Embed Size (px)
DESCRIPTION
Servmomecanismo
Citation preview
Definições:
Sistema de controle
- Consiste em subsistemas e processos (ou plantas) reunidos com o propósito de controlar as saídas dos
processos.
Exemplo:
- Uma caldeira produz calor como resultado do
fluxo de combustível;
- �este processo, subsistemas chamados válvulas de
combustível e atuadores de válvulas de combustível são
usados para regular a temperatura de uma sala
controlando a saída de calor da caldeira;
- Outros subsistemas como termostatos que se
comportam como sensores, medem a temperatura da sala
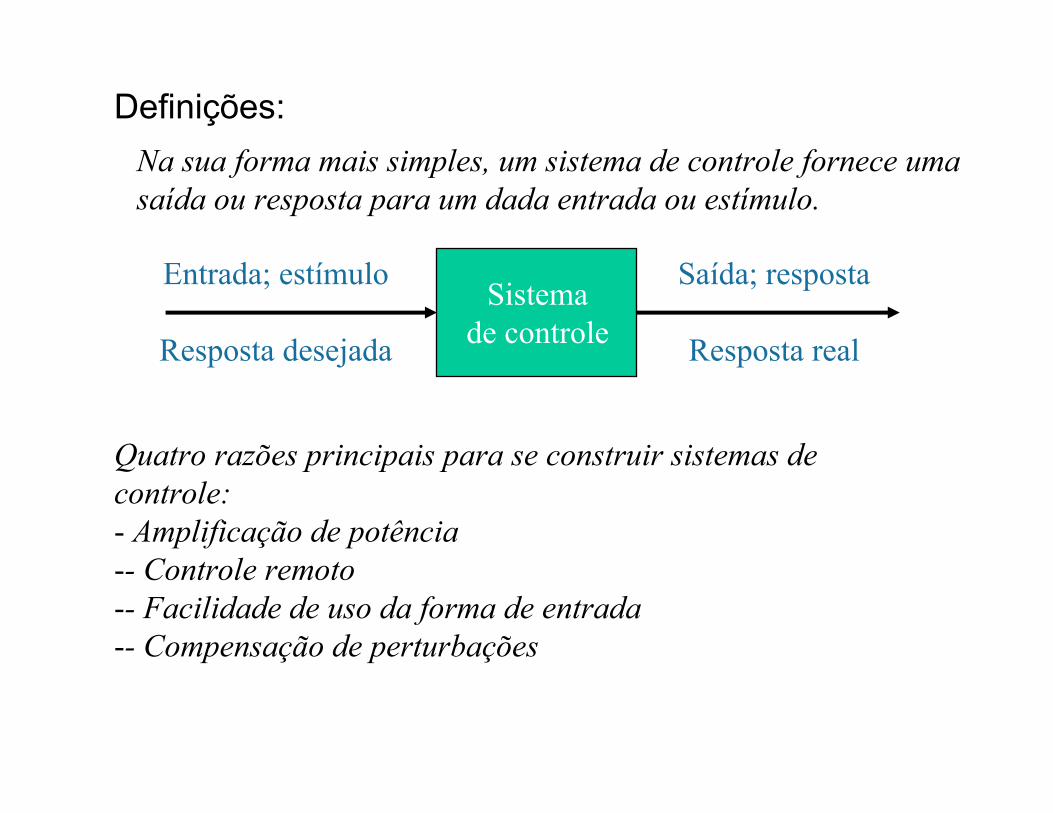
�a sua forma mais simples, um sistema de controle fornece uma
saída ou resposta para um dada entrada ou estímulo.
Quatro razões principais para se construir sistemas de
controle:
- Amplificação de potência-- Controle remoto-- Facilidade de uso da forma de entrada-- Compensação de perturbações
Entrada; estímulo
Resposta desejada
Sistemade controle
Saída; resposta
Resposta real
Definições:
Características de Resposta e Configurações de Sistema
Entrada e Saída:
-Um sistema fornece uma saída ou resposta para uma da entrada ou estímulo;
- Entrada � Representa a resposta desejada;
-- Saída � Representa a resposta real;
Exemplo:
Quando o botão do quarto andar de um elevador é pressionado
no térreo, o elevador sobe até o quarto andar com um velocidade
e com uma precisão de nivelamento projetados para o conforto
do passageiro.
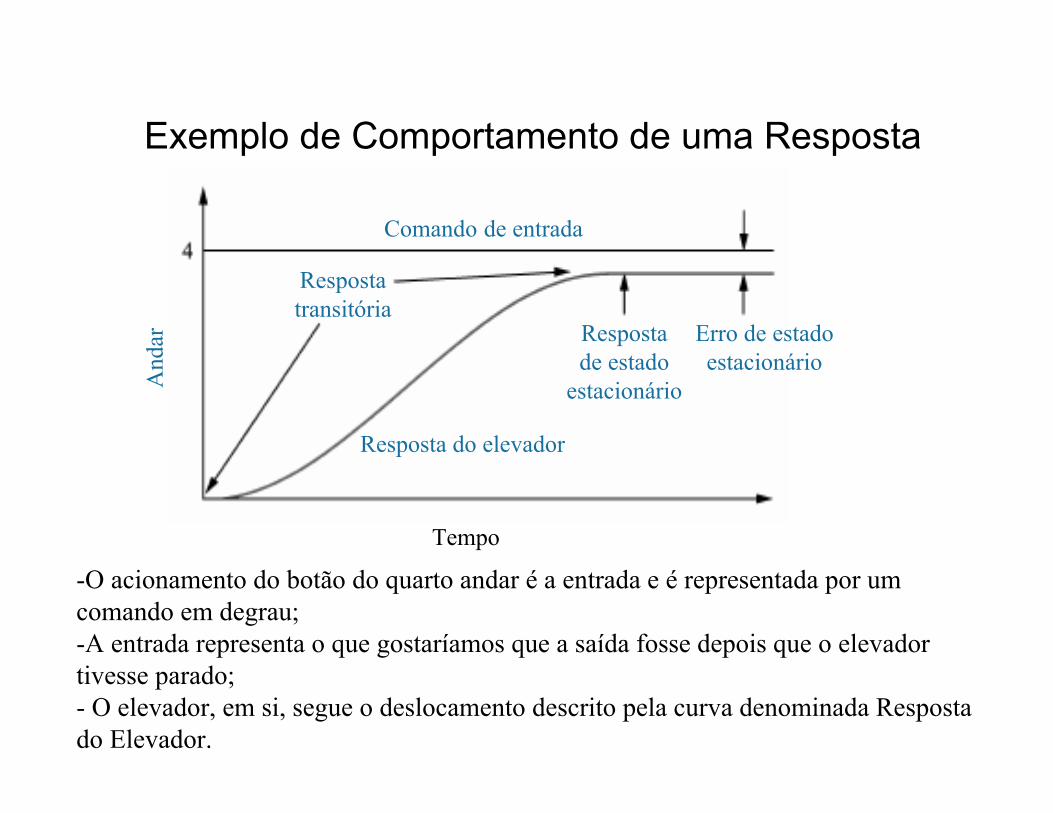
Exemplo de Comportamento de uma Resposta
Comando de entrada
And
ar
Respostatransitória
Resposta do elevador
Erro de estadoestacionário
Respostade estado
estacionário
Tempo
-O acionamento do botão do quarto andar é a entrada e é representada por um comando em degrau;-A entrada representa o que gostaríamos que a saída fosse depois que o elevador tivesse parado;- O elevador, em si, segue o deslocamento descrito pela curva denominada Resposta do Elevador.
Dois fatores fazem a saída ser diferente da entrada:
-Primeiro: Resposta Transitória- Mudança instantânea da entrada contra a mudança gradual da saída; -Motivo: entidades físicas não podem mudar seus estados (por exemplo, posição ou velocidade) instantaneamente;- O estado se altera segundo uma trajetória que se relaciona com o dispositivo físico e ao modo como armazena ou dissipa energia;- Assim, o elevador é submetido a uma mudança gradual à medida que sobe do primeiro para o quarto andar.- Esta parte da resposta é chamada de Resposta Transitória.
-Segundo: Erro de Estado Estacionário- Depois da resposta transitória, um sistema físico tende à resposta de estado estacionário, que é a aproximação da resposta comandada ou desejada;- Para o exemplo do elevador, esta resposta ocorre quando o elevador alcança o quarto andar;-A precisão no nivelamento do elevador com o piso do andar poderia tornar a saída diferente da entrada.
