Embed Size (px)
Citation preview

E6581878①
TOSVERT VF-S15
PID制御機能説明書

E6581878①
1
- 目次 -
1. はじめに ........................................................................................................................................... 2
2. PID制御の選択 ........................................................................................................................ 3
2.1. プロセス型PID制御 .................................................................................................................................... 3 2.2. 速度型PID制御 .............................................................................................................................................. 5
3. PID制御関連のパラメータ................................................................................................ 7
4. PID制御の設定 ................................................................................................................... 10
4.1. 基本設定 ............................................................................................................................................................. 10 4.1.1. フィードバック値の設定 .................................................................................................. 10 4.1.2. 目標値の設定 ........................................................................................................................... 12 4.1.3. オーバライド機能 ................................................................................................................. 16 4.1.4. 加減速時間 ................................................................................................................................ 16
4.2. モータに合わせて設定 ............................................................................................................................... 17 4.3. システムに合わせて設定........................................................................................................................... 17
4.3.1. システムで必要な場合に設定する ............................................................................... 17 4.3.2. PIDの正逆特性を切換える ......................................................................................... 17 4.3.3. 目標値とフィードバック値一致信号出力 ................................................................ 18 4.3.4. PID制御から周波数指令運転への切換え............................................................ 18
5. PID制御の調整パラメータ........................................................................................... 19
5.1. 調整概要 ............................................................................................................................................................. 19 5.2. 基本調整(共通) ......................................................................................................................................... 19
5.2.1. 比例(P)ゲイン ................................................................................................................. 20 5.2.2. 積分(I)ゲイン ................................................................................................................. 20 5.2.3. 微分(D)ゲイン ................................................................................................................. 20
5.3. 応用調整(共通) ......................................................................................................................................... 21 5.3.1. PID制御の微分・積分リセット ............................................................................... 21 5.3.2. PID制御開始待ち時間 .................................................................................................. 21
5.4. 応用調整(速度型PID制御のみ) .................................................................................................. 22 5.4.1. 遅れフィルタ ........................................................................................................................... 22 5.4.2. 目標値増レート・減レート.............................................................................................. 22
6. アナログ入力特性 ................................................................................................................... 23

E6581878①
2
1. はじめに
VF-S15 は、PID制御機能を搭載しています。
用途に合わせて、制御を選択することができます。
・プロセス型PID制御:風水力機械の温度、圧力などの緩やかな応答を行うPID制御
・速度型PID制御 :巻取りシステムの定周速制御などの高速応答を行うPID制御
本書は以下の構成としています。
第2章:2種類の制御方式について説明してします。
第3章:PID制御に関するパラメータの一覧です。
第4章:PID制御機能を使用するにあたり、設定が必要な各パラメータを説明しています。
第5章:PID制御の調整用パラメータ(応答性など)を説明しています。
第6章:アナログ入力(目標値やフィードバック値)の設定について説明しています。
目標値などは、周波数に換算して設定します。
第2章で、ご使用になる制御方式の概要を確認してください。
第3章~第6章では、各パラメータの詳細を説明していますので、設定や調整に必要な内容を参照し
てください。
■取扱説明書(E6581612),詳細編(E6581610)表記について
改定されるまでは、用語につき以下表を参考としてください。
該当箇所 誤 正
6.24 プロセス量 目標値
6.24 周波数一致 目標値一致
6.24,11 F167:周波数指令一致検出幅 F167:目標値一致検出幅
6.24,11 F389:PID制御リファレンス信号選択 F389:PID制御目標値信号選択
11.7 機能番号144(145)
周波数指令一致信号(反転)
F389で指定される周波数指令
機能番号144(145)
PID制御目標値一致信号(反転)
F389で指定される目標値

