Embed Size (px)
Citation preview
Fakultät Maschinenbau
Studienarbeit
„Ermittlung der Kapazität von Straßen
durch Fahrzeugmessungen im
Verkehrsfluss“
Daniel Schäfer (Matr.-Nr. 43198, Semester MBA6)
Nemanja Blagojevic (Matr.-Nr. 43304, Semester MBA6)
Betreuender Professor: Prof. Dr. G. Willmerding
Inhaltsverzeichnis:
1 Einleitung ............................................................................................................. 1
1.1 Motivation für die Studienarbeit ......................................................................... 1
1.2 Verkehrsentwicklung, Verkehrsanalyse und Messung ...................................... 2
2 Hauptteil .............................................................................................................. 8
2.1 Hinführung zum Thema - Definition Begriffe ..................................................... 8
2.1.1 Verkehrsart ............................................................................................. 8
2.1.2 Verkehrsfluss ........................................................................................ 10
2.1.3 Nagel-Schreckenberg-Modell................................................................ 14
2.1.4 Verkehrsdichte ...................................................................................... 15
2.1.5 Verkehrsstärke ...................................................................................... 16
2.1.6 Kapazität einer Straße .......................................................................... 16
2.1.7 Fundamentaldiagramm ......................................................................... 17
2.1.8 Zeitlücke................................................................................................ 20
2.1.9 Weglücke .............................................................................................. 21
2.2 Entwicklung des Fundamentaldiagramms ....................................................... 21
2.3 Messfahrt ........................................................................................................ 24
2.3.1 Fahrzeuge und Ausstattung .................................................................. 27
2.3.2 Messsoftware (winEVA, winADAM, winMAP) ....................................... 29
2.3.3 Ablauf .................................................................................................... 32
2.3.3.1 Hinfahrt .............................................................................................. 32
2.3.3.2 Rückfahrt............................................................................................ 33
2.4 Auswertung der Messdaten ............................................................................ 35
2.4.1 Anleitung zur Verarbeitung der Messdaten ........................................... 35
2.4.2 Messtabellen ......................................................................................... 44
2.5 Analyse der Fundamentaldiagramme ............................................................. 46
3 Zusammenfassung ............................................................................................ 55
4 Glossar .............................................................................................................. 57
5 Quellenverzeichnis ............................................................................................ 58
Abbildungsverzeichnis:
Abbildung 1: Kraftfahrzeugbestand (eigene Darstellung, basierend auf Datenreport
2006, Kraftfahrt-Bundesamt ) ..................................................................................... 2
Abbildung 2: Erste Messungen zum Fundamentaldiagramm durch Greenshields 1935
(Kühne, R. (2004): FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm -
Grundlagen und Anwendungen 01.07.2010) .............................................................. 5
Abbildung 3: PELOPS Programmstruktur (Quelle: www.pelops.de, 01.07.2010) ....... 6
Abbildung 4: Verkehrsarten (www.wikipedia.de; 10.07.2010)................................... 10
Abbildung 5: Fundamentaldiagramm (Darstellung v über D) (www.wikipedia.de;
02.07.2010) .............................................................................................................. 11
Abbildung 6: Fundamentaldiagramm (Darstellung Q über v) (www.wikipedia.de;
02.07.2010) .............................................................................................................. 13
Abbildung 7: Fundamentaldiagramm (Darstellung Q über D) (www.wikipedia.de;
02.07.2010) .............................................................................................................. 13
Abbildung 8: Fundamentaldiagramm in der 3-dimensionalen Darstellung (Wu, Ning
(2000): Straßenverkehrstechnik, Heft 8; 03.07.2010) ............................................... 17
Abbildung 9: Darstellungsformen des Fundamentaldiagramms (Kühne, R. (2004):
FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm - Grundlagen und
Anwendungen 01.07.2010) ....................................................................................... 18
Abbildung 10: Nettozeitlücke (www.wikipedia.de; 01.07.2010) ................................. 20
Abbildung 11: Bruttozeitlücke (www.wikipedia.de; 01.07.2010) ................................ 20
Abbildung 12: Erstes mathematisches Modell zur Beschreibung des Verkehrsablaufs
auf Schnellstraßen von Greenshields 1935 (Kühne, R. (2004): FGSV Merkblatt
(Entwurf) Das Fundamentaldiagramm - Grundlagen und Anwendungen 01.07.2010)
................................................................................................................................. 22
Abbildung 13: q-k-Beziehung von Lighthill und Whitham (1955) (Kühne, R. (2004):
FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm - Grundlagen und
Anwendungen 01.07.2010) ....................................................................................... 22
Abbildung 14: q-k-Relation von Edie 1961 (Kühne, R. (2004): FGSV Merkblatt
(Entwurf) Das Fundamentaldiagramm - Grundlagen und Anwendungen 01.07.2010)
................................................................................................................................. 23
Abbildung 15: Zweibereichsmodell für den Verkehrsfluss (May und Keller 1968)
(Kühne, R. (2004): FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm -
Grundlagen und Anwendungen 01.07.2010) ............................................................ 23
Abbildung 16: Google Earth Streckendarstellung (Eigenes Verzeichnis) ................. 24
Abbildung 17: Messfahrzeug IVECO Bus (Prof. Willmerding, G., 2009: Laborversuch
/ Messdatenerfassung im Verkehr; 01.07.2010) ....................................................... 27
Abbildung 18: Laptop mit Sensorbox und GPS-Antenne (Prof. Willmerding, G:
winADAM - Automatisierte DAtenerfassung im Mobilen Einsatz; 01.07.2010) ......... 28
Abbildung 19: SLK mit installierter Kamera und Messsystem auf Beifahrersitz (Prof.
Willmerding, Präsentation Werkzeuge zur Antriebsstrangentwicklung; 01.07.2010) 28
Abbildung 20: WinMAP Signalverlauf (Eigenes Verzeichnis) ................................... 30
Abbildung 21: WinMAP Kartendarstellung (Eigenes Verzeichnis) ............................ 31
Abbildung 22: WinMAP Videofenster (Eigenes Verzeichnis) .................................... 31
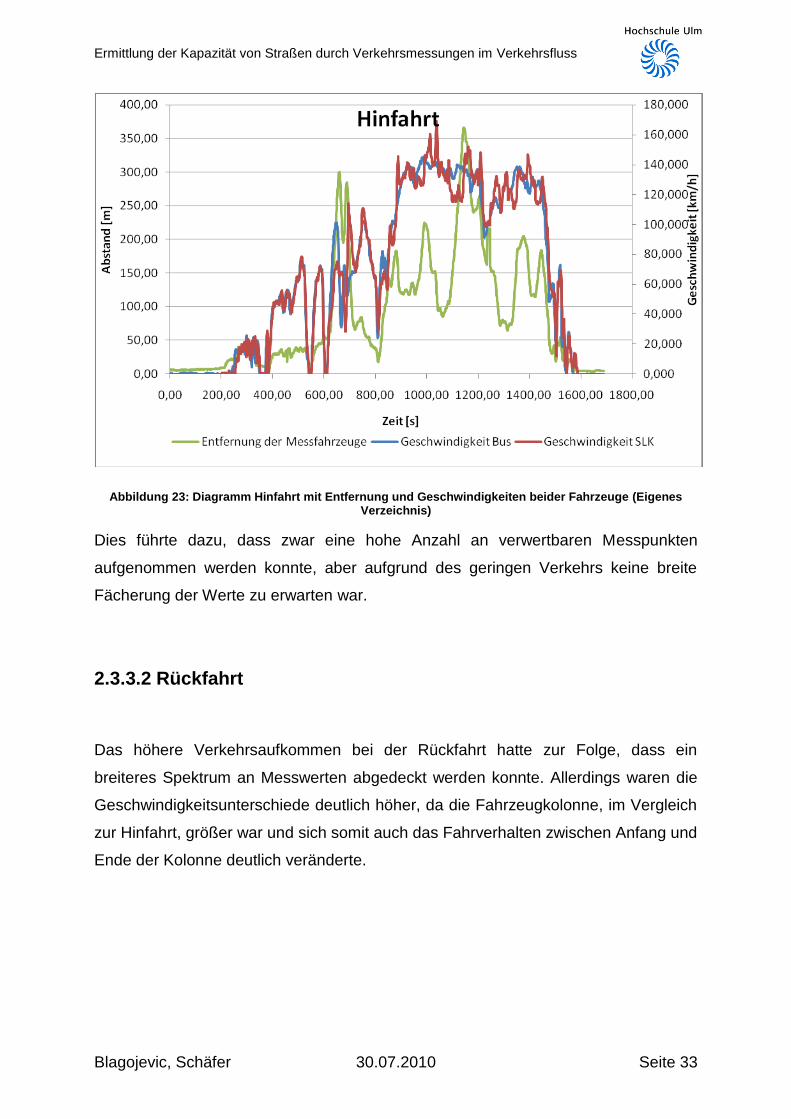
Abbildung 23: Diagramm Hinfahrt mit Entfernung und Geschwindigkeiten beider
Fahrzeuge (Eigenes Verzeichnis) ............................................................................. 33
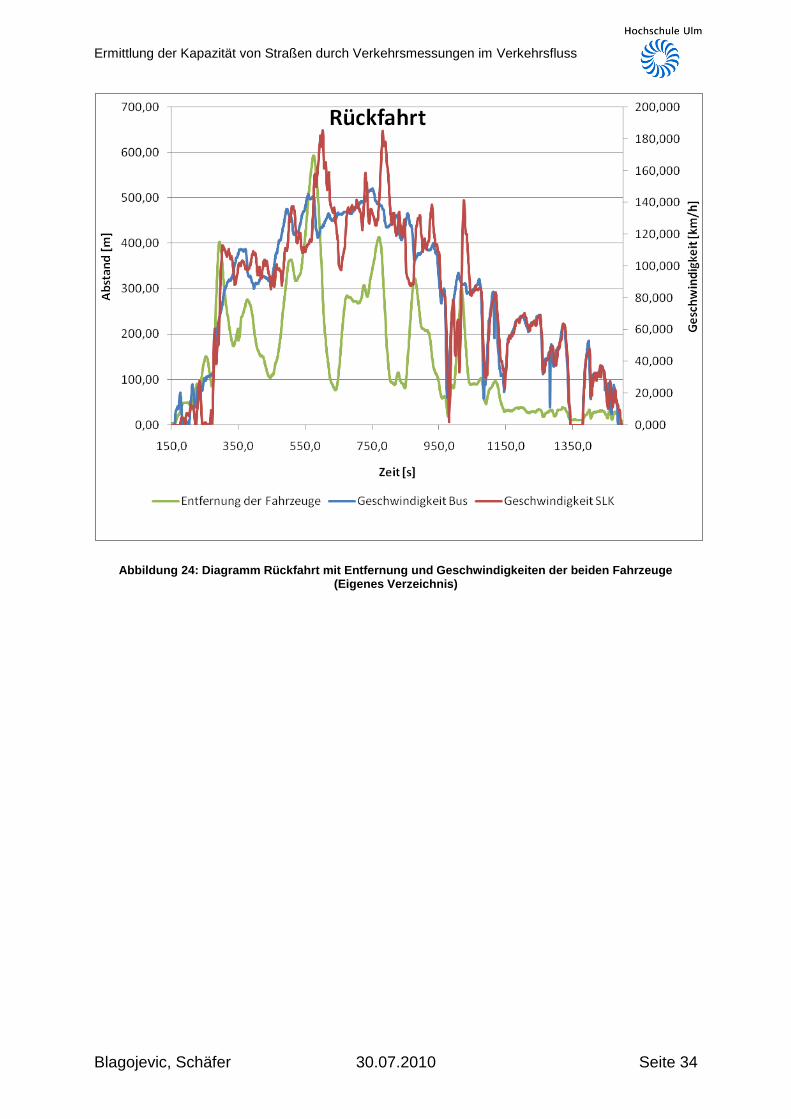
Abbildung 24: Diagramm Rückfahrt mit Entfernung und Geschwindigkeiten der
beiden Fahrzeuge (Eigenes Verzeichnis) ................................................................. 34
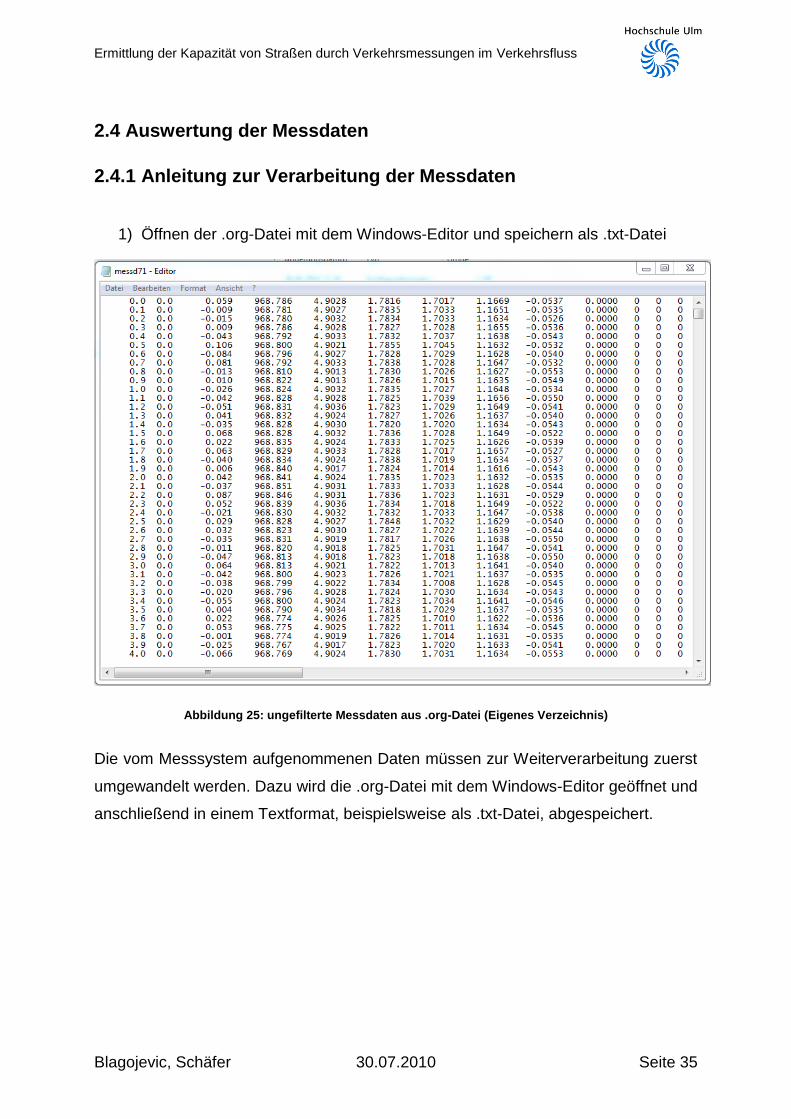
Abbildung 25: ungefilterte Messdaten aus .org-Datei (Eigenes Verzeichnis) ........... 35
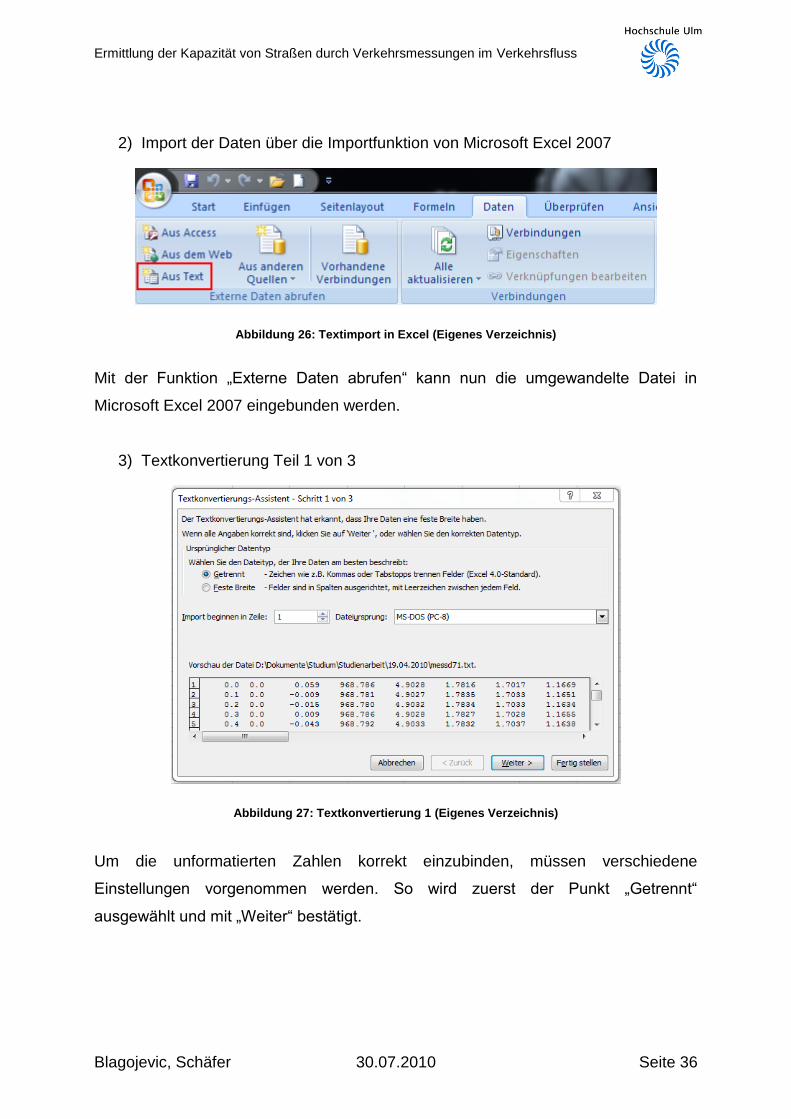
Abbildung 26: Textimport in Excel (Eigenes Verzeichnis) ........................................ 36
Abbildung 27: Textkonvertierung 1 (Eigenes Verzeichnis) ....................................... 36
Abbildung 28: Textkonvertierung 2 (Eigenes Verzeichnis) ....................................... 37
Abbildung 29: Textkonvertierung 3 (Eigenes Verzeichnis) ....................................... 37
Abbildung 30: Kanalbelegung WinEVA (Eigenes Verzeichnis) ................................. 38
Abbildung 31: Markieren der Spalte „TOW_GPS“ (Eigenes Verzeichnis) ................ 39
Abbildung 32: Markierung erweitern (Eigenes Verzeichnis) ..................................... 39
Abbildung 33: Sortieren aller Spalten nach „TOW_GPS“ (Eigenes Verzeichnis) ...... 40
Abbildung 34: Löschen aller Zeilen mit „TOW_GPS“ = „-1“ (Eigenes Verzeichnis) .. 40
Abbildung 35: Nach dem Löschen der überflüssigen „TOW_GPS“-Zeit (Eigenes
Verzeichnis) .............................................................................................................. 41
Abbildung 36: Filtern Löschen der überflüssigen Spalten (Eigenes Verzeichnis) ..... 41
Abbildung 37: Berechnung Vges (Eigenes Verzeichnis) ............................................ 42
Abbildung 38: Berechnung der Entfernung SLK und Bus (Eigenes Verzeichnis) ..... 43
Abbildung 39: Berechnung ∆V = 5 km/h (Eigenes Verzeichnis) ............................... 43
Abbildung 40: Fundamentaldiagramm v über D (Eigenes Verzeichnis) .................... 49

Abbildung 41: Fundamentaldiagramm Q über v (Eigenes Verzeichnis) ................... 51
Abbildung 42: Fundamentaldiagramm Q über D (Eigenes Verzeichnis) ................... 53
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 1
1 Einleitung
1.1 Motivation für die Studienarbeit
Im Rahmen des sechsten Semesters muss als zusätzliche Studienleistung eine
Studienarbeit als Vorbereitung auf die Bachelorarbeit verfasst werden. Auf der Suche
nach einem interessanten Thema wurden wir auf eine Ausschreibung mit dem Titel
„Ermittlung der Kapazität von Straßen durch Fahrzeugmessungen im Verkehrsfluss“
von Herrn Prof. Dr. G. Willmerding aufmerksam. Hierbei ging es um die
messtechnische Bestimmung eines Fundamentaldiagramms im realen
Straßenverkehr.
Vorgaben aus der Aufgabenstellung waren dabei folgende:
Zwei Fahrzeuge, die mit Messtechnik zur Positionsbestimmung,
Geschwindigkeitsmessung und Videoaufzeichnung ausgestattet sind, fahren auf der
Autobahn A8 Ulm Richtung Stuttgart im Verkehrsfluss mit. Die Zahl der sich
zwischen diesen beiden Messfahrzeugen befindenden Fahrzeuge soll ermittelt
werden, um daraus die Kapazität der Straße berechnen zu können. Die Auswertung
der Messdaten erfolgt in Microsoft Excel 2007 und bildet die Grundlage für das
Fundamentaldiagramm zur Ermittlung der Kapazität einer Straße.
Diese Aufgabenstellung versprach eine abwechslungsreiche und ansprechende
Tätigkeit, die sowohl eine Messung im realen Straßenverkehr, als auch eine
theoretische Auseinandersetzung mit dem Thema „Verkehr“ im Allgemeinen
beinhaltet. Da wir mit diesem Thema im bisherigen Studium noch nicht konfrontiert
wurden, ergriffen wir die Chance, auf diesem Gebiet Erfahrungen zu sammeln.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 2
1.2 Verkehrsentwicklung, Verkehrsanalyse und Messung
Mobilität und Verkehr bilden einen wichtigen Eckpfeiler unserer Gesellschaft und sind
eine wesentliche Grundlage der Zivilisation und Wirtschaft. Über Jahrhunderte
wurden Verkehrswege geschaffen und immer neue Verkehrsmittel entwickelt. Sie
dienen der Raum-Überwindung von Menschen und Gütern, d. h. dem Transport, und
bilden eine wichtige Voraussetzung für Mobilität als humanen und sozialen Wert an
sich.
