Embed Size (px)
Citation preview
AUTONOMOUSMININGModular. Scalable. OEM Agnostic.
03
SCALABLE AUTONOMY
ASI systems are designed for modular, yet scalable deployment. ASI recognizes the daunting task of automating all aspects of a surface or underground mines in one step. Yet, a piecemeal approach often introduces risk of deploying independent systems which are unable to integrate later into an overall mine system. ASI leverages its Mobius mine software to allow highly flexible, modular implementations of individual autonomy solutions, all using a common control platform. With Mobius installed as a foundation, mines can implement individual projects that can then scale into larger integrated solutions with the aim of ultimately realizing a fully autonomous, yet integrated mining operation.
Scalable Solutions For Mining
Connecting All The Dots In The Mine Of Tomorrow
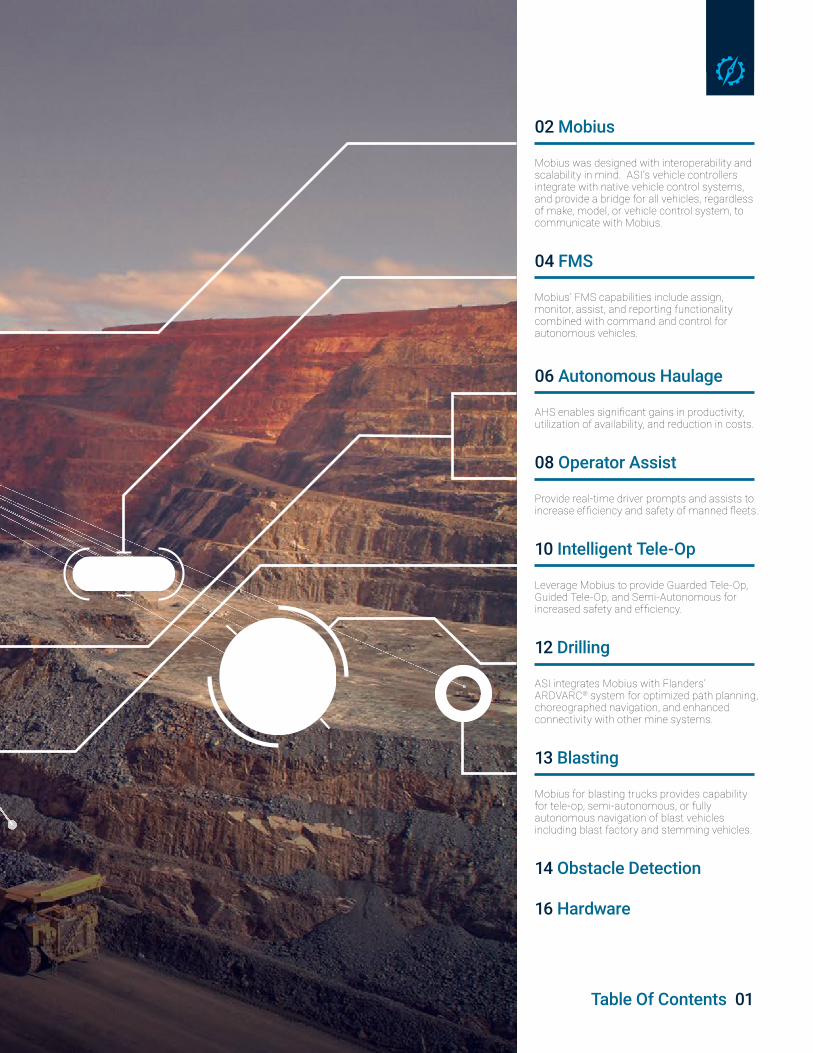
Table Of Contents 01
Mobius was designed with interoperability and scalability in mind. ASI’s vehicle controllers integrate with native vehicle control systems, and provide a bridge for all vehicles, regardless of make, model, or vehicle control system, to communicate with Mobius.
02 Mobius
Mobius’ FMS capabilities include assign, monitor, assist, and reporting functionality combined with command and control for autonomous vehicles.
04 FMS
AHS enables significant gains in productivity, utilization of availability, and reduction in costs.
06 Autonomous Haulage
Provide real-time driver prompts and assists to increase efficiency and safety of manned fleets.
08 Operator Assist
Leverage Mobius to provide Guarded Tele-Op, Guided Tele-Op, and Semi-Autonomous for increased safety and efficiency.
