Survey Sensors Hydrofest 2014
Ross Leitch Project Surveyor
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
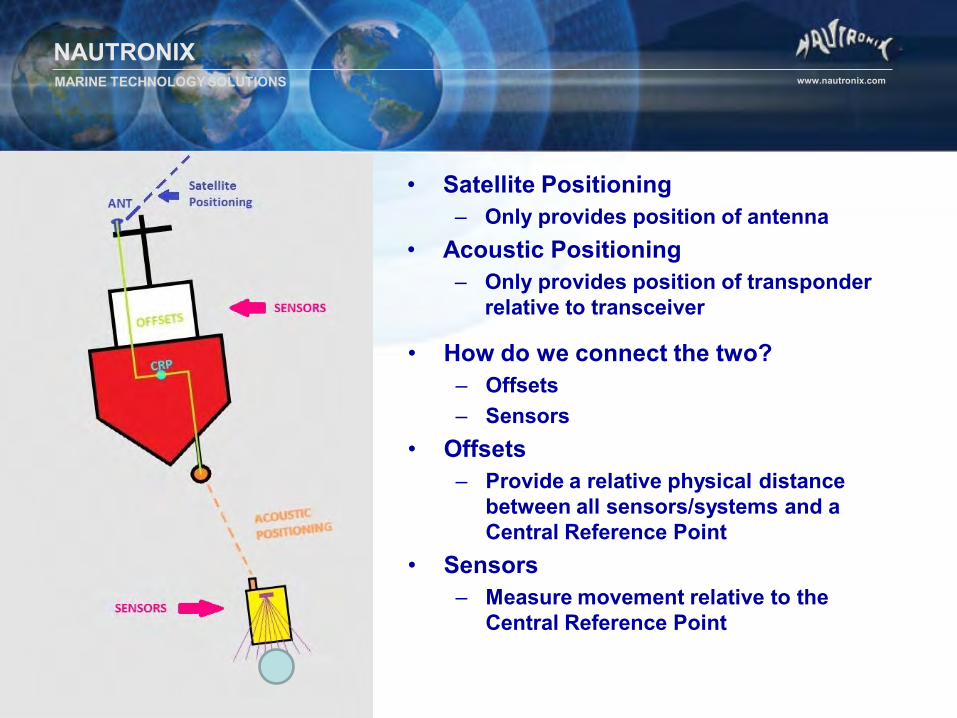
• Satellite Positioning – Only provides position of antenna
• Acoustic Positioning – Only provides position of transponder
relative to transceiver
• How do we connect the two? – Offsets – Sensors
• Offsets – Provide a relative physical distance
between all sensors/systems and a Central Reference Point
• Sensors – Measure movement relative to the
Central Reference Point

VESSELS & VEHICLES

NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
Construction Vessels
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
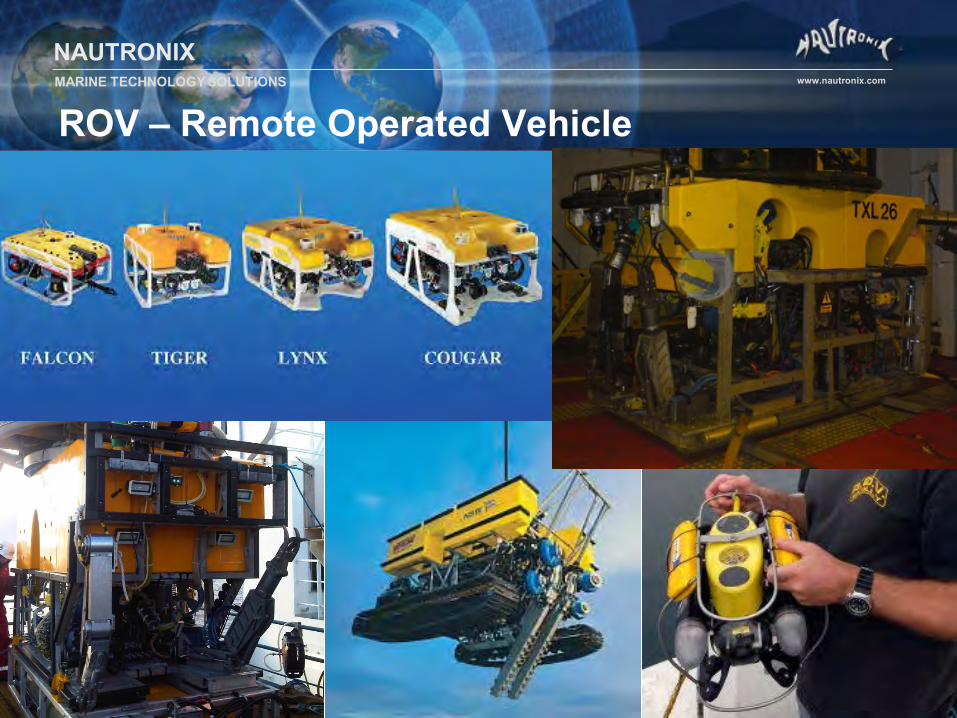
ROV – Remote Operated Vehicle
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
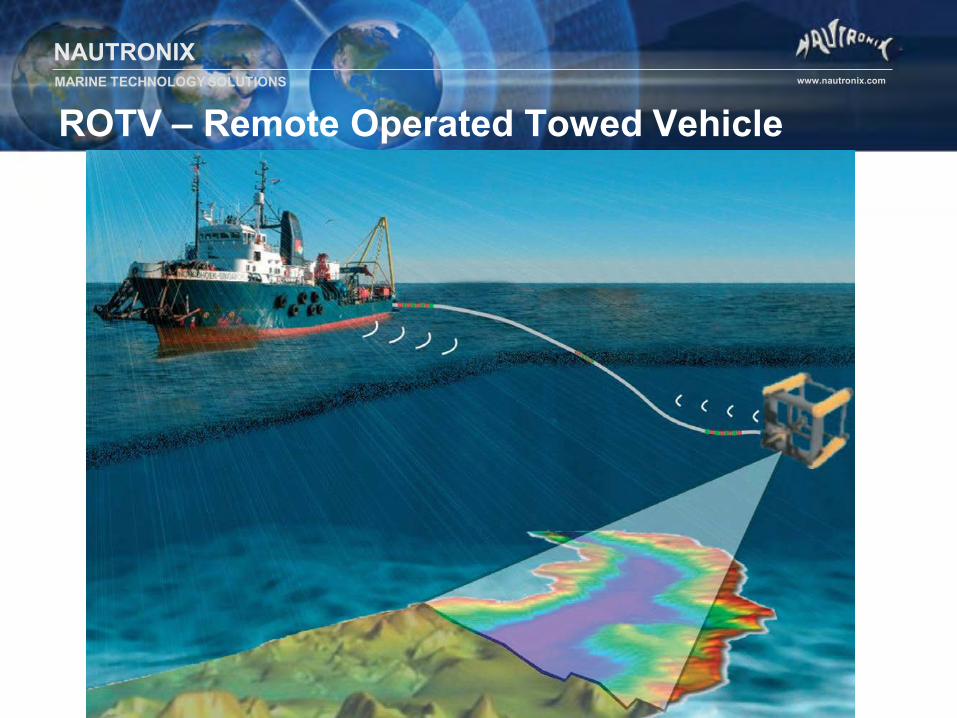
ROTV – Remote Operated Towed Vehicle
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
