Embed Size (px)
Citation preview
Towards Coastal Threat Towards Coastal Threat Evaluation Decision Evaluation Decision SupportSupport
Presentation by Jacques du Toit
Operational Research
University of Stellenbosch
3 December 2010
2/28
OverviewOverview
The Problem Machine Learning/Pattern Recognition
Classification Clustering
Learning Behavioural Patterns Application
Data Methods
Summary
3/28
Background: The ProblemBackground: The Problem
Maritime Threats Smuggling Trafficking Poaching/Illegal Fishing
Threat Evaluation Detection Prediction
Why? Limited resources Vast area
4/28
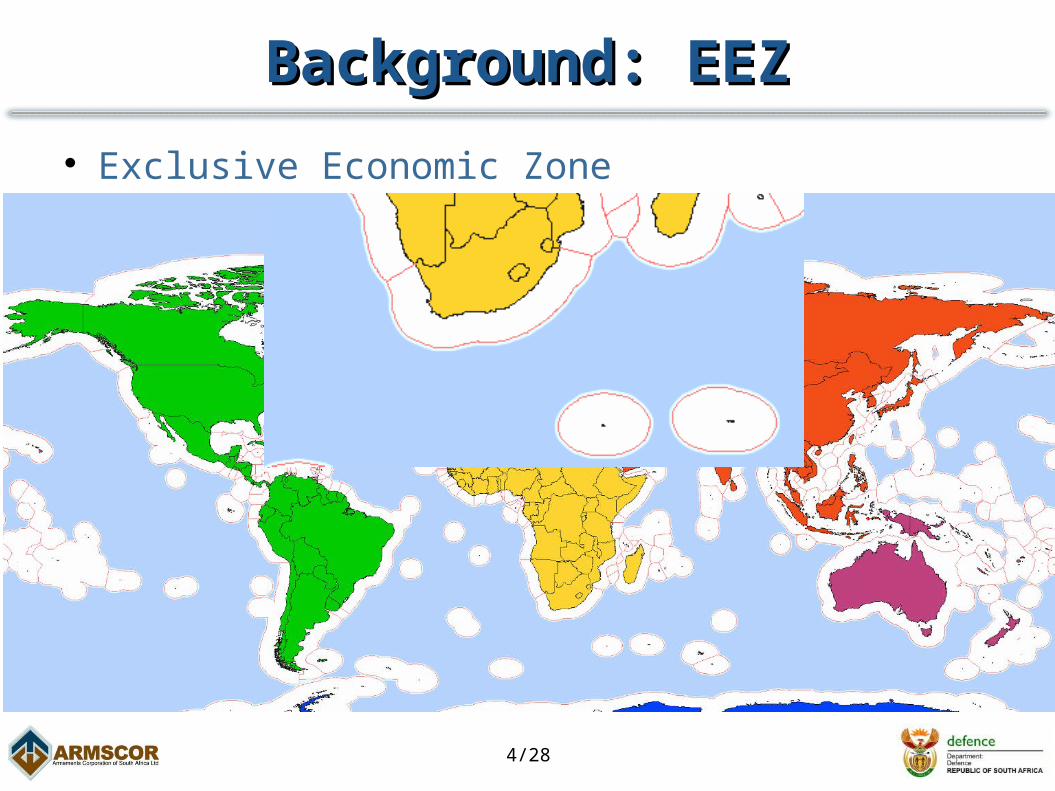
Background: EEZBackground: EEZ
Exclusive Economic Zone
5/28
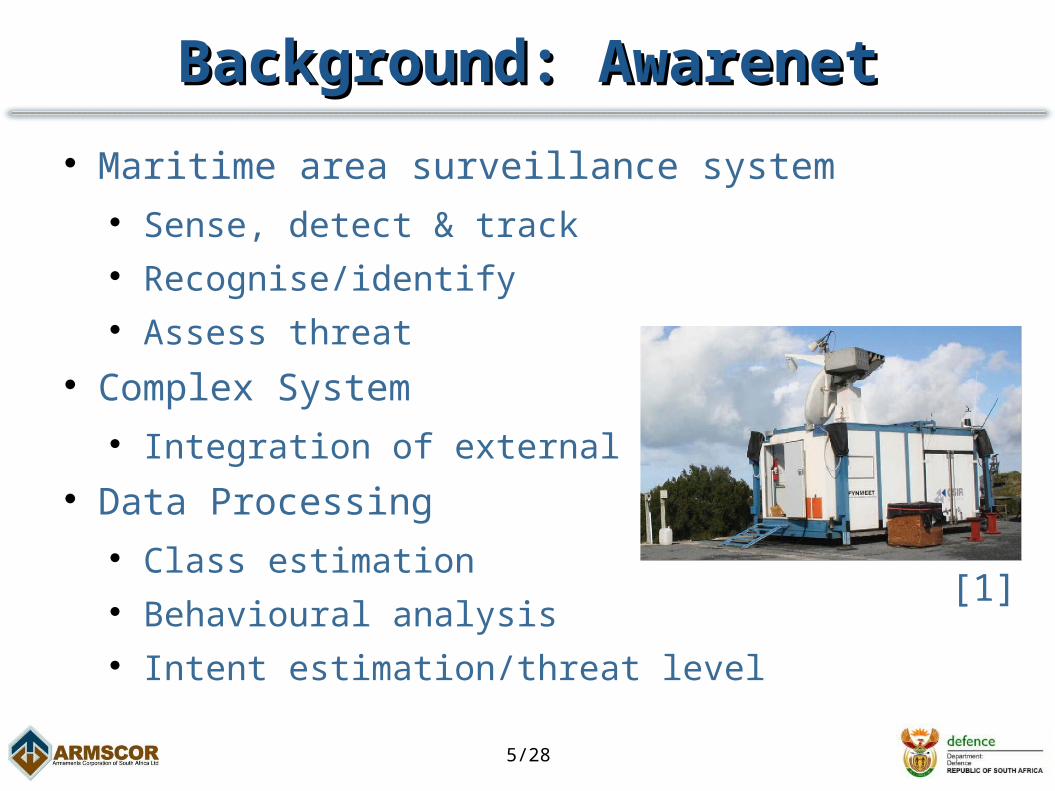
Background: AwarenetBackground: Awarenet
Maritime area surveillance system Sense, detect & track Recognise/identify Assess threat
Complex System Integration of external data
Data Processing Class estimation Behavioural analysis Intent estimation/threat level
[1]
6/28
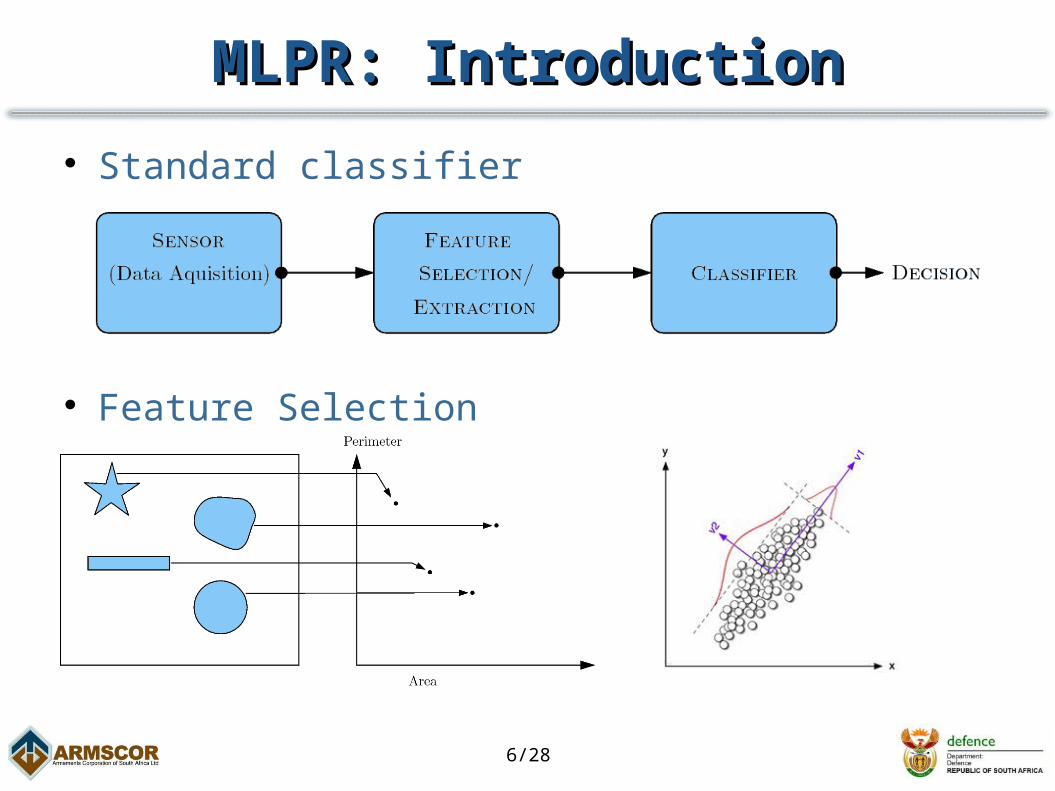
