Embed Size (px)
Citation preview

Journal of Geodesy manuscript No.(will be inserted by the editor)
Thomas Hobiger · Tetsuro Kondo · Yasuhiro
Koyama · Kazuhiro Takashima · Harald Schuh
Using VLBI fringe-phase information from geodetic
experiments for short-period ionospheric studies
Received: 09/05/2006 / Accepted: 05/02/2007
T. Hobiger
Kashima Space Research Center
National Institute of Information and Communications Technology (NICT)
893-1 Hirai, Kashima, 314-0012 Ibaraki, Japan
Tel.: +81-0-299-84-7136
Fax: +81-0-299-84-7159
E-mail: [email protected]
T. Kondo
Kashima Space Research Center
National Institute of Information and Communications Technology (NICT)
893-1 Hirai, Kashima, Ibaraki 314-0012 Japan
Tel.: +81-299-84-7137
Fax: +81-299-84-7159
E-mail: [email protected]
Y. Koyama
Kashima Space Research Center
National Institute of Information and Communications Technology (NICT)
893-1 Hirai, Kashima, Ibaraki 314-0012 Japan
Tel.: +81-299-84-7143
Fax: +81-299-84-7159
E-mail: [email protected]
K. Takashima

2 Thomas Hobiger et al.
VLBI group
Geographical Survey Institute
Kitasato 1, Tsukuba, Ibaraki, 305-0811 Japan
Tel.: +81-29-864-4801
Fax: +81-29-864-1802
E-mail: [email protected]
H. Schuh
Institute of Geodesy and Geophysics
Vienna University of Technology
Gusshausstrasse 27-29, 1040 Vienna, Austria
Tel.: +43-1-58801-12860
Fax: +43-1-58801-12896
E-mail: [email protected]

Short-period Ionospheric Studies By VLBI 3
Abstract The usage of Very Long Baseline Interferometry (VLBI) fringe-phase information in geode-
tic VLBI is a new field of research, which can be used for the detection of short-period (i.e., several
minutes) variations (scintillations) of the ionosphere. This paper presents a method for the extraction
of such disturbances and discusses how dispersive influences can be separated from intra-scan delay
variations. A proper functional and stochastic model for the separation of the different effects is pre-
sented and the algorithms are applied to real measurements. In an example, it is shown that a traveling
ionospheric disturbance in Antarctica can be detected very precisely. A possible physical origin and
the propagation properties of the disturbance are presented and the results are compared with GPS
measurements. The benefit of this method for other applications is also discussed.
Keywords VLBI · fringe phase · intra-scan variation · ionosphere · total electron content · traveling
ionospheric disturbances · plasma patches
1 Introduction
It has been shown by Hobiger et al. (2006) that it is possible to derive ionospheric parameters from
dual-frequency geodetic Very Long Baseline Interferometry (VLBI) experiments, and that the results
agree well with outcomes from GPS and satellite altimetry measurements. Hobiger (2006) mentioned
the possibility to utilize geodetic VLBI data for the detection of short-period (i.e., variations of only
a few minutes) ionosphere disturbances. This concept will be extended and improved further by this
paper.
Earlier papers described the effect of ionospheric disturbances on radio astronomy measurements in
which information about the ionized media was obtained qualitatively (Roberts et al. 1982b), but from
which it was nevertheless possible to draw some conclusions about the physical origin of the detected
variations (Roberts et al. 1982a). Local antenna arrays like the Very Large Array (VLA) were used to
investigate ionospheric characteristics (e.g., Jacobson and Erickson (1982) or Kassim et al. (1993)) at
frequencies lower than 1 GHz.
Either the ionosphere was assumed to be the dominating factor for phase variations or ionospheric
contributions were obtained from iterative imaging steps. However, our paper presents a method to
clearly separate ionospheric from non-dispersive influences utilizing dual-band multi-channel observa-

4 Thomas Hobiger et al.
tions, as used in geodetic VLBI. We will show how standard geodetic VLBI observations can be utilized
to detect short-period ionospheric variations and, together with GPS measurements, the cause of such
disturbances can be found.
1.1 Basics
Two antennas separated by any distance on Earth, pointing at the same radio source and collecting
the signal in the same frequency bands, can be seen as the simplest possible configuration for VLBI.
The time-of-arrival difference is called time delay and is the main measurement type for geodetic and
geophysical applications (Thompson et al. 2001).
1.2 Receiving system and instrumental influences
An atomic clock can be taken to provide a stable signal in order to synchronize interferometer oper-
ations between the reference station and each remote station, even at distances of several thousands
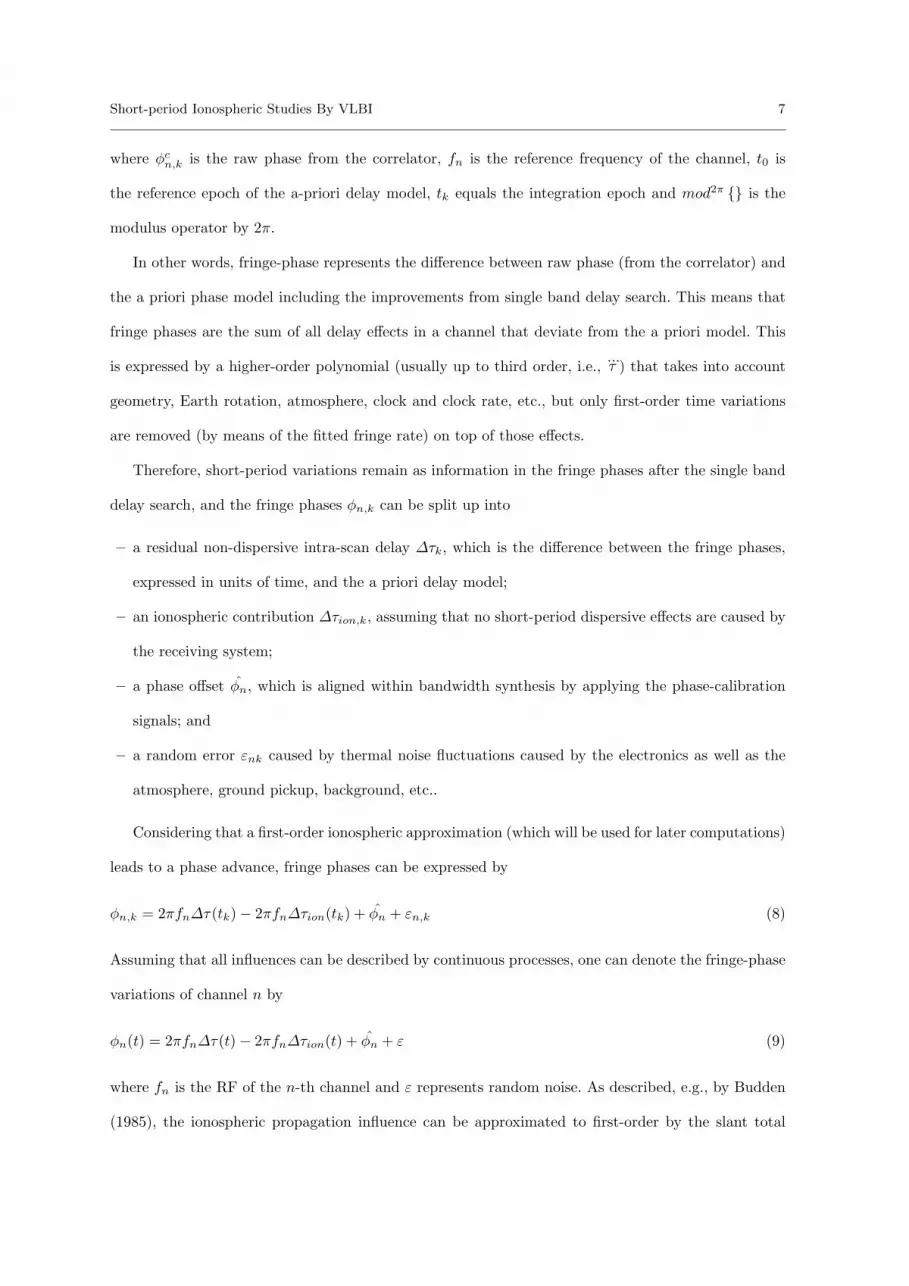
of kilometers. Figure 1 shows the typical VLBI signal flow at each station. Generally radio signals
(RF frequencies) caught by the antenna and amplified by the low noise amplifier (LNA) are mixed
with a local oscillator (LO) signal, which is phase-locked to a frequency standard, and then are down-
converted to an intermediate frequency (IF) signal, which lowers transmission losses efficiently as the
signal passes through the coaxial cables.
Figure 1 near here
In the next stage, the IF signal is separated into several channels and down-converted to baseband
frequencies (also called video frequencies, as conversion is done by video converters) ranging from zero
to several MHz. The video signal in each channel is then converted from an analog signal to a digital
one by the analog/digital (A/D) converter. Later the digitized signal is tagged with timing marks
within the formatter section of the data recorder. The formatter prepares the signal for recording and
sends it to the recorder (i.e., tape drive or hard disc). Recently, experiments aiming at (near) real-time
VLBI were carried out (e.g., Koyama et al. (2005)).
Correlation basically involves integration and multiplication operations on the digital signals, which
are sent from the two separate stations to the correlator center or are buffered on disks/tapes before

