Embed Size (px)
Citation preview

IEEE Transactions on Power Apparatus and Systems, Vol. PAS-102, No. 7, July 1983
IMPLEMENTATION OF ADVANCED GENERATOR MODELSINTO POWER SYSTEM STABILITY PROGRAMS
P. KundurSenior Member, IEEE
P.L. DandenoFellow, IEEE
Ontario HydroToronto, Ontario, Canada
ABSTRACT
This paper describes the relevant equations and otherancillary features required for implementation ofimproved synchronous machine models into large scalestability programs. The improved models overcome thelimitations that have been experienced with theconventional models used by most stability programs.The method of implementation proposed iscomputationally efficient and provides sufficientflexibility for utilization of conventional lowerorder models.
INTRODUCTION
The requirement for improved stability models forsynchronous machines has increased considerably in theelectric power industry during the past decade. Thereare several factors which have influenced such a
requirement: more economical machine and systemdesigns resulting in a decrease in stability margins;increased dependence on high initial response
excitation systems and the resulting need for accurateprediction of machine flux response to excitationcontrol; and the characteristics of the present dayinterconnected systems requiring simulation of thesystem responses up to several seconds.
The traditional approach to synchronous machinemodelling has been to describe it in terms ofparameters that are directly related to observedmachine behaviours under standard test conditions.The normal parameters used are the transient andsub-transient reactances and time constants meant tocharacterize 'the open circuit and short circuitresponses of machine flux in accordance with ANSIStandards. In recent years, it has been recognizedthat the ANSI standard data is ofteninadequate1,2,3,4. Reference 5 shows how theimproved models for solid iron rotor turboalternatorsmay be derived from a specialized analysis of rotorcircuits based on design data. Several new testprocedures have also been developed for accuratedetermination of synchronous machine dynamiccharacteristics. These include standstill and on-linefrequency response measurements6'7, and voltagedecrement tests8'9. Much of the stimulus forrecent work on improved test procedures came from theEPRI Project RP-997. This work is complemented by theEPRI Project RP-1288 in which finite element analysisis being employed by the General Electric Company fordeveloping synchronous machine models from designdata.
83 WM 030-4 A paper recommended and approvedby the IEEE Power System Engineering Committee ofthe IEEE Power Engineering Society for presenta-tion at the IEEE/PES 1983 Winter Meeting, NewYork, New York, January 30-February 4, 1983.Manuscript submitted September 1, 1982; madeavailable for printing December 29, 1982.
Models that have been derived from these new
approaches do not generally conform to theconventional models used by most large scale stabilityprograms. In particular, it has been found necessaryto account for the unequal mutual inductances between
the d-axis stator and rotor circuits. Depending on
the rotor construction, it may be necessary torepresent up to three rotor circuits in each axis. Ithas also been found necessary to account for theq-axis saturation more accurately.
In this paper, a set of improved synchronous machinemodels suitable for stability studies are defined anda method of implementing the models into stabilityprograms are developed. These models have beenincorporated into the Ontario Hydro Stability Programwhich has a partitioned-explicit structure and theEPRI Transient and Midterm Stability Program which hasa simultaneous-implicit structure.
MODEL DEFINITION
Detailed Model
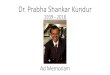
The structure of the most complex synchronous machinemodel considered adequate for stability studies10'11is shown in Figure 1. It has a field winding and twoamortisseur circuits in the d-axis and threeamortisseur circuits in the q-axis. The amortisseurcircuits represent the effects of induced currents inthe solid rotor surface, teeth, slot wedges and damperbars (if present). The branches Lf12d, Lf2d inthe equivalent circuit account for unequal mutualinductances between armature, field and rotor bodycircuits.
L L fl2d Lf2d Lfd
d-axis
q-axis
Fig. 1. Synchronous machine equivalent circuits
0018-9510/83/0700-2047$01.00 1983 IEEE
2047

2048
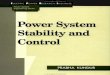
The effect of saturation is represented by varying theinductances Lad and Laq. Experience has shown thatthe saturation of the q-axis is appreciably more thanthat of the d-axis11,12. It is, therefore, recommendedthat different saturation characteristics be used forthe two axes, with Lad and Laq varying as a functionof the total air-gap flux linkage. The saturationcharacteristic of the d- and q-axis may be obtainedeither from design data12 or from steady-statemeasurements of field current and rotor angle atdifferent values of terminal voltage, real andreactive power output11. The saturationcharacteristics derived from steady-state measurementson a 500 MW generator at our Lambton GS is illustratedin Figure 2.
