Embed Size (px)
Citation preview

T
DG Grupo de Dinámica de Tethers (GDT)
Dynamics and Stability
of Tethered Satellites at Lagrangian Points†
by
J. Peláez,Technical University of Madrid (UPM), 28040 Madrid, Spain
Workshop on Stability and Instability in Mechanical Systems: Applications and Numerical Tools
Thursday, 4 December 2008, Barcelona
† Supported by ESTEC Contract 21259
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 1/100

T
DG Grupo de Dinámica de Tethers (GDT-UPM) - Cisas (Padova)
Dynamics and Stability of Tethered Satellites at Lagrangian Points†
by
Claudio Bombardelli, Dario Izzo,
ESTEC-ESA, Noordwijk, 2201 AZ, The Netherlands
Enrico C. Lorenzini, Davide Curreli ,
University of Padova, Padova, 35131, Italy
M. Sanjurjo-Rivo, Fernando R. Lucas, J. Peláez,Technical University of Madrid (UPM), 28040 Madrid, Spain
Daniel J. Scheeres,The University of Colorado, Boulder, CO 80309-0429, USA
M. LaraReal Observatorio de la Armada, 11110 San Fernando, Spain
Final Report for the Advanced Concept Team
† Supported by ESTEC Contract 21259
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 2/100

T
DG Tethers fundamentals
In a tethered system, two masses orbiting at different heights share a common orbital
frequencyΩ0 ⇒ The third Kepler law is broken by the tether tension
m1
m2
r1
r2
r0T
T
G
g1
g2
T
DG Tethers fundamentals
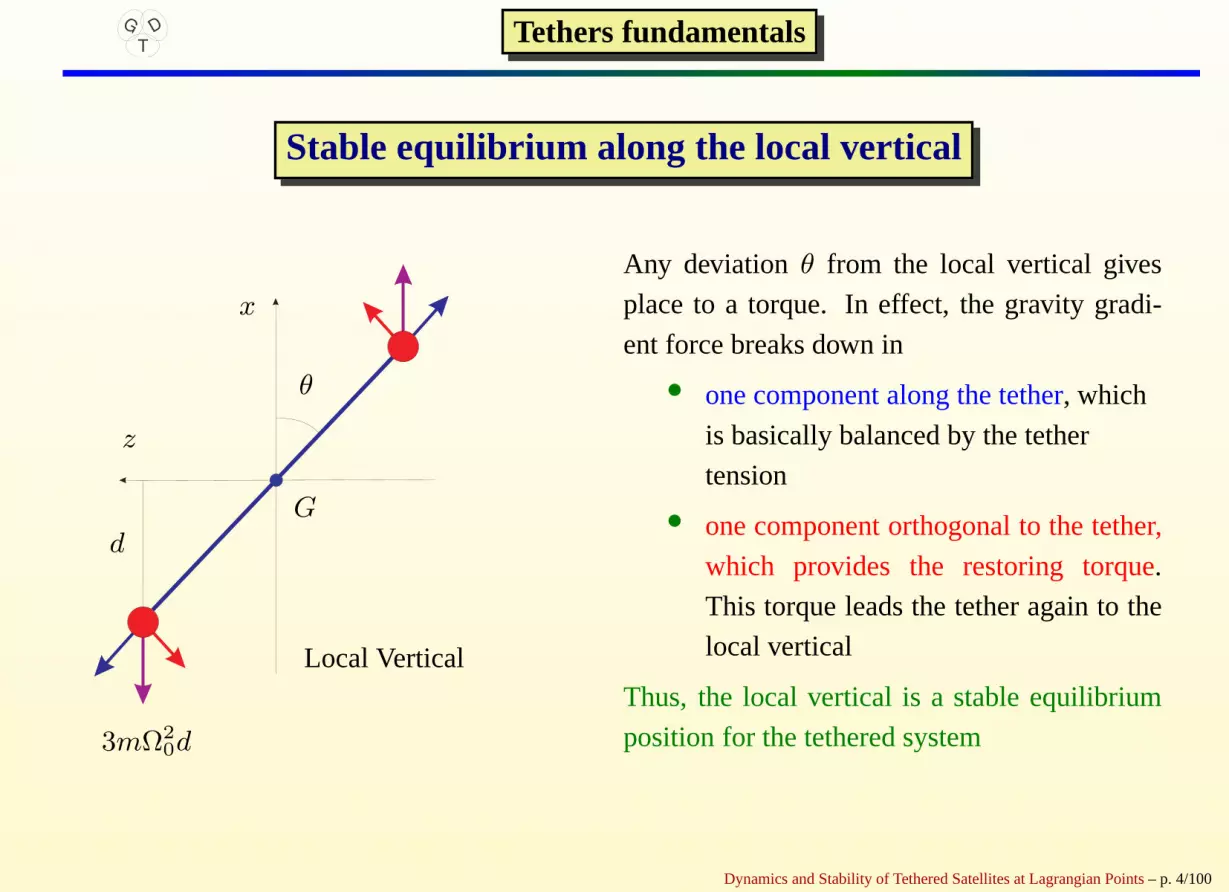
Stable equilibrium along the local vertical
θ
Local Vertical
3mΩ20d
d
G
x
z
Any deviationθ from the local vertical gives
place to a torque. In effect, the gravity gradi-
ent force breaks down in
• one component along the tether, which
is basically balanced by the tether
tension
• one component orthogonal to the tether,
which provides the restoring torque.
This torque leads the tether again to the
local vertical
Thus, the local vertical is a stable equilibrium
position for the tethered system
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 4/100
T
DG Electrodynamic tethers fundamentals
~B
~v~E
~E = ~v × ~Bq+
q−
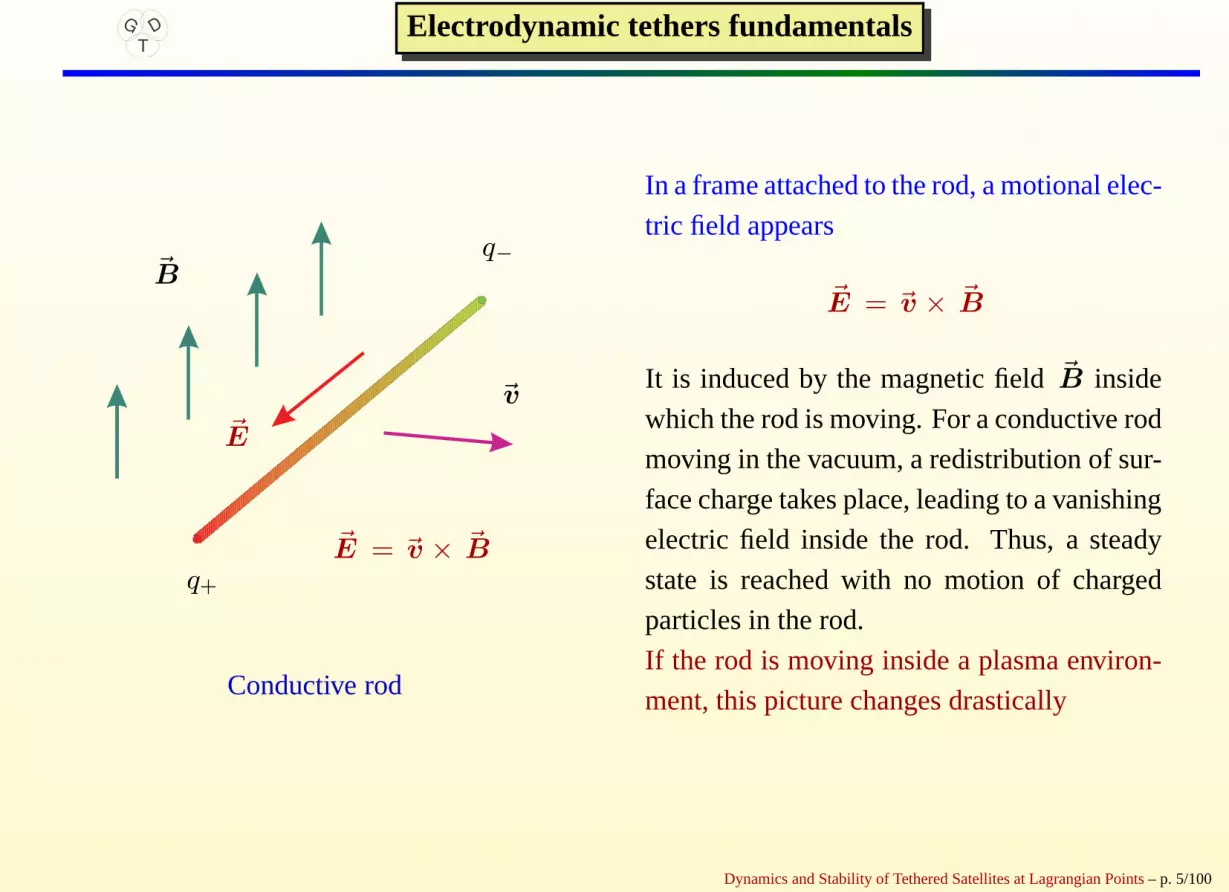
Conductive rod
In a frame attached to the rod, a motional elec-
tric field appears
~E = ~v × ~B
It is induced by the magnetic field~B inside
which the rod is moving. For a conductive rod
moving in the vacuum, a redistribution of sur-
face charge takes place, leading to a vanishing
electric field inside the rod. Thus, a steady
state is reached with no motion of charged
particles in the rod.
If the rod is moving inside a plasma environ-
ment, this picture changes drastically
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 5/100

T
DG 2007 AAS/AIAA Space Flight Mechanics MeetingSedona, Arizona, January 28 - February 1, 2007
Electrodynamic tethers in a plasma environment
e−e−e−
e−
e−
e−
i+
i+
i+
i+
~B
~v
I
q+
q−
The ionospheric plasma makes the electrons
begin to be attracted by the anodic end of the
rod. Similarly, the ions will be attracted by the
cathodic end. Some of these charges will be
trapped by the rod and they produce a current
I which flows inside the conductive mater-
ial. The amount of currentI can be increased
with the help of plasma contactors placed in
the tethers ends.However, the interaction be-
tween the tether currentI and the magnetic
field ~B gives place to forces acting on the
rod. They will break (or accelerate) its mo-
tion (in the figure they are breaking the mo-
tion). Their resultant is: ~F = ~I × ~B L
A permanent tethered observatory at Jupiter. Dynamical analysis – p.5/24