10 Intelligent Tele-Op
14 Obstacle Detection
ASI integrates Mobius with Flanders’ ARDVARC® system for optimized path planning, choreographed navigation, and enhanced connectivity with other mine systems.
12 Drilling
Mobius for blasting trucks provides capability for tele-op, semi-autonomous, or fully autonomous navigation of blast vehicles including blast factory and stemming vehicles.
13 Blasting
16 Hardware
02
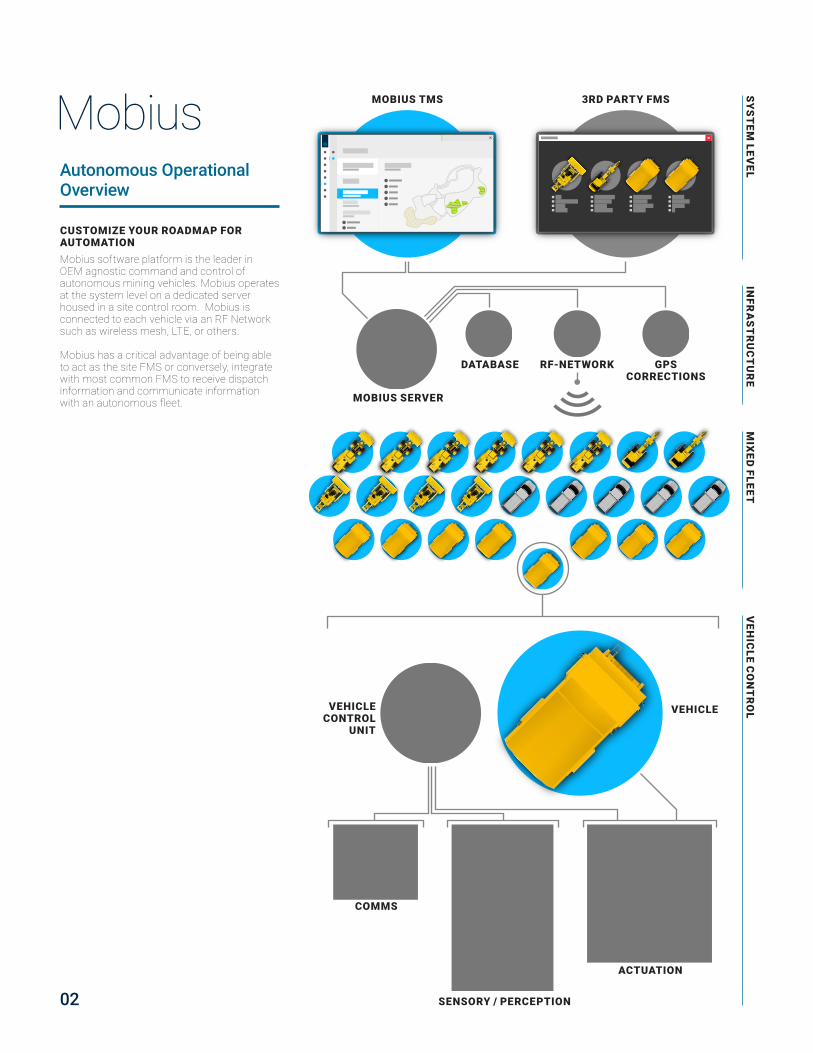
Mobius
CUSTOMIZE YOUR ROADMAP FOR AUTOMATIONMobius software platform is the leader in OEM agnostic command and control of autonomous mining vehicles. Mobius operates at the system level on a dedicated server housed in a site control room. Mobius is connected to each vehicle via an RF Network such as wireless mesh, LTE, or others.
Mobius has a critical advantage of being able to act as the site FMS or conversely, integrate with most common FMS to receive dispatch information and communicate information with an autonomous fleet.
