Embed Size (px)
DESCRIPTION
電機制御工学 定性的制御編. 清弘 智昭. 自動制御の種類. 定量的制御 フィードバック制御 (Feed Back Control) 対象とする系の出力(温度,速度,位置など)をある目標値にする制御。 定性的制御 シーケンス制御 対象とする系の状態(オン・オフなど)を,あらかじめ定められた順序に従って段階を進めていく制御。. フィードバック制御. 定値制御 レギュレータ (Regulator) 目標値を一定に保つ 追値制御 サーボ (Servo) 目標値に追随する. 制御量. 誤差信号. 操作量. 目標値. 比較部. 制御部. 制御対象. - PowerPoint PPT Presentation
Citation preview

電機制御工学定性的制御編
清弘 智昭

自動制御の種類
定量的制御 フィードバック制御 (Feed Back Control) 対象とする系の出力(温度,速度,位置など)をある目標値に
する制御。
定性的制御 シーケンス制御 対象とする系の状態(オン・オフなど)を,あらかじめ定めら
れた順序に従って段階を進めていく制御。

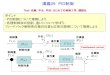
フィードバック制御
定値制御 レギュレータ (Regulator) 目標値を一定に保つ 追値制御 サーボ (Servo) 目標値に追随する
制御部比較部 制御対象
検出部
目標値 (Desired Value,Reference) 定量的な制御命令
偏差 (Deviation) ,誤差 (Error) 目標値と制御量との差
制御量 (Controlled Variable) 目的とする状態
目標値 誤差信号 操作量 制御量
フィードバック信号

定性的制御
シーケンス制御 (Sequential Control)
シーケンス制御の構成
命令処理部 制御装置 制御対象
検出部
制御命令
操作信号
制御信号
状態

シーケンス制御の分類
時限プログラム制御 順序プログラム制御
条件制御
時間で制御が進行する。 例:交通信号
外部のセンサや内部の状態の変化に従って制御が進行する。 例:全自動洗濯機
入力と内部状態の組み合わせで制御が決定される。例:エレベータの行き先階の決定法

命令処理部
シーケンス制御の設計は命令処理部の設計が主となる
命令処理部の構成要素
有接点
無接点
電磁リレー (Relay: 継電器とも呼ぶ )電磁接触器
半導体個別素子 トランジスタ, IC 等プログラマブル・コントローラ(シーケンサ)マイクロプロセッサ
プログラマブルコントローラ

電磁リレーの動作
バネに引かれて可動鉄片は上に押される。 共通とb接点が導通する。
コイルに電流を流さない
可動鉄片は電磁石(コイル)に引きつけられる。 共通と a 接点が導通する。
導通導通
コイルに電流を流す
a 接点
b 接点共通 共通

電磁リレーの記号

電磁リレーの働き
電磁リレーの接点 a 接点 コイルが ON で ON になる NO (Normally Open), Make 接点 b 接点 コイルが ON で OFF になる NC (Normally Closed), Break 接点
電磁リレーの働き 絶縁 コイルと接点は完全に離れている。 入力と出力の共通端子(接地)は存在しない。 論理の反転 コイルの電流 OFF でb接点は ON コイルの電流 ON でb接点は OFF 回路数の増加 1 個のコイルで複数の接点を ON-OFF できる。 増幅 小さなコイル電流で大電流容量の接点を ON - OFF できる
簡略記号
a 接点 b 接点

電磁リレーのコイルと接点の対応付け
コイルと対応する接点を点線で結ぶリレーの個数が多くなるとわかり難い
コイルを大文字のアルファベットで示し,対応する接点にどのコイルの接点なのかを示す
コイルを大文字,接点を小文字にする場合もある

