Embed Size (px)
Citation preview

Motorized Skateboard Stabilization usingFuzzy Controller
Mohsen Davoudi1, Mohammad Bagher Menhaj2, and Mehdi Davoudi3
1 Department of Electrical Engineering, AIU Tehran south [email protected]
2 Department of Electrical Engineering, AmirKabir University of [email protected]
3 Department of Electrical Engineering,Imam Hossein [email protected]
Summary. In this paper, a fuzzy tuner is designed for a motorized skateboard totune KI and KP coefficients of the PI controller to stabilize the skateboard rider.The fuzzy if-then rules are derived from physical reactions of body against externalforces. The PI controller tracks the set point chosen by riders through a handleand applies a proper force to the skateboard to keep dynamic equilibrium of theperson stable during the travel. In this paper through different simulations, it hasshown that the proposed controller make the system track the set point as quicklyas possible while having a remarkably bigger traveling distance without any sort ofinstability problem.
1 Introduction
Motor scooter is a two-wheeled motor vehicle similar to a motorcycle or two-wheeled children’s vehicle resembling a skateboard with a handlebar. Mo-torized skateboard is a four-wheeled vehicle. The percentage of people doSkate boarding is 5percent [?]. Staff from the U.S. Consumer Product SafetyCommission (CPSC) recently conducted a special study to track injuries as-sociated with powered scooters, a recreational product growing in popularity.From July 2003 through June 2004, an estimated 10,015 powered scooter-related emergency room-treated injuries were reported through CPSC’s Na-tional Electronic Injury Surveillance System (NEISS)[?].Usually the control of a motorized skateboard is done by a handle. But formany people it’s very difficult to learn how to control the skateboard andkeep balance [?]. The concept which is outlined in this paper is controllinga Motorized skateboard with a person standing on to keep dynamic equi-librium easily and increase velocity and traveled distance as well. Supposethat the skateboard has an electric motor, battery pack, a handle contain-ing Start/Stop button which is run on a standard road. The control of the

2 Mohsen Davoudi, Mohammad Bagher Menhaj, and Mehdi Davoudi
Skateboard contains two theory sections: 1) determination of the physical pa-rameters of the person standing on the skateboard, 2) changing the parametersof the PI controller using data gathered in section 1. Physical parameters ofa person needed in this analysis are weight, flexibility of the joints, lengthof every organ of the body such as shank, leg, chest, head, etc [?]. To reachthese objectives, we design a system to estimate amount of changes in the PIcontroller using the data driven from sensors on the skateboard and a fuzzytuner.In the first step a pulse wave is sent to the driver of the electric motor to runthe motor in a limited time, e.g. 5 seconds. This action leads to a pulse likeforce to both the skateboard and the person making a movement. The personreacts to this force and starts to oscillate. Every one has its own specific reac-tion [?]. It depends on age, flexibility of joints, length, weight, etc [?]. Then,the system records the velocity signal during the time. Practically the velocitysignal can be obtained through a shaft encoder sensor installed in a wheel ofthe skateboard. Finally, by processing the velocity signal, getting informationneeded for the fuzzy tuner and applying some rules in the Fuzzy InferenceSystem (FIS), the fuzzy tuner changes the coefficients KP and KI in thePI controller. The rules are derived from practical skateboarding situations,physics of motion and perception of the people reaction on the skateboard.
Fig. 1. Variable Frequency Drive on pumping plant
2 Skateboard model
The modeled skateboard has 50cm length and 5 kg weight. A general modelis used for skateboard based on Euler Springs Euler Springs model storesno static energy in the skateboard and dynamic energy causes vibration inmotion (Fig. 2). The resonant frequency is:

Motorized Skateboard Stabilization using Fuzzy Controller 3
Fig. 2. dynamic energy and vibration in motion
ω =
√k
m=
√g
L(1)
where kis the coefficient of the springs connected to the skate (related to thebody model), m is the weight of the skateboard (m = 5kg), g is the Gravityand L is the displacement. Because of puddles on the road the dynamic energyis changed during the time. The resonant frequency usually is above 10 Hz(ω ≥ 10Hz). This frequency is seen in the velocity signal but doesn’t give usany useful information about the body parameters.Signal processor contains a filter to eliminate the above frequencies. Fig. 3shows the skate model implemented in MATLAB/Sim mechanics. This modelcontains an actuator (motor driver) and a sensor (shaft encoder).
Fig. 3. skate model implemented in MATLAB/Sim mechanics
3 Body Model
The postural balance system is one of the most fundamental functions for hu-man voluntary motion. This system has been analyzed and modeled by manyresearchers in the past. In the field of biomechanics, many researchers workon the human balance control. Some of them investigated features of balancecontrol of the real human [?, ?].They actually applied perturbations to the real human, and measured the

