Embed Size (px)
Citation preview
X-Ray Computed Tomography
Jonathan Schock, Manuel Viermetz
March 21, 2017
X-Ray Computed Tomography (CT) is an indirect non-destructive imagingmethod. It allows to visualize the local absorption properties of a specimen.As it is an indirect method, CT requires the application of a numerical recon-struction algorithm to retrieve these absorption coefficients. In this studentlab experiment you will perform several CT scans and reconstruct tomogramsfrom them using the Filtered Backprojection algorithm. For data analysisand all the calculations MATLAB is used. You may bring along your ownsample as well for examinations. A printout of this manual is available atthe experiment!
0 Meta-Information
Location: Physics department (Chair of Biomedical Physics)room: 1710 (in the basement, back left end from main entry)Technische Universitat MunchenJames-Franck-Str. 185748 Garching, Germany
Contacts: Jonathan Schock or Manuel Viermetzroom: 1.110 (open office, 1st floor)TUM Institute of Medical Engineering (IMETUM)Boltzmannstr. 11, 85748 Garching, Germanyemail: [email protected] [email protected]
phone: +49 (0) 89 289 10846 or +49 (0) 89 289 10861
1
1 Introduction
As a non-destructive analysis technique computed tomography (CT) has been used inmedicine, materials science, biology and many other fields for a long time. CT allows tovisualize the x-ray absorption coefficient with respect to the position inside the sample.
This student lab experiment was designed to give you an insight on the backgroundof this technique. You will perform one complete CT scan of a sample to analyze someproperties of a typical reconstruction algorithm and to understand the physical theoryand the necessary steps that have to be taken to end up with a good CT reconstruction.Please bring along a suitable sample, that is non-metallic, has a mixture of differentmaterials and is about 4x4x4 cm large. As the amount of data created during theexperiment is quite large (around 10 GB), it is advisable to bring along either a largeUSB memory stick or an external hard-drive if you take your data the next day afterprocessing.
To fully understand the experimental details it is recommended to read the relevantchapters in [1], which is also available online [2], in addition to this manual. The ex-perimental control as well as the data reconstruction and analysis will be performed inMATLAB. If you are not familiar with this application, you should start reading [3].Section 3.5.3 gives a short list of MATLAB commands that you will most likely need.
For the interpretation of your results the Photon Cross Sections Database [4] and theTables of X-Ray Mass Attenuation Coefficients [5] may prove to be helpful.
X-ray computed tomography (CT) is not a direct imaging method, which means thatthe maintained data has to be analyzed and visualized using several complex algorithms.As a result it gives three-dimensional information about the distribution of the element-specific attenuation coefficient µ in the scanned volume. An x-ray producing device(e.g. an x-ray tube or a synchrotron) is used to take pictures of a sample in front ofa detector. These two-dimensional pictures are called projections. Several projectionsare taken from different angles via either rotating the sample around the vertical axisor rotating the x-ray device and detector around the sample. The obtained projectionsare then used to compute a three-dimensional representation of the spatial distributionof the attenuation coefficient µ inside the sample. Here, the principle of the imagereconstruction will be briefly explained (for more details see the particular references).
2

2 Theory
This part of the manual will focus mainly on the mathematics of the physical theoriesbehind CT and image reconstruction, leaving out the physical mechanisms that lead toabsorption of radiation in matter. The formulas and the approach of this section arebased on [6, (pp. 32f., 46f.)].
2.1 Attenuation Coefficient
All physical mechanisms that have to do with attenuation of radiation going through amaterial are dependent on the attenuation coefficient of the material µ, which is a posi-tive, material specific constant, considering absorption and scattering of radiation insidethe material. The absorption and therefore the attenuation coefficient itself depends onthe atomic number Z of the material as
µ ∝ Z4
and directly proportional to the mass density ρ of the respective material. This resultsin the advantage, that by knowing the spatial distribution of the attenuation coefficient,one has a direct physical interpretation of the values. If polychromatic radiation is used,one also has to consider the dependency of the wavelength which goes like:
µ ∝ λ3
As mentioned in the next chapter, there is a correction for polychromaticity effects.
2.2 Lambert Beer’s Law
After Lambert Beer’s law, the intensity of radiation after traveling through a materialwith the thickness ∆η and the attenuation coefficient µ(η) is given by:
I(η + ∆η) = I(η)− µ(η)I(η)∆η (1)
This equation can be reordered and by taking the limit one gets the differential quotient
dI
dη= −µ(η)I(η) (2)
Assuming that the material is homogeneous, the function −µ(η) collapses to the con-stant µ along the entire length ∆η of the material. After simple integration and expo-nentiation one obtains
I(η) = I0 · e−µη (3)
where I0 = I(0). As we go away from the ideal point of view and over to real materials,it is sure, that the attenuation coefficient will not be constant anymore and even dependson the energy of the radiation which leads to
I(s) =
∫ Emax
0
I0(E) · e−∫ s0 µ(E,η) dη dE (4)
3

where s is the travel distance of the radiation. The simplified model without energydependence is then:
I(s) = I(0) · e−∫ s0 µ(η) dη. (5)
As the x-ray tube employed in this experiment produces polychromatic radiation, theexact solution is provided by equation (4). However, being a quite good approximation,equation (5) can be used instead for our purposes.As mentioned above, one is especially interested in the spatial variation of the attenua-tion, therefore the projection integral is defined as:
p(s) = − ln
(I(s)
I(0)
)=
∫ s
0
µ(η) dη (6)
2.3 Image Reconstruction
This part covers the reconstruction of two- and three-dimensional images out of the rawdata. It follows closely the according sections in [7, (p.247 ff)] where all equations canbe found. Small changes of variables and names were introduced to preserve consistencywith the previous chapter.