電磁接触器
小型の電磁接触器
大型で制御する電力が大きいものは電磁接触器と呼ばれている。
電磁接触器の記号は下図のようになる。

タイマ
タイマの外観
遅延動作 遅延復帰 遅延
入力信号が変化時より,ある一定時間だけ遅れて出力が変化するリレー。
a 接点b 接点

保護リレー
手動復帰接点を持つ動作した後は自動的には戻らない(原因を修復した後手動で復帰させる)
コイルに過電流が流れたとき動作し,接点を OFF にして回路を遮断するリレー
保護リレー
手動復帰接点の記号
OCR (Over Current Relay)

シーケンス制御で用いられる器具と記号1
手動スイッチ類a 接点 b 接点
a 接点 押さない時は OFF で,押すと ON になる接点
b 接点 押さない時は ON で,押すと OFF になる接点

シーケンス制御で用いられる器具と記号2
リミットスイッチ機械的な外力で動作するスイッチ。人間が操作するスイッチ,リレーの接点
リミットスィッチの記号
a 接点b 接点
リミットスイッチではない

シーケンス制御の基本回路
ラダ-ネットワーク (はしごのようになっているので)
yxf
yxf
xf
AND
OR
NOT
f
f
f
x y
x
y
x
両方 ON にならないとコイルに電流が流れない
どちらかが ON になるとコイルに電流が流れる
接点が押されるとコイルに流れていた電流が OFF になる
F
F
F
両側の線は電源

自己保持回路の動作
自己保持回路 セットスイッチを押すと出力はセットされ,スイッチを離してもその状態を保つ回路。リセットスイッチを押すまでその状態を保つ。
セットスイッチ
リセットスイッチ
最初の状態 両方のスイッチは押されていない。 セットスイッチ OFF リセットスイッチ ON リレーのコイルは OFF
セットスイッチを押す セットスイッチ ON リセットスイッチ ON リレーのコイルに電流が流れる
セットスイッチを押す セットスイッチ O
N リセットスイッチ
ON コイルに電流が流れる
リレーの接点 ON
セットスイッチを離す セットスイッチ O
FF リセットスイッチ
ON コイルに電流が流れる
リレーの接点 ON
接点を通してコイルに電流が流れつづける
リセットスイッチを押す セットスイッチ
OFF リセットスイッチ
OFF コイルの電流が切れる
リセットスイッチを押す セットスイッチ
OFF リセットスイッチ
OFF コイルの電流が切れる
リレーの接点 OFF
リセットスイッチを離す セットスイッチ OFF リセットスイッチ ONセットスイッチが OFF なのでコイルには電流が流れない

自己保持回路の動作1
セットスイッチ
リセットスイッチ
最初の状態 両方のスイッチは押されていない。 セットスイッチ OFF リセットスイッチ ON リレーのコイルは OFF
自己保持回路 セットスイッチを押すと出力はセットされ,スイッチを離してもその状態を保つ回路。リセットスイッチを押すまでその状態を保つ。

自己保持回路の動作2
セットスイッチを押す セットスイッチ
ON リセットスイッチ
ON コイルに電流が流れ
る
リレーの接点 ON
セットスイッチを押す セットスイッチ ON リセットスイッチ ON リレーのコイルに電流が流れる
セットスイッチ
リセットスイッチ

自己保持回路の動作3
リセットスイッチを押す
セットスイッチ OFF
リセットスイッチ OFF
コイルの電流が切れる
セットスイッチを離す セットスイッチ
OFF リセットスイッチ
ON コイルに電流が流れ
る
セットスイッチ
リセットスイッチ
リレーの接点 ON
接点を通してコイルに電流が流れつづける

自己保持回路の動作4
リセットスイッチを離す セットスイッチ OFF リセットスイッチ ONセットスイッチが OFF なのでコイルには電流が流れない
リセットスイッチを押す セットスイッチ
OFF リセットスイッチ
OFF コイルの電流が切れる
リレーの接点 OFF
セットスイッチ
リセットスイッチ

自己保持回路の種類
リセット優先自己保持回路 スイッチS と R を同時に ON にするとRの方が優先される
f
s
Fr
f
セット優先自己保持回路 スイッチS と R を同時に ON にするとSの方が優先される
f
s
Fr f

