-
Winter 2009 (RBC)
by Naohito Abex8347
[email protected] October
1
2001RBC 10RBC101982 Kydlandand Prescott Long and PlosserRBCRBC
fit RBC RBCKPR
Forward
1
-
2
Romer[2006] Sargent and Ljungqvist [2004] ( RBC) Adda and Cooper
[2003](5 RBC) RBCGeorge McCandless [2008] The ABCs of RBCs: An
Introduction to Dynamic
Macroeconomic Models Harvard University Press.RBCThomas F.
Cooley ed. [1995] Frontiers of Business Cycle Research, Prince-
ton University Press.
Sergio Rebelo [2005] Real Business Cycle Models: Past, Present
and Fu-ture, Scandinavian Journal of Economics, vol. 107(2), pages
217-238, 06RBC Frontier
Angeletos and Lao [2009] Noisy Business Cycles, mimeo
40
Carlo A. Favero [2001] Applied Macroeconometrics, Oxford
University Press. VAR, Cowles Commission Approach, GMM Cari-
brationJohn B. Taylor and Michael Woodford Ed. [1999] Handbook
of Macroeco-
nomics 1A, 1B, and 1C, North-Holland.
web
Christopher D. Carroll[2005] Lecture Notes on Solution Methods
for Rep-
resentative Agent Dynamic Stochastic Optimization Problems,
Johns HopkinsUniversity.Caroll web
webhttp://www.econ.jhu.edu/people/ccarroll/public/lecturenotes/
2
-
webDirkKruegerUrlig, CochoranewebWilliam H Greene [2008]
Econometric Analysis, Sixth Edition, Prentice Hall. Appendicwa
Marimon and Scott ed. [1999] Computational Methods for the Study
of Dy-
namic Economies, Oxford University Press.Miranda and Fackler
[2002] Applied Computaional Economics and Finance.
MIT Press.Kenneth L. Judd. [1998] Numerical Methods in
Economics. MIT Press,
Cambridge, Massachusetts.Judd [1988]
Marimon and Scott [1999]Miranda and Fackler [2002]Hans M. Amman,
David A. Kendrick, and John Rust [1996] Handbook of
Comuptational Economics, vol1, North Holland.
C FortranMatlabGauss
Press, Teukolsky, Vetterling, and Flannery Numerical Recipes C,
C++, Fortran90 For-tran77 IMSLJohn Rust
web
[2002] [1992] Chevychev Polinomial
3
-
3 RBC
1950 60Kaldor Stylized Facts
Solow
(1) (2) (3) (4) (5) (6)
Solow
Romer[2001] p.169 (4.1)
RBCDSGKeynesian PhillipsSolow (Growth Accounting) 1/32/3 (Solow
Residuals)CPU12007 2008
1 Solow Residuals
4
-
Solow Residuals ()RBC DSGE
?RBCGDP, Solow Residuals Solow Residuals
GDPHodric-Prescott (the
H-P filter) yt components(yct , y
gt )yct Cyclical Component
ygt Component
MinT
t=1
(yct )2 +
T1t=2
[(ygt+1 ygt
) (ygt ygt1)]2 , (1)yt = yct + y
gt . (2)
16002 = 0 = 1600 83Solow Residuals4 1Cooley ed.[1995]
2Annual 100Monthly 14400
3Burnside[1999]H-P filter
4Eviews TSP
5
-
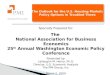
H-P filter Cross CorrelationCooley ed.[1995]
(1) 1.72 1.59 or 1.69
(2)
(3) smooth
(4)
(5) Pro Cyclical
(6)
(7)
RBC H-Pfilter
H-Pfilter Detrending Method
Ravn, Morten O. and Uhlig, Harald, On Adjusting the HP-Filter
for theFrequency of Observations, Review of Economics and
Statistics, Vol. 84, Issue2 - May 2002. annual 1006.25
Baxter and King [1999] Measuring Busibess Cycles: Approximate
Band-
Pass Filters for Econmic Time Series, Review of Economics and
Statistics,Vol. 81, Issue 4 . Band-Pass Filter
Band-Pass FilterFigure 1Band Pass FilterHP Filter ()
Favio Canova.[1998], Detrending and Business Cycle Facts,
Journal ofMonetary Economics 41, 475512.