2.4 Two-dimensional Reconstruction
Despite having a three-dimensional reconstruction problem to solve, we start with thetwo-dimensional problem, which can than be generalized to the three-dimensional case.The attenuation coefficient in one plane is assumed to be a ”well behaving” function,which means that it is continuous inside the object and zero outside the object. More-over, the object has to be completely inside the detectable area, which can mathemat-ically be described as the inside of the smallest circle around the object, where thefunction of the attenuation coefficient is zero everywhere outside the circle. As we arediscussing the two-dimensional case, the distribution of the attenuation coefficient insidethe material can be described as µ(x, y). The easiest way to solve the problem of re-construction is transferring the whole system to cylinder coordinates, with the object’ssupport fitting in the circle around the origin of the coordinate system. A ray is astraight line in cylinder coordinates and can therefore be described as:
x · cos(θ) + y · sin(θ) = r (7)
where θ is the view angle and r the position on the ray. The projection integral p(s)from equation (6) can then be written as:
p(θ, r) =
∫dx dy µ(x, y)δ(x · cos(θ) + y · sin(θ)− r) (8)
where δ is Dirac’s delta function. The transformation from µ(x, y) to the projectionintegral p(θ, r) is called Radon transformation R. Interpreting R as an operator, one canwrite
p = Rµ (9)
4

and so the problem of reconstruction is equivalent to finding the inverse operator toget the spatial distribution of the attenuation coefficient out of the measured data.Consequently this breaks down to finding R−1 in
R−1p = µ, (10)
which is not trivial.
2.5 Fourier Slice Theorem
This section is to be seen as a little mathematical insert to understand the problem offinding R−1 and the essential theory behind the solution idea. The Fourier transform Fof a function f is defined via
F (u) =
∫ ∞−∞
f(x)e−2πiux dx (11)
and can be reversed via
f(x) =
∫ ∞−∞
F (u)e2πiux du. (12)
The Radon transform is the result of the Fourier slice theorem, which essentially states,”that the Fourier transform of the projections with respect to the distance parameter [r]is the same as the two-dimensional Fourier transform of the object expressed in radialcoordinates [(ux, uy) = (u · cos θ, u · sin θ)]” [7, (p. 294)]. For our case this leads to thesimple identity
F (ux, uy) = F (u · cos(θ), u · sin(θ)) = Pθ(u) (13)
where Pθ(u) is the Fourier transform of the projection integral, defined as
Pθ(u) =
∫ ∞−∞
pθ(r) · e−2πiur dr (14)
Here, the two-dimensional case of the projection integral in equation (6) is used whichreads:
pθ(~r) =
∫ s
0
µ(θ, η) dη (15)
2.6 Simple Backprojection
Whenever enough projections are measured to have enough data points in the spectralspace, which is described via the coordinates (ux, uy), it is possible to apply the two-dimensional inverse Fourier transform to reconstruct the attenuation values. This iscalled simple backprojection, as it traces back the projection values to their origin. Theequation for simple backprojection describes the mathematical step:
g(x, y) =
∫ π
0
pθ(r) dθ =
∫ π
0
pθ(x cos(θ) + y sin(θ)) dθ (16)
5
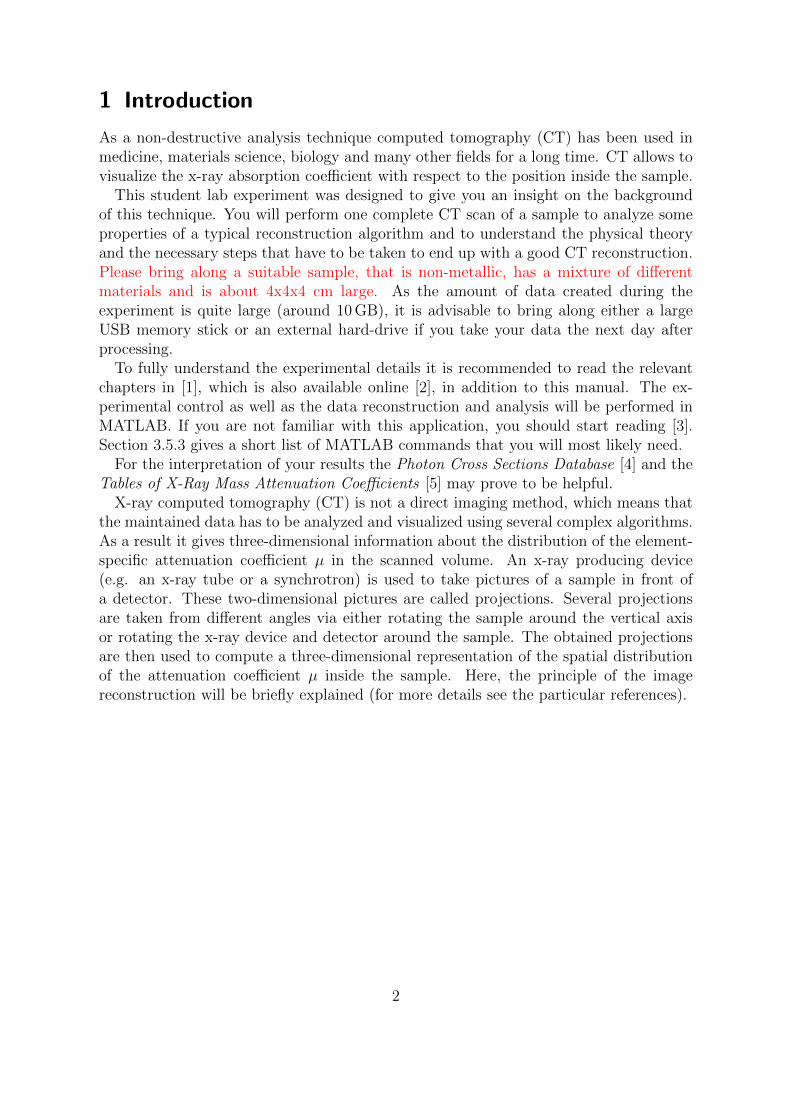
This looks simple and straight-forward; nevertheless a problem arises. As the projectionis reversed, there are non-zero contributions to the value of a point from all the sur-rounding points. Because the projection pθ(~r) is a positive function, even points withµ(x, y) = 0 outside the object get positive values (for a deeper mathematical insightcompare [6, (p. 176 f)]). In spectral space, the data points are spread equidistantly overradial lines. Consequently, their angular distance increases towards larger frequenciesand especially at high frequencies a lot less data points are available than at low fre-quencies (cf. fig. 1). An important consequence is that the real spatial distribution of
Fig. 1: During a CT scan the projection data are measured radially and do not coincidewith the Cartesian grid. Here the Fourier transforms of the projections are shown(image taken from: [6, (p. 169)]).
attenuation coefficients µ(x, y) and the backprojected function g(x, y) are related via aconvolution with the so-called point spread function h(x, y) of the imaging system:
g(x, y) = µ(x, y) ∗ h(x, y). (17)
Here ∗ denotes the convolution operator. A typical example of a point spread functionis plotted in figure 2. Every actual feature in the sample is smeared out by this pointspread function. Hence, the quality of a simple backprojection compared to the actualobject is degraded.