E6581878①
3
2. PID制御の選択
用途に合わせて、2種類のPID制御方式から選択します。
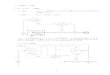
2.1.プロセス型PID制御
風水力機械の、風量、流量、温度、圧力などを制御する場合に使用します。
PID制御 f360=1:プロセス型PID制御
<概略ブロック図>
<パラメータ設定手順>
各パラメータ設定の詳細は、第4章、第5章を参照してください。
1)目標値、フィードバック値の入力先を決定します。
温度や圧力等のレベルを、周波数に換算して設定します。
内 容 タイトル 機 能
目標値 f389 PID制御目標値信号選択
fpid PID制御目標値
(f389=3の設定で有効)
フィードバック値 f369 PID制御フィードバック信号選択
・目標値、フィードバック値は、単位変換機能を使用すると、周波数に換算する必要が
ありません。詳細は第3章を参照してください。
2)使用するモータに合わせて、下記を設定します。
(必要なパラメータのみ設定してください。)
タイトル 機 能
fh 最高周波数
ul 上限周波数
ll 下限周波数
f270~f275
ジャンプ周波数1~3
f240
始動周波数
f241 運転開始周波数
PID制御 ジャンプ゚ 周波数処理
( ul )
出力周波数下限リミット
( ll )
目標値上限リミット ( f367 )
目標値下限リミット ( f368 )
-
目標値
フィードバック値
増減レート (acc,dec)
PID正逆特性
(f380)
出力周波数上限リミット

E6581878①
4
3)システムに合わせて、PID制御の設定をします。
①加減速時間(acc、dec)は、応答性を良くするために、トリップしない範囲で短く設定し
ます。
タイトル 機 能
acc 加速時間1
dec 減速時間1
②必要に応じて設定します。
内 容 タイトル 機 能
目標値の入力範囲を
制限する
f367 目標値の上限リミット
f368 目標値の下限リミット
PID出力の正逆特性を設
定する、切換える
f380 PID正逆特性選択
入力端子機能:54/55(PIDの特性切換え)
目標値とフィードバック値
一致信号の出力
f167 目標値一致検出幅
出力端子機能:144/145(目標値一致信号)
4)PID制御のゲインを調整します。
詳細は第 5 章を参照してください。
①基本調整をします。
内 容 タイトル 機 能
PID制御ゲイン調整 f362 比例ゲイン f363 積分ゲイン f366 微分ゲイン
②システムで必要がある場合に調整します。
内 容 タイトル 機 能
安定してからPID制御を
開始する
f359 PID制御開始待ち時間

E6581878①
5
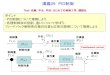
2.2.速度型PID制御
巻取りシステムの定周速制御など、高速応答が必要な制御に使用します。
加減速時間は自動的に最短に設定されます。また加減速時間と分離した増/減レートで制御する
ことで、より高速応答に対応します。
制御を安定させるために、フィードバック値に一次遅れフィルタを設けています。
PID制御 f360=2:速度型PID制御
<概略ブロック図>
<パラメータ設定手順>
各パラメータ設定の詳細は、第4章、第 5 章を参照してください。
1)目標値、フィードバック値の入力先を決定します。
張力等のレベルを、周波数に換算して設定します。
内 容 タイトル 機 能
目標値 f389 PID制御目標値信号選択
fpid PID制御目標値
(f389=3の設定で有効)
フィードバック値 f369 PID制御フィードバック信号選択
・目標値、フィードバック値は、単位変換機能を使用すると、周波数に換算する必要が
ありません。詳細は第3章を参照してください。
・目標値に対して、オーバーライド機能で加算・乗算することができます。
内 容 タイトル 機 能
加算 f660 オーバライド加算入力選択
乗算 f661 オーバライド乗算入力選択
出力周波数 上限リミット (ul)
PID制御
遅れフィルタ(f361)
ジャンプ゚
周波数処理
出力周波数 下限リミット (ll)
目標値上限リミット (f367)
目標値下限リミット (f368)
-
目標値
フィードバック値
増減レート (f372,f373)
PID正逆特性
(f380)

