Embed Size (px)
Citation preview
原著論文
片麻痺歩行における麻痺側遊脚期の運動制御に関する研究 -スキーマ理論のGeneralized motor program概念を
用いた検討-
篠崎 真枝,大橋 ゆかり
茨城県立医療大学保健医療学部理学療法学科
要旨
本研究は,脳卒中患者にみられる“片麻痺歩行”を分析し,歩行速度条件に対する歩行パターンの変化から,麻
痺側遊脚期の運動制御の特徴を検証した。対象は,回復期病棟に入院中の脳卒中片麻痺を呈し歩行可能な17名と
した。歩行時下肢の運動をビデオ撮影し,麻痺側下肢①重複歩時間,②最大外転時の相対的タイミング,③最大
外転歩隔を抽出した。麻痺側運動機能評価(Burnnstrom stage)のすべてのステージで,「速く歩く」の条件で
は,重複歩時間の短縮が観察された。しかし,最大外転の相対的タイミングに有意な変化はみられなかった。こ
のことより,ひとつの一般化された運動プログラム(GMP)で速度条件に対応していると考えられた。さらに,
ステージⅡでは歩行パラメータの変動係数が高かった。分離運動が可能なステージⅤでは,速い歩行でパターン
のばらつきを収束させ,速度条件対し制御様式を変換していることが示唆された。
キーワード:片麻痺歩行,スキーマ理論,相対的タイミング,変動係数,運動制御
はじめに
脳卒中により片麻痺を呈した場合,運動や動作の再獲得は,障害に対応した新たな運動パターンの学習と考えることができる。例えば,脳卒中片麻痺患者にしばしばみられる運動パターンとして,「外転分回し歩行」が挙げられる。外転分回し歩行は,主に運動麻痺の代償として,麻痺側遊脚期に股関節を外転して振り出すという,運動障害に対応した運動パターンである。麻痺側運動機能の程度と歩行能力の関係については,これまでも報告されている1-3)。しかし,環境や歩行速度の変化といった難易度の変
化に対する歩行パターンの適応という視点で歩行能力を捉えた報告は少なく,それぞれの運動麻痺の段階に応じて,条件に適応するための歩行の制御様式にそれぞれの特徴があるのかどうかは明らかになっていない。さらに,脳卒中発症後は運動麻痺自体に変化があり,その変化に対する歩行パターンの習得過程も不明な点が多い。 運動学習における制御理論としてSchmidtらによって提唱されたスキーマ理論4)では,人間の運動は記憶としてあらかじめ貯えられている運動プログラムによって生成されると考えられている。貯蔵されているプログラムは個々の運動に ₁ 対 ₁ 対応した
連 絡 先:篠崎 真枝 茨城県立医療大学保健医療学部理学療法学科 〒 300-0394 茨城県稲敷郡阿見町阿見 4669-2 電 話:029-840-2219 FAX:029-840-2319 E-mail:[email protected]
茨城県立医療大学紀要 第 19 巻A S V P I Volume 19
片麻痺歩行の運動制御の検討 55
