Embed Size (px)
Citation preview

水深測量について
安武測量設計株式会社

水深測量概説
水深測量も陸上の測量と同様に,その平面的な位置と深さ(高さ)を求めることを要す
る。 この海上位置を決定することを測位といい、深さを求めことを測深と言っている。
水深測量の特色は、絶えず移動昇降す水面で測量を行うので、同じ位置で測定を繰返す
ことが出来ない。 従って精度は多少粗くとも、位置と深さを同時に確実に測定すること
が必要とされる。 水深測量の目的は、港湾,航路,河川及び内陸水面の安全航行,維持
管理,あるいは埋立てまたは、構造物の設置等の基礎資料の作成,あるいは学術調査等で
ある。
海の測量の歴史は、陸上測量が陸軍参謀本部陸地測量部に始まった様に、海軍軍令部水
路部より始まった。 太平洋戦争の後には陸上測量が地理院へ、海上測量は海上保安庁へ
と夫々引継がれた。 明治の海軍はその規範を英国海軍に、陸軍はドイツへ求めた、この
様な事情から、測量用語等にも陸地の測量と違う言葉が、現在でも使用されている。
海上保安庁では、陸上測量と海の測量とを区別して、水路測量と称している。また海図
に対し陸上の地図を、陸図と言っている。
海図の補正あるいは海の基本図等、海上保安庁が審査又は発注する測量では、水路測量
関係規則(水路業務法,水路業務法施行規則,水路測量業務準則,水路測量業務準則)に
従った測量及び図式を実施使用しなければならないが、それ以外の測量・測深(一般測深)
では必ずしも同様とする必要はない。
以下の解説では独自の用語の説明も加えながら、水路部(現海洋情報部)の測法をもと
に記述することとする。
1)基準点測量(ControlPointServey)位置決定の為には陸地測量の場合と同様に、基準点測量を実施しておかなければな
らない。 水路測量においては、原点測量と言っている。
基準点のうち、測量の骨格となるような測点を主要原点と言い、海岸線の測量や測
深のための点 (誘導点,カット点,岸測点等)を補助原点と言っている。
主要原点測量は三角測量及び多角測量(結合,閉合)で実施し、通常は測標や旗標
を設置する。
補助原点は、主要原点より多角測量,前方交会法等により決定するが、必ずしも㎝、
㎜まで求める必要はなく、測量図の展開および潮位に支障をきたさない程度の精度で
よいことが多く、六分儀およびエスロンテープ等で十分のことが多い。 但し測点精
度の点検の為には、閉塞させておく必要がある。
即ち、突出し点では他原点から測角または測距、前方交会法では三点以上の交会を
実施する。
補助原点は海岸線に設置されされることが多く、護岸あるいは防波堤のコーナーま
たは中間部前面および岩頂等に、石灰を水で溶いて海上から見易く判別出来るような
形に塗ったものを使用することがあり、この標識を白塗標またはライムとよんでいる。
測標や旗標あるいは白塗標等の標識をつくることを設標と言う。

設標し原点測量が終了したら後続の作業のために、それ等の点を展開して作図して
おく。 この種の図の内、アルミケント紙(0.3mm 以上)に正確に展開したものを原
点図あるいは原点図板(単に図板という時は後述の測深図板,岸灘図板をも含む)と
言い、略図または海図の複写図等に略記したものを設標図といっている。
設標図には、水路部座標点に H,地理院点に A,旗標に F,白塗標はその形状を付
し、点名を記入しておく。
一般測深の原点図は、ポリエステル・ベース等を使用しても良いので図板と云う言
葉は相応しくないと思う。
2)岸線測量
水深図を作成するにあたっては、測地付近の地形図が利用できれば、それを活用し
描画することもあるが、海岸線の記入ため測量を行う。 これを岸線測量(岸測)と
言っている。
岸線測量では、図の縮尺,測量目的等で違いはあるが、海岸形状,顕著な港湾施設
等の測量を行い、陸地の地形測量の様に細かいものまで表現する必要がないことがお
おくあり、平板測量によることは少なく、一般的には記帳式測量をおこなう。 記帳
式測量は、原点及び補助原点より突出し多角,前方交会法あるいはオフセット測量等
で行うので、トランシットや六分儀およびエスロンテープ等の少数の機具ですみ、縮
尺の変更にも対応でき,地形等の制約を受けにくいので便利な測法である。
岸線測量の観測では野帳等に略図,点名および観測値を記入する。 この野帳等を
岸測簿と云う。 観測の後、それらを描画し地形を表現するのであるが、0.3 ㎜のア
ルミト紙に描画したものを岸測図板と言う。
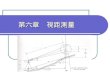
測深図板(平行誘導)