Q
:3CL
1.25 Qai1 . 25 ~~~~~~~~~~D-axis $ / air-gap line
1.00
0. 75
/// A D-axis measured load points
0. 50* Q-axis measured load points
_00 0.25 0.50 0.75 1.00 1.25 1.50
D-axis/Q-axis Excitation - pu
1.75 2.00
Fig. 2. Measured d- and q-axis. saturationcharacteristics
Lower Order Models
For large-scale stability studies, it is desirable tohave the ability to represent synchronous machineswith lower order models. Designation of the differentmodels of varying degrees of rotor representation issummarized in Table 1. The models are identified bytwo numbers with a period between them. The f irstnumber represents the number of rotor circuits in thed-axis including the field winding; the second numberrepresents the number of q-axis rotor circuits. Thismodel designation has been adopted, on ourrecommendation, by the IEEE Working Group on Exchangeof Power System Analytical Data13.
Table 1
Importance of Accounting forUnequal Mutual Inductance
Models used in most stability programs assume that themutual inductances between each d-axis rotor circuitand the armature are equal. Canay12, among others,shows how an equivalent circuit with unequal mutualinductances can be converted into a simplifiedequivalent circuit with equal mutual inductances(Lf12d and Lf2d equal to zero). However, itshould be recognized that this conversion is validonly for linear conditions. As Lad changes withsaturation all the elements of the simplifiedequivalent circuit and the corresponding rotor perunit system base quantities must also change in orderto maintain the simple form. This fact is often notrealized by those who use the simplified model.
Rather than keep track of these changes, it ispreferable to use the model with unequal mutualinductances and retain the physical significance ofLad. As shown in this paper, such a model can bereadily incorporated into any stability program bystructuring the generator equations in terms of rotorcircuit flux linkages and the parameters of theequivalent circuits instead of time-constants andreactances.
IMPLEMENTATION INTO STABILITY PROGRAM
The method of incorporating the most complex modelproposed is developed first, and then thesimplifications associated with the less complexmodels are discussed.
Equations of the Most Complex Model
The f ol lowing equa t i o n s , b a s e d on Park ' stransformation, describe the non-linear dynamicperformance of a synchronous machine in a d-qreference frame. It is assumed that the q-axis leadsthe d-axis by 900. This is consistent with thereference frame used by practically all largecommercial stability programs. A per-unit system inwhich mutual inductances are reciprocal is used14.
Rotor circuit equations
P(4d =- -WoRdIrd b fd (1 )
and the relationship between the d-axis flux linkagesand currents by:
[Pd ss sr1 [Id
4d Lrs ½rJ Ird
where
LrdF fd
1 d
*2d
Sd - Rfd°
O R1d
LO O
(2)
i-rd fd1
ildi[i2dJ
0
R2d
b = -w
LO J
A-AXIS NO ONE TWO THREEDAMPER DAMPER DAMPERS DAMPERS
CONSTANT MODEL 0.0F LilJXLINKAGE
FIELD MODEL 1.0 MODEL 1.1 MODEL 1.2 MODEL 1.3ONLY
FIELD + MODEL 2.0 MODEL 2.1 MODEL 2.2 MODEL 2.3ONE DAMPER
FIELD + MODEL 3.0 MODEL 3.1 MODEL 3.2 MODEL 3.3TWO DAMPERS

2049
(Lad + Lf 12d) (Lad f 12dLfl2d + Lf2d)
(Lad + Lfl2d)
(Lad + Lf12d+ Lf2d)
(L + Lad d
+ Lf 12d)
(Lad + Lf 12d)
+ Lf2d)
(Lad + Lfl2d)
(Lad + L2d( ad 2d
Lfl12d + f2d
TL =LT [L L L]-sr =-rs ad ad ad
L =L + LSs ad 1
In order to organize the synchronous machine equationsin a form suitable for stability analysis, it isnecessary to eliminate the stator flux linkages androtor currents by expressing them in terms of therotor flux linkages and stator current components.
Equation 2 can be rearranged in terms of the partialinverse of the d-axis inductance matrix as follows:
|IdA [Crd -d | rd
The above equation gives the d-axis stator flux androtor currents in terms of the rotor flux linkages and
stator current. It should be noted that theinductance matrix in Equation 2 is symmetrical andthis is reflected in the mixed matrix of Equation 3.