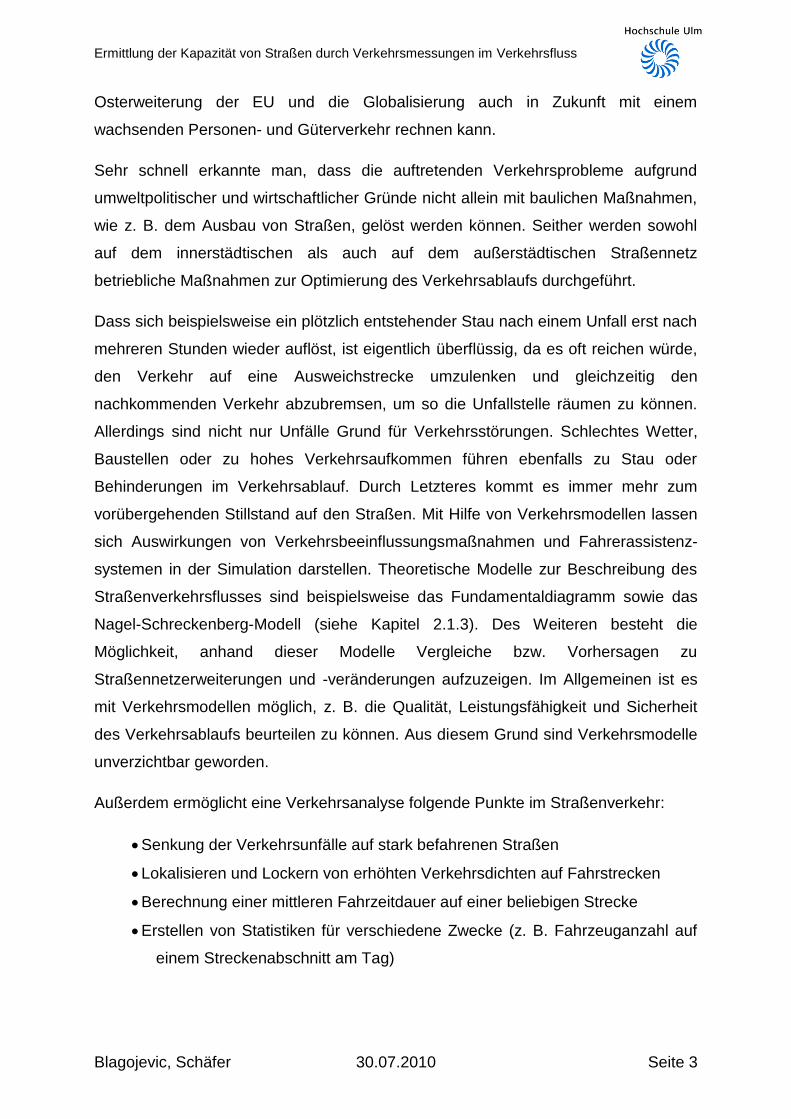
Abbildung 1: Kraftfahrzeugbestand (eigene Darstellung, basierend auf Datenreport 2006, Kraftfahrt-Bundesamt )
Aufgrund der rapiden Zunahme des Straßenverkehrsaufkommens in Deutschland
seit den 50er-Jahren, kommt es trotz erheblicher Ausbaumaßnahmen des
Straßennetzes immer rascher zu Verkehrsüberlastungen.
Zudem ist Deutschland aufgrund seiner zentralen geografischen Lage in Europa ein
wichtiger und unverzichtbarer Verkehrsknotenpunkt, welcher durch die
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 3
Osterweiterung der EU und die Globalisierung auch in Zukunft mit einem
wachsenden Personen- und Güterverkehr rechnen kann.
Sehr schnell erkannte man, dass die auftretenden Verkehrsprobleme aufgrund
umweltpolitischer und wirtschaftlicher Gründe nicht allein mit baulichen Maßnahmen,
wie z. B. dem Ausbau von Straßen, gelöst werden können. Seither werden sowohl
auf dem innerstädtischen als auch auf dem außerstädtischen Straßennetz
betriebliche Maßnahmen zur Optimierung des Verkehrsablaufs durchgeführt.
Dass sich beispielsweise ein plötzlich entstehender Stau nach einem Unfall erst nach
mehreren Stunden wieder auflöst, ist eigentlich überflüssig, da es oft reichen würde,
den Verkehr auf eine Ausweichstrecke umzulenken und gleichzeitig den
nachkommenden Verkehr abzubremsen, um so die Unfallstelle räumen zu können.
Allerdings sind nicht nur Unfälle Grund für Verkehrsstörungen. Schlechtes Wetter,
Baustellen oder zu hohes Verkehrsaufkommen führen ebenfalls zu Stau oder
Behinderungen im Verkehrsablauf. Durch Letzteres kommt es immer mehr zum
vorübergehenden Stillstand auf den Straßen. Mit Hilfe von Verkehrsmodellen lassen
sich Auswirkungen von Verkehrsbeeinflussungsmaßnahmen und Fahrerassistenz-
systemen in der Simulation darstellen. Theoretische Modelle zur Beschreibung des
Straßenverkehrsflusses sind beispielsweise das Fundamentaldiagramm sowie das
Nagel-Schreckenberg-Modell (siehe Kapitel 2.1.3). Des Weiteren besteht die
Möglichkeit, anhand dieser Modelle Vergleiche bzw. Vorhersagen zu
Straßennetzerweiterungen und -veränderungen aufzuzeigen. Im Allgemeinen ist es
mit Verkehrsmodellen möglich, z. B. die Qualität, Leistungsfähigkeit und Sicherheit
des Verkehrsablaufs beurteilen zu können. Aus diesem Grund sind Verkehrsmodelle
unverzichtbar geworden.
Außerdem ermöglicht eine Verkehrsanalyse folgende Punkte im Straßenverkehr:
Senkung der Verkehrsunfälle auf stark befahrenen Straßen
Lokalisieren und Lockern von erhöhten Verkehrsdichten auf Fahrstrecken
Berechnung einer mittleren Fahrzeitdauer auf einer beliebigen Strecke
Erstellen von Statistiken für verschiedene Zwecke (z. B. Fahrzeuganzahl auf
einem Streckenabschnitt am Tag)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 4
Um eine Verkehrsanalyse durchführen zu können, gibt es verschiedene
Vorgehensweisen bzw. Möglichkeiten. Die folgende Auswahl stellt nur einen kleinen
Teil der möglichen Verkehrsanalysen dar und soll somit zur Veranschaulichung
dienen.
Verkehrsanalysen allgemein werden untergliedert in stationäre Messungen und
Messungen im Verkehrsfluss.
Dabei gelten folgende Grundüberlegungen:
Messung im Verkehrsfluss:
Für eine Messung, wie sie auch in der ausgearbeiteten Studienarbeit durchgeführt
wurde, benötigt man mindestens zwei Messfahrzeuge, ausgestattet mit GPS, sowie
zwei Videokameras zur Erfassung der Fahrzeuganzahl zwischen beiden
Messsystemen.
Messung stationär:
Die häufigste und einfachste Messung ist die Zählung des Verkehrs mit
Schlauchgeräten. Dabei wird ein Schlauch über die Fahrspur gelegt, der dann auf
den Druck eines Reifens reagiert.
Alle fünf Jahre wird zudem für das Straßenbauamt eine Zählung der
unterschiedlichen Verkehrsteilnehmer an Hauptstraßen durchgeführt. Diese Zählung
erfolgt bundesweit. Oft werden hierfür Studenten oder Schüler beauftragt, die
Fahrzeuge in eine Liste einzutragen.
Eine weitere Art der Verkehrsmessung ist eine Kombination aus Verkehrszählung
und Geschwindigkeitsmessung. Hier werden Messgeräte mehrere Tage im
Straßenabschnitt installiert, welche dann detaillierte Ergebnisse wie z. B. die Anzahl
des Schwerverkehrs oder die Spitzenstunden ermitteln. Vorteilhaft ist ein solcher
Aufbau, wenn Probleme mit dem Verkehrsaufkommen einer Straße bekannt sind.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 5
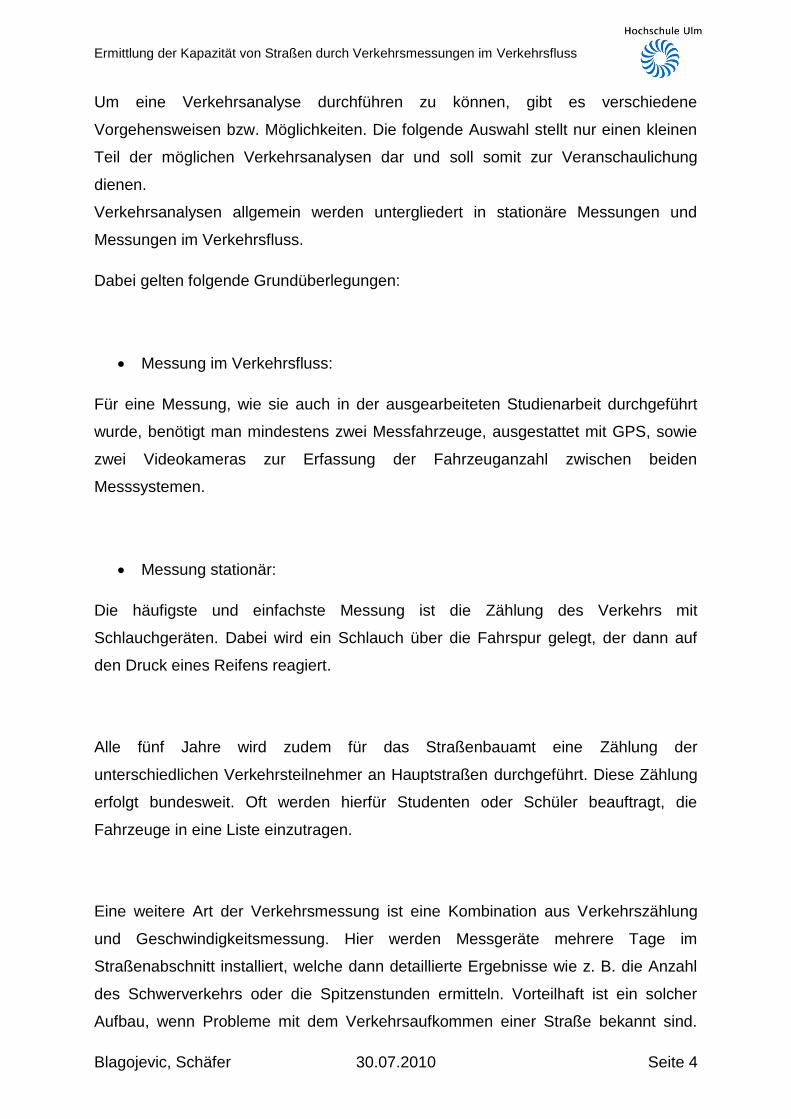
Einsatzgebiet einer solchen Installation sind oft Hauptverkehrsstraßen oder Straßen
mit erhöhtem Verkehrsaufkommen.
Abbildung 2: Erste Messungen zum Fundamentaldiagramm durch Greenshields 1935 (Kühne, R. (2004): FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm - Grundlagen und Anwendungen 01.07.2010)
Ein Beispiel für ein Verkehrs-Simulationsprogramm, das in der Praxis verwendet
wird, ist PELOPS (Programm zur Entwicklung längsdynamischer, mikroskopischer
Verkehrsprozesse in systemrelevanter Umgebung). Mit diesem Programm, entwickelt
von der Forschungsgesellschaft Kraftfahrwesen mbH Aachen (fka) in
Zusammenarbeit mit der BMW AG, können mikroskopische fahrzeugorientierte
Verkehrssimulationen erstellt werden.
PELOPS ermöglicht eine Untersuchung des längsdynamischen Fahrzeugverhaltens
sowie eine Analyse des Verkehrsablaufs. Dabei arbeitet das Programm mit einer
Verknüpfung aus detaillierten, submikroskopischen Fahrzeugmodellen und
mikroskopischen, verkehrstechnischen Modellen. Vorteilhaft an dieser
Vorgehensweise ist, dass alle Wechselwirkungen zwischen Fahrer, Fahrzeug und
Verkehr berücksichtigt werden können. Das Hauptaugenmerk von PELOPS liegt,
anders als bei den klassischen Simulationswerkzeugen, die in der Automobilindustrie
angewendet werden und oft nur ein Teilsystem oder ein isoliertes Gesamtfahrzeug
abbilden, auf der Simulation der wesentlichen Verkehrselemente: Strecke bzw.
Umwelt, Fahrzeug und Fahrer einschließlich ihrer Wechselwirkungen. Diese
Elemente werden modelliert und durch Schnittstellen abgegrenzt.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 6
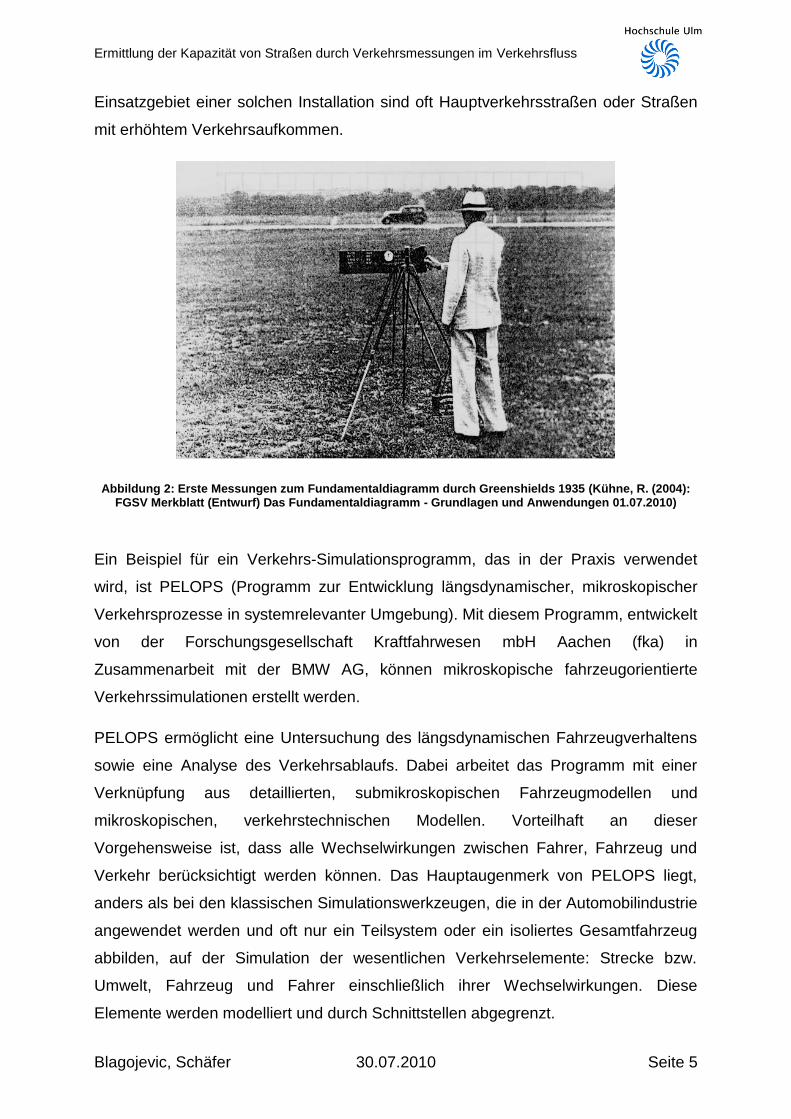
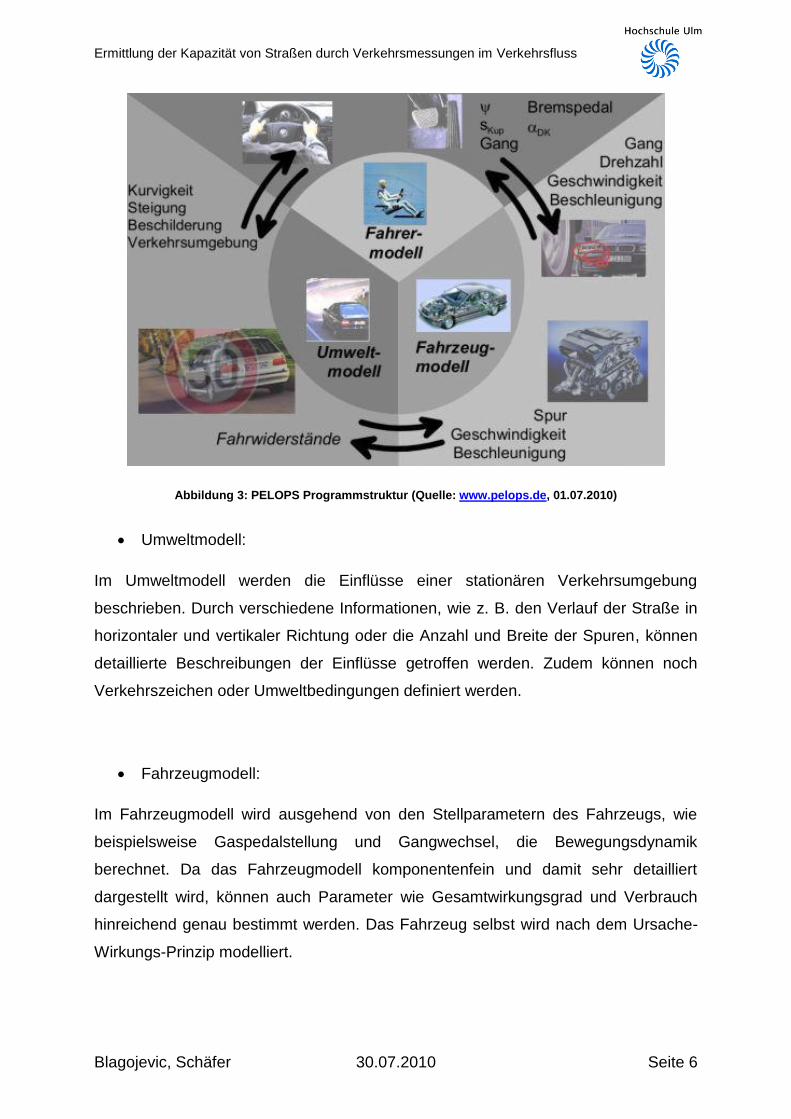
Abbildung 3: PELOPS Programmstruktur (Quelle: www.pelops.de, 01.07.2010)
Umweltmodell:
Im Umweltmodell werden die Einflüsse einer stationären Verkehrsumgebung
beschrieben. Durch verschiedene Informationen, wie z. B. den Verlauf der Straße in
horizontaler und vertikaler Richtung oder die Anzahl und Breite der Spuren, können
detaillierte Beschreibungen der Einflüsse getroffen werden. Zudem können noch
Verkehrszeichen oder Umweltbedingungen definiert werden.
Fahrzeugmodell:
Im Fahrzeugmodell wird ausgehend von den Stellparametern des Fahrzeugs, wie
beispielsweise Gaspedalstellung und Gangwechsel, die Bewegungsdynamik
berechnet. Da das Fahrzeugmodell komponentenfein und damit sehr detailliert
dargestellt wird, können auch Parameter wie Gesamtwirkungsgrad und Verbrauch
hinreichend genau bestimmt werden. Das Fahrzeug selbst wird nach dem Ursache-
Wirkungs-Prinzip modelliert.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 7
Fahrermodell:
Das Fahrermodell ist in zwei Teilbereiche, das Verhaltens- und das
Handlungsmodell, gegliedert. Dabei definiert das Verhaltensmodell die Parameter,
also die gewünschte Beschleunigung, die Fahrspur und eventuell den einzulegenden
Gang der lokalen Fahrstrategie aus dem aktuellen Fahrzustand und der
Fahrzeugumgebung, während im Handlungsmodell diese Parameter in
fahrzeugseitige Stellgrößen, zum Beispiel Lenkbewegung, Gangwahl oder
Pedalbetätigung, umgesetzt werden.
Das Verhaltensmodell besteht wiederum aus zwei Teilen, dem Folge- und dem
Spurwechselmodell. Im Folgemodell wird der Verkehr auf einer einspurigen
Richtungsbahn beschrieben, das heißt auf einer Bahn, auf der es keine Möglichkeit
zum Überholen oder Spurwechseln gibt.
Das Spurwechselmodell deckt hingegen alle Verkehrssituationen ab, die auf
mehrspurigen Straßen und im innerstädtischen Verkehr auftreten. Dabei werden
nicht nur klassische Spurwechselsituationen, wie z. B. das Überholen auf
mehrspurigen Fahrbahnen oder das Ausweichen von Hindernissen, sondern auch
taktische Überlegungen, wie z. B. das Blinken, um ein Hereinlassen in enge Lücken
zu provozieren, beachtet. Zusammen ermöglichen Fahrer- und Umweltmodell die
Generierung von virtuellem Verkehr.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 8
2 Hauptteil
2.1 Hinführung zum Thema - Definition Begriffe
2.1.1 Verkehrsart
Unter Verkehrsart versteht man die Unterscheidung des Verkehrs innerhalb eines
fest vorgegebenen Gebiets, auch Verkehrszelle, Verkehrsgebiet oder Verkehrsbezirk
genannt.
Verkehrszellen bzw. – gebiete werden bei der Planung neuer Straßen benötigt. Dazu
wird der aktuell vorhandene Verkehr in einer Zelle analysiert, um somit eine
Verkehrsprognose erstellen zu können. Diese wird benötigt, um die Vermessung
bzw. Auslegung der neuen Straße ermöglichen zu können. Deshalb wird eine
Einteilung des Verkehrs in entsprechende Kategorien benötigt.
Man unterscheidet zunächst zwischen öffentlichem und privatem Verkehr:
Öffentlicher Verkehr:
Unter öffentlichem Verkehr versteht man die Beförderung durch öffentliche
Verkehrsmittel. Dazu zählt sowohl der schienengebundene Verkehr als auch der
öffentliche Verkehr auf Straßen.
Individualverkehr:
Als Individualverkehr bezeichnet man Verkehr, der durch Privatfahrzeuge entsteht.