測深図板(放射誘導)
3)測位(Positioning)(図解法,計算法により位置を出す。)
面上で位置を決定するとき、二つの要素が必要になる。 即ち平面座標(x,y),極座標(Θ,r)あるいは経緯度(λ,φ)等である。
上記の平面座標は二つの距離,極座標は一つの角度と一つの距離,そして経緯度は
二つの角度で表されている。
測位に於いても二つの要素の組合わせにより位置決定することになるが、角度ある
いは距離が測定されたとき、方向線あるいは円弧が描ける、この線のことを“位置の
線”と言っている。
二本の位置の線は互いに直角に交わるほど測位誤差は小さくなる。 実際に観測す
る物体は海上の船であり、マスト,アンテナあるいは測量旗等である。
この様に観測された点をつないだ線は、測量船の航跡であり、その線を測深線、そ
れを作図したものを航跡図、0.3 ㎜のアルミケント紙に描画したものを測深図または
測深図板と言っている
航跡図には測深記録を整理する時には,測位した点に小円を描きその横に番号(測
深番号と言う)を連番で記入する。
水路測量計画書には、三点両角法,直線一角法,一直線一距離法,二距離法等の分
類が使われている。
使用測量機器は六分儀,トランシット等の光学機器,電磁波測位機,人工衛星ある
いはそれらの併用によるものがある。

以下では測定要素による分類に従って説明をしたいと思う。
a)二つの角度による測位
(1)三点両角法(後方交会法)
円周角は一定であることを利用する。
測量船は測深区域を地形図等から判断
し操船する、測位観測者は船上に於いて,
六分儀を用いて,三つの測標間を挟む二
角を同時に測角し、船上にて測深図に三
稈分度器で位置を決定する。
この方法は、観測者が測量船に全員乗
船しているので、無線機が普及していな
い時代には一般的であったが、測量区域をまんべんなく測深するのに、かなりの熟練
をようする。
(2)一直線一角法 1(前方交会法)
陸上潮点 2 点より、同時に船の位置を測角し測
位する。 三点両角法と同様に非誘導で測深す
ることもあるが、船の走る方向をあらかじめ一
方の点の方向線上を走らせる時、その測点を誘
導点と言い、他の点をカット点と言う。
この誘導方向線を平行にして誘導することを平
行誘導と言い、誘導点をあらかじめ平行になる
様設置しなければならない。 海岸に於いて地
形上の障害などにより平行誘導が行なえないと
き、誘導点より放射誘導を行うこともある。
平行誘導の方が一般的に効率がよい。 又、誘導
方向、カット方向等、目通しに標を設置して測
位することも出来る。
(3)一直線一角法 2 (側方交会法)
陸上測点より誘導線上に船を誘導し、測量船
上で測角し測位する方法である。
b)二つの角度による測位
(1)一直線一距離法 1河川の水深測量に於いては,灘線方向を両岸
に取り,ワイヤーロープ又は間縄等を張り、そ
れに沿って測量船を操船し距離を測定して位置
を決定する。
海上では両岸に測点を取ることはあまりなく、
1 点より誘導し、間縄等で距離をだし測位する方
法である。

(2)一直線一距離法 2
(1)と同樣であるが、測距を光波測距儀あるいは後述の電波測位儀により測定測位
c)二つの距離による測位
電波測位儀(デッカ,ローーラン,トランスポンダ-,エレクトロボジック,オー
デスタ等)および衛星測位システムにより測位する。レーダーも一種の潮位儀である
と言える。
(1)2距離法 {トランスポンダ-,エレクトロポジック、オーデスタ)
船に電波の発信源(主局という)をのせ、陸上基準点に反射局(従局といい、バラ
ポナアンテナ)を 2 局設置し、2距離を測定し測位する。