Transdutor deEntrada
Entrada ouReferência
JunçãoSomadora
++
Processoou Planta
++
JunçãoSomadora
Controlador
Perturbação 1 Perturbação 2
Saídaou
Variável Controlada
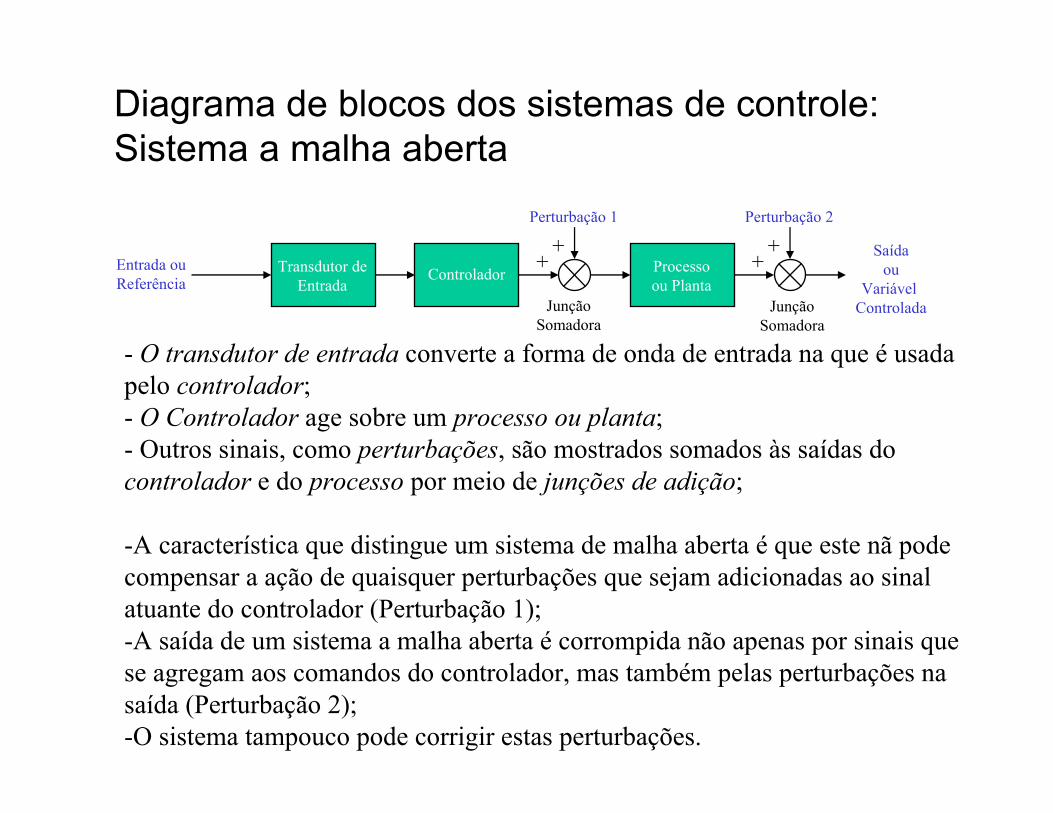
Diagrama de blocos dos sistemas de controle:
Sistema a malha aberta
- O transdutor de entrada converte a forma de onda de entrada na que é usada pelo controlador;- O Controlador age sobre um processo ou planta;- Outros sinais, como perturbações, são mostrados somados às saídas do controlador e do processo por meio de junções de adição;
-A característica que distingue um sistema de malha aberta é que este nã pode compensar a ação de quaisquer perturbações que sejam adicionadas ao sinal atuante do controlador (Perturbação 1);-A saída de um sistema a malha aberta é corrompida não apenas por sinais que se agregam aos comandos do controlador, mas também pelas perturbações na saída (Perturbação 2);-O sistema tampouco pode corrigir estas perturbações.
Transdutor deEntrada
Entrada ouReferência
JunçãoSomadora
++
Processoou Planta
++
JunçãoSomadora
Perturbação 1 Perturbação 2
Saídaou
Variável Controlada
+
-
Controlador
Transdutor de Saída
ou Sensor
Erroou Sinal Atuante
Diagrama de blocos dos sistemas de controle:
Sistema a malha fechada
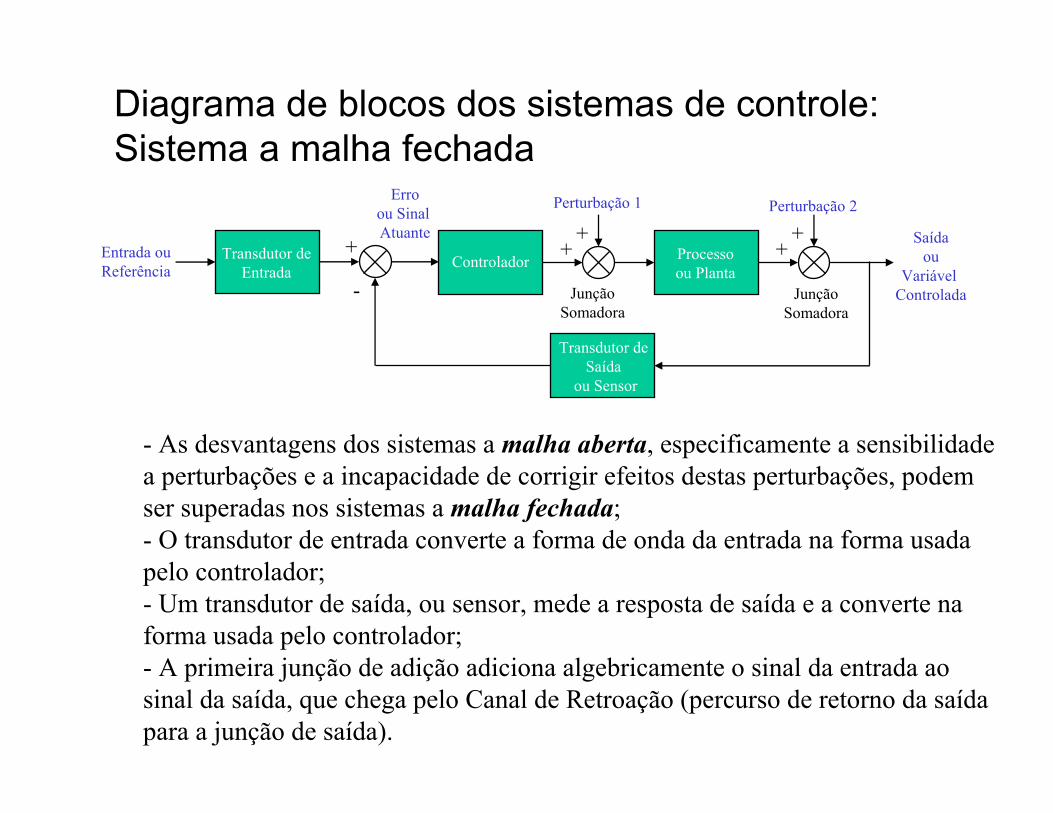
- As desvantagens dos sistemas a malha aberta, especificamente a sensibilidade a perturbações e a incapacidade de corrigir efeitos destas perturbações, podem ser superadas nos sistemas a malha fechada;- O transdutor de entrada converte a forma de onda da entrada na forma usada pelo controlador;- Um transdutor de saída, ou sensor, mede a resposta de saída e a converte na forma usada pelo controlador;- A primeira junção de adição adiciona algebricamente o sinal da entrada ao sinal da saída, que chega pelo Canal de Retroação (percurso de retorno da saída para a junção de saída).