Substituting for Ird from Equation 3 in Equation 1and replacing efd by exciter output voltage Vf,
(
-wo R (M4 c I)+ b(V R/L)(rd) -oEd (-Md -rd -rd d + f fdadu
-A4)
+FI;--d --rd .-d LdJ
Vf
Similarly for the q-axis,
-q -rq -qr q
LIrqJ L[2rq mqI L lrqJ
and
p (I )=A + B I (6)r -q -rq -q q
The differential Equations 4 and 6 describe thedynamics of the synchronous machine rotor circuitswith rotor flux linkages chosen as state variables.Any suitable nunerical integration technique can beapplied to solve these equations to give the values ofthe state variables as a function of the field voltageand stator current components Id and Iq' Thefield voltage is determined by the excitation systemmodel and the stator current components are determinedfrom the interconnecting network relations.
The air-gap torque required for the solution of theswing equation is given by:
T = )d Iqr q d
= (P + I R ) w /we t a o
(7 )
Field Current
The field current may be computed as a function ofstator current and rotor flux linkages using therelationship given by Equation 3.
It should be noted that, in the "reciprocal" per-unitsystem used for the synchronous machine equations, thefield current required to produce one per-unitgenerator terminal voltage on the air-gap line isequal to 1/Ladu per unit. It is usually more
convenient to use the "non-reciprocal" per-unit systemfor the field current15. In this system, one
per unit field current is that current required toproduce rated generator terminal voltage on theair-gap line. The relationship between the per-unitvalues of field current in the two systems is givenby:
I =L ifd adu fd
(8)
In the case of Alternator-Rectifier ExcitationSystems, the exciter current cannot be negative. Toprovide a path for negative field current, either a
"crowbar" circuit or a varistor is used. Theireffects may be simulated by setting the field voltageto zero and increasing the field resistance (Rfd)appropriately during the period when field current isnegative. The resistance added is fixed for a
"crowbar" and non-linear in the case of a varistor.Once the field current becomes positive, the fieldcircuit resistance is restored to its normal value andthe field voltage is determined by the exciter outputvoltage.
In some cases, no special field shorting circuits are
provided. In this case, the field current isprevented from flowing in the negative direction andthe amortisseurs provide the path for the inducedcurrents in the rotor. This effect may be simulatedby increasing the field leakage inductance to a verylarge value to limit the field current to zero
whenever it is required to be negative. For a more
accurate simulation of this condition, Canay inReference 12 has suggested shorting the field andreplacing the field resistance by a resistancerepresenting the losses owing to eddy currents in theteeth surrounding the field windings.
Stator Equations
The stator circuit dynamic equations are given by:
p ()d) = wo (Vd + w/wo q +Ra Id)
p () =w -w/wlq q o d a q
(9)
For large-scale stability studies, the stator
transients represented by P4d and p4q terms are
neglected for the following reasons:
(a) If the stator transients are included, the
machine currents are not sinusoidal and to be
consistent the transients associated with
transmission system and loads must be included.
L
)I

2050
This would be impractical for large scalestability studies.
(b) Multi-phase faults are mostly sequentiallydeveloped, ie, they start as single phase faultsand develop into two-phase or three-phase faults.If each phase becomes involved as its voltagereaches the peak of the voltage wave, the shortcircuit current would lag by 900 and wouldtherefore start as a sinusoidal wave beginning atzero on the sinewave. In such case, there is no
requirement for a dc component. Records ofoscillograms of short circuit currents appear toshow very little dc offset in the phase currents.Therefore, one cannot depend on the existence ofsuch a dc offset and the resulting braking effectto assist stability. Neglecting the statortransients provides a convenient method ofeliminating the effects of the dc offset.
With the stator transients neglected, the statorequations appear as algebraic equations:
Vd = - w/wq
l) Ra IdV = w/w 4d -R I (10)q o d a q
Using Equations 3 and 5 to eliminate 4)d and Pqin terms of stator current and rotor flux linkagesgives,
Vd = w/w (L I - C %! ) - R Idq o qqLqd r -rr aId
V = w/wo (-Ld Id + Cd 4r) )- I
VI
( 1 1 )
( 12)
d
Fig. 3. Relationship between d,q axes and R,I axes
Vd = VR Sin 6 - VI Cos 6
(14)Vq = VR Cos 6 + VI Sin 6
In the above equations, 6 represents the angle bywhich the q-axis leads the real axis of the commonreference frame as shown in Figure 3. The angle 6 isalso used to identify rotor position with respect tothe real axis.