AUV – Autonomous Underwater Vehicle
SURVEY SENSORS
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
Survey Sensors • Positioning Systems
– Surface Positioning – Acoustic Positioning
• Attitude Systems – Gyro Compass – Motion Reference Unit
• SVP – Sound Velocity Probe • Inertial Navigation Systems • Doppler Velocity Log • Depth Sensor • Cross-Profilers, Singlebeam & Multibeam Echo sounders • Pipetracker • Side Scan Sonar
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
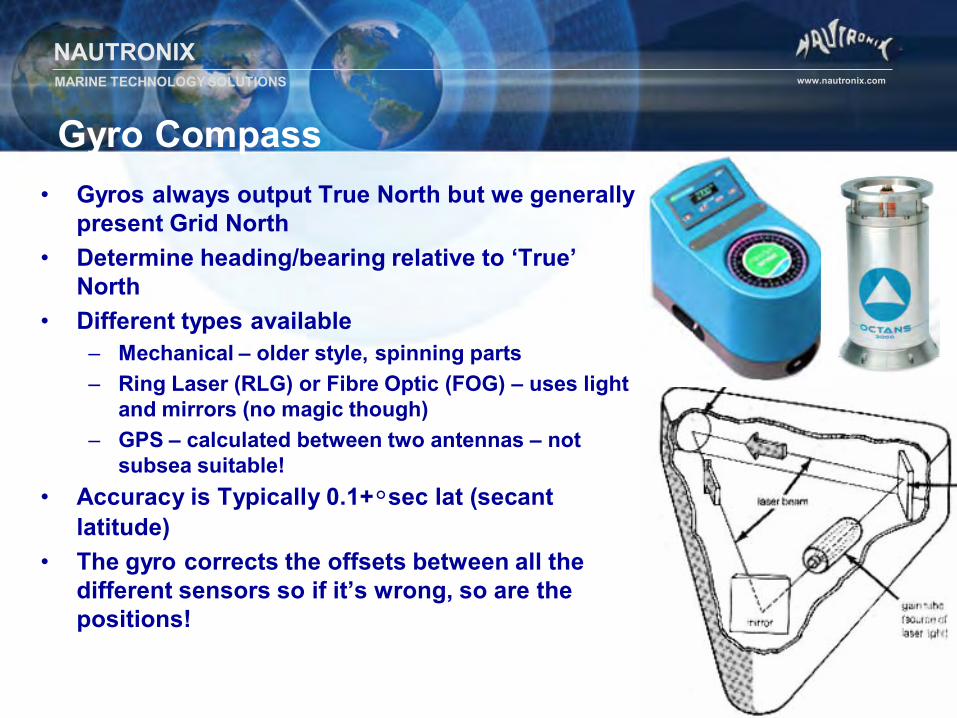
• Gyros always output True North but we generally present Grid North
• Determine heading/bearing relative to ‘True’ North
• Different types available – Mechanical – older style, spinning parts – Ring Laser (RLG) or Fibre Optic (FOG) – uses light
and mirrors (no magic though) – GPS – calculated between two antennas – not
subsea suitable! • Accuracy is Typically 0.1+°sec lat (secant
