Embed Size (px)
Citation preview

TECHNICAL REPORTS SERIES No. 297
Flow Induced Vibrations in Liquid Metal
Fast Breeder Reactors
4 ¿ W J I N T E R N A T I O N A L ATOMIC E N E R G Y A G E N C Y , V I E N N A , 1989



L

FLOW INDUCED VIBRATIONS IN LIQUID METAL FAST BREEDER REACTORS

T h e f o l l o w i n g S t a t e s a r e M e m b e r s o f t h e I n t e r n a t i o n a l A t o m i c E n e r g y A g e n c y :
A F G H A N I S T A N
A L B A N I A
A L G E R I A
A R G E N T I N A
A U S T R A L I A
A U S T R I A
B A N G L A D E S H
B E L G I U M
B O L I V I A
B R A Z I L
B U L G A R I A
B U R M A
B Y E L O R U S S I A N S O V I E T
S O C I A L I S T R E P U B L I C
C A M E R O O N
C A N A D A
C H I L E
C H I N A
C O L O M B I A
C O S T A R I C A
C O T E D ' I V O I R E
C U B A
C Y P R U S
C Z E C H O S L O V A K I A
D E M O C R A T I C K A M P U C H E A
D E M O C R A T I C P E O P L E ' S
R E P U B L I C O F K O R E A
D E N M A R K
D O M I N I C A N R E P U B L I C
E C U A D O R
E G Y P T
E L S A L V A D O R
E T H I O P I A
F I N L A N D
F R A N C E
G A B O N
G E R M A N D E M O C R A T I C R E P U B L I C
G E R M A N Y , F E D E R A L R E P U B L I C O F
G H A N A
G R E E C E
G U A T E M A L A
H A I T I
H O L Y S E E
H U N G A R Y
I C E L A N D
I N D I A
I N D O N E S I A
I R A N , I S L A M I C R E P U B L I C O F
I R A Q
I R E L A N D
I S R A E L
I T A L Y
I A M A I C A
J A P A N
J O R D A N
K E N Y A
K O R E A , R E P U B L I C O F
K U W A I T
L E B A N O N
LIBERIA
L I B Y A N A R A B J A M A H I R I Y A
L I E C H T E N S T E I N
L U X E M B O U R G
M A D A G A S C A R
M A L A Y S I A
M A L I
M A U R I T I U S
M E X I C O
M O N A C O
M O N G O L I A
M O R O C C O
N A M I B I A
N E T H E R L A N D S
N E W Z E A L A N D
N I C A R A G U A
N I G E R
N I G E R I A
N O R W A Y
P A K I S T A N
P A N A M A
P A R A G U A Y
P E R U
P H I L I P P I N E S
P O L A N D
P O R T U G A L
Q A T A R
R O M A N I A
S A U D I A R A B I A
S E N E G A L
S I E R R A L E O N E
S I N G A P O R E
S O U T H A F R I C A
S P A I N
SRI L A N K A
S U D A N
S W E D E N
S W I T Z E R L A N D
S Y R I A N A R A B R E P U B L I C
T H A I L A N D
T U N I S I A
T U R K E Y
U G A N D A
U K R A I N I A N S O V I E T S O C I A L I S T
R E P U B L I C
U N I O N O F S O V I E T S O C I A L I S T
R E P U B L I C S
U N I T E D A R A B E M I R A T E S
U N I T E D K I N G D O M O F G R E A T
B R I T A I N A N D N O R T H E R N
I R E L A N D
U N I T E D R E P U B L I C O F
T A N Z A N I A
U N I T E D S T A T E S O F A M E R I C A
U R U G U A Y
V E N E Z U E L A
V I E T N A M
Y U G O S L A V I A
Z A I R E
Z A M B I A
Z I M B A B W E
T h e A g e n c y ' s S t a t u t e w a s a p p r o v e d o n 2 3 O c t o b e r 1 9 5 6 b y t h e C o n f e r e n c e o n t h e S t a t u t e o f t h e
I A E A h e l d a t U n i t e d N a t i o n s H e a d q u a r t e r s , N e w Y o r k ; it e n t e r e d i n t o f o r c e o n 2 9 J u l y 1 9 5 7 . T h e H e a d -
q u a r t e r s o f t h e A g e n c y a r e s i t u a t e d in V i e n n a . I t s p r i n c i p a l o b j e c t i v e is " t o a c c e l e r a t e a n d e n l a r g e t h e
c o n t r i b u t i o n o f a t o m i c e n e r g y t o p e a c e , h e a l t h a n d p r o s p e r i t y t h r o u g h o u t t h e w o r l d " .
© I A E A , 1 9 8 9
P e r m i s s i o n t o r e p r o d u c e o r t r a n s l a t e t h e i n f o r m a t i o n c o n t a i n e d i n t h i s p u b l i c a t i o n m a y b e
o b t a i n e d b y w r i t i n g t o t h e I n t e r n a t i o n a l A t o m i c E n e r g y A g e n c y , W a g r a m e r s t r a s s e 5 , P . O . B o x 1 0 0 ,
A - 1 4 0 0 V i e n n a , A u s t r i a .
P r i n t e d b y t h e I A E A in A u s t r i a
M a y 1 9 8 9