Transdutor deEntrada
Entrada ouReferência
JunçãoSomadora
++
Processoou Planta
++
JunçãoSomadora
Perturbação 1 Perturbação 2
Saídaou
Variável Controlada
+
-
Controlador
Transdutor de Saída
ou Sensor
Erroou Sinal Atuante
Diagrama de blocos dos sistemas de controle:
Sistema a malha fechada
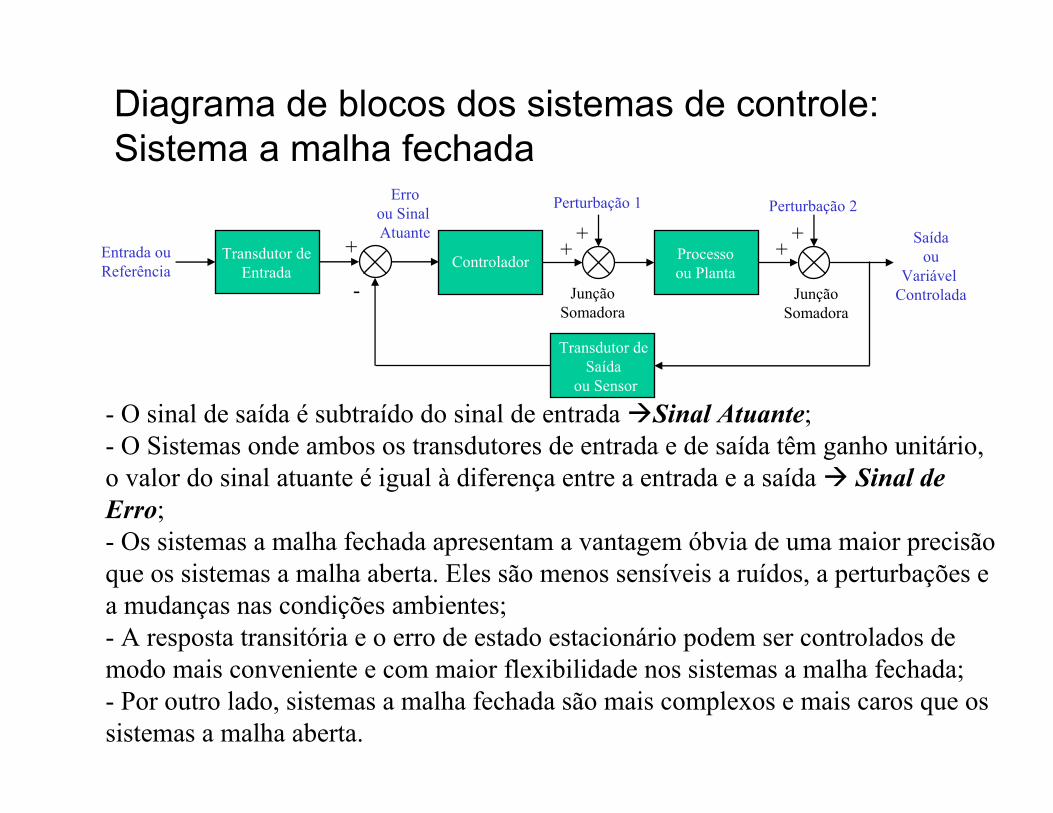
- O sinal de saída é subtraído do sinal de entrada �Sinal Atuante;- O Sistemas onde ambos os transdutores de entrada e de saída têm ganho unitário, o valor do sinal atuante é igual à diferença entre a entrada e a saída � Sinal de
Erro;- Os sistemas a malha fechada apresentam a vantagem óbvia de uma maior precisão que os sistemas a malha aberta. Eles são menos sensíveis a ruídos, a perturbações e a mudanças nas condições ambientes;- A resposta transitória e o erro de estado estacionário podem ser controlados de modo mais conveniente e com maior flexibilidade nos sistemas a malha fechada;- Por outro lado, sistemas a malha fechada são mais complexos e mais caros que os sistemas a malha aberta.
Objetivos de Análise e de Projeto
Primeiro Objetivo: Resposta Transitória-A resposta transitória é importante por razões estruturais: uma resposta transitória excessivamente rápida poderia provocar danos físicos permanentes
- Em um sistema de controle, os parâmetros são ajustados ou os componentes são projetados para produzir uma resposta transitória desejada
Segundo Objetivo: Resposta de Estado Estacionário- Esta resposta se parece com a entrada e é usualmente o que permanece depois
que a componente transitória se reduz a zero;- O projeto deve estar interessado na precisão da resposta de estado
estacionário;- Os erros de estado estacionário devem ser definidos quantitativamente; eles
devem ser analisados; e então deve ser projetada a ação corretiva de modo a reduzi-los;
Objetivos de Análise e de Projeto
Terceiro Objetivo: Estabilidade-A resposta total de um sistema é a soma da Resposta Natural com a Resposta Forçada� Resposta Total = Resposta �atural + Resposta Forçada;- A resposta natural descreve o modo pelo qual o sistema dissipa ou acumula energia. A forma ou a natureza desta resposta é dependente somente do sistema, não da entrada;- Por outro lado, a forma ou a natureza da resposta forçada é dependente da entrada;- Para que um sistema de controle seja útil, a resposta natural deve:
1 – Tender a zero, desta maneira deixando somente a resposta forçada; ou2 – Oscilar;
- Os sistemas de controle devem, portanto, ser projetados para serem estáveis. Sua resposta natural deve tender a zero quanto o tempo tende a infinito;-Se o sistema for estável, podem ser projetada as características adequadas do erro de estado estacionário e da resposta transitória.
Objetivos de Análise e de Projeto
Outros Objetivos (considerações)
-Fatores que afetam a seleção do hardware: como o dimensionamento do motor para atender os requisitos de potência e escolha de sensores de acordo com a precisão necessária, devem ser considerados na fase inicial do projeto;
- Custo: os projetistas de sistemas de controle não podem criar projetos sem considerar seu impacto econômico. Considerações como distribuição de orçamento e preço competitivo devem guiar o engenheiro;
- Robustez: parâmetros do sistema considerados constantes durante o projeto da resposta transitória, dos erros de estado estacionário e da estabilidade mudam ao longo do tempo quando o sistema real é construído. Desta maneira, o desempenho do sistema também muda ao longo do tempo;- Assim, o engenheiro deve criar um projeto robusto para que o sistema não seja sensível a mudanças nos parâmetros.
Potenciômetro
Ângulo deazimute de
entrada desejado
Potenciômetro
Ângulo deazimute de
entrada desejado
Antena
Antena
PotenciômetroMotor
Ângulo deazimute de
saída
Ângulo de azimutede saída
Amplificador diferencial eamplificador de potência
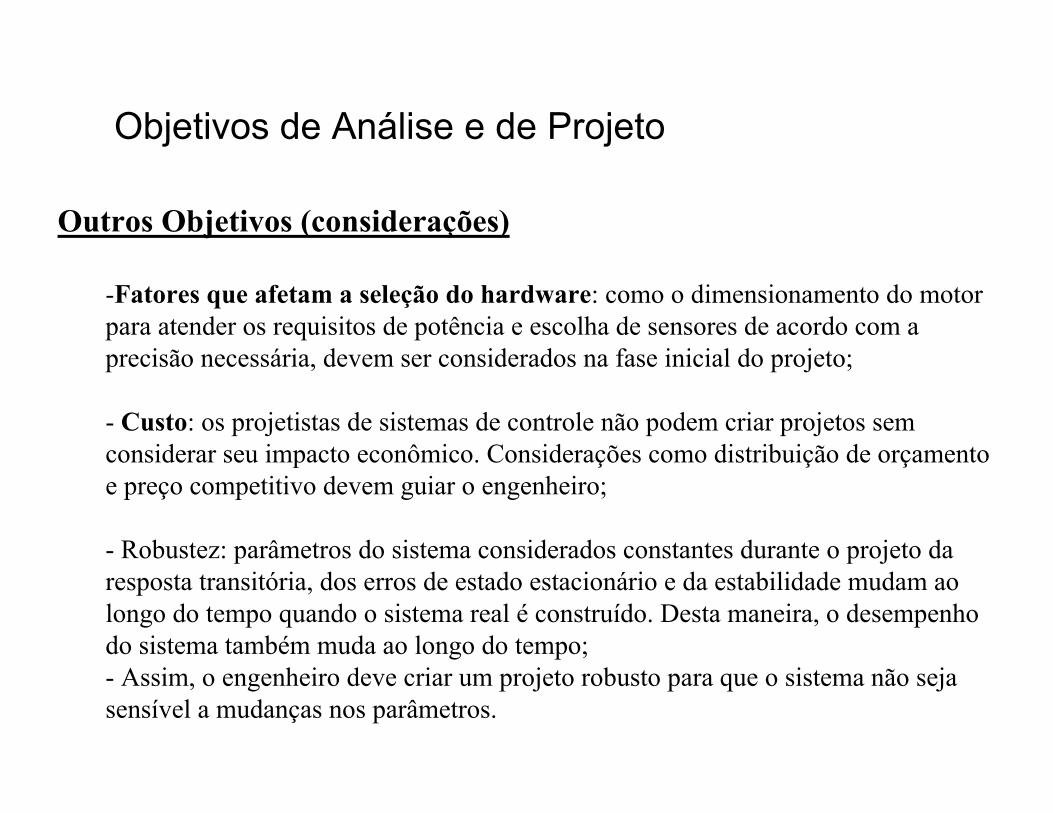
Exemplo de projeto : Sistema de controle de
posição da antena em azimute
Conceito do sistema
Layout detalhado
Fonte: Livro Texto – Engenharia de sistemas
de controle, �orman S. �ise, pp. 13-15.
