Embed Size (px)
Citation preview

Investeşte în oameni!
FONDUL SOCIAL EUROPEAN
Programul Operaţional Sectorial Dezvoltarea Resurselor Umane 2007 – 2013
Axa prioritară 1 „Educaţie şi formare profesională în sprijinul creşterii economice şi dezvoltării societăţii bazate
pe cunoaştere”
Domeniul major de intervenţie 1.5. „Programe doctorale şi post-doctorale în sprijinul cercetării”
Titlul proiectului: Burse doctorale si postdoctorale pentru cercetare de excelenta
Numărul de identificare al contractului: POSDRU/159/1.5/S/134378
Beneficiar: Universitatea Transilvania din Braşov
UNIVERSITATEA „TRANSILVANIA” DIN BRAŞOV
DEPARTAMENT DIDACTIC : DESIGN DE PRODUS, MECATRONICĂ ŞI MEDIU
Asist. ing. Radu ȚÂRULESCU
CONTRIBUŢII PRIVIND OPTIMIZAREA
CONFIGURAŢIEI SENZORILOR UTILIZAŢI
LA ROBOŢII MOBILI
CONTRIBUTIONS TO THE OPTIMIZATION OF
SENSORS USED ON MOBILE ROBOTS
Conducător de doctorat: Prof.univ.dr.ing. Ciprian Iustin OLTEANU
Brașov 2014

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
1
MINISTERUL EDUCAȚIEI NAȚIONALE
Universitatea TRANSILVANIA din Braşov Bd Eroilor 29, 500036 Braşov, România, Tel/Fax: +40 268 410525, +40 268 412088
www.unitbv.ro
D-lui (D-nei)
....................................................................................................... .......
COMPONENŢA
Comisiei de doctorat
Numită prin ordinul Rectorului Universităţii „Transilvania” din Braşov
Nr. 7065 din 28. 10. 2014
PREȘEDINTE: Prof. univ. dr. ing. Olimpiu MUNTEANU
DECAN – Facultatea de Design de Produs și Mediu
Universitatea “Transilvania” din Brașov
CONDUCĂTOR Prof. univ. dr. ing. Ciprian Iustin OLTEANU
ȘTIINȚIFIC: Universitatea “Transilvania” din Brașov
REFERENȚI: Prof. univ. dr. ing. Vistrian MĂTIEȘ
Universitatea Tehnică din Cluj – Napoca
Prof. univ. dr. ing. Valer DOLGA
Universitatea “Politehnica” din Timișoara
Prof. univ. dr. fiz. Sorin ZAMFIRA
Universitatea “Transilvania” din Brașov
Data, ora şi locul susţinerii publice a tezei de doctorat: 05.12.2014, ora 8,00, sala UII3.
Eventualele aprecieri sau observaţii asupra conţinutului lucrării vă rugăm să le transmiteţi
în timp util, pe adresa [email protected].
Totodată vă invităm să luaţi parte la şedinţa publică de susţinere a tezei de doctorat.
Vă mulţumim.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
2
CUPRINS
1. Necesiatatea, actualitatea și obiectivele tezei de doctorat............................................ 5
1.1. Obiectivele tezei de doctorat............................................................................... 5
1.2. Scurt istoric al roboţilor....................................................................................... 5
1.2.1. Clasificarea roboţilor.................................................................................. 7
1.3. Roboți mobili. Stadiul actual al cunoașterii......................................................... 7
1.3.1. Sistemul senzorial al roboţilor mobili........................................................... 9
1.3.1.1. Senzori de stare externă..................................................................... 10
1.3.1.2. Senzori de stare internă...................................................................... 11
1.3.1.3. Fuziunea datelor furnizate de senzori................................................ 11
1.3.2. Considerații privind navigația roboţilor mobili.......................................... 11
1.3.2.1. Metodele de navigaţie a roboţilor autonomi...................................... 12
1.3.2.2. Module de navigaţie ale roboților mobili...................................... ..... 13
1.3.2.3. Exemplu de navigație a robotului mobil KSR4 Escape..................... 15
1.4. Concluzii.............................................................................................................. 16
2. Cercetări experimentale privind deplasarea roboților mobili în spaţiul de lucru......... 17
2.1. Introducere.......................................................................................................... 17
2.1.1. Spaţiul de lucru........................................................................................... 17
2.1.2. Obstacolele din spaţiul de lucru.................................................................. 17
2.2. Roboții mobili utilizaţi la cercetările experimentale............................................ 18
2.2.1. Robotul mobil Pro Bot 128......................................................................... 18
2.2.2. Robotul Spy Video TRAKR..................................................................... 19
2.2.3. Robotul KSR4 – "ESCAPE"...................................................................... 19
2.2.4. Robotul Umanoid Maxibot........................................................................ 19
2.2.5. Robotul păşitor Hexbug Delta.................................................................... 20
2.2.6. Vehicul telecomandat................................................................................. 20
2.3. Cercetări privind sistemul de locomoție al roboților mobili................................ 20
2.3.1. Determinarea abaterii liniare de la traiectorie............................................ 20
2.3.2. Determinarea accelerației și vitezei roboților în funcție de sistemul de
locomoție.............................................................................................................
22
2.4. Cercetări privind detecția obstacolelor din spațiul de lucru............................... 25
2.4.1. Orientarea roboților într-un spațiu de lucru cu obstacole fixe................. 26
2.4.2. Orientarea roboților într-un spațiu de lucru de tip labirint....................... 27
2.5. Concluzii........................................................................................................... 28
3. Cercetări privind măsurarea distanței cu senzorii ultrasonici..................................... 29
3.1. Considerații teoretice privind transmiterea ultrasunetelor................................. 29
3.1.1. Concluzii................................................................................................... 31
3.2. Cercetări experimentale privind comportamentul senzorilor ultrasonici în
procesul de detecție..................................................................................................
32
3.2.1. Introducere............................................................................................... 32
3.2.2. Senzorii ultrasonici utilizaţi la cercetările experimentale......................... 32
3.2.3. Erori de măsurare...................................................................................... 32
3.2.4. Determinarea distanței dintre senzorii ultrasonici și obstacole................ 33
3.2.4.1. Determinarea distanței față de obstacole de dimensiuni diferite..... 35
3.2.4.2. Determinarea distanței față de obstacole de forme diferite............. 36
3.2.4.3. Determinarea distanței față de obstacole din materiale cu texturi
diferite..........................................................................................................
37
3.2.4.4. Determinarea distanței față de un obstacol la viteze diferite ale
curentului de aer...........................................................................................
38
3.2.5.5. Determinarea distanței cu un senzor montat pe o platformă rotativă 39
3.2.5. Concluzii................................................................................................... 40
4. Modelarea sistemului senzorial al roboților mobili.................................................... 41
4.1. Considerații teoretice privind modelarea rezultatelor obținute experimental... 41

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
3
4.2. Model matematic de calcul a timpului de răspuns și a distanței...................... 42
4.3. Modelarea prin simulare a configurației senzorilor pentru un robot mobil.... 45
4.4. Concluzii......................................................................................................... 48
5. Optimizarea sistemului senzorial al roboților mobili................................................ 49
5.1. Considerații privind alegerea robotului potrivit în vederea optimizării.......... 49
5.2. Contribuții privind optimizarea sistemelor senzorial și de locomoție............. 49
5.2.1. Optimizarea sistemului senzorial al robotului Pro Bot 128.................... 49
5.2.2. Optimizarea sistemului de locomoție al robotului Pro Bot 128.............. 53
5.3. Concluzii.......................................................................................................... 56
6. Concluzii finale și contribuții personale.................................................................... 57
6.1. Concluzii finale................................................................................................ 57
6.2. Contribuții personale........................................................................................ 59
6.3. Valorificarea rezultatelor cercetării.................................................................. 60
6.4. Direcții viitoare de cercetare............................................................................ 62
BIBLIOGRAFIE.......................................................................................................... 63
ABSTRACT.................................................................................................................
CURRICULUM VITAE.............................................................................................
67
69
CONTENTS
1. Thesis timeliness and objectives................................................................................... 5
1.1. Thesis objectives.................................................................................................. 5
1.2. History of robots.................................................................................................. 5
1.2.1. Classification of robots............................................................................... 7
1.3. Mobile robots. Current state of knowledge......................................................... 7
1.3.1. The sensorial system of mobile robots......................................................... 9
1.3.1.1. External state sensors......................................................................... 10
1.3.1.2. Internal state sensors......................................................................... 11
1.3.1.3. Data provided by sensor fusion......................................................... 11
1.3.2. Considerations for mobile robot navigation............................................... 11
1.3.2.1. Autonomous robot navigation methods............................................ 12
1.3.2.2. Modules of navigation for mobile robots.......................................... 13
1.3.2.3. Example of navigation for mobile robot KSR4 Escape.................... 15
1.4. Conclusions......................................................................................................... 16
2. Experimental research on mobile robots moving in the workspace............................. 17
2.1. Introduction......................................................................................................... 17
2.1.1. The workspace............................................................................................ 17
2.1.2. Obstacles in the workspace......................................................................... 17
2.2. Mobile robots used in experimental research...................................................... 18
2.2.1. Mobile robot Pro Bot 128........................................................................... 18
2.2.2. Robot Spy Video TRAKR......................................................................... 19
2.2.3. Robotul KSR4 – "ESCAPE"...................................................................... 19
2.2.4. Humanoid robot Maxibot........................................................................... 19
2.2.5. Walking robot Hexbug Delta..................................................................... 20
2.2.6. Remote controlled vehicle.......................................................................... 20
2.3. Research on locomotion system of mobile robots.............................................. 20
2.3.1. Determination of linear deviation from the trajectory............................... 20
2.3.2. Determination of acceleration and velocity based of robots locomotion
system..................................................................................................................
22
2.4. Research on the detection of obstacles in the workspace................................... 25
2.4.1. Guidance of robots in a workspace with fixed obstacles......................... 26

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
4
2.4.2. Guidance of robots in a labyrinth type workspace.................................. 27
2.5. Conclusions....................................................................................................... 28
3. Research on ultrasonic distance measurement sensors............................................... 29
3.1. Theoretical considerations on transmission ultrasound..................................... 29
3.1.1. Conclusions............................................................................................... 31
3.2. Experimental research on the behavior of ultrasonic sensors in the detection
process......................................................................................................................
32
3.2.1. Introduction............................................................................................. 32
3.2.2. Ultrasonic sensors used in experimental research.................................... 32
3.2.3. Measurement errors.................................................................................. 32
3.2.4. Determining the distance between the ultrasonic sensors and barriers.... 33
3.2.4.1. Determining the distance to obstacles of different sizes................. 35
3.2.4.2. Determining the distance to obstacles of different shapes.............. 36
3.2.4.3. Determining the distance to obstacles from materials with different
textures.........................................................................................................
37
3.2.4.4. Determining distance from an obstacle at different speeds of air
flow..............................................................................................................
38
3.2.5.5. Determining the distance to a sensor mounted on a rotating
platform.......................................................................................................
39
3.2.5. Conclusions.............................................................................................. 40
4. Modelling the sensorial system of mobile robots...................................................... 41
4.1. Theoretical modeling the experimental results............................................... 41
4.2. Mathematical model for calculating the response time and distance.............. 42
4.3. Modelling by simulation of sensor configuration for a mobile robot............ 45
4.4. Conclusions..................................................................................................... 48
5. Optimizing the sensory system of mobile robots..................................................... 49
5.1. Considerations for choosing the right robot to optimize................................ 49
5.2. Contributions to optimizing sensorial and locomotion systems..................... 49
5.2.1. Optimizing sensorial system for Pro Bot 128 robot............................... 49
5.2.2. Optimizing locomotion system for Pro Bot 128 robot........................... 53
5.3. Conclusions..................................................................................................... 56
6. Final conclusions and personal contributions........................................................... 57
6.1. Final conclusions.............................................................................................. 57
6.2. Personal contributions...................................................................................... 59
6.3. Valorisation of research results........................................................................ 60
6.4. Future research directions................................................................................ 62
REFERENCES............................................................................................................ 63
ABSTRACT.................................................................................................................
CURRICULUM VITAE.............................................................................................
67
69

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
5
CAPITOLUL 1. NECESITATEA, ACTUALITATEA ȘI OBIECTIVELE
TEZEI DE DOCTORAT
Prezenta teză are ca scop optimizarea configuraţiei senzorilor unui robot mobil autonom
în vederea utilizării acestuia în diferite aplicaţii casnice şi industriale (se va dezvolta în
prealabil o aplicație educaţională pentru simularea detecției obiectelor cu senzorii ultrasonici).
Robotul mobil este un sistem compus din mai multe sisteme mecanice şi senzoriale,
actuatori, având şi o unitate centrală de comandă. Mecanica stabileşte înfăţişarea robotului şi
mişcările posibile în timpul funcţionării. Senzorii şi actuatorii sunt întrebuinţaţi la interacţiunea
cu mediul de operare (spaţiul de lucru). Mecanismul de direcţionare ghidează robotul pentru a -
și îndeplini obiectivul cu succes, evaluând informaţiile primite de la senzori. Acest mecanism
reglează motoarele şi planifică mişcările care trebuie efectuate [L3].
1.1. Obiectivele tezei de doctorat
Obiectivul principal este:
Optimizarea sistemului senzorial al unui robot mobil în vederea îmbunătățirii
comportamentului la orientarea în spațiul de lucru.
Obiective operaționale și specifice rezultate sunt:
1. Elaborarea materialelor referitoare la evoluţia senzorilor şi la stadiul actual din
domeniul roboticii mobile.
2. Realizarea obstacolelor, a parametrilor acestora şi testarea roboților și elementelor
senzoriale prevăzute pentru a fi integrate hardware şi software pentru optimizare.
3. Realizarea standurilor de lucru pentru testarea senzorilor ultrasonici şi pentru
desfăşurarea experimentelor.
4. Dezvoltrea unor programe software pentru simularea detecției obiectelor cu senzorii
ultrasonici.
5. Efectuarea de măsurători de distanță cu senzori ultrasonici de diferite tipuri.
6. Modelarea şi analiza experimentală a valorilor obținute în urma testelor.
7. Implementarea senzorilor ultrasonici în sistemul senzorial al robotului ales pentru
optimizare.
1.2. Scurt istoric al roboţilor
Termenul robot (din cehă robot) a fost utilizat de Josef Čapek şi Karel Čapek în lucrările
lor de Science Fiction la începutul secolului XX ("Roboţii universali ai lui Rossum"). Cuvântul
robot este de origine slavă şi se poate traduce prin: muncă, clacă sau muncă silnică. Karel
Čapek a descris în una din piesele sale din anul 1921, roboţi umanoizi cu asemănare umană,
care sunt crescuţi în rezervoare [S2].
Bazele roboţilor din zilele noastre se află într-o perioadă mult mai îndepărtată. Primele
modele de maşinării pot fi mai degrabă numite automate (provenind din grecescul automatos,
care se mişcă singur). Acestea nu puteau executa decât câte un singur obiectiv, fiind constrânse
de construcţia rudimentară.
Matematicianul grec Archytas (428 – 347 ÎH) a construit, conform unor relatări, unul
dintre aceste prime automate: un porumbel propulsat cu vapori, care putea zbura singur. Acest
porumbel din lemn era umplut cu aer sub presiune şi avea un ventil care permitea deschiderea
şi închiderea printr-o contragreutate. La prima testare aparatul a reuşit sa zboare 200 m, dar
după aterizare nu a mai putut decola [C8].

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
6
Dezvoltarea electrotehnicii în secolul XX a adus şi dezvoltarea roboticii. Printre primii
roboţi mobili se numără sistemul Elmer şi Elsie construit de William Grey Walter în anul 1948.
Aceste triciclete se puteau îndrepta spre o sursă de lumină şi puteau să recunoască coliziuni în
împrejurimi [B11].
Fig. 1.1. Sistemul Elmer şi Elsie, primul robot mobil
Robotul industrial a luat naştere în anul 1956. George Devol a depus candidatura în SUA
pentru un patent în legătură cu "transferul programat de articole". Câţiva ani după aceea a
construit împreună cu Joseph Engelberger robotul Unimate [S2]. Acest robot cu o greutate de
aproximativ două tone a fost mai întâi introdus în montarea de iconoscoape pentru televizoare,
găsindu-şi apoi drumul în industria de automobile. Programele pentru acest robot au fost
salvate sub formă de comenzi direcţionare pentru motoare pe un cilindru magnetic. Din acest
moment se introduc roboţi industriali ca Unimate în multe domenii ale producţiei fiind
permanent dezvoltaţi pentru a putea face faţă cererilor complexe care li se impun.
Fig. 1.2. Unimate, primul robot industrial
Robotul Greenman a fost primul model umanoid manipulator asamblat în 1983. Sistemul
vizual era asigurat de 525 camere video, fiecare având posibilitatea de rotire cu 35 de grade.
Monitorizarea se făcea cu ajutorul unei căşti de pilot. Acest sistem de manipulare a fost
dezvoltat pentru lucrul în medii ostile, mai puţin în mediul marin şi submarin [S2].
Fig. 1.3. Greenman, primul robot umanoid

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
7
1.2.1. Clasificarea roboţilor
În funcţie de mediul în care robotul operează, se disting trei categorii:
- Roboţi tereştri;
- Roboţi marini;
- Roboţi zburători.
În funcţie de utilizarea lor, roboţii pot fi:
- Roboţi industriali;
- Roboţi casnici;
- Roboţi militari;
- Roboţi exploratori;
- Roboţi de companie (robot umanoid);
- Roboţi de divertisment (jucării, roboţi utilizaţi în competiţii etc.).
Din punct de vedere al gradului de libertate există două categorii:
- Roboţi ficşi;
- Roboţi mobili.
Din punct de vedere al sistemului de locomoţie, roboţii mobili pot fi:
- Roboţi cu roţi;
- Roboţi cu şenile;
- Roboţi păşitori;
- Roboţi târâtori.
1.3. Roboți mobili. Stadiul actual al cunoașterii.
Unul din obiectivele esenţiale ale roboticii este elaborarea roboţilor autonomi. Asemenea
roboţi ar putea executa sarcinile de îndeplinit fără alte intervenţii umane. Comenzile primite
vor preciza ce doreşte utilizatorul şi nu modul în care robotul să execute comenzile. Roboţii
capabili să îndeplinească aceste operaţii vor fi echipaţi cu senzori de percepere a mediului
înconjurător, aflate sub controlul unui sistem de calcul [N1].
Progresul roboţilor autonomi prezintă un interes major în multe domenii de aplicaţii,
incluzând diversele procese tehnologice, construcţiile, procesarea deşeurilor, explorarea
spaţiului, oceanelor şi a zonelor de risc ridicat, medicină, asistenţa persoanelor cu handicap,
etc.
Dezvoltarea tehnologiilor necesare pentru obţinerea unor roboţi mobili care să ajute sau
să înlocuiască diferite operaţii realizate de om implică multe domenii ca cele ale senzorilor,
inteligenţei artificiale, sistemelor de calcul, planificării traiectoriei, procesării semnalelor,
controlului motoarelor, electronicii şi ştiinţei calculatoarelor.
Orientarea într-un mediu total necunoscut, folosind senzori pentru detectarea obstacolelor
şi comunicaţia cu un calculator aflat la distanţă sunt două aspecte importante care trebuie luate
în considerare atunci când se operează cu un robot mobil. Capacitatea roboţilor de a percepe
mediul înconjurător, precum şi de a-şi schimba comportamentul pe baza informaţiilor primite
este ceea ce face ca roboţii, mai ales cei mobili, să fie atât de interesant de construit şi utilizat.
Fără senzori, roboţii nu ar putea executa altceva decât sarcini ale operatorului uman.
Robotul mobil este un sistem complex care poate efectua diferite activităţi într-o varietate
de situaţii specifice lumii reale [H3]. El este o combinaţie de dispozitive echipate cu
servomotoare şi senzori (aflate sub controlul unui sistem ierarhic de calcul) ce operează într-un
spaţiu real, marcat de o serie de proprietăţi fizice (de exemplu gravitaţia care influenţează
mişcarea tuturor roboţilor care funcţionează pe pământ) şi care trebuie să planifice mişcările
astfel încât robotul să poată realiza o sarcină în funcţie de starea iniţială a sistemului şi în
funcţie de informaţia existentă, legată de mediul de lucru. Succesul în îndeplinirea acestor
sarcini depinde atât de cunoştinţele pe care robotul le are asupra configuraţiei iniţiale a

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
8
spaţiului de lucru, cât şi de cele obţinute pe parcursul evoluţiei sale. Problemele specifice ce
apar la roboţii mobili ar fi următoarele: evitarea impactului cu obiectele staţionare sau în
mişcare, determinarea poziţiei şi orientării robotului pe teren, planificarea unei traiectorii
optime de mişcare [M5]. În cazul unui sistem robotic automat distribuit, poziţiile spaţiale sunt
de o extremă importanţă şi de ele depinde îndeplinirea scopurilor dorite şi funcţionarea
întregului sistem. Cu alte cuvinte, robotul trebuie să fie capabil să-ţi planifice mişcările, să
decidă automat ce mişcări să execute pentru a îndeplini o sarcină, în funcţie de aranjamentul
momentan al obiectelor din spaţiul de lucru. Planificarea mişcărilor nu constă dintr-o problemă
unică şi bine determinată, ci dintr-un ansamblu de probleme dintre care unele sunt mai mult
sau mai puţin variante ale celorlalte. Evitarea coliziunii cu obstacole fixe sau mobile (de
exemplu alţi roboţi mobili) aflate în spaţiul de lucru al robotului se poate face prin mai multe
metode: realizarea unei apărători mecanice care prin deformare opreşte robotul, folosirea
senzorilor care măsoară distanţa până la obstacolele de pe direcţia de deplasare, folosirea
senzorilor de proximitate, folosirea informaţiilor corelate de la mai multe tipuri de senzori
[M4]. Localizarea obiectelor se poate realiza şi prin contact fizic, dar acesta impune restricţii
asupra vitezei de mişcare a structurii manipulate. Contactul fizic dintre robot şi obiectele din
mediu generează forţe de reacţiune care modifică starea robotului. Vitezele mari de lucru fac ca
efectele dinamice ale unui contact fizic cu obstacole sau obiecte manipulate să fie riscante (pot
duce la deteriorarea obiectelor sau a robotului). Navigarea robotului este posibilă şi fără o
determinare a poziţiei şi orientării faţă de un sistem de coordonate fix, dar această informaţie
este utilă pentru sisteme de comandã a mişcării. Dintre metodele de navigaţie mai des utilizate
se pot menţiona: măsurarea numărului de rotaţii făcute de roţile motoare, folosirea de
acceleratoare şi giroscoape, geamanduri electromagnetice instalate în teren, semnalizatoare
pasive sau semi-pasive de tip optic sau magnetic. Informaţiile despre spaţiul de lucru se pot
obţine independent de oricare acţiune a robotului şi se pot organiza pe hărţi de navigaţie.
Harta oferă o configuraţie a structurii iniţiale a spaţiului de lucru. Configuraţia cerută se obţine
prin actualizarea hărţii iniţiale cu informaţii obţinute de la sistemul de navigaţie al robotului
autonom. Pe baza modelului iniţial se poate stabili o traiectorie posibil de urmărit pentru
atingerea scopului, traiectorie cu atât mai apropiată de cea reală cu cât informaţiile despre
mediul de lucru sunt mai aproape de realitatea din teren.
Informaţiile existente iniţial pot contribui la o împărţire a spaţiului în zone accesibile şi
zone interzise [C5]. În procesul de modelare a spaţiului de lucru, este important să se ţină
seama de dimensiunile şi posibilităţile fizico-mecanice de abordare a acestor obstacole de
către robot în funcţie de dimensiunile lor. Obstacolele din spaţiul de lucru trebuie considerate
cu dimensiunile majorate, atât pentru siguranţa mişcării robotului cât şi pentru simplitatea
algoritmului de planificare, permiţând considerarea robotului ca un punct material. Roboţii care
îşi planifică singuri traiectoria de mişcare sunt dotaţi cu funcţii de decizie şi încadraţi în clasa
roboţilor inteligenţi. Există roboţi la care traiectoria nu se planifică, este fixă şi marcată pe
teren. În acest caz ei trebuie să evite numai obstacole interpuse accidental pe traseul marcat şi
să prelucreze informaţia de navigaţie realizând astfel urmărirea traiectoriei fixate. Aceşti
roboţi mobili nu sunt inteligenţi, dar sunt deosebit de utili pentru asigurarea transportului în
atelierele flexibile ale producţiei. Robotul mobil este pus în situaţia de a desfăşura acţiuni
similare cu cele ale operatorului uman. Acest lucru determină existenţa unor anumite
dispozitive prin care să se culeagă informaţii din mediul de lucru, care să realizeze
interacţiunea robot - mediu cu ajutorul unor caracteristici ale mediului sau ale obiectelor din
mediu şi o unitate centrală care să prelucreze în timp real informaţia senzorială, să o
transforme într-o formă utilă pentru sistemul de comandă. Sistemul senzorial mai este numit şi
sistem de măsurare. El asigură măsurarea unor mărimi fizice şi eventual perceperea unor
modificări semnificative a acestor mărimi. Datorită sistemului senzorial se pot pune în
evidenţã şi caracteristicile geometrice şi chimice ale obiectelor din mediul de lucru. Senzorii
datorită caracteristicilor pe care le au pot explora zona de lucru, zona de contact, cea apropiată ,
cea îndepărtată, iar senzorii foarte puternici chiar şi zone foarte îndepărtate. Caracteristicile
senzoriale ale unui robot depind foarte mult de gradul său de autonomie, de aplicaţiile pentru
care a fost proiectat şi de tipul mediului de lucru [M4].

