Embed Size (px)
Citation preview

4746 IEEE SENSORS JOURNAL, VOL. 18, NO. 11, JUNE 1, 2018
WiFi Sensing-Based Real-Time Bus Tracking andArrival Time Prediction in Urban Environments
Rui Zhang, Wenping Liu, Senior Member, IEEE, Yufu Jia, Guoyin Jiang, Jing Xing,Hongbo Jiang, Senior Member, IEEE, and Jiangchuan Liu, Fellow, IEEE
Abstract— Offering the services of real-time tracking andarrival time prediction is a common welfare for bus ridersand transit agencies, especially in urban environments. On thedown side, the traditional GPS-based solutions work poorly inurban areas due to urban canyons, while the location systemsbased on cellular signal also suffer from inherent limitations.In this paper, we present a powerful tool named signal Voronoidiagram (SVD) to partition the radio-frequency signal space ofWiFi access points (APs), distributed, where a bus travels, intosignal cells, and then into fine-grained signal tiles, tackling theproblem of noisy received signal strength readings and possibleAP dynamics. On top of SVD, we present a novel frameworkso-called WiLocator, to track an urban bus based on thesurrounding WiFi information collected by the commodity off-the-shelf smartphones of bus riders and the mobility constraintof a bus. To predict the bus arrival time, we incorporate thecomputed location information and the temporal consistency oftravel time of buses on the overlapped road segments. We thenpresent WiLocator(p) which utilizes the historical data of buslocations to compute dominated road sub-segments of WiFi APs,such that we do not necessarily locate a bus from scratch, andshow that the proposed framework can be applied for locatingunknown WiFi APs surrounding the bus roads, and indoorlocalization as well. We implement the prototype of WiLocatorand WiLocator(p), and conduct the in-situ experiments to showtheir efficiency in bus tracking.
Manuscript received January 10, 2018; accepted February 28, 2018. Dateof publication March 8, 2018; date of current version May 9, 2018. Thiswork was supported in part by the National Natural Science Foundationof China under Grant 61672213, Grant 61732017, Grant 61572219,Grant 71671060, Grant 51479157, Grant 61271226, and Grant 61202460,in part by the China Postdoctoral Science Foundation under Grant2014M552044, in part by the Fundamental Research Funds for the CentralUniversities under Grant WUT:2016III028, in part by the Excellent Young andMiddle-Aged Scientific and Technological Innovation Team for Universitiesin Hubei Province under Grant T201714, and in part by the Science andTechnology Plan Projects of Wuhan City under Grant 2017050304010325.The associate editor coordinating the review of this paper and approving it forpublication was Dr. Roozbeh Jafari. (Rui Zhang and Wenping Liu contributedequally to this work.) (Corresponding authors: Yufu Jia; Guoyin Jiang.)
R. Zhang is with the Hubei Key Laboratory of Transportation Internetof Things, School of Computer Science and Technology, Wuhan Universityof Technology, Wuhan 430070, China, and also with CICCPREA-HubeiSub-Center, Hubei University of Economics, Wuhan 430205, China.
W. Liu is with the School of Information Management and Statistics, HubeiUniversity of Economics, Wuhan 430205, China, and also with CICCPREA-Hubei Sub-Center, Hubei University of Economics, Wuhan 430205, China.
Y. Jia and J. Xing are with the School of Information Management andStatistics, Hubei University of Economics, Wuhan 430205, China (e-mail:[email protected]).
G. Jiang is with the University of Electronic Science and Technologyof China, Chengdu 611731, China, and also with the CICCPREA-HubeiSub-Center, Hubei University of Economics, Wuhan 430205, China (e-mail:[email protected]).
H. Jiang is with the College of Computer Science and ElectronicEngineering, Hunan University, Changsha 410082, China.
J. Liu is with Simon Fraser University, Burnaby, BC V5A 1S6, Canada.Digital Object Identifier 10.1109/JSEN.2018.2813983
Index Terms— WiFi sensing, Voronoi diagram, bus tracking.
I. INTRODUCTION
URBAN is where most of the important transportations(such as airports and rail yards, etc.) terminate, making
the urban transit crucial to efficiently support the mobility ofpeople and freight. For instance, in 2014 alone, Americanpeople (most of them are young) took about 10.8 billiontrips on public transportation, and, around 70% of populationof Mexico takes public transportation. As such, the habitualmobility of people gives rise to the recent observation thatthe urban productivity highly depends on the pubic transportsystem. In this paper we focus on one type of the pubictransport system, the bus system, as it covers the majority ofthe urban road network, compared with other transport modessuch as skytrain or subway. For instance, in London, about75% road segments are covered by bus systems, and 79%in Singapore, and around 85% of residents have a bus stopwithin 400 meters of their home in a metropolitan of NorthAmerica. It is noted that the bus system suffers more fromtraffic jam, especially in rush hours. A long waiting time fora bus clearly discourages people to take bus for commute,shopping, etc. The information, if available, of where the busis and when it will get the intended stop, no doubt can cutdown the waiting time, and thus increase the efficiency of busriders [29], which in turn appeals more and more people totake bus transportation, and thus benefits the transit agenciesfrom offering the services of real-time tracking and arrivaltime prediction. In summary, offering the services of real-timetracking and arrival time prediction is a common welfare forboth bus riders and transit agencies.
To provide these services, many transit agencies (e.g., TTC1
and CTA,2 etc.), or third-party companies (e.g., NextBus),3
have commonly equipped each bus with a GPS-enabledin-vehicle device (so-called Automatic Vehicle Locator).Unfortunately, the adoption of GPS based tracking and arrivaltime prediction in real world has been stymied by theGPS-based device’s well-known limitations on energy con-sumption, requirement of sky visibility, initial and incurringcosts which prohibit the applicability for small-scale transitagencies, and so on. Even though more powerful GPS-enableddevices are available without suffering from these limitations,the costs to setup and maintain the devices are huge, especially
1http://www.ttc.ca.2http://www.chicagobus.org/news/bus-tracker-expands-systemwide.3http://nextbus.cubic.com.
1558-1748 © 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

ZHANG et al.: WiFi SENSING-BASED REAL-TIME BUS TRACKING AND ARRIVAL TIME PREDICTION 4747
Fig. 1. The motivated example on a road segment of a main street inMetro-Vancouver, Canada. The geo-tagged WiFi APs (with their latitudesand longitudes marked in Google Maps) are densely distributed along theroad where multiple bus routes share a few overlapped road segments, andthere are only a small number of cell towers, each of which covers multipleroad segments.
for bus companies in developing countries. An alternativeapproach relies on cellular infrastructures [24], [30], [31],[45]–[47]. However, the long capturing time for a stableCell-ID sequence, overlapped road segments of differentroutes, low density of cell tower, etc., make the cellular-basedapproaches a poor fit for real-time bus tracking.
WiFi Access Points (APs), on the other hand, are nowdistributed densely along the road segments of the urban busroutes. Fig. 1 gives a glance of WiFi hotspot distribution ina big city of north America. It’s well-known that the noisyRSS readings entail substantial challenges for positioning. Forinstance, the existing WiFi-based localization systems eitherrely on fingerprinting received signal strength (RSS) [3], [4],[6], [11], [12], [25], [27], [41], [42], [44], or signal propagationmodels [7]. However, the calibration for fingerprint databaserequires intensive labors from experts in-house, and alsosuffers from the dynamics of WiFi APs due to reconfigura-tion or replacement, etc., while the radio-frequence (RF) prop-agation model-based schemes hurt seriously the positioningaccuracy.
Observing that the average RSS rank from an APsensed by multiple devices remains relatively stable, in thispaper, we present a powerful tool, named Signal VoronoiDiagram (SVD), to partition the signal space into coarse-grained Signal Cells (SCs), within each of which the pointsreceive the strongest signal from the same AP (referredto as the site or generator), and then into fine-grainedSignal Tiles (STs). Within each ST, the rank of RSSreadings remains constant. On top of SVD, we exploitthe mobility constraint of a bus route and the temporalconsistency of travel time of buses on overlapped roadsegments, and design a novel and energy-efficient framework,so-called WiLocator, to real-time track and predict the arrivaltime of the bus in urban environments. We also presentWiLocator(p), a variant approach of WiLocator, to track a busby computing the dominated road sub-segment for each WiFiAP based on the crowd-sensed historical data. Compared withWiLocator, it has a shorter computation delay and higher
positioning accuracy while requiring an offline learningphase.
WiLocator and WiLocator(p) consist of three components:(1) WiFi-enabled commodity off-the-shelf (COTS) smart-phones, carried by the driver and bus riders for crowdsensing. The smartphone periodically scans the surroundingWiFi information, and reports it to the server; (2) a back-endserver (we shift the computation burden to the server,including SVD construction in WiLocator or dominatedsub-segment computation in WiLocator(p), real-time bustracking, arrival time prediction, traffic map generation andanomalies detection); (3) a user interface for trip plan, suchthat the real-time bus track and schedule, and the traffic map,can be readily available for intended bus riders.
In summary, we make the following contributions:• We propose a powerful tool, the Signal Voronoi
Diagram generated by WiFi APs, to divide a signal spaceinto coarse-grained Signal Cells and fine-grained SignalTiles, tackling the unstable WiFi signals;
• We exploit the SVD, the mobility constraint of a bus,and the temporal consistency of travel time of the buseson the overlapped road segments, and design WiLocator,a WiFi-sensing based framework for real-time bus track-ing and arrival time prediction;
• We introduce a variant of WiLocator, namedWiLocator(p) which utilizes the historical data ofbus location information for constructing dominated roadsub-segments of WiFi APs, such that we do not need tolocate a bus from scratch. We also show that the SVDcan be applied for locating WiFi APs with unknowngeo-tags, and indoor localization as well.
• We present a novel scheme to report anomalies (if any),and generate the real-time traffic map by analyzing thestatistical behaviors of the travel time on each roadsegment, instead of the vehicle velocity subjecting todifferent speed limits on different road segments;
• We implement a prototype of WiLocator and WiLoca-tor(p), and conduct the in-situ experiments to show theefficiency of bus tracking and arrival time prediction.
The rest of the paper is organized as follows. We present thebackground and motivations in Section II, and in Section III,we describe the principle of the signal Voronoi diagrambased bus positioning technique. Section IV is devoted to theapplications for arrival time prediction and real-time trafficmap generation. We present the prototype implementation andexperimental results in Section V, and discuss the issues oflocating unknown WiFi APs and indoor localization based onthe SVD in Section VI. In Section VII we briefly introduce therelated work. Finally, we conclude the paper and present thefuture work in Section VIII.
II. BACKGROUND AND MOTIVATIONS
As mentioned earlier, several transit agencies and third-party companies offer the services of real-time bus trackingand arrival time prediction by installing GPS-enabledAVL devices. However, equipping each bus with an AVLdevices potentially incurs overwhelming initial and recurring