Autonomous Operational Overview
Radio
GPS
Drive-By-Wire
Hydraulic
Mechanical
CAN BUS, VIMS
Cameras
IMU
Lidar
Radar
Proximity Monitor
MOBIUS TMS
MOBIUS SERVER
VEHICLE CONTROL
UNIT
VEHICLE
COMMS
ACTUATION
SENSORY / PERCEPTION
DATABASE RF-NETWORK GPS CORRECTIONS
3RD PARTY FMS
SY
ST
EM LEV
ELIN
FRA
ST
RU
CT
UR
EM
IXED
FLEETV
EHIC
LE CO
NT
RO
L
Mobius 03
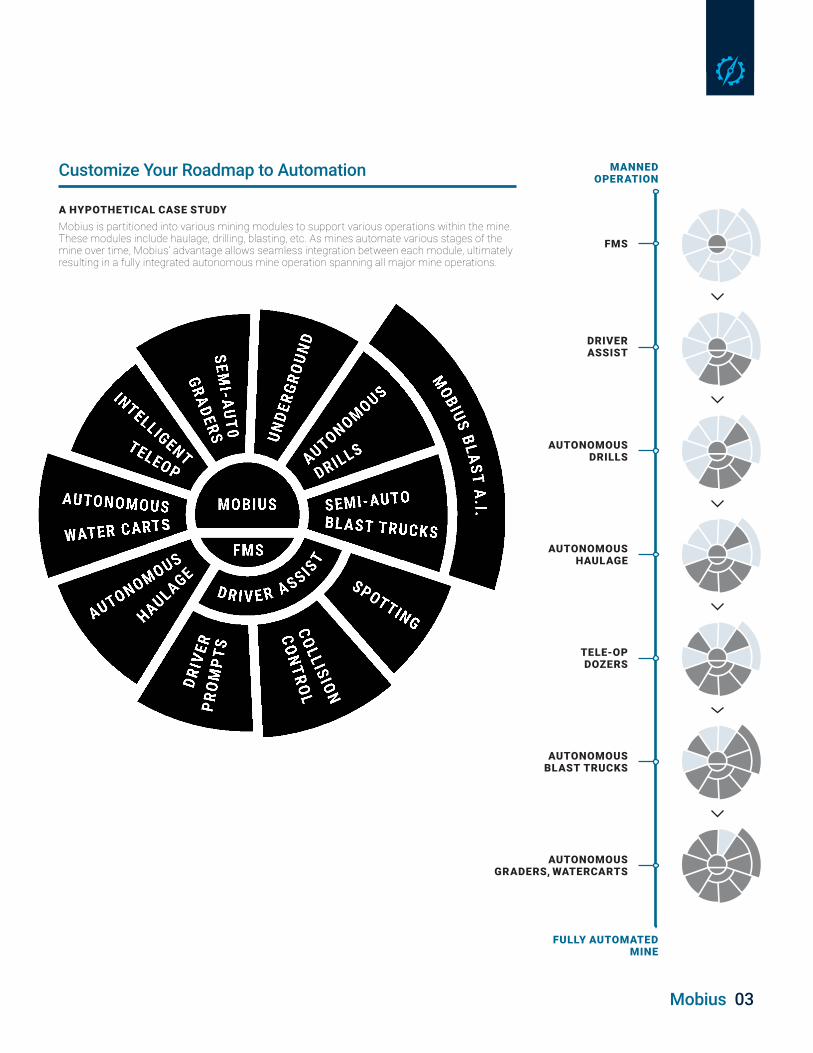
A HYPOTHETICAL CASE STUDYMobius is partitioned into various mining modules to support various operations within the mine. These modules include haulage, drilling, blasting, etc. As mines automate various stages of the mine over time, Mobius’ advantage allows seamless integration between each module, ultimately resulting in a fully integrated autonomous mine operation spanning all major mine operations.
Customize Your Roadmap to Automation
FMS
MANNED OPERATION
DRIVER ASSIST
AUTONOMOUS HAULAGE
AUTONOMOUS DRILLS
AUTONOMOUS BLAST TRUCKS
AUTONOMOUS GRADERS, WATERCARTS
TELE-OP DOZERS
FULLY AUTOMATED MINE

04
FMSFLEET MANAGEMENT SYSTEM WITH THE POWER OF COMMAND AND CONTROLASI’s Mobius system includes the basic functions embodied in a more expensive and comprehensive FMS. Mine operators with manned fleets should consider using Mobius’ FMS, in lieu of more comprehensive systems. The primary functions of Mobius:
Birds-eye view of position and projected path of all vehicles checked into system
Graphic mine map with ability to drill down to any area of the mine or click on any vehicle
Production monitoring of haulage including cycle times, tonnage, idle time, hang time, etc.
Payload analytics for performance metrics comparing nominal vs actual tonnage
Real-time status tracking of trucks through load cycle, eg. Load, dump, loaded, empty, etc.