個別プログラムではなく,あるカテゴリーに属する運動に共通の一般化されたプログラム(generalized motor program,以下GMP)であると考えている5)。ある動作を遂行するとき,すでに学習されているGMPがその基本的なパターンとして利用され,遂行する課題や環境に適応できるパターンに変換されて実際の運動が実行される。スキーマ理論において,個々の運動パターンの基本となる時間的枠組みである相対的タイミングは不変的な要素とされ,ひとつのGMPから展開される運動は,同一の相対的タイミングで遂行される。従って,スキーマ理論では遂行速度などの条件が変化しても運動の枠組みを構成する相対的タイミングは変化しないと考えられている。 本研究では,このスキーマ理論におけるGMPの概念に基づき,脳卒中片麻痺患者の歩行を分析し,速度条件に対する歩行パターンの変化から,麻痺側遊脚期の運動制御の特徴を明らかにすることを目的とした。さらに,本研究では歩行パターンの縦断的な分析を加え,歩行の学習過程について検証する。
方 法
1.研究協力者 協力者は回復期リハビリテーション病棟に入院中の脳卒中による片麻痺を呈し,平行棒内を自力で歩行できる方とした。研究への協力の承諾が得られた17名(平均年齢50.7±15.1歳)を対象とした。研究協力者の属性は表 ₁ に記した。
2 .データの記録 ビデオ撮影によるデータの記録は, ₃ 週間に ₁ 度
の頻度で行った。理学療法による即時的な効果を排除することを考慮して,原則として月曜日の理学療法施行前とした。データの記録は,研究協力者が退院するまで実施した。麻痺側下肢の運動機能の指標としてBrunnstrom recovery stage6)(以下,B/S)を用い,記録日のB/Sを担当理学療法士より聴取した。また,研究協力者の診断名(病巣部位),発症日,入院日,主な理学療法プログラムに関する情報についても担当理学療法士より収集した。 歩行条件として 2 つの歩行速度を設定し,まず「普通の速さで歩く(以下,普通)」を実施していただき,その後先ほどの速度よりも「少し速く歩く(以下,速い)」と指示し,歩行を行った。下肢装具を使用して歩行練習している協力者は,装具装着にて歩行し,装具を使用していない場合は,通常理学療法の際に使用している運動靴を使用した。歩行時の安全に配慮し,協力者はすべて平行棒内にて平行棒を把持し,歩行を実施した。
3 .測定方法 平行棒内歩行中の下肢の動きを後方からビデオ撮影した。平行棒内の歩行路の床にはあらかじめビニールテープにて横 ₅ cm×縦15cm(横は ₃ マス)を描画し,歩隔計測の指標が常に撮影できるようにした。ビデオカメラのレンズのゆがみを考慮し足部は画像の中心に撮影されるよう配置した。 画像より①重複歩時間(麻痺側踵離地~次の麻痺側踵離地直前),②最大外転相対的タイミング(麻痺側遊脚期に足部が最大外転位となる時期を抽出し,麻痺側遊脚期を100%とした際の最大外転位となる時期を相対的タイミングとして算出した),②で抽出した画像より,③最大外転歩隔(非麻痺側踵