T
DG 2007 AAS/AIAA Space Flight Mechanics MeetingSedona, Arizona, January 28 - February 1, 2007
Electrodynamic tethers in a plasma environment
e−e−e−
e−
e−
e−
i+
i+
i+
i+
~B
~v
I
q+
q−
The ionospheric plasma makes the electrons
begin to be attracted by the anodic end of the
rod. Similarly, the ions will be attracted by the
cathodic end. Some of these charges will be
trapped by the rod and they produce a current
I which flows inside the conductive mater-
ial. The amount of currentI can be increased
with the help of plasma contactors placed in
the tethers ends.However, the interaction be-
tween the tether currentI and the magnetic
field ~B gives place to forces acting on the
rod. They will break (or accelerate) its mo-
tion (in the figure they are breaking the mo-
tion). Their resultant is: ~F = ~I × ~B L
A permanent tethered observatory at Jupiter. Dynamical analysis – p.5/24
T
DG ARIADNA PROGRAM
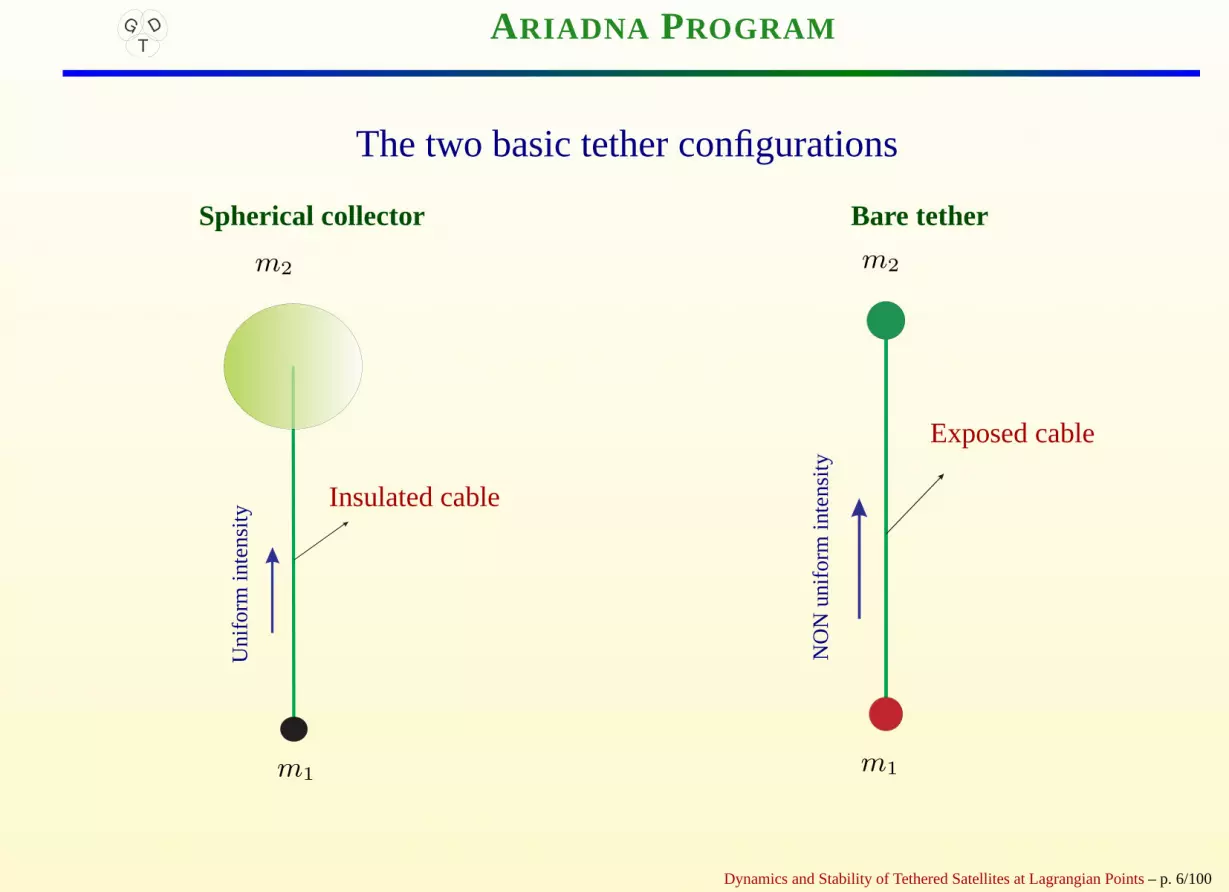
The two basic tether configurations
Spherical collector
m1
m2
Uni
form
inte
nsity
Insulated cable
Bare tether
m1
m2
Exposed cable
NO
Nun
iform
inte
nsity
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 6/100

T
DG Advanced Topics In Astrodynamics – Tethered Systems
TSS-1R. The Tether is partially deployed
Tether Fundamentals – p.13/48

T
DG Advanced Topics In Astrodynamics – Tethered Systems
STS-46 Tethered Satellite System 1 (TSS-1) satellite deployment from OV-104
The satellite is reeled out via its thin Kevlar tether into the blackness of space during deployment operations from the payload bay of Atlantis.
At the bottom of the frame is the satellite upper boom including (bottom to top) the 12-m deployment boom, tip can, the docking ring, and
concentric ring damper. The Langmuir probe and the dipole-field antenna are stowed at either side of the TSS-1 satellite.
Tether Fundamentals – p.10/48

T
DG Background: Tethered satellites and Lagrangian Points
• The Earth-Moon external point (L2). Excellent scenario for many different missions
• Tethers are useful in some specific missions
* Stabilization at Lagrange points (Colombo, Farquhar, Misra)
• ED tethers: may produce power and propulsion in appropriateenvironments
* Jovian world (Sanmartín et all., Peláez and Scheeres, . . . )
* plasma collection is better with straightened tethers
• Tether’s stabilization needs mechanical tension
* Close to a body: gravity gradient (self balanced EDT)
* Far from body: fast rotating tethers
• Dynamics may be quite different from mass-point satellites
* coupled roto-traslational motion (long tethers)
* varying length
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 7/100
T
DG Outline of Presentation
• Gentil Introduction
• Inert Tethers and Periodic Motions
• Io Exploration with Electrodynamic Tethers
• Stability of tethered satellites at lagrangian collinear points
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 8/100
T
DG Diffusion
• Dynamics of tethered libration-points satellites, by
Manuel Sanjurjo Rivo, Fernando R. Lucas & Jesús Peláez,
XI Jornadas de Trabajo en Mecánica Celeste, 25—27 June 2008,Albergue de la Real Fábrica, Ezcaray, La Rioja, Spain
• Dynamic behavior of a fast-rotating tethered satellite, by
M. Lara & Jesús Peláez,
XI Jornadas de Trabajo en Mecánica Celeste, 25—27 June 2008,Albergue de la Real Fábrica, Ezcaray, La Rioja, Spain
• On the dynamics of a tethered system near the colineal libration points, by
M. Sanjurjo-Rivo, F. R. Lucas, J. Peláez, C. Bombardelli, E.C. Lorenzini, D. Curreli, D. J. Scheeres & M. Lara,
AIAA paper 2008-7380, The2008 AAS/AIAA Astrodynamics Specialist Conference and Exhibit , 18—21 Agosto
2008 Hawaii Convention Center and Hilton Hawaiian Village,Honolulu, Hawaii, USA
• Io exploration with electrodynamic tethers, by
C. Bombardelli, E. C. Lorenzini, D. Curreli, M. Sanjurjo-Ri vo, F. R. Lucas, J. Peláez, D. J. Scheeres & M. Lara,
AIAA paper 2008-7384, The2008 AAS/AIAA Astrodynamics Specialist Conference and Exhibit , 18—21 Agosto
2008 Hawaii Convention Center and Hilton Hawaiian Village,Honolulu, Hawaii, USA
Abstracts sent:
• Plasma torus exploration with electrodynamic tethers, by
E. C. Lorenzini, D. Curreli, C. Bombardelli, M. Sanjurjo-Ri vo, F. R. Lucas, J. Peláez, D. J. Scheeres & M. Lara,
19th AAS/AIAA Space Flight Mechanics Meeting, February 8—12, 2009, Savannah, Georgia, USA
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 9/100

T
DG Conclusions
• Gentil Introduction:We have developed the theory that permit the analysis theoretical and
the simulations of tethers, of constant or varying length, inert or electrodynamic, rotating or
non-rotating in the environment provided for a binary system. Some results are completely
new and there is nothing similar in the literature.
• Inert Tethers and Periodic Motions:The influence of the tether length in the existence and
stability of periodic motions associated to Halo orbits hasbeen studied in detail for inert
tethers. Some results are completely new and open interesting research lines and possibilities.
• Io Exploration with Electrodynamic Tethers:All the analysis is an important novelty.
At least two different, and important, research lines have been set up.
• Stability of tethered satellites at lagrangian collinear points: We show that the Hill
approach permits to clarify some obscure details underneath the previous analysis. An
interesting application for the Mars satellites —Deimos orPhobos— can be deduced from our
analysis.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 10/100

T
DG Deimos and Phobos
Mars - Deimos
Magnitude Value Unit
LT 10 km
xE 22.34 km
∆x 200 m
kξ 4
T 72 hours
m 1000 kg
φ 45 deg
Λ 0.1
Mars - Phobos
Magnitude Value Unit
LT 5 km
xE 16.96 km
∆x 125 m
kξ 3
T 72 hours
m 1000 kg
φ 45 deg
Λ 0.1
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 11/100

T
DG ARIADNA PROGRAM
Gentil Introduction
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 12/100

T
DG Gentil Introduction
GOAL : TO GAIN AN INSIGHT INTO THE DYNAMICS OF FAST ROTATING TS
1. Derive the equations of motion of tethered satellites• CRTBP approximation• inert tethers, constant length• coupled (5-DOF) rotational-traslational motion
2. Fast rotating tethers• Average over the (fast) rotation angle
3. Motion “close” to the smaller primary: Hill’s approach• In some interesting cases, rotational and translational motion decouple!
4. Show relevant characteristics of specific applications
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 13/100

T
DG Inertial motion of an inert tether
• Only gravitational forces
• Dumbbell model ⇒ rigid body dynamics:
T = 12
m (x · x) +1
2Ω · I · Ω, V = −
∫
m
µ
‖y‖dm
• m total mass,I central inertia tensor• x position of c.o.m.,y position of mass elements• Ω tether’s rotation vector• µ gravitational parameter of the attracting body
• Lagrangian approach: L = T − V →d
dt
(
∂L
∂qj
)
−∂L
∂qj= 0,
• qj = dqj/dt, qj : generalized coordinates
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 14/100

T
DG The dumbbell model
• Inertial frameOxyz
• Tether-attached frame: originG, unit vectors(u1, u2, u3),• u1 = u, u2 = k × u/‖k × u‖, u3 = u1 × u2,
• u = Ω × u ⇒ Ω = (Ω · u1,Ω · u2,Ω · u3)T
O
m1
m2
G
x
x
x
yy
z
z
θ
ϕ
u

T
DG Gravitational Potential
V = −
∫
m
µ
‖y‖dm
dm = ρLdsα
G
m2
uG
m1
L1
L2
x yu
r = ‖x‖, cos α = u · x/r
f dm
s
O
• Usual expansion of1
‖y‖in Legendre polynomials
V = −µ
r
∫
m
dm√
1 + 2(s/r) cos α + (s/r)2= −
µm
r
∞∑
n≥0
(
L
r
)n
an Pn(cos α)
• an = an(m1, m2, mT ) are functions of tether & end masses (a0 = 1, a1 = 0)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 16/100

T
DG Kinetic analysis
• Kinetic energy: T =1
2m (x · x) +
1
2Ω · I · Ω
• Rotational motion (tether attached frame):
• Inertia tensor (null moment of inertia aroundu):
I =
0 0 0
0 I 0
0 0 I
I = mL2a2 =1
12mL2 (3 sin2 2φ − 2Λ
)
• φ = φ(m1, m2, mT ), Λ = mT /m
• Ω · u = 0 ⇒ Ω · I · Ω = I ‖u‖2
• Position of the tether:u = (cos ϕ cos θ, cos ϕ sin θ, sin ϕ)
• Kinetic energy: T =1
2m(
x2 + y2 + z2)
+1
2I(
ϕ2 + θ2 cos2 ϕ)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 17/100

T
DG Circular Restricted Three Body Problem
m
x1
x2GP
ℓ
mP1
mP2
x
y
zω
~i
~j
~k
O
ℓ2 = (1 − ν)ℓ
νℓ
• + Perturbations acting on the c.o.m (ED forces, size, varyinglength. . .)
• + Attitude dynamics
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 18/100

T
DG Motion relative to the synodic frame
1. Two attractive bodies (primaries). Gravitational forces calculated under two
assumptions: 1) spherical attracting bodies and, 2) small ratios for Lri
• Gravitational potentialVi (i = 1, 2) of each primary:
Vi = −mµi
ri
[
1 + (L
ri)2 a2 P2(cos αi) + O(
L
ri)3]
, cos αi = u·xi/ri
2. Rotating frame ⇒ inertia forces• Constant rotation rateω in thez axis direction• Generalized potential includes
• Coriolis term:m ω (x y − y x)• Rotation term:m (ω2/2) (x2 + y2)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 19/100