Vehicle underutilization alerts when vehicle idling in stationary position above threshold
Monitor
Suite of standard reports plus access to data via open database for unlimited queries
KPI Dashboard available on key metrics for instant access to plan vs actual data
Driver performance reporting shows performance by driver against benchmark data
Road condition reporting including slippage, roughness, etc.
Radio Network reporting of coverage, throughput, and outages.
Anomaly reporting of vehicle health and system irregularities
Report
The only combined FMS/Command and Control for autonomous vehicles
Manual or Automatic Truck Assignments. Import mine plans or assign via Point and Click.
Real time exception alerts allowing for on the fly modifications to routes and vehicle assignments.
Operator discretionary task empowerment for on-vehicle decision making when appropriate.
Pitboss override and information access provides mine foreman access / control of assignments.
Directed text messaging between control room operator and individual vehicles.
Patented adaptive route learning optimization
Assign
Collision and Proximity warnings
Precision Spotting Assistant guides operators for single or dual sided loading to shovel through audio and visual queues
Choreographer – prompts drivers for nominal speeds, routes, slow-down, speed-up, etc.
Fatigue Guardian – warns driver when noticeable trend or deviation from norms
Best Driver Delta – Scores driver performance in real-time for training / improvement
Assist
FMS 05
Includes more driver assist functionality over other fleet management solutions
06
Autonomous HaulageOEM Agnostic Retrofit Automation KitsAutomate new or existing fleet assets of any make or model without locking your operation into a single source for vehicles.

Autonomous Haulage 07
Machine control on vehicles squeezes productivity gains from various sources including more efficient spotting, driving behaviors, and real-time information flows.
Increased Productivity
Eliminating the need to stop equipment for breaks and shift changes, which increases the utilization of each vehicle.
Increased Equipment Utilization
Increase safety by removing operators from harms way. Reduce damage by precision control and improved driving characteristics.
Improved Safety, Reduced Damage
By controlling multiple vehicles in a single control room, and managing vehicle operations in a consistent manner, mine operations can realize a significant reduction in labor, fuel and maintenance costs.
Reduced Cost Per Ton
Autonomous haulage allows for programmable operation of vehicles within OEM operating parameters. By better tracking and controlling vehicle operations within prescribed limits, asset life can be extended, including areas such as tires, brakes, and other components.
Better Asset Management
Regulations imposed for human operations restrict flexibility in mine design. By removing humans from the mine, operators have increased freedom to alter mine designs in areas such as road widths or wall heights which can greatly reduce overburden removal costs.
Mine Plan Optimization& Mine Design
08
Operator Assist
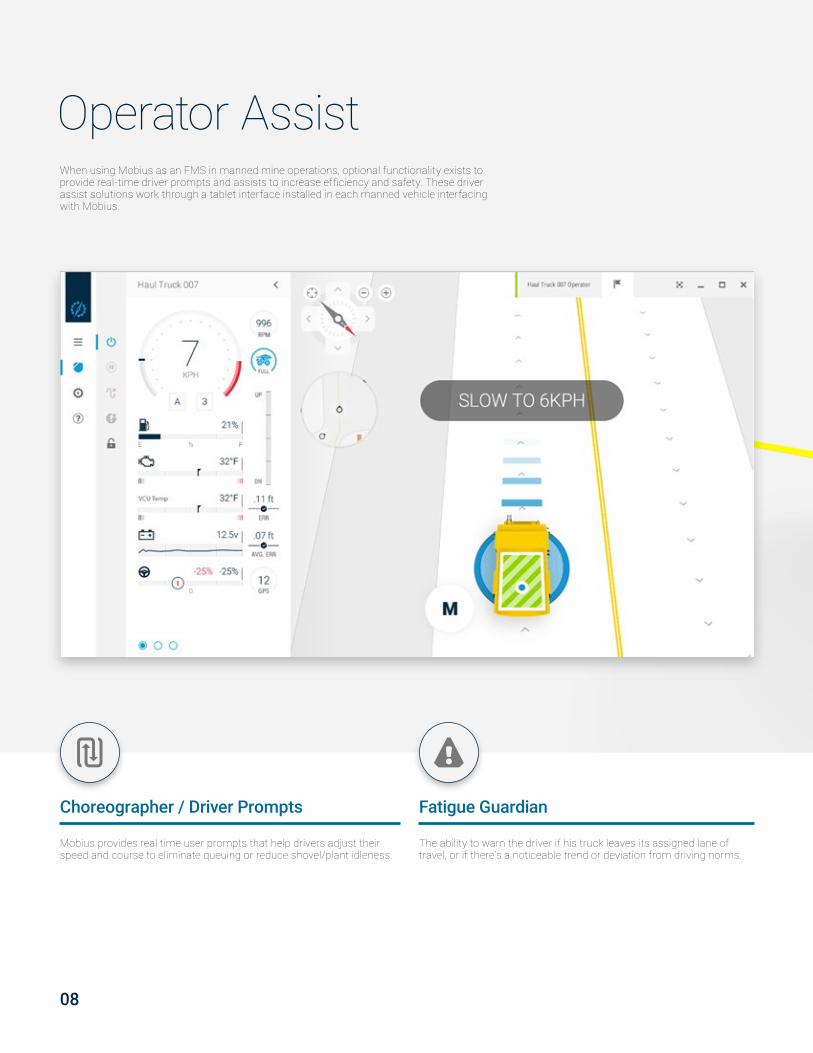
Mobius provides real time user prompts that help drivers adjust their speed and course to eliminate queuing or reduce shovel/plant idleness.