2.7 Filtered Backprojection
To avoid smearing out features in the reconstruction, it is necessary to apply a filter tothe projections of each point in order to reduce the distributions from the surroundingpoints. A simple way to do this, is to replace the simple projection by the high-passfiltered projection hθ(r), which is defined as:
hθ(r) =
∫ ∞−∞
Pθ(u) |u| e2πiur du. (18)
6

Fig. 2: A typical point spread function of one single point (taken from: [6, (p. 178)]).
From a theoretical point of view, a correction is necessary because of the coordinatetransformation from rectangular to polar coordinates. This can be considered as aconvolution in the spatial domain due to the convolution theorem:
hθ(r) =
∫ ∞−∞
pθ(z)k(r − z) dz. (19)
The function k is called the convolution- or reconstruction-kernel and can be optimizedfor special needs in reconstruction. The resulting equation for the reconstruction cannow be established as
µ(x, y) =
∫ π
0
dθ[pθ(r) ∗ k(r)]r=x cos θ+y sin θ, (20)
where pθ(r) are the projections p, which are then convolved with the reconstructionkernel k(r) [8, 9]. A nice comparison between simple and filtered backprojection can befound in [6, (p. 185)] and generalizations of this method to different setup geometries in[1, 2, 6].
Another important question is, for how many different angles you have to record aprojection to get a good reconstruction. There is a rule of thumb saying that you needat least a number of different angles equal to π/2 times the width of your sample inpixels for a 180° rotation. If you are interested in the details, you can find a derivationof this rule in [6, sec. 7.5].
7
3 Experimental Setup
The complete setup is contained in a shielding hutch. Inside the hutch, there are an x-raytube, a sample mount on top of a rotation stage, and an x-ray detector. All componentsare connected to a computer outside the hutch, which is used to control the experiment.
3.1 Hutch and Interlock
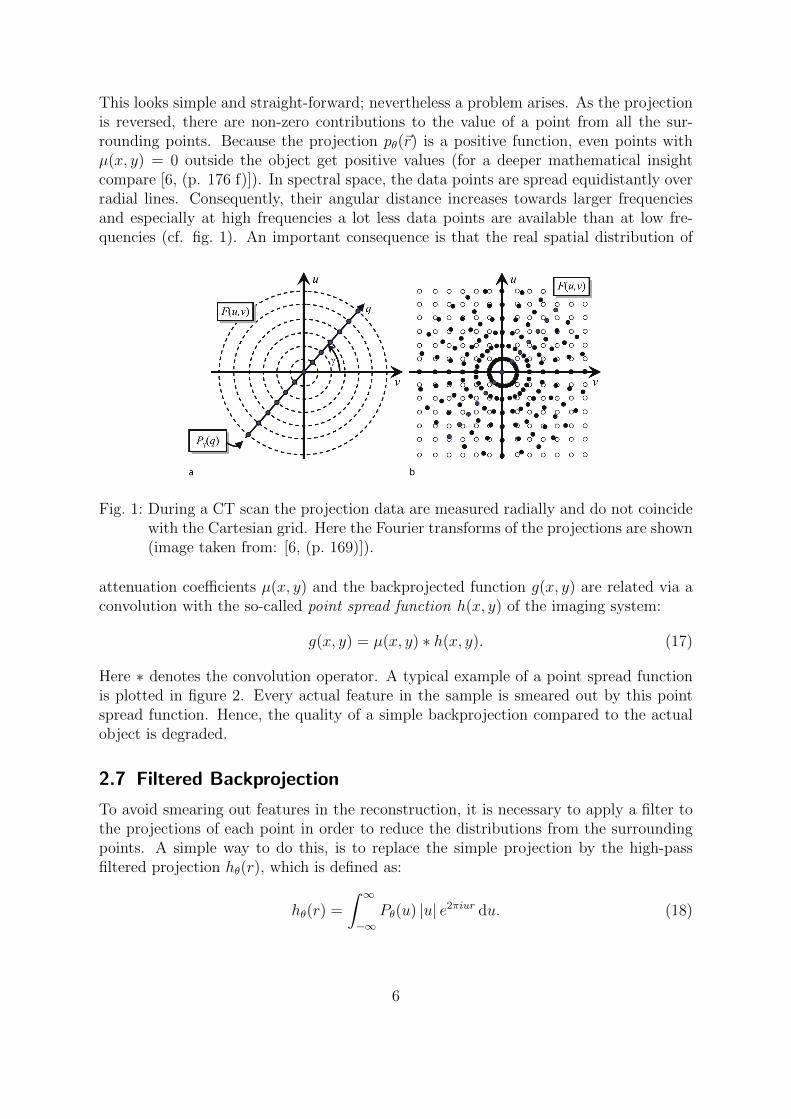
Fig. 3: Left: The outside of the experimental hutch. Right: The setup components insidethe hutch. The x-ray source is located on the right, the sample in the middle andthe detector on the left.
The hutch surrounding the experimental setup is made of aliminum/lead sandwichboards, which ensure that no x-rays can leave the hutch. When the doors are closedthey close an electric interlock circuit that – when open – prevents the generation ofx-rays (see fig. 3). As soon as the interlock is closed, a red light on top of the hutchindicates that x-rays may be generated inside the hutch. Do not touch any one ofthe two interlock switches at any time during your experiments and makesure the red security light is always off, when the hutch is open. Otherwise,please close the doors of the hutch, switch the x-rays off at the computer and call yourtutor for assistance.