Dazu zählen neben dem normalen Kfz-Verkehr auch der (motorisierte) Zweirad- und
Fußgängerverkehr. Unterteilt wird der Individualverkehr in Personen- und
Güterbeförderung.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 9
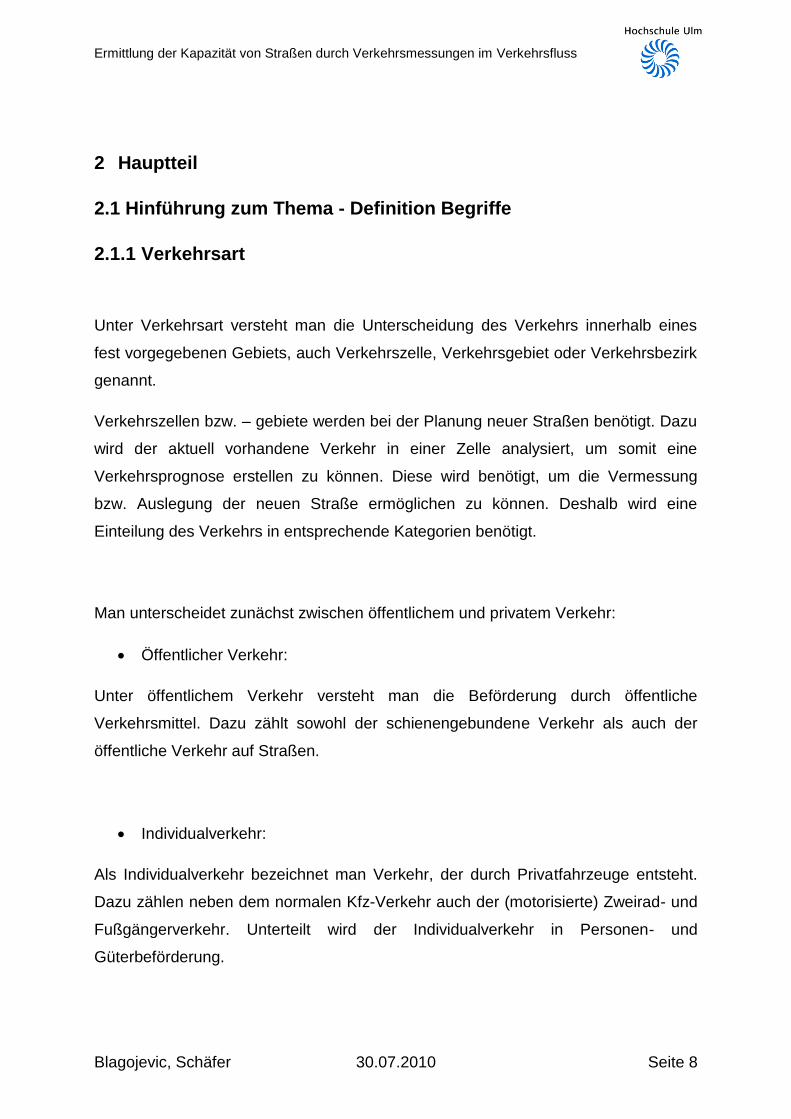
Öffentlicher und privater Verkehr werden weiter unterteilt nach ihrem Gebietsbezug:
Durchgangsverkehr:
Durchgangsverkehr beschreibt das Verkehrsaufkommen, welches durch die
betrachtete Verkehrszelle hindurch fährt.
Gebrochener Durchgangsverkehr:
Ähnlich wie beim Durchgangsverkehr wird auch hier die Verkehrszelle durchfahren,
jedoch wird die Fahrt spontan für einen kurzen Zeitraum unterbrochen (z. B. aufgrund
von Einkäufen, Kurzbesuchen, Ruhepausen).
Quellverkehr:
Quellverkehr beinhaltet Verkehrsteilnehmer, die ihre Fahrt innerhalb der
Verkehrszelle beginnen und aus der Zelle hinausfahren.
Zielverkehr:
Anders als beim Quellverkehr startet hier der Verkehr außerhalb der betrachteten
Zelle und fährt in diese hinein bzw. endet dort.
Binnenverkehr:
Als Binnenverkehr bezeichnet man die Summe aller Verkehrsvorgänge innerhalb der
Verkehrszelle, d. h. der betrachtete Verkehr startet und endet in der Zelle.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 10
Abbildung 4: Verkehrsarten (www.wikipedia.de; 10.07.2010)
2.1.2 Verkehrsfluss
Mit dem Begriff Verkehrsfluss Q wird der Fluss, also die Anzahl n der Fahrzeuge, die
einen bestimmten Straßenabschnitt pro Zeiteinheit durchquert, bezeichnet.
Beschreibt man diese Vorgabe mathematisch, so ergibt sich die folgende Formel:
. Im Straßenverkehr versteht man unter diesem Begriff die
Ausnutzung der Verkehrswege durch den fahrenden Verkehr. d.h. nimmt bei höheren
Geschwindigkeiten der Verkehrsfluss vorerst einmal zu, kann aber durch
entsprechende Beeinträchtigungen wie gegenseitige Behinderungen durch größere
Geschwindigkeitsunterschiede wieder abnehmen.
Folgende Verkehrsflüsse sind zu betrachten:
Freier Verkehrsfluss (stabiler Zustand):
Eine freie Überholmöglichkeit sowie die Wahl der Wunschgeschwindigkeit sind
möglich, da der Fahrer sich nur nach den Gegebenheiten der Straße und des
Fahrzeuges richtet. Es findet keine Behinderung durch andere Verkehrsteilnehmer
statt.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 11
Teilgebundener Verkehrsfluss (metastabiler Zustand):
Eine freie Überholmöglichkeit und Geschwindigkeitswahl ist nicht mehr für jeden
Verkehrsteilnehmer möglich, da durch ein stärkeres Verkehrsaufkommen die
gegenseitige Behinderung stark zunimmt. Die mittlere Geschwindigkeit des
Verkehrsflusses sinkt ab.
Gebundener Verkehrsfluss (instabiler Zustand):
Durch Kolonnenbildung der Fahrzeuge sind gewünschte Überholungen und
Geschwindigkeiten nicht mehr möglich. Steigt die Verkehrsdichte weiter an, sinkt die
mittlere Geschwindigkeit weiter und die Verkehrsstärke nimmt wieder ab. Kommt es
zum Kolonnenstillstand, ist die Verkehrsstärke gleich Null. Zum gebundenen
Verkehrsfluss zählen stockender Verkehr (niedrige, extrem schwankende
Geschwindigkeit bei hoher Verkehrsstärke), gestauter Verkehr (niedrige
Geschwindigkeit und sehr niedrige Verkehrsstärke) und stehender Verkehr
(Geschwindigkeit und Verkehrsstärke gegen Null).
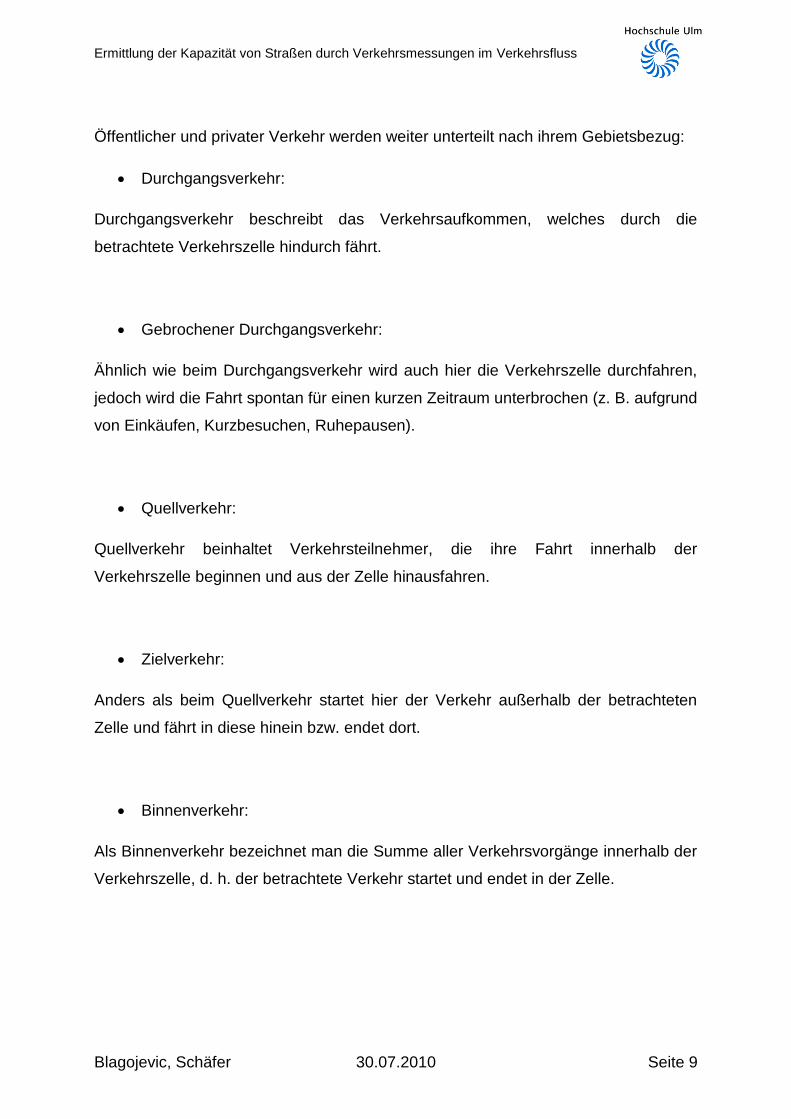
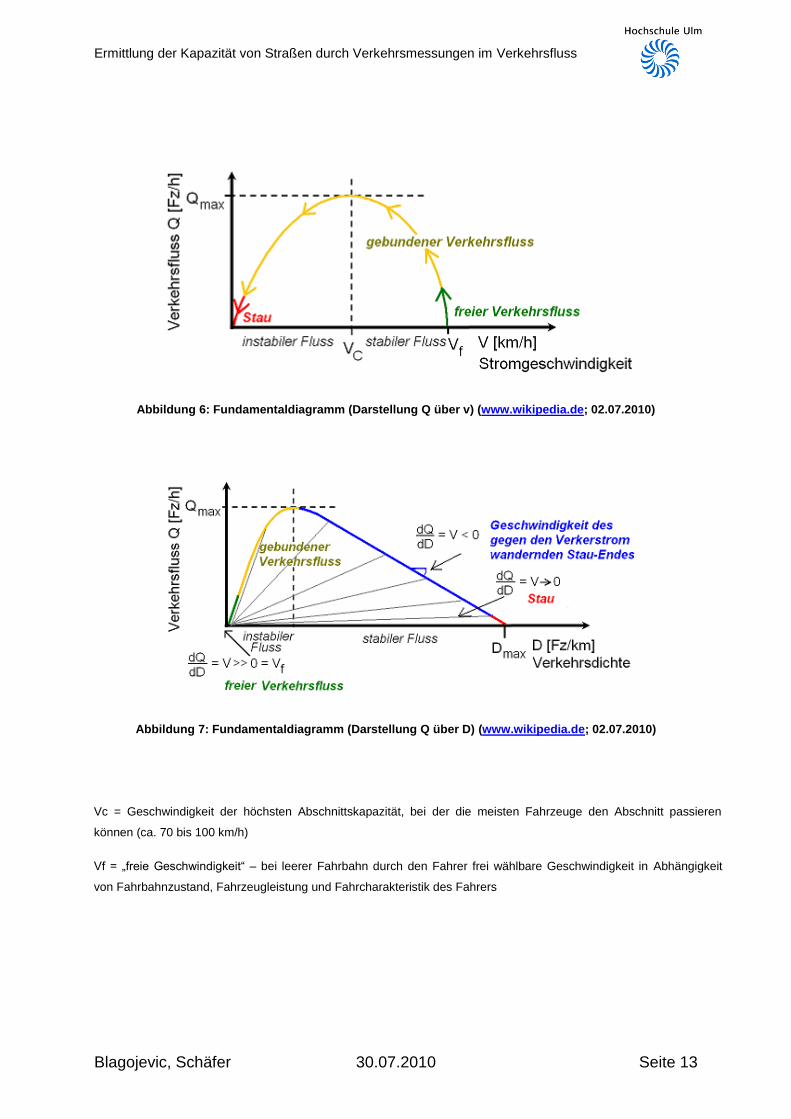
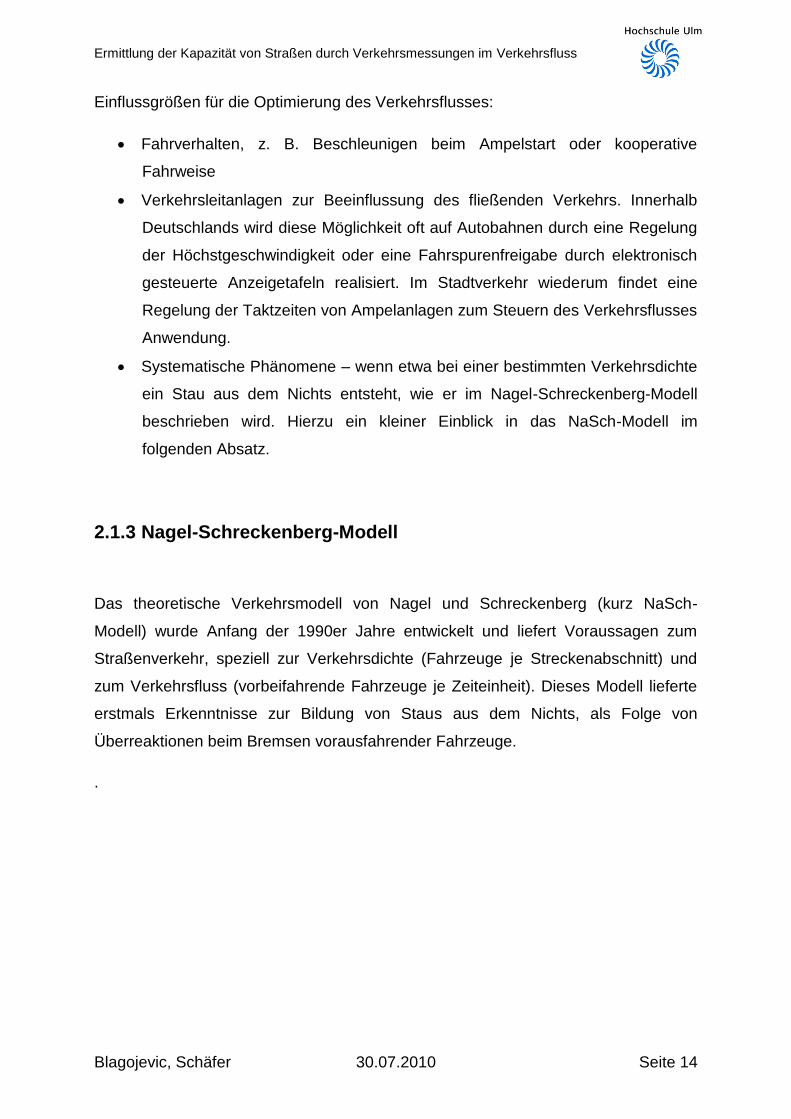
In den folgenden Abbildungen ist das Fundamentaldiagramm in den verschiedenen
Darstellungsmöglichkeiten aufgeführt. Im jeweiligen Diagramm sind die
verschiedenen Verkehrszustände (freier Verkehrsfluss, gebundener Verkehrsfluss,
Stau) aufgeführt.
Abbildung 5: Fundamentaldiagramm (Darstellung v über D) (www.wikipedia.de; 02.07.2010)

Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 12
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 13
Abbildung 6: Fundamentaldiagramm (Darstellung Q über v) (www.wikipedia.de; 02.07.2010)
Abbildung 7: Fundamentaldiagramm (Darstellung Q über D) (www.wikipedia.de; 02.07.2010)
Vc = Geschwindigkeit der höchsten Abschnittskapazität, bei der die meisten Fahrzeuge den Abschnitt passieren
können (ca. 70 bis 100 km/h)
Vf = „freie Geschwindigkeit“ – bei leerer Fahrbahn durch den Fahrer frei wählbare Geschwindigkeit in Abhängigkeit
von Fahrbahnzustand, Fahrzeugleistung und Fahrcharakteristik des Fahrers
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 14
Einflussgrößen für die Optimierung des Verkehrsflusses:
Fahrverhalten, z. B. Beschleunigen beim Ampelstart oder kooperative
Fahrweise
Verkehrsleitanlagen zur Beeinflussung des fließenden Verkehrs. Innerhalb
Deutschlands wird diese Möglichkeit oft auf Autobahnen durch eine Regelung
der Höchstgeschwindigkeit oder eine Fahrspurenfreigabe durch elektronisch
gesteuerte Anzeigetafeln realisiert. Im Stadtverkehr wiederum findet eine
Regelung der Taktzeiten von Ampelanlagen zum Steuern des Verkehrsflusses
Anwendung.
Systematische Phänomene – wenn etwa bei einer bestimmten Verkehrsdichte
ein Stau aus dem Nichts entsteht, wie er im Nagel-Schreckenberg-Modell
beschrieben wird. Hierzu ein kleiner Einblick in das NaSch-Modell im
folgenden Absatz.
2.1.3 Nagel-Schreckenberg-Modell
Das theoretische Verkehrsmodell von Nagel und Schreckenberg (kurz NaSch-
Modell) wurde Anfang der 1990er Jahre entwickelt und liefert Voraussagen zum
Straßenverkehr, speziell zur Verkehrsdichte (Fahrzeuge je Streckenabschnitt) und
zum Verkehrsfluss (vorbeifahrende Fahrzeuge je Zeiteinheit). Dieses Modell lieferte
erstmals Erkenntnisse zur Bildung von Staus aus dem Nichts, als Folge von
Überreaktionen beim Bremsen vorausfahrender Fahrzeuge.
.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 15
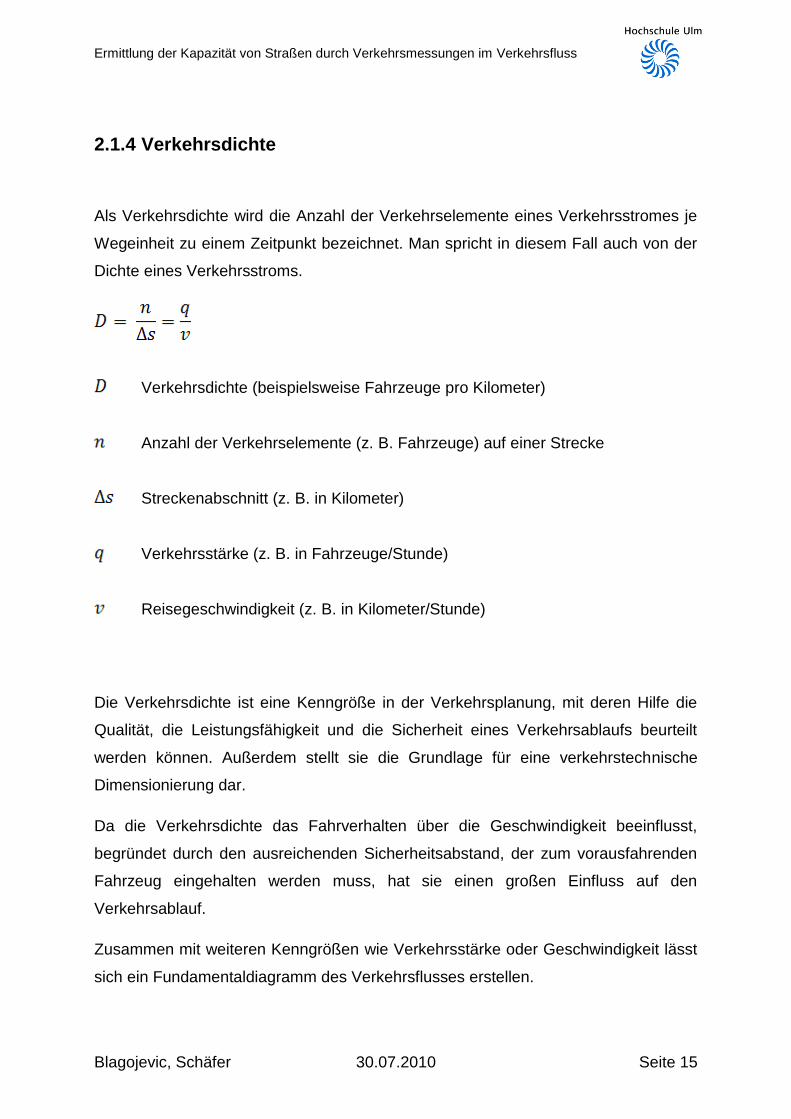
2.1.4 Verkehrsdichte
Als Verkehrsdichte wird die Anzahl der Verkehrselemente eines Verkehrsstromes je
Wegeinheit zu einem Zeitpunkt bezeichnet. Man spricht in diesem Fall auch von der
Dichte eines Verkehrsstroms.
Verkehrsdichte (beispielsweise Fahrzeuge pro Kilometer)
Anzahl der Verkehrselemente (z. B. Fahrzeuge) auf einer Strecke
Streckenabschnitt (z. B. in Kilometer)
Verkehrsstärke (z. B. in Fahrzeuge/Stunde)
Reisegeschwindigkeit (z. B. in Kilometer/Stunde)
Die Verkehrsdichte ist eine Kenngröße in der Verkehrsplanung, mit deren Hilfe die
Qualität, die Leistungsfähigkeit und die Sicherheit eines Verkehrsablaufs beurteilt
werden können. Außerdem stellt sie die Grundlage für eine verkehrstechnische
Dimensionierung dar.
Da die Verkehrsdichte das Fahrverhalten über die Geschwindigkeit beeinflusst,
begründet durch den ausreichenden Sicherheitsabstand, der zum vorausfahrenden
Fahrzeug eingehalten werden muss, hat sie einen großen Einfluss auf den
Verkehrsablauf.