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
9
1.3.1. Sistemul senzorial al roboţilor mobili
Senzorii sunt dispozitive care pot măsura diferite proprietăţi ale mediului precum:
temperatura, distanţa, rezistenţa fizică, greutatea, mărimea etc. În funcţie de informaţiile
primite de la senzori robotul mobil se orientează în mediul de lucru.
În cel mai general caz, senzorii pot fi împărţi în două categorii [I1], şi anume:
Senzori de stare internă - senzori care oferă informaţii despre starea internă a
robotului mobil, spre exemplu nivelul bateriei sau poziţia roţilor.
Senzori de stare externă - senzori care oferă informaţii despre mediul ambiant în care
robotul funcţionează. Senzorii de stare externă se mai pot împărţi la rândul lor în două
categorii: senzori cu contact, mai precis acei senzori care culeg informaţia din mediu
prin atingere (senzor tactil), respectiv senzori fără contact, care preiau informaţia din
mediu de la distanţă (cameră video, senzor ultrasonic, senzor infraroşu) .
Un senzor poate fi activ sau pasiv. Senzorii activi sunt acei senzori care emit energie în
mediu pentru a putea observa anumite caracteristici ale acestuia, spre deosebire de senzorii
pasivi care primesc energie din mediu pentru a putea prelua informaţia.
De asemenea, toate tipurile de senzori sunt caracterizate printr-o serie de proprietăţi, cele
mai importante fiind [P4]:
- Sensibilitatea: raportul dintre semnalul de ieşire şi semnalul de intrare;
- Liniaritatea: exprimă dacă raportul dintre intrare şi ieşire este constant;
- Intervalul de măsurare: diferenţa între distanţa minimă şi maximă măsurabilă;
- Timpul de răspuns: timpul necesar pentru ca informaţia de la intrare să fie observabilă
la ieşire;
- Acurateţea: diferenţa între semnalul măsurat si semnalul real;
- Repetabilitatea: diferenţele intre măsurători succesive ale aceleiaşi entităţi;
- Rezoluţia: exprimă cea mai mică unitate de incrementare a semnalului măsurat;
- Preţul senzorului;
- Puterea de calcul necesară pentru a interpreta rezultatele;
- Tipul de semnal la ieşire;
- Greutatea, mărimea şi cantitatea de energie consumată pentru a face o măsurătoare.
Orice model al unui senzor ar trebui să includă şi un model intern al zgomotului care
poate afecta senzorul în momentul citirii informaţiei. Problema de a recupera informaţia din
mediu din datele primite de la senzor poate fi destul de complexă.
Orice tip de senzor poate fi afectat de mai multe tipuri de erori. Dintre acestea, cele mai
importante sunt erorile incidentale, erorile sistematice şi erorile stohastice. Erorile incidentale
apar ocazional şi pot avea un efect neprevăzut asupra informaţiei, ele provenind în cea mai
mare parte de la măsurători efectuate greşit. Erorile sistematice au o influenţă predictibilă
asupra acurateţii informaţiei, acestea provenind de la o interpretare greşită a parametrilor în
algoritmii de estimare, sau din cauza unor neconcordanţe în modelare. În fine, erorile
stohastice, au un caracter aleator, ele diferind de fiecare data când robotul execută aceeaşi
operaţie.
În lumea roboţilor mobili se întâlnesc o mare varietate de tipuri de senzori. O clasificare
de bază a acestora ar putea fi [V1]:
Senzori de distanţă - senzori care oferă informaţii despre distanţa între senzor şi
obiectul de măsurat din mediu;
Senzori de poziţie - senzori care oferă informaţii despre poziţia robotului în termeni
absoluţi;
Senzori de mediu - senzori care oferă informaţii despre diverse proprietăţi şi
caracteristici ale mediului (exemplu: temperatură, culoare);
senzori inerţiali - senzori care măsoară proprietăţi de mișcare ale robotului.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
10
1.3.1.1. Senzori de stare externă
Senzori de contact
Cel mai des întâlnit tip de senzori de contact în lumea roboţilor mobili este reprezentat de
senzorii tactili. Termenul de senzor tactil se referă la un traductor care este sensibil la atingere,
forţă sau presiune. Aceşti senzori pot fi piezorezistivi, piezoelectrici, capacitivi sau
electrorezistivi [B3].
Senzori în infraroşu (IR)
Senzorii în infraroşu (IR) constituie categoria cea mai simplă de senzori de distantă
folosită la un robot mobil. Metoda lor de funcţionare este foarte simplă, fiecare senzor fiind
echipat cu un emiţător şi un detector. Emiţătorul transmite un fascicol de lumină în spectrul
infraroşu (de regulă sunt folosite lungimi de undă în intervalul 880-990nm), fascicol care se
propagă în mediu, iar apoi se reflectă de obiectele aflate în acesta [B6]. Fascicolul reflectat este
captat de componenta detector, urmând apoi ca printr-un calcul matematic simplu, să se
estimeze o distanţă între senzorul în infraroşu şi obiectul detectat din mediu.
Senzori ultrasonici
Categoria de senzori cea mai des întâlnită la un robot mobil o constituie categoria
senzorilor ultrasonici. Întâlniţi în literatura de specialitate şi sub denumirea de sonar, senzorii
ultrasonici folosesc un principiu oarecum asemănător cu senzorii IR., dar în loc de a transmite
fascicole luminoase, ei folosesc semnale acustice. Un emiţător transmite un semnal acustic în
mediu, urmând apoi ca reflecţia acestuia să fie recepţionată de componenta detector a
senzorului. Timpul în care semnalul este receptat înapoi de senzor precum şi atenuarea
semnalului reprezintă aspecte exploatate de diferitele tipuri de senzori sonar [D3].
Sunetele transmise de senzori sunt de regulă în spectrul de sunete ultrasonice, având o
frecvenţă foarte înaltă pentru a nu putea fi detectate de urechea umană.
Sensibilitatea unui senzor ultrasonic nu este uniformă, ci consistă dintr-un lob principal şi
câteva loburi laterale mai mici. De asemenea, această sensibilitate diferă de la un senzor la
altul.
Senzori GPS
Sistemul de poziţionare globală prin satelit (Global Positioning System) a fost iniţial
dezvoltat de către Departamentul de Apărare al SUA începând cu anul 1973. Sistemul este
alcătuit din aproximativ 21 de sateliţi [Z1], si permite oricărui receptor autorizat să-şi calculeze
poziţia şi viteza cu care se deplasează. Sistemul GPS nu poate fi folosit în interiorul clădirilor,
deoarece el necesită ca între receptor şi satelit să existe vizibilitate directă. Momentan există
mat multe implementări ale serviciului, printre care SPS (Standard Positioning System)
disponibil pentru civili, respectiv PPS (Precise Positioning System), disponibil pentru armată.
SPS are o acurateţe de aproximativ 100m pe orizontală, fapt pentru care nu este folosit prea
mult în lumea roboţilor mobili.
Senzori video
Senzorii vizuali sunt reprezentaţi de regulă în lumea roboţilor mobili de camere video. În
momentul de faţă senzorii de imagine folosesc două tehnologii: CCD şi CMOS.
Camerele video obţin o cantitate mare de informaţii din câmpul lor vizual. Procesarea
acestor date poate necesita o putere de calcul ridicată, mai ales dacă se doreşte obţinerea unor
performanţe optime din informaţiile culese [S4].

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
11
Aplicaţiile senzorilor vizuali sunt extrem de variate:
- control şi inspecţie: stări de suprafeţe, culori, aspect, forme, contur şi dimensiuni;
- verificare: prezenţa sau absenţa unui obiect;
- identificări şi localizări de obiecte: în plan (2D) sau în spaţiu (3D);
- urmărirea unui contur.
1.3.1.2. Senzori de stare internă
Senzorii de stare internă sunt acei senzori care oferă informaţii despre starea internă a
robotului mobil. Senzorii din această categorie oferă fie informaţii legate de poziţia robotului
(odometrie), fie informaţii referitoare la vitezele sau acceleraţiile liniare, respectiv unghiulare
ale robotului (accelerometru, giroscop).
Senzorii care oferă informaţii despre poziţie, se regăsesc de regulă sub forma encoderelor
la motoarele robotului. Encoder-ul este un dispozitiv (circuit, traductor, software) care
transformă semnalul primit (numărul de rotaţii) într-un semnal electric. Prin măsurarea rotaţiei
roţilor robotului, şi apoi interpretarea acestei informaţii se poate estima poziţia robotului.
Semnalul provenit de la encodere poate oferi informaţii despre direcţia în care se deplasează
robotul, viteza cu care se deplasează robotul precum şi distanţa aproximativă care a parcurs-o
robotul de la ultima evaluare [P4].
Teoretic, poziţia exactă a robotului ar putea fi dedusă doar din informaţiile de odometrie
provenite de la encodere, în sensul că distanţa parcursă ar trebui să fie egală cu 2πr, unde r
reprezintă raza roţii respective. În practică însă, în cel mai bun caz, se poate şti doar că
informaţia de la encodere conţine o anumită eroare, şi că această eroare de regulă nu scade
niciodată. În cea mai rea situaţie, când roţile robotului alunecă, nu mai există nici o relaţie între
mişcarea roţilor si mişcarea robotului.
Senzorul care permite determinarea vitezelor sau acceleraţiile unghiulare ale robotului este
giroscopul. Elementul component fundamental al tuturor dispozitivelor giroscopice - indiferent de
destinaţia acestora - îl constituie giroscopul în formă de volant având rolul de purtător de moment
cinetic. Pentru menţinerea lui în mişcare de rotaţie se utilizează diferite mijloace de acţionare.
Ansamblul format din motorul de acţionare (pneumatic sau electric) şi giroscop (volant) se
numeşte giromotor [B3].
1.3.1.3. Fuziunea datelor furnizate de senzori
Pentru majoritatea sarcinilor atribuite unui robot mobil, folosirea unui singur tip de
senzori nu poate da rezultate satisfăcătoare. Spre exemplu, pentru navigare, anumite obiecte din
mediu pot fi detectate doar de senzori IR, iar altele doar de senzori ultrasonici, şi doar unele de
ambele tipuri de senzori. Se pune deci problema găsirii unei metode care să combine într-un
mod eficient informaţiile de la o multitudine de senzori de categorii şi caracteristici diferite.
Termenul cel mai des întâlnit în literatura de specialitate este „fuziune de senzori”. În contextul
roboţilor mobili, fuziunea trebuie să fie efectuată pe următoarele trei nivele [A1]:
- Trebuie să combine măsurători de senzori de categorii diferite;
- Trebuie să combine măsurători din poziţii diferite;
- Trebuie să combine măsurători efectuate la diferite intervale de timp.
1.3.2. Considerații privind navigația roboţilor mobili
Sistemul de navigaţie reprezintă componenta cea mai complexă a roboţilor mobili
autonomi. Instrumentele de navigaţie pot fi aplicate roboţilor autonomi sub diferite forme
cinematice şi geometrice.
Pentru navigaţie au fost folosite numeroase principii [B8]: odometrie (măsurarea relativă
a poziţiei prin analiza numărului de rotaţii şi orientarea roţilor) , navigaţie inerţială (pe baza
măsurătorilor relative realizate prin intermediul giroscopului), ghidare activă (calculul poziţiei
absolute prin măsurarea distantei până la cel puţin trei repere), recunoaşterea punctelor de reper

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
12
artificiale şi recunoaşterea puncte de reper naturale (se folosesc puncte de reper existente din
mediul înconjurător).
1.3.2.1. Metodele de navigaţie a roboţilor autonomi
Metodele de navigaţie a roboţilor autonomi sunt din cele mai diverse, dată fiind gama
largă de utilizare a roboţilor şi aplicaţiile acestora. Mediul înconjurător robotului are o
importanţă crucială pentru funcţionarea şi orientarea acestuia, şi de aceea toate abordările
acestei probleme pornesc de la mediu. După acest considerent, se pot evidenţia trei principii de
navigaţie [F2]:
1. Navigaţia globală – raportare directă prin coordonate absolute la harta mediului
înconjurător;
2. Navigaţia locală – prin determinarea poziţiei relativ faţă de obiecte imediat apropiate de
robot, staţionare sau în mişcare;
3. Navigaţia individuală – aflarea poziţiei robotului cu ajutorul unor dispozitive dedicate
monitorizării deplasărilor făcute de acesta.
Navigaţia globală
Acest tip de navigaţie se aplică la roboţii ce au de parcurs distanţe mari, în spaţii
deschise, fără repere imediate şi la distanţe foarte mari faţă de puncte de referinţă. Acest tip de
roboţi este utilizat cu precădere de industria militară, cum ar fi avioanele de recunoaştere fără
pilot uman de tip UAV, dar şi alte echipamente de pilot automat întâlnite în aeronautică, pe
vapoare sau chiar în dotarea automobilelor de ultimă generaţie. În majoritatea cazurilor,
navigaţia automată a acestora se face cu ajutorul tehnologiei GPS [B1].
Navigaţia locală
În cazul navigaţiei locale, se folosesc metode de detecţie vizuală a mediului cu ajutorul a
diferiţi senzori, cum ar fi senzorii vizuali, infraroşu, laser, sau ultrasonici. [H1]. În cadrul
navigării locale este vizată o modelare şi o interpretare a mediului de către robot, fără ca
informaţiile despre mediu sa îi fie furnizate în prealabil. Această interpretare duce la diferite
tipuri de reprezentări ale mediului înconjurător, făcute după modele în funcţie de aplicaţie.
Astfel mediul poate fi interpretat mai uşor prin stabilirea unor puncte de reper (în literatura de
specialitate sunt denumite landmarks) de către robot prin recunoaşterea unor anumite obiecte
sau caracteristici ale mediului. Aceste repere pot fi stabilite artificial, în puncte cheie, acestea
fiind realizate astfel încât să poată fi detectate cât mai uşor. Pe baza interpretării mediului,
robotul poate realiza hărţi bidimensionale sau tridimensionale pentru o orientare mai bună şi
prin recunoaşterea anumitor părţi din mediu, procesul de navigaţie poate fi optimizat [C5]. Cei
mai utilizaţi senzori în acest caz sunt senzorii vizuali CCD sau CMOS.
Navigaţia individuală
Navigaţia individuală, este utilizată în combinaţie cu metodele de navigaţie globală şi
locală, prin calcularea poziţiei robotului relativ la mediu prin măsurări directe asupra vitezei şi
traiectoriei parcurse de către robot. Această metodă, numită şi odometrie, oferă o corecţie mai
bună a erorilor de deplasare şi totodată este relativ simplu de implementat, soluţia regăsindu-se
la roboţii ieftini sau cu aplicaţii simple. Pentru că majoritatea roboţilor mobili utilizează roţi
sau şenile, această soluţie a devenit practic omniprezentă la aproape toţi roboţii mobili. Dintre
soluţiile de implementare se pot aminti: odometre cu perii, magnetice, inductive, capacitive,
optice [G1]. Alte metode utilizează senzori Doppler sau unde active de tip laser, sonice, radio
pentru orientare sau măsurarea vitezei. Senzorii Doppler funcţionează pe baza efectului cu
acelaşi nume, ce priveşte modificarea frecvenţei undei radiate funcţie de viteza şi direcţia
emiţătorului. [B14]. Pentru roboţii mobili, cele mai utilizate sunt laserele şi ultrasunetele, dar

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
13
dezavantajul lor constă în faptul că aplicabilitatea robotului rămâne restrânsă la incinta ce
găzduieşte aceste repere.
1.3.2.2. Module de navigaţie ale roboților mobili
Sistemul de navigaţie al roboţilor mobili este împărţit în trei module principale:
- Cercetarea şi detecţia;
- Planificarea traseului (drumului);
- Controlul mişcării.
Cercetarea şi detecţia
O parte importantă a sistemului robot mobil o reprezintă cercetarea (cartografia) şi
detecţia cât mai exactă în vederea construirii unei hărţi a mediului înconjurător (spaţiului de lucru).
Metoda de localizare şi construcţie a hărţii simultan este folosită pentru navigaţia
roboţilor mobili în spaţii mari, folosindu-se mai multe tipuri de senzori, cum ar fi senzorii
acustici sau ultrasonici, senzori de tip laser sau senzori vizuali. De asemenea mai sunt folosite
puncte topografice artificiale cum ar fi reflectori tip cod de bară, balize ultrasonice
etc.Metodele de detecţie cele mai des întălnite sunt: metoda Kalman, metoda Markov şi metoda
Monte Carlo.
Planificarea traseului (drumului)
Problema planificării mişcării unui robot mobil este aceea a găsirii unei mişcări pentru un
robot care trebuie să se deplaseze de la o configuraţie dată, la o destinaţie stabilită, într -un
mediu care conţine o mulţime de obstacole prestabilite, astfel încât robotul să nu intre în
coliziune de nici unul din acestea. Într-o problemă concretă, obstacolele nu sunt întotdeauna
statice, iar robotul nu poate fi modelat ca un singur obiect rigid, precum în cazul problemei de
bază a planificării. Este evident că un robot care se mişcă printre obstacolele mobile este
capabil de performanţe mult mai mari şi de o serie de sarcini mult mai complexe. Această
teorie are în vedere planificarea mişcării în medii de timp variabil unde atât obstacolele, cât şi
destinaţia, sunt în mişcare [B14].
Abilitatea ocolirii obstacolelor în mişcare este indispensabilă pentru orice robot real. Se
consideră, spre exemplu, un robot tip maşină ce se deplasează de-a lungul unui drum stabilit.
Sistemul senzorial al robotului poate dintr-o dată să depisteze un obiect mişcător care îi taie
drumul. În cazul acesta ar trebui să fie capabil să producă şi să execute o mişcare pentru a evita
cu siguranţă obiectul, astfel încât, prin frânare să lase obiectul să treacă pe lângă, sau prin
accelerare să-l ocolească. [M2].
Optimizarea unei probleme de planificare, în contextul amintit, presupune un consum
foarte mic de energie, dar, în acelaşi timp, trebuie să se acorde atenţie şi studiului vitezelor şi
acceleraţiilor robotului mobil. Astfel problema planificării mişcării printre obiecte mobile este
în mai multe feluri diferită şi mai complexă decât problema planificării mişcării cu obstacole
staţionare [H3].
Controlul mişcării
a) Unităţi centrale de procesare
Sarcinile pe care un robot mobil trebuie să le îndeplinească pot să fie de la foarte simple
la extrem de complexe. Totul depinde de scopul final al robotului mobil construit. În funcţie de
tipul de sarcini atribuite unui robot mobil, procesarea şi descompunerea sarcinilor în acţiuni
simple pe care robotul le poate executa necesită prezena unei unităţi centrale de procesare [L3].