Short-period Ionospheric Studies By VLBI 5
transferring the data, and is done either by a hard-wired correlator or by software (software correlator;
see Kondo et al. (2004)), capable of performing the same tasks.
The following section will briefly summarize the basics of correlation and discuss the method by
which fringe-phase information used for this study is obtained.
1.3 Correlator and its output
The correlator is used to integrate the correlation function every one (or two) seconds (as in geodetic
experiments) by making continuous corrections to the signal data stream in order to compensate for
variations in delay and Doppler shift due to the rotation of the Earth. There are two types of correlators:
the XF type correlator first performs the multiplication operation, then uses a Fourier transform to
convert the resulting cross-correlation function from the time domain to the frequency domain. The
FX type correlator first performs the Fourier transform of each data stream and then multiplies these
outputs with each other (Zensus et al. 1995).
The XF correlator was developed to achieve higher processing speed and is used for geodetic
applications. Following Takahashi et al. (2000), the cross-correlation function after fringe stopping
(i.e., mixing the received signal with a local oscillator frequency, which is equivalent to the Doppler
shift caused by Earth rotation) can be written by
R(τ) = Rr(τ)±Ri(τ) (1)
where the positive sign is valid for τ < 0 and the negative one for τ > 0. The real (Rr(τ)) and imaginary
(Ri(τ)) parts of the correlation function can be computed by Fourier transform as
Rr(τ) =12
[U(τ) + L(τ)] (2)
Ri(τ) = −12j [U(τ)− L(τ)] (3)
where
U(τ) =∫ [
X(f − fr)ejφ0 · Y ∗(f)]ej2πfτdf (4)
L(τ) =∫ [
X(f + fr)e−jφ0 · Y ∗(f)]ej2πfτdf (5)

6 Thomas Hobiger et al.
were introduced. X(f) and Y (f) represent the Fourier transformed signals x(t) and y(t) received at
stations X and Y. The fringe rotation frequency (fr = f τ) can be computed from the a priori model,
and φ0 represents an initial phase at the beginning of the scan.
Fringe stopping can be performed either in the baseband or in the video band center. Usually the
latter approach is used since it has the advantage that correlation losses during fringe stopping are
only about 3.4% (Thompson et al. 2001). The video cross-spectrum Sv(j, k, n) for the n−th channel
serves as a basis for the coarse search function in order to determine delay and delay rate for each
channel.
F (n,∆τ, ∆τ) =1K
K∑
k=1
1J − 1
J−1∑
j=1
Sv(j, k, n)e−j2πfvj ∆τ
· e−j2πfn
0 ∆τ∆t k (6)
where k stands for the index of the individual integration (as mentioned in the beginning of this
section), j acts as an index for the frequency bin within the video band and ∆t reflects the duration
of the individual integrations. Values ∆τ, ∆τ that maximize Eq. (6) are added to the a priori model,
a process called single-band delay search (Takahashi et al. 2000).
Geodetic observations are carried out at several channels within two distinct frequency bands in
order to achieve higher precision in the group delay measurements (Fig. 2). Thus, aligning data from
all channels with the help of the phase calibration (PCAL) signals and performing a multi-band delay
search (called bandwidth synthesis) gives the group delay observables for X- and S-band, which are
the input values for ensuing geodetic analysis (Takahashi et al. 2000).
Fig. 2 near here
1.4 Fringe phase and its information content
After correlation of the VLBI signals, a single-band delay search provides delay ∆τ and delay rate ∆τ ,
which can be used to update the a priori values used for correlation. The so-called (residual) fringe
phase φn,k for channel n and parameter period k is given by
φn,k = φcn,k −mod2π {2πfn[∆τ + ∆τ(tk − t0)]} (7)
Short-period Ionospheric Studies By VLBI 7
where φcn,k is the raw phase from the correlator, fn is the reference frequency of the channel, t0 is
the reference epoch of the a-priori delay model, tk equals the integration epoch and mod2π {} is the
modulus operator by 2π.
In other words, fringe-phase represents the difference between raw phase (from the correlator) and
the a priori phase model including the improvements from single band delay search. This means that
fringe phases are the sum of all delay effects in a channel that deviate from the a priori model. This
is expressed by a higher-order polynomial (usually up to third order, i.e.,...τ ) that takes into account
geometry, Earth rotation, atmosphere, clock and clock rate, etc., but only first-order time variations
are removed (by means of the fitted fringe rate) on top of those effects.
Therefore, short-period variations remain as information in the fringe phases after the single band
delay search, and the fringe phases φn,k can be split up into
– a residual non-dispersive intra-scan delay ∆τk, which is the difference between the fringe phases,
expressed in units of time, and the a priori delay model;
– an ionospheric contribution ∆τion,k, assuming that no short-period dispersive effects are caused by
the receiving system;
– a phase offset φn, which is aligned within bandwidth synthesis by applying the phase-calibration
signals; and
– a random error εnk caused by thermal noise fluctuations caused by the electronics as well as the
atmosphere, ground pickup, background, etc..
Considering that a first-order ionospheric approximation (which will be used for later computations)
leads to a phase advance, fringe phases can be expressed by
φn,k = 2πfn∆τ(tk)− 2πfn∆τion(tk) + φn + εn,k (8)
Assuming that all influences can be described by continuous processes, one can denote the fringe-phase
variations of channel n by
φn(t) = 2πfn∆τ(t)− 2πfn∆τion(t) + φn + ε (9)
where fn is the RF of the n-th channel and ε represents random noise. As described, e.g., by Budden
(1985), the ionospheric propagation influence can be approximated to first-order by the slant total