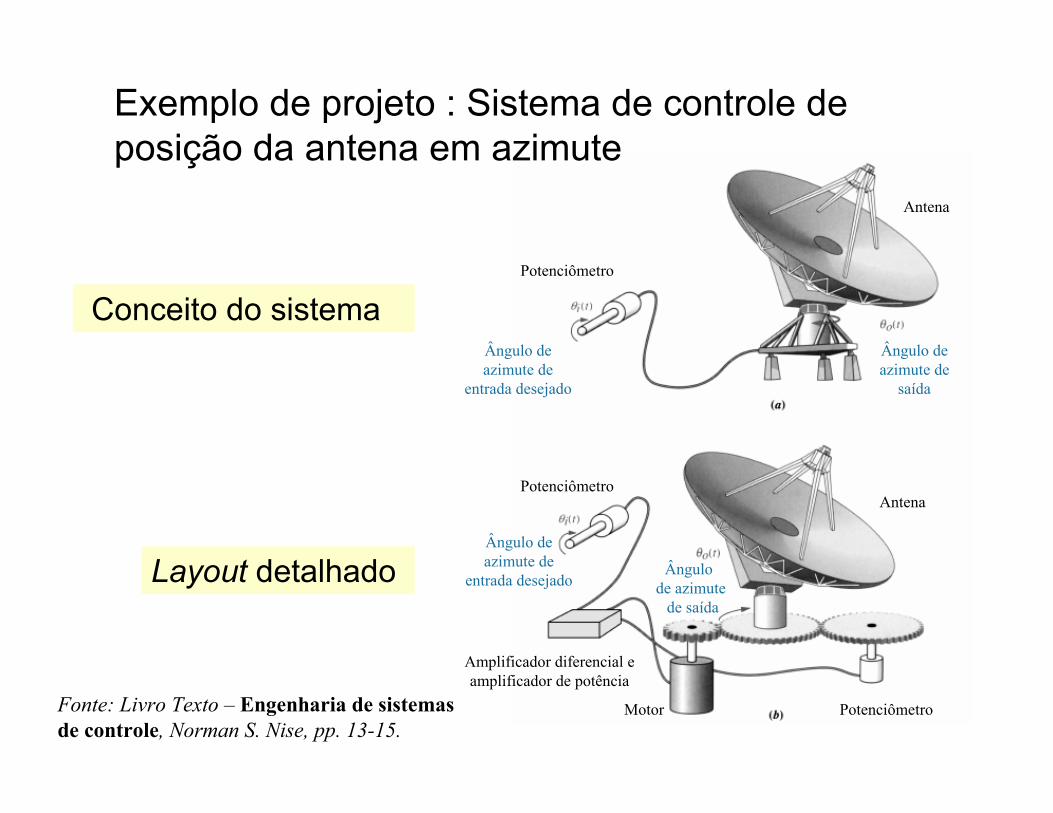
Exemplo de projeto : Sistema de controle de
posição da antena em azimute
Esquemático do
sistema
Diagramas de
Blocos Funcional
Potenciômetro
Amplificadores
Potenciômetro
Potenciômetro
Potenciômetro
Motor
Resistênciada armadura
Armadura
Campoconstante
Engrenagem
Engrenagem
EngrenagemInércia
Amortecimentoviscoso
Amplificadordiferencial
e depotência
K
Transdutorde entrada
Sensor(transdutor de saída)
Entradaangular
Tensãoproporcional
àentrada
Junçãode adição
Erroou
Sinalatuante
Controlador
Plantaou
Processo
Saídaangular
Tensãoproporcional
à saída
Amplific.de sinale de
potência
Motor,carga e engre-nagens
Fonte: Livro Texto – Engenharia de sistemas
de controle, �orman S. �ise, pp. 13-15.
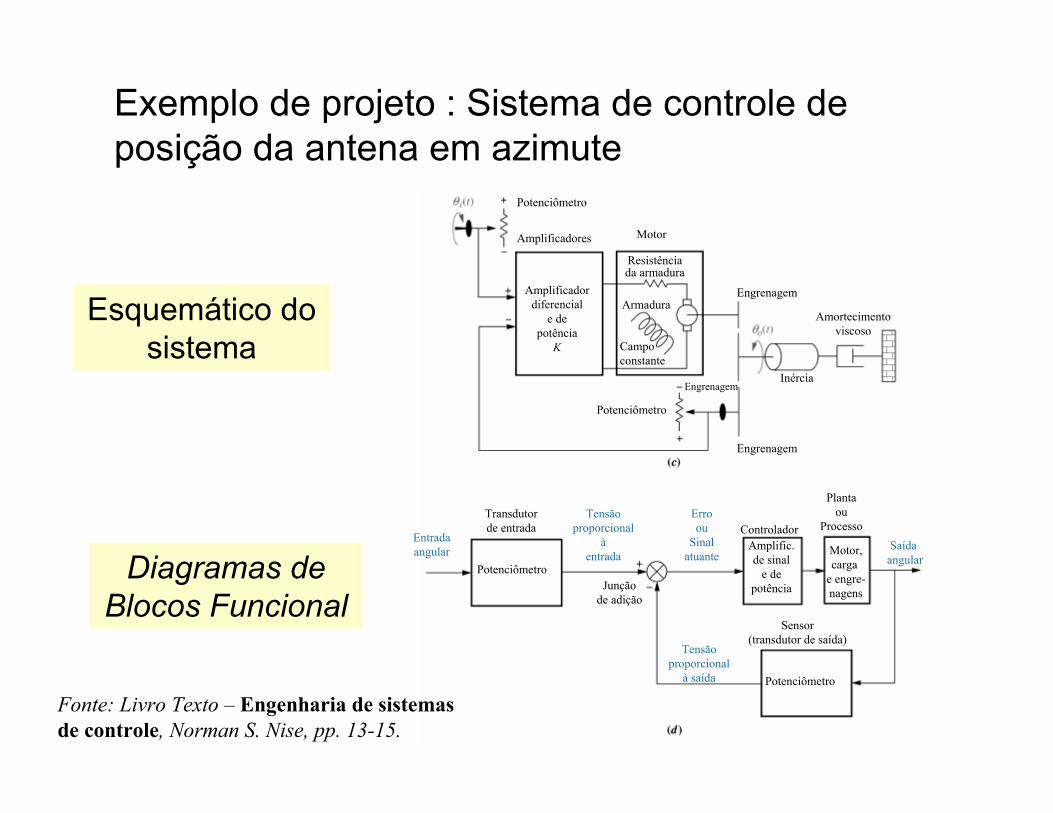
Exemplo de projeto : Sistema de controle de
posição da antena em azimute
Saída comganho alto
Saída comganho baixo
EntradaResposta
Tempo
- Resposta de um
sistema de controle
de posição
mostrando o efeito
de valores grande e
pequeno para o
ganho do
controlador na
resposta de saída
Fonte: Livro Texto – Engenharia de sistemas
de controle, �orman S. �ise, pp. 13-15.
Determine umsistemafísico e as
especificaçõesa partir dosrequisitos
Desenhe umdiagrama de
blocosfuncional
Transformeo sistemafísico em
um esquema
Use o esquemapara obter umdiagrama deblocos, umdiagrama defluxo de sinal,
ou uma represen-tação no espaço
de estados
Se houver blocosmúltiplos, reduzao diagrama deblocos em umúnico blocoou sistema amalha fechada
Analise,projete e
teste para verque requisitose especificaçõessão compatíveis
Passo 1 Passo 2 Passo 3 Passo 4 Passo 5 Passo 6
Procedimentos de Projeto - Passos
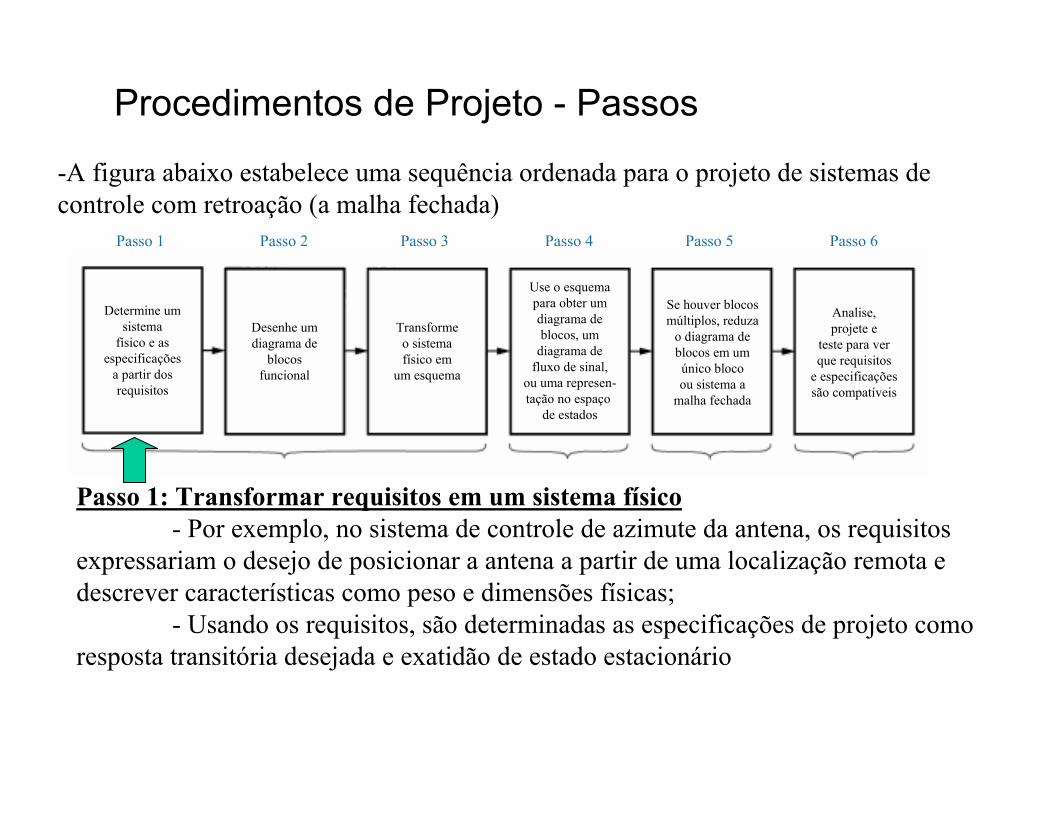
-A figura abaixo estabelece uma sequência ordenada para o projeto de sistemas de controle com retroação (a malha fechada)
Passo 1: Transformar requisitos em um sistema físico
- Por exemplo, no sistema de controle de azimute da antena, os requisitos expressariam o desejo de posicionar a antena a partir de uma localização remota e descrever características como peso e dimensões físicas;
- Usando os requisitos, são determinadas as especificações de projeto como resposta transitória desejada e exatidão de estado estacionário