年齢 50.7 ± 15.1 歳
性別 男性 12名 女性 5名
発症からの初回測定までの期間(日) 77.0 ± 29.1 日
主な障害名 脳出血;10名,脳梗塞;7名
初回測定時 ブルンストローム・ステージ 下肢 Ⅱ;4名,Ⅲ;9名,Ⅳ;2名,Ⅴ;2名
表1 研究協力者の属性
茨城県立医療大学紀要 第 19 巻56
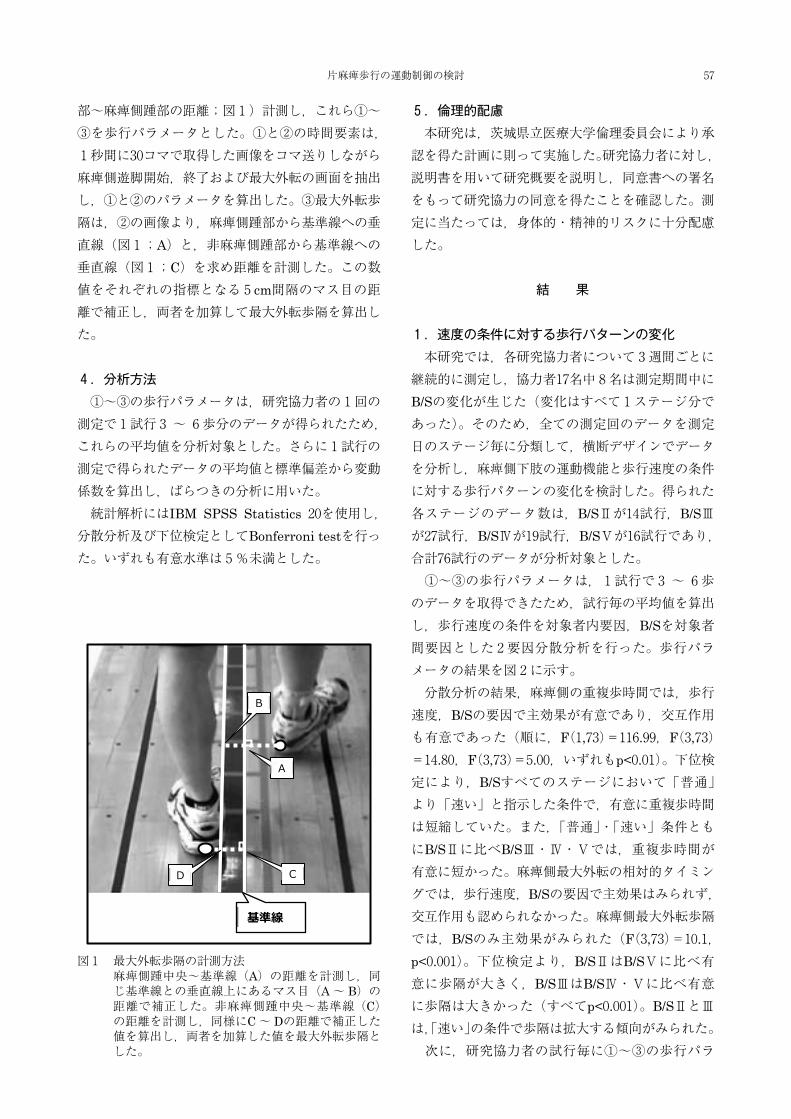
部~麻痺側踵部の距離;図 ₁ )計測し,これら①~③を歩行パラメータとした。①と②の時間要素は,₁ 秒間に30コマで取得した画像をコマ送りしながら麻痺側遊脚開始,終了および最大外転の画面を抽出し,①と②のパラメータを算出した。③最大外転歩隔は,②の画像より,麻痺側踵部から基準線への垂直線(図 ₁ ;A)と,非麻痺側踵部から基準線への垂直線(図 ₁ ;C)を求め距離を計測した。この数値をそれぞれの指標となる ₅ cm間隔のマス目の距離で補正し,両者を加算して最大外転歩隔を算出した。
4 .分析方法 ①~③の歩行パラメータは,研究協力者の ₁ 回の測定で ₁ 試行 ₃ ~ ₆ 歩分のデータが得られたため,これらの平均値を分析対象とした。さらに ₁ 試行の測定で得られたデータの平均値と標準偏差から変動係数を算出し,ばらつきの分析に用いた。 統計解析にはIBM SPSS Statistics 20を使用し,分散分析及び下位検定としてBonferroni testを行った。いずれも有意水準は ₅ %未満とした。
5 .倫理的配慮 本研究は,茨城県立医療大学倫理委員会により承認を得た計画に則って実施した。研究協力者に対し,説明書を用いて研究概要を説明し,同意書への署名をもって研究協力の同意を得たことを確認した。測定に当たっては,身体的・精神的リスクに十分配慮した。
結 果
1.速度の条件に対する歩行パターンの変化 本研究では,各研究協力者について ₃ 週間ごとに継続的に測定し,協力者17名中 ₈ 名は測定期間中にB/Sの変化が生じた(変化はすべて ₁ ステージ分であった)。そのため,全ての測定回のデータを測定日のステージ毎に分類して,横断デザインでデータを分析し,麻痺側下肢の運動機能と歩行速度の条件に対する歩行パターンの変化を検討した。得られた各ステージのデータ数は,B/SⅡが14試行,B/SⅢが27試行,B/SⅣが19試行,B/SⅤが16試行であり,合計76試行のデータが分析対象とした。 ①~③の歩行パラメータは, ₁ 試行で ₃ ~ ₆ 歩のデータを取得できたため,試行毎の平均値を算出し,歩行速度の条件を対象者内要因,B/Sを対象者間要因とした 2 要因分散分析を行った。歩行パラメータの結果を図 2 に示す。 