3.2 Tube
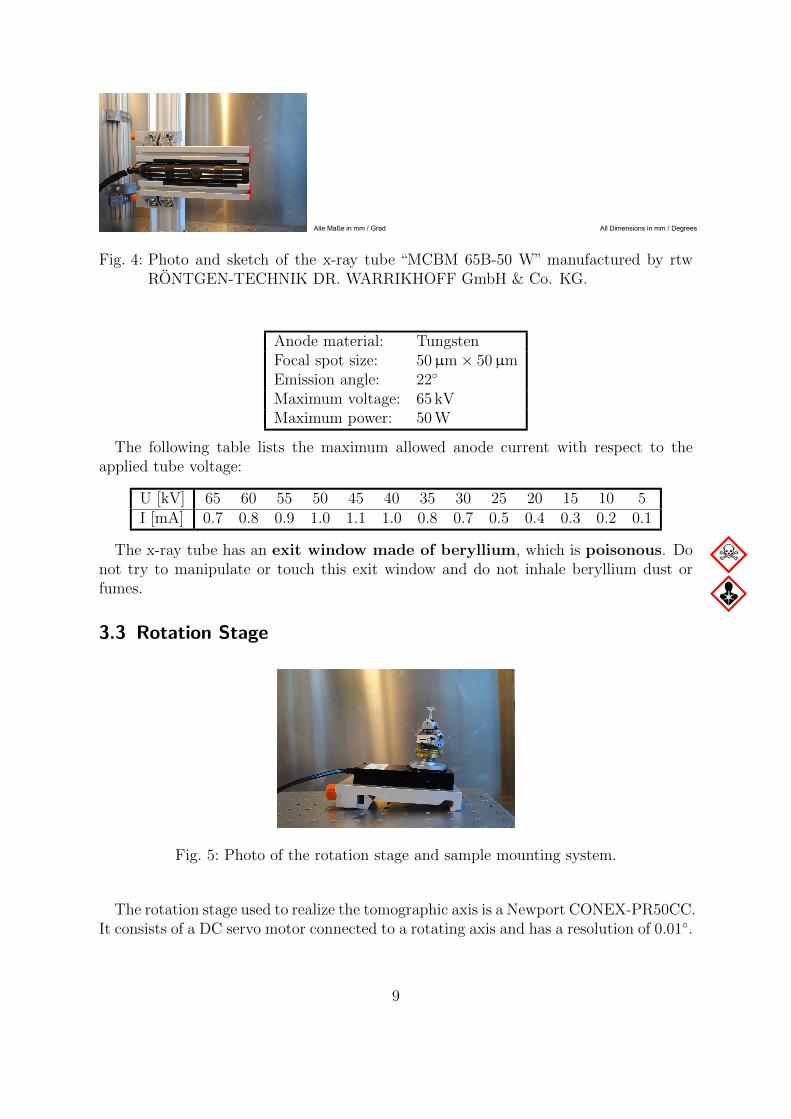
The x-ray tube is a “MCBM 65B-50 W” manufactured by rtw RONTGEN-TECHNIKDR. WARRIKHOFF GmbH & Co. KG. It has the following specifications:
8
Alle Maße in mm / Grad All Dimensions in mm / Degrees
Fig. 4: Photo and sketch of the x-ray tube “MCBM 65B-50 W” manufactured by rtwRONTGEN-TECHNIK DR. WARRIKHOFF GmbH & Co. KG.
Anode material: TungstenFocal spot size: 50µm× 50µmEmission angle: 22◦
Maximum voltage: 65 kVMaximum power: 50 W
The following table lists the maximum allowed anode current with respect to theapplied tube voltage:
U [kV] 65 60 55 50 45 40 35 30 25 20 15 10 5I [mA] 0.7 0.8 0.9 1.0 1.1 1.0 0.8 0.7 0.5 0.4 0.3 0.2 0.1
The x-ray tube has an exit window made of beryllium, which is poisonous. Donot try to manipulate or touch this exit window and do not inhale beryllium dust orfumes.
3.3 Rotation Stage
Fig. 5: Photo of the rotation stage and sample mounting system.
The rotation stage used to realize the tomographic axis is a Newport CONEX-PR50CC.It consists of a DC servo motor connected to a rotating axis and has a resolution of 0.01◦.
9
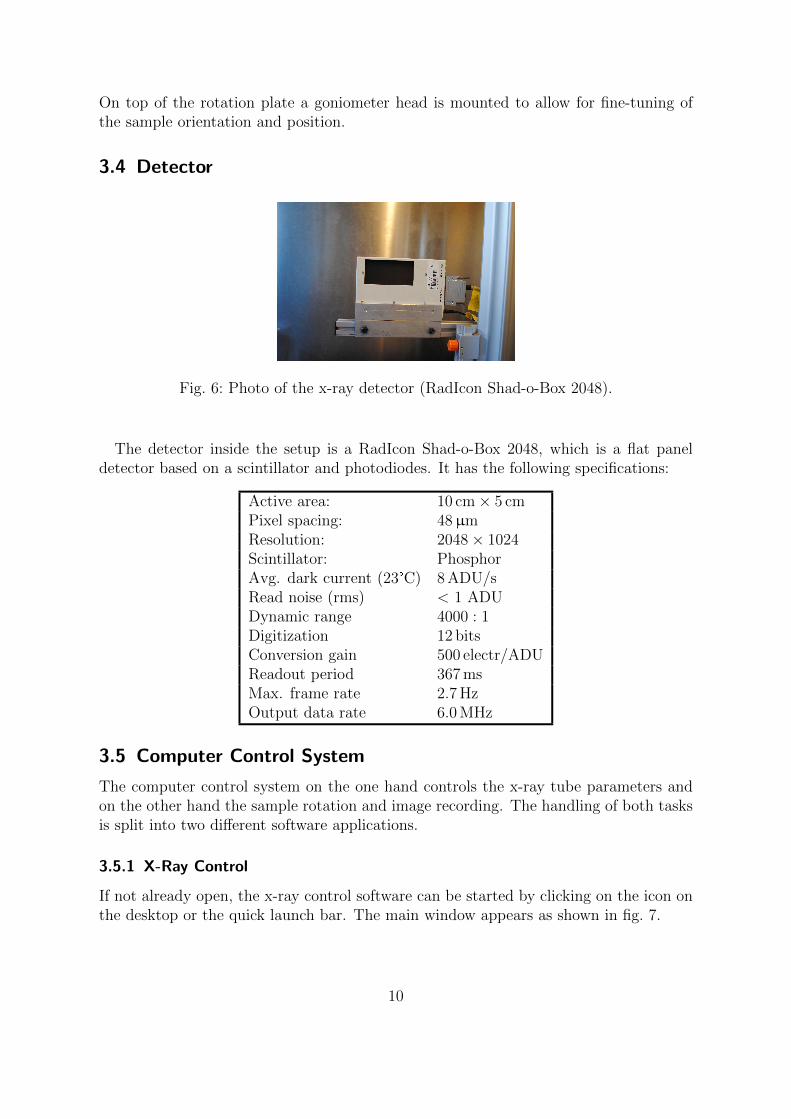
On top of the rotation plate a goniometer head is mounted to allow for fine-tuning ofthe sample orientation and position.