T
DG Lagrangian function and non-dimensional variables
1. Lagrangian function
L
m=
1
2(x2 + y2 + z2) + ω (x y − y x) +
ω2
2(x2 + y2) +
µ1
r1+
µ2
r2
+L2 a2
[
µ1
r31
P2(cos α1) +µ2
r32
P2(cos α2) +1
2[ϕ2 + θ2 cos2 ϕ]
]
+ O(L3/r3)
Here,a2 = I/(m L2), 0 < a2 < 1/4
2. Generalized coordinates:x, y, z, ϕ, θ
3. We use non-dimensional variables with characteristics values: total mass of the system,
distanceℓ between primaries,τ = ω t (primaries’ orbit period= 2 π)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 20/100
T
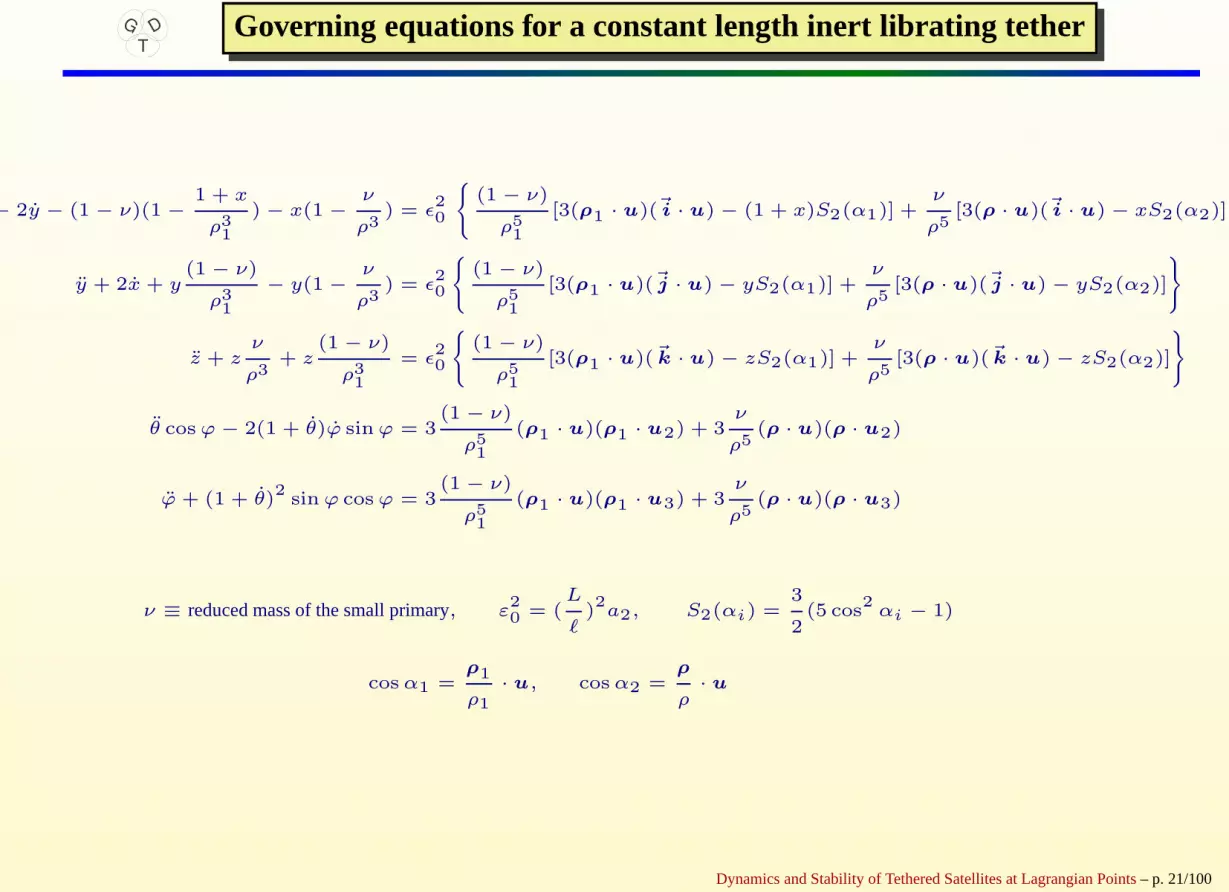
DG Governing equations for a constant length inert librating tether
x − 2y − (1 − ν)(1 −1 + x
ρ31
) − x(1 −ν
ρ3) = ǫ
20
(1 − ν)
ρ51
[3(ρ1 · u)(~i · u) − (1 + x)S2(α1)] +ν
ρ5[3(ρ · u)(~i · u) − xS2(α2)]
y + 2x + y(1 − ν)
ρ31
− y(1 −ν
ρ3) = ǫ
20
(1 − ν)
ρ51
[3(ρ1 · u)(~j · u) − yS2(α1)] +ν
ρ5[3(ρ · u)(~j · u) − yS2(α2)]
z + zν
ρ3+ z
(1 − ν)
ρ31
= ǫ20
(1 − ν)
ρ51
[3(ρ1 · u)(~k · u) − zS2(α1)] +ν
ρ5[3(ρ · u)(~k · u) − zS2(α2)]
θ cos ϕ − 2(1 + θ)ϕ sin ϕ = 3(1 − ν)
ρ51
(ρ1 · u)(ρ1 · u2) + 3ν
ρ5(ρ · u)(ρ · u2)
ϕ + (1 + θ)2
sin ϕ cos ϕ = 3(1 − ν)
ρ51
(ρ1 · u)(ρ1 · u3) + 3ν
ρ5(ρ · u)(ρ · u3)
ν ≡ reduced mass of the small primary, ε20 = (
L
ℓ)2a2, S2(αi) =
3
2(5 cos
2αi − 1)
cos α1 =ρ1
ρ1
· u, cos α2 =ρ
ρ· u
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 21/100

T
DG Rotating Tether Attitude Dynamics
The Attitude Dynamics of the tether can
be analyzed more intuitively using the
Newton-Euler formulation. The core of the
analysis is the angular momentum equa-
tion:dHG
dt= M G
HereMG is the resultant of theexternaltorques applied to the center of massG of
the tethered system andHG is the angu-
lar momentum of the system, atG, in the
motion relative to the center of mass.
u1 ≡ u
u2
u3
G
HG
m1
m2
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 22/100

T
DG Rotating Tether Attitude Dynamics
In theDumbbell Model the angular velocity of the tether and its angular momentumHG are:
~Ω = u × u + u (u · Ω ), HG = I Ω = I(u × u)
Attached to the tether we take a reference frameGu1u2u3 where the unit vectors are given by:
u1 = u, u2 =u
‖u‖, u3 = u1 × u2
In this body frame the angular momentum is:
HG = IΩ⊥u3, where Ω⊥ = ‖u × u‖ = ‖u‖
and the angular momentum equation takes the form:
dΩ⊥
dtu3 + Ω⊥
du3
dt=
1
IM G
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 23/100

T
DG Rotating Tether Attitude Dynamics
This way we obtain the following equa-
tions:
du1
dt= Ω⊥u2
du3
dt=
M2
Ω⊥Iu2
dΩ⊥
dt=
M3
I
We introduce the Tait-Bryant angles (or
Cardan angles) as generalized coordinates.
Notice that, from a mathematical point
of view, we have a four-orden system of
ODE’S. u1 ≡ u
u2
u3
G
x0
y0
z0
φ3
φ2
φ1
φ1
s
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 24/100

T
DG Rotating Tether Attitude Dynamics
In terms of the Bryant angles the unit vectorsu1 andu3 are given by
u1 = (cos φ2 cos φ3, cos φ1 sin φ3 + sin φ1 sin φ2 cos φ3, sin φ1 sin φ3 − cos φ1 sin φ2 cos φ3)
u3 = (sin φ2, − sin φ1 cos φ2, cos φ1 cos φ2)
The equations governing the time evolution of the Bryant angles are:
dφ1
dτ= − M2
ω2I · 1
Ω⊥
· cos φ3
cos φ2
dφ2
dτ= − M2
ω2I · 1
Ω⊥
· sin φ3
dφ3
dτ= Ω⊥ +
M2
ω2I · 1
Ω⊥
· cos φ3 tan φ2
dΩ⊥
dτ=
M3
ω2I
whereΩ⊥ = Ω⊥/ω is the non-dimensional form ofΩ⊥. These equations should be integrated from the
initial conditions:
at τ = 0 : φ1 = φ10, φ2 = φ20, φ3 = φ30, Ω⊥ = Ω⊥ 0
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 25/100

T
DG Fast Rotating Tether
For afast rotating tether the value ofΩ⊥ is large,Ω⊥ ≫ 1. There are two characteristic times:
1) the period of the orbital dynamics of both primaries,τ = O(1) and
2) the period of the intrinsic rotation of the tetherτ1 = Ω⊥τ = O(1)
For example, consider the governing equation
dφ
dτ= f(φ1, φ2, φ3, Ω⊥)
Its averaged equations form is:
<dφ
dτ>=
1
2π
∫ 2π
0f(φ1, φ2, φ3, Ω⊥)dτ1
To integrate the functionf(φ1, φ2, φ3, Ω⊥) theslow
variables(φ1, φ2, Ω⊥) take constant values and the
fast variableφ3 is approximated byφ3 ≈ τ1 + φ30.
u1 ≡ u
u2
v1v2
u3 ≡ v3
Gφ3
φ3
Stroboscopic frame
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 26/100

T
DG Averaged equations for an inert fast rotating tether
x − 2y − (1 − ν)(1 −1 + x
ρ31
) − x(1 −ν
ρ3) =
ǫ20
2
ν − 1
ρ51
[
3(sin φ2 + n) sin φ2 − (1 + x)S2(n1
ρ1
)
]
−ν
ρ5
[
3n sin φ2 − xS2(n
ρ)
]
y + 2x + y(1 − ν)
ρ31
− y(1 −ν
ρ3) =
ǫ20
2
1 − ν
ρ51
[
3(sin φ2 + n) cos φ2 sin φ1 + yS2(n1
ρ1
)
]
+ν
ρ5
[
3n cos φ2 sin φ1 + yS2(n
ρ)
]
z + zν
ρ3+ z
(1 − ν)
ρ31
=ǫ20
2
ν − 1
ρ51
[
3(sin φ2 + n) cos φ2 cos φ1 − zS2(n1
ρ1
)
]
−ν
ρ5
[
3n cos φ2 cos φ1 − zS2(n
ρ)
]
dφ1
dτ=
(
1 +cos φ1 cos φ2
2Ω⊥
)
sin φ2 cos φ1
cos φ2
+3
2
(1 − ν)
Ω⊥
(sin φ2 + n)(cos φ2 + b)
ρ51 cos φ2
+3
2
ν
Ω⊥
n b
ρ5 cos φ2
dφ2
dτ= −
(
1 +cos φ1 cos φ2
2Ω⊥
)
sin φ1 + (y cos φ1 + z sin φ1)
3
2
(1 − ν)
Ω⊥
(sin φ2 + n)
ρ51
+3
2
ν
Ω⊥
n
ρ5
dΩ⊥
dτ= sin φ1 sin φ2 cos φ1
where the quantities(n, b) and the fast variableφ3 are given by
n = x sin φ2 − (y sin φ1 − z cos φ1) cos φ2
b = x cos φ2 + (y sin φ1 − z cos φ1) sin φ2
dφ3
dτ= Ω⊥ −
(
1 +cos φ1 cos φ2
2Ω⊥
)
sin2 φ2 cos φ1
cos φ2
−3
2
(1 − ν)
Ω⊥
(sin φ2 + n)(cos φ2 + b)
ρ51
tan φ2 −3
2
ν
Ω⊥
n b
ρ5tan φ2
Remember: for a FRT the non-dimensional variableΩ⊥ is a large number, that is,Ω⊥ ≫ 1.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 27/100