latitude) • The gyro corrects the offsets between all the
different sensors so if it’s wrong, so are the positions!
Gyro Compass
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
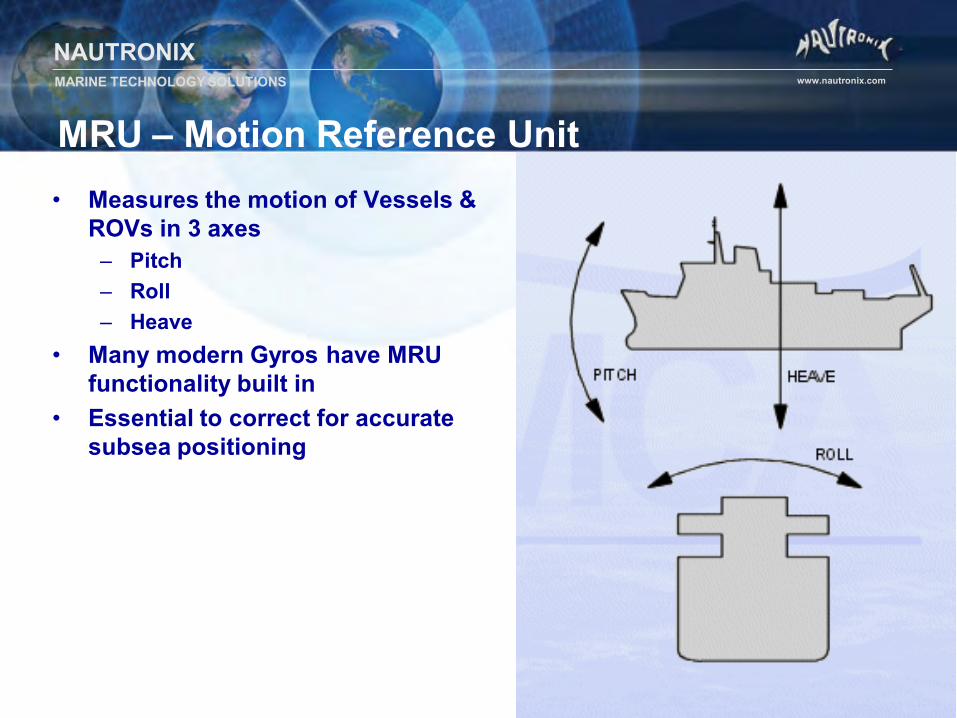
MRU – Motion Reference Unit • Measures the motion of Vessels &
ROVs in 3 axes – Pitch – Roll – Heave
• Many modern Gyros have MRU functionality built in
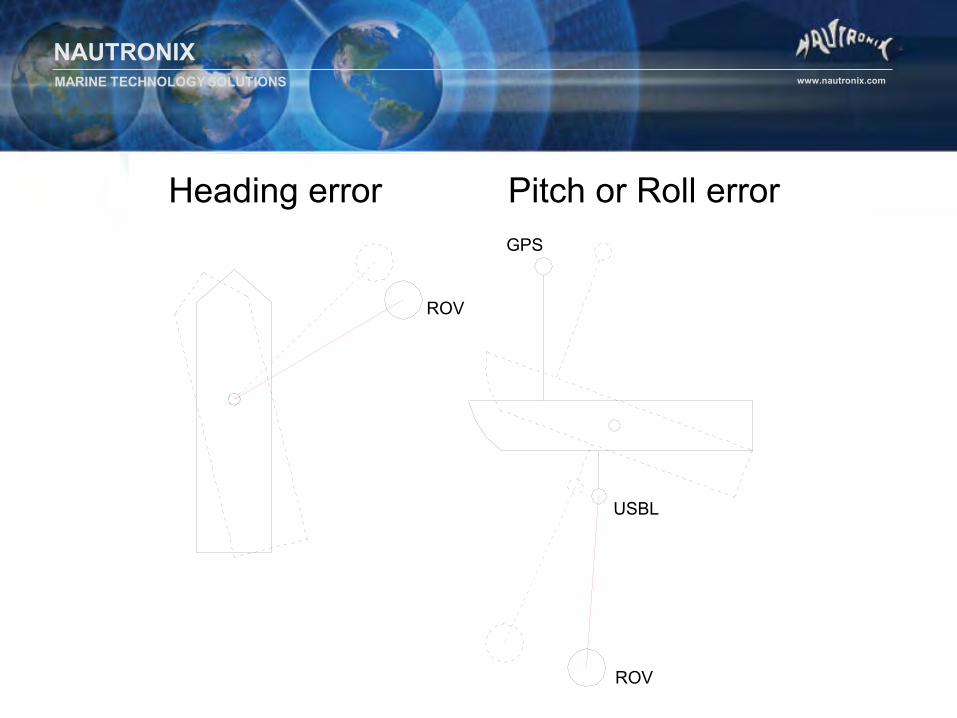
• Essential to correct for accurate subsea positioning
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
GPS
USBL
ROV
ROV
Heading error Pitch or Roll error
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
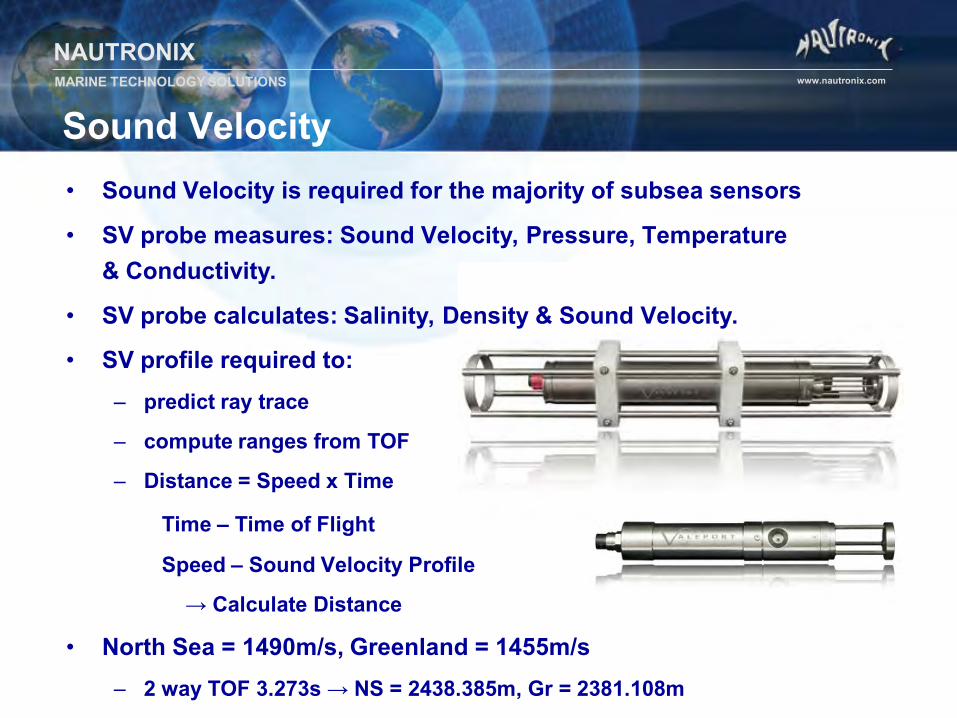
Sound Velocity • Sound Velocity is required for the majority of subsea sensors
• SV probe measures: Sound Velocity, Pressure, Temperature & Conductivity.
• SV probe calculates: Salinity, Density & Sound Velocity.