8 Thomas Hobiger et al.
electron content (STEC) along the ray path
τion =40.308cf2
S∫
R
ne(s) ds =40.308cf2
STEC (10)
where c is the speed of light (m s−1) and ne(s) represents the electron density (electrons m−3 ) along
the ray path between R and S. STEC is measured in total electron content units (TECU), where 1
TECU = 1016 electrons m−2.
For observations over a baseline between stations A and B,
∆τion(t) =40.308cf2
[STECA(t)− STECB(t)] =40.308cf2
∆STEC(t). (11)
Thus, the difference of the ionospheric conditions between station A and B determines the ionospheric
delay. Therefore Eq. (9) can be re-written as
φn(t) = 2πfn∆τ(t)− 2π40.308cfn
∆STEC(t) + φn + ε . (12)
Equation (12) reveals that all time-variable influences on intra-scan phases are either proportional
(residual delay) or inversely proportional (TEC) to the frequency of the concerned channel. Pure
phase variations, independent of channel frequency, are thought to be negligible as they are mainly
caused by frequency drifts of the oscillator, which is assumed to be stable within one scan of usually
60s to 300s (as for the scan analyzed in section 3, this requirement was verified by checking phase
calibration signals.).
For longer scans, changes in the room temperature might evoke a drift of the frequency standard,
which leads to a non-dispersive delay-like phase variation within the channel. In such cases, it is possible
to detect and remove such phase variations by utilizing PCAL phases. Using single channel data only,
it is impossible to separate ionospheric contributions from delay changes.
However, if fringe phases can be computed for individual channels, it becomes possible to distinguish
the ionospheric effects as they are scaled by the corresponding channel frequency. Using a proper but
simple model, which is able to deal with time variations as described above, it will become possible to
estimate these effects by an adjustment process.

Short-period Ionospheric Studies By VLBI 9
1.5 Functional model for intra-scan delay variations
Short-period ionospheric variations (periods up to some tens of minutes) are expected not to happen
suddenly, but are thought to be phenomena that develop steadily or show continuous changes of TEC
(Afraimovich et al. 2004). The corresponding excitations have many physical causes arising in the
solar-terrestrial environment and cover geomagnetic disturbances, solar variations, and gravity waves,
which are caused by earthquakes, tsunamis (Ducic et al. 2003) or rocket launches (Afraimovich et al.
2000). Therefore, any descriptive model of ∆STEC and ∆τ(t) should be a continuous, smooth and
easy-to-implement function.
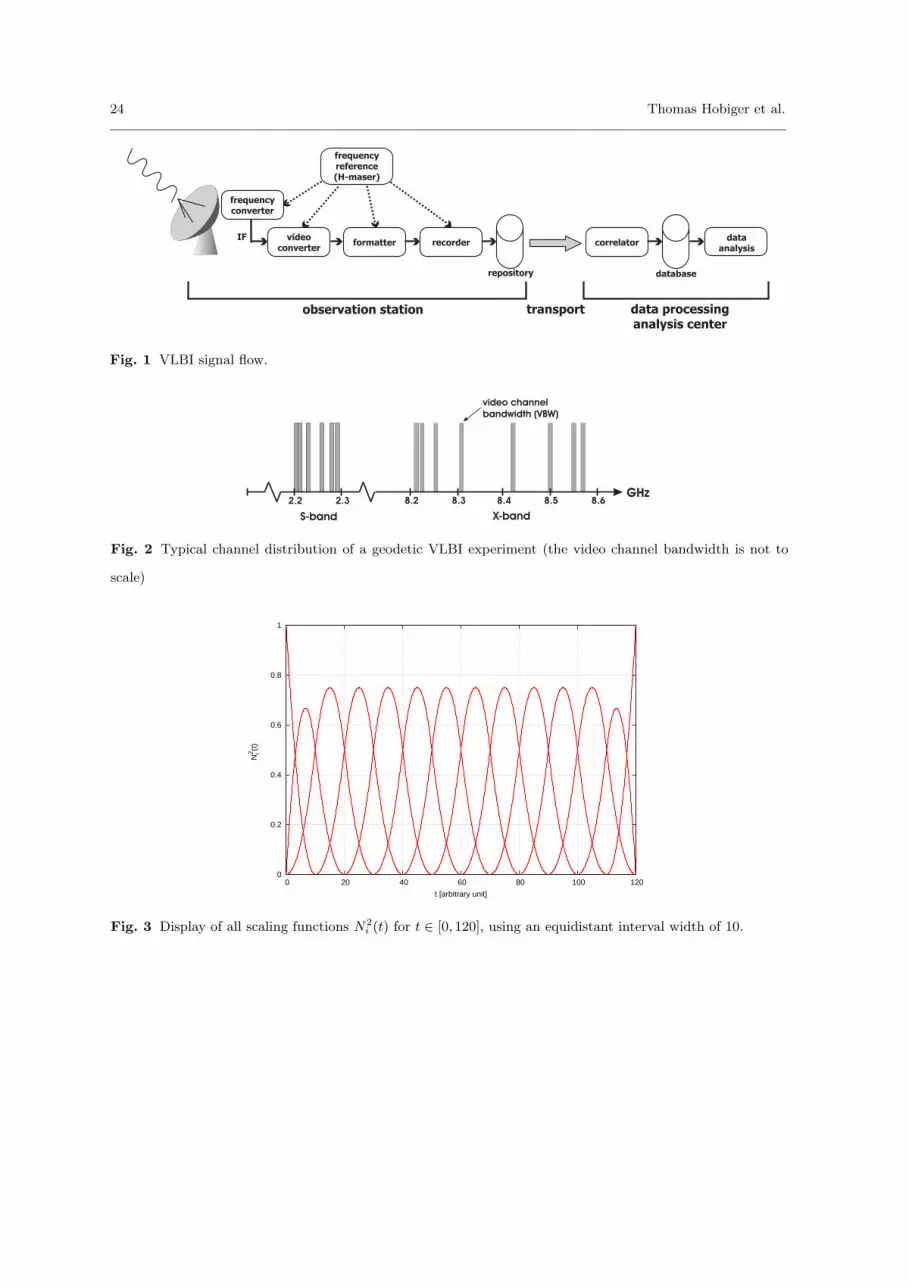
In the following, we use the quadratic B-spline N2(t) as a function of which the scaling coefficients
are determined by an adjustment process, since it fulfills above conditions and is easy to implement.
The advantages of this approach are discussed by e.g., Ogden (1997) or Schmidt (2001).
Given positive integers d and k, with k ≥ d, and a collection of non-decreasing values t0, t1, . . . , tk+d+1
called knots, the non-uniform B-spline basis functions of degree d are defined recursively as follows
(Stollnitz et al. 1995). For i = 0, 1, . . . , k, and for r = 1, 2, . . . , k, let
N0i (t) =
1 if ti ≤ t < ti+1
0 otherwise
(13)
Nri (t) =
t− titi+r − ti
Nr−1i (t) +
ti+r+1 − t
ti+r+1 − ti+1Nr−1
i+1 (t) (14)
(Note: The fractions in Eq. (14) are set to zero when their denominators are zero). So-called endpoint-
interpolating B-splines of degree d on the interval [TA, TB ] can be achieved when the first and last
d + 1 knots are set to TA and TB , respectively.
Figure 3 near here
Figure 3 shows an example of endpoint-interpolating quadratic B-splines, assuming t ∈ [0, 120]
and an equidistant interval width of 10. For our purposes, we use quadratic B-splines N2i (t) and
set t ∈ [0, Tscan] seconds, where Tscan denotes the scan duration. Usually the time resolution of fringe
phases is set by the correlator and is chosen to be one or two seconds for geodetic applications. Software
correlators allow calculation of nearly any integration time, but signal to noise ratio (SNR) should be