T
DG The Hill approach for fast rotating tethers
• Frequently, the parameterν is small. The Hill approximation give us the right order of
magnitude of distance to the small primary. We introduce this approximation by means of the
change of variables:
x = ℓ ν1/3 ξ, y = ℓ ν1/3 η, z = ℓ ν1/3 ζ, ρ = ℓ ν1/3 ρ
• For a FRT the parameterΩ⊥ is large (Ω⊥ ≫ 1). For example, taking Jupiter and Io as
primaries,Tp ≈ 1.769 days. IfTFRT ≈ 25 minutes thenΩ⊥ > 100. It is reasonable to take
the limit Ω⊥ → ∞ in the governing equations.
• The tether’s characteristic length,λ =a2
2
(
L
ν1/3 ℓ
)2
appears in a natural way in the
problem (hereν = µ/(µ1 + µ) is the reduced mass of the small primary or central body).
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 28/100

T
DG The Hill approach for fast rotating tethers
ξ − 2η = (3 − 1
ρ3)ξ − λ
ρ5
3N sin φ2 − ξS2(N
ρ)
η + 2ξ = − η
ρ3+
λ
ρ5
3N cos φ2 sin φ1 + ηS2(N
ρ)
ζ = −ζ(1 +1
ρ3) − λ
ρ5
3N cos φ2 cos φ1 − ζS2(N
ρ)
dφ1
dτ= cos φ1 tan φ2
dφ2
dτ= − sin φ1
N = ξ sin φ2 − (η sin φ1 − ζ cos φ1) cos φ2
These equations should be integrated from the initial conditions:
at τ = 0 : ξ = ξ0, η = η0, ζ = ζ0, ξ = ξ0, η = η0, ζ = ζ0, φ1 = φ10, φ2 = φ20
If the initial conditions areφ10 = φ20 = 0 ⇒ φ1(τ) = φ2(τ) ≡ 0.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 29/100

T
DG The Hill approach for fast rotating tethers
TETHER ROTATION PARALLEL TO THE PRIMARIES PLANE :
ξ′′ − 2 η′ = 3 ξ − ξ
ρ3− 3
2λ
ξ
ρ5
(
1 − 5ζ2
ρ2
)
η′′ + 2 ξ′ = − η
ρ3− 3
2λ
η
ρ5
(
1 − 5ζ2
ρ2
)
ζ′′ = −ζ − ζ
ρ3− 3
2λ
ζ
ρ5
(
3 − 5ζ2
ρ2
)
Formally equal to a Hill-J2 problem:
• J2 helps to stabilize high inclination orbits
• we have control overL and, therefore, overλ!
• λ might take “high” values with feasible tether lengths• λ = 0.01 ⇒ Metis: L ≈ 7.2 km (R⊕ ≈ 50 km)• . . . when consistent with ourO(L/r)3 approximation
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 30/100

T
DG Hill+oblateness long-term dynamics
• Studied since the dawn of the space era (Lidov, Kozai)
• β: ratioJ2 to third body perturbations (β2 ∝ a−5)
0.0 0.5 1.0 1.5 2.0 2.5 3.090
100
110
120
130
140
β
I(deg)

T
DG ARIADNA PROGRAM
The END of thisGentil Introduction
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 32/100

T
DG ARIADNA PROGRAM
Inert Tethersand Periodic Motions
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 33/100
T
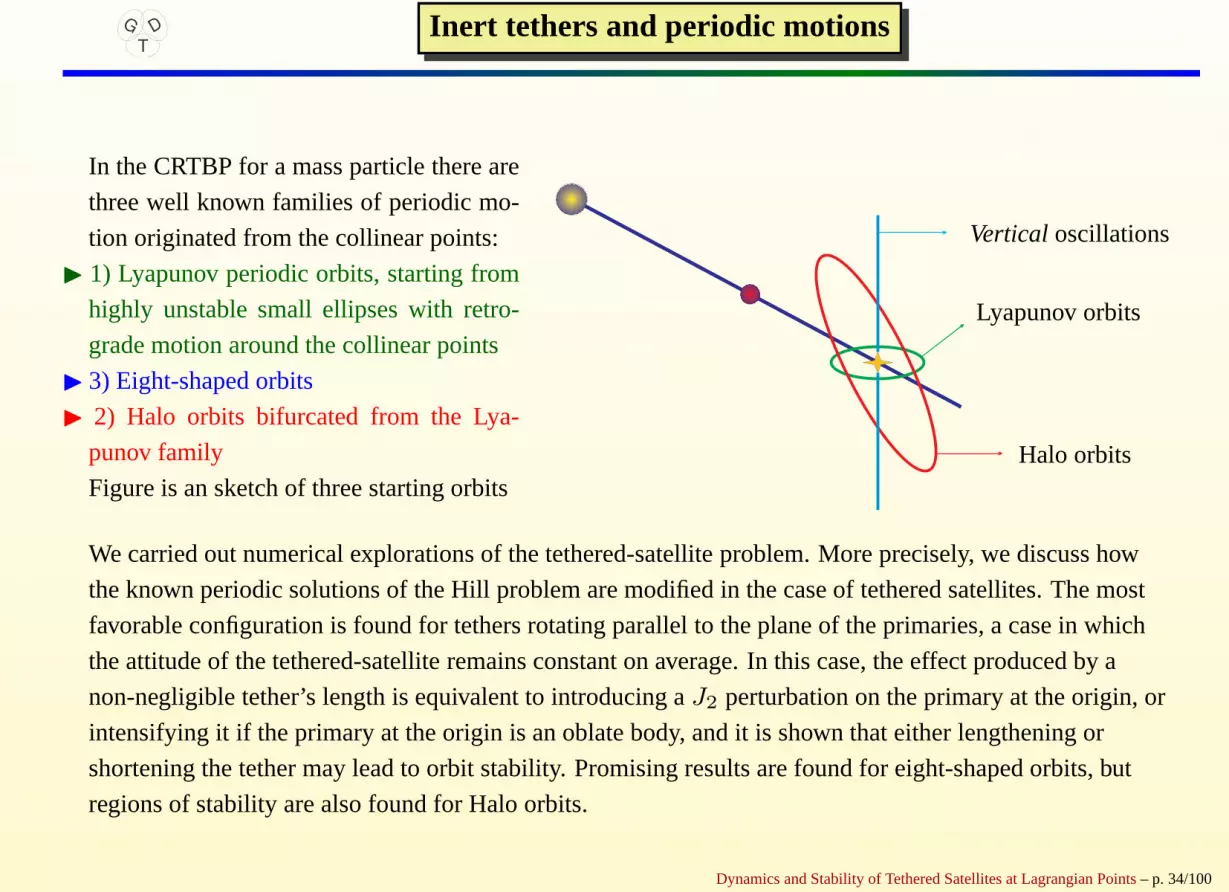
DG Inert tethers and periodic motions
In the CRTBP for a mass particle there are
three well known families of periodic mo-
tion originated from the collinear points:
1) Lyapunov periodic orbits, starting from
highly unstable small ellipses with retro-
grade motion around the collinear points
3) Eight-shaped orbits
2) Halo orbits bifurcated from the Lya-
punov family
Figure is an sketch of three starting orbits
Vertical oscillations
Halo orbits
Lyapunov orbits
We carried out numerical explorations of the tethered-satellite problem. More precisely, we discuss how
the known periodic solutions of the Hill problem are modifiedin the case of tethered satellites. The most
favorable configuration is found for tethers rotating parallel to the plane of the primaries, a case in which
the attitude of the tethered-satellite remains constant onaverage. In this case, the effect produced by a
non-negligible tether’s length is equivalent to introducing aJ2 perturbation on the primary at the origin, or
intensifying it if the primary at the origin is an oblate body, and it is shown that either lengthening or
shortening the tether may lead to orbit stability. Promising results are found for eight-shaped orbits, but
regions of stability are also found for Halo orbits.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 34/100

T
DG Summary
• Lyapunov orbits:there is no beneficial effects on orbit stability by using tethered satellites
• Eight-shaped orbits:the presence of the tether in general, reduces instability.Stability
regions are found for certain lengths of the tether when the Jacobi constant remains below
roughlyC = 3.
• Halo orbits:stability regions for the tethered satellites are generally found, even when
starting from highly unstable orbits of the Hill problem. The general effect of lengthening the
tether is to narrow and twist the Halo, sometimes convertingthe Halo in a thin, eight-shaped
orbit. However, depending on the Jacobi constant value of the starting Halo orbit, the required
length of the tether to stabilize the orbit may be small and the stabilized orbit may retain most
of the Haloing characteristics.
Two different motivations to use a tether: 1) to stabilize unstable Halo orbits and 2) to take
advantage of the tether; it enjoys the stability propertiesof some stable Halo orbits (for values
of C close to the lower limit).
Therefore,at first sight, the most promising regions are close to the Halo family’s stabilityregion of the Hill problem , where tethers of few tenths of kilometers may stabilize Halo
orbits of the simplified model. For specific applications oneneeds to check that the tether
length required for stabilization is feasible, say of few tenths of km, and that the corresponding
Halo orbit does not impact the central body. Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 35/100

T
DG Summary
k1 stability curve
k2 stability curve
Minimum distance curve
Maximum distance curve
1.5 2.0 2.5 3.0 3.5 4.0-4
0
4
28
215
1622
0.01
0.2
0.39
0.58
0.78
0.97
Jacobi constant
Sta
bilit
yin
dice
s
Dis
tanc
eHH
illun
itsL
k1 stability curve
k2 stability curve
Jupiter
The Moon
Europa
IoEnceladus
Deimos
Phobos
0.0 0.1 0.2 0.3 0.4 0.5
-4
0
4
28
215
1622
Minimum radiusHHill problem unitsL
Sta
bilit
yin
dice
s
• Left: Stability diagram of the Halo family of the Hill problem (no tether) showing the
maximum and minimum distance to the origin.
Right: Stability diagram of the Halo family of the Hill problem (no tether) as a function of the
minimum distance to the origin.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 36/100

T
DG Summary
k1 stability curve
k2 stability curve
Eros
MercuryThe Moon
EuropaIo
Enceladus
0.00 0.05 0.10 0.15 0.20-4
-2
0
2
4
Minimum radiusHHill problem unitsL
Sta
bilit
yin
dice
s
Right: Stability diagram of the Halo family of the Hill problem (no tether) as a function of the
minimum distance to the origin.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 37/100

T
DG Summary
0.0
0.2
0.4
-0.4
-0.2
0.0
0.2
0.4
-0.5
0.0
0.00.1
0.2
0.3
0.4
-0.4
-0.2
0.0
0.2
0.4
-0.5
0.0
• Left: Halo orbit close to Io, stabilized with a tether lengthof ∼ 70 km. The minimum
distance to Io is about one half of it radius.
Right: Halo orbit about Eros, stabilized with a tether length of ∼ 110 km.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 38/100
T
DG ARIADNA PROGRAM
The END of Inert Tethersand Periodic Motions
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 39/100

T
DG ARIADNA PROGRAM
Io Exploration
with Electrodynamic Tethers
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 40/100

T
DG POWER AND M ASSES OF SOMERTG’ S
Mission Thermal W Electrical W Mass (kg)
Pionner 10 2250 150 54.4
Voyager 1 y 2 7200 470 117
Ulysses 4400 290 55.5
Galileo 8800 570 111
Cassini 13200 800 168
PROBLEMS OF THE RTG’ S
• Very high cost: from $40,000 to$400,000 per W
• High potential risk
• Limited power (mass grows strongly)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 41/100

T
DG DEORBITING SATELLITES WITH ELECTRODYNAMIC TETHERS
ANY SATELLITE CAN BE DEORBITED WITH AN ELECTRODYNAMIC TETHERWORKING IN THE
GENERATOR REGIME
∆h = ai − af
∆h
~vi
~vf
~fe
~fe
Deorbiting a satellite
The mechanical energy lost in the deorbiting process is
∆E =mµ
2afai∆h ≈ mµ
2a2f
∆h(1 − ∆h
af)
and it is invested in several task. Basically:
• to attract the electrons from the infinity to the
tether
• ohmics loss in the tether when the current is
flowing
• some useful work that we can obtain in the form of
electrical energy (charging batteries, for example)
We need:magnetic fieldandplasma environment. Both are
present in Jupiter.
THE ELECTRODYNAMIC TETHER IS ABLE TO RECOVER A SIGNIFICANT FR ACTION OF THE
MECHANICAL ENERGY LOST DURING THE DEORBITING PROCESS
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 42/100

