detti Scatteratori Permanenti (PS), impiegati come una sorta di “rete geodetica naturale”
Ovunque siano presenti bersagli stabili (PS), è possibile:
• Stimare la velocità media di spostamento [mm/anno]
• Ricostruire l’intera serie storica degli spostamenti

I radar satellitari misurano distanze
I radar satellitari misurano distanze
R
Superficie terrestre
RadarRadarRadarRadar
RRRR Light. Vel.
Time x=
SegnaleSegnaleSegnaleSegnaleemesso/ricevutoemesso/ricevutoemesso/ricevutoemesso/ricevuto

Individuazione dei Permanent ScatterersIndividuazione dei Permanent Scatterers
Bersagli radar Bersagli radar Bersagli radar Bersagli radar ““““costanticostanticostanticostanti”””” nel tempo:nel tempo:nel tempo:nel tempo:
edifici, monumenti, viadotti, antenne, pali, condotte, rocce esposte...
per i quali si misurano le deformazioni in corso a partire dal 1992 (dati ESA-ERS)


R1R2
∆R
Permanent Scatterer
soggetto a moto tra la 1a e la 2a
acquisizione
1111a a a a acquisizioneacquisizioneacquisizioneacquisizione
2222aaaa acquisizioneacquisizioneacquisizioneacquisizione
∆t = 35 t = 35 t = 35 t = 35 gggggggg (ERS)(ERS)(ERS)(ERS)
Misura della deformazione
[mm/anno]
Elaborazione multi-immagine per ricostruire la storia delle deformazioni del PS
Elaborazione multi-immagine per ricostruire la storia delle deformazioni del PS

La frana di Triesenberg(Liechtenstein)
La frana di Triesenberg(Liechtenstein)
ESA - MUSCL project
-7[mm/yr]
7
Corpo Corpo Corpo Corpo in franain franain franain frana
Individuazione di oltre 450 PS nellIndividuazione di oltre 450 PS nellIndividuazione di oltre 450 PS nellIndividuazione di oltre 450 PS nell’’’’area in scivolamentoarea in scivolamentoarea in scivolamentoarea in scivolamento

Deformazioni di un singolo edificio
Deformazioni di un singolo edificio
Serie storica di deformazionePeriodo: 1992 - 2000

Sono essenzialmente utilizzati in problemi di instabilità di fronti rocciosi. Essi permettono di misurare e di controllare sia l’apertura di superfici di discontinuità che l’eventuale scorrimento di blocchi rocciosi
Quando la distanza tra i due punti di ancoraggio è dell’ordine di 1-3 m si utilizzano gli estensimetri a barra. Quando la distanza è maggiore (5-50 m) si utilizzano gli estensimetri a filo.
Estensimetri
Estensimetro a barra
Estensimetri a filo.

Estensimetri a barra
monodirezionale bidirezionale
tridirezionale

Estensimetri a filo
Estensimetri a filo in serie

Le grandi frane di Machu Picchu, Cusco (Perù)

Schema geomorfologico
Sezione geomorfologica B1 – B3

Schema del piano di monitoraggio di Machu Picchu con estensimetri a filo in serie.

Alcuni risultati del monitoraggio

Monitoraggio di fronti instabili (scavi a cielo aperto, miniere, trincee)

Sistema di monitoraggio integrato spostamenti – pressioni interstiziali
Frequenza dei controlli per coltivazioni a cielo aperto

Miniera di Chuquicamata (Cile)
Sarebbe bene non venisse dimenticata le lezione che insegnano i cimiteri delle miniere, pur tenendo conto che rappresentano solo una piccola parte della smisurata quantità di persone divorate dalle frane, dalla silicosi e dal clima infernale della montagna. Ernesto Che Guevara
fronte instabile

Miniera di Chuquicamata (Cile)
Fronte instabile nella miniera di Chuquicamata
Miniera cuprifera.
Materiale roccioso: rocce ignee molto fessurate (4 diversi sistemi di fessurazione con formazione di cunei rocciosi).
Fronte instabile : 200 m di altezza; volume mobilitato: 14 Mm3
Superficie di collasso: poco inclinata, con resistenza mobilitata φ = 20-25°

Sistema di monitoraggio Spostamenti misurati in un banco di coltivazione
Esecuzione di scavi
Volate di esplosivo
Misure di emissione acustica
0,2 – 0,5 m/giorno

