Embed Size (px)
Citation preview

Improving Spatiotemporal Stability for Object Detection
and Classification
Albert Y. C. Chen, Ph.D. Computer Scientist @ Tandent Vision
2015/03/27

Videos, lots of them.
0
20
40
60
80
2007 2008 2009 2010 2011 2012
Hours of videos uploaded to Youtube every minute

Goal: automatically analyze, organize, and archive videos.
Typical Approaches:Classifiers, classifiers, classifiers
•Video nouns, e.g., sky, tree, building, car, etc.•Video noun structures, e.g., horizontal flat surfaces, vertical surfaces, non-support surfaces, etc.•Video verbs, e.g., diving, bench press, punch.

Results are far from perfect
for example, in
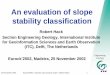
Joint Segmentation and Classification (multiple semantic class pixel labeling)

Example annotations Object segmentation Class segmentation
Difficult objects masked
Image
Example annotations Object segmentation Class segmentation Image

State-of-the-art results from Pascal VOC 2012
Segmentation Challenge

Example segmentations Image Ground truth
NUS_DET_SPR_GC_SP BONN_O2PCPMC_FGT_SEGM

Example segmentations Image Ground truth
NUS_DET_SPR_GC_SP BONN_O2PCPMC_FGT_SEGM

Example segmentations Image Ground truth
NUS_DET_SPR_GC_SP BONN_O2PCPMC_FGT_SEGM

Example Segmentations Image Ground truth
NUS_DET_SPR_GC_SP BONN_O2PCPMC_FGT_SEGM

Apply these object classifiers to videos, frame by frame?
Inputframe
Ground truth labels
2D MRF results
00001TP_008820 00001TP_008850
VGSresults
00001TP_008880Name

Markov Random Field (MRF) for modeling Spatiotemporal Priors
spati
al
hidde
n lab
els
obse
rved
noisy
labe
lstemporal
first order spatial neighborhood
higher order spatial neighborhood
temporalneighborhood

Generic MRF Formulation for classification taks
E2 (mµ,m⌫) = 1� � (mµ,m⌫)
E [{mµ : µ 2 G}]
=X
µ2G
E1 (I (S [µ]) ,mµ) + �X
hµ,⌫i
E2 (mµ,m⌫)
E1 (I (S [µ]) ,mµ) = � logP⇣mµ
��� I (S [µ])⌘

Major technical contributions, MRF for modeling Spatiotemporal Priors
Name Application Description
Bilayer MRFVideo Label Propagation
An additional layer of hidden variables to model the motion v.s. appearance model weights.
Higher Order Proxy
Neighborhood
Joint segmentation and classification
Longer range spatial smoothness with traditional 1st
order neighborhood.
Video Graph-Shifts
Joint segmentation and classification
in videos
Simultaneously estimate the motion priors while doing
multiple semantic class labeling.

Subproblem 1 Bootstrapping the Classifier
Training process by using Hierarchical Supervoxels

The inconsistent and time consuming task of pixel labeling
Seq05VD_f02400Seq05VD_f02370Seq05VD_f02340
input
frame
semantic
object
label
roadsidewalk
sign
From the Cambridge Video Driving Dataset

Video pixel label propagation
FG
Traditional Spatial Propagation
Pixel label map
Label a subset of pixels
BG
Spatio-temporal Propagation
time

Optical Flow should do it?

Bidirectional optical flow frame 20
Black & Anadan Classic+NL
Bidirectional optical flow frame 60
Black & Anadan Classic+NL
Maybe a different optical flow algorithm?

Why optical flow alone fails
a hole occurs the dragging effect
Forward Flow Reverse Flow
multiple incomingflows
t t+1 t t+1

Train a appearance model on the user annotated frame?
0
10
20
30
40
50
60
70
80
90
100
1 11 21 31 41 51 61 71
!"#$%&#'(#$)*#&+,-'!../$%.0'1"
#$'23#'4#5/#-.#'
X:do-nothing
M:forward-flow
A:patch

Try again?
Motion-only Propagation Appearance-only Propagation50.00
55.00
60.00
65.00
70.00
75.00
80.00
85.00
90.00
95.00 100.00
1 11 21 31 41 51 61 71 81
!"#$%&#'(#$)*#&+,-'!../$%.0'1"
#$'23#'4#5/#-.#'
X:do-nothing
M:forward-flow
A:patch

Maybe we should do something like this?
app.app.
flow
flow
both
both
both
both
flow
app.

Turns out to be an optical flow reliability estimation problem

How good is our Motion vs Appearance (MvA) weights?
40
80
o. flow only
The Container Sequence
input image GT label app. onlyour method
40
80
input image GT label our method o. flow only app. only
The Garden Sequence

Well, there’s still problems-1
0.4
0.5
0.6
0.7
0.8
0.9
1
1 11 21 31 41 51 61 71
How to Weigh between Mot and App?
Fixed weight for all pixel
Naïve cross-correlation
Occlusion-aware cross corr.
Bidirectional flow consistency

Well, there’s still problems-2
Initial Noisy WvA weight map
Optimized WvA map with our bilyaer MRF
bus
socc
er
Target framefor propagation Ground Truth Label

Our bilayer MRF for Label Propagation
Observednoisy values
(Hidden true pixel labels)
(Hidden true WvA weights)
1st layer of MRF
2nd layer of MRF
label change at causes to change
as well as causing the WvA layer's energy to change
Our proposed Bilayer MRF for Video Pixel Label Pixel Label Propagatoin

Resultsframe 1 frame 75frame 50frame 25
stef
an
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
1 11 21 31 41 51 61 71
Stefan (tenis) Sequence
Appearance uni-model
Appearance multi-model
Do nothing
Bidirectional flow
Bad (fixed) WvA weights
Our method

Resultsso
ccer
frame 1 frame 75frame 50frame 25
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 11 21 31 41 51 61
Soccer Sequence
Appearance uni-model
Appearance multi-model
Do nothing
Bidirectional flow
Our method
Bad WvA weights

Resultsbu
s
frame 1 frame 75frame 50frame 25
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 11 21 31 41 51 61 71
Bus Sequence
Do nothing
Bidirectional flow
Appearance uni-model
Bad (fixed) MvA weight
Our method