T
DG SCENE OF THE MISSION
Jupiter inner moonlets
rAdrastea = 128971 km, rMetis = 127969 km
rAmalthea = 181300 km, rThebe = 221895 km
The plasma environment is co-rotating
with Jupiter (as a rigid body); the an-
gular velocity is
ωJ ≈ 1.7579956104 × 10−4s−1
The orbital velocity in a circular or-
bit of radius r is vc =
√
µ
r(µ =
1.26686536 × 1017m3/s2). It exists
an orbital radius for which the orbital
period coincides with the sideral pe-
riod of Jupiter (about 9.925 hours); it
is the stationary radius (rs) given by
rs = (T√
µ
2π)23 ≈ 160009.4329 km
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 43/100

T
DG FUNDAMENTALS OF THE MISSION
~vo
~f e
~f e
− ~f e
Amalthea:m = 2.09 × 1018 kg, af = 181300 km
The cable can be removed by using the gravitational
attraction of Amalthea to link the tether system and
the small Jupiter moon. The tether system moves
in an equilibrium position relative to the primaries:
Jupiter + Amalthea
We tray to deorbit one of the Jupiter moon-
lets. We joint the tether and the moonlet
with a cable. ~F e is the electrodynamic
drag acting on the tether. This force is trans-
mitted thought the cable to the small Jupiter
moon that will be deorbited.
∆h =2∆Ea2
f
mµ
To deorbit Amaltea 1mm (∆h = 1mm) im-
plies a loss of mechanical energy about
∆E ≈ 4 × 1015J≈ 1.1 × 109Kwh
From a practical point of view the reserve of
energy is unbounded
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 44/100

T
DG Equilibrium Positions at the Synodic Frame
JIoL1
L2
Thrust
Io atraction
• A permanent tethered observatory at Jupiter. Dynamical analysis, by J. Pelaez and D. J. Scheeres, Proceedings of the
17th AAS/AIAA Space Flight Mechanics Meeting Sedona, Arizona, Vol. 127 of Advances in the Astronautical Sciences,
2007, pp. 1307–1330
• On the control of a permanent tethered observatory at Jupiter, by J. Pelaez and D. J. Scheeres, Paper AAS07-369 of
the 2007 AAS/AIAA Astrodynamics Specialist Conference, Mackinac Island, Michigan, August 19-23, 2007
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 45/100

T
DG EQUILIBRIUM POSITIONS
0
0.2
0.4
0.6
0.8
1
1.2
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
χ =(
34
) 23
χmax χmax
ξe
ζe
ROOT 1ROOT 2
L1L2
χ = 0 χ = 0
Equilibrium Positions on the plane(ξe, ζe)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 46/100

T
DG EQUILIBRIUM POSITIONS (AMALTEA )
0
0.2
0.4
0.6
0.8
1
1.2
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
χ = 0 χ = 0
χmax χmax
χ =(
34
) 23
ξe
ζe
ROOT 1ROOT 2
L2L1
In [1]
Comparison with the results summarized in[1]
[1] A permanent tethered observatory at Jupiter. Dynamical analysis, by J. PELÁEZ & D. J. SCHEERES,
(Paper AAS07-190) ofThe 2007 AAS/AIAA Space Flight Mechanics Meeting, Sedona, AZ, January 2007.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 47/100

T
DG TETHER DESIGN IN M ETIS . NUMERICAL ANALYSIS
0.1
1
10
10 100
mT (in kg)
Wu (kw)
L = ctedw = cte
L = 50 km
L = 5 km
dw = 50 mm
dw = 5 mm
35 49 76 140
10 km
20 km
30 km
40 km
DIFFERENT OPTIMUM CONFIGURATIONS AT METIS ( h = 0.1 MM )
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 48/100

T
DG TETHER DESIGN IN M ETIS . THEORETICAL ANALYSIS
0.1
1
10
10 100
mT (in kg)
Wu (kw)
L = ctedw = cte
L = 50 km
L = 5 km
dw = 50 mm
dw = 5 mm
35 49 76 140
10 km
20 km
30 km
40 km
DIFFERENT OPTIMUM CONFIGURATIONS AT METIS ( h = 0.1 MM )
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 49/100

T
DG TETHER DESIGN IN I O. NUMERICAL ANALYSIS
0.1
1
10
10 100 200 300
2
3
4
170
mT (kg)
Wu (kw)
L = ctedw = cte
L = 8 km
L = 10 km
L = 15 km
L = 25 km
L = 35 km
dw = 50 mmdw = 5 mm
dw = 10 mm
dw = 36 mm
DIFFERENT OPTIMIZED CONFIGURATIONS IN I O (h = 0.05 MM )
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 50/100

T
DG THREE DIFFERENT CONFIGURATION
A B C
L (km) 25 35 35
dw (mm) 50 25 36
mT (kg) 169 117 170
ZC (Oh) 640 1265 886
Wu (w) 2100 2100 3000
Isc (A) 10.94 5.53 7.89
Iav (A) 1.43 1.04 1.49
φ∗ (deg) 39.7 40.06 40.06
χ · 103 5.79 5.91 8.43
de (km) 200,052 198,119 165,803
T (mN) 5.28 7.4 7.4
Three possible designs
• Aluminum tape 0.05 mm thick
• Self-balanced
• Mass of the S/C 500 kg
• Tether mass≤ 170 kg
• χ ∈ [0, 0.115] STABLE
• Power from 2 – 3 kw
• distancede large
• Tether tension small≈ mN
• Appropriate for the scientific explo-
ration of the Io plasma torus
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 51/100

T
DG ROTATING ELECTRODYNAMIC TETHER ORBITING I O
Toward Jupiter
Eπ
ϕ
vIo
B x
y
z
ω t
O
We take an inertial frameOxyz (origin Io)
Orbital velocity of Io:vIo ≈ 17.33 km/s
Plasma velocity at Io orbit≈ 74.17 km/s
Orbital velocity of S/C (around Io)≈ 1 km/s
Magnetic fieldB ≈ 2 · 10−6 T
E ≈ (vIo − vpl) × B
E = Eπ(cos ωt, sin ωt, 0),
Eπ ≈ 0.12 V/m
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 52/100

T
DG POWER GENERATION I O
A C
II
hB
IC
A C
V
Vp
Vt
EM
L
CH
I
hB
EE
ZT
II
Power generation: assumptions
• small values ofn∞ no Ohmic effects
• negligible ion losses at the cathodic segment
• control impedanceZC at the cathodic end
• OML regime
• control parameterζ =z∗
L= 1 −
ZC IC
EmL
Results of the analysis
• Iav = 1L
∫ L
0I(z)dz = I0 (1 − 2
5ζ)ζ3/2
• W = ZCI2C = I0EmL(1 − ζ)ζ3/2
I0 =4dw
3πen∞
√
2eEmL3
me
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 53/100

T
DG OPTIMUM POWER GENERATION
0
0.05
0.1
0.15
0.2
0 0.2 0.4 0.6 0.8 1
ζ
WI0EmL
ζopt =3
5, Zopt
C =3π
√2
8· 1 − ζopt
ζ3/2opt
· 1
dwn∞
√
meEm
e3L=
π√
30
12· 1
dwn∞
√
meEm
e3L
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 54/100

T
DG ROTATING ELECTRODYNAMIC TETHER ORBITING I O
Wav =1
π
∫ π/2
−π/2cos3/2 ϕ dϕ · 4dw
3πn∞
√
2E3πL5e3
me
[
(1 − ζ) ζ3/2]
0 10 20 30 40 50 600
2
4
6
8
10
12
14
P (kw)
Tether length (km)
First order approximation of averaged generated power
for a 5 cm wide tape tether of different lengths in Io
orbit.
Power generated with a 25 km long 5 cm wide tape
tether along circular retrograde orbits of different radii:
r = 1.1 rIo (grey solid line),r = 2.0 rIo (dark
solid line), andr = 3.0 rIo (dark dotted line).
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 55/100

T
DG POWER GENERATION IN I ONIAN ORBIT
0.1
1
10
10 100 200 300
2
3
4
170
L=8
L=10
L=15
d=50d=5
d=10
L=25
L=35
d=36
mT (kg)
Wu (kw)
L = ctedw = cte
DIFFERENT OPTIMIZED CONFIGURATIONS IN I O (h = 0.05 MM )
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 56/100

T
DG ORBIT STABILITY
• Io is the Galilean moon more affected by the gravitation of Jupiter
• Lara & Russela shows thatretrograde equatorial orbits around Europe are stable when eccentricity and
semimajor axis are smaller than critical values.
• Their results have been numerically extended to Io: if the apocenter is less than 3.5rIo the equatorial
retrograde orbit is stable for at least a year
Fav =1
π
∫ π/2
−π/2L Iav (u× B)dϕ =
1
πL
[
∫ π/2
−π/2Iav udϕ
]
× B
When the load impedance is controlled for maximum power generationζ =cte:∫ π/2
−π/2Iav udϕ =
1
Eπ
∫ π/2
−π/2Iav cos ϕEπ dϕ =
Eπ
Eπ·∫ π/2
−π/2Iav cos ϕ dϕ
This way we have
Fav =k′
√Eπ
(Eπ × B), k′ ≈ 0.0667 dwn∞
√
L5e3
me(5 − 2ζ)ζ3/2
The averaged force has a constant value, in a first approximation, on the synodic frame.
aOn the design of a science orbit about Europa, Paper AAS 06-168, 16th AAS/AIAA Space Flight Mechanics Conference. Tampa, Florida,USA, January 2006
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 57/100

T
DG ORBIT STABILITY
F ≈ F (− sin ω t, cos ω t, 0) with F = 0.0667 dwn∞B
√
EπL5e3
me· (5 − 2ζ) ζ3/2
0 5 10 15 20 25 301
1.5
2
2.5
3
3.5
rrIo
time (days)
Evolution of orbital radius for circular retrograde orbitsof different radii (1.2, 2.0, 2.5 and 3 Io radii) under
the effect of the Lorentz force of a 25 km long 5 cm wide tape tether with power-optimized impedance
control.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 58/100

T
DG ORBIT CONTROL
Eπ
F ∝ Eπ × B
IovIO
Drag arc
Thrust arc
Schematic of electrodynamic thrust and drag arc
for a generic Ionian orbit. We neglect the orbital
velocity around Io in the determination of mo-
tional electric field
The main contribution to the motional electric
field comes from Io orbital velocity rather than
the spacecraft orbital velocity around Io. The
Lorentz force is thrusting the S/C in part of the
orbit (thrust arc) and braking it (drag arc) in the
rest of the Ionian orbit.
Preliminary test with a simple control strategy:
the control parameterζ is switched to 1 (maxi-
mum Lorentz force) on thrust arcs and switched
to 0 (no force) on drag arcs. A numerical sim-
ulation has been conducted assuming a 500 kg
spacecraft equipped with a 25 km long and
5 cm wide electrodynamic tether starting from
a low altitude retrograde circular orbit (r = 1.2
Io radii).
B⊗
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 59/100

T
DG ORBIT CONTROL
−6 −4 −2 0 2 4 6−6
−4
−2
0
2
4
6
xrIo
yrIo
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 1500
1
2
3
4
5
6
7
8
9
10
rrIo
time (days)
Spiral-out trajectory (left) and orbital radius evolution(right) for a 500 kg spacecraft propelled by a
25 km long 5 cm wide tape tether with simple current control strategy. Escape from Io gravitational field
require less than 5 months, in this case.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 60/100

T
DG ARIADNA PROGRAM
The END of Io Exploration
with Electrodynamic Tethers
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 61/100

T
DG ARIADNA PROGRAM
Stability of tethered satellites
at collinear lagrangian points
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 62/100