Determine umsistemafísico e as
especificaçõesa partir dosrequisitos
Desenhe umdiagrama de
blocosfuncional
Transformeo sistemafísico em
um esquema
Use o esquemapara obter umdiagrama deblocos, umdiagrama defluxo de sinal,
ou uma represen-tação no espaço
de estados
Se houver blocosmúltiplos, reduzao diagrama deblocos em umúnico blocoou sistema amalha fechada
Analise,projete e
teste para verque requisitose especificaçõessão compatíveis
Passo 1 Passo 2 Passo 3 Passo 4 Passo 5 Passo 6
Procedimentos de Projeto - Passos
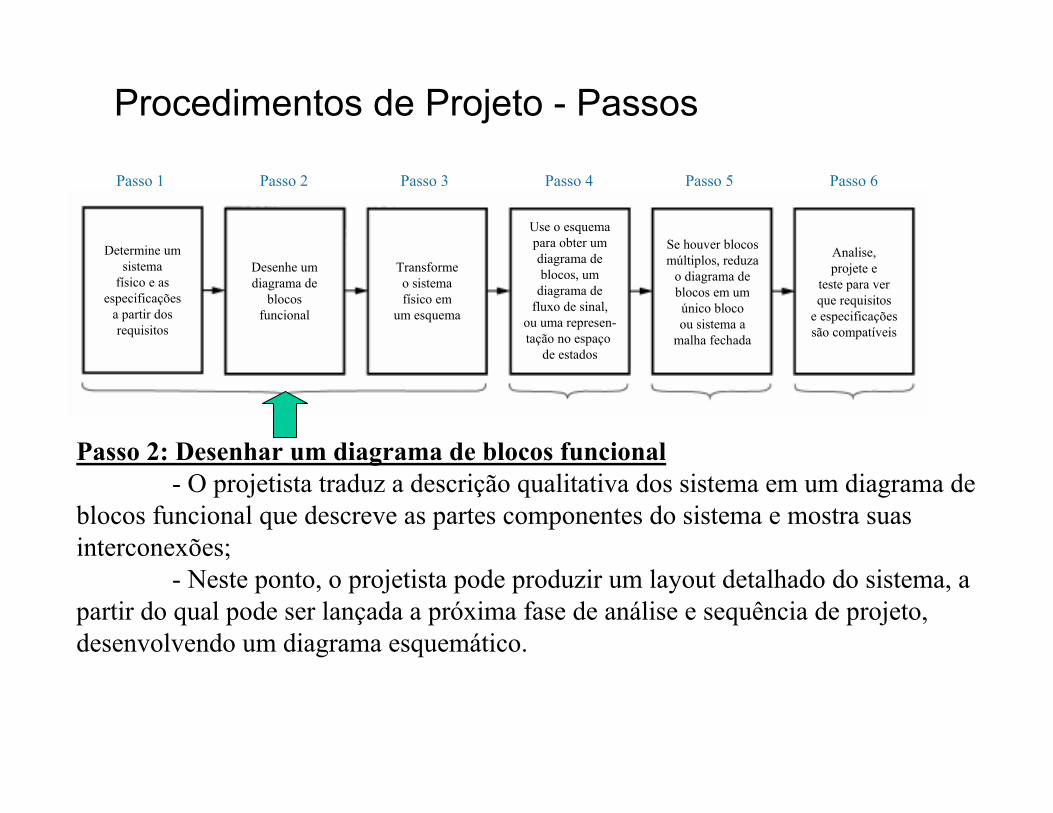
Passo 2: Desenhar um diagrama de blocos funcional
- O projetista traduz a descrição qualitativa dos sistema em um diagrama de blocos funcional que descreve as partes componentes do sistema e mostra suas interconexões;
- Neste ponto, o projetista pode produzir um layout detalhado do sistema, a partir do qual pode ser lançada a próxima fase de análise e sequência de projeto, desenvolvendo um diagrama esquemático.
Determine umsistemafísico e as
especificaçõesa partir dosrequisitos
Desenhe umdiagrama de
blocosfuncional
Transformeo sistemafísico em
um esquema
Use o esquemapara obter umdiagrama deblocos, umdiagrama defluxo de sinal,
ou uma represen-tação no espaço
de estados
Se houver blocosmúltiplos, reduzao diagrama deblocos em umúnico blocoou sistema amalha fechada
Analise,projete e
teste para verque requisitose especificaçõessão compatíveis
Passo 1 Passo 2 Passo 3 Passo 4 Passo 5 Passo 6
Procedimentos de Projeto - Passos
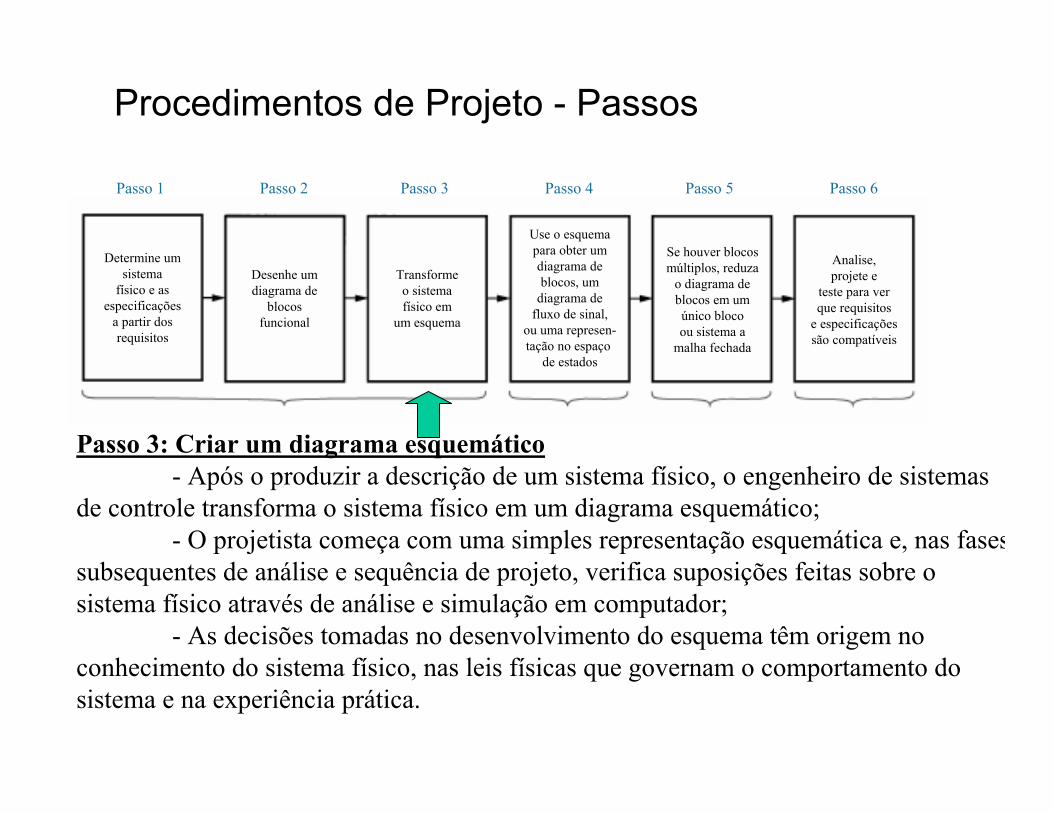
Passo 3: Criar um diagrama esquemático
- Após o produzir a descrição de um sistema físico, o engenheiro de sistemas de controle transforma o sistema físico em um diagrama esquemático;
- O projetista começa com uma simples representação esquemática e, nas fases subsequentes de análise e sequência de projeto, verifica suposições feitas sobre o sistema físico através de análise e simulação em computador;
- As decisões tomadas no desenvolvimento do esquema têm origem noconhecimento do sistema físico, nas leis físicas que governam o comportamento do sistema e na experiência prática.