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
14
Unitatea centrală de procesare se poate afla fie pe robot (en. onboard), fie la distanţă
conectată de acesta prin diverse metode (en. offboard). În mod normal, se doreşte ca robotul
mobil să fie autonom, deci să poată duce la bun sfârşit oarecum independent şi sarcini mai
complexe, fără intervenţia unui program de control din partea utilizatorului, aflat la distanţă. În
multe cazuri însă, prezenţa unei unităţi de procesare pe robot duce la o autonomie scăzută a
bateriei acestuia. O altă problemă ar putea fi creşterea în greutate a robotului, în funcţie de tipul
de unitate centrală de procesare aleasă. De asemenea, în cazul în care necesităţile
computaţionale sunt mari, s-ar putea ca o unitate centrală de procesare să nu funcționeze în
limitele fizice şi geometrice ale robotului, caz în care aceasta nu poate fi instalată [O3].
Există totuşi o serie de avantaje de a avea o unitate de procesare onboard:
Dispar întârzierile asociate comunicaţiei între o unitate de procesare offboard şi
componentele electronice ale robotului;
În cazul unor probleme de comunicare, robotul poate acţiona în continuare
autonom;
Unităţile de procesare onboard au acces direct la hardware-ul robotului, în timp ce
unităţile offboard trebuie să apeleze la un anumit protocol care să interfaţeze între
componente şi unitate.
Evident soluţia cea mai bună este ca robotul să poate funcţiona atât autonom prin
intermediul unei unităţi de procesare onboard, cât şi în regim de comunicare cu alte unităţi de
procesare mai performante, care pot asigura necesităţile computaţionale pentru sarcini mai
complexe [B11].
În practică unităţile de comunicare onboard se aleg astfel încât să aibă suficientă putere
de calcul pentru a îndeplini majoritatea sarcinilor simple, cu specificaţia să nu consume prea
multă energie. Unităţile offboard sunt de regulă reprezentate de calculatoare personale.
b) Sisteme de comunicare
Roboţii mobili trebuie să posede capacităţi de comunicare fie cu alţi roboţi din mediu fie
cu un operator uman, pentru a raporta dacă o anumită sarcină dată a fost îndeplinită cu succes,
sau nu. Sistemele de comunicare aferente roboţilor mobili pot fi de 2 categorii: cu fir respectiv
fără fir.
Comunicaţia cu fir este modalitatea cea mai simplă de transfer de date între robot şi
operator. O serie de probleme asociate transmisiei fără fir, dispar în cazul comunicaţiei de date
cu fir, cu preţul îngrădirii mobilităţii robotului. Avantajul principal al sistemelor de comunicare
cu fir este acela că, pe lângă datele transmise între robot şi operatorul uman, se mai poate
transmite şi curent electric, eliminând astfel necesitatea unei baterii onboard pe robot şi mărind
autonomia robotului [F2].
Un dezavantaj direct al folosirii unui sistem de comunicare cu fir, ar fi faptul că spaţiul de
lucru al robotului va fi limitat de lungimea maximă admisibilă a cablului. De asemenea, cablul
ar putea interfera cu sistemul de locomoţie sau chiar cu senzorii, aceştia putând raporta valori
eronate.
Sistemele de comunicare fără fir se folosesc de o serie de tehnologii de transmitere a
datelor prin aer dintre care amintim: transmisia prin unde în spectrul infraroşu, bluetooth, radio
modem-uri, WiFi şi altele.
Tehnologiile WiFi sunt deja răspândite în domeniul calculatoarelor personale, şi oferă un
suport complet de integrare al roboţilor în reţele de calculatoare. O problemă a acestor
tehnologii ar fi faptul că sunt consumatoare de energie, lucru care nu este prielnic robotului
mobil.
Eliminând problema energiei consumate, tehnologiile Bluetooth oferă servicii similare cu
dispozitivele WiFi, însă distanţa maximă admisibilă între emiţator-receptor este mult mai mica
decât în cazurile celorlalte tehnologii. În momentul de faţă, tehnologiile Bluetooth se folosesc
în interiorul clădirilor, în laborator, unde distanţa maximă fără repetor este de maxim 20m.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
15
1.3.2.3. Exemplu de navigație a robotului mobil KSR4 Escape
Pentru observarea modului de navigație al roboților mobili, a fost testat într-un spațiu de
lucru cu obstacole fixe robotul Escape [**10], care foloseşte pentru detecție trei diode infraroşu
de emitere şi un modul infraroşu de recepţie.
Fig. 1.4. Robotul mobil testat pentru observarea comportamentului într-un spațiu de lucru
S-au efectuat o serie de teste cu robotul KSR4 – Escape, într-un mediu ambiant (lungime
785mm, lăţime 380mm) de tip labirint, acesta trebuind să ajungă dintr-un capăt în celălalt capăt
ocolind mai multe obstacole de diferite forme. Obstacolele au fost realizate din polistiren
expandat de culoare albă [T3]. Au fost efectuate cinci încercări cu poziționări diferite ale
obstacolelor în spațiul de lucru (fig. 1.5).
Fig. 1.5. Poziționarea obstacolelor în mediul ambiant în care s-au realizat cele cinci încercări
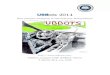
În figura 1.6 este prezentat drumul parcurs de robot în spațiul de lucru la cele cinci
încercări. Cu linie roşie au fost reprezentate mişcările înainte ale robotului, iar cu linie verde,
mişcările înapoi. Cu cerc albastru s-a marcat plecarea şi cu x roşu s-a marcat sosirea.
Fig. 1.6. Drumul parcurs de robot în spațiul de lucru în care s-au realizat cele cinci încercări
La prima încercare s-au folosit 6 obstacole. După 29 de mişcări, 15 înainte şi 14 înapoi,
robotul a epuizat sursa de energie şi nu a ajuns la punctul de sosire. Robotul a avut şi probleme

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
16
de locomoţie, având tendinţa de virare spre stânga în timpul mersului [T3]. La a doua
încercare, după 41 de mişcări, 21 înainte şi 20 înapoi, robotul a ajuns la punctul de sosire. Și la
a treia încercare s-au folosit 6 obstacole. După 33 de mişcări, 17 înainte şi 16 înapoi, robotul a
ajuns la punctul de sosire. La a patra încercare s-au folosit 7 obstacole și după 25 de mişcări, 13
înainte şi 12 înapoi, robotul a ajuns la punctul de sosire. La a cincia încercare s-au folosit 7
obstacole, obstacolul 7 fiind din sticlă. Modulul emiţător nu a sesizat obstacolul 7, lovindu-l.
Robotul nu a ajuns la punctul de sosire. În urma testelor se poate spune că sistemul de detecție
a sesizat obstacolele confecționate din polistiren de culoare albă, evitându-le în drumul spre
punctul de sosire, dar nu a sesizat obstacolul din sticlă, senzorii în infraroșu neputând să -l
detecteze.
Pentru o mai bună orientare a robotului Escape, se poate modifica sistemul senzorial
adăugând alături de cele trei diode infraroşu de emitere încă două [T5]. Cu cinci diode de
emitere se mărește unghiul de detecție, îmbunătățindu-se comportamentul robotului din punct
de vedere al detecției obstacolelor. Din considereste economice, utilizarea mai multor diode de
emisie (în număr mai mare de cinci) nu este justificată.
a) b)
Fig. 1.7. Placa de bază cu trei şi cu cinci diode de emisie
1.4. Concluzii
Roboţii mobili autonomi reprezintă clasa cea mai performantă a roboţilor mobili. Un
robot trebuie să realizeze diferite sarcini fără a-i fi specificată fiecare acţiune care urmează să
fie realizată. Pentru a realiza un robot autonom, este necesar să fie sintetizate multe tehnici,
inclusiv unele elemente de inteligenţă artificială. În mod obişnuit, robotul trebuie să obţină
informaţii din lumea înconjurătoare folosind senzori tactili vizuali şi acustici, să elaboreze un
plan pentru executarea sarcinii date, să rezolve fenomenele neaşteptate care vin fie din mediul
exterior, fie de la robot şi să înveţe din experienţă pentru a-şi îmbunătăţi performanţele.
Obstacolele nu sunt întotdeauna statice, iar robotul nu poate fi modelat ca un singur
obiect rigid. Este evident că un robot care se mişcă printre obstacolele mobile este capabil de
performanţe mult mai mari şi de o serie de sarcini mult mai complexe.
Ce se poate spune este că sistemul senzorial al unui robot de orice tip, are cea mai
importantă funcţie în orientarea acestuia în spaţiul de lucru.
Senzorii tactili sunt folosiţi în practică sub formă individuală şi sub formă matricială.
Senzorii tactili matriciali prezintă o capacitate informaţională mai mare, fiind mult mai
eficienţi decât dacă sunt folosiţi individual.
Cei mai întrebuinţaţi senzori vizuali sunt cei de tip CCD şi CMOS. Senzorii CCD, în
raport cu senzorii CMOS, oferă o calitate superioară a imaginii, zgomot redus, citire rapidă a
imaginilor de calitate superioară. Senzorii CMOS au preţul de cost mai scăzut, integrare în cip,
consum redus şi tehnologie mai simplă de fabricare. Din punct de vedere economic, în ultimii
ani s-au vândut mai multe unităţi CCD decât CMOS, dar ca proiecte de noi produse, într-un an,
raportul a fost de 5 la 1 pentru CMOS.
Senzorii de detecţie acustici, precum şi senzorii ultrasonici au calităţi superioare celor
optici impunându-se într-o serie de aplicaţii. Aceşti senzori sunt recomandabili la aplicaţii în
medii gazoase şi în condiţii grele sau care exclud utilizarea fenomenului optic (prezenta
aburilor sau prafului, perturbaţii optice etc).

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
17
CAPITOLUL 2. CERCETĂRI EXPERIMENTALE PRIVIND
DEPLASAREA ROBOȚILOR MOBILI ÎN SPAŢIUL DE LUCRU
2.1. Introducere
Pentru înțelegerea comportamentului unui robot mobil într-un spațiu de lucru dotat cu
diferite tipuri de obstacole s-au efectuat teste cu mai mulți roboți având diverse grade de
autonomie. Roboții mobili supuși testelor prezintă sisteme diferite de locomoție și folosesc mai
multe tipuri de senzori în vederea orientării în spațiul de lucru.
În urma testelor efectuate cu roboții mobili în spațiul de lucru, se va stabili metoda de
optimizare a sistemului senzorial.
O importanță deosebită o are alegerea metodelor de testare a roboților mobili în vederea
determinării particularitățior acestora și a modului de operare în spațiul de lucru.
Prima metodă aleasă depinde de precizia de operare a fiecărui robot mobil. Astfel se va
măsura abaterea de la traiectorie a roboților într-un spațiu de lucru închis fără denivelări.
O altă metodă este cea de evitare a obstacolelor dintr-un spațiu de lucru. Obstacolele
utilizate vor avea diferite forme și mărimi.
A treia metodă este cea a parcurgerii unui traseu de tip labirint pentru observarea
traiectoriei și a numărului de schimbări de direcție a fiecărui robot. De asemenea, se va măsura
distanța parcursă și se va cronometra timpul în care fiecare robot ajunge în puntul țintă (la
sosire).
2.1.1. Spaţiul de lucru
Pentru testarea performanţelor roboţilor mobili este necesară alegerea unui spaţiu de lucru
în care datele primite de la sistemul senzorial să fie cât mai puţin afectate de factorii
perturbatori din mediul ambiant. Astfel este de preferat alegerea unui spaţiu de lucru inchis cu
temperatură şi umiditate constante, ferit de zgomote şi viteze fluctuante ale curenţilor de aer.
De asemenea, trebuie ales un punct de plecare a robotului mobil, o serie de obstacole pe care
acesta trebuie să le evite în drumul său şi un punct de sosire a acestuia.
Ţinând cont de precizările făcute anterior, pentru testarea performanţelor unui robot
mobil se poate alege un spaţiu de lucru de tip încăpere cu diferite obstacole poziţionate în
interior, sau un spaţiu de tip labirint unde obstacolele sunt reprezentate de pereţii de diferite
lungimi şi forme.
2.1.2. Obstacolele din spaţiul de lucru
Obstacolele alese pentru crearea unui spaţiu de lucru optim testelor pot avea dimensiuni
şi forme diferite. De asemenea, acestea pot fi confecţionate folosind diverse tipuri de materiale.
Fig. 2.1. Realizarea obstacolelor de diferite forme

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
18
2.2. Roboții mobili utilizaţi la cercetările experimentale
Pentru studiul experimental au fost utilizați șase roboți mobili și anume:
Robot mobil Pro Bot 128;
Robot mobil Spy Video TRAKR;
Robot mobil KSR4 – ESCAPE;
Robot umanoid Maxibot;
Robot păşitor Hexbug Delta;
Mini-vehicul teleghidat.
Fig. 2.2. Roboții mobili utilizați la cercetările experimentale
Dintre cei șase roboți mobili testați trei au sistemul locomor cu roți, unul cu șenile și doi
sunt pășitori.
2.2.1. Robotul mobil Pro Bot 128
Robotul mobil PRO‐BOT 128 dispune de un procesor C‐Control PRO 128 RISC şi
două motoare care pot fi controlate separat unul de altul, o unitate optică de urmărire a liniilor,
un dispozitiv pentru evitarea coliziunilor, doi senzori turaţie pentru roţi, patru sisteme de
afişare cu leduri, un senzor acustic, doi senzori de lumină, iar drept caracteristică specială
posibilitatea de a măsura şi monitoriza propria tensiune de funcţionare [***8].
Robotul este montat pe un şasiu cu transmisie diferenţială, care îi permite să se rotească şi
să pornească în direcţia dorită. Acest tip de tracţiune are avantajul că la mişcările de rotaţie şi
de schimbare a direcţiei robotul nu are nevoie de un spaţiu mai mare decât propria
circumferinţă. Senzorii şi actuatorii permit programatorului dezvoltarea unor interacţiuni foarte

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
19
complexe cu stimuli exteriori şi astfel reacţii elaborate. Robotul are în componenţă doi senzori
de lumină, doi odometrii, un senzor de urmărire a liniei (marcajului), un sistem senzorial
infraroşu anti coliziune, un senzor acustic, şi un senzor care controlează tensiunea de
alimentare. Actuatorii sunt reprezentaţi prin două transmisii electrice DC cu reglarea continuă a
vitezei faţă/spate, un avertizor cu sunete pentru redare audio, patru led-uri de stare şi un led
pentru senzorul de urmărire a liniei.
Computerul de comandă C-Control PRO 128 este un modul compact pentru utilizare
universală la aplicaţii de măsurare, control şi reglare şi dispune de funcţia de transfer serial de
date şi stocare de date [***8]. Computerul include un microprocesor ce permite programarea
kitului în limbajele de programare BASIC şi C.
2.2.2. Robotul Spy Video TRAKR
Spy Video TRAKR este un robot programabil dotat cu cameră video color, cu
posibilitatea vederii în întuneric, microfon şi difuzor. Robotul poate fi comandat cu ajutorul
telecomenzii sau poate fi programat în vederea parcurgerii unui traseu selectat.
La comanda manuală a robotului, dirijarea acestuia se face cu ajutorul imaginilor captate
de camera video şi afişate pe ecranul color al telecomenzii. Imaginea afişată poate fi mărită şi
pe ecran pot fi vizualizate viteza de înaintare, nivelul energiei în acumulatori şi o busolă.
Pentru vederea nocturnă e folosit LED-ul infraroşu montat deasupra camerei video [***9].
Programarea robotului se face prin intermediul calculatorului, conexiunea cu acesta
făcându-se prin intermediul unui cablu USB.
2.2.3. Robotul KSR4 – "ESCAPE"
Robotul Escape [**10] foloseşte trei diode infraroşu de emitere şi un modul infraroşu de
recepţie care emit şi respectiv receptează semnale în vederea detectării obstacolelor.
Microprocesorul acestui robot îl face capabil să culeagă şi să proceseze informaţii despre
mediul înconjurător, permiţând evitarea obstacolelor în timpul funcţionării. Robotul Escape se
deplasează cu ajutorul a şase roţi şi este alimentat cu energie electrică cu patru baterii AAA de
1,5 V.
Pentru pornirea robotului, comutatorul e mutat pe poziţia ON. Ledul LED1 este aprins,
dispozitivul emite trei sunete şi robotul porneşte. Diodele emiţătoare LED2, LED3 şi LED4
trimit semnale în vederea detecţiei obstacolelor. În momentul în care un obstacol e detectat,
semnalul receptat este trimis modulului de recepţie care în funcţie de tipul semnalului permite:
a) Când dioda emiţătore din dreapta detectează un obstacol, se va auzi un singur sunet.
Motorul din stânga va merge în marşarier. Apoi ambele motoare vor merge înainte.
b) Când dioda emiţătore din stânga detectează un obstacol, se va auzi un singur sunet.
Motorul din dreapta va merge în marşarier. Apoi ambele motoare vor merge înainte.
c) Când dioda emiţătore din mijloc detectează un obstacol, se vor auzi două sunete.
Ambele motoare vor merge în marşarier. Apoi ambele motoare vor merge înainte.
d) Când toate trei diode emiţătore din mijloc detectează obstacole, se vor auzi trei sunete.
Ambele motoare vor merge în marşarier. Apoi ambele motoare vor merge înainte.
2.2.4. Robotul Umanoid Maxibot
Robotul Maxibot este un robot mobil pășitor programabil care are posibilitatea de a
comunica cu alţi roboţi din familia sa cu ajutorul unui sistem senzorial infraroşu.
Programarea robotului se realizează cu ajutorul modulului de programare amplasat în
partea din spate a acestuia. Acest modul are patru taste prin apăsarea cărora se determină câţi
paşi se fac înainte, înapoi, la stânga sau la dreapta. Dezavantajul acestui tip de robot este că nu
poate opera decât în spaţii de lucru unde se cunoaşte poziţia obstacolelor.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
20
2.2.5. Robotul păşitor Hexbug Delta
Robotul Hexbug Delta este un robot păşitor care reacţionează la atingere. Antenele lui
sunt senzori tactili care modifică sensul de mers la atingere. Când antena din dreapta este
atinsă, robotul virează spre dreapta şi când antena din stânga este atinsă, robotul virează spre
stânga.
Robotul este pus în mişcare de picioarele din mijloc. Celelalte patru picioare oferă
stabilitate în timpul deplasării. Când nici una din antene nu este atinsă, direcţia de deplasare
este înainte.
2.2.6. Vehicul telecomandat
La acest tip de vehicul orientarea se face de la distanţă prin telecomandă în funcţie de
datele primite de la un senzor ultrasonic.
Senzorul ultrasonic DT020-1 a fost montat în partea frontală a vehiculului şi sistemul de
achiziţie de date MultiLogPRO în partea din spate. Conexiunea cu calculatorul a sistemului de
achiziţie se poate realiza cu cablu sau wireless (reţea fără fir).
2.3. Cercetări privind sistemul de locomoție al roboților mobili
Locomoţia este procesul care îi permite robotului mobil să se deplaseze în mediu prin
acţionarea anumitor forţe asupra sa. Sistemul de locomoţie are un rol hotărâtor în atingerea
scopului propus prin funcţia robotului mobil. Contribuie la acest lucru atât varianta de realizare
a locomoţiei (roată, șenile, picior etc.), cât şi aspectele structurale (grade de mobilitate,
orientare, manevrabilitate) ale variantei admise pentru robot.
Pentru a se determina influența sistemului locomotor asupra orientării roboților în spațiul
de lucru s-au efectuat teste cu roboți mobili cu sisteme locomotoare cu roți, șenile și roboți
pășitori.
2.3.1. Determinarea abaterii liniare de la traiectorie
Pentru determinarea abaterii de la traiectorie a roboților testați s-a amenajat un traseu cu
benzi de mărimi și culori diferite. Banda îngustă din mijloc are culoarea verde și lățimea de 10
mm, în stânga și dreapta benzile au culoarea galbenă cu lațimea de 15 mm, acestea fiind
mărginite de benzile de culoare roșie cu lățimea de 25 mm.
În vederea determinării abaterii unghiulare de la traiectorie a fost proiectat un dispozitiv
care rulează pe șine și are încorporat un senzor care măsoară viteza unghilară. Senzorul montat
pe dispozitiv este conectat la robotul testat și la sistemul de achiziție de date MultilogPro,
furnizând în timp real valorile măsurate. Mișcarea dispozitivului va fi rectilinie și forța de
frecare dintre roți și cele două șine va avea valori foarte reduse [O1]. În figura 2.3 este
prezentată o captură dintr-o pagină a software-ului Pro Engineering în care au fost proiectate
roțile dispozitivului.
Fig. 2.3. Proiectarea roților dispozitivului de determinare a abaterii unghilare

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
21
Senzorul utilizat DT148A, monitorizează poziția unghiulară și indică direcția deplasării,
valorile fiind pozitive sau negative. Măsurându-se valoarea unghiului la abaterea de la
traiectorie, semnul nu are relevanță. Senzorul pentru măsurarea vitezei unghiulare prezintă un
codificator optic, legat de arborele principal al senzorului. Acesta produce 1440 impulsuri
pentru fiecare rotire completă a roții senzorului. Un microprocesor din interior contorizează
aceste impulsuri și produce o tensiune de ieșire între 0V și 5V, corespunzător numărului de
impulsuri. Acuratețea senzorului este de 0,125o având o rată de eșantionare de 10 probe pe
secundă.
Fig. 2.4. Sistem de determinare a abaterii unghiulare
În figura 2.4 este prezentat întregul sistem obținut în vederea determinării abaterii
unghiulare la deplasarea roboților mobili. Cu acesta au fost testați roboții Spy Video TRAKR
(șenile), Pro Bot 128 (roți), mini-vehiculul teleghidat (roți) și Maxibot (pășitor). Senzorul a fost
atașat fiecărui robot în parte printr-o prindere fixă.
Fig. 2.5. Conectarea dispozitivului la roboții mobili
În tabelul 2.1 sunt prezentate valorile obținute în urma măsurătorilor cu dispozitivul
realizat. Valorile unghiurilor măsurate au fost citite din 200 în 200 mm pe o distanță de 1,8 m.
Tabelul 2.1. Abaterea unghiulară de la traiectorie
Distanța
parcursă
Locomoție cu roți Locomoție cu
șenile Pășitor
Robot Pro Bot
128
Mini-vehicul
teleghidat
Robot Spy
Video TRAKR Robot Maxibot
Abaterea unghiulară
d β 1 β 2 β 3 β 4
[mm] grade grade grade grade
200 0,92 1,20 0,80 1,58
400 1,75 2,52 1,52 2,89
600 2,43 3,49 2,06 5,20
800 3,35 4,32 2,81 6,98
1000 3,95 4,94 3,32 8,59
1200 4,54 5,77 3,98 10,98
1400 5,23 6,79 4,37 13,58
1600 6,08 7,44 5,03 17,54
1800 6,33 8,14 5,46 24,54