• SV profile required to: – predict ray trace
– compute ranges from TOF
– Distance = Speed x Time
Time – Time of Flight
Speed – Sound Velocity Profile
→ Calculate Distance
• North Sea = 1490m/s, Greenland = 1455m/s – 2 way TOF 3.273s → NS = 2438.385m, Gr = 2381.108m
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
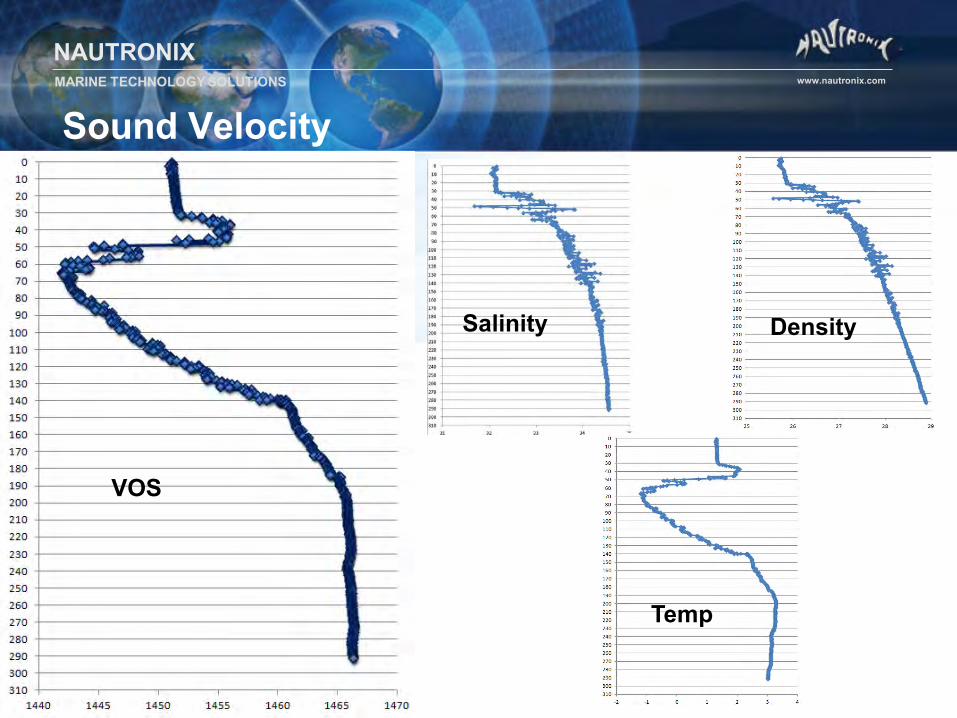
Sound Velocity
Salinity Density
VOS
Temp
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
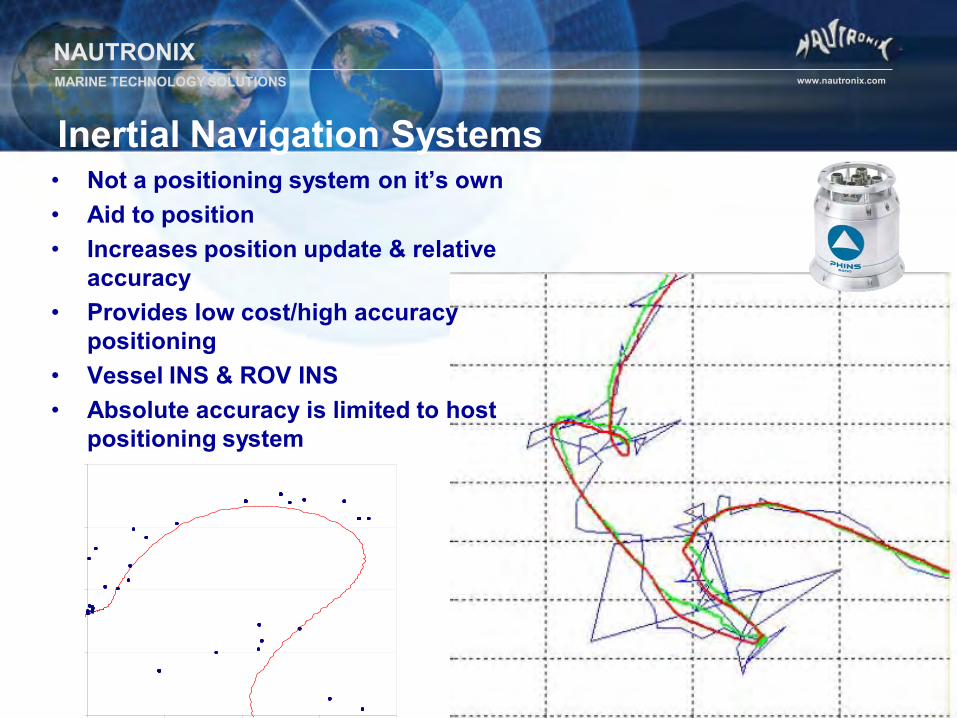
Inertial Navigation Systems
• Not a positioning system on it’s own • Aid to position • Increases position update & relative
accuracy • Provides low cost/high accuracy
positioning • Vessel INS & ROV INS • Absolute accuracy is limited to host
positioning system
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
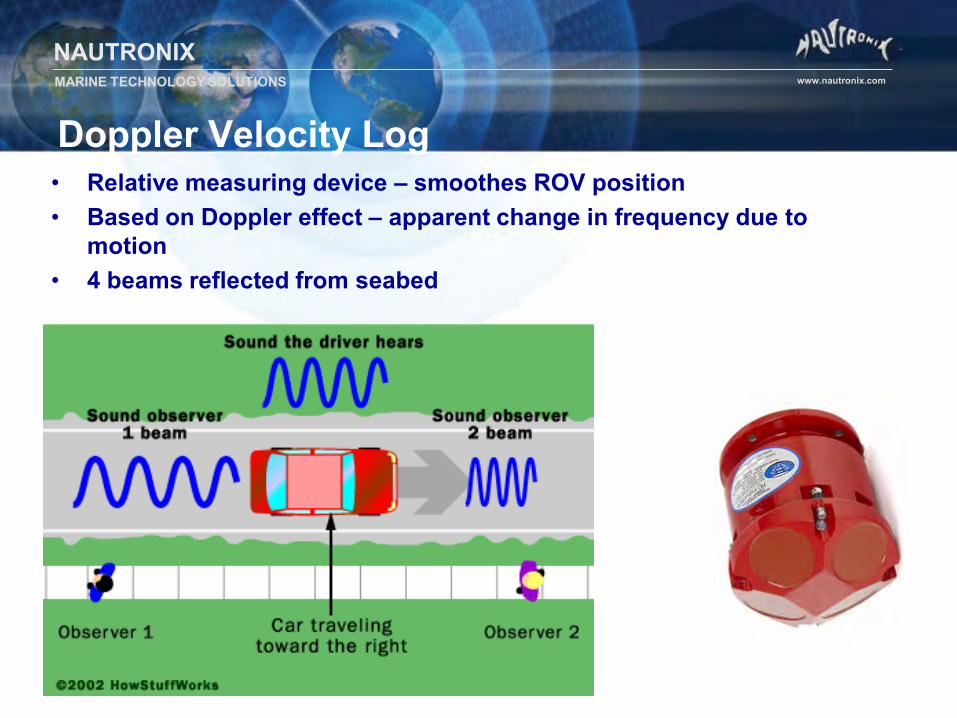
Doppler Velocity Log • Relative measuring device – smoothes ROV position • Based on Doppler effect – apparent change in frequency due to
motion • 4 beams reflected from seabed

NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
Depth Sensors • Depth Sensor combined with altimeter • Quartz Crystal vibrating under pressure • Pressure output (PSI, Bar etc) • Conversion to depth uses
– Gravity (changes depending on latitude) – Density of local seawater – Atmospheric pressure
