Embed Size (px)
Citation preview
UVOD U DIFERENCIJALNUGEOMETRIJU
Zeljka Milin Sipus, Stipe Vidak
verzija 2.4
1
Poglavlje 1
Lokalna teorija krivulja
1.1 Krivulje - definicija i primjeri
Intuitivno znamo sto smatramo krivuljom. Pravac i kruznica su najjednostavnije krivuljes kojima smo se dosad sretali. Poznate su nam njihove jednadzbe u R2, primjerice,implicitna jednadzba pravca, odnosno, kruznice radijusa r sa sredistem u (p, q)
Ax+By + C = 0, (x− p)2 + (y − q)2 = r2.
Poznate su nam i njihove parametarske jednadzbe, primjerice, koordinatni parametarskioblik jedadzbe pravca u ravnini koji prolazi tockom (p, q) i ima vektor smjera (a, b)
x = at+ p, y = bt+ q, t ∈ R,
i kruznice radijusa r sa sredistem u (p, q)
x = p+ r cos t, y = q + r sin t, t ∈ [0, 2π⟩.
Opcenito, krivulju mozemo promatrati na dva nacina: kao skup tocaka (locus) u ravniniili prostoru, odnosno, kao trag cestice u gibanju. U prvoj je situaciji, zapravo, opisujemoimplicitnom jednadzbom, a u drugoj, vremenu t pridruzujemo polozaj cestice, te krivuljuzadajemo parametarski. U diferencijalnoj geometriji krivulju obicno definiramo na ovajdrugi nacin – kao trag cestice, tj. kao glatku funkciju jednog parametra (zadanu koordinat-nim parametarskim jednadzbama). Pokazat cemo i da skup tocaka definiran implicitnomjednadzbom lokalno mozemo parametrizirati (i obrnuto).Iako krivulju zadajemo parametrizacijom, dakle, preslikavanjem, cilj nam je prouciti ”geo-metrijska svojstva krivulja”, tj. ona svojstva koja ne ovise o parametrizaciji, nego osvojstvima definiranog skupa tocaka.
Definicija 1.1.1 Krivulja (parametrizirana krivulja) c u Rn je glatko preslikavanje s otvo-renog intervala I = ⟨a, b⟩ ⊂ R u Rn
c : ⟨a, b⟩ → Rn.
2

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 3
Za krivulje u R3 (analogno u R2, tj. Rn) pisat cemo
c(t) = (x(t), y(t), z(t)),
te za derivacijedc
dt(t) = c(t) = (x(t), y(t)), z(t)),
d2c
dt2(t) = c(t) = (x(t), y(t)), z(t)) itd.
Slika krivulje c je podskup c(I) ⊂ Rn. U diferencijalnoj geometriji promatramo svojstvakrivulje koja su vezana uz njezinu sliku c(I).
Napomena. Krivulju mozemo definirati i kao preslikavanje klase Ck, stovise i klaseC0, no u elementarnoj diferencijalnoj geometriji uobicajeno je promatrati glatke krivulje(odnosno krivulje klase C∞).
Primjer 1. Pravac c : R → Rn,
c(t) = p+ tq, p, q ∈ Rn.
Primjer 2. Kruznica c : [0, 2π⟩ → R2 radijusa r sa sredistem u (p, q)
c(t) = (p+ r cos t, q + r sin t).
Primjer 3. Neka je f : I → R, I ⊂ R, glatka funkcija. Tada je c : I → R2, c(t) = (t, f(t))glatka krivulja. Drugim rijecima, grafovi glatkih funkcija su krivulje. Primjerice, parabola(ili njezin dio) (f(t) = t2, g(t) =
√t), sinusoida, (f(t) = sin t, g(t) = cos t), graf racionalne
funkcije-hiperbola (f(t) = at ), itd.
Primjer 4. (Obicna) cilindricna spirala c : R → R3
c(t) = (a cos t, a sin t, bt), a > 0
Slika 1.1: Desna (b > 0) i lijeva (b < 0) cilindricna spirala
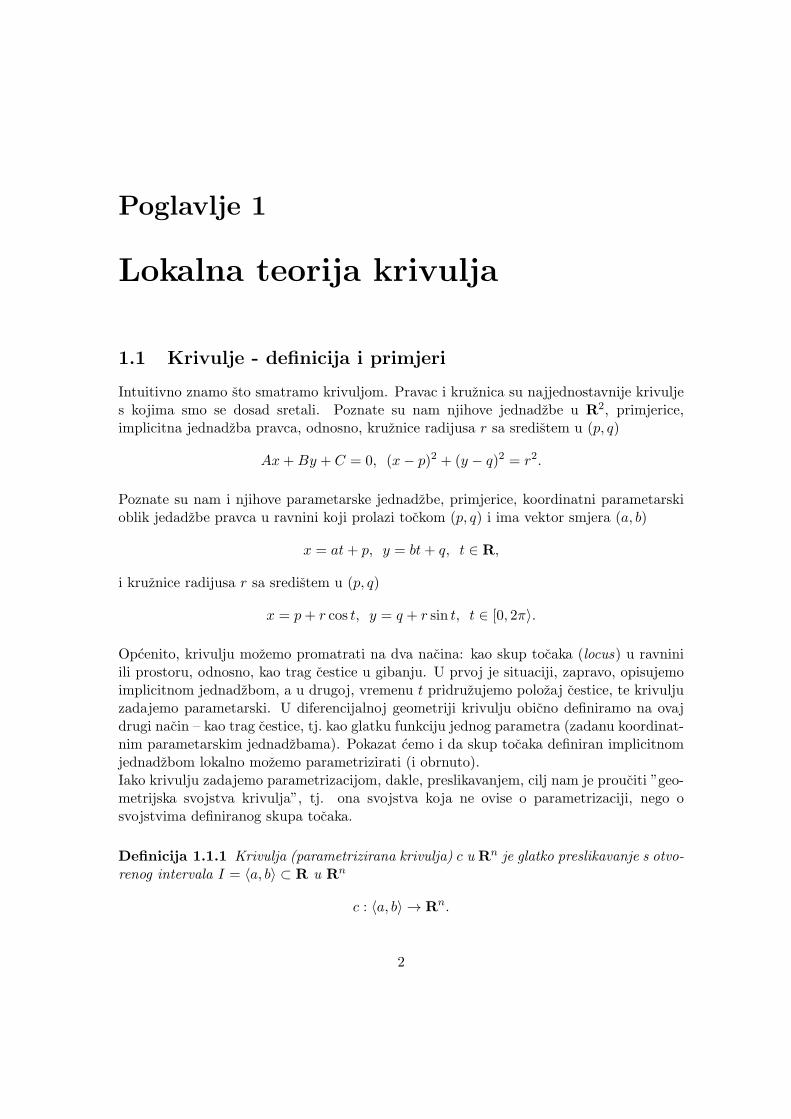
Primjer 5. Prostorna kubna parabola c : R → R3
c(t) = (t, t2, t3).
POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 4
Slika 1.2: Prostorna kubna parabola
Primjer 6. Vivijanijev prozor (Vivijanijeva krivulja) c : R → R3
c(t) = r(1 + cos t, sin t, 2 sint
2).
Slika 1.3: Vivijanijev prozor
Promotrimo sada implicitno zadane krivulje. Neka je C skup tocaka (krivulja) u ravnini
C = {(x, y) ∈ R2 : F (x, y) = 0}.
Ukoliko promatramo {(x, y) ∈ R2 : F (x, y) = c, c ∈ R}, krivulje definirane na taj nacinnazivamo nivo-krivuljama.
Primjer 7. (Jedinicna) kruznica zadana jednadzbom x2 + y2 = 1, elipsax2
a2+
y2
b2= 1,
hiperbolax2
a2− y2
b2= 1, parabola y2 = 2px. Opcenitije, ukoliko je F polinom drugog
stupnja u varijablama x, y, tada skup C nazivamo krivuljom drugog reda.
U prostoru, krivulju zadajemo dvjema jednadzbama
C = {(x, y, z) ∈ R3 : F (x, y, z) = 0, G(x, y, z) = 0},

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 5
odnosno, kao presjek dviju ploha.
Primjer 8. Pravac je presjek dviju ravnina
Aix+Biy + Ciz +Di = 0, i = 1, 2.
Vivijanijev prozor je presjek sfere x2+ y2+ z2 = 4r2 i kruznog cilindra (x− r)2+ y2 = r2.
Slika 1.4: Vivijanijev prozor kao presjek sfere i dirnog kruznog cilindra
Pokazat cemo, jednostavnosti radi samo za krivulje u R2, da se svaka krivulja zadanaimplicitnom jednadzbom moze lokalno parametrizirati. Uvedimo prvo pojam regularnihkrivulja.
Definicija 1.1.2 Krivulju c : I → Rn nazivamo regularnom ako je c(t) = 0, t ∈ I. Tockukrivulje za koju je c(t) = 0 nazivamo singularnom.
Teorem 1.1.3 Neka je F : R2 → R glatka funkcija, te neka je
C = {(x, y) ∈ R2 : F (x, y) = 0} = ∅.
Nadalje, neka ∂F/∂x i ∂F/∂y nisu istovremeno 0 u tockama skupa C i neka je P ∈ C. Tadapostoji otvoreni interval I ⊂ R oko 0 i regularna (parametrizirana) krivulja c definiranana I takva da je c(0) = P i c(I) ⊂ C.
Dokaz. Neka je P = (x0, y0) i neka je bez smanjenja opcenitosti
∂F
∂y(x0, y0) = 0.
Tada po Teoremu o implicitno zadanim funkcijama, postoji otvorena okolina I oko x0 iotvorena okolina J oko y0 i jedinstvena glatka funkcija f : I → J takva da vrijedi
F (x, f(x)) = 0, x ∈ I.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 6
Kazemo da smo F (x, y) = 0 (lokalno) eksplicitno ”rijesili po y” te pisemo y = f(x). Sadastavimo
c(t) = (t, f(t))
i pritom t namjestimo tako da je c(0) = (x0, y0) = P . Dobivena krivulja c je ocitoregularna, c(t) = (1, f ′(t)) = 0.Analogno bismo postupili u slucaju da je ∂F
∂x (x0, y0) = 0.
Parametrizirana krivulja cija je slika sadrzana u nekoj nivo-krivulji, naziva se parametri-zacija (dijela) od C.
Primjer 9. Parametrizacija gornjeg dijela jedinicne kruznice x2 + y2 = 1
c(t) = (t,√1− t2), t ∈ ⟨−1, 1⟩.
Tocke t = ±1 smo iskljucili kako bi c bilo glatko preslikavanje. Donju polukruznicuparametriziramo sa c(t) = (t,−
√1− t2), lijevu sa c(t) = (−
√1− t2, t), a desnu sa c(t) =
(√1− t2, t).
Pokazimo sada jos i obratno, ako je c : I → R2 parametrizirana krivulja, tada mozemonaci njezinu (lokalnu) implicitnu jednadzbu. To cemo uciniti ”eliminacijom parametra”.
Teorem 1.1.4 c : I → R2 regularna parametrizirana krivulja i neka je c(t0) = (x0, y0)jedna njezina tocka. Tada postoje otvoreni intervali U oko x0 i V oko y0 i glatka funkcijaF : U × V → R za koju ∂F/∂x i ∂F/∂y nisu istovremeno nula na U × V , te vrijedic(I ′) ⊂ C, na nekom podskupu I ′ ⊂ I.
Dokaz. Neka je c : I → R2, c(t) = (u(t), v(t)). Pisemo x = u(t), y = v(t). Kako je cregularna krivulja, c(t) = 0, to je derivacija barem jedne koordinatne funkcije razlicita od0 za neki parametar t0 = 0. Primjerice, neka je u(t0) = 0. Tada, po Teoremu o inverznojfunkciji, postoji otvorena okolina U tocke t0 i otvorena okolina V tocke u0 = u(t0), u(U) =V , te postoji glatka inverzna funkcija, t = u−1(x) := h(x). Sada stavimo
y = v(t) = v(h(x)),
te je trazena funkcija F
F (x, y) = y − v(h(x)) = 0, x ∈ U, y ∈ V.
Ocito je takoder ∂F/∂y = 0 na U × V .
Definicija 1.1.5 Neka je c : I → Rn regularna krivulja. Tada vektor c(t) nazivamotangencijalnim vektorom ili vektorom brzine krivulje c u tocki c(t). Funkciju ||c(t)|| nazi-vamo brzinom krivulje c u tocki c(t). Za krivulju c kazemo da je jedinicne brzine ili da jeparametrizirana duljinom luka ako je
||c(t)|| = 1, t ∈ I.
Pravac koji prolazi tockom c(t) i kojemu je c(t) vektor smjera nazivamo tangentom krivuljec u tocki c(t).

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 7
Definicija 1.1.6 Funkcija duljine luka krivulje c od tocke c(t0) je funkcija s
s(t) =
∫ t
t0
||c(u)||du, t0 ∈ I.
Duljina luka krivulje c : ⟨a, b⟩ → Rn je realan broj
s =
∫ b
a||c(u)||du
Uocimo ako je c : ⟨a, b⟩ → Rn krivulja jedinicne brzine (parametrizirana duljinom luka),tada je duljina luka od c jednaka duljini intervala I
s =
∫ b
adu = b− a.
Definicija 1.1.7 (Parametrizirana) krivulja c : I → Rn naziva se reparametrizacijom(parametrizirane) krivulje c : I → Rn ako postoji glatki difeomorfizam φ : I → I za kojivrijedi c = c ◦ φ tj.
c(t) = c(φ(t)) = c(t), t ∈ I , t ∈ I.
Uocimo da derivacija inverza
d(φ−1)(t)
dt= (φ−1)·(t) =
1
φ(t)
postoji i neprekidna je, stoga je posebno φ(t) = 0. Odavde slijedi da ako je c regularnakrivulja, tada je i njena reparametrizacija c regularna. Zaista, koristenjem lancanog pravilaza derivaciju kompozicije dobivamo
˙c(t) =d(c)(t)
dt=
d(c(φ(t)))
dt=
d(c(t))
dt
dφ(t)
dt= c(t)φ(t) = 0. (1.1.1)
Reparametrizacija omogucuje promatrati isti skup c(I) = c(I) ⊂ Rn te utvrditi njegovageometrijska svojstva. Na primjer, takva su svojstva sljedeca:
Propozicija 1.1.8 Neka je c : I → Rn reparametrizacija regularne krivulje c : I → Rn.
(a) Neka je Tc :=c
||c||, Tc jedinicno tangencijalno polje od c odnosno od c. Tada vrijedi
Tc(t) = ±Tc(t).
(b) Duljina luka od c jednaka je duljini luka od c.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 8
Dokaz. (a) Koristenjem (1.1.1) imamo
Tc =dcdt φ
||dcdt φ||=
dcdt φ
||dcdt || |φ|= ±Tc.
(b) Tvrdnja slijedi zamjenom varijabli u integralu. Zaista, neka je I = ⟨a, b⟩, I = ⟨a, b⟩.Za zadanu krivulju c : I → Rn, neka je c : I → Rn njena reparametrizacija funkcijom(glatkim difeomorfizmom) φ : I → I,
c = c ◦ φ.
Pokazali smo da je φ(t) = 0, t ∈ I. Pretpostavimo da je φ(t) > 0, t ∈ I.
Sada je ∫||dc(t)
dt||dt =
∫||dc(t)
dtφ(t)||dt =
∫||dc(t)
dt|| φ(t)dt.
Iz φ(t) = t slijediφ(t)dt = dt,
te je, prema tome, integral jednak ∫||dc(t)
dt||dt.
Jos trebamo pripaziti na granice integracije. Kako je φ : I → I rastuca bijekcija, to jeφ(a) = a, φ(b) = b, pa smo dobili∫ b
a||dc(t)
dt||dt =
∫ b
a||dc(t)
dt||dt.
U slucaju kad je φ(t) < 0 (φ je padajuca bijekcija), imamo dvaput negativni predznak –jednom kod |φ(t)| = −φ(t), a drugi put kod zamjene granica integracije.
Teorem 1.1.9 Svaka se regularna krivulja c moze (re)parametrizirati jedinicnom brzinom(duljinom luka).
Dokaz. Neka je c : I → Rn, c = c(t), te neka je s = s(t) funkcija duljine luka od c,s(t) =
∫ ta ||c(u)||du. Vrijedi
ds(t)
dt= ||c(t)|| > 0,
pa je s = s(t) strogo rastuca funkcija. Nadalje, s = s(t) je glatka, primjerice, drugaderivacija jednaka je
d2s(t)
dt2=
c(t) · c(t)||c(t)||
.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 9
Inverzna funkcija t = t(s) strogo rastuce funkcije s postoji i glatka je. Zaista, primjerice,njezina prva derivacija jednaka je
dt
ds=
1dsdt
=1
||c(t)||> 0.
Definirajmo sadac(s) = c(t(s)).
Dakle, krivulju c smo reparametrizirali funkcijom t = t(s) ili, drugacije zapisano, funkcijomφ(s) = t. Sada je
|| ˙c(s)|| = ||c(t(s))t′(s)|| = ||c(t)|| 1
||c(t)||= 1
te je c jedinicne brzine.
Napomena. Uobicajeno je derivaciju krivulje c po parametru duljine luka s oznacavatisa c′, a derivaciju po opcem parametru t sa c.
Primjer 1. Reparametrizirajte pravac c(t) = pt+ q, t ∈ R, duljinom luka.
Primjer 2. Reparametrizirajte kruznicu c(t) = (p+r cos t, q+r sin t), t ∈ [0, 2π⟩, duljinomluka.
s(t) =
∫ t
0r dt = rt, t(s) =
s
r
c(s) = c(t(s)) = (p+ r coss
r, q + r sin
s
r), s ∈ [0, 2rπ⟩.
Primjer 3. Reparametrizirajte obicnu cilindricnu spiralu c(t) = (a cos t, a sin t, bt), t ∈ R,duljinom luka.
Primjer 4. Reparametrizirajte elipsu c(t) = (a cos t, b sin t), a, b > 0, t ∈ [0, 2π⟩, duljinomluka.
s(t) = b
∫ t
0
√1− b2 − a2
b2sin2 u du = bE(t,
b2 − a2
b2),
gdje je E(t,m) =∫ t0
√1−m2 sin2 u du elipticki integral druge vrste.
Primjer 5. Reparametrizirajte parabolu c(t) = (t, t2/2), t ∈ R, duljinom luka.
s(t) =1
2(t√1 + t2 + ln(t+
√1 + t2))

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 10
1.2 Vektor smjesten u tocku
U diferencijalnoj geometriji tangencijalni vektor c(t) krivulje c tretiramo kao vektor smjestenu tocki c(t) krivulje. Stoga uvodimo pojam vektora u tocki.
Definicija 1.2.1 Vektor u tocki p ∈ Rn (ili tangencijalni vektor od Rn u tocki p) jeureden par (p, v), v ∈ Rn. Pisemo i
(p, v) = vp.
Vektor v nazivamo vektorskim dijelom od vp. Skup svih vektora u tocki p ∈ Rn oznacavamosa Rn
p ili TpRn.
Vrlo cesto kad govorimo o vektoru u tocki, govorimo samo o njegovom vektorskom dijelu.
Skup svih vektora u tocki Rnp (TpR
n) organiziramo u unitarni prostor na prirodan nacin:definiramo zbrajanje vektora u tocki p
vp + wp = (v + w)p,
mnozenje vektora u tocki p skalarom
λvp = (λv)p,
te skalarno mnozenje vektora u tocki p
vp · wp = v · w.
Unitarni prostor Rnp (TpR
n) nazivamo prostorom vektora smjestenih u tocku p ili tangen-cijalni prostorom od Rn u tocki p.
Vektore u tocki u R3p mozemo i vektorski mnoziti
vp × wp = (v × w)p.
Definicija 1.2.2 Vektorsko polje X na otvorenom skupu U ⊂ Rn je preslikavanje kojesvakoj tocki p ∈ U pridruzuje vektor u toj tocki
X(p) = (p, x) = xp.
Vektorsko polje duz krivulje c : I → Rn je preslikavanje koje svakom t ∈ I pridruzujevektor y(t) u tocki c(t).
Primjer 1. Tangencijalno polje krivulje.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 11
Zadaci
1. Pokazite da je s
c(t) = (1− t2
1 + t2,
2t
1 + t2).
dana parametrizacija jedinicne kruznice (tzv. racionalna parametrizacija). Takoderpokazite da se t moze geometrijski interpretirati kao koeficijent smjera pravca kojiprolazi tockama (−1, 0) i (0, t), te presjeca kruznicu x2 + y2 = 1 u navedenoj tocki.
2. Odredite neku glatku parametrizaciju sljedecih krivulja:
a) jednakostrane hiperbole x2 − y2 = 1,
b) elipse.
3. Je li c(t) = p+ t3q, p, q ∈ Rn, regularna reparametrizacija (standardno parametrizi-ranog) pravca c(t) = p+ tq?
4. Krivulja c(t) = (t2, t3), t ∈ R se naziva Neil-ova ili polukubna parabola. Utvrditeda nije regularna u ishodistu.
Slika 1.5: Neilova parabola
5. Odredite implicitnu jednadzbu/e sljedecih krivulja u ravnini:
a) c(t) = (sin(t2), cos(t2))
b) c(t) = (sin2 t, cos2 t)
c) c(t) = (t2, sin t).
6. Dokazite da krivulja
c(t) = (t
1 + t2 + t4,
t2
1 + t2 + t4,
t3
1 + t2 + t4)
lezi na sferi sa sredistem u tocki S(0, 12 , 0). Koliki je polumjer te sfere?
7. Odredite parametarske jednadzbe krivulje zadane implicitno jednadzbama
x = 2a(1− e−za ), y =
√2ax− x2,
gdje je a > 0 konstanta.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 12
8. Dokazite da krivulja c(t) = (at cos t, at sin t, a2t2
2p ), t ∈ R, a = const. > 0, lezi na plohi
x2 + y2 = 2pz, te da je projekcija te krivulje na xy-ravninu Arhimedova spirala.
9. Krivulja u R2 zadana je parametarskim jednadzbama
x(t) =2t− 1
t+ 2, y(t) =
t
t+ 2, t ∈ R \ {−2}.
(i) Odreditedy
dx.
(ii) Napisite implicitnu jednadzbu dane krivulje. Koja je to krivulja?
10. Krivulja je zadana jedadzbom x2y3 + 4x+ 2y = 12.
(i) Odreditedy
dx.
(ii) Pokazite da je tangenta na krivulju u tocki (0,6) takoder tangenta i u tocki(3,0).
11. Parametarske jednadzbe krivulje su
x(t) =3t
t2 − 2, y(t) =
6
t2 − 2, t ∈ R \ {−
√2,√2}.
a) Odreditedy
dx.
b) Odredite jednadzbu normale na danu krivulju u tocki s parametrom t = 2.
12. U kojim je tockama tangenta krivulje c(t) = (3t− t3, 3t2, 3t+ t3), t ∈ R, paralelna sravninom 3x+ y + z + 2 = 0?
13. Dokazite da krivulja c : R → R3 zadana s c(t) = (et√2 cos t, e
t√2 sin t, e
t√2 ) lezi na
konusu x2 + y2 = z2 i da sijece njegove izvodnice pod kutem π4 .
14. Krivulja je zadana jednadzbom
(i) x4 − 2x2 + y4 − 2y2 + 1 = 0,
(ii) x4 − 2x2 + y4 − 2y2 = 0.
Odredite neku njezinu (lokalnu) parametrizaciju (vidi Sliku 1.6).
-2 -1 0 1 2
-2
-1
0
1
2
-2 -1 0 1 2
-2
-1
0
1
2
Slika 1.6: Krivulje (x2+y2−1−√2xy)(x2+y2−1+
√2xy) = 0, (x2−1)2+(y2−1)2 = 2

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 13
15. Vivijanijeva krivulja je presjek sfere x2+y2+z2 = 4r2 i kruznog cilindra (x−r)2+y2 =r2. Odredite njezinu parameterizaciju.Uputa. Za kruzni cilindar koristite parametrizaciju x = r+r cosu, y = r sinu, z = v,te je uvrstite u jednadzbu sfere. Izrazite v2.
16. Vivijanijeva krivulja je presjek sfere x2+y2+z2 = 4r2 i kruznog stosca (x−2r)2+y2 =z2. Odredite njezinu parameterizaciju.
17. Je li krivulja c : [0, 2π⟩ → R3 c(t) = (cos t, cos2 t, sin t) regularna? Odredite jed-
Slika 1.7: Krivulja c(t) = (cos t, cos2 t, sin t)
nadzbu tangente te krivulje u tocki t = π4 (vidi Sliku 1.7).
18. Ispitajte regularnost krivulja
a) c(t) = (sin2 t, cos2 t), t ∈ ⟨π4 ,3π4 ⟩;
b) c(t) = (t, ch t), t ∈ R.
19. Odredite duljinu luka sljedecih krivulja
a) astroide c(t) = (a cos3 t, a sin3 t), t ∈ [0, 2π⟩;b) jednog luka cikloide c(t) = (a(t− sin t), a(1− cos t)), t ∈ [0, 2π⟩;
20. Izracunajte duljinu luka krivulje zadane implicitno s
x2 = 3y, 2xy = 9z
od (0, 0, 0) do (3, 3, 2).
21. Krivulju c : R → R3 zadanu s c(t) = (ch t, sh t, t) reparametrizirajte tako da budeparametrizirana duljinom luka.
22. Reparametrizirajte krivulju c : R → R3, c(t) = (et cos t, et sin t, et) duljinom luka.
23. Dva broda gibaju se pravocrtno, konstantnim brzinama. Prvi krece iz polozaja(−20,−20), a drugi iz (2, 0), Koordinate polozaja izrazene su u km. Brzina prvogbroda je 40 km/h, a drugog 50 km/h. Vektor smjera prvog broda je (3, 4), a drugog(−4,−3).
(a) Hoce li se brodovi sresti?
(b) Kolika je njihova najmanja udaljenost?