4 Mohsen Davoudi, Mohammad Bagher Menhaj, and Mehdi Davoudi
force, the velocity, or several physical parameters. Others investigated themotion of balance recovery by stepping [?, ?]. In these researches, the motionof the real human is analyzed. For postural balance, Horak et al [?] foundthat human use three strategies for keeping the balance, the ankle, hip andarm strategy. The ankle strategy is a strategy to use mainly the ankle joint torestore the position of the center of gravity back to the equilibrium state. Thisstrategy is chosen when the foot surface is long enough relative to the footlength, so that the subject can fully use his/her toes to push back the body.When the foot surface is short relative to the foot length, the subject uses thehip and trunk joint to keep the balance, which is called the hip strategy.Kuo et al [?] theoretically analyzed such strategies using the musculoskeletalmodel. When a person is about to lose his/her balance, and is under a con-dition that he/she cannot step out one leg, the arms are recursively rotatedto work as the final servo to move the center of mass back over the feet. Thisstrategy is effective in returning the center of mass over the feet, because theangular momentum of the trunk of the body is canceled out by the angularmomentum generated by the rotation of the arms. In this paper, we propose anew human body model which is composed of five body segments, the shank,thigh, trunk, head and arm.The human-like body motion is obtained by rigid body, spring and damperwhich are used for every joint in our body model. The arm strategy appearswithout any prior feed-forward input when large perturbation force is appliedto the body. The motion of recovery closely resembles those by real human.Fig. 4 shows the model of a sample joint in MATLAB/Sim mechanics. Otherjoints are similar to this joint. In order to model the above three strategies,feedback force is applied to the ankle, hip and arm joints.
Fig. 4. model of a sample joint in MATLAB/Sim mechanics
4 Signal processor
The velocity signal is only reachable signal that is derived from shaft encodersensor practically. Velocity signal is given to two Band Pass Filters (BPF).Therefore, vibration frequency is divided into two frequency bands: a) 2-4 Hz,b) 4-10 Hz.First band indicates the low frequency vibration of the body and the second

Motorized Skateboard Stabilization using Fuzzy Controller 5
indicates high frequency vibration. Relationships between signal parametersin these two bands help us find out the person’s body parameters and lead tomodel them into IF-THEN fuzzy rules. For example, we found out that thesignal of a short strong person on the skate in band (b) has a higher valueof energy in comparison with band (a) because of rapid reactions to changes.In this case, the skate can be run with a higher speed by means of increasingthe KI coefficient. For a tall weak inflexible person that has slow reactions,energy of band (a) is higher than energy of band (b). So a minimum value ofKI and KP is needed to control the motion equilibrium. We first calculatethe energy of the velocity signal in these bands:
S1 = (∫
f21 dt)1/2 (2)
S2 = (∫
f22 dt)1/2 (3)
where f1 is the output of the 2− 4Hz BPF and S1 is energy of the signal inthis band. f2 is output of the 4 − 10Hz BPF and S2 is energy of the signalin this band. Then, we count zero crossings in f1 and f2 signals within theexperiment time to obtain the zc1 value and the zc2 value, respectively. Thefollowing parameters
A =zc1
zc2(4)
B =S1
S2(5)
C =S1
zc1+
S2
zc2(6)
are used to tune KP and KI by fuzzy tuner based on the aforementionedrules. The next step is to design the fuzzy tuner which is strongly dependentupon the physical reactions of the rider. This information helps us determinefuzzy sets boundaries on every joint’s position and organs’ weights. The Fuzzytuner which is outlined in the next section has fixed rules.
5 Fuzzy tuner
In this section, a fuzzy tuner is introduced to tune the PI controller. Thistuner is described by the Following set of IF-THEN rules.R1:(A is SMALL) and (B is SMALL) and (C is HIGH), then (KI is H),(KPis H)R2:(A is SMALL) and (B is SMALL) and (C is SMALL), then (KI is M),(KPis M)R3:(A is SMALL) and (B is HIGH) and (C is HIGH), then (KI is H),(KP is