10 Thomas Hobiger et al.
high enough to allow phase connection. The number of intervals can be set in accordance with the
expected frequency content.
For our studies, we used an interval length of 20s to detect even smallest ionospheric and instru-
mental variations. Thus, we set L = ceil(Tscan/20) (where ceil(x) gives the smallest integer greater
than or equal to x) and obtain the functional model for adjustment (using Eq. (12)).
φn(t) = 2πfn
L∑
l=0
Al ·N2l (t)− 2πC
fn
L∑
l=0
Bl ·N2l (t) + φn (15)
with the constant C = 40.308/c; Al represents the unknown coefficients of the residual intra-scan delay
and Bl those for ∆STEC.
The phase offsets φn can be determined together with the other unknowns in the adjustment
process. Fringe-phase information from several channels is necessary to separate these effects from
each other and to obtain reliable and robust results. When M represents the number of channels, then
the number u of unknown coefficients is given by
u = 2 · L + M − 2 (16)
The last term of Eq. (16) can be explained by the fact that phase offsets can only be estimated for
M −2 channels, since constant terms in the quadratic B-spline models for the residual intra-scan delay
and the ionosphere variation can be treated as phase offsets for two individual channels. As a convention
for dual-band observations (see the example given in section 3, using 14 channels, distributed over two
bands), we have chosen the first channel of each band to be free of phase offsets.
1.6 Stochastic model for intra-scan delay variations
The weighting of each fringe phase data-point is important since fringe phase quality can be degraded
within a scan by a myriad of instrumental effects (e.g., Petrov (2000) and Ray and Corey (1991)). As
described, e.g., by Takahashi et al. (2000), the standard deviation of phase measurements is inversely
proportional to their signal-to-noise ratio (SNR)
σφ =1
SNR(17)

Short-period Ionospheric Studies By VLBI 11
The SNR is computed from the correlation amplitude ρ0 (i.e., the absolute values of the complex
correlation function, already compensated for sampling losses), the recorded bandwidth B and the
integration length ∆t as follows
SNR = ρ0
√2B∆t (18)
Since the SNR also takes into account that the last fringe phase data-point of a scan can be shorter
than the nominal integration period, we use SNR information to set up the weight matrix for the
adjustment process. Since the weights are inversely proportional to the variances, we get
Pxy =
SNR2xy (x = y)
0 (x 6= y)
. (19)
for the weight matrix.
Equation (18) points out that geodetic VLBI experiments are usually not a good source for the
accurate detection of ionospheric disturbances from fringe-phase data. Geodetic VLBI sessions are
scheduled in a way that as many as possible sources are tracked at different elevations in order to
separate clock, troposphere and station height (Boehm et al. 2002) within geodetic analysis (Sovers et
al. 1998). Thus, each source is only scheduled to track until a target SNR is reached.
On the one hand, since SNR ∼ √T , weak sources are tracked longer to reach desired SNR limits,
but the fringe-phase scatter is large and it becomes difficult to extract any useful signals from the
data. On the other hand, when a strong source is observed, SNR goals are reached after several tens
of seconds. Although the fringe-phase would be stable enough to detect dispersive effects and residual
intra-scan delay signals, the scan duration would be just too short to conclude on any physical causes.
1.7 Fitting the model parameters
Since Eq. (15) is linear in the unknown parameters Al, Bl, and φn, a least-squares adjustment following
a Gauss-Markov model (e.g., Koch (1997)), using the stochastic model introduced in section 1.6, can
be carried out. Additionally, formal errors of the estimated parameters can be computed and it is
possible to investigate how the different parameters are correlated with each other. All initial values

12 Thomas Hobiger et al.
of the unknowns are set to zero and the o − c (observed minus calculated) vector just contains the
observations, i.e., the fringe-phases from all channels.
2 Ionosphere and TIDs
According to Hargreaves (1992), the ionosphere refers to the ionized part of the atmosphere that
contains significant numbers of free electrons and positive ions that exert a great influence on the
medium’s electrical properties. This means that all radio waves traveling through the ionosphere are
affected by a change in their propagation characteristics. The medium as a whole is electrically neutral
and contains equal numbers of positive and negative charges. Although the charged particles may be
only a minority amongst the neutral ones, they exert a great influence on the medium’s electrical
properties, and herein lies their importance.
Studies of the ionosphere have been carried out for a long time, and most of the characteristics
are now fairly well understood and can be explained by physical and chemical processes of the upper
atmosphere. The Earth’s ionosphere is strongly related to solar activity and the behavior of the geo-
magnetic field. Many measurements have been made using different techniques from locations around
the world, in order to understand the complex relationship that exists between solar conditions, the
geomagnetic field, geographic location, time of day, season, etc.. The most important time and spatial
variations are discussed by, e.g., Hakegard (1995) and the next section summarizes the features of
short-period disturbances that are expected to be detectable from VLBI fringe-phase data.
2.1 Traveling ionospheric disturbances
Traveling ionospheric disturbances (TIDs) manifest themselves as wavelike irregularities in ionospheric
parameters, such as electron density, electron temperature, ion temperature, etc.. Periods are from 10
min to several hours, horizontal wavelengths are between 100 km and several thousand kilometres, and
horizontal speeds are between 100 ms−1 and 1000 ms−1. TIDs with periods of the order of one hour,
wavelengths of the order of 1000 km, and horizontal speeds higher than about 250 ms−1 are called
large-scale TIDs (LSTIDs), while those with periods of several tens of minutes, horizontal wavelengths

Short-period Ionospheric Studies By VLBI 13
of several hundred kilometres, and speeds slower than about 250 ms−1 are called medium-scale TIDs
(MSTIDs).
TIDs have been investigated for more than 50 years, and they are thought to be ionospheric
manifestations of atmospheric gravity waves (AGWs) (e.g., Hunsucker (1982)). In particular, LSTIDs
are considered to be formed from AGWs that are generated in the auroral zone of the Northern and
Southern Hemisphere by energy input from the magnetosphere and propagate towards a lower latitude
region. Hence they are important subjects to clarify the energy flow from the magnetosphere to the
low-latitude ionosphere.
Regarding MSTIDs, some researchers think that they are generated in the auroral zone like LSTIDs,
while some believe that they are phenomena attributed to meteorological processes. AGWs can be
generated from any causes that disturb the atmosphere. TIDs generated by a large earthquake have
been also reported recently (Heki and Ping 2005).
2.2 Plasma bubbles, blobs and ionospheric scintillations
Plasma bubbles, plasma blobs and ionospheric scintillations cause TEC variations that have a time-
scale less than that of TIDs. Plasma bubbles, in which plasma density is lower than that of the ambient
ionosphere, have a spatial scale of about 100 km and drift with the speed of a few 10 ms−1 to 100
ms−1 (e.g., Aarons (1993)). They are sometimes observed as a TEC variation event with a time-scale
of several minutes.
Plasma blobs, in which plasma density is higher than the ambient ionosphere, are events accompa-
nied by the quasi-periodic scintillations, and they produce TEC variations with a time scale of several
to several tens of minutes (Maruyama 1991).
Ionospheric scintillations are more short time-scale phenomena (e.g., Bhattacharyya and Rastogi
(1991)).