Stata web (http://ideas.repec.org/c/boc/bocode/s447001.html)
6
-
Timothy Cogley and Japnes M. Nason [1995] Effects of the
Hodrick-PrescottFilter on Trend and Difference Stationary Time
Series, Journal of EconomicDynamics and Control vol 19.Lawrence J.
Christiano & Terry J. Fitzgerald [2003]. The Band Pass Fil-
ter, International Economic Review, vol. 44(2), pages 435-465,
05.5
Stylized Facts
4
Stylized Facts Starting Point
(support)
Max
0
etu (ct) dt, (3)
s.t.dktdt
= f (kt) kt ct for all t, ko > 0: given. (4)
1 44 4 1
5 [2002]90 July
7
-
Max
t=0
tu (ct) , (5)
s.t. kt+1 = f (kt) + (1 ) kt ct for all t, ko > 0: given.
(6)
u (ct, 1 lt) (7)lt 1 lt
1
yt = eztF (kt, lt) , (8)
zt (AR1)
zt+1 = zt + t+1 (9)
(i.i.d.)0 < < 1zt 0 i.i.d.6 AR1200920107
6 Romer[2001] 7
Behavioral Economics Robert Shiller Alan Blinder (Thaler)[1998]
( )
8
-
8t Et
Eo
[ t=0
tu (ct, 1 lt)]
. (10)
(support)
[]
Max E0
[ t=0
tu (ct, 1 lt)]
, (11)
s.t. kt+1 = eztF (kt, lt) + (1 ) kt ct, for all t, ko > 0:
given, (12)
zt+1 = zt + t+1. (13)
Saddle Path
ct = h (kt) , (14)
Saddle PathPolicy Function jump State Variable Pre-determined
Variablet t Control Variable Non-Predetermined Variable
Predetermined Variable Control VariablePolicy Function
8
9
-
RBCState Variable kt zt 9tControl Variable ct lt
ct = h1 (kt, zt) (15)
lt = h2 (kt, zt) (16)
102 Policy Function11Scarf Algorithm
ClosedForm Policy Function (1) (2)
5 (Linear-Quadratic Methods)
Blanchard and Kahn[1980] King, Plosser, and Rebelo [1988a,
b]Blachard-KahnKPRPolicy Functions
9 State Variables
10 Stokey and Lucas [1989], Recursive Methodsin Economic
Dynamics, Harvard University Press 1960
11
10
-
Predetermined Variables Saddle PathSaddlePath Saddle Path Random
Lagrange Methods
L = E0
[ t=0
tu (ct, 1 lt) + tt (eztF (kt, lt) + (1 ) kt ct kt+1)]
.
(17) tctltkt+1
Et
[ct
u (ct, 1 lt) t]
= 0, (18)
Et
[
ltu (ct, 1 lt) + tezt
ltF (kt, lt)
]= 0, (19)
Et
[t + t+1
(ezt+1
kt+1F (kt+1, lt+1) + (1 )
)]= 0. (20)
2 t t(20)tt t
ctu (ct, 1 lt) = t, (21)
lt
u (ct, 1 lt) = tezt lt
F (kt, lt) , (22)
t = Et
[t+1
(ezt+1
kt+1F (kt+1, lt+1)
)]. (23)
t+1 t Random Multiplier 2
lt u (ct, 1 lt)
ctu (ct, 1 lt)
= ezt
ltF (kt, lt) . (24)
1 1
11
-
limtEo
[ttkt
]= 0. (25)
path12
limtEo
[tkt
]= 0, (26)
6
Cooley ed.[1995]13
(1) 0.1 0.1GMMMLSimulation
12Stokey, Lucas, and Presoctt [1989], Recursive Methods in
Economic Dynamics,Harvad University Press.