Good, but far from perfect
• Overall accuracy still low
• Object Boundaries crossed
• Optical flow reliability estimation still noisy
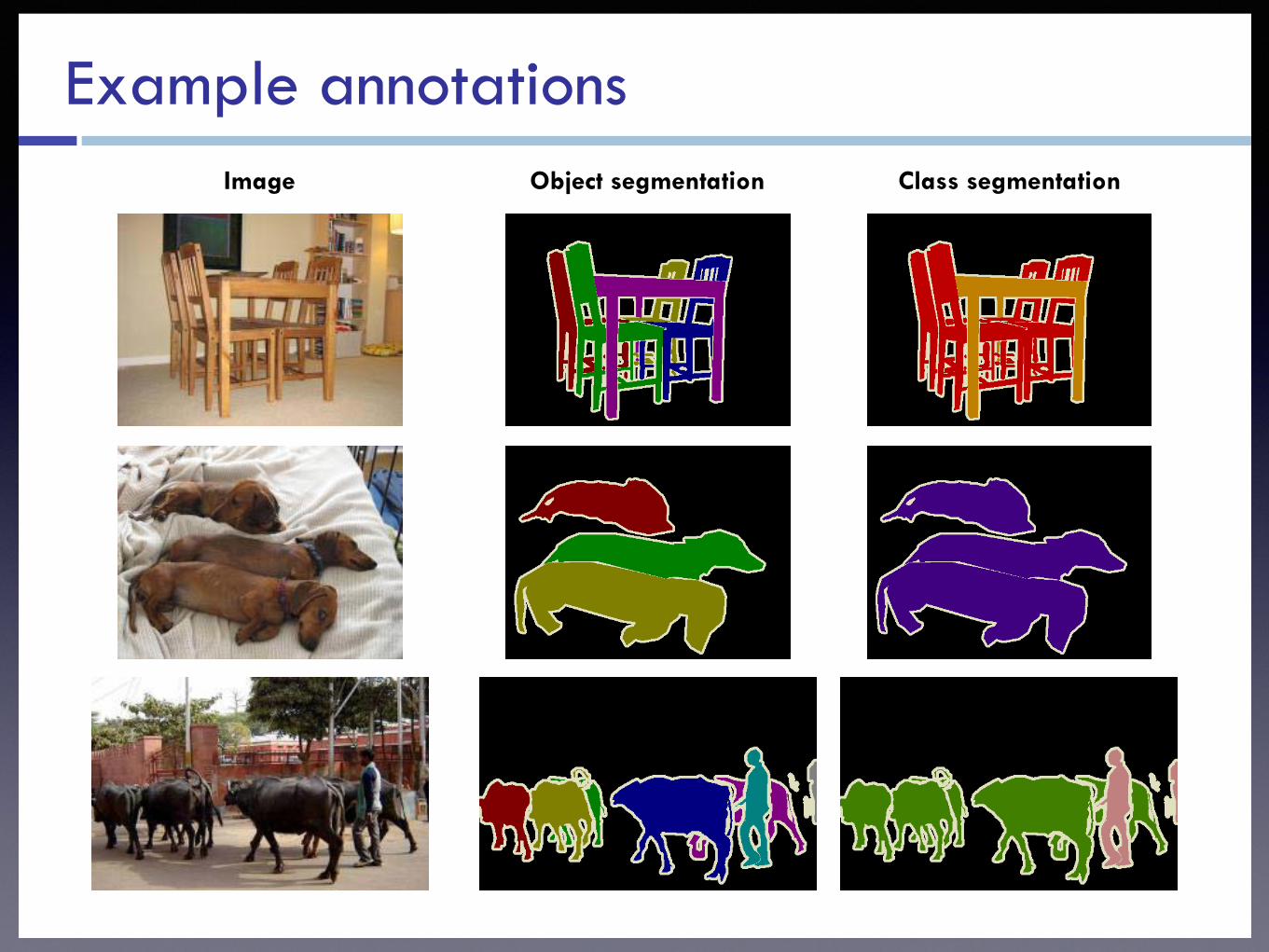
Hierarchical Supervoxel Fusion (HSF) for Pixel Labeling
input video: supervoxelhierarchy
self-augmented appearance model:
supervoxel flow:
classifierHSF-basedPixel-label
Propagation

What does HSF buy us?
• 100x more data for the appearance model.
• Supervoxel-level correspondences instead of just pixel-level optical flow.
• State-of-the-art pixel label propagation performance.

Supervoxel Hierarchy and the “right scale”


The HSF Process
y
Hierarchical Supervoxel Fusion
x
t
Label Consistency Maps
SupervoxelHierarchy
y
x
t
vehicle flower tree
y
x
t
input video:

Automatic Selection of the Maximum Hierarchy Height
Bus tree horse car flower sign road24x 3x 48x 33x 8x 18x
Container bldg grass tree sky water road boat91x 109x 93x 100x 90x 116x 89x
Garden bldg tree sky flower96x 54x 31x 60x
Ice face sign road body37x 22x 89x 65x
Paris tree face book body113x 127x 105x 44x
Salesman tree face book111x 102x 84x
Soccer grass tree face sign dog body66x 83x 14x 28x 15x 62x
Stefan grass face sign chair body83x 1x 75x 1x 83x
Camvid bldg tree/grasssky road pavemt. concr. roadmk.6x 25x 1170x 176x 76x 20x 1756x
Table 3.1: Increase in training set size of the self-augmented training set (donethrough Hierarchical Supervoxel Fusion) over the original training set.
Seq\ Lv 6 7 8 9 10 11 12 13 14 15Bus 4.22% 6.11% 8.93% 9.44% 10.71% 18.57% 22.00% 27.55% 35.96% 47.36%Container 0.08% 0.07% 0.16% 0.44% 0.86% 2.37% 3.28% 6.69% 14.11% 21.75%Garden 0.83% 1.74% 2.66% 3.90% 6.21% 11.37% 20.12% 29.74% 30.43% 50.68%Ice 0.11% 0.28% 0.89% 1.54% 1.99% 2.21% 2.32% 2.32% 2.41% 27.04%Paris 0.38% 0.46% 0.73% 1.30% 2.02% 3.68% 9.02% 9.48% 11.32% 13.93%Salesman 0.31% 0.46% 0.66% 1.58% 4.00% 7.18% 10.23% 20.99% 24.17% 25.01%Soccer 0.29% 0.49% 0.61% 1.31% 1.57% 1.70% 5.43% 19.12% 33.89% 38.57%Stefan 0.42% 0.74% 1.10% 1.38% 1.69% 1.91% 2.45% 3.97% 6.73% 39.70%Camvid 1.72% 3.55% 6.23% 7.51% 11.06% 18.45% 25.84%
Table 3.2: Automatic Hierarchy Height Selection by computing the SupervoxelBoundary Error on the user annotated frame. The shaded levels are discarded sincetoo many of the supervoxels violate the user-defined boundaries.
algorithm needs to estimate is logarithmic to the number of pixels. On the same machine us-
ing Matlab implementations, our supervoxel flow algorithm takes only seconds per frame,
while per-pixel optical flow based propagation takes minutes to hours (based on the code
released with [35]. By exploiting the supervoxel hierarchy structure and merging the su-
pervoxel flows computed at different levels (similar to computing optical flows at different
46
Supervoxel boundary error on the user annotated frame.