The ability to warn the driver if his truck leaves its assigned lane of travel, or if there’s a noticeable trend or deviation from driving norms.
When using Mobius as an FMS in manned mine operations, optional functionality exists to provide real-time driver prompts and assists to increase efficiency and safety. These driver assist solutions work through a tablet interface installed in each manned vehicle interfacing with Mobius.
Choreographer / Driver Prompts Fatigue Guardian
Operator Assist 09
Identify and warn operators of possible collisions and provide proximity alerts when vehicles are within a configurable threshold.
Guide operators for single or dual sided loading to shovel through audio and visual queues.
Real-time comparison of operators against best practices with immediate feedback to improve truck operation.
Collision Warnings Spot Assist The Trainer
10
Intelligent Tele-Op
EXCAVATORBLAST TRUCKDOZER FONT END LOADER UNDERGROUND LHD
ASI’s autonomy kits can be configured for a variety of mining equipment and applications from dozers to LHDs. Intelligent Tele-Op leverages the power of Mobius to increase the efficiency and safety of each mine application. From Slot dozing to underground mucking, Intelligent Tele-Op provides distinct advantages for any application.
Applications

Intelligent Tele-Op 11
Guided Tele-op leverages the capabilities of Mobius to enable automatic steering along a pre-set path. Under this mode, an operator may control acceleration and braking while Mobius automatically controls steering. Similar to a train on a railroad track, controlled vehicles can drive on their precise path, minimizing the reliance on high resolution video and operator skill for safe operation.
Guarded tele-op leverages the capabilities of Mobius to enable geo-fencing within tele-op control. This function enables user to create drivable areas within the map. By establishing drivable areas, tele-operated vehicles can be prevented from driving in unsafe areas or running off established roads. Anti-collision capability can be achieved as multiple vehicles are checked into the system.
ASI’s Autotramming functionality allows for semi-autonomous capability. Under this mode, a user generally uses tele-op control of the vehicle when doing earth moving or technical operations. An operator may then assign the vehicle a destination point on the map, then Mobius autonomously drives the vehicle to that point. This function is typically used to autonomously deploy vehicles from one location to another and then take tele-op control when doing technical work.
Guarded Tele-Op
Tele-Op Control Types
Guided Tele-Op Autotramming
WHEEL STICKS HANDHELD
12
Autonomous Drilling
Multiple drills may be operated and monitored from a Command Center remote from the bench. The holes are drilled in a pre-mapped order at the locations and depths loaded into the system. The drill is precisely guided to the proper hole coordinates for accurate hole location. Upon reaching the desired depth it retracts the drill string then jacks and propels to the next hole.
The choreography and path planning capability of Mobius allows for optimized movement of multiple drills and potentially blast trucks in a single drill bench. By coordinating vehicle movements, drill cycle time can be reduced while increasing vehicle utilization.
Drills are guided to hole coordinates within the drill bench using Mobius Path Planner. Mobius also allows for autonomous operation outside the drill bench. This enables autonomous navigation to other drill benches or safe zones during blasting operations.
High Precision Drilling Bench Optimization Autonomous Navigation
ASI integrates Flanders’ ARDVARC system with Mobius for optimized path planning, choreographed navigation, and enhanced connectivity with other mine systems.