E6581878①
6
2)使用するモータに合わせて、下記を設定します。
(必要なパラメータのみ設定してください。)
タイトル 機 能
fh 最高周波数
ul 上限周波数
ll 下限周波数
f270~f275
ジャンプ周波数1~3
f240
始動周波数
f241 運転開始周波数
3)システムに合わせて、PID制御の設定をします。
速度型PID制御の加減速時間は、加減速時間(acc、dec)の設定に関わらず、自動的に
最短設定となります。
また加減速時間と分離した増/減レートで制御することで、より高速応答に対応します。
必要に応じて設定します。
内 容 タイトル 機 能
目標値の入力範囲を
制限する
f367 目標値の上限リミット
f368 目標値の下限リミット
目標値とフィードバック値
一致信号の出力
f167 目標値一致検出幅
出力端子機能:144/145(目標値一致信号)
4)PID制御のゲインを調整します。
詳細は第 5 章を参照してください。
①基本調整、および安定性や応答性を高める調整をします。
内 容 タイトル 機 能
PID制御ゲイン調整 f362 比例ゲイン f363 積分ゲイン f366 微分)ゲイン 制御を安定させる (フィ
ードバック値フィルタ)
f361 遅れフィルタ
応答性を高める
f372 目標値増レート(速度型 PID 制御用)
f373 目標値減レート(速度型 PID 制御用)
②システムで必要がある場合に調整します。
内 容 タイトル 機 能
安定してからPID制御を
開始する
f359 PID制御開始待ち時間

E6581878①
7
3. PID制御関連のパラメータ タイトル 機 能 調整範囲 標準出荷 fmod 周波数設定モード選択1 0:設定ダイヤル1(電源オフでも記憶)
1:VIA端子
2:VIB端子
3:設定ダイヤル2(中央部を押して記憶)
4:RS485通信
5:外部接点アップダウン
6:CANopen通信
7:通信オプション
8:VIC端子
9,10:-
11:パルス列入力
12, 13:-
14: sr0
0
acc 加速時間1 0.0~3600(s) 10.0
dec 減速時間1 0.0~3600(s) 10.0
fh 最高周波数 30.0~500.0(Hz) 80.0
ul 上限周波数 0.5~ fh(Hz) 60.0*1
ll 下限周波数 0.0~ ul(Hz) 0.0 sr0
~sr7 多段速運転周波数 0~7 ll~ ul(Hz) 0.0
fpid PID制御目標値 f368~f367 0.0
f167 目標値一致検出幅 0.0~ fh(Hz) 2.5
f201 VIA入力ポイント1の設定 0~100(%) 0
f202 VIA入力ポイント1の周波数 0.0~500.0(Hz) 0.0
f203 VIA入力ポイント2の設定 0~100(%) 100
f204 VIA入力ポイント2の周波数 0.0~500.0(Hz) 60.0*1
f207 周波数設定モード選択2 fmodと同一(0~14) 1
f210 VIB入力ポイント1の設定 -100~+100(%) 0
f211 VIB入力ポイント1の周波数 0.0~500.0(Hz) 0.0
f212 VIB入力ポイント2の設定 -100~+100(%) 100
f213 VIB入力ポイント2の周波数 0.0~500.0(Hz) 60.0*1
f216 VIC入力ポイント1の設定 0~100(%) 20
f217 VIC入力ポイント1の周波数 0.0~500.0(Hz) 0.0
f218 VIC入力ポイント2の設定 0~100(%) 100
f219 VIC入力ポイント2の周波数 0.0~500.0(Hz) 60.0*1
f240 始動周波数 0.1~ 10.0(Hz) 0.5
f241 運転開始周波数 0.0~ fh(Hz) 0.0
f270 ジャンプ周波数 1 0.0~ fh(Hz) 0.0
f271 ジャンプ幅 1 0.0~30.0(Hz) 0.0
f272 ジャンプ周波数 2 0.0~ fh(Hz) 0.0
f273 ジャンプ幅 2 0.0~30.0(Hz) 0.0
f274 ジャンプ周波数 3 0.0~ fh(Hz) 0.0
f275 ジャンプ幅 3 0.0~30.0(Hz) 0.0
f359 PID制御開始待ち時間 0~2400(s) 0 f360 PID制御 0:なし
1:プロセス型PID制御動作
2:速度型PID制御動作
0
f361 遅れフィルタ 0.0~25.0(s) 0.1