TECHNICAL REPORTS SERIES No. 297
FLOW INDUCED VIBRATIONS IN LIQUID METAL
FAST BREEDER REACTORS
INTERNATIONAL ATOMIC ENERGY AGENCY VIENNA, 1989

FLOW INDUCED VIBRATIONS IN LIQUID METAL FAST BREEDER REACTORS
IAEA, VIENNA, 1989 STI/DOC/10/297
ISBN 92-0-155289-0 ISSN 0074-1914

FOREWORD
Flow induced vibrations are well known phenomena in industry. Engineers have to estimate their destructive effects on structures. In the nuclear industry, flow induced vibrations are assessed early in the design process, and the results are incor-porated in the design procedures. In many cases, model testing is used to supplement the design process to ensure that detrimental behaviour due to flow induced vibra-tions will not occur in the component in question.
While these procedures attempt to minimize the probability of adverse perfor-mance of the various components, there is a problem in the extrapolation of analyti-cal design techniques and/or model testing to actual plant operation. Therefore, sodium tests or vibrational measurements of components in the reactor system are used to provide additional assurance.
To review the state of the art in Member States in this field, the IAEA organized specialists meetings on flow induced vibrations in 1986 (Paris, France) and in 1987 (Argonne, USA).
This report is a general survey of experimental and calculational methods in this area of structural mechanics; it was written by Dr. R.J. Gibert of CEA, France. The report is addressed to specialists and institutions in industrialized and developing countries who are responsible for the design and operation of liquid metal fast breeder reactors.

L

CONTENTS
1. INTRODUCTION 1
2. SCOPE 1
3. FLUIDELASTIC PHENOMENA: GENERAL DESCRIPTION 2
3.1. General 2 3.2. Conservative fluid-structure system description 4
3.2.1. Inertial effect 5 3.2.2. Compressibility effect 6 3.2.3. Gravity effect 7
3.3. Source of excitation due to turbulent flow 8 3.3.1. General 8 3.3.2. Modal projection of source associated
with flow singularity 9 3.3.3. Probabilistic description of system excitation
and response 11 3.4. Non-conservative phenomena 13
3.4.1. Damping 13 3.4.2. Non-conservative phenomena due to permanent flow 14
4. METHODS USED FOR THE PREDICTION OF LMFBR VIBRATIONS 16
4.1. Numerical methods of computing fluid-structure interaction 16 4.1.1. Mixed displacement-pressure variable
approach description 16 4.1.2. Finite element discretization 18 4.1.3. Boundary element method ; 19 4.1.4. Substructuring techniques 20 4.1.5. Available computer codes 21
4.2. Particularities of fluid-structure systems in LMFBR reactor internal structure analysis 22 4.2.1. Thin shells coupled to small fluid sheets 23 4.2.2. 3-D aspects 26 4.2.3. Shape defects of shells 28 4.2.4. Fluid communication 31 4.2.5. Fluid free surface — gravity effects 33

4.3. Excitation source characteristics 34 4.3.1. Flow pattern description 34 4.3.2. Description of local fluctuating pressure field 35
4.4. Damping estimation 39 4.4.1. Viscosity effect 39 4.4.2. Flow-structure effect 40
4.5. An example of vibration prediction: pool-type LMFBR internal structure analysis 40 4.5.1. Modelling 40 4.5.2. 'In air' modal analysis results 44 4.5.3. Comparison with 'in air' test results 45 4.5.4. 'In sodium' modal analysis results 48 4.5.5. Calculation of response spectra 49
4.6. Weir fluidelastic instability 49 4.6.1. Modelling of overflow effects 49 4.6.2. Characteristics of the new hydroelastic system ..; 52 4.6.3. Comparison with on-site measurements 54
4.7. Specific methods for tube bundle vibration analysis 55 4.7.1. Vortex shedding and whirling instability 57 4.7.2. Non-linear interaction between tubes and tube supports ... 64 4.7.3. Wear prediction 66
4.8. Specific methods of piping analysis 66 4.8.1. Mixed displacement-pressure description 67 4.8.2. Source of excitation description 68 4.8.3. Example of piping analysis in low frequency range 72 4.8.4. Instability phenomena 72
4.9. Specific methods of pump vibration analysis 75 4.9.1. Dynamic equations of an immersed shaft 75 4.9.2. Fluid bearing calculation 77
IMPACT ON THE DESIGN 79
5.1. Reactor block vessels and baffles 79 5.1.1. Flow pattern 79 5.1.2. Structural flexibility 79
5.2. Above- and under-core structure control rods and instrumentation devices 81 5.2.1. Core support and subassembly vibration of UK CDFR ... 81 5.2.2. Above-core structure of UK CDFR 82 5.2.3. Hold Down System of Italian PEC 85 5.2.4. Core fuel elements 86 5.2.5. Instability induced by leakage flows in various
connection devices 87

5.3. IHX and SG support concept 92 5.4. Secondary circuit pipes 98 5.5. Primary and secondary pumps 100
5.5.1. Subcritical design 100 5.5.2. Hypercritical design 105
6. MEASUREMENT AND VIBRATIONAL MONITORING 106
6.1. Mock-up concept 106 6.1.1. Similitude laws 106 6.1.2. Example: mock-up concept for weir instability studies .... 109
6.2. On-site measurements 112 6.3. Data treatment 115 6.4. In-servicç vibrational diagnostics 116
7. CONCLUSIONS AND RECOMMENDATIONS 118
REFERENCES 120

