Embed Size (px)
DESCRIPTION
Citation preview

Results from the test track in the eVALUE project
Fredrik Bruzelius, Mattias Hjort, Håkan Andersson

Fredrik BruzeliusResearcher – Vehicle technology and Simulation (FTS) @ the Gothenburg office
Main interestsVehicle dynamics, vehicle modeling, tire modeling, active safety functions; testing, classification and performance
Ongoing/planed projects•Classification of winter tires, ”what is a winter tire?”•ESC performance on slippery surfaces and the interaction of tire characteristics•Vehicle models for driving simulators•Chassis-tuning in driving simulators
Academic backgroundMSc in Applied Mathematics, PhD in Automatic Control

The eVALUE Project Overview
● An EU seventh frame program project● Eight partners all over Europe● Started in January 2008 and ended in December 2010● Over all budget of 3.76 M€

Project objectives/motivation
Active safety is a key measure when it comes to decreasing traffic accidents, injuries and deaths.
Active safety functions are introduced into new vehicles, so far only in premium vehicles.
However, and in opposition to passive safety, the car buyer cannot judge the performance of a vehicle’s active safety based on objective measures.
Every vehicle OEM is promoting active safety, but mainly on functionality rather than on safety impact.
Need for objective test methods for active safety!
Promote active safety by increase the public awareness through a test program (c.f. NCAP)
Support the development of active safety functions

The approach
Accidents
Relevant scenarios
Testing & Evaluation Methods
Safety Impact
Step 1
Inspections
Step 2
Physical Testing

The approach continued
Scenario based testing
+
Holistic vehicle perspective
● The subject vehicle (target of the test) is treated as one unit
● No function in particular is regarded● The vehicle performance in the
measured, and relates to traffic safety impact via a Safety Performance Indicator
● Simpler to grasp the point for the end customer: How did the vehicle perform in that critical situation?
● Simpler updates, driven by accident statistics rather than the technical development of functions
● Etc, etc

Selected scenarios
Not driven fully by accident statistics due to lack of available information in present databases.
Future databases looks promising to be used in this context. Chosen from common sense, OEM practice, statistics to the
extent there is information Three groups of scenarios
Longitudinal scenarios Lateral scenarios Stability scenarios
Addressing (implicitly) most of the present functions available on the market today as well as at least near future functionality

Selected scenarios: Longitudinal scenarios(rear-end collision situations)
Straight road
Subject vehicle
Target vehicle vt
at , vt
Subject vehicle Target vehicle
Wt
at , vtas, vs
Subject vehicle
Target vehicle
vtvs
Curved road
Transversally moving target

Selected scenarios: Lateral scenarios(Lane/road departure situations, no high slip)
vt
vt
vs
vs
vs
R
vs
R
Subject vehicle
Target vehiclevt
vs
Lane and road departure on a straight road
Lane and road departure on curve /
on a straight road just before a curve
Lane change collision

Selected scenarios: Stability scenarios(high slip situations)
vs
vs
High µ
Low µ
High µ
Low µ
amax
amax
vs
Wt
vs
vs
R
R
R
vs
Emergency breaking on split surfaces
Obstacle avoidance
Highway exit

Development tests: Highway exit
Novel test maneuver tests performed at test track in Germany
(ATP) Steering robot (developed by VTI/Autoliv) to
execute the maneuver with a pre-defined steering wheel angle trajectory (open loop)
Suggested steering normalization: single point characterization adopted from the NHTSA FMVSS126 (sine with dwell)
Suggested measure (Safety performance indicator) is the “ending” vehicle radius
Proposal: Use nonlinear steering geometry characterization and traveled distance in lane as a performance indicator
-80 -60 -40 -20 0 200
10
20
30
40
50
60
70
80
90

Development tests: split surface braking
Standard procedure among OEMs and suppliers as a development test (performed in closed loop)
Steering wheel locked (steering robot) during panic braking (open loop)
The force difference between the two vehicle sides due to the surfaces creates a yawing torque on the vehicle and consequently a yaw motion
The performance trade-off is stability (straight course following) versus stopping distance
A performance index have been developed and tested in field that consider the trade-off and normalizes the tire to road friction.

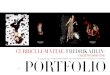
Development tests: rear-end collision scenarios
Standard test procedure at OEMs and suppliers for development purposes
Rear end collision tests with dummy (balloon car) performed at different locations
No moving target tests performed. Difficult task of synchronization.
Braking robot used to achieve repeatability and reproducible results
Braking robot initiated by the warning from the vehicle
Sound, haptic and light warnings can be sensed and used in the robot trigger application!
Collision speed as the strongest candidate for a performance index
0 0.5 1 1.5 2 2.5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Time (s)
Sen
sor
sign
al (
V)
FCW induced robot braking on static target
4 bar: rear pos
2 bar: rear pos3 bar: rear pos
4 bar: front pos

Open issues
How many repetitions is sufficient? Is it determined by the uncertainties of the test method?
How to incorporate the drivers response to the assessment? Is it possible at all? Does it make sense? Is a isolated HMI test sufficient? Closed loop testing is infeasible/impossible!
How to handle missed warnings/interventions? This has a huge impact on the traffic safety and needs to be assessed!
How to handle false warnings/interventions? This might not be as bad as missed warnings for traffic safety but will effect the credibility of the function.
How to ensure that the test environment resembles real world situations? For example, how to ensure that dummy vehicles are detected in a similar manner as a true vehicle by the functions sensor.

Conclusions
Deriving a testing program for active safety is non-trivial! The concept of scenario based testing with a holistic vehicle
view point is sound an proven to work. The concept have been adopted by more recent initiatives (vFSS, ASSESS etc)
Much work remains● Performance indices needs to further developed and establish a
link to a real traffic performance.● Further development of environment, e.g. dummy vehicles,
synchronization between tested vehicle and dummy vehicle etc. etc.
● Further establish repeatability and reproducibility of the test results for different settings; test tracks, test conductors, tires etc. etc.
● Establish acceptance and credibility among OEMs, suppliers and finally car-buyers

Thanks for your attention!