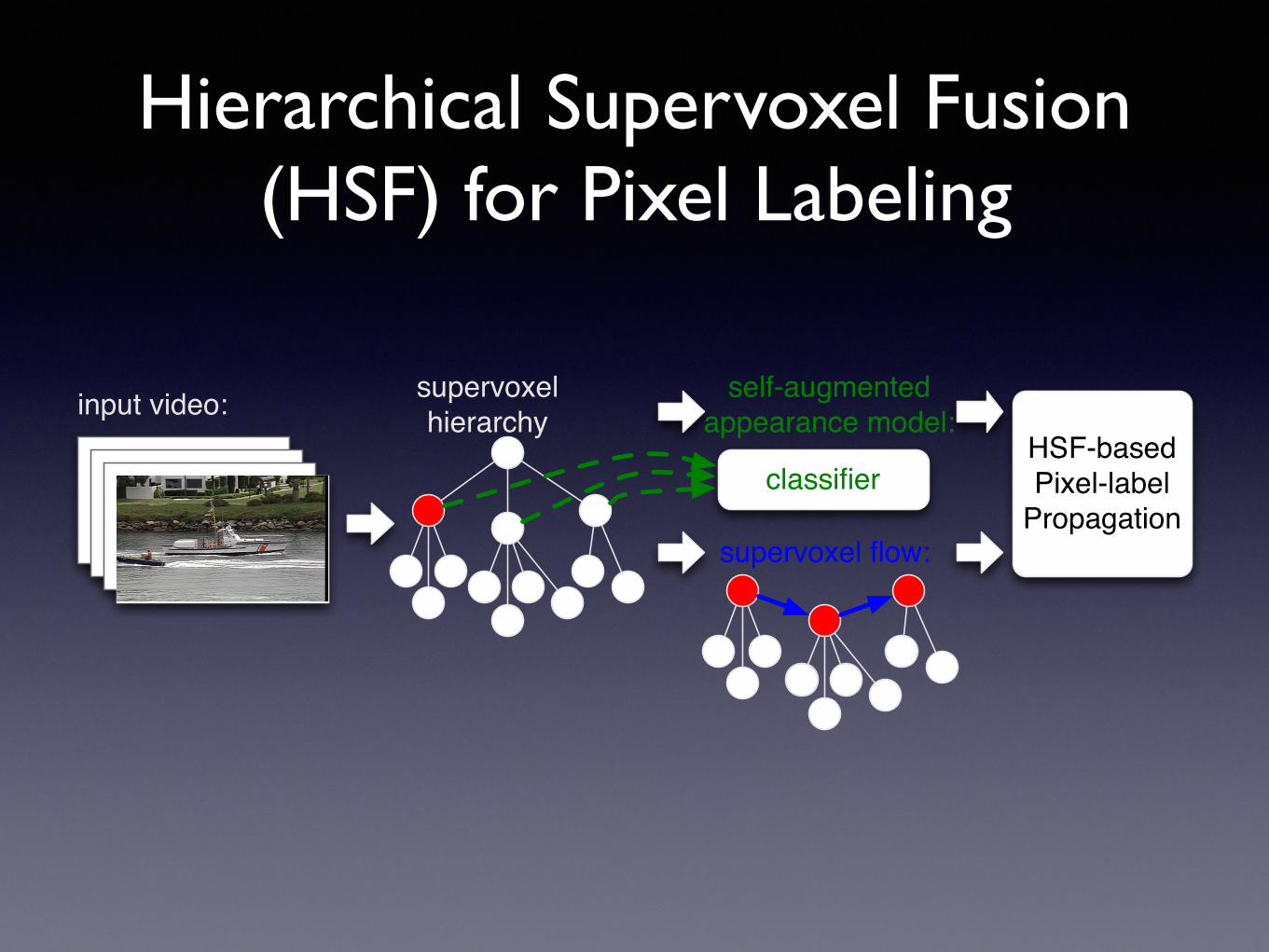
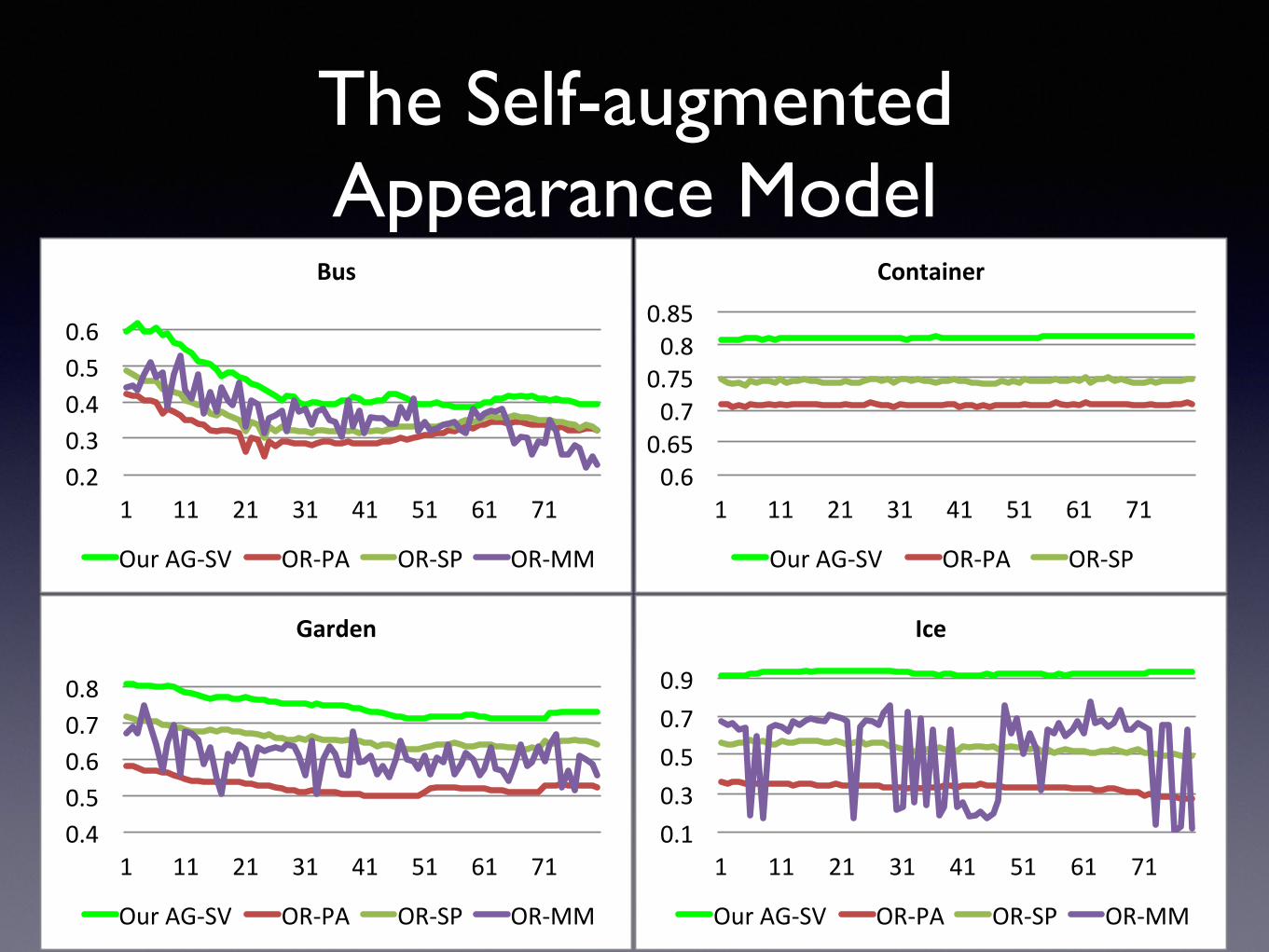
The Self-augmented Appearance Model
Bus tree horse car flower sign road24x 3x 48x 33x 8x 18x
Container bldg grass tree sky water road boat91x 109x 93x 100x 90x 116x 89x
Garden bldg tree sky flower96x 54x 31x 60x
Ice face sign road body37x 22x 89x 65x
Paris tree face book body113x 127x 105x 44x
Salesman tree face book111x 102x 84x
Soccer grass tree face sign dog body66x 83x 14x 28x 15x 62x
Stefan grass face sign chair body83x 1x 75x 1x 83x
Camvid bldg tree/grasssky road pavemt. concr. roadmk.6x 25x 1170x 176x 76x 20x 1756x
Table 3.1: Increase in training set size of the self-augmented training set (donethrough Hierarchical Supervoxel Fusion) over the original training set.
Seq\ Lv 6 7 8 9 10 11 12 13 14 15Bus 4.22% 6.11% 8.93% 9.44% 10.71% 18.57% 22.00% 27.55% 35.96% 47.36%Container 0.08% 0.07% 0.16% 0.44% 0.86% 2.37% 3.28% 6.69% 14.11% 21.75%Garden 0.83% 1.74% 2.66% 3.90% 6.21% 11.37% 20.12% 29.74% 30.43% 50.68%Ice 0.11% 0.28% 0.89% 1.54% 1.99% 2.21% 2.32% 2.32% 2.41% 27.04%Paris 0.38% 0.46% 0.73% 1.30% 2.02% 3.68% 9.02% 9.48% 11.32% 13.93%Salesman 0.31% 0.46% 0.66% 1.58% 4.00% 7.18% 10.23% 20.99% 24.17% 25.01%Soccer 0.29% 0.49% 0.61% 1.31% 1.57% 1.70% 5.43% 19.12% 33.89% 38.57%Stefan 0.42% 0.74% 1.10% 1.38% 1.69% 1.91% 2.45% 3.97% 6.73% 39.70%Camvid 1.72% 3.55% 6.23% 7.51% 11.06% 18.45% 25.84%
Table 3.2: Automatic Hierarchy Height Selection by computing the SupervoxelBoundary Error on the user annotated frame. The shaded levels are discarded sincetoo many of the supervoxels violate the user-defined boundaries.
algorithm needs to estimate is logarithmic to the number of pixels. On the same machine us-
ing Matlab implementations, our supervoxel flow algorithm takes only seconds per frame,
while per-pixel optical flow based propagation takes minutes to hours (based on the code
released with [35]. By exploiting the supervoxel hierarchy structure and merging the su-
pervoxel flows computed at different levels (similar to computing optical flows at different
46
Increase in the number of pixels available for training the appearance model.
0.2$0.3$0.4$0.5$0.6$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$
Bus$
Our$AG0SV$ OR0PA$ OR0SP$ OR0MM$
0.6$0.65$0.7$
0.75$0.8$
0.85$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$
Container)
Our$AG1SV$ OR1PA$ OR1SP$
0.4$0.5$0.6$0.7$0.8$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$
Garden'
Our$AG1SV$ OR1PA$ OR1SP$ OR1MM$
0.1$0.3$0.5$0.7$0.9$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$
Ice$
Our$AG1SV$ OR1PA$ OR1SP$ OR1MM$
The Self-augmented Appearance Model