MLPR: IntroductionMLPR: Introduction
Standard classifier
Feature Selection Feature Extraction
7/28
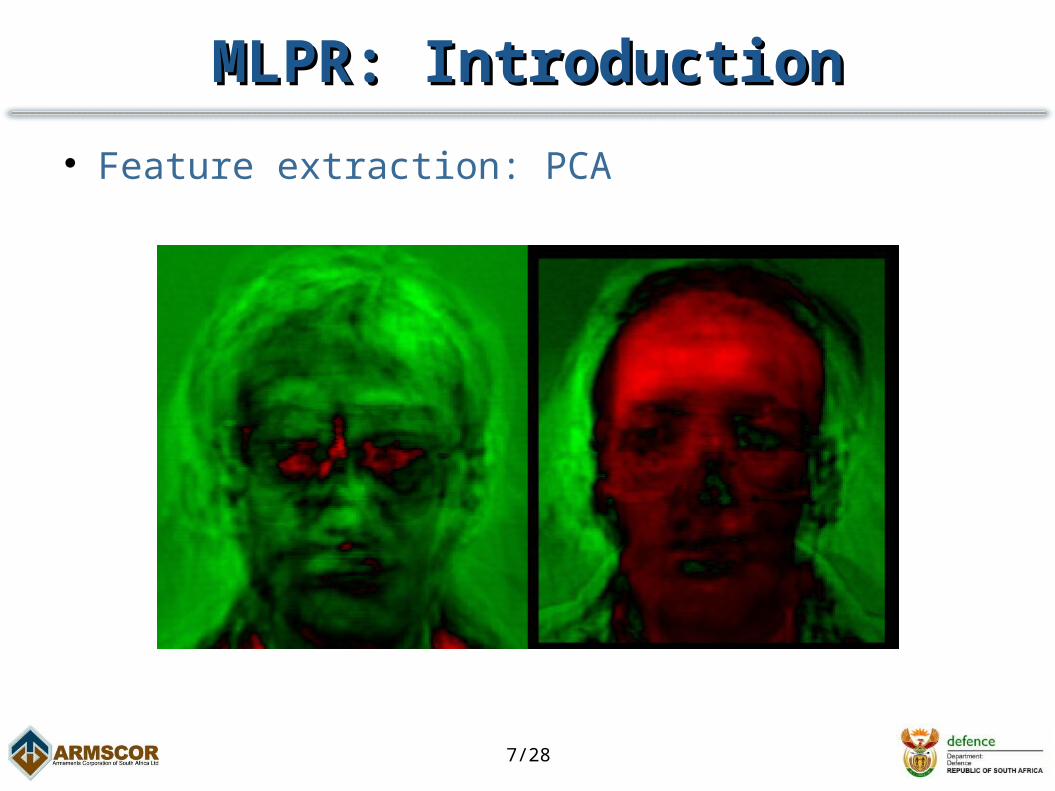
MLPR: IntroductionMLPR: Introduction
Feature extraction: PCA
8/28
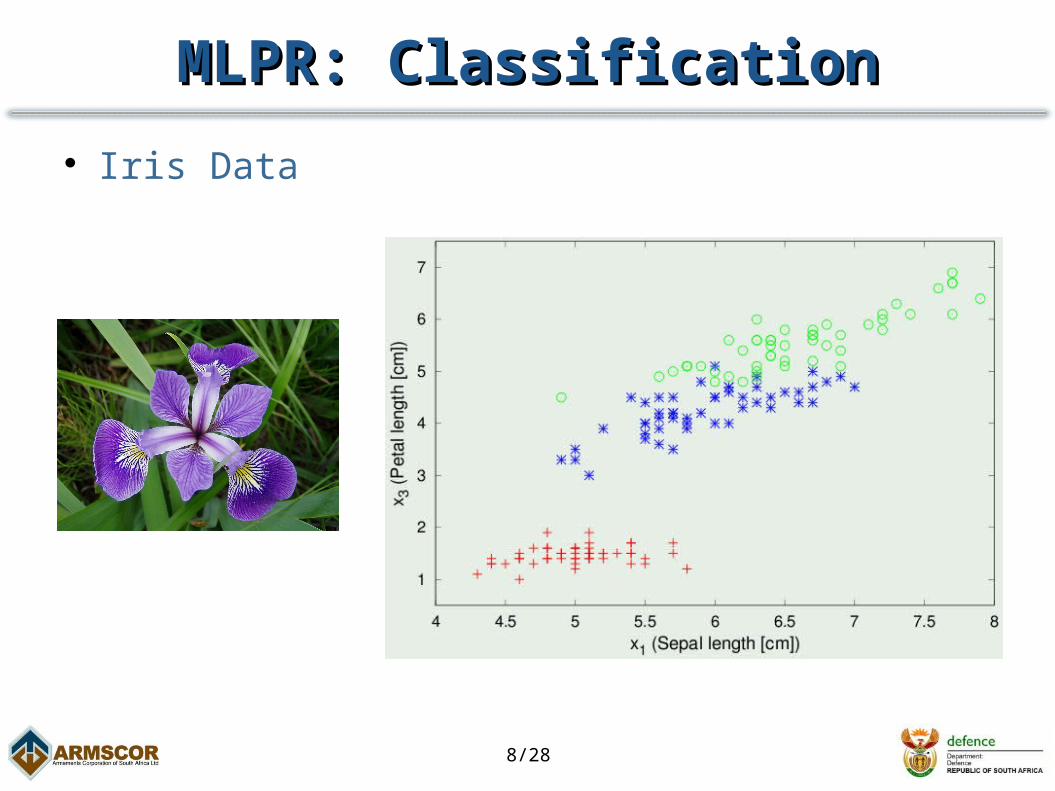
MLPR: ClassificationMLPR: Classification
Iris Data
9/28
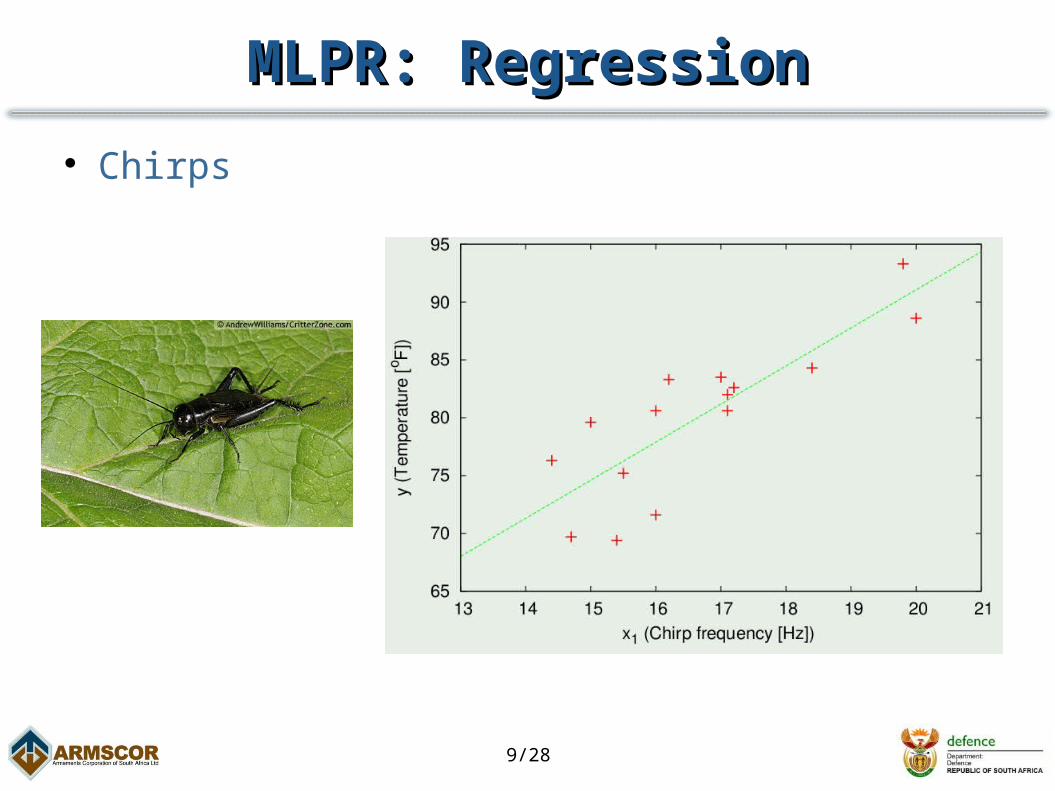
MLPR: RegressionMLPR: Regression
Chirps
10/28
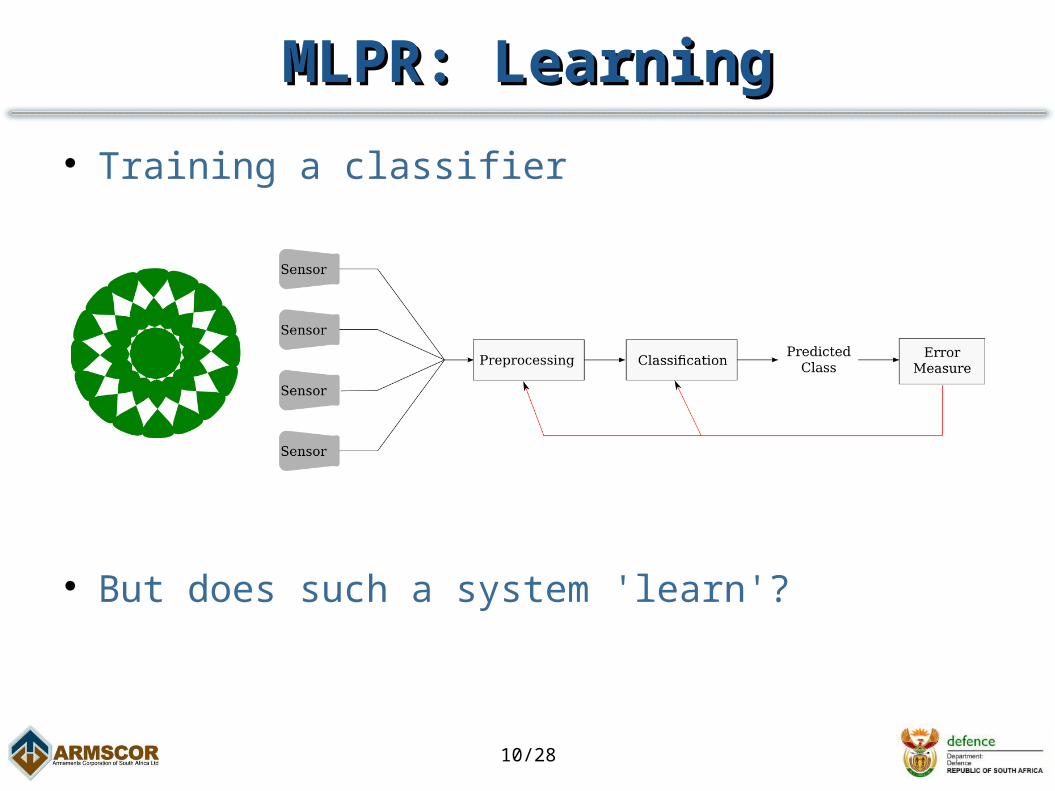
MLPR: LearningMLPR: Learning
Training a classifier
But does such a system 'learn'?