Zusammen mit weiteren Kenngrößen wie Verkehrsstärke oder Geschwindigkeit lässt
sich ein Fundamentaldiagramm des Verkehrsflusses erstellen.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 16
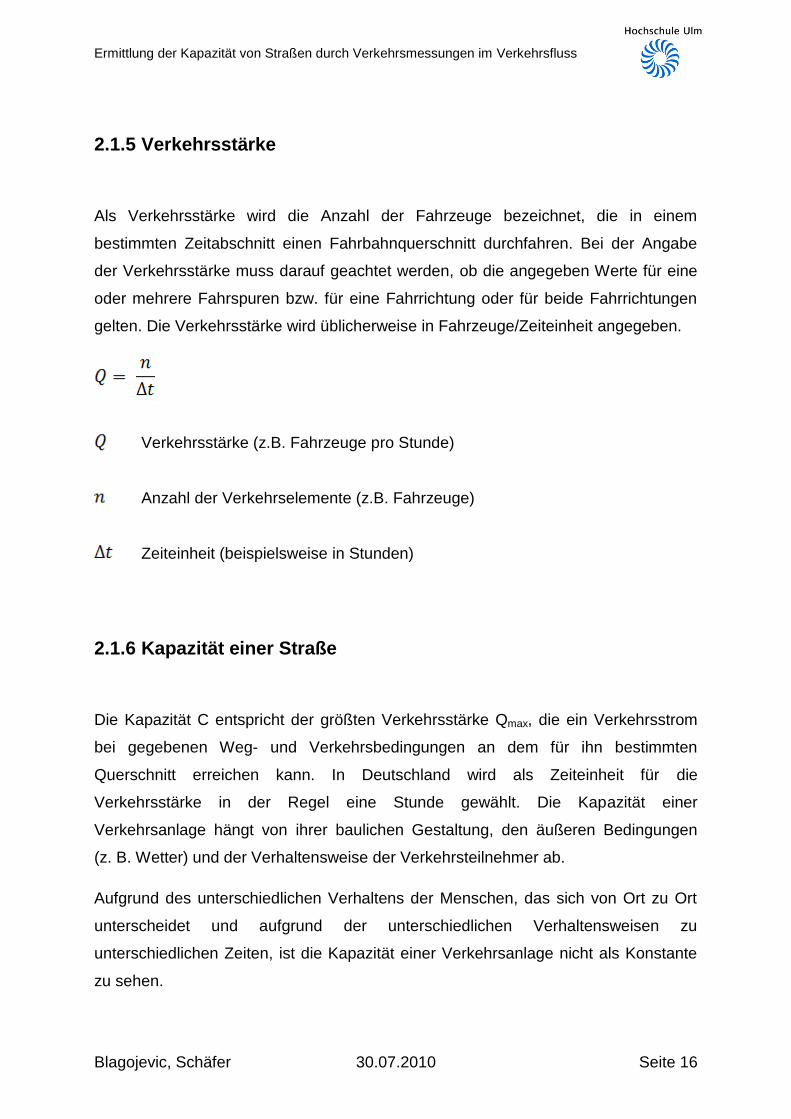
2.1.5 Verkehrsstärke
Als Verkehrsstärke wird die Anzahl der Fahrzeuge bezeichnet, die in einem
bestimmten Zeitabschnitt einen Fahrbahnquerschnitt durchfahren. Bei der Angabe
der Verkehrsstärke muss darauf geachtet werden, ob die angegeben Werte für eine
oder mehrere Fahrspuren bzw. für eine Fahrrichtung oder für beide Fahrrichtungen
gelten. Die Verkehrsstärke wird üblicherweise in Fahrzeuge/Zeiteinheit angegeben.
Verkehrsstärke (z.B. Fahrzeuge pro Stunde)
Anzahl der Verkehrselemente (z.B. Fahrzeuge)
Zeiteinheit (beispielsweise in Stunden)
2.1.6 Kapazität einer Straße
Die Kapazität C entspricht der größten Verkehrsstärke Qmax, die ein Verkehrsstrom
bei gegebenen Weg- und Verkehrsbedingungen an dem für ihn bestimmten
Querschnitt erreichen kann. In Deutschland wird als Zeiteinheit für die
Verkehrsstärke in der Regel eine Stunde gewählt. Die Kapazität einer
Verkehrsanlage hängt von ihrer baulichen Gestaltung, den äußeren Bedingungen
(z. B. Wetter) und der Verhaltensweise der Verkehrsteilnehmer ab.
Aufgrund des unterschiedlichen Verhaltens der Menschen, das sich von Ort zu Ort
unterscheidet und aufgrund der unterschiedlichen Verhaltensweisen zu
unterschiedlichen Zeiten, ist die Kapazität einer Verkehrsanlage nicht als Konstante
zu sehen.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 17
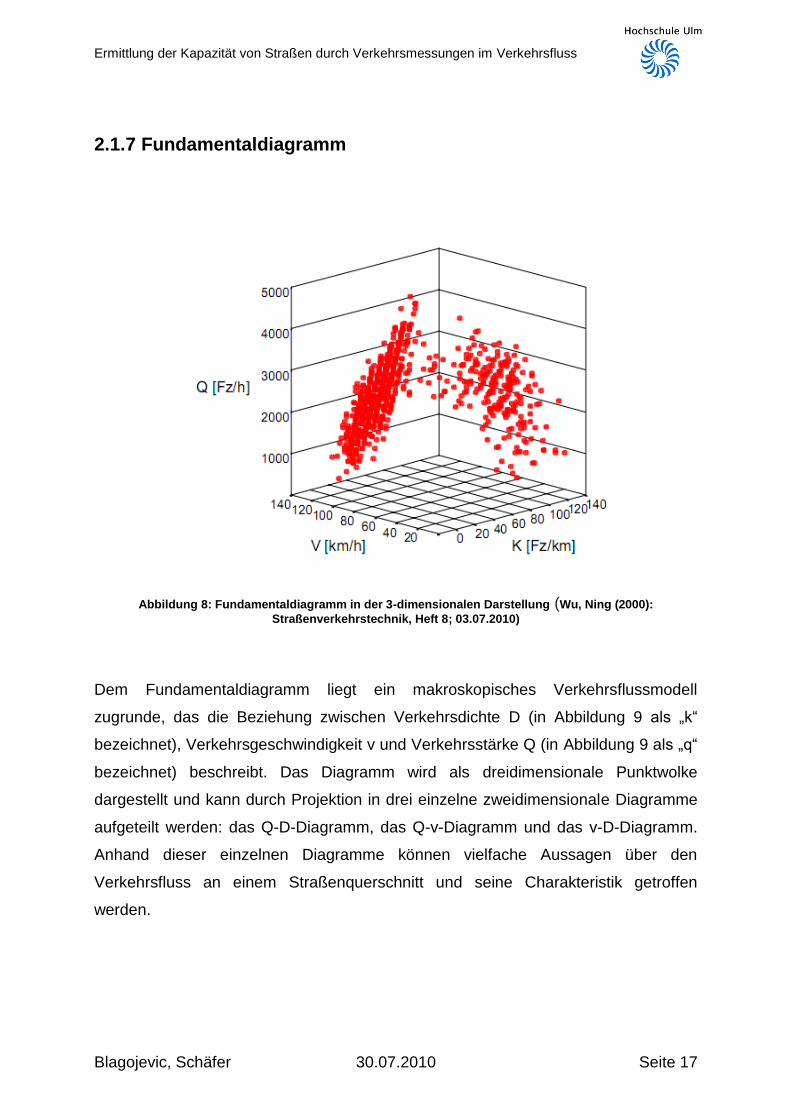
2.1.7 Fundamentaldiagramm
Abbildung 8: Fundamentaldiagramm in der 3-dimensionalen Darstellung (Wu, Ning (2000):
Straßenverkehrstechnik, Heft 8; 03.07.2010)
Dem Fundamentaldiagramm liegt ein makroskopisches Verkehrsflussmodell
zugrunde, das die Beziehung zwischen Verkehrsdichte D (in Abbildung 9 als „k“
bezeichnet), Verkehrsgeschwindigkeit v und Verkehrsstärke Q (in Abbildung 9 als „q“
bezeichnet) beschreibt. Das Diagramm wird als dreidimensionale Punktwolke
dargestellt und kann durch Projektion in drei einzelne zweidimensionale Diagramme
aufgeteilt werden: das Q-D-Diagramm, das Q-v-Diagramm und das v-D-Diagramm.
Anhand dieser einzelnen Diagramme können vielfache Aussagen über den
Verkehrsfluss an einem Straßenquerschnitt und seine Charakteristik getroffen
werden.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 18
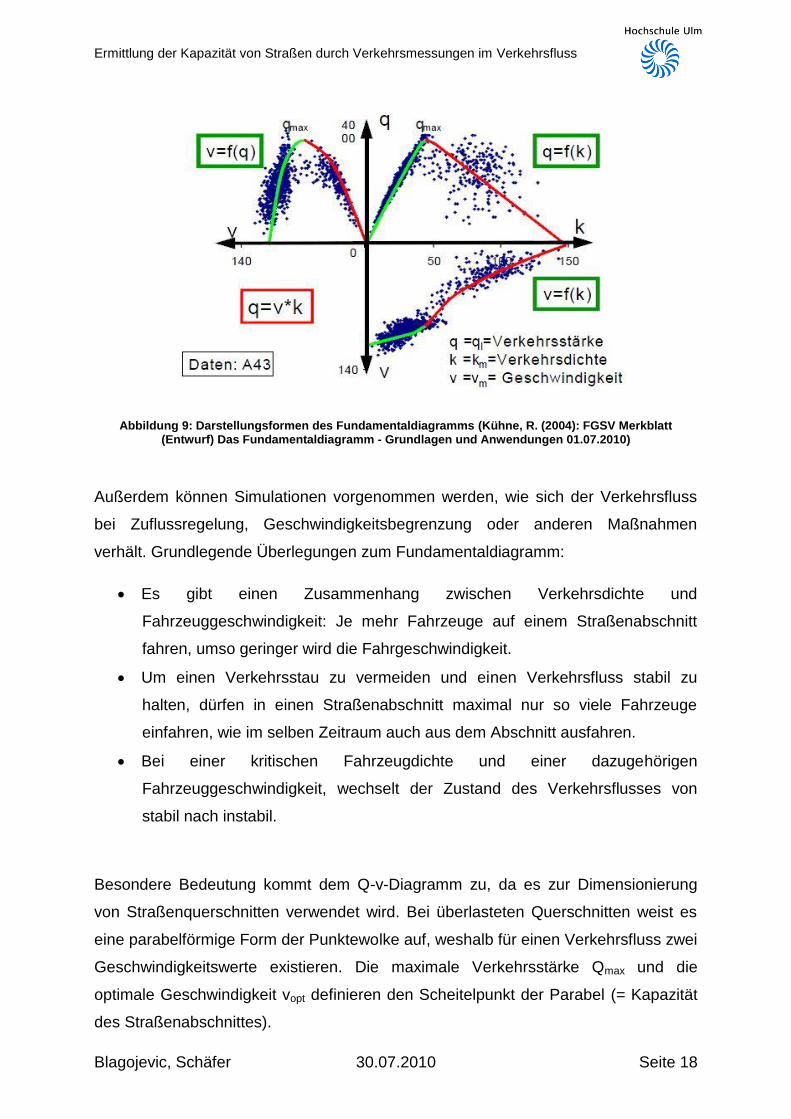
Abbildung 9: Darstellungsformen des Fundamentaldiagramms (Kühne, R. (2004): FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm - Grundlagen und Anwendungen 01.07.2010)
Außerdem können Simulationen vorgenommen werden, wie sich der Verkehrsfluss
bei Zuflussregelung, Geschwindigkeitsbegrenzung oder anderen Maßnahmen
verhält. Grundlegende Überlegungen zum Fundamentaldiagramm:
Es gibt einen Zusammenhang zwischen Verkehrsdichte und
Fahrzeuggeschwindigkeit: Je mehr Fahrzeuge auf einem Straßenabschnitt
fahren, umso geringer wird die Fahrgeschwindigkeit.
Um einen Verkehrsstau zu vermeiden und einen Verkehrsfluss stabil zu
halten, dürfen in einen Straßenabschnitt maximal nur so viele Fahrzeuge
einfahren, wie im selben Zeitraum auch aus dem Abschnitt ausfahren.
Bei einer kritischen Fahrzeugdichte und einer dazugehörigen
Fahrzeuggeschwindigkeit, wechselt der Zustand des Verkehrsflusses von
stabil nach instabil.
Besondere Bedeutung kommt dem Q-v-Diagramm zu, da es zur Dimensionierung
von Straßenquerschnitten verwendet wird. Bei überlasteten Querschnitten weist es
eine parabelförmige Form der Punktewolke auf, weshalb für einen Verkehrsfluss zwei
Geschwindigkeitswerte existieren. Die maximale Verkehrsstärke Qmax und die
optimale Geschwindigkeit vopt definieren den Scheitelpunkt der Parabel (= Kapazität
des Straßenabschnittes).
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 19
Weiterhin kann das Diagramm in zwei Bereiche eingeteilt werden: Der grüne Bereich
(vgl. Abbildung 9) markiert den Zustand, in dem freier, stabiler Verkehr herrscht,
während der rote Bereich (vgl. Abbildung 9) den zusammengebrochenen, instabilen
Verkehr darstellt. Bei einer mehrspurigen Fahrbahn liegt die optimale
Geschwindigkeit in der Regel zwischen 70 und 100 km/h.
Aus der Umrechnung mit der Fundamentalbeziehung ergibt sich das
Q-D-Diagramm das oft als das eigentliche Fundamentaldiagramm bezeichnet wird.
Wie schon das Q-v-Diagramm, kann auch das Q-D-Diagramm in einen stabilen und
einen instabilen Zustand unterteilt werden, wobei im stabilen Bereich eine dichte
Punktewolke und im instabilen Bereich eine weiter gestreute Punktewolke entlang
der Geraden verläuft.
Das v-D-Diagramm stellt schließlich die Geschwindigkeit über der Verkehrsstärke
dar. Mit steigender Geschwindigkeit fällt die Verkehrsdichte annähernd kontinuierlich
ab und so kann hier der stabile und der instabile Bereich oft nur schwer
unterschieden werden. Der abfallende Kurvenverlauf legt eine große Abhängigkeit
des Verkehrsflusses von der Verkehrsdichte nahe.
Neben der Unterscheidung in einen stabilen und einen instabilen Bereich können die
einzelnen Diagramme in weitere Zustandsformen aufgeteilt werden, worauf in Kapitel
2.1.2 näher eingegangen wird.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 20
2.1.8 Zeitlücke
Als Zeitlücke wird die Zeitspanne bezeichnet, in der zwei aufeinander folgende
Fahrzeuge eine bestimmte Stelle passieren. Dabei werden am Fahrzeug die
Messpunkte entweder an der Vorder- oder Rückseite definiert.
Für die Erfassung der Messwerte der jeweiligen Zeitspannen werden verschiedene
Techniken verwendet wie Lichtschranken, Induktionsschleifen oder Videoaufnahmen.
Alternativ kann eine einfache, aber relativ ungenaue Zeitmessung mit einer Stoppuhr
vollzogen werden.
Aus der Zeitlücke kann man auf weitere verkehrstechnische Größen wie die
Verkehrsstärke oder die Verkehrsdichte eines Straßenabschnitts schließen. Dabei
unterscheidet man die Begriffe Nettozeitlücke (siehe Abbildung 10) und
Bruttozeitlücke (siehe Abbildung 11).
Abbildung 10: Nettozeitlücke (www.wikipedia.de; 01.07.2010)
Die Nettozeitlücke definiert den zeitlichen Abstand zwischen der Rückseite eines
voranfahrenden Fahrzeuges und der Vorderseite eines nachfolgenden Fahrzeuges.
Abbildung 11: Bruttozeitlücke (www.wikipedia.de; 01.07.2010)
Die Bruttozeitlücke definiert den zeitlichen Abstand zwischen der Vorderseite eines
voranfahrenden Fahrzeuges und der Vorderseite eines nachfolgenden Fahrzeuges.
Damit ist die Bruttozeitlücke die Nettozeitlücke plus die Länge des voranfahrenden
Fahrzeugs.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 21
2.1.9 Weglücke
Als Weglücke bezeichnet man den räumlichen Abstand zwischen zwei aufeinander
folgenden Fahrzeugen. Gleich wie bei der Zeitlücke wird auch bei der Weglücke
zwischen einer Brutto- und einer Nettoraumlücke unterschieden. Die Nettoraumlücke
(Nettoweglücke) beinhaltet den räumlichen Abstand zwischen der Rückseite eines
voranfahrenden Fahrzeugs und der Vorderseite eines nachfolgenden Fahrzeugs. Bei
der Bruttoraumlücke (Bruttoweglücke) wiederum, zählt der räumliche Abstand
zwischen der Vorderseite eines voranfahrenden Fahrzeugs und der Vorderseite
eines nachfolgenden Fahrzeugs (siehe analog Netto- und Bruttozeitlücke).
2.2 Entwicklung des Fundamentaldiagramms
Schon 1935 führte Greenshields mittels fotografischer Messmethoden
Untersuchungen im Straßenverkehr durch. Ziel der Messungen war die Ermittlung
verschiedener Kenngrößen wie die Verkehrsstärke, die Verkehrsdichte und die
Geschwindigkeit. Aus diesen Beobachtungen stammen auch die ersten Ansätze zur
Beschreibung des Verkehrsflusses auf einer Schnellstraße. Nach Untersuchung der
aufgenommenen Messdaten, stellte Greenshields einen linearen Zusammenhang
zwischen Geschwindigkeit und Verkehrsdichte her, der sich im Q-v-Diagramm als
Parabel widerspiegelt (siehe Abbildung 12 Diagramm oben rechts).
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 22
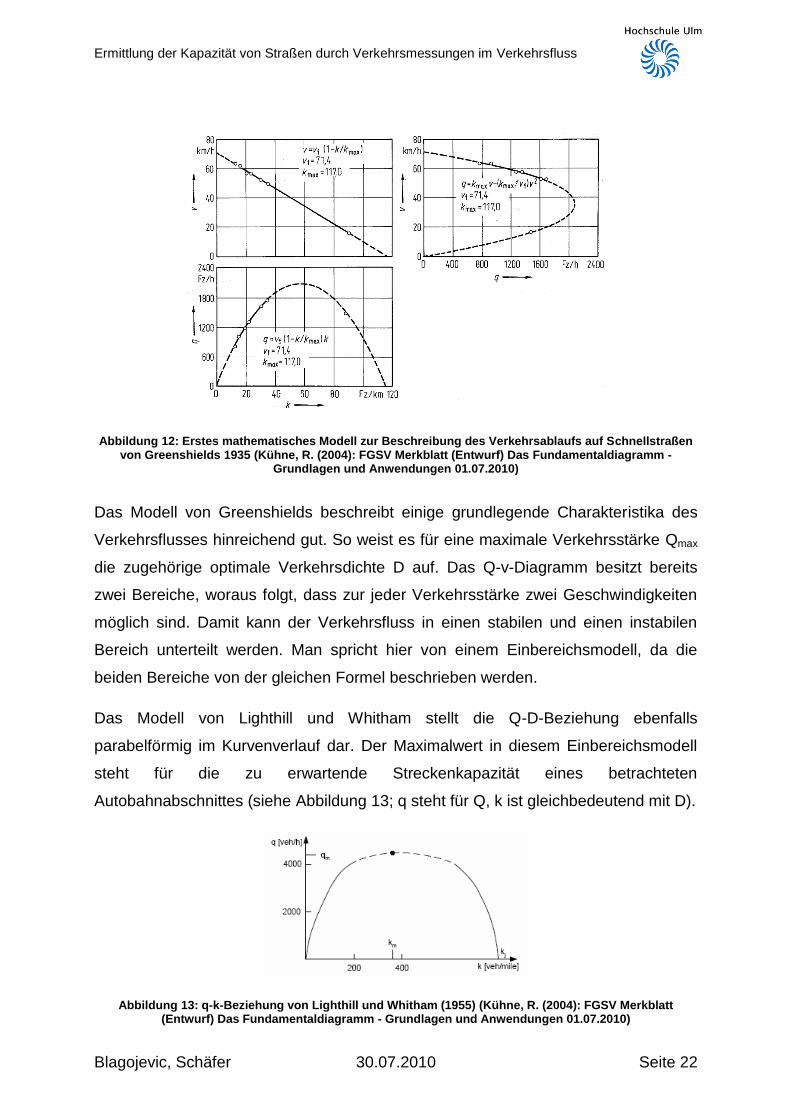
Abbildung 12: Erstes mathematisches Modell zur Beschreibung des Verkehrsablaufs auf Schnellstraßen von Greenshields 1935 (Kühne, R. (2004): FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm -
Grundlagen und Anwendungen 01.07.2010)
Das Modell von Greenshields beschreibt einige grundlegende Charakteristika des
Verkehrsflusses hinreichend gut. So weist es für eine maximale Verkehrsstärke Qmax
die zugehörige optimale Verkehrsdichte D auf. Das Q-v-Diagramm besitzt bereits
zwei Bereiche, woraus folgt, dass zur jeder Verkehrsstärke zwei Geschwindigkeiten
möglich sind. Damit kann der Verkehrsfluss in einen stabilen und einen instabilen
Bereich unterteilt werden. Man spricht hier von einem Einbereichsmodell, da die
beiden Bereiche von der gleichen Formel beschrieben werden.
Das Modell von Lighthill und Whitham stellt die Q-D-Beziehung ebenfalls
parabelförmig im Kurvenverlauf dar. Der Maximalwert in diesem Einbereichsmodell
steht für die zu erwartende Streckenkapazität eines betrachteten
Autobahnabschnittes (siehe Abbildung 13; q steht für Q, k ist gleichbedeutend mit D).