4748 IEEE SENSORS JOURNAL, VOL. 18, NO. 11, JUNE 1, 2018
costs [29], which renders this solution prohibitive for practice,especially for many small transit agencies operating only afew buses. As such, Biagioni et al. [5] presented EasyTracker,an automatic bus tracking and arrival time prediction systemon a COTS smartphone, carried by the driver or installed inthe bus. Unfortunately, GPS is power-hungry, and the GPS-based tracking systems including EasyTracker work poorlyin urban environments due to the city geometry (or so-calledurban canyons): the high buildings, or tunnels, will blockthe line-of-sight (LOS) paths to the satellites. The existingenergy-accuracy tradeoff triggers the development oflightweight positioning systems, which either reduces theaccuracy requirements down to an acceptable limit, or turnson and off GPS based on some clues, or both [8], [19],[23], [24], [45]–[47]. For instance, in [24] and [45]–[47],the location is computed based on Cell-ID sequence matching.Though energy-friendly, they can not efficiently handle thecase of overlapped road segments, and suffer from the lowdensity of cell tower and long capturing time for a stableCell-ID sequence for matching.
Nowadays, geo-tagged WiFi APs, with their latitude andlongitude marked in Google Maps, are widely visioned inmodern metropolitans: hotels, restaurants, and so on. As WiFinetwork is viable for alleviating cellular congestions andenhancing the quality of service (QoS) [13], it has already beenexploited for data offloading by mobile operators. We thusenvision that there will be an increasing trend of WiFi APsdeployment covering densely the majority of road networksin urban areas. Compared with other approaches, WiFi-basedbus positioning is attractive since, 1) there are already enoughWiFi APs with limited coverage due to the limited transmittedpower, in urban areas, which entails an accurate result basedon RSS readings from surrounding WiFi APs; 2) it only takeseveral seconds to retrieve the necessary WiFi information,such as SSID, BSSID and RSS, etc., around the road segments;3) it does not suffer from city geometry, and 4) there isno installation or maintaining fee for transit agencies as nocostly infrastructure investments are involved. Despite theseadvantages, the unstable WiFi signal, AP dynamics, and thecomplicated outdoor environments along the road segments,where existing WiFi-based location systems relying on calibra-tion by experts in-house or radio-frequency (RF) propagationmodel are inefficient, entail substantial challenges for bustracking. In this paper we propose the powerful tool, namedSignal Voronoi Diagram (SVD), to tackle these challenges.
In addition to the densely distributed WiFi APs in urbanenvironments, another key observation is that, different busroutes, e.g., route 9, 14, 16 and a Rapid Line in Fig. 1 mayshare a few overlapped road segments connecting adjacentintersections/terminals. The experimental evidence shows thatthe travel pattern (e.g., normal, faster or slower as comparedwith the historical travel time) of different bus routes on thesame road segment exhibits high temporal correlation: if abus A has just travelled by a road segment with a normaltravel pattern, then the travel time of next bus B , despite itsroute, on this road segment will also be normal with highprobability, even though their regular speeds on this segmentmay differ. Clearly, the travel time of previous buses on the
shared road segments is most timely and thus capable foroffering an accurate travel time estimation of the upcomingbuses. As such, by leveraging the travel patterns of buseshaving just passed by the intended road segment, we canaccurately estimate the travel time of the upcoming buses onthis road segment, and its arrival time at subsequent stops.
Motivated by these facts, in this paper, we aim to track andpredict the arrival time of a bus in urban areas by participa-tory crowd-sensing based on WiFi-enabled smartphones, anddesign the cost-effective, user-friendly and reliable systems,named WiLocator and WiLocator(p), requiring the minimuminterference of participants, i.e., zero effort from the bus riders.WiLocator(p) requires an offline learning phase based onhistorical data such that it can yield the shorter time delay,as compared with WiLocator which requires the system tostart from scratch for bus tracking.
III. SIGNAL VORONOI DIAGRAM
BASED BUS POSITIONING
A. Signal Voronoi Diagram
Voronoi diagram (VD), also known as Voronoi tessellation,is the partition of a plane into regions, called Voronoi cells,based on the distance to the points (referred to as seeds,sites, or generators) of a finite set [2]. Formally, given apoint set S = {p1, p2, · · · , pn}, the dominance of pi overp j (i �= j) is defined as the sub-plane not farther to pi thanto p j . Formally,
dom(pi , p j ) = {x ∈ R2|d(x, pi) ≤ d(x, p j )} (1)
where d(x, y) denotes the Euclidean distance between x and y.The Voronoi cell generated by pi , denoted by c(pi), is thusdefined as the sub-plane in the dominance of pi over all othersites. That is,
c(pi) = ∩ j=1,2,··· ,n, j �=idom(pi , p j ) (2)
Ties are allowed here and the intersection of two neighboringcells c(pi), c(p j )(i �= j), where the points are equidistant topi and p j , form a Voronoi edge e(pi , p j ), and two Voronoiedges meet at the junction point. The collection of theseVoronoi cells generated by the sites in S, forms a partition,i.e., the Voronoi diagram, of the plane, denoted by V D(S).
Definition 1: Given a WiFi AP set P = {p1, p2, · · · , pn}in a space D, the Signal Voronoi Diagram of D, denotedby SV D(D), is a partition of D into a set of Signal Cellsbased on RSS(x, pi ), the signal strength at point x , whereeach cell SC(pi )(i = 1, 2, · · · , n) is the dominance of pi
over other APs such that SC(pi ) = {x ∈ D|RSS(x, pi ) ≥RSS(x, p j ), j = 1, 2, · · · , n, j �= i}. The Signal VoronoiEdge (SVE) between pi and p j , denoted by SV E(pi , p j ),is a point set such that SV E(pi , p j ) = {x ∈ D|RSS(x, pi ) =RSS(x, p j )}. We call the point where two or more SVEs meetas a joint point.
In what follows, we will use interchangeably the terms ofAP and site. It can be seen that the SVD differs from the VD inthat the metric here is the RSS of the point from the APs,instead of the Euclidean distance as in [17], [25], and [28].