Supervoxel flow propagation performance-1
0.2$
0.4$
0.6$
0.8$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$ 81$
Bus$
HD.OF$ SF.BI.OF$ SVXL.flow$
0.2$0.4$0.6$0.8$1$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$ 81$
Garden'
HD.OF$ SF.BI.OF$ SVXL.flow$
0.4$0.5$0.6$0.7$0.8$0.9$1$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$
Ice$
HD/OF$ SF/BI/OF$ SVXL/flow$
0.5$0.6$0.7$0.8$0.9$1$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$ 81$
Container)
HD/OF$ SF/BI/OF$ SVXL/flow$
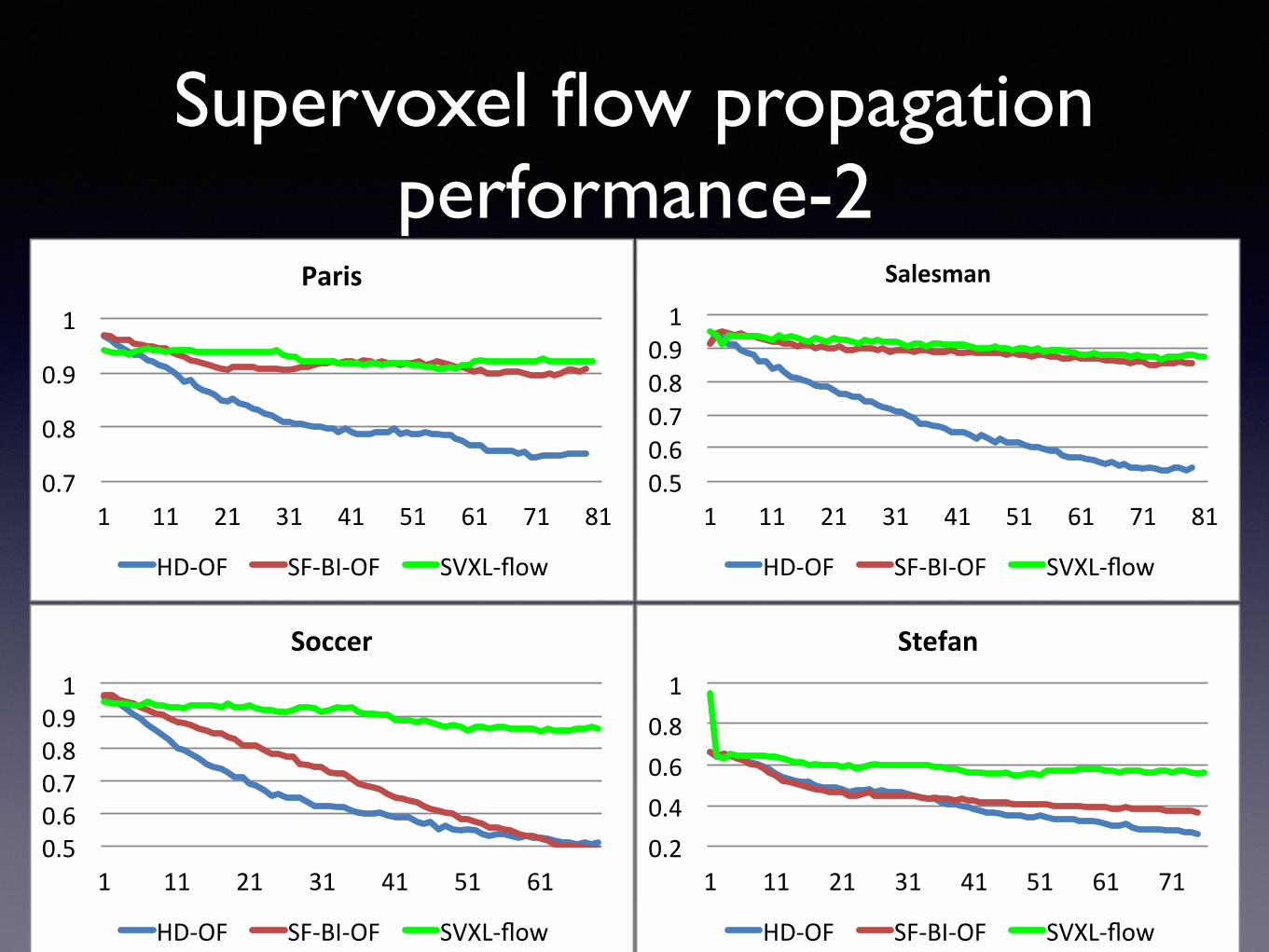
Supervoxel flow propagation performance-2
0.7$
0.8$
0.9$
1$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$ 81$
Paris&
HD/OF$ SF/BI/OF$ SVXL/flow$
0.5$0.6$0.7$0.8$0.9$1$
1$ 11$ 21$ 31$ 41$ 51$ 61$
Soccer&
HD/OF$ SF/BI/OF$ SVXL/flow$
0.5$0.6$0.7$0.8$0.9$1$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$ 81$
Salesman(
HD/OF$ SF/BI/OF$ SVXL/flow$
0.2$0.4$0.6$0.8$1$
1$ 11$ 21$ 31$ 41$ 51$ 61$ 71$
Stefan'
HD.OF$ SF.BI.OF$ SVXL.flow$