• Accuracy - typically 0.01% FSR (Full Scale Range) e.g. 0.07m for 700m sensor
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
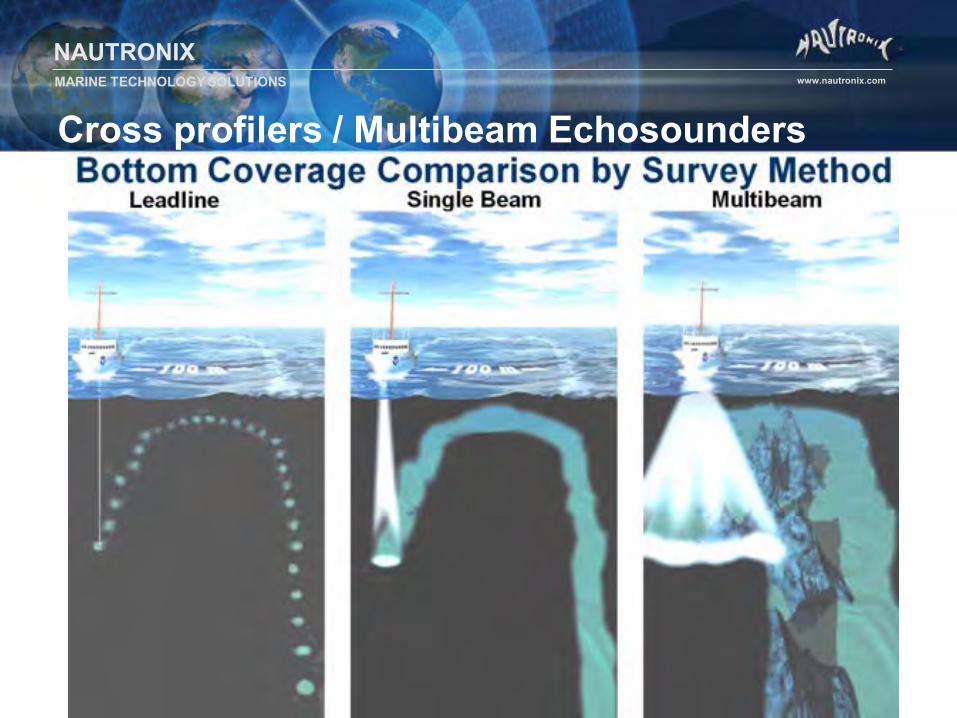
Bathymetry • “Sounding” originates from Old English meaning “the sea” or “to swim”
and does not imply the use of sound pulses • Historically a sounding line (leadline) would be used which provided
− Depth − Seabed Information
• The combination of accurate positioning and accurate depth allows the generation of bathymetry charts and seabed terrain models
• Acoustic systems allow data to be collected quickly and efficiently
• Echosounders − Singlebeam − Multibeam
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
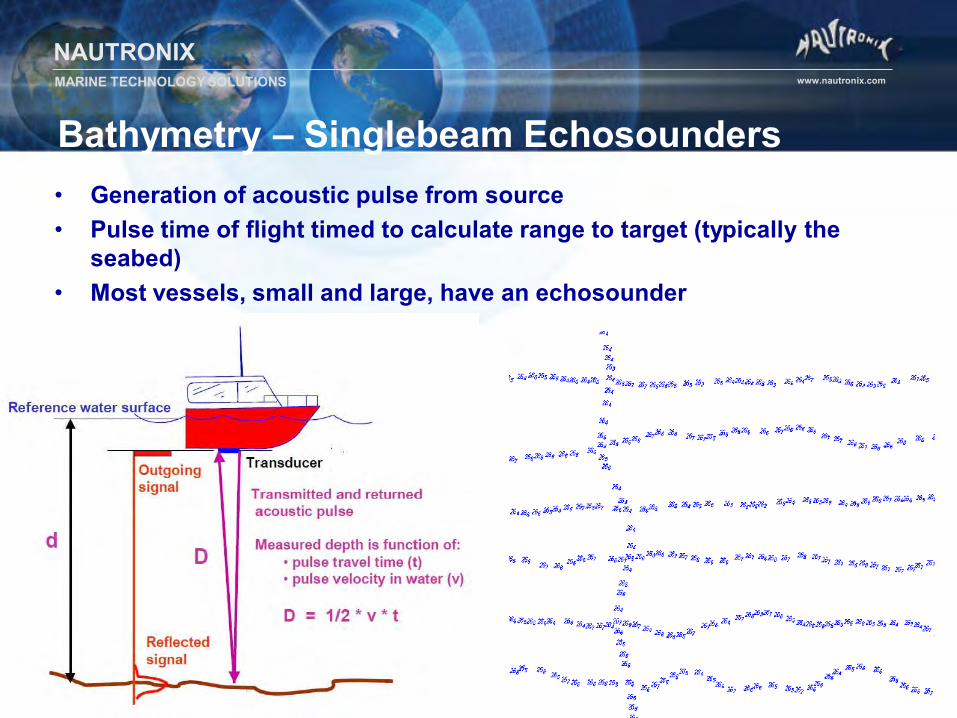
Bathymetry – Singlebeam Echosounders • Generation of acoustic pulse from source • Pulse time of flight timed to calculate range to target (typically the
seabed) • Most vessels, small and large, have an echosounder
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
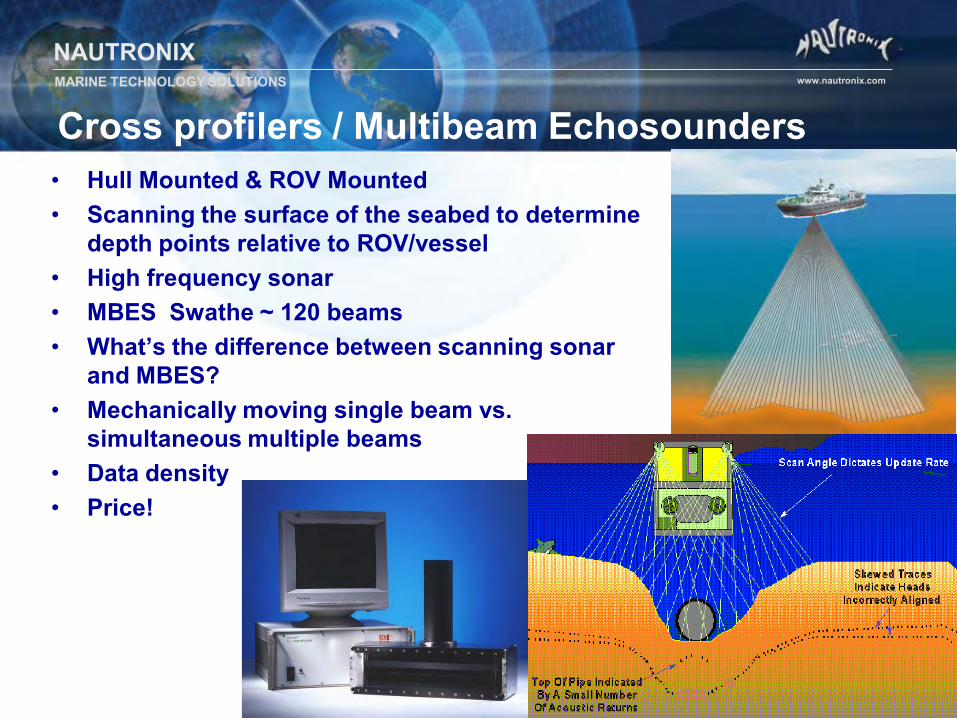
Cross profilers / Multibeam Echosounders • Hull Mounted & ROV Mounted • Scanning the surface of the seabed to determine
depth points relative to ROV/vessel • High frequency sonar • MBES Swathe ~ 120 beams • What’s the difference between scanning sonar
and MBES? • Mechanically moving single beam vs.