Using the axes transformation Equations 13 and 14 toexpress the stator Equations 11 and 12 in terms ofreal and imaginary components of stator voltage andcurrent,
-R X I ElR RR ~RI R R (15)
[VI] = IR -RIj [II] [EIJ
where
ER
= w/w0
(C dr Cos6 - C q Sin6)=w/w -dr- rd -qr rq
E = w/w (C 4 Sin6 + C Cos 6)I o -dr -rd -qr -rq
R = w/w (L - L ) Sin6 Cos6 + RRR o dd qq a
R =w/w (Lqq - Ldd ) Sin 6 Cos6 + R
X = w/w (L Cos 6 + L Sin2 6RI o dd qq
XIR =w/w (L Sin26 + L Cos 6)oR dd qq
The inductances Ldd and Lqq defined inEquations 3 and 5 are the sub-sub-transientinductances in the d- and q-axis. If thesub-sub-transient saliency is negligible, ie,Ldd = Lqqi
R =R RRR II a
XR =X X =W/w LXRI = IR o dd
In this case, ER and EI may be considered tobe the real and imaginary components of the voltagebehind the impedance Ra + jX .
The algebraic Equation 15 gives the relationshipbetween the machine stator current and voltagecomponents in a form suitable for inclusion in thenetwork solution and can be readily incorporated intoany stability program.
Implementation of Simpler Models
The reference axes (d,q) of each machine rotate withits rotor. For the purpose of solving theinterconnecting network equations, synchronouslyrotating real and imaginary axes (R,I) are used. Thefollowing equations are used to transform variablesfrom one reference frame to the other:
VR = Vd Sin 6 + V Cos6
(13)VI = -Vd Cos 6 + Vq Sin 6
The method developed above is quite general and isapplicable to any of the generator models. Forsimpler models, the order of the different vectors andmatrices have to be reduced appropriately.
For example, for Model 2. 1, with two d-axis and oneq-axis rotor circuits, *2d, 42q, 43 andthe related elements do not exist. As a result, thesize of Ad and Bd reduces to 2x2 and Aqand Bq will have one element each.
II

INPUT DATA FOR MACHINE CONSTANTS COMPUTATIONAL EFFICIENCY
If the machine model is derived from specialmeasurements such as frequency response measurementsor special design calculations such as finite elementanalysis, the data will be available in the form ofinductances and resistances of the equivalent circuitsof Figure 1. Since the machine equations have beendeveloped in terms of these parameters, they can bedirectly used as input data.
However, conventional data for machine parameters are
usually available in the form of transient andsub-transient reactances (inductances) and time
constants. These are based on manufacturers' designcalculations using traditional methods or actualtransient response tests such as short circuit tests.These parameters have to be converted to inductancesand resistances of the equivalent circuits before theycan be used for the solution of machine equations.
The manufacturers' data in terms of reactances andtime constants are usually based on simplifyingassumptions used in classical theory16'17. The
simplifying assumptions are: in the transient periodRid R2q = ', in the sub-transient periodRfd = R1q = 0. In addition, normally themutual inductance between the d-,axis rotor and statorcircuits are assumed to be equal and the
sub-sub-transient parameters are not considered. Withthese assumptions, the expressions for the parametersof the d-axis equivalent circuit in terms of transientand sub-transient inductances and time constants are
given by:
Lfd Lad (Ld L1)/(Ld d
L L) )/(Lld d 1 d 1 d d
Rfd (Lad fd ow0do
Rld i(Lld Ld L1)/Wo do
Similar expressions apply to the q-axis parameters.
It is possible to express the synchronous machineequations in terms of the reactances and timeconstants. However, it should be noted that theseparameters vary with saturation.
The Ontario Hydro and the EPRI Stability Programsoffer the flexibility of inputting data either interms of the basic parameters of the equivalentcircuits or in terms of the conventional data. Fordetailed models, the data is entered in terms of thebasic parameters whereas for simpler models eitherform may be used.
It is also important to note that the simplifyingassumptions associated with the classical theory couldlead to significant errors when used with actualtransient response tests4,8,12. The exactexpressions for transient and sub-transient parametersare given in References 11 and 18.
In view of the ambiguity associated with theconventional data, it is important to ascertain theassumptions on which it is based, before processingthe data for use in stability studies.