L

1. INTRODUCTION
Many industrial structures are affected by flow induced vibration problems, which may manifest themselves in various ways, such as
— fluctuating stresses in materials which may induce fatigue fractures; — slidings which may induce wear phenomena leading to rupture or loss of
tightness; — shocks which may produce a local hammering of materials; — intense noise which may create environment problems.
In general, vibration phenomena are relatively weak so that it takes a long time before their destructive effects appear. Engineers have to estimate the 'life duration' of their structures.
In some special cases, however, the fluctuations due to fluidelastic instabilities are very strong and may lead to a rapid destruction of the structures. Engineers abso-lutely have to avoid such configurations and, hence, need an accurate knowledge of the instability mechanisms.
Flow induced vibrations are observed in several branches of industry: aeronau-tics, railways, petroleum industry, etc.
The nuclear industry strictly obeys safety rules, because of the great size of the structures involved and the high velocities and densities of the fluids flowing through the circuits. A specific aspect of the nuclear industry lies in the very severe requirements set up by the safety authorities. The vibration risks must then be predicted with particular care.
Liquid metal fast breeder reactors (LMFBRs) are, in this field, a typical exam-ple, because of
— the sensitivity of their structures to flow induced vibration (thin shells strongly connected to dense fluid sheets);
— the perturbed flow pattern, including relatively high velocity zones; — particular safety problems due to the presence of sodium.
For these reasons, important studies on flow induced vibration have been con-ducted for LMFBRs; they have allowed substantial progress in calculation and prediction methods and, in general, in the knowledge of this part of 'structural mechanics' [2-8].
2. SCOPE
This report puts into evidence the impact of vibration analysis on the design of the different structures of LMFBRs. 'On site' experience and vibrational monitor-ing will also be described.
1

The report addresses specialists and institutions of governmental organizations in industrialized and developing countries responsible for the design and operation of LMFBRs. It also describes the role which R&D activities play in this special field, in the framework of technology transfer. Finally, the safety aspect of flow induced vibration risk will be emphasized.
The report includes the outlines of the summary report approved by the Specialists Meeting on Flow Induced Vibrations in FBRs, held in Paris, 21 to 24 October 1986.
3. FLUIDELASTIC PHENOMENA: GENERAL DESCRIPTION
3.1. GENERAL
The flexible structures of LMFBRs are the seat of vibratory phenomena, the energy of which comes from the dense flowing fluid connected to them.
The mechanisms involved in these phenomena are very complex; in fact, the engineer who wants to calculate the motions and the stresses of the structures would have to solve the Navier-Stokes equations coupled to the structural equations. Such a calculation is, at present, not possible and, if it were, it would be too expensive.
Fortunately, depending on the type of problem, several simplifications can be made leading to easier methods of solution. The aim of this section is to present a survey of the principles of such simplifications, by discussing the different physical aspects of flow induced vibration.
Let us, first, examine the structure and the fluid separately; small motions of the structure can be described by the theory of elasticity, and the associated linear equations can be solved without any problem.
Many computer codes using the finite element method are available to deter-mine the resonance frequencies and mode shapes, or the time responses of various structures such as piping systems, plates and shells.
The greatest difficulty is the correct modelling of the boundary conditions, which, in general, have an important effect on the results. In some cases, non-linear behaviour can be noticed, as a result of imperfect contact conditions (chocks, slidings).
In other cases small motions of the structures must be considered relative to a permanent rotation or to a permanent load.
Then, special linear terms have to be added in the equations (gyroscopic terms for rotation, 'buckling' terms for a permanent load).
Such an approach is more difficult for the fluid; in fact, the permanent motion of a fluid medium is unstable (under the conditions of most industrial devices). The resulting steady state is a turbulent flow including a permanent and a complex, fluc-
2

tuating part. The characteristics of these fluctuations depend only weakly on the fluid compressibility.
Furthermore, acoustic fluctuations can be observed. These considerations lead us to distinguish three aspects of the fluid, which
may be regarded as:
(a) an acoustic medium governed by the linear wave propagation equation; (b) a medium in permanent motion (permanent mean flow); (c) a source of excitation due to turbulent or unsteady flow fluctuations.
Let us now analyse the coupled fluid-structure system.
The simplest model consists in:
— considering the conservative linear system formed by the structure coupled to the fluid acoustic medium. As we shall see in the next section, the dynamic characteristics of such a system (resonance frequencies and mode shapes) can be calculated by using computer methods.
— roughly estimating the global dissipation parameters as modal damping coefficients.
— deducing from these characteristics the transfer functions of the system. — defining the mean characteristics of the excitation source by using a stochastic
description.
The response of the fluid-structure system can easily be obtained by using the transfer functions and the source characteristics. In this representation, the sources are assumed to be independent of the response of the system.
This method works relatively well for most industrial problems although it only takes into account, essentially, two aspects (a) and (c) of the fluid.
In certain cases, aspect (b) must be considered more accurately. A possible way of doing this consists in linearizing the coupled fluid-structure equations around a simplified representation of the permanent flow pattern.
As to the structures in permanent motion, this linearization leads to extra non-conservative terms which describe the energy transfers between the flow acting as a possible source of energy and the vibrations. When the energetic balance is positive for the vibration, a 'fluidelastic' instability sets in. It is evident that the prediction of such critical configurations is the most important aim of vibration analysis.
Finally, in the most complicated case, the assumption that sources and response are independent of each other is no longer valid. Then, the three aspects of the fluid are coupled, and no simplification can be made.
In this case, only specific modelling (in general, non-linear) can be deduced from experimental analysis. Fortunately, these phenomena are relatively rare in industrial structures, and often acquiring some knowledge of their conditions of exis-tence does not require such complex non-linear analysis.
3