Miniera di HogartRoccia: Diorite molto fessurata
Fronte instabile: altezza 90 m, lunghezza ca. 200 m
Volume di materiale instabile ca. 200.000 mc
Processi di dissesto: ribaltamenti e crolli di blocchi con spostamenti piùaccentuati in cresta.
Profilo attraverso la zona instabile

Fine coltivazione: Marzo 1975
Collasso totale Maggio 1975
sistema di monitoraggio:
osservazione diretta continua;
20 estensimetri a filo a cavallo delle principali fessure.
13 caposaldi uniformemente distribuiti nell’area instabile controllati in continuo con elettrodistanziometri.
Sismografi per osservazioni di emissioni acustiche
soglia di allarme fissata: 13 mm/giorno
Collasso del fronte

Monitoraggio degli spostamenti e delle deformazioni negli ammassi instabili
1. inclinometri a sonda2. inclinometri fissi3. estensimetri in foro4. sonde estensoinclinometriche5. livellazioni in cunicoli suborizzontali6. pendoli rovesci
Gli spostamenti e le deformazioni all’interno degli ammassi instabili possono essere evidenziati ricorrendo a misure con :

Inclinometri a sonda
Gli inclinometri a sonda misurano, mediante una sonda mobile all’interno di una tubazione installata in un foro di sondaggio verticale, le variazioni dell’inclinazione del tubo provocata dalle deformazioni del terreno. Il sensore della sonda è un servoaccelerometro con una sensibilità tipica di 10-5 rad (0.01 mm/m).
Tali strumenti consentono di misurare l’entità, la direzione e il verso di spostamento dell’ammasso instabile.

Inclinometri a sonda
Tubi inclinometrici
Modalità di installazione degli inclinometri a sonda:
1. La base dell’inclinometro va attestata nel substrato stabile;
2. Il tubo inclinometrico va reso solidale con il terreno e non deve venire a contatto con acque sotterranee;
3. Il tubo, dopo l’installazione, deve essere verticale.