Abbildung 13: q-k-Beziehung von Lighthill und Whitham (1955) (Kühne, R. (2004): FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm - Grundlagen und Anwendungen 01.07.2010)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 23
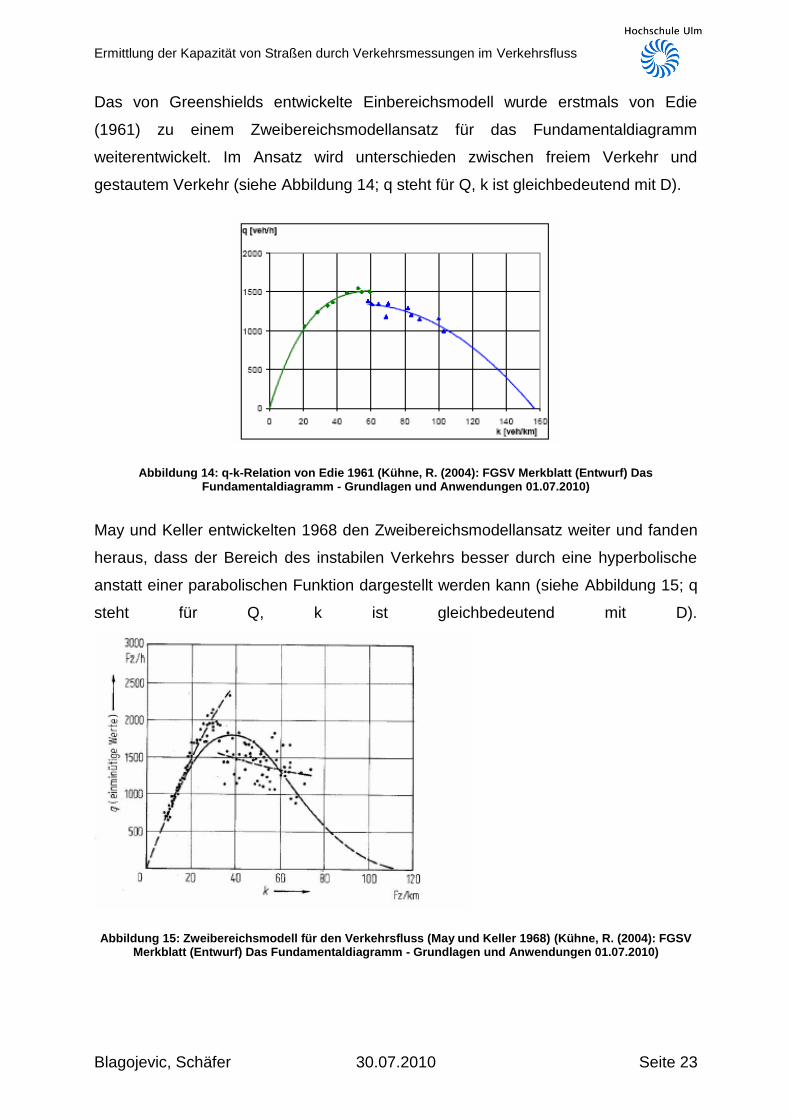
Das von Greenshields entwickelte Einbereichsmodell wurde erstmals von Edie
(1961) zu einem Zweibereichsmodellansatz für das Fundamentaldiagramm
weiterentwickelt. Im Ansatz wird unterschieden zwischen freiem Verkehr und
gestautem Verkehr (siehe Abbildung 14; q steht für Q, k ist gleichbedeutend mit D).
Abbildung 14: q-k-Relation von Edie 1961 (Kühne, R. (2004): FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm - Grundlagen und Anwendungen 01.07.2010)
May und Keller entwickelten 1968 den Zweibereichsmodellansatz weiter und fanden
heraus, dass der Bereich des instabilen Verkehrs besser durch eine hyperbolische
anstatt einer parabolischen Funktion dargestellt werden kann (siehe Abbildung 15; q
steht für Q, k ist gleichbedeutend mit D).
Abbildung 15: Zweibereichsmodell für den Verkehrsfluss (May und Keller 1968) (Kühne, R. (2004): FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm - Grundlagen und Anwendungen 01.07.2010)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 24
2.3 Messfahrt
Der praktische Teil der Studienarbeit bestand aus einer Messfahrt, die das Ziel
verfolgte, Messdaten für die Auswertung eines Autobahnabschnitts aufzunehmen.
Dazu wurde eine Messfahrt mit zwei Fahrzeugen durchgeführt. Das vordere
Fahrzeug, ein IVECO-Bus, stellte die Spitze der Fahrzeugkolonne dar, während das
zweite Fahrzeug, ein Mercedes SLK, das Ende der Fahrzeugkolonne darstellte.
Dadurch wurde eine feste Fahrzeugkolonne definiert, deren Länge sich jedoch
ständig durch die Anzahl der Fahrzeuge, die zwischen den beiden Messfahrzeugen
fuhren, veränderte. Mit Hilfe der Geschwindigkeit und des Abstands der beiden
Messfahrzeuge sowie der Anzahl der Autos zwischen diesen, sollten verschiedene
Kennwerte im Anschluss an die Messfahrt ermittelt werden, um sie dann in mehreren
Diagrammen anschaulich darzustellen. Anhand der ermittelten Kennwerte, wie z. B.
Verkehrsfluss oder Verkehrsdichte, können dann Aussagen über das
Verkehrsverhalten auf diesem Streckenabschnitt getroffen werden.
Als Teststrecke wurde ein Abschnitt der Autobahn A8 Ulm Richtung Stuttgart
gewählt. Gemessen wurde auf der Hinfahrt von der Autobahnauffahrt in Böfingen bis
zur Abfahrt in Merklingen. Auf der Rückfahrt startete die Messung bei der Auffahrt in
Merklingen und endete schließlich an der Abfahrt Ulm-Ost.
Abbildung 16: Google Earth Streckendarstellung (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 25
Die Messung wurde am Montag, den 12.04.2010, im Zeitraum von 14:00 Uhr bis
15:30 Uhr durchgeführt. Aufgrund des gewählten Datums war der Autobahnverkehr
nicht zusätzlich durch zahlreiche Pendler oder den an Freitagen üblichen
Wochenendverkehr belastet, sodass es vor allem bei der Hinfahrt schwer war,
aussagekräftige Messpunkte zu definieren.
Außerdem können die aufgenommenen Messergebnisse durch weitere
Einflussfaktoren beeinträchtigt werden. Dabei kann man diese Faktoren in folgende
Punkte unterteilen: Verkehrszusammensetzung, Abstandverhalten, Wetter- und
Lichtbedingungen, Fahrverhalten, Fahrwegeigenschaft und messtechnische
Einflussgrößen. Diese Überpunkte können wiederum in zwei Kategorien eingeordnet
werden: Äußere Einflussgrößen sowie Vorbedingungen, also nicht durch Messungen
bestimmbare Einflussgrößen. Im Folgenden sind einige Beispiele aufgelistet.
• Verkehrszusammensetzung:
- Anteil des Lkw-Verkehrs
- Fahrerpopulation (Fernverkehr, Ferienort, etc.)
• Fahrverhalten:
- Fahrgeschwindigkeit im freien Verkehrsfluss für Pkws
- Regelungen im Straßenverkehr (Rechtsfahrgebot, Rechtsüberholverbot,
Tempolimit, Überholverbot)
• Abstandverhalten (jeweils getrennt für Lkw und Pkw):
- Maximale Verkehrsdichte bei stehendem Verkehr
- Mittlerer Zeitabstand zwischen Fahrzeugen in Kolonnenfahrt
- Mittlerer Zeitabstand zwischen Fahrzeugen im Abfluss des stehenden
Verkehrs
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 26
• Fahrwegeigenschaft:
- Art der Straßen (Autobahn, Landstraße)
- Anzahl der Fahrstreifen (z. B. bei Autobahnen)
- Steigung der Straße
- Kurvigkeit (z. B. bei Landstraßen)
- Fahrstreifenbreite
• Wetter- und Lichtbedingungen:
- hell, dunkel
- trocken, nass
• Messtechnische Einflussgrößen:
- Position der Messstelle (vor, in und nach einem Engpass)
- Länge der Messintervalle (1; 5; 15 min oder 1h)
- Messverfahren
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 27
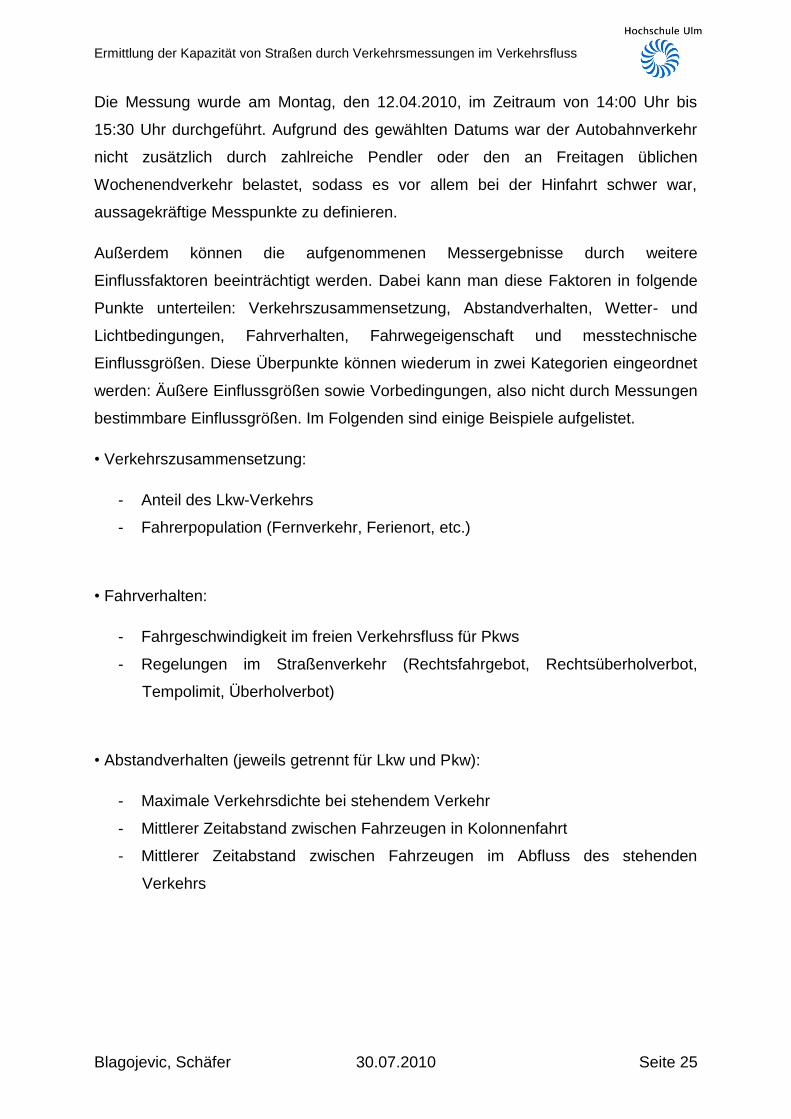
2.3.1 Fahrzeuge und Ausstattung
Als Messfahrzeuge wurden zum einen ein Mercedes SLK, ein Privatfahrzeug des
betreuenden Professors Dr. Günter Willmerding, und zum anderen ein Bus der
Hochschule Ulm, ein IVECO Daily 29L12C, eingesetzt. Während der SLK allein von
Professor Willmerding gefahren wurde, war im IVECO Bus neben den beiden
Studenten, Herr Nemanja Blagojevic und Herr Daniel Schäfer, und dem Fahrer Herr
Schmid, zusätzlich noch Frau Begelspacher zur Überwachung der Messung an Bord.
Abbildung 17: Messfahrzeug IVECO Bus (Prof. Willmerding, G., 2009: Laborversuch / Messdatenerfassung im Verkehr; 01.07.2010)
Beide Messfahrzeuge waren jeweils mit einem Laptop ausgestattet, auf dem die
nötige Messsoftware installiert war, um alle Messdaten, die über die verschiedenen
Sensoren oder per GPS empfangen wurden, zu dokumentieren.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 28
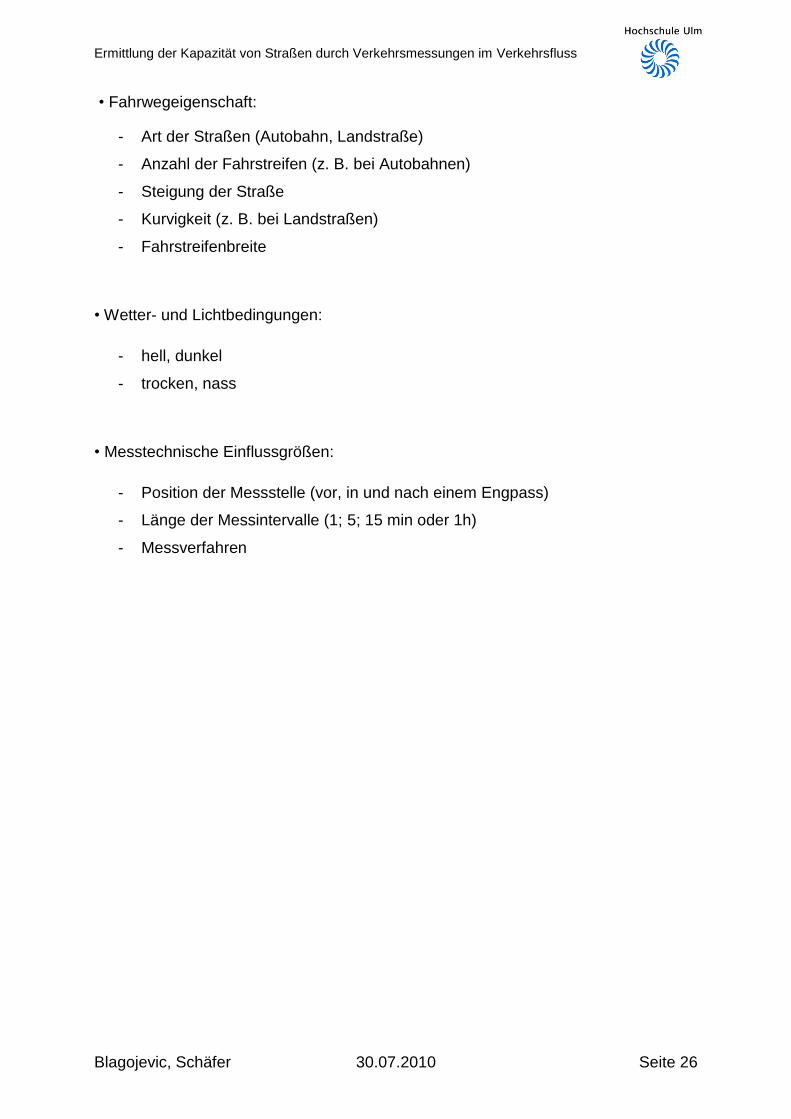
Abbildung 18: Laptop mit Sensorbox und GPS-Antenne (Prof. Willmerding, G: winADAM - Automatisierte DAtenerfassung im Mobilen Einsatz; 01.07.2010)
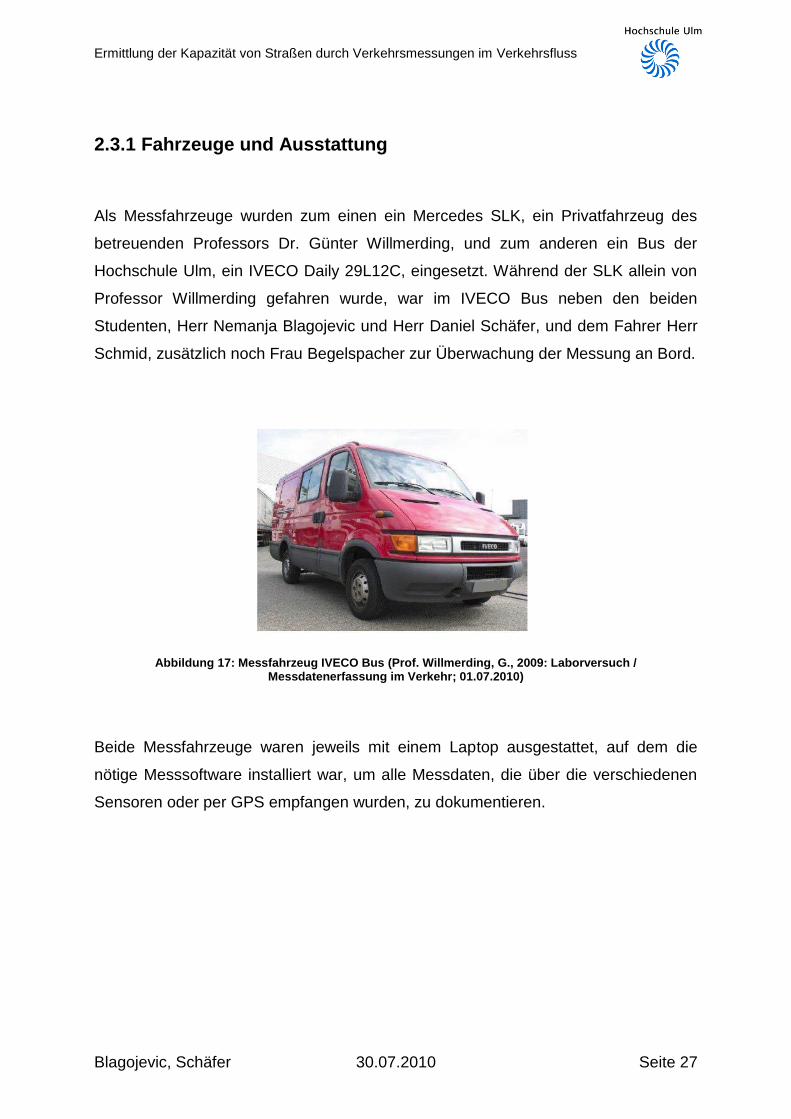
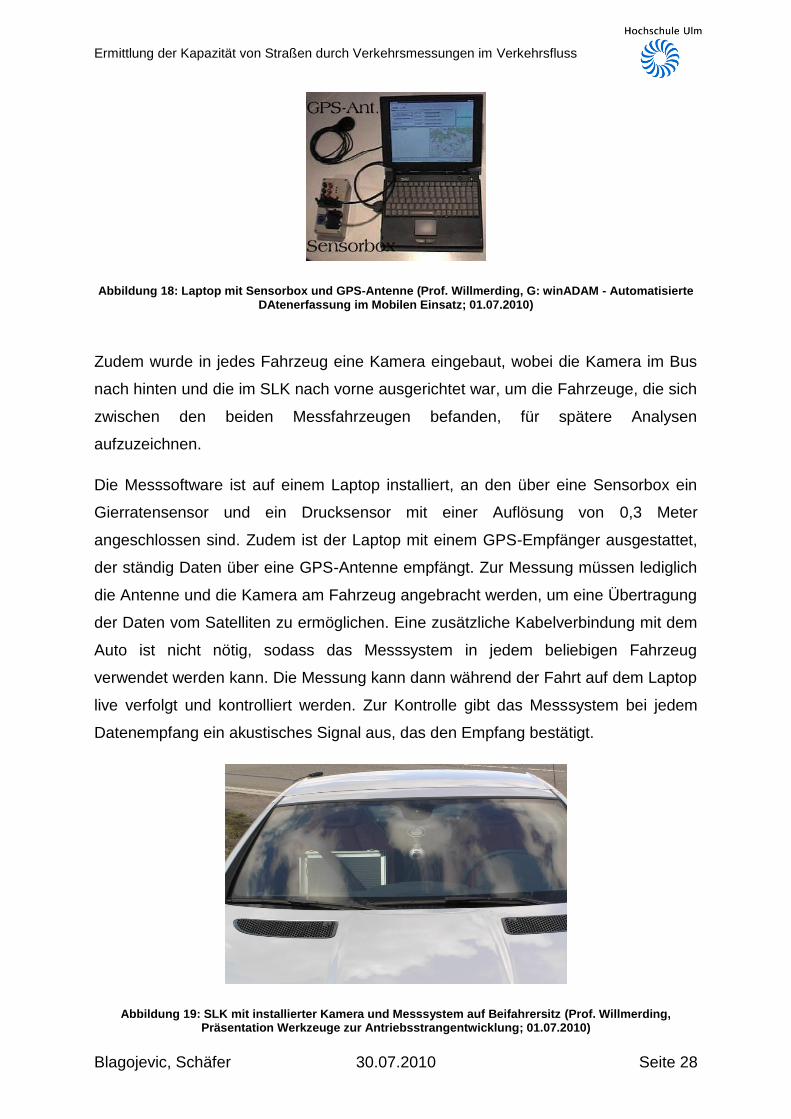
Zudem wurde in jedes Fahrzeug eine Kamera eingebaut, wobei die Kamera im Bus
nach hinten und die im SLK nach vorne ausgerichtet war, um die Fahrzeuge, die sich
zwischen den beiden Messfahrzeugen befanden, für spätere Analysen
aufzuzeichnen.
Die Messsoftware ist auf einem Laptop installiert, an den über eine Sensorbox ein
Gierratensensor und ein Drucksensor mit einer Auflösung von 0,3 Meter
angeschlossen sind. Zudem ist der Laptop mit einem GPS-Empfänger ausgestattet,
der ständig Daten über eine GPS-Antenne empfängt. Zur Messung müssen lediglich
die Antenne und die Kamera am Fahrzeug angebracht werden, um eine Übertragung
der Daten vom Satelliten zu ermöglichen. Eine zusätzliche Kabelverbindung mit dem
Auto ist nicht nötig, sodass das Messsystem in jedem beliebigen Fahrzeug
verwendet werden kann. Die Messung kann dann während der Fahrt auf dem Laptop
live verfolgt und kontrolliert werden. Zur Kontrolle gibt das Messsystem bei jedem
Datenempfang ein akustisches Signal aus, das den Empfang bestätigt.
Abbildung 19: SLK mit installierter Kamera und Messsystem auf Beifahrersitz (Prof. Willmerding, Präsentation Werkzeuge zur Antriebsstrangentwicklung; 01.07.2010)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 29
2.3.2 Messsoftware (winEVA, winADAM, winMAP)
Zur Bestimmung der aktuellen Position wurde mit dem Global Positioning System
(kurz GPS) gearbeitet. Dazu wird die aktuelle Position mit der Frequenz 1 Hz von
einem Satelliten abgefragt, der die Position, aufgeteilt in die jeweiligen x-, y- und z-
Koordinaten, dann im Bezug auf den Erdmittelpunkt liefert. Aus diesen Informationen
lassen sich somit auch die Geschwindigkeitskomponenten in die jeweilige Richtung
bestimmen. Zudem wird über das GPS noch eine fest definierte Zeit empfangen, die
es ermöglicht, einen Abgleich der Messdaten beider Fahrzeuge, bezogen auf die
GPS-Zeit, durchzuführen.
Die Verarbeitung der Signale in Messdaten erfolgte über die, speziell von der Firma
Steinbeis-TZ Verkehrstechnik (STZ-Verkehr.de) entwickelte, Software winADAM. Die
anschließende Analyse wurde dann mittels winEVA und winMAP, ebenfalls
Programme aus dem Hause STZ, vorgenommen.
winADAM ist ein Mess- und Analysesystem, das für den mobilen Einsatz in
Fahrzeugen entwickelt wurde. Daher auch der Beiname „ADAM“, der für
„Automatisierte Datenerfassung im Mobilen Einsatz“ steht.