14 Thomas Hobiger et al.
3 Detection of short-period TEC variations by VLBI
In this section, it will be shown how VLBI can detect small variations of TEC and how well these
findings agree with GPS measurements. As an example, a scan of the VLBI experiment SYW031 on
August 18th, 2004 on the baseline SYOWA (Antarctica) - HOBART26 (Australia) is taken (Fig. 4).
3.1 VLBI data
Data were obtained in the KOMB format (Takahashi et al. 1991), which contains not only the results of
bandwidth synthesis processing, but also fringe phases and SNR values for each parameter period and
channel. As phases are only measured between 0 and 2π, it might be necessary to unwrap the fringe
phases first, i.e., to carry out phase connection between the individual integrations. A TEC variation
of about 0.8 TECU is equal to 0.5 cycles at S-band, but only one eighth of a cycle in X-band.
As the KOMB data used for this study have an integration period length of 2s, TEC variations of
0.2 TECU/sec are assumed to be detectable when phase unwrapping is done properly. One limitation is
that if the observed sources have low flux densities, thus producing low SNR detections, the intra-scan
phases will show large scatter. As described in section 1.6, geodetic observables can still be obtained
from such sources if the scan is long enough, as the SNR scales by the square root of the scan length.
However, with large scatter in the fringe-phase data, phase unwrapping becomes impossible.
The strong source 1921-293 (unresolved S-band flux 5.4 Jy, unresolved X-band flux 6.2 Jy as
mentioned in VLBA Calibrator list (2005)) was observed on the SYOWA-HOBART26 baseline on
August 18th, 2004 from 10:10:12 UT until 10:14:28 UT. Figure 5 shows the fringe phases for each
channel from that scan. The S-band channels (lower six plots of Fig. 5) reveal a common pattern,
which can also be seen from the X-band channels (upper eight plots of Fig. 5) with lower amplitude.
Dispersive effects, i.e., ionospheric intra-scan delay variations, are assumed to be the reason for this
behavior as dispersive effects scale by ∼ 1/f .
Figure 5 near here
To test the ionospheric signal content, the fringe phases of each channel were scaled by the corre-
sponding reference frequency and the autocorrelation was computed. Figure 6 shows the results of this
simple method, where the curves are displaced by an offset of 0.2 to improve readability. The autocor-

Short-period Ionospheric Studies By VLBI 15
relation functions of the different channels have their local minima and maxima at the same time lags
and they agree well in scale. This means that a common signal can be verified, when each channel is
scaled by its corresponding reference frequency. Thus, the assumption of a rapid ionospheric variation
(which causes dispersive effects over all channels), occurring during that scan can be demonstrated.
Therefore, the fringe phase information of the eight X-band and six S-band channels provides the basis
for separation of the different influences by a least-squares adjustment as described in section 1.4.
Figure 6 near here
Although the variations can be assigned to different physical effects, the parameters are correlated
with each other (Fig. 7). The first columns contain the Bl parameters associated with ∆STEC, followed
by the Al parameters associated with ∆τ and the phase offsets in X- and S-band. It can be seen that
ionosphere variations can be de-correlated from delay changes, but each of them is correlated with the
phase offsets. Whereas the ∆STEC is correlated with S-band phase offsets, the delay variations contain
a correlation with X-band phase offsets. This can be explained by the physical nature of the effects.
As ionospheric influences scale inversely proportional to the frequency, lower frequencies are affected
more than higher ones. Delay changes scale in direct proportion to the frequency and therefore X-band
is more influenced than the S-band.
Figure 7 near here
Finally, it can be stated that X-band (and S-band) phase offsets are highly correlated with each
other, but show no correlation with S-band (X-band) phase offsets. The correlation between parameters
of ∆STEC and ∆τ is mainly due to the same number of parameters for each effect and can be reduced
by choosing longer interval lengths of the B-spline functions. Figure 8 displays the estimated variation
of differential TEC of the scan in TECU. The dashed lines represent the formal error of the adjusted
curve at the 1σ level. The fitted curve has a maximum of 0.4 TECU and a minimum of −0.3 TECU
and reveals two major features that will be useful for validation of the results.
Figure 8 near here
Firstly, the local minimum can be detected around 140s after the scan had started, i.e., at 10:11:52
UT, and secondly the last period-like half-width has a duration of about 100s. The estimated residual
intra-scan delay variations are shown in Fig. 9. One can see that a maximum delay change of only

16 Thomas Hobiger et al.
about 7 picoseconds occurs, which is equal to about 0.36 radians at X-band frequencies. Computing
the correlation coefficient between ∆STEC variations and delay changes gives a value of 0.44.
Fig. 9 near here
In order to prove that the effects are of real nature and not just artifacts caused by the receiving
system, it will be necessary to find other techniques that can reveal the same effect. Therefore, GPS
data were analyzed with respect to TEC variations.
3.2 GPS data
GPS provides a tool for ionospheric-wave disturbance detection based on carrier-phase measurements
of slant TEC (e.g., Afraimovich et al. (2003)). The relation between STEC and carrier-phase measure-
ments carried out on L1 and L2 can be found, e.g., in Hofmann-Wellenhof et al. (2001).
STEC =1
40.308f21 f2
2
f21 − f2
2
[(L1λ1 − L2λ2) + const + nL] (20)
The additional paths of the radio signal (in metres) caused by the ionosphere are expressed by L1λ1
and L2λ2, where L1 and L2 represent the number of phase rotations at frequencies f1 and f2, and λ1
and λ2 stand for the corresponding wavelengths in metres.
The constant represents the unknown initial carrier-phase ambiguity and nL symbolizes errors in
determination of the phase path. If the basic GPS frequency f0 = 10.23 MHz is used, f1 and f2 can
be expressed by (Spilker 1978)
f1 = 154 · f0 f2 = 120 · f0 . (21)
The corresponding wavelengths can be computed, using the speed of light c, which relates frequency to
wavelength by c = λf . The data are usually stored in intervals of 30 seconds (or shorter) and provided
by Receiver Independent Exchange Format (RINEX) files to a broad user community.
In recent years, a lot of stations have been equipped with 1Hz GPS receivers, which makes it
possible to detect short-period disturbances of the ionosphere. Special GPS receivers, dedicated to
ionosphere research, have the ability to record data with sampling rates up to several Hz (Shilo et al.
2000). Carrier-phase measurements can be made very accurately and formal errors of the determined