13 RBC t- F-
12
-
(2) (1) RBC
(3) (1)(2)
Cooley ed.[1995]14
Yt = eztAKt L1t . (27)
1
u (ct, 1 lt) =(c1t (1 lt)
)1 11 . (28)
1/ = 115
u (ct, 1 lt) = (1 ) ln ct + ln (1 lt) . (29)
[]
Max Eo
[ t=0
t ((1 ) ln ct + ln (1 lt))]
, (30)
141990
15 simulation Policy Function
13
-
s.t. (1 + ) kt+1 = eztAkt l1t + (1 ) kt ct, for all t, ko >
0: given, (31)
zt+1 = zt + t+1. (32)
(1 + )t
Cooleyed. [1995] 0.40
Et
[t + t+1 (1 + )1
(ezt+1
Akt+1l1t+1
kt+1+ (1 )
)]= 0. (33)
zt = 0 for all t
y
k+ (1 ) = 1 +
. (34)
(1 ) yc
=
1 l
1 l . (35)
(1 + )k
y= (1 ) k
y+
i
y. (36)
i = ( + ) k, (37)
0.076 2.8% = 0.048 0.012, = 0.947, 0.987Beckerdiscretionary time
1/3 0.31(35)y/c 1.33/ (1 ) = 1.78Solow Residuals, ztGDP, K,
L
14
-
ztzt1 = (lnYt lnYt1) (lnKt ln Kt1)(1 ) (ln lt ln lt1) , (38)
zt Cooley = 0.95t = 0.007
16
0.40 0.012 0.95 0.007 0.026 0.987 1 0.64
7 ()
(1 ) eztAkt l
1t
ct=
1 lt
1 lt , (39)
(1 )ct
= t, (40)
(1 + ) kt+1 = eztAkt l1t + (1 ) kt ct, (41)
t = Et
[t+1 (1 + )
1(
ezt+1Akt+1l
1t+1
kt+1+ (1 )
)], (42)
zt+1 = zt + t+1. (43)
Policy FunctionsLinear QuadraticRandom MultiplierDynamic
ProgramingValueFunction Policy FunctionsDynamicPrograming
16 A A A
15
-
Blanchard and Kahn[1980] () PC 1 (ct, kt, lt, t, zt, t) = (c, k,
l, , 0, 0)
for all t
g (y) = f (x) , x R. (44) (x, y) = (x, y)
g (y) +dg
dy(y) (y y) = f (x) + df
dx(x) (x x) . (45)
x = eln x (46)
h = ln x, (47)
j = ln y, (48)
y = f (x)
g(ej
)= f
(eh
). (49)
j,h
g(ej
)+ ej
dg
dy
(j j) = f (eh) + df
dx
(eh
)eh
(h h) . (50)
j,h y,x
g (y) + ydg
dy(y) (ln y ln y) = f (x) + x df
dx(x) (lnx lnx) . (51)
(45)y x
dy = ln y ln y, dx = lnx ln x, (52)g (y) = f (x)
16
-
ydg
dy(y) dy = x
df
dx(x) dx. (53)
Y = AKL1. (54)
Y = AKL
1
Y (dY ) = AKL
1dA + AK
L
1dK + (1 ) dL. (55)
dY = dA + dK + (1 ) dL. (56)
(39) (43)ztzt
dzt + dkt + (1 ) dlt dct = 11 l dlt, (57)
dct = dt, (58)
dt = Etdt+1 + Etdzt+1 + ( 1)Etdkt+1 + (1 )Etdlt+1, (59)
(1 + )k
ydkt+1 = dzt + dkt + (1 ) dlt + (1 ) k
ydkt c
ydct, (60)
dzt+1 = dzt + dt+1. (61)
=y
(1 + ) k, (62)
y = Akl1, (63)
y
k+ (1 ) = 1 +
, (64)
(1 ) yc
=
1 l
1 l , (65)
17
-
( + )k
y= 1 c
y, (66)
y = kl1, (67)
y
k=
1
[1 +
(1 )
], (68)
c
y= 1 ( + ) k
y, (69)
l =1
(1 ) yc[1 + 1 (1 ) yc