simultaneous multiple beams • Data density • Price!
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
Cross profilers / Multibeam Echosounders
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
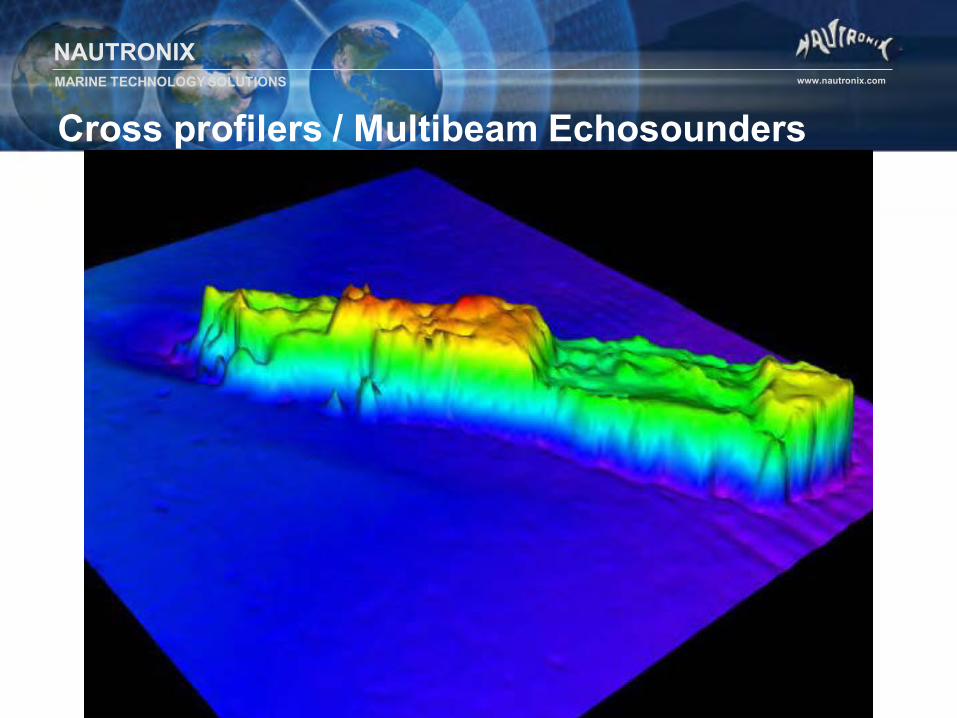
Cross profilers / Multibeam Echosounders
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
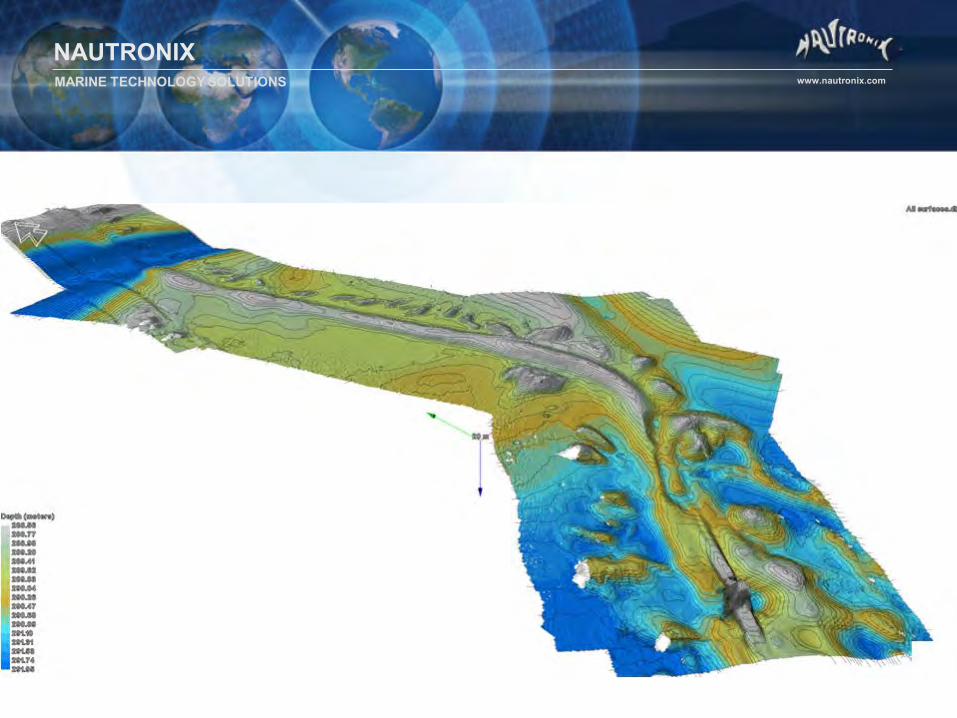
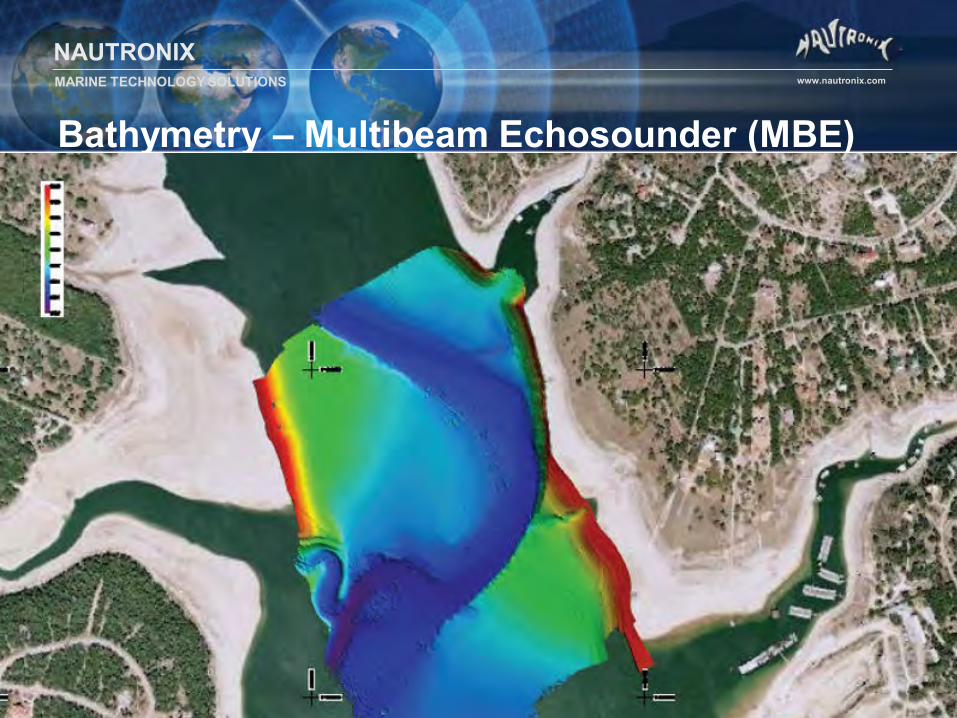
Bathymetry – Multibeam Echosounder (MBE)
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