FIG. 1. Different aspects of flow induced vibrations.
Figure 1 summarizes the different aspects of flow induced vibrations. Let us now examine more precisely the different steps in the characterization
of flow-structure coupled systems.
3.2. CONSERVATIVE FLUID-STRUCTURE SYSTEM DESCRIPTION
In this section, we shall recall some classical notions on vibrating systems. The equation of the structure can be written as:
Kx s + Mx s = AE p (1)
where xs(F, t) is the displacement field of the structure, and К and M are its stiff-ness and mass operators, respectively. AE is a surface operator which represents the action of the fluctuation pressure field p(r,t) in the fluid medium on the wall (E) of the structure.
The equation of the fluid is the wave equation:
Ap - p = 0 (2)
4

with the wall condition
Эр = - P f v s (3)
where n is the external unit normal to Equations (1), (2) and (3) form the set of equations of the fluid-structure
system. The fluid is defined by two parameters: the density pf, which characterizes its
inertial effects, and the sound velocity c, which characterizes its compressibility effects.
To these parameters must be added the acceleration due to gravity g, which is the principal permanent loading of LMFBR structures.
Let us examine how the fluid medium modifies the dynamic behaviour of the structure.
3.2.1. Inertial effect
As will be shown in the next few paragraphs, this is the principal effect of a dense fluid.
To study the inertial effect, we may assume that the fluid is incompressible (c = 00).^
If X¡(r) is the modal basis of the structure in vacuum, the projection of Eq. (1) leads to the following diagonal system:
where m¡ and w¡ are the generalized masses and resonance frequencies, respec-tively, A is the vector of the modal components, a¡ (t), associated with the displace-ment field xs (F, t), and F is the vector of the generalized forces f¡(t) associated with the pressure field p(F, t):
A = F (4)
(5)
Let us solve the Laplace equation with the boundary condition:
Эр -- f - = -/Of Xj(r)-n on E Эп
and let pj(r) be its solution.
5

The pressure field induced by the displacement field of the structure is given by:
The effect of the fluid on the structure is then characterized by an added mass matrix. System (6) is, in general, not diagonal, and the modal basis of the system is modified.
If this modification is important, it is better to calculate directly the modes of the fluid-structure system, as we shall see in the following.
3.2.2. Compressibility effect
Each vibration analysis is carried out in a certain frequency domain of interest, corresponding to a certain range of acoustic wavelengths.
It is easy to demonstrate that the compressibility of the fluid has not to be taken into account if the shortest wavelength is long in comparison with the dimensions of the fluid volumes.
As will be seen later, the vibration sources in LMFBRs generally concern the low frequency range. Therefore, the hypothesis of incompressibility is quite justi-fied, except perhaps for the calculation of a piping system whose length reaches the order of magnitude of the acoustic wavelength.
p(r, t) = £ àj(t) p j ( r )
Then, from (5):
D âj(t) míj
System (4) now becomes:
A = 0 (6)
6

3.2.3. Gravity effect
Gravity is the permanent loading which exists in every mechanical problem. It creates a stress field in the structure and a pressure field in the fluid volumes.
The linearization around these permanent quantities leads to extra terms in the equations for the fluctuations:
— 'buckling'-type terms, which will be studied in greater detail in the next section;
— special boundary condition terms at the free surface levels (Ef) of the liquid.
The gravity effect is, in general, taken into account by writing a linear relation between the pressure and the free level displacement Z:
p = p f gZ (on Ее) (7)
We also have
Эр —- = - PfZ (on E,)
dz
so that
Эр 1 — ^ = p (on Ef) (8)
dz g
This boundary condition, which depends on the second time derivative, induces par-ticular resonance modes, 'sloshing modes', which do not require any structural motion nor any compressibility effect of the fluid.
Fourier transforming (8), we obtain, by using non-dimensional variables (L being a reference length):
Эр OJ2L Т1Г = p ( 8 a ) dz/L g
ÍF = co2L/g is the equivalent of a Froude number, which characterizes the impor-tance of gravity effects.
If ÍF « 0, Eq. (8a) can be replaced by dp/dz = 0; If $ ~ 1, we are in the first sloshing mode domain; If ÍF §> 0, Eq. (8a) can be replaced by p = 0 (i.e. gravity effects are
negligible).
7