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
22
În urma analizei datelor obținute se evidențiază valorile obținute pentru robotul pășitor
Maxibot. Abaterea unghilară de la traiectorie este mult mai mare în comparație cu abaterile
determinate pentru ceilalți roboți.
În vederea determinării abaterii liniare de la traiectorie, fiecărui robot în parte i s-a
măsurat și însemnat centrul de simetrie. Abaterea liniară de la traiectorie a fost detreminată
prin măsurarea distanței dintre axa traseului și centrul de simetrie al robotului. Cât timp centrul
de simetrie al fiecărui robot se încadrează în banda verde abaterea este neglijabilă, măsurarea
acesteia făcându-se pe benzile de culoare galbenă și roșie.
Deplasarea roboților a fost filmată cu o cameră montată pe tavanul încăperii unde a fost
amenajat spațiul de lucru. Astfel, pe baza filmării s-a determinat cu precizie abaterea liniară la
fiecare 200 mm dintr-o distanță totală de 1800 mm (1,8m). În tabelul 2.2 sunt pezentate
valorile abaterii liniare determinate pentru cei șase roboți mobili.
Tabelul 2.2. Abaterea liniară de la traiectorie
Distanța
parcursă
Locomoție cu roți Locomoție
cu șenile Pășitori
Robot Pro
Bot 128
Mini-
vehicul
teleghidat
Robot
KSR4-
ESCAPE
Robot Spy
Video
TRAKR
Robot
Maxibot
Robot
Hexbug
Delta
Abaterea liniară
d d1 d2 d3 d4 d5 d6
[mm] [mm] [mm] [mm] [mm] [mm] [mm]
200 3,2 4,2 5,2 2,8 5,5 5,8
400 6,1 8,8 11,1 5,3 10,1 12,3
600 8,5 12,2 15,8 7,2 18,2 22,2
800 11,7 15,1 23,6 9,8 24,5 28,9
1000 13,8 17,3 28,8 11,6 30,2 36,3
1200 15,9 20,2 32,3 13,9 38,8 48,2
1400 18,3 23,8 38,6 15,3 48,3 63,3
1600 21,3 26,1 45,8 17,6 63,2 82,2
1800 22,2 28,6 52,3 19,1 91,3 112,1
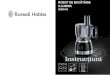
Fig. 2.6. Abaterea liniară pentru cei șase roboți

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
23
În figura 2.6 este prezentată variația abaterii de la traiectorie în funcție de distanța
parcursă. Se observă că la roboții Robot Pro Bot 128, Mini-vehicul teleghidat și Spy Video
TRAKR abaterea a crescut liniar cu distanța parcursă. La roboții pășitori se observă că valorile
abaterii au crescut exponențial cu distanța parcursă.
Fig. 2.7. Distanța parcursă de roboți pe benzile de culori
În figura 2.7 este prezentată distanța parcursă de cei șase roboți mobili pe cele trei benzi
de culori diferite. Se observă că robotul Spy Video TRAKR a parcurs cea mai mare distanță pe
culoare verde față de ceilalți roboți și a fost singurul care nu a trecut pe banda de culoare roșie.
Robotul pășitor Hexbug Delta a parcurs cea mai mică distanță pe culoare verde și cea mai mare
distanță pe culoare roșie.
2.3.2. Determinarea accelerației și vitezei roboților în funcție de sistemul de locomoție
Pentru determinarea performanţelor mecanice ale roboţilor mobili s-au efectuat teste în
trei spaţii de lucru cu proprietăţi diferite. Astfel s-a urmărit comportamentul roboţilor din punct
de vedere al locomoţiei pe parchet, pe covor şi pe nisip. Spațiile de lucru amenajate în vederea
măsurătoriilor sunt prezentate în figura 2.8.
Fig. 2.8. Spațiile de lucru amenajate: a) parchet, b) covor, c) nisip
Roboţii aleşi pentru teste au fost Mini-vehiculul teleghidat (sistem locomotor cu roți) şi
Spy Video TRAKR (sistem locomotor cu șenile). Roboţii au fost echipaţi cu senzorul
ultrasonic DT020-1 şi cu sistemul de achiziţie de date MultiLogPRO care rulează conectat la
PC sau ca un dispozitiv de sine stătător.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
24
Senzorul ultrasonic DT020-1 poate fi setat pentru măsurarea distanţei, a vitezei și a
acceleraţiei individual sau concomitent. Acesta poate fi calibrat dacă măsurătorile sunt
imprecise. Astfel s-au determinat viteza şi acceleraţia roboţilor cu o rată de eşantionare de zece
probe pe secundă.
Fig. 2.9. Testarea sistemului de locomoţie al roboţilor
În urma testelor efectuate cu Mini-vehiculul teleghidat se observă că atât viteza, cât și
accelerația au valori mai mici la deplasarea acestuia pe nisip. Au fost analizate datele obținute
la demarajul vehiculului, diferențele mari fiind înregistrate în primele secvențe ale deplasării.
Fig. 2.10. Variația vitezei la deplasarea mini-vehicului teleghidat pe parchet, covor și nisip
În urma testelor efectuate cu robotul Spy Video TRAKR se observă că atât viteza, cât și
accelerația au valori mai apropiate la deplasarea în cele trei medii față de valorile obținute cu
vehiculul cu roți. Totuși, valorile minime și în acest caz au fost obținute la deplasarea robotului
pe nisip.
Fig. 2.11. Variația vitezei la deplasarea robotului cu șenile pe parchet, covor și nisip

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
25
2.4. Cercetări privind detecția obstacolelor din spațiul de lucru
Evitarea obstacolelor este una din cele mai importante probleme pe care se pun la
deplasarea unui robot mobil într-un spațiu de lucru. Evitarea este o consecință a detecției
obstacolelor și oprirea sau schimbarea direcției de deplasare a roboților mobili, cu scopul de a
evita coliziunile.
În vederea observării comportamentului roboților într-un spațiu de lucru cu obstacole
fixe, s-au testat trei roboți cu grade de autonomie diferite: robotul Spy Video TRAKR
(semiautonom), robotul Maxibot (semiautonom) și robotul Pro Bot 128 (autonom). Robotul Spy Video TRAKR are un grad de autonomie scăzut, fiind inițial programat și
ghidat de operatorul uman pentru parcurgerea traseului. Acest robot are posibilitatea de a
memora mișcările efectuate pentru parcurgerea unui traseu și apoi de a repeta traseul parcurs
fără ajutorul operatorului uman.
Robotul Maxibot, are un grad de autonomie scăzut, având posibilitatea de a sesiza și evita
obstacolele cu ajutorul sistemului de detecție cu senzor în infraroșu, dar fiind programat în
prealabil de operatorul uman. Programarea se face analogic prin alegerea mișcărilor robotului
cu ajutorul modulului de programare amplasat în partea din spate a acestuia.
Robotul Pro Bot 128 are un grad de autonomie ridicat având posibilitatea de a sesiza și
evita obstacolele cu ajutorul sistemului senzorial fără intervenția operatorului uman. Pentru
detecția obstacolelor și orientarea în spațiul de lucru robotul a fost programat să utilizeze
sistemul senzorial infraroşu anti-coliziune.
Prin testarea celor trei roboți se urmărește comportamentul acestora din punct de vedere
al distanței parcurse dintre un punct de pornire și un punct țintă și a modului de evitare a
obstacolelor. Pentru aceasta s-au amenajat două spații de lucru, unul cu trei obstacole fixe și
altul de tip labirint.
În vederea stabilirii cu precizie a traseului parcurs de fiecare robot, aceștia au fost dotați
cu un sistem de trasare a marcajului. Acest sistem folosește un nuanțator care va trasa o linie în
timpul deplasării robotului. În figura 2.12 este prezentat locul de amplasare a sistemului de
trasare a marcajului pentru evidențierea traseului. Se observă că pentru o trasare precisă,
sistemul a fost aplasat pe ambele picioare ale robotului Maxibot, la robotul Spy Video TRAKR
sistemul a fost aplasat în centrul de simetrie la o distanță egală față de puntea față și spate și la
robotul Pro Bot 128 la în centrul axului sistemului de locomoție.
Fig. 2.12. Amplasarea sistemului de trasare a marcajului pentru evidențierea traseului parcurs
de roboții mobili în spațiul de lucru
Traiectoria descrisă de fiecare robot testat a fost împărțită în segmente drepte în vederea
determinării distanței parcurse. Segmentele de linie au fost măsurate și distanța parcursă de
fiecare robot a fost calculată adunând valorile acestora.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
26
2.4.1. Orientarea roboților într-un spațiu de lucru cu obstacole fixe
Pentru studierea comportamentului roboților mobili aleși pentru testare a fost amenajat un
spațiu de lucru cu trei obstacole fixe de diferite forme și dimensiuni. În spațiul creat s-a ales un
punct de start și unul de sosire în așa fel încât fiecare robot să întâlnească obstacolele în timpul
deplasării.
Înainte de testarea roboților a fost determinată traiectoria ideală ținând cont de
dimensiunile robotului cel mai mare idealăd 1,8[m] .
Fig. 2.13. Deplasarea roboților în spațiul de lucru cu obstacole fixe
În figura 2.13 este prezentată traiectoria descrisă de roboții Spy Video TRAKR, Maxibot
și Pro Bot 128 în spațiul de lucru cu trei obstacole fixe. Pentru robotul Spy Video TRAKR linia
trasată de nuanțatorul montat pe robot a fost împărțită în 13 segmente. Distanța parcursă a fost
determinată prin adunarea valorilor segmentelor, având valoarea d1= 1,979 m. Se observă că
robotul a parcurs o distanță cu 0,179 m mai mare față de traiectoria ideală. Pentru robotul
Maxibot linia trasată de nuanțatorul montat pe robot a fost împărțită în 25 segmente drepte.
Distanța parcursă a fost determinată prin adunarea valorilor segmentelor, având valoarea d2=
2,136 m. Robotul a parcurs o distanță cu 0,336 m mai mare față de traiectoria ideală. Pentru
robotul Pro Bot 128 linia trasată a fost împărțită în 38 segmente. Se observă că acest robot a
efectuat, față de ceilalți roboți și mișcări înapoi pentru evitarea obstacolelor. Distanța parcursă
a fost determinată prin adunarea valorilor segmentelor, având valoarea d3= 3,038 m, din care
0,422 m au fost parcurși la mersul înapoi. Robotul a parcurs o distanță cu 1,238 m mai mare
față de traiectoria ideală.
În urma testelor efectuate se poate spune că roboții cu grad de autonomie scăzut au
parcurs o distanță apropiată de valoare față de traiectoria ideală, fără a efectua mișcări înapoi
pentru evitatarea obstacolelor.
Tabelul 2.3. Distanțele parcurse în spațiul de lucru cu obstacole fixe
Tipul robotului
mobil
Distanța totală
parcursă
Distanța
parcursă la
mers înainte
Distanța
parcursă la
mers înapoi
Diferența față
de distanța
ideală
[m] [m] [m] [m]
Spy Video
TRAKR 1,979 1,979 0 0,179
Maxibot
2,136 2,136 0 0,336
Pro Bot 128
3,038 2,616 0,422 1,238

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
27
2.4.2. Orientarea roboților într-un spațiu de lucru de tip labirint
Pentru studierea comportamentului roboților mobili într-un labirint a fost amenajat spațiul
de lucru ca în figura 2.14. Asemeni studiului anterior, în spațiul creat s-a ales un punct de start
și unul de sosire.
Fig. 2.14. Spațiu de lucru de tip labirint
La crearea spațiului de lucru au fost utilizate plăci de lemn cu aceeași textură, având
grosimea de 2 cm, înălțimea de 0,3 m și lungimi cuprinse între 0,2 și 1,2 m. La alegerea
acestora s-a avut în vedere ca înălțimea să fie mai mare față de înălțimea la care se află
sistemul senzorial al fiecărui robot, ca în figura 2.15. Astfel, linia de culoare roșie care
reprezintă nivelul la care este amplasat sistemul senzorial trebuie să se afle între liniile galbene
care delimitează placa de lemn utilizată.
Fig. 2.15. Alegerea înălțimii elementelor utilizate la crearea spațiului de lucru de tip labirint
Înainte de testarea roboților, la fel ca la studiul prezentat anterior, a fost propusă o
traiectorie ideală ținând cont de dimensiunile robotului cel mai mare 4,3[m].idealăd
Fig. 2.16. Deplasarea roboților în spațiul de lucru de tip labirint

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
28
În figura 2.16 este prezentată traiectoria descrisă de roboții Spy Video TRAKR, Maxibot
și Pro Bot 128în spațiul de lucru de tip labirint. Pentru robotul Spy Video TRAKR linia trasată
de nuanțatorul montat pe robot a fost împărțită în 46 segmente. Distanța parcursă a fost
determinată prin adunarea valorilor segmentelor, având valoarea d1= 5,009 m. Se observă că
robotul a parcurs o distanță cu 0,709 m mai mare față de traiectoria ideală. Pentru robotul
Maxibot linia trasată de nuanțatorul montat pe robot a fost împărțită în 65 segmente. Distanța
parcursă a fost determinată prin adunarea valorilor segmentelor, având valoarea d2= 4,598 m.
Robotul a parcurs o distanță cu 0,298 m mai mare față de traiectoria ideală. Pentru robotul Pro
Bot 128 linia trasată a fost împărțită în 57 segmente drepte. Se observă, la fel ca la studiul
efectuat în spațiul de lucru cu obstacole fixe că acest robot a efectuat și mișcări înapoi în
vederea evitării obstacolelor. Distanța parcursă a fost determinată prin adunarea valorilor
segmentelor, având valoarea d3= 9,739 m, din care 2,338 m au fost parcurși la mersul înapoi.
Robotul a parcurs o distanță cu 5,439 m mai mare față de traiectoria ideală.
În urma testelor efectuate în spațiul de lucru de tip labirint se poate spune că roboții cu
grad de autonomie scăzut au parcurs o distanță mult mai mică în comparație cu robotul Pro Bot
128. Acesta a parcurs o distanță mai mare decât dublul distanței ideale.
Tabelul 2.4. Distanțele parcurse în spațiul de lucru de tip labirint
Tipul robotului
mobil
Distanța totală
parcursă
Distanța
parcursă la
mers înainte
Distanța
parcursă la
mers înapoi
Diferența față
de distanța
ideală
[m] [m] [m] [m]
Spy Video
TRAKR 5,009 5,009 0 0,709
Maxibot
4,598 4,598 0 0,298
Pro Bot 128
9,739 7,401 2,338 5,439
Robotul Spy video TRAKR, având dimensiuni mai mari, a parcurs o distanță mai mare în
comparație cu robotul Maxibot, fiind nevoit să parcurgă o distanță mai mare pentru evitarea
obstacolelor.
2.5. Concluzii
Studiul experimental asupra comportamentului roboților mobili în procesul de percepere
a obstacolelor, impune alegerea unor obstacole de dimensiuni, forme şi materiale diferite. De
asemenea, este deosebit de importantă şi alegerea spaţiului de lucru în care vor fi folosite
obstacolele. Acesta ar trebui să fie un spaţiu închis unde pot fi controlaţi parametrii atmosferici,
cum ar fi temperatura, umiditatea şi nivelul de zgomot.
Din punct de vedere al abaterii de la traiectorie, diferențele mai mari au fost obținute cu
roboții pășitori. Pentru corectarea modului de deplasare a robotului pășitor Maxibot, la
programarea acestuia, după patru pași înainte se va face un pas la dreapta. Astfel traiectoria
acestuia se va corecta, robotul având inițial tendința de a se deplasa spre stânga datorită
imperfecțiunii sistemului locomotor.
La deplasarea roboților pe suprafețe diferite, valorile obținute cu robotul cu sistem de
locomoție cu șenile au fost superioare celor obținute cu vehiculul cu sistem de locomoție cu
roți.
În urma testelor efectuate în spațiile de lucru amenajate se observă ca distanța cea mai
mare parcursă între un punct de start și unul de sosire a fost obținută cu robotul care prezintă
cel mai ridicat grad de autonomie. Diferențe sesizabile au apărut și în funcție de dimensiunile
roboților.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
29
CAPITOLUL 3. CERCETĂRI PRIVIND MĂSURAREA DISTANȚEI CU
SENZORII ULTRASONICI
3.1. Considerații teoretice privind transmiterea ultrasunetelor
Ultrasunetele reprezintă un caz particular al undelor acustice şi sunt vibraţii mecanice cu
frecvenţe mai mari de 20 000 Hz [H5]. Aspectele dimensionale legate de propagarea
ultrasunetelor sunt [A3]:
lungimea de undă
viteza de propagare
atenuarea atmosferică
reflectivitatea obiectelor ţintă
atenuarea geometrică
frecvenţa
diagrama de directivitate
efectul Doppler
influenţa zgomotelor
Lungimea de undă
În fizică, lungimea de undă este un parametru de bază al oricărui fenomen ondulatoriu
care se propagă în spaţiu şi anume reprezintă distanţa parcursă de undă pe durata unei oscilaţii,
ori distanţa dintre două puncte din spaţiu între care defazajul relativ al oscilaţiilor este de 2π
radiani [L1].
Astfel de fenomene pot fi de exemplu undele electromagnetice (lumina, undele radio etc.)
și undele mecanice (sunetele, undele seismice etc.). Prin extensie, pentru orice fenomen care se
repetă în spaţiu, perioada de repetare se poate numi lungime de undă. De exemplu în
matematică dacă o funcţie sinusoidală are ca argument poziţia în spaţiu, atunci distanţa la care
funcţia îşi repetă valorile se numeşte lungime de undă [M3].
Lungimea de undă este legată de viteza de propagare a undei respective şi de frecvenţa ei
prin relaţia:
vv T
f [m], (3.1)
λ = lungimea de undă;
v = viteza de propagare a undei în mediul respectiv;
f = frecvenţa undei, inversa perioadei temporale;
T = perioada undei.
Viteza de propagare a sunetului
Viteza sunetului este unul dintre parametrii care descriu propagarea sunetului printr-un
mediu. Această viteză depinde de proprietăţile mediului de propagare, în particular de
elasticitatea şi densitatea acestuia.
În aer şi alte gaze viteza sunetului depinde în primul rînd de temperatură. De exemplu, la
0 °C viteza sunetului este de 331,5 m/s, iar la 20 °C aproximativ 343,4 m/s. Presiunea are un
efect mic, iar umiditatea nu are aproape nici un efect asupra vitezei [U1].
Pentru aer, formula aproximativă de mai jos permite calculul vitezei de propagare a
sunetelor în funcţie de temperatură, pentru un domeniu de temperaturi în jur de 0 °C:
aerc 331,5 0,607 t [m/s], (3.2)
t = temperatura aerului exprimată în grade Celsius.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
30
Această formulă este aproximaţia liniară (primii doi termeni din seria Taylor) a funcţiei:
aer
tc 331,5 1
237,15 [m/s], (3.3)
care permite calculul mai exact al acestei dependenţe în ipoteza că variaţia cu temperatura a
capacităţii calorice a aerului este nulă. Erorile derivate din această ipoteză sunt mici în
condiţiile temperaturilor obişnuite din atmosferă, dar cresc în special la temperaturi înalte.
Coeficientul pentru aproximaţia liniară se obţine astfel:
0
0
1 1c 331,5 0,607
2 T 2 273,15
. (3.4)
Atenuarea atmosferică
Pe parcursul propagării ultrasunetelor, o parte din energia acestora este absorbită de
mediu. Puterea semnalului acustic care pleacă de la o sursă scade conform cu legea inversului
pătrat [N2].
2
0
d4
II
2W m ,
(3.5)
unde:
I = intensitatea (puterea per suprafaţă) la distanţa d;
I0 = intensitatea maximă (iniţială);
d = distanţa.
Reflectivitatea obiectelor ţintă
Directivitatea suprafeţei obiectului ţintă determină cât din energia reflectată e direcţionată
înapoi spre receptor. Din moment ce majoritatea obiectelor împrăştie semnalul într-un mod
izotropic, ecoul se disipă din nou în concordanţă cu legea inversului pătrat, introducând un
termen adiţional 4d2 la numitor faţă de forma ecuaţiei precedente a intensităţii. În plus, un nou
factor Kr, trebuie introdus la numărător în raport cu reflexivitatea obiectului ţintă [T3].
4
d2
0r
d16
eIKI
, (3.6)
unde:
Kr = coeficient de reflecxie.
Cu cât e mai mare dezacordul între impedanţele din cele două medii, cu atât mai multă
energie va fi reflectată înapoi la sursă.
Atenuarea geometrică
Creşterea suprafeţei frontului de undă pe parcursul propagării ultrasunetelor duce la
amortizarea intensităţii acestora. Pentru o sursă izotropică care emite un front de undă sferică,
relaţia de calcul este [L1]:
0
2
PP
d
[W] , (3.7)