T
DG PREVIOUS ANALYSIS
• The Stabilization of an Artificial Satellite at the InferiorConjunction Point of the Earth-Moon System,
G. Colombo, Smithsonian Astrophysical Observatory Special Report No.80, November 1961
• The Control and Use of Libration-Point Satellites, R. W. Farquhar , NASA TR R-346, September 1970.
pp. 89-102
• Tether Stabilization at a Collinear Libration Point, R. W. Farquhar , The Journal of the Astronautical
Sciences, Vol. 49, No. 1, January-March 2001, pp. 91-106.
• Dynamics of a Tethered System near the Earth-Moon Lagrangian Points, A. K. Misra, J. Bellerose, andV. J. Modi , Proceedings of the 2001 AAS/AIAA Astrodynamics SpecialistConference, Quebec City,
Canada, Vol. 109 of Advances in the Astronautical Sciences,2002, pp. 415–435.
• Dynamics of a multi-tethered system near the Sun-Earth Lagrangian point, B. Wong and A. K. Misra,
13th AAS/AIAA Space Flight Mechanics Meeting, Ponce, Puerto Rico, February 2003, Paper No.
AAS-03-218.
• Dynamics of a Libration Point Multi-Tethered System, B. Wong and A. K. Misra, Proceedings of 2004
International Astronautical Congress, Paper No. IAC-04-A.5.09.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 63/100

T
DG EQUILIBRIUM POSITIONS AT THE SYNODIC FRAME
L1 L2L3
L4
L5
E1 E2
Equilibrium position
with an inert tether
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 64/100
T
DG EXTENDED DUMBBELL M ODEL . H ILL APPROACH
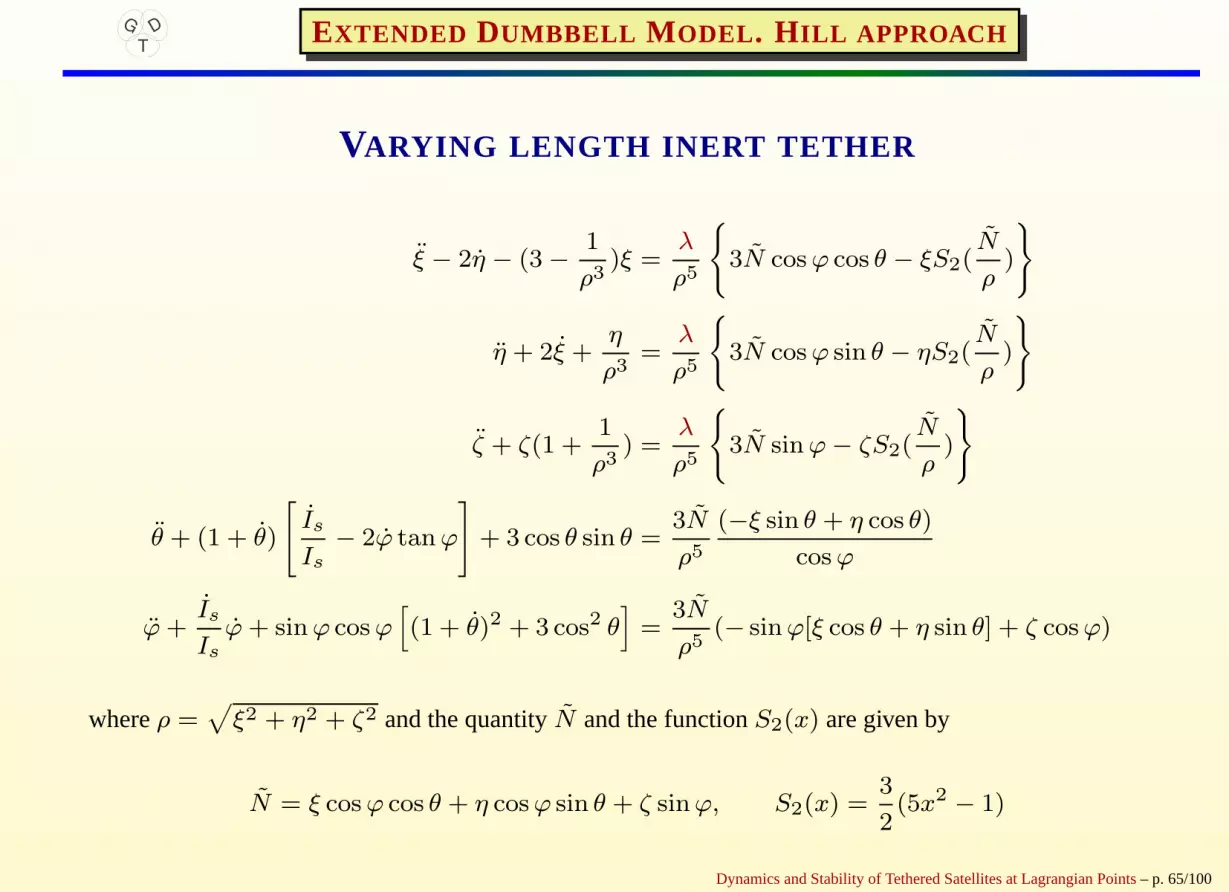
VARYING LENGTH INERT TETHER
ξ − 2η − (3 − 1
ρ3)ξ =
λ
ρ5
3N cos ϕ cos θ − ξS2(N
ρ)
η + 2ξ +η
ρ3=
λ
ρ5
3N cos ϕ sin θ − ηS2(N
ρ)
ζ + ζ(1 +1
ρ3) =
λ
ρ5
3N sin ϕ − ζS2(N
ρ)
θ + (1 + θ)
[
Is
Is− 2ϕ tan ϕ
]
+ 3 cos θ sin θ =3N
ρ5
(−ξ sin θ + η cos θ)
cos ϕ
ϕ +Is
Isϕ + sin ϕ cos ϕ
[
(1 + θ)2 + 3 cos2 θ]
=3N
ρ5(− sin ϕ[ξ cos θ + η sin θ] + ζ cos ϕ)
whereρ =√
ξ2 + η2 + ζ2 and the quantityN and the functionS2(x) are given by
N = ξ cos ϕ cos θ + η cos ϕ sin θ + ζ sin ϕ, S2(x) =3
2(5x2 − 1)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 65/100

T
DG EXTENDED DUMBBELL M ODEL . H ILL APPROACH
λ =
[
Ld
ℓ
]2
· a2
ν2/3, a2 =
Is
m L2d
∈ [1
12,1
4]
where,ℓ is the distance between primaries,ν is the reduced mass of the small primary (usuallyν ≪ 1),
m = m1 + m2 + mT is the total mass of the system andIs is the moment of inertia about a line normal
to the tether by the center of massG of the system;a2 is of order unity and takes its maximum value
a2 = 1/4 for a massless tether with equal end masses (m1 = m2). For a tether of varying length the
parameterλ is a function of time since the deployed tether massmd and the deployed tether lengthLd(t)
are changing. Moreover, some terms of these governing equations involve the ratio:
Is
Is= 2
Ld
LdJg, Jg = 1 − Λd (1 + 3 cos 2φ)
(
3 sin2 2φ − 2Λd
) , Λd =md
m, cos2 φ =
(
m1
m+
Λd
2
)
This formulation includes the mass of the tether through theparameterΛd and the mass angleφ. In order
to neglect the tether mass, we only have to introduce the condition Λd = 0 in the above expressions. For a
tether of constant length the parameterλ is also constant and the quotientIs/Is vanishes, that is,
Is/Is = 0. For the sake of simplicity we will assume a massless tether in what follows.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 66/100
T
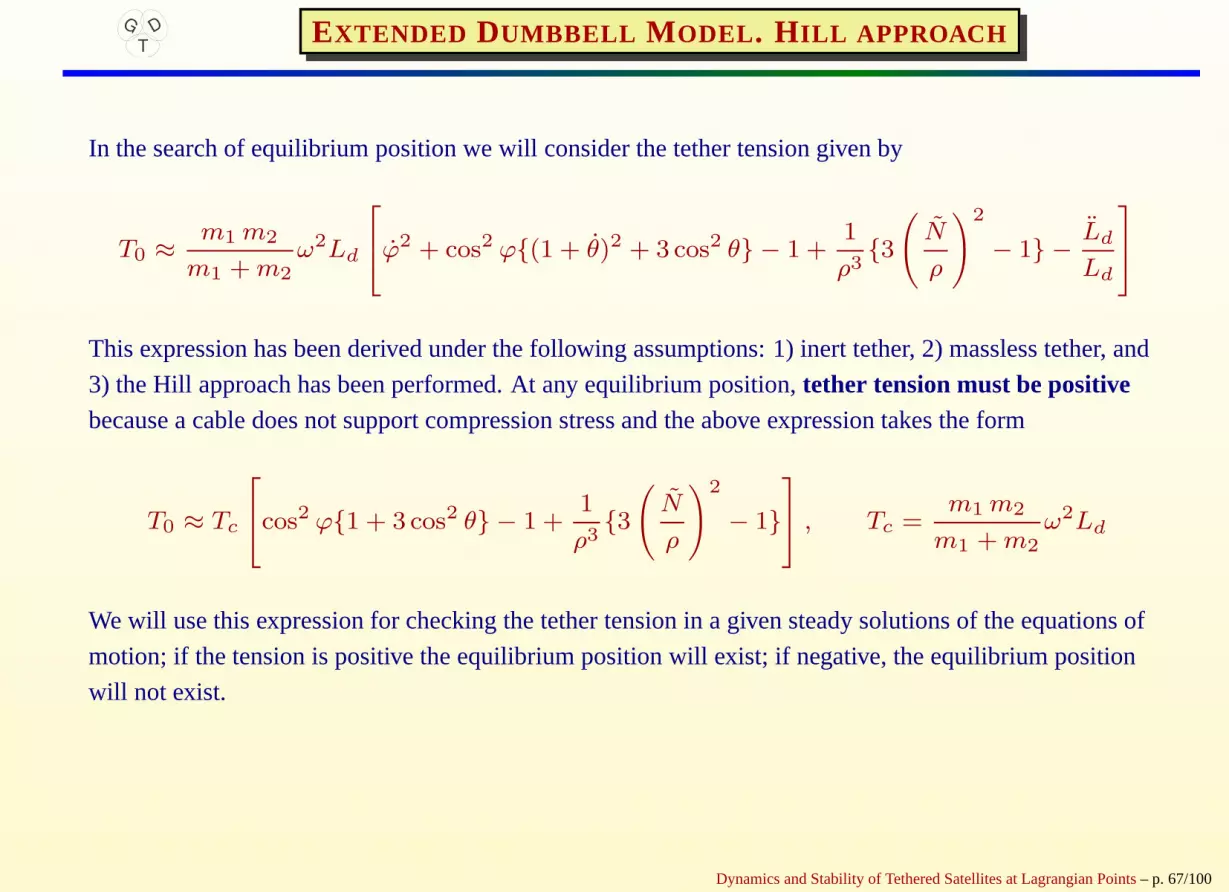
DG EXTENDED DUMBBELL M ODEL . H ILL APPROACH
In the search of equilibrium position we will consider the tether tension given by
T0 ≈ m1 m2
m1 + m2ω2Ld
ϕ2 + cos2 ϕ(1 + θ)2 + 3 cos2 θ − 1 +1
ρ33(
N
ρ
)2
− 1 − Ld
Ld
This expression has been derived under the following assumptions: 1) inert tether, 2) massless tether, and
3) the Hill approach has been performed. At any equilibrium position,tether tension must be positivebecause a cable does not support compression stress and the above expression takes the form
T0 ≈ Tc
cos2 ϕ1 + 3 cos2 θ − 1 +1
ρ33(
N
ρ
)2
− 1
, Tc =m1 m2
m1 + m2ω2Ld
We will use this expression for checking the tether tension in a given steady solutions of the equations of
motion; if the tension is positive the equilibrium positionwill exist; if negative, the equilibrium position
will not exist.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 67/100