Finally, putting everything together, our Hierarchical
Supervoxel Fusion-based Pixel Label Propagation


Subproblem 2 Random Field Priors for
Improving the Spatiotemporal Robustness of Classifiers

Problems with Traditional First Order Neighborhood
µ
ν
ν
ν
ν
µ µ
µ µ

Higher-order Proxy Neighbors
µ
ν
ν
ν
ν
E [{mµn : µn 2 Gn}] = �1
X
µn2Gn
E1 (µn,mµn)
+�2X
µn2Gn
( (µn,mµn)
X
hµn,⌫ni
E2 (µ
n, ⌫n,mµn ,m⌫n)
+�02X
⌫n2Gn
(⌫n,mµn)X
h⌫n,⌧ni\hµn,⌫ni
E2 (⌫n, ⌧n,mµn ,m⌧n)
�)

Energy Minimization via the Graph-Shifts Algorithm
Shift
µ µν ν
P(ν) P(ν) P(µ)P(µ)

Recursive Computation of the Energy
E1 (µn,mµn
) =
⇢E1 (I (S [µn
]) ,mµn) if n = 0P
µn�12C(µn) E1
�µn�1,mµn�1
�otherwise
E2 (µn, ⌫n,mµn ,m⌫n
) =
8><
>:
E2 (mµn ,m⌫n) if n = 0P
µn�12C(µn)⌫n�12C(⌫n)hµn�1,⌫n�1i
E2
�µn�1, ⌫n�1,mµn�1 ,m⌫n�1
�otherwise
The overall energy, specified for level 0, is computed at any level by: E [{mµn : µn 2 Gn}] = �1
X
µn2Gn
E1 (µn,mµn)
+�2X
µn2Gn
(µn,mµn)
X
hµn,⌫ni
E2 (µn, ⌫n,mµn ,m⌫n)
�
where (µn,mµn) =
��D0(µn)��
Pa2D0(µn)
Pha,bi �
⇣An(a), An(b)
⌘

The Shift-Gradient is defined as�E (mµn ! m̂µn)
= E [{m̂µn : µn 2 Gn}]� E [{mµn : µn 2 Gn}]= �1 [E1 (µ
n, m̂µn)� E1 (µn,mµn)]
+ �2
(X
µn2Gn
(µn, m̂µn)
X
hµn,⌫ni
E2 (µn, ⌫n, m̂µn ,m⌫n)
�
�X
µn2Gn
(µn,mµn)
X
hµn,⌫ni
E2 (µn, ⌫n,mµn ,m⌫n)
�).

