Embed Size (px)
Citation preview

No one can do
better than his best,
so doing best is only
option.
• •
Space Robotics
BY:Ankur
pathak
RD6004 b48
11009408
CONTENTS
1-Introduction2-Space Robots Importance3-what technology is needed?4-Examples of Space Robots 5-Fundamental research challenges6-International efforts in Space Robotics7-Future scope of Space Robotics

INTRODUCTION
Space Robotics is the development of machines for the space environment that perform Exploration, or to Assemble/Construct, Maintain, or Service other hardware in Space.
Humans generally control space robots locally (e.g. Space Shuttle robotic arm) or from a great distance (e.g. Mars Exploration Rovers)

Space Shuttle robotic arm
Mars Exploration Rovers

Space Robots Importance
Perform tasks less expensively, sooner, and with less risk or more delicate "touch" than with human astronautsGo where people can’t go (within reason), and for long durationsSpace is a hazardous environment & Access to space is expensiveRobots don't need to return to Earth (which can be very costly) NASA JPL,USA NASA JSC,USA WTEC Robotics
What technology is needed?Mobility: Need to plan paths that move quickly and accurately from A to B without collisions or putting robot or worksite elements at risk.
Manipulation: Need to contact worksite elements safely, quickly and accurately without imparting excessive forces beyond those needed for the task.
Time Delay: The speed-of-light delay between humans on Earth and the robot is seconds in the Earth-moon vicinity and ~30 minutes to Mars.
Extreme Environments: Radiation, temperature, very fine dust, etc.
Power, communications: difficult.

Example of Space Robots
Mars Exploration RoverTwo MER’s “spirit and opportunity” have explored opposite sides of Mars since Jan '04, traversing many kilometres each, taking over 80,000 images and 1.5 million spectra from multiple instruments.
Robot arm on Mars Exploration Rover
Example of Space Robots(conti....)RobonautRobonaut is an "astronaut-equivalent",highly dexterous robot under development that will use all the same tools, handholds, and other equipment that astronauts in space suits can use. It can be perform as an assistant in collaboration with suited astronauts.
Robonaut performing dexterous grasp
Fundamental Research Challenges
Mobility:
Finding accurate answers to the questions: Where am I ? Where is the current “goal” Point? Where are any obstacles or hazards, including hazards that may not be visible (e.g. Soft sand) How can I know where I am relative to everything else as I move?
Fundamental Research Challenges (Cont....)
Manipulation: How can I sense and impart forces that are sufficient but not excessive to accomplish the task? How can I move both quickly enough to assist human astronauts but not pose a risk to them?
Time Delay: How to place the space robot with sufficient sensing, perception, and reasoning to work safely and productively for a period at least as great as the speed of light round trip for human update?

SARCOS dexterous hand capable of force control
Artist's concept of a submarine robot in the sub-ice liquid water ocean
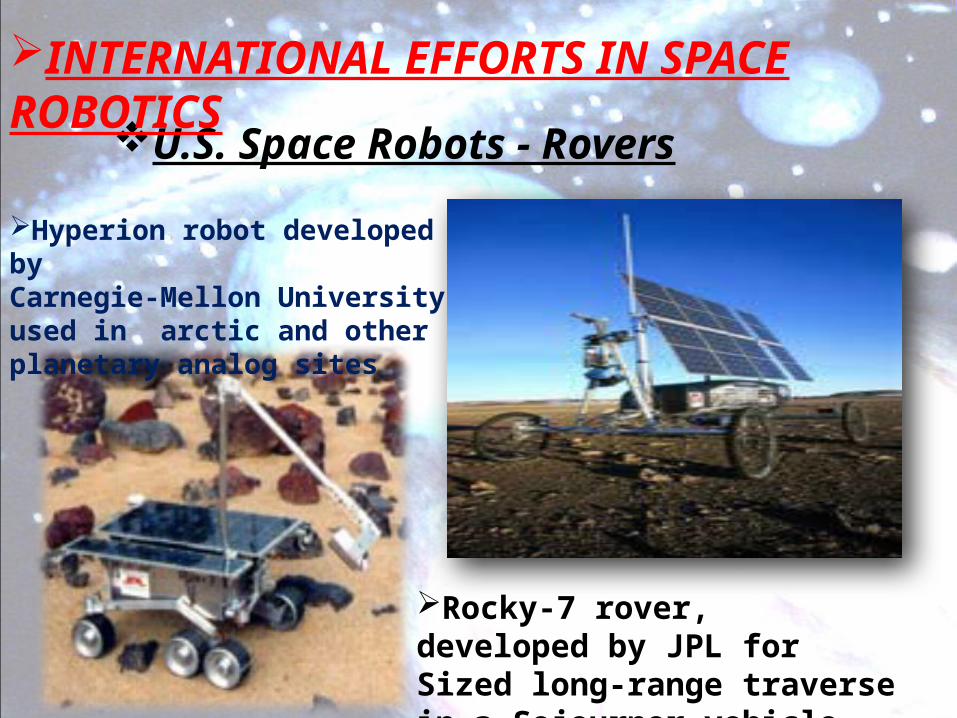
U.S. Space Robots - Rovers
Hyperion robot developed byCarnegie-Mellon University used in arctic and other planetary analog sites
Rocky-7 rover, developed by JPL for Sized long-range traverse in a Sojourner vehicle
INTERNATIONAL EFFORTS IN SPACE ROBOTICS