Mit winADAM werden bei einer Messfahrt verschiedene, vordefinierte Daten
aufgenommen. So können zum Beispiel die Position des Fahrzeugs und die
Fahrgeschwindigkeit, jeweils aufgeteilt in die einzelnen Koordinaten, über die GPS-
Daten ermittelt werden. Die automatische Aufnahme der Kennwerte kann während
der Messung noch durch zusätzliche, manuelle Eingaben ergänzt werden. Dazu
wurde in der Software eine freie Spalte konfiguriert, in die live während der Messung
beliebige Werte eingetragen werden können. Im Falle der Messfahrt dieser
Studienarbeit wurde so die Anzahl der Fahrzeuge zwischen beiden Messfahrzeugen
manuell hinzugefügt.
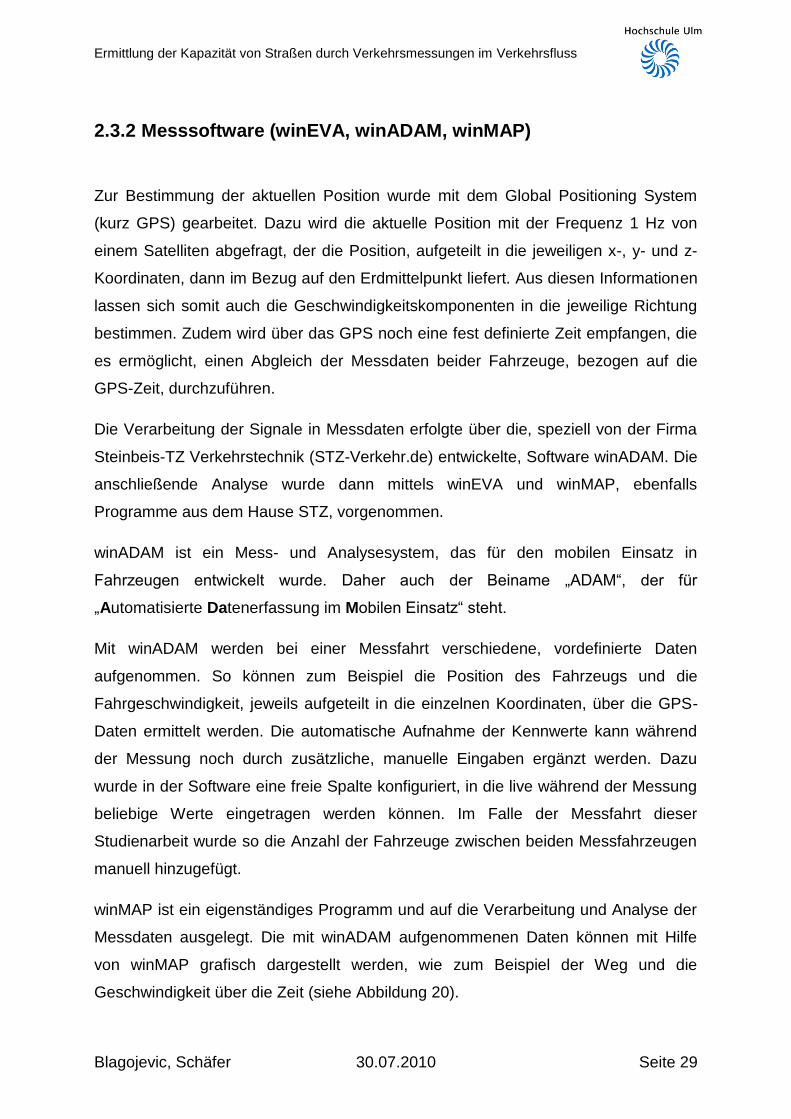
winMAP ist ein eigenständiges Programm und auf die Verarbeitung und Analyse der
Messdaten ausgelegt. Die mit winADAM aufgenommenen Daten können mit Hilfe
von winMAP grafisch dargestellt werden, wie zum Beispiel der Weg und die
Geschwindigkeit über die Zeit (siehe Abbildung 20).
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 30
Abbildung 20: WinMAP Signalverlauf (Eigenes Verzeichnis)
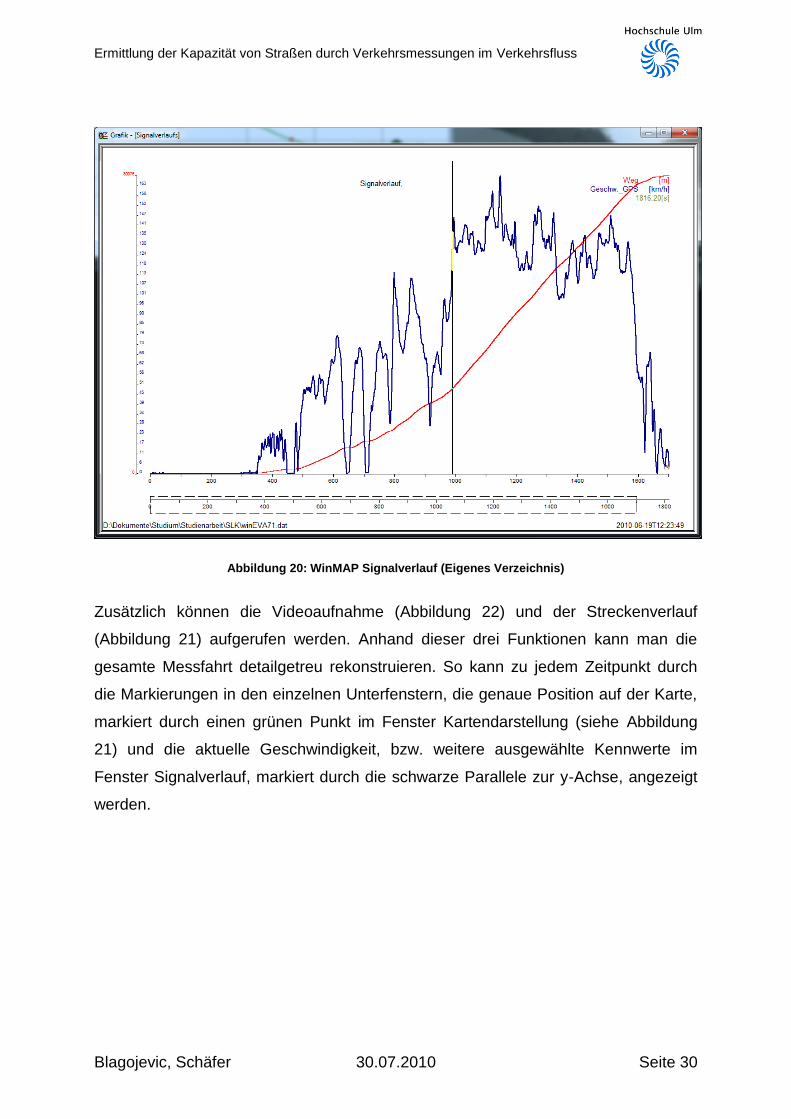
Zusätzlich können die Videoaufnahme (Abbildung 22) und der Streckenverlauf
(Abbildung 21) aufgerufen werden. Anhand dieser drei Funktionen kann man die
gesamte Messfahrt detailgetreu rekonstruieren. So kann zu jedem Zeitpunkt durch
die Markierungen in den einzelnen Unterfenstern, die genaue Position auf der Karte,
markiert durch einen grünen Punkt im Fenster Kartendarstellung (siehe Abbildung
21) und die aktuelle Geschwindigkeit, bzw. weitere ausgewählte Kennwerte im
Fenster Signalverlauf, markiert durch die schwarze Parallele zur y-Achse, angezeigt
werden.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 31
Abbildung 21: WinMAP Kartendarstellung (Eigenes Verzeichnis)
Die aktuelle Position wird zudem noch im Videofenster ständig aktualisiert, so dass
das Video immer an die richtige Stelle spult. Damit kann der Verlauf auch anhand
des gefilmten Materials nachvollzogen werden.
Abbildung 22: WinMAP Videofenster (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 32
2.3.3 Ablauf
Um möglichst viele Messpunkte während der beiden Fahrten zu erhalten, wurde
versucht, die Geschwindigkeiten der beiden Fahrzeuge möglichst gleich zu halten
und die Größe der Fahrzeugkolonne durch kurzzeitige Geschwindigkeitsver-
änderungen, zum Beispiel durch Überholen eines Fahrzeugs in der Kolonne, zu
manipulieren. Dadurch sollten aussagekräftige Messpunkte gewonnen werden, die
verschiedene Alltagssituationen simulieren.
2.3.3.1 Hinfahrt
Auf der Hinfahrt konnten einige aussagekräftige Messpunkte aufgenommen werden,
was vor allem am geringen Verkehrsaufkommen lag. Dadurch lagen die
Geschwindigkeiten zum Großteil in einem ähnlichen Bereich (∆v max. 5 km/h) und
waren damit für eine Auswertung geeignet. Allerdings änderte sich die Größe der
Fahrzeugkolonne nur selten und in einem relativ kleinen Bereich.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 33
Abbildung 23: Diagramm Hinfahrt mit Entfernung und Geschwindigkeiten beider Fahrzeuge (Eigenes Verzeichnis)
Dies führte dazu, dass zwar eine hohe Anzahl an verwertbaren Messpunkten
aufgenommen werden konnte, aber aufgrund des geringen Verkehrs keine breite
Fächerung der Werte zu erwarten war.
2.3.3.2 Rückfahrt
Das höhere Verkehrsaufkommen bei der Rückfahrt hatte zur Folge, dass ein
breiteres Spektrum an Messwerten abgedeckt werden konnte. Allerdings waren die
Geschwindigkeitsunterschiede deutlich höher, da die Fahrzeugkolonne, im Vergleich
zur Hinfahrt, größer war und sich somit auch das Fahrverhalten zwischen Anfang und
Ende der Kolonne deutlich veränderte.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 34
Abbildung 24: Diagramm Rückfahrt mit Entfernung und Geschwindigkeiten der beiden Fahrzeuge (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 35
2.4 Auswertung der Messdaten
2.4.1 Anleitung zur Verarbeitung der Messdaten
1) Öffnen der .org-Datei mit dem Windows-Editor und speichern als .txt-Datei
Abbildung 25: ungefilterte Messdaten aus .org-Datei (Eigenes Verzeichnis)
Die vom Messsystem aufgenommenen Daten müssen zur Weiterverarbeitung zuerst
umgewandelt werden. Dazu wird die .org-Datei mit dem Windows-Editor geöffnet und
anschließend in einem Textformat, beispielsweise als .txt-Datei, abgespeichert.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 36
2) Import der Daten über die Importfunktion von Microsoft Excel 2007
Abbildung 26: Textimport in Excel (Eigenes Verzeichnis)
Mit der Funktion „Externe Daten abrufen“ kann nun die umgewandelte Datei in
Microsoft Excel 2007 eingebunden werden.
3) Textkonvertierung Teil 1 von 3
Abbildung 27: Textkonvertierung 1 (Eigenes Verzeichnis)
Um die unformatierten Zahlen korrekt einzubinden, müssen verschiedene
Einstellungen vorgenommen werden. So wird zuerst der Punkt „Getrennt“
ausgewählt und mit „Weiter“ bestätigt.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 37
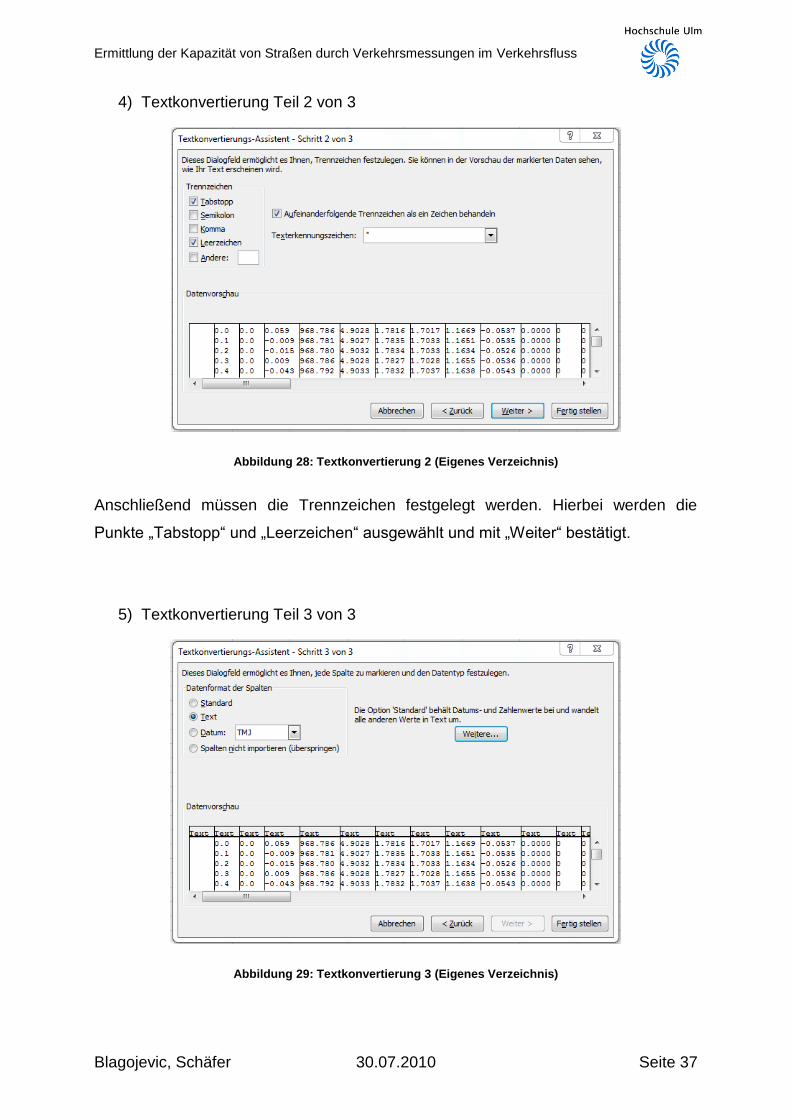
4) Textkonvertierung Teil 2 von 3
Abbildung 28: Textkonvertierung 2 (Eigenes Verzeichnis)
Anschließend müssen die Trennzeichen festgelegt werden. Hierbei werden die
Punkte „Tabstopp“ und „Leerzeichen“ ausgewählt und mit „Weiter“ bestätigt.
5) Textkonvertierung Teil 3 von 3
Abbildung 29: Textkonvertierung 3 (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 38
Zum Schluss wird das Datenformat der einzelnen Spalten definiert. Eine
Formatierung als „Text“ hat sich hierbei als praktikabel erwiesen, da damit die
weitere Bearbeitung vereinfacht wird.
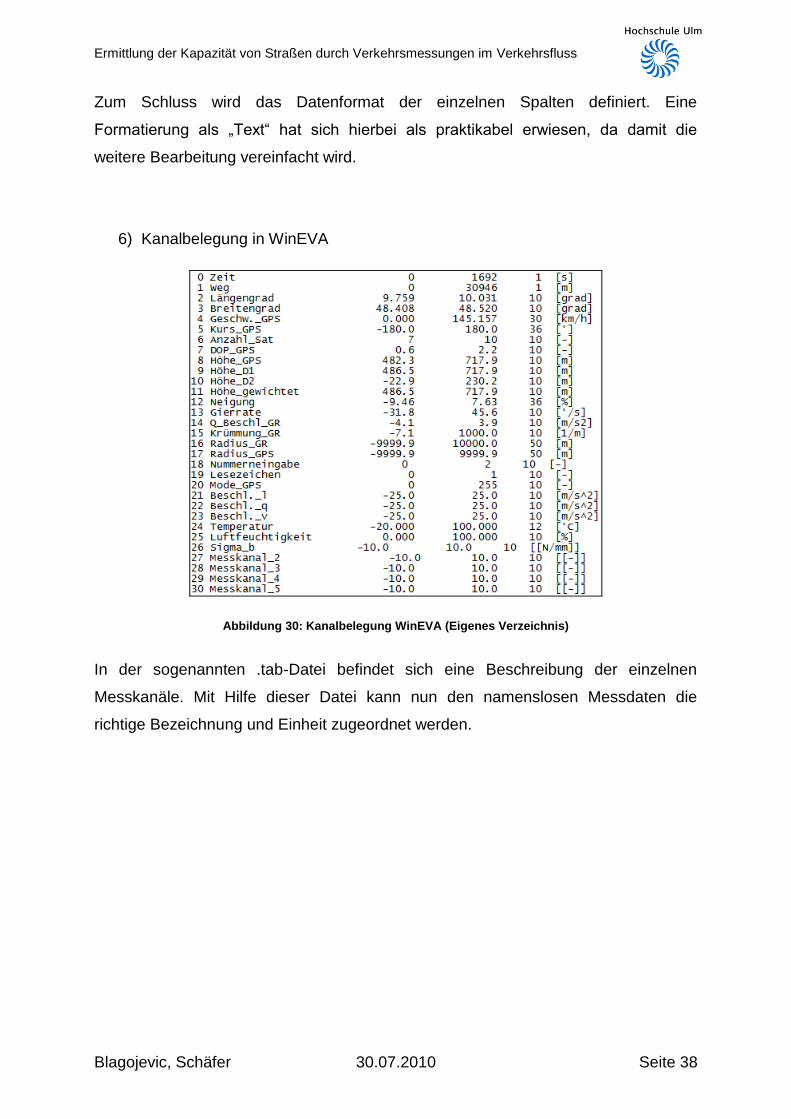
6) Kanalbelegung in WinEVA
Abbildung 30: Kanalbelegung WinEVA (Eigenes Verzeichnis)
In der sogenannten .tab-Datei befindet sich eine Beschreibung der einzelnen
Messkanäle. Mit Hilfe dieser Datei kann nun den namenslosen Messdaten die
richtige Bezeichnung und Einheit zugeordnet werden.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 39
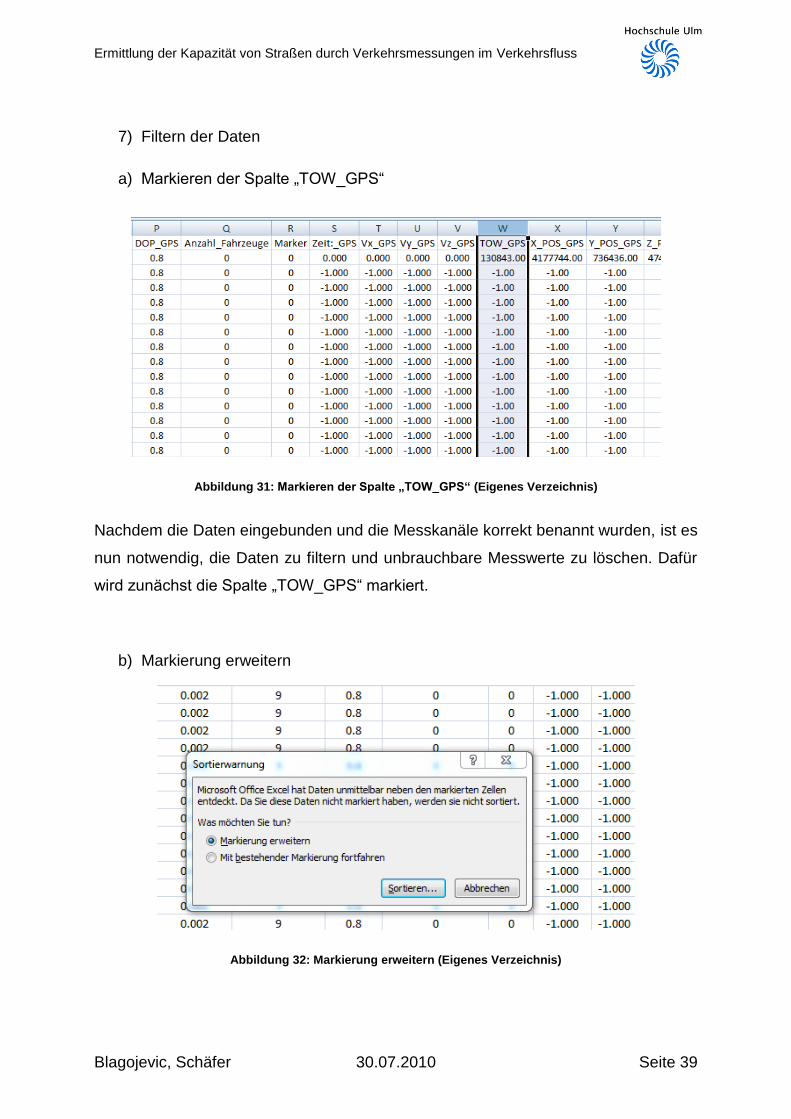
7) Filtern der Daten
a) Markieren der Spalte „TOW_GPS“
Abbildung 31: Markieren der Spalte „TOW_GPS“ (Eigenes Verzeichnis)
Nachdem die Daten eingebunden und die Messkanäle korrekt benannt wurden, ist es
nun notwendig, die Daten zu filtern und unbrauchbare Messwerte zu löschen. Dafür
wird zunächst die Spalte „TOW_GPS“ markiert.
b) Markierung erweitern
Abbildung 32: Markierung erweitern (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 40
Zum Sortieren der Daten muss im Reiter „Daten“ der Unterpunkt „Sortieren“
ausgewählt werden. Mit der Option „Markierung erweitern“ werden alle
angrenzenden Spalten in weitere Schritte mit einbezogen. Dies ist notwendig, da
sonst die Messdaten in weiteren Schritten vertauscht werden und eine korrekte
Zuordnung nicht mehr möglich ist.