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 14
1.3 Zakrivljenost
Za uvodenje pojma zakrivljenosti krivulje, motivaciju nam daju sljedeci intuitivni primjeri:
1. Pravac je krivulja zakrivljenosti 0.
2. Kruznica manjeg radijusa ima vecu zakrivljenost od kruznice veceg radijusa.
Propozicija 1.3.1 Ako je tangencijalni vektor krivulje c : I → Rn konstantan vektor= 0, tada je c(I) pravac (dio pravca).
Dokaz. Neka je c(t) = a = const. = 0, t ∈ I. Tada je
c(t) =
∫c(u)du = at+ b,
gdje je b ∈ Rn konstantan vektor. Krivulja c je pravac s vektorom smjera a kroz tocku b.Uocimo da ako je a = 0, tada krivulja c degenerira u tocku.
Prethodna propozicija ilustrira da je zakrivljenost krivulje geometrijski smisleno definiratikao realnu funkciju koja opisuje promjenu jedinicnog tangencijalnog vektora krivulje. Akou prethodnom primjeru za pravac odredimo (jedinicni) tangencijalni vektor c = a
||a|| , tadaje vektor c jednak nul-vektoru, te je takoder i
||c|| = 0.
Dakle, funkcija ||c|| je dobar kandidat za funkciju zakrivljenosti. No, zelimo osigurati ineovisnost zakrivljenosti krivulje o parametrizaciji. Da bismo izbjegli komplicirane vezepri reparametrizacijama, u definiciji se najprije ogranicavamo na krivulje parametriziraneduljinom luka. Zatim cemo zakrivljenost krivulje parametrizirane opcim parametrom de-finirati tako da vrijedi
κ(t) = κ(s)
u tocki c(t) = c(s) krivulje c i njezine reparametrizacije duljinom luka c.
Postavljamo jos jedan zahtjev na funkciju zakrivljenosti krivulje – to je da ona ne smijeovisiti o polozaju krivulje u prostoru, tj. da krivulja i njezina izometricna slika morajuimati jednake zakrivljenosti.
Definicija 1.3.2 Neka je c : I → R3 krivulja parametrizirana duljinom luka s. Funkciju
κ : I → R
κ(s) = ||c′′(s)||
nazivamo zakrivljenoscu (fleksijom) krivulje c u tocki c(s).
Propozicija 1.3.3 Regularna krivulja je pravac (dio pravca) ako i samo ako je κ = 0.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 15
Primjer 1. Zakrivljenost kruznice c(s) = (r coss
r, r sin
s
r, 0) radijusa r > 0 jednaka je
1
r.
Primjer 2. Zakrivljenost obicne cilindricne spirale c(s) = (a coss
D, a sin
s
D,bs
D), gdje je
D =√a2 + b2, jednaka je κ =
a
D2.
Pokazimo sad da je definicija zakrivljenosti dobra, tj. da ne ovisi o izboru parametra duljineluka. U tu svrhu, proucimo kako izgleda neki drugi parametar duljine luka krivulje.
Propozicija 1.3.4 Neka je c krivulja parametrizirana duljinom luka s i neka je c njenareparametrizacija duljinom luka u. Tada je
u = ±s+ c, c ∈ R. (1.3.2)
Obratno, ako je s parametar duljine luka od c, tada je s (1.3.2) takoder definiran parametarduljine luka.
Dokaz. Imamo c(u) = c(s). Tada je
dc
ds=
dc
du
du
ds. (1.3.3)
Uzimanjem norme obiju strana i koristenjem || dcds || = || dcdu || = 1, dobivamo
|duds
| = 1.
Sada pokazimo da definicija zakrivljenosti ne ovisi o izboru parametra duljine luka. Zaista,iz (1.3.3) slijedi
d2c
ds2=
d2c
du2(du
ds)2 +
dc
du
d2u
ds2=
d2c
du2
odakle slijedi κ(s) = κ(u).
Krivulju nije moguce uvijek eksplicitno reparametrizirati duljinom luka. Stoga je vaznoimati formulu za zakrivljenost krivulja parametriziranih opcim parametrom:
Propozicija 1.3.5 Neka je c regularna krivulja u R3 parametrizirana opcim parametromt. Tada je njena zakrivljenost
κ(t) =||c(t)× c(t)||
||c(t)||3.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 16
Dokaz. Zakrivljenost krivulje c parametrizirane opcim parametrom t definira se kaozakrivljenost njezine reparametrizacije c duljinom luka, c(t) = c(s)
κ(t) = κ(s).
Za derivacije vrijedi
c′ = cdt
ds
c′′ = c (dt
ds)2 + c
d2t
ds2.
Takoder
ds
dt= ||c||, dt
ds=
1
||c||d2t
ds2= − c · c
||c||4.
Sada je
c′′ = c1
||c||2+ c(− c · c
||c||4)
=1
||c||4(c(c · c)− c(c · c)) .
Koristeci formulu a × (b × c) = (a · c)b − (a · b)c, uz a = c = c, b = c i cinjenicu da suvektori c i c× c okomiti, pa je ||c× (c× c)|| = ||c|| ||c× c|| dobivamo
κ(t) = κ(s) = ||c′′(s)|| = 1
||c(t)||4||c(t)×
(c(t)× c(t)
)|| = ||c(t)× c(t)||
||c(t)||3
sto smo i tvrdili.
Primjer 3. Izracunajte zakrivljenost kruznice c(t) = (r cos t, r sin t, 0) radijusa r.
Zakrivljenost krivulje c parametrizirane duljinom luka definirali smo kao brzinu promjenevektora c′(s) dakle, kao brzinu promjene jedinicnog tangencijalnog polja T (s). Cilj nam jedefinirati i jos neka polja vezana uz krivulju – tzv. ortonormirani trobrid (reper), tj. desnuortonormiranu bazu vektorskog prostora R3
c(s) u svakoj tocki krivulje.
Neka je c : I → R3 krivulja parametrizirana duljinom luka. Polje T (s) = c′(s) je jedinicnotangencijalno polje od c.
Polje vektora glavnih normala definiramo kao
N(s) =c′′(s)
||c′′(s)||, c′′(s) = 0,

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 17
a polje binormalaB(s) = T (s)×N(s).
Tada je(T (s), N(s), B(s)
)desna ortonormirana baza od R3
c(s). Nazivamo je Frenet-ovim
(Frenet-Serret-ovim) trobridom (reperom, okvirom) krivulje c.
Pokazimo primjerice da su polja T i N okomita. Kako je c parametrizirana duljinom luka,to je
c′(s) · c′(s) = (c′(s))2 = 1,
odakle deriviranjem slijedi 2c′(s) · c′′(s) = 0, iz cega tvrdnja slijedi. Pokazimo jos da jepolje B jedinicno. Kako je B definirano kao vektorski produkt okomitih polja T i N , to je
||B(s)|| = ||T (s)×N(s)|| = ||T (s)|| ||N(s)|| sin∠(T (s), N(s)
)= 1.
Primijetimo da je polje N definirano samo za c′′(s) = 0, te u daljnjem promatramo samotakve krivulje. Nazivamo ih dopustivim (usporedi s Definicijom 1.3.9). Uocimo da jec′′(s) = 0 ako i samo ako je κ(s) = 0.
Definirajmo sada za krivulje parametrizirane duljinom luka i sljedecu funkciju:
Definicija 1.3.6 Funkcija τ : I → R,
τ(s) = −N(s) ·B′(s)
naziva se torzijom (sukanjem) krivulje c parametrizirane duljinom luka u tocki c(s).
Teorem 1.3.7 (Frenet-ove formule) Neka je c dopustiva krivulja parametrizirana du-ljinom luka s. Tada vrijedi
T ′ = κN
N ′ = −κT + τB
B′ = −τN.
Dokaz. Opcenito mozemo pisati T ′ = a1T +a2N +a3B, gdje su a1, a2, a3 : I → R glatkefunkcije. Kako je T ′ = c′′ = κN , to zbog jedinstvenosti rastava slijedi a1 = a3 = 0, a2 = κ.
Neka je sadaN ′ = b1T + b2N + b3B. (1.3.4)
Kako je N jedinicno polje, to je N2 = 1, odakle deriviranjem slijedi
N ·N ′ = 0.
Pomnozimo li relaciju (1.3.4) skalarno s N , dobivamo N ′ ·N = b2. Sada slijedi b2 = 0.
Nadalje, primijetimo da T ·N = 0 povlaci T ′ ·N + T ·N ′ = 0, odakle slijedi a2 + b1 = 0.Prema tome je b1 = −κ.
Odredimo funkciju b3. Uocimo kao i prije N · B = 0, pa je b3 + c2 = 0, gdje je B′ =c1T + c2N + c3B. Kako je τ = −N ·B′, to je −c2 = b3 = τ .

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 18
Propozicija 1.3.8 Neka je c dopustiva krivulja parametrizirana opcim parametrom t.Tada vrijedi
τ =(c× c)· ...c||c× c||2
=det(c, c,
...c)
||c× c||2.
Dokaz. Neka je c reparametrizacija od c duljinom luka, c(s) = c(t). Pokazimo najprijeda navedena formula vrijedi za torziju krivulje parametrizirane duljinom luka. Neka je(T (s), N(s), B(s)) Frenetov trobrid od c. Tada je torzija τ od c jednaka
τ = −N · B′ = −N · (T × N)′ = −N · (T ′ × N + T × N ′) = −N · (T × N ′).
Iz definicije je
N =1
κT ′ =
1
κc′′,
dobivamo
τ = −1
κc′′ · (c′ × d
ds(1
κc′′))
= −1
κc′′ · (c′ × (
1
κc′′′ − κ′
κ2c′′))
= − 1
κ2c′′ · (c′ × c′′′) +
κ′
κ3c′′ · (c′ × c′′)
=1
κ2(c′ × c′′) · c′′′.
Jos trebamo utvrditi da je za krivulje parametrizirane duljinom luka zakrivljenost dana isljedecom formulom
κ2(s) = ||c′(s)× c′′(s)||2.
Zaista,||c′(s)× c′′(s)||2 = ||c′(s)||2||c′′(s)||2 sin2∠
(c′(s), c′′(s)
)= ||c′′(s)||2,
te je formula opravdana za krivulje parametrizirane duljinom luka.
Nadalje, kako smo vec i prije djelomicno utvrdili, za parametrizacije c = c(s) i c = c(t)vrijedi
c′ = cdt
ds
c′′ = c (dt
ds)2 + c
d2t
ds2
c′′′ =...c (
dt
ds)3 + 3c
dt
ds
d2t
ds2+ c
d3t
ds3.
Torziju od c definiramo kao torziju od njene reparametrizacije c duljinom luka u odgova-rajucoj tocki
τ(t) = τ(s).
Vrijedi
c′ × c′′ = (dt
ds)3 c× c,

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 19
(c′ × c′′) · c′′′ = (dt
ds)6 (c× c)· ...c .
Prema tome je(c′ × c′′) · c′′′
||c′ × c′′||2=
(c× c)· ...c||c× c||2
Izvedimo izraze za polja Frenetovog trobrida za krivulje parametrizirane opcim parame-trom. Bavit cemo se samo s krivuljama za koje u svakoj tocki mozemo konstruirati prateciFrenetov trobrid
(T (t), N(t), B(t)
). Ponovimo, takve krivulje nazivamo dopustivim. Pre-
ciznije:
Definicija 1.3.9 Krivulju c : I → R3 (parametriziranu opcim parametrom) nazivamodopustivom ako su polja duz krivulje {c, c} linearno nezavisna.
Uocimo da smo krivulje parametrizirane duljinom luka nazivali dopustivim ako polje cnije nul-polje, tj. ako i samo ako je κ(s) = 0, s ∈ I. Taj je zahtjev ekvivalentan gornjemzahtjevu za krivulje parametrizirane opcim parametrom. Zaista, polja {c, c} su linearnonezavisna ako i samo ako je njihov vektorski produkt razlicit od nul-vektora, odnosnonjegova norma razlicita od 0. Ako je c parametrizirana duljinom luka, tada je
0 = ||c× c||2 = ||c||2||c||2 − (c · c)2 = ||c||2
odakle slijedi tvrdnja.
Uocimo takoder da je dopustiva krivulja regularna.
Propozicija 1.3.10 Neka je c : I → R3 dopustiva krivulja. Tada vrijedi
T (t) =c(t)
||c(t)||N(t) = B(t)× T (t)
B(t) =c(t)× c(t)
||c(t)× c(t)||.
Dokaz. Opet cemo polja T (t), N(t), B(t) definirati pomocu odgovarajucih polja T (s),N(s), B(s) reparametrizacije c krivulje c duljinom luka. Koristeci Frenetove formule,mozemo pisati
c(t) = c′(s)s = T (s)||c(t)|| = T (t)||c(t)||
c(t) = κ(s)N(s)s2 + T (s)s = κ(t)N(t)s2 + T (t)s.
Iz prve jednakosti odmah slijedi
T (t) =c(t)
||c(t)||.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 20
Nadalje, imamoc(t)× c(t) = κ(t)s3T (t)×N(t) = κ(t)s3B(t).
Kako je B(t) jedinicno polje, a pozitivan faktor κ(t)s3 osigurava jednaku orijentacijuvektora lijeve i desne strane prethodne jednakosti, to mora biti
B(t) =c(t)× c(t)
||c(t)× c(t)||.
Formula za N(t) slijedi iz pozitivne orijentiranosti baze (T,N,B).
Propozicija 1.3.11 (Frenetove formule za krivulje parametrizirane opcim par.)Neka je c : I → R3 dopustiva krivulja parametrizirana opcim parametrom. Tada vrijedi
T (t) = ||c||κ(t)N(t)
N(t) = ||c|| (−κ(t)T (t) + τ(t)B(t))
B(t) = −||c|| τ(t)N(t).
Napomena. Sjetimo se da zakrivljenost (fleksija) mjeri brzinu promjene jedinicnog tan-gencijalnog polja krivulje. Slicno, apsolutna vrijednost torzije mjeri brzinu promjene poljabinormala. Zaista, iz Frenetovovih formula slijedi
||B′|| = ||τN || = |τ | ||N || = |τ |.
Postavlja se pitanje sto je brzina promjene polja glavnih normala:
||N ′|| = || − κT + τB|| =√κ2 + τ2.
Dakle, brzina promjene polja glavnih normala ne odreduje neku ”novu zakrivljenost”.
Zadaci
1. Krivulje u R2. Neka je c : I → R2 krivulja u R2 parametrizirana duljinomluka, T (s) = c′(s) = (x′(s), y′(s)) njezino jedinicno tangencijalno polje. Normalnopolje N(s) definiramo tako da (T (s), N(s)) cine desnu ortonormiranu bazu za R2
c(s).
Pokazite da je N(s) = (−y′(s), x′(s)). Nadalje, pokazite da vrijede Frenetove formule
T ′ = κsN, N ′ = −κsT,
gdje je κs : I → R zakrivljenost od c, κs = det(c′, c′′).
Zakrivljenost κs nazivamo orijentirana zakrivljenost ili zakrivljenost s predznakom(eng. signed curvature). Pokazite da vrijedi
κ = |κs|,

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 21
gdje je κ = ||c′′||.Ako s φ(s) oznacimo kut za koji treba rotirati u pozitivnom smjeru proizvoljan fiksnijedinicni vektor (primjerice, jedinicni vektor pozitivne x-osi) tako da se on poklopis T (s), mozemo pisati T (s) = (cosφ(s), sinφ(s)). Tada je
T ′(s) = φ′(s)(− sinφ(s), cosφ(s)).
Pokazite da vrijedi
κs =dφ
ds.
Uocite da je zakrivljenost krivulje je pozitivna (negativna), ako se T zakrece u pozi-tivnom (negativnom) smjeru pri rastu parametra krivulje. U tockama infleksijezakrivljenost je 0 (mijenja se predznak zakrivljenosti).
Κs < 0 Κs > 0Κs < 0
TN
c¢¢
Slika 1.8: Predznak zakrivljenosti krivulje u R2 parametrizirane duljinom luka
2. Tjeme krivulje definiramo kao stacionarnu tocku fleksije. Odredite tjemena elipsec : [0, 2π⟩ → R2, c(t) = (a cos t, b sin t), a, b > 0.
3. Odredite tjemena hiperbole c : R → R2, c(t) = (a ch t, b sh t), a, b > 0. Kolikorjesenja dobivate? Zasto?
Odredite neku drugu parametrizaciju hiperbole i nadite tjemena za tu parametriza-ciju.
4. Odredite tjemena krivulje y = lnx.
5. Ako je krivulja c : I → R2 parametrizirana duljinom luka, izrazite zakrivljenostkrivulje c(t) = c(t) + T (t) preko zakrivljenosti od c.
6. Ako je krivulja c : I → R2 parametrizirana duljinom luka, izrazite zakrivljenostkrivulje c∗(t) = c(t) + N(t)
κ(t) preko zakrivljenosti od c.
7. Na lancanici y = a ch xa dane su tocke T1 i T2 u kojima su normale na lancanicu
medusobno okomite. Ako su R1 i R2 polumjeri zakrivljenosti lancanice u tockamaT1 i T2, dokazite da vrijedi
1
R1+
1
R2=
1
a.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 22
8. Na krivulji c : ⟨0, π⟩ → R2 zadanoj s
c(t) = (−a ln tgt
2− a cos t, a sin t),
gdje je a > 0, dana je tocka T . Tangenta na krivulju u tocki T sijece x-os u tocki N .Dokazite da srediste zakrivljenosti krivulje u tocki T ima istu apscisu kao tocka N .
9. Pokazite da je krivulja c(t) u Rn pravac (dio pravca) ako i samo ako su polja c i clinearno zavisna. Je li pravac dopustiva krivulja?
10. Neka je krivulja c : R → R3 zadana s c(t) = (t2, t, t4). Odredite Frenetov trobriddane krivulje u tocki (1, 1, 1).
11. Odredite Frenetov trobrid, fleksiju i torziju krivulje u R3
(i) c(t) = (et cos t, et sin t, et)
(ii) c(t) = (ln t, 2t, t2),
(iii) c(t) = (t2, 1− t2, t2 − t).
12. Izracunajte fleksiju i torziju zavojnice c : R → R3, c(t) = (a cos t, a sin t, bt), gdje sua i b konstante, a > 0.
1.4 Fundamentalni teorem za krivulje
U ovom poglavlju proucit cemo specijalne klase krivulja i njihovu diferencijalno-geomet-rijsku karakterizaciju preko fleksije i torzije. Dokazat cemo i fundamentalni teorem zakrivulje u prostoru tj. teorem klasifikacije kojim se pokazuje da je krivulja u prostorujednoznacno (do na polozaj u prostoru) opisana svojom fleksijom i torzijom.
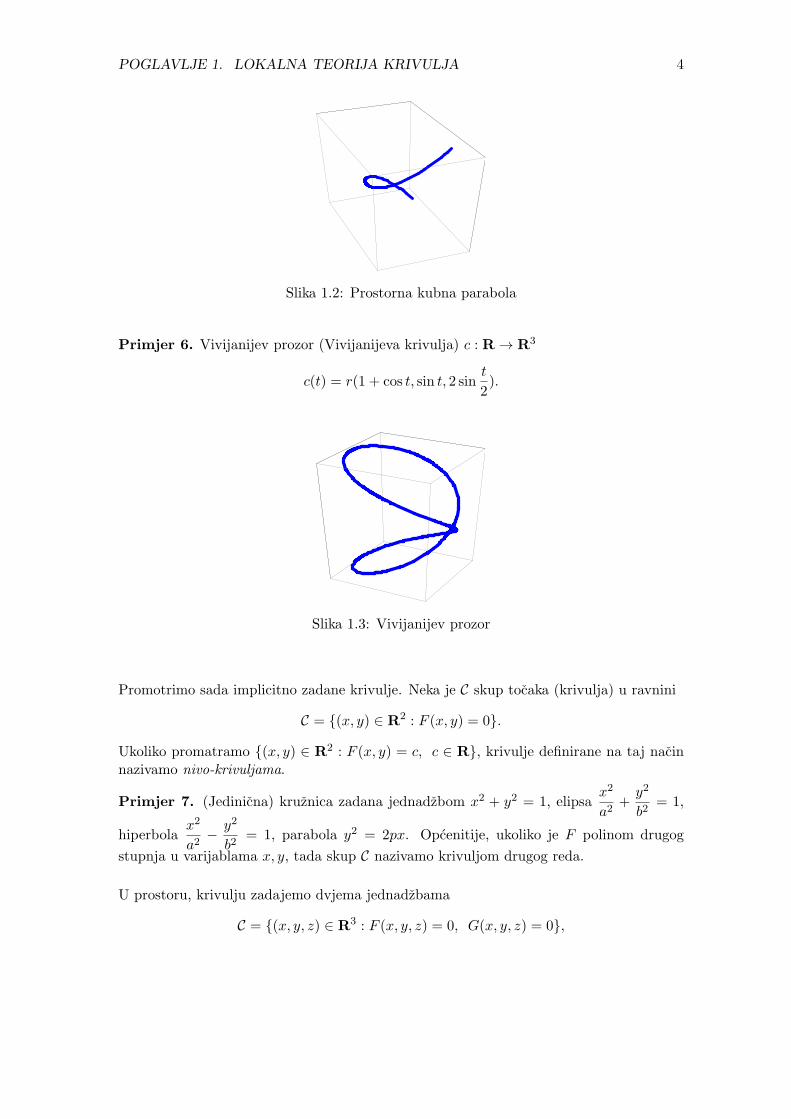
Definicija 1.4.1 Za krivulju c : I → R3 kazemo da je ravninska ako postoji ravninaπ ⊂ R3 takva da je c(I) ⊂ π.
Primjer 1. Ispitajte je li krivulja c : [0, 2π⟩ → R3
c(t) = (cos t−√2 sin t+ 3, cos t+
√2 sin t+ 4,
√2 cos t+ 5)
ravninska (vidi sliku 1.9).
Propozicija 1.4.2 Neka je c : I → R3 dopustiva krivulja. Krivulja c je ravninska ako isamo ako je τ = 0.
Dokaz. Uocimo da bez smanjenja opcenitosti mozemo pretpostaviti da je c parametrizi-rana duljinom luka.
POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 23
Ako je c ravninska, to znaci da postoje konstantni vektori p, q ∈ R3 tako da c(s), s ∈ I,zadovoljava jednadzbu ravnine
(c(s)− p) · q = 0, s ∈ I.
Deriviranjem slijedic′(s) · q = 0, c′′(s) · q = 0.
Dakle, vektor q je okomit i na c′(s) i na c′′(s), pa je vektor binormale od c u tocki c(s)jednak
B(s) = ± q
||q||.
Uocimo da je vektor B(s) konstantan vektor (ne ovisi o s). Stoga je B′(s) = 0. IzFrenetovih formula sada slijedi −τ(s)N(s) = 0. Kako je vektor N(s) jedinicni, to jeτ(s) = 0.
Obratno, neka je τ(s) = 0. Tada je vektor B(s) konstantan. Pokazimo da c(I) lezi uravnini okomitoj na konstantan vektor B(s) := B. U tu svrhu, promotrimo funkciju
f(s) = (c(s)− c(s0)) ·B, s ∈ I.
Deriviranjem dobivamof ′(s) = T (s) ·B = 0, s ∈ I.
Prema tome, funkcija f je konstantna na I. Kako je f neprekidna i kako je f(s0) = 0, toje f ≡ 0 na I. Stoga je
(c(s)− c(s0)) ·B = 0, s ∈ I
pa c(I) lezi u navedenoj ravnini.
Definicija 1.4.3 Ravnina koja prolazi tockom c(s0) krivulje, a vektor B(s0) joj je vektornormale, naziva se oskulacijska ravnina1 krivulje c u tocki c(s0).
Uocimo da je oskulacijska ravnina razapeta vektorima T (s), N(s). Ravninska krivulja leziu oskulacijskoj ravnini bilo koje svoje tocke.
2
3
4
3 4 5
4
5
6
2
3
4
3
4
5
4
5
6
Slika 1.9: Kruznica u prostoru
1osculare (lat.) = ljubiti

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 24
Propozicija 1.4.4 Neka je c : I → R3 dopustiva krivulja. Tada je c(I) kruznica (dio
kruznice) radijusa r > 0 ako i samo ako je κ = konst. =1
r> 0, τ = 0.
Dokaz. Bez smanjenja opcenitosti mozemo pretpostaviti da je c parametrizirana dulji-nom luka. Zakrivljenost kruznice radijusa r koja lezi u nekoj koordinatnoj ravnini smo
vec izracunali, κ =1
r. Neku drugu proizvoljnu kruznicu mozemo dobiti iz kruznice u ko-
ordinatnoj ravnini izometrijom prostora. Svaka se pozitivna izometrija prostora2 f mozeprikazati kao kompozicija ortogonalnog operatora kojeg slijedi translacija (za vektor a),f = t ◦ r. Stavimo li dakle c(t) = f(c(t)), to je
c(t) = r(c(t)) + a,
˙c(t) = r(c(t)), ¨c(t) = r(c(t)).
Kako r cuva skalarni produkt (pa i normu), slijedi
κ(t) = ||¨c(t)|| = ||r(c(t))|| = ||c(t)|| = κ(t)
te je zakrivljenost i proizvoljne kruznice jednaka1
r.
Pokazimo obratno, da je krivulja c sa danom fleksijom κ = konst. =1
r> 0 i torzijom
τ = 0 kruznica.
Iz τ = 0 slijedi da je krivulja c ravninska. Promotrimo sada vektorsku funkciju
p(s) = c(s) +1
κN(s),
gdje je N(s) polje glavnih normala od c. Deriviranjem i primjenom Frenetovih formulaslijedi
p′(s) = c′(s) +1
κN ′(s) = T (s)− 1
κ· κ T (s) = 0.
Prema tome, vektor p := p(s) ne ovisi o s, odnosno on je konstantan vektor. Sada slijedi
||c(s)− p|| = ||1κN(s)|| = 1
κ= konst.
Iz svega dokazanog zakljucujemo da c(I) lezi na sferi radijusa r :=1
κi u (svojoj osku-
lacijskoj) ravnini. Presjek sfere i ravnine je sigurno kruznica, dokazimo jos da je c(I)
kruznica (ili njen dio) najveceg radijusa, tj. radijusa r =1
κ. U tu svrhu treba pokazati da
(oskulacijska) ravnina(x− c(s0)) ·B = 0,
2Preslikavanje oblika f : R3 → R3, f = t ◦ r gdje je t translacija, a r rotacija (ortogonalni opratordeterminante 1) naziva se pozitivna izometrija ili euklidsko gibanje. Izometrija prostora moze jos bitinegativna, det(r) = −1.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 25
gdje je x = (x, y, z) radij-vektor po volji odabrane tocke ravnine, prolazi sredistem p sfere
||x− p||2 = r2,
x = (x, y, z) radij-vektor po volji odabrane tocke sfere.
Zaista, srediste sfere zadovoljava jednadzbu oskulacijske ravnine
(p− c(s0)) ·B = (c(s) +1
κN(s)− c(s0)) ·B = (c(s)− c(s0)) ·B +
1
κN(s) ·B = 0 + 0 = 0,
te je tvrdnja dokazana.
Definicija 1.4.5 Za krivulju c : I → R3 kazemo da je opca cilindricna spirala ako duz cpostoji jedinicno i konstantno vektorsko polje E koje s krivuljom c zatvara konstantni kut,odnosno
T (s) · E = cosφ = konst.,
gdje je T (s) jedinicno tangencijalno polje od c.
Pogledajmo sto to znaci geometrijski. Vektorsko polje E duz c odreduju familiju paralelnihpravaca. Pravci odreduju tzv. cilindricnu plohu (oni cine izvodnice te plohe). Krivuljakoja je opca cilindricna spirala sijece izvodnice te plohe pod konstantnim kutom. Kazemoda je opca cilindricna spirala izogonalna trajektorija3 izvodnica cilindricne plohe. Posebno,ako sijece izvodnice pod pravim kutom, govorimo o ortogonalnoj trajektoriji.
Slika 1.10: Opca cilindricna spirala
Propozicija 1.4.6 Dopustiva krivulja c : I → R3 je opca cilindricna spirala ako i samoako je
τ
κ= konst.
Dokaz. Bez smanjenja opcenitosti mozemo pretpostaviti da je c parametrizirana duljinomluka. Uocimo najprije da je φ = kπ, k ∈ Z (stoga je i sinφ = 0). Inace bi, naime, bilo
T (s) = ±E(s) = konst,
3isos = isti, gonia = kut

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 26
te bi biloT ′(s) = 0 ⇒ κ(s) = 0,
sto je kontradikcija s dopustivoscu od c.
Neka je c opca cilindricna spirala tj. neka duz c postoji jedinicno i konstantno vektorskopolje E takvo da je
T (s) · E = cosφ.
Deriviranjem dobivamoT ′(s) · E = 0,
odakle zbog κ(s) = 0 slijediN(s) · E = 0.
Dakle, za svaki s ∈ I postoji rastav E = a(s)T (s) + b(s)B(s), gdje su a, b : I → R glatkefunkcije. Za njih vrijedi
a(s) = E · T (s) = cosφ, b(s) = E ·B(s).
Nadalje, kako je ||E|| = 1, to je a2(s)+b2(s) = 1, sto povlaci b2(s) = sin2 φ. Bez smanjenjaopcenitosti mozemo uzeti b(s) = sinφ. Dobili smo
E = cosφT (s) + sinφB(s).
Sada je0 = E′ = (cosφκ(s)− sinφτ(s))N(s).
Kako N(s) nije nul-vektor, to je cosφκ(s)− sinφτ(s) = 0 tj.
τ
κ=
cosφ
sinφ= konst.
sto je trebalo pokazati.
Obratno, neka jeτ
κ= konst. Definirajmo φ kao
τ
κ= ctgφ.
Nadalje, definirajmo E(s) = cosφT (s) + sinφB(s). Treba pokazati da je E trazeno poljeiz definicije opce cilindricne spirale, tj. da je E jedinicno i konstantno polje, te da c zatvaras njim konstantni kut.
Primjer 2. Obicna cilindricna spirala c(t) = (a cos t, a sin t, bt) je opca cilindricna spirala.Obicna cilindricna spirala c lezi na kruznom cilindru x2+y2 = a2. Pod kojim kutom sijecenjegove izvodnice?
Primjer 3. Krivulja koja je presjek ploha x2 = 3y, 2xy = 9z je opca cilindricna spirala.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 27
Slika 1.11: Obicna cilindricna spirala
Slika 1.12: Opca cilindricna spirala x2 = 3y, 2xy = 9z
Teorem 1.4.7 (Fundamentalni teorem za krivulje) Neka su κ, τ : I → R glatkefunkcije, κ(s) > 0, s ∈ I. Tada postoji krivulja c : I → R3 kojoj je s parametar du-ljine luka, a funkcije κ(s) i τ(s) fleksija i torzija.
Nadalje, ako je c : I → R3 neka druga krivulja s tim svojstvima, tada postoji pozitivnaizometrija prostora f : R3 → R3, f = t ◦ r, gdje je t translacija, t(x) = x+ a, r rotacija(tj. ortogonalni operator determinante 1) tako da je
c = f(c) = r(c) + a.
Kazemo da postoji jedinstvena, do na polozaj u prostoru, krivulja kojoj su κ(s) fleksija,a τ(s) torzija, s parametar duljine luka. Takve krivulje c i c nazivamo kongruentima.
Dokaz. U dokazu cemo vise puta koristiti sljedeci teorem o sustavu obicnih diferencijalnihjednadzbi (Picard-Lindelofov teorem):
Teorem 1.4.8 Uz dane pocetne uvjete s0 ∈ I, ((x1)0, . . . , (xn)0) ∈ Rn postoji otvoren