6 Mohsen Davoudi, Mohammad Bagher Menhaj, and Mehdi Davoudi
LL)R4:(A is HIGH) and (B is HIGH) and (C is SMALL), then (KI is L),(KP isLL)R5:(A is HIGH) and (B is SMALL) and (C is MEDIUM), then (KI is HH),(KPis H)
In the above SMALL, MEDIUM, HIGH and LL, L, M, H, HH are linguisticterms of antecedent fuzzy sets, and in the then parts LL, L, M, H ,HH standfor very low, low, medium, high , very high, respectively. We use a generalform to describe these fuzzy rules:
Ri:(A is x1) and (B is x2) and (C is x3), then (KI is y1), (KP is y2),i = 1,...,16
where x1, x2, x3 are triangle-shaped fuzzy numbers and y1, y2 are fuzzysingletons. An arbitrary fuzzy set A is depicted in Fig. 5. Fig. 6 representsthe term sets of the output linguistic variable KI.
Fig. 5. An arbitrary fuzzy set A
Fig. 6. term sets of output linguistic variable
Let X and Y be the input and output space, and A,B,C be arbitraryfuzzy sets in X. Then, a fuzzy set, [A,B,C] ◦Ri in Y , can be determined byeach Ri. We use the sup-min compositional rule of inference:
miKIi = µAi(x1).µBi(x2).µCi(x3) (7)
miKP i = µAi(x1).µBi(x2).µCi(x3) (8)
By using the center of area defuzzifier, we can obtain a crisp outputsKI,KP :
Motorized Skateboard Stabilization using Fuzzy Controller 7
KI =∑
miKIi · yi∑mi
KIi
, i = 1, ..., 16 (9)
where yi is center of the KIi area.
KP =∑
miKP i · yi∑mi
KP i
, i = 1, ..., 16 (10)
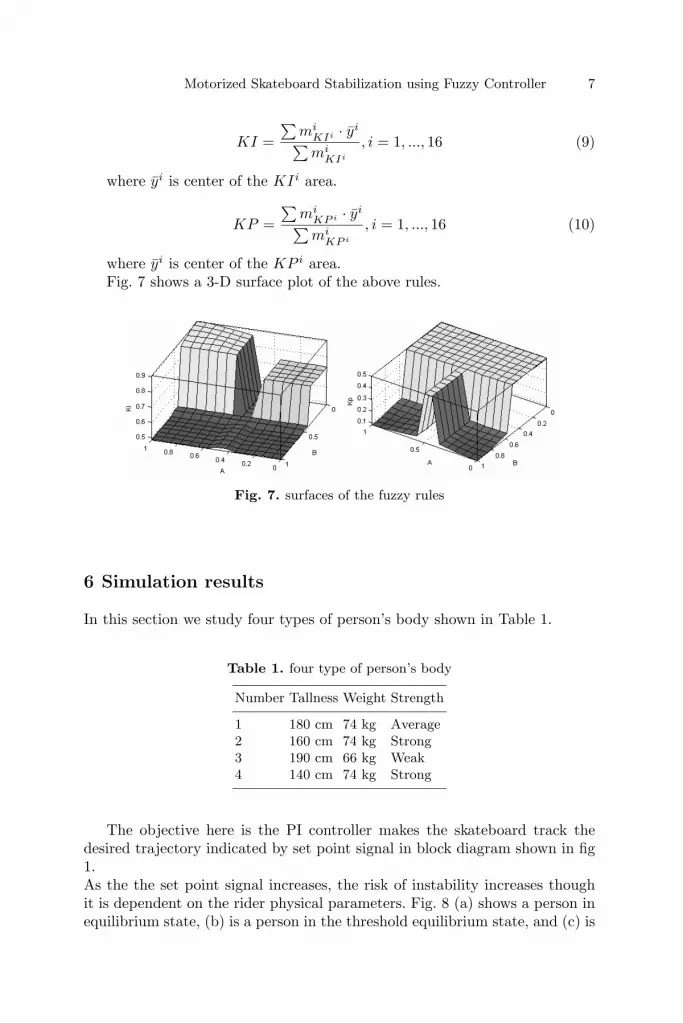
where yi is center of the KP i area.Fig. 7 shows a 3-D surface plot of the above rules.
Fig. 7. surfaces of the fuzzy rules
6 Simulation results
In this section we study four types of person’s body shown in Table 1.
Table 1. four type of person’s body
Number Tallness Weight Strength
1 180 cm 74 kg Average2 160 cm 74 kg Strong3 190 cm 66 kg Weak4 140 cm 74 kg Strong
The objective here is the PI controller makes the skateboard track thedesired trajectory indicated by set point signal in block diagram shown in fig1.As the the set point signal increases, the risk of instability increases thoughit is dependent on the rider physical parameters. Fig. 8 (a) shows a person inequilibrium state, (b) is a person in the threshold equilibrium state, and (c) is

8 Mohsen Davoudi, Mohammad Bagher Menhaj, and Mehdi Davoudi
Fig. 8. A person on the skateboard in three states
a person in tumble state. In this experiment a positive pulse applied in t=5swith a 5Sec duration (altitude = 1) and a negative pulse applied in t = 20swith 5 sec duration (altitude = 1) (Fig. 9)
Fig. 9. The Set point signal
The experiment contains a case in which an over exciting force leadingto an immediate instability condition is applied. Fig. 10 shows the open loopsimulation results for the first person whose parameters are given in table 1.Here in this experiment we assumed in this case traveled distance is 8 meters in30 seconds. Fig. 11 shows a closed loop simulation results for KP=1, KI=0.2.In this case the traveled distance becomes 25meters.
Fig. 12 shows the simulation results the parameters Kp and Ki are adjustedby the propsed fuzzy tuner. In this case the traveled distance becomes 51meters in 30seconds
Fig. 13(a) shows the trajectory of controller parameter KI . Fig. 13(b)shows the trajectory of controller parameter KP .