] , (70)Root FindingMatlab fzero17(57)-(61)
Policy Functions
dct = C1dkt + C2dzt, (71)
dlt = C3dkt + C4dzt, (72)
dct Policy Function(57) dlt Policy Function (58)dt Policy
Function Policy Function Policy Function Policy FunctionBlanchard
and Kahn[1980] Control VariableBurnside[1999]King, Plosser, and
Rebelo [1988a, b]
17 (Maximum Likelihood Methods)fzero Matlab Root Finding
ToolBox
18
-
(1) Control Variables State Variables, Shocks
(2) State Variables, Shocks(3) Jordan(4) Policy Function(5)
(1)Control Variables Policy Function
(1)(57) (58)
(1 11l 1 + 1 0
)(dctdlt
)=
( 00 1
)(dktdt
)+
(10
)dzt. (73)
(59) (60)( (1 ) 1 (1 + ) ky 0
)Et
(dkt+1dt+1
)+
(0 1
+ (1 ) ky 0)(
dktdt
)=
(0 (1 )0 0
)Et
(dct+1dlt+1
)+
(0 0
c/y (1 ))(
dctdlt
)+(
0
)Etdzt+1 +
(01
)dzt. (74)
2
MccVt = McsXt + Mcezt, (75)
Mss0EtXt+1 + Mss1Xt = Msc0EtVt+1 + Msc1Vt + Mse0Etzt+1 + Mse1zt,
(76)
Vt = (ct, lt)Xt = (kt, t)
Control Variables 2
MccM1cc 18
Vt = M1cc McsXt + M1cc Mcezt, (77)
Mss0EtXt+1 + Mss1Xt = Msc0Et(M1cc McsXt+1 + M
1cc Mcezt+1
)+
Msc1(M1cc McsXt + M
1cc Mcezt
)+ Mse0Etzt+1 + Mse1zt,
(78)
18Mcc Control Variables Mcc
19
-
EtXt+1 = WXt + REtzt+1 + Qzt (79)
W = (Mss0 Msc0M1cc Mce)1 (Mss1 Msc1M1cc Mcs) , (80)R =
(Mss0 Msc0M1cc Mce
)1 (Mse0 + Msc0M1cc Mce
), (81)
Q =(Mss0 Msc0M1cc Mce
)1 (Mse1 + Msc1M1cc Mce
), (82)
Predetermined VariablesStep (3)JordanW
P1Xt+1 = P1Xt + P1RZt+1 + P1QZt, (83)
WP
PP1 = W. (84)
(xtt
)= P1Xt. (85)
Predetermined Variables xt 1Predetermined Variables State
Variables
11 P
=(
1 00 2
), (86)
1 12 12 1 11Predetermined Variables1 PredeterminedVariables
indeterminacyindeterminacy1 PredeterminedVariables
20
-
W P,R,Q 1 4
W =(
W11 W12W21 W22
), R =
(RxR
), (87)
Q =(
QxQ
), P =
(P11 P12P21 P22
), (88)
P1 =(
P 11 P 12
P 21 P 22
). (89)
(W11 W12W21 W22
)=
(P111P 11 + P122P 21 P111P 12 + P122P 22
P211P 11 + P222P 21 P211P 12 + P222P 22
).
(90)(83)
Etxt+1 = 1xt +(P 11Rx + P 12R
)Etzt+1 +
(P 11Qx + P 12Q
)zt. (91)
Etxt+1 xtPolicy Function
Ett+1 = 2t +(P 21Rx + P 22R
)Etzt+1 +
(P 21Qx + P 22Q
)zt, (92)
2 1 (2)t ForwardForward
t = 12 Ett+1 12[(
P 21Rx + P 22R)Etzt+1 +
(P 21Qx + P 22Q
)zt
],
(93)
t =
j=0
(j+1)2[(
P 21Rx + P 22R)Etzt+1+j +
(P 21Qx + P 22Q
)Etzt+j
].