Short-period Ionospheric Studies By VLBI 17
STEC reach values of 0.01 TECU, if these special receivers are used (Ducic et al. 2003). Even for
geodetic GPS receivers, the error is expected not to exceed 0.1 TECU.
In order to handle GPS observations in RINEX format, the open-source GPSTK software package
(Tolman et al. 2004) was applied. Fortunately, the VLBI stations SYOWA and HOBART26 have co-
located GPS receivers that can be used for comparison. RINEX data at these stations were recorded
in time-steps of 30s, so that eight data-points correspond in time with the VLBI scan.
In order to compare GPS and VLBI STEC measurements, one has to select those satellites as seen
from each station that lie near the source observed in the VLBI scan on the plane of the sky. Thus,
sky-plots for stations SYOWA and HOBART26 were generated, including the tracked GPS satellites
and the radio source at each site (Figs. 10 and 11). At station HOBART26, GPS space vehicles (SV)
14 and 22 are closest to the pointing direction of the antenna (Fig. 10) and at SYOWA the SV 14
fulfills this spatial criterion (Fig. 11).
Figs. 10 and 11 near here
It can be expected that the ionosphere variations detected by VLBI can also be seen from dual-
frequency GPS measurements. Therefore, RINEX data for Internatioanl Global Navigation Satellite
System (GNSS) Service (IGS) station HOB2, which is located close to the VLBI antenna, was down-
loaded, geometry-free phase delay was computed, detrended and transformed into TECU. No signifi-
cant ionospheric variation could be seen around the epoch when the radio telescope was observing the
particular radio source.
The same procedure was applied for IGS station SYOG, which is the GPS receiver of the Antarctic
station Syowa. A strong variation of STEC, similar to that one observed by VLBI, can be detected by
GPS (Fig. 12).
Fig. 12 near here
3.3 Interpretation of the results
Other GPS signals than the one from SV 14 do not reveal the same pattern (SVs 7, 11, 28, 31), are
too noisy (SV 9), or have too many cycle slips (SV 20). Therefore, precise information about traveling

18 Thomas Hobiger et al.
speed and propagation direction cannot be obtained. Nevertheless, several features of the ionospheric
disturbance can be deduced from VLBI and single GPS satellite observations:
1. A main feature of the ionospheric disturbance can be deduced from the VLBI and GPS results
(Figs. 8 and 12). The signature is detected first in the GPS signal and shows a time-delay ∆T of
about 240s before it affects the VLBI measurement.
2. Since VLBI and SV 14 are approximately oriented in the same azimuth (Fig. 11), we can use the
following formula to calculate the distance D between the intersection points of the rays with an
ionospheric shell at height H
D = (Re + H) ·[zv − zg − arcsin
(Re
Re + Hsin zv
)+ arcsin
(Re
Re + Hsin zg
)](22)
Figure 13 shows the basic geometry where Re represents the radius of a spherical Earth (6371km),
and zv and zg are the zenith distances (in radians) from VLBI and GPS measurements. When the
height of the disturbance is assumed to be at 250km, the spatial distance between the different
intersection points will be 246km. If the height is changed to H = 500km, the distance and the
follow on calculations of propagation speed will increase by about 50%. Since 250km represents an
average height at which ionospheric disturbances occur, we have chosen it for our further analysis.
3. Since VLBI and GPS measurements are aligned in a plane, we can compute the upper limit for an
estimate of the propagation speed by vmax = D/∆T , which is equal to the true velocity v when
the disturbance propagates exactly in the azimuth direction in which the antenna (and the GPS
satellite) points. Thus, we obtain v < vtextmax = 1028ms−1, which is in good agreement with recent
findings of fast-traveling disturbances (Hawarey 2006). The true propagation direction can scale
v proportional to ∼ vtextmax cosβ, where β represents the difference between the azimuth of the
propagation direction and the azimuth of the observation.
4. Since the disturbance is seen first in the GPS measurements before it affects the radio signals
received by the VLBI antenna, southward propagation direction can be assumed.
5. The amplitude measured by VLBI is slightly larger than that measured by GPS. This can be
explained by the fact that the VLBI observation is carried out at a lower elevation angle, which
causes a longer ray path through the ionosphere and thus a higher STEC value. The scaling between
the results can be explained well by ionosphere mapping functions (Schaer 1999).

Short-period Ionospheric Studies By VLBI 19
6. A comparison of the VLBI and GPS STEC time-series reveals a difference in the duration of the two
sets of variations. By definition, the VLBI variations last about 250s, while the corresponding GPS
variation spans 320s. Considering that VLBI source motion follows East-West direction and the
GPS satellite is moving from North-West to South-East, having a West-East component helps to get
deeper understanding of the observed feature. Considering this and assuming a velocity component
v⊥ = 630ms−1 perpendicular to the azimuth direction could explain the different time-scales of the
variations as seen by VLBI and GPS.
Thus, a short period ionospheric disturbance propagating with a speed of ≤ 1000ms−1 is the
most likely explanation for the phase variations measured at SYOWA by VLBI and GPS. Considering
that location and the epoch of observation (10 UT) leads to the conclusion that the disturbance
originated around the auroral oval. Measurements of energetic auroral electrons (Fig. 14) encourage
this explanation.
Solar flux at 10.7cm (F10.7) and the terrestrial Kp index (SEC-NOAA 2006) show no clear hint
that explains the occurrence of this event. The day of the observation was magnetically quiet, but only
the interplanetary magnetic field (SEC-NOAA 2006) showed some evidence for a disturbance. The
International Magnetic Field (IMF) was directed southward before the measurements were carried out,
which permits interaction between the auroral ovals and the solar wind. Considering the dimension of
the event and the travelling speed, plasma patches are assumed to be the likely cause of the STEC
variations measured by VLBI and GPS. Propagation speed, time and location of the event agree well
with the characteristics of plasma patches as described by Ma and Schunk (2001).
4 Possible fields of application and requisites
It has been shown that VLBI is able to detect small, rapid variations of the ionosphere with a high time
resolution as the sampling rate of fringe phases is equal to the integration period (here 2s). As discussed
in section 1.6, strong sources are necessary to ensure high SNR in order to enable phase connection
and/or phase unwrapping. With such sources, it should be possible to detect all TEC variations of the
ionosphere, provided that the scan is long enough.

20 Thomas Hobiger et al.
Since VLBI is a differential technique, time-dependent variations of ∆STEC cannot be clearly
assigned to a single station without external information (like GPS in the example here) or other mea-
surements. However, if two baselines connect one station, one can compute the ionospheric variations
from both measurements and check whether the same signals can be found.
VLBI has the large advantage that fringe phase information is very precise and that the formal error
of each measurement can be derived easily from the corresponding correlation amplitude. Therefore,
one can think of the following applications:
– Detection of TIDs.
– Detection of plasma bubbles (Sitnov et al. 2005).
– Monitoring diurnal TEC variations with high precision by VLBI experiments.
– Detection of ionospheric disturbances caused by earthquakes, tsunamis or rocket launches.
– Verifying the different reactions of the ionosphere to solar excitations and geomagnetic disturbances.
Besides applications specifically geared towards studying the ionosphere itself, the method de-
scribed in this paper would also provide a basis for handling intra-scan delay variations and providing
phase delay, which is at least one magnitude more precise than current group delay measurements, for
geodetic/astrometric purposes or for the navigation of spacecraft.
Acknowledgements We are very grateful to the Austrian Science Fund (FWF), which funded the research
project P16136-N06 ”Investigation of the ionosphere by geodetic VLBI”. Furthermore, we want to thank
the Japanese Society for the Promotion of Science, JSPS (projects PE04023 and P06603) for supporting
our research. The International VLBI Service for Geodesy and Astrometry (IVS), International GNSS Service
(IGS), and our colleagues from Kashima Space Research Center and Geographical Survey Institute (Japan) are
acknowledged for providing data. The Space Environment Center, US National Oceanographic and Atmospheric
Administration (NOAA) is acknowledged for providing space weather data and for release of Fig. 14. The
authors are grateful to Bob Campbell and Brian Corey for their critical comments and helpful suggestions,
which improved the manuscript greatly.
References
Aarons J (1993) The longitudinal morphology of equatorial F-layer irregularities relevant to their occurrence,
Space Science Reviews, 63(3/4), 209-243.