T
DG VALUES OF λ FOR SUN AND DIFFERENT PLANETS
1e-016
1e-014
1e-012
1e-010
1e-008
1e-006
0.0001
0 1000 2000 3000 4000 5000
MercuryVenusEarthMarsJupiterSaturnUranusNeptune
Tether length (km)
λ
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 68/100

T
DG VALUES OF λ FOR BINARY SYSTEMS IN THE SOLAR SYSTEM
1e-014
1e-012
1e-010
1e-008
1e-006
0.0001
0.01
1
100
10000
0 200 400 600 800 1000
Earth-Moon
Mars-PhobosMars-DeimosSaturn-MimasSaturn-EnceladusSaturn-RheaSaturn-Titan
Neptun-Triton
Tether length (km)
λ
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 69/100

T
DG VALUES OF λ FOR BINARY SYSTEMS IN THE JOVIAN WORLD
1e-014
1e-012
1e-010
1e-008
1e-006
0.0001
0.01
1
100
0 20 40 60 80 100
λ
MetisAdrasteaAmaltheaThebeIoEuropaGanymedeCallisto

T
DG NON ROT. TETHERS. CONST. L ENGTH . EQUILIBRIUM POSITIONS
Small Primary
L2 E2
Center of massG
Sketch of the equilibrium positionE2 in the neighborhood ofL2.
There is another one, similar to this,on the leftof L1.
ξe = ±ρe, ηe = ζe = ϕe = 0, θe = 0, π, λ =ρ2
e
3
(
3 ρ3e − 1
)
, ρ3e > 1/3
This expression can be expanded whenλ ≪ 1 is small and provide the asymptotic solution
ξe ≈ (1
3)13 + 3
13 λ − 9 λ2 +O(λ3)
The convergence of this serie is poor but, for really small values ofλ the two first terms give a useful
approximation.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 71/100

T
DG NON ROT. TETHERS. CONST. L ENGTH . STABILITY ANALYSIS
A linear stability analysis shows that the equilibrium positions of that family are unstable for
any value ofλ.
10−6
10−4
10−2
2.5
2.55
2.6
2.65
2.7
2.75
2.8
2.85
R(s5)
λReal part of the unstable eigenvalue as a function ofλ
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 72/100
T
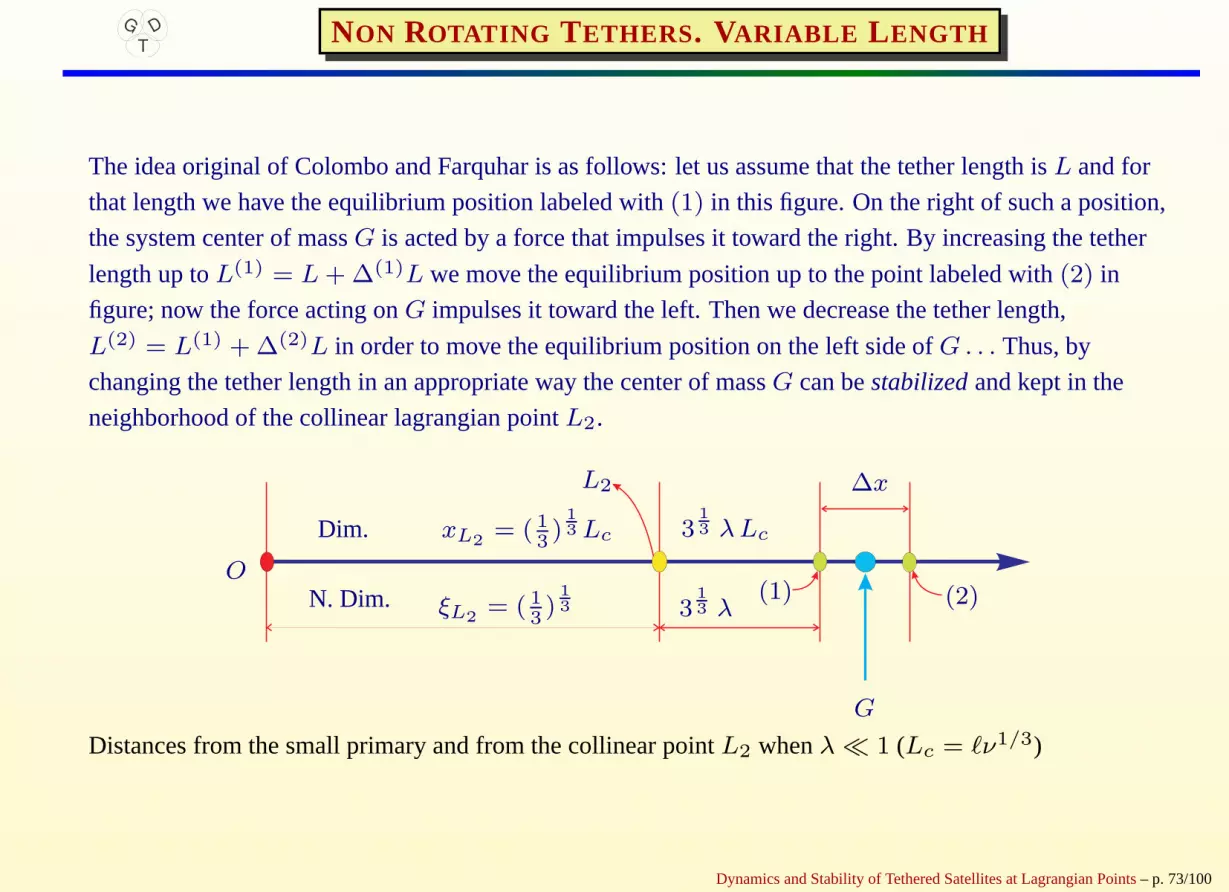
DG NON ROTATING TETHERS. VARIABLE L ENGTH
The idea original of Colombo and Farquhar is as follows: let us assume that the tether length isL and for
that length we have the equilibrium position labeled with(1) in this figure. On the right of such a position,
the system center of massG is acted by a force that impulses it toward the right. By increasing the tether
length up toL(1) = L + ∆(1)L we move the equilibrium position up to the point labeled with(2) in
figure; now the force acting onG impulses it toward the left. Then we decrease the tether length,
L(2) = L(1) + ∆(2)L in order to move the equilibrium position on the left side ofG . . . Thus, by
changing the tether length in an appropriate way the center of massG can bestabilizedand kept in the
neighborhood of the collinear lagrangian pointL2.
Dim.
N. Dim. ξL2 = ( 13)13
xL2 = ( 13)13 Lc
313 λ
313 λ Lc
∆xL2
(1) (2)O
G
Distances from the small primary and from the collinear point L2 whenλ ≪ 1 (Lc = ℓν1/3)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 73/100

T
DG NON ROTATING TETHERS. VARIABLE L ENGTH
We carried out two different analysis:
• Linear approximation for small values ofλ
• Full problem. Proportional control
We finish the analysis of non rotating tethers pointing to some drawbacks associated with this
kind of control
• Control drawbacks
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 74/100

T
DG L INEAR APPROXIMATION FOR SMALL VALUES OF λ
ξ = ξL + 31/3 λ0(1 + u(τ)) , η = 31/3 λ0 v(τ) , λ = λ0(1 + s(τ))
d2 u
d τ2− 2
d v
d τ− 9 u(τ) +
9
2
(
3 cos2 θ cos2 ϕ − 1)
s(τ) +27
2
(
cos2 θ cos2 ϕ − 1)
= 0
d2 v
d τ2+ 2
d u
d τ+ 3 v(τ) − 9 cos2 ϕ cos θ sin θ (1 + s(τ)) = 0
d2 w
d τ2+ 4 w(τ) − 9 cos ϕ cos θ sin ϕ (1 + s(τ)) = 0
(1 + s(τ))d2 θ
d τ2+
d s
d τ(1 +
d θ
d τ) − 2 tan ϕ
d ϕ
d τ
(
1 +d θ
d τ
) (
1 +d s
d τ
)
+ 12 cos θ sin θ (1 + s(τ)) = 0
(1 + s(τ))d2 ϕ
d τ2+
d s
d τ
d ϕ
d τ+ (1 + s(τ)) sin ϕ cos ϕ
[
(
1 +d θ
d τ
)2
+ 12 cos2 θ
]
= 0
s(τ) = e−β τ (A cosΩτ + B sinΩτ)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 75/100

T
DG ONE DIMENSIONAL MOTION
3.6
3.8
4
4.2
4.4
4.6
4.8
5
5.2
0 200 400 600 800 1000
t (hours)
x(km)
940
960
980
1000
1020
1040
1060
1080
1100
1120
1140
1160
0 200 400 600 800 1000
t (hours)
x(km)
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 200 400 600 800 1000
t (hours)
L(m/s)
0.0145
0.015
0.0155
0.016
0.0165
0.017
0.0175
0.018
0.0185
0.019
0 200 400 600 800 1000
t (hours)
T (N)
Massless tether with two equal masses (500 kg) at both ends inthe Earth-Moon system. The selected parameters are
β = 0.5, Ω = 1.5, for the initial conditionsu0 = 0.15 andu0 = 0. The nominal tether length isL = 1000 km
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 76/100

T
DG BI -DIMENSIONAL MOTION
3
3.2
3.4
3.6
3.8
4
4.2
4.4
4.6
4.8
5
5.2
0 100 200 300 400 500 600 700 800 900 1000
t (hours)
x(km)
940
960
980
1000
1020
1040
1060
1080
1100
1120
1140
0 100 200 300 400 500 600 700 800 900 1000
t (hours)
L(km)
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 100 200 300 400 500 600 700 800 900 1000
t (hours)
L(m/s)
0.007
0.0075
0.008
0.0085
0.009
0.0095
0.01
0 100 200 300 400 500 600 700 800 900 1000
t (hours)
T (N)

T
DG FULL PROBLEM . PROPORTIONAL CONTROL
The length variationλ(τ) is governed by a proportional control law:
λ = λe +∑
Ki (xi − xe,i)
whereKi are gains andxi stands for the variablesξ, η, θ.
d y
d t= My
whereyT =
δξ, δη, δθ, δξ, δη, δθ
.
The detailed stability analysis of this equation is cumbersome. Nevertheless, we firstly consider the simpler
case in which only one gainKξ is different from zero. The characteristic polynomial takes the form:
s3 +
[
3 Kξ
ξ4e
−(
2 − 4
ξ3e
)]
s2 +
[(
6 Jg + 27
ξ4e
+6
ξ7e
)
Kξ −(
105 − 6
ξ3e
+4
ξ6e
)]
s+
+6
[(
9
ξ4e
− 3
ξ7e
)
Kξ −(
45 +9
ξ3e
− 2
ξ6e
)]
= 0
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 78/100

T
DG FULL PROBLEM . PROPORTIONAL CONTROL
The Descartes rule of signs providesa sufficient condition for stability to be fulfilled byKξ . Such a
condition is drawn in figure as a function of the equilibrium valueλe for a massless tether (Jg = 1).
10−6
10−4
10−2
2
2.5
3
3.5
4
4.5
5
K∗ξ
λe
Sufficient condition forKξ to stabilize the system as a function ofλe. Values over the curve (Kξ > K∗ξ )
provide stability.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 79/100

T
DG CONTROL DRAWBACKS . TETHER LENGTH
∆L
∆xe=
1
2 313√
a2 λ
10−6
10−4
10−2
100
100
101
102
103
λ
d Ld xe
Non linearLinear
Ratio between variation of tether length and deviations
of the center of mass vs.λ.
10−2
100
102
104
102
104
106
Sun-EarthEarth-MoonMars-PhobosJupiter-AmalteaJupiter-IoSaturn-Enceladus
L (km)
d Ld xe
Ratio between variation of tether length and deviations
of the center of mass vs. the tether length (km)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 80/100