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 28
interval J ⊂ I i jedinstveno preslikavanje x : J → Rn klase Ck+1 tako da vrijedi
x(s0) = ((x1)0, . . . , (xn)0),x′1(s) = f1(s, x1, . . . , xn),
...x′n(s) = fn(s, x1, . . . , xn),
gdje su fi, i = 1, . . . , n, zadane funkcije klase Ck. Ako je sustav diferencijalnih jednadzbilinearan, tada je J = I.
Egzistencija. Koristenjem navedenog teorema, pokazat cemo prvo da uz zadane κ, τpostoje {T (s), N(s), B(s)} koji zadovoljavaju Frenetove formule, a zatim da oni cine or-tonormirani skup.
1. Neka su κ, τ : I → R poznate glatke funkcije, κ(s) > 0, s ∈ I. One se pojavljuju uFrenetovim formulama za polja {T,N,B}
T ′ = κN
N ′ = −κT + τB
B′ = −τN.
Stavimo li
T (s) = (x1(s), x2(s), x3(s)), N(s) = (x4(s), x5(s), x6(s)), B(s) = (x7(s), x8(s), x9(s)),
prethodni sustav mozemo pisati u obliku
(x1)′(s) = f1(s, x1, . . . , x9)
...(x9)
′(s) = fn(s, x1, . . . , x9),
Uocimo da je sustav je linearan, tj. derivacije nepoznatih funkcija su linearna kombinacijanepoznatih funkcija, pa sustav mozemo zapisati matricno X ′ = AX, gdje je
A =
0 κ 0−κ 0 τ0 −τ 0
, X =
TNB
.
Picard-Lindelofov teorem povlaci da za zadani desno orijentirani ortonormirani trobrid{T0, N0, B0} postoji jedinstvena familija trobrida {T (s), N(s), B(s)} koja zadovoljava
T (s0) = T0, N(s0) = N0, B(s0) = B0
i sustav dan s Frenetovim formulama.
2. Pokazimo da je ta familija takoder ortonormirana i desno orijentirana. U tu svrhu,ponovo koristimo Frenetove formule. Promotrimo sljedece funkcije
T ·N, T ·B, N ·B, T · T, N ·N, B ·B.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 29
Za njih vrijedi
d
ds(T ·N) = T ′ ·N + T ·N ′ = κN ·N − κT · T + τT ·B,
d
ds(T ·B) = κN ·B − τT ·N,
d
ds(N ·B) = −κT ·B + τB ·B − τN ·N,
d
ds(T · T ) = 2κT ·N,
d
ds(N ·N) = −2κN · T + 2τN ·B,
d
ds(B ·B) = −2τB ·N.
To je opet sustav linearnih diferencijalnih jednadzbi s pocetnim uvjetima
T0 ·N0 = T0 ·B0 = N0 ·B0 = 0, T0 · T0 = N0 ·N0 = B0 ·B0 = 1.
Ocito su funkcije T · N = T · B = N · B = 0, T · T = N · N = B · B = 1 rjesenjasustava, a jedinstvenost povlaci da su to upravo trazena rjesenja. Prema tome, trobrid{T (s), N(s), B(s)} je ortonormiran. Taj trobrid je desno orijentiran jer je determinantadet : M3(R) → R neprekidna funkcija (za desno orijentirani trobrid {T,N,B} vrijedi daje det(T,N,B) = 1 > 0).
3. Sada iz poznatog trobrida {T (s), N(s), B(s)} konstruiramo krivulju c
c(s) =
∫ s
s0
T (u)du, s0 ∈ I.
Ocito jec′(s) = T (s),
te je krivulja c parametrizirana duljinom luka, naime vrijedi ||c′(s)|| = 1.
4. Lakim racunom se pokazuje da su fleksija i torzija krivulje c upravo jednake zadanimfunkcijama κ, τ . Time je pokazana egzistencija krivulje.
Jedinstvenost. Pokazimo jos jedinstvenost do na izometriju prostora.
Neka je c neka druga krivulja kojoj su κ i τ fleksija i torzija. Pokazimo da je tadac = f(c), gdje je f pozitivna izometrija prostora. Pokazat cemo da c i f(c) zadovoljavajuiste Frenetove formule i iste pocetne uvjete, te cemo primijeniti Picard-Lindelofov teorem.
Konstruirajmo najprije izometriju f . Neka je {T0, N0, B0} Frenetov trobrid krivulje c(s)u tocki c(s0). Za dva pocetna desna ortonormirana trobrida
{T0, N0, B0}, {T0, N0, B0}
u tockama c(s0) i c(s0), postoji pozitivna izometrija prostora f koja preslikava c(s0) uc(s0), tako da pripadna rotacija preslikava {T0, N0, B0} u {T0, N0, B0}.

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 30
Tu pozitivnu izometriju konstruiramo na sljedeci nacin: kako su {T0, N0, B0} i {T0, N0, B0}dvije desne ortonormirane baze, to postoji ortogonalni operator r : R3 → R3, det r = 1,takav da je
r(T0) = T0, r(N0) = N0, r(B0) = B0. (1.4.5)
Definirajmo izometriju prostora f : R3 → R3, f = t◦r, pri cemu je translacija t translacijaza vektor c(s0)− r(c(s0)). Sada je
f(c(s0)) = t(r(c(s0))) = r(c(s0)) + c(s0)− r(c(s0))︸ ︷︷ ︸ = c(s0). (1.4.6)
Promotrimo sada sliku krivulje c(s) pri izometriji f tj. krivulju
f(c(s))
i pokazimo da ona zadovoljava iste Frenetove jednadzbe kao i krivulja c. Neka je {T,N,B}Frenetov trobrid od c, tada je {r(T ), r(N), r(B)} Frenetov trobrid od f(c). Kako je r fiksnarotacija, vrijedi
r(T )′ = r(T ′) = r(κN) = κ r(N)r(N)′ = r(N ′) = r(−κT + τB) = −κ r(T ) + τ r(B)r(B)′ = r(B′) = r(−τN) = −τ r(N)
Dakle, krivulje c i f(c) zadovoljavaju iste diferencijalne jednadzbe (Frenetove formule) iiste pocetne uvjete (1.4.5), (1.4.6) te zbog jedinstvenosti u Picard-Lindelofovom teoremuo sustavu linearnih diferencijalnih jednadzbi, vrijedi za svaki s
T (s) = r(T (s)), N(s) = r(N(s)), B(s) = r(B(s)),
gdje je {T , N , B} Frenetov trobrid krivulje c.
Takoderdc
ds= T (s) = r(T (s)) =
df(c(s))
ds,
odakle slijedic(s) = f(c(s)) + a,
gdje je a konstantan vektor. Medutim, c(s0) = f(c(s0)), sto povlaci a = 0. Dakle,
c(s) = f(c(s)), s ∈ I.
Jednadzbe κ = κ(s), τ = τ(s) nazivaju se prirodnim jednadzbama krivulje c (ne ovise okoordinatnom sustavu).
Zadaci
1. Izracunajte zakrivljenosti krivulje i odredite o kojoj se krivulji radi:
(i) c(t) = (√142 cos t+ 1, 1−
√142 cos t,
√7 sin t),

POGLAVLJE 1. LOKALNA TEORIJA KRIVULJA 31
(ii) c(t) = (45 cos t, 1− sin t,−35 cos t).
2. Dokazite da je krivulja c : R → R3 zadana s
c(t) = (a1t2 + b1t+ c1, a2t
2 + b2t+ c2, a3t2 + b3t+ c3)
ravninska (ai, bi, ci, i = 1, 2, 3 su konstante).
3. Odredite sve tocke na krivulji c : R → R3, c(t) = (t3, t, t2) u kojima oskulacijskaravnina na krivulju sadrzi tocku (−6, 2,−1
3).
4. Pokazite da je krivulja koja je presjek ploha x2 = 3y, 2xy = 9z opca cilindricnaspirala. Odredite jedinicno konstantno polje E s kojim zatvara konstantni kut.
5. Pokazite da je krivulja c(t) = (eat cos t, eat sin t, eat) opca cilindricna spirala. Pokaziteda ona lezi na kruznom stoscu x2 + y2 = z2. Odredite jedinicno konstantno poljeE s kojim zatvara konstantni kut. Pokazite da je njena projekcija na xy-ravninulogaritamska spirala tj. krivulja koja ima svojstvo da je kut izmedu vektora polozajatocke te krivulje i tangencijalnog vektora u toj tocki konstantan.
6. Pokazite da je krivulja opca cilindricna spirala ako i samo ako postoji jedinicnokonstantno polje E koje s poljem binormala krivulje c zatvara konstantni kut.
7. Dokazite da je krivulja c : R+ → R3 zadana s c(t) = (2t, ln t, t2) opca cilindricnaspirala. Odredite pripadne E i φ.
8. Za a, b, c ∈ R takve da je abc = 0 pokazite da je c(t) = (at, bt2, ct3) opca cilindricnaspirala ako i samo ako vrijedi 3ac = ±2b2.
9. Pokazite da je torzija zrcalne slike s obzirom na neku ravninu krivulje uR3 suprotnogpredznaka od torzije krivulje. Je li zrcaljenje s obzirom na ravninu pozitivna izome-trija prostora?
10. Utvrdite jesu li parabole c(t) = (t, t, t2) i d(t) = (√2 t, t2, 0), t ∈ R, kongruentne.
Nadite izometriju prostora koja ih povezuje.
11. Pokazite da su dvije krivulje parametrizirane duljinom luka c1 : I → R2, c2 : I → R2
kongruentne ako i samo ako je κ1 = ±κ2.
12. Odredite krivulju c : I → R2 kojoj je prirodna jednadzba κ(s) =1
s, s > 0 je duljina
luka te krivulje.
13. Normalna ravnina krivulje je ravnina razapeta vektorom glavne normale i binormale.
Ako su sve normalne ravnine krivulje c paralelne s istim pravcem, tada je ta krivuljaili pravac ili ravninska. Dokazite.
14. Ako glavne normale krivulje c koja je parametrizirana duljinom luka zatvaraju kons-tantan kut s jedinicnim vektorom e, tada je
(κ2 + τ2
κ · ( τκ)′)′ + τ = 0.
Dokazite.
Poglavlje 2
Globalna teorija krivulja
2.1 Globalna teorija krivulja
Definicija 2.1.1 Za regularnu krivulju c : R → R2 kazemo da je zatvorena ako postojipozitivna konstanta a ∈ R za koju je c(t + a) = c(t), za sve t ∈ R. Najmanja takvakonstanta naziva se periodom krivulje c.
Definicija 2.1.2 Za zatvorenu krivulju c : R → R2 s periodom a kazemo da je jednos-tavna1 ako je c(t) = c(t′) ako i samo ako je t′ − t = ka, za neki k ∈ Z.
Teorem o Jordanovoj krivulji kaze da svaka jednostavna zatvorena krivulja u ravniniima unutrasnjost i vanjstinu. Preciznije, skup tocaka koje nisu tocke krivulje je disjunktnaunija dva podskupa od R2 sa svojstvima:
1. unutrasnjost int(c) je ogranicen skup,
2. vanjstina ext(c) je neogranicen skup,
3. unutrasnjost int(c) i vanjstina ext(c) su povezani skupovi, tj. svake dvije tocke izistog skupa mogu biti povezane krivuljom koja je cijela sadrzana u tom skupu.
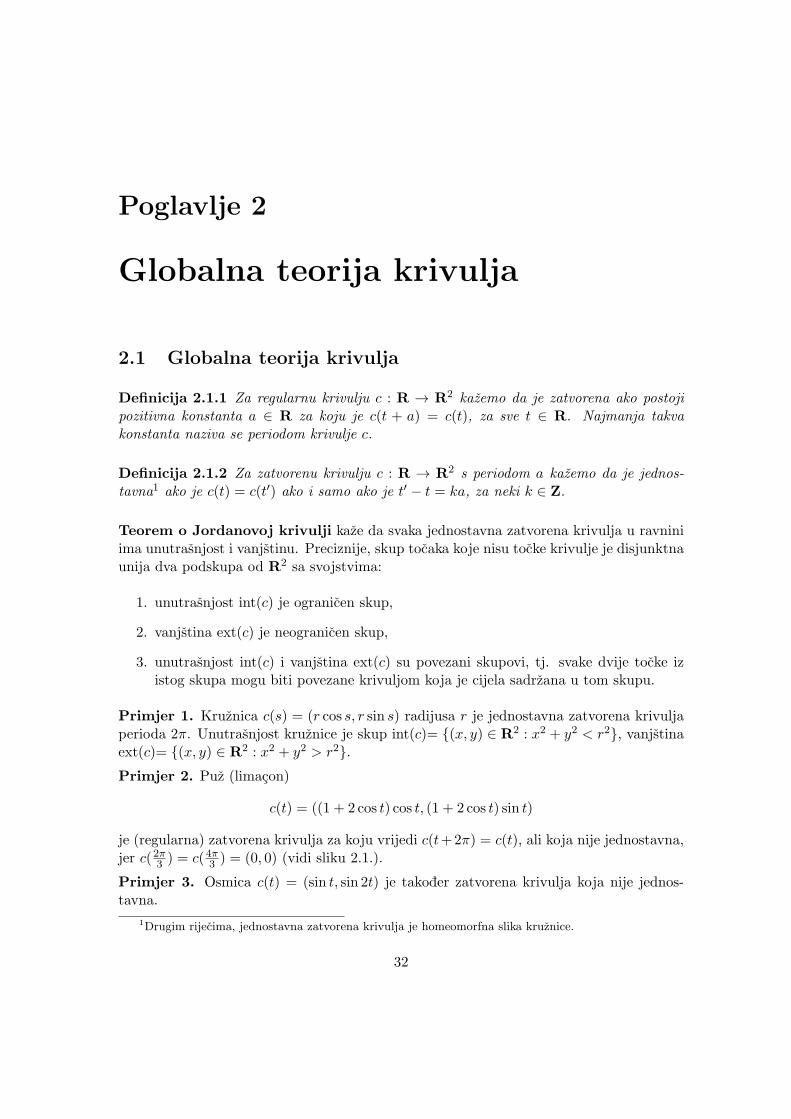
Primjer 1. Kruznica c(s) = (r cos s, r sin s) radijusa r je jednostavna zatvorena krivuljaperioda 2π. Unutrasnjost kruznice je skup int(c)= {(x, y) ∈ R2 : x2 + y2 < r2}, vanjstinaext(c)= {(x, y) ∈ R2 : x2 + y2 > r2}.Primjer 2. Puz (limacon)
c(t) = ((1 + 2 cos t) cos t, (1 + 2 cos t) sin t)
je (regularna) zatvorena krivulja za koju vrijedi c(t+2π) = c(t), ali koja nije jednostavna,jer c(2π3 ) = c(4π3 ) = (0, 0) (vidi sliku 2.1.).
Primjer 3. Osmica c(t) = (sin t, sin 2t) je takoder zatvorena krivulja koja nije jednos-tavna.
1Drugim rijecima, jednostavna zatvorena krivulja je homeomorfna slika kruznice.
32
POGLAVLJE 2. GLOBALNA TEORIJA KRIVULJA 33
0.5 1.0 1.5 2.0 2.5 3.0
-1.5
-1.0
-0.5
0.5
1.0
1.5
-1.0 -0.5 0.5 1.0
-1.0
-0.5
0.5
1.0
Slika 2.1: Puz i osmica
Primjer 4. Parabola i sinusoida nisu jednostavne zatvorene krivulje.
Uocimo sljedece svojstvo jednostavne zatvorene krivulje: ukoliko jednostavnu zatvorenukrivulju c s periodom a (re)parametriziramo duljinom luka c, tada je period reparametri-zacije duljinom luka c jednak broju L danom s
L =
∫ a
0||c(t)||dt.
Broj L je zapravo duljina luka jednostavne zatvorene krivulje c s periodom a (opseg kri-vulje). Zaista, sjetimo se da je funkcija duljine luka definirana kao
s(t) =
∫ t
0||c(t)||dt.
Pokazimo da je L period krivulje c. U tu svrhu, uocimo sljedece
s(t+ a) =
∫ t+a
0||c(t)||dt =
∫ a
0||c(t)||dt+
∫ t+a
a||c(t)||dt = L+ s(t),
pri cemu smo za odredivanje zadnjeg integrala koristili supstituciju u = t − a i cinjenicuda je a period od c. Analogno je
s(t+ ka) = kL+ s(t).
Prema tome je c(s+ kL) = c(s(t) + kL
)= c(s(t+ ka)
)= c(t+ ka) = c(t) = c(s), te je L
period od c.
Primjer 5. Parametrizacija kruznice radijusa r duljinom luka glasi
c(s) = (r coss
r, r sin
s
r).
Njezin period je jednak L = 2πr, koliko iznosi i duljina luka (opseg) kruznice.
Uocimo takoder da za kruznicu vrijedi sljedece∫ L
0κs(s)ds =
∫ L
0
1
rds = 2π.
To svojstvo vrijedi za sve zatvorene krivulje:
POGLAVLJE 2. GLOBALNA TEORIJA KRIVULJA 34
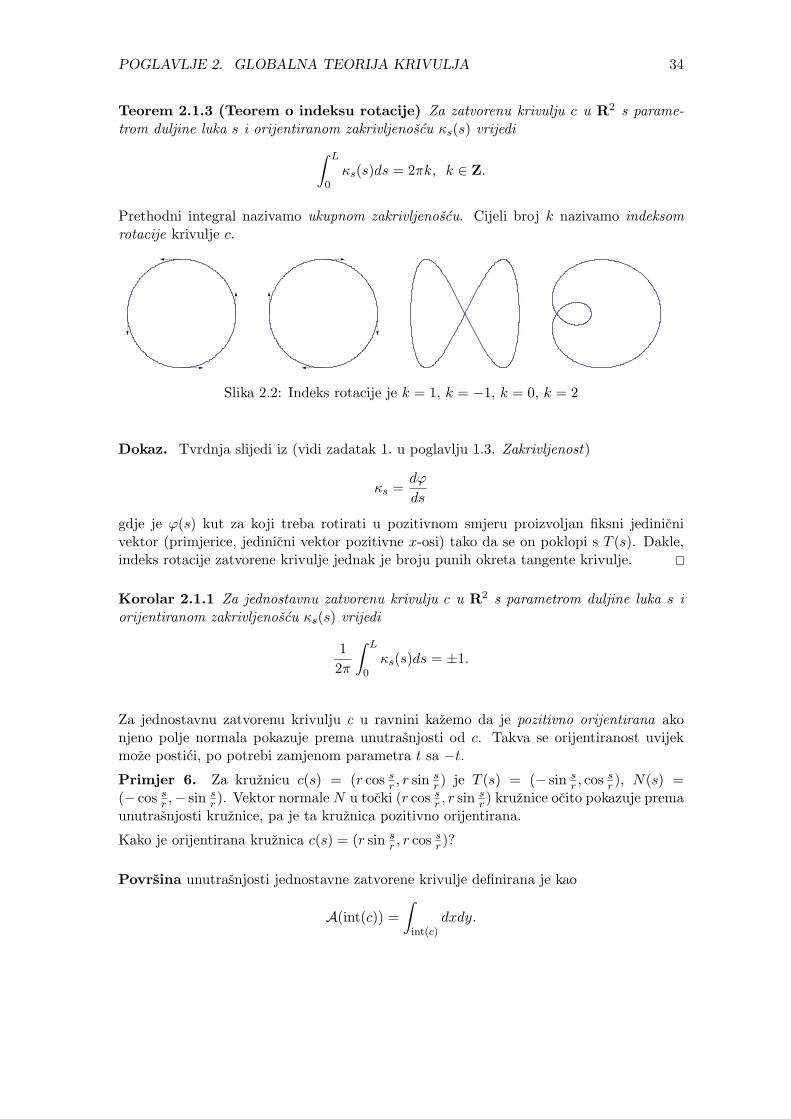
Teorem 2.1.3 (Teorem o indeksu rotacije) Za zatvorenu krivulju c u R2 s parame-trom duljine luka s i orijentiranom zakrivljenoscu κs(s) vrijedi∫ L
0κs(s)ds = 2πk, k ∈ Z.
Prethodni integral nazivamo ukupnom zakrivljenoscu. Cijeli broj k nazivamo indeksomrotacije krivulje c.
Slika 2.2: Indeks rotacije je k = 1, k = −1, k = 0, k = 2
Dokaz. Tvrdnja slijedi iz (vidi zadatak 1. u poglavlju 1.3. Zakrivljenost)
κs =dφ
ds
gdje je φ(s) kut za koji treba rotirati u pozitivnom smjeru proizvoljan fiksni jedinicnivektor (primjerice, jedinicni vektor pozitivne x-osi) tako da se on poklopi s T (s). Dakle,indeks rotacije zatvorene krivulje jednak je broju punih okreta tangente krivulje.
Korolar 2.1.1 Za jednostavnu zatvorenu krivulju c u R2 s parametrom duljine luka s iorijentiranom zakrivljenoscu κs(s) vrijedi
1
2π
∫ L
0κs(s)ds = ±1.
Za jednostavnu zatvorenu krivulju c u ravnini kazemo da je pozitivno orijentirana akonjeno polje normala pokazuje prema unutrasnjosti od c. Takva se orijentiranost uvijekmoze postici, po potrebi zamjenom parametra t sa −t.
Primjer 6. Za kruznicu c(s) = (r cos sr , r sin
sr ) je T (s) = (− sin s
r , cossr ), N(s) =
(− cos sr ,− sin s
r ). Vektor normale N u tocki (r cos sr , r sin
sr ) kruznice ocito pokazuje prema
unutrasnjosti kruznice, pa je ta kruznica pozitivno orijentirana.
Kako je orijentirana kruznica c(s) = (r sin sr , r cos
sr )?
Povrsina unutrasnjosti jednostavne zatvorene krivulje definirana je kao
A(int(c)) =
∫int(c)
dxdy.

POGLAVLJE 2. GLOBALNA TEORIJA KRIVULJA 35
Po Greenovom teoremu za glatke realne funkcije f = f(x, y), g = g(x, y) i pozitivnoorijentiranu krivulju c vrijedi∫
int(c)(∂g
∂x− ∂f
∂y)dxdy =
∫cf(x, y)dx+ g(x, y)dy.
Primijenimo li Greenov teorem na funkcije f(x, y) = −12y, g(x, y) = 1
2x, dobivamoda je povrsina unutrasnjosti pozitivno orijenirane jednostavne zatvorene krivulje c(t) =(x(t), y(t)) dana sa
A(int(c)) =1
2
∫ a
0(xy − yx) dt.
Uocimo da povrsina A ne ovisi o parametrizaciji krivulje.
Primjer 7. Povrsina unutrasnosti kruznice c(t) = (r cos t, r sin t) je
A(int(c)) =1
2
∫ 2π
0(r cos t · r cos t− r sin t · (−r sin t)) =
1
2
∫ 2π
0r2 = r2π.
Teorem 2.1.4 (Izoperimetrijska nejednakost) Neka je c jednostavna zatvorena kri-vulja, L(c) njena duljina luka (opseg), A(int(c)) povrsina unutrasnjosti od c. Tada je
A(int(c)) ≤ 1
4πL(c)2,
pri cemu jednakost vrijedi ako i samo ako je c kruznica.
Na kraju, izrecimo teorem o tjemenima konveksne krivulje u ravnini. Jednostavna zatvo-rena krivulja je konveksna ako je njezina unutrasnjost konveksan skup (tj. spojnica bilokoje dvije tocke iz unutrasnjosti je sadrzana u unutrasnjosti). Tjeme krivulje je staci-onarna tocka zakrivljenosti krivulje. Moze se pokazati da definicija tjemena ne ovisi oparametrizaciji.
Teorem 2.1.5 (Teorem o cetiri tjemena) Svaka konveksna jednostavna zatvorena kri-vulja u ravnini ima barem cetiri tjemena.
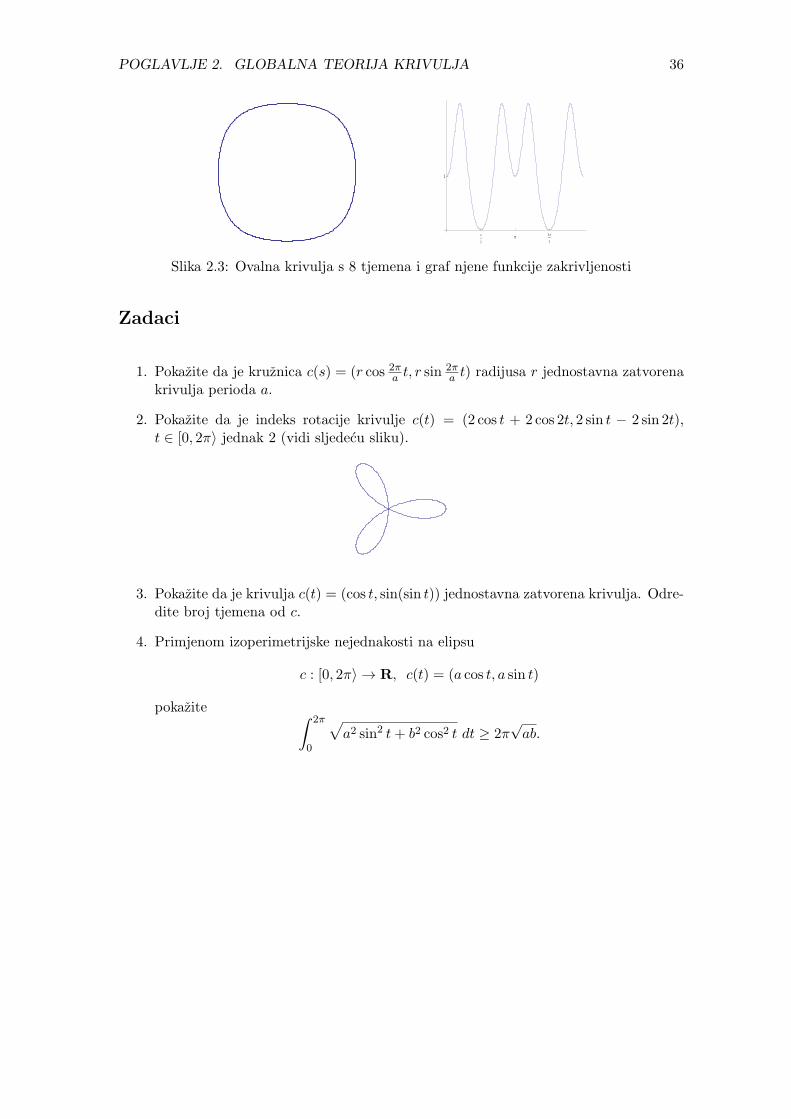
Oval je jednostavna zatvorena krivulja za koju je ili κ(s) > 0 ili κ(s) < 0, za sve s ∈ I.Na slici 2.2 prikazana je ovalna krivulja
c(t) = (cos t, sin(sin(sin t))).
POGLAVLJE 2. GLOBALNA TEORIJA KRIVULJA 36
Π
2Π
3 Π
2
1
Slika 2.3: Ovalna krivulja s 8 tjemena i graf njene funkcije zakrivljenosti
Zadaci
1. Pokazite da je kruznica c(s) = (r cos 2πa t, r sin 2π
a t) radijusa r jednostavna zatvorenakrivulja perioda a.
2. Pokazite da je indeks rotacije krivulje c(t) = (2 cos t + 2 cos 2t, 2 sin t − 2 sin 2t),t ∈ [0, 2π⟩ jednak 2 (vidi sljedecu sliku).
3. Pokazite da je krivulja c(t) = (cos t, sin(sin t)) jednostavna zatvorena krivulja. Odre-dite broj tjemena od c.
4. Primjenom izoperimetrijske nejednakosti na elipsu
c : [0, 2π⟩ → R, c(t) = (a cos t, a sin t)
pokazite ∫ 2π
0
√a2 sin2 t+ b2 cos2 t dt ≥ 2π
√ab.