The structure of the machine model as well as thevalues of its parameters have an ef f ect on
computational efficiency. Increasing the number ofrotor circuits, increases the number of states anddecreases the shortest time constant (either explicitor implicit) associated with the model. The increasein the number of states does not have a significanteffect on computational cost. However, a reduction invalues of time constants may require a smallerintegration step making the simulation more costly,unless of course a smaller integration step isrequired for other reasons such as for the simulationof excitation systems. For stability studiesconducted by Ontario Hydro, the limiting value ofintegration step has been dictated by the highfrequency modes associated with excitation controlschemes. A time step in the range of 0.01-0.02 s hasbeen generally found to be adequate for both thedetailed generator models and the exciters.
This paper has described a method of implementing an
improved synchronous machine model into large scalestability programs. The improved model provides forthe following refinements over the conventionalmodels:
- the ability to represent up to three rotorcircuits in each axis;
- accounting for unequal mutual inductances betweenthe d-axis stator, field and rotor body circuits;
- accounting for q-axis saturation more accurately;
- a special provision for handling negative fieldcurrents with rectifier excitation systems.
Experience has shown that the above refinements are
essential for accurate simulation of power systemdynamic performance.
Test procedures and special techniques for analysingdesign data are now available for determiningparameters for the improved model.
The method proposed for implementing the improvedmodel provides sufficient flexibility for simulationof simpler models.
Experiences with the Ontario Hydro and EPRI StabilityPrograms show that the improved model iscomputationally as efficient as the conventionalmodels.
ACKNOWLEDGEMENT
The work reported in this paper was in part funded bythe Electric Power Research Institute under extensionto the Project RP997-2. The incorporation of theimproved machine model into the EPRI Transient-MidtermStability Program was carried out by Arizona PublicService Company based on the above formulations. Theauthors would also like to acknowledge the assistanceprovided by Mrs. Ruth Hern and Miss Elizabeth Mayer inthe preparation of the manuscript.
2051

NOMENCLATURE
Field voltage
d- and q-axis components of armaturecurrent
Field current in reciprocal per unitsystem
Field current in non-reciprocal perunit system
d-axis amortisseur currents
q-axis amortisseur currents
d- and q-axis mutual inductances
Unsaturated value of Lad
d- and q-axis synchronous inductance
d- and q-axis transient inductance
d- and q-axis sub-transient inductance
d- and q-axis transient open circuittime constants in seconds
d- and q-axis sub-transient opencircuit time constant in seconds
Differential operator d/dt
Armature resistance
Time in seconds
d- and q-axis components of armaturevoltage
Exciter output voltage = (Ladu/Rfd) efd
Angle by which q-axis leads the realaxis (radians)
d- and q-axis armature flux linkage
Field flux linkage
d-axis amortisseur flux linkage
q-axis amortisseur flux linkage
Synchronous and instantaneous angularfrequencies rads/s
REFERENCES
1. P.L. Dandeno, R.L. Hauth, and R.P. Schulz,"Effects of Synchronous Machine Modelling in
Large Scale Stability Studies", IEEE Trans. Power
App. Syst., Vol. PAS-92, pp. 574-582, March/April1973.
2. P.L. Dandeno and P. Kundur, "StabilityPerformance of 555 MV.A Turboalternators -
Digital Comparisons with System Operating Tests",IEEE Trans. Power App. Syst., Vol. PAS-93,pp. 767-776, May/June 1974.
3. I.M. Canay, "Causes of Discrepancies on
Calculation of Rotor Quantities and Exact
Equivalent Diagrams of the Synchronous Machine",IEEE Trans. Power App. Syst., Vol. PAS-88,pp. 1114-1120, July 1969.
4. G. Shackshaft, "New Approach to the Determinationof Synchronous Machine Parameters from Tests",Proc. IEE, Vol. 121, No. 11, pp. 1385-1392,1974.
5. R.P. Schulz, W.D. Jones, and D.N. Ewart, "DynamicModels of Turbine Generators Derived from SolidRotor Equivalent Circuits", IEEE Trans. PowerApp. Syst., Vol. PAS-92, pp. 926-933,May/June 1973.
6. M.E. Coultes and W. Watson," Synchronous MachineModels by Standstill Frequency Response Tests",IEEE Trans. Power App. Syst., Vol. PAS-100,pp. 1480-1489, April 1981.
7. P.L. Dandeno, P. Kundur, A.T. Poray and H.M. ZeinEl-Din, "Adaptation and Validation ofTurbogenerator Model Parameters Through On-LineFrequency Response Measurements", IEEE Trans.Power App. Syst., Vol. PAS-100, pp. 1658-1664,April 1981.