Visualizing the Graph-Shifts Process and Hierarchy
Input Image lv. 1 lv. 2 lv. 3 lv. 4 lv. 5 lv. 6
The Hierarchy
Input Label shift #0 shift #20 shift #60shift #40
The Energy Minimization Process

Efficiency Improvements of using HOPS
Input Ground Truth Classifier only First-order HOPS
Probability maps output by the classifier, and share by first-order and HOPS's E1 term:void sky water road grass tree(s)
mountain animal/man building bridge
4830 shifts 3769 shifts-22%
vehicle coastline

Efficiency Improvements of using HOPS
Input Ground Truth Classifier only First-order HOPS
Probability maps output by the classifier, and share by first-order and HOPS's E1 term:void sky water road grass tree(s)
2042 shifts 1868 shifts-8.6%
mountain animal/man building bridge vehicle coastline

Qualitative Results of HOPS on the MSRC-21 dataset
Legend void building grass tree cow horse sheep sky mountain aeroplane water facecar bicycle flower sign bird book chair road cat dog body boat
Image
Labels
Firstorder
HOPS
Examples of HOPS outperforming first order neighborhood models Mislabeling by HOPS
Classifier only

Qualitative Results of HOPS on the LHI dataset
Examples of HOPS outperforming first order neighborhood models Mislabeling by HOPS
void sky water road grass tree(s) mountain animal/man building bridge vehicle coastlineLegend
Image
Labels
Firstorder
HOPS
Classifier only

Quantitative Results on the MSRC-21 and LHI datasetsTable 4.1: Comparison of overall accuracy rate on the LHI dataset
Classifier-Only First Order HOPSOverall Accuracy 59.71 72.42 73.48Improvement over classifier-onlyoverall accuracy
12.71 13.77
Percentage gained over first-orderneighborhood’s improvement
8.34%
Table 4.2: Comparison of overall accuracy rate on the MSRC dataset
Classifier-Only First Order HOPSOverall Accuracy 55.87 74.73 75.04Improvement over classifier-onlyoverall accuracy
18.86 19.17%
Percentage gained over first-orderneighborhood’s improvement
1.64%
The optimum weights for the energy models are estimated (learned) during the train-
ing phase, where l1 = 0.7, l2 = 0.3 for first order neighborhood, and l1 = 0.6, l2 = 0.1,
and l
02 = 0.3 for HOPS on both datasets. Note that all images’ long side (either width or
height, depending on either its in landscape or portrait format) in the LHI dataset are 360
pixels, while the MSRC dataset images have a long side of only 200 pixels. HOPS scales
well without the need of learning a separate set of weights for images of different sizes due
to the re-weighting scheme introduced in Sec. 4.3.3. A more sophisticated re-weighting
scheme can also be used, as long as the number of nodes inside ones higher-order neigh-
borhood should be below a certain percentage of the total number of nodes in the hierarchy
layer.
4.4.2 Labeling Results and Accuracy
With more contextual information taken into consideration, HOPS observes a 73.48%
overall labeling accuracy on the LHI datset, while the first-order model obtain 72.42% and
classifier-only result is 59.71%. Notice that, with all the modeling of stochastic interaction
66
Table 4.1: Comparison of overall accuracy rate on the LHI dataset
Classifier-Only First Order HOPSOverall Accuracy 59.71 72.42 73.48Improvement over classifier-onlyoverall accuracy
12.71 13.77
Percentage gained over first-orderneighborhood’s improvement
8.34%
Table 4.2: Comparison of overall accuracy rate on the MSRC dataset
Classifier-Only First Order HOPSOverall Accuracy 55.87 74.73 75.04Improvement over classifier-onlyoverall accuracy
18.86 19.17%
Percentage gained over first-orderneighborhood’s improvement
1.64%
The optimum weights for the energy models are estimated (learned) during the train-
ing phase, where l1 = 0.7, l2 = 0.3 for first order neighborhood, and l1 = 0.6, l2 = 0.1,
and l
02 = 0.3 for HOPS on both datasets. Note that all images’ long side (either width or
height, depending on either its in landscape or portrait format) in the LHI dataset are 360
pixels, while the MSRC dataset images have a long side of only 200 pixels. HOPS scales
well without the need of learning a separate set of weights for images of different sizes due
to the re-weighting scheme introduced in Sec. 4.3.3. A more sophisticated re-weighting
scheme can also be used, as long as the number of nodes inside ones higher-order neigh-
borhood should be below a certain percentage of the total number of nodes in the hierarchy
layer.
4.4.2 Labeling Results and Accuracy
With more contextual information taken into consideration, HOPS observes a 73.48%
overall labeling accuracy on the LHI datset, while the first-order model obtain 72.42% and
classifier-only result is 59.71%. Notice that, with all the modeling of stochastic interaction
66
LHI
MSRC-21

Problems with existing ways of modeling temporal priors
Doesn't model object motion
frame t-1
frame t
requires pre-computing of optical flow
Initial temporal link
Energy-reduced temporal link
Shift
Overkill, computationally expensive
our video graph-shifts algorithm
frame t-1
frame t-1frame t-1
frame t
frame tframe t

Temporally Consistent Energy Model
(µ, ⇢) =
(0 if mµ 6= m⇢
exp(�↵||Xµ �X⇢||p) otherwise
.
E[{mµ : µ 2 D}] = �1
X
µ2D
E1(I(S[µ]),mµ)
+ �2
X
hµ,⌫i
E2(mµ,m⌫) + �3
X
µ2D
Et(mµ,m⇢)
Et(mµ,m⇢) = 1� (µ, ⇢),⇢ = argmin
||Xµ �X||p, 2 {[⌘ : h0, ⌘i} .

Overview of the Video Graph-Shifts Process
frame t-1 frame tlayer n layer n
layer n+1 layer n+1
TemporalCorrespondent
Change
Shift
µ

Experiments--The Buffalo wintry driving dataset

Experiments--The Buffalo wintry driving dataset

Results sky (others) obstacles road
mjrd5_00003 mjrd5_00004 mjrd5_00005
Inputframe
Ground truth labels
Results:withouttemporallinks
Legend
name
Results:with ourdynamictemporallinks

Results on the Camvid dataset
Inputframe
Ground truth labels
void building tree sky car signroad pedestrian fence pole sidewalk bicyclist
Legend
00001TP_008820 00001TP_008850 00001TP_008880Name
Results:withouttemporallinks
Results:with ourdynamictemporallinks

Results on the Camvid dataset
Inputframe
Ground truth labels
void building tree sky car signroad pedestrian fence pole sidewalk bicyclist
Legend
Name Seq05VD_f01200 Seq05VD_f01230 Seq05VD_f01260
Results:withouttemporallinks
Results:with ourdynamictemporallinks