11/28
MLPR: Supervised/UnsupervisedMLPR: Supervised/Unsupervised
Supervised: Classifier trained on labelled examples Predict class of unseen instance
Unsupervised No labels System must 'discover' structure
12/28
Learning Behavioural Patterns (LBP)Learning Behavioural Patterns (LBP)
Computer Vision Video surveillance
Event Recognition Detection/classification of highway lanes
Design of virtual spaces Behaviour Analysis
Ecological modelling Pedestrian movement
13/28
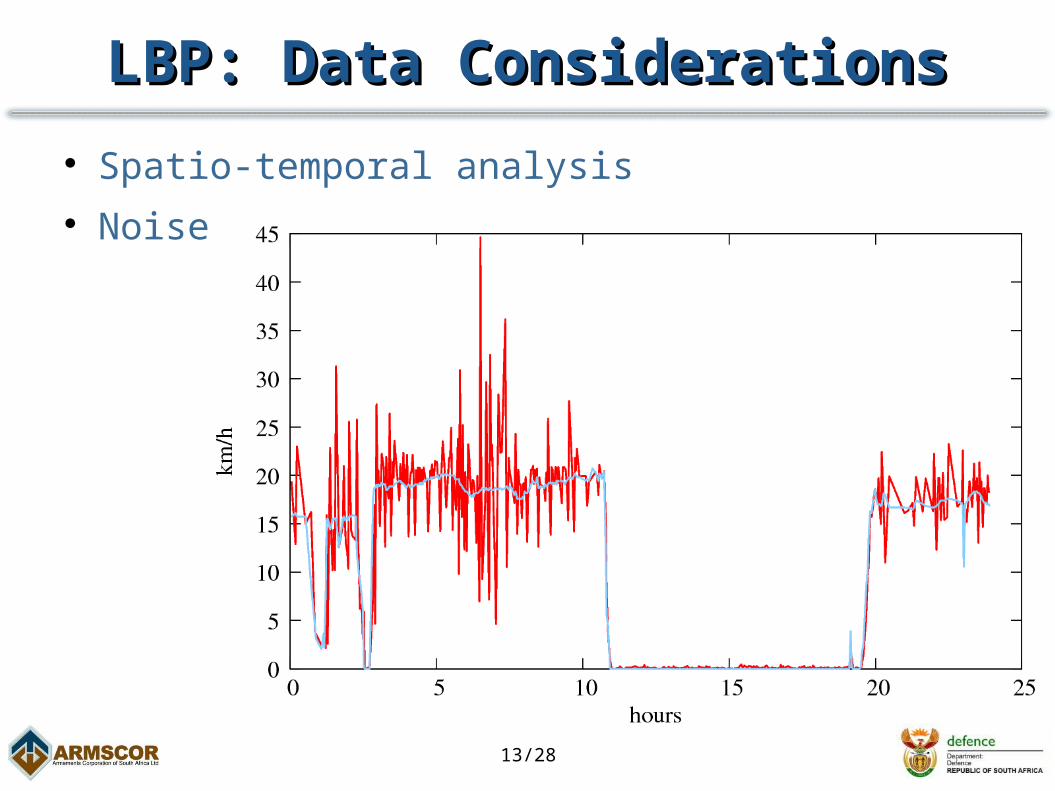
LBP: Data ConsiderationsLBP: Data Considerations
Spatio-temporal analysis Noise
14/28