E6581878①
8
f362 比例ゲイン 0.01~100.00 0.30
f363 積分ゲイン 0.01~100.00(s-1) 0.20
f366 微分ゲイン 0.00~2.55(s) 0.00
f367 目標値の上限リミット 0.0~fh(Hz) 60.0*1
f368 目標値の下限リミット 0.0~φ367(Hz) 0.0
f369 PID制御フィードバック
信号選択
0:なし
1:VIA 端子
2:VIB端子
3:VIC端子
4~6: -
0
f372 目標値増レート
(速度型PID制御用)
0.1~600.0(s) 10.0
f373 目標値減レート
(速度型PID制御用)
0.1~600.0(s) 10.0
f380 PID正逆特性選択 0:正特性
1:逆特性
0
f389 PID制御目標値
信号選択
0:fmod/f207選択 1:VIA端子 2:VIB端子 3:fpid 4:RS485通信 5:外部接点アップダウン 6:CANopen通信 7:通信オプション 8:VIC端子 9、10:- 11:パルス列入力
3
f660 オーバライド加算入力選択 0:無効 1:VIA端子 2:VIB端子 3:VIC端子 4:fc
0
f661 オーバライド乗算入力選択 0:無効 1:VIA端子 2:VIB端子 3:VIC端子 4:f729
0
f702 フリー単位表示倍率 0.00:フリー単位表示なし(周波数表示) 0.01~200.0
0.00
f703 フリー単位変換対象選択 0:全周波数表示 1:PID関連周波数表示
0
f729 パネルオーバーライド乗算
ゲイン
-100~+100(%) 0
*1: セットアップメニューの設定によります。出荷時は「jp」が選択された状態に設定されてい
ます。
[入力・出力端子機能]
正論理 負論理 機 能
入力端子
36 37 PID制御禁止
52 53 PID積分・微分クリア
54 55 PIDの特性切換え
出力端子 144 145 目標値一致信号
[FM/パルス列出力・モニタ出力機能]
FM/パルス列出力 モニタ出力 機 能
選択番号 通信番号 選択番号 通信番号
2 FD02 2 FE02 周波数指令値(目標値)
23 FD22 23 FE22 PIDフィードバック値

E6581878①
9
本PID制御は、目標値とフィードバック値を、周波数に変換して制御を行います。
このため、目標値とフィードバック値を周波数に変換する必要がありますが、周波数フリー単位表
示倍率(f702)と周波数フリー単位変換対象選択(f703)を使用すると、周波数表示を実際
の温度や圧力に置換えることができます。
表示する値=モニタ表示またはパラメータの周波数×f702
f703=0の場合:
周波数関連のパラメータとモニタ表示が、f702の設定値をかけた値で表示されます。
注)PID制御から周波数指令運転に切換えても、本設定は自動的に変更されません。
出力周波数表示などは、f702の設定値をかけた値となりますのでご注意願います。
f703=1の場合:
次のパラメータとモニタの周波数が、f702の設定値をかけた値で表示されます。
[パラメータ]
タイトル 機 能
fpid PID制御目標値
f367 目標値の上限リミット
f368 目標値の下限リミット
[FM/パルス列出力・モニタ出力機能]
FM/パルス列出力 モニタ出力
機 能 選択番号 通信番号 選択番号 通信番号
2 FD02 2 FE02 周波数指令値(目標値)
23 FD22 23 FE22 PIDフィ-ドバック値

E6581878①
10
4. PID制御の設定
まず、PID制御に必要な、目標値、フィードバック値などを設定します。:4.1 項
その他は、モータやシステムに合わせて、必要な内容のみ設定してください。 :4.2 項、4.3 項
注)目標値、フィードバック値の設定は、圧力などの情報を周波数に換算して設定します。
設定上の周波数と実際の出力周波数は異なります。
4.1.基本設定
目標値、フィードバック値は必ず設定が必要です。
プロセス型PID制御は、応答性を高めるために加減速時間の設定も必要です。
4.1.1.フィードバック値の設定
検出器からの情報をフィードバック信号として入力します。
1.フィードバック信号の入力先を、PID制御フィードバック信号選択(f369)で選択
します。
入力先 PIDフィードバック制御信号選択(f369)
なし 0
VIA端子 1
VIB端子 2
VIC端子 3
2.フィードバック値の入力レベルを周波数に変換して設定します。
1)アナログ入力の場合
各アナログ入力特性を設定するパラメータは、第 6 章を参照してください。
<フィードバック値の設定例>
条件:圧力をPID制御し、1~2 気圧のフィードバック値を4~20mAでVIC端子
に入力する
20mA
f218
100%
f219 (60Hz)
f217
(0Hz)
4mA
f216
20%
20mA
2気圧
1気圧
4mA
フィードバック値 パラメータ設定
(周波数換算)