FIG. 2. Difference in magnitude between pressure fluctuations associated with flow singulari-ties and steady turbulent level in a pipe [1].
3.3. SOURCE OF EXCITATION DUE TO TURBULENT FLOW
3.3.1. General
Turbulent flow fluctuations are sources which excite the fluid-structure cou-pled system defined in the previous section.
In an industrial circuit, certain zones are particularly perturbed, such as pipe singularities (sudden enlargements, elbows, pipe junctions) or flow behind obstacles or through tube bundles of steam generators.
Figure 2 shows the difference in magnitude between the pressure fluctuations associated with such flow singularities and the steady turbulent level in a pipe. These flow singularities are the main vibration sources of fluid-structure systems.
8

Many authors have studied the fluctuations generated by the singularities of fluid circuits. Reference [1] provides a synthesis of these works in the framework of a general theory to be summarized below.
To specify the mechanism of excitation more precisely, let us distinguish, in the Navier-Stokes equations, three different terms for the flow velocity variables:
V; = V¡ + V ¡ + V¡
permanent turbulent acoustic-mechanical part fluctuation response
and let us linearize with respect to v¡ and the pressure fluctuations p. We can show [1] that we obtain the wave propagation equation:
1 Г d2p Эр Ap-^L^ + 2ViV, r̂ + ViVjViVjP
- (VjVi) (ViVj) p j + 2p{ (ViVj) (VjV¡) (9)
= - PfViV/Vi + v¡) (Vj + vj) + дV¡VjVjVj
The symbol ~ designates the fluctuating part of the quantity written underneath. The left hand side of Eq. (9) represents the wave propagation operator includ-
ing the transport effects due to permanent flow. The right hand side of Eq. (9) is the source term associated with the perturbed
flow zone. It is also represented by
Др, - - PfV¡Vj + Vi)"(Vpr~5 + ^ViVjVjVi (10)
where pt(F, t) can be interpreted (by using Eq. (9) with с = oo) as the fluctuating pressure field in a perfectly incompressible fluid and without any wall motion.
In practice, pressure measurements in the perturbed zone of the flow singular-ity yield a good approximation for pt.
3.3.2. Modal projection of source associated with flow singularity
As we have already stated, flow induced vibration problems are, in general, low frequency problems. Therefore, the use of the modal basis of the fluid-structure coupled system is always of importance.
9

FIG. 3. Scheme of a perturbed zone in a circuit.
Let us analyse the projection of the pressure source field onto such a basis. Given a modal shape characterized by the pressure variable ir(r) (see
Section 4.1.1) and the wall displacement XS(F), the generalized force associated with the right hand side of Eq. (9) is:
The volume Vf of the perturbed zone is limited by the wall Ef and by the surface of communication S with the rest of the circuit (Fig. 3).
For the generalized force F we write:
with u>o being the resonance pulsation. Formula (11) illustrates two aspects of the excitation:
— terms 1 and 2 are 'acoustic' sources which directly excite the fluid (term 1 is small if the fluid is only weakly compressible);
— term 3 is a 'mechanical source', which excites the structure directly.
The most common assumption consists in considering the third term only:
F = — ^ r — l ртг dv — I (p, grad тг PfC J v f Pf J s
(11)
(12)
10

or, in other words, in using the local turbulent wall pressure fluctuation field on the structure as a 'forcing function'.
This assumption is valid if the fluid is only weakly compressible (as in our case) and if the characteristic length associated with the mode shape is of the order of magnitude of, or less than, the dimensions of the perturbed zone.
This last condition does not hold for the first modes of piping systems, as we shall see in Section 4.8.
3.3.3. Probabilistic description of system excitation and response
The fluctuating pressure field pt(F, t) is very complex; it is described in terms of a space-time random stationary process. For the vibration analysis, only the second order moments of the process associated with the response of the system must be known.
For a linear system, it can be demonstrated that knowledge of the cross-power density function, Sp(F, F', f), of pt is sufficient. Here, Sp (F, Г , f) is the Fourier transform of the cross-correlation function pp(F, F', т) defined by:
Pp (r, F T ) = p(F, t) p(F', t + t)
1 P -= lim —— \ p(r, t) p ( r ' , t + r) dt
T-oo 2T J_T
The power spectral density (PSD) of the response of the system at Fis given by the general formula:
SR(F, f) = [ f G(F, F0, f) G*(F, Fó, f) Sp(F0, F¿, f) dF0 dF¿ (13) J D J D
The transfer function G (F, rj), f) can be defined by using the first modes of the system:
r e ? f \ - V 1 х п ( г ) xn(rô) G(r, r0, f) - 2 J 7 1 7 7 7 ^ 7 " ( 1 4 )
nT; m n («n - o> + 2ie nww n)
(assuming a diagonal form en for the damping matrix in the modal basis).
1 1

The PSD of the response to a random fluctuating pressure field acting on E can be written by using (13) and (14):
S ( r , f )
( f E — — J E J E ~ M N M N
( г ) X J r ) X S n ( r o ) - ñ o X S n ( r ¿ ) ño S P ( F , r 0 , f )
(со2 - ш2 + 2ien«wn) - ш2 + 2Í6mwwm) da don
Neglecting in the summation the terms n m, which is valid if en, em <i lwm - wnl, we obtain:
§к(Г, f) = 2 X„(F) m n ( " n - W + 2 Í 6 n ü j o j n )
f f X S n ( r 0 ) Ho X S n ( F ¿ ) - ñ ¿ S p ( r 0 , F¿ , f ) d a 0 dffó J E J E
Лг In
J
(15)
In represents the PSD of the modal generalized force Fn(t) as defined by relation (12).
The root mean square value of оъ(г ) is approximately given by
2 / - \ X„(F) In = V . 0 2 3 (16)
The cross-spectral density Sp(F, F', f) is often represented in a simplified form (which is experimentally rather well verified):
S p ( r , F ' , f )
_ lx' - xl _ ly' - yl x' - x 2 x i f
= S p ( r , f ) e x" V t
(17)
where Xx and Xy are the correlation lengths in the curvilinear x- and y-directions and Vt is a 'transport' flow velocity (in the x-direction).
12