Poglavlje 3
Lokalna teorija ploha
3.1 Ploha - definicija i primjeri
Definicija 3.1.1 Podskup S ⊂ R3 je ploha ako za svaku tocku p ∈ S postoji otvorenaokolina V ∈ R3 i preslikavanje x : U → V ∩ S s otvorenog skupa U ∈ R2 koje je
1◦ homeomorfizam otvorenih skupova,
2◦ glatko preslikavanje.
Ako je i diferencijal preslikavanja x injektivan, za plohu kazemo da je regularna (tj. da jex regularno).
Preslikavanje x nazivamo parametrizacijom (lokalnim koordinatama, (koordinatnom) kar-tom (eng. patch) okoline tocke p plohe S. Pisemo x = (x(u, v), y(u, v), z(u, v)).
Promotrimo diferencijal preslikavanja x. Diferencijal je linearni operator Dx : R2 → R3
u paru kanonskih baza dan matricom (Jacobijevom matricom)∂x∂u
∂x∂v
∂y∂u
∂y∂v
∂z∂u
∂z∂v
.
Diferencijal je injektivan ako i samo ako je njegova jezgra trivijalna, odnosno ako i samoako je njegova slika 2-dimenzionalna. Slika odDx razapeta je stupcima Jacobijeve matrice,stoga slijedi da je diferencijal je injektivan ako i samo ako su vektori
xu :=∂x
∂u, xv :=
∂x
∂v
linearno nezavisni. To je ako i samo ako je
xu × xv = 0.
37

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 38
Taj uvjet ce omoguciti definiranje tangencijalne ravnine u svakoj tocki plohe S.
Bijektivnost u prvom uvjetu povlaci da ploha nema samopresjecanja, a neprekidnostinverza je nuzna za dokazavanje neovisnosti nekih velicina o parametrizaciji.
Primjer 1. Ravnina
Neka su a, b ∈ R3 nekolinearni vektori. Ravnina je zadana parametarskom jednadzbom
x(u, v) = au+ bv + c, u, v ∈ R,
gdje je c je konstantni vektor u R3.
Preslikavanje x je ocito neprekidno. Pokazimo da je i x−1 neprekidno. Za tocku p ravnine,p = x(u, v) = au + bv + c, odredimo pripadne parametre u, v, x−1(p) = (u, v). Njihdobivamo iz vektorske jednadzbe
p− c = au+ bv
koja nakon skalarnog mnozenja s a, b prelazi u sustav za u, v
(p− c) · a = a2 u+ a · b v
(p− c) · b = a · b u+ b2 v
koji ima jedinstveno rjesenje (jer su a, b nekolinearni (linearno nezavisni) vektori). Speci-jalno, ako a, b cine ortonormirani skup, tada je u = (p− c) · a, v = (p− c) · b. Iz izraza zax−1, slijedi da je ono neprekidno.
Nadalje, vrijedixu = a, xv = b,
sto povlaci da je ravnina ocito regularna ploha (pokrivena jednom kartom).
Primjer 2. (Jedinicna) sfera
S2 = {(x, y, z) ∈ R3 : x2 + y2 + z2 = 1}
je regularna ploha.
Pokazimo da je x : U → R3, U = {(x, y) ∈ R2 : x2 + y2 < 1},
x(x, y) = (x, y,√
1− x2 − y2)
parametrizacija gornje otvorene polusfere.
Kako je x2 + y2 < 1, to je preslikavanje x glatko, jer ima neprekidne parcijalne derivacijesvih redova. Njegov inverz x−1 je neprekidan, jer je on restrikcija projekcije na prve dvijekoordinate, x−1(x, y, z) = (x, y). Provjerimo jos regularnost. Diferencijal preslikavanja x 1 0
0 1∂(√
1−x2−y2)∂x
∂(√
1−x2−y2)∂y

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 39
ima ocito linearno nezavisne stupce.
Donju otvorenu polusferu mozemo parametrizirati s
x(x, y) = (x, y,−√1− x2 − y2).
Analogna preslikavanja definiramo za desnu i lijevu, prednju i straznju otvorenu polusferu
x(x, z) = (x,√1− x2 − z2, z)
x(x, z) = (x,−√1− x2 − y2, z)
x(y, z) = (√1− y2 − z2, y, z)
x(y, z) = (−√1− y2 − z2, y, z).
Time smo pokazali da je sfera regularna ploha.
U prakticnim problemima najcesce se koristi geografska parametrizacija sfere. Neka je
U = {(φ, ϕ) : 0 < φ < 2π,−π/2 < ϕ < π/2}.
Preslikavanje x : U → R3 definirano je s
x(φ, ϕ) = (cosϕ cosφ, cosϕ sinφ, sinϕ).
Ocito je skup x(U) ⊂ S2, preciznije x(U) pokriva cijelu sferu osim polukruznice od sjever-nog pola (0, 0, 1) do juznog pola (0, 0,−1) u xz-ravnini (ravnini y = 0), za koju je x ≥ 0.Parametarske ϕ-krivulje nazivaju se meridijani, a φ-krivulje paralele. Ovu parametrizaciju
Slika 3.1: Polukruznica koja nedostaje i parametarske krivulje na sferi
nazivamo geografskom.
Nadalje, pokazimo da je preslikavanje x injektivno na domeni. Da bismo pokazali daje x regularna karta, trebamo jos pokazati da je x glatko preslikavanje s injektivnimdiferencijalom i homemorfizam odgovarajucih otvorenih skupova.
Ocito je x glatko preslikavanje, jer su sve njegove parcijalne derivacije neprekidne. Jaco-bijeva matrica je dana s − cosϕ sinφ − sinϕ cosφ
cosϕ cosφ − sinϕ sinφ0 cosϕ

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 40
Ona je je ranga 1 ako i samo je cosϕ = 0, sto se ne desava u tockama skupa U .
Inverz preslikavanja x, x−1 : x(U) → U , je jednoznacno odreden. Njegova neprekidnostslijedi iz Propozicije 3.1.2.
Uocimo da smo za domenu uzeli {(φ, ϕ) : 0 ≤ φ ≤ 2π,−π/2 ≤ ϕ ≤ π/2}, tada bismopokrili cijelu sferu, no taj skup ne moze biti domena karte.
Sferu moramo pokriti jos jednom kartom koja pokriva polukruznicu koja nedostaje u prvojkarti. Neka je x : U → R3,
x(φ, ϕ) = (− cosϕ cosφ,− sinϕ,− cosϕ sinφ).
Ta je karta pokriva podrucje sfere bez polukruznice od tocke (0,−1, 0) do tocke (0, 1, 0) uxy-ravnini (ravnini z = 0) za koju je x ≤ 0.
Primjer 3. Neka je f : U → R glatka funkcija, U ⊂ R2 otvoren. Tada je njen graf
Γ(f) = {(x, y, z) ∈ R3 : z = f(x, y)}
regularna ploha. Jednadzba z = f(x, y) naziva se eksplicitnom jednadzbom plohe.
Zaista, skup Γ(f) mozemo pokriti jednom kartom x : U → R3, U ⊂ R2,
x(u, v) = (u, v, f(u, v)).
Preslikavanje x je ocito glatko i injektivno, te je i homeomorfizam na sliku, x−1(p1, p2, p3) =(p1, p2). Njegova Jacobijeva matrica 1 0
0 1∂f∂u
∂f∂v
ocito ima linearno nezavisne stupce, te je preslikavanje x regularno.
Prethodna ploha je primjer tzv. jednostavne plohe, tj. plohe koja se moze pokriti jednomkartom.
Primjer 4. Neka je g : U → R, U ⊂ R3otvoren, glatka funkcija. Podskup
S = {(x, y, z) ∈ R3 : g(x, y, z) = c} = ∅,

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 41
gdje je c ∈ R, je regularna ploha ako je gradijent1 funkcije g
∇g := (∂g
∂x,∂g
∂y,∂g
∂z)
razlicit od 0 u svim tockama od S.
Zaista, neka je p ∈ S po volji odabrana tocka skupa S. Moramo naci kartu koja pokrivaokolinu od p. Kako je ∇g(p) = 0, to je barem jedna parcijalna derivacija od g u tocki prazlicita od 0. Neka je, primjerice, ∂g
∂z (p) = 0. Prema Teoremu o implicitnim funkcijama,jednadzba g(x, y, z) = c dade se rijesiti po z, odnosno, postoji glatka funkcija f : U → R,U ⊂ R2 otvoren, takva da vrijedi
1◦ g(u, v, f(u, v)) = c, (u, v) ∈ U ,
2◦ tocke (u, v, f(u, v)), (u, v) ∈ U , cine otvorenu okolinu tocke p.
Odavde slijedi da je preslikavanje x : U → R3, x(u, v) = (u, v, f(u, v)) karta oko p (Primjer3). Zbog proizvoljnosti od p, dokazali smo da je S regularna ploha.
Jednadzba g(x, y, z) = c naziva se implicitnom jednadzbom plohe. Plohe tako zadanenazivaju se nivo-plohama.
Zadatak 1. Uvjerite se i na taj nacin da je sfera zadana implicitnom jednadzbom x2 +y2 + z2 = 1 regularna ploha.Uputa. ∇g = 0 samo za (x, y, z) = (0, 0, 0) sto nije tocka sfere.
Sljedeca propozicija kaze da ukoliko znamo da je S regularna ploha i imamo potencijalnunjezinu regularnu parametrizaciju x, tada ne trebamo utvrdivati da je x−1 neprekidno.Tu smo propoziciju koristili kod geografske parametrizacije sfere.
Propozicija 3.1.2 Neka je p tocka regularne plohe S. Neka je x : U → R3 glatko,injektivno preslikavanje takvo da je p ∈ x(U) ⊂ S i kojemu je diferencijal injektivan.Tada je x−1 neprekidno preslikavanje.
U dokazu Propozicije 3.1.2 koristimo sljedecu propoziciju:
Propozicija 3.1.3 Neka je S regularna ploha i p ∈ S tocka na S. Tada postoji okolinaV tocke p u S takva da je V graf neke glatke funkcije oblika z = f(x, y), y = g(x, z) ilix = h(y, z).
Dokaz. [Propozicije 3.1.2]
1Za gradijent realne funkcije g : U → R u ovoj skripti koristimo oznaku ∇g. Opcenito, jos se koristigrad g.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 42
Neka je p ∈ x(U) ⊂ S. Kako je ploha S regularna, to postoji okolina W ⊂ S tocke p nakojoj je W graf neke glatke funkcije, primjerice z = f(x, y) nad otvorenim skupom V uxy-ravnini (Propozicija 3.1.3). Definirajmo
U1 = x−1(W ) ⊂ U, h = π ◦ x : U1 → V, V ⊂ R2,
a π(x, y, z) = (x, y) je projekcija na prve dvije koordinate. Za diferencijal preslikavanja hvrijedi (π je linearni operator!)
Dh = Dπ ◦Dx = π ◦Dx.
Odavde zakljucujemo da je diferencijal Dh regularan operator u tocki x−1(p). Sada poTeoremu o inverznoj funkciji postoji okolina U2 ⊂ U1 tako da je preslikavanje h : U2 →h(U2) glatki difeomorfizam. Zbog toga je
x−1 = h−1 ◦ π
neprekidno preslikavanje na otvorenoj okolini x(U2) od p kao kompozicija neprekidnihpreslikavanja.
Dokaz. [Propozicije 3.1.3]
Neka je x : U → S, U ⊂ R2, lokalna parametrizacija od S okoline tocke p. Pisemo
x(u, v) = (x(u, v), y(u, v), z(u, v)).
Kako je diferencijal od x injektivan, to postoji regularna minora Jacobijeve matrice reda2. Prema tome, jedna od determinanti
∂(x, y)
∂(u, v),
∂(y, z)
∂(u, v),
∂(x, z)
∂(u, v)
nije 0. Pretpostavimo da∂(x, y)
∂(u, v)= 0 (3.1.1)
i promotrimo preslikavanje π ◦ x : U → R2, gdje je π(x, y, z) = (x, y) projekcija, tj.
(π ◦ x)(u, v) = (x(u, v), y(u, v)).
Uz uvjet (3.1.1) za funkciju, Teorem o inverznoj funkciji u okolini tocke π ◦ x garantirapostojanje okolina V1 ⊂ U od q = x−1(p) ∈ U i V2 od (π ◦x)(q) na kojima je preslikavanjeπ ◦ x : V1 → V2 glatki difeomorfizam. Dakle, na tim skupovima imamo
(π ◦ x)−1(x, y) = (u(x, y), v(x, y)).
Drugim rijecima, parametre u, v smo izrazili kao funkcije od x, y. Sada trecu koordinatnufunkciju z(u, v) parametrizacije x mozemo pisati kao z(x, y), sto smo i htjeli pokazati.
Analogno bismo dokazali u slucaju da je neka druga minora reda 2 Jacobijeve matriceregularna.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 43
Navedimo jos neke primjere ploha.
Primjer 5. Rotacijske plohe
Skup tocaka koji nastaje rotacijom neke ravninske krivulje oko pravca u toj ravnini (koji nesijece krivulju) nazivamo rotacijskom plohom. Krivulju koja rotira nazivamo generatrisomplohe, a pravac oko kojeg krivulja rotira osi rotacije.
Odredimo implicitnu jednadzbu rotacijske plohe. Neka je, primjerice, u yz-ravnini zadanakrivulja f(y, z) = c, c ∈ R, i neka ona rotira oko z-osi. Neka je, nadalje, T = (x, y, z)bilo koja tocka rotacijske plohe. Ona je dobivena rotacijom tocke T krivulje f oko z-osi.Odredimo koordinate tocke T . Oznacimo na z-osi tocku S koja je srediste kruznice kojuopisuje tocka T pri rotaciji. Tada je
|ST | = |ST | =√x2 + y2.
Prema tome, koordinate tocke T su (0,√
x2 + y2, z). U yz-sustavu tocka T ima koordinateT = (
√x2 + y2, z). Kako je T tocka rotirane krivulje, to je
f(√x2 + y2, z) = c.
Prethodna jednadzba je implicitna jednadzba rotacijske plohe. Provjerite da je skup tocakadefiniranih s tom jednadzbom zaista ploha.
Kruznice koje nastaju rotacijom fiksne tocke krivulje koja rotira nazivaju se paralele rota-cijske plohe, a krivulje koje su razliciti polozaji rotirane krivulje meridijani.
Ako parametriziramo profilnu krivulju sa c(u) = (0, f(u), g(u)), tada je parametrizacijarotacijske plohe dana sa
x(u, v) = (f(u) sin v, f(u) cos v, g(u)), u ∈ I ⊂ R, v ∈ ⟨0, 2π⟩.
Primjer 5.1. Jednoplosni rotacijski hiperboloid nastaje rotacijom hiperbole y2 − z2 = 1oko z-osi. Njegova jednadzba je
f(√x2 + y2, z) = x2 + y2 − z2 = 1.
Dakle, jednoplosni rotacijski hiperboloid je algebarska ploha drugog reda.
Primjer 5.2. Dvoplosni rotacijski hiperboloid nastaje rotacijom hiperbole y2 − z2 = −1oko z-osi. Njegova jednadzba je
f(√
x2 + y2, z) = x2 + y2 − z2 = −1.
Primjer 5.3. Torus je rotacijska ploha koja nastaje rotacijom kruznice radijusa r u,primjerice, yz-ravnini oko z-osi. Srediste rotirane kruznice se pritom giba po kruzniciradijusa R. Kako ploha ne bi imala samopresjecanja, uzimamo r < R. Takav torus
POGLAVLJE 3. LOKALNA TEORIJA PLOHA 44
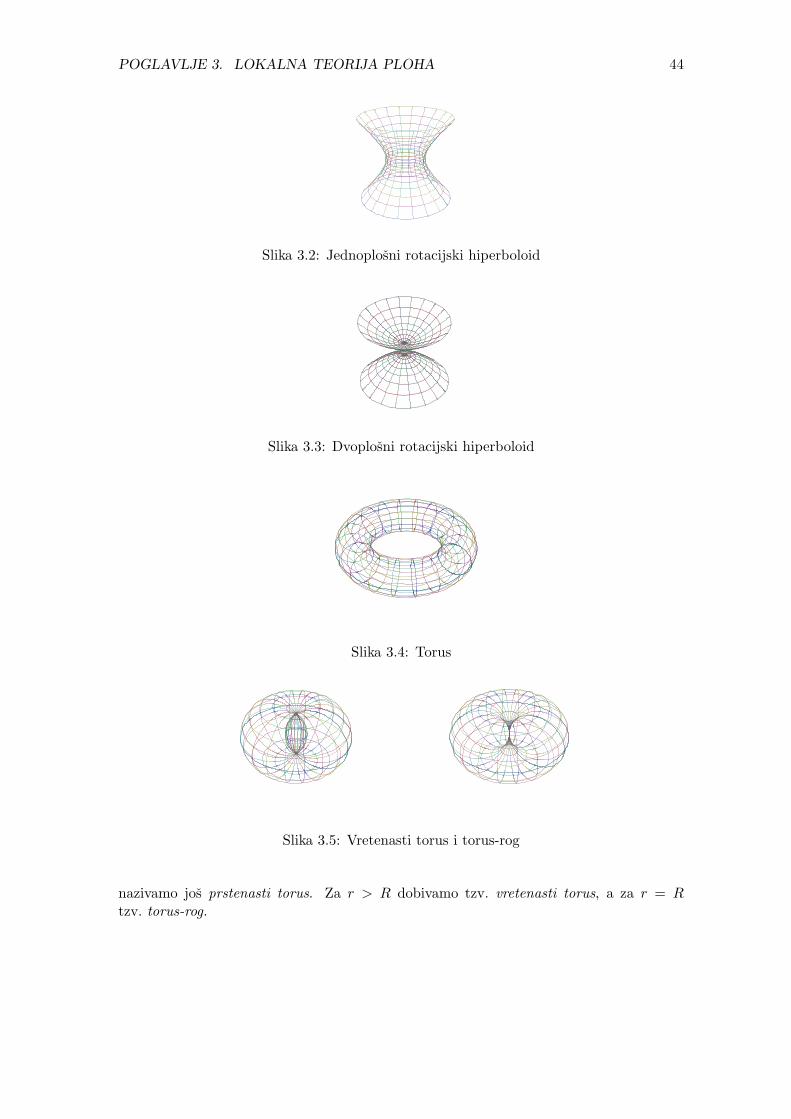
Slika 3.2: Jednoplosni rotacijski hiperboloid
Slika 3.3: Dvoplosni rotacijski hiperboloid
Slika 3.4: Torus
Slika 3.5: Vretenasti torus i torus-rog
nazivamo jos prstenasti torus. Za r > R dobivamo tzv. vretenasti torus, a za r = Rtzv. torus-rog.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 45
Jednadzba kruznice koja rotira je
(y −R)2 + z2 = r2, x = 0.
Prema tome, implicitna jednadzba torusa je
(√x2 + y2 −R)2 + z2 = r2
ili(x2 + y2 +R2 + z2 − r2)2 − 4R2(x2 + y2) = 0.
Dakle, torus je algebarska ploha 4. tog reda.
Primjer 5.4. Katenoid je rotacijska ploha koja nastaje rotacijom lancanice y = a chxoko x-osi.
Slika 3.6: Katenoid
Zadatak 2. Parametrizirajte navedene rotacijske plohe.
Primjerice,
x(u, v) = (a chu sin v, b chu cos v, c shu), u ∈ I ⊂ R, v ∈ ⟨0, 2π⟩
je parametrizacija (dijela) jednoplosnog hiperboloidax2
a2+
y2
b2− z2
c2= 1 (koji je rotacijski
za a = b).
Nadalje, parametrizacija torusa je dana sa
x(u, v) = ((R+ r cosu) cos v, (R+ r cosu) sin v, r sinu).
Primjer 6. Pravcaste plohe
Neka je c : I → R regularna krivulja, e = e(u) jedinicno polje duz c. Jednostavna plohakoja dopusta parametrizaciju
x(u, v) = c(u) + ve(u), u ∈ I, v ∈ R,
naziva se pravcastom plohom.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 46
Da bi skup tocaka definiran tom parametrizacijom bio regularna ploha, nuzno je
xu × xv = c× e+ v e× e = 0.
Primjer 6.1. Jednoplosni hiperboloidx2
a2+
y2
b2− z2
c2= 1 ima sljedecu parametrizaciju
kao pravcasta ploha
x(u, v) = (a cosu−av sinu, bv cosu+b sinu, cv) = (a cosu, b sinu, 0)+v(−a sinu, b cosu, c).
Da je jednoplosni hiperboloid pravcasta ploha, mozemo pokazati i sljedecim transformi-
Slika 3.7: Jednoplosni hiperboloid kao pravcasta ploha
ranjem njegove implicitne jednadzbe. Ukoliko pisemo
y2
b2− z2
c2= 1− x2
a2
odnosno(y
b− z
c)(y
b+
z
c) = (1− x
a)(1 +
x
a),
tada zakljucujemo da skupovi tocaka sa sljedecim jednadzbama zadovoljavaju polaznujednadzbu jednoplosnog hiperboloida
k(y
b− z
c) = 1− x
a,
y
b+
z
c= k(1 +
x
a), k ∈ R,
l(y
b+
z
c) = 1− x
a,
y
b− z
c= l(1 +
x
a), l ∈ R.
Sto su ti skupovi tocaka? To su dvije familije pravaca koji su zadani kao presjeci ravnina(ravnine su zadane linearnim jednadzbama u x, y, z). Prema tome, jednoplosni hiperboloidje ”dvostruko pravcasta ploha”.
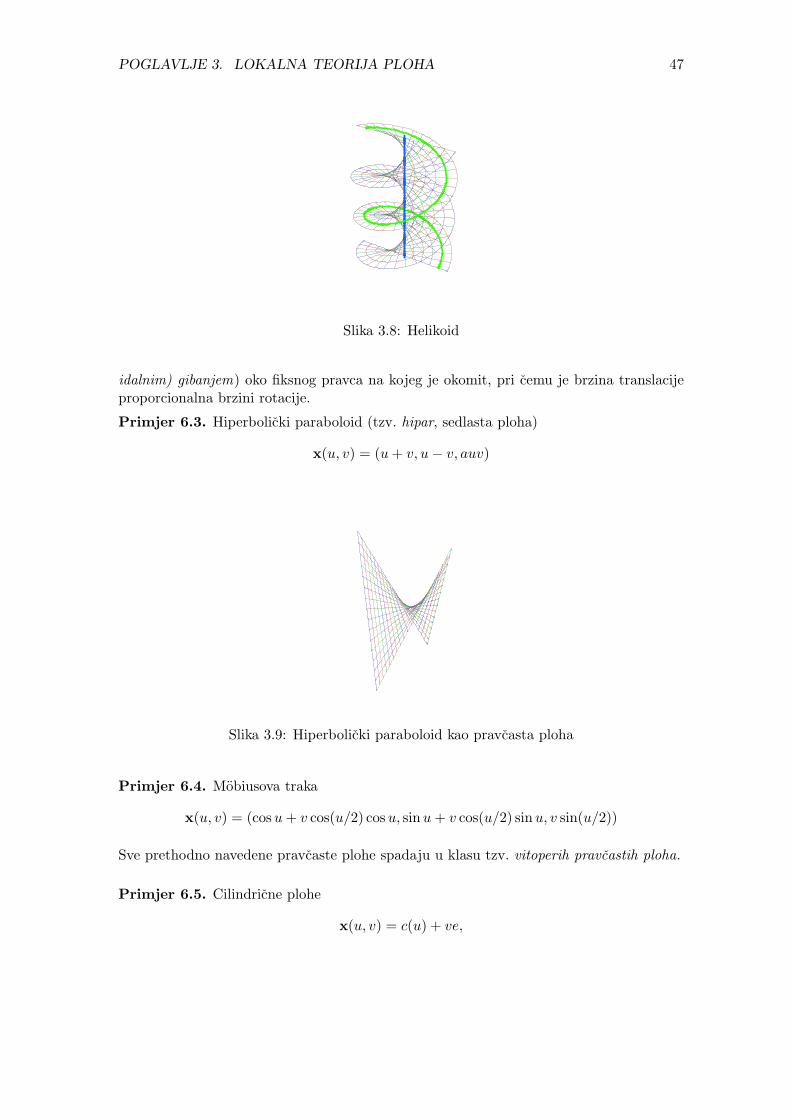
Primjer 6.2. Helikoid
x(u, v) = (v cosu, v sinu, bu) = (0, 0, bu) + v(cosu, sinu, 0)
Helikoid nastaje istovremenom rotacijom i translacijom pravca (tzv. zavojnim (heliko-
POGLAVLJE 3. LOKALNA TEORIJA PLOHA 47
Slika 3.8: Helikoid
idalnim) gibanjem) oko fiksnog pravca na kojeg je okomit, pri cemu je brzina translacijeproporcionalna brzini rotacije.
Primjer 6.3. Hiperbolicki paraboloid (tzv. hipar, sedlasta ploha)
x(u, v) = (u+ v, u− v, auv)
Slika 3.9: Hiperbolicki paraboloid kao pravcasta ploha
Primjer 6.4. Mobiusova traka
x(u, v) = (cosu+ v cos(u/2) cosu, sinu+ v cos(u/2) sinu, v sin(u/2))
Sve prethodno navedene pravcaste plohe spadaju u klasu tzv. vitoperih pravcastih ploha.
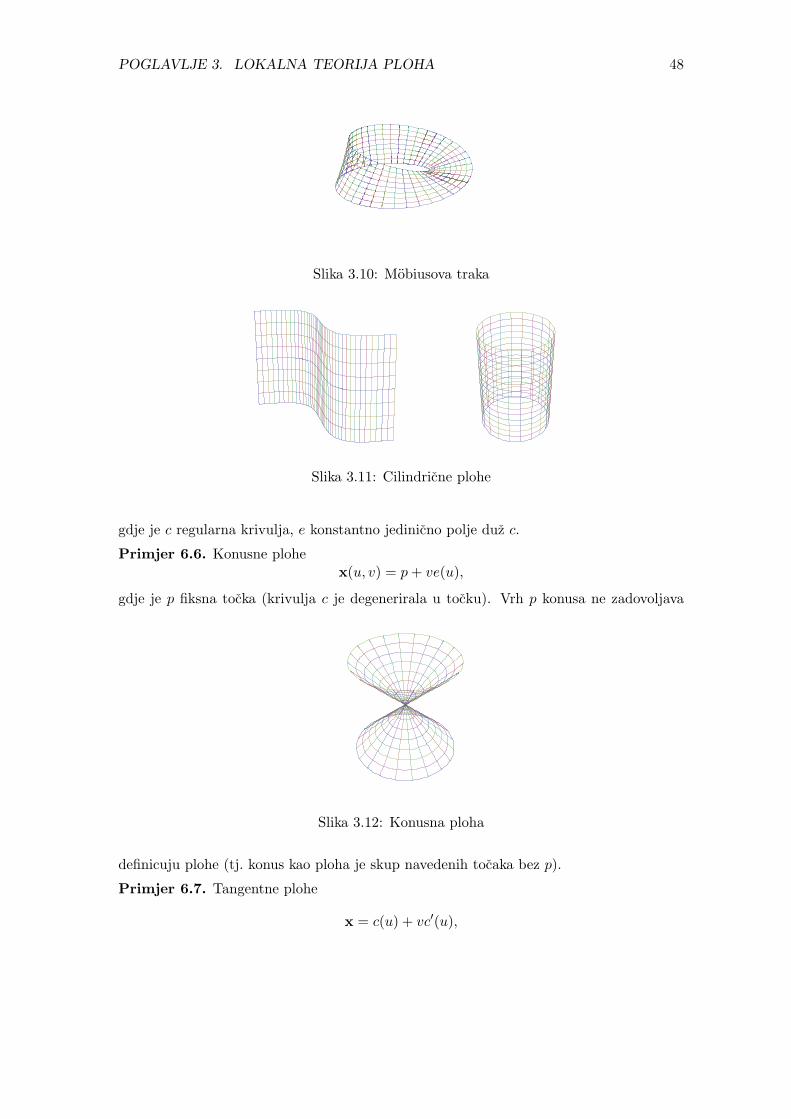
Primjer 6.5. Cilindricne plohe
x(u, v) = c(u) + ve,
POGLAVLJE 3. LOKALNA TEORIJA PLOHA 48
Slika 3.10: Mobiusova traka
Slika 3.11: Cilindricne plohe
gdje je c regularna krivulja, e konstantno jedinicno polje duz c.
Primjer 6.6. Konusne plohex(u, v) = p+ ve(u),
gdje je p fiksna tocka (krivulja c je degenerirala u tocku). Vrh p konusa ne zadovoljava
Slika 3.12: Konusna ploha
definicuju plohe (tj. konus kao ploha je skup navedenih tocaka bez p).
Primjer 6.7. Tangentne plohe
x = c(u) + vc′(u),