LBP: Towards Coastal TELBP: Towards Coastal TE
Why this approach? Vessels movement not random Persistent sensors Volumes of data
Requirements Online Anomaly/novelty detection Flexible/robust Measure of uncertainty
15/28
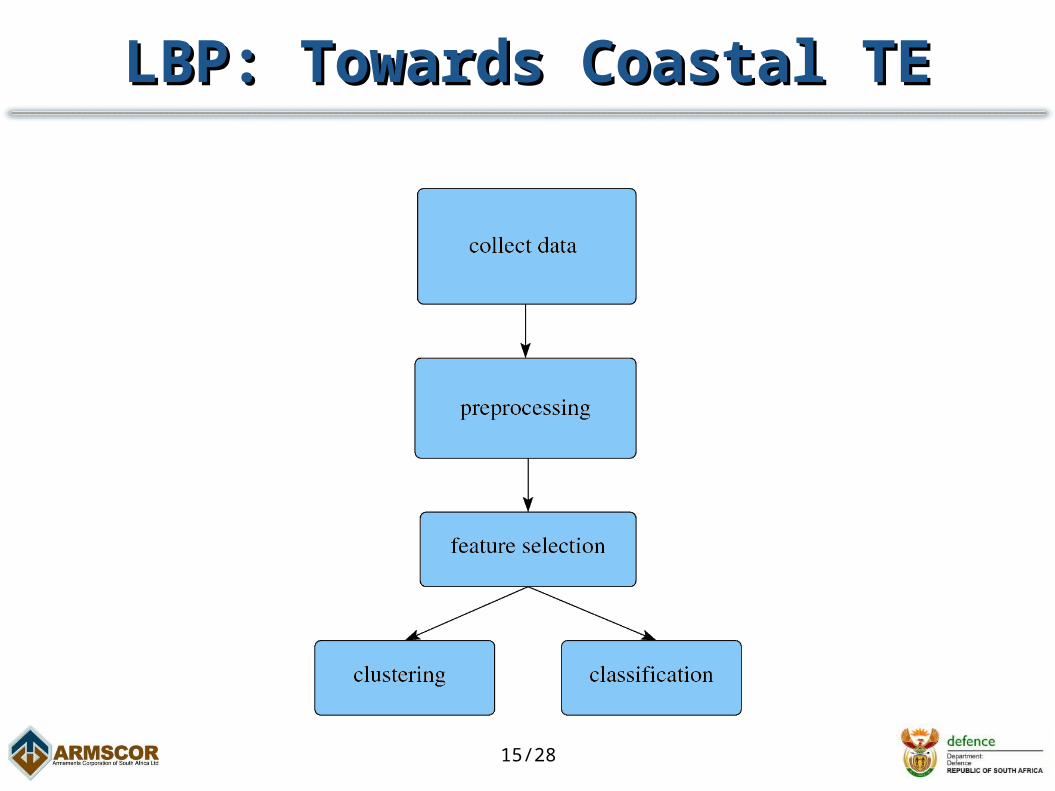
LBP: Towards Coastal TELBP: Towards Coastal TE
16/28
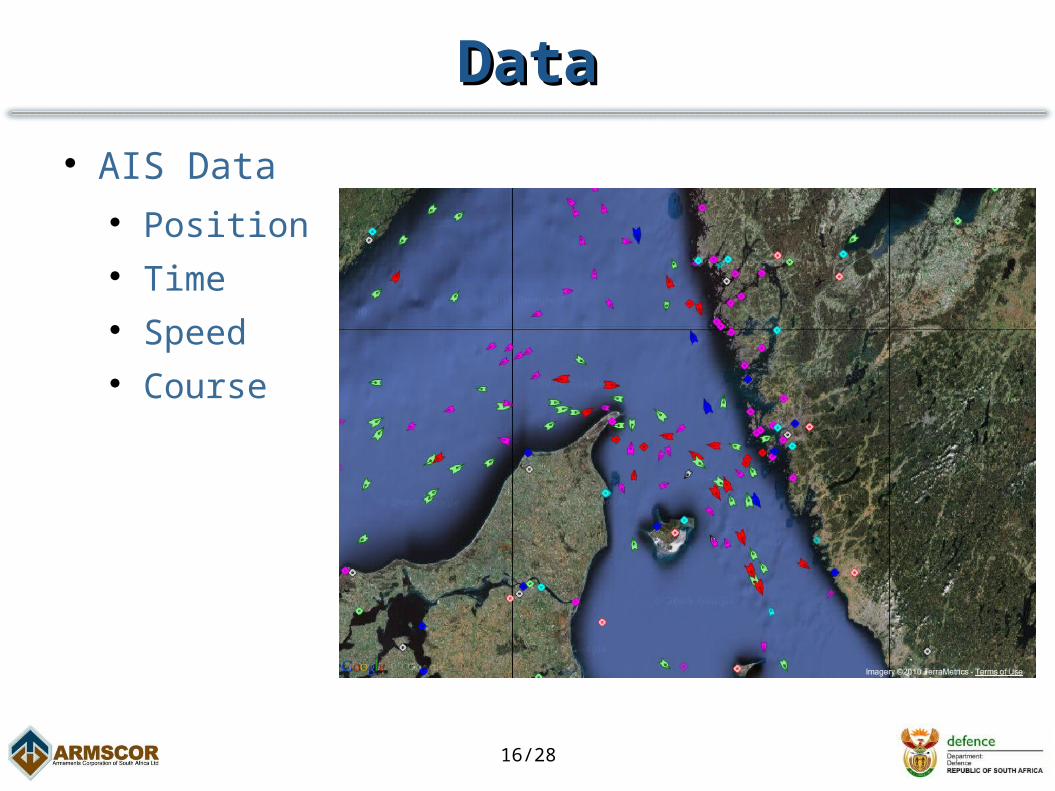
DataData
AIS Data Position Time Speed Course
17/28
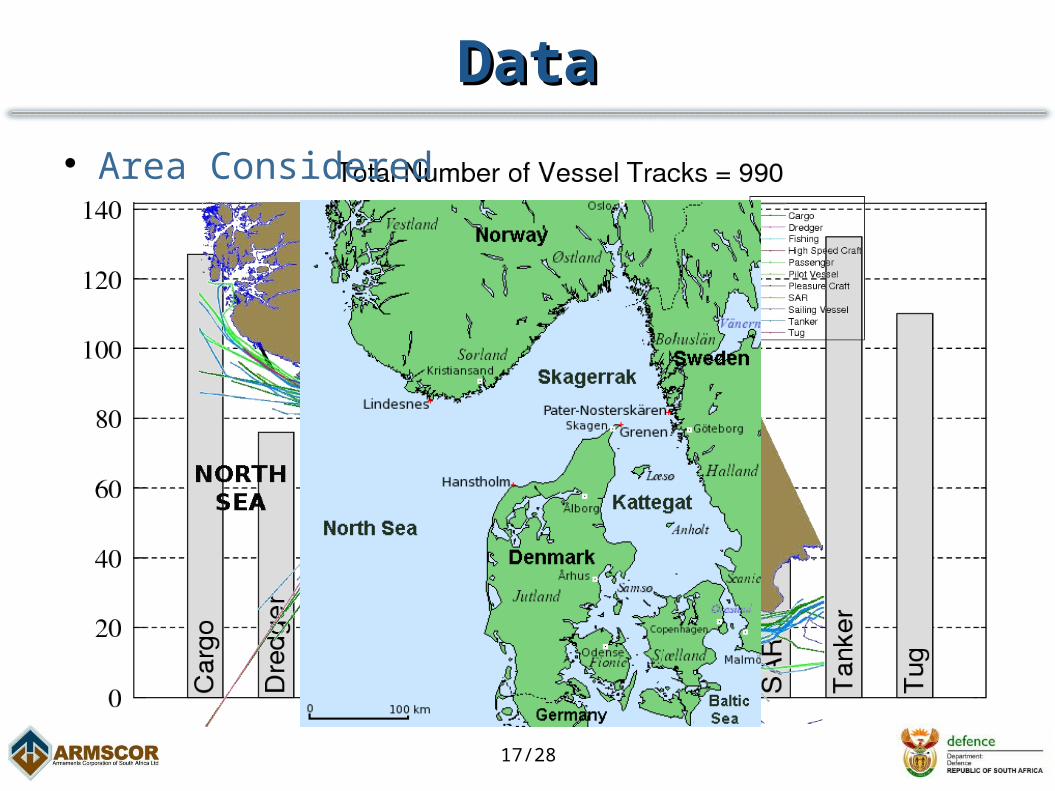
DataData
Area Considered
18/28
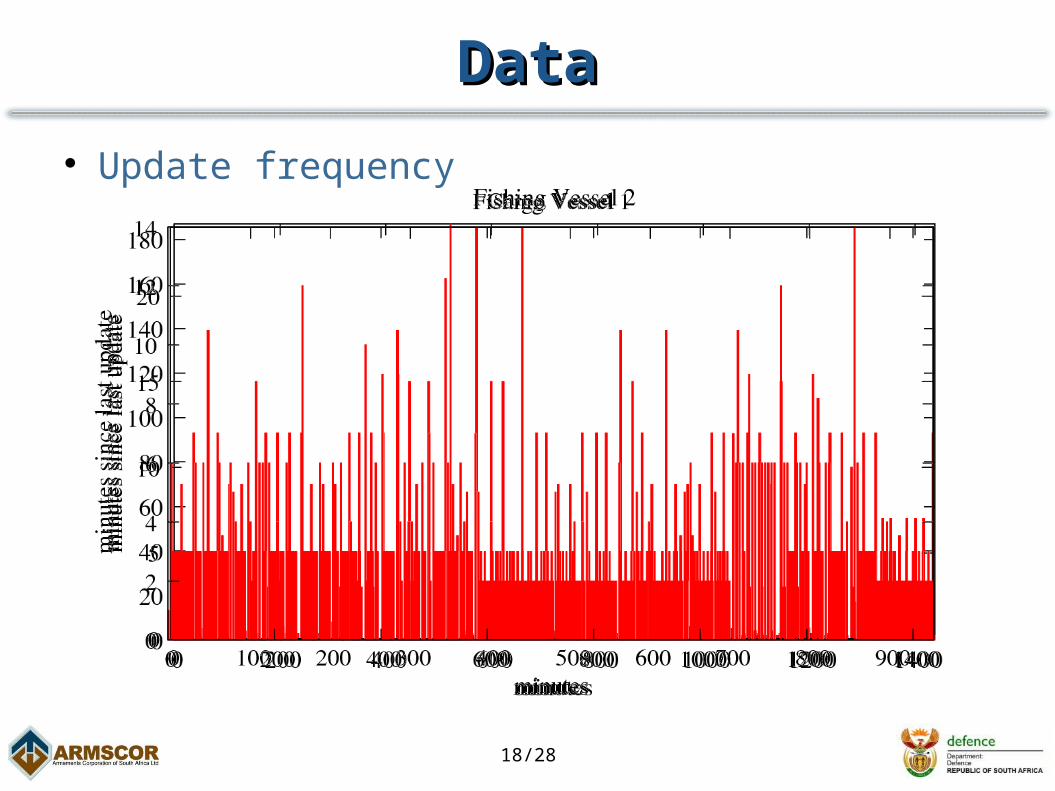
DataData
Update frequency
19/28
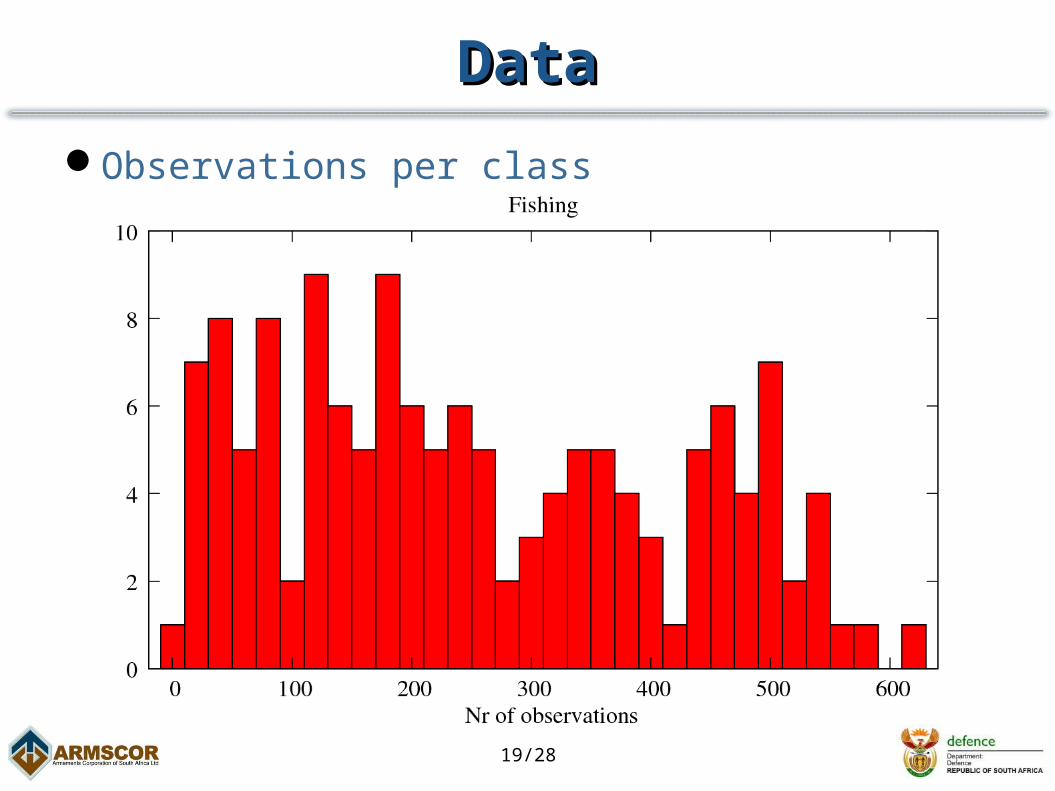