North America - Space Manipulators
Robonaut, developed by theJohnson Space Center, is used to study the use of anthropomorphic
Phoenix arm, developed by the JetPropulsion Laboratory for the Phoenixmission
Japan Space Robots
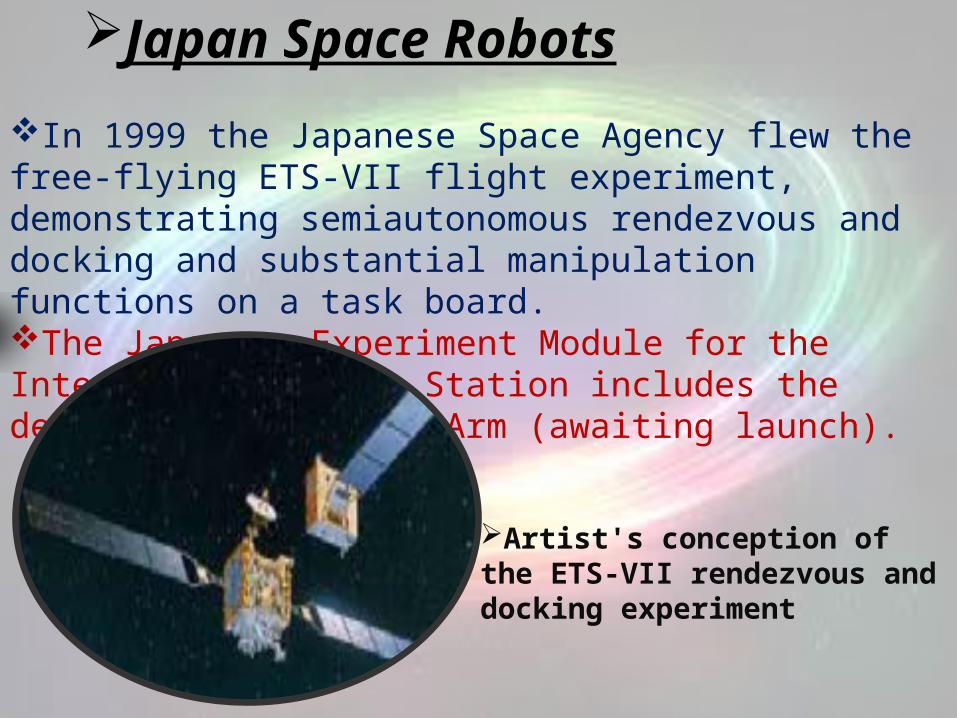
In 1999 the Japanese Space Agency flew the free-flying ETS-VII flight experiment, demonstrating semiautonomous rendezvous and docking and substantial manipulation functions on a task board.The Japanese Experiment Module for the International Space Station includes the dexterous Small Fine Arm (awaiting launch).
Artist's conception of the ETS-VII rendezvous and docking experiment

Europe - U.K. and FranceThe British developed the manipulator arm for the Beagle-2 Mars probe. CNES and LAAS in Toulouse have had a long program of research in planetary rover navigation and control, and have proposed a substantial role in a Mars Rover for the European Space Agency Exo Mars Project.
Beagle-2 Mars probe with robot arm

FUTURE SCOPE OF SPASE ROBOTICS
Future trends in Space Robotics are expected to lead to planetary rovers that can operate many days without commands, and can approach and analyze science targets from a substantial distance with only a single command.
robots that can assemble/construct, maintain, and service space hardware using very precise force control, dexterous hands, despite multi- second time delay.


For giving your attention.