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 49
gdje je c regularna krivulja (bez smanjenja opcenitosti parametrizirana duljinom luka), c′
njezino tangencijalno polje. Tangentne plohe nisu regularne duz krivulje c – ona se naziva
Slika 3.13: Tangentna ploha obicne cilindricne spirale
grebenom tih ploha.
Cilindricne, konusne i tangentne plohe spadaju u klasu tzv. razvojnih pravcastih ploha.
Primjer 7. Translacijske (klizne) plohe
Translacijske plohe nastaju gibanjem jedne krivulje po drugoj. Preciznije, neka su c1(u) ic2(v) dvije regularne krivulje. Jednostavna ploha koja dopusta parametrizaciju
x(u, v) = c1(u) + c2(v)
naziva se translacijskom plohom. Krivulje c1(u) i c2(v) nazivamo generatrisama plohe.
Da bi skup tocaka definiran tom parametrizacijom bio regularna ploha, nuzno je
xu × xv = c1(u)× c2(v) = 0,
odnosno tangencijalni vektori krivulja generatrisa ne smiju biti kolinearni.
Za fiksne vrijednosti parametra jednog parametra, pripadne parametarske krivulje sumedusobno kongruentne krivulje.
Primjerice, kruzni cilindar je translacijska ploha. Nastaje gibanjem pravca po kruznici iliobrnuto. Daljnji primjeri su elipticki i hiperbolicki paraboloid.
Uocite da elipticki i hiperbolicki paraboloid nastaju gibanjem jedne parabole po drugoj.
Zadaci
1. Stereografska projekcija tocki P = (x, y, z), P = N , sfere S2 pridruzuje tocku xy-ravnine dobivenu kao probodiste pravca kroz P i sjeverni pol N = (0, 0, 1) s ravni-nom. Stereografska projekcija u koordinatama dana je s
x′ =x
1− z, y′ =
y
1− z.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 50
Slika 3.14: Elipticki paraboloid z = x2 + y2 kao translacijska ploha
Slika 3.15: Hiperbolicki paraboloid z = x2 − y2 kao translacijska ploha
Inverz stereografske projekcije je stereografsko preslikavanje koje svakoj tocki ravninepridruzuje tocku sfere (osim sjevernog pola)
x(u, v) = (2u
u2 + v2 + 1,
2v
u2 + v2 + 1,u2 + v2 − 1
u2 + v2 + 1)
Pokazite da je x parametrizacija sfere bez jedne tocke (tzv. racionalna parametriza-cija).
2. Pokazite da je preslikavanje σ : R× ⟨0, 2π⟩ → R3,
σ(u, v) =1
chu(cos v, sin v, shu)
parametrizacija dijela sfere (kojeg?). Preslikavanje σ naziva se Mercatorova presli-kavanje.
3. Pokazite da je elipsoidx2
a2+
y2
b2+
z2
c2= 1 regularna ploha.
4. Za koje je c ∈ R funkcijom g(x, y, z) = c zadana regularna ploha, ako je
g(x, y, z) = x(x+ 1) + y3 + yz?
5. Ploha je zadana parametarskim jednadzbama
x = a cos3 u cos3 v, y = a cos3 u sin3 v, z = a sin3 u,
u ∈ [−π2 ,
π2 ], v ∈ [−π, π], a > 0. Odredite implicitnu jednadzbu te plohe.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 51
6. Ispitajte je li skup
S = {(x, y, z) ∈ R3 : x = 2u+ v, y = 4u2 + 4uv + v2, z = e2uev}
regularna ploha.
7. Napisite parametarske jednadzbe katenoida koji se dobije rotacijom lancanice (uxz-ravnini) x = a ch z
a oko z-osi.
8. Napisite parametarske jednadzbe torusa koji nastaje rotacijom kruznice (u yz-ravnini)(y −R)2 + z2 = r2 oko z-osi.
9. Napisite parametarske jednadzbe pseudosfere koja nastaje rotacijom traktrise
c : ⟨−π, π⟩ → R2
c(t) = (−a ln tgt
2− a cos t, a sin t),
gdje je a > 0, oko svoje asimptote.
10. Pokazite da je jednoplosni hiperboloid dvostruko pravcasta ploha. Odredite familijepravaca.
11. Pokazite da je hiperbolicki paraboloid dvostruko pravcasta ploha. Odredite familijepravaca.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 52
3.2 Tangencijalna ravnina plohe
Reparametrizacija plohe
Sferu kao plohu ”pokrili” smo sa sest, odnosno sa dvije karte u Primjeru 2. Dakle, opcenito,neka tocka sfere lezat ce u slikama od vise karata. Proucimo stoga sto se dogada pripromjeni karte.
Neka su x : U → S ∩W , x : U → S ∩ W dvije karte i neka je p ∈ S ∩W ∩ W . Kako su x,x homeomorfizmi, to su V := x−1(S ∩W ∩ W ) ⊂ U i V := x−1(S ∩W ∩ W ) ⊂ U otvoreniskupovi u R2. Kompoziciju
θ := x−1 ◦ x : V → V
nazivamo funkcijom prijelaza s x na x. Vrijedi
x(u, v) = x(θ(u, v)) = x(u, v).
Teorem 3.2.1 Funkcije prijelaza izmedu karata regularne plohe su glatke.
Dokaz. Zelimo dokazati da je x−1 ◦ x glatko. To cemo preslikavanje prikazati kaokompoziciju (3.2.2) glatkih funkcija.
U tu svrhu, neka je tocka p ∈ S dana s p = x(u0, v0) = x(u0, v0). Kako je Jacobijevamatrica J preslikavanja x ranga 2, to postoji regularna minora od J reda 2. Neka je tominora (
xu xvyu yv
).
Definirajmo funkciju
F : U → R2, F (u, v) = (x(u, v), y(u, v)).
Prethodna regularna minora je matrica diferencijala funkcije F . Po Teoremu o inverz-nim funkcijama primijenjenom na funkciju F , postoji otvoren podskup W1 ⊂ R2 oko(u0, v0) ∈ U i otvoren podskup W2 ⊂ R2 oko F (u0, v0) takvi da je F : W1 → W2 glatkidifeomorfizam.Kako je preslikavanje x : W1 → x(W1) bijekcija, tada je i kompozicija F ◦x−1 bijekcija nax(W1). Uocimo da je
F ◦ x−1(x, y, z) = (x, y) = π(x, y, z),
gdje je π projekcija na prve dvije koordinate. Nadalje, ako stavimo W := x−1(x(W1)),tada je W otvoren podskup od U . Definirajmo
F : W → F (W )
F = π ◦ x.Vrijedi π = F ◦ x−1 = F ◦ x−1, te je
x−1 ◦ x = F−1 ◦ F . (3.2.2)
Preslikavanja F−1 i F su glatka, te je i njihova kompozicija glatko preslikavanje na W .Prema tome je i preslikavanje x−1 ◦ x glatko na otvorenom skupu koji sadrzi proizvoljnutocku (u0, v0).
Sljedeci je rezultat neka vrst obrata:

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 53
Propozicija 3.2.1 Neka su U i U otvoreni podskupovi od R2 i x : U → R3 regularnakarta plohe S. Neka je θ : U → U glatki difeomorfizam (glatka bijekcija s glatkim inver-zom). Tada je
x ◦ θ : U → R3
regularna karta plohe S.
Dokaz. Oznacimo x = x ◦ θ, (u, v) = θ(u, v). Preslikavanje x je homeomorfizam,kao kompozicija homeomorfizama, te je kao kompozicija glatkih preslikavanja i glatko.Nadalje, da bismo pokazali da je regularno, po lancanom pravilu imamo
xu =∂u
∂uxu +
∂v
∂uxv, xv =
∂u
∂vxu +
∂v
∂vxv. (3.2.3)
Prema tome je
xu × xv =
(∂u
∂u
∂v
∂v− ∂u
∂v
∂v
∂u
)xu × xv. (3.2.4)
Izraz u zagradi je determinanta Jacobijeve matrice preslikavanja θ koja je zbog pretpos-tavki razlicita od 0. Prema tome, uvjet xu × xv = 0 povlaci xu × xv = 0, tj. regularnostod x.
Definicija 3.2.2 Parametrizacija x : U → R3 je reparametrizacija od x : U → R3 akopostoji glatki difeomorfizam θ : U → U takav da je
x = x ◦ θ.
Glatke krivulje na plohi
U diferencijalnoj geometriji slijedimo vazan princip – (geometrijski) pojmovi koje defini-ramo na plohama ne smiju ovisiti o parametrizaciji, tj. ne smiju ovisiti o promjeni karte.Primjerice, jedan takav pojam je pojam glatke krivulje na plohi. U ovoj definiciji, krivu-lju ne promatramo polazno kao podskup ambijenta R3. Dakle, definiramo pojam glatkekrivulje kao glatkog preslikavanja kojemu kodomena nije otvoreni podskup od R3 negoploha. Krivulje na plohi pomazu u proucavanju ploha.
Definicija 3.2.3 Svako glatko preslikavanje c : I → S, I ⊂ R, nazivamo glatkom krivu-ljom na plohi. Pritom, za preslikavanje c : I → S kazemo da je glatko ako je preslikavanjex−1 ◦ c : I → U glatko, za neku kartu x : U → S, c(I) ⊂ x(U).
Zbog Teorema 3.2.1 pojam glatke krivulje na plohi je dobro definiran. Zaista, ako jey : V → S neka druga karta, c(I) ⊂ y(U), tada na njihovom presjeku vrijedi
y−1 ◦ c = y−1 ◦ x ◦ x−1 ◦ c,
te je y−1 ◦ c takoder glatko preslikavanje (kao kompozicija takvih).

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 54
Propozicija 3.2.2 Neka je c : I → S glatka krivulja takva da je c(I) ⊂ x(U) ⊂ S. Tadapostoje jedinstvene glatke funkcije u = u(t), v = v(t) : I → R takve da je
c(t) = x(u(t), v(t)). (3.2.5)
Dokaz. Promotrimo preslikavanje x−1 ◦ c : I → U . Ono je glatko preslikavanje, podefiniciji. Oznacimo sa u(t), v(t) koordinatne funkcije tog preslikavanja, x−1 ◦ c(t) =(u(t), v(t)). Te su funkcije glatke. Prema tome, vrijedi (3.2.5).
Jedinstvenost izlazi iz sljedeceg: ako su u = u(t), v = v(t) : I → R neke druge funkcije stim svojstvom, tada je(
u(t), v(t))= (x−1 ◦ c)(t) = (x−1 ◦ x)(u(t), v(t)) =
(u(t), v(t)
).
Definicija 3.2.4 Neka je x : U → x(U) ⊂ S lokalna parametrizacija plohe S i (u0, v0) ∈U . Krivulje
u 7→ x(u, v0), v 7→ x(u0, v)
nazivaju se parametarskim u i v-krivuljama.
Primjer 1.
1◦ Parametarske krivulje u karti plohe zadane su jednadzbama u = t, v = v0, odnosno,u = u0, v = t.
2◦ Obicna cilindricna spirala c(t) = (a cos t, a sin t, bt) na cilindru
x(u, v) = (a cosu, a sinu, bv)
moze se prikazati kao c(t) = x(t, t).
3◦ Vivijanijev prozor c(t) = (2 cos2 t, sin 2t, 2 sin t) na sferi
x(u, v) = (2 cosu cos v, 2 cosu sin v, 2 sin v)
moze se prikazati kao c(t) = x(t, t).

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 55
Tangencijalni vektor plohe. Tangencijalna ravnina
Definicija 3.2.5 Neka je S regularna ploha i p ∈ S. Tangencijalni vektor u tocki p jevektor vp ∈ TpR
3 za koji postoji krivulja c : I → S, takva da je
c(0) = p, c′(0) = vp.
Skup svih tangencijalnih vektora u p oznacavamo s TpS.
Primijetimo da bez smanjenja opcenitosti izabiremo parametar 0 ∈ I za koji vrijedi
c(0) = p, c′(0) = vp.
Teorem 3.2.6 Skup TpS je potprostor prostora TpR3 dimenzije 2.
Dokaz. Koristeci kriterij za potprostor, pokazimo najprije da za svaka dva vektoravp, wp ∈ TpS i svaka dva skalara α, β ∈ R vrijedi αvp + βwp ∈ TpS. Racun provodimo ukarti x. Zaista, kako su vp, wp ∈ TpS, to postoje krivulje c, c : I → S takve da je c(0) = p,c′(0) = vp, c(0) = p, c′(0) = wp. Zapisano pomocu karata
c(t) = x(u(t), v(t)), c(t) = x(u(t), v(t)),
c(0) = x(u(0), v(0)) = c(0) = x(u(0), v(0)) = x(u0, v0) = p,
vp = c′(0) = xu(u0, v0)u′(0) + xv(u0, v0)v
′(0),
wp = c′(0) = xu(u0, v0)u′(0) + xv(u0, v0)v
′(0).
Oznacimo ξ := αu′(0) + βu′(0), η := αv′(0) + βv′(0). Promotrimo krivulju d : I → S
d(t) = x(u0 + tξ, v0 + tη
).
Za nju vrijedid(0) = x(u0, v0) = p
d′(0) = ξxu(u0, v0) + ηxv(u0, v0)
= xu(u0, v0)(αu′(0) + βu′(0)
)+ xv(u0, v0)
(αv′(0) + βv′(0)
)= αvp + βwp.
Prema tome, αvp + βwp je tangencijalni vektor plohe S u tocki p.
Pokazimo jos da je {xu(u0, v0),xv(u0, v0)} baza za TpS.
Vec smo u prethodnom koraku pokazali da je navedeni skup skup izvodnica. Jos trebamoutvrditi da je linearno nezavisan, a ta cinjenica izlazi upravo iz uvjeta regularnosti ploheu tocki p.
Potprostor TpS se naziva tangencijalna ravnine plohe S u tocki p.
Zadatak 4. Izvedite jednadzbu tangencijalne ravnine plohe S lokalno parametrizirane sx : U → x(U) u tocki p = x(u0, v0).
Rjesenje. Tangencijalnu ravninu zadajemo parametarskom jednadzbom y:
y(u, v) = x(u0, v0) + uxu(u0, v0) + v xv(u0, v0), u, v,∈ R.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 56
Zadaci
1. Odredite jednadzbu tangencijalne ravnine
(i) elipsoida x2
4 + y2
16 + z2
18 = 1 u tocki (1,−2, 3).
(ii) helikoida x(u, v) = (u cos v, u sin v, 2v) u tocki x(2, π4 ).
2. Vektor v = (v1, v2, v3) je tangencijalni vektor plohe z = f(x, y) u tocki P =(p1, p2, p3) ako i samo ako je
v3 =∂f
∂x(p1, p2)v1 +
∂f
∂y(p1, p2)v2.
Dokazite.
3. Zadana je ploha x23 +y
23 +z
23 = a
23 , gdje je a > 0. Dokazite da zbroj kvadrata duljina
odsjecaka koje tangencijalna ravnina u tocki T (x0, y0, z0) odsijeca na koordinatnimosima ne ovisi o toj tocki.
4. Neka jeS = {(x, y, z) ∈ R3 : (x− 2)2 + yz + xz − y2 = 0}.
Dokazite da je S ploha. Dokazite da sve tocke plohe S u kojima je tangencijalnaravnina okomita na ravninu x− y − z = 5 leze u istoj ravnini.
5. Na primjeru jedinicne sfere i neke krivulje na njoj pokazite da se plosna normala inormala krivulje na plohi ne moraju podudarati.
3.3 Prva fundamentalna forma plohe
Definicija 3.3.1 Prva fundamentalna forma plohe S u tocki p ∈ S je simetrican, bili-nearan funkcional I : TpS × TpS → R definiran s
I(vp, wp) = vp · wp = v · w.
Pridruzenu kvadratnu formu I : TpS → R
I(vp) = vp · vp
takoder nazivamo prvom fundamentalnom formom.
Zapisimo prvu fundamentalnu formu u karti x : U → x(U) ⊂ S. Neka je vp ∈ TpS. Tadapostoji krivulja c : I → S takva da je c(0) = p, c′(0) = vp.
Neka je p = x(u0, v0). Krivulju c prikazujemo u karti
c(t) = x(u(t), v(t)),

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 57
te vrijedivp = c′(0) = xu(u0, v0)u
′(0) + xv(u0, v0)v′(0).
Dakle,
I(vp) = vp · vp = x2u(u0, v0)(u
′(0))2 + 2xu(u0, v0) · xv(u0, v0)u′(0)v′(0) + x2
v(u0, v0)(v′(0))2.
Definiramo funkcije E,F,G : U → R
E = x2u, F = xu · xv, G = x2
v.
Funkcije E,F,G nazivamo fundamentalnim velicinama prvog reda plohe S u karti x : U →R3.
Uocimo da pomocu I mjerimo duljinu luka krivulje na plohi S. Neka je c : I → S krivuljana plohi, c(I) ⊂ x(U). Sjetimo se da je duljina luka od c definirana je s
s(t) =
∫ t
t0
||c′(t)||dt.
Mozemo pisati
s(t) =
∫ t
t0
√I(c′(t))dt.
Ako je c(t) = x(u(t), v(t)), tada je
s(t) =
∫ t
t0
√Eu′(t)2 + 2Fu′(t)v′(t) +Gv′(t)2dt.
Prethodnu jednakost pisemo i u obliku
(ds
dt)2 = Eu′(t)2 + 2Fu′(t)v′(t) +Gv′(t)2,
odnosnods2 = Edu2 + 2Fdudv +Gdv2,
sto takoder nazivamo prvom fundamentalnom formom (ili metrickim tenzorom) plohe S.Koeficijente prve fundamentalne forme ponekad pisemo i kao E = g11, F = g12 = g21,G = g22, sto zapisujemo i matricno
(g) =
(E FF G
)=
(g11 g12g21 g22
).
Kao sto smo sad utvrdili, pomocu prve fundamentalne forme mozemo mjeriti duljinu lukakrivulja na plohi. Nadalje, mozemo odrediti kut medu krivuljama i racunati povrsinudijela plohe.
Neka su c, c : I → S dvije krivulje na plohi. Tada je kut medu njima u tocki njihovogpresjeka c(t0) = c(t0) jednak
cosφ =c′(t0) · c′(t0)
||c′(t0)|| ||c′(t0)||=

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 58
Eu′u′ + F (u′v′ + v′u′) +Gv′v′√Eu′2 + 2Fu′v′ +Gv′2
√Eu′2 + 2Fu′v′ +Gv′2
,
ako je c(t) = x(u(t), v(t)), c(t) = x(u(t), v(t)).
Posebno, kut izmedu parametarskih krivulja (njihovi tangencijalni vektori su xu i xv)jednak je
cosφ =F√EG
.
Primijetimo da je parametarska mreza ortogonalna ako i samo ako je F = 0.
Povrsina dijela plohe definirana je kao
P =
∫U
√EG− F 2dudv.
Primjer 1. Neka je ravnina zadana tockom p i dvama ortonormiranim vektorima a, b.Tada je
x(u, v) = p+ ua+ vb.
Prva fundamentalna forma ravnine u karti x je ds2 = du2 + dv2.
Primjer 2. Neka je zadan kruzni cilindar parametrizacijom
x(u, v) = (r cosu
r, r sin
u
r, v).
Prva fundamentalna forma cilindra u karti x je ds2 = du2 + dv2.
Primjer 3. Prva fundamentalna forma sfere radijusa r parametrizirane geografskomparametrizacijom x(u, v) = (r cos v cosu, r cos v sinu, r sin v), u ∈ ⟨0, 2π⟩, v ∈ ⟨−π
2 ,π2 ⟩, je
ds2 = r2(cos2 vdu2 + dv2).
1◦ Odredite duljinu ekvatora.
2◦ Odredite duljinu nekog meridijana.
3◦ Odredite povrsinu sfere.
Primjer 4. Prva fundamentalna forma torusa parametriziranog s (u, v ∈ ⟨0, 2π⟩)
x(u, v) = ((R+ r cosu) cos v, (R+ r cosu) sin v, r sinu)
je ds2 = r2du2 + (R+ r cosu)2dv2. Povrsina torusa je P = 4rRπ2.
Da bismo dokazali da duljina luka krivulje na plohi, kut izmedu krivulja i povrsina (dijela)plohe ne ovise o parametrizaciji, koristimo sljedecu propoziciju:
POGLAVLJE 3. LOKALNA TEORIJA PLOHA 59
Propozicija 3.3.1 Neka je x(u, v) reparametrizacija parametrizacije x(u, v) funkcijomθ(u, v) = (u, v) i neka su E, F , G, E,F,G pripadni koeficijenti prve fundamentalne forme.Neka je
J =
(∂u∂u
∂u∂v
∂v∂u
∂v∂v
)Jacobijeva matrica preslikavanja θ. Tada vrijedi(
E F
F G
)= J t
(E FF G
)J.
Uputa za dokaz.
Kako je x(u, v) = x(u, v), to je
∂x
∂u=
∂x
∂u
∂u
∂u+
∂x
∂v
∂v
∂u.
Zadaci
1. Pokazite da se velicine
(i) duljina luka krivulje na plohi,
(ii) povrsina dijela plohe
ne mijenjaju pri reparametrizaciji.(Uputa: Iz Propozicije (3.3.1) slijedi det I = (det J)2 det I. Povrsinu racunamo kaoP =
∫U
√I dudv i koristimo pravilo zamjene varijabli u integralu
∫U f(u, v) dudv =∫
U f(u, v)| det J |dudv, gdje je θ : U → U, θ(u, v) = (u, v) funkcija prijelaza.)
2. Ako za prvu fundamentalnu formu parametrizirane plohe x = x(u, v) vrijedi I =du2+dv2, tada kazemo da je parametrizacija x izometricna. Pokazite da je parame-trizacija kruznog cilindra x(u, v) = (r cos u
r , r sinur , v) izometricna.2
3. Ako za prvu fundamentalnu formu parametrizirane plohe x = x(u, v) vrijedi I =λ2(du2+dv2), λ = λ(u, v), tada kazemo da je parametrizacija x konformna. Pokaziteda je parametrizacija sfere stereografskim preslikavanjem konformna.3
4. Dokazite Propoziciju 3.3.1. (Uputa: Koristite izraze (3.2.3.))
2Uocite da su parametarske krivulje izometricne parametrizacije parametrizirane duljinom luka (E =G = 1), te da su medusobno okomite (F = 0). Proizvoljna se ploha ne moze parametrizirati (cak ni lokalno)izometricnom parametrizacijom, za razliku od krivulja koje se uvijek mogu parametrizirati duljinom luka.
3Moze se pokazati da je parametrizacija konformna ako i samo ako cuva mjeru kutova (iz R2). Takoder,moze se pokazati da se svaka ploha (lokalno) moze konformno parametrizirati.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 60
5. Neka je f : I → R glatka funkcija i neka je
x(u, v) = (u cos v, u sin v, f(u))
parametrizacija rotacijske plohe nastale rotacijom krivulje z = f(x) u xz-ravnini okoz-osi. Odredite sve funkcije f za koje je parametrizacija x konformna.
6. Odredite fundamentalne velicine prvog reda na rotacijskoj plohi
x(u, v) = (f(u) cos v, f(u) sin v, g(u)).
7. Na jedinicnoj sferi x(u, v) = (cosu sin v, sinu sin v, cos v) zadana je krivulja u =ln ctg t
2 , v = t, t ∈ [0, π2 ].
(i) Izracunajte njenu duljinu.
(ii) Dokazite da zadana krivulja zatvara konstantan kut s paralelama v = const. =v0.
8. Koristeci se fundamentalnim velicinama prvog reda izracunajte oplosje sfere polu-mjera R,
x(u, v) = (R cosu sin v,R sinu sin v,R cos v), u ∈ ⟨0, π⟩, v ∈ ⟨0, 2π⟩.
9. Na plohi A s parametrizacijom x : R2 → A, x(u, v) = (u sin v, u cos v, v), zadan jekrivolinijski trokut T s
T = {x(u, v) ∈ A : 0 ≤ u ≤ sh v, 0 ≤ v ≤ a},
gdje je a > 0 konstanta. Izracunajte povrsinu, duljine stranica i kuteve od T .
10. Odredite povrsinu ”cetverokuta” na helikoidu
x(u, v) = (au cos v, au sin v, bv), u, v ∈ R,
omedenog krivuljama u = 0, u = ba , v = 0, v = 1.
3.4 Operator oblika plohe
Neka je S regularna ploha i x : U → R3 karta koja pokriva podrucje x(U) plohe S.Pokazali smo da je tangencijalna ravnina TpS plohe S u tocki p ravnina razapeta vektorimaxu,xv. Prema tome, jedinicni vektor normale te ravnine je vektor
n =xu × xv
||xu × xv||.
Taj vektor nazivamo standardnim jedinicnim vektorom normale karte x.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 61
Ako je x : U → R3 druga karta, tada vrijedi (vidi (3.2.4))
xu × xv = det(J)xu × xv,
gdje je J Jacobijeva matrica funkcije prijelaza s x na x. Odavde je
n = ±n,
gdje je predznak ± je odreden predznakom determinante det(J).
Definicija 3.4.1 Kazemo da je ploha orijentabilna ako za svaku funkciju prijelaza izmedurazlicitih karata vrijedi det(J) > 0.
Propozicija 3.4.1 Za orijentabilnu plohu postoji standardni (kanonski) izbor jedninicnenormale u svakoj tocki. Dobivamo ga pomocu standardnog jedinicnog vektora normalekarata od S.
Na taj nacin na S se definira jedno glatko, jedinicno normalno polje. Plohu S nazivamoorijentiranom.
Primjer 1. Mobiusova traka je primjer plohe neorijentabilne plohe.
Neka je jedna karta dana s
x(u, v) = (cosu+ v cos(u
2) cosu, sinu+ v cos(
u
2) sinu, v sin(
u
2)),
s domenom U = {(u, v) ∈ R2 : v ∈ ⟨−1, 1⟩, u ∈ ⟨0, 2π⟩}. Tada je s obzirom na kartu x,duz tocaka sredisnje kruznice (v = 0) jedinicna normala dana s
n = (cosu sin(u
2), sinu sin(
u
2),− cos(
u
2)).
No, vrijedi limu→0 n = (0, 0,−1), limu→2π n = (0, 0, 1).
Propozicija 3.4.2 Neka je S regularna ploha zadana jednadzbom g(x, y, z) = a, gdje jeg : R3 → R glatka funkcija. Tada je ∇g jedno normalno polje koje ne iszezava niti ujednoj tocki od S.
Dokaz. Sjetimo se da je funkcijom g definirana regularna ploha ako je ∇g = 0 u svimtockama od S. Pokazimo jos da je ∇g normalan vektor plohe. Treba pokazati da je
∇g · vp = 0, vp ∈ TpS.
Kako je vp ∈ TpS, to postoji krivulja c : I → S, c(0) = p, c′(0) = vp. Nadalje, jer je ckrivulja plohe S vrijedi g(c(t)) = a. Deriviranjem dobivamo (koristimo lancano pravilo)
∂g
∂xc′1 +
∂g
∂yc′2 +
∂g
∂zc′3 = 0,
gdje su ci koordinatne funkcije krivulje c, c(t) = (c1(t), c2(t), c3(t)). U tocki t = 0 imamo
∇g(p) · vp = 0,
sto je i trebalo pokazati.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 62
Definicija 3.4.2 Neka je S regularna ploha parametrizirana s x : U → R3. Preslikavanje
n : U → S2, n(u, v) =xu × xv
||xu × xv||
nazivamo Gaussovim preslikavanjem.
Na orijentiranoj plohi Gaussovo preslikavanje je neprekidno (glatko) preslikavanje defini-rano na cijeloj plohi.
Primjer 2. Slika pri Gaussovom preslikavanju kruznog cilindra je (velika) kruznica naS2. Slika pri Gaussovom preslikavanju sfere S2 je sama sfera S2 (G = id).
Iduci nam je cilj prouciti promjenu jedinicnog normalnog polja plohe. Intuitivno nam jeprihvatljivo da su plohe kojima se jedinicno normalno polje ”brze mijenja” vise zakriv-ljene. Ravnina, primjerice, ima konstantno jedinicno normalno polje i reci cemo da nijezakrivljena ili da joj je zakrivljenost 0. Promjenu jedinicnog normalnog polja n promatratcemo pomocu usmjerene derivacije Dv polja n u smjeru nekog tangencijalnog vektora v.
U daljnjem promatramo orijentirane plohe S s odabranim jedinicnim normalnim poljemn.
Definicija 3.4.3 Preslikavanje Sp : TpS → TpR3 definirano s
Sp(vp) = −Dvpn(p)
nazivamo operatorom oblika plohe S u tocki p (ili Weingartenovim preslikavanjem).
Sjetimo se definicije usmjerene derivacije. Neka je f : U → R, U ⊂ R3 otvoren, glatkafunkcija. Neka su p, v ∈ R3. Usmjerena derivacija funkcije f u smjeru vektora v u tocki pje realan broj 4
Dvf(p) =( ddtf(p+ tv)
)(0)
Koristenjem lancanog pravila dobivamo
Dvf(p) = (∇f)(p) · v
gdje je (∇f)(p) =(
∂f∂x1
(p), . . . , ∂f∂xn
(p))gradijent funkcije f u tocki p. Uvjerite se da je
usmjerena derivacija funkcije f u smjeru koordinatnih jedinicnih vektora jednaka odgova-rajucoj parcijalnoj derivaciji.
Ako je W glatka vektorska funkcija W : U → R3, U ⊂ R3 otvoren, tada usmjerenuderivaciju DvW od W u smjeru vektora v ∈ R3 u tocki p definiramo kao vektor ∈ R3
DvW (p) =( ddtW (p+ tv)
)(0).
4Neki autori (a ne svi!) kod definicije usmjerene derivacije zahtjevaju da je v jedinicni vektor.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 63
Neka su wi : R3 → R koordinatne funkcije od W , W = (w1, w2, w3). Tada je
DvW (p) =(Dvw1(p), Dvw2(p), Dvw3(p)
),
odnosno vrijedi
DvW (p) =(∇w1(p) · v,∇w2(p) · v,∇w3(p) · v
)= D(W )(p)v,
gdje je D(W )(p)v diferencijal funkcije W u tocki p primijenjen na vektor v.
Neka je sada S ploha, p ∈ S, vp ∈ TpS. Promatrajmo glatke funkcije na plohi S, f :S → R. Funkcija f : S → R je glatka ako je za neku (a tada i za svaku) parametrizacijux : U → S, funkcija f ◦ x : U → R, kao funkcija izmedu otvorenih skupova iz R2 i R,glatka. Usmjerenu derivaciju Dvf od f u smjeru vektora v u tocki p definiramo kao realanbroj
Dvf(p) =( ddtf(c(t))
)(0)
gdje je c : I → S krivulja na plohi S za koju je c(0) = p, c′(0) = vp.
Primijetimo da smo pravac u definiciji usmjerene derivacije realne funkcije definirane naR3 zamijenili krivuljom na plohi s istim pocetnim uvjetima!
Pomocu lancanog pravila, moze se pokazati da vrijedi
Dvf(p) = ∇f(p) · v.
Dakle, definicija usmjerene derivacije ne ovisi o izboru krivulje c.
Analogno definiramo i usmjerenu derivaciju vektorskog polja W definiranog za tocke ploheS, W : p 7→ W (p) ∈ TpR
3. Usmjerena derivaciju DvW od W u smjeru vektora v u tockip je vektor ∈ TpR
3 definiran s
DvW (p) =( ddtW (c(t))(0)
)p
(3.4.6)
gdje je c : I → S krivulja na plohi S za koju je c(0) = p, c′(0) = vp.
Kao i prije, imamo
DvW (p) =(Dvw1(p), Dvw2(p), Dvw3(p)
)p= (D(W )(p)v)p,
gdje su wi koordinatne funkcije polja W .
Primijetimo da ne mora biti DvW ∈ TpS cak ni za tangencijalna polja W plohe, W : p 7→W (p) ∈ TpS!
Propozicija 3.4.3 (a) Operator oblika plohe Sp je linearan operator, p ∈ S.
(b) Sp(v) ∈ TpS, v ∈ TpS.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 64
Dokaz.
(a) Linearnost je ocita - usmjerena derivacija definirana je djelovanjem diferencijala, aon je linearni operator.
(b) Treba dokazati Sp(v) · n(p) = 0, za svaku tocku p ∈ S.
Uocimo n(p) · n(p) = 1, p ∈ S. Dakle, funkcija n · n : S → R
p 7→ n(p) · n(p)
je konstantna funkcija. Stoga je
Dv(n · n)(p) = Dv(1) = 0.
Nadalje, da bismo odredili usmjerenu derivaciju od n ·n koristimo Leibnizovo pravilo(zasto?)
Dv(n · n)(p) = Dvn(p) · n(p) + n(p) ·Dvn(p).
Iz svega prethodnog slijedi2Dvn(p) · n(p) = 0,
odnosno Sp(v) · n(p) = 0, sto je i trebalo pokazati.
Zbog prethodne propozicije, operator oblika plohe promatrat cemo kao linearni operator
Sp : TpS → TpS.
Uocimo i sljedece svojstvo operatora oblika plohe:
Propozicija 3.4.4 Neka je c : I → S krivulja na plohi S i nc restrikcija normalnog poljan na tocke krivulje c, nc := n|c(I), tj. nc(t) = (n ◦ c)(t) = n(c(t)). Tada je
Sc(0)(c′(0)) = −n′
c(0).
Dokaz. Koristeci definiciju usmjerene derivacije (3.4.6) imamo
Sc(0)(c′(0)) = −Dc′(0)n = −
(d
dtn(c(t))(0)
)c(0)
=
−(
d
dt(nc(t))(0)
)c(0)
= −n′c(0).
Primjer 1. Neka je S ravnina. Tada je
Sp(vp) = 0, vp ∈ TpS,