8. G. Shackshaft and A.T. Poray, "Implementation ofNew Approach to Determination of SynchronousMachine Parameters from Tests", Proc. IEE,Vol. 124, No. 12, pp. 1170-1178, 1977.
9. F.P. de Mello and L.H. Hannett, "Validation ofSynchronous Machine Models and Derivation ofModel Parameters from Tests", IEEE Trans. PowerApp. Syst., Vol. PAS-100, pp. 662-672,Feb. 1981.
10. P.L. Dandeno, P. Kundur, A.T. Poray, andM. Coultes, "Validation of TurbogeneratorStability Models by Comparison with Power SystemTests", IEEE Trans. Power App. Syst.,Vol. PAS-100, pp. 1637-1645, April 1981.
11. "Determination of Synchronous Machine StabilityStudy Constants", EPRI Report EL1424, Vol.2,Prepared by Ontario Hydro, Dec. 1980.
12. I.M. Canay, "Extended Synchronous Machine Modelfor Calculation of Transient Processes andStability", Electric Machines andElectromechanics: An International Quarterly,pp. 137-150, 1977.
13. "Procedures for the Exchange of Power Plant andLoad Data for Synchronous Stability Studies",IEEE Committee Report, IEEE Trans. Power App.Syst., Vol. PAS-100, pp. 3229-3245, July 1981.
14. A.W. Rankin, "Per-Unit Impedances of SynchronousMachines", AIEE Trans., Vol. 64, Part I,pp. 569-573, Aug. 1945; Part II, pp. 839-841,Dec. 1945.
15. "Excitation System Models for Power SystemStability Studies", IEEE Committee Report, IEEETrans. Power App. Syst., Vol. PAS-100,pp. 494-509, Feb. 1981.
16. C. Concordia, "Synchronous Machines", Wiley,1951.
17. B. Adkins, "The General Theory of ElectricalMachines", Chapman and Hall, 1957.
18. IEEE Joint Working Group on Determination ofSynchronous Machine Stability Constants,"Supplementary Definitions and Associated TestMethods for Obtaining Parameters for SynchronousMachine Stability Study Simulations", IEEETrans. Power App. Syst., Vol. PAS-99,pp. 1625-1693, July/Aug. 1980.
2052
efd
TIId, q
'fd
Ifd
i1d, 2d
i ilq, 2q
L Lad, aq
LaduL Ld, q
L Ld, q
it go
L Ld, q
T Tdo qo
T Tdo, qo
p
Ra
t
V Vd, q
Vf
6
*d,Pq
*fd
* 1d, X d
Pq,P2q,P3qw ,w0

Discussion
T. J. Hammons (Glasgow University, Glasgow G12 8QQ, Scotland,U.K.): The Authors have summarized equations and other features re-quired for implementation of improved synchronous machine modelsinto large scale stability programs. They have stated equations forsimulating up to three rotor circuits on each axis, have accounted forunequal mutual inductances between various diaxis circuits, and haveaccounted for both d-axis and q-axis saturation separately. The methodof implementation given by the Authors is computationally efficientand provides flexibility for use of lower order models where these areadequate.
This Discussor's first comment is posed on computational efficiencyof solution of the generator models which are summarized in Table 1.The Authors state that increase in the number of states associated withan increase in the number of rotor circuits does not have a significanteffect on computational cost. However, a reduction in values ofgenerator time constants may require smaller step lengths of integrationwhich will result in the simulation being more costly. Including morerotor circuits in the model usually entails inclusion of smaller additionalgenerator time constants. It would be useful if the Authors could in-dicate typical computing times for the 10 generator models which aredepicted in Table 1, normalized on that required for the most detailedmodel (Model 3.3). Comparisons should be made with similar computa-tional accuracy where the smaller step lengths of integration which maybe required in the case of the higher order models (on account ofsmaller generator time constants) are employed.
It should be emphasized that models of differing complexity are re-quired in the analysis of various aspects of the transient response oflarge turbine-generators. In calculating peak shaft torques in themachine shaft train following clearance of severe grid system faults withor without auto-reclosure, peak electical torque on fault clearance has asignificant impact on peak shaft torque and hence on accumulativefatigue life expenditure of the shaft. Simulation of the generator indirect-phase quantities with clearance of phase currents at current zeroscan give rise to reduced peak electrical torque and therfore to lessonerous fatigue impact to the shaft. In simulating the generator indirect-phase quantities, P& terms are represented. Much smaller steplengths of integration are necessary if the generator is simulated indirect phase quantities. Computational cost for simulating thegenerator using the more detailed direct-phase model will therefore besignificantly higher. Computational cost for simulating the shaft trainwhere both subsynchronous and supersynchronous shaft torsionalvibrations exist is generally much higher than that of simulating thegenerator.