§р(Г, f) is the PSD of the pressure fluctuations and varies slowly with Г (com-pared with the exponential functions).
Sp is a broadband spectrum characterized by a 'cut-off frequency fc. Sp and the correlation lengths X are determined experimentally. The
experimental data can be reduced to reference permanent flow quantities as a charac-teristic flow velocity v and a characteristic length D.
The non-dimensional frequency, or Strouhal number, s, and the PSD, iF(s),
s = f ^ V
mo - (V2PfVz)z D
are, for weakly compressible and viscous flows, quasi-independent of the Reynolds number (R«. = VD/f) and the Mach number (M = V/c).
3.4. NON-CONSERVATIVE PHENOMENA
3.4.1. Damping
A structure connected to a fluid is always more strongly damped than the same structure in vacuum. The main causes of damping due to the fluid are:
— Wave radiation for systems immersed in an infinite medium. We may distin-guish acoustic radiation (associated with compressibility) and free surface radi-ation (associated with gravity). The characteristic parameter is the ratio between a wavelength and a reference dimension D of the structure: X = coD/c. The damping effect is important if X — 1.
— Viscosity can give rise to non-negligible loss of energy if the structures are con-nected to confined fluid volumes [59-61]. The non-dimensional parameter to be considered is the Stokes number:
i.e. the ratio between the viscosity and the inertial forces associated with the vibration of the fluid.
13

0.5
1.5
0 0.1 0.2 0.3 OA 05
FIG. 4. Damping coefficient versus level of vibration for a plate which vibrates in a fluid near a fixed wall [1].
— For more intense structural vibrations, some loss of energy may be due to tur-bulence phenomena. The corresponding damping effect is non-linear and increases with the level of vibration x (Fig. 4).
The relative importance between this effect and the viscosity effect is given by the parameter (ux 2 /v ) ' A .
3.4.2. Non-conservative phenomena due to permanent flow
As we have stated in the Introduction, the characteristics of the fluid-structure system may change when the fluid is flowing. To estimate the extra terms of the equation of vibrational motions due to flow (called fluidelastic terms), we may, as a possible method, linearize the Navier-Stokes equations coupled to the structure equations around the permanent velocity field V(r).
This method is applicable if the boundary layers are not specially affected by the vibration of the walls.
In this case, the permanent velocity field has only a 'transport effect' and can, in general, simply be modelled by a potential Junction.
Paidoussis [66, 72-75] and Weaver [77, 78] have done a lot of work on axial flow in cylindrical geometry; see also Ref. [76]. Formally, the formulation obtained can be generalized as follows:
The fluidelastic terms due to the permanent flow can be made explicit. If, as in Section 3.2.1, we use the modal basis of the structure in vacuum, Eq. (6) becomes:
14

N 1 m i + m f
_ \ inertial
V . A + 2 [mí] — A +
D
velocity composition
N П1;С0;
N
+ m D
A = 0
quasi-static
(18)
where V is the permanent reference flow velocity, D is the dimension of reference, and m f, rrif, and m" are the fluid mass matrices depending on the shape of the den-sity and velocity fields.
If со is a characteristic pulsation of the vibrational motions (for example, a resonance pulsation of the coupled system), Eq. (18) is governed by two non-dimensional parameters:
VR =
Pr = —
coD
mf
m + mf
reduced velocity
= ratio between equivalent fluid mass and equivalent total mass
If we add to (18) a damping term which represents the entire dissipation effects in the fluid-structure system (friction, viscosity, radiation, etc.), we obtain a third parameter: the reduced damping e.
As we shall see later, this potential model can explain a large class of phenomena and can be used to predict some fluidelastic instabilities. Unfortunately, an understanding of the behaviour of certain fluidelastic systems needs more com-plex models. In particular, certain flow configurations are sensitive to wall vibrations located in a particular range of frequencies (an example would be tubes in cross-flow; see Section 4.7). This phenomenon cannot be explained by the potential model. In fact, a detailed flow modelling would require the solution of the complex problem of the calculation of real flows which we mentioned in Section 3.1.
In practice, more global models adjusted to the experimental data are sufficient for predictions to be made.
15