一般的な電磁波距離儀(ジオジメーター、テルロメーター等)と原理的には同じで
あるが、異なる点は、常に移動する海上で測定しなければならない為、精度は多少落
ちたとしても素早く測定し、発信、,受信の時間に移動した分を補正出来る機能を有
していることである。
最近では光波灘距儀(移相検波方式ではなくパルス方式であるので近距離ではコー
ナーキュウブを必要としない)にもこの様な機能を有するものも出現しているが、霧
や霞に影響されやす
(2)距離差方 (デッカ,ロラン A,ロラン C)陸上に同じ時計を有する三つの主局があり、船上に従局がある。あるふたつの主局
から同時に発信された電波を船で受信した時二つの電波の受信時刻に差が生じる、こ
の時間差は距離の差と同じである。二つの主局からの距離の差は一つの双曲線上にあ
ることになる。従って、二組みの双曲線の交点が船の位置を示す。
(3)衛星測位 (NNSS,GPS 等)
人工衛星から発信される電波を受信して灘位する。 NNSS では衛星からの電波を
受け、ドップラー効果を測定し、衛星の軌道情報から自船の位置を求めるシステムで
ある。 測位精度は、数 10m ~ 100m とかなり大きく、2時間に 1 回程度の測位が可
能となるが、その間ロラーン等別の測位システムを使用する必要がある。
GPS は、単独潮位(受信機 1 台)の精度は15 m 程度でリアル・タイムに測位が
可能となる。GPS の原理は 4 個以上の衛星からの電波を同時に受け、電波の到達時
間差から距離を計算し、デカルト座標(三次元立体座標)を決定し、経緯度等へ変換
測位するシステムである。
最近のGPS測位システムでは相対測位法によるものが主流であり、海上保安庁の
運用するビーコン局によるDGPS(ディファレンシャル GPS)では測位精度は、移動体で 1.5m程度。数分の観測では 0.5 m、また天頂衛星等も併用するとさらに 1/3 になるよう
である。またネットワーク型のGPSを使用するとさらに精度を増すことができる。
DGPSでは一台の受信機で測位でき、位置情報等の補正もブロードキャストされ
ているので即時に測位できる。
ネットワーク型のGPS使用の場合、位置情報補正並びに測位のための通信方式に
電話代等がかなりの額になることがある。
GPS方式はその原理は距離差方式であり、上空視界の確保が必要である。
4)測深(Sounding)(1)直接水準
陸上横断測量とお同じであり、水路測量に於いては、海岸線の浅い部分を測量する
時に行い、汀線測量とも言う。
(2)測桿による測深
測桿(スタッフ)を船上よりおろし水面からの深さを測定する。 この方法は水深
が比較的に浅くて、直接水準が障害等で出来ない時に行う。
(3)測鉛(レット Sounding lead)による測深