Determine umsistemafísico e as
especificaçõesa partir dosrequisitos
Desenhe umdiagrama de
blocosfuncional
Transformeo sistemafísico em
um esquema
Use o esquemapara obter umdiagrama deblocos, umdiagrama defluxo de sinal,
ou uma represen-tação no espaço
de estados
Se houver blocosmúltiplos, reduzao diagrama deblocos em umúnico blocoou sistema amalha fechada
Analise,projete e
teste para verque requisitose especificaçõessão compatíveis
Passo 1 Passo 2 Passo 3 Passo 4 Passo 5 Passo 6
Procedimentos de Projeto - Passos
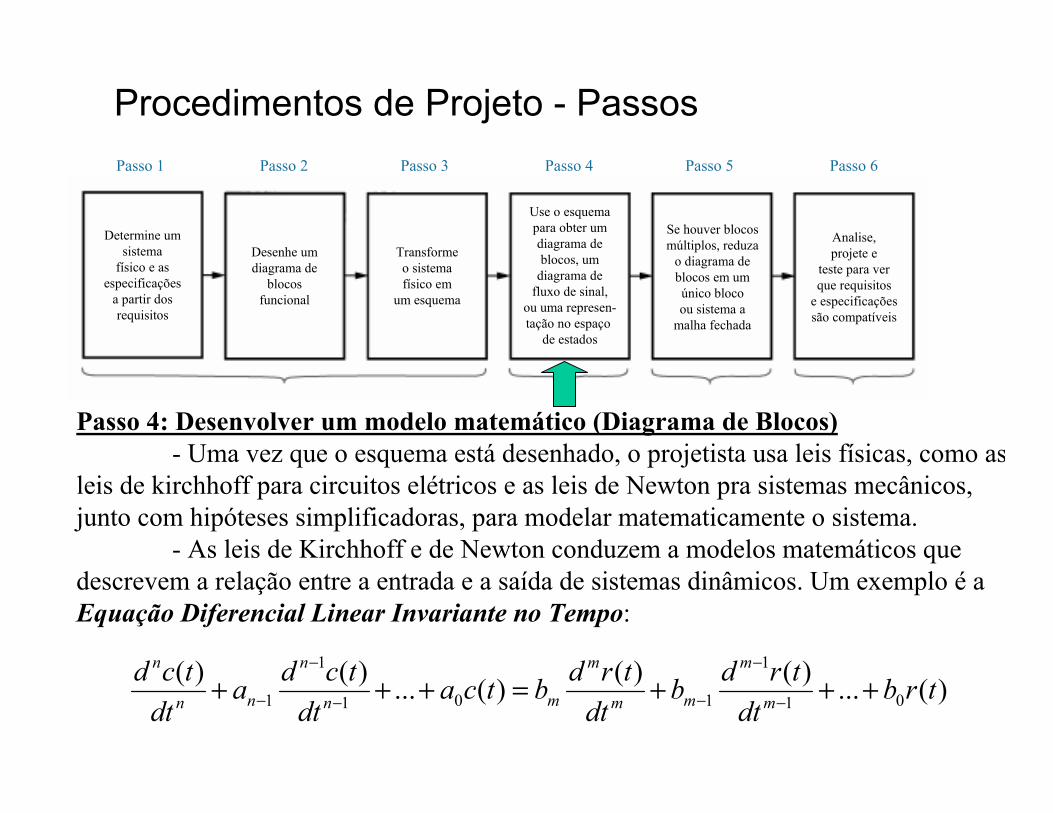
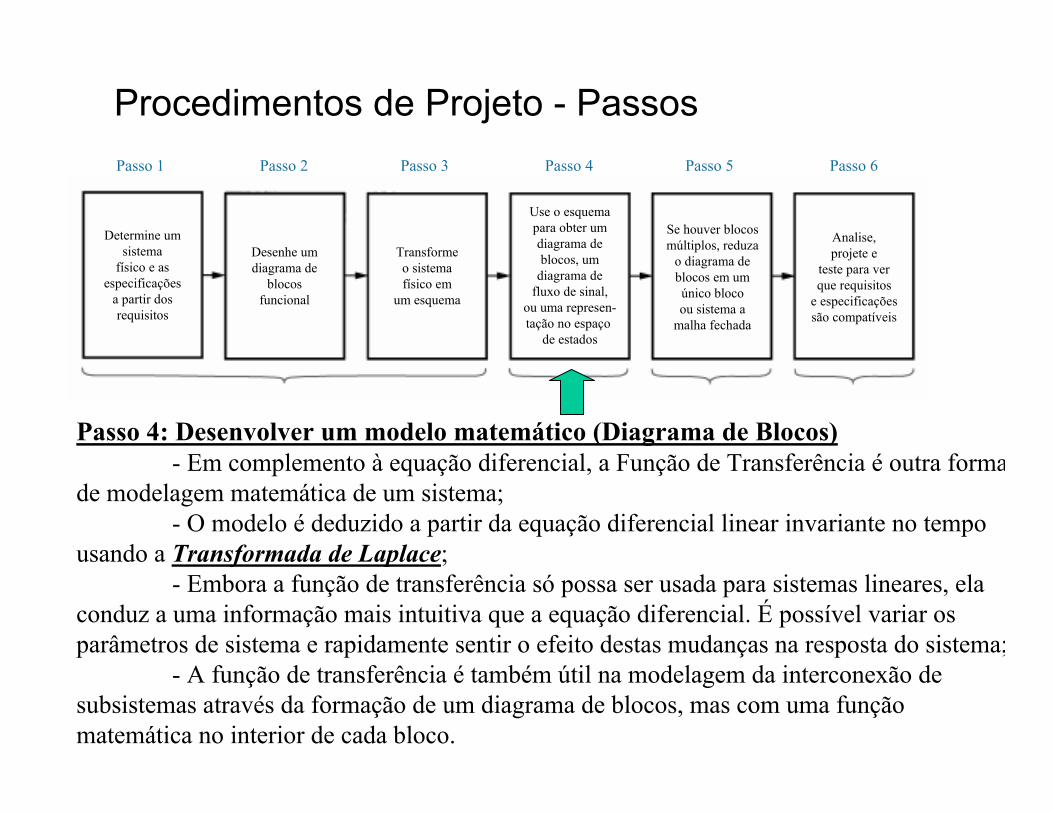
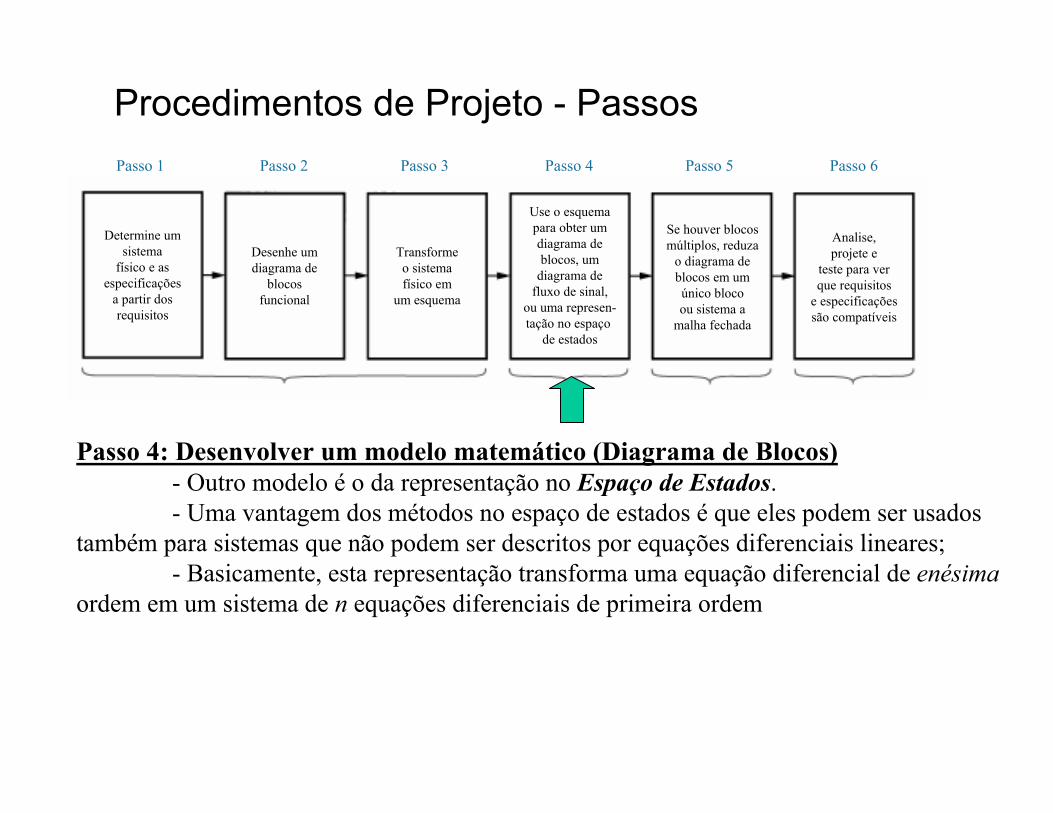
Passo 4: Desenvolver um modelo matemático (Diagrama de Blocos)
- Uma vez que o esquema está desenhado, o projetista usa leis físicas, como as leis de kirchhoff para circuitos elétricos e as leis de Newton pra sistemas mecânicos, junto com hipóteses simplificadoras, para modelar matematicamente o sistema.