Short-period Ionospheric Studies By VLBI 21
Afraimovich EL, Kosogorov EA, Palamarchouk KS, Perevalova NP, Plotnikov AV (2000) The use of GPS arrays
in detecting the ionospheric response during rocket launchings, Earth Planets Space, 52(11), 1061-1066.
Afraimovich EL, Perevalova NP, Voyeikov SV (2003) Traveling wave packets of total electron content distur-
bances as deduced from global GPS network data, Journal of Atmospheric and Solar-terrestrial Physics,
65(11), 1245-1262.
Afraimovich EL, Astafieva EI, Voyeikov SV (2004) Isolated ionospheric disturbance as deduced from global
GPS network, Annales Geophysicae, 22(1), 47-62, SRef:1432-0576/ag/2004-22-47.
Bhattacharyya A, Rastogi RG (1991) Structure of ionospheric irregularities from amplitude and phase scintil-
lation observations, Radio Science, 26, 439-449.
Boehm J, Schuh H, Weber R (2002) Influence of tropospheric zenith delays obtained by GPS and VLBI
on station heights. In: Vertical Reference Systems, H. Drewes,A.H. Dodson,L.P.S. Fortes, L. Sanchez, P.
Sandoval (Eds.), IAG Symposia Vol. 124, 107-112, Springer, Berlin, Heidelberg, New York.
Budden KG (1985) The propagation of radio waves, Cambridge University Press, Cambridge.
Ducic V, Artru J, Lognonne P (2003) Ionospheric remote sensing of the Denali Earthquake Rayleigh surface
waves, Geophysical Research Letters, 30(18), 1951-1958, doi:10.1029/2003GL017812.
Hakegard O (1995) A regional ionospheric model for real-time predictions of the total electron content in wide
area differential satellite navigation systems, PhD Thesis, Norwegian Institute of Technology, Norway.
Hargreaves JK (1992) The solar-terrestrial environment,Cambridge University Press, Cambridge.
Hawarey M (2006) Travelling ionospheric disturbance over California mid 2000, Journal of Nonlinear Processes
in Geophysics, 13 (1-), SRef-ID: 1607-7946/npg/2006-13-1, 2006.
Heki K, Ping J (2005) Directivity and apparent velocity of the coseismic ionospheric disturbances observed with
a dense GPS array, Earth and Planetary Science Letters, 236(3-4), 845-855, doi:10.1016/j.epsl.2005.06.010.
Hobiger T, Kondo T, Schuh H (2006) Very long baseline interferometry as a tool to probe the ionosphere,
Radio Sci., 41, RS1006, doi:10.1029/2005RS003297.
Hobiger T (2006) VLBI as a tool to probe the ionosphere, PhD thesis, Vienna University of Technology, pub-
lished under: Schriftenreihe der Studienrichtung Vermessung und Geoinformation, Technische Universitaet
Wien, ISSN 1811-8380.
Hofmann-Wellenhof B, Lichtenegger H, Collins J (2001) Global Positioning System - Theory and Practice, 5th
ed, Springer, Berlin, Heidelberg, New York.
Hunsucker RD (1982) Atmospheric gravity waves generated in the high-latitude ionosphere: A review, Rev.
Geophys., 20(2), 293-315.
Jacobson AB, Erickson WC (1993) Observations of electron-density irregularities in the plasmasphere using
the VLA radio-interferometer. Annales de Geophysique, 11, 869-73.
Kassim NE, Perley RA, Erickson WC, Dwarakanath KS (1993) Subarcminute resolution imaging of radiosources
at 74 MHz with the very large array, Astron. J., 106, 2218-2228.

22 Thomas Hobiger et al.
Koch KR (1997) Parameter Estimation and Hypothesis Testing in Linear Models, Springer, Berlin, Heidelberg,
New York.
Kondo T, Kimura M, Koyama Y, Osaki H (2004) Current Status of Software Correlators Developed at Kashima
Space Research Center, International VLBI Service for Geodesy and Astrometry 2004 General Meeting
Proceedings, NASA/CP-2004-212255, 186-190.
Koyama Y, Kondo T, Osaki H, Whitney AR, Dudevoir KA (2005) Rapid Turnaround EOP Measurements
by VLBI over the Internet,Sanso F (ed), A Window on the Future of Geodesy, 119-124, Springer, Berlin,
Heidelberg, New York.
Ma T, Schunk RW (2001) The effects of multiple propagating plasma patches on the polar thermosphere,
Journal of Atmospheric and Solar-Terrestrial Physics, 63(4), 355-366, doi:10.1016/S1364-6826(00)00181-4.
Maruyama T (1991) Observations of quasi-periodic scintillations and their possible relation to the dynamics
of ES plasma blobs, Radio Science, 26, 691-700.
Ogden RT (1997) Essential Wavelets for Statistical Applications and Data Analysis, Birkhauser, Boston.
Petrov L (2000) Instrumental Errors of Geodetic VLBI, in International VLBI Service for Geodesy and Astrom-
etry 2000 General Meeting Proceedings, Vandenberg NR and Baver KB (eds.), NASA/CP-2000-209893.
Ray JR, Corey BE (1991) Current Precision of VLBI Multi-Band Delay Observables, Proceedings AGU Chap-
man Conference on Geodetic VLBI: Monitoring Global Change, Washington D.C., 22-26 April.
Roberts DH, Klobuchar JA, Fougere PF, Hendrickson DH (1982a) A large-amplitude traveling ionospheric
disturbance produced by the May 18, 1980, explosion of Mount St. Helens, Journal of Geophysical Research,
87, 6291-6301.
Roberts DH, Rogers AEE, Allen BR, Bennett CL, Burke BF, Greenfield PE, Lawrence CR, Clark T (1982b)
Radio interferometric detection of a traveling ionospheric disturbance excited by the explosion of Mount
St. Helens, Journal of Geophysical Research, 87, 6302-6306.
Schaer S (1999) Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System, Ph.D.
thesis, Bern University.
Schmidt M (2001) Basis principles of wavelet analysis and applications in geodesy (in German), Post-doctoral
thesis, Shaker, Aachen, Germany.
Space Environment Center, Boulder, CO, National Oceanic and Atmospheric Administration, US Dept. of
Commerce (2006) http://www.sec.noaa.gov/index.html
Shilo NM, Essex EA, Breed AM (2000) Ionospheric Scintillation Study of the Southern High Latitude Iono-
sphere, WARS’00- Workshop on the Applications of Radio Science, National Committee for Radio Science,
Australia, 154-159.
Sitnov MI, Guzdar PN, Swisdak M (2005) On the formation of a plasma bubble, Geophysical Research Letters,
32(16103), doi:10.1029/2005GL023585.