分散分析の結果,麻痺側の重複歩時間では,歩行速度,B/Sの要因で主効果が有意であり,交互作用も有意であった(順に,F(1,73)=116.99,F(3,73)=14.80,F(3,73)=5.00,いずれもp<0.01)。下位検定により,B/Sすべてのステージにおいて「普通」より「速い」と指示した条件で,有意に重複歩時間は短縮していた。また,「普通」・「速い」条件ともにB/SⅡに比べB/SⅢ・Ⅳ・Ⅴでは,重複歩時間が有意に短かった。麻痺側最大外転の相対的タイミングでは,歩行速度,B/Sの要因で主効果はみられず,交互作用も認められなかった。麻痺側最大外転歩隔では,B/Sのみ主効果がみられた(F(3,73)=10.1,p<0.001)。下位検定より,B/SⅡはB/SⅤに比べ有意に歩隔が大きく,B/SⅢはB/SⅣ・Ⅴに比べ有意に歩隔は大きかった(すべてp<0.001)。B/SⅡとⅢは,「速い」の条件で歩隔は拡大する傾向がみられた。 次に,研究協力者の試行毎に①~③の歩行パラ
A
基準線
B
D C
図 ₁ 最大外転歩隔の計測方法 麻痺側踵中央~基準線(A)の距離を計測し,同
じ基準線との垂直線上にあるマス目(A ~ B)の距離で補正した。非麻痺側踵中央~基準線(C)の距離を計測し,同様にC ~ Dの距離で補正した値を算出し,両者を加算した値を最大外転歩隔とした。
片麻痺歩行の運動制御の検討 57
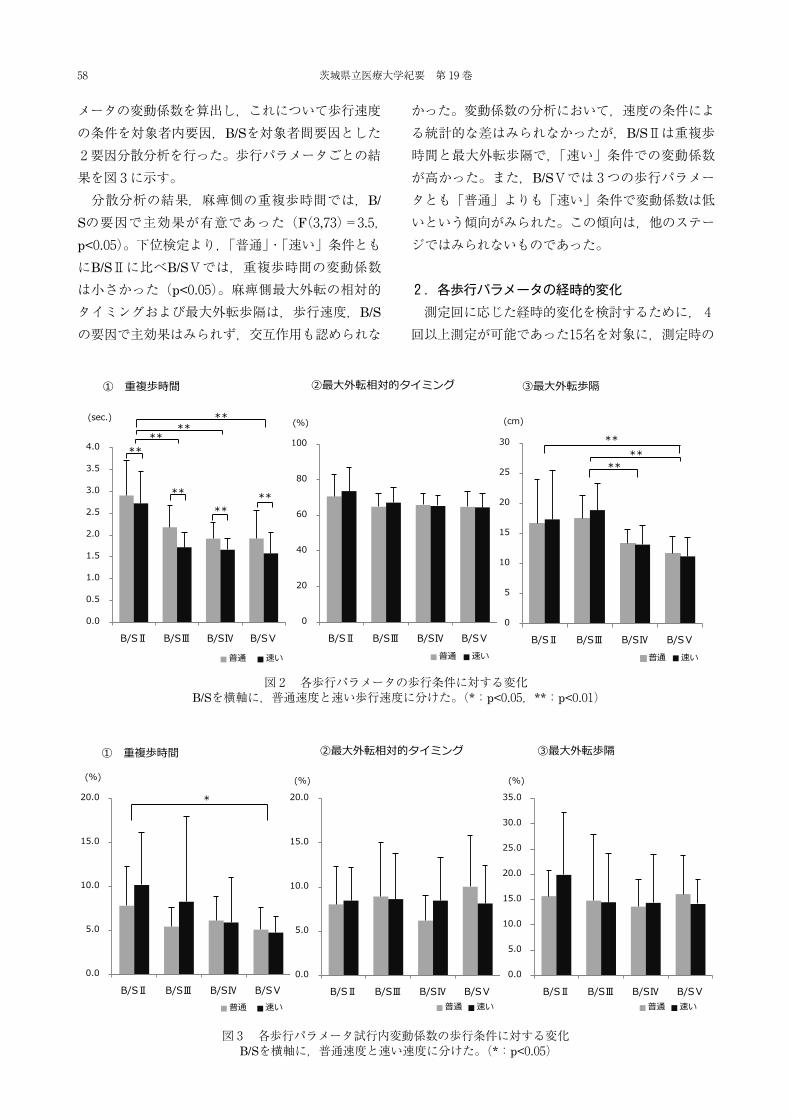
メータの変動係数を算出し,これについて歩行速度の条件を対象者内要因,B/Sを対象者間要因とした2 要因分散分析を行った。歩行パラメータごとの結果を図 ₃ に示す。 分散分析の結果,麻痺側の重複歩時間では,B/Sの要因で主効果が有意であった(F(3,73)=3.5,p<0.05)。下位検定より,「普通」・「速い」条件ともにB/SⅡに比べB/SⅤでは,重複歩時間の変動係数は小さかった(p<0.05)。麻痺側最大外転の相対的タイミングおよび最大外転歩隔は,歩行速度,B/Sの要因で主効果はみられず,交互作用も認められな
かった。変動係数の分析において,速度の条件による統計的な差はみられなかったが,B/SⅡは重複歩時間と最大外転歩隔で,「速い」条件での変動係数が高かった。また,B/SⅤでは ₃ つの歩行パラメータとも「普通」よりも「速い」条件で変動係数は低いという傾向がみられた。この傾向は,他のステージではみられないものであった。
2 .各歩行パラメータの経時的変化 測定回に応じた経時的変化を検討するために, ₄回以上測定が可能であった15名を対象に,測定時の
図 2 各歩行パラメータの歩行条件に対する変化B/Sを横軸に,普通速度と速い歩行速度に分けた。(*:p<0.05,**:p<0.01)
0
20
40
60
80
100
B/SⅡ B/SⅢ B/SⅣ B/SⅤ
(%)
普通 速い
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
B/SⅡ B/SⅢ B/SⅣ B/SⅤ
(sec.)