ZHANG et al.: WiFi SENSING-BASED REAL-TIME BUS TRACKING AND ARRIVAL TIME PREDICTION 4749
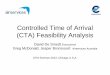
Fig. 2. SVD and its application for bus positioning. The WiFi APs,namely, a, b, c, d and e around the road segment ei generate the SVDwhere the solid lines represent SVEs; Signal Cell SC(b) is partitioned intofour STs. Points s, p, q and q′ are the intersection of road segment ei withthe SV E(b, d), the tile boundary of ST (b, d) ∩ ST (b, c), tile boundary ofST (b, c) ∩ ST (b, a) and SV E(b, a), respectively. The red star represents thecentroid of ST (b, d), and the bus location (indicated by the bus shape) isinferred by mapping the centroid to the road segment.
As in practice, many factors, such as transmit power, the envi-ronment, etc., affect the RF signal propagation, the SVE isnot necessarily a straight-line, making the VD inefficient forthis case; only in the ideal case where all of these parametersare equal for all APs will the SVD be the same as the VD.Therefore, the conventional Voronoi Diagram is just a specialcase of SVD. Fig. 2 gives some intuition for SVD.
Note that within each SC, the difference of RSS betweenother sites, instead of the site of this SC, is ignored. Forinstance, for any x ∈ SC(pi ), the relationship, or the rankorder, between RSS(x, p j ) and RSS(x, pk)(i �= j �= k) isunclear. To that end, we can further partition each SC intomore sub-regions of finer granularities, say, Signal Tiles (STs),which are defined as follows.
Definition 2: Given the Signal Cell SC(pi ) havingni neighboring SCs with sites Pi = {pn1, pn2, · · · , pni }(n j �= i, j = 1, 2, · · · , i) ⊆ P, a Signal Tile ST (pi , pn j )( j = 1, 2, · · · , i) of SC(pi ) is defined as the dominance ofpn j in SC(pi ) over other sites in Pi . That is, ST (pi , pn j ) ={x ∈ SC(pi )|RSS(x, pn j ) ≥ RSS(x, pnk ), k = 1, 2, · · · , i,k �= j}, or ST (pi , pn j ) = {x ∈ D|RSS(x, pi ) ≥RSS(x, pn j ) ≥ RSS(x, pnk ), k = 1, 2, · · · , i, k �= j} whereat least one inequality holds as the Signal Tile is not empty.
In particular, we call the intersection of two neighboringSTs as a Tile Boundary, and the intersection of two or moretile boundaries as a Bisector Joint (see Fig. 2). Clearly,the collection of the STs in each SC then form a finerpartition of D, i.e., the second-order SVD, and thus each STis also called as a second-order Signal Cell. We can derivethe higher-order SVD by similarly conducting the partitionprocess for each Signal Tile SC(pi ) until it’s decomposedinto ni ! finest Signal Tiles ST (pi , pn′
1, pn′
2, · · · , pn′
i) which
are no longer dividable based on the available RSS vector,where (n′
1, n′2, · · · , n′
i ) is a permutation of (n1, n2, · · · , ni ).Proposition 1: For any x ∈ ST (pi , pn′
1, pn′
2, · · · , pn′
i),
the following inequality holds: RSS(x, pi ) ≥ RSS(x, pn′1) ≥
RSS(x, pn′2) ≥ · · · ≥ RSS(x, pn′
i). That is, the RSS values
are ordered within each ST.
It’s well-known that the RSS readings are very unstable:even in a static point it can vary up to more than 10 dB, makingthe RSS readings less important. However, the ranks of theRSS from different APs are relatively stable, and according toPropositon 1, we can easily infer the location range of a mobiledevice, i.e., the ST it’s in, based on its collected RSS vectorfrom the surrounding WiFi APs, and estimate its locationas the centroid of the ST (e.g., the star in Fig. 2 when theRSS readings from AP b and d are the strongest and second-strongest respectively). Note that here no calibration or RFpropagation model is required. Clearly, the accuracy of rank-based positioning depends on the size of ST that the deviceresides in, which is subject to the WiFi AP density, and theorder of SVD. As such, we have the following propositions:
Proposition 2: A higher-order SVD based positioningscheme will provide a more accurate result.
Proposition 3: The SVD constructed based on more APswill ofter a higher positioning accuracy.
With these features, next we will apply the constructed SVDfor WiFi-sensing based real-time bus positioning.
B. WiLocator: Signal Voronoi Diagram BasedBus Positioning
As mentioned before, there are densely distributed geo-tagged WiFi APs along the road segments of bus routes, whichare sufficient to construct the SVD with small-sized STs foran accurate position. However, generally the SVD alone cannot pinpoint the bus position. For instance, in Fig. 2, if the APsequence according to the RSS rank list is (b, d, a), then weinfer that the current bus position falls within the Signal CellSC(b), or more precisely, the Signal Tile ST (b, d). However,the ST’s centroid might be far from the ground truth whichshould be on the road segment. Note that a bus will followa regular route, which can be readily downloaded from thewebsite of the transit agency. With this mobility constraint,we can narrow down the bus position estimation to the roadsegment in the road network, which is defined as follows.
Definition 3 (Road Network): A road network is a directedgraph G(V , E) where V is the set of vertices correspondingto the intersections and road terminals, and the edge set Edenotes the collection of directed road segments between twoadjacent vertices vi .star t and vi .end, 1 ≤ i ≤ |V |.
Definition 4 (Bus Route): A bus route R is a sequence ofconnected and directed road segments e1 → e2 · · · → en
where the start stop s1 and final stop sn lie on e1 and en,respectively, and ei .end = ei+1.star t, 1 ≤ i < n.
Please see Fig. 3 for some intuition. To derive the busposition, we define a Tile Mapping4 from the STs to thecorresponding road segment as follows:
Definition 5: Let ST (pi , pn j ) be the Signal Tile that the buscurrently resides in, and ei j be a sub-segment, in ST (pi , pn j ),of road segment ei . We define the Tile Mapping F :ST (pi , pn j ) → ei j as F(ST (pi , pn j )) = pi j where pi j isthe nearest point of the centroid of ST (pi , pn j ) to ei j .
As such, based on the second-order SVD that divides a roadsegment into short sub-segments, we first determine which ST
4In practice, we find that a second-order SVD is enough for a high accuracy.

4750 IEEE SENSORS JOURNAL, VOL. 18, NO. 11, JUNE 1, 2018
Fig. 3. Road network and bus routes (indicated by the number).
Fig. 4. The computation of the positioning error of a bus on a road segment.
the bus is in, and then map this ST to the road sub-segmentinside the ST to infer the bus position. For instance, in Fig 2,if the RSS rank list is (b, d, c), then the bus location is inferredto be a point (indicated by the bus shape) on the sub-segmentbetween p and s, and between q and q′ for the rank list(b, a, c). When there are more APs, the positioning result willalso be more accurate, as each SC can be decomposed intomore STs, and thus the road segment within each ST can bedivided into shorter sub-segments.
On the downside, due to the noisy RSS readings, the busmight be mistakenly estimated to reside in a ST, e.g., ST (b, e)in Fig 2, which has no intersection with the road segment.In this case, we simply map this ST to the nearest point onthe road sub-segment that intersects with one neighboring ST,and then the bus position can be inferred in above way. Forinstance, we can map the centroid of ST (b, e) to the roadsub-segment between p and s.
Note that there can be equal ranks of RSS values fromdifferent APs, and in this case the position estimation is mucheasier. In Fig. 2, if rank of a (or d) equals to that of b,then q′ (or p) will be the estimated position. And if RSSranks from a, b, c are equal, theoretically the junction point o,where SV E(a, b) and SV E(a, c) meet, is the best estimation.However, the bus must travel on the road segment, thereforewe project the junction point o to the road segment ei , andregard the projected point as the estimated bus position. Let(xg, yg) and (xe, ye) be the ground truth and the estimatedlocation of the bus. We define the positioning error as theroad length between (xg, yg) and (xe, ye) along the road, e.g.,error = |xg − xe| in Fig. 4. The rationales behind this arethat 1) it’s non-trivial to determine which lane the bus in, and2) the difference across lanes can be ignorable for an intendedbus rider in practice.
Fig. 5. An experiment scenario. The noisy reading by GPS is mapped to thetrue location of bus on a one-way road segment. The WiFi APs are numberedand the lines represent the Voronoi edges of SVD generated by the APs.The locations A, B, C are ground truth of the bus position by GPS, and theestimated locations are marked by the yellow bus shapes.
TABLE I
THE RSS READINGS FROM SURROUNDING WIFI APS AT DIFFERENT
LOCATIONS OF FIG. 5 IN THE SFU CAMPUS
Occasionally, there can be dynamics of WiFi APs, e.g.,due to their being out of function, replacement, etc., but ourSVD-based positioning algorithm does not suffer from suchdynamics. For instance, in Fig 2, suppose that the AP b is outof function. The surrounding WiFi APs are now becominga, c, d and e, and the SVD changes accordingly where theSignal Voronoi Edges SV E(b, a), SV E(b, c), SV E(b, d)and SV E(b, e) do no longer exist. Other SVEs,i.e., SV E(a, c), SV E(a, e), SV E(c, d) and SV E(c, e),and the dashed tile boundary of STs in SC(b), together formthe new SVEs with the bisector joint (indicated by the emptyrectangle) as the junction point of the new SVD. We canfurther construct the second-order SVD, and in a similar waydescribed above we can infer the bus position based on theranks of RSS from the available APs. One can imagine thatthe newly estimated position will not be far away from thetrue location.
To show how the SVD-based positioning approach works,we conduct an experiment on a road segment in the campusof Simon Fraser University (SFU) where the deployment ofWiFi AP is almost as dense as in the urban environments.We measure the RSS from the surrounding WiFi APs whenthe riding bus passes different locations, namely A, B and Cmarked in Fig. 5, and the results are shown in Table I. Thebus runs at a speed of 10 km/h around. Accordingly, we rankthe RSS values and construct the second-order SVD based onthe ranks. The errors of location A, B and C are 2m, 2m and2m respectively, and the average error is thus only 2m.
Now We assume that AP 4 is temporally out of functionwhich thus incurs an AP dynamic. As a result, the constructed