Flanders ARDVARC

Drills & Blast Trucks 13
Autonomous Blasting
ASI’s Mobius for Blasting platform provides capability for tele-op, semi-autonomous, or fully autonomous navigation of blast vehicles including blast factory and stemming vehicles.
Potential integration of blasthole characteristic data such as seam and geology aspects of each hole allow dynamic blast charging and detonation timings during the blast cycle. By dynamically tailoring the blast process based on actual, “As-Drilled” hole data, blast processes can achieve higher efficiency and increased fragmentation. The resulting benefits ultimately include less impact on excavators, crushers, grinders, and even more efficient haulage.
Mobius is capable of working with various 3rd party payload providers to enable automated deployment of blast mediums and initiation systems.
Tele-Op / Semi-AutonomyCoordinated Drill & Blasting Payload APIs
14
Obstacle Detection & Avoidance
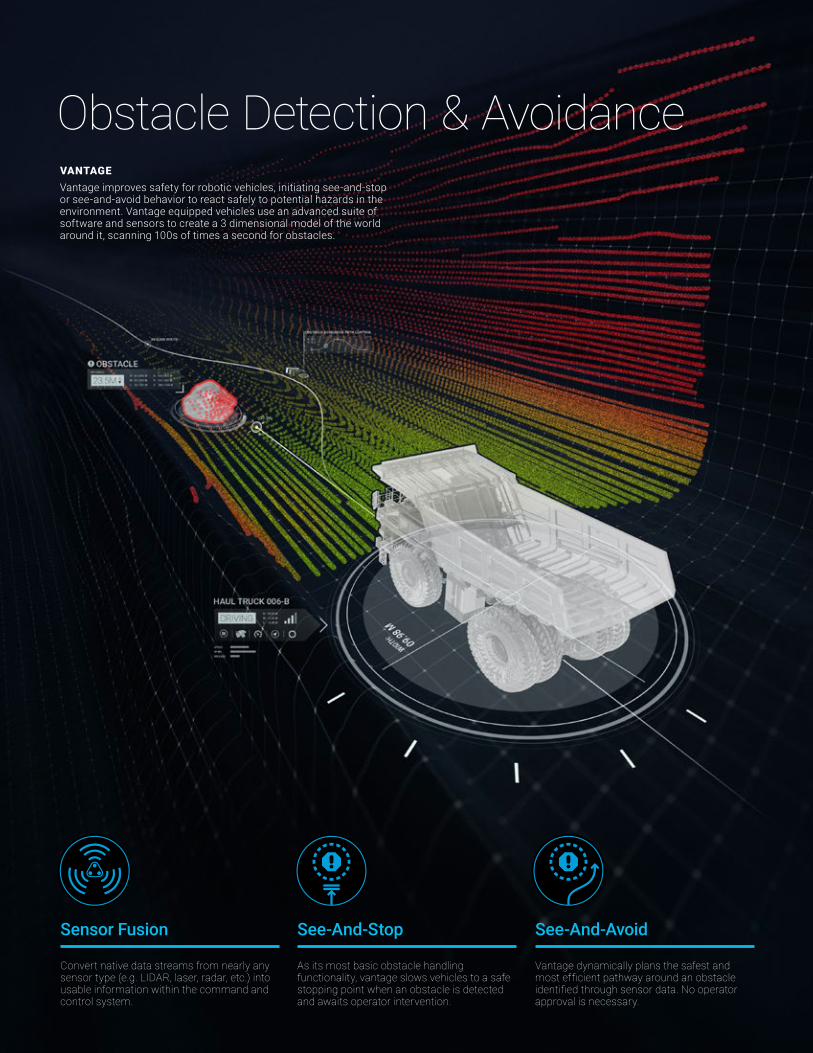
Convert native data streams from nearly any sensor type (e.g. LIDAR, laser, radar, etc.) into usable information within the command and control system.
As its most basic obstacle handling functionality, vantage slows vehicles to a safe stopping point when an obstacle is detected and awaits operator intervention.
Vantage dynamically plans the safest and most efficient pathway around an obstacle identified through sensor data. No operator approval is necessary.
Sensor Fusion See-And-Stop See-And-Avoid
VANTAGE Vantage improves safety for robotic vehicles, initiating see-and-stop or see-and-avoid behavior to react safely to potential hazards in the environment. Vantage equipped vehicles use an advanced suite of software and sensors to create a 3 dimensional model of the world around it, scanning 100s of times a second for obstacles.