Risultati dei rilievi inclinometrici.
I rilievi inclinometrici consentono di costruire:1. le deformate inclinometriche puntuali 2. il diagramma polare (spostamento totale – azimut)3. la deformata cumulata (spostamento totale).
Deformata puntuale
Diagramma polare (spostamento totale – azimut)
N 300°
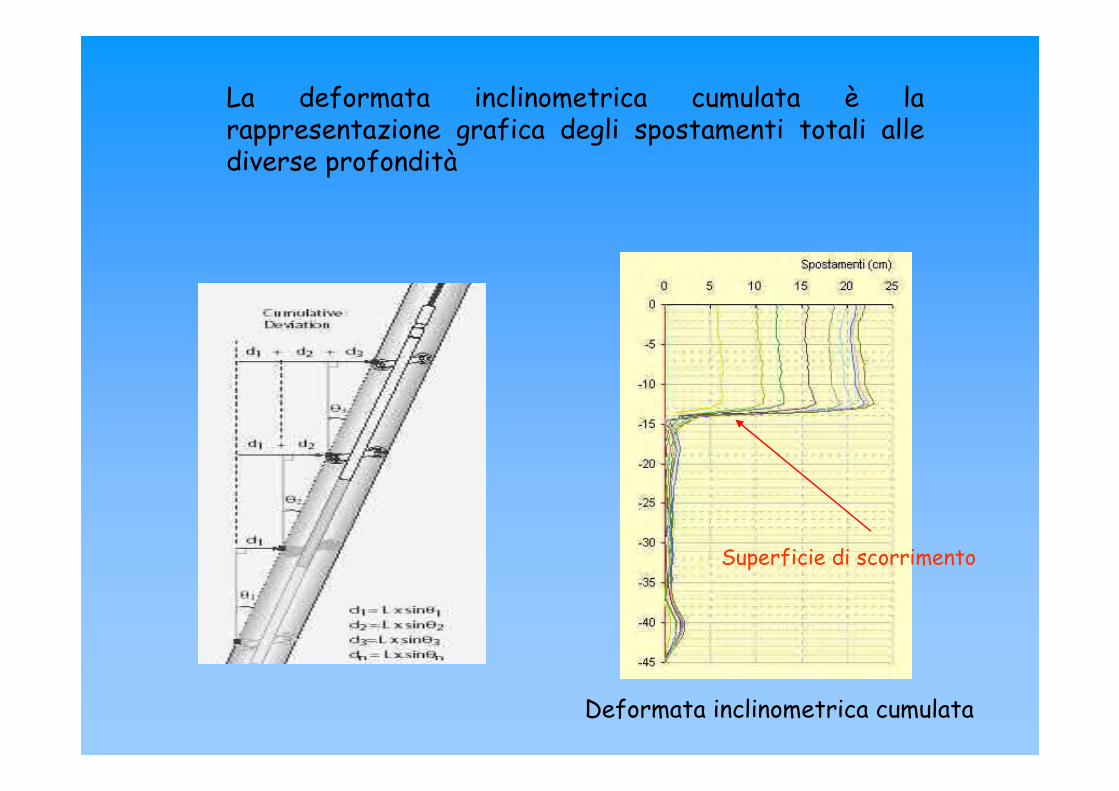
La deformata inclinometrica cumulata è la rappresentazione grafica degli spostamenti totali alle diverse profondità
Deformata inclinometrica cumulata
Superficie di scorrimento
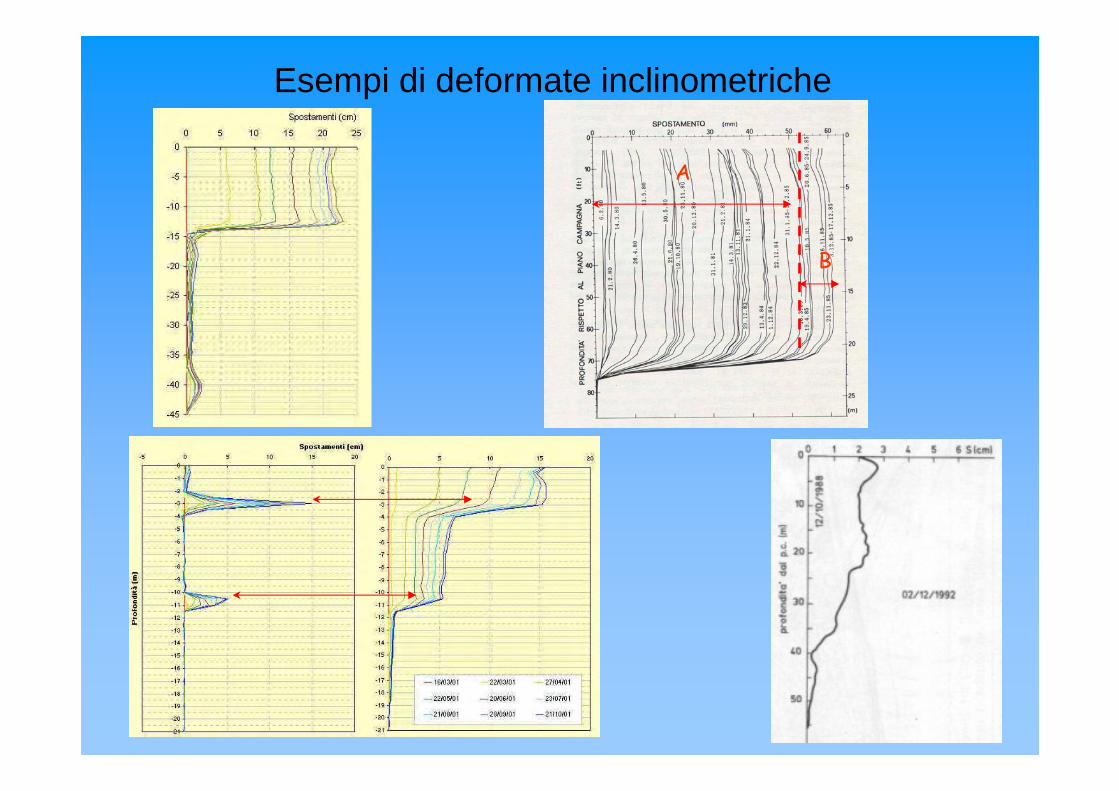
Esempi di deformate inclinometriche
A
B

Inclinometri fissiBatteria di inclinometri posti a diverse profondità. In questo caso la sonda o il sensore sono cementati al foro in o piùuna posizioni predeterminate.
Negli inclinometri fissi è possibile eseguire misure finché non si verificano interruzioni dei cavi di collegamento.

La grande frana di Ancona del 13 dicembre 1982

La grande frana di Ancona del 13 dicembre 1982


La grande frana di Ancona

Epilogo
Vi sono in cielo e in terra, Orazio, assai più frane di quante ne sogna la tua filosofia…… (Amleto I. v., Shakespeare)