ZHANG et al.: WiFi SENSING-BASED REAL-TIME BUS TRACKING AND ARRIVAL TIME PREDICTION 4751
Fig. 6. The impact of AP dynamic on SVD-based bus positioning accuracy.The AP 4 is temporally out of function, while the RSS readings from otherAPs at location C remain the same as in Fig. 5.
SVD is different with the SVD in Fig. 5. Fig. 6 depictsthe SVD-based positioning result when the bus is actually atlocation C . We found that the positioning error is about 1.8m,showing that the proposed approach is robust to AP dynamic.
With the estimated bus position and a time stamp indicatingthe time of WiFi sensing, we derive a trajectory of the bus.
Definition 6 (Trajectory): A bus trajectory is a sequence oftuples < lat, long, t > representing the latitude, longitudeand the time stamp, respectively.
C. WiLocator(p): A Variant of WiLocator
WiLocator requires the system to start from scratch everytime for locating a new bus, which involves SVD constructionand signal tile mapping, and thus incurs a time delay forcomputation. In this subsection, we show that by exploitingthe historical positioning information related to each WiFi AP,we can reduce the computational delay of bus positioning.As such, we design a variant approach of WiLocator, namedWiLocator(p). Note that within each SC of a SVD, there existsa road sub-segment where the rank of the RSS readings fromthe site is the largest. We call this road sub-segment as adominated road sub-segment by this site. That is,
Definition 7: A dominated road sub-segment on ei by anAP p j ( j ∈ J ) where J is the index list of APs, denoted bydom(p j , ei ), is such that for each point x on this sub-segmentthe inequality RSS(x, p j ) ≥ RSS(x, pl)(l ∈ J, l �= j) holds.Similarly, we can define a dominated road sub-segmentinduced by a higher-order SVD as follows.
Definition 8: A dominated road sub-segment on ei bypn1, pn2, · · · , pnk (n j ∈ J, j = 1, 2, · · · , k), denoted bydom(pn1, pn2, · · · , pnk , ei ), is such that for each point xon this sub-segment the inequality holds RSS(x, pn1) ≥RSS(x, pn2) ≥ · · · ≥ RSS(x, pnk ).
With the dominated sub-segments, we can yield a hierar-chical decomposition of any road segment,5 where each sub-segment is dominated by a WiFi AP. After the hierarchical
5That is, the following relationship holds: dom(pn1 , pn2 , · · · , pnk , ei ) ⊂dom(pn1 , pn2 , · · · , pnk−1 , ei ) ⊂ dom(pn1 , ei ).
Fig. 7. An illustration of bus positioning by WiLocator(p). The solid circlesand the diamonds on segment ei represent the locations receiving the strongestsignal from AP d and AP b, respectively.
decomposition, WiLocator (p) adopts two phases for bustracking: model learning and bus positioning.
1) Model Learning: In this stage, we determine the domi-nated sub-segments by the surrounding WiFi APs in a crowdsensing fashion. Please see Fig. 7 for some intuition. Eachtime when a bus travels from p′ to p on the road segment ei ,with the collected RSS readings we can compute the locationof the bus by WiLocator. With enough number of experimentsconducted for bus positioning, we can derive a set of locations(or points) where the RSS readings from an AP (e.g., d) havethe highest rank as compared with other APs. These points arethen merged and form a sub-segment dominated by the AP.
Note that due to the noisy readings, some points(e.g., the solid circle on sub-segment ps) may locate outsidethe sub-segment pp′ while the RSS rank of AP d is stillthe largest. We apply a vote policy to remove these points.Concretely speaking, if the majority of the neighbors6 ofa point resides in the same sub-segment but the 1st rankcorresponds to different APs, we remove this point fromcomputing the dominated sub-segment. As a result, for eachAP, we can generate a dominated sub-segment based onthese sampled locations. In a similar way we can derive thedominated sub-segments with finer granularities based on thehigher-order SVD.
2) Bus Positioning: Upon receiving the request for locatinga bus, the server determines which dominated sub-segment thebus is runnig on, according to the ranks of the recorded RSSreadings, and simply regards the mid-point of the dominatedsub-segment as the location of the bus.7 Clearly, for a higher-order SVD the dominated sub-segments are shorter than thoseinduced by a lower-order SVD, and thus the bus positioningaccuracy based on a higher-order SVD tends to be higher.
It is noted that compared with WiLocator, WiLocator(p)requires a learning phase which utilizes the historical position-ing information related to each WiFi AP. Paying this additionalcost for model learning, we can cut down the time delayfor bus positioning and thereon the arrival time prediction.
6A neighbor of a point x is defined as a point with distance less than thegiven threshold to x .
7We can also dead-reckoning techniques for bus tracking where the IMUsensors are involved.

4752 IEEE SENSORS JOURNAL, VOL. 18, NO. 11, JUNE 1, 2018
Another advantage of WiLocator(p) over WiLocator is thatit’s higher positioning accuracy as it exploits the historicaldata. However, when there is no historical data available,WiLocator(p) is no longer valid and in this case, we adoptWiLocator for bus positioning.
IV. BUS ARRIVAL TIME PREDICTION AND
REAL-TIME TRAFFIC MAP GENERATION
In this section, we detail the applications of SVD-basedbus positioning for arrival time prediction and traffic mapgeneration. Note that the buses with the same consecutivestops generally share overlapped road segments, while thebuses sharing the same overlapped road segments do notnecessarily have the same stops. As such, our scheme is builton road segments, with an advantage of leveraging more latelytravel time of buses with the same/different routes to predictthe arrival time, over other solutions [46], [47] that only use thedata of the same route. To that end, we first fetch the historicaland lately travel time on each overlapped road segment ofthese bus routes, and then summarize these travel times toestimate the arrival time of a bus at the subsequent stops.
Let us take Fig. 3 as an example where the current buslocation of route 1 is marked by the empty circle, and the soliddiamonds represent the subsequent stops of the bus route 1.After locating the bus, we find out whether there are busessharing the overlapped road segments between the currentlocation and the intended stop(s), and estimate the travel timefrom current position to the end of current road segment, andto subsequent road segments, based on the historical and latelydata of these routes (if there are other routes sharing road seg-ments with route 1). On current road segment e1, where onlybuses of route 1 travel, the historical and lately (if any) data ofroute 1 is used since there is no bus of other routes travelingon e1. Later, we find there are two routes, namely, route 1 and 5share segment e2; if buses of route 1 and 5 have just passedby e2, we can use the historical data of route 1 and 5,and their up-to-data travel time to estimate how long the nextbus of route 1 will take to travel along this road segment e2.Next we only focus our concentration on estimating the traveltime of a bus route on a single road segment.
Specifically, suppose that there are K (> 1) bus routesR1, R2, · · · , RK sharing the same road segment ei . To predictthe travel time of an upcoming bus, say of route R1, on ei ,we suppose that most recently there are J buses of K ′(≤ K )routes passing by ei . We denote by Th(i, j), Tr (i, j) the histor-ical and recent travel time of bus j ∈ (1, J ), respectively. Notethat many factors affect the travel time: weather condition,driving style, the number of boarding and alighting passengers,whether there is a stop on the road segment, and unexpectedaccidents, to name a few. Incorporating all these factors into amodel would result in a time-expensive computation of themodel. Instead, we classify them into two categories: busroute-dependent and environment-related factors. The formerone is related to each bus route, while the latter is shared by allroutes on the same road segment, which is often uncontrollableby any bus route and thus we model it as a random variable εi
following a Gauss distribution N(μi , σ2). Thus, the travel time
of route j on ei can be formulated as
Tr (i, j) = μi, j + εi (3)
where μi, j is the mean of the travel time of route R j on roadsegment ei , which can be unbiasedly estimated as Th(i, j),i.e., E(Th(i, j)) = μi, j where E() denotes the expectation,for a large number of historical data. Thus, Equation 3 can berewritten as
Tr (i, j) = Th(i, j) + ε̂i (4)
where the residual ε̂i is an unbiased estimator of εi , namely,E(ε̂i ) = μi . Then, the travel time of route R1 on roadsegment ei in the near future can be estimated as
Tp(i, 1) = Th(i, 1) +∑
j=1,··· ,J {Tr (i, j) − Th(i, j)}J
(5)
where the second item in the right side is an estimation of ε̂i .Typically, there are two significant rush hours in a weekday,
one in morning and one in afternoon, incurring a largevariation σ 2 caused by the environment-related factors. Hence,we can divide a weekday into serval time slots, for instance,morning non-rush hour, morning rush hour, afternoon non-rush hour, afternoon rush hour, and otherwise, and estimate theaverage historical travel time of each bus route. Then, withineach time slot, we build a prediction model in a similar way.
It is noted that the rush hour may appear at different time fordifferent node segments. To that end, we need to figure outfor each node segment when the rush hour is based on thehistorical data by computing the so-called seasonal index,a metric to determine whether there is a seasonal cycle (or,periodicity) of an economic phenomena in statistics. Assumethat each day is divided into L time slots, e.g., each hour isa time slot, and we have an M-day observation of bus traveltime. During each day m(1 ≤ m ≤ M), for each bus routeR j (1 ≤ j ≤ K ) on road segment ei (1 ≤ i ≤ n), at timeslot l(1 ≤ l ≤ L), the travel time is denoted by T (i, j, m, l).Let T̄ (i, ·, ·, l) denote the average travel time of all routes onroad segment ei at time slot l, and T̄ (i, ·, ·, ·) be the wholeaverage travel time with respect to the day and time slot.
That is, T̄ (i, ·, ·, l) =∑
m=1,··· ,M, j=1,2,··· ,K T (i, j,m,l)M K , T̄ (i, ·, ·, ·) =∑
, j=1,2,··· ,K ,m=1,··· ,M,l=1,··· ,L T (i, j,m,l)M K L . The seasonal index of time
slot l, denoted by SI (i, l) is thus defined as
SI (i, l) = T̄ (i, ·, ·, l)
T̄ (i, ·, ·, ·) (6)
Clearly, we have∑
l=1,··· ,L
SI (i, l) = L, SI (i, l) > 0 (7)
If SI (i, l) = 1 for any l ∈ [1, m], there is no periodicity oftravel time; if SI (i, l) � 1, showing that the travel time ismuch longer compared with the average level, then the timeslot l might be a rush hour. We can group consecutive timeslots with similar seasonal index into a bigger slot such thateach day can be divided into less slots, to increase the sample