普通 速い
0
5
10
15
20
25
30
B/SⅡ B/SⅢ B/SⅣ B/SⅤ
(cm)
普通 速い
① 重複歩時間 ②最大外転相対的タイミング ③最大外転歩隔
**
** **
**
** **
** ** **
**
図 ₃ 各歩行パラメータ試行内変動係数の歩行条件に対する変化B/Sを横軸に,普通速度と速い速度に分けた。(*:p<0.05)
0.0
5.0
10.0
15.0
20.0
B/SⅡ B/SⅢ B/SⅣ B/SⅤ
(%)
普通 速い
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
B/SⅡ B/SⅢ B/SⅣ B/SⅤ
(%)
普通 速い
0.0
5.0
10.0
15.0
20.0
B/SⅡ B/SⅢ B/SⅣ B/SⅤ
(%)
普通 速い
① 重複歩時間 ②最大外転相対的タイミング ③最大外転歩隔
*
茨城県立医療大学紀要 第 19 巻58

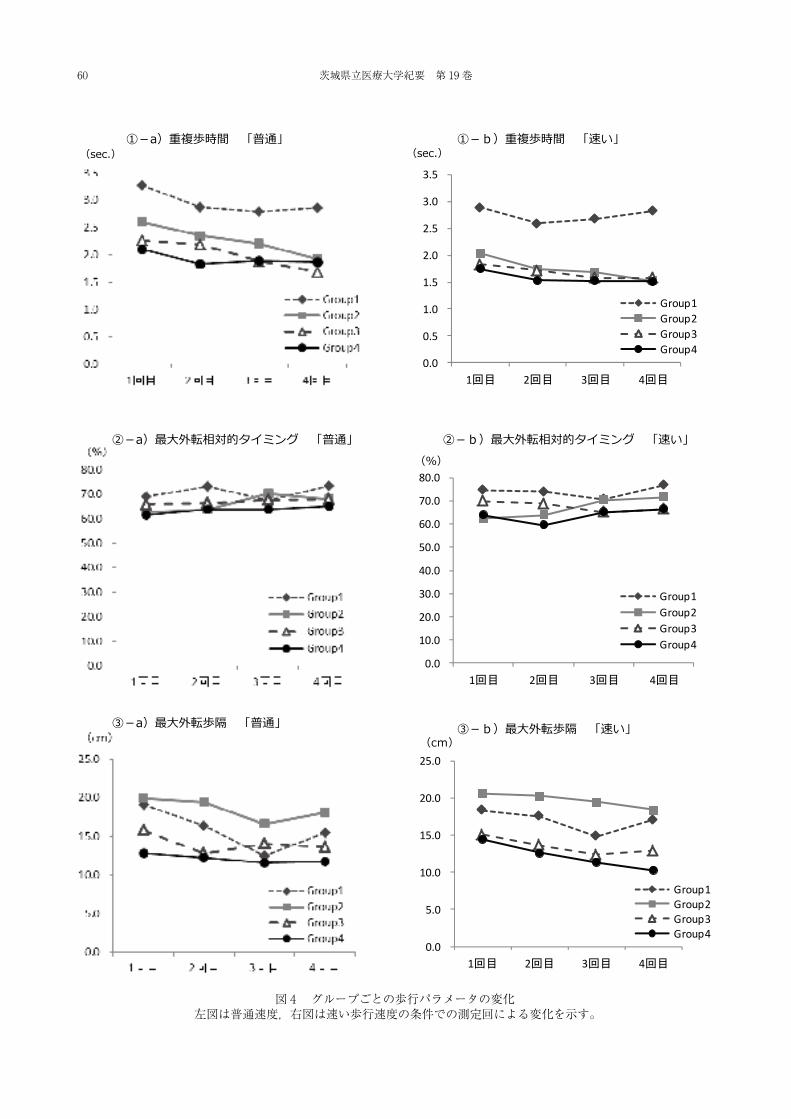
B/Sに基づき以下のような ₄ つのグループに分類した。グループ ₁ ; ₃ 名( ₄ 回の測定においてB/SⅡにとどまった協力者),グループ 2 ; ₄ 名( ₃ 名はすべての測定でB/SⅢ,₁ 名はB/SⅡ→Ⅲ→Ⅲ→Ⅲ),グループ ₃ ; ₄ 名(B/SⅢ→Ⅳ→Ⅳ→Ⅳであった協力者),グループ ₄ ; ₄ 名( 2 名はすべての測定でB/SⅤ, 2 名はB/SⅣ→Ⅴ→Ⅴ→Ⅴ)。 ①~③の歩行パラメータについて,速度の条件に分け,各グループの平均値を算出し, ₄ 回の測定の変化を図 ₄ に示す。重複歩時間は,「普通」「速い」ともに,測定回を重ねるごとに徐々に時間が短縮する傾向にあったが,グループ ₁ では 2 回目以降大きな変化はみられなかった。最大外転相対的タイミングは,測定回による変化はほとんどみられず,麻痺側遊脚期の中のタイミングとしては一定であった。最大外転歩隔は測定回を経るごとに歩隔は減少していた。特に,横断的分析でも歩隔が大きかったB/SⅡ・Ⅲを含むグループ ₁ と 2 では,歩隔の減少が顕著であった。 次に,歩行パラメータの ₁ 試行内変動係数について,速度の条件に分け各グループの平均値を算出し,₄ 回の変化を図 ₅ に示す。 「速い」の重複歩時間,最大外転相対的タイミング,最大外転歩隔では,変化の大きさや測定回のピークは異なるが,経時的変化として変動係数が低下していく傾向がみられた。グループ ₁ や 2 は,特に ₁ 回目の測定時の変動係数は高く, 2 回目の測定で大きく低下していた。全体的に「普通」よりも「速い」の方が変動係数は高いという傾向にあったが,グループ ₄ の ₃ 回目, ₄ 回目の測定では,「速い」よりも「普通」で変動係数は高く,「普通」の方がばらつきは大きい傾向にあった。
考 察
1.速度条件に対応するための歩行パターン変化 「普通に歩く」から「少し速く歩く」への歩行速度を変化させるような指示を行った場合,麻痺側運動機能のステージに関わらず,重複歩時間の短縮がみられた。本研究で測定したパラメータは重複歩時間であり,重複歩時間には麻痺側遊脚期と立脚期の両方の時間が含まれている。「速く」の条件の際,遊脚期・立脚期の一方のみを短縮させたとは考えに
くく,麻痺側遊脚期も速く遂行していたと推測できる。 B/Sごとに速度条件に対する歩行パターン変化の特徴をみると,B/SⅡでは「速く」の条件で最大外転歩隔は拡大し,試行内の変動係数は大きくなった。B/SⅤでは「速く」の条件の方が最大外転歩隔は減少し,試行内の変動係数は低下する傾向がみられた。このような速度に対する変化の違いから,『B/SⅡ』と,『B/SⅤ』では歩行速度条件に対応するための制御様式が異なっていると考えられる。片麻痺歩行の歩行周期を検討した研究7)においても,歩行周期はB/Sのステージにより影響を受けたことが報告されており,麻痺側の運動機能に改善に応じた運動制御様式の特徴があることが示唆された。
2 .スキーマ理論による麻痺側遊脚期制御の解釈 最大外転相対的タイミングは,速度の条件の影響をほとんど受けておらず,「普通」も「速い」も相対的タイミングは変化がみられなかった。また,測定回ごとの経時的な分析でも,著明な変化はみられなかった。スキーマ理論において,健常者では歩行速度が変わっても各時期の時間的比率である相対的タイミングは同一である8)。本研究の結果は麻痺側遊脚期のみという限定的な分析ではあるが,脳卒中片麻痺においてもB/Sのステージに関わらず,自らコントロールできる範囲の重複歩時間の短縮であれば,同一のGMPにより展開されていると考えられる。本研究では,任意の速度となっていため,歩行のリズムや速度を規定した場合は,異なる結果も予想される。