シーケンス制御の例1
揚水ポンプ
ポンプ運転開始の条件 タンク内の水が無くなり LSL が押されなくなったとき
ポンプ停止の条件 タンクが満水になって LSU が押されたとき
LSL で自己保持回路 セット, LSU で自己保持回路 リセット

揚水ポンプの設計 運転
停止
ms
M
r セット部 ON で自己保持はセットされる
LSLが押されなくなったら ON b接点
リセット部 OFF で自己保持回路リセットLSUが押されたら OFF b接点
セット部リセット部
m
m
Mm
LSU-bLSL -
b

シーケンス制御の例2
誘導電動機の Y- Δ起動起動時に大きな突入電流が流れる
コイルに印加する電圧を下げる
運転時( Δ接続) 起動時(Y接続)
v vv 3v
v
Y接続にするとコイルに印加される電圧は になる
31

3相誘導電動機の Y-Δ起動
電磁接触器( MC) とコイルの配線 タイムチャート
Y 結線用MC
Δ結線用MC
Y 運転Δ運転
STBSPBxTM
MCYMCD
STB :スタートボタン x:補助リレーSPB: ストップボタン
TM: タイマリレーMCY:Y 結線用MCMCD:Δ結線用MC
T
TMxTMx

誘導電動機の Y-Δ起動
ラダ - ネットワークの設計aSTB
X
x
bSPB
1. STB でセット, SPB でリセットの自己保持を作る
2.Xでタイマを起動
TMx
3.MCYと MCDの回路を作る
MCDTMxMCY MCYと MCDが同時に ON にならないようにする
MCYTMxMCD
X
x
bSPB aSTB
TMx
xMCY
MCDbMCD
bMCY
bTM
aTM

シーケンス制御の表現法
1. タイムチャートY- Δ起動の項参照
2. フローチャート3. ラダー図 直接ラダー図で表現4. 状態遷移図
開 始
LSL=ON
モータ ON
LSU=OFF
モータ OFF
Y
Y
端記号(開始・終点など)
条件判断
処理
モータON
モータOFF
LSU=OFF
LSL=ON
LSU=ON LSL=OFF

シーケンス回路の設計法1
タイムチャートなどから直接ラダ-図を作る揚水ポンプ, Y- Δ起動などの設計例
同期順序回路の設計手法を用いる(電磁リレーは不可)
入力論理回路
FF群出力論理回路
FF群の出力と入力から次の状態を作っておく
入力
00
0110
たとえば状態 00の時,入力論理回路で次の状態 01 を作っておく。すると次のクロックで FF群はこの 01を読み込んで 01 になる。
クロック

同期順序回路によるシーケンス制御の設計
揚水ポンプ制御装置の設計
モータON
モータOFF
LSU=1
LSL=0
LSL=0/1LSU=0
LSL=1LSU=0/1
LSU,LSLが押されているとき「1」
出力はモータ M ,1つだけなので FFは1個
前の状態 m とクロック入力後の状態Mおよび入力の関係を示すと左のようになる。
M LSL LSU M’ 0 0 0 1 0 0 1 X 0 1 0 0 0 1 1 0 1 0 0 1 1 0 1 X 1 1 0 1 1 1 1 0×は存在しない状態を表す
上の真理値表からカルノー図を描いて入力論理回路を作る

同期順序回路2
カルノー図を描いて論理式を求める
00 01 11 100 1 X 1 1 X 1
LSL LSU
M
LSL MLSU
入力論理回路完成した同期順序回路

シーケンス回路の設計法3
非同期順序回路の設計手法をもちいる
非同期順序回路出力が入力側にフィードバックされているディジタル回路。出力 と入力 は最終的には等しくならなければならない。
等しい状態 安定 等しくない状態 不安定(過渡状態)
nxx 1 nXX 1
nXX 1
nxx 1
nXX 1
nxx 1
Δ Δ
安定 不安定 安定 不安定