Obstacle Detection 15
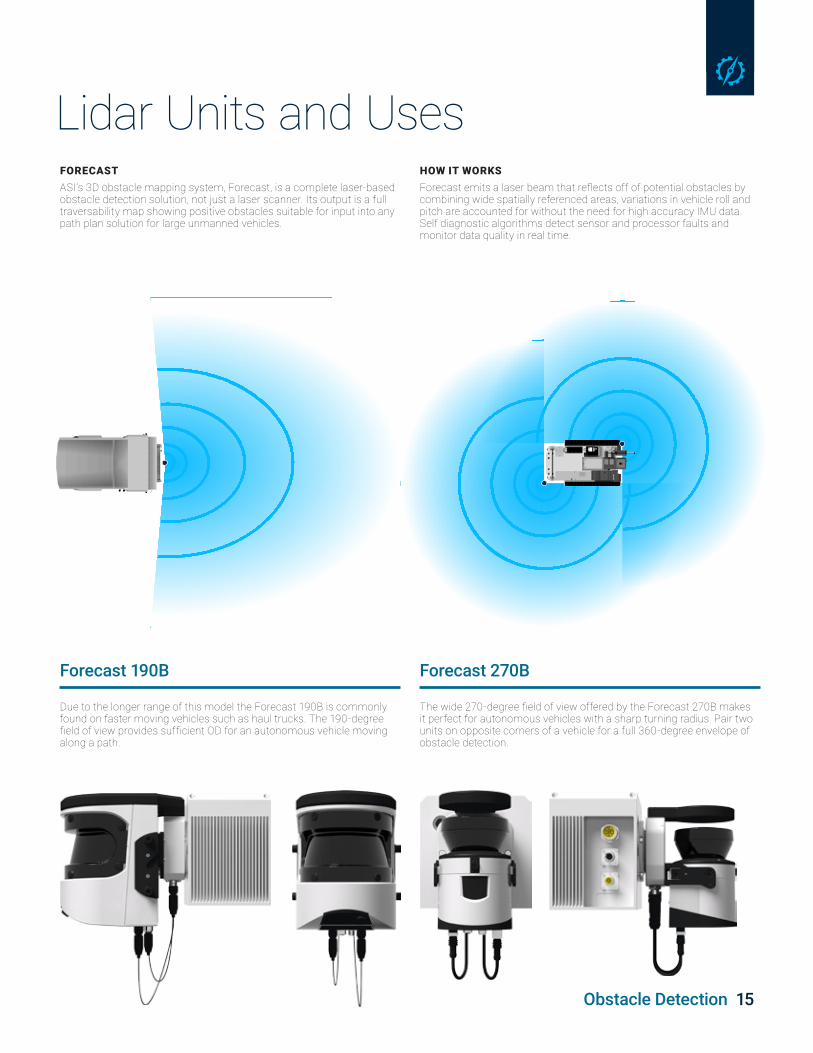
Lidar Units and Uses
Due to the longer range of this model the Forecast 190B is commonly found on faster moving vehicles such as haul trucks. The 190-degree field of view provides sufficient OD for an autonomous vehicle moving along a path.
FORECASTASI’s 3D obstacle mapping system, Forecast, is a complete laser-based obstacle detection solution, not just a laser scanner. Its output is a full traversability map showing positive obstacles suitable for input into any path plan solution for large unmanned vehicles.
HOW IT WORKSForecast emits a laser beam that reflects off of potential obstacles by combining wide spatially referenced areas, variations in vehicle roll and pitch are accounted for without the need for high accuracy IMU data. Self diagnostic algorithms detect sensor and processor faults and monitor data quality in real time.
The wide 270-degree field of view offered by the Forecast 270B makes it perfect for autonomous vehicles with a sharp turning radius. Pair two units on opposite corners of a vehicle for a full 360-degree envelope of obstacle detection.
