Embed Size (px)
Citation preview
Kinetic Energy Harvesting
Weekly Advisor MeetingNovember 13, 2013
November 13, 2013 2
Basic LED visual indicator circuit designed◦ Red (>1.65V)◦ Yellow (>2.25V, >2.35V)◦ Green (>2.45V, >2.55V)
Cap overvoltage protection parts chosen 1.8V and 3.3V boost power supply designed
◦ Both operational when cap voltage > 1.2V All parts ordered, arriving Thurs Will be built this weekend Possible 5V supply for next semester
Electrical Progress
November 13, 2013 3
Steel hand crank fixture made Gear analysis
◦ Stress factors◦ Material strength◦ Intermediate ratios◦ Fewer gears, better efficiency
Gears are expensive◦ Current best option: Amazon (~$180)◦ 3D printing ($5/in^3)
Gears, shafts, pillow block mounted bearings to be ordered ASAP
Mechanical Progress
November 13, 2013 4
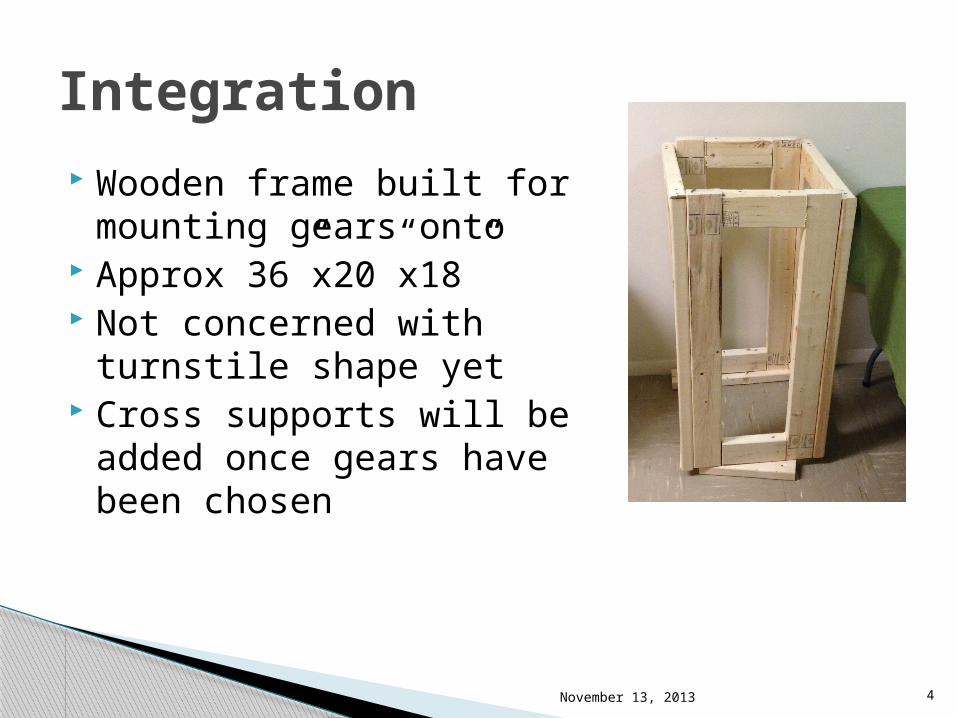
Wooden frame built for mounting gears onto
Approx 36”x20”x18” Not concerned with turnstile
shape yet Cross supports will be added
once gears have been chosen
Integration
November 13, 2013 5
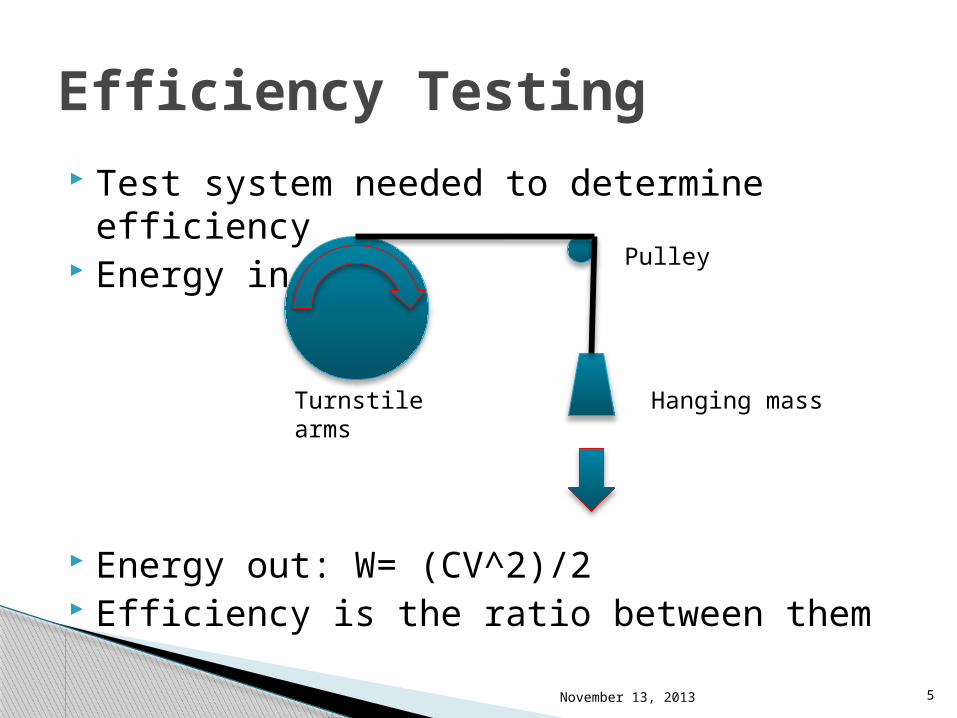
Test system needed to determine efficiency Energy in:
Energy out: W= (CV^2)/2 Efficiency is the ratio between them
Efficiency Testing
Turnstile arms
Pulley
Hanging mass
November 13, 2013 6
Figure out what we need to test system Assemble circuits (Est. 3+ hours) Select gears Purchase gears Mount gears/shafts onto frame Measure efficiency Assignments...
To Do
November 13, 2013 7
Individual build summary paper (11/14) Two weeks exactly until final report (11/27) Thanksgiving break – no weekend meeting Final presentations begin (12/3) Final poster (12/4) Poster competition (12/5) Establish website presence Next Semester – switch to ECE requirements
◦ No more weekly papers
Assignment Schedule
November 13, 2013 8
Time to ship, build, and test before final report
Funds quickly decreasing Prof. Sup: choosing optimal motor speed Prof. Sup: design not complex enough No time to recover if parts don’t fit together
Concerns





