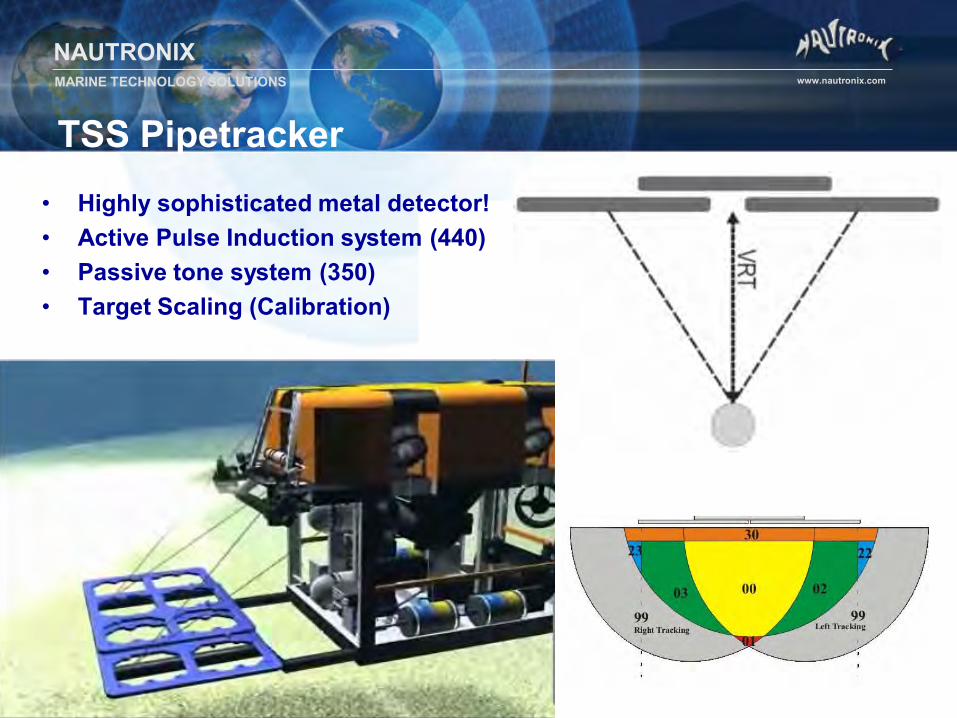
TSS Pipetracker • Highly sophisticated metal detector! • Active Pulse Induction system (440) • Passive tone system (350) • Target Scaling (Calibration)
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
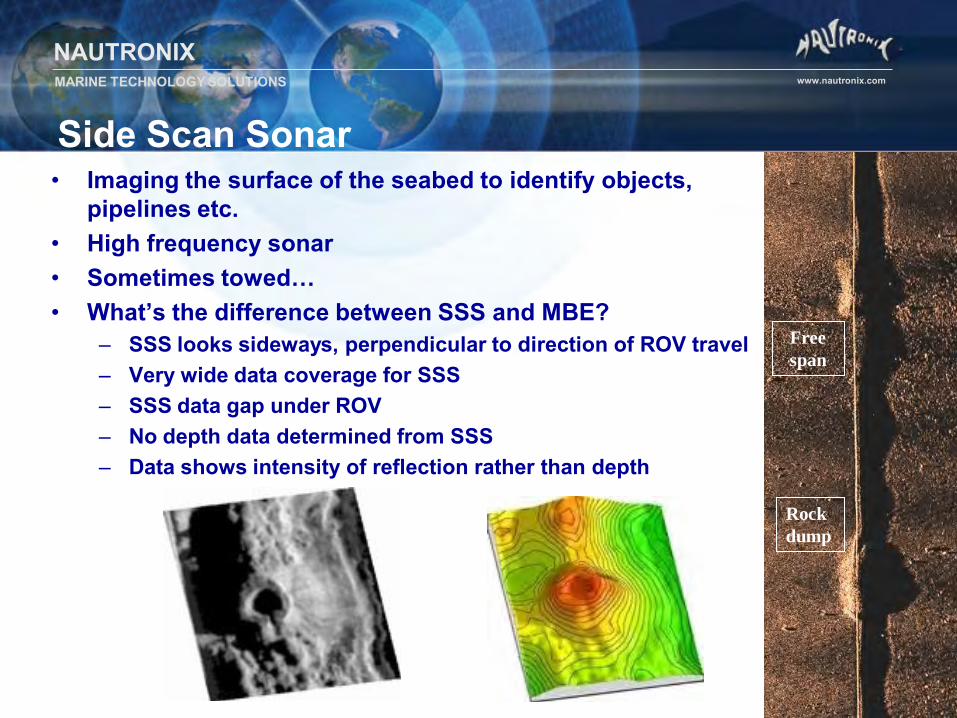
Side Scan Sonar • Imaging the surface of the seabed to identify objects,
pipelines etc. • High frequency sonar • Sometimes towed… • What’s the difference between SSS and MBE?