3.4 Detector
Fig. 6: Photo of the x-ray detector (RadIcon Shad-o-Box 2048).
The detector inside the setup is a RadIcon Shad-o-Box 2048, which is a flat paneldetector based on a scintillator and photodiodes. It has the following specifications:
Active area: 10 cm× 5 cmPixel spacing: 48µmResolution: 2048× 1024Scintillator: PhosphorAvg. dark current (23°C) 8 ADU/sRead noise (rms) < 1 ADUDynamic range 4000 : 1Digitization 12 bitsConversion gain 500 electr/ADUReadout period 367 msMax. frame rate 2.7 HzOutput data rate 6.0 MHz
3.5 Computer Control System
The computer control system on the one hand controls the x-ray tube parameters andon the other hand the sample rotation and image recording. The handling of both tasksis split into two different software applications.
3.5.1 X-Ray Control
If not already open, the x-ray control software can be started by clicking on the icon onthe desktop or the quick launch bar. The main window appears as shown in fig. 7.
10
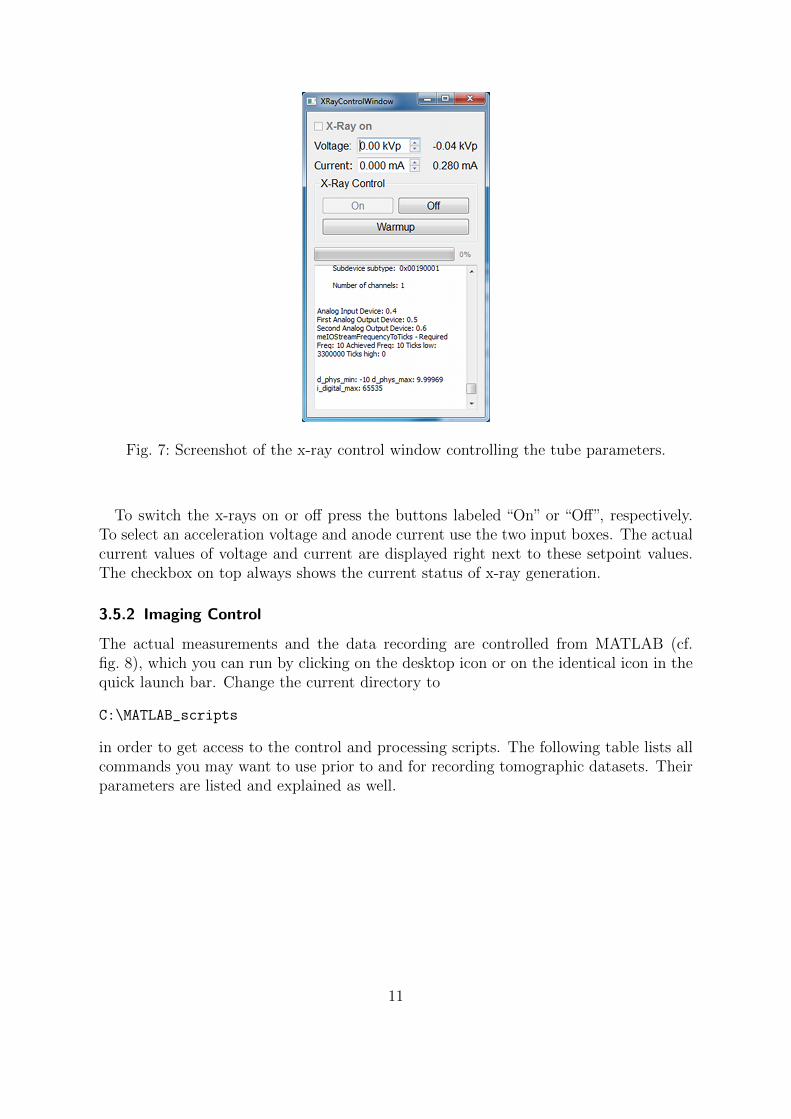
Fig. 7: Screenshot of the x-ray control window controlling the tube parameters.
To switch the x-rays on or off press the buttons labeled “On” or “Off”, respectively.To select an acceleration voltage and anode current use the two input boxes. The actualcurrent values of voltage and current are displayed right next to these setpoint values.The checkbox on top always shows the current status of x-ray generation.
3.5.2 Imaging Control
The actual measurements and the data recording are controlled from MATLAB (cf.fig. 8), which you can run by clicking on the desktop icon or on the identical icon in thequick launch bar. Change the current directory to
C:\MATLAB_scripts
in order to get access to the control and processing scripts. The following table lists allcommands you may want to use prior to and for recording tomographic datasets. Theirparameters are listed and explained as well.
11
Fig. 8: Screenshot of the MATLAB main window, from where you can control the to-mography scans and do the data processing and analysis.
Command Explanation
live_view(exposure_time); Turns on a live view of the detector im-age with the given exposure time in sec-onds and a histogram of counts vs. inten-sity bins. This function will continuouslyupdate the displayed image until you hitCTRL + C.
data = expose(exposure_time); Take a detector image and store it in data.Exposure time has to be given in seconds.
move_rotation_stage(angle, wait); Moves the rotation axis to the given po-sition in degrees. If wait is set to 1 thefunction only returns after the position isreached. Otherwise it returns instantly.
...
12
...