Motorized Skateboard Stabilization using Fuzzy Controller 9
Fig. 10. velocity signal (without using any feedback controller)
Fig. 11. velocity signal (PI controller with constant parameters)
Fig. 12. velocity signal (with fuzzy tuner)
Fig. 13. KI (a) and KP (b) coefficients

10 Mohsen Davoudi, Mohammad Bagher Menhaj, and Mehdi Davoudi
7 Conclusion
In this paper a Fuzzy tuner has been developed for a motorized skateboard.The tuner adjust the parameters of a PI controller online. The rule basedesigned for the tuner came from reactions of riders against external forces sothat to keep dynamic equilibrium state. As the the set point signal increases,the risk of instability increases. Thus, the PI controller tracks the desired setpoint signal by applying proper forces to the skateboard to keep dynamicequilibrium state of the rider during traveling.
References
1. Prof. David Blair,Dr. Li Ju, Dr. John Winterflood, The Investigation of Ge-ometric Anti-springs Applied to Euler Spring Vibration Isolators , Eu -JeenChin Honours 2002
2. Wayne Wooten. Simulations of Leaping, Tumbling, Landing, and BalancingHumans. PhD thesis, Georgia Institue of Technology,1997.
3. Taku Komura, Yoshihisa Shinagawa, and Tosiyasu L. Kunii. Creating and re-targetting motion by the musculoskeletal human body model. The Visual Com-puter, (5):254-270, 2000.
4. Yi-Chung Pai and James Patton. Center of mass velocity-position predictionsfor balance control. Journal of Biomechanics, 30(4), 347-354, 1997
5. Hyeongseok Ko and Norman I. Badler. Animating human locomotion with in-verse dynamics. IEEE Computer
6. M. Oshita and A. makinouchi. A Dynamic Motion Control Technique forHuman-like Articulated Figures. Eurotraphics 2001, vol.20, Number3, 2001
7. R. Hayashi and S. Tsujio High Performance Jumping Movements by Pendulum-type Jumping Machines In Proc. IEEE/RSJ Int. conf. on Intelligent Robots andSystems 722-727, Maui, USA, 2001
8. C. Paul, R. Dravid and F. Iida Design and Control of a Pendulum DrivenHopping Robot to appear In Proc. The IEEE/RSJ International Conferenceon Intelligent Robots and Systems Lausanne, Switzerland, 2002.
9. Arthur D. Kuo and Felix E. Zajac. Human standing posture: Multi-joint move-ment strategies based on biomechanical constraints. Progress in Brain Research,97, 2000.
10. J. Yen, R. Langari, Fuzzy Logic: Intelligence, Control and Information, firsted., Prentice Hall, Berlin, 1998. Graphics and Applications,March:50-59, 1996.
11. D. Filev, R.R. Yager, Essentials of Fuzzy Modeling and Control, Wiley-Interscience, 1994.
12. A. Kaufmann, M.M. Gupta, Introduction to Fuzzy Arithmetic: Theory andApplications, Von Nostrand, New York, 1985.
13. V. Novak, I. Perfilieva, J. Mockor, Mathematical Principles of Fuzzy Logic,Kluwer, Boston/ Dordrecht, 1999.
14. T.J. Ross, Fuzzy Logic with Engineering Applications, second ed., Wiley, 2004.15. Woollacott M.H., von Hosten C, and R osblad B. Fixed patterns of rapid postu-
ral responses among leg muscles during stance. Experimental Brain Research,30:13-24, 1977.

Motorized Skateboard Stabilization using Fuzzy Controller 11
16. Wayne Wooten. Simulations of Leaping, Tumbling, Landing, and BalancingHumans. PhD thesis, Georgia Institue of Technology,1997.
17. Yi-Chung Pai and James Patton. Center of mass velocity-position predictionsfor balance control. Journal of Biomechanics, 30(4), 347-354, 1997
18. Elisabetta Papa, Aurelio Cappozzo. A telescopic inverted-pendulum model ofthe musculo-skeletarl system and its use for the analysis of the sit-to-standmotor task. Jounal of Biomechanics, 32:1205-1212,1999





