(94) t
12 1
limj
(12
)jEtt+j+1 = 0, (95)
21
-
zt AR1
t zt
zt+1 = zt + t+1, (96)
Etzt+1 = zt, (97)
t = zt, (98)
=
j=0
(j+1)2[(
P 21Rx + P 22R) +
(P 21Qx + P 22Q
)]jzt. (99)
t, xt Xt = (kt, t)
t = (P 22
)1P 21xt +
(P 22
)1t. (100)
xt+1 = W11xt + W12t + RxEtzt+1 + Qxzt, (101)
xt+1 =(P111P 11 + P122P 21
)xt+
(P111P 12 + P122P 22
)t+RxEtzt+1+Qxzt,
(102)
xt+1 =(P111
[P 11 P 12 (P 22)1 P 21]) xt+(
P111P 12 + P122P 22) (
P 22)1
t + RxEtzt+1 + Qxzt. (103)
(E FG H
)(104)
(D1 D1FH1
H1GD1 H1 + H1GD1FH1)
, (105)
D = E FH1G. (106)
22
-
xt+1 =(P111P111
)xt+
(P111P 12 + P122P 22
) (P 22
)1t+RxEtzt+1+Qxzt.
(107)t = zt
xt+1 =(P111P111
)xt+
(P111P 12 + P122P 22
) (P 22
)1zt+RxEtzt+1+Qxzt,
(108)
xt+1 =(P111P111
)xt +
[(P111P 12 + P122P 22
) (P 22
)1 + Rx + Qx
]zt,
(109)
xt+1 = xxxt + xzzt. (110)
t
t = (P 22
)1P 21xt +
(P 22
)1zt, (111)
Control Variables Vt = (ct, lt)
Vt = M1cc Mcs
(I
(P 22)1 P 21)
xt+[M1cc Mcs
(0
(P 22)1 )
+ M1cc Mce
]zt,
(112)
Vt = uxxt + uzzt. (113)
Policy Functions State Vari-ables
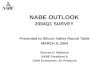
8 Impulse Response Functions
Policy FunctionsPolicy Func-tionsImpulse Response Functions 1%
Impulse ResponsePolicy Functions
23
-
zt+1 = zt + t+1 t+1 t+1 zt Predetermined Variables
xt+1 = xxxt + xzzt. (114)
Predetermined VariablesControl VariablesPolicy Functions
Wt = uxxt + uzzt. (115)
st =(
xtzt
). (116)
st
st+1 = Mst + t+1, (117)
M =(
zz zz0
), t =
(0t
). (118)
t t+1 1 Predetermined Variables
st+j = M jst + M j1t+1, (119)
Control Variables
Vt+j = (ux,uz) st+j , (120)
2 Impulse Response Functions
9 Matlab Programs
Impulse-Response FunctionsMatlab 2 1 The Main Program 2 1Policy
Functions 2% Matlab
[ 1] (The Main Program)
24
-
%%%%clear all;format short;%% Parameter Values%delta = 0.012; %
Depeciation (annual)beta = 0.987;gam = 0.026;ehta = 0.95;alpha =
0.64;ceta = 0.40;%% Special Values for our model%%yovk = (1/ceta)*(
(1+gam)/beta - (1-delta));covy = 1-(gam+delta)*(1/yovk);le =
((1-alpha)/alpha)*(1-ceta)*(1/covy)/(
1+((1-alpha)/alpha)*(1-ceta)*(1/covy));mhu =
ceta*yovk*beta/(1+gam);%n=1; % The number of the predtermined
variables%iter1=30; % The number of itertation for
Impulse-Responses%%%% Matrices For subroutine to solve dynamic
optimization problem%%% MCC matrix%mcc=zeros(2,2);mcc(1,1) =
1;mcc(1,2) = 1/(1-le) -1 +ceta;mcc(2,1) = -1;%%% MSC Matrix%mcs =
zeros(2,2);mcs(1,1) = ceta;mcs(2,2) = 1;
25
-
%%% MCE Matrix - no stochastic elements%mce =