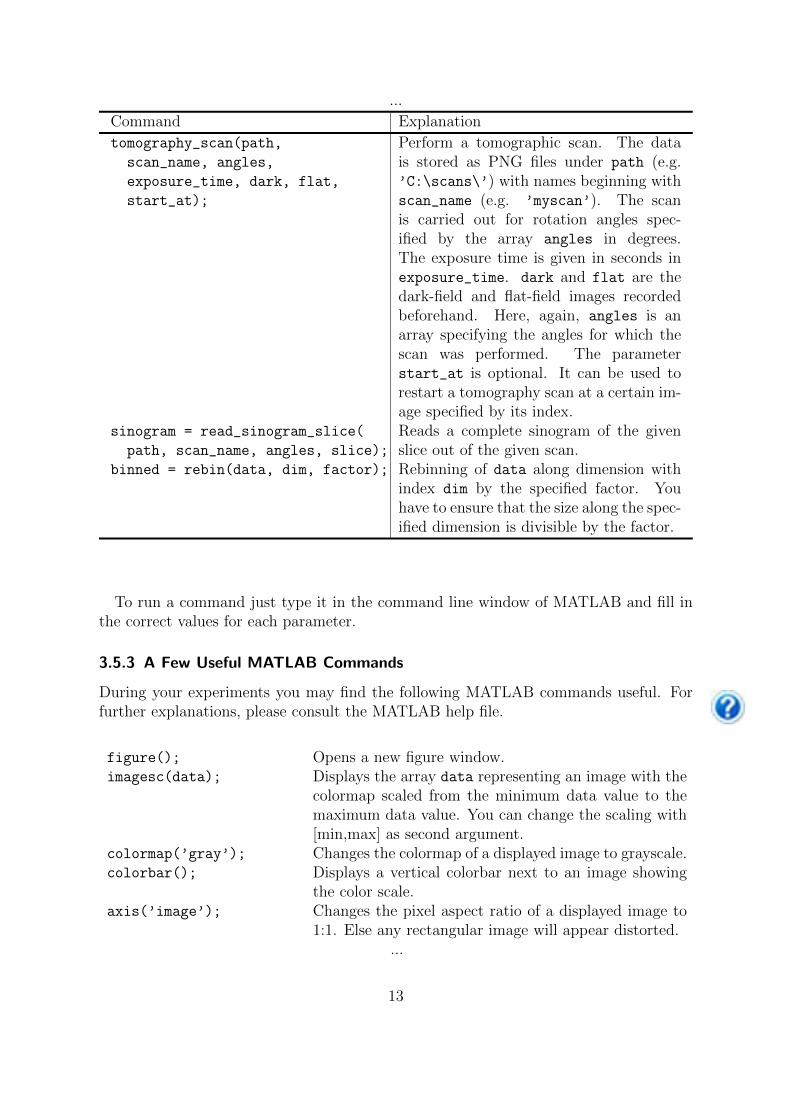
Command Explanation
tomography_scan(path,
scan_name, angles,
exposure_time, dark, flat,
start_at);
Perform a tomographic scan. The datais stored as PNG files under path (e.g.’C:\scans\’) with names beginning withscan_name (e.g. ’myscan’). The scanis carried out for rotation angles spec-ified by the array angles in degrees.The exposure time is given in seconds inexposure_time. dark and flat are thedark-field and flat-field images recordedbeforehand. Here, again, angles is anarray specifying the angles for which thescan was performed. The parameterstart_at is optional. It can be used torestart a tomography scan at a certain im-age specified by its index.
sinogram = read_sinogram_slice(
path, scan_name, angles, slice);
Reads a complete sinogram of the givenslice out of the given scan.
binned = rebin(data, dim, factor); Rebinning of data along dimension withindex dim by the specified factor. Youhave to ensure that the size along the spec-ified dimension is divisible by the factor.
To run a command just type it in the command line window of MATLAB and fill inthe correct values for each parameter.
3.5.3 A Few Useful MATLAB Commands
During your experiments you may find the following MATLAB commands useful. Forfurther explanations, please consult the MATLAB help file.
figure(); Opens a new figure window.imagesc(data); Displays the array data representing an image with the
colormap scaled from the minimum data value to themaximum data value. You can change the scaling with[min,max] as second argument.
colormap(’gray’); Changes the colormap of a displayed image to grayscale.colorbar(); Displays a vertical colorbar next to an image showing
the color scale.axis(’image’); Changes the pixel aspect ratio of a displayed image to
1:1. Else any rectangular image will appear distorted....
13

...hist(data(:)); Shows a histogram of the array given in data.plot(data); Plots a graph based on the array given in data.hold on; Holds the figure open to add one or more graphs with
the same number of data points until the hold off com-mand is given.
legend(’y1’,’y2’); Adds a legend to a figure with several graphs.axis([xmin xmax
ymin ymax]);
Set the x and y limits for the current plot.
max(data); Returns the row containing the largest element of anarray.
data(23, 15) Selects the value of the array data.data(1:10, 10:100) Selects a subregion of the array data going from pixel 1
to 10 in vertical and from pixel 10 to 100 in horizontaldirection.
data(1:2:end, 1:10:end) Selects every second data row and every tenth data col-umn.
x = (0:10:100); Generates a sequence of numbers starting from 0 andusing every tenth number up to 100.
data = imread(filename); Reads the data from an image file.imwrite(data, filename,
’png’, ’bitdepth’,
16);
Writes the data as a 16bit PNG image to the specifiedfile. The color scale corresponds to data values from0.0 to 1.0.
str = sprintf(format, A,
...);
Applies the format to all elements of array A and anyadditional array arguments in column order, and returnsthe results to string str. See MATLAB help for detailsabout usage and format codes.
’%03d’ Format code returning 3-digit integer, zero paddedfor i = (1:100)
<code>
For-loop in matlab with variable i from 1 to 100
end
3.6 Reconstruction Software
MATLAB provides a built-in function (iradon) to perform an actual reconstructionbased on a tomographic dataset you recorded before. It uses the Filtered Backprojectionalgorithm (FBP) to invert the Radon transform. Please refer to the MATLAB help filefor all details that are not explained in this manual.