4. METHODS USED FOR THE PREDICTION OF LMFBR VIBRATIONS
So far, we have shown that the first step of a flow induced vibration analysis consists in determining the characteristics of the linear system associated with the structure coupled to the fluid. This step is generally carried out by using general computer codes with a special module devoted to fluid-structure interaction.
Let us now describe the principles governing such modules.
4.1. NUMERICAL METHODS OF COMPUTING FLUID-STRUCTURE INTERACTION
Two types of methods are used in the computer codes. In the first type, fluid motions are represented by displacement variables. The
advantage is that one has a coherent description for structure and fluid. The mass operator of the system is simply multiplicative and can easily be represented by a diagonal matrix which allows the use of explicit time integration algorithms.
This kind of method is well adapted to the calculation of strongly non-linear transients.
In the second type, the fluid motions are represented by pressure variables. The advantage is that one has a scalar description which leads to a reduced number of fluid variables and avoids, in the linear case, numerical difficulties due to some singular, non-physical solutions associated with the displacement variable description.
This kind of method is well adapted to our problem. In particular, the differen-tial character of both the stiffness and mass operators of the system imposes the use of implicit integration algorithms.
This is not a problem because, anyway, implicit integration is needed for low frequency analysis or modal analysis.
This type of method is often called the acoustic method.
4.1.1. Mixed displacement-pressure variable approach description
The equations of the fluid-structure system have been written in Section 3.2 (Eqs (1), (2) and (3)).
The numerical methods are, in general, based on a variational approach to the problem, which requires an explicit representation of the variational quadratic form associated with the set of equations (1), (2) and (3).
To construct this variational form, we first consider the equations of the struc-ture and the fluid separately.
16

Structure. The variational form associated with Eq. (1) is written (in the со Fourier domain) as
= 7 ( a <g) ? d v [ ps I xs 12 dv - f p v i i d a (19) 2 Jv s 2 J v JE
The first term represents the strain potential of the structure, the second term is its kinetic energy, and the third term is the energy associated with the external pressure field acting on E.
Fluid. The variational form associated with Eqs (2) and (3) is given by
£ f = — I —Ц- p2 dv Ц- i — I grad p 12 dv + I p xs • n d<7 2 J V f p,c 2co Jv , Pf J e
(20)
The first term represents the compressibility potential of the fluid, the second term its kinetic energy and the third term the energy associated with boundary condi-tion (3).
The general variational form of the coupled problem is deduced from expres-sions (19) and (20) by identifying the coupling term:
j p x s -n da
Hence,
JE = — f a <g> ?.dv - — f Д г - p2 dv - — f P s I x s l 2 dv 2 Jv , 2 J V f P(C 2 J v / S
+ — T \ — l g r a d p l 2 d v - I p x s - n d f f (21) ~ f - I grad p 12 dv - ( Jv f Pf J e
To obtain a classical symmetric form for <£, i.e. £ = £ ) - w2£2> an extra pres-sure variable x is needed:
x = - p/w2 (22)
17

Then, the variational form of the problem becomes:
£ = — a ® ? d v + — 2 к 2 J
e dv + — I p¿ dv 2 -lvs
4 \ P s I xs 12 dv f - I grad ir 12 dv 2 J vs 2 J Vf Pi
I —Ц- pir dv - l 7Г x s -n J Vf PfC J E
da (23)
It is easy to verify that the minimization of (23) leads to the set of equations (1), (2), (3) and (22).
The gravity effect on a free surface Ef can be taken into account by adding a special form in the expression for £ :
Is* pfgz da + 2or \ ttz da (24)
We verify that the minimization of £ + £ f leads to Eq. (7) and Eq. (3) on Le.
4.1.2. Finite element discretization
The finite element method consists in finding an approximate expression for (23) depending on a finite number of nodal variables (vector (xs, p, 7г)), using test functions in the elements.
The minimization of this approximate expression leads to a matrix expression for the fluid-structure problem:
К 0 0 M 0 -MST
0 Kf 0 - CO2 0 0 - K f
0 0 0 - M s - K J - M L
3C ~v— arc
= о
(25)
18

Here, JC and 311 are the structural stiffness and mass matrices, Kf is the compressi-bility matrix of the fluid, and ML and M s describe the inertial effect of the fluid.
The matrix system (24) can be solved to provide the fluid-structure coupled natural modes.
Time history solutions with 3Cx + Sftlx = 3 can also be performed. The mixed formulation has been introduced by several authors [1, 25, 27, 47].
To simplify the mathematical expressions, sloshing is not included in this section; it was introduced by several authors [26, 32, 45, 46]. Important applications are also to be found in Refs [28, 31, 35].
4.1.3. Boundary element method
Another method of computing the fluid-structure interaction consists in using the integral expression associated with Eqs (2) and (3). In the Fourier domain, we have:
2тгр(М) - f p(P) grad [h(r)]-np dap
ИЕ-М] = - I PfO) h(r) xs(P) • ñp dop (26)
e±iwr/c where h(r) = (Fig. 5). .
r
— — M —
Fluid domain (V r)
FIG. 5. Geometry of fluid domain.
Equation (26), coupled to Eq. (1), describes the fluid-structure system and can be discretized.
The advantage of the boundary element method is that it avoids the discretiza-tion of the fluid volume Vf and, therefore, the number of degrees of freedom (DOF) can be reduced substantially.
19