3 .�試行内変動係数によるB/Sに応じた運動制御の特徴
本研究では,運動の変動性,ばらつきを検討するために,歩行パラメータの試行内の変動係数について分析した。標準偏差や変動係数を用い運動のばらつきを検証した研究は,バイオメカニクス分野で広く行われており,試行中の変動する要素が環境や条件に適応したパフォーマンスの柔軟性を支える役割を担っていると示されている9)10)。運動におけるばらつきの大きさは, 2 つの意味で解釈できる。 ₁ つはコントロールできずにランダムな変動が生じている,すなわち,ばらついてしまっている状態であ
片麻痺歩行の運動制御の検討 59
(sec.) ①-a)重複歩時間 「普通」
(sec.)①-b)重複歩時間 「速い」
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
1回目 2回目 3回目 4回目
Group1Group2Group3Group4
②-a)最⼤外転相対的タイミング 「普通」 ②-b)最⼤外転相対的タイミング 「速い」
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
1回目 2回目 3回目 4回目
(%)
Group1Group2Group3Group4
③-a)最⼤外転歩隔 「普通」
0.0
5.0
10.0
15.0
20.0
25.0
1回目 2回目 3回目 4回目
(cm)
Group1Group2Group3Group4
③-b)最⼤外転歩隔 「速い」
図 ₄ グループごとの歩行パラメータの変化左図は普通速度,右図は速い歩行速度の条件での測定回による変化を示す。
茨城県立医療大学紀要 第 19 巻60
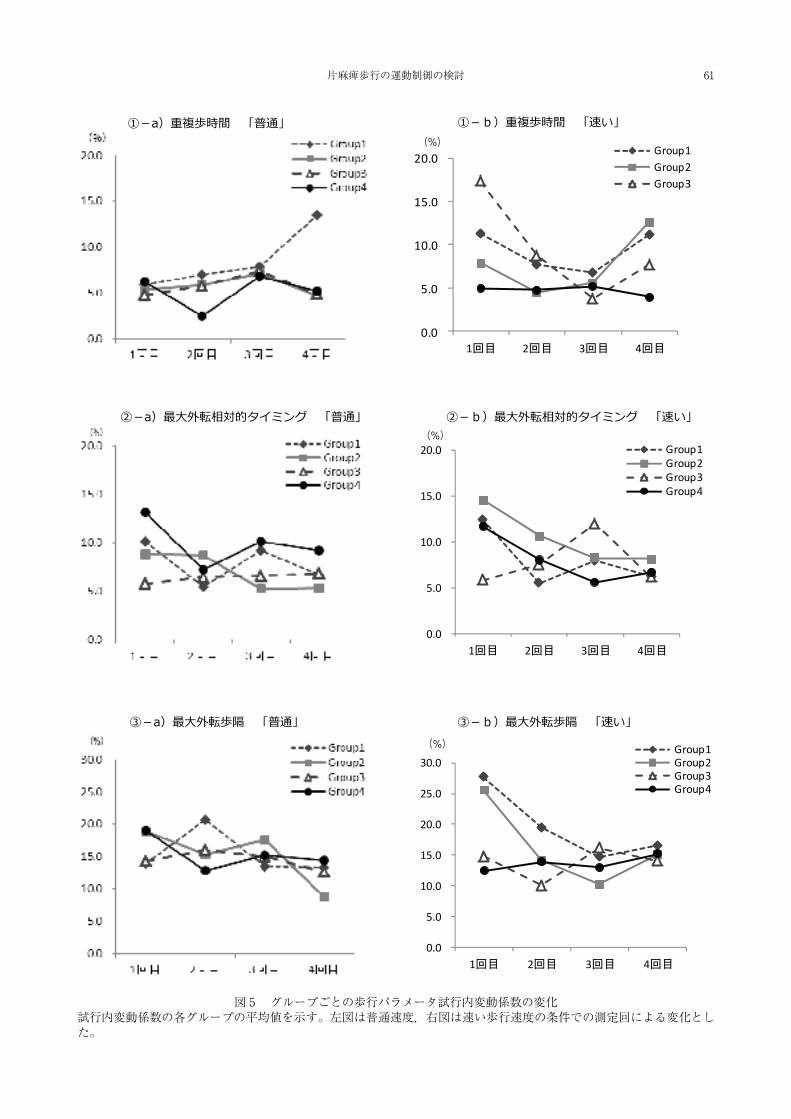
図 ₅ グループごとの歩行パラメータ試行内変動係数の変化試行内変動係数の各グループの平均値を示す。左図は普通速度,右図は速い歩行速度の条件での測定回による変化とした。
0.0
5.0
10.0
15.0
20.0
1回目 2回目 3回目 4回目
Group1Group2Group3
①-a)重複歩時間 「普通」
0.0
5.0
10.0
15.0
20.0
1回目 2回目 3回目 4回目
Group1Group2Group3Group4
0.0
5.0
10.0
15.0
20.0
25.0
30.0
1回目 2回目 3回目 4回目
Group1Group2Group3Group4
①-b)重複歩時間 「速い」
②-a)最⼤外転相対的タイミング 「普通」 ②-b)最⼤外転相対的タイミング 「速い」
③-a)最⼤外転歩隔 「普通」 ③-b)最⼤外転歩隔 「速い」
(%)
(%)
(%)
片麻痺歩行の運動制御の検討 61
る。もう ₁ つは安定したパフォーマンスを遂行するために柔軟に適応的に組織化するためのばらつきである。これは,常に変わる環境や課題の要請に適応するための調節的な役割を担うばらつきである。 結果1, 2 の変動係数の分析より,B/SⅡでは麻痺側重複歩時間と最大外転歩隔の変動係数は高かった。また,測定回ごとの結果において,グループ ₁や 2 は, ₁ 回目の測定時の変動係数高く,いずれも
「速い」の条件でその傾向はみられた。B/SⅡでは時間も歩隔も制御しきれず,ばらついてしまっている状態と考えられる。B/SⅡやⅢの歩行練習初期では,歩行速度を意図的に変化させるという経験が乏しいことも,ばらつきの大きさに影響していると考えられる。 一方,B/SⅤは他のステージとは異なり,「普通」よりも「速い」の条件で変動係数が低下していた。測定回ごとの分析においても,グループ ₄ は ₃ 回目,₄ 回目の測定回でこの傾向がみられた。B/SⅤの「普通」でみられるばらつきについて,他のステージやグループに比べ重複歩時間の変動係数は低いが,最大外転相対的タイミングや歩隔の変動係数では明らかな差が見られず,一定した重複歩時間を支えるために他のパラメータが変動し,適応的なばらつきとなっていると考えられる。しかし,「速い」の条件では,重複歩短縮させるという難易度の高い要求に対応するために,変動性をおさえて一定のパターンで歩行の安定性を補償していると考える。つまり,より分離運動が可能なステージであるB/SⅤでは,付与された条件に対して多様な運動制御の様式を用いることが可能なのではないだろうか。さらに,このような運動制御様式の変換が測定回後半でみられることから,練習により習得された可能性が示唆された。