E6581878①
11
逆特性の設定も可能です。
①逆特性を設定する場合
②入力端子の信号で逆特性に切換える場合
例)S3端子でPID正逆切換(正論理)を行う場合
タイトル 機 能 設定例
f116 入力端子選択6(S3) 54:PIDの特性切換え(正論理)
f216 VIC入力ポイント 1 の設定 20(%)
f217 VIC入力ポイント 1 の周波数 0(Hz)
f218 VIC入力ポイント 2 の設定 100(%)
f219 VIC入力ポイント2の周波数 60(Hz)
f380のPID正逆特性選択でも同じ特性が得られます。(4.3.2 参照)
パラメータf380と端子入力で同時に逆特性を選択した場合正特性となります。
f217 (60Hz)
f219 (0Hz)
4mA
f216
20mA
f218
パラメータ設定
(周波数換算)
S3-CC 間 ON
S3-CC 間 OFF
20mA
f218
100%
f219 (60Hz)
f217
(0Hz)
4mA
f216
20%
パラメータ設定
(周波数換算)
*端子でPID正逆特性を切換えると、
フィードバック値だけでなく、目標
値の特性も正逆切換わります。

E6581878①
12
4.1.2.目標値の設定
フィードバック値に対して、目標となる値を目標値として設定します。
1.目標値の入力先を、PID制御目標値信号選択(f389)で設定します。
入力先 PID制御目標値信号選択(f389)
fmod/f207 選択 0
VIA端子 1
VIB端子 2
fpid 3
RS485通信 4
外部接点アップダウン 5
CANopen通信 6
通信オプション 7
VIC端子 8
パルス列入力 11
オーバライド機能で、加算・乗算することができます。
2.目標値の入力レベルを周波数に変換して設定します。
1) fpidで設定する場合
<目標値の設定例>
条件:圧力を PID 制御し、1~2気圧のフィードバック値を4~20mA で VIC 端子に
入力する。
目標値は、fpidで設定する。
パラメータ設定例
<注意>
目標値は、フィードバック値の上限よりも低くなるように入力してください。
目標値の入力が、フィードバック値の上限と同じ場合、フィードバック値が上限に達する
と偏差がゼロとなります。実際の出力が高くなってもフィードバック値はそれ以上になら
ないため、出力周波数が固定されてしまいます。
f367:目標値の上限リミットを設定することで、目標値の入力に上限リミットをかけ
ることもできます。
20mA
100%
60Hz
0Hz
4mA
20% 20mA
2気圧
1気圧
4mA
フィードバック値 フィードバック値
(周波数換算値)
fpid:30Hz(1.5 気圧) 1.5気圧
目標値
(周波数換算値)

E6581878①
13
タイトル 機能 設定例
fpid PID制御目標値 30 (Hz)
f216 VIC 入力ポイント 1 の設定 20 (%)
f217 VIC 入力ポイント1の周波数 0 (Hz)
f218 VIC 入力ポイント2の設定 100 (%)
f219 VIC 入力ポイント2の周波数 60 (Hz)
f389 PID制御目標値信号選択 3:fpid
注1)fpidの設定値は、設定ダイヤルで設定・変更できます。変更した値は、fpidに記憶さ
れます。
注2)目標値の設定は、フィードバック値の上限よりも低くしてください。
2)アナログ入力の場合
各アナログ入力特性を設定するパラメータは、第 6 章を参照してください。
<目標値の設定例>
条件:圧力を PID 制御し、1~2気圧のフィードバック値を4~20mA で VIC 端子に入力する。
目標値は、0~10V で VIB 端子に入力する。
①システム例
フィードバック信号 4~20mA
目標値の設定 0~10Vdc
M
P
1~2 気圧
電源
VIB
CC
VIC
R/L1
S/L2
T/L3
U/T1
V/T2
W/T3 圧力センサ
インバータ
ポンプ