ZHANG et al.: WiFi SENSING-BASED REAL-TIME BUS TRACKING AND ARRIVAL TIME PREDICTION 4753
Fig. 8. The implementation diagram of WiLocator.
size for predicting the arrival time. Then, for any time t oftime slot l, we can rewrite Equation 5 as:
Tp(i, j, t) = Th(i, j, l) +∑
k=1,··· ,K {Tr (i, k, l) − Th(i, k, l)}K
(8)
Assume that at a time t within a time slot l, the bus ofroute j is currently on position a of segment ei , the arrivaltime at stop sn on segment en(n > i + 1) is estimated as
Te(s j ) = Tp(i, j, t)dr(p, ei .end)
dr (ei .star t, ei .end)+
n−1∑
k=i+1
Tp(i, j, t)
+ Tp(n, j, t)dr(sn, en .end)
dr (en.star t, en.end)(9)
where dr (x, y) denotes the road length between x and y. Forn = i + 1, the middle term of right side in Equ. 9 is ignored.When the intended road segment or stop is far away fromcurrent position such that the arrival time might fall in anothertime slot, the computation will be separated slot-by-slot.
V. PROTOTYPE IMPLEMENTATION AND
EXPERIMENT RESULTS
A. Prototype Implementation
In this section, we only concentrate on the system design ofWiLocator as WiLocator(p) is an extension of WiLocator withadditional two phases of model learning and bus positioning.WiLocator consists of three main blocks, namely WiFi-basedbus positioning, arrival time prediction, and traffic map gen-eration, corresponding to three components for data sensing,processing and applications, as shown in Fig. 8.
• SVD-based Bus Positioning. We assume that the busroute can be easily identified, e.g., based on voice recog-nition of the announcement by riders or text input bythe driver. The smartphones of the driver and bus ridersthen periodically scan available WiFi, and report the WiFiinformation to the back-end server. The server then con-structs the Signal Voronoi Diagram (SVD) according tothe average rank of RSS values from each of surroundingWiFi APs; by leveraging the mobility constraint of thebus, the server yields an estimated position.
• Arrival Time Prediction. For each subsequent roadsegment of a bus on its route, we leverage the historicaland lately travel time of the buses of the same/differentroutes traveling on this segment to estimate the travel timeof next bus on this road segment, and then the arrival timeof the bus at the subsequent stops can be easily computedbased on the estimated travel time on each road segmentwhere a simple interpolation technique might be needed.
• Traffic Map Generation. Since different road segmentsmay pose different speed limits, instead of using thevehicle velocity, we analyze the statistical behavior of thetravel time on each road segment to generate a real-timetraffic map and report the traffic anomalies if any.
Note that in WiLocator, the computation burden is shiftedto the server, and no interference from the driver/riders isrequired. Next we will detail the prototype implementationof WiLocator, followed by the experimental evaluation.
1) Bus Route Identification: The first step of WiLocatoris to identify the bus route. The Cell-ID matching basedscheme [46] can not correctly classify the bus route whenthe first few road segments overlapped with other routes,quite common in urban areas, and thus the arrival time ofthe stops on these road segments is hardly available. In fact,nowadays, when the bus starts, it usually announces the busroute, including the route and the destination it bounds for.Thus we can easily extract the route information and where itbounds for based on the voice recorded by riders’ smartphones.On the downside, since we assume that each driver carriesa smartphone installed WiLocator, the bus route can also besupposed to be known; the bus riders, close to the driverby proximity sensor, have approximately the same trajectory,therefore we can easily determine which bus the riders are on.
2) Real-Time Bus Tracking: The core of WiLocator is tolocate the bus instantly as follows. When the system starts,the smartphone periodically scans the surrounding WiFi infor-mation, including SSID, BSSID, and RSS, and upload them,together with a time stamp, to the back-end server. Afterreceiving the report, the back-end server ranks the RSS valuesand then construct the SVD to determine which SC the bus isin, followed by partitioning the SC into STs. With the routeinformation and the road map downloaded from the transitagency and Google maps, respectively, WiLocator maps theST which the bus resides in to the road sub-segment of thebus route, and therefore infers the location accordingly.
3) Arrival Time Prediction: WiLocator has two phases,namely offline training and online prediction for this task.
a) Offline training: For each road segment, the servercomputes the seasonal index based on the historical traveltime, and determine whether there is a periodicity. If so,the server will divide the day into time-slots, within each ofwhich the travel time of a bus route on this road segment isassumed to follow the same probability distribution.
b) Online Prediction: Based on the estimated positionand the time stamp, the server estimates its arrival time atsubsequent stops. First, it finds how many buses have travelledthe subsequent road segments and computes the travel time ofeach bus. To that end, we need to compute when a previousbus arrived at the start point of the road segment and when

4754 IEEE SENSORS JOURNAL, VOL. 18, NO. 11, JUNE 1, 2018
Fig. 9. Identification of intersections.
it left, since there might be a gap between the WiFi scanningtime and the arrival time at an intersection. Generally, thereare two cases: 1) the bus stopped at the end point of the lastroad segment, e.g., waiting for the traffic light turning green.For this case, the arrival time at the next road segment canbe easily approximated8; and 2) the bus went straightly fromroad segment ei−1 to another road segment ei when the bluetraffic light is on. In this case, we assume that the bus travelledsmoothly, i.e., at a steady speed, and use two locations, say Aon ei−1 and B on ei in Fig. 9, to approximate the arrival timeat the intersection, i.e., ei−1.end of segment ei−1. Specifically,let the travel time (i.e., the scanning period) between A, B bet (A, B), and the travel time from A to ei−1.end can then beapproximated as t (A,B)d(A,ei−1.end)
dr (A,B) . As a result, the arrival timeof each last bus at ei−1.end or ei .star t can be easily estimated.With these lately data on each road segment, the arrival timeof the next bus at subsequent stops can be estimated accordingto Equation 9.
4) Real-Time Traffic Map Generation: The traditionalapproach to generate a traffic map is based on the velocityof vehicle passing each road segment. However, this methodis somehow problematic since each bus route usually hasdifferent regular speed when traveling the same road segment.For example, a bus of a rapid transit line (e.g., the Rapid Linein Fig. 1) usually runs faster than ordinary buses (e.g., Route9,14, and 16 in Fig. 1); the results based on the data of rapidtransit line or an ordinary bus might be misleading. Besides,different road segment, e.g., near school zone or not, may posedifferent speed limits. As such, WiLocator generates the real-time traffic map based on the statistics of travel time of a buson each road segment, instead of the velocity.
Specifically, for each road segment, we determine the trafficcondition based on the current and historical travel time.If the current travel time is, say, c1 times the standarddeviation (STD), larger than the mean travel time, we markthis road segment as very slow; or c2(< c1) times STD larger,then we mark it as slow; otherwise, the road segment will bemarked as normal. This way, the real-time traffic map can begenerated.
When a road segment is marked as slow or very slow,WiLocator will further detect the root cause and identify thetraffic anomalies in the following way. For each trajectory(lati , longi , ti )(i = 1, 2, · · · , n) where (lati , longi) denotesthe bus position pi at time stamp ti , if there are two integers1 < k < m < n such that dr (pi−1, pi ) < δ, k < i ≤ m anddr (pi−1, pi ) > δ otherwise, we regard the location between pk
and pm as the anomaly site (e.g., the location between A and Bin Fig. 10) such as road construction, traffic accident, etc. Thesystem parameter δ is determined based on the historical road
8We can also use the built-in accelerometer sensor to trigger a WiFi scanningand upload the report to the server when the bus stops.
Fig. 10. An illustrative example of anomalies detection.
Fig. 11. The four bus routes (i.e., the Rapid line, 9, 14 and 16) inMetro-Vancouver, Canada. The terminals of different routes are marked bydifferent shapes.
TABLE II
INFORMATION OF THE FOUR INVESTIGATED BUS ROUTES. THEOVERLAPPED LENGTH INDICATES THE LENGTH OF THE
OVERLAPPED ROAD SEGMENTS SHARED WITH
ONE OR MORE OTHER ROUTES
distance during a scanning period on the corresponding roadsegment in the similar way as described above for determiningparameter c1 (or c2). Other possible cases causing a falseanomaly, such as the bus waiting for riders’ boarding at astop or traffic light turning green at an intersection, can beeasily identified based on the bus position.
B. Experiment Results
We implement a prototype of WiLocator and WiLocator(p)on Nexus 5 with the Android platform, and conduct experi-ments on the buses of routes 9, 14, 16 and the Rapid Line,mostly running on a main street in the Metro-Vancouver,Canada (see Fig. 11), and collect the real data of 3-weekperiod. Each bus route shares some overlapped road segmentswith at least one route. Please see Table II for the detailedinformation about the four routes. The WiFi scanning period isset to be 10 seconds by default. We construct the SVD and theninfer the position of a bus based on the recorded RSS readings.We obtain the geo-tags of WiFi APs from Google Map andShaw Go WiFi.9 During the SVD construction, the readingsfrom unknown APs (i.e., without geo-tags) are ignored whichhas little impact on the results as there are at least three geo-tagged APs distributed along each road segment of the mainstreets, and we simply regard that all the factors affectingsignal propagation are the same for APs, as the transmitted
9https://www.shaw.ca/wifi/hotspots/.