I = iradon(P, theta, interp, filter, frequency_scaling, output_size);
iradon reconstructs a two-dimensional slice of the sample from the corresponding sino-gram P. Don’t forget that you want to reconstruct the attenuation coefficient (Lambert-
14
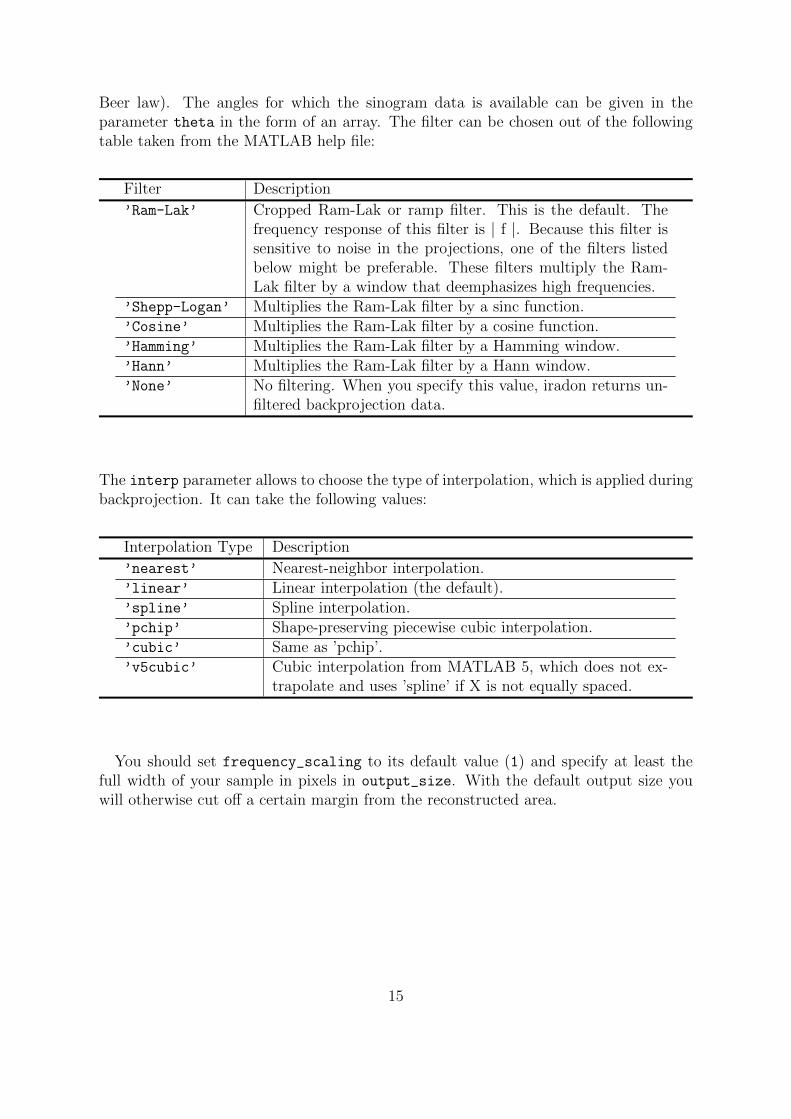
Beer law). The angles for which the sinogram data is available can be given in theparameter theta in the form of an array. The filter can be chosen out of the followingtable taken from the MATLAB help file:
Filter Description
’Ram-Lak’ Cropped Ram-Lak or ramp filter. This is the default. Thefrequency response of this filter is | f |. Because this filter issensitive to noise in the projections, one of the filters listedbelow might be preferable. These filters multiply the Ram-Lak filter by a window that deemphasizes high frequencies.
’Shepp-Logan’ Multiplies the Ram-Lak filter by a sinc function.’Cosine’ Multiplies the Ram-Lak filter by a cosine function.’Hamming’ Multiplies the Ram-Lak filter by a Hamming window.’Hann’ Multiplies the Ram-Lak filter by a Hann window.’None’ No filtering. When you specify this value, iradon returns un-
filtered backprojection data.
The interp parameter allows to choose the type of interpolation, which is applied duringbackprojection. It can take the following values:
Interpolation Type Description
’nearest’ Nearest-neighbor interpolation.’linear’ Linear interpolation (the default).’spline’ Spline interpolation.’pchip’ Shape-preserving piecewise cubic interpolation.’cubic’ Same as ’pchip’.’v5cubic’ Cubic interpolation from MATLAB 5, which does not ex-
trapolate and uses ’spline’ if X is not equally spaced.
You should set frequency_scaling to its default value (1) and specify at least thefull width of your sample in pixels in output_size. With the default output size youwill otherwise cut off a certain margin from the reconstructed area.
15
4 Assignments
4.0 Before you start
Make yourself familiar with the safety instructions (cf. section 6) and the setup, itscomponents and their handling. Ask your tutor, whenever there are uncertainties orquestions of any kind. Please store all your scan files (projections, ...) under C:\scans\and your processed data (tomograms, ...) under C:\processed.
The bold questions in the next paragraphs are meant to lead you in the right di-rections. You don’t need to answer all of them in the report but should think of ananswer as you go along.
4.1 Choosing the Tube Parameters
Remove any sample from the beam and look at the detector without any radiationusing the live_view() function. How and why does the image differ from whatyou expect and how can you correct that? Switch the radiation on with U =65 kV, I = 0.1 mA and look again at the live output. What are the axes in the rightdiagramm? What happens when you expose too long? Check the recordeddetector counts and modify the tube and detector parameters if necessary until thesetup is optimized. After the setup is optimized, record both a dark and a flat imagewhich will be used to correct for the non-ideal detector in the following. Average theseimages over 60 seconds exposure time.
4.2 Prepare your measurement
Take your own sample and place it on the rotation stage. Does it matter whereand how you place it? How can you optimize for measuring time? Whycan we take only half a rotation? Take projections or use the live view for somesuitable angles to determine the scanning parameters for this object and adjust thesetup accordingly. How many angles do you have to acquire in order to fullysample the object? Record one tomographic scan. As soon as this scan has finished,immediately start the next scan.
4.3 Reconstruction Artifacts
For this group of assignments you can either use the tomography of your own sample,or load an already aqcuired measurement that you can find in the examples subfolder.
4.3.1 Effects of a Misaligned Rotation Axis
Load one sinogram of this scan at an interesting height and have a look at it. Whatare the axes? Where is the center of the detector? Where is the rotationaxis? Reconstruct one slice through the sample using the default filter. What do you
16
observe? Find the position of the axis of rotation and crop the sinogram in such away, that the axis of rotation is in the middle of the resulting image. Be sure not tocrop the sinogram edges. Use the correctly cropped sinogram and reconstruct the slicesagain. What has changed? Use the correctly cropped sinogram for the followingassignments.
4.3.2 Reconstruction by Simple Backprojection
Reconstruct the sinogram without using a filter. What do you observe?