音響測深機の開発される以前は、鉛の重りに綱をつけて測深する方法がほとんどで
あった。 この鉛の重りを測鉛又はしツトといい、綱を測深索またはレットラインと
いう。 現在では海底異常物の探索、あるいは護岸際等の音響測深が不可能の時にお
こなう。
(4)音響測深(EchoSounding)音響測深機が開発され、点の測深から線の測深へ、そして現在では多素子の送受波
器(音響掃海機あるいはマルチチャンネル・ナロウピーム・エゴウサウンダー)によ
る、面の測深へと発展してきている。
音響側深機は一種の時計装置である。水中を伝搬する音速を V とすれば深さ D は
D = 1 / 2Vt である。ここに t は音を発振し
て受信するまでの時間である。t を測定すれ
ば D が分ることになる。 音響測深機は直
接時間を測定するのではなく、正確に一定速
度で回るモーター(同期モーター)を使って
測定する。音響測深機は三つの部分からなり、
一つは同期モーター、一つは送受波器(スピ
ーカーとマイクと考えてよい)、そして一つ
は記録機である。
今ここに 1 秒で 7.5 回転するモーターがあ
るとすると、このモーターが 1 回転するには
1 / 7.5 秒かかる。 又このモーター軸に円
盤を付けたとしると、円盤の a の位置で音を
発信して又,a の地点で受信したとすると、
音が受信したとすると、音が水中を伝搬した時間は 1 / 7.5 秒となる。水中の音測を
1500m/sec とすると、水深は D=1/2 × 1500 × 1/7.5 = 100m となる。 又この円
盤の半径を 19cm とすると円周は lm となる。この a の位置にペンをつけ同期記録紙
を巻いておく。音を発信した時スパークして紙に印をつけ、又受信した時、印をつけ
たとする。この紙の印間の距離が 10cm であれば l0m になる。音響測深機の原理は概
略上記の通りである。実際の音測機に於ける縮尺は 1/100 となっているとは限らない
ので特別なスケールが必要となる。
海水中を伝搬する音の速度は塩分濃度、水温、水圧によって異なる。例えば、水温
が 1 度上昇すると 0.2 %,塩分が 1%増加すると 0.07 %,深さが 100m 増すと 0.11 %
伝播速度が速くなる。したがって上記要素を測定して音速補正を行っている。
50m 以浅に於いてはバーチェック法により補正を行う。バーチェック法は送受波器
直下に反射板(バー)を 2m 毎に下降上昇させその記録を取り、仮定音速と実音速の
比を決定する方法です。
通常海域に於ける音速比率は、± 5 %程度の範囲の差があり、0.5%づつのスケー
ルが用意されている。
最近の音響測深器はデジタルデータ(音往復時間を直接記録)で水深が㎝でコンピ
ューウタに記録させているが、ノイズの除去が完璧にはできないため、異常物かノイ

ズかが判然としない。これらを考慮するとアナログの記録紙データは必要である。
多素子音響測深器は海図の水深補正では、掃海幅はナロービームと比べると狭いが
確実性があり、現在も使用されている。
マルチチャンネル・ナロウビーム機であるが、大型(深海用等)のものは、送波機
を船底横方向に並べ、受波機を船底縦方向に並べて設置してある。送波機で発振する
音波は海中を広がりをもって球状に伝播していく。この広がりの角度を指向角と言う
が、深海用では指向角をあまり細くできない。一方において受波機を送波機と直角方
向(船の縦方向)に設置することで狭い範囲の受信をおこない、結果狭い指向角水深
を得ることとなる。ただしこの水深データは斜距離であるので送波機の傾きを補正し
て水深データとする。全送波機のトータルの扇形状の角度をスワス角と言う。スワス
角が大きければ水深が深くなるほど広い面データが得られる。 浅海用では送受波機
を 1 つのユニットとしてまとめたものも使用されている。10m 以浅ではその特色を発
揮できない。
5)水面観測
直接水準を除けば、測深は水面からの深さを測定するので、水面の昇降を観測しな
ければならない。
河川の測深においては、水面の高さは測線位置毎に違うので、そのつどあるいは数
本毎に水面観測を行わなければならない。湖沼に於いても水面の時間変動を観測する
必要がある。
海上に於いては、この水面の昇降は時間と共に規則正しく変化する潮汐であり、時
間変動の観測を験潮という。 験潮には臨時験潮と常設験潮所での観測がある。
臨時験潮には験潮柱あるいはスタッフ等による水面観測と、水圧式の験潮器による
ものがある。常設験潮所のおおくは、井戸式のフース型あるいはリシャール型験潮器
で観測を行っている。
現在日本の大部分の港湾に於いては、常設の験潮所が有るので其の資料を使用する
ことが出来る。
6)基準面について
日本において水深の基準面は、港湾の工事基準面及び海図の水深基準面(基本水準
面:DL)も一般に略最低々潮面を採用している。
海図の水深基準面は、各国で採用基準が若干異なっている。英国は、大潮の平均低
潮面、米国は、平均低潮面(大西洋岸)及び平均低々潮(太平洋側)、フランスでは、
最低々潮面を使用している。何れも航海の安全を考えて、潮位がそれ以下には殆ど下
らない様な面を採用している。
日本に於ける海図の水深の基準面の決定は、測地に於ける平均海面図下 Zo の位置
とする。 D.L = M.S.L-Zo である。
平均海面(M.S.L)の決定は長期の験潮記録より決定された値であるが、潮汐学的
には 19 年以上の駿潮資料になよる平均値が理想的であるとされている。しかしなが
ら 19 年間にわたる連続験潮資料は極めて少なく、又この期間中に地盤変動も考えら