ZHANG et al.: WiFi SENSING-BASED REAL-TIME BUS TRACKING AND ARRIVAL TIME PREDICTION 4755
Fig. 12. The CDF of positioning errors (a) and arrival time prediction errors (b), and the mean prediction error against the number of bus stops (c).
Fig. 13. The positioning error vs. the number of WiFi APs (a) and the orderof SVD (b).
power of the WiFi APs is often limited and on-site survey istoo expensive. To compute the positioning error, we collect theWiFi signals at some fixed locations such that the ground truthcan be obtained, and the velocity of bus is 15 km/h aroundunless otherwise stated.
1) Bus Positioning Accuracy: Fig. 12 (a) shows the cumu-lative distributed function (CDF) of the positioning errors ofeach route by WiLocator. Despite the unstable WiFi signalscaptured by the mobile devices of bus riders, with sufficientWiFi APs along the road segments and the mobility constraint,WiLocator achieves a high positioning accuracy with themedian error of less than 3m, showing that the SVD ispromising for real-time bus positioning.
2) The Impact of Influential Factors: We first study theimpact of WiFi AP number and SVD order on the performanceof WiLocator. Fig. 13 (a) depicts the average positioningerror against the number of WiFi APs. We observe that withthe increasing of AP number, the positioning error decreasesslowly from 3.15m to 2.8m. This is because with more WiFiAPs, the road segments are divided into shorter sub-segments,which results in more accurate bus positions. Even thoughthese positioning results might not be very accurate for indoorsettings, it is sufficient for predicting the bus arrival timewith high accuracy as the bus usually moves much faster thanpeople in indoor spaces, implying that in practical, we do notrequire too many WiFi APs for bus tracking. In Fig. 13 (b),the positioning error does not change significantly when theoder of SVD increases, and 2-order SVD is often enough inour tested scenarios.
Next we examine the impact of bus velocity and WiFiscanning period on WiLocator and WiLocator(p). We conductan experiment on a main street of Wuhan city, China. Fig. 14describes the comparison performance of WiLocator and
Fig. 14. The comparison studies on the positioning error vs. the bus velocity(a) and WiFi scanning period (b).
WiLocator(p) under different bus velocities (see Fig. 14 (a))with the scanning period of 4 seconds and WiFi scanningperiods (see Fig. 14 (b)) with the bus velocity of 20 km/haround. From Fig. 14 (a) we observe that with the increasingof bus velocity, the captured WiFi signals tend to be moreinaccurate, resulting in the average positioning error increasingfrom around 2m to above 8m. When the scanning period variesfrom 2 seconds to 14 seconds, we find from Fig. 14 (b) thatthe average positioning error decreases, as a longer scanningperiod will lead to more stable WiFi readings and moreaccurate result. Also we observe that WiLocator(p) slightlyoutperforms WiLocator as it exploits the historical data whichfrom long run are more stable.
3) Arrival Time Prediction: We exploit the real data tocompute the seasonal index of travel time on each roadsegment, based on which we divide each weekday into 5 timeslots: <8:00AM, 8:00 AM-10.00 AM (morning rush hours),10:00AM-6:00PM, 6:00PM-7:00PM (afternoon rush hours),and>7:00PM. We are most concern the bus arrival timeprediction during rush hours, which is rather challenging.Fig. 12 (b) gives the CDFs of the arrival time prediction errorby WiLocator and the Transit Agency. The prediction erroris defined by the absolute difference between the true arrivaltime and the predicted arrival time. We observe that the errorsby WiLocator and the Transit Agency are comparable, exceptthat the Transit Agency produces the maximal prediction errorabout 800 seconds during the rush hours, while the maximumerror by WiLocator is 500 seconds. Fig. 12 (c) presents therelationship between the average arrival time prediction errorand the number of bus stops in rush hours.10 Note that for
10For comparison, here we only show the prediction errors of the first19 stops since the Rapid line has only 19 stops.

4756 IEEE SENSORS JOURNAL, VOL. 18, NO. 11, JUNE 1, 2018
Fig. 15. The traffic maps during a rush hour on W Broadway byWiLocator (a), the Transit agency (b) and Google Map (c).
the Rapid line, pairwise stops are separated farther away thanother routes, thus it suffers less from the traffic jam in theoverlapped segments, and achieves the lowest prediction error.As the farther away the bus stop, the more uncertainty, we findan increasing trend of the prediction error, but overall theresults are acceptable during rush hours, with the maximumerror of 210 seconds.
4) Traffic Map Generation: First, for each bus route R j onthe road segment ei , at time slot l, we compute the historical
travel time residual ε̂i,l =∑
j (Th (i, j )−Tr (i, j ))J , where J is the
number of buses having passed segment ei , to exclude theimpact of route-related factors, and compute the standardvariation of the residual σ(εi,l ). Then, when a bus of route R j
has just travelled a road segment, say ei , we compute thestatistic zi j = εi,l −E(εi,l )
σ (εi,l ). Based on the Rule of Thumb,
if zi j < −1.64, we mark the segment ei as “very slow”with 95% confidence, according to the Rule of Thumb; ifzi j < −1.00, we mark the segment ei as “slow”, otherwiseit’s normal.
Fig. 15 shows the traffic map by WiLocator, Transit Agencyand the Google Map. As can be seen, the traffic map by theTransit Agency has some unconfirmed segments, which is toour surprise, and the Google Map detects some true anomalies,such as the accident (leftmost) and traffic jam (shown inred segments). We find that after zooming in, there are alsounmarked road segments by Google Map. WiLocator alsodetects some anomalies, but none road segment is unmarkedas it exploits the temporal constancy to infer the future traffic.As can be expected, with more historical data, WiLocator canoffer a more accurate real-time traffic map.
VI. DISCUSSIONS
A. Locating Unknown WiFi APs
It is noted that while many WiFi APs are geo-tagged, thereare still some APs with unknown coordinates. As mentionedin Section III-A, the more WiFi APs available surrounding thebus, the more accurate. However, in reality there might be fewgeo-tagged WiFi APs around some road segments, while the
Fig. 16. An illustrative example of locating unknown WiFi AP f .Points f1 and f2 on the road segment correspond to the first time and lasttime when the rank of the RSS readings from AP f is the largest, respectively.The estimated location of the AP f is indicated by the solid red circle.
Fig. 17. The scenario of SVD-based indoor localization.
unknown WiFi APs are useless for offering an accurate result.As such, we now propose to locate these unknown WiFi APs.Our approach is based on the obtained bus trajectory, say,by WiLocator or WiLocator(p).
Let’s take Fig. 16 as an example. When the bus moves onthe road segment ei , the mobile devices by the participantsmay detect the strongest signal from an AP f with unknowncoordinates. Let f1 and f2 be the two points on the trajectory,corresponding to the first time and the last time that thedevices received the strongest signal from AP f , respectively.To locate the AP f , we draw two circles (indicated by thedashed circles in Fig. 16), namely C( f1, d1) centered at f1with radius d1 = dist ( f1, AP(d)) and C( f2, d2) centered atf2 with radius d2 = dist ( f2, AP(b)), where dist ( f1, AP(d))denotes the distance between f1 and the location of WiFiAP d . We believe that between the road segment p f1 withinC( f1, d1) ∩ C( f2, d2), the RSS readings from AP f havethe largest rank with high stability.11 Therefore, we regardthe location where the two circles C( f1, d1) and C( f2, d2)intersect as the estimated location of AP f . Theoretically, thereare two candidate locations of AP f as C( f1, d1) intersectswith C( f2, d2) at two points on two sides of the road segment.The key observation here is that the bus will travel intothe signal cell SC(b), instead of remaining in SC(d), afterleaving f2. As such, we regard the intersection point nearerto AP b as the estimated location of AP f . Clearly, the newlylocated WiFi AP can benefit the construction of a finer SVD,and thus potentially improves the positioning accuracy.
B. SVD-Based Indoor Localization
We envision that the proposed bus positioning scheme canalso be used for indoor localization. For instance, in Fig. 17,
11That is, the RSS readings are less unstable on segment p f1 than thoseon other segments.

ZHANG et al.: WiFi SENSING-BASED REAL-TIME BUS TRACKING AND ARRIVAL TIME PREDICTION 4757
when a person is approaching a shop gate along the corridor,the shopper owner may trigger location-based promotions tothis person. In this case, we argue that the difference of thelocations on Y-axis can be negligible, and of our primaryinterest is the positioning error along X-axis. Therefore, giventhe floor map and the semantics of the WiFi APs (i.e., the shopnames), we can apply the above-mentioned SVD-based posi-tioning schemes, i.e., WiLocator or WiLocator(p), for locatingusers walking along the corridor. Specifically, when a userwalks along the corridor, the mobile device detects the WiFisignals and uploads to the server. Afterwards, the server con-structs the SVD based on the floor map and the semantics ofWiFi APs where each room corresponding to an AP is deemedas a dummy point, and thus the user can be located. Differentfrom the outdoor environments, the user can be on any floor inindoor space, while at some places the WiFi signal from oneWiFi AP (e.g., an AP belonging to a multi-floor shop) can bethe strongest on multiple floors. To distinguish which floor theuser is on, the naive way is to exploit the barometer readings.However, the barometer readings vary (e.g., with temperature)from day to day, such that the absolute barometer readings arenot feasible for determining the exact floor level. In this case,we can apply the semantics of other WiFi APs to eliminatethe ambiguity. For instance, if the mobile device detects thestrongest signal from a WiFi AP in the multi-floor departmentof Sears (e.g., on the 1st and 2nd floor), while the secondstrongest signal is from an AP placed in a shop on the 2nd flooronly, then we can easily infer that the user is on the 2nd floor.
VII. RELATED WORK
In this section we briefly review the previous workrelated to ours in two areas: WiFi-based localization and bustracking.
A. WiFi-Based Localization
1) Fingerprinting-Based Localization: An active approachof this line is RF Fingerprinting-based [4], [6], [11], [12],[16], [20], [27], [41], [42], which require an offline trainingphase and online matching phase. During the offline train-ing phase (so-called calibration), an on-site survey of RSSmeasurements is conducted to build a fingerprint database,such that a mobile device can be localized by matchingthe observed RSS measurements against the fingerprintingdatabase. As the process of the calibration (or on-site survey)is labor-extensive and time consuming, a body of solutionsare proposed to reduce the effort. For instance, envision thatmobility can increase localizability [39], Wu et al. [34], [35]and Yang et al. [38] adopt the user motions from smartphoneswith built-in inertial measurement unit (IMU) sensors (e.g.,accelerometer, gyroscope, etc.) for radio map construction andremoves the need for site survey while achieving a room-level accuracy. UnLoc [32] exploits the identifiable signaturesof certain locations (e.g., elevators, corridor-corner, etc.) inindoor environments, which serve as the internal landmarkssuch that the mobile devices can recalibrate their locations.Unfortunately, while requiring less cost for fingerprinting data-base, these solutions seriously hurts the localization accuracy.
Recently the Channel state information (CSI) has beenapplied for indoor localization [40]. Compared with the single-valued RSS readings, CSI has multiple values which describethe pairwise amplitude-phase for each subcarrier in thefrequency domain, and can provide fine-grained informationfrom the physical layer. Most importantly, CSI is more stablethan RSS readings. As such, Wu et al. [36] propose to buildCSI-based fingerprinting database, and demonstrate that theCSI can improve the localization accuracy. The undesirabilityis that currently the COTS mobile devices can not capture theWiFi CSI, which potentially limits their applicability in reality.
2) Model-Based Localization: To avoid the use of labor-extensive fingerprinting database, some researchers exploitsthe radio-frequency (RF) propagation model, e.g., the log-distance path loss (LDPL) model, for indoor localization [7],[9], [10], [18], [22], [37], [43]. For instance, assuming a densecoverage of WiFi, EZ [7] models the constraints of the reportedobservation by physics of signal propagation and locatethe mobile user based on the proposed genetic algorithm.WiGem [10] builds the Gaussian Mixture Model (GMM)of RSS readings where the parameters are estimated by theExpectation Maximization (EM) approach during the learningphase, and determines the location of the device accordingto the rule of maximum a posteriori. Lim et al. [18] deployWiFi sniffers at given locations and combine the RSS readingsand LDPL model to construct the RSS map for localization.Similarly, in [15], the sniffers deployed at known locationsand the ray-tracing model are used. Madigan et al. [9] findthat the hierarchical Bayesian approach can incorporate thenatures of WiFi signals, and thus propose a zero profilinglocation scheme.
In addition to using the RF propagation models like LDPL,some researchers propose to locate the mobile devices byusing such geometric models as Time of Arrival (ToA) [43],Time Difference of Arrival (TDoA) [26], and Angle ofArrival (AoA) [44], etc. The model-based techniques savegreatly the efforts for building radio map, albeit at the cost oflow accuracy. That is, there exists an accuracy-cost tradeoff.
B. Real-Time Bus Tracking
In literature, there are two major approaches to track thebus: GPS-based and cellular infrastructure based.
The major limitations of GPS-based tracking system are asfollows. First, it is extremely power-hungry. Second, equippingeach bus with in-vehicle devices will incur a large initialand recurring costs [29], making this solution prohibitive,especially for many small transit agencies operating only a fewbuses. Third, the city geometry (or so-called urban canyons)will incur an inaccurate positioning result by GPS-basedlocation system: the high buildings, or tunnels, will blockthe line-of-sight (LOS) paths to the satellites, and thus thegenerated multi-path problem will contribute to a localizationerror of several hundred meters for the bus under the shadowof satellite signal. Such an urban canyon effect also exists inbenign environments like residential neighborhoods or cam-pus [23]. Last but not least, it cannot offer the arrival timeestimation if the bus goes off its regular route or when there