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 65
jer je n konstantno polje. Dakle, operator oblika ravnine je nul-operator.
Primjer 2. Neka je S kruzni cilindar, x2 + y2 = r2. Tada je
n =∇g
||∇g||,
gdje je g(x, y, z) = x2 + y2. Dakle, n(x, y, z) = 1r (x, y, 0).
Uocimo dva istaknuta tangencijalna vektora e1 = (−y, x, 0) i e2 = (0, 0, 1). Tada je
Sp(e1) = −De1n = −(∇(x
r) · e1,∇(
y
r) · e1, 0) =
−((1
r, 0, 0) · e1, (0,
1
r, 0) · e1, 0) = −1
r(−y, x, 0) = −1
re1,
Sp(e2) = (0, 0, 0) = 0 · e2.Matrica od Sp u bazi {e1, e2} od TpS dana je sa(
−1r 00 0
).
Primjer 3. Neka je S sfera, x2 + y2 + z2 = r2. Jedinicno normalno polje (prema vanorijentirano) je
n(x, y, z) =1
r(x, y, z).
Neka je v ∈ TpS po volji odabrani tangencijalni vektor. Tada je
Sp(v) = −(∇(x
r) · v,∇(
y
r) · v,∇(
z
r) · v) =
−1
r(v1, v2, v3) = −1
rv.
Dakle, operator oblika sfere je tzv. skalarni operator Sp = −1r I, gdje je I jedinicni operator.
3.5 Gaussova i srednja zakrivljenost. Drugafundamentalna forma
Neka je S (orijentirana) ploha i neka je Sp : TpS → TpS operator oblika plohe od S.
Definicija 3.5.1 Gaussova zakrivljenost plohe S u tocki p je funkcija K : S → R defini-rana s
K(p) = detSp.
Srednja zakrivljenost plohe S u tocki p je funkcija H : S → R definirana s
H(p) =1
2trSp.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 66
Pokazali smo da je operator oblika plohe linearan operator, a pokazat cemo i da je sime-trican tj. da za njega vrijedi
Sp(v) · w = v · Sp(w), v, w ∈ TpS.
Kako je Sp simetrican operator, to postoji ortonormirana baza od TpS u kojoj je njegovmatricni prikaz dijagonalna matrica. Oznacimo tu bazu s {e1, e2}. Tada vrijedi
Sp(e1) = k1(p)e1, Sp(e2) = k2(p)e2,
Sp =
(k1(p) 00 k2(p)
).
Svojstvene vrijednosti k1(p), k2(p) operatora Sp nazivamo glavnim zakrivljenostima ploheS u tocki p, a vektore e1, e2 (jedinicnim) glavnim vektorima.
Sada je
K(p) = k1(p)k2(p), H(p) =1
2(k1(p) + k2(p)).
Takoder znamo i da su glavne zakrivljenosti k1, k2 kao svojstvene vrijednosti operatoraoblika plohe Sp nultocke karakteristicnog polinoma
k(λ) = λ2 − (k1 + k2)λ+ k1k2
= λ2 − 2H(p)λ+K(p).
Imamo i sljedece veze
k1,2 = H ±√
H2 −K
H2 −K =(k1 − k2)
2
4.
Zamjena normalnog polja n plohe S poljem −n ima za posljedicu da glavne zakrivlje-nosti k1, k2 mijenjaju predznak. No, Gaussova zakrivljenost K ne mijenja predznak, papredznak Gaussove zakrivljenosti daje informaciju o tockama plohe. Uvodimo sljedecuklasifikciju tocaka plohe:
1◦ Za tocku p ∈ S kazemo da je elipticka ako je K(p) > 0. U toj su tocki glavnezakrivljenosti k1, k2 istog predznaka. Primjer takve tocke je svaka tocka elipsoida.
Specijalno, tocke plohe za koje je k1 = k2 nazivamo pupcastima. Za njih je H2 = K.To su sve tocke sfere.5
2◦ Za tocku p ∈ S kazemo da je hiperbolicka ako je K(p) < 0. Glavne zakrivljenostik1, k2 su razlicitih predznaka. Primjer takve tocke je svaka tocka jednoplosnog hi-perboloida i helikoida. 6
5Vrijedi sljedeca tvrdnja: Povezana, regularna ploha S koja se sastoji samo od umbilickih tocaka je ilidio ravnine ili dio sfere.
6Posebno, tocka plohe koja je graf glatke funkcije f je sedlasta, ako je stacionarna za f , ali nije esktrem– to je ako i samo ako je Hessian of f indefinitan. Takva tocka postoji na hiperbolickom paraboloidu.
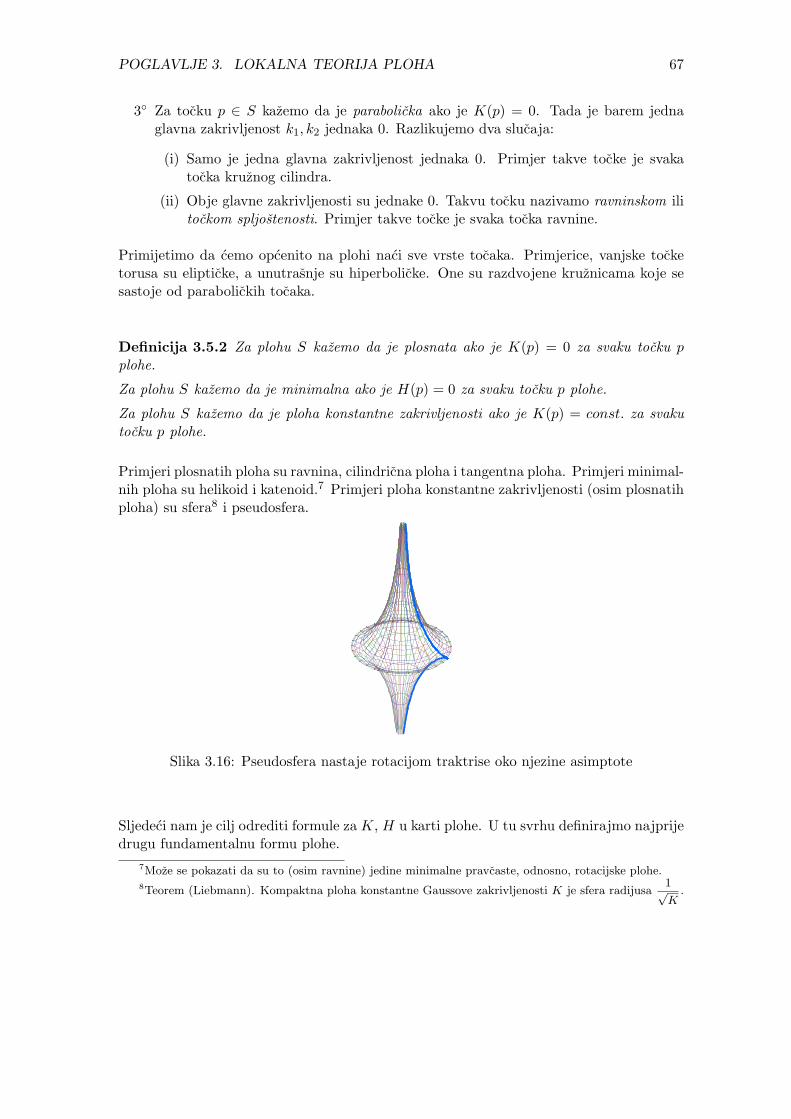
POGLAVLJE 3. LOKALNA TEORIJA PLOHA 67
3◦ Za tocku p ∈ S kazemo da je parabolicka ako je K(p) = 0. Tada je barem jednaglavna zakrivljenost k1, k2 jednaka 0. Razlikujemo dva slucaja:
(i) Samo je jedna glavna zakrivljenost jednaka 0. Primjer takve tocke je svakatocka kruznog cilindra.
(ii) Obje glavne zakrivljenosti su jednake 0. Takvu tocku nazivamo ravninskom ilitockom spljostenosti. Primjer takve tocke je svaka tocka ravnine.
Primijetimo da cemo opcenito na plohi naci sve vrste tocaka. Primjerice, vanjske tocketorusa su elipticke, a unutrasnje su hiperbolicke. One su razdvojene kruznicama koje sesastoje od parabolickih tocaka.
Definicija 3.5.2 Za plohu S kazemo da je plosnata ako je K(p) = 0 za svaku tocku pplohe.
Za plohu S kazemo da je minimalna ako je H(p) = 0 za svaku tocku p plohe.
Za plohu S kazemo da je ploha konstantne zakrivljenosti ako je K(p) = const. za svakutocku p plohe.
Primjeri plosnatih ploha su ravnina, cilindricna ploha i tangentna ploha. Primjeri minimal-nih ploha su helikoid i katenoid.7 Primjeri ploha konstantne zakrivljenosti (osim plosnatihploha) su sfera8 i pseudosfera.
Slika 3.16: Pseudosfera nastaje rotacijom traktrise oko njezine asimptote
Sljedeci nam je cilj odrediti formule za K, H u karti plohe. U tu svrhu definirajmo najprijedrugu fundamentalnu formu plohe.
7Moze se pokazati da su to (osim ravnine) jedine minimalne pravcaste, odnosno, rotacijske plohe.8Teorem (Liebmann). Kompaktna ploha konstantne Gaussove zakrivljenosti K je sfera radijusa
1√K
.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 68
Definicija 3.5.3 Druga fundamentalna forma plohe S u tocki p ∈ S je simetrican, bili-nearan funkcional II : TpS × TpS → R definiran s
II(vp, wp) = Sp(vp) · wp.
Pridruzena kvadratna forma II : TpS → R
II(vp) = Sp(vp) · vp
takoder se naziva drugom fundamentalnom formom.
Zapisimo drugu fundamentalnu formu u karti x : U → R3. Neka je vp ∈ TpS. Tada postojikrivulja c : I → S takva da je c(0) = p, c′(0) = vp.
Neka je p = x(u0, v0). Krivulju c prikazujemo u karti kao
c(t) = x(u(t), v(t)),
Znamo da vrijedivp = c′(0) = xu(u0, v0)u
′(0) + xv(u0, v0)v′(0).
Dakle,II(vp) = S(vp) · vp
= Sp(xu(u0, v0)) · xu(u0, v0)(u′(0))2 + Sp(xu(u0, v0)) · xv(u0, v0)u
′(0)v′(0)
+xu(u0, v0) · Sp(xv(u0, v0))u′(0)v′(0) + Sp(xv(u0, v0)) · xv(u0, v0)(v
′(0))2.
Definiramo funkcije L,M,N : U → R
L = Sp(xu(u0, v0)) · xu(u0, v0),
M = Sp(xu(u0, v0)) · xv(u0, v0) = xu(u0, v0) · Sp(xv(u0, v0)),
N = Sp(xu(u0, v0)) · xu(u0, v0).
Funkcije L,M,N nazivamo fundamentalnim velicinama drugog reda plohe S u karti x.Prema tome, mozemo pisati
II(vp) = Lu′(0)2 + 2Mu′(0)v′(0) +Nv′(0)2
iliII(vp) = Ldu2 + 2Mdudv +Ndv2.
Propozicija 3.5.1 Neka je x : U → R3 karta za plohu S, E,F,G,L,M,N fundamen-talne velicine prvog i drugog reda s obzirom na kartu x. Tada su Gaussova i srednjazakrivljenost dane formulama
K =LN −M2
EG− F 2,
H =EN − 2FM +GL
2(EG− F 2).

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 69
Dokaz. Neka je TpS tangencijalna ravnina plohe S u tocki p, a vektori xu,xv linearonezavisni vektori koji razapinju TpS. Tada postoji rastav
Sp(xu) = λ1xu + λ2xv
Sp(xv) = µ1xu + µ2xv.
Odavde slijedi da je matrica operatora Sp u paru baza {xu,xv} dana s
Sp =
(λ1 µ1
λ2 µ2
).
Dakle,K(p) = detSp = λ1µ2 − λ2µ1,
H(p) =1
2trSp =
1
2(λ1 + µ2).
Uocimo da vrijediSp(xu)× Sp(xv) = K(p) (xu × xv) (3.5.7)
iSp(xu)× xv + xu × Sp(xv) = 2H(p) (xu × xv) . (3.5.8)
Pomnozimo sad jednakosti (3.5.7), (3.5.8) skalarno s xu×xv i iskoristimo sljedeci identitetkoji vrijedi za svaka cetiri vektora a, b, c, d
(a× b) · (c× d) =
∣∣∣∣ a · c a · db · c b · d
∣∣∣∣ .Dobivamo ∣∣∣∣ Sp(xu) · xu Sp(xu) · xv
Sp(xv) · xu Sp(xv) · xv
∣∣∣∣ = K(p)
∣∣∣∣ xu · xu xu · xv
xv · xu xv · xv
∣∣∣∣ ,odnosno∣∣∣∣ Sp(xu) · xu Sp(xu) · xv
xv · xu xv · xv
∣∣∣∣+ ∣∣∣∣ xu · xu xu · xv
Sp(xv) · xu Sp(xv) · xv
∣∣∣∣ = 2H(p)
∣∣∣∣ xu · xu xu · xv
xv · xu xv · xv
∣∣∣∣ .Prema tome je
K(p) =
∣∣∣∣ Sp(xu) · xu Sp(xu) · xv
Sp(xv) · xu Sp(xv) · xv
∣∣∣∣∣∣∣∣ xu · xu xu · xv
xv · xu xv · xv
∣∣∣∣ ,
H(p) =
∣∣∣∣ Sp(xu) · xu Sp(xu) · xv
xv · xu xv · xv
∣∣∣∣+ ∣∣∣∣ xu · xu xu · xv
Sp(xv) · xu Sp(xv) · xv
∣∣∣∣2
∣∣∣∣ xu · xu xu · xv
xv · xu xv · xv
∣∣∣∣ .
Uvrstavanjem fundamentalnih velicina E,F,G,L,M,N dobivamo trazene izraze za K iH.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 70
Napomena. Izraz
W 2 := EG− F 2 =
∣∣∣∣ xu · xu xu · xv
xv · xu xv · xv
∣∣∣∣nazivamo Weingartenova funkcija. Iz uvjeta regularnosti slijedi da je W u svakoj tockiplohe razlicito od 0.
Izvedene formule postat ce operativnije ako uvedemo operativnije izraze za fundamentalnevelicine drugog reda. Oni su dani sljedecom propozicijom.
Propozicija 3.5.2 Neka je x : U → S karta. Tada vrijedi
L = n · xuu =1
Wdet(xuu,xu,xv) (3.5.9)
M = n · xuv =1
Wdet(xuv,xu,xv) (3.5.10)
N = n · xvv =1
Wdet(xvv,xu,xv) (3.5.11)
gdje je n standardno jedinicno normalno polje od S, n = xu×xv||xu×xv || .
Dokaz. Dokazimo radi ilustracije drugu od tih formula. Kako je
n · xu = 0,
to je ∂∂v (n · xu) = 0, dakle,
nv · xu + n · xuv = 0.
Iz Propozicije 3.4.4 slijediS(xv) = −nv,
sto povlaciS(xv) · xu = n · xuv = M.
Analogno se dobiju ostale formule.
Propozicija 3.5.3 Operator oblika plohe simetrican tj. vrijedi
Sp(v) · w = v · Sp(w), v, w ∈ TpS.
Dokaz. Kako je
Sp(xu) · xv = n · xvu = n · xuv = Sp(xv) · xu = xu · Sp(xv),
i kako vektori xu,xv cine bazu za TpS, to tvrdnja slijedi.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 71
Primjer. Gaussova i srednja zakrivljenost helikoida.
Jedna karta na helikoidu je dana s x : R× ⟨0, 2π⟩ → S
x(u, v) = (u cos v, u sin v, bv), b = 0.
Tada jexu(u, v) = (cos v, sin v, 0), xv = (−u sin v, u cos v, b).
Dakle E = 1, F = 0, G = u2 + b2. Dalje imamo
xuu = (0, 0, 0), xuv = (− sin v, cos v, 0), xvv = (−u cos v,−u sin v, 0).
Prema tome je L = 0, M = − b√u2 + b2
, N = 0, odakle slijedi
K = − b2
(u2 + b2)2< 0, H = 0.
Odavde slijedi da su sve tocke helikoida hiperbolicke i da je helikoid minimalna ploha.Moze se pokazati da je (osim ravnine) jedina minimalna pravcasta ploha.
Geometrijska interpretacija Gaussove zakrivljenosti. Propozicija 3.4.4 i jednakost(3.5.7) povlace da je
nu × nv = K(p)(xu × xv)
sto povlaci
|K(p)| = ||nu × nv||||xu × xv||
.
Izrazom dP := ||xu × xv|| odreden je diferencijal povrsine dijela plohe. Slicno mozemoshvatiti i izraz dP (n) := ||nu × nv|| kao diferencijal povrsine dijela sfere (koristeci inter-pretaciju preslikavanja (u, v) 7→ n(u, v) kao Gaussovog preslikavanja).
Propozicija 3.5.4 Neka je x(u, v) reparametrizacija od x(u, v) funkcijom θ i neka suL, M , N , L,M,N pripadni koeficijenti druge fundamentalne forme. Neka je
J =
(∂u∂u
∂u∂v
∂v∂u
∂v∂v
)Jacobijeva matrica preslikavanja θ(u, v) = (u, v). Tada vrijedi(
L M
M N
)= ±J t
(L MM N
)J,
pri cemu je predznak ± jednak predznaku od det J .