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
31
P = puterea primită de corp pe unitatea de suprafaţă;
P0= puterea emisă;
dω = unghiul solid dat de relaţia cos12 d ;
= depărtarea faţă de sursă.
Diagrama de directivitate
Sensibilitatea unui senzor ultrasonic nu este uniformă, ci consistă dintr-un lob principal şi
câţiva lobi secundari mai mici. De asemenea, această sensibilitate diferă de la un senzor la altul
[N2].
Pentru distanţe da propagare mai mari decât D2/2
.λ, forma diagramei de directivitate
depinde de diametrul membranei sursei emiţătoare D şi de lungimea de undă. Dacă λ<D,
unghiul de deschidere θ al lobului principal este dat de relaţia [N2]:
csin
2 D D f
. (3.8)
Pentru valori mici ale unghiului θ se face aproximaţia următoare:
sin2 2 D
. (3.9)
Efectul Doppler
Efectul Doppler constă în variaţia frecvenţei unei unde emise de o sursă de oscilaţii, dacă
aceasta se află în mişcare faţă de receptor. Efectul Doppler poate fi constatat atât în cazul
undelor electromagnetice (inclusiv lumina), cât şi în cazul undelor elastice (inclusiv sunetul).
Frecvenţa măsurată creşte atunci când sursa se apropie de receptor şi scade când sursa se
depărtează de receptor [H5].
R E E
vf f f
c , (3.10)
fR – frecvenţa undei receptate;
fE – frecvenţa undei emise;
v – viteza de deplasare a robotului;
c – viteza de propagare a undei în aer.
Influenţa zgomotului
În general, două feluri de zgomote pot afecta performanţele senzorilor ultrasonici:
zgomotul mediului înconjurător şi zgomotul auto-generat.
3.1.1. Concluzii
Metoda de determinare a distanței cu ajutorul ultrasunetelor este aplicată în multe cazuri
la detecția obstacolelor în cazul navigației roboților mobili. Însă trebuie luate în considerare
influnțele factorilor care pot perturba transmiterea sunetului și anume: viteza de propagare a
sunetului, atenuarea atmosferică, reflectivitatea obiectelor ţintă, atenuarea geometric și
zgomotele din mediul ambiant.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
32
3.2. Cercetări experimentale privind comportamentul senzorilor ultrasonici în procesul
de detecție
3.2.1. Introducere
Performanţele roboţilor mobili sunt dependente de scopul şi obiectivele pe care le au de
îndeplinit, dar şi de spaţiul în care îşi desfăşoară activitatea. Alegerea sistemului senzorial
potrivit necesită o analiză serioasă a spaţiului în care robotul mobil va opera şi a
particularităţilor acestuia, adică a obstacolelor (obiectelor), care pot fi mobile sau fixe.
În urma măsurătorilor efectuate cu diferiţi senzori ultrasonici asupra unor multiple tipuri
de obstacole, se vor stabili dependenţele între acestea şi diferitele posibilităţi de detecţie.
3.2.2. Senzorii ultrasonici utilizaţi la cercetările experimentale
Pentru studiul experimental au fost utilizați trei senzori cu domenii de măsurare diferite și
anume:
Senzorul utrasonic DT020-1;
Senzorul utrasonic FESTO;
Senzorul ultrasonic Parallax PING.
Senzorul utrasonic DT020-1 are un domeniu mare de măsurare, cuprins între 0,4m și
10m, senzorul FESTO un domeniu mic de măsurare, cuprins între 0,15m și 0,5m și senzorul
Parallax PING un domeniu cuprins între 0,2m și 3m.
3.2.3. Erori de măsurare
La măsurătorile efectuate cu senzorii ultrasonici, la fel ca la orice tehnică de măsurare, s-
a ținut cont de erori.
Efectuarea măsurătorilor produce erori care au aceeași mărime când procesul de
măsurare se efectuează în condiții identice, sau erori care au mărimi variabile, variația acestora
depinzând de anumite legi de variație. Erorile de măsurare se clasifică în:
erori grosolane care provin din citiri eronate sau din neatenție și trebuie eliminate;
erori sistematice care apar din cauza unor caracteristici constructive ale
echipamentelor,sau pot fi produse de factori externi (temperatură, presiune, umiditate,
zgomote etc);
erori aleatoare care apar ca urmare diversității proceselor și fenomenelor precum și a
interacțiunilor experimentului cu alte procese și fenomene ce se desfasoară simultan.
În procesul de analiză a datelor provenite din măsurătorile efectuate cu senzorii
ultrasonici se vor calcula eroarea absolută, eroarea relativă și se va determina eroarea maximă
admisibilă. Eroarea absolută este dată de relația:
m rx x x , (3.11)
unde xm este valoarea obținută prin măsurare și xr este valoarea reală.
Eroarea relativă este dată de relația:
100r
x
x
, (3.12)
unde ∆x este eroarea absolută și xr este valoarea reală. Eroarea relativă este exprimată în
procente.
Eroarea maximă admisibilă se determină prin alegerea valorii maxime a erorii absolute.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
33
maxadmx x . (3.13)
Astfel pentru măsurătorile de distanță efectuate cu senzorii ultrasonici eroarea absolută va
avea forma:
m rd d d , (3.14)
unde dm este valoarea distanței obținută prin măsurare și dr este valoarea reală a distanței.
Eroarea relativă va fi:
100r
d
d
, (3.15)
unde ∆d este eroarea absolută și dr este valoarea reală a distanței.
Eroarea maximă admisibilă se va nota astfel:
maxadmd d . (3.16)
3.2.4. Determinarea distanței dintre senzorii ultrasonici și obstacole
Primele măsurători cu senzorii ultrasonici au fost efectuate față de un obstacol cu
suprafața plană poziționat la o distanță egală cu jumătatea domeniului de detecție a fiecărui
senzor.
Senzorul ultrasonic DT020-1 are un domeniu mare detecție de maxim 10 metri, astfel că
obstacolul a fost amplasat la o distanță de 5m (5000 mm).
Senzorul FESTO are un domeniu mare detecție de maxim 0,5 metri, astfel că obstacolul a
fost amplasat la o distanță de 0,25m (250mm).
Senzorul Parallax PING are un domeniu mare detecție de maxim 3 metri, astfel că
obstacolul a fost amplasat la o distanță de 1,5m (1500mm).
Fig. 3.1. Amplasarea obstacolului față de senzori

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
34
S-au efectuat câte zece măsurători la aceeași distanță notată cu dr pentru fiecare senzor în
parte, astfel determinându-se câte zece valori ale distanței măsurate dm. Timpul de răspuns
teoretic al fiecărui senzor a fost calculat cu relația:
0
2 r
aer
dt
c
[µs] (3.17)
și timpul de răspuns real a fost calculat în funcție de distanța măsurată astfel:
2 m
aer
dt
c
[µs] (3.18)
Timpul de răspuns al senzorului este dependent de viteza de propagare a sunetului în
mediul în care se fac măsurărorile, în cazul de față acesta fiind aerul. Viteza de propagare a
sunetului în aer se determină cu relația (3.2).
Fig. 3.2. Program de calcul a timpului de răspuns
Pentru calcularea timpului de răspuns în funcție de distanța măsurată și a vitezei sunetului
în aer în funcție de temperatură, a fost creat un program de calcul în limbajul de programare
Microsoft Visual Basic 2010 Expres. Pentru calculul timpului de răspuns se introduc distanța și
temperatura mediului ambiant și prin apăsarea butonului de calcul sunt calculate viteza
sunetului în aer și timpul de răspuns al senzorului. În cazul în care nu se introduce valoarea
temperaturii, timpul de răspuns nu este calculat.
În figura 3.3 este prezentat un exemplu în care s-au calculat timpul de răspuns și viteza de
propagare a sunetului în aer pentru o distanță de 5 metri și o temperatură de 24,8 grade Celsius,
valorile calculate fiind afișate cu patru zecimale exacte.
Fig. 3.3. Exemplu de calcul a timpului de răspuns cu ajutorul programului propus
Măsurătorile s-au realizat la o temperatură taer = 24,8 oC, determinată cu anemometrul
portabil. În acest caz, viteza de propagare a sunetului are valoarea caer = 346,55 m/s.
Cu relațiile (3.14), (3.15) și (3.16) s-au detereminat eroarea absolută, eroarea relativă și
eroarea maximă admisibilă.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
35
În toate situațiile s-a observat că valoarea erorii relative nu depășește 0,5 %. În aceste
condiții se pot face măsurători de distanță cu cei trei senzori, fără a se face o etalonare a
acestora în prealabil.
3.2.4.1. Determinarea distanței față de obstacole de dimensiuni diferite
Principala problemă a senzorilor este detecția obstacolelor de dimensiuni mici. La fel și
senzorii ultrasonici nu detectează obiecte de dimensiuni foarte mici (fig 3.4.b.) și dacă le
detectează, distanța determinată poate avea valori diferite de distanța reală față de senzor
[T11].
Fig. 3.4. Detecția obstacolelor de dimensiuni mici
La determinarea distanței față de obstacole de dimensiuni diferite s-a utilizat senzorul
ultrasonic Parallax PING, în condiții de presiune atmosferică de 714,5 mmHg şi temperatură de
22,5 oC (295,65 K). În acest caz, viteza de propagare a sunetului are valoarea caer = 345,16 m/s.
Obstacolele folosite la testarea senzorului ultrasonic au fost montate pe platforma mobilă
a subansamblului de ghidare cu potenţiometru liniar. S-au folosit obstacole plane confecţionate
din aluminiu având înălțimea de 150 mm și lăţimea de 20 mm, 40 mm şi respectiv de 60 mm.
Distanţele la care a fost poziţionat obstacolul variază crescător de la 100 mm la 1000 mm, din
100 în 100 mm.
Fig. 3.5. Variația erorii relative pentru obstacolele de diferite dimensiuni
Se observă că valoarea medie a erorii relative crește invers proporțional cu lățimea
obstacolului, aceasta fiind de două ori mai mare la obstacolul cu lățimea de 20 mm față de cel
cu lățimea de 60 mm.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
36
3.2.4.2. Determinarea distanței față de obstacole de forme diferite
Asemeni cazurilor prezentate anterior, o altă problemă a senzorilor apare la detecția
obstacolelor de diferite forme. Distanța măsurată dintre senzor și obstacol poate avea valori
diferite funcție de forma obstacolului.
Pentru observarea influenţei formei obstacolului, s-au efectuat măsurători de distanţă
între senzorul ultrasonic DT020-1 şi trei obstacole cu secțiuni transversale diferite având
dimensiunile prezentate în figura 3.6. Acestea s-au poziţionat pe rând la aceleaşi distanţe
cuprinse între 0,2 m şi 2 m faţă de senzorul ultrasonic [T10].
Fig. 3.6. Obstacolele de diferite forme
Pentru simplificarea exprimării, obstacolul cu secțiunea un dreptunghi a fost denumit
obstacolul 1, cel cu secțiunea un triunghi a fost denumit obstacolul 2 și obstacolul cilindric a
fost denumit obstacolul 3.
Fig. 3.7. Măsurarea distanţei până la obstacolele de diferite forme

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
37
Măsurătorile cu senzorul ultrasonic DT020-1 s-au efectuat în condiții de presiune
atmosferică de 711,4 mmHg şi temperatură de 20,6 oC (293,75 K). În acest caz, viteza de
propagare a sunetului are valoarea caer = 344 m/s.
Se observă că valoarea medie a erorii relative este cea mai mare în cazul obstacolului 2.
De asemenea, valorile distanței măsurate sunt cele mai mari în cazul obstacolului 2, acesta
fiind detectat la o distanță mai mare față de distanța reală. În cazul obstacolului cilindric 3,
valorile distanței măsurate nu diferă mult față de valorile obținute pentru obstacolul 1 [T10].
3.2.4.3. Determinarea distanței față de obstacole din materiale cu texturi diferite
Pe lângă dimensiunile și forma obstacolelor, detecția senzorului ultrasonic poate fi
influențată și de textura materialului din care este confecționat obstacolul.
Pentru observarea influenţei texturii materialului din care este confecționat obstacolul s-
au efectuat măsurători de distanţă între senzorul ultrasonic FESTO şi șase obstacole
confecționate din materiale diferite. Acestea s-au poziţionat pe rând la aceleaşi distanţe
cuprinse între 50 mm şi 250 mm faţă de senzorul ultrasonic [T12]. Materialele din care sunt
confecționate obstacolele folosite pentru determinări sunt:
1. Oţel inoxidabil;
2. Aluminiu;
3. Cupru;
4. Lemn;
5. Cauciuc;
6. Plastic.
Măsurătorile cu senzorul ultrasonic FESTO s-au efectuat în condiții de presiune
atmosferică de 705,6 mmHg şi temperatură de 21,3 oC (294,45 K). În acest caz, viteza de
propagare a sunetului are valoarea caer = 344,43 m/s.
Fig. 3.8. Variația erorii relative pentru diferite materiale
La măsurarea distanței față de obstacolele confecționate din metale, se observă că valorile
măsurate ale distanței sunt mai mari față de distanța reală pentru oțel și cupru (metale cu
suprafeță lucioasă) și mai mici pentru aluminiu (metal cu suprafață mată) [T8].
La măsurarea distanței față de obstacolele confecționate din nemetale, se observă că
valorile măsurate ale distanței sunt mai mari față de distanța reală pentru plastic (metarial cu
suprafeța lucioasă) și mai mici pentru lemn și cauciuc (metariale cu suprafață mată) [T12].

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
38
3.2.4.4. Determinarea distanței față de un obstacol la viteze diferite ale curentului de aer
Probleme la detecția obstacolelor pot apărea și la creșterea vitezei curenților de aer
precum și la schimbarea direcției acestora. Distanța măsurată dintre senzor și obstacol poate
avea valori diferite funcție de mărimea și direcția vitezei.
Pentru observarea influenţei curenților de aer, s-au efectuat măsurători de distanţă între
senzorul ultrasonic DT020-1 şi un obstacol cu suprafață plană, la trei viteze ale curentului de
aer distribuite diferit, una perpendiculară pe unda senzorului, una orientată la 45o față de unda
senzorului și una paralelă cu unda senzorului, având sensul undei emise.
Pentru simularea vântului a fost folosit un ventilator centrifugal cu clapetă de reglare a
debitului de aer în vederea obţinerii diferitelor viteze [B5].
Curentul de aer a fost distribuit în mod diferit pentru a se putea observa influenţele asupra
undei ultrasonice (fig. 3.9) [T3].
Fig. 3.9. Aplicarea vitezelor pe unda ultrasonică
v1 – viteza perpendiculară pe unda ultrasonică;
v2 – viteza orientată la 45o față de unda ultrasonică;
v3 – viteza paralelă cu unda ultrasonică, având sensul undei emise.
La presiunea atmosferică de 715 mmHg şi temperatura de 25,3 oC (298,45 K), viteza de
propagare a sunetului are valoarea caer = 346,86 m/s.
Fig. 3.10. Variația erorii relative pentru vitezele aplicate din diferite direcții

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
39
La aplicarea vitezelor perpendicular pe unda ultrasonică se obsevă că valorile erorii
relative cresc în mod constant direct proporțional cu valorile vitezei curentului de aer.
Diferențele cele mai semnificative au fost obținute la vitezele de 11 respectiv 12 m/s. La
aplicarea vitezelor la 45o față de unda ultrasonică se obsevă că valorile erorii relative au scăzut
în comparație cu cele determinate la aplicarea vitezelor perpendicular pe unda ultrasonică.
Creșterea a fost tot direct proporțională cu valorile vitezei curentului de aer. La aplicarea
vitezelor paralel cu unda ultrasonică se observă că valorile erorii relative au scăzut
semnificativ în comparație cu valorile obținute în cazul celorlalte două situații.
La măsurarea distanței față de un obstacol poziționat la 500 mm față de senzor în condiții
diferite atmosferice (trei direcții diferite ale curenților de aer), se observă că valorile măsurate
ale distanței sunt mai mari față de distanța reală pentru viteza perpendiculară pe unda
ultrasonică și pentru viteza orientată la 45o față de unda ultrasonică și mai mici pentru viteza
paralelă cu unda ultrasonică [T3].
3.2.4.5. Determinarea distanței cu un senzor montat pe o platformă rotativă (radar)
Pentru simularea unui senzor rotativ s-au efectuat măsurători cu senzorul ultrasonic
DT020-1 amplasat pe o platformă mobilă, aceasta având posibilitatea de a se roti cu maxim 90
de grade faţă de un punct fix [T6].
Fig. 3.11. Amplasarea senzorului pe sistemul rotativ
Experimentul s-a desfăşurat timp de 12 secunde pentru fiecare obstacol în parte şi rata de
eşantionare a fost de 10 probe pe secundă. Primul set de măsurători s-a efectuat fără obstacole,
determinându-se dimensiunile spaţiului de lucru.
Pentru simplificarea exprimării, obstacolul cu secțiunea un dreptunghi a fost denumit
obstacolul 1, cel cu secțiunea un triunghi dreptunghic a fost denumit obstacolul 2 și obstacolul
cilindric a fost denumit obstacolul 3. Obstacolele au fost poziționate la aceeași distanță față de
senzorul ultrasonic.
Fig. 3.12. Măsurătorile efectuate cu senzorul montat pe platforma rotativă pentru cele trei tipuri
de obstacole

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
40
În urma măsurătorilor efectuate s-a determinat forma spațiului de lucru cu fiecare
obstacol în parte, așa cum este percepută de senzorul ultrasonic. În figura 3.13 se pot observa
diferențele de percepție ale senzorului ultrasonic [T3].
Fig. 3.13. Diferența dintre formele reale (dreapta) și cele determinate cu radarul (stânga)
Prin suprapunerea celor trei diagrame din figura 3.14 se observă că diferenţe mai mari la
măsurarea distanţei apar în cazul obstacolului 2 cu secțiunea un triunghi dreptunghic.
Fig. 3.14. Diferenţa între valorile obţinute pentru cele trei obstacole
3.2.5. Concluzii
În urma experimentelor efectuate cu cei teri senzori ultrasonici, senzorul DT020-1,
senzorul FESTO și senzorul Parallax PING, se poate spune că precizia determinării distanței
între aceștia și un obiect este influențată atât de dimensiunile, textura și forma acestuia cât și de
parametrii atmosferici în special temperatura și presiunea.
Cu toate acestea, erorile determinate în urma măsurătorilor nu sunt mari, ceea ce
recomandă utilizarea senzorilor ultrasonici la orientarea roboțior sau vehiculelor autonome.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
41
CAPITOLUL 4. MODELAREA SISTEMULUI SENZORIAL AL
ROBOȚILOR MOBILI
4.1. Considerații teoretice privind modelarea rezultatelor obținute experimental
Principala caracteristică a senzorilor este cea legată de relaţia dintre mărimea de intrare x
şi mărimea de ieşire y. Astfel, se poate spune că senzorul este un dispozitiv care recepţionează
şi răspunde la un semnal sau un stimul. Cunoscând valoarea mărimii de ieşire y și folosind
caracteristica statică de transfer a senzorului, se poate calcula valoarea mărimii de intrare x.
Pentru orice senzor, dacă se cunoaşte relaţia de dependenţă intrare-ieşire şi valoarea mărimii de
ieşire, se poate determina valoarea mărimii de intrare.
În general cele două mărimi sunt de natură diferită, mărimea de la intrare fiind o mărime
fizică neelectrică iar mărimea de la ieşire o mărime electricǎ sau o mărime care poate fi
evaluată electric. În cazul sistemelor ideale, mărimea y reprezintă întotdeauna valoarea
generată de senzor pentru stimulul x de la intrare. Dacă se consideră că funcţionarea senzorului
nu este afectată de nici un alt parametru caracteristica de transfer este de forma: y = f(x). În
realitate, pe lângă mărimea fizică de influenţă x, funcţionarea senzorului este afectată de o serie
de parametri perturbatori, care pot proveni din surse externe sau interne. În aceste condiţii,
ecuaţia statică a senzorului devine:
1, ny f (x, ... ) , (4.1)
unde s-au notat cu ϑi parametrii perturbatori.
Parametrii perturbatori au ca şi efect modificarea caracteristicii reale față de caracteristica
ideală. Dacă parametrii de influentă nu sunt modelaţi (adică intervin în ecuaţia senzorului),
influenţa acestora determină o eroare de măsură.
În cazul senzorilor ultrasonici, unde mărimea de intrare este timpul de răspuns t și
mărimea de ieșire este distanța față de obstacol d, relația (1) se poate scrie:
1, nd f (t, ... ) . (4.2)
Mărimea de intrare t se poate obţine pe baza transformatei inverse a caracteristicii statice
d = f(t). Funcţia „g” este funcţia inversă a funcţiei „f”, g = f-1. Altfel spus, dacă funcţia f pentru
un stimul t aplicat la intrare produce ieşirea d, funcţia g = f-1
pentru d produce ieşirea t. Astfel,
pentru un senzorul ultrasonic cu ecuaţia static exprimată analitic cu relaţia 2
t cd t m ,
funcţia inversă este: 2
d
t d sc
.
Considerând viteza sunetului în aer c constantă, functia d = f(t) este o funcție de o singură
variabilă. În baza valorilor determinate experimental se poate obține o relație de dependență
între timpul de răspuns al senzorului ultrasonic și distanța măsurată printr-o aproximare
numerică.
Ținând cont de faptul că variația timpului de răspuns în funcție de distanță este liniară și
datele obținute sunt afectate de erori, în cazul senzorilor ultrasonici aproximarea numerică se
poatre realiza prin regresie liniară.
În urma aproximării prin regresie a valorilor obținute experimental cu senzorii ultrasonici
DT020-1, FESTO și Parallax PING se vor obține relațiile de dependență ale distanței în funcție
de timpul de răspuns al senzorului.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
42
4.2. Model matematic de calcul a timpului de răspuns și a distanței
Pentru obţinerea unor relaţii de dependenţă între timpul de răspuns al senzorului şi
distanţă, s-a făcut o aproximare a traiectoriilor obţinute în urma măsurătorilor, utilizând o
aproximare numerică prin regresie liniară.
Relaţia funcţională între variabilele t (timp de răspuns al senzorului) și d (distanță
măsurată experimental) este liniară, funcţia model având forma:
F d; , d , (4.3)
și funcţia inversă va fi:
t
F t; ,
. (4.4)
În funcție de valorile parametrilor de model α şi au fost corectate valorile obținute
pentru distanța măsurată și cele calculate pentru timpul de răspuns.
În urma corecției valorilor erorilor obținute la măsurarea distanței cu cei trei senzori
ultrasonici s-a obținut o liniarizare a acestora, mai puțin în cazul distanțelor mici. Astfel se
recomandă o modificare a domeniului de detecție la măsurarea distanței cu senzorii ultrasonici
DT020-1, FESTO și Parallax PING, ca în figura 4.1.
Fig. 4.1. Domenii de măsurare recomandate pentru senzorii ultrasonici testați

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
43
În urma documentării în domeniul propagării undelor ultrasonice, a testelor realizate cu
senzorii ultrasonici şi a modelării rezultatelor obţinute, se poate realiza un model matematic
sumar pentru determinarea parametrilor folosiţi [T10].
După aproximarea numerică a datelor tabelate obținute practic în urma testelor realizate,
au fost obținute relații de dependență între distanța dintre senzor și obstacol d[m] și timpul de
răspuns t [µs]. În tabelul 4.1 au fost centralizate relațiile de de dependenţă obținute.
Tabelul 4.1. Relaţii de dependenţă între distanţă şi tip de răspuns
Criteriu de
analiză Obstacol
Distanţă Timp de răspuns Parametri
[m] [µs] α, β
După tipul
senzorului
ultrasonic
PARALLAX S1
S1
td
S1 S1t d
1 5841S ,
1 12 92S ,
DT020-1 S2
S2
td
S2 S2t d
2 5830S ,
2 5 992S ,
FESTO S3
S3
td
S3 S3t d
3 5826S ,
3 1 452S ,
După tipul
materialului
din care
este
confecționat
obstacolul
Oțel
inoxidabil M1
M1
td
M1 M1t d
1 5841M ,
1 1116M ,
Aluminiu M2
M2
td
M2 M2t d
2 5826M ,
2 1 387M ,
Cupru M3
M3
td
M3 M3t d
3 5834M ,
3 0 352M ,
Plastic M4
M4
td
M4 M4t d
4 5851M ,
4 2 343M ,
Lemn M5
M5
td
M5 M5t d
5 5796M ,
6 3 94M ,
Cauciuc M6
M6
td
M6 M6t d
6 5786M ,
6 2 062M ,
După tipul
suprafeței
obstacolului
Suprafață
plană F1
F1
td
F1 F1t d
1 5829F ,
1 1 077F ,
Suprafață
unghiulară F2
F2
td
F2 F2t d
2 5862F ,
2 3 264F ,
Suprafață
cilindrică F3
F3
td
F3 F3t d
3 5835F ,
3 1 307F ,
Conform ecuațiilor obținute se poate scrie relația generală a funcţiei model de corecție a
timpului de răspuns la măsurarea distanței:
S M F S M Ft d3 3
, (4.5)