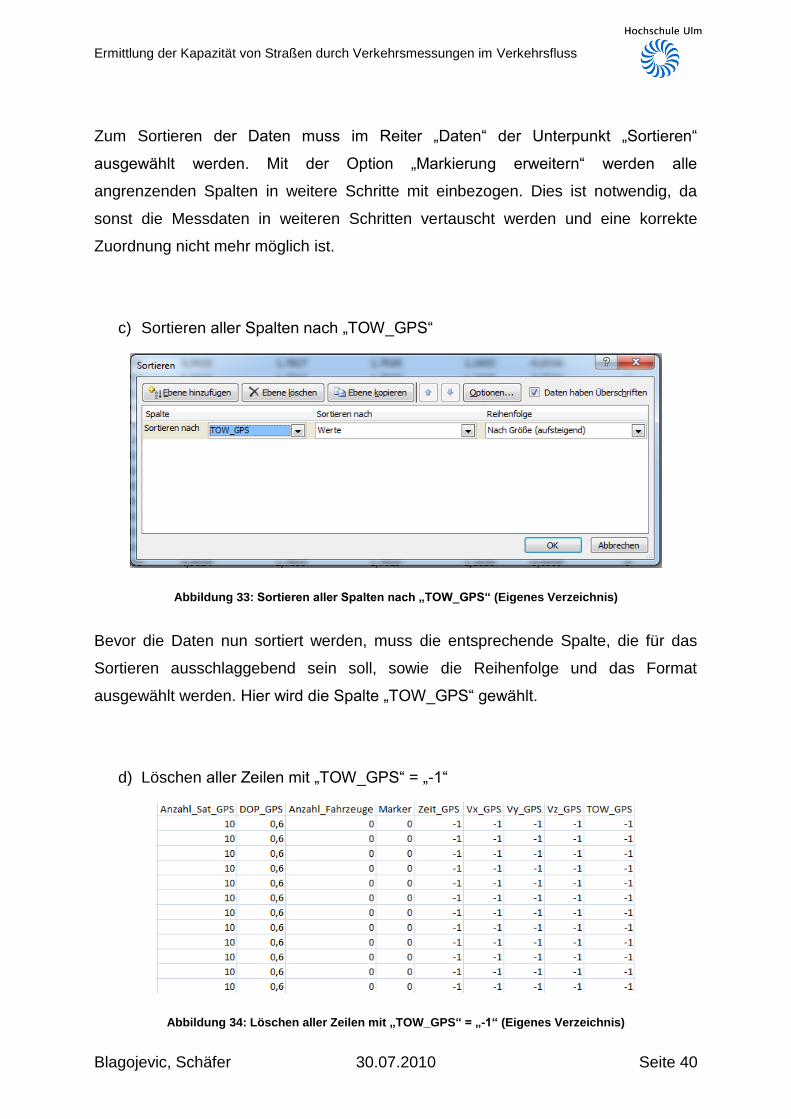
c) Sortieren aller Spalten nach „TOW_GPS“
Abbildung 33: Sortieren aller Spalten nach „TOW_GPS“ (Eigenes Verzeichnis)
Bevor die Daten nun sortiert werden, muss die entsprechende Spalte, die für das
Sortieren ausschlaggebend sein soll, sowie die Reihenfolge und das Format
ausgewählt werden. Hier wird die Spalte „TOW_GPS“ gewählt.
d) Löschen aller Zeilen mit „TOW_GPS“ = „-1“
Abbildung 34: Löschen aller Zeilen mit „TOW_GPS“ = „-1“ (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 41
Da das Messsystem mit einer höheren Frequenz Messdaten dokumentiert, als das
GPS Daten empfängt, gibt es eine Anhäufung unnötiger Messdaten, die durch den
Wert „-1“ in der Spalte „TOW_GPS“ zu erkennen sind. Durch das Sortieren nach
dieser Spalte und das anschließende Löschen der nicht benötigten Zeilen, wird die
Größe der Tabelle deutlich reduziert und eine weitere Bearbeitung vereinfacht.
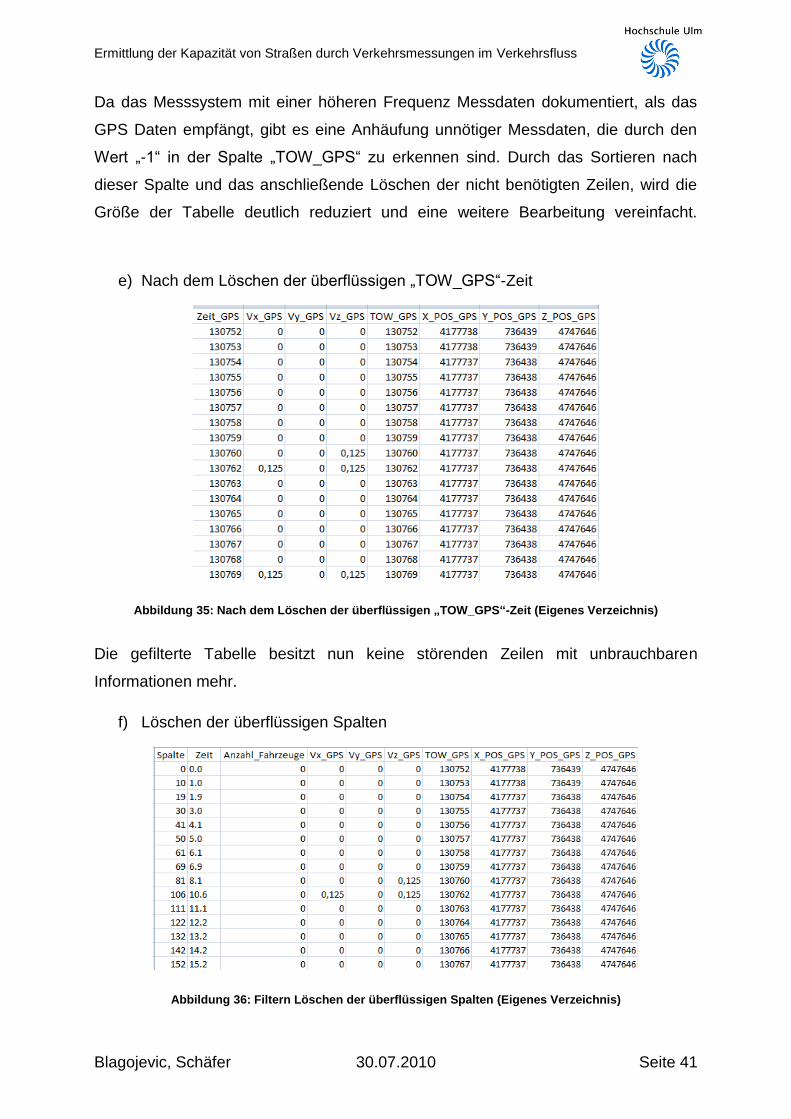
e) Nach dem Löschen der überflüssigen „TOW_GPS“-Zeit
Abbildung 35: Nach dem Löschen der überflüssigen „TOW_GPS“-Zeit (Eigenes Verzeichnis)
Die gefilterte Tabelle besitzt nun keine störenden Zeilen mit unbrauchbaren
Informationen mehr.
f) Löschen der überflüssigen Spalten
Abbildung 36: Filtern Löschen der überflüssigen Spalten (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 42
Um die Tabelle weiter zu vereinfachen, werden nun alle nicht benötigten Spalten
gelöscht. Hierzu gehören alle Spalten, die nicht für Auswertung und anschließende
Erstellung der Diagramme benötigt werden, wie z. B. die Gierrate oder der Luftdruck.
Damit wurden die Messdaten aus der .org-Datei in Microsoft Excel 2007
eingebunden und gefiltert, so dass nun mit der eigentlichen Berechnung der, für das
Fundamentaldiagramm benötigten, Werte begonnen werden kann.
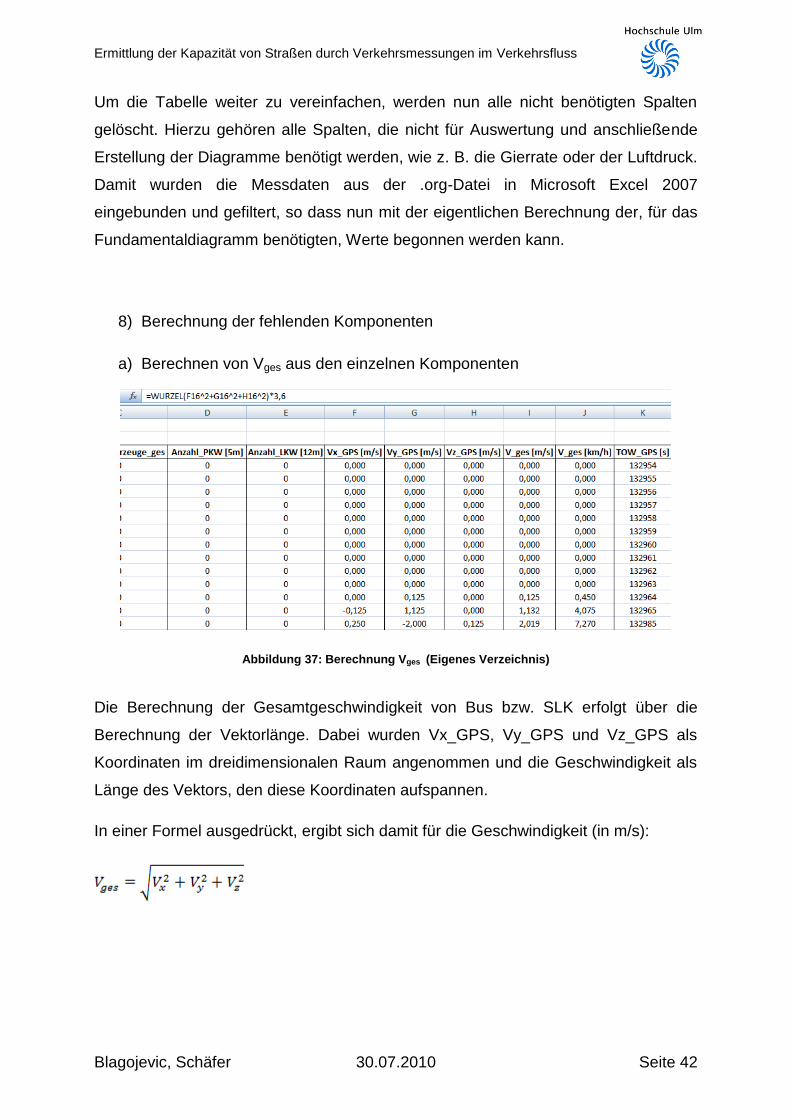
8) Berechnung der fehlenden Komponenten
a) Berechnen von Vges aus den einzelnen Komponenten
Abbildung 37: Berechnung Vges (Eigenes Verzeichnis)
Die Berechnung der Gesamtgeschwindigkeit von Bus bzw. SLK erfolgt über die
Berechnung der Vektorlänge. Dabei wurden Vx_GPS, Vy_GPS und Vz_GPS als
Koordinaten im dreidimensionalen Raum angenommen und die Geschwindigkeit als
Länge des Vektors, den diese Koordinaten aufspannen.
In einer Formel ausgedrückt, ergibt sich damit für die Geschwindigkeit (in m/s):
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 43
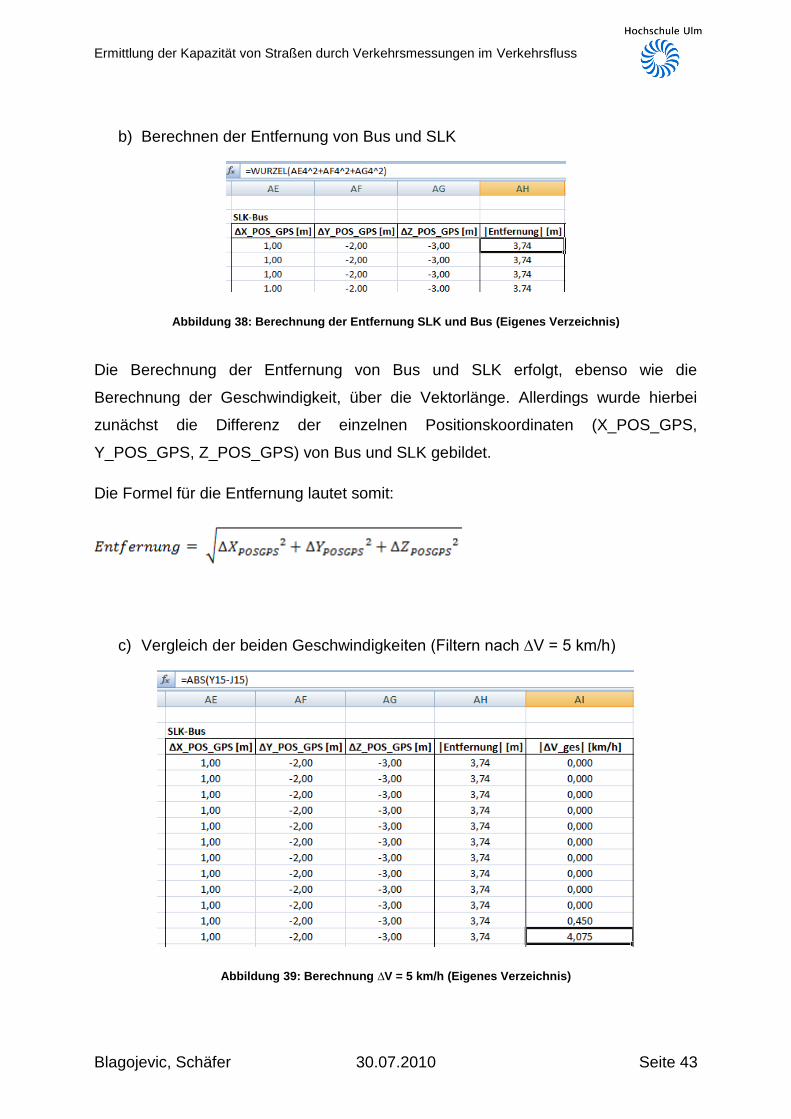
b) Berechnen der Entfernung von Bus und SLK
Abbildung 38: Berechnung der Entfernung SLK und Bus (Eigenes Verzeichnis)
Die Berechnung der Entfernung von Bus und SLK erfolgt, ebenso wie die
Berechnung der Geschwindigkeit, über die Vektorlänge. Allerdings wurde hierbei
zunächst die Differenz der einzelnen Positionskoordinaten (X_POS_GPS,
Y_POS_GPS, Z_POS_GPS) von Bus und SLK gebildet.
Die Formel für die Entfernung lautet somit:
c) Vergleich der beiden Geschwindigkeiten (Filtern nach ∆V = 5 km/h)
Abbildung 39: Berechnung ∆V = 5 km/h (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 44
Abschließend wurde die Tabelle ein weiteres Mal gefiltert, da für das
Fundamentaldiagramm möglichst stationäre Zustände benötigt werden. Hierzu diente
ein Vergleich der Geschwindigkeiten beider Fahrzeuge als Referenz. Um einen
stationären Zustand zu erhalten, wurde definiert, dass der Unterschied der beiden
Geschwindigkeiten nicht größer als 5km/h sein darf.
Dazu wurden die absolute Differenz der Geschwindigkeiten von Bus und SLK
gebildet und anschließend, wie bereits im Punkt „Filtern der Daten“ beschrieben,
über die „Sortieren“ Funktion angeordnet. Dadurch konnten alle Messpunkte, bei
denen der Geschwindigkeitsunterschied größer als 5 km/h war, gelöscht werden.
Zum Schluss wurden die Daten wieder chronologisch nach der Spalte „TOW_GPS“
angeordnet.
2.4.2 Messtabellen
Wie bereits in der grafischen Anleitung anhand von Screenshots beschrieben wurde,
mussten die aufgenommenen Messdaten sinnvoll verarbeitet werden. Dabei wurde
vor allem auf eine übersichtliche und sinnvolle Darstellung der Messwerte geachtet.
Die Ursprungsdateien, die lediglich aus einer sehr großen Menge an Zahlen
bestanden, wurden in Microsoft Excel 2007 importiert, da eine Bearbeitung dieser
Datenmenge nur mit einem geeigneten Programm möglich ist. Da für den Bus und
den SLK separat Daten aufgenommen wurden, mussten die Messdaten beider
Fahrzeuge zuerst in einer eigenen Tabelle verarbeitet werden, bevor ein Vergleich
möglich war.
Hierbei wurden die Daten zuerst nach der „TOW_GPS“-Spalte (TOW bedeutet
„Time of Week“) gefiltert. Dadurch wurden speziell die Daten des Iveco-Busses um
ein vielfaches reduziert, da die Auflösung der „TOW_GPS“-Zeit im Zehntelsekunden-
Bereich lag, während das GPS-System nur einmal pro Sekunde Daten liefert.
Durch das Filtern der einzelnen Tabellen konnten nun die Messdaten miteinander
verglichen werden, da die „TOW_GPS“-Zeit als fest definierte Größe unabhängig von
den beiden Messsystemen agiert.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 45
Im Vergleich wurden die beiden Tabellen zuerst so auf einander abgeglichen, dass
die einzelnen „TOW_GPS“-Zeiten von Bus und SLK übereinstimmen. Das Problem
hierbei war, dass das Messsystem des Busses eine größere und genauere Menge
an Messdaten lieferte als das des SLK. Dadurch gab es im Vergleich eine hohe
Anzahl an Messpunkten, bei denen die „TOW_GPS“-Zeit nicht übereinstimmte. Somit
mussten die Tabellen manuell angeglichen werden, um eine Bearbeitung möglich zu
machen.
Eine wichtige Rolle bei der Auswertung spielten die Anzahl der Fahrzeuge, die sich
zwischen den beiden Messfahrzeugen befand. Jedoch konnte die Anzahl während
der Messfahrt mit keiner großen Genauigkeit bestimmt wurden, da sowohl der teils
große Abstand, als auch die versperrte Sicht, z. B. durch große Lkw, eine Rolle
spielten. Um diesen Wert nachträglich zu integrieren, wurden die jeweiligen Videos
analysiert, die während der Fahrt aus den Fahrzeugen aufgenommen wurden.
Dazu wurden die beiden Videos synchron gestartet, um so eine möglichst hohe
Genauigkeit bei der Zählung zu erreichen. Um von der Zeit des Videos auf die
entsprechende „TOW_GPS“-Zeit zu kommen, mussten die jeweiligen Zeiten zuerst
umgerechnet werden, bevor die Daten an den richtigen Stellen ersetzt werden
konnten.
Damit konnte die Berechnung des Verkehrsflusses und der Verkehrsdichte
durchgeführt werden, ohne die nicht aussagekräftigen Zwischenschritte betrachten
zu müssen.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 46
2.5 Analyse der Fundamentaldiagramme
Nach der Auswertung der aufgenommenen Messdaten wurde im Anschluss das
Fundamentaldiagramm in seinen verschiedenen Darstellungen erstellt. Dabei wurden
die Messdaten der Hin- und Rückfahrt in einem Diagramm dargestellt, wodurch sich
die Dichte der Messpunkte und damit die Genauigkeit der Messkurve erhöhten.
Zusätzlich wurde um die Punktwolke eine theoretische Kennlinie gelegt, die als
einhüllende Linie den optimalen theoretischen Verlauf der Funktion beschreibt.
Aufgrund der geringen Messdauer bzw. der kurzen Messfahrt reicht die Anzahl der
Messpunkte bzw. der vorliegende Streubereich der Messdaten nicht aus, um eine
Kennlinie zu bestätigen. Daher wurden die theoretischen Kennlinien aus der Literatur
(siehe Abbildung 5 und folgende) übernommen und an die Messdaten angepasst.
Anhand des Verlaufs der Kennlinien ist es möglich, die folgenden Diagramme in je
drei Bereiche zu unterteilen. Die Grenzen für die jeweiligen Bereiche wurden der
Literatur entnommen.
Bereich des stabilen Verkehrsflusses: Keine Behinderung durch andere
Verkehrsteilnehmer, Wunschgeschwindigkeit und Überholmöglichkeiten sind
gegeben.
Bereich des metastabilen Verkehrsflusses: Gegenseitige Behinderung
nimmt aufgrund starkem Verkehrsaufkommen rapide zu, Wunschgeschwindig-
keit und Überholmöglichkeit nicht mehr für jeden Verkehrsteilnehmer möglich.
Bereich des instabilen Verkehrsflusses: Keine freie Geschwindigkeits-
wahl und Überholungen mehr möglich. Es kommt zur Kolonnenbildung,
welche bis zum Kolonnenstillstand führen kann. Unter instabilem Zustand
versteht man sowohl stockenden Verkehr, gestauten Verkehr als auch
stehenden Verkehr.

Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 47
Außerdem wurden die jeweiligen Kennlinien nach den Annahmen von Greenshields
hinzugefügt. Diese Kennlinien dienen zum Vergleich mit ersten Versuchen auf dem
Gebiet der Verkehrsanalyse. Die Gleichungen der Kennlinien, die aus der Literatur
übernommen wurden, sind im Folgenden aufgeführt.
freie Verkehrsgeschwindigkeit (z. B. km/h)
Stromgeschwindigkeit (z. B. km/h)
Verkehrsdichte (z. B. Fahrzeuge/km)
maximale Verkehrsdichte (z. B. Fahrzeuge/km)
Die freie Geschwindigkeit vf kann selbst gewählt werden. Für die Kennlinie wurde
eine freie Geschwindigkeit von 120 km/h gewählt und für die maximale
Verkehrsdichte Dmax der Messpunkt, mit dem größten aufgenommenen Wert für D
verwendet.
freie Verkehrsgeschwindigkeit (z. B. km/h)
Stromgeschwindigkeit (z. B. km/h)
Verkehrsdichte (z. B. Fahrzeuge/km)
maximale Verkehrsdichte (z. B. Fahrzeuge/km)
Verkehrsstärke (z. B. Fahrzeuge/h)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 48
Für die Ermittlung von Q wurden dieselben Annahmen getroffen wie bei der
Berechnung von v.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 49
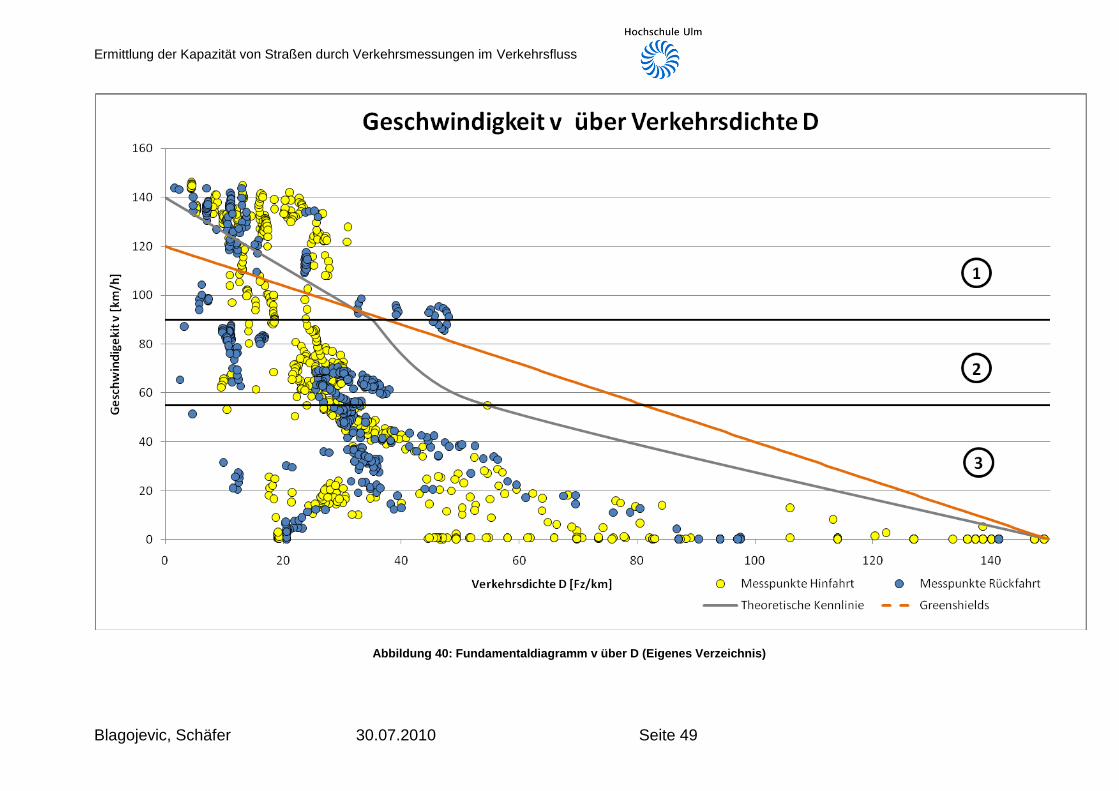
Abbildung 40: Fundamentaldiagramm v über D (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 50
Abbildung 40 stellt den Verlauf der Geschwindigkeit v über der Verkehrsdichte D dar.