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 72
Zadaci
1. Neka je A : V → V linearni operator na vektorskom prostoru V , A(e) njegov matricniprikaz u bazi (e) od V . Determinantu i trag linearnog operatora A definiramo kaodeterminantu i trag njegovog matricnog prikaza A(e),
detA := detA(e), trA := trA(e).
Pokazite da su determinanta i trag linearnog operatora dobro definirani pojmovi,tj. da ne ovise o izboru matricnog prikaza.
2. Izracunajte Gaussovu i srednju zakrivljenost u proizvoljnoj tocki, te odredite vrstutocaka
(i) sfere,
(ii) helikoida i katenoida,
(iii) pseudosfere,
(iv) grafa funkcije z = f(x, y).
3. Za tocku plohe definirane kao graf funkcije z = f(x, y) kazemo da je sedlasta akoje to stacionarna tocka koja nije lokalni ekstrem (to je ako i samo ako je Hessianfunkcije f indefinitan). Odredite sedlaste tocke hiperbolickog paraboloida.
4. Neka je x(u, v) = (f(u) cos v, f(u) sin v, g(u)) parametrizacija rotacijske plohe S nas-tale rotacijom krivulje (parametrizirane duljinom luka) (f(u), 0, g(u)) oko z-osi.
(i) Odredite Gaussovu i srednju zakrivljenost od S.
(ii) Odredite funkcije f > 0, g tako da je S ploha konstantne zakrivljenosti.
(iii) Pokazite ako je f(u) = eu, g(u) =√1− e2u − Arch(e−u), da je S ploha kons-
tantne negativne zakrivljenosti (pseudosfera). Odredite njezinu prvu funda-mentalnu formu. Ako definiramo novi parametar w kao w = e−u, pokazite daje tada prva fundamentalna forma
ds2 =dv2 + dw2
w2.
5. Koristeci Propoziciju 3.5.4 pokazite da za Gaussovu zakrivljenost parametrizacijex(u, v) i reparametrizacije x(u, v) vrijedi
K(u, v) = K(u, v),
tj. Gaussova zakrivljenost plohe u tocki p ne ovisi o parametrizaciji. Analogno vrijediza srednju zakrivljenost.
6. Dokazite da je tocka (0, 0, 0) tocka spljostenosti (k1 = k2 = 0) na majmunskom sedluz = x3 − 3xy2.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 73
7. Pokazite da je katenoid x(u, v) = (chu cos v, chu sin v, u), u ∈ R, v ∈ [0, 2π], mini-malna ploha.
8. Dokazite da vrijedi H2 ≥ K. Kada vrijedi jednakost?
9. Zadana je rotacijska ploha
x(u, v) = (u, f(u) cos v, f(u) sin v),
pri cemu je f > 0. Odredite sve funkcije f takve da ploha bude minimalna.
10. Dokazite da je z = f(x, y), gdje je f glatka funkcija, minimalna ploha ako i samoako vrijedi
(1 + f2y )fxx − 2fxfyfxy + (1 + f2
x)fyy = 0.
3.6 Normalna zakrivljenost
U ovom je poglavlju cilj prouciti zakrivljenost krivulja na plohi. Zakrivljenost plohe ocitoutjece na oblik krivulja na plohi. Dokazimo najprije tvrdnju:
Propozicija 3.6.1 Neka je c : I → S krivulja na plohi S. Tada vrijedi
c′′ · nc = S(c′) · c′,
gdje je nc = n ◦ c restrikcija jedinicnog normalnog polja na c(I).
Dokaz. Kako je c krivulja na S, to u proizvoljnoj tocki krivulje vrijedi
c′ · nc = 0.
Deriviranjem po parametru krivulje dobivamo
c′′ · nc + c′ · n′c = 0.
Propozicija 3.4.4 povlaci S(c′) = −n′c, te je
c′′ · nc = −c′ · n′c = S(c′) · c′.
Napomena. Iz prethodne propozicije slijedi da sve krivulje koje prolaze istom tockomplohe i u toj tocki imaju isti tangencijalni vektor, imaju u toj tocki i istu komponentuvektora c′′ u smjeru normalnog jedinicnog vektora n, tj.
c′′ · nc = konst.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 74
Definicija 3.6.1 Normalna zakrivljenost plohe S u tocki p u smjeru tangencijalnog vek-tora vp je realan broj
k(vp) =Sp(vp) · vpvp · vp
.
Uocimo da ako su vektori vp, wp kolinearni, da su normalne zakrivljensti plohe u smjerutih vektora jednake. Zaista, ako je vp = λwp, tada je
k(wp) =Sp(wp) · wp
wp · wp=
Sp(λvp) · λvpλvp · λvp
=λ2Sp(vp) · vpλ2vp · vp
= k(vp).
Stoga govorimo o normalnoj zakrivljenosti plohe ”u smjeru”, pri cemu pod smjerom po-drazumijevamo jednodimenzionalni potprostor tangencijalne ravnine generiran nekim vek-torom vp.
Sljedeca propozicija povezuje informacije o krivulji sa cinjenicom da krivulja lezi na nekojplohi.
Propozicija 3.6.2 Sve krivulje plohe S koje prolaze jednom tockom plohe i imaju u tojtocki isti tangencijalni vektor i isti vektor glavne normale (tj. istu oskulacijsku ravninu),imaju u toj tocki istu fleksiju.
Dokaz. Neka je vp ∈ TpS jedinicni vektor. Po definiciji tangencijalnog vektora plohe,postoji krivulja c : I → S za koju vrijedi
c(0) = p, c′(0) = vp.
Time smo bez smanjenja opcenitosti pretpostavili da je c parametrizirana duljinom luka.Znamo
c′′(s) = κ(s)N(s),
gdje je N polje glavnih normala od c. Za normalnu zakrivljenost u tocki p u smjeru vpkoristeci Propoziciju 3.6.1 dobivamo
k(vp) = S(vp) · vp = S(c′(0)) · c′(0) = c′′(0) · n(p) = κ(0)N(0) · n(p).
Neka u tocki p vektor glavne normale krivulje N(0) i vektor normale plohe n(p) zatvarajukut φ. Tada je
N(0) · n(p) = cosφ,
odakle jek(vp) = κ(0) cosφ,
Stoga je
κ(0) =k(vp)
cosφ.
Desna strana prethodne jednakosti je uvijek ista za sve krivulje c s istim tangencijalnimvektorom i vektorom glavne normale. Dakle, tvrdnja slijedi.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 75
Od posebnog su interesa krivulje na plohi kojima se vektor glavne normale krivulje N(0)podudara (do na orijentaciju) s vektorom normale plohe n(p)
N(0) = ±n(p).
Za fleksiju takvih krivulja vrijedi
κ(0) = ±k(vp).
Uocimo da se takvim krivuljama oskulacijska ravnina podudara s ravninom razapetom sazadanim tangencijalnim vektorom vp i plosnom normalom n(p).
Konstruirajmo jednu specijalnu takvu krivulju. Presjecimo plohu S ravninom π odredenomsa zadanim tangencijalnim vektorom vp i plosnom normalom n(p). Takvu krivulju nazi-vamo normalnim presjekom plohe S u tocki p u smjeru vp. Ocito je ta krivulja ravninska,pa joj je ravnina π oskulacijska. Po prethodnim razmatranjima, za takvu krivulju vrijedi
κ(0) = ±k(vp).
Dakle, dokazali smo sljedecu propoziciju:
Propozicija 3.6.3 (Geometrijska interpretacija normalne zakrivljenosti) Normal-na zakrivljenost od S u p u smjeru vp jednaka je, do na predznak, fleksiji normalnogpresjeka plohe S u p u smjeru vektora vp.
Sjetimo se sad linearne algebre. Neka je A : V → V simetricni operator na (realnom,n-dimenzionalnom) vektorskom prostoru V . Njemu mozemo pridruziti preslikavanje B :V × V → R
B(v, w) = Av · w.Preslikavanje B je bilinearan (linearan u svakoj varijabli) funkcional. Preslikavanje B je isimetricno preslikavanje, u smislu da vrijedi
B(v, w) = B(w, v).
Zaista, zbog simetricnosti operatora A i komutativnosti skalarnog produkta slijedi
B(v, w) = Av · w = v ·Aw = Aw · v = B(w, v).
Obratno, ako je zadan simetrican, bilinearan funkcional B : V × V → R, tada mozemodefinirati simetrican operator A : V → V tako da je Av · w = B(v, w). Zaista, operatorA zadan je svojim djelovanjem na (ortonormiranoj) bazi (e1, . . . , en), te stavimo A(ei) =∑
j ajiej . Skalari aji odredeni su sa aji = A(ei) · ej = B(ei, ej).
Nadalje, svakom simetricnom, bilinearnom funkcionalu mozemo pridruziti kvadratnu formu
Q(v) = B(v, v).
Vrijedi i obratno, ako imamo kvadratni formu Q, tada njoj mozemo pridruziti simetrican,bilinearan funkcional
B(v, w) =1
2(Q(v + w)−Q(v)−Q(w)) .
Prema tome, postoji injektivna veza izmedu kvadratnih formi i simetricnih operatora naV .
POGLAVLJE 3. LOKALNA TEORIJA PLOHA 76
Propozicija 3.6.4 Neka je V dvodimenzionalan realan vektorski prostor i A : V → Vsimetrican operator. Tada postoji ortonormirana baza za V u kojoj operator A ima dija-gonalan matricni prikaz. Pritom su svojstvene vrijednosti operatora A minimum i maksi-mum kvadratne forme Q(v) = Av · v na jedinicnoj kruznici ||v|| = 1 i obratno.
Dokaz. Simetricni operator ima realne svojstvene vrijednosti, te se moze dijagonaliziratii na realnom vektorskom prostoru.
Nadalje, neka je Q(v) = Av · v kvadratna forma pridruzena simetricnom operatoru A.Uocimo da je preslikavanje Q : V → R neprekidno te stoga postize svoj maksimum iminimum na jedinicnoj kruznici (kompaktu) {v ∈ V : ||v|| = 1}.Neka je (e1, e2) ortonormirana baza u kojoj se A dijagonalizira i neka su λ1, λ2 pripadnesvojstvene vrijednosti, Aei = λiei, i = 1, 2. Tada za v ∈ V , v = v1e1 + v2e2, imamoQ(v) = v21λ1 + v22λ2. Neka je bez smanjenja opcenitosti λ1 ≥ λ2. Tada slijedi Q(v) ≥ λ2,Q(v) ≤ λ1, za svaki ||v|| = 1.
Obratno, neka je λ1 maksimum od Q na jedinicnoj kruznici {v ∈ V : ||v|| = 1} i neka seon postize za vektor e1, Q(e1) = λ1e1. Neka je e2 ∈ V , e2 · e1 = 0, ||e2|| = 1. StavimoQ(e2) = λ2e2. Pokazimo da su λ1, λ2 svojstvene vrijednosti opratora A. Neka je (aij)simetricna matrica operatora A u bazi {e1, e2}. Ocito je λ1 = a11, λ2 = a22, te djelovanjeoperatora A mozemo zapisati kao
Ae1 = λ1e1 + a12e2,Ae2 = a12e1 + λ2e2.
(3.6.12)
Za jedinicni vektor v(α) = cosαe1 + sinαe2 definiramo funkciju Q(α) = Q(v(α)). Tada je
Q(α) = A(v(α)) · v(α) = λ1 cos2 α+ 2 (A(e1) · e2) cosα sinα+ λ2 sin
2 α.
Kako je e1 = v(0) vektor na kojem Q postize maksimum, to je
dQ(α)
dα(0) = 0. (3.6.13)
S druge strane je
dQ(α)
dα= 2 (A(e2) · e2 −A(e1) · e1) cosα sinα+ 2(A(e1) · e2)(cos2 α− sin2 α).
Sad (3.6.13) povlaci A(e1) · e2 = 0. Prema tome, u (3.6.12) a12 = 0, te su e1, e2 svojstvenivektori od A. Nadalje, vektor e2 = v(π2 ) je takoder stacionarna tocka, dakle minimum, zaQ.
Primijenimo sad sve navedeno na operator oblika plohe Sp : TpS → TpS i kvadratnu formu(normalnu zakrivljenost) k(vp) = Sp(vp) · vp, ||vp|| = 1. Zakljucujemo:
Korolar 3.6.1 Glavne zakrivljenosti k1, k2 su kao svojstvene vrijednosti operatora oblikaplohe minimum i maksimum normalne zakrivljenosti i obratno.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 77
Iz toga, primjerice, slijedi sljedece:
1◦ U eliptickoj tocki plohe, normalna zakrivljenost je u svakom smjeru uvijek istogpredznaka.
2◦ U hiperbolickoj tocki, kako je normalna zakrivljenost neprekidna funkcija, postojismjer vp za koji je k(vp) = 0.
Teorem 3.6.2 (Eulerov teorem) Neka su e1, e2 jedinicni glavni vektori plohe S u tockip i neka je
vp = cosα e1 + sinα e2
po volji odabrani jedinicni tangencijalni vektor u p. Tada je
k(vp) = k1 cos2 α+ k2 sin
2 α,
gdje su k1, k2 glavne zakrivljenosti plohe S u p.
Dokaz.k(vp) = Sp(vp) · vp = Sp(cosαe1 + sinαe2) · (cosαe1 + sinαe2)
= cos2 α (Sp(e1) · e1) + cosα sinα (Sp(e1) · e2 + Sp(e2) · e1) + sin2 α (Sp(e2) · e2)
= k1 cos2 α+ k2 sin
2 α.
Napomena. Uocite k(e1) = k1, k(e2) = k2.
Navedimo jos izraz za normalnu zakrivljenost u karti. Neka je x : U → S karta na S,vp ∈ TpS. Znamo da postoji krivulja na plohi c : I → S, c(I) ⊂ x(U), c(t) = x(u(t), v(t)),takva da je c(0) = p, vp = c′(0).
Propozicija 3.6.5 Normalna zakrivljenost plohe S u tocki p u smjeru c′(0) jednaka je
k(c′(0)) =L(u′)2 + 2Mu′v′ +N(v′)2
E(u′)2 + 2Fu′v′ +G(v′)2,
gdje su E,F,G,L,M,N fundamentalne velicine prvog i drugog reda s obzirom na kartu x.
Zadaci
1. Pokazite da je normalna zakrivljenost sfere radijusa r u smjeru proizvoljnog tangen-cijalnog vektora jednaka ±1
r .

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 78
2. Pokazite da je normalna zakrivljenost jednoplosnog hiperboloida x2 + y2 − z2 = 1(s obzirom na Sp definiran pomocu jedinicnog normalnog polja n = ∇g
||∇g||) u tocki
p = (1, 0, 0) u smjeru
(i) tangencijalnog vektora v = (0, 0, 1) hiperbole kroz p jednaka k = 1,
(ii) tangencijalnog vektora v = (0, 1, 0) kruznice kroz p jednaka k = −1,
(iii) tangencijalnog vektora v = (√22 ,
√22 , 0) izvodnice kroz p jednaka k = 0.
3. Izracunajte normalnu zakrivljenost plohe x(u, v) = (u, v, u2 + v2) u smjeru tangen-cijalnog vektora krivulje c(t) = x(t2, t) u tocki koja odgovara parametru t = 1.
4. Neka je c : I → S krivulja (parametrizirana duljinom luka) na plohi S, c(I) ⊂ x(U),c(t) = x(u(t), v(t)). Neka je n jedinicno normalno polje plohe. Vektor c je okomit nan, te vektori c, n× c cine ortonormiranu bazu za tangencijalnu ravninu plohe. Kakoje c okomit na c, to vektor c ima rastav
c = an+ b (n× c),
gdje su a, b glatke funkcije na I. Pokazite da je funkcija a upravo jednaka normalnojzakrivljenosti plohe u smjeru c, a = k(c). Funkciju kg := b nazivamo geodetskazakrivljenost krivulje c. Pokazite da vrijedi
κ2 = k2g + k2n,
gdje je κ zakrivljenost krivulje c.
5. Neka je c : I → S krivulja (parametrizirana duljinom luka) na plohi S. Tada vektori{c′, q := n × c′, n} cine desnu ortonormiranu bazu za TpR
3. Neka je φ kut izmeduc′′ i n, cosφ = N · n, gdje je N polje glavnih normala od c.
(i) Pokaziten = cosφN + sinφBq = sinφN − cosφB,
gdje je B polje binormala od c.
(ii) Pokazite (prva jednakost je iz zadatka 4.)
c′′ = kn n+ kg qq′ = −kg c
′ + τg nn′ = −kn c
′ − τg q.
Funkcija τg naziva se geodetska torzija.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 79
3.7 Neke specijalne krivulje na plohi
Krivulje zakrivljenosti
Definicija 3.7.1 Za krivulju c : I → S kazemo da je krivulja zakrivljenosti (crta krivine,glavna krivulja) na plohi S ako je u svakoj njenoj tocki vektor c′ kolinearan s glavnimvektorom u toj tocki.
Propozicija 3.7.1 Krivulja c : I → S je krivulja zakrivljenosti ako i samo ako je Sp(c′)
kolinearan sa c′.
Dokaz. Kako je c′ kolinearan s glavnim vektorom e1 ili e2, to znaci i da je c′ takodersvojstven vektor operatora Sp. Stovise, primjerice, ako je c′ kolinearan sa e1, tada vrijedi
Sp(c′) = Sp(λe1) = λSp(e1) = λk1e1 = k1c
′,
gdje je k1 glavna zakrivljenost u smjeru e1.
Ocito svakom tockom prolaze dvije krivulje zakrivljenosti i one su medusobno okomite.Prema tome, krivulje zakrivljenosti odreduju jednu ortogonalnu mrezu krivulja na plohikoju nazivamo mrezom krivulja zakrivljenosti. Kako glavni vektori ne ovise o izboru kartena S, to ni mreza krivulja zakrivljenosti ne ovisi o izboru karte. Stoga je jos nazivamo iprirodnom mrezom na S.
Pokazat cemo da su u karti krivulje zakrivljenosti odredene jednom obicnom diferencijal-nom jednadzbom.
Propozicija 3.7.2 (Weingartenove formule) Neka je x : U → S, U ⊂ R2 karta naS. Tada je
nu = −S(xu) =MF − LG
EG− F 2xu +
LF −ME
EG− F 2xv (3.7.14)
nv = −S(xv) =NF −MG
EG− F 2xu +
MF −NE
EG− F 2xv. (3.7.15)
Dokaz. Kako su Sp(xu), Sp(xu) ∈ TpS, to postoje skalari a, b, c, d ∈ R takvi da je
−Sp(xu) = axu + bxu
−Sp(xv) = cxu + dxu.
Skalarnim mnozenjem prethodnih izraza sa xu, xv dobivamo
−L = aE + bF
−M = aF + bG,

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 80
i
−M = cE + dF
−N = cF + dG.
Za determinantu matrice tih sustava vrijedi∣∣∣∣ E FF G
∣∣∣∣ = W 2 > 0,
sto povlaci da sustavi imaju (jedinstveno) rjesenje (Cramerovi sustavi). Dobivamo
a =
∣∣∣∣ −L F−M G
∣∣∣∣W 2
, b =
∣∣∣∣ E −LF −M
∣∣∣∣W 2
,
c =
∣∣∣∣ −M F−N G
∣∣∣∣W 2
, d =
∣∣∣∣ E −MF −N
∣∣∣∣W 2
.
Propozicija 3.7.3 (ODJ za krivulje zakrivljenosti u karti) Neka je c : I → S kri-vulja na plohi S, x : U → S karta na S, c(I) ⊂ x(U), c(t) = x(u(t), v(t)). Krivulja c jekrivulja zakrivljenosti ako i samo ako vrijedi∣∣∣∣∣∣
(dvdt )2 −(dudt )(
dvdt ) (dudt )
2
E F GL M N
∣∣∣∣∣∣ = 0. (3.7.16)
Dokaz. Vektor c′ je kolinearan s glavnim vektorom plohe ako i samo ako je c′ kolinearansa S(c′) (Propozicija 3.7.1), odnosno ako i samo ako je
S(c′)× c′ = 0.
U karti x(U) vrijedi sljedece
S(c′)× c′ = S(xuu′ + xvv
′)× (xuu′ + xvv
′)
= (S(xu)× xv)(u′)2 + (S(xu)× xv)u
′v′ + (S(xv)× xu)u′v′ + (S(xv)× xv)(v
′)2.
Weingartenove formule povlace
S(xu)× xu = −LF −ME
W 2xv × xu,
S(xu)× xv = −MF − LG
W 2xu × xv,
S(xv)× xu = −MF −NE
W 2xv × xu,

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 81
S(xu)× xu = −NF −MG
W 2xu × xv.
Sada je
S(c′)× c′ =1
W 2
((LF −ME)(u′)2 + (LG−NE)u′v′ + (MG−NF )(v′)2
)xu × xv.
Ocito je S(c′)× c′ = 0 ako i samo ako je izraz u zagradi jednak 0. Primijetimo da taj izrazmozemo zapisati u obliku determinante iz tvrdnje.
Zadatak. Pokazite da su krivulje zakrivljenosti rotacijske plohe njene paralele i meridi-jani.
Zadatak. Odredite krivulje zakrivljenosti
(a) helikoida,
(b) tangentne plohe.
Od interesa je i znati kada se mreza krivulja zakrivljenosti podudara s parametarskommrezom plohe.
Propozicija 3.7.4 Mreza krivulja zakrivljenosti podudara se s parametarskom mrezomplohe ako i samo ako je F = M = 0.
Dokaz. Mreza krivulja zakrivljenosti je ortogonalna mreza. Parametarska mreza ploheje ortogonalna ako i samo ako je F = 0.
Pretpostavimo sada da se mreza krivulja zakrivljenosti podudara s parametarskommrezomplohe. Tada su rjesenja obicne diferencijalne jednadzbe za krivulje zakrivljenosti du = 0,dv = 0. Uvrstavanjem u (3.7.16) dobivamo MG = 0, EM = 0. Ako je M = 0, tada morabiti E = G = 0, sto s F = 0 daje W 2 = 0, kontradikcija. Prema tome, mora biti M = 0.
Obratno, ako je F = M = 0, dokazimo da se mreza krivulja zakrivljenosti podudara se sparametarskom mrezom plohe. Uvrstimo F = M = 0 u (3.7.16), tada je∣∣∣∣∣∣
(dvdt )2 −(dudt )(
dvdt ) (dudt )
2
E 0 GL 0 N
∣∣∣∣∣∣ = 0 (3.7.17)
odakle slijedi dudv = 0. Rjesenja su, dakle, du = 0 sto predstavlja parametarske v-krivulje,odnosno dv = 0 sto predstavlja parametarske u-krivulje.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 82
Asimptotske krivulje
Definicija 3.7.2 Smjer u tocki p ∈ S nazivamo asipmtotskim ako je normalna zakrivlje-nost plohe S u tocki p u tom smjeru jednaka 0.
Za asimptotske smjerove vrijedi:
Propozicija 3.7.5 (a) U eliptickoj tocki plohe ne postoje asimptotski smjerovi.
(b) U hiperbolickoj tocki plohe postoje tocno dva asimptotska smjera. Glavni smjerovi susimetrale kutova izmedu asimptotskih smjerova. Preciznije, za asimptotske smjerovea1, a2 i glavne smjerove e1, e2 u tocki p vrijedi
tg∠(e1, a1) = −tg∠(e1, a2) =√
−k1(p)
k2(p),
gdje su k1, k2 glavne zakrivljenosti u tocki p.
(c) U parabolickoj tocki, ukoliko je samo jedna glavna zakrivljenost jednaka 0, tada pos-toji samo jedan asimptotski smjer i on se podudara s glavnim smjerom, a ukoliko suobje glavne zakrivljenosti jednake 0, tada je svaki smjer u toj tocki asimptotski.
Dokaz. Sve tvrdnje izlaze iz Eulerovog teorema
k(vp) = k1 cos2 α+ k2 sin
2 α,
gdje je vp = cosαe1 + sinαe2. Trazimo smjer (asimptotski smjer) koji je odreden kutomα prema glavnom vektoru e1 za koji je
k1 cos2 α+ k2 sin
2 α = 0.
Tada trazeni kut α zadovoljava
tg2α = −k1k2
. (3.7.18)
(a) Ako je tocka elipticka, tada jek1k2
> 0, pa ne postoji smjer koji zadovoljava (3.7.18).
(b) Ako je tocka hiperbolicka, tada jek1k2
< 0, tada postoje dva kuta φ koji zadovoljavaju
(3.7.18). Pritom ocito vrijedi da glavni smjer e1 raspolavlja kut izmedu a1 i a2 (kojije jednak 2α).
(b) Ako je, na primjer, k1 = 0, k2 = 0, tada iz Eulerovog teorema slijedi k2 sin2 α = 0,
sto povlaci α = 0. Dobivamo da je asimptotski smjer a1 = e1. Slicno ako je k1 = 0,k2 = 0.
Ako je k1 = k2 = 0, tada je k(vp) = 0, za svaki smjer vp.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 83
Definicija 3.7.3 Za krivulju c : I → S kazemo da je asimptotska krivulja na S, ako je usvakoj njenoj tocki smjer odreden vektorom c′ asimptotski, k(c′) = 0.
Prema Propoziciji 3.7.5 slijedi da u hiperbolickom podrucju plohe svakom tockom prolazedvije asimptotske krivulje. One cine asimptotsku mrezu plohe. U parabolickim tockamata mreza degenerira u jednoparametarsku mrezu. U eliptickim tockama ne postoje asimp-totske krivulje.
Propozicija 3.7.6 Krivulja c : I → S je asimptotska ako i samo ako vrijedi
c′ · n′c = 0.
Dokaz. Krivulja c je asimptotska ako je k(c′) = 0. Iz definicije normalne zakrivljenostitada slijedi c′ · S(c′) = 0, odakle slijedi tvrdnja propozicije.
Propozicija 3.7.7 Krivulja c : I → S je asimptotska ako i samo ako vrijedi
c′′ ∈ TpS, p ∈ c(I).
Dokaz. Deriviranjem jednakosti c′ · nc = 0 slijedi
c′′ · nc + c′ · n′c = 0.
Sada prethodna propozicija povlaci da je krivulja c asimptotska ako i samo ako vrijedic′′ · nc = 0, odnosno c′′ ∈ TpS.
Uocimo da iz prethodne propozicije slijedi da su asimptotske krivulje one krivulje na Sduz kojih se tangencijalna ravnina plohe podudara s oskulacijskom ravninom krivulje.
Propozicija 3.7.8 Ploha S (koja nije ravnina) je minimalna ako i samo ako je njenaasimptotska mreza ortogonalna.
Dokaz. Ploha je minimalna ako je H = 0. Uocimo najprije da na takvoj plohi postojiasimptotska mreza. Zaista, H = 0 povlaci k1 = −k2, te su sve tocke minimalne plohehiperbolicke. Nadalje je
tg2φ = −k1k2
= 1.
Dakle, kut izmedu glavnog smjera e1 i asimptotskog smjera a1 jednak je π/4. Analogno,kut izmedu glavnog smjera e1 i asimptotskog smjera a2 jednak je −π/4. Dakle,
∠(a1, a2) = π/2.
Obrat analogno.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 84
Propozicija 3.7.9 (ODJ za asimptotske krivulje u karti) Neka je c : I → S krivu-lja na plohi S, x : U → S karta na S, c(I) ⊂ x(U), c(t) = x(u(t), v(t)). Krivulja c jeasimptotska krivulja ako i samo ako vrijedi
L(du
dt)2 + 2M(
du
dt)(dv
dt) +N(
dv
dt)2 = 0. (3.7.19)
Dokaz. Krivulja c je asimptotska ako i amo ako je k(c′) = 0, odnosno S(c′) · c′ = 0. Ukarti imamo c′ = xuu
′ + xvv′, te je
S(c′) · c′ = L(du
dt)2 + 2M(
du
dt)(dv
dt) +N(
dv
dt)2.
Zadatak. Neka je c prava prostorna krivulja i S pravcasta ploha njenih glavnih normala.Dokazite da je c asimptotska krivulja na S.
Zadatak. Odredite asimptotske krivulje na helikoidu.
Propozicija 3.7.10 Parametarska mreza plohe se podudara s asimptotskom mrezom akoi samo ako vrijedi L = N = 0.
Dokaz. Asimptotska mreza postoji na hiperbolickom dijelu plohe, LN −M2 < 0.
Ako je L = N = 0, tada iz (3.7.19) slijedi Mdudv = 0. Kako ne moze biti i M = 0 (zbogLN −M2 < 0) asimptotske krivulje su krivulje du = 0, dv = 0, tj. parametarske krivulje.
Obratno, ako je rjesenje obicne diferencijalne jednadzbe (3.7.19) du = 0, tada je N = 0.Analogno, za rjesenje dv = 0 je L = 0.
Geodetske krivulje
Pravac kao krivulja u ravnini ima, primjerice, sljedeca svojstva:
1◦ Pravac je krivulja zakrivljenosti 0.
2◦ Dio pravca je najkraca spojnica dviju tocaka u ravnini.
3◦ Za bilo koje dvije tocke u ravnini postoji jedinstveni pravac koji ih spaja.
4◦ Tangencijalni vektori pravca su u svim tockama paralelni.
5◦ Vektori akceleracije pravca u svim tockama iscezavaju.
Cilj nam je definirati klasu krivulja na plohi koja generalizira ta svojstva. U definiciji,generalizirat cemo zadnje svojstvo.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 85
Definicija 3.7.4 Za krivulju c : I → S kazemo da je geodetska ako je u svakoj njenojtocki vektor c′′ okomit na plohu.
Drugim rijecima, krivulja c na plohi je geodetska ako postoji funkcija λ : I → R takva daje
c′′ = λnc.
Za geodetske krivulje, dakle, akceleracija c′′ nema tangencijalnu komponentu.
Navedimo neka svojstva geodetskih krivulja.
Propozicija 3.7.11 Geodetske krivulje su krivulje konstantne brzine.
Dokaz. Neka je c : I → S geodetska, c′′ = λnc. Tada je
c′ · c′′ = c′ · λnc = 0.
Dakle,d
dt(c′(t))2 = 0, t ∈ I.
Odavde je (c′(t))2 = const., tj. c je krivulja konstantne brzine.
Primjer 1. Geodetske krivulje u ravnini su pravci.
Zaista, ako je n normalno polje ravnine, tada opcenito za krivulju c u ravnini vijedic′ · n = 0. Deriviranjem te jednakosti (n je konstantno polje!) dobivamo
c′′ · n = 0.
Ako je c geodetska, tada prethodna jednakost uz uvjet c′′ ||n povlaci c′′ = 0. Dakle, c jepravac.
Primijetimo da je svaki pravac (ili njegov dio) na plohi uvijek geodetska krivulja na tojplohi.
Primjer 2. Geodetske krivulje na sferi su velike (glavne) kruznice.
To su kruznice koje se dobivaju kao presjeci sfere ravninom kroz njezino srediste. Zaista,neka je c velika kruznica na sferi i neka je parametrizirana duljinom luka. Kako c′′ pokazujeprema sredistu te kruznice, a ono je ujedno i srediste sfere, to je c′′ kolinearno s jedinicnimnormalnim poljem n sfere.
Da bismo pokazali da su to jedine geodetske krivulje na sferi, uocimo najprije sljedece.Neka je c : I → S geodetska krivulja parametrizirana duljinom luka. Tada je moguceplohu S orijentirati tako da je
S(T ) = κT − τB, (3.7.20)
gdje je T = c′ tangencijalni vektor, B binormala, κ fleksija, a τ torzija od c. Zaista, kakoje c′′ kolinearno s nc i kolinearno s glavnom normalom N , plohu S mozemo orijentiratitako da je nc = N . Tada je
S(T ) = S(c′) = −n′c = −N ′ = −(−κT + τB).