zeros(2,1);mce(1,1) = 1;%%% MSS0 Matrix%mss0 = zeros(2,2);mss0(1,1)
= -mhu*(1-ceta);mss0(1,2) = 1;mss0(2,1) = -(1+gam)/(yovk);%%% MSS1
Matrix%mss1 = zeros(2,2);mss1(1,2) = -1;mss1(2,1) =
ceta+(1-delta)*(1/yovk);%%% MSC0 Matris%msc0 = zeros(2,2);msc0(1,2)
= -mhu*(1-ceta);%%% MSC1 Matrix%msc1 = zeros(2,2);msc1(2,1) =
covy;msc1(2,2) = -1+ceta;%%% MSE0 Matrix%mse0 =
zeros(2,1);mse0(1,1) = -mhu;%%% MSE1 Matrix%mse1 =
zeros(2,1);mse1(2,1) = -1;
26
-
%%% PAI Matrix%pai = zeros(1,1);pai(1,1)=
ehta;%%%[GXX,GXZ,GUX,GUZ,M,Psi,V] =
burns6(n,mcc,mcs,mce,mss0,mss1,msc0,msc1,mse0,mse1,pai);%%%
Drawning the impulse and response function%%TSE=zeros(2,1); % The
state and shock variables%TSE(2,1)=1;%%%T =zeros(iter1,8); %
Impulse Response Matrix%T(1,1) = 1; % The first periods index%%N =
M;%%for k=1:iter1
%%k1 = k;%TCC = GUX*TSE(1,1) + GUZ*TSE(2,1);%TY =
(1-ceta)*TCC(2,1)+ceta*TSE(1,1) + TSE(2,1);%TW = TY - TCC(2,1);%TR
= TY - TSE(1,1);%T(k,:)=[k1 TCC(1,1) TCC(2,1) TSE(1,1) TSE(2,1) TY
TW TR];%TSE=M*TSE;%
27
-
%end;%%% Plot the
results%%%figure;%subplot(4,2,1)plot(T(:,1),T(:,2))title( (1)
Consumption)xlabel(Year)%subplot(4,2,2)plot((T(:,1)),T(:,3))title(
(2)
Employment)xlabel(Year)%subplot(4,2,3)plot((T(:,1)),T(:,4))title(
(3) Capital)xlabel(Year)%subplot(4,2,4)plot((T(:,1)),T(:,6))title(
(4) GDP)xlabel(Year)%subplot(4,2,5)plot((T(:,1)),T(:,7))title( (5)
Wage)xlabel(Year)%subplot(4,2,6)plot((T(:,1)),T(:,8))title( (6)
r)xlabel(Year)subplot(4,2,7)plot((T(:,1)),T(:,5))title( (7)
shock)xlabel(Year)
%%%%%%%%%%%%%%%%% The End of the Program %%%%%%%%%%%%
28
-
[ 2]
function [GXX,GXZ,GUX,GUZ,M,Psi,V] =
burns6(n,mcc,mcs,mce,mss0,mss1,msc0,msc1,mse0,mse1,pai)%% n is the
number of the predetermined variable.%% Mcc*ut =
Mcs*(xt,ramt)+Mce*zt,% Mss0*(xt+1, ramt+1) +Mss1*(xt, ramt) =
Msc0*ut+1 + Msc1*ut+Mse0*zt+1
+ Mse1*zt,% zt+1 = Pai * zt + et.%%% Mss0 should be square.%%
The outputs of this fumction are Gxx, Gxz, Gux, and Guz which are
the
coefficinents of%% xt+1 = Gxx*xt + Gxz *zt,% ut = Gux*xt + Guz
*zt.%% M is a transition matrix for both xt and zt.% V is a
diagonal matrix which shows the stability of the system.% The
number of the diagonal elements whose absolute values are% smaller
than one should be the same as the number of the state variables%
to get a unique solution.%%Mss0 = mss0 - msc0*inv(mcc)*mcs;Mss1 =
mss1 - msc1*inv(mcc)*mcs;Mse0 = mse0 + msc0*inv(mcc)*mce;Mse1 =
mse1 + msc1*inv(mcc)*mce;%W = -(Mss0)\Mss1;R = (Mss0)\Mse0;Q =