E6581878①
14
②パラメータ設定例
圧力のフィードバック値と目標値を、周波数に換算して、レベルを合わせます。
実際の運転周波数は、この周波数換算値とは関係なく、PID制御の結果により出力される周波数
となります。
<注意>
目標値は、フィードバック値の上限よりも低くなるように入力してください。
例えば、上記で、目標値の入力が、2気圧=10V(60Hz)の場合、フィードバック値が
2気圧=20mA(60Hz)に達して偏差がゼロとなります。実際の出力が高くなってもフィー
ドバック値が20mA(60Hz)以上にならないため、出力周波数が固定されてしまいます。
3)多段速設定する場合
<目標値の設定例>
条件:圧力をPID制御し、1~2 気圧のフィードバック値を4~20mAでVIC 端子
に入力する。
目標値は、多段速設定(1、2,3段速)で、S1、S2端子に接点入力する。
圧力
(気圧)
フィードバック値
(4~20mA)
目標値
(0~10V)
周波数換算値
(Hz)
1 4 0 0
1.25 8 2.5 15
1.5 12 5.0 30
1.75 16 7.5 45
2 20 10 60
タイトル 機 能 設定例
f107 アナログ入力端子選択(VIB) 0:0 - +10V
f210 VIB入力ポイント 1 の設定 0(%)
f211 VIB入力ポイント 1 の周波数 0(Hz)
f212 VIB入力ポイント 2 の設定 100(%)
f213 VIB入力ポイント2の周波数 60(Hz)
f216 VIC入力ポイント 1 の設定 20(%)
f217 VIC入力ポイント1の周波数 0(Hz)
f218 VIC入力ポイント 2 の設定 100(%)
f219 VIC入力ポイント2の周波数 60(Hz)
f389 PID制御目標値信号選択 2: VIB端子
2気圧
1.5気圧
1気圧 4mA 20mA
60Hz
0Hz 4mA 20mA
フィードバック値 フィードバック値
(周波数換算値) 2気圧
1.5気圧
1気圧 0V 10V 0V
60Hz
0Hz 10V
目標値 目標値
(周波数換算値)

E6581878①
15
パラメータ設定例
注)目標値の設定は、フィードバック値の上限よりも低くしてください。
2気圧
1.5気圧
1気圧 4mA 20mA
60Hz
0Hz 4mA 20mA
フィードバック値 フィードバック値
(周波数換算値)
目標値
(周波数換算値)
3段速:45Hz(7.5気圧)
2段速:30Hz(1.5気圧)
1段速:15Hz(1.25気圧)
圧力
(気圧)
フィードバック値
(4~20mA)
目標値 周波数換算値
(Hz) 1~3段速 S1 端子 S2 端子
1 4 - - - 0
1.25 8 1 段速 ON OFF 15
1.5 12 2 段速 OFF ON 30
1.75 16 3段速 ON ON 45
2 20 - - - 60
タイトル 機 能 設定例
sr1 多段速運転周波数1 15(Hz)
sr2 多段速運転周波数2 30(Hz)
sr3 多段速運転周波数3 45(Hz)
f114 入力端子選択4A(S1) 10:多段速指令 1
f115 入力端子選択5 (S2) 12:多段速指令 2
f216 VIC入力ポイント 1 の設定 20(%)
f217 VIC入力ポイント1の周波数 0(Hz)
f218 VIC入力ポイント 2 の設定 100(%)
f219 VIC入力ポイント2の周波数 60(Hz)

E6581878①
16
4.1.3.オーバライド機能
速度型PID制御
目標値の設定を微調整するために、オーバライド機能(f660、f661)で、加算・乗算でき
ます。
パネルで、オーバライド乗算ゲインを設定することもできます。(f729)
設定の詳細はVF-S15 取扱説明書をご参照ください。
*プロセス型PID制御においても本機能は有効ですが、実際にはほとんど使用しません。
4.1.4.加減速時間
プロセス型PID制御
応答性を良くするために、加減速時間(acc/dec)を短く設定してください。
ただし、短くしすぎるとトリップしますのでご注意願います。
速度型PID制御
加減速時間は、加減速時間(acc/dec)の設定に関わらず、自動的に最短設定となります。
*トリップする場合は、各ゲインを調整してください。加減速時間を延ばす必要があると思われ
る場合は、プロセス型PID制御を使用してください。