T
DG CONTROL DRAWBACKS . TETHER TENSION
10−5
10−4
10−3
−5
0
5
10
15
20
TTc
∆ξ
Maximum and minimum tether tension vs. the
initial perturbation∆ξ for λe = 10−2.
10−4
10−3
10−6
10−5
10−4
λe
∆ξ
Zero tether tension∆ξ vs. λe (blue line).
Zero tether length∆ξ vs. λe (red line).
To avoid the zero tension problem (slack tether) is the most strong requirement of this control strategy
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 81/100

T
DG ROTATING TETHERS . EQUILIBRIUM POSITIONS
ξe = ±ρe, ηe = ζe = 0, λe =4ρ5
e
3
(
3 − 1
ρ3e
)
, ρ3e > 1/3
For small values ofλ the above solution provides the asymptotic solution
ξe ≈ (1
3)13 + 3
13
λ
4− 9 (
λ
4)2 +O(λ3)
Comparing with the same results for a non-rotating tether
ξe = ±ρe, ηe = ζe = 0, λ =ρ2
e
3
(
3 ρ3e − 1
)
, ρ3e > 1/3
ξe ≈ (1
3)13 + 3
13 λ − 9 λ2 +O(λ3)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 82/100

T
DG ROTATING TETHERS . PROPORTIONAL CONTROL
λ = λe + Kξδξ + Kξδξ + Kηδη + Kηδη
Through the Routh-Hurwitz theorem, it has been found thatasymptotic stability is guaranteed if the gains
of the control law satisfy the relations
Kξ ≥ 4
3ρe(
15ρ3e − 2
)
Kξ > 0 Kη = 0 Kη = 0
We carried out two simulations of a rotating tether with different values ofKξ andKξ in order to see the
qualitative behavior of the system. The characteristics ofthe simulations are:
λe = 0.0401 (ξe = 0.707); ξ0 − ξe = 10−3, ηe = 10−3; Ω⊥ = 50.
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 83/100

T
DG SIMULATIONS
0.7055 0.706 0.7065 0.707 0.7075 0.708 0.7085 0.709−3
−2
−1
0
1
2
3x 10
−3
δξ
δξ
Kξ = 4
0.7065 0.707 0.7075 0.708−15
−10
−5
0
5x 10
−4
δξ
δξ
Kξ
= 3
Kξ
= 0.5
−1.5 −1 −0.5 0 0.5 1 1.5
x 10−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2x 10
−3
δη
δη
Kξ = 4
−5 0 5 10
x 10−4
−1.5
−1
−0.5
0
0.5
1x 10
−3
δη
δη
Kξ
= 3
Kξ
= 0.5
λe = 0.0401 (ξe = 0.707); ξ0 − ξe = 10−3, ηe = 10−3; Ω⊥ = 50
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 84/100

T
DG SIMULATIONS
0 5 10 15 20 25 3048
50
52
54
56
58
60
62
64
66
τ
Ω⊥
Kξ = 4
0 5 10 15 20 25 3050
51
52
53
54
55
56
57
58
τ
Ω⊥
Kξ
= 3
Kξ
= 0.5
0 5 10 15 20 25 300.185
0.19
0.195
0.2
0.205
0.21
0.215
√λ
τ
Kξ = 4
0 5 10 15 20 25 300.19
0.195
0.2
0.205
0.21
0.215
√λ
τ
Kξ
= 3
Kξ
= 0.5
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 85/100

T
DG ARIADNA PROGRAM
The END ofStability of tethered satellites
at collinear lagrangian points
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 86/100

T
DG Lyapunov orbits
-1.5 -1.0 -0.5 0.0 0.5 1.0 1.5-3
-2
-1
0
1
2
3
x
y
Horizontal stability curve
Vertical stability curve
Orbit period curve
-15 -10 -5 0
-38
-9
-2
0
2
9
38
161
682
2889
3.4
4.
4.5
5.1
5.7
6.3
6.9
7.4
8.
8.6
Jacobi constant
Sta
bilit
yin
dice
s
Per
iod
• Left: sample orbits of the family of Lyapunov orbits aroundL1 (dashed) andL2 (full line) for, from
larger to smaller,C = −1, 0, 1, 2, 3, 4. Right: stability-period diagram of the family of Lyapunovorbits
of the Hill problem. Note thearcsinh scale used for the stability curves.(C is the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 87/100

T
DG Tethered family of Lyapunov orbits: unstable
Horizontal stability curve
Vertical stability curve
Orbit period curve
Critical points
0 1 2 3-4
0
6
64
663
6870
6.2
6.4
6.5
6.6
6.8
6.9
Tether's characteristic length
Stab
ility
inde
x
Peri
od
-0.5 0.0 0.5 1.0 1.5
-2
-1
0
1
2
Ξ
Η
• Left: stability-period diagram of the family of Lyapunov orbits with Jacobi constantC = −0.408295
for tether’s length variations; the horizontal gray lines correspond to the critical valuesk = ±2 (in the
arcsinh scale). Rigth: Hill’s problem Lyapunov orbit (λ = 0, full line) and an orbit with a tehter’s
characteristic lenghtλ = 1 (dotted).(C is the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 88/100

T
DG Tethered family of Lyapunov orbits: unstable
Horizontal stability curve
Vertical stability curve
Orbit period curve
Critical orbits
0 1 2 3-2
1
16
186
2164
25 188
3.
3.2
3.3
3.5
3.6
3.7
Tether's characteristic length
Stab
ility
indi
ces
Peri
od
0.66 0.7 0.74 0.78
-0.2
-0.1
0.0
0.1
0.2
Ξ
Η
• Left: stability-period diagram of a family of Lyapunov orbits close toL2 for tether’s length variations;
the horizontal gray lines correspond to the critical valuesk = ±2 (in thearcsinh scale). Rigth: starting
orbit (λ = 0, full line) and an orbit withλ = 0.1 (dotted).(C is the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 89/100

T
DG Family of eight-shaped orbits
0.00.2
0.40.6
Ξ
-0.20
0.2Η
-1
0
1
Ζ
k1 stability curve
k2 stability curve
Orbit period curve
Critical point
-8 -6 -4 -2 0 2 4
2
7
31
130
549
2327
3.1
3.7
4.4
5.
5.6
6.2
Jacobi constant
Stab
ility
indi
ces
Peri
od
• Left: sample eight-shaped orbits forC = 2 (red),1 (magenta), and0 (blue).Right: stability-period
diagram of the family of eight-shaped orbits of the Hill problem. (C is the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 90/100

T
DG Tethered family of eight-shaped orbits
k1 stability curve
k2 stability curve
Orbit period curve
1: start
2
3
45
6: end
0.00 0.05 0.10 0.15 0.20-2
0
3
17
90
475
2501
2.79
2.93
3.07
3.21
3.34
3.48
3.62
Tether's characteristic length
Stab
ility
indi
ces
Peri
od
0.00.2
0.40.6Ξ
-0.070.07
-0.5
0.0
0.5
Ζ
• Left: stability-period diagram of a family of eight-shaped, periodic orbits with constantC = 2 for
tether’s length variations; the horizontal gray lines correspond to the critical valuesk = ±2. Rigth: stable
orbits forλ = 0.2 (left) λ = 0.215 (center), and unstable orbit of the Hill problem (λ = 0, right). (C is
the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 91/100

T
DG Tethered family of eight-shaped orbits
k1 stability curve
k2 stability curve
Orbit period curve
1: start
2
34
5
6: end
0.00 0.05 0.10 0.15 0.20 0.25 0.30-2
1
10
87
788
7122
64 375
2.12
2.42
2.72
3.02
3.32
3.61
3.91
Tether's characteristic length
Stab
ility
indi
ces
Peri
od
0.00.2
0.40.6Ξ
-0.060.06
-0.5
0.0
0.5
Ζ
• Left: stability-period diagram of a family of eight-shaped, periodic orbits with constantC = 2.7 for
tether’s length variations; the horizontal gray lines correspond to the critical valuesk = ±2. Right: stable
orbits forλ = 0.17 (left, black)λ = 0.184 (center, blue), and unstable orbit of the Hill problem (λ = 0,
right). (C is the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 92/100

T
DG Tethered family of eight-shaped orbits
k1 stability curve
k2 stability curve
Orbit period curve
Bifurcation orbits
0 1 2 3 4 5-2
0
2
9
38
161
682
2.4
2.6
2.7
2.8
2.9
3.
Tether's characteristic length
Stab
ility
indi
ces
Peri
od
• Stability-period diagram of a family of eight-shaped, periodic orbits with constantC = 3 for tether’s
length variations; the horizontal gray line corresponds tothe critical valuesk = +2. (C is the Jacobi
constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 93/100

T
DG Family of Halo orbits
k1 stability curve
k2 stability curve
Orbit period curve
Reflection
1.5 2.0 2.5 3.0 3.5 4.0
-2.
0.
2.
8.
30.
100.
400.
1600.
1.5
1.8
2.
2.2
2.4
2.6
2.8
3.1
Jacobi constant
Stab
ility
indi
ces
Peri
od
0.00.2
0.40.6Ξ
-0.4
-0.2
0.00.2
0.4Η
-0.5
0.0
Ζ
• Left: stability-period diagram of the family of Halo orbitsof the Hill problem. Right: sample stable orbit
for C = 1.08 (the blue and red dots linked by a gray line are the origin andL2 point, respectively).(C is
the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 94/100

T
DG Tethered family of Halo orbits
k1 stability curve
k2 stability curve
Orbit period curve
0 0.00001 0.00003 0.00005 0.00007
-1
0
1
2
2.26
2.27
2.28
2.29
2.3
2.31
2.32
Tether's characteristic length
Stab
ility
indi
ces
Peri
od
0.00.2
0.40.6Ξ
-0.5
0.0
0.5
Η
-0.5
0.0
Ζ
• Left: Stability-period diagram of the family of Halo orbitswith C = 1.07 for tether’s length variations.
Right: stable (full line) and unstable (dashed) Halo orbitsof the Hill problem.(C is the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 95/100

T
DG Tethered family of Halo orbits
k1 stability curve
k2 stability curve
Orbit period curve
1: start
2: reflection
3
4: end
0.000 0.001 0.002 0.003 0.004 0.005 0.006-3
-1
0
2
5
14
2.
2.1
2.2
2.3
2.4
2.5
Tether's characteristic length
Stab
ility
indi
ces
Peri
od
0.00.2
0.40.6Ξ
-0.5
0.0
0.5
Η
-0.5
0.0
Ζ
• Stability-period diagram of the family of Halo orbit withC = 1.15 for tether’s length variations. Right:
unstable Halo orbits of the Hill problem (red and magenta) and stable (blue) Halo orbits with a tethers
characteristic lengthλ = 0.0052. (C is the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 96/100

T
DG Tethered family of Halo orbits
k1 stability curve
k2 stability curve
Orbit period curve
1: start2: reflection
3
4: end
0.000 0.002 0.004 0.006 0.008 0.010-4
-1
0
2
6
19
1.9
2.1
2.2
2.3
2.5
2.6
Tether's characteristic length
Stab
ility
indi
ces
Peri
od
0.00.2
0.40.6Ξ
-0.5
0.0
0.5
Η
-0.5
0.0
Ζ
• Stability-period diagram of the family of Halo orbit withC = 1.2 for tether’s length variations. Right:
unstable Halo orbits of the Hill problem (red and magenta) and stable (blue) Halo orbits with a tethers
characteristic lengthλ = 0.009. (C is the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 97/100

T
DG Tethered family of Halo orbits
k1 stability curve
k2 stability curve
Orbit period curve1: start
2: reflection
3
45
6
7: end
0.00 0.02 0.04 0.06 0.08-51
-3
1
23
383
6391
2.1
2.3
2.4
2.6
2.8
2.9
Tether's characteristic length
Stab
ility
indi
ces
Peri
od
• Stability-period diagram of the family of Halo orbit withC = 2 for tether’s length variations. The
horizontal, gray lines mark the critical valuesk = ±2 in thearcsinh scale.(C is the Jacobi constant)
Dynamics and Stability of Tethered Satellites at Lagrangian Points– p. 98/100





