- As leis de Kirchhoff e de Newton conduzem a modelos matemáticos que descrevem a relação entre a entrada e a saída de sistemas dinâmicos. Um exemplo é a Equação Diferencial Linear Invariante no Tempo:
)(...)()(
)(...)()(
01
1
101
1
1 trbdt
trdb
dt
trdbtca
dt
tcda
dt
tcdm
m
mm
m
mn
n
nn
n
+++=+++−
−
−−
−
−
Determine umsistemafísico e as
especificaçõesa partir dosrequisitos
Desenhe umdiagrama de
blocosfuncional
Transformeo sistemafísico em
um esquema
Use o esquemapara obter umdiagrama deblocos, umdiagrama defluxo de sinal,
ou uma represen-tação no espaço
de estados
Se houver blocosmúltiplos, reduzao diagrama deblocos em umúnico blocoou sistema amalha fechada
Analise,projete e
teste para verque requisitose especificaçõessão compatíveis
Passo 1 Passo 2 Passo 3 Passo 4 Passo 5 Passo 6
Procedimentos de Projeto - Passos
Passo 4: Desenvolver um modelo matemático (Diagrama de Blocos)
- Em complemento à equação diferencial, a Função de Transferência é outra forma de modelagem matemática de um sistema;
- O modelo é deduzido a partir da equação diferencial linear invariante no tempo usando a Transformada de Laplace;
- Embora a função de transferência só possa ser usada para sistemas lineares, ela conduz a uma informação mais intuitiva que a equação diferencial. É possível variar os parâmetros de sistema e rapidamente sentir o efeito destas mudanças na resposta do sistema;
- A função de transferência é também útil na modelagem da interconexão de subsistemas através da formação de um diagrama de blocos, mas com uma função matemática no interior de cada bloco.
Determine umsistemafísico e as
especificaçõesa partir dosrequisitos
Desenhe umdiagrama de
blocosfuncional
Transformeo sistemafísico em
um esquema
Use o esquemapara obter umdiagrama deblocos, umdiagrama defluxo de sinal,
ou uma represen-tação no espaço
de estados
Se houver blocosmúltiplos, reduzao diagrama deblocos em umúnico blocoou sistema amalha fechada
Analise,projete e
teste para verque requisitose especificaçõessão compatíveis
Passo 1 Passo 2 Passo 3 Passo 4 Passo 5 Passo 6
Procedimentos de Projeto - Passos
Passo 4: Desenvolver um modelo matemático (Diagrama de Blocos)
- Outro modelo é o da representação no Espaço de Estados.- Uma vantagem dos métodos no espaço de estados é que eles podem ser usados
também para sistemas que não podem ser descritos por equações diferenciais lineares;- Basicamente, esta representação transforma uma equação diferencial de enésima
ordem em um sistema de n equações diferenciais de primeira ordem
Determine umsistemafísico e as
especificaçõesa partir dosrequisitos
Desenhe umdiagrama de
blocosfuncional
Transformeo sistemafísico em
um esquema
Use o esquemapara obter umdiagrama deblocos, umdiagrama defluxo de sinal,
ou uma represen-tação no espaço
de estados
Se houver blocosmúltiplos, reduzao diagrama deblocos em umúnico blocoou sistema amalha fechada
Analise,projete e
teste para verque requisitose especificaçõessão compatíveis
Passo 1 Passo 2 Passo 3 Passo 4 Passo 5 Passo 6
Procedimentos de Projeto - Passos
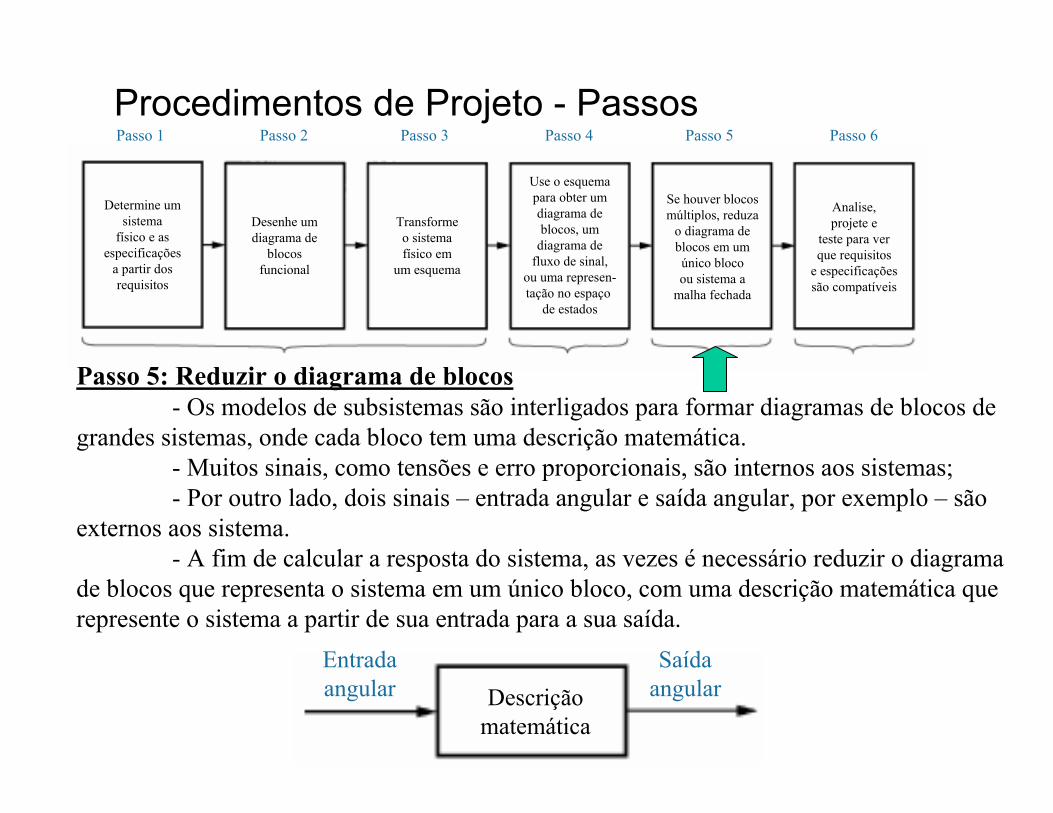
Passo 5: Reduzir o diagrama de blocos
- Os modelos de subsistemas são interligados para formar diagramas de blocos de grandes sistemas, onde cada bloco tem uma descrição matemática.
- Muitos sinais, como tensões e erro proporcionais, são internos aos sistemas;- Por outro lado, dois sinais – entrada angular e saída angular, por exemplo – são
externos aos sistema.- A fim de calcular a resposta do sistema, as vezes é necessário reduzir o diagrama
de blocos que representa o sistema em um único bloco, com uma descrição matemática que represente o sistema a partir de sua entrada para a sua saída.