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
44
și funcţia inversă, de calcul a distanței va fi:
S M F
S M F
t3d
3
, (4.6)
Unde parametri de model S M F, , se calculează astfel:
S1 S2 S3S
M1 M2 M3 M4 M5 M6M
F1 F2 F3F
5832,3
5822,6
5842.3
(4.7)
Și parametri de model S M F, , se calculează astfel:
S1 S2 S3S
M1 M2 M3 M4 M5 M6M
F1 F2 F3F
6,788,3
1,749,6
1,075.3
(4.8)
După efectuarea calculului, ecuația generală de calcul a timpului de răspuns al senzorului
în funcție de distanță, la o temperatură a aerului cuprinsă între 20oC și 30
oC, devine:
t 5832 d 2,487 [µs], (4.9)
și ecuația generală de calcul a distanței în funcție de timpul de răspuns al senzorului ultrasonic,
la o temperatură a aerului cuprinsă între 20oC și 30
oC, se poate scrie:
t 2,487d
5832
[m]. (4.10)
Ecuațiile (4.9) și (4.10) vor fi utilizate în algoritmul de programare la simularea într-un
mediu virtual a deplasării unui robot mobil echipat cu senzori ultrasonici modelați în funcție de
parametrii senzorilor DT020-1, FESTO și Parallax PING. De asemenea, ecuația (4.10) de
calcul a distanței în funcție de timpul de răspuns va fi utilizată la programarea robotului mobil
care va fi optimizat prin implementarea unui sistem senzorial cu senzori ultrasonici.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
45
4.3. Modelarea prin simulare a configurației senzorilor pentru un robot mobil
În vederea optimizării configurației senzorilor unui robot mobil este propusă o metodă de
modelare cu ajutorul unui software de simulare. Având un grad de autonomie ridicat și
posibilitatea de implementare a altor tipuri de senzori, pentru simulare a fost ales robotul mobil
Pro Bot 128. Software-ul propus este MobotSim și are posibilitatea configurării unui robot
mobil asemănător cu cel propus și crearea unor spații de lucru virtuale identice cu cele
amenajate pentru testarea roboților [**11].
Fig. 4.2. Configurarea robotului Pro bot 128
În figura 4.2 este prezentat modelul de configurare a robotului virtual în funcție de
dimensiunile reale: diametrul platformei și distanța dintre roți sunt de 0,1 metri, diametrul
roților este de 0,04 metri și lătimea unei roți de 0,02 metri. În afară de dimensiuni se poate
selecta culoarea și pozitia în spatiul de lucru al robotului [P3].
Pentru evidențierea diferențelor dintre cei trei senzori testați (DT020-1, Parallax și Festo),
au fost configurați trei roboți virtuali cu câte unul din cei trei senzori, fiind simulat un obstacol
poziționat la distanța de 0,15 metri, apoi la distanța de 0,3 metri și în final la distanța de 1
metru (fig. 4.3). Distanțele au fost alese în funcție de probabilitatea ridicată de a fi regăsite în
spațiile reale de lucru în care au fost desfășurate testele. Pentru diferențierea roboților virtuali,
aceștia au fost colorați diferit în fucție de senzorul implementat.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
46
Fig. 4.3. Detecția obstacolelor pentru roboți dotați cu senzori de diferite tipuri
În urma simulării se observă că fiecare robot virtual, cel puțin o dată, nu sesizează
obstacolul cu ajutorul senzorului cu care este dotat, datorită distanței prea mică sau prea mare
față de acesta. La poziționarea robotului la distanțe mici față de obstacol sunt mai eficienți
roboții dotați cu senzorii Parallax și Festo, iar la poziționarea robotului la distanțe mari față de
obstacol sunt mai eficienți roboții dotați cu senzorii Parallax și DT020-1. În concluzie, cel mai
eficient senzor cu care poate fi optimizat sistemul senzorial este senzorul Parallax Ping.
Pentru simularea orientării robotului în spațiile de lucru au fost folosiți parametrii
corespunzători senzorului ultrasonic Parallax Ping [T4]. În figura 4.4 este prezentat robotul
virtual în spațiul de lucru cu trei obstacole fixe, având aceleași dimensiuni cu spațiul real creat
pentru testare.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
47
Fig. 4.4. Simularea spațiului de lucru cu trei obstacole fixe
Robotul virtual a fost echipat mai întâi cu un senzor, apoi cu doi, cu trei și cu patru,
pentru a putea observa diferențele la sesizarea obstacolelor. Se observă că detecția este optimă
la echiparea robotului cu trei și cu patru senzori. Din considerente economice este considerată
necesară și suficientă varianta de echipare a robotului cu trei senzori.
Fig. 4.5. Traiectoria descrisă de robotul virtual dotat cu trei senzori Parallax în spațiul de lucru
cu trei obstacole fixe
Cu robotul virtual echipat cu trei senzori Parallax a fost simulată orientarea în spațiul de
lucru cu obstacole fixe în vederea parcurgerii distanței dintre punctul de start și cel de sosire.
Acestea au fost alese identic cu cele utilizate la testarea robotului Pro Bot 128 în condiții reale,
folosind pentru detecție senzori în infraroșu. În figura 4.5 este prezentată traiectoria descrisă de
robotul virtual dotat cu trei senzori Parallax în spațiul de lucru.
Fig. 4.6. Simularea spațiului de lucru de tip labirint
În figura 4.76 este prezentat robotul virtual în spațiul de lucru de tip labirint, având
aceleași dimensiuni cu spațiul real creat pentru testare. La fel ca în cazul anterior, robotul
virtual a fost echipat mai întâi cu un senzor, apoi cu doi, cu trei și cu patru, pentru a putea

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
48
observa diferențele de percepție a obstacolelor. Se observă că detecția este optimă la echiparea
robotului cu trei și cu patru senzori. Din considerente economice este considerată suficientă
varianta de echipare a robotului cu trei senzori.
Fig. 4.7. Traiectoria descrisă de robotul virtual dotat cu trei senzori Parallax în spațiul de lucru
de tip labirint
Cu robotul virtual echipat cu trei senzori Parallax a fost simulată orientarea în spațiul de
lucru de tip labirint în vederea parcurgerii distanței dintre punctul de start și cel de sosire.
Acestea au fost alese identic cu cele utilizate în condiții reale. În figura 4.7 este prezentată
traiectoria descrisă de robotul virtual dotat cu trei senzori Parallax în spațiul de lucru de tip
labirint.
Tabelul 4.2. Distanțele reale și simulate parcurse în spațiile de lucru utilizate.
Tipul
spațiului de
lucru
Distanța ideală Distanța reală
parcursă
Distanța simulată
parcursă
[m] [m]
Spațiu de
lucru cu trei
obstacole fixe
1,8 3,038 2,6
Spațiu de
lucru de tip
labirint
4,3 9,739 5,8
În tabelul 4.2 sunt prezentate valorile distanței parcurse obținută prin simulare în
comparație cu valorile obținute în urma testelor cu robotul Pro Bot 128 și cu distanța propusă
de traiectoria ideală. În urma simulării se observă o diminuare a distanței parcurse la echiparea
robotului cu trei senzori ultrasonici de tip Parallax PING.
4.4. Concluzii
În urma modelării semnalului senzorilor ultrasonici prin aproximare numerică au fost
inițiate relațiile de dependență între distanța măsurată și timpul de răspuns, ajungând la o formă
generală de calcul a acestora. Astfel, relațiile (4.9) și (4.10) pot fi utilizate la determinarea prin
simulare a distanței măsurate și a timpului de răspuns pentru o temperatură a aerului cuprinsă
între 20oC și 30
oC. Acestea vor fi utilizate la programarea robotului mobil optimizat cu sistem
senzorial de detecție care folosește senzori ultrasonici.
În urma modelării configurației senzorilor pentru un robot mobil prin simulare cu
software-ul MobotSim, a fost ales în vederea optimizării, un sistem cu trei senzori Parallax
Ping care va fi implementat pe unul din roboții mobili utilizați la teste. După simulare a fost
observată o diminuare a valorii distanței parcurse până la punctul de sosire propus.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
49
CAPITOLUL 5. OPTIMIZAREA SISTEMULUI SENZORIAL AL
ROBOȚILOR MOBILI
5.1. Considerații privind alegerea robotului potrivit în vederea optimizării
Pentru orice tip de robot mobil există interes privind optimizarea sistemelor acestuia în
vederea îmbunătățirii performanțelor. Astfel poate fi optimizat sistemul se locomoție, sistemul
senzorial sau se pot îmbunătătii funcțiile unității centrale de comandă. În urma studiilor și
testelor efectuate cu diferiți roboți mobili este necesară aplicarea unei metode eficiente pentru
ca robotul mobil selectat în vederea optimizării să fie cel optim. Având în vedere aceste aspecte
a fost aplicată o analiză multi-criterială. În vederea stabilirii cu exactitate a robotului care este
optim pentru optimizare a fost utilizată o analiză multi-criterial avansată.
Analiza multicriterială este utilă pentru obținerea ierarhizărilor cu subiecți selectați din
același domeniu sau din domenii diferite de activitate în care subiectivismul este înlăturat în
mare parte.
La alegerea variantelor au fost luați în vedere roboții mobili cu care s-au efectuat teste și
senzorii ultrasonici de tip Parallax, fiind cei mai ușor de implementat în sistemul senzorial al
unui robot. Astfel s-a lucrat cu trei variante și anume:
- Robot pășitor (Maxibot) cu sistem senzorial compus din senzori în infraroșu și senzori
ultrasonici.
- Robot cu roți (Pro Bot 128) cu sistem senzorial compus din senzori în infraroșu și
senzori ultrasonici.
- Robot cu șenile (Spy Video TRAKR) cu sistem senzorial compus dintr-un senzor vizual
și senzori ultrasonici.
În funcţie de clasamentul final obținut în urma analizei a fost ales pentru optimizare
robotul mobil Pro Bot 128 (locomoție cu roți), cu sistem senzorial compus din senzori în
infraroșu și senzori ultrasonici Parallax Ping. Acest robot are gradul de autonomie cel mai
ridicat în comparație cu roboții testați și este cel mai maleabil din punct de vedere a modelării
sistemului de detecție a obstacolelor.
5.2. Contribuții privind optimizarea sistemelor senzorial și de locomoție
În urma testelor efectuate cu roboții mobili și senzorii ultrasonici, a modelării acestora și
a analizei multi-criteriale, a fost ales pentru optimizare robotul mobil Pro Bot 128. Acest robot
are gradul de autonomie cel mai mare în comparație cu roboții testați și este cel mai maleabil
din punct de vedere a modelării sistemului de detecție a obstacolelor.
5.2.1. Optimizarea sistemului senzorial al robotului Pro Bot 128
Robotul Pro Bot 128 are un sistem senzorial complex, format din doi senzori de lumină,
doi odometrii, un senzor de urmărire a liniei (fotodetecție), un sistem senzorial infraroşu anti
coliziune, un senzor acustic, şi un senzor care controlează tensiunea de alimentare. La testele
efectuate în cele două spații de lucru, robotul a fost programat să utilizeze sistemul senzorial în
infraroșu în vederea detecției obstacolelor.
Pentru optimizarea sistemului senzorial se propune adăugarea unuia sau mai multor
senzori ultrasonici de tip Parallax Ping.
În primul rând se va implementa robotului mobil un sistem format dintr-un senzor
Parallax Ping și unitate de procesare de tip Propeller Activity Board, ca în figura 5.1 [**12].
Programarea unității de procesare s-a efectuat in limbajul de programare C. La scrierea
algoritmului s-a ținut cont de expresia obținută în urma modelării pentru calcularea distanței în
funcție de timpul de răspuns.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
50
Fig. 5.1. Senzor ultrasonic montat pe o unitate de procesare de tip Propeller Activity Board
În primă fază au fost montați pe placa de tip Propeller doi rezistori de 20 kOhm pentru
conectarea porturilor P14 și P15 la alimentarea de 3,3 V. Apoi a fost adăugat un avertizor care
emite sunete dacă se descarcă acumulatorii, sau când comportamentul robotului se modifică
din diferite cauze. După efectuarea acestor operații se montează senzorul Parallax PING pe
placa de bază.
După montarea tuturor componentelor pe placa de bază, aceasta se montează pe robotul
Pro Bot 128, conectându-se în prealabil și cele două motoare, ca în figura 5.2. Motorul din
dreapta se conectează printr-un cablu cu trei fire la portul P13 de pe placa tip Propeller și
motorul din stânga la portul P12.
Fig. 5.2. Implementarea unității de procesare de tip Propeller Activity Board pe robot
Pentru studierea comportamentului robotului Pro Bot 128 pe care a fost implementat un
sistem de navigație care folosește un senzor ultrasonic de tip Parallax PING, a fost amenajat un
spațiu de lucru cu trei obstacole fixe și apoi un spațiu de tip labirint, în aceleași condiții
utilizate la testarea acestuia fără acest sistem implementat.
Fig. 5.3. Deplasarea robotului Pro Bort 128 cu sistem de navigație care folosește un senzor
ultrasonic în spațiul de lucru cu obstacole fixe și în spațiul de lucru de tip labirint

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
51
În figura 5.3 este prezentată traiectoria descrisă de robotul Pro Bot 128, la care a fost
implementat sistemul de detecție cu un senzor ultrasonic, în spațiul de lucru cu trei obstacole
fixe de diferite forme și în spațiul de lucru de tip labirint. Distanța parcursă în spațiul de lucru
cu trei obstacole fixe are valoarea dF1 = 3,239 m, din care 0,535 m au fost parcurși la mersul
înapoi. Robotul a parcurs o distanță cu 1,439 m mai mare față de traiectoria ideală. Distanța
parcursă și în spațiul de lucru de tip are valoarea dL1= 8,411 m, din care 1,843 m au fost
parcurși la mersul înapoi. Robotul a parcurs o distanță cu 4,111 m mai mare față de traiectoria
ideală.
În urma testelor efectuate cu robotul optimizat în forma prezentată anterior se observă că
în cazul spațiului de lucru cu obstacole fixe distanța parcursă a fost mai mare cu 0,101 m față
de distanța parcursă de același robot, dar folosind sistemul de detecție cu senzori în infraroșu.
În spațiul de lucru de tip labirint situația se schimbă, robotul optimizat parcurgând o distanță cu
1,328 m mai mică față de distanța parcursă de robot folosind sistemul de detecție cu senzori în
infraroșu.
O altă soluție ar fi montarea a doi sau trei senzori și testarea robotului în vederea
observării diferențelor la orientarea robotului în spațiul de lucru. În urma modelării
configurației senzorilor pentru un robot mobil prin simulare cu software-ul MobotSim, a fost
ales în vederea optimizării, un sistem cu trei senzori Parallax Ping. Din considerente
economice se poate monta un singur senzor pe o platformă acționată de un servomotor, care are
posibilitatea rotirii la 180 de grade (fig. 5.4) [**12].
Fig. 5.4. Senzor ultrasonic montat pe o platformă rotativă
Implementarea senzorului montat pe platforma rotativă a fost realizată prin conectarea
senzorului ultrasonic și a servomotorului la unitatea de procesare de tip Propeller Activity
Board și atașarea platformei la robotul Pro Bot 128. Montarea senzorului ultrasonic atașat la
platforma rotativă este prezentată în figura 5.5.
Fig. 5.5. Montarea sistemului de detecție cu platformă rotativă pe robot

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
52
Servomotorul va fi comandat de unitatea de procesare să se rotească cu 180o la dreapta și
apoi la stânga în mod continuu pe toată durata deplasării robotului în spațiul de lucru (fig. 5.6).
Fig. 5.6. Robotul optimizat cu sistem de detecție cu senzor ultrasonic montat pe platformă
rotativă
Robotul folosind dispozitivul cu platformă rotativă a fost testat la fel ca și în cazul
anterior, în spațiul de lucru cu obstacole fixe și apoi un spațiul de tip labirint.
În figura 5.7 este prezentată traiectoria descrisă de robotul optimizat cu sistem de detecție
cu senzor ultrasonic montat pe platformă rotativă în spațiul de lucru cu trei obstacole fixe de
diferite forme și în spațiul de lucru de tip labirint. Distanța parcursă în spațiul de lucru cu trei
obstacole fixe are valoarea dF2 = 2,934 m, din care 0,428 m au fost parcurși la mersul înapoi.
Robotul a parcurs o distanță cu 1,134 m mai mare față de traiectoria ideală. Distanța parcursă
în spațiul de lucru de tip labirint are valoarea dL2 = 7,053 m, din care 1,054 m au fost parcurși
la mersul înapoi. Robotul a parcurs o distanță cu 2,753 m mai mare față de traiectoria ideală.
Fig. 5.7. Deplasarea robotului Pro Bort 128 cu sistem de navigație care folosește un senzor
ultrasonic montat pe o platformă rotativă în spațiul de lucru cu obstacole fixe și în spațiul de
lucru de tip labirint
În urma testelor efectuate cu robotul optimizat cu sistem de navigație care folosește un
senzor ultrasonic montat pe o platformă rotativă se observă că în cazul spațiului de lucru cu
obstacole fixe distanța parcursă a fost mai mică cu 0,104 m față de distanța parcursă de robot
folosind sistemul de detecție cu senzori în infraroșu. În spațiul de lucru de tip labirint robotul
optimizat a parcurs o distanță cu 2,686 m mai mică față de distanța parcursă de robot folosind
sistemul de detecție cu senzori în infraroșu.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
53
5.2.2. Optimizarea sistemului de locomoție al robotului Pro Bot 128
Robotul mobil Pro Bot 128 dispune de un sistem de locomoție diferențial. Un sistem
diferenţial este alcătuit din două roţi montate pe un ax comun controlate prin două motoare
separate. Pentru optimizarea sistemului locomotor al robotului mobil Pro Bot 128 se vor
înlocui roțile și motoarele cu altele care folosec un sistem de codificare de tip encoder
asemănător cu cel existent. Aceste modificări vor îmbunătăți modalitea de deplasare a
robotului în spațiul de lucru prin reducerea abaterii de la traiectorie și micșorarea distanței
parcurse.
Fig. 5.8. Roată de tip encoder (cu sistem de codificare)
În figura 5.8 este prezentat tipul de roată propusă pentru a-l înlocui pe cel din dotarea
robotului, având un diametru de 62,2 milimetri și circumferința de 208 milimetri. Roata
prezintă 32 de fante poziționate la 3,25 milimetri între ele, acestea propunând un cod.
Funcționarea unui sistem de tip encoder se bazează pe transformarea unui semnal analogic
transmis de un traductor în infraroșu montat în vecinătatea roții într-un semnal digital care, cu
ajutorul unei unități de procesare, va controla turația motorului care acționează roata respectivă
[**12]. Unitatea emițătoare a senzorului infraroșu va trimite un semnal către inelul roții unde
sunt decupate cele 32 de fante identice. Dacă radiația infraroșie trece prin una din fante, va fi
transmis un semnal puternic către unitatea de procesare. Dacă radiația infraroșie este reflectată
spre unitarea receptoare a senzorului, va fi transmis un semnal slab către unitatea de procesare.
În funcție de viteza de variație puternic-slab a semnalului, unitatea de procesare va trimite un
semnal digital către motor[**12].
Fig. 5.9. Conectarea senzorilor și servomotoarelor la unitatea de procesare
Roțile vor fi acționate de câte un servomotor în funcție de semnalele transmise de
unitățile senzoriale în infraroșu. Senzorii în infraroșu vor fi conectați la porturile P14 și P15 ale
unității de procesare de tip Propeller Activity Board și servomotoarele vor fi conectate la

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
54
porturile P12 și P13 (fig. 5.9). Prin implementarea noului sistem locomotor se poate
îmbunătății comportamentul robotului mobil la parcurgerea distanței din spațiile de lucru.
Pentru implementarea noului sistem de locomoție au fost montate în primul rând
dispozitivele cu senzori în infraroșu pe servomotoarele care acționează roțile. Apoi
componentele obținute au fost atașate șasiului robotului mobil. După efectuarea acestor operații
s-a conectat noul sistem de locomoție la placa de procesare alături de platforma rotativă cu
senzor ultrasonic deja atașate pe robotul mobil.
Fig. 5.10. Montarea noului sistem de locomoție pe robotul mobil
Robotul folosind noul sistem de locomoție precum și dispozitivul cu platformă rotativă a
fost testat, la fel ca și în cazurile prezentate anterior, în spațiul de lucru cu obstacole fixe și apoi
un spațiul de tip labirint.
Fig. 5.11. Deplasarea robotului Pro Bort 128 cu sistemule de locomoție optimizat în spațiul de
lucru cu obstacole fixe și în spațiul de lucru de tip labirint
În figura 5.11 este prezentată traiectoria descrisă de robotul Pro Bot 128, la care a fost
implementat sistemul de locomoție, în spațiul de lucru cu trei obstacole fixe de diferite forme și
în spațiul de lucru de tip labirint. Distanța parcursă în spațiul de lucru cu trei obstacole fixe are
valoarea dF3 = 2,814 m, din care 0,363 m au fost parcurși la mersul înapoi. Robotul a parcurs o
distanță cu 1,014 m mai mare față de traiectoria ideală. Distanța parcursă în spațiul de lucru de
tip labirint are valoarea dL3 = 6,199 m, din care 0,880 m au fost parcurși la mersul înapoi.
Robotul a parcurs o distanță cu 1,899 m mai mare față de traiectoria ideală.
În urma testelor efectuate cu robotul optimizat cu un nou sistem de locomoție se observă
că în cazul spațiului de lucru cu obstacole fixe distanța parcursă a fost mai mică cu 0,120 m
față de distanța parcursă de robot folosind vechiul sistem de locomoție și sistemul senzorial
optimizat cu senzorul ultrasonic montat pe platforma mobilă. În spațiul de lucru de tip labirint

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
55
robotul optimizat a parcurs o distanță cu 0,854 m mai mică față de distanța parcursă de robot
folosind vechil sistem de locomoție.
Tabelul 5.1. Distanțele parcurse de robotul optimizat în spațiul de lucru cu obstacole fixe
Tipul de optimizare
Distanța
totală
parcursă
Distanța
parcursă la
mers înainte
Distanța
parcursă la
mers înapoi
Diferența față
de distanța
ideală
[m] [m] [m] [m]
Robot neoptimizat 3,038 2,616 0,422 1,238
Robot optimizat cu
senzor ultrasonic 3,239 2,704 0,535 1,439
Robot optimizat cu
senzor ultrasonic pe
platformă mobilă
2,934 2,506 0,428 1,134
Sistem locomotor
optimizat 2,814 2,451 0,363 1,014
În tabelul 5.1 sunt prezentate diferențele dintre distanțele parcurse de robot în spațiul de
lucru cu obstacole fixe de diferite forme, în funcție de tipul de optimizare. Varianta optimă este
cea în care a fost implementat noul sistem de locomoție, alături de sistemul de detecție care
folosește un senzor ultrasonic montat pe o platformă rotativă (fig. 5.12).
Fig. 5.12. Diferențele dintre distanțele parcurse de robot în spațiul de lucru cu obstacole fixe
În tabelul 5.2 sunt prezentate diferențele dintre distanțele parcurse de robot în spațiul de
lucru de tip labirint, în funcție de tipul de optimizare a robotului.
Tabelul 5.2. Distanțele parcurse de robotul optimizat în spațiul de lucru de tip labirint
Tipul de optimizare
Distanța
totală
parcursă
Distanța
parcursă la
mers înainte
Distanța
parcursă la
mers înapoi
Diferența față
de distanța
ideală
[m] [m] [m] [m]
Robot neoptimizat 9,739 7,401 2,338 5,439
Robot optimizat cu
senzor ultrasonic 8,411 6,568 1,843 4,111
Robot optimizat cu
senzor ultrasonic pe
platformă mobilă
7,053 5,999 1,054 2,753
Sistem locomotor
optimizat 6,199 5,319 0,880 1,899