4 .歩行パターンの学習過程 本研究の測定回ごとの経時的変化の分析より,B/Sが変化しない場合でも最大外転歩隔の減少や ₁ 試行内の変動係数の低下といった変化がみられた。したがって,運動麻痺の回復がプラトーになった後も歩容の改善がみられており,これらは理学療法を含めた練習の効果と考えられる。運動学習の過程で学習が進むにつれて,運動パターンはより効率の良いパターンに収束していく。本研究においても変動係
数の経時的変化より,ばらつきが減少して歩行パターンが収束する傾向を確認することができた。本研究のように,運動パターンを「ばらつき」という観点から捉えることで,運動学習がどの程度進んでいるか,運動学習のどの段階にあるのか,といった理学療法における運動の学習過程を確認できる可能性が示唆された。今回の測定で用いている方法は簡便であり,理学療法の臨床現場においても十分に実施可能である。運動学習の過程を分析することで,より効果的な練習方法を提供するひとつの材料になると考える。
5 .本研究の限界と今後の課題 本研究は歩行周期の中の麻痺側遊脚期に着目したものであり,歩行の要素の一部を分析したにすぎない。したがって,歩行能力全般について解明することは困難である。また,今回の測定では,歩行速度の指標として重複歩時間を計測した。その際の距離の計測は行っていないため,「普通に歩く」と「少し速く歩く」の条件での歩行速度の変化は明らかでなはない。 今回,外転回し歩行で特徴的な麻痺側遊脚に焦点を当てた。しかし,麻痺側の立脚期における支持性も歩行能力に関わる重要な要素である。今後,立脚期も含めた歩行周期全般にわたる時間的比率について検討する必要がある。また,脳卒中片麻痺患者の運動麻痺に応じた運動制御の特徴から,それぞれに効果的な理学療法介入について検討する必要がある。
謝 辞
今回測定に協力いただいた皆様,施設関係者の方々に深く感謝申し上げます。
文 献
₁ ) Brandstater ME, de Bruin H, Gowland C, Clark BM. Hemiplegic gait:analysis of temporal variables. Arch Phys Med Rehabil, 1983;64:583-587
2 ) Chitralakshmi KB, Mark GB, Richard RN, Steven AK. Relationship Between Step
茨城県立医療大学紀要 第 19 巻62
Length Asymmetry and Walking Performance in Subjects With Chronic Hemiparesis. Arch Phys Med Rehabil, 2007;88:43-49
₃ ) Chihiro Mizuike, Shohei Ohgi, Satoru Morita, Analysis of stroke patient walking dynamics using a tri-axial accelerometer. Gait & Posture, 2009;30:60-64
₄ ) Schmidt RA. A schema theory of discrete motor skill learning. Psychological review, 1975;82:225-260
₅ ) Schmidt RA. 運動学習とパフォーマンス.調枝孝治.大修館書店.1994;89-109
₆ ) Brunnstrom S. Motor testing procedures in hemiplegia:based on sequential recovery stages. Phys Ther, 1966;46:357-375
₇ ) 大橋ゆかり,篠崎真枝,坂本由美.片麻痺歩行のブルンストロームステージによる歩行周期の変化.理学療法科学.2008;23(6):805-809
₈ ) Shapiro DC, Zernicke RF, Gregor RJ, Diestel DD. Evidence for generalized motor programs using gait pattern analysis. J. Mot. Behav, 1981;13(1):33-47
₉ ) Bootsma RJ, Van Wieringen PCW. Timing an Attacking Forehand Drive in Table Tennis. J. Exp. Psychol. Hum. Percept. Perform, 1990;16(1):21-29
