用途事例
シーケンス機能
FR Configurator2接続例
標準仕様
外形寸法図
端子結線図
端子仕様説明
操作パネル
パラメータリスト
パラメータの説明
保護機能
オプション
注意事項
モータ
互換性
価 格
保証・問合せ
特 長
パラメータを設定する場合は、取扱説明書(詳細編)を参照の上、注意事項などをご理解の上設定してください。 86
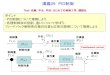
• 最大アナログ入力時の周波数(速度)を変更する。(Pr.125、Pr.126、C14(Pr.918))最大アナログ入力電圧(電流)の周波数設定(ゲイン)のみ変更する場合は、Pr.125(Pr.126、C14(Pr.918))に設定します。(その他の校正パラメータの設定を変更する必要はありません)
• 最大アナログ入力時のトルク /磁束を変更する。(C18(Pr.920)、C40(Pr.933))最大アナログ入力電圧(電流)のトルク /磁束指令のみ変更する場合は、C18(Pr.920)、C40(Pr.933)に設定します。(その他の校正パラメータの設定を変更する必要はありません)
• アナログ入力バイアス・ゲインの校正(C2(Pr.902) ~C7(Pr.905)、C16(Pr.919)~ C19(Pr.920)、C38(Pr.932)~ C41(Pr.933))出力周波数(トルク /磁束)を設定するために外部より入力されるDC0 ~ 5V/ 0~ 10Vまたは、DC4 ~ 20mAなどの設定入力信号と出力周波数(トルク /磁束)の関係を調整するのが、「バイアス」・「ゲイン」機能です。
• アナログ入力表示単位の切換え(Pr.241)アナログ入力バイアス・ゲイン校正時のアナログ入力表示単位(%/V/mA)を切り換えることができます。
PID制御インバータで流量、風量または圧力などのプロセス制御を行うことができます。パラメータユニット (FR-PU07)を使用している場合、PID制御に関するパラメータ、モニタの表示単位を様々な単位に変更できます。端子 2入力信号あるいは、パラメータ設定値を目標とし、端子 4入力信号をフィードバック量としてフィードバック系を構成し PID制御します。・ Pr.128 =“10、11”(偏差値信号入力)
・ Pr.128 =“20、21”(測定値入力)
第 2PID 機能を設定すると、2種類の PID 機能を切り換えて使用することができます。ダンサ制御
Pr.128 PID 動作選択 PID 動作選択 を 40 ~ 43 に設定することでダンサ制御を行います。主速指令は各運転モード(外部、PU、通信)の速度指令となります。ダンサロールの位置検出信号より PID制御を行い、主速指令に加算します。主速の加減速時間は加速時間:Pr.44 第 2加減速時間、減速時間:Pr.45 第 2 減速時間 に設定します。
60Hz(50Hz)
出力周波数(Hz)
0
0 周波数設定信号
100%
10V
初期値
バイアス
0 5V
Pr.125C14(Pr.918)
ゲイン
0 20mA
C2(Pr.902)C12(Pr.917)
C3(Pr.902)C13(Pr.917)
C4(Pr.903)C15(Pr.918)
60Hz(50Hz)
出力周波数(Hz)
Pr.126
0
周波数設定信号
100%
初期値
バイアスゲイン
0204 20mA
C5(Pr.904)
C6(Pr.904) C7(Pr.905)
0 1 5V0 2 10V
端子1の校正例
400
150
-150
0
0 トルク設定信号100%
10V
初期値バイアス
0 5V
(-5V)
-100%(-10V)
C18(Pr.920)ゲイン
トルク(%)
C16(Pr.919)
C17(Pr.919) C19(Pr.920)
*1
400
150
0
トルク設定信号
100%
バイアス
0204 20mA
トルク(%)
初期値
C40(Pr.933)
ゲイン
C38(Pr.932)
C39(Pr.932) C41(Pr.933)
端子4の校正例
PID 制御、ダンサ制御
名称 名称
127 A612 PID 制御自動切換周波数 128 A610 PID 動作選択129 A613 PID 比例帯 130 A614 PID 積分時間131 A601 PID 上限リミット 132 A602 PID 下限リミット133 A611 PID 動作目標値 134 A615 PID 微分時間553 A603 PID 偏差リミット 554 A604 PID 信号動作選択575 A621 出力中断検出時間 576 A622 出力中断検出レベル577 A623 出力中断解除レベル 609 A624 PID 目標値 /偏差入力選択610 A625 PID 測定値入力選択 753 A650 第 2PID 動作選択754 A652 第 2PID 制御自動切換周波数 755 A651 第 2PID 動作目標値756 A653 第 2PID 比例帯 757 A654 第 2PID 積分時間
758 A655 第 2PID 微分時間 1140 A664 第 2PID 目標値 /偏差入力選択C42(934) A630 PID 表示バイアス係数
C43(934) A631
PID 表示バイアスアナログ値
C44(935) A632 PID 表示ゲイン係数
C45(935) A633 PID 表示ゲインアナログ値
1141 A665 第 2PID 測定値入力選択 1142 A640 第 2PID 単位選択1143 A641 第 2PID 上限リミット 1144 A642 第 2PID 下限リミット1145 A643 第 2PID 偏差リミット 1146 A644 第 2PID 信号動作選択1147 A661 第 2 出力中断検出時間 1148 A662 第 2出力中断検出レベル1149 A663 第 2出力中断解除レベル 759 A600 PID 単位選択1134 A605 PID 上限操作量 1135 A606 PID 下限操作量
1136 A670 第 2PID 表示バイアス係数 1137 A671 第 2PID 表示バイアスアナログ値
1138 A672 第 2PID 表示ゲイン係数 1139 A673 第 2PID 表示ゲインアナログ値44 F020 第 2 加減速時間 45 F021 第 2 減速時間
Pr. GROUP Pr. GROUP
+- M偏差信号
フィードバック信号(測定値)
Ti×S 11+ +Td×SKp
PID演算
外部へ
目標値
インバータ回路モータ
端子1DC0~±10V(0~±5V)
Kp:比例定数 Ti:積分時間 S:演算子 Td:微分時間
操作量∗1
+- MTi×SKp 1+ +Td×S1PID演算 Pr.133または
端子2目標値
インバータ回路モータ
フィードバック信号(測定値)端子4
Kp:比例定数 Ti:積分時間 S:演算子 Td:微分時間
操作量
DC0~5V(0~10V、4~20mA)
DC4~20mA(0~5V、0~10V)∗3
∗2
STF
PID加算値
主速
ON
出力周波数
時間
出力周波数
Recommended