– SSS looks sideways, perpendicular to direction of ROV travel – Very wide data coverage for SSS – SSS data gap under ROV – No depth data determined from SSS – Data shows intensity of reflection rather than depth
Free span
Rock dump
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
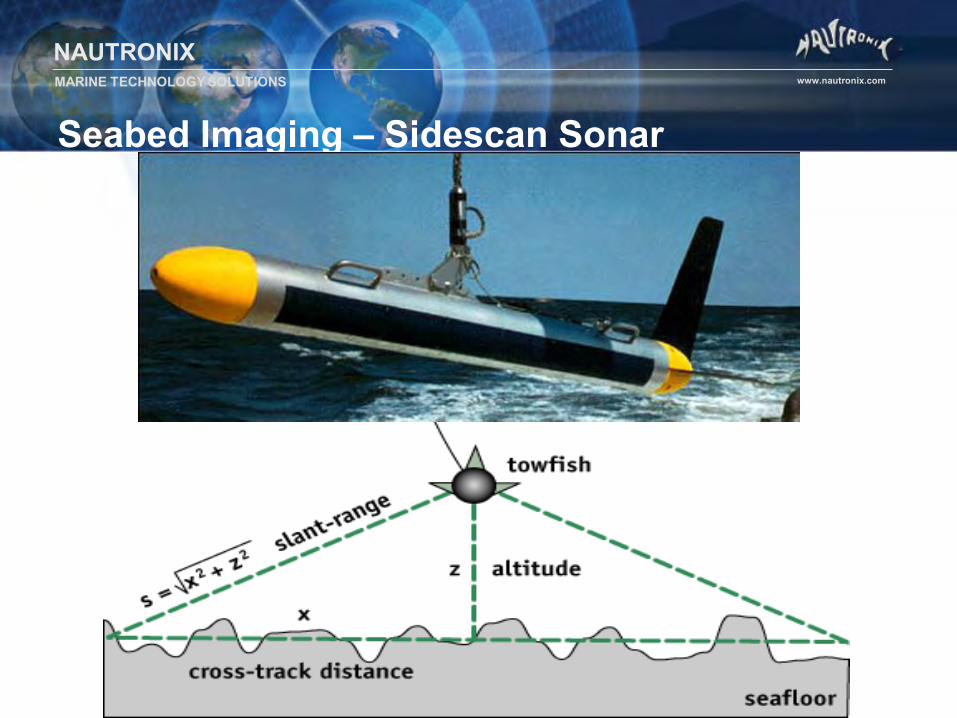
Seabed Imaging – Sidescan Sonar

NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
Geotechnical Survey (Brief overview) •Additional sensors − Sub-bottom information can also be
gathered using additional sensors • Sub-bottom profiler
−Fish, ROV or AUV mounted −Can identify layers within the seabed
• Magnetometer − Used to identify features with a
magnetic return such as submerged metal structures or rock formations with a magnetic signature
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
Survey Navigation Packages • Three main survey suites
– EIVA / NaviPac – Quincy – Starfix.Nav, .Seis, .NG
• All survey software does the following
– Interfaces to survey sensors – Logs data – Defines objects or “vehicles” for sensors to be referenced to – Takes WGS84 (GPS) positions and converts to local ellipsoid and grid – Displays objects on a screen including background graphics and vehicles
• Problem - As data density and data collection speed increases so
does the need for fast update rates and accurate time stamping of data • Prime example is multibeam echosounder and AUV data.
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS www.nautronix.com
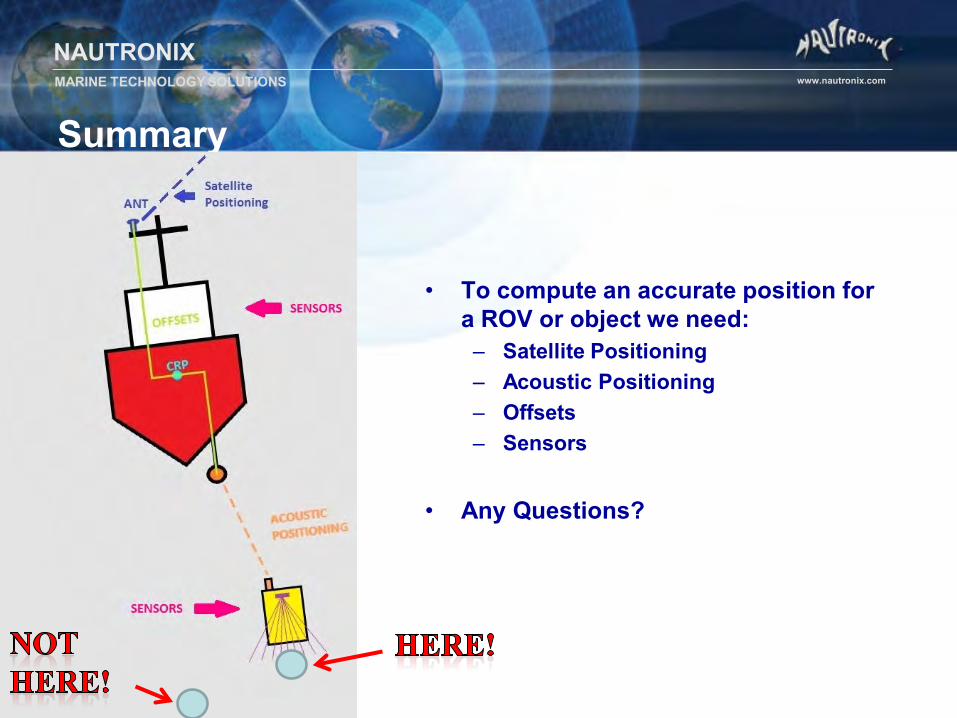
Summary
• To compute an accurate position for a ROV or object we need: – Satellite Positioning – Acoustic Positioning – Offsets – Sensors
• Any Questions?
Recommended

