E6581878①
17
4.2.モータに合わせて設定
使用するモータや機械に合わせて、必要なパラメータのみ設定してください。
PID制御の結果、実際に出力される周波数に対して有効です。
タイトル 機 能 内 容
fh 最高周波数 ・インバータが出力する周波数範囲の最大値を設定します。
・加減速時間(acc、dec)の基準になります。
加速時間は 0Hz からfhまでの時間、減速時間はfhから
0Hz までの時間を設定します。
ul 上限周波数 ・出力周波数の上限リミットです。
ll 下限周波数 ・出力周波数の下限リミットです。
f270~
f275
ジャンプ周波数
1~3
・機械系の固有振動数による共振を避ける(ジャンプする)場合
に設定します。
f240
始動周波数 ・始動時に設定周波数が瞬時に出力されます。
・始動トルクの応答遅れがある場合に使用します。
f241 運転開始周波数 ・設定周波数で運転停止をします。
注)運転開始周波数(f241)に大きな値を設定しますと、頻繁に運転・停止をする可能性があ
りますので、ご注意ください。
4.3.システムに合わせて設定
4.3.1.システムで必要な場合に設定する
システム上、必要がある場合に設定してください。
標準出荷設定のままでも特に問題はありません。
タイトル 機 能 内 容
f367 目標値の上限リミット ・目標値の上限リミットです。
・目標値の入力が、フィードバック信号の上限以上に
なると、出力周波数が固定されます。
(詳細は4.1.2項を参照してください)
目標値の入力レベルで調整することが難しい場合
は、本パラメータにて目標値の上限リミットを設定
してください。
f368 目標値の下限リミット 目標値の下限リミットです。
4.3.2.PIDの正逆特性を切換える
主にプロセス型PID制御で使用します。
温度制御の冷/暖切換えなど、PID制御の正逆特性を切換えできます。
タイトル 機 能 内 容
f380
PID正逆特性選択 PID制御出力の正逆特性を選択します。
入力端子の信号で、目標値とフィードバック値の特性を切
換えできます。
[入力端子機能]
正論理 負論理 機 能 動作入力仕様(正論理の場合)
54 55 PIDの特性切換 PID制御の正逆特性を切換えます。

E6581878①
18
4.3.3.目標値とフィードバック値一致信号出力
フィードバック値が目標値に一致(到達)した場合に、信号を出力することができます。
f389で指定される目標値と、f369で指定されるフィードバック値が±f167以内になると、
信号を出力します。
タイトル 機 能 内 容
f167 目標値一致検出幅 PID目標値一致の検出幅を設定します。
0.0~fh(Hz)
[出力端子機能]
正論理 負論理 機 能 動作出力仕様(正論理の場合)
144 145 目標値一致信号 f389で指定される目標値とf369が±f167以
内になるとON。
4.3.4.PID制御から周波数指令運転への切換え
入力端子に信号を入力し、PID制御をOFFにして、周波数指令による運転に切換えることが
できます。
・周波数設定モード選択 1(fmod)/2(f207)で指定される周波数で運転します。
・プロセス型PID制御の場合、加減速時間は、PID制御に合わせて短く設定していますので
ご注意ください。必要に応じて、第2加減速等を使用してください。
[入力端子機能]
正論理 負論理 機 能 動作入力仕様(正論理の場合)
36 37 PID制御禁止 PID制御をOFFにして、周波数指令による運転に切
換えます。

E6581878①
19
5. PID制御の調整パラメータ
5.1.調整概要
PID制御ゲインの目安がある場合
目安となる値を設定して運転し、動作確認してください。必要に応じて調整をします。
PID制御ゲインの目安がない場合
1)まず初期設定で運転し、動作確認してください。
2)基本調整をします。
①応答が遅い場合は、まず比例(P)ゲインを調整します。
②不安定な状態が続くようであれば、積分(I)ゲインを調整します。
③PIゲインの調整で安定しない場合や、常に変化が大きい場合は、微分(D)ゲインを調整
します。
3)必要に応じて、制御を安定させるための応用調整をします。
*速度型PID制御で不安定な場合は、遅れ一次フィルタを設定して安定させます。
5.2.基本調整(共通)
制御するシステムに合わせて調整する、PID制御の基本的な調整ゲインです。
記号 タイトル 機 能 設定値
Kp f362 比例ゲイン f362=1.0 で Kp =1.0
Ki f363 積分ゲイン f363=1.0 で Ki =1.0(s-1)
Kd f366 微分ゲイン
f366=1.0 で Kd =1.0(s)
PID制御
dtxdKddtxKixKpy ∆
+∆+∆= ∫ x∆ (Hz) y (Hz)
PID 出力周波数