4758 IEEE SENSORS JOURNAL, VOL. 18, NO. 11, JUNE 1, 2018
is an unusual event causing the bus unmovable for severalminutes [1]. With the goal of saving the cost of offeringthe services of real-time tracking and arrival time prediction,Biagioni et al. [5] presented EasyTracker, an automatic bustracking and arrival time prediction system by using a COTSsmartphone, carried by the driver or installed in the bus, forGPS trace recording. However, even without any other activitybut keeping GPS activated only, generally a smartphone willdrain its energy in less than 12 hours [23], [33], [48]. Such aroadblock on the way to all-day usage of smartphone in vehiclewill affect seriously the system performance. Beyond that,the urban canyons problem makes it infeasible for accuratebus tracking in urban environments.
An alternative approach is smartphone-based crowd-sensingvia cell-ID sequence matching [24], [45]–[47]. However,in cities, the coverage of a cell tower can reach 800m around,and it take several minutes for the bus rider to capture astable cell-ID sequence, potentially incurring a low accuracy.Also the overlapped road segments in urban environments posegreat challenges for real-time bus tracking.
In this paper we explore the capability of the RSS rank forbus tracking, and its application for bus arrival time prediction.We build the signal Voronoi diagram (SVD) based on thegeo-tagged WiFi APs densely distributed along the road ofurban environments, and exploit the mobility constraint of abus to infer its real-time location. The SVD-based positioningtechniques naturally eliminate the need for building theexpensive radio map as in the fingerprinting-based schemesand estimating the parameters as in the model-basedtechniques, while requiring no modification to the COTSmobile devices. Further, our scheme is energy-friendly anddoes not suffer from urban canyons as compared with theGPS-based. Meanwhile, it only requires a short scanningtime for capturing the signals from surrounding WiFi APsand does not suffer from the overlapped road segments ascompared with the Cell-tower based approaches.
VIII. CONCLUSIONS AND FUTURE WORK
We study the issue of real-time bus tracking and arrivaltime prediction in urban areas with smartphone-based crowd-sensing, and design a scheme to leverage the mobility con-straint of a bus, and the travel time consistency of buses onthe same road segment. We instantly track a bus by using thescanned WiFi information available for bus riders to constructa signal Voronoi diagram (SVD) based on the rank of RSSmeasurements from nearby WiFi APs, instead of relying onfingerprinting the WiFi APs or signal model. We also presentan alternative approach to track a bus by computing thedominated road sub-segments based on historical data. Foreach road segment, we compute the seasonal index of thetravel time, and thereon the historical travel time of eachtime slot. By incorporating the historical and most recentlytravel time of the bus routes shared the same road segments,we obtain a predicted arrival time of the bus at intended stops.In addition, based on the constructed SVD and the positioningresults, we propose to locate unknown WiFi APs such thatmore APs can be utilized for bus tracking, and we also discussthe applicability of SVD for indoor localization.
In addition to the applications for bus arrival time predictionand traffic map generation, we also envision that the proposedSVD has the potential for facilitating navigation in urban envi-ronments where an inaccurate positioning of the vehicle mightlead to a wrong turn instruction. The energy-efficiency ofWiFi sensing goes first for WiFi-based applications [14], andone interest problem is to study the relationship between theperformance of the proposed schemes and energy efficiency.These will be our future work.
ACKNOWLEDGEMENTS
A preliminary version of the work appeared in the Proceed-ings of IEEE ICDCS 2016 [21].
REFERENCES
[1] CTA Bus Tracker. Accessed: Apr. 18, 2018. [Online]. Available:http://www.ctabustracker.com/bustime
[2] F. Aurenhammer, “Voronoi diagrams—A survey of a fundamental geo-metric data structure,” ACM Comput. Surv., vol. 23, no. 3, pp. 345–405,1991.
[3] M. Azizyan, I. Constandache, and R. R. Choudhury, “SurroundSense:Mobile phone localization via ambience fingerprinting,” in Proc. ACMMOBICOM, 2009, pp. 261–272.
[4] P. Bahl and V. N. Padmanabhan, “RADAR: An in-building RF-based user location and tracking system,” in Proc. IEEE INFOCOM,Mar. 2000, pp. 775–784.
[5] J. Biagioni, T. Gerlich, T. Merrifield, and J. Eriksson, “EasyTracker:Automatic transit tracking, mapping, and arrival time prediction usingsmartphones,” in Proc. ACM SenSys, 2011, pp. 68–81.
[6] Y.-C. Cheng, Y. Chawathe, A. LaMarca, and J. Krumm, “Accuracycharacterization for metropolitan-scale Wi-Fi localization,” in Proc.ACM MOBISYS, 2005, pp. 233–245.
[7] K. Chintalapudi, A. P. Iyer, and V. N. Padmanabhan, “Indoor localizationwithout the pain,” in Proc. ACM MOBICOM, 2010, pp. 173–184.
[8] I. Constandache, S. Gaonkar, M. Sayler, R. R. Choudhury, and L. Cox,“EnLoc: Energy-efficient localization for mobile phones,” in Proc. IEEEINFOCOM, Apr. 2009, pp. 2716–2720.
[9] D. Madigan, E. Einahrawy, R. P. Martin, W.-H. Ju, P. Krishnan, andA. S. Krishnakumar, “Bayesian indoor positioning systems,” in Proc.IEEE INFOCOM, Mar. 2005, pp. 1217–1227.
[10] A. Goswami, L. E. Ortiz, and S. R. Das, “WiGEM: A learning-basedapproach for indoor localization,” in Proc. 7th Conf. Emerg. Netw.Experim. Technol. (CoNEXT), 2011, Art. no. 3.
[11] Y. Gwon, R. Jain, and T. Kawahara, “Robust indoor location estimationof stationary and mobile users,” in Proc. IEEE INFOCOM, Mar. 2004,pp. 1032–1043.
[12] A. Haeberlen, E. Flannery, A. M. Ladd, A. Rudys, D. S. Wallach, andL. E. Kavraki, “Practical robust localization over large-scale 802.11wireless networks,” in Proc. ACM MOBICOM, 2004, pp. 70–84.
[13] G. Iosifidis, L. Gao, J. Huang, and L. Tassiulas, “A double-auctionmechanism for mobile data-offloading markets,” IEEE/ACM Trans.Netw., vol. 23, no. 5, pp. 1634–1647, Oct. 2015.
[14] J. Jeong, Y. Yi, J.-W. Cho, D. Y. Eun, and S. Chong, “Energy-efficient Wi-Fi sensing policy under generalized mobility patternswith aging,” IEEE/ACM Trans. Netw., vol. 24, no. 4, pp. 2416–2428,Aug. 2016.
[15] Y. Ji, S. Biaz, S. Pandey, and P. Agrawal, “ARIADNE: A dynamicindoor signal map construction and localization system,” in Proc. ACMMobiSys, 2006, pp. 151–164.
[16] A. M. Ladd, K. E. Bekris, A. Rudys, G. Marceau, L. E. Kavraki,and D. S. Wallach, “Robotics-based location sensing using wirelessEthernet,” in Proc. ACM MOBICOM, 2002, pp. 227–238.
[17] M. Lee and D. Han, “Voronoi tessellation based interpolation methodfor Wi-Fi radio map construction,” IEEE Commun. Lett., vol. 16, no. 3,pp. 404–407, Mar. 2012.
[18] H. Lim, L.-C. Kung, J. C. Hou, and H. Luo, “Zero-configuration,robust indoor localization: Theory and experimentation,” in Proc. IEEEINFOCOM, Apr. 2010, pp. 1–12.
[19] K. Lin, A. Kansal, D. Lymberopoulos, and F. Zhao, “Energy-accuracytrade-off for continuous mobile device location,” in Proc. ACMMOBISYS, 2010, pp. 285–298.