非同期順序回路の解析
SRフリップ・フロップの解析
S
R
1G
2G1g
2g
論理式
RgG
SgG
12
21 大文字は出力小文字は入力
論理式から遷移表を作る外部入力 は横内部入力 は縦枠の内部に出力 を書く
出力は論理式から求める。 は または のとき1 は または のとき1
RS ,21, gg
21,GG
1G
2G
1S 02 g
1R
01 g
01 g

非同期論理回路の解析2
RS ,
21, gg
00 01 11 1000 11 11 11 1101 01 01 11 1111 00 01 11 1010 10 11 11 10
と が等しいと安定であるから丸をつける
外部入力 が変化したとき出力 がどのように変化するかを調べる
21, gg21,GG
21,GG
RS ,21,GG
RS ,
21, gg
00 01 11 1000 11 11 11 1101 01 01 11 1111 00 01 11 1010 10 11 11 10
最初黄色の状態にあったときSR が 10になったらどうなるだろうか入力を変化させて SR=10に移動するそこは 11 で不安定なので縦方向に移動する。どこへ?この 11 が次の内部入力となるので, g1g2が 11 の場所に移動する
ここも不安定なので, g1g2が 10の場所に移動する安定なのでここに落ち着く

非同期順序回路で揚水ポンプを設計する 1
出力は M 1つ入力は 外部 LSL, LSU 内部 m
遷移表を作る 入力は2なので列数は 22= 4 出力は1なので行数は2 1=2
00 01 11 10
0
1
LSU LSL
m遷移図より遷移表を作る
出力M
入力

非同期順序回路で揚水ポンプを設計する2
1. モータ OFF , LSU LSL=01 の時を開始点とする。この時には安定なので丸をつける。
2. 水位が下がって LSL=0になると左に移動する。この時ポンプを起動する必要があるので不安定で下に移動。
3. ポンプ起動で安定。貯水槽に水が入ると再び LSL =1になるので④に移動する。
4. さらに貯水槽の水位が上がって満水になると LSU=1 になる。
5. 満水なのでポンプを停止させる。そのためには不安定でなければならない。
6. ポンプ停止状態で安定。再び起動するのは LSU LSL=00になったとき。
モータON
モータOFF
LSU=1
LSL=0
LSL=0/1LSU=0
LSL=1LSU=0/1
LSU,LSLが押されているとき「1」
00 01 11 10
0 2 ① ⑥
1 ③ ④ 5
LSU LSL
m
重 要遷移表において,入力が変化した時には横方向へ,出力が変化する時には縦方向に移動する。

非同期順序回路で揚水ポンプを設計する 1
出力は M 1つ入力は 外部 LSL, LSU 内部 m
遷移表を作る 入力は2なので列数は 22= 4 出力は1なので行数は2 1=2
00 01 11 10
0
1
LSU LSL
m遷移図より遷移表を作る
出力M
入力

非同期順序回路で揚水ポンプを設計する2
1. モータ OFF , LSU LSL=01 の時を開始点とする。この時には安定なので丸をつける。
2. 水位が下がって LSL=0になると左に移動する。この時ポンプを起動する必要があるので不安定で下に移動。
3. ポンプ起動で安定。貯水槽に水が入ると再び LSL =1になるので④に移動する。
4. さらに貯水槽の水位が上がって満水になると LSU=1 になる。
5. 満水なのでポンプを停止させる。そのためには不安定でなければならない。
6. ポンプ停止状態で安定。再び起動するのは LSU LSL=00になったとき。
モータON
モータOFF
LSU=1
LSL=0
LSL=0/1LSU=0
LSL=1LSU=0/1
LSU,LSLが押されているとき「1」
00 01 11 10
0 2 ① ⑥
1 ③ ④ 5
LSU LSL
m
重 要遷移表において,入力が変化した時には横方向へ,出力が変化する時には縦方向に移動する。