Forecast 190B Forecast 270B

16
Hardware Kit
VEHICLE CONTROL UNIT
VEHICLE INTERFACE MODULE
NATIVE VEHICLE CONTROLS
RADAR
CAMERAS
GPSRADIO
LIDAR
Hardware 17
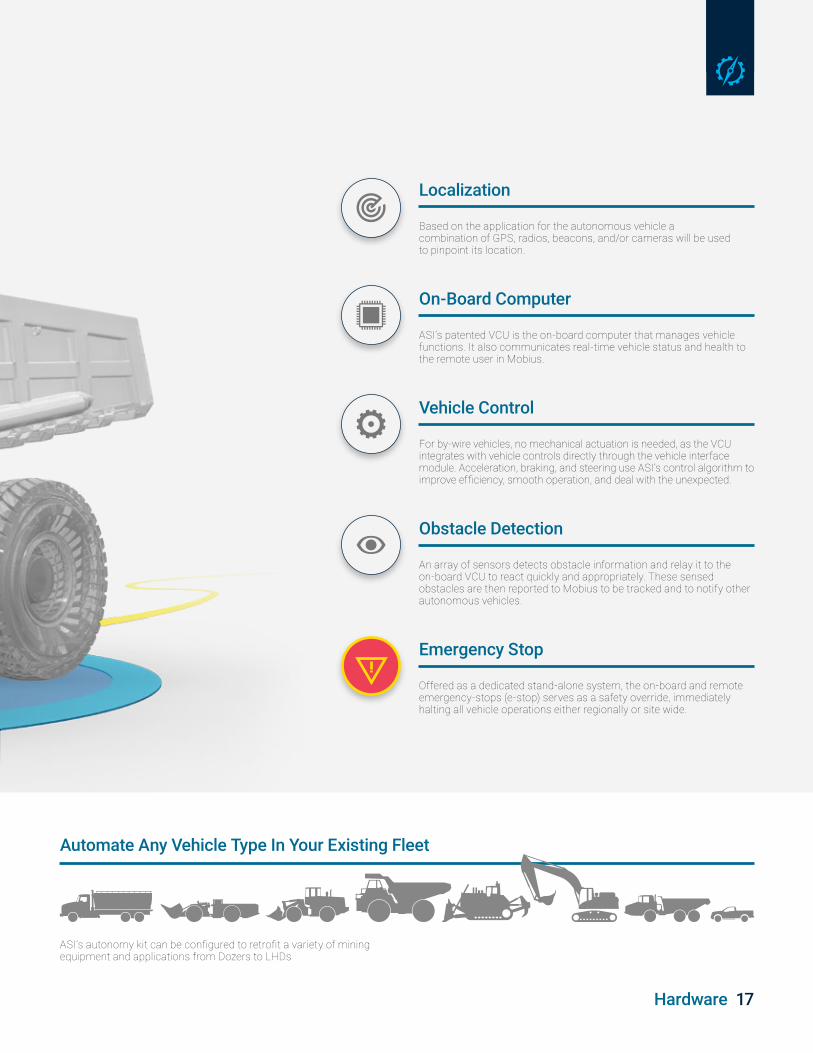
Automate Any Vehicle Type In Your Existing Fleet
ASI’s patented VCU is the on-board computer that manages vehicle functions. It also communicates real-time vehicle status and health to the remote user in Mobius.
On-Board Computer
Based on the application for the autonomous vehicle a combination of GPS, radios, beacons, and/or cameras will be used to pinpoint its location.
Localization
For by-wire vehicles, no mechanical actuation is needed, as the VCU integrates with vehicle controls directly through the vehicle interface module. Acceleration, braking, and steering use ASI’s control algorithm to improve efficiency, smooth operation, and deal with the unexpected.
Vehicle Control
An array of sensors detects obstacle information and relay it to the on-board VCU to react quickly and appropriately. These sensed obstacles are then reported to Mobius to be tracked and to notify other autonomous vehicles.
Obstacle Detection
Offered as a dedicated stand-alone system, the on-board and remote emergency-stops (e-stop) serves as a safety override, immediately halting all vehicle operations either regionally or site wide.
Emergency Stop
ASI’s autonomy kit can be configured to retrofit a variety of mining equipment and applications from Dozers to LHDs
+1.866.881.2171AUTONOMOUS SOLUTIONS, INC. 990 N 8000 W Mendon, UT, USA 84325
asirobots.com
Anglo American’s Automation Partner Our Partners / Clients Sales Staff
The goal of the multi-year relationship is to deliver enhanced productivity, sustainability, and safety through OEM agnostic mining vehicle automation systems for the company’s haulage operations.
Contact our sales staff for quotes or any additional information.
GENERAL INQUIRIES+1.866.881.2171 x3
DREW LARSENM +1.801.884.2662 T +1.435.755.2980 x1142 [email protected]
“[The mining industry] needs to leap forward 20 years in five”
Tony O’NeillANGLO AMERICAN
Ready to Innovate?