ZHANG et al.: WiFi SENSING-BASED REAL-TIME BUS TRACKING AND ARRIVAL TIME PREDICTION 4759
[20] H. Liu et al., “Push the limit of WiFi based localization for smart-phones,” in Proc. ACM MOBICOM, 2012, pp. 305–316.
[21] W. Liu et al., “WiLocator: WiFi-sensing based real-time bus tracking andarrival time prediction in urban environments,” in Proc. IEEE ICDCS,Jun. 2016, pp. 529–538.
[22] D. Niculescu and B. Nath, “VOR base stations for indoor 802.11positioning,” in Proc. ACM MOBICOM, 2004, pp. 58–69.
[23] J. Paek, J. Kim, and R. Govindan, “Energy-efficient rate-adaptive gps-based positioning for smartphones,” in Proc. ACM MOBISYS, 2010,pp. 299–314.
[24] J. Paek, K.-H. Kim, J. P. Singh, and R. Govindan, “Energy-efficientpositioning for smartphones using cell-id sequence matching,” in Proc.ACM MOBISYS, 2011, pp. 293–306.
[25] J.-G. Park et al., “Growing an organic indoor location system,” in Proc.ACM MOBISYS, 2010, pp. 271–284.
[26] N. B. Priyantha, A. Chakraborty, and H. Balakrishnan, “Thecricket location-support system,” in Proc. ACM MOBICOM, 2000,pp. 32–43.
[27] T. Roos, P. Myllymaki, and H. Tirri, “A statistical modeling approachto location estimation,” IEEE Trans. Mobile Comput., vol. 1, no. 1,pp. 59–69, Jan. 2002.
[28] N. Swangmuang and P. Krishnamurthy, “Location fingerprint analysestoward efficient indoor positioning,” in Proc. IEEE PerCom, Mar. 2008,pp. 100–109.
[29] A. Thiagarajan, J. Biagioni, T. Gerlich, and J. Eriksson, “Cooperativetransit tracking using smart-phones,” in Proc. ACM SenSys, 2010,pp. 85–98.
[30] A. Thiagarajan et al., “VTrack: Accurate, energy-aware road trafficdelay estimation using mobile phones,” in Proc. ACM SenSys, 2009,pp. 85–98.
[31] A. Thiagarajan, L. S. Ravindranath, H. Balakrishnan, S. Madden, andL. Girod, “Accurate, low-energy trajectory mapping for mobile devices,”in Proc. USENIX NSDI, 2011, pp. 267–280.
[32] H. Wang, S. Sen, A. Elgohary, M. Farid, M. Youssef, andR. R. Choudhury, “No need to war-drive: Unsupervised indoor local-ization,” in Proc. ACM MOBISYS, 2012, pp. 197–210.
[33] Y. Wang et al., “A framework of energy efficient mobile sensingfor automatic user state recognition,” in Proc. ACM MOBISYS, 2009,pp. 179–192.
[34] C. Wu, Z. Yang, Y. Liu, and W. Xi, “WILL: Wireless indoor local-ization without site survey,” in Proc. IEEE INFOCOM, Mar. 2012,pp. 64–72.
[35] C. Wu, Z. Yang, Y. Liu, and W. Xi, “WILL: Wireless indoor localizationwithout site survey,” IEEE Trans. Parallel Distrib. Syst., vol. 24, no. 4,pp. 839–848, Apr. 2013.
[36] K. Wu, J. Xiao, Y. Yi, D. Chen, X. Luo, and L. M. Ni, “CSI-basedindoor localization,” IEEE Trans. Parallel Distrib. Syst., vol. 24, no. 7,pp. 1300–1309, Jul. 2013.
[37] J. Xiong and K. Jamieson, “ArrayTrack: A fine-grained indoor locationsystem,” in Proc. USENIX NSDI, 2013, pp. 71–84.
[38] Z. Yang, C. Wu, and Y. Liu, “Locating in fingerprint space: Wirelessindoor localization with little human intervention,” in Proc. ACM MOBI-COM, 2012, pp. 269–280.
[39] Z. Yang, C. Wu, Z. Zhou, X. Zhang, X. Wang, and Y. Liu, “Mobilityincreases localizability: A survey on wireless indoor localizationusing inertial sensors,” ACM Comput. Surv., vol. 47, no. 3, 2015,Art. no. 54.
[40] Z. Yang, Z. Zhou, and Y. Liu, “From RSSI to CSI: Indoor localizationvia channel response,” ACM Comput. Surv., vol. 46, no. 2, Dec. 2013,Art. no. 25.
[41] M. Youssef and A. Agrawala, “Handling samples correlationin the Horus system,” in Proc. IEEE INFOCOM, Mar. 2004,pp. 1023–1031.
[42] M. Youssef and A. Agrawala, “The Horus WLAN location determinationsystem,” in Proc. ACM MOBISYS, 2005, pp. 205–218.
[43] M. Youssef, A. Youssef, C. Rieger, U. Shankar, and A. Agrawala,“PinPoint: An asynchronous time-based location determination system,”in Proc. ACM MobiSys, 2006, pp. 165–176.
[44] Z. Zhang et al., “I am the antenna: Accurate outdoor ap location usingsmartphones,” in Proc. ACM MOBICOM, 2011, pp. 109–120.
[45] P. Zhou, S. Jiang, and M. Li, “Urban traffic monitoring with the helpof bus riders,” in Proc. IEEE ICDCS, Jun./Jul. 2015, pp. 21–30.
[46] P. Zhou, Y. Zheng, and M. Li, “How long to wait?: Predicting busarrival time with mobile phone based participatory sensing,” in Proc.ACM MobiSys, 2012, pp. 379–392.
[47] P. Zhou, Y. Zheng, and M. Li, “How long to wait? Predicting busarrival time with mobile phone based participatory sensing,” IEEE Trans.Mobile Comput., vol. 13, no. 6, pp. 1228–1241, Jun. 2014.
[48] Z. Zhuang, K.-H. Kim, and J. P. Singh, “Improving energy efficiencyof location sensing on smartphones,” in Proc. ACM MOBISYS, 2010,pp. 315–330.
Rui Zhang received the B.S. degree in com-puter application technology from the JianghanPetroleum Institution, China, in 2000, and the M.S.and Ph.D. degrees in computer science from theHuazhong University of Science and Technology,China, in 2003 and 2012, respectively. She is anAssociate Professor with the School of ComputerScience and Technology, Wuhan University of Tech-nology, China. Her research interests include net-work analysis, mobile computing, and data mining.
Wenping Liu (SM’17) received the M.S. and Ph.D.degrees from the Huazhong University of Scienceand Technology, China. He is currently an AssociateProfessor with the School of Information Manage-ment and Statistics, Hubei University of Economics,China, and holds a post-doctoral position withthe School of Computer Science and Technology,Huazhong University of Science and Technology.His research interests include statistical modeling,mobile computing, and Internet of Things.
Yufu Jia received the Ph.D. degree from theHuazhong University of Science and Technology,China. He is currently an Assistant Professorwith the School of Information Management andStatistics, Hubei University of Economics, China.His research interests include mobile computing andInternet of Things.
Guoyin Jiang received the Ph.D. degree from theHuazhong University of Science and Technology,China, in 2010. He was a Professor with the Schoolof Information Management and Statistics, HubeiUniversity of Economics, China. He is currently aProfessor with the University of Electronic Scienceand Technology of China. His research interestsinclude decision support systems, simulation, ande-commerce.
Jing Xing is currently pursuing the Ph.D. degreewith the China University of Geosciences, China.She is an Associate Professor with the HubeiUniversity of Economics, China. Her researchinterests include statistical signal processing andbioinformatics.

4760 IEEE SENSORS JOURNAL, VOL. 18, NO. 11, JUNE 1, 2018
Hongbo Jiang (SM’14) received the Ph.D. degreefrom Case Western Reserve University in 2008.After graduation, he joined the Faculty of HuazhongUniversity of Science and Technology as a FullProfessor and the Dean of the Department ofCommunication Engineering. He is currently a FullProfessor with the College of Computer Scienceand Electronic Engineering, Hunan University. Hisresearch concerns computer networking, especiallyalgorithms and protocols for wireless and mobilenetworks. He is serving as an Editor for the
IEEE/ACM TRANSACTIONS ON NETWORKING, an Associate Editor forthe IEEE TRANSACTIONS ON MOBILE COMPUTING, and an AssociateTechnical Editor for the IEEE Communications Magazine.
Jiangchuan Liu (F’17) received the Ph.D. degreein computer science from The Hong Kong Univer-sity of Science and Technology in 2003. He is aUniversity Professor with the School of Comput-ing Science, Simon Fraser University, Canada, andan NSERC E.W.R. Steacie Memorial Fellow. Hisinterests include multimedia systems and networks,cloud computing, social networking, online gaming,big data computing, wireless sensor networks, etc.