4.3.3 Reconstruction with Different Filters
Reconstruct the same slice with each of the remaining available filters. You will createthe following three figures:
1. Line profiles
a) Plot the values along a line (line profile) in the Ram-Lak reconstruction.
b) Using the hold on keyword, add line profiles for each of the remaining filters,using different colors. Leave out the unfiltered reconstruction.
c) Add a descriptive legend and save the figure.
d) Zoom into the figure at an edge, so that you can see the differences betweenthe different filters and save again.
2. Choose either the Hamming or the Hann filtered reconstructed image and zoominto a region of interest (ROI), either using the graphical interface or by croppingthe image using coordinates.
3. Use the same ROI to zoom into the Ram-Lak reconstructed image.
Which difference do you observe in the graphs and the two ROI images?Choose your favorite filter to go on with the following assignments.
4.3.4 Limited Angle Reconstruction
Cut the sinogram, so that the resulting angular range corresponds to the interval [0◦, 90◦].Reconstruct this sinogram and have a look at the reconstruction. What do you ob-serve?
4.3.5 Missing Angle Reconstruction
Cut the sinogram in such a way, that only every twentieth angle is left. Adapt yourreconstruction script and reconstruct this new sinogram. Which artifact occurs andwhy?
17

4.3.6 ROI-CT
Symmetrically cut away portions of the sinogram at the edges, so that the axis of rotationstays in the middle and you keep all angles. Reconstruct again. What do you observe?You can try to cut away more if you don’t see the effect on your first try. Hint: Comparethe image with the previous reconstruction obtained from the full sinogram.
4.4 Beam Hardening
Use the tube container (falcon tube) and fill it with water. Change the tube voltage toU = 50 kV. What about the detector correction? Perform a tomographic scan ofthe tube and reconstruct a single slice. Plot a line profile through the center of the tube.How does this plot differ from what you expect?
4.5 Noise
Rebin the sinogram along the pixel dimension using the rebin function by several dif-ferent factors (e.g. 2, 4, and 8). Reconstruct a single slice of each sinogram and adjustthe output_size to preserve a constant size. Plot one line profile through the center ofthe tube for each binning factor. What do you observe?
4.6 Reconstruct Your Own Sample
Now that you know how to make the perfect reconstruction open a new script file andcollect all neccesary steps to load and reconstruct one slice. Please include a shortdescription of what you scanned and observed after reconstruction in your report.
4.6.1 Extend the Reconstruction Script to Allow Reconstructions of a CompleteVolume
Extend your script to reconstruct not only a single slice of your sample, but a largercomplete volume of interest (VOI). Decide if you want to rebin the data or want to do ahigh resolution tomography (Depending on the noise and attenuation of the sample bothis possible). Be sure to normalize the image to the the range of the .png file format.Use the sprintf function together with a suitable format code to store the slices of thetotal volume with filenames containing a numerical index right before the suffix. Yourscript will require some time to run. Usually, it takes at least the whole night and youcan fetch your data on the following day.
Visualize the results with drishti, which is freely available online from
http://anusf.anu.edu.au/Vizlab/drishti/.
You first need to create a drishti project file for the slices of your reconstruction. This isdone with drishti-import by reading in the files and saving them as a drishti projectfile. Afterwards you can display the complete volume with drishti and modify itsappearance. Add an interesting ”3D” view to your report.
18
5 Report
The experimental report should contain
� a short explanation of the theoretical background,
� details about the experimental realization,
� a short description of the performed experiments,
� and a critical discussion of the results.
It should be written in a style that is easily understandable by a person trained inphysics.
6 Safety Instructions
� Keep the doors of the experimental hutch closed at all times x-rays are generated.The interlock system in general only allows the production of x-rays when thedoors are closed. A red light on top of the hutch indicates that the productionof x-rays is possible. Do not close the two door switches manually. This will closethe interlock and x-rays may be produced. In case the red safety light is on andthe hutch is open, shut the doors immediately, switch the tube off at the computerand seek assistance.
� The shielding of the hutch contains lead, which is toxic. Do not inhale or swallow!Inside the hutch several additional lead parts are mounted to improve the shielding.As lead is very flexible try not to manipulate any of these.
� Whenever you want to open the experimental hutch, please switch off the produc-tion of x-rays from the software first.
� The x-ray tube has an exit window made of beryllium, which is poisonous.Do not try to manipulate or touch this exit window and do not inhale berylliumdust or fumes.
� USE IN CASE OF EMERGENCY ONLY!!! The setup has an emergency stopwhich is the switch of the multiple socket below the hutch. Switch it off (from I to0) to stop the power of the tube, detector and rotation stage.
7 References
[1] Avinash C. Kak and Malcolm Slaney. Principles of computerized tomographic imaging.IEEE Press, 1999.
[2] Avinash C. Kak and Malcolm Slaney. Principles of computerized tomographic imaging.http://epubs.siam.org/doi/book/10.1137/1.9780898719277, 2001.
19
[3] MathWorks. Matlab – the language of technical computing – videos and examples.http://www.mathworks.co.uk/products/matlab/examples.html, Sep 2012.
[4] M.J. Berger, J.H. Hubbell, S.M. Seltzer, J. Chang, J.S. Coursey, R. Suku-mar, D.S. Zucker, and K. Olsen. Xcom: Photon cross sections database.http://www.nist.gov/pml/data/xcom/, Mar 1998.
[5] J. H. Hubbell and S. M. Seltzer. Tables of x-ray mass attenuation coefficients and massenergy-absorption coefficients from 1 keV to 20 MeV for elements z = 1 to 92 and 48additional substances of dosimetric interest. http://www.nist.gov/pml/data/xcom/, Mar1998.
[6] Thorsten M. Buzug. Computed Tomography, From Photon Statistics to Modern Cone-BeamCT. Springer Verlag, Berlin Heidelberg, 2008.
[7] Willi A. Kalender. Computed Tomography. 2005.
[8] Alfred K. Louis. Optimal reconstruction kernels in medical imaging. In Carlos J.S. Alves,Panos M. Pardalos, and Luis Nunes Vicente, editors, Optimization in Medicine, volume 12of Springer Optimization and Its Applications, pages 153–168. Springer New York, 2008.
[9] Alfred K. Louis. Optimal reconstruction kernels in medical imaging. http://www.num.uni-sb.de/iam/veroeffentlichungen/downloads/fachartikel/Optimal reconstruction kernels inmedical imaging.pdf, 2007.
20





