DataData
Observations per class
20/28
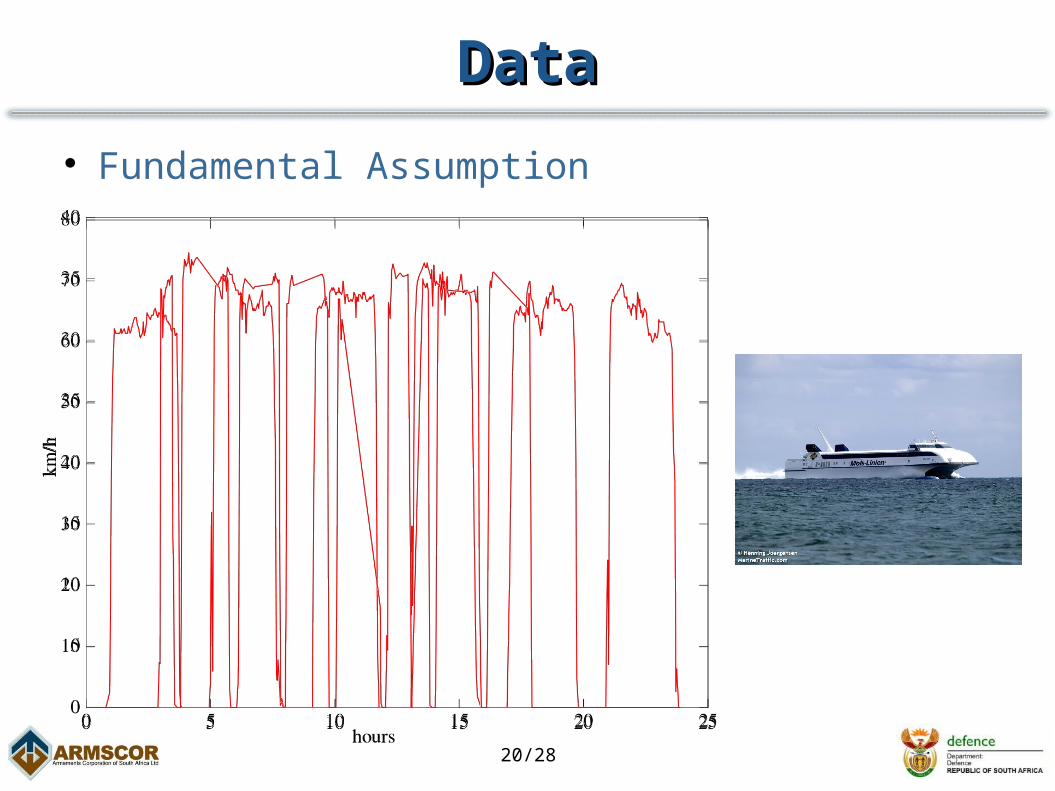
DataData
Fundamental Assumption
21/28
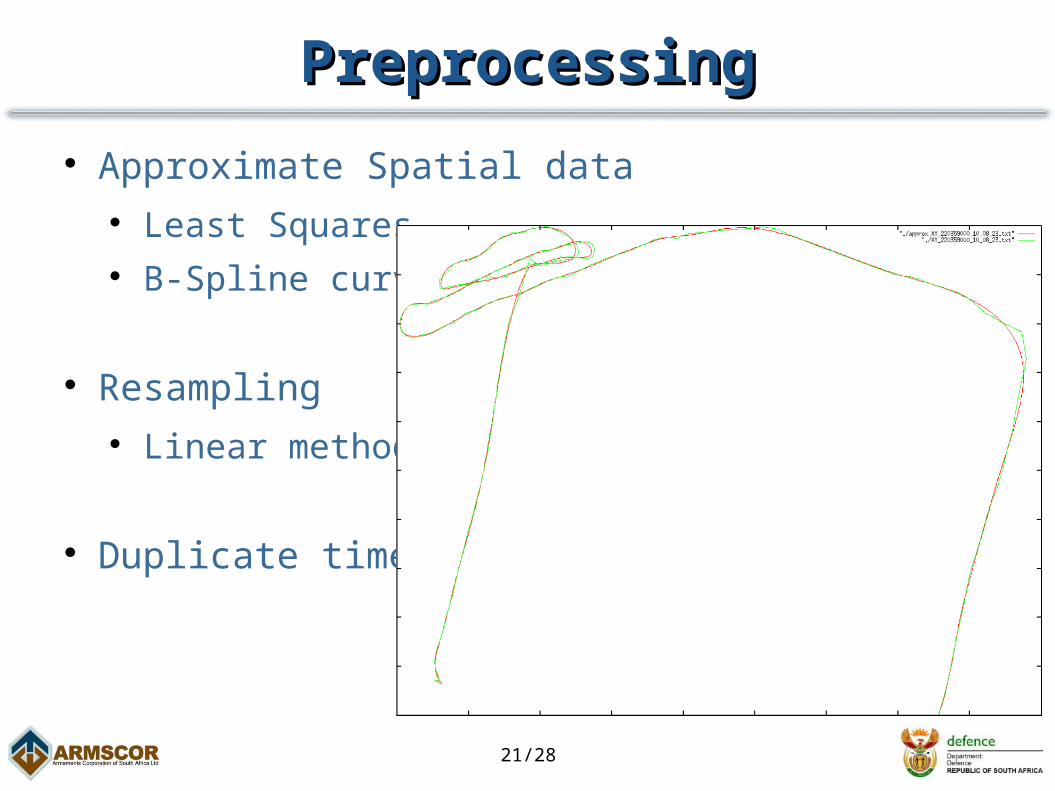
PreprocessingPreprocessing
Approximate Spatial data Least Squares B-Spline curves
Resampling Linear method
Duplicate times
22/28
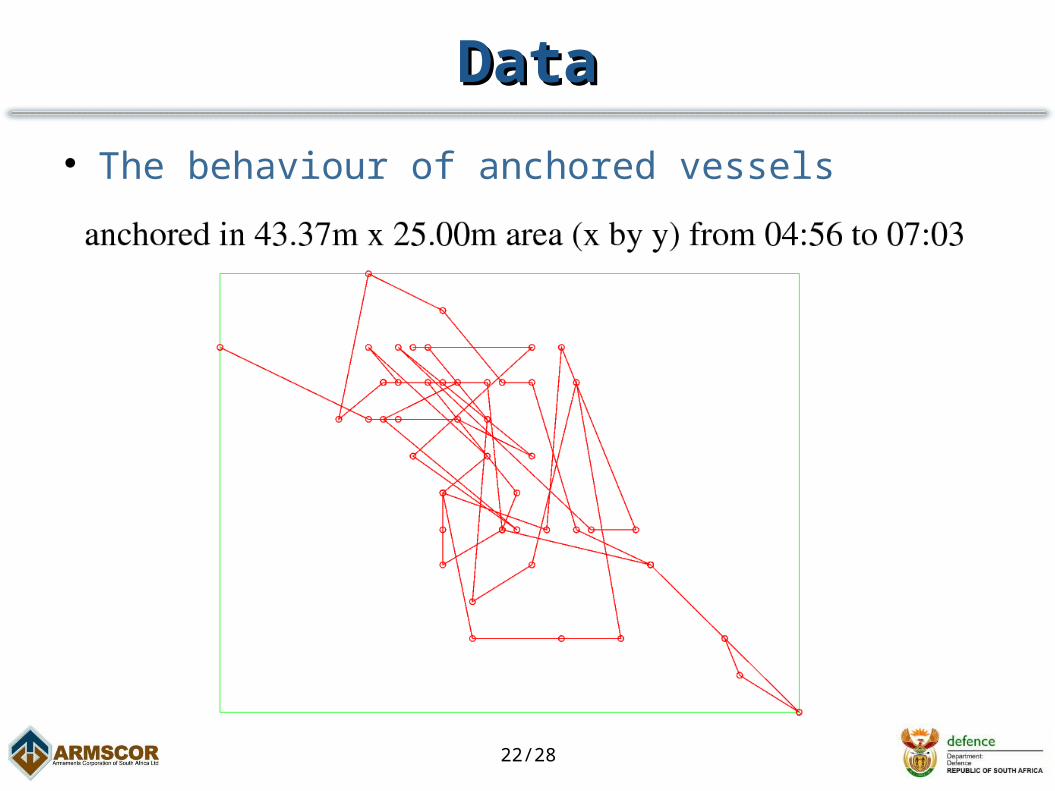
DataData
The behaviour of anchored vessels
23/28
FeaturesFeatures
Flow vectors Sinuosity and curvature Bounding box Coefficients (parametric methods)
24/28
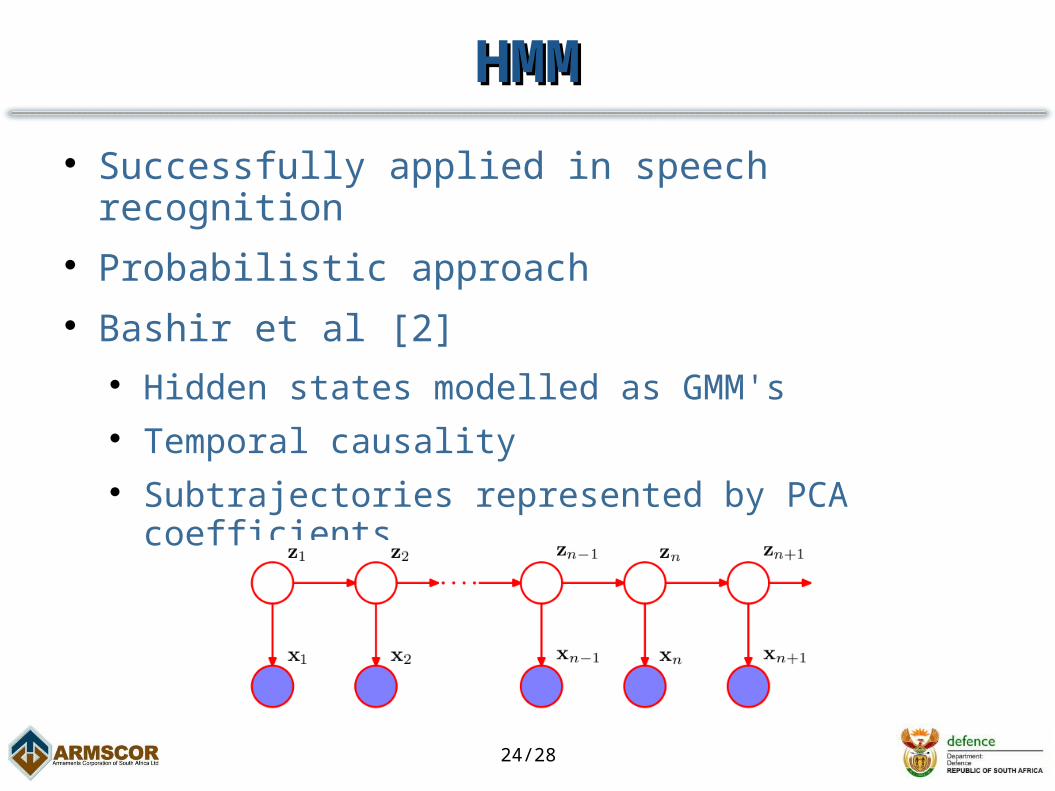
HMMHMM
Successfully applied in speech recognition Probabilistic approach Bashir et al [2]
Hidden states modelled as GMM's Temporal causality Subtrajectories represented by PCA coefficients
25/28
SOMSOM
Neural network Unsupervised learning method Online method Johnson & Hogg [3]
Construct pdf of point vectors Vector quantization
Owens & Hunter [4] Pre-process data
26/28
SummarySummary
MLPR Exploratory analysis Real-time Performance evaluation – real data High level language
27/28
QuestionsQuestions
28/28
ReferencesReferences
[1] CSIR, Awarenet: Persistent, ubiquitous surveillance technologies for enhanced national security, [Online], 2007, [Cited June 7th, 2010], Available from www.csir.co.za/dpss/pdf/protect_waters.pdf.
[2] Bashir FI, Khokhar AA & Schonfeld D, 2007, Object trajectory-based activity classification and recognition using hidden markov models, IEEE Transactions on Image Processing, 16(7), pp. 1912–1919.
[3] Johnson N & Hogg D, 1996, Learning the distribution of object trajectories for event recognition, Image and Vision Computing, 14(8), pp. 609–615.
[4] Owens, J. & Hunter, A, 2000, Application of the self-organising map to trajectory classification, Proceedings of third IEEE International Workshop on Visual Surveillance, pp. 77-83.