Simulation of a synchronous-generators in direct phase quantities issummarized by Subramanian and Malik in Ref. [A]. The Authors' com-ments on use of generator models using direct-phase quantities wouldbe greatly appreciated.
Another factor which stiould be considered in selecting generatormodels for transient machine investigations are losses in the generatorwindings and core which contribute to electrical damping in themachine. This phenomenon is particularly important when consideringfatigue impact to the shaft following severe supply system disturbances.This is because generator electrical damping is a very significantmechanism for damping shaft torsional vibrations. Studies undertakenby this Discussor (B,C) for a single-machine-infinite-busbar configura-tion indicate that damping of shaft torsional vibrations depend verymuch on (i) machine MW loading, (ii) power factor of the load, (iii) gridsupply system impedance, (iv) relevant movement of machine rotors asdepicted by eigenvectors, and (v) material damping. Material dampingis very dependent on stress in the various machine shafts.
Generator electrical damping will be adequately simulated if a detail-ed generator model which reproduces electrical 12 R losses at all signifi-cant torsional vibration frequencies is employed. Choice of the currentbase for all rotor (and stator) circuits should yield the correct p.u. 12 Rlosses in the generator. PQ terms should also be included to give correctgenerator losses corresponding to each torsional vibration frequency ofthe rotor shaft.The significance of electrical damping in estimating fatigue life ex-
penditure of turbine-generator shafts will be illustrated by reference tothe following results. Time constants for decay of predominant shafttorsional vibrations due to electrical phenomena and steam dampingfollowing clearance of a 3 phase full-load fault were evaluated for a1300 MW 3000 r.p.m. machine. Time constants for decay of thepredominant shaft torsional vibrations were measured by Fourieranalysis of time responses for transient shaft torque. The 3-phase faultwas applied at the HV generator transformer busbar. A detailedgenerator model with all Pf terms included was used.
2053
Time constants for decay of shaft torsional vibrations due to elec-trical phenomena depend on electrical damping (losses) at particularmodal frequencies. Losses at a particular torsional vibration frequencydepend on power factor of the load, and on nmodal diagram shape.Measured time constant for decay of predominant shaft torsional vibra-tions relating to the 1300MW machine in 12.8 Hz, and 22.0 Hz follow-ing 3-phase fault clearance where steam and material damping is ig-nored are, respectively, 20.9 s, 596.2 s; 6.47 s, 41.6 s; and 3.9 s, 17.2 sfor rotor damper circuit resistance of x0.5, xl.0 and x2.0 the normalvalue respectively. Corresponding time constants following worst-casemal-synchronization are respectively 5.2 s, 41.0 s; 2.5 s, 15.3 s; and 1.6s, 7.6 s for damper circuit resistances of xO.5, xl.0 and x2.0 the normalvalues respectively. Time constants for decay of shaft torsional vibra-tions at low frequencies due to electrical phenomena alone are muchshorter following malsynchronization due to increased damping occa-sioned by higher circuit losses when the main rotor flux lies along thedirect-axis of the synchronous-generator.Increasing dampere circuitresistance shortens time constants for decay of predominant low fre-quency vibrations on account of increased rotor circuit losses this in-crease in resistance incurs.Theoretical time constants for decay of predominant shaft torsional
vibrations due to steam action alone at rated load computed fromeigenvectors, rotor inertias and steam damping coefficients for decay ofthe 12.8 Hz, 22.0 Hz, 30.9 Hz, 37.9 Hz, 64.6 Hz, 117.1 Hz, 117.4 Hz,116.8 Hz, 104.4 Hz and the 41.0 Hz vibrations were 14.2 s, 12.3 s, 9.8 s,2.2 s, 1.44 s, 14.5 s,14.6 s, 14.5 s, 14.1 s and 3122.0 s respectively. Theabove time constants were calculated from the modal energy of thevibration and energy lost per second due to damping using thealgorithm:
k
Tm = 2 '-i = 1
k
[Ji(Xmi2)]/ >i = 1
[PoDi (Xmi)2] seconds
where suffix m = mode of vibration, i = rotor, J = 2H/cos = rotor in-ertia, X = eigenvector, Po = total p.u. turbine torque, Di =PoiFL/cos = steam damping coefficient for turbine i corresponding togenerator MVA rating, and ws is the angular frequency of the grid sup-ply. The 1.44 s time constant relates to a vibration where relative tor-sional movement of the HP turbine rotor is significant, while the 3122.0s time constant corresponds to an exciter rotor vibration where relativemovement of all other rotors is quite small. Time constants deducedfrom the real part of eigenvalues are similar to those calculated from theenergy considerations discussed above. Time constants for decay ofshaft torsional vibrations due to steam action alone, while being in-versely proportional to load, differ appreciably for each mode of tor-sional vibration of the shaft and blades. As relative movement of thegenerator rotor depicted by eigenvectors for the vibrations which decaywith the time constants of 1.44 s and 3122.0 s (64.6 Hz and 41.0 Hzrespectively) is small amplitude of these torsional vibrations following asevere network disturbance will also be small. This is because torsionalvibrations are excited by torsional movement of the generator rotorwhich results from the transient electrical torque following a distur-bance on the grid supply.