(Mss0)\Mse1;%% This corresponds to
(xt+1,ramt+1)=W*(xt,ramt)+Q*zt+1+R*zt;%[PO,VO]=eig(W); % The
eigensystem of this economy.%n1 = length(W); % The number of the
endogenous variables in the reduced
model.%% Rearranging the matrices%
29
-
alamb=abs(diag(VO));[lambs,
lambz]=sort(alamb);V=VO(lambz,lambz);P = PO(:,lambz);%%
Partitioning the matrices%P11 = P(1:n,1:n);P12 = P(1:n, n+1:n1);P21
= P(n+1:n1,1:n);P22 = P(n+1:n1,n+1:n1);%PP = inv(P);PP11 =
PP(1:n,1:n);PP12 = PP(1:n, n+1:n1);PP21 = PP(n+1:n1,1:n);PP22 =
PP(n+1:n1,n+1:n1);%V1 = V(1:n,1:n); % The Partition of the Jordan
Matrix.V2 = V(n+1:n1, n+1:n1);%Rx = R(1:n, :);Rr = R(n+1:n1, :);%Qx
= Q(1:n, :);Qr = Q(n+1:n1,:);%Phi0 = PP21*Rx + PP22*Rr;Phi1 =
PP21*Qx + PP22*Qr;Phi01 = Phi0*pai + Phi1;%n2 = size(mce);n3 =
n2(2);%% Making a Matrix, Psi%Psi=zeros(n1-n,n3);%
for i = 1:n1-n;%for j=1:n3;
%Psi(i,j)=-(Phi01(i,j)/(1-inv(V2(i,i))*pai(j,j)));%
end;%
30
-
end;%Psi = (V2)\Psi;%GUX0 = [eye(n);-(PP22)\PP21];GUZ0 =
[zeros(n,n3);(PP22)\Psi];%% Outputs, The Coefficients for the
Policy Functions.%GXX = P11*V1*inv(P11);GXZ = (P11*V1*PP12 +
P12*V2*PP22)*inv(PP22)*Psi+Qx+Rx*pai;GUX = inv(mcc)*mcs*GUX0;GUZ =
inv(mcc)*mcs*GUZ0+inv(mcc)*mce;M = [ GXX GXZ; zeros(n3,n)
pai];%%%%%%%%%%%% The End of the Program %%%%%%%%%%%%%
10
Policy Functions
dct = 0.6013dkt + 0.4305dzt, (121)
dlt = 0.2291dkt + 0.6481dzt, (122)
dkt+1 = 0.9427dkt + 0.1362dzt. (123)
ztztAR1 1% % 2
zt 1zt
31
-
ztAR1zt 2ztLucas Impulse Response Functions
1% Policy Functions0.43% 0.65% 1% (1 ) = 0.6% 0.389% 1% 1.389%
1%
(Predetermined) Policy Functions
zt Policy Functions dzt zt
32
-
1
Tclblel1
CycJiccllBehcIVioroheUSEconomyDeviclionsfromTrendofKeyVclriclbles19541991ll
CrossCorrelationofOutputwith
J 54 32 1Y 1Y2 r3r45
Outputeomponent
GNP l2
ConsumptlOneXpenditures
02 16 38 63 85 10 85 63 38 16 02
0 1 1
l rJ
hU 3
0 0
25 42 57 72 82 83 67 46 22
22 40 55 68 78 77 64 47 27
24 37 49 65 75 78 6l 38 11
CONS
CNDS
CD
Investmellt
INV
INVF
INVN
INVR
ChINV
Govemmentpurehases
GOVT
Exports and imports
EXP
IMP
4 4 3 0
2 4 5
4 0 h 3 5
0 0 4 3
79 91 76 50 22
82 90 8 60 35
57 79 88 83 60
74 63 39 11 14
53 67 5l 27 04
01 04 08 11 16
0 J O 1 00
5 h J 7 J
nX 3 5 5 2
J 4 0 h l
0 5 5 7 1 5 0
4 00 0 J
O O 4 0
4 4 1
2 3 1 7 J
OO 5 5 0 7
03 204
4 9U
4
10 15 37 50 54 54 52
45 62 72 71 52 28 04
553 48 42 29
488 11 19 31
Laborinputbasedonhouseholdsurvey
HSHOURS 159 06 09 HSAVGHRS 063 04 16
1 5
30 53 74 86 82 69 52 32