10) Lee DN, Lishman JR, Thomson JA. Regulation of Gait in Long Jumping. J. Exp. Psychol. Hum. Percept. Perform, 1982;8(3):448-459
片麻痺歩行の運動制御の検討 63

An analysis of motor control on the paralyzed side during the swing phase in patients with stroke-induced hemiplegia
-Applying the concept of generalized motor program in schema theory-
Masae Shinozaki, Yukari Ohashi
Dapartment of Physical Therapy, Ibaraki Prefectural University of Health Sciences
Abstract
The present study, an analysis of “hemiplegic gait” of patients with stroke-induced hemiplegia, examined
the characteristics of motor control on the paralyzed side during the swing phase, based on changes in walking
patterns at different walking speeds. The subjects were seventeen patients with stroke-induced hemiplegia who
were hospitalized in the convalescent care ward and had the ability to walk.
Movement of the legs during walking was recorded on videotape, and the following were measured on the
paralyzed side during the swing phase: (1) stride time, (2) relative timing, and (3) maximum abduction stride
width. At all Brunnstrom stages (designed to assess the level of recovery from motor function), a decrease was
noted in the stride time on the paralyzed side during the swing phase when the patients walked slightly faster
than usual. However, there were no significant changes in the relative timing of abduction, presumably because
the timing was controlled by a single generalized motor program (GMP).
Coefficient of variation was high in the walking parameters of Brunnstrom stage II patients. On the other
hand, stage V patients, who could move their limbs without constraint to synergic movement, could decrease the
variability of the walking parameters when they walked fast, suggesting that they could adjust their motor control
methods according to walking speed.
Key words : hemiplegic gait,schema theory,relative timing,coefficient of variation,motor control
茨城県立医療大学紀要 第 19 巻64





