In large-scale stability studied, the stator transients represented by theP w d and P W q terms are neglected so that stator currents aresinusoidal. For the purpose of solving the interconnecting networkequations, rotating real and imaginary axes are used. Could theAuthors indicate how their algorithms for simulating synchronous-generators in multi-machine networks could be adapted to yield realisticrotor and stator circuit losses (including transmission system losses) insimulations where both subsynchronous and supersynchronous tor-sional vibrations of the generator rotor occur in applications where themodels are employed to estimate accumulative fatigue life expenditureof machine shafts. The Authors' comments on the most efficientgenerator models for predicting damping of torsional vibrations inturbine-generator shafts of generators in multi-machine systems follow-ing severe grid supply network disturbances would be very much ap-preciated.
REFERENCES
[A] B. E. Subramaniam and 0. P. Malik, "Digital simulation of asynchronous-generator in direct-phase quantities" Proc. IEE,1971, Vol. 118, (1), pp. 153-160.
[B] T. J. Hammons, "Accumulative fatigue life expenditure ofturbine-generator shafts following worst-case system

2054
disturbances" IEEE Trans. (PAS), 1982, Vol. 101, (7), pp.2364-74.
[C] T. J. Hammons, "Electrical damping and its effect on ac-cumulative fatigue life expenditure of turbine-generator shaftsfollowing worst-case supply system disturbances" Paper 82 JPGC612-0, presented at the 1982 IEEE/ASME/ASCE Joint PowerGeneration Conference, Denver, CO, USA, October 17-21, 1982.
Manuscript received March 1, 1983.
P. Kundur and P. L. Dandeno: The authors wish to thank Professor T.J. Hammons for his comments. His first comment refers to the in-fluence of the generator model structure on computational costsassociated with transient stability similations. He suggests that we pro-vide a comparison of computer times for the 10 generator model struc-tures identified in Table I of the paper. The computational cost of astability simulation is a complex function of the size and detail ofsystem representation, and numerical techniques used. The structuresof the generator models used have only a small influence on the overallcost, particularly in situations where the integration time step is deter-mined by the models used for other components such as the excitationsystems. for large scale stability studies, the increase in the number ofstates as a result of increasing the number of generator rotor circuits hashardly any influence on the computational cost. In fact, if by increasingthe number of rotor circuits the dynamic (subtransient or sub-subtransient) saliency is either reduced or eliminated, the computational
cost actually decreases due to improvements in the convergence ofiterative solutions used for the network representations.The rest of Professor Hammons' discussion deals with the re-
quirements for modelling of synchronous machines for simulationsconcerned with the impact of network switching on turbine-generatorshaft torques. For such studies, it is essential to include the generatorstator and transmission network transients. It is also important to ac-count for circuit breaker operation as influenced by current zero in eachphase. This type of simulation is best carried out using an Elec-tromagnetics Transients Program[A]. We agree with Professor Ham-mons that the electrical damping introduced by the generator is impor-tant in such studies. The generator may be represented in terms of eitherd-q-o quantities or direct-phase quantities.
In our paper we were concerned with the implementation ofgenerator models into stability programs. Modelling requirements forsuch programs are significantly different from those of an elec-tromagnetic transients program.
REFERENCES
[A] V. Brandwajn, H. W. Dommel, "A new method for interfacinggenerator models with an electromagnetic transients program",IEEE Conference Proceedings PICA-77, pp. 260-265, May, 1977,Toronto, Canada.
Manuscript received April 7, 1983.