れるので、逆効果になることもある。
通常最近 5 ケ年間(場合によっては1ケ年)の平均海面値(So:験潮器零位上の
値)とする。
平均海面が決定すれば、その後調和分解(フリー解析)によって得られた主要四分
潮(M2,S2,K1,O1 分潮)の振幅の和(Zo = Hm 十 Hs 十 H ′+ Ho)だけ下の面
を水深0 m の面である基本水準面とする。
主要四分潮は
主太陰半日周潮(M2)主太陽半日周潮(S2)日月合成日周潮(KI)主太陰日周潮(O1)である。
海図の基本水準面は各海域の平均海面下 Zo の位置になつており、その値は海上保
安庁発行の書誌第 741 号「平均水面及び基本水準面一覧表」に拠っている。
したがって基本水準面は、陸図の様な等ポテンシャル面(ジオイド面)に統一され
ているわけではない。また平均海面及び Zo の値は不動の値として考えられてはいな
く、従って基本水準面も変化する。
各地の港湾工事基準面は略最低々湖面を採用しているが、必ずしも海図の基本水準
面と一致してはいない。水深測量の基準面はその目的、発注機関等で異なるので駿潮
記録の使用にあたっては、潮高改正量だけではなく基準面の相違にも注意する必要が
ある。
横浜,川崎両港々湾工事基準面は、平成 20 年現在東京湾平均海面(TP)下 1.09mであり、一方海図基準面は平均海面(M.S.L.)下 1.15m となっている。
両港々湾工事基準面は海図の基本水準面と、現在は一致している。
一般的には港湾工事基準面は東京湾平均海面と関係付けられているが、海図の基本
水準面は関係付けられているとは限らない。

京浜港横浜に於ける諸基準面の関係を下図に示す。
7)海図の高さおよび深さの基準
6)で述べた通り深さの基準は略最低低潮面(L.L.W.L)である。建物あるいは灯台
灯高あるいは陸部等高線はジオイド面である。これに対して橋の桁下の高さは略最高
高潮面(H.H.W.L)である。なれも船舶の航行に支障ないように考えられている。
この略最高高潮面より高い陸地が不動産登記法に言う土地である。この点を連ねた
線が陸地線である。略最高高潮面と略最低低潮面の間を干出と言う。

8)音響測深器による水深の読み取りおよび補正
水深読み取りを行うには、まず基準線(水面)を決定し、潮位分下が基本水準面と
なり、ここにパーセントスケールを当てて水深を読み取る。
パーセントスタイルおよび実効発振線の決定は、バーチェック記録よりを行ない、
割込み行なった後、実効発振線より送受波器の吃水分上が、実際の基準線(水面)と
なる。
*バーチェックおよび実効発振線* (次ページ参照)
音響測深機は、海水中の音速を 1500m / sec と仮定して作製されているが、実際
の海水中の音速は、海水の密度(塩分濃度)と温度および水圧により変化する。
一般的には 50m 以深は、上記 3 要素を測定し音速補正を行なうが、以浅ではバー
チェック法によっている。
バーチェック法は、送受波器直下に反射板(バー)を 2m 毎に降下上昇させて、各
深度のバーからの反射を記録させ、仮定音速と実際の音速との比率を決定する方法で
ある。
音響測深器の発振線は、機械的誤差のため記録紙上位置と実際の発振位置がずれる
ことある、この実際の位置のことを実効発振位置(発振線)と言う。
実動発振位置の決定は、バーチェック各深度記録に最も合うパーセントスケールを
決定し、パーセントスケールの0位置を実効発振位置とする。