Die aufgenommenen Messpunkte konzentrieren sich auf den Bereich der geringeren
Verkehrsdichte. Dies ist auf das geringe Verkehrsaufkommen während der Messfahrt
zurückzuführen. Aufgrund dieser Tatsache wurde das Diagramm um die theoretische
Kennlinie ergänzt. Dadurch kann man aus dem Diagramm rückführen, dass die
Verkehrsdichte mit steigender Geschwindigkeit abnimmt.
Charakteristisch für den stabilen Bereich sind eine hohe Geschwindigkeit und eine
geringe Verkehrsdichte. Der stabile Bereich erstreckt sich bis zu einer Verkehrsdichte
von ca. 35 Fz/km und einer Geschwindigkeit von etwa 90 km/h.
Der metastabile Bereich zeichnet sich üblicherweise durch wenige Datenpunkte aus
und ist der Übergang vom stabilen in den instabilen Verkehrsfluss. Jedoch lässt sich
dies im obigen Diagramm nicht erkennen, da dieses Phänomen nur bei Messungen
mit einer größeren Anzahl an Messdaten auftritt (Anzahl der Messpunkte n → ∞).
Allerdings ist dieser Bereich von entscheidender Wichtigkeit, da hier die maximale
Verkehrsstärke (siehe Abbildung 41) liegt. Zur Bestimmung der Kapazität einer
Straße ist Qmax ausschlaggebend.
Der instabile Bereich beginnt auf der theoretischen Kennlinie ab einer Verkehrsdichte
von etwa 55 Fz/km und einer Geschwindigkeit von 55 km/h. Die Messpunkte in
diesem Abschnitt zeichnen sich durch eine geringe Fahrgeschwindigkeit und eine
hohe Verkehrsdichte aus.
Ein Vergleich mit der Greenshields-Kennlinie zeigt, dass dieser Ansatz in der
heutigen Zeit keine praktische Anwendung findet. Erkennen lässt sich dies am
fehlenden Übergangsbereich (metastabil), da die Kennlinie linear abfällt. Eine
Untergliederung in drei Bereiche findet nicht statt, da es sich hierbei um ein
Einbereichsmodell handelt.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 51
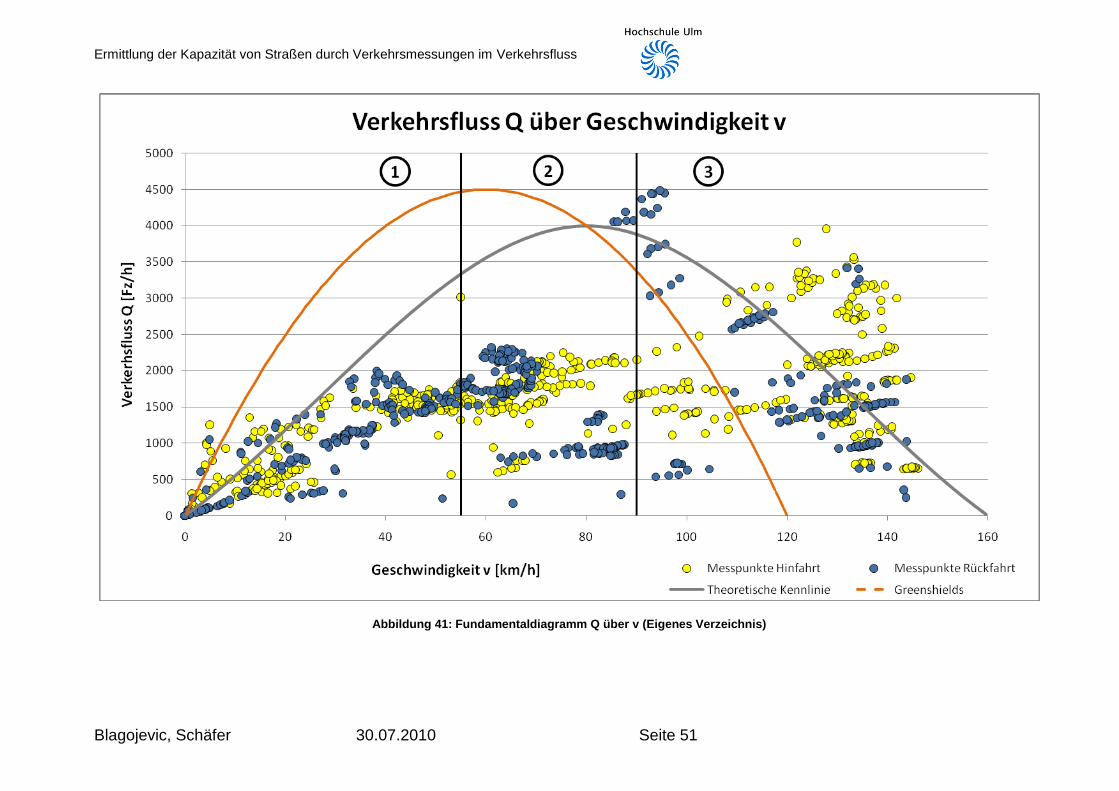
Abbildung 41: Fundamentaldiagramm Q über v (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 52
In Abbildung 41 ist der Verkehrsfluss Q über der Geschwindigkeit v dargestellt. Der
theoretische Verlauf der Kennlinie zeigt, dass der Verkehrsfluss mit steigender
Geschwindigkeit ansteigt, bis er sein Maximum erreicht hat. Danach fällt er bis auf
einen Nullpunkt ab. Die Messpunkte sind in diesem Diagramm breiter gestreut. Die
theoretische Kennlinie beschreibt hier eine parabolische Form, die zur Folge hat,
dass zu jedem Verkehrsfluss zwei Geschwindigkeiten existieren. Zudem existiert für
den maximalen Durchfluss Qmax genau eine Geschwindigkeit vopt. Das heißt es gibt
eine optimale Fahrgeschwindigkeit, bei welcher sich der größtmögliche Durchfluss (=
Kapazität C) einstellt.
Der stabile Bereich erstreckt sich hier bis zu einer Geschwindigkeit von 57 km/h und
einem Verkehrsfluss von 3300 Fz/h auf der theoretischen Kennlinie. Die
aufgenommenen Messpunkte in diesem Bereich weisen keine Auffälligkeiten auf.
Im metastabilen Bereich liegen die Messpunkte deutlich unter der theoretischen
Kennlinie und der Greenshields-Annahme. Zudem zeichnet sich hier schon eine
kleine Punktwolke (Geschwindigkeit 80-100 km/h und Verkehrsfluss 4000-4500 Fz/h)
ab, die sich deutlich von der Masse der restlichen Messpunkte absetzt.
Diese Punktwolke setzt sich bis in den instabilen Bereich fort. Dort sind die anderen
Messpunkte gleichmäßig um die theoretische Kennlinie verteilt.
Beim Vergleich der Greenshields-Kennlinie mit der theoretischen Kennlinie zeigt sich,
durch die Wahl der freien Geschwindigkeit vf = 120 km/h, für den Greenshields-
Ansatz eine Verschiebung der Kurve nach links. Die Kapazität (Qmax) der
Greenshields-Theorie liegt hier bei ca. 4500 Fz/h, also höher als die der
theoretischen Kennlinie mit 4000 Fz/h.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 53
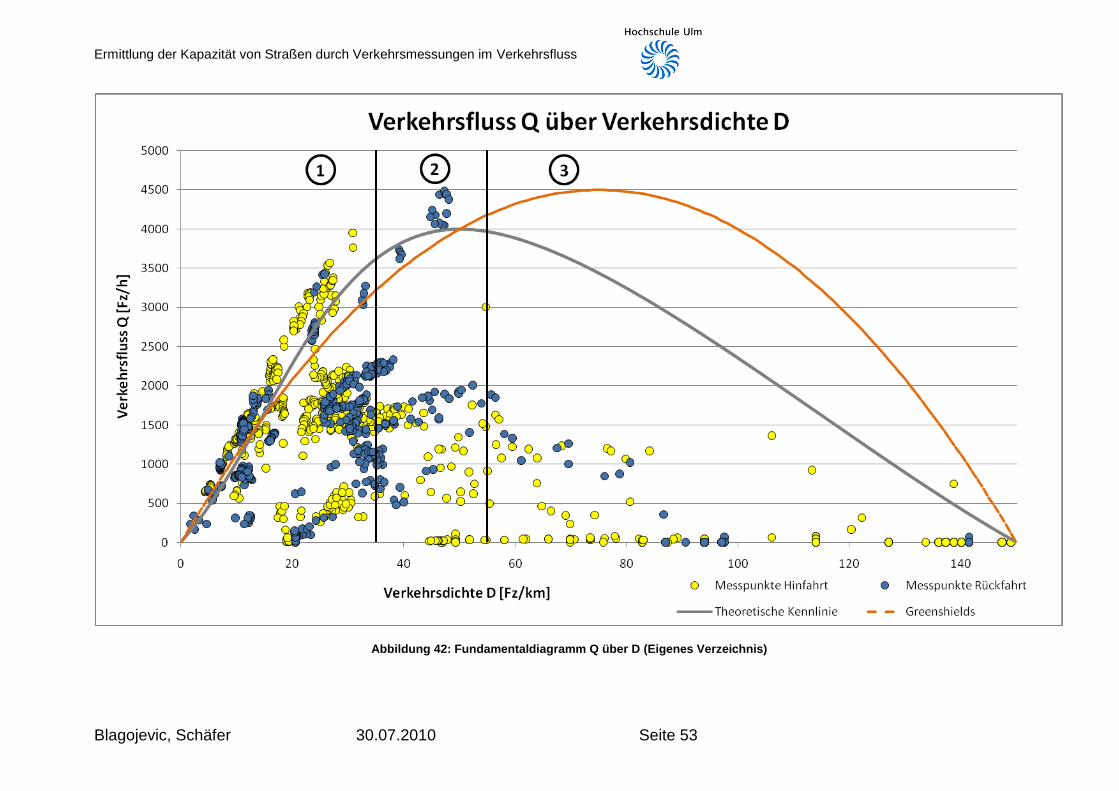
Abbildung 42: Fundamentaldiagramm Q über D (Eigenes Verzeichnis)
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 54
Das letzte Diagramm (siehe Abbildung 42) stellt den Zusammenhang zwischen
Verkehrsfluss Q und Verkehrsdichte D dar. Wie schon im Q-v-Diagramm zeigt die
theoretische Kennlinie auch hier einen parabolischen Verlauf. Jedoch steigt die
Funktion zu Beginn schneller an und fällt dann langsamer ab. Beim Betrachten der
Messpunkte fällt eine dichte Punktwolke im stabilen Bereich auf. Mit steigender
Verkehrsdichte löst sich die Wolke immer mehr auf.
Im stabilen Bereich, der bis zu einem Verkehrsfluss von 3600 Fz/h und einer
Verkehrsdichte von 37 Fz/km auf der theoretischen Kennlinie reicht, hüllt die
theoretische Kurve die Messpunkte relativ genau ein.
Der metastabile Bereich ist von einer Punktwolke mit geringem Verkehrsfluss (bis
2000 Fz/h) geprägt. Auffällig ist eine kleine, über der theoretischen Kennlinie
angesiedelte Punktwolke, die eine sehr hohe Verkehrsdichte (4000–4500 Fz/h)
aufweist.
Betrachtet man den instabilen Bereich, der einen relativ großen Umfang des
Diagramms einnimmt, so fällt dort die geringe Anzahl von Messpunkten auf. Der
Verkehrsfluss fällt von 2000 Fz/h bei ca. 55 Fz/km auf 0 Fz/h bei D = 150 Fz/km ab.
Die Greenshields-Kennlinine verläuft bei der Q-D-Darstellung parabelförmig mit den
Werten D = 0 Fz/km bis Dmax = 150 Fz/km und einem maximalen Verkehrsfluss von
Q = 4500 Fz/h.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 55
3 Zusammenfassung
Im Rahmen der Studienarbeit wurde die Kapazität C einer Straße am Beispiel des
Streckenabschnitts der Autobahn A8 Ulm Richtung Stuttgart ermittelt. Dabei wurde
während einer Messfahrt mit zwei Messfahrzeugen eine Reihe von Messdaten
aufgenommen, die dann mit Microsoft Excel 2007 verarbeitet wurde. Mit Hilfe der aus
den Messdaten erstellten Fundamentaldiagramme war es möglich, die Messfahrt aus
verkehrstechnischer Sicht zu analysieren. Dabei wurden wichtige verkehrstechnische
Faktoren wie die Verkehrsstärke bzw. der Verkehrsfluss, die Fahrgeschwindigkeit
und die Verkehrsdichte in Abhängigkeit zueinander dargestellt.
Mit den Diagrammen konnten grundsätzliche Aussagen des Fundamentaldiagramms
bestätigt werden. So konnte ein Zusammenhang zwischen Verkehrsdichte und
Verkehrsgeschwindigkeit nachgewiesen werden, der besagt, dass bei steigender
Verkehrsdichte die Fahrtgeschwindigkeit fällt. Außerdem konnte der Verkehrsfluss Q
dargestellt werden und damit auch die Kapazität der Straße, die dem maximalen
Wert von Q entspricht. Der gemessene Wert für die Kapazität der Straße lag bei etwa
4440 Fz/h. Der Wert dieser zweispurigen Straße passt in das Bild anderer, aus der
Literatur ermittelter, Werte, die eine Kapazität von etwa 1500-2000 Fahrzeugen pro
Stunde und Spur angeben.
Für zukünftige Messfahrten dieser Art lassen sich einige Verbesserungsvorschläge
machen. Dazu gehört beispielsweise die Wahl einer längeren Messstrecke. Bei der
durchgeführten Messfahrt stellte sich heraus, dass eine Gesamtstrecke (Hin- und
Rückfahrt Ulm-Merklingen) von ca. 50 km zu kurz ist, um genügend Messpunkte zur
Erstellung der Fundamentaldiagramme erfassen zu können. Dadurch wird es
schwierig, Aussagen über den wirklichen Verlauf der theoretischen Kennlinie machen
zu können, da in einigen Bereichen Messpunkte fehlen, die den Verlauf der Kennlinie
nur erahnen lassen. Ein weiterer wichtiger Aspekt zur Verbesserung zukünftiger
Messfahrten ist die Wahl eines geeigneten Zeitpunkts. Dabei ist darauf zu achten, die
Messung während einer Tageszeit mit hohem Verkehrsaufkommen zu starten. Bei
hohem Verkehrsaufkommen steigt die Anzahl der verwertbaren Messpunkte, was die
Aussagekräftigkeit der Fundamentaldiagramme stark erhöht. Betrachtet man die
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 56
verwendete Messausrüstung, so lässt sich als Verbesserungsvorschlag die
Verwendung einer höher auflösenden Kamera in beiden Fahrzeugen nennen. Je
genauer die Kamera die Messfahrt aufzeichnet, desto genauer ist eine spätere
Auswertung des Videos möglich, was wiederum die Aussagekräftigkeit der erstellten
Diagramme steigert. Außerdem könnten zukünftige Messfahrten über ständige
Kommunikation (z. B. Funksprechgeräte) zwischen beiden Fahrzeugen verbessert
werden, da durch eine Absprache zwischen den Fahrern Abstand oder aktuelle
Position geklärt werden können, was Missverständnisse bei hohem
Verkehrsaufkommen (z. B. Lkws versperren die Sicht zum anderen Messfahrzeug)
vermeiden lässt.
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 57
4 Glossar
A8 Bundesautobahn 8
D Verkehrsdichte [Fahrzeuge/Weg] (teilweise auch als k
bezeichnet)
GPS Global Positioning System
Hz Hertz (Einheit der Frequenz; 1Hz = 1s-1)
Kapazität C Kapazität = größte Verkehrsstärke, die ein Verkehrsstrom
bei gegebenen Weg- und Verkehrsbedingungen im
betrachteten Querschnitt erreichen kann
Kfz Kraftfahrzeug
Lkw/LKW Lastkraftwagen
n Anzahl der Verkehrselemente (z.B. Fahrzeuge) auf
einer Strecke
Pkw/PKW Personenkraftwagen
Q Verkehrsfluss/Verkehrsstärke [Fahrzeuge/Zeit]
(teilweise auch als q bezeichnet)
v Geschwindigkeit [km/h]
vf konstante freie Geschwindigkeit
.txt Textdatei
.tab Table file
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 58
5 Quellenverzeichnis
Internetquellen:
- Aygar, Mikail - Dynamik eines Verkehrsflusses Teil II - Mathematische Modelle
zur Beschreibung von Verkehrsflüssen (Seminar WS 07/08)
[http://www.math.tu-berlin.de/~ehrhardt/Seminar/Folien/Verkehr2.pdf
06.07.2010]
- Dr.-Ing. Zlocki, A. - Verkehrsflussoptimierung mittels Lauflicht
[http://www.ika.rwth-aachen.de/pdf_eb/gb6-05verkersflussoptimierung.pdf;
01.07.2010]
- Dr. Treiber, M./Dipl.-Phys. Kesting, A./Prof. Dr. Helbing, D. - Verkehr
verstehen und beherrschen [http://www.vwi.tu-
dresden.de/~treiber/publications/VerkehrVerstehen.pdf; 01.07.2010]
- Eberl, Jürgen - Mit High-Tech gegen den Stau - Die Kapazität der Straßen
[http://www.connect.de/themen_spezial/Die-Kapazitaet-der-
Strassen_5778971.html; 12.07.2010]
- Jelev, I. /Ding, J. - Verkehr Analyse [http://www.inf.fu-
berlin.de/lehre/SS05/Autonome_Fahrzeuge/folien.pdf; 01.07.2010]
- Schick, P. - Einfluss von Streckenbeeinflussungsanlagen auf die Kapazität von
Autobahnabschnitten sowie die Stabilität des Verkehrsflusses [http://elib.uni-
stuttgart.de/opus/volltexte/2003/1468/pdf/Dissertation_Schick.pdf; 06.07.2010]
Ermittlung der Kapazität von Straßen durch Verkehrsmessungen im Verkehrsfluss
Blagojevic, Schäfer 30.07.2010 Seite 59
- Homepage des statistischen Bundesamtes [http://www.destatis.de;
20.07.2010]
- Prof. Dr.-Ing. Brilon, W – Überlastungswahrscheinlichkeiten und
Verkehrsleistung als Bemessungskriterium von Straßenverkehrsanlagen
[http://www.vwi.tu-dresden.de/~treiber/publications/VerkehrVerstehen.pdf;
01.07.2010]
- Prof. Kühne, R. - FGSV Merkblatt (Entwurf) Das Fundamentaldiagramm -
Grundlagen und Anwendungen
[http://www.tft.pdx.edu/docs/Greenshields_Publication.pdf; 01.07.2010]
- Wu, N. - Verkehr auf Schnellstraßen im Fundamentaldiagramm - Ein neues
Modell und seine Anwendungen [http://homepage.ruhr-uni-
bochum.de/Ning.Wu/pdf/FMDG_SVT_8_2000.pdf; 15.06.2010]
- Homepage des Programms Pelops der Forschungsgesellschaft
Kraftfahrwesen mbH Aachen [http://www.pelops.de/; 02.07.2010]
Literatur:
- Künne , Hans Dieter / Steierwald, Gerd, 2005: Stadtverkehrsplanung –
Grundlagen, Methoden, Ziele. Heidelberg: Springer-Verlag
- Schnieder, Eckehard , 2007: Verkehrsleittechnik – Automatisierung des
Straßen- und Schienenverkehrs. Heidelberg: Springer-Verlag
- Prof. Willmerding, G., 2009: Laborversuch / Messdatenerfassung im Verkehr
- Prof. Willmerding, G: winADAM (Automatisierte DAtenerfassung im Mobilen
Einsatz)
Erklärung
Name: _______________________ Vorname:_______________________
Ich versichere, die Studienarbeit selbständig und lediglich unter Benutzung der
angegebenen Quellen und Hilfsmittel verfasst zu haben.
Ich erkläre weiterhin, dass die vorliegende Arbeit noch nicht im Rahmen eines
anderen Prüfungsverfahrens eingereicht wurde.
Ulm, den ______________________________
Erklärung
Name: _______________________ Vorname:_______________________
Ich versichere, die Studienarbeit selbständig und lediglich unter Benutzung der
angegebenen Quellen und Hilfsmittel verfasst zu haben.
Ich erkläre weiterhin, dass die vorliegende Arbeit noch nicht im Rahmen eines
anderen Prüfungsverfahrens eingereicht wurde.
Ulm, den ______________________________