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
56
Fig. 5.13. Diferențele dintre distanțele parcurse de robot în spațiul de lucru de tip labirint
Față de spațiul de lucru cu obstacole fixe, în acest caz se observă că reducerea distanței
parcurse între punctul de start și cel de sosire este mai semnificativă (fig. 5.13). Astfel robotul
la care a fost implementat noul sistem de locomoție, alături de sistemul de detecție care
folosește un senzor ultrasonic montat pe o platformă rotativă a parcurs o distanță mai mică cu
aproximativ o treime din distanța parcursă parcursă de robot folosind sistemul de detecție cu
senzori în infraroșu.
5.3. Concluzii
În urma modificării configurației senzorilor pentru robotul mobil s-a urmărit diminuarea
valorii distanței parcurse de la punctul de pornire până la punctul de sosire propus. O diminuare
semnificativă s-a obținut în urma testelor realizate cu robotul optimizat cu sistem de detecție cu
senzor ultrasonic montat pe platformă rotativă.
În urma modificării sistemului de locomoție al robotului Pro Bot 128 s-a îmbunătățit
modul de rulare și timpul de parcurgere a distanței până la punctul de sosire, fiind parcursă o
distanță mai mică față de cea parcursă de robot cu vechiul sistem de locomoție.
Fig. 5.14. Evoluția robotului mobil optimizat
În încheiere, se poate spune că pentru buna funcţionare a unui robot mobil trebuie să
existe o bună corelaţie între sistemele senzoriale, de acţionare, de locomoţie etc. Senzorii
ultrasonici de tip Parallax PING pot fi implementați cu succes în sistemul de detecție al unui
robot mobil, având un preț rezonabil în comparație cu alte tipuri de senzori. De asemenea, se
poate spune că implementarea senzorilor ultrasonici pe orice tip de robot este facilă,
conexiunile cu placa de pe unitatea de procesare fiind ușor de realizat.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
57
CAPITOLUL 6. CONCLUZII FINALE ȘI CONTRIBUȚII PERSONALE
6.1. Concluzii finale
Dezvoltarea roboticii în ultimul deceniu a condus la realizarea a numeroase tipuri de
roboți mobili având diverse variante funcţionale şi constructive. Și domeniile de aplicativitate
ale roboticii s-au extins, tot mai mulți roboți fiind implementați în diferite activități din cadrul
medicinei, construcțiilor, armatei, administrației publice, agriculturii, transporturilor și de ce nu
și în divertisment.
Abordarea unei teme de cercetare referitoare la sistemul senzorial al robotului mobil
necesită o analiză a stadiului actual al roboticii mobile și a tipurilor de senzori folosiți la
detecția obstacolelor în timpul deplasării, testarea senzorilor și a roboților în vederea
îmbunătățirii comportamentului la detecția obstacolelor într-un spațiu de lucru.
Sistemul senzorial al unui robot de orice tip, are cea mai importantă funcţie în orientarea
acestuia în spaţiul de lucru, fiind compus din unul sau mai multe tipuri de senzori. Senzorii
tactili sunt folosiţi în practică sub formă individuală şi sub formă matricială. Senzorii tactili
matriciali prezintă o capacitate informaţională mai mare, fiind mult mai eficienţi decât dacă
sunt folosiţi individual. Cei mai întrebuinţaţi senzori vizuali sunt cei de tip CCD şi CMOS.
Senzorii CCD, în raport cu senzorii CMOS, oferă o calitate superioară a imaginii, zgomot
redus, citire rapidă a imaginilor de calitate superioară. Senzorii CMOS au preţul de cost mai
scăzut, integrare în cip, consum redus şi tehnologie mai simplă de fabricare. Senzorii de
detecţie acustici, precum şi senzorii ultrasonici au calităţi superioare celor optici impunându-se
într-o vastă serie de aplicaţii. Aceşti senzori sunt optimi la aplicaţii în medii cu vizibilitate
redusă şi în condiţii grele sau care exclud utilizarea fenomenului optic.
Studiul experimental asupra comportamentului roboților mobili în procesul de percepere
a obstacolelor, impune alegerea unor obstacole de dimensiuni, forme şi materiale diferite. De
asemenea este deosebit de importantă şi alegerea spaţiului de lucru în care vor fi amplasate
obstacolele. Acesta ar trebui să fie un spaţiu închis unde pot fi controlaţi parametrii atmosferici,
cum ar fi temperatura, umiditatea şi nivelul de zgomot. Astfel, pentru testarea abilităților
roboților mobili au fost amenajate două spații de lucru închise, unul cu trei obstacole fixe de
diferite forme și unul de tip labirint.
Pentru studiul experimental au fost utilizați șase roboți mobili care prezintă diverse
sisteme senzoriale pentru detecția obstacolelor și diverse tipuri de sisteme de locomoție:
- Robot mobil Pro Bot 128 (prezintă sistem de detecție cu senzori în infraroșu și
fotodetecție și sistem locomotor cu roți);
- Robot mobil Spy Video TRAKR (prezintă sistem de detecție cu senzori vizuali și
sistem locomotor cu șenile);
- Robot mobil KSR4 – ESCAPE (prezintă sistem de detecție cu senzori în infraroșu și
sistem locomotor cu roți);
- Robot umanoid Maxibot (prezintă sistem de detecție cu senzori în infraroșu și sistem
locomotor pășitor);
- Robot păşitor Hexbug Delta (prezintă sistem de detecție cu senzori tactili și sistem
locomotor pășitor);
- Mini-vehicul teleghidat (prezintă sistem de detecție cu senzor ultrasonic și sistem
locomotor cu roți).
Înainte de testarea în spațiile de lucru amenajate a fost determinată abaterea de la
traiectorie a fiecărui robot în parte și au fost urmărite abilitățile acestora la rularea pe diferite
tipuri de suprafețe (parchet, covor și nisip).
În vederea determinării abaterii de la traiectorie a fost conceput și dezvoltat un dispozitiv
care folosește un senzor pentru măsurarea vitezei unghiulare, având un sistem de ghidare pe
șine și care este atașat robotului testat. Astfel a fost determinată abaterea unghiulară și apoi a
fost calculată abaterea liniară, rezultând că din acest punct de vedere roboții care folosesc
sisteme de locomoție cu roți și cu șenile sunt superiori celor pășitori.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
58
La deplasarea pe diferite tipuri de suprafețe a fost implementat fiecărui robot testat un
senzor care măsoară accelerația. Astfel a fost urmărită variația accelerației la deplasarea unui
robot care folosește sistem de locomoție cu roți și unul cu șenile. În urma analizei datelor
obținute, din acest punct de vedere superiori sunt roboții care folosesc sistem de locomoție cu
șenile.
Pentru testarea în spațiile de lucru amenajate au fost selectați trei roboți în funcție de
sistemul locomotor și gradul de autonomie: robotul Spy Video TRAKR (semiautonom cu
șenile), robotul Maxibot (semiautonom pășitor) și robotul Pro Bot 128 (autonom cu roți). În
vederea stabilirii cu precizie a traseului parcurs de fiecare robot, aceștia au fost dotați cu un
sistem de trasare a marcajului. În urma testării celor trei roboți au fost observate traiectoriile
descrise de aceștia la deplasare și a fost măsurată distanța parcursă de fiecare între un punct de
start și unul de sosire. Distanța cea mai mare a fost parcursă de robotul Pro Bot 128 acesta fiind
singurul care nu a fost ajutat de operatorul uman.
În vederea îmbunătățirii sistemului de detecție a robotului Pro Bot 128 au fost testați trei
senzori ultrasonici cu domenii de măsurare diferite și anume:
- Senzorul utrasonic DT020-1;
- Senzorul utrasonic FESTO;
- Senzorul ultrasonic Parallax PING.
Senzorul utrasonic DT020-1 are un domeniu mare de măsurare, cuprins între 0,4m și
10m, senzorul FESTO un domeniu mic de măsurare, cuprins între 0,15m și 0,5m și senzorul
Parallax PING un domeniu cuprins între 0,2m și 3m. Cu cei trei senzori s-au efectuat
măsurători de distanță față de obstacole de dimensiuni forme și materiale diferite precum și la
aplicarea unor viteze ale curentului de aer distribuie paralel, perpendicular și la unghi de 45 de
grade față de unda ultrasonică. Senzorul utrasonic DT020-1 a fost utilizat și sub formă de
radar, fiind montat pe o platformă rotativă în vederea observării modului de percepere a
diferitelor forme ale obstacolelor de către senzorii ultrasonici.
Rezultatele obținute în urma testării celor trei senzori au fost supuse unei modelări
matematice, utilizând aproximarea prin regresie liniară, obținându-se o ecuație generală de
calcul a timpului de răspuns al senzorului în funcție de distanță, la o temperatură a aerului
cuprinsă între 20oC și 30
oC și o ecuație inversă de calcul a distanței în funcție de timpul de
răspuns. Pe baza ecuațiilor obținute au fost dezvoltate niște programe de calcul a distanței și a
timpului de răspuns în diferite condiții. De asemenea, ecuația de calcul a distanței în funcție de
timpul de răspuns a fost utilizată la programarea robotului mobil optimizat prin implementarea
unui sistem senzorial cu senzori ultrasonici.
În vederea optimizării configurației senzorilor s-a efectuat și simularea deplasării
robotului mobil Pro Bot 128 cu ajutorul software-ului MobotSim care are posibilitatea
configurării unui robot mobil asemănător cu cel propus și crearea unor spații de lucru virtuale
identice cu cele amenajate pentru testarea roboților. În urma modelării configurației senzorilor
prin simulare cu software-ul MobotSim, a fost ales în vederea optimizării, un sistem cu trei
senzori Parallax Ping care va fi implementat pe mobil.
În vederea stabilirii cu exactitate a robotului care este optim pentru optimizare a fost
utilizată o analiză multi-criterial avansată. Analiza multicriterială este utilă pentru obținerea
ierarhizărilor cu subiecți selectați din același domeniu sau din domenii diferite de activitate în
care subiectivismul este înlăturat în mare parte.
La alegerea variantelor au fost luați în vedere roboții mobili cu care s-au efectuat teste și
senzorii ultrasonici de tip Parallax, fiind cei mai ușor de implementat în sistemul senzorial al
unui robot. Astfel s-a lucrat cu trei variante și anume:
- Robot pășitor (Maxibot) cu sistem senzorial compus din senzori în infraroșu și senzori
ultrasonici.
- Robot cu roți (Pro Bot 128) cu sistem senzorial compus din senzori în infraroșu și
senzori ultrasonici.
- Robot cu șenile (Spy Video TRAKR) cu sistem senzorial compus dintr-un senzor vizual
și senzori ultrasonici.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
59
În funcţie de clasamentul final obținut în urma analizei a fost ales pentru optimizare
robotul mobil Pro Bot 128 (locomoție cu roți), cu sistem senzorial compus din senzori în
infraroșu și senzori ultrasonici Parallax Ping. Acest robot are gradul de autonomie cel mai
ridicat în comparație cu roboții testați și este cel mai maleabil din punct de vedere a modelării
sistemului de detecție a obstacolelor.
La testele efectuate în cele două spații de lucru, robotul Pro Bot 128 a fost programat să
utilizeze sistemul senzorial în infraroșu în vederea detecției obstacolelor. Pentru optimizarea
sistemului senzorial, în primul rând a fost implementat robotului mobil un sistem format dintr-
un senzor Parallax Ping și unitate de procesare de tip Propeller Activity Board. În urma testelor
efectuate în aceleași spații de lucru, robotul a parcurs o distanță mai mare în spațiul cu
obstacole fixe și o distanță mai mică în spațiul de lucru de tip labirint. O altă soluție a fost
montarea unui senzor pe o platformă acționată de un servomotor, care are posibilitatea rotirii la
180 de grade. Robotul astfel configurat a parcurs o distanță mai mică în ambele cazuri. Pentru a
se îmbunătăți comportamentul robotului și mai mult, a fost optimizat și sistemul de locomoție,
înlocuindu-se roțile și motoarele cu altele care folosesc un sistem de codificare de tip encoder.
Funcționarea unui sistem de tip encoder se bazează pe transformarea unui semnal analogic
transmis de un traductor în infraroșu montat în vecinătatea roții într-un semnal digital care, cu
ajutorul unei unități de procesare va controla turația motorului care acționează roata respectivă.
Acest sistem este mai eficient, unitatea de comandă a robotului primind date foarte precise
privind parametri funcționali specifici deplasării și furnizând apoi comenzile necesare
navigației. În urma testelor efectuate cu robotul optimizat cu un nou sistem de locomoție,
distanța parcursă în cele două spații de lucru a fost redusă semnificativ.
Varianta cea mai performantă de optimizare a fost varianta în care a fost implementat
noul sistem de locomoție, alături de sistemul de detecție care folosește un senzor ultrasonic
montat pe o platformă rotativă. Astfel se poate spune că implementarea unui sistem senzorial
cu senzori ultrasonici se poate realiza pentru o multitudine de roboți, fiind recomandată la
detecția obstacolelor din spațiul de operare.
6.2. Contribuții personale
Contribuțiile personale aduse în domeniul roboților mobili din punct de vedere al
îmbunătățirii comportamentului acestora în procesul de detecție a obstacolelor dintr-un spațiu
de lucru sunt:
- Analiza literaturii de specialitate referitoare la stadiul actual din domeniul roboților
mobili și al sistemelor senzoriale utilizate în procesul de detecție.
- Testarea robotului mobil autonom Escape într-un spațiu de lucru cu obstacole de diferite
forme și materiale în vederea urmăririi comportamentului acestuia în procesul de
navigație și propunerea de optimizare prin adăugarea a încă două diode infraroşu de
emitere.
- Proiectarea și elaborarea unui sistem de determinare a abaterii de la traiectorie a roboților
mobili precum și amenajarea unui traseu cu benzi de mărimi și culori diferite.
- Testarea roboților mobili din punct de vedere al abaterii de la traiectorie, analiza datelor
obținute și remedierea defectelor găsite la sistemele de locomoție.
- Amenajarea unor medii de lucru cu suprafețe de rulare diferite (parchet, covor și nisip)
pentru analiza comportamentului roboțior din punct de vedere al accelerației la demaraj.
Pentru teste au fost echipați cu senzorul ultrasonic DT020-1 doi roboți mobili, unul cu
sistem locomotor cu roți și altul cu șenile.
- Amenajarea a două spații de lucru închise, unul cu obstacole fixe de diferite forme și unul
de tip labirint, în vederea observării comportamentului a trei roboți mobili, din punct de
vedere al navigației.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
60
- Dotarea roboților Spy Video TRAKR, Maxibot și Pro Bot 128 cu un sistem de trasare a
marcajului. Acest sistem a fost bazat pe un nuanțator care a trasat o linie în timpul
deplasării robotului.
- Testarea roboților Spy Video TRAKR, Maxibot și Pro Bot 128 în spațiile de lucru
amenajate și măsurarea distanței parcurse de aceștia dintre un punct de start și unul de
sosire.
- Pregătirea și asamblarea echipamentelor de achiziție de date MultilogPro și Arduino în
vederea testării senzorilor ultrasonici DT020-1, FESTO și Parallax PING.
- Măsurarea distanței cu senzorii ultrasonici DT020-1, FESTO și Parallax PING față de
obstacole de diferite forme, mărimi și materiale în vederea alegerii sistemului optim de
îmbunătățire a configurației senzorilor unui robot mobil.
- Elaborarea unui dispozitiv de tip platformă rotativă pentru utilizarea senzorului DT020-1
ca radar pentru observarea percepției obiectelor de diferite forme din punct de vedere al
senzorului ultrasonic.
- Analiza datelor obținute în urma măsurătorilor de distanță din punct de vedere al erorilor
de măsurare.
- Conceperea unui program de calcul a timpului de răspuns și vitezei sunetului în aer în
funcție de temperatura mediului ambiant și de distanța dintre senzorul ultrasonic și
distanță. Programul a fost creat în limbajul de programare Microsoft Visual Basic 2010
Expres.
- Modelarea datelor obținute în urma măsurătorilor de distanță folosind aproximarea prin
regresie liniară și realizarea modelului matematic pentru calculul timpului de răspuns în
funcție de distanță. Obținerea unei ecuații generale care a fost utilizată la programarea
sistemului de detecție care folosește senzori ultrasonici.
- Simularea comportamentului robotului mobil Pro Bot 128 cu ajutorul software-ului
MobotSim care are posibilitatea configurării unui robot mobil asemănător cu cel propus
și crearea unor spații de lucru virtuale identice cu cele amenajate pentru testarea roboților.
- Alegerea robotului potrivit pentru optimizare prin analiză multicriterială.
- Pregătirea și implementarea pe robotul mobil Pro Bot 128 a unui sistem de detecție cu
senzor Parallax Ping și unitate de procesare de tip Propeller Activity Board și testarea
acestuia în spațiile de lucru cu obstacole fixe și de tip labirint.
- Implementarea pe robotul mobil Pro Bot 128 a unui sistem de detecție cu senzor Parallax
Ping montat pe o platformă rotativă acționată de un servomotor și testarea acestuia în
spațiile de lucru.
- Implementarea pe robotul mobil Pro Bot 128 a unui sistem de locomoție de tip encoder și
testarea acestuia în spațiile de lucru.
- Analiza datelor obținute experimental și trasarea concluziilor finale.
6.3. Valorificarea rezultatelor cercetării
Rezultatele cercetărilor dezvoltate în vederea elaborării tezei de doctorat au fost
valorificate prin:
- Elaborarea rapoartelor din programul de pregătire doctorală:
1. Consideraţii asupra stadiului actual al cercetărilor privind senzorii şi configuraţia
senzorilor de la roboţii mobili.
2. Contribuţii teoretice privind optimizarea configuraţiei senzorilor şi modul de deplasare
la roboţii mobili.
3. Contribuţii privind modelarea configuraţiei senzorilor şi a sistemului locomotor la
roboţii mobili.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
61
- Publicarea a 19 lucrări, la manifestări naţionale şi internaţionale, dintre care 16 ca prim
autor:
1. Ţârulescu R., Usage of sonar and ultrasonic senzors for mobile robots
orientation, Annals of the Oradea University, Editura Universităţii din Oradea,
2005, ISSN 1583-0691.
2. Ţârulescu R., Consideraţii privind optimizarea sistemului senzorial la un robot
mobil, International Session of Scientific Papers, Education And Scientific
Research At European Standards, Academia Forţelor Aeriene „Henri Coandă”,
Braşov 11-12 Mai 2007, ISBN 978-973-8415-45-4.
3. Ţârulescu R., Ţârulescu S., Infrared detection senzors for mobile robots,
Academic Journal of Manufacturing Engineering, Supplement, Issue 2 / 2008,
Editura Politehnica Timisoara, ISSN 1583-7904.
4. Ţârulescu R., Ţârulescu S., Ultrasonic senzors for mobile robots, Academic
Journal of Manufacturing Engineering, Supplement, Issue 2 / 2008, Editura
Politehnica Timisoara, ISSN 1583-7904.
5. Ţârulescu R., Ţârulescu S., Senzori ultrasonici folosiţi la navigaţia roboţilor
mobili, Sesiune de comunicări ştiinţifice cu participare internaţională, AFARES -
2008, Academia Forţelor Aeriene „Henri Coandă”, Braşov 16-17 Mai 2008, ISBN
978-973-8415-56-0.
6. Ţârulescu R., Drugă C., Braun B., Ultrasonic senzor for distance measuring, 2nd
International Conference Advanced Composite Materials Engineering COMAT
2008, 9–11 October 2008, Brasov, ISSN 1844 – 9336.
7. Ţârulescu R., Drugă C., Braun B., Optical senzor for distance measuring, 2nd
International Conference Advanced Composite Materials Engineering COMAT
2008, 9–11 October 2008, Brasov, ISSN 1844 – 9336.
8. Drugă C., Ţârulescu R., Braun B., On the displacement measuring errors using
the coiled resistive transducers in potentiometric mounting, 2nd
International
Conference Advanced Composite Materials Engineering COMAT 2008, 9–11
October 2008, Brasov, ISSN 1844 – 9336.
9. Drugă C., Braun B., Ţârulescu R., Coiled resistive transducers with nonlinear
characteristics obtained by shunting, 2nd
International Conference Advanced
Composite Materials Engineering COMAT 2008, 9–11 October 2008, Brasov,
ISSN 1844 – 9336.
10. Ţârulescu R., Ţârulescu S., Disturbing factors influence in ultrasonic senzor
detection, Editura Universitatii din Oradea, ISSN 1583-0691, ANNALS of the
ORADEA UNIVERSITY, 2012.
11. Ţârulescu R., Ţârulescu S., Distance measurements with ultrasonic senzor
DT020-1, Editura Universitatii din Oradea, ISSN 1583-0691, ANNALS of the
ORADEA UNIVERSITY, 2012.
12. Ţârulescu R., Usage of Parallax ultrasonic senzors in distance measuremnts,
Editura Universitatii din Oradea, ISSN 1583-0691, ANNALS of the ORADEA
UNIVERSITY, 2013.
13. Ţârulescu R., Olteanu C., Ţârulescu S., Texture of material influence at
ultrasonic detection, Editura Universitatii din Oradea, ISSN 1583-0691,
ANNALS of the ORADEA UNIVERSITY, 2014.
14. Ţârulescu R., Mobile robots navigation in a maze type of working environment,
Revista Creativitate și Inventică, Vol. 6, ISSN 2067-3086, Editura Universitatii
Transilvania Brașov, 2014.
15. Ţârulescu R., Ultrasonic detection of obstacles with different shapes, Revista
Creativitate și Inventică, Vol. 6, ISSN 2067-3086, Editura Universitatii
Transilvania Brașov, 2014.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
62
16. Ţârulescu R., Olteanu C., Zamfira S., Variation of start acceleration for wheeled
and tracked autonomus mini-vehicles, Procedings of International Congress
„Sience and Management of Automotive and Transportation Engineering” SMAT
2014, Vol 1, 23-25 October 2014, Craiova, ISBN 978-606-14-0864-1.
17. Ţârulescu R., Zamfira S., Olteanu C., Senzorial system optimization for one
autonomous mini-vehicle, Procedings of International Congress „Sience and
Management of Automotive and Transportation Engineering” SMAT 2014, Vol
1, 23-25 October 2014, Craiova, ISBN 978-606-14-0864-1.
18. Ţârulescu S., Ţârulescu R., The influence of wind speed and direction over the
ultrasonic detection, Procedings of International Congress „Sience and
Management of Automotive and Transportation Engineering” SMAT 2014, Vol
1, 23-25 October 2014, Craiova, ISBN 978-606-14-0864-1.
19. Ţârulescu R., Olteanu C., Navigation system optimization for mobile robot pro
bot 128, 5th International Conference Advanced Composite Materials
Engineering and The 3rd International Conference “Research & Innovation in
Engineering” COMAT 2014, 16-17 October 2014, Brașov, ISBN 978-606-19-
0411-2.
6.4. Direcții viitoare de cercetare
Cercetările realizate precum şi rezultatele teoretice, experimentale şi practice obţinute
acoperă într-o mică parte diversitatea problemelor care apar la detecția obstacolelor dintr-un
spațiu de lucru. O continuare a studiului început în cadrul acestei teze se poate baza pe:
- Testarea roboților mobili în spații de lucru deschise, cu suprafețe de rulare diferite.
- Testarea roboților mobili în spații de lucru cu obstacole în mișcare.
- Optimizarea sistemului senzorial al robotului Spy Video TRAKR în vederea creșterii
autonomiei.
- Utilizarea senzorului DT020-1 ca radar pentru observarea percepției obiectelor cu
forme neregulate.
- Generalizarea metodelor utilizate în cadrul cercetărilor experimentale pentru o gamă
mai mare de roboți mobili.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
63
BIBLIOGRAFIE
[A1] – Alexandru M., Sisteme de măsurare cu traductoare, Editura Matrixrom, 2012.
[A2] – Alexandrescu L, Acustică aplicată, Editura Orator, Braşov 2004.
[A3] – Antunes dos Santos A., Ultrasonic Waves, Publisher: InTech, 2012, ISBN 978-953-51-
0201-4.
[A4] – Armaș I., Proiectare în mecatronică și robotică, Editura A.G.I.R., 2011.
[B1] – Balasubramanian K., Arunkumar R., Object recognition and obstacle avoidance robot,
Control and Decision Conference, Pages: 3002 – 3006, june 2009.
[B2] – Barna E., Barna V., Cucu C., Miron, C., Mecanică fizică și acustică (II), Editura
Universității Bucureşti, 2010.
[B3] – Barlea N-M, Fizica senzorilor, Editura Albastra, Cluj Napoca, 2000.
[B4] – Bârsan A., – Metode numerice în inginerie. Editura Universitatii Transilvania Brasov,
2002, ISBN 973-8124-45-x.
[B5] – Benche V., Postelnicu A., Mecanica fluidelor şi maşini hidraulice – Îndrumar de
laborator. Editura Universităţii Transilvania Braşov.
[B6] – Benet G., Blanes F., Simó J. E., Pérez P., “Using infrared senzors for distance
measurement in mobile robots.” Robotics and Autonomous Systems, vol. 40, pp. 255–
266, 2002.
[B7] – Berbente C., Mitran S., Zancu S., Metode numerice, Editura Tehnică București 1997,
971-13-1135-x.
[B8] – Biber P., Duckett T., Experimental Analysis of Sample-Based Maps for Long-Term
SLAM, The International Journal of Robotics Research vol. 28 no. 1, January 2009.
[B9] – Bobancu Ș., Creaticitate și inventică, Editura Universitătii Transilvania Brașov, Brașov
2005.
[B10] – Borangiu T., Dumitrache, A.,, Anton, F. D., Programarea roboților, Editura A.G.I.R.,
2010.
[B11] – Borenstein J., H. R. Everett, L. Feng, Where am I ? Senzors and Methods for Mobile
Robot Positioning, University of Michigan, April 1996.
[B12] – Buiu C., Sisteme avansate pentru conducerea roboților autonomi, Editura Electra
(ICPE), 2003.
[B13] – Buneci M. R., Metode Numerice - aspecte teoretice şi practice, Editura Academica
Brâncuşi, Târgu-Jiu, 2009, ISBN 978-973-144-289-1.
[B14] – Burgard W., Stachniss C., Hahnel D., Mobile Robot Map Learning from Range Data
in Dynamic Environments, Autonomous Navigation in Dynamic Environments, Springer
Tracts in Advanced Robotics, Volume 35, pages: 3-28, 2007.
[C1] – Caltun O. F., Metode numerice de procesare a semnalelor, Editura Stef București, 2008,
ISBN 978-973-8961-93-7.
[C2] – Castellanos J.A., Tardós J.D., Mobile Robot Localization and Map Building - A
Multisenzor Fusion Approach, March 1, 2000.
[C3] – Castillo O., Martínez-Marroquín R., Melin P., Valdez F., Soria J., Comparative study of
bio-inspired algorithms applied to the optimization of type-1 and type-2 fuzzy controllers
for an autonomous mobile robot, Information Sciences, Volume 192, 1 June 2012.
[C4] – Călinoiu C., Senzori și Traductoare, Volumul 1, Editura Tehnică, 2009.
[C5] – Chen .Y., Shih BY., Shih C.H.,Wei C.C., The development of autonomous low-cost
biped mobile surveillance robot by intelligent bricks, Journal of Vibration and Control
vol. 18 no. 5, pages: 577-586, April 2012.
[C6] – Chilibon, I., Acustica și metodele ei de testare, Editura Știintă și Tehnică, 2009.
[C7] – Coculescu C., Solomon O., Despa R., Metode mumerice, Editura Universitară
București, 2013, ISBN 978-606-591-808-5.
[C8] – Cohen M.R., Drabkin I.E., A Source Book in Greek Science, 1948.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
64
[D1] – David J., Cheeke N., Fundamentals and Applications of Ultrasonic Waves, 2-nd
Edition, CRC Press, 2012.
[D2] – Dima V. N., Barna E., Mecanică și acustică. Probleme rezolvate. Ediția a II-a revizuită
și adăugită, Editura Universității Bucureşti, 2006, ISBN (13) 978-973-737-183-6.
[D3] – Dolga V., Construcţia traductoarelor şi senzorilor, Lito. Universitatea Politehnica din
Timişoara, Timişoara, 1996.
[D4] – Dolga V., Senzori şi traductoare, Editura Eurobit, Timișoara, 1999, ISBN: 973-99-227-
9-1.
[D5] – Drugă C., Ţârulescu R., Braun B., On the displacement measuring errors using the
coiled resistive transducers in potentiometric mounting, 2nd
International Conference
Advanced Composite Materials Engineering COMAT 2008, 9–11 October 2008,
Brasov, ISSN 1844 – 9336.
[D6] – Drugă C., Braun B., Ţârulescu R., Coiled resistive transducers with nonlinear
characteristics obtained by shunting, 2nd
International Conference Advanced Composite
Materials Engineering COMAT 2008, 9–11 October 2008, Brasov, ISSN 1844 – 9336.
[D7] – Dumitriu A., Bucşan C., Demian T., - Sisteme senzoriale pentru roboţi, Editura Medro,
Braşov, 1996.
[E1] – Enescu N., Magheti I., Sârbu M. A., Acustica Tehnică, Editura Electra (ICPE), 1998,
ISBN 973-98801-2-6.
[F1] – Fehlman W.L., Hinders M.K., Passive infrared thermographic imaging for mobile robot
object identification, Journal of Field RoboticsVolume 27, Issue 3, pages 281–310,
May/June 2010.
[F2] – Florczyk S., Robot Vision: Video-based Indoor Exploration with Autonomous and
Mobile Robots, Editura Wiley-VCH, 2005.
[G1] – Grigore L. T., Aplicații de navigație inerțială cu senzori miniaturizați, Editura SITECH,
2013.
[H1] – Hahnel D., Map building with mobile robots in dynamic environments, Robotics and
Automation, Proceedings. ICRA '03. IEEE International Conference, Pages: 1557 - 1563
vol.2, 2003.
[H2] – Hedrick W. R., Hykes D. L., Starchman D. E., Ultrasound Physics and Instrumentation,
Pageburst E-Book on VitalSource, 4th Edition, 2005, ISBN: 9780323080200.
[H3] – Holland John M., Designing Autonomous Mobile Robots: Inside the Mind of an
Intelligent Machine, December 29, 2003.
[H4] – Holger K., Willig A., Protocoale și arhitecturi pentru rețele de senzori wireless, Editura
Matrixrom, 2012.
[H5] – Hristev A., Mecanică şi Acustică, Editura APH Bucureşti, 1999.
[I1] – Ignea A., Stoiciu D., Măsurări electronice, senzori și traductoare, Editura Politehnica
Timișoara, 2007.
[J1] – Johnson M., Hayes M.J., Development and validation of a low-cost mobile robotics
testbed, Central European Journal of Engineering, Volume 2, Issue 1 , pages 50-65,
2012.
[M1] – Meyer-Delius D., Temporary maps for robots localization in semi-static environments,
Intelligent Robots and Systems (IROS), 2010 IEEE / RSJ International Conference,
Pages: 5750 – 5755, Oct. 2010.
[M2] – Meyer-Delius D., Beinhofer M., Burgard W., Occupancy Grid Models for Robot
Mappingin Changing Environments, Proceedings of the Twenty-Sixth AAAI Conference
on Artificial Intelligence, 2012.
[M3] – Muller G., Moser M., Handbook of Engineering Acoustics, Springer-Verlag
BerlinHeidelberg, 2013.
[M4] – Mătieș V., Tiuca, T., Roboti, structura cinematica si caracteristici, Editura Dacia, 1996.
[M5] – Mătieș V., Berian S., Transdisciplinaritate și mecatronică, Editura Curtea Veche, 2011.
[N1] – Nehmzow U., Mobile Robotics, A Practical Introduction, June 11, 2003, ISBN 978-
1852337261.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
65
[N2] – Niţulescu M., Sisteme robotice cu capacitate de navigaţie, Editura Universitaria
Craiova, 2002.
[L1] – Lempriere B., Ultrasound and Elastic Waves, Academic Press, 2002, ISBN: 978-0-12-
443345-8.
[L2] – Leon F., Inteligenţa artificială – principii, tehnici, aplicaţii, Editura Tehnopress, Iaşi
2007, ISBN 973-702-423-0.
[L3] – Lovasz E. C., Robotică avansată, Editura Politehnica Timișoara, 2013.
[O1] – Olteanu C. – Aparate şi sisteme de măsurare mecanice, Universitatea din Braşov, 1986;
[O2] – Olteanu C. – Mijloace mecanice şi hidropneumatice de măsurare - curs, Reprografia
Universităţii “TRANSILVANIA” Braşov, 1988;
[O3] – Olteanu C., Turcu C., Olteanu F., Zamfira, S., Braun B. – Mechatronic system for
measuring and tracing of maps concerning soil agro-productive parameters, 6th
International DAAAM Baltic Conference INDUSTRIAL ENGINEERING, 24-26 Aprilie
2008, Tallinn, Estonia, ISBN 978-9985-59-783-5;
[P1] – Patrascioiu C., Tehnici numerice de optimizare, Editura Matrixrom, București 2005,
ISBN: 973-685-953-3.
[P2] – Popa C., Pelican E., Introducere în analiza numerică, Editura Matrixrom, București,
2009, ISBN: 9736859916.
[P3] – Popescu M.C., Mastorakis N.E., Simulation of da Vinci Surgical Robot Using
Mobotsim Program, INTERNATIONAL JOURNAL OF BIOLOGY AND
BIOMEDICAL ENGINEERING, Issue 4, Volume 2, 2008.
[P4] – Popescu D., Senzori pentru roboți, Editura Electra (ICPE), 2004.
[S1] – Saracin C. G., Saracin M., Traductoare. Interfețe. Achiziții de date, Editura Matrixrom,
2010.
[S2] – Siegwart R, Introduction to Autonomous Mobile Robots, Intelligent Robotics and
Autonomous Agents series, ISBN 978-0262195027, March 5, 2004.
[S3] – Siciliano, B., Sciavicco, L., Villani, L., Oriolo, G., Modelling, Planning and Control,
2nd Printing., 2009.
[S4] – Stevanovic N., Hillegrand M., Hostica B. J., Teuner, A. - A CMOS Image Senzor for
High Speed Imaging, ISSCC Digest of Technical Papers, pages 104-105, San Francisco,
2000.
[T1] – Ţârulescu R., Crăciun O., Elemente de mecanica fluidelor şi unele aplicaţii practice,
decembrie 2009, Editura Universităţii Transilvania din Braşov ISBN 978-973-598-665-0.
[T2] – Ţârulescu R., Ţârulescu S., Infrared detection senzors for mobile robots, Academic
Journal of Manufacturing Engineering, Supplement, Issue 2 / 2008, Editura Politehnica
Timisoara, ISSN 1583-7904.
[T3] – Ţârulescu R., Ţârulescu S., Ultrasonic senzors for mobile robots, Academic Journal of
Manufacturing Engineering, Supplement, Issue 2 / 2008, Editura Politehnica Timisoara,
ISSN 1583-7904.
[T4] – Ţârulescu R., Usage of sonar and ultrasonic senzors for mobile robots orientation,
Annals of the Oradea University, Editura Universităţii din Oradea, 2005, ISSN 1583-
0691.
[T5] – Ţârulescu R., Consideraţii privind optimizarea sistemului senzorial la un robot mobil ,
International Session of Scientific Papers, EDUCATION AND SCIENTIFIC
RESEARCH AT EUROPEAN STANDARDS, Academia Forţelor Aeriene „Henri
Coandă”, Braşov 11-12 Mai 2007, ISBN 978-973-8415-45-4.
[T6] – Ţârulescu R., Ţârulescu S., Senzori ultrasonici folosiţi la navigaţia roboţilor mobili,
Sesiune de comunicări ştiinţifice cu participare internaţională, AFARES - 2008,
Academia Forţelor Aeriene „Henri Coandă”, Braşov 16-17 Mai 2008, ISBN 978-973-
8415-56-0.
[T7] – Ţârulescu R., Drugă C., Braun B., Ultrasonic senzor for distance measuring, 2nd
International Conference Advanced Composite Materials Engineering COMAT 2008,
9–11 October 2008, Brasov, ISSN 1844 – 9336.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
66
[T8] – Ţârulescu R., Drugă C., Braun B., Optical senzor for distance measuring, 2nd
International Conference Advanced Composite Materials Engineering COMAT 2008,
9–11 October 2008, Brasov, ISSN 1844 – 9336.
[T9] – Ţârulescu R., Ţârulescu S., Disturbing factors influence in ultrasonic senzor detection,
Editura Universitatii din Oradea, ISSN 1583-0691, ANNALS of the ORADEA
UNIVERSITY, 2012.
[T10] – Ţârulescu R., Ţârulescu S., Distance measurements with ultrasonic senzor DT020-1,
Editura Universitatii din Oradea, ISSN 1583-0691, ANNALS of the ORADEA
UNIVERSITY, 2012.
[T11] – Ţârulescu R., Usage of Parallax ultrasonic senzors in distance measuremnts, Editura
Universitatii din Oradea, ISSN 1583-0691, ANNALS of the ORADEA UNIVERSITY,
2013.
[T12] – Ţârulescu R., Olteanu C., Ţârulescu S., Texture of material influence at ultrasonic
detection, Editura Universitatii din Oradea, ISSN 1583-0691, ANNALS of the ORADEA
UNIVERSITY, 2014.
[T13] – Ţârulescu R., Ţârulescu S., Olteanu C., Vehicle pollution for cold engine functioning,
Editura Universitatii din Oradea, ISSN 1583-0691, ANNALS of the ORADEA
UNIVERSITY, 2014.
[T14] – Toth-Tascău M., Drăgulescu D., Planificarea și generarea mișcării roboților, Editura
Orizonturi Universitare Timișoara, 2002.
[T15] – Toth-Tascău M., Dreucean M., Elemente de robotică, Editura Politehnica Timișoara,
2008.
[U1] – Ungureanu V. B., Ţârulescu R., Crăciun O., Maşini şi aparate fluidice, decembrie
2012, Editura Universităţii Transilvania din Braşov ISBN 978-606-19-0144-9.
[V1] – Vasiu D., Olteanu C., Roşca I., Iordache P. – Senzori şi traductoare – traductoare
giroscopice, Braşov, 1992.
[Z1] – Zaides E. P., Traductoare și senzori, Editura Electra (ICPE), 2002.
[***1] – Fourier Senzors Guide. Fourth Edition. Printed in March 2004. page 50.51.
[***2] – Catalog MultiLogPRO.
[***3] – Workbook FP 1120. Senzors for Distance and Displacement. FESTO.
[***4] – Catalog senzor ultrasonic Parallax PING.
[***5] – Catalog platformă de procesare Arduino.
[***6] – http://www.arduino.cc/en/Tutorial/Ping.
[***7] – Catalog Alnor Airflow, Air Velocity Meter, model AVM460.
[***8] – User manual Pro Bot 128 robot.
[***9] – http://www.spytrakr.net.
[**10] – KSR4 – "ESCAPE" ROBOT KIT – Velleman Components, Catalog.
[**11] – http://www.mobotsoft.com/?page_id=98.
[**12] – http://learn.parallax.com/print/book.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
67
REZUMAT
Pe baza analizei limitelor stadiului actual s-a definit obiectivul acestei teze: optimizarea
sistemului senzorial al unui robot mobil în vederea îmbunătăţirii comportamentului la
orientarea în spaţiul de lucru.
Pentru atingerea obiectivelor tezei s-au efectuat teste cu şase roboţi mobili în vederea
observării comportamentului acestora în două spaţii de lucru, unul cu obstacole fixe şi unul de
tip labirint şi s-au efectuat măsurători de distanţă cu trei tipuri de senzori ultrasonici faţă de
obiecte de diferite dimensiuni, forme şi materiale. Rezultatele obţinute au fost modelate atât
matematic, cât şi prin simulare cu ajutorului unui software dedicat roboţilor mobili. În urma
analizei rezultatelor obţinute prin modelare, s-a identificat robotul mobil care poate fi supus
optimizării şi tipul de senzor care poate fi implementat cu succes în sistemul senzorial. Astfel a
fost optimizat robotul mobil de tip Pro Bot 128, adăugându-se un sistem nou senzorial, de tip
Parallax. În urma efectuării testelor cu robotul optimizat s-a observat ca distanţa parcursă dintre
un punct de pornire şi unul de sosirere s-a redus semnificativ.
Etapele parcurse pentru stabilirea soluţiei optime sunt: 1) Analiza stadiului actual în
domeniul roboţilor mobili; 2) Stabilirea obiectivelor tezei; 3) Cercetări experimentale efectuate
cu roboţii mobili şi cu senzorii ultrasonici; 4) Modelarea numerică a rezultatelor obţinute în
urma cercetărilor experimentale şi simularea navigaţiei unui robot mobil utilizând senzori
ultrasonici cu caracteristici asemănătoare celor testaţi; 5) Optimizarea unui robot mobil prin
implementarea unui senzor ultrasonic montat pe o platformă rotativă şi testarea acestuia în
spaţiile de lucru; 6) Concluzii finale, contribuţii originale şi direcţii de dezvoltare.
Din analiza rezultatelor se desprinde ideea că că implementarea unui sistem senzorial cu
senzori ultrasonici se poate realiza pentru o multitudine de roboţi, fiind recomandată la detecţia
obstacolelor din spaţiul de operare.
ABSTRACT
Based on an analysis of the current stage limits, it was defined the objective of this thesis:
optimizing the sensorial system of a mobile robot to improve navigation behavior in the
workspace.
In order to achieve the objectives of this thesis, has been performed tests with six mobile
robots in order to observe their behavior in the two working spaces, one with fixed obstacles,
and one of labyrinth type and distance measurements were made with three types of ultrasonic
sensors over the objects with different sizes, shapes and materials. The results were modeled
mathematically and simulated by using dedicated software for mobile robots. After analyzing
the results obtained by modeling, it was identified the mobile robot which can be optimized
and the type of sensor that can be successfully implemented in the sensorial system. Thus was
optimized the mobile robot Pro Bot 128, adding a new sensorial system of Parallax type. After
the optimized robot test it was observed that the distance between a starting point and an arrival
has reduced significantly.
The steps for determining the optimal solution are: 1) Analysis of current stage in mobile
robotics; 2) Establishing objectives of the thesis; 3) Experimental research performed with
mobile robots and ultrasonic sensors; 4) Numerical modeling of results from experimental
research and simulation of navigation for a mobile robot using ultrasonic sensors with
characteristics similar to those tested; 5) Optimizing a mobile robot by implementing an
ultrasonic sensor mounted on a rotating platform and testing in workspaces; 6) Conclusions,
original contributions and directions of development.
From the results emerges the idea that the implementation of a sensorial system with
ultrasonic sensors can be achieved for a variety of robots, being recommended to detect
obstacles in the operating area.