34 48 63 62 52 37 23 09
HSEMPLMT 10 04 23 46
GNPHSHOURS O90 06 14 20 30
9 L15 40
33 41 19 00 18 25
00 4
Laborinputbasedon
establishmentsurvey
ESHOURS
ESAVGHRS
ESMPLMT
GNPESHOURS
Averagehourlyeamings
basedonestabJishment
0 00 1 J
hU 4 4 7 1 0 L O
7 hU 1 4
0 0 4
4 0 5 1 1 1 J
3842
00 9U 4
7 h 7 J
4
0 h 00 3
J 5 J O
h 0 7 3
9U l h 0
7 00 0
0 5 0
0 4 1
4 00 7 5
5 J 4 4
1 0 4
3 J 4
5 5 00
4 1 5 J SurVey
WGE O757
Averagehourlyeompen
sationbasedonnation
20 29 12 03
alincomeaccounts
COMP O55 24 25 21 14 09 03 07 09 09 09 10
NoesGNPrealGNP1982CONSperSOnalconsump10neXPendiure1982SCNDSCOnSumPILOnOfnondurabesandservices1982CDOnSumPtlOnOf
durables1982SINVgrOSSPrlVatedomesicinvestmenI1982SINVFfixedinvestment1982SINVNnOnTeSidentiafixedinvestment1982INVRreSidenIia1
6xedinvesment1982SChINVhangeininventoTies1982GOVTgOVemnlenPurChasesofgoodsaJldservices1982EXPeXPOrtSOfgoodsandservices1982
IMPinlPOrtSOrgOOdsandservices1982HSHOURStOa10uTSOfworkHouseholdSurveyHSAVGHRSaVerageVeeklyhoursofworkHouseholdSurvey
HSEMPLMTmPlomentESHOURStOtahoursofworksEsablishmentSuneyESAVGHRSaVerageWeeklyhoursofworkEstablishment
SurveyESEMPLMTmPloymentEstablishmenSurveyWAGEaVeragehourleanling1982EstablishmenSurveyCOMPaVerage0acompensationper
hour1982NationalIncomeAccounSTheEstablishmenSurveysampleisfor1964l199l
FrontiersofBusinessCycle ResearchPIEditedbvThomasFCooley
PublishedbyPrincetonUniversltyPress
-
41 tntrodutionSome FatSabout EOnOmiFJutuatjons 169
U1StstOppUOSuO
dU
000 0 0
000 0 0
00 0 0 0
987 6 5
0 0
0
0 0
0
0 0
0
2
4 3
19471952195719621967197219771982198719921997
FJGURE41USrealGDP19471999
TABLE41 ReeSSions jn the United States sineWorldWarIl
Yearandquarter Numberofquartersuntil ChangeinrealGDP
OfpeakinrealGDP troughinrealGDP peaktotrough
19484
19S32
19573
19601
19703
19734
19801
19813
19902
AdvancedMacroeconomicsEditedbvDavidRomer
-
1Consumption 2Employment 0
0
0
0
0
0
0
0
0
0
0 0 5 10 15 20 25 30
Year
3Caplal
0 5 10 15 20 25 30
Year
4GDP
1
0
0
0
0
0
1
1
1
0
0
0 0 5 10 15 20 25 30
Year
5Wage
0 5 10 15 20 25 30
Year
6r
1
1
0
0
0
0
0
0
0
0 0 5 10 15 20 25 30
Year
7shock
0 5 10 15 20 25 30
Year
1
0
0
0
0 0 5 10 15 20 25 30
Year
-
0 02
0
0.02
0.040:01
2:01
4:01
6:01
8:01
0:01
2:01
4:01
6:01
8:01
0:01
2:01
4:01
6:01
8:01
DetrendedGDP
HPFilter
0.08
0.06
0.04
0.02
0
0.02
0.041980:01
1982:01
1984:01
1986:01
1988:01
1990:01
1992:01
1994:01
1996:01
1998:01
2000:01
2002:01
2004:01
2006:01
2008:01
DetrendedGDP
HPFilter
BaxterKing