Descriçãomatemática
Entradaangular
Saídaangular
Determine umsistemafísico e as
especificaçõesa partir dosrequisitos
Desenhe umdiagrama de
blocosfuncional
Transformeo sistemafísico em
um esquema
Use o esquemapara obter umdiagrama deblocos, umdiagrama defluxo de sinal,
ou uma represen-tação no espaço
de estados
Se houver blocosmúltiplos, reduzao diagrama deblocos em umúnico blocoou sistema amalha fechada
Analise,projete e
teste para verque requisitose especificaçõessão compatíveis
Passo 1 Passo 2 Passo 3 Passo 4 Passo 5 Passo 6
Procedimentos de Projeto - Passos
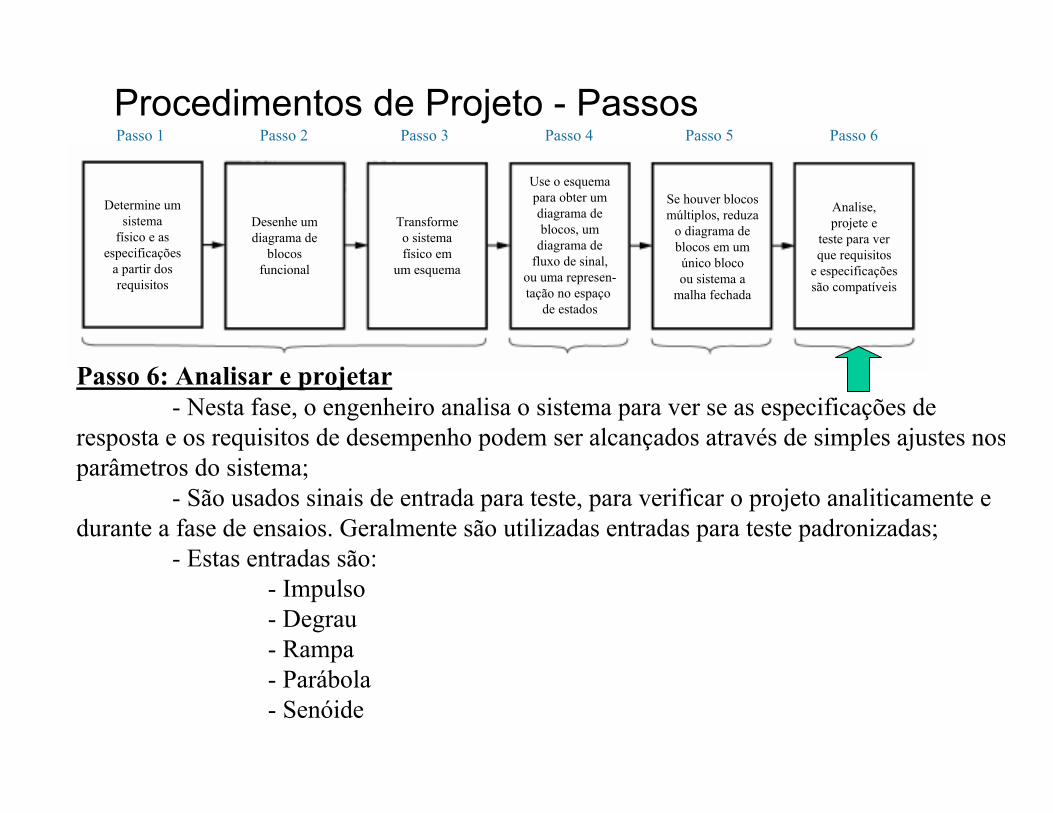
Passo 6: Analisar e projetar
- Nesta fase, o engenheiro analisa o sistema para ver se as especificações de resposta e os requisitos de desempenho podem ser alcançados através de simples ajustes nos parâmetros do sistema;
- São usados sinais de entrada para teste, para verificar o projeto analiticamente e durante a fase de ensaios. Geralmente são utilizadas entradas para teste padronizadas;
- Estas entradas são:- Impulso- Degrau- Rampa- Parábola- Senóide
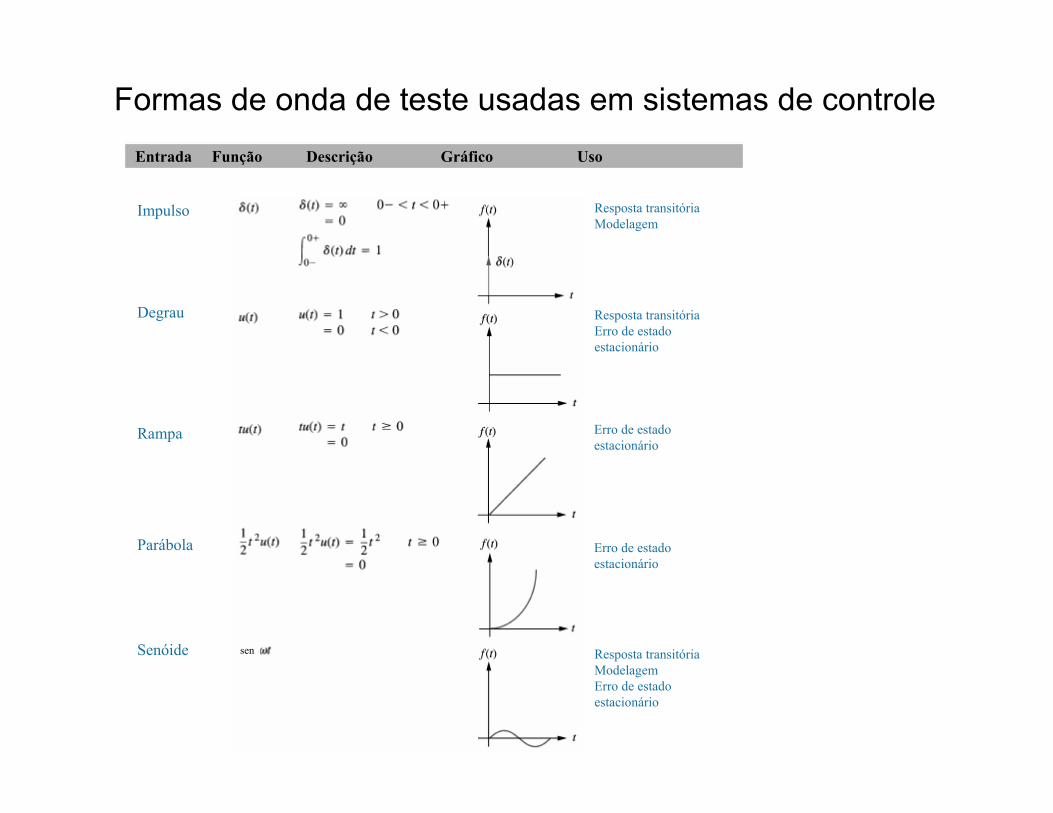
Formas de onda de teste usadas em sistemas de controle
Impulso
Degrau
Rampa
Parábola
Senóide
Resposta transitóriaModelagem
Resposta transitóriaErro de estadoestacionário
sen
Erro de estadoestacionário
Erro de estadoestacionário
Resposta transitóriaModelagemErro de estado estacionário
Entrada Função Descrição Gráfico Uso
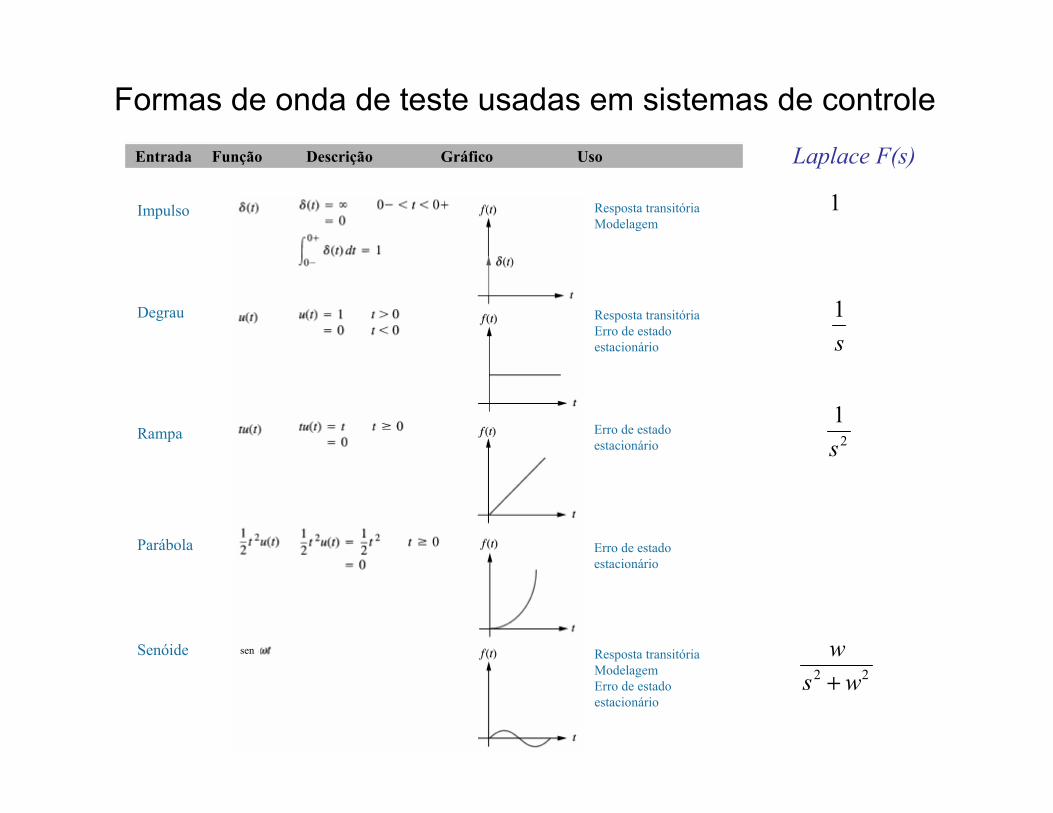
Formas de onda de teste usadas em sistemas de controle
Impulso
Degrau
Rampa
Parábola
Senóide
Resposta transitóriaModelagem
Resposta transitóriaErro de estadoestacionário
sen
Erro de estadoestacionário
Erro de estadoestacionário
Resposta transitóriaModelagemErro de estado estacionário
Entrada Função Descrição Gráfico Uso Laplace F(s)
1
s
1
2
1
s
22 ws
w
+