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
68
CURRICULUM VITAE
DATE PERSONALE
NUME Radu ȚÂRULESCU
ADRESA Str. Matei Basarab, Nr. 88, Boc b8, Ap. 11, Brașov, România
TELEFON 0727576747
E-mail [email protected]
DATA NAȘTERII 14. 01. 1979
EDUCAȚIE
2002 – 2003 Universiatatea TRANSILVANIA Brașov
Diplomă de Studii Aprofundate
1997 – 2002 Universiatatea TRANSILVANIA Brașov
Diplomă De Inginer
EXPERIENȚĂ
PROFESIONALĂ
2007 – prezent Asistent Universitar
Universiatatea TRANSILVANIA Brașov
2003- 2007 Preparator Universitar
Universiatatea TRANSILVANIA Brașov
ACTIVITATE 2 cărți publicate în țară
ȘTIINȚIFICĂ 58 articole publicate în volumele unor conferințe din țară și
străinătate

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
69
CURRICULUM VITAE
PERSONAL
INFORMATION
NAME Radu ȚÂRULESCU
ADRESS Str. Matei Basarab, Nr. 88, Boc b8, Ap. 11, Brașov, România
PHONE NUMBER 0727576747
E-mail [email protected]
DATE OF BIRTH 14. 01. 1979
EDUCATION
2002 – 2003 TRANSILVANIA University of Brașov
Advanced Study Diploma
1997 – 2002 TRANSILVANIA University of Brașov
Mechanical Engineering
PROFESSIONAL
EXPERIENCE
2007 – prezent Teaching Assistant
TRANSILVANIA University of Brașov
2003- 2007 University Tutor
TRANSILVANIA University of Brașov
SCIENTIFIC 2 books published in Romania
ACTIVITY 58 articles published in the proceedings of conferences national
and foreign

Teză de Doctorat - Contribuţii privind optimizarea configuraţiei senzorilor utilizaţi la roboţii mobili 2014
70