VGS
building 72.2 20.4 0.5 2.0 0.5 0.3 4.0tree 16.4 79.9 1.4 1.0 0.3 0.9sky 1.1 5.7 92.0 0.4 0.8car 0.5 0.1 68.8 29.7 0.2 0.1 0.6
sign 80.3 7.1 12.6road 2.4 93.0 4.6
pedestrian 9.9 16.7 0.1 18.9 1.1 25.0 0.4 12.9 12.8 2.2fence 43.4 2.2 23.0 15.6 3.8 5.2 6.2 0.6
column 12.4 37.5 18.4 7.3 1.2 0.6 20.4 1.9 0.3sidewalk 2.6 59.7 37.5 0.1bicyclist 7.6 6.7 23.5 20.3 14.2 11.8 6.2 9.7
2D MRF
building 71.6 20.7 0.5 1.9 0.9 0.3 4.2tree 17.0 78.3 1.5 0.9 0.7 0.1 1.5sky 1.2 5.6 91.9 0.4 0.9car 0.3 0.1 62.6 35.9 0.4 0.1 0.6 0.1
sign 76.0 8.2 15.8road 1.6 93.7 4.7
pedestrian 12.5 23.3 0.1 19.4 2.3 17.7 0.8 6.6 16.3 0.8fence 47.0 2.1 22.6 17.8 4.3 0.1 6.1
column 13.0 36.4 19.0 6.7 0.1 1.2 0.9 20.8 1.9sidewalk 1.6 62.0 36.3bicyclist 9.4 4.6 24.8 20.5 27.7 1.8 6.0 5.3
Table 5.2: Confusion matrices of VGS (left) versus the 2D MRF results (right) onthe testing set of the camvid dusk sequences. Empty cells have values < 0.1. Globalaccuracy rate is 81.40% for VGS versus 80.52% for 2D MRFs while the per-class av-erage accuracy rate is 45.31% versus 43.47%. Note that the high intra-class varianceof the car, pedestrian, and bicyclist classes causes the classifier to output inconsistentresults, and the temporal consistency constraint in VGS help improve the accuracyrate by 6.2%, 7.3%, and 4.4% respectively while remaining largely the same for theremaining more static classes.
ments. Experiments on our new wintry driving video dataset and the CamVid benchmark
show that our VGS algorithm not only produces visually more consistent segmentation re-
sults, but also quantitative improvements over plain 2D MRFs. A consistent 5% to 10%
improvement is observed on the classes where the classier alone suffers from noise and
large intra-class variance.
92
Results on the Camvid dataset

Subproblem 3 Adapting the Learned
Classifiers to work in new Domains

Motivation
• Similar images often share the same parameter configuration for many computer vision algorithms.
• Utilize this knowledge to develop meta-classifiers (classifiers for classifiers).
• Utilize the local smoothness priors to speed up the parameter space exploration, as well as aid the adaptation process.

Objective function projection
Parameter Space
xa
xbxc
xd
Objective Space
f(xa)
f(xb)f(xc)
f(xd)
f(x) = [f1(x),f2(x),…,fj(x)]: unknown, non-linear, non-convex function

Optimal Config. Exploration
Parameter Space
x1
x2
Objective Space
f(x1)
f(x2)Pareto Front
x3
f(x3)
f()
1. Given two points f(x1), f(x2) in the objective space, determine whether the unknown projection function f() is locally linear by performing our SPEA2-LLP algorithm.
Objective Space
f(x1)
f(x2)Pareto Front
f ’
2. If Dist( f ’, f(x3) ) is large, f() is non-linear between f(x1), f(x2). Break into smaller intervals and do SPEA2-LLP until converge.
f(x3)
Dist(f ’, f(v3))
Objective Space
f(x1) f(x2)
Pareto Front
f ’f(x3)
Dist(f ’, f(x3))
3. If Dist( f ’, f(x3) ) is small, sample a few more points before concluding that f() is linear between f(x1), f(x2).
f ’
x3 = w1x1+w2x2f ’ = w1f(x1)+w2f(x2)i
xi
vi
f(xi)
f(xi)
xi xi
f(xi)

Earlier results-binarization
Test Image: DIBCO 2009, H04
Using PIE to automatically determine the binarization param. in a sliding window.
(PIE trained on a different randomly selected separate from DIBCO2011)
Precision-recall of PIE (blue ◊) vs. different fixed param. (red □)
Test Image: DIBCO 2009, P04
PIE result
Binarization Result Comparison (prior to post-processing & noise removal)
One of the hand picked fixed parameter binarization result. It cannot adapt to the
changing background intensity.
Hand picked fixed parameter result
Precision-recall of PIE (blue ◊) vs. different fixed param. (red □)
Using a sliding window, using the previously learned optimal parameter configuration for every location.

Earlier results-binarization
Test Image: DIBCO 2009, H04
Using PIE to automatically determine the binarization param. in a sliding window.
(PIE trained on a different randomly selected separate from DIBCO2011)
Precision-recall of PIE (blue ◊) vs. different fixed param. (red □)
Test Image: DIBCO 2009, P04
PIE result
Binarization Result Comparison (prior to post-processing & noise removal)
One of the hand picked fixed parameter binarization result. It cannot adapt to the
changing background intensity.
Hand picked fixed parameter result
Precision-recall of PIE (blue ◊) vs. different fixed param. (red □)

Earlier results Segmentation on BSDS-500
σ=1
.2, k
=500
min
=100
Input ImageGroundtruth
(one of the many) Our resultBad InferencePFF default param.
σ=0.8, k=300
σ=0
.22,
k=6
88m
in=1
67 σ
=0.8
8, k
=442
min
=100
σ=0
.6, k
=500
min
=600
σ=0
.88,
k=4
42m
in=1
00
σ=0
.5, k
=500
min
=800

Additional Results from using the Parameter Inference Engine
(PIE) on other problems