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 86
Neka je sad c geodetska krivulja na sferi, parametrizirana duljinom luka. Za operatoroblika sfere vrijedi Sp = ±1
r I, gdje je r radijus sfere. Usporedujuci tu cinjenicu sa (3.7.20),dobivamo da za geodetsku krivulju vrijedi da joj je torzija 0, a fleksija 1
r . Prema tome,geodetska krivulja je velika kruznica.
Primjer 3. Geodetske krivulje na kruznom cilindru.
Neka je zadan kruzni cilindar x2 + y2 = r2. Tvrdimo da su geodetske krivulje oblika
c(t) = (r cos(at+ b), r sin(at+ b), ct+ d), a, b, c, d ∈ R.
Neka je x(u, v) = (r cosu, r sinu, v) karta na cilindru. Tada svaku krivulju na cilindrumozemo napisati u obliku
c(t) = (r cosu(t), r sinu(t), v(t)).
Normalno polje n cilindra je okomito na z-os, n(u, v) = (r cosu, r sinu, 0). Za geodetskukrivulju c vrijedi c′′ ||n, sto povlaci v′′(t) = 0. Odavde je v(t) = ct+ d, c, d ∈ R. Nadalje,ako je geodetska krivulja konstantne brzine to je
||c′(t)||2 = r2(u′)2 + (v′)2 = r2(u′)2 + c2 = const.
Dakle, mora biti i u′(t) = const := a, sto povlaci u(t) = at+ b, a, b ∈ R.
Posebno, geodetske krivulje na kruznom cilindru su izvodnice cilindra (a = 0), poprecnekruznice (c = 0) i obicne cilindricne spirale (a = 0, c = 0).
Propozicija 3.7.12 (ODJ za geodetske krivulje u karti) Neka je c : I → S krivuljana plohi S, x : U → S karta na S, c(I) ⊂ x(U), c(t) = x(u(t), v(t)). Krivulja c jegeodetska ako i samo ako vrijedi
u′′ + Γ111u
′2 + 2Γ112u
′v′ + Γ122v
′2 = 0
v′′ + Γ211u
′2 + 2Γ212u
′v′ + Γ222v
′2 = 0,
gdje su Γkij Christofellovi simboli 2. vrste definirani sa
xuu = Γ111xu + Γ2
11xv + Lnxuv = Γ1
12xu + Γ212xv +Mn
xvv = Γ122xu + Γ2
22xv +Nn.(3.7.21)
Dokaz. Neka je c krivulja na plohi, c(t) = x(u(t), v(t)). Tada je
c′ = xuu′ + xvv
′
c′′ = xuu(u′)2 + 2xuvu
′v′ + xvv(v′)2 + xuu
′′ + xvv′′.
Uvrstimo u c′′ izraze (3.7.21) i izjednacimo s 0 komponente uz xu, xv (jer je c′′ je kolinearno
s n).
Koristenjem prethodne propozicije i Picard-Lindelofovog teorema o jedinstvenosti rjesenjasustava obicnih diferencijalnih jednadzbi uz dane pocetne uvjete, pokazuje se da vrijedi:

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 87
Propozicija 3.7.13 Za svaku tocku p = x(u0, v0) plohe S i tangencijalni vektor vp ∈ TpSpostoji jedinstvena geodetska krivulja c takva da vrijedi c(0) = p, c′(0) = vp.
Primjer 3. Geodetske krivulje na rotacijskoj plohi.
Parametrizirajmo rotacijsku plohu standardnom parametrizacijom
x(u, v) = (g(u), h(u) cos v, h(u) sin v).
Racunom dobijemo
Γ212 =
h′
h, Γ1
22 = −hh′,
a ostali koeficijenti su jednaki 0. Prema tome, sustav ODJ glasi
u′′ − hh′(v′)2 = 0
v′′ + 2h′
hu′v′ = 0.
Uocimo da sljedece krivulje zadovoljavaju sustav ODJ – parametarske krivulje v = v0 (me-ridijani plohe) i parametarske krivulje u = u0 (paralele) uz sljedeci uvjet. Uvrstavanjemu sustav dobivamo
hh′(v′)2 = 0
v′′ = 0.
Da bi paralela bila geodetska krivulja mora vrijediti h′ = 0 (i obratno). Tada je vektorxu = (g′, h′ cos v, h′ sin v) = (g′, 0, 0) paralelan osi rotacije.
Zadaci
1. Pokazite da je svaki normalni presjek plohe geodetska krivulja.
2. Pokazite da je c : I → S
(i) asimptotska krivulja ako i samo ako je normalna zakrivljenost plohe u smjeruc′ jednaka 0, kn = 0;
(ii) geodetska krivulja ako i samo ako je njezina geodetska zakrivljenost9 jednaka0, kg = 0;
(iii) krivulja zakrivljenosti ako i samo ako je njezina geodetska torzija jednaka 0,τg = 0.
3. Pokazite ako je c geodetska i asimptotska krivulja, da je c pravac.
4. Pokazite da je pravac sadrzan u plohi uvijek asimptotska krivulja.
9Vidi zadatak 4., poglavlje 3.6.
POGLAVLJE 3. LOKALNA TEORIJA PLOHA 88
5. Paralelni pomak (prijenos). Neka je c : I → S krivulja na plohi. Za glatko
vektorsko polje X(t) ∈ Tc(t)S duz c kazemo da je paralelno duz c ako jedX
dtparalelno
plosnoj normali n. Drugim rijecima, polje je paralelno ako se njegova promjena ”nevidi” sa plohe.
(a) Neka je S sfera, c(t) = (cos t, sin t, 0) ekvator. Pokazite da su polja X(t) =(0, 0, 1) i Y (t) = (− sin t, cos t, 0) paralelna duz c.
(b) Neka je c : I → S krivulja. Pokazite da je njezino tangencijalno polje paralelnoduz c ako i samo ako je c geodetska.
(c) Neka je S sfera, c(t) = (√22 cos t,
√22 sin t,
√22 ) ”mala kruznica” na S. Pokazite
da njezino tangencijalno polje T (t) nije paralelno duz c (stoga c nije geodetska).
(d) Neka je x : U → S karta od S, c : I → S krivulja na S, c(I) ⊂ x(U),c(t) = x(u1(t), u2(t)). Vektorsko polje X(t) ∈ Tc(t)S duz c mozemo prikazati uobliku X(t) = X1(t)xu + X2(t)xv. Pokazite da je X(t) paralelno duz c ako isamo ako vrijedi
(Xk)′(t) +
2∑i,j=1
Γki,jX
i(t)(ui)′(t) = 0, k = 1, 2.
(e) Neka je c : I → S krivulja, I = [a, b]. Neka je zadan vektor Xa ∈ Tc(a)S.Tada postoji jedinstveno paralelno vektorsko polje X(t) duz c za koje vrijediX(a) = Xa. To polje nazivamo paralelni prijenos od Xa duz c.Uputa. Treba rijesiti prethodni sustav ODJ uz zadane pocetne uvjete.
(f) Neka su X(t), Y (t) vektorska polja paralelna duz c. Tada su velicine
X(t) · Y (t), ||X(t)||
konstantne.Uputa. Izracunati d
dt
(X(t) · Y (t)
)i koristiti definiciju paralelnosti.
(g) Prenesite paralelno vektor (0, 0, 1) duz ekvatora sfere, duz jednog meridijanado sjevernog pola i duz nekog drugog meridijana do sjevernog pola. Sto primi-jecujete?Uputa. Kako su ekvator i meridijani geodetske krivulje na sferi, kut pri paralel-nom prijenosu zadanog vektora i tangecijalnih polja tih krivulja ostaje sacuvan.Prema tome, (0, 0, 1) ostaje konstantan duz ekvatora, dok se pri pomaku pomeridijanu mijenja. Krajnji vektori na sjevernom polu dobiveni pri pomaku porazlicitim meridijanima nisu jednaki.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 89
3.8 Theorema Egregium (Velicanstveni teorem)
Neka su M,N plohe u R3. Cilj ovog poglavlja je opisati preslikavanje medu plohama kojecuva mjerenja na plohama, tj. cuva njihove metrike. Takvo cemo preslikavanje nazivatilokalnom izometrijom.
U tu svrhu definirajmo najprije diferencijal glatkog preslikavanja F : M → N kao presli-kavanje izmedu tangencijalnih ravnina, F∗|p : TpM → TF (p)N .
Neka je vp ∈ TpM tangencijalni vektor plohe M , te neka su x : U → M , x : U → Nkarte oko tocaka p ∈ M i F (p) ∈ N . Tada po definiciji, postoji krivulja c : I → M ,c(I) ⊂ x(U), c(t) = x(u(t), v(t)), takva da je c(0) = p, c′(0) = vp. Diferencijal F∗|ptangencijalnom vektoru vp pridruzuje tangencijalni vektor plohe N koji je tangencijalnivektor slike krivulje c pri preslikavanju F , dakle krivulje F ◦ c : I → N , F (c(I)) ⊂ x(U)
F∗|p(vp) = (F (p),d(F ◦ c)
dt|t=0) = (F (p), (F ◦ c)′(0)). (3.8.22)
Propozicija 3.8.1 Vektor (F ◦ c)′(0) ne ovisi o izboru krivulje c. Preslikavanje F∗|p :TpM → TF (p)N definirano sa (3.8.22) je linearni operator.
Dokaz. Oznacimo sa ϕ : U → U , U, U ⊂ R2,
ϕ = x−1 ◦ F ◦ x
koordinatno preslikavanje (tzv. koordinatni prikaz preslikavanja F ). Pisemo ϕ(u, v) =(ϕ1(u, v), ϕ2(u, v)) = (u, v). Odavde je
(F ◦ c)(t) = (x ◦ ϕ)(u(t), v(t)).
Dakle
(F ◦ c)′(0) = xu∂u
∂t+ xv
∂v
∂t|t=0, (3.8.23)
gdje je∂u
∂t=
∂ϕ1
∂t=
∂u
∂u
∂u
∂t+
∂u
∂v
∂v
∂t|t=0 =
∂u
∂uu′(0) +
∂u
∂vv′(0), (3.8.24)
∂v
∂t=
∂ϕ2
∂t=
∂v
∂u
∂u
∂t+
∂v
∂v
∂v
∂t|t=0 =
∂v
∂uu′(0) +
∂v
∂vv′(0). (3.8.25)
Prethodni zapis djelovanja od F∗|p povlaci da F∗|p ne ovisi o izboru krivulje, nego samoo ”pocetnim uvjetima” c(0) = p, c′(0) = vp. Takoder, zapis povlaci da je F∗|p linearnopreslikavanje. Odredimo njegov matricni prikaz u paru baza {xu,xv} od TpM i {xu, xv}
od TF (p)N . Vektor vp = c′(0) = xuu′(0) + xvv
′(0) u bazi {xu,xv} ima prikaz
[u′(0)v′(0)
],
stoga (3.8.23), (3.8.24), (3.8.25) povlace da je matricni prikaz preslikavanja F∗|p Jacobijevamatrica preslikavanja ϕ
F∗|p =[
∂u∂u
∂u∂v
∂v∂u
∂v∂v
]p
. (3.8.26)

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 90
Definicija 3.8.1 Lokalna izometrija F : M → N ploha je glatko preslikavanje ciji dife-rencijal F∗|p : TpM → TF (p)N cuva skalarni produkt tangencijalnih vektora iz TpM zasvaki p, tj. vrijedi
vp · wp = F∗|p(vp) · F∗|p(wp). (3.8.27)
Uocimo takoder sljedece:
1) F ne mora biti izometrija prostora : R3 → R3, no restrikcija svake izometrije pros-tora na M je lokalna izometrija.
2) F ne mora biti bijekcija. Za preslikavanje koje je lokalna izometrija i bijekcija kazemoda je izometrija ploha.
Kako lokalna izometrija cuva skalarni produkt tangencijalnih vektora, cuva i normu tan-gencijalnih vektora, odnosno, cuva prve fundamentalne forme forme ploha (slijedi iz de-finicije prve fundamentalne forme I(vp, wp) = vp · wp). Lokalnu izometriju zamisljamokao preslikavanje koje savija plohe, ali pritom cuva unutrasnju udaljenost (tj. udaljenostna plohi) medu tockama. Dakle ”stanovnici plohe” ne bi bili svjesni nikakvih promjenaizazvanih lokalnom izometrijom, jer bi njihova geometrijska mjerenja ostala sacuvana.
Lema 3.8.2 Lokalna izometrija ploha je glatki lokalni difeomorfizam.
Dokaz. Iz uvjeta (3.8.27) slijedi da je diferencijal F∗|p prevodi ortonormiranu bazu uortonormiranu bazu (cuva skalarni produkt), pa je stoga regularan operator. Tada je poTeoremu o inverznim funkcijama preslikavanje F lokalni difeomorfizam.
Neka je sada x : U → S karta na S. Uocimo, dakle, da je F lokalna izometrija ako i samoako vrijedi
∂x
∂ui· ∂x
∂uj=
∂(x ◦ ϕ)∂ui
· ∂(x ◦ ϕ)∂uj
, i, j = 1, 2, (3.8.28)
gdje smo, radi jednostavnosti zapisa izraza (3.8.28), oznacili u1 = u, u2 = v. Zaista, kakovrijedi
F ◦ x = x ◦ ϕ : U → x(U),
te uz (F ◦ c)(t) = (F ◦ x)(u1(t), u2(t)), za parametarske krivulje u1 = (u1)0 i u2 = (u2)0 utocki p = x((u1)0, (u2)0) vrijedi
F∗|p(xu1) =d(F ◦ x)(u1, (u2)0)
du1=
d(x ◦ ϕ)(u1, (u2)0)du1
=∂(x ◦ ϕ)(u1, u2)
∂u1.
Analogno F∗|p(xu2) =∂(x ◦ ϕ)∂u2
((u1)0, (u2)0), iz cega slijedi (3.8.28).
Uocimo, kako vektori { ∂x
∂u1,∂x
∂u2} cine bazu za tangencijalnu ravninu Tp(M), uvjet (3.8.27)
je dovoljno provjeriti samo na njima.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 91
Uvjet (3.8.28) zapisan, primjerice za E = x1 · x1 glasi
E =∂x(u, v)
∂u· ∂x(u, v)
∂u=
(∂x(u, v)
∂u
∂u
∂u+
∂x(u, v)
∂v
∂v
∂u
)2
=
E(∂u
∂u)2 + 2F
∂u
∂u
∂v
∂u+ G(
∂v
∂u)2.
Iz prethodnog slijedi, ako za domene karata uzmemo isti skup, tj. U = U , a za koor-dinatno preslikavanje ϕ = Id, tada sljedeci teorem daje jednostavan nacin provjere je lipreslikavanje F lokalna izometrija.
Teorem 3.8.3 Glatko preslikavanje F je lokalna izometrija ako i samo
E = E, F = F , G = G,
pri cemu su funkcije E,F,G odnosno E, F , G fundamentalne velicine prvog reda s obziromna karte x, odnosno x definirane na istom otvorenom skupu U .
Dokaz. Iz U = U , ϕ = Id i (3.8.28).
Primjer 1. Lokalna izometrija ravnine i (otvorenog) cilindra.
Neka je dana ravnina sax(u, v) = (u, v, 0), u, v ∈ R.
Tada je E = 1, F = 0, G = 1. Neka je cilindar parametriziran s
x(u, v) =(r cos
u
r, r sin
u
r, v), u, v ∈ R,
i tada je E = 1, F = 0, G = 1. Sada Teorem 3.8.3 povlaci da su ravnina i cilindar lokalnoizometricni. Uocimo jos da je restrikcija ovog preslikavanja na otvoren interval u ∈ ⟨0, 2π⟩zapravo i izometrija izmedu beskonacne trake ravnine i cilindra bez jedne izvodnice. No,ta se izometrija ne moze prosiriti na cijeli cilindar. Naime, beskonacna traka ravnine icilindar nisu ni homeomorfni (svaka zatvorena krivulja u ravnini se moze stegnuti u tocku,dok se npr. poprecna kruznica na cilindru ne moze stegnuti u tocku).
Primjer 2. Lokalna izometrija helikoida i katenoida.
Uobicajena parametrizacija K katenoida je
x(u, v) = (achu cos v, achu sin v, au), u ∈ R, v ∈ ⟨0, 2π⟩,
pa jeE = a2ch2u, F = 0, G = a2chu.
S druge strane, ako je helikoid H parametriziran s
x(u, v) = (u cos v, u sin v, av), u ∈ R, v ∈ ⟨0, 2π⟩,

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 92
tada su njegove fundamentalne velicine prvog reda E = 1, F = 0, G = u2 + a2. Da bismomogli usporediti fundamentalne velicine prvog reda tih dviju ploha, uvedimo zamjenuvarijabli
u = a shu ∈ R, v = v ∈ ⟨0, 2π⟩,
za koju je∂(u, v)
∂(u, v)= a chu. Tada je parametrizacija helikoida
x(u, v) = (ashu cos v, ashu sin v, av),
i fundamentalne velicine prvog reda glase
E = a2ch2u, F = 0, G = a2ch2u
pa koristeci Teorem 3.8.3 slijedi tvrdnja.
Uocimo da dana lokalna izometrija preslikava jedan ”zavoj” helikoida (sto odgovara para-metru u ∈ ⟨0, 2π⟩) na katenoid bez jednog meridijana.
Unutrasnja (intrinzicna) geometrija ploha bavi se proucavanjem velicina koje ostaju sa-cuvane pri izometrijama F : M → N (tzv. izometricke invarijante). K. F. Gauss bio jepostavio pitanje: Koje velicine plohe M pripadaju unutrasnjoj geometriji?
Definicija izometrije sugerira da te velicine moraju ovisiti samo o skalarnom produktutangencijalnih vektora, tj. o velicinama E,F,G. Stoga je ocito da normalno polje plohenije velicina unutrasnje geometrije (usporedi normalno polje ravnine i cilindra).
Dijelu plohe M koji je parametriziran sa x : U → M , x = x(u, v), mozemo pridruzitibazu {xu,xv, n} prostora TpR , p ∈ M , gdje je n normalno, jedinicno, glatko polje naM . Izrazimo li vektore xuu,xuv,xvv u toj bazi, dobivamo formule (3.7.21), u kojima sejavljaju funkcije Γk
ij , i, j, k = 1, 2, Christoffel-ovi simboli 2. vrste. Cilj nam je pokazati daih mozemo izraziti preko fundamentalnih velicina E,F,G prvog reda i njihovih derivacija.
Kako je x2u = E, to parcijalnim deriviranjem po u dobivamo
2xu · xuu = Eu.
AnalognoFu = xuu · xv + xu · xuv,
Gu = 2xv · xuv,
Ev = 2xu · xuv,
Fv = xuv · xv + xu · xvv,
Gv = 2xv · xvv.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 93
Odavde slijedixuu · xu = Γ1
11E + Γ211F = 1
2Eu
xuu · xv = Γ111F + Γ2
12G = Fu − 12Ev
xuv · xu = Γ112E + Γ2
12F = 12Ev
xuv · xv = Γ112F + Γ2
22G = 12Gu
xvv · xu = Γ122E + Γ2
22F = Fv − 12Gu
xvv · xv = Γ122F + Γ2
11G = 12Gv.
Dakle, ocito je da Christoffelove simbole mozemo izraziti preko koeficijenata E,F,G prvefundamentalne forme i njihovih derivacija. Dobivamo
Γ111 =
GEu − 2FFu + FEv
2W 2,
Γ211 =
2EFu − EEv − FEu
2W 2,
Γ112 =
GEv − FGu
2W 2,
Γ212 =
EGu − FEv
2W 2,
Γ122 =
2GFv −GGu − FGv
2W 2,
Γ222 =
EGv − 2FFv + FGu
2W 2.
Stoga su Christoffelovi simboli velicine unutrasnje geometrije plohe. Nadalje, sjetimo seda su geodetske krivulje odredene sustavom obicnih diferencijalnih jednadzbi u kojima sejavljaju Christeffelovi simboli. Stoga su i geodetske krivulje takoder velicine unutrasnjegeometrije.
Nadalje, zelimo da vrijedi (tzv. uvjeti integrabilnosti)
(xuu)v − (xuv)u = 0,(xvv)u − (xvu)v = 0,
nuv − nvu = 0.
Izvedimo najprije formule za nu, nv. Kako je nu = −Sp(xu) ∈ TpM , to je
−nu = axu + bxv,−nv = cxu + dxv,
(3.8.29)
gdje su a, b, c, d koeficijenti odredeni Weingartenovim formulama (3.7.2).
Uvrstavanjem izraza za derivacije od xuu,xuv,xvv, nu, nv dobivamo
A1 xu + B1 xv + C1 n = 0,A2 xu + B2 xv + C2 n = 0,A3 xu + B3 xv + C3 n = 0,

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 94
pri cemu su A1, . . . , C3 glatke funkcije na U . No, kako su polja xu,xv, n linearno nezavisna,to su funkcije A1 = B1 = C1 = A2 = . . . = C3 = 0.
Pogledajmo sto povlaci A1 = B1 = C1 = 0.
Γ111xuv + Γ2
11xvv + Lnv ++(Γ111)vxu + (Γ2
11)vxv + Lvn = (3.8.30)
= Γ112xuu + Γ2
12xvu +Mnu + (Γ112)uxu + (Γ2
12)uxv +Mun.
Koristenjem izraza kojima definiramo Christoffelove simbole i izjednacavanjem clana uzxv sa 0, dobivamo
Γ111Γ
212 + Γ2
11Γ222 + L
FM − EN
EG− F 2+ (Γ2
11)v = Γ112Γ
211 + Γ2
12Γ212 +M
FL− EM
EG− F 2+ (Γ2
12)u.
(3.8.31)
Uvrstavanjem u (3.8.31) koeficijenata iz (3.8.29) dobivamo
Γ111Γ
212 + Γ2
11Γ222 + L
FM − EN
EG− F 2+ (Γ2
11)v =
= Γ112Γ
211 + Γ2
12Γ212 +M
FL− EM
EG− F 2+ (Γ2
12)u.
Dakle,(Γ2
12)u − (Γ211)v + Γ1
12Γ211 + Γ2
12Γ212 − Γ1
11Γ212 − Γ2
11Γ222 =
L(FM − EN)−M(FL− EM)
EG− F 2=
−E(LN −M2)
EG− F 2= −EK. (3.8.32)
Prema tome, dobili smo sljedeci izraz
K =1
E
((Γ2
11)v − (Γ212)u − Γ1
12Γ211 − Γ2
12Γ212 + Γ1
11Γ212 + Γ2
11Γ222
). (3.8.33)
Izraz (3.8.33) naziva se Gaussova formula.
Stoga smo dokazali:
Teorem 3.8.4 (Theorema Egregium, Gauss) Zakrivljenost K je invarijanta pri lo-kalnim izometrijama, tj. ako je F : M → N lokalna izometrija, tada je
K(p) = K(F (p)
), p ∈ M.
Dakle, Gaussova zakrivljenost K je pojam unutrasnje geometrije, tj. moze se odreditiiz samih mjerenja na plohi. Taj je rezultat Gaussa toliko odusevio, da ga je nazvao”velicanstvenim”. Dokazao ga je 1827. godine.
Navedimo jos dvije formule za racunanje Gaussove zakrivljenosti pomocu velicina E,F,Gi njihovih derivacija.

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 95
Propozicija 3.8.2 (Brioschi-jeva formula)
K =1
(EG− F 2)2
∣∣∣∣∣∣−1
2Evv + Fuv − 12Guu
12Eu Fu − 1
2Ev
Fv − 12Gu E F
12Gv F G
∣∣∣∣∣∣−
∣∣∣∣∣∣0 1
2Ev12Gu
12Ev E F12Gu F G
∣∣∣∣∣∣ .
Specijalno, u ortogonalnoj parametarskoj mrezi F = 0 vrijedi
Propozicija 3.8.3
K =−1√EG
{∂
∂u
(1√E
∂√G
∂u
)+
∂
∂v
(1√G
∂√E
∂v
)}
=−1
2√EG
{∂
∂u
(Gu√EG
)+
∂
∂v
(Ev√EG
)}.
Zadatak. Izracunajte zakrivljenost sfere radijusa R koristeci prethodne formule.
Napomena: Gaussova zakrivljenost je definirana kao produkt glavnih zakrivljenosti K =k1k2, no glavne zakrivljenosti nisu velicine unutrasnje geometrije. Za ravninu su objeglavne zakrivljenosti 0, dok je za cilindar jedna glavna zakrivljenost 0, a druga −1/r.Obje plohe imaju Gaussovu zakrivljenost 0.
Napomena: Gaussova zakrivljenost helikoida i katenoida jednaka je
K = − 1
a2ch4u.
Uocimo da su helikoid i katenoid i minimalne plohe, pa su im i glavne zakrivljenostijednake. No one ipak nisu ”kongruentne”, tj. ne postoji izometrija prostora koja jednupreslikava na drugu.
Napomena: Gaussov Teorema Egregium moze se koristiti kako bi se pokazalo da plohe
nisu izometricne, kao na primjer sfera (K =1
r2) i ravnina (K = 0). To je problem karto-
grafije, nijedno preslikavanje sa sfere na ravninu ne cuva metriku. No postoje preslikavanjakoja su slabija, npr. koja cuvaju kutove (konformna preslikavanja) ili povrsinu (ekviarealnapreslikavanja).
Napomena: Obrat Gaussovog Theorema Egregium ne vrijedi. Postoje plohe koje imajujednaku Gaussovu zakrivljenost, no nisu izometricne (helikoid i lijevak, ploha koja nastajerotacijom krivulje c(u) = (u, logu, 0) oko y-osi).

POGLAVLJE 3. LOKALNA TEORIJA PLOHA 96
Ako u izrazu (3.8.30) racunamo koeficijent uz xu, dobivamo
(Γ112)u − (Γ1
11)v + Γ212Γ
112 − Γ2
11Γ122 = FK,
sto takoder daje izraz za K. Ovo je takoder Gaussova formula, drugi oblik.
Odredivanjem u izrazu (3.8.30) koeficijent uz n, dobivamo
Lv −Mu = LΓ112 +M(Γ2
12 − Γ111)−NΓ2
11. (3.8.34)
Analogno, uvjeti A2 = 0, B2 = 0 daju Gaussove formule, a C2 = 0 daje
Mv −Nu = LΓ122 +M(Γ2
22 − Γ112)−NΓ2
12. (3.8.35)
Nadalje C3 = 0 je identitet, A3 = 0, B3 = 0 su jednadzbe (3.8.34) i (3.8.35). One se josnazivaju Mainardi - Codazzijeve jednadzbe.
Na kraju, postavimo jos pitanje, koje velicine jedinstveno (do na polozaj) odreduju plohuu prostoru, dakle, i njezin vanjski oblik, a ne samo mjerenja na plohi. Sjetimo se da jekrivulja u prostoru zadana je s dvije glatke funkcije, svojom fleksijom i torzijom. Za plohuu prostoru se pokazuje da je zadana sa sest funkcija koje su povezane nekim relacijama.Preciznije, vrijedi sljedeci teorem.
Teorem 3.8.5 (Fundamentalni teorem za plohe u R3) Neka su E,F,G, L,M,Nglatke funkcije definirane na otvorenom skupu U ⊆ R2, E > 0, G > 0. Neka onezadovoljavaju Gaussove formule i Mainardi-Codazzijeve jednadzbe i neka je EG−F 2 > 0.Tada za svaku tocku q ∈ U postoji okolina V ⊆ U od q i glatki difeomorfizam x : V →x(V ) ⊆ R3 tako da regularna ploha x(V ) ⊆ R3 ima E,F,G,L,M,N za fundamentalnevelicine 1. i 2. reda. Nadalje, ako je V povezan, a x : V → x(V ) ⊆ R3 neki drugiglatki difeomorfizam koji zadovoljava navedene uvjete, tada postoji izometrija prostoraf : R3 → R3 tako da je
x = f ◦ x.





