Short-period Ionospheric Studies By VLBI 23
Sovers OJ, Fanselow JL, Jacobs CS (1998) Astrometry and geodesy with radio interferometry: experiments,
models, results., Reviews of Modern Physics, 70(4), 1393-1454.
Spilker JJ (1978) GPS Signal Structure and Performance Characteristics, Journal of Navigation, 25(2), 121-146.
Stollnitz EJ, DeRose TD, Salesin DH (1995) Wavelets for computer graphics: A primer, part 2, IEEE Computer
Graphics and Applications, 15(4), 75-85.
Takahashi Y, Hama S, Kondo T (1991) K-3 software system for VLBI and new correlation processing software
for K-4 recording system, Journal of the Communications Research Laboratory, 38(3), 481-502.
Takahashi F, Kondo T, Takahashi Y, Koyama Y (2000) Very Long Baseline Interferometer, Ohmsha, Japan.
Thompson AR, Moran JM, Swenson GW (2001) Interferometry and Synthesis in Radio Astronomy, John Wiley
& Sons, New York.
Tolman B, Harris RB, Gaussiran T, Munton D, Little J, Mach R, Nelsen S, Renfro B, Schlossberg D (2004)
The GPS Toolkit – Open Source GPS Software, Proceedings of the 17th International Technical Meeting
of the Satellite Division of the Institute of Navigation, ION GNSS 2004, 2044-2053.
VLBA Calibrator list (2005), Version Dec 15, 2005, http://www.vlba.nrao.edu/astro/calib/vlbaCalib.txt.
Zensus JA, Diamond PJ, Napier PJ (eds.) (1995) Very Long Baseline Interferometry and the VLBA, ASP
Conference Series Vol. 82, Astronomical Society of the Pacific, San Francisco, ISBN 1-886733-02-3.
24 Thomas Hobiger et al.
Fig. 1 VLBI signal flow.
Fig. 2 Typical channel distribution of a geodetic VLBI experiment (the video channel bandwidth is not to
scale)
0
0.2
0.4
0.6
0.8
1
0 20 40 60 80 100 120
N2 i (
t)
t [arbitrary unit]
Fig. 3 Display of all scaling functions N2i (t) for t ∈ [0, 120], using an equidistant interval width of 10.

Short-period Ionospheric Studies By VLBI 25
Fig. 4 Baseline SYOWA (Antarctica) - HOBART26 (Australia); Lambert conic conformal projection.
6
4
2
0 200 100 0
8.21099 GHz
6
4
2
0 200 100 0
8.22099 GHz
6
4
2
0 200 100 0
8.25099 GHz
6
4
2
0 200 100 0
8.31099 GHz
6
4
2
0 200 100 0
8.42099 GHz
6
4
2
0 200 100 0
8.50099 GHz
6
4
2
0 200 100 0
8.55099 GHz
6
4
2
0 200 100 0
8.57099 GHz
6
4
2
0 200 100 0
2.20799 GHz
6
4
2
0 200 100 0
2.21299 GHz
6
4
2
0 200 100 0
2.22799 GHz
6
4
2
0 200 100 0
2.25799 GHz
6
4
2
0 200 100 0
2.28299 GHz
6
4
2
0 200 100 0
2.29299 GHz
Fig. 5 Fringe phases (0 . . . 2π) on baseline SYOWA-HOBART26 from experiment SYW031, August 18th, 2004
from 10:10:12 UT until 10:14:28 UT, having an integration period of 2s.

26 Thomas Hobiger et al.
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
0 50 100 150 200 250
time [s]
Frequency [Hz]8.21099e+098.22099e+09 8.25099e+098.31099e+098.42099e+098.42099e+098.50099e+098.57099e+092.20799e+092.21299e+092.22799e+092.25799e+092.28299e+092.29299e+09
Fig. 6 Autocorrelation of the fringe-phase information, scaled by reference frequency. Individual channels are
offset by 0.2 to improve legibility.
0
0.2
0.4
0.6
0.8
1
off.Soff. Xτ∆STEC
off.S
off. X
τ
∆STEC
Fig. 7 Absolute values of the correlation coefficients between the estimated parameters.

Short-period Ionospheric Studies By VLBI 27
-0.4
-0.2
0
0.2
0.4
0.6
0 50 100 150 200 250
∆ S
TE
C [T
EC
U]
time [s]
Fig. 8 Intra-scan variation of ∆STEC in TECU on August 18th, 2004 from 10:10:12 UT until 10:14:28 on the
baseline SYOWA-HOBART26. Formal error at 3σ level is displayed by dashed lines.
-0.01
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0.01
0 50 100 150 200 250
τ [n
s]
time [s]
Fig. 9 Intra-scan variation of τ in nanoseconds on August 18th, 2004 from 10:10:12 UT until 10:14:28 on the
baseline SYOWA-HOBART26. Formal error at 3σ level is displayed by dashed lines.

28 Thomas Hobiger et al.
90
75
60
45
30
15
15
30
45
60
75
90
907560453015153045607590
1921-293
SV 01SV 03SV 09SV 11SV 14SV 15SV 18SV 19SV 22SV 25
Fig. 10 Sky-plot for station HOBART26 (asterisks denote GPS satellites, the cross indicates the direction to
the radio source).
90
75
60
45
30
15
15
30
45
60
75
90
907560453015153045607590
1921-293
SV 07SV 09SV 11SV 14SV 20SV 28SV 31
Fig. 11 Sky-plot for station SYOWA (asterisks denote GPS satellites, the cross indicates the direction to the
radio source).

Short-period Ionospheric Studies By VLBI 29
-0.4
-0.2
0
0.2
0.4
0.6
-300 -200 -100 0 100 200
ST
EC
[TE
CU
]
time [s]
Fig. 12 STEC at station SYOG, computed between receiver and GPS SV 14. The dashed line represents the
observed STEC from VLBI, which is shifted and scaled in order to compensate for the geometry (see discussion
in section 3.3). One has to bear in mind that GPS data is obtained every 30s.
Fig. 13 Description of the geometric situation for the computation of the propagation speed of the ionospheric
disturbance. Re represents the radius of a spherical Earth (6371km), H the height of the ionospheric layer and zv
and zg are the zenith distances (in radians) from VLBI and GPS measurements. The corresponding geocentric
angle αv can be computed by αv = zv − arcsin(
ReRe+H
sin zv
). The angle αg is obtained in the same way.

30 Thomas Hobiger et al.
Fig. 14 The display of the statistical auroral oval (color-coded to the bar on the right hand side in erg cm−2
s−1) includes a presentation of the actual auroral energy input observations that were used to estimate the
hemispheric power and the level of auroral activity. This presentation shows the track of NOAA-17 (one of the
series of polar orbiting meteorological satellites) over the polar region. The length of the solid line indicates
that amount of energy into the atmosphere that was observed at that point along the satellite track. The scales
in the four corners of the plot may be used to convert the line length to actual energy flux. The length of the
dotted line is an indication of the energy of the electrons that are flowing into the atmosphere to produce the
aurora. A line of two dots represents a very low energy of about 100 eV, a length of 16 dots a high energy.
Both the solid and dotted lines are plotted every 16s or about 100km along the satellite track (on courtesy of
NOAA).





