非同期順序回路で揚水ポンプを設計する3
00 01 11 10
0 2 ① ⑥
1 ③ ④ 5
LSU LSL
m
00 01 11 10
0 1 0 0 ×
1 1 1 0 ×
LSU LSL
m
1. 安定な部分は M と m が等しい,すなわちM は横の値と等しくなる。不安定な場合は,縦方向の移動先と同じになるのでその値を表に書き込む。また,何もない部分は ×を書き込んでおく。
2. 遷移マトリックスはカルノー図と同じなので,簡単化した式を書き出す。
mLSU LSLLSU mLSLLSU
mLSULSLLSUM

自動ボール盤の設計1
自動ボール盤の動作

自動ボール盤の設計2
1 スタートボタン SB を押す
被加工物(ワーク)を固定するため油圧バルブ V cを ON にする。

自動ボール盤の設計3
2 主軸を降下させる(急速降下)
ワークが固定(クランプ)されてリミットスイッチ LS1 が押されたら主軸上下用バルブの降下用ソレノイドを駆動する。主軸が降下すると LS2は離れる。
主軸

自動ボール盤の設計4
3 主軸を降下させる(加工速度降下)
LS3はドリルが被加工物の直前まできたら押される。ここからは穴開け加工をするために主軸をゆっくり降下させると共に,ドリルを回転させる。そのため,緩降下バルブのソレノイドと主軸駆動モータを ON にする。
ドリル

自動ボール盤の設計5
4 主軸を上昇させる(モータ回転)
ドリルの先端が規定の穴の深さに達すると, LS4がオンになるので主軸を上昇させる。ドリルがワークの中に残っている間は主軸を回転させておく必要があるので,モータは ON のままである。

自動ボール盤の設計6
5 主軸を上昇させる(モータ停止)
加工をしていなくても,摩擦などを減らすため,ドリルがワークの中に残っている間は主軸を回転させておく必要がある。 LS3が押された時にはドリルの先端はワークの外に出ているのでモータを停止させる

自動ボール盤の設計7
6 クランプを解除する
主軸が完全に上がりきって LS2が押されると穴あけ作業は終了したので, Vc を OFF にして,ワークのクランプを解除する。すると LS1 は押されなくなり,最初の状態に戻る。

自動ボール盤の設計8
設計のポイントタイムチャートを見て作りやすいところから手をつける
1. Vu は LS4でセット, LS2でリセットの自己保持で実現できる。2. Vs は LS3でセットして, LS4でリセットするが,ステップ5で再びセットされないように LS3を Vu で禁止する。
3. M は LS3かつ Vd の時にセットする。またりセットは LS3かつ Vu でリセットすればよい。ただし, となるので注意のこと
4. Vd は LS1を Vu で禁止することにより得られる。
5. V cはリミットスイッチや制御器具の信号から直接生成することはできない。 SB でセットはできるが,リセットでは LS2が押された時となるが,スタート時に LS2が入っているのでセットできない。補助リレー Xを用いて図のようなタイミングを作りリセットする。
uVLS 3

プログラマブルコントローラ
Programable Controller(PC) シーケンサとも呼ばれるプログラマブルコントローラの内部構成
パソコンコンソール
シーケンサの制御プログラム ユーザプログラムデータ一時記憶

プログラマブルコントローラ
プログラムの入力方法 ラダー図 (パソコン入力)
ニーモニック(Mnemonic) (パソコン,コンソール)LD 01OR 64ANDC 00
フローチャート等 (パソコン) フローチャート ペトリネット

プログラマブルコントローラ
自己保持回路の構成例 下図のような自己保持回路をPC で実現する。
自己保持回路
F
S
ff
R S
R
F

プログラマブルコントローラ
プログラムの例(ニーモニック)
LD 0
OR 64
ANDC 1
ST 64
S F
S
ff
R
S
f
S
f
R
LD 0
OR 64
ANDC 1
ST 64

入力インターフェース
入力インターフェースの条件雑音に強い絶縁されている
D
DccD I
VVR
1
mA205 DI
V5.1DV
DC II 0.105.0
C
ccC I
VR 2