E6581878①
20
5.2.1.比例(P)ゲイン
・比例(P)ゲイン(f362)は、PID制御の比例ゲインです。
偏差(目標値とフィードバック値の差)に乗ずる係数で、偏差に比例した補正量を得る制御をし
ます。この値を大きくすると応答性が速くなりますが、必要以上に大きな値を入れますとハンチ
ング等の不安定現象を起こすことがあります。
5.2.2.積分(I)ゲイン
・積分(I)ゲイン(f363)は、PID制御の積分ゲインです。
比例動作で残る偏差(残留偏差オフセット)を0にします。
この値を大きくすると残留偏差が少なくなりますが、必要以上に大きな値を入れますとハンチン
グの不安定現象を起こすことがあります。
5.2.3.微分(D)ゲイン
・微分(D)ゲイン(f366)は、PID制御の微分ゲインです。
偏差の急変に対応する応答をよくするための動作をします。
但し、この値を必要以上に大きくすると、出力周波数が大きくふらつく不安定現象をおこす
ことがあります。
f362大
応答速い
f362小
応答遅い
目標値設定値
出力周波数
時間
f363大
f363小
目標値設定値
出力周波数
残留偏差
時間
前回偏差
-今回偏差
微分ゲイン大
微分ゲイン小
出力周波数
時間
時間

E6581878①
21
5.3.応用調整(共通)
安定性を高める場合など、必要に応じて調整します。
5.3.1.PID制御の微分・積分リセット
入力端子に信号を入力して、PID制御の積分量、および微分量をリセットすることができます。
[入力端子機能]
正論理 負論理 機 能 動作入力仕様(正論理の場合)
52 53 PID積分・微分
クリア PID制御の積分量、および微分量をリセットします。
5.3.2.PID制御開始待ち時間
立ち上げ時に、制御系が安定するまでの間はPID制御をさせたくない場合などに、PID制御を
開始するまでの待ち時間を設定することができます
タイトル 機 能 内 容
f359 PID制御開始待ち時間 設定時間内は、フィードバック入力信号は無視し、周波
数設定モード選択 1(fmod)/2(f207)で指定される
周波数で運転します。
設定時間経過後に、PID制御モードに移行します。

E6581878①
22
5.4.応用調整(速度型PID制御のみ)
速度型PID制御において、必要に応じて調整します。
5.4.1.遅れフィルタ
遅れフィルタ(f361)は、偏差の急激な変化を和らげる動作(一次遅れ処理)をし、制御を安定
させます。
設定値を小さくすると処理が早くなり、大きくすると処理が遅くなります。通常あまり変更の必要
はありません。
記号 タイトル 機 能 設定値
τ f361 遅れフィルタ f361=1.0 でτ=1.0(s)
5.4.2.目標値増レート・減レート
目標値増レート・減レート(f372/f373)は、速度型PID制御時のフィードバック値の応答
性を決定します。応答性をよくするために、短く設定してください。
タイトル 機 能 設定値
f372 目標値増レート
(速度型PID制御用)
f372=1.0 で指令値を 1.0 秒で 0Hz から fh
(最高周波数)まで指令値増加
f373 目標値減レート
(速度型PID制御用)
f373=1.0 で指令値を 1.0 秒で fh(最高周波
数)から0Hz まで指令値減少
遅れフィルタ
τt
e−
−1
増減レート
入力
出力

E6581878①
23
6. アナログ入力特性
フィードバック値や目標値を、アナログ入力で設定する場合は、各端子の入力特性を設定して
ください。
*下記は、0~60Hzの設定例です。
10V
f212
100%
f213 (60Hz)
f211
(0Hz)
0V
f210
0%
VIB端子
(0~10V 入力)
10V
f203
100%
f204 (60Hz)
f202
(0Hz)
0V
f201
0%
VIA端子
(0~10V 入力)
10V
f212
100%
f213 (60Hz)
f211
(0Hz)
0V
f210
0%
VIB端子
(-10~10V 入力)
-10V
-100%
逆転
正転
20mA
f218
100%
f219 (60Hz)
f217
(0Hz)
4mA
f216
20%
VIC 端子
(4~20mA入力)