Segmentation on the Weizmann Horse Dataset

Segmentation on the Weizmann Horse Dataset

PIE as an Ensemble Combiner
PIE Equal WeightsClass Per-Class Precision.
(for 100 and 10,000initial points)
Overall Average Ac-curacy (for 100 and10,000 initial points)
Per-ClassPrecision
OverallAverageAccuracy
Bass 70.97/76.67 80.56/82.41 58.82 74.07Grand Piano 88.89/94.74 80.56/82.41 76.47 74.07Minaret 100/100 79.63/82.41 96.43 74.07Soccer Ball 83.33/80.77 81.48/83.33 68.97 74.07Average 85.80/88.04 80.56/82.64 75.17 74.07Average PIE Im-provements (%)
14.13/17.12 8.75/11.56
Table 6.1: Results 1
PIE Equal WeightsClass Per-Class Precision.
(for 100 and 10,000initial points)
Overall Average Ac-curacy (for 100 and10,000 initial points)
Per-ClassPrecision
OverallAverageAccuracy
Faces 71.33/71,67 60.82/60.60 70.71 58.83airplanes 74.88/73.36 60.49/60.60 68.38 58.83anchor 9.52/16.67 60.38/60.49 5.00 58.83ant 34.78/50.00 60.26/60.15 28.57 58.83barrel 35.71/63.64 60.71/60.60 18.19 58.83bass 31.82/23.33 60.49/60.38 16.13 58.83beaver 20.69/23.53 60.93/60.26 18.37 58.83binocular 58.82/61.11 60.26/60.60 47.37 58.83bonsai 69.23/64.29 60.26/60.60 50.00 58.83brain 70.97/69.01 60.04/60.71 59.52 58.83brontosaurus 100/100 60.04/60.60 0.00 58.83car side 59.42/62.40 60.49/60.71 57.35 58.83Average 53.10/56.58 60.43/60.52 36.63 58.83Avg. PIE Im-provements (%)
44.95/54.47 2.72/2.88
Table 6.2: Results 2
images based on the ground truths, achieving a percentage improvement of 14.13% and
17.12% for per-class precision, and 8.75% and 11.56% for overall accuracy using 100 and
100000 initial points respectively. In this case, the difference between the number of initial
points of this magnitude is significant in terms of performance improvement.
For the 12 classes experiment, the improvements are 44.95% and 54.47% for per-
class accuracy, and 2.72% and 2.88% for overall accuracy for 100 and 1000 initial points.
122
• Random forest with 100 randomized trees, binary test at each node, and learned by maximum information gain on a dictionary of 1024 quantized SIFT feature vectors.
4 class subset from Caltech 101, 15 training per class

PIE as an Ensemble Combiner
• aa
PIE Equal WeightsClass Per-Class Precision.
(for 100 and 10,000initial points)
Overall Average Ac-curacy (for 100 and10,000 initial points)
Per-ClassPrecision
OverallAverageAccuracy
Bass 70.97/76.67 80.56/82.41 58.82 74.07Grand Piano 88.89/94.74 80.56/82.41 76.47 74.07Minaret 100/100 79.63/82.41 96.43 74.07Soccer Ball 83.33/80.77 81.48/83.33 68.97 74.07Average 85.80/88.04 80.56/82.64 75.17 74.07Average PIE Im-provements (%)
14.13/17.12 8.75/11.56
Table 6.1: Results 1
PIE Equal WeightsClass Per-Class Precision.
(for 100 and 10,000initial points)
Overall Average Ac-curacy (for 100 and10,000 initial points)
Per-ClassPrecision
OverallAverageAccuracy
Faces 71.33/71,67 60.82/60.60 70.71 58.83airplanes 74.88/73.36 60.49/60.60 68.38 58.83anchor 9.52/16.67 60.38/60.49 5.00 58.83ant 34.78/50.00 60.26/60.15 28.57 58.83barrel 35.71/63.64 60.71/60.60 18.19 58.83bass 31.82/23.33 60.49/60.38 16.13 58.83beaver 20.69/23.53 60.93/60.26 18.37 58.83binocular 58.82/61.11 60.26/60.60 47.37 58.83bonsai 69.23/64.29 60.26/60.60 50.00 58.83brain 70.97/69.01 60.04/60.71 59.52 58.83brontosaurus 100/100 60.04/60.60 0.00 58.83car side 59.42/62.40 60.49/60.71 57.35 58.83Average 53.10/56.58 60.43/60.52 36.63 58.83Avg. PIE Im-provements (%)
44.95/54.47 2.72/2.88
Table 6.2: Results 2
images based on the ground truths, achieving a percentage improvement of 14.13% and
17.12% for per-class precision, and 8.75% and 11.56% for overall accuracy using 100 and
100000 initial points respectively. In this case, the difference between the number of initial
points of this magnitude is significant in terms of performance improvement.
For the 12 classes experiment, the improvements are 44.95% and 54.47% for per-
class accuracy, and 2.72% and 2.88% for overall accuracy for 100 and 1000 initial points.
122
12 class subset from Caltech 101, 15 training per class

Conclusion
• Spatiotemporal priors for pixel label propagation in space-time volumes: Bilayer MRF and HSF based propagation.
• HOPS for longer range spatial modeling, VGS for dynamic temporal modeling.
• PIE for utilizing the localness priors to explore & adapt parameter configurations.
• Full potential of spatiotemporal priors still frequently overlooked.

Publications1. W. Wu, A. Y. C. Chen, L. Zhao, and J. J. Corso. Brain tumor detection and segmentation in a CRF framework with pixel-wise
affinity and superpixel-level features. International Journal of Computer Assisted Radiology and Surgery, 2015.
2. S. N. Lim, A. Y. C. Chen and X. Yang. Parameter Inference Engine (PIE) on the Pareto Front. In Proceedings of International Conference of Machine Learning, Auto ML Workshop, 2014.
3. A. Y. C. Chen, S. Whitt, C. Xu, and J. J. Corso. Hierarchical supervoxel fusion for robust pixel label propagation in videos. In Submission to ACM Multimedia, 2013.
4. A.Y.C. Chen and J.J. Corso. Temporally consistent multi-class video-object segmentation with the video graph-shifts algorithm. In Proceedings of IEEE Workshop on Applications of Computer Vision, 2011.
5. D.R. Schlegel, A.Y.C. Chen, C. Xiong, J.A. Delmerico, and J.J. Corso. Airtouch: Interacting with computer systems at a distance. In Proceedings of IEEE Workshop on Applications of Computer Vision, 2011.
6. A.Y.C. Chen and J.J. Corso. On the effects of normalization in adaptive MRF Hierarchies. In Proceedings of International Symposium CompIMAGE, 2010.
7. A.Y.C. Chen and J.J. Corso. Propagating multi-class pixel labels throughout video frames. In Proceedings of IEEE Western New York Image Processing Workshop, 2010.
8. A. Y. C. Chen and J. J. Corso. On the effects of normalization in adaptive MRF Hierarchies. Computational Modeling of Objects Represented in Images, pages 275–286, 2010.
9. Y. Tao, L. Lu, M. Dewan, A. Y. C. Chen, J. J. Corso, J. Xuan, M. Salganicoff, and A. Krishnan. Multi-level ground glass nodule detection and segmentation in ct lung images. Medical Image Computing and Computer-Assisted Intervention, 2009.
10. A.Y.C. Chen, J.J. Corso, and L. Wang. Hops: Efficient region labeling using higher order proxy neighborhoods. In Proceedings of IEEE International Conference on Pattern Recognition, 2008.