This method is of particular interest in the case of a structure immersed in an infinite fluid medium. In this case, the condition of non-reflection of waves is taken into account by choosing h(r) = exp ( — icor/c).
For very close fluid volumes (such as thin fluid sheets connected to shells), the boundary element method is of no interest compared to the finite element approach because it tends to destroy the diagonal nature of the matrices without significantly reducing the number of DOFs.
In the case of a radiation boundary condition, we have a complex dependence of the coefficients on ы which characterizes a non-conservative effect, except if the fluid is incompressible. In this last case the solution of (26) (with h(r) = 1/r) leads to an added mass matrix which operates on the structural nodes.
The boundary element method applied to the incompressible case can be regarded as a particular mass condensation method among several other techniques which aim at decreasing the extent of the great fluid-structure problems and, hence, at reducing the cost of the solutions [29, 34, 37, 39, 42, 44].
Methods have also been developed to deduce the dynamic characteristics of a modified system from those of the initial system [43]. The LMFBR vibration analysis needs such methods, as will be seen later.
References [48-55] provide more details on various aspects of the boundary element method.
4.1.4. Substructuring techniques
Let us finally say a few words about substructuring techniques, which also belong to the class of reduction methods.
Of these techniques, modal synthesis is perhaps the most efficient for vibra-tional applications [10, 30, 36, 38, 40, 41].
This method is of particular interest if the complex structure can be divided into simpler substructures which are connected with each other at a limited number of points. Then, each substructure is characterized, independently of the others, by a family of Nk natural modes, X k(F) , and Lk static solutions, U k ( r ) (where Lk is the number of connection points).
For this purpose, certain boundary impedances have to be imposed at the connection points, the extreme possibilities being blocked or free conditions.
Then, the displacement field of each structure, xk(F, t), is projected on the Xk(r) and Uk(r) bases:
N k L k
хк(Г, t) = g ak(t) X f ( r ) + £ rjk(t) и к ( Г ) (12)
i = i j = i
20

The role of the static solutions is to accurately introduce the local stiffness effects near the connections which would not be well represented by the truncated modal basis.
The equilibrium of each substructure and the continuity of displacements and forces at each connection point of the assembled structures allow the equations of the system to be made explicit, the new variables (91 = £Nk variables) being the modal components a¡(t) of all substructures and the nodal reactions r¡(t) at each con-nection point ( £ variables; in general, <£ = E Lk).
The set of equations has the classical symmetric matrix form:
(JC - co23TC) JC = 0 (28)
(in the Fourier domain). JC is the new DOF vector (.. a¡k(t) ... r-'(t) ...). The structure of the JC or 311 matrices is as shown in Fig. 6.
Finally, system (23) can be solved classically. Its size is much smaller than the sum of the initial DOFs, which have been used for the definition and the modal calcu-lation of the substructures.
The diagonal nature of the system makes its solution even easier, and the total cost of the operation (modal calculation plus final system solution) is certainly much less than the cost of a direct finite element 3-D calculation.
4.1.5. Available computer codes
The main large computer codes deal with the fluid-structure interaction. The most complete codes are NASTRAN (USA) and CASTEM (France); they are based on the finite element method and have substructuring and boundary element possibilities.
21

ШШ Ig- ^ I D Д В ' ' ¿ 1 1 Д i I'.;' .
Roof slab Large rotating- -Small rotating
plug 11||И plug Core cover plug — ; : [/¡ШЯ'ЩШЛ
I ^ B B ' ^ ^ B Primary '' '' Шяат--Шшяшж pump
Intermediate ^ К ^ к / ш Н ^ ^ Н ^ ^ Н Я ^ В . ' heat exchanger j|||™
Inner vessel ^ Core
Core support Diagrid structure | Н |
Main vessel • - Core catcher Safety vessel-
FIG. 7(a). Scheme of pool-type reactor block (Superphenix) [8].
Other computer codes (ANSYS, ADINA, BERSAFE, MEF, TITUS, etc.) are also available.
Some specific developments and applications have been made on LMFBRs [9, 56, 57]. Benchmarks have been made to compare the different computer codes (see, e.g., Ref. [33] on LMFBR structure).
4.2. PARTICULARITIES OF FLUID-STRUCTURE SYSTEMS IN LMFBR REACTOR INTERNAL STRUCTURE ANALYSIS
LMFBRs include structures of various types, which may differ according to the underlying concepts (pool- or loop-type). A general characteristic is, however,
2 2

CONTROL RODS
FIG. 7(b). Scheme of pool-type reactor block (SNR 300) [6].
the small thickness of the structures (as compared to PWRs) due to the fact that the internal pressure is relatively low. This feature explains their sensitivity to vibra-tions, the more so as they are connected to a dense fluid.
Another particularity is the existence of free fluid surfaces which may be the seat of sloshing phenomena.
A typical example here would be the internal structures of a pool-type LMFBR. We shall choose this example in order to illustrate the specificity and the difficulties of LMFBR flow induced vibration analysis.
4.2.1. Thin shells coupled to small fluid sheets
Figures 7(a) and 7(b) show the scheme of a pool-type reactor block (Super-phenix and SNR 300). The internal structures consist of thin concentric shells
2 3

01
H/0=0.5 (D=2RI
e/D=0.05 . 1 0 l "
10 10
FIG. 8. Non-dimensional resonance frequencies of a cylindrical thin shell versus azimuthal number n (for axial number m=l) for various boundary conditions [1].
(thickness-diameter ratio h/D » 10~3) separated by thin fluid sheets (thickness-diameter ratio e/D « 1(T2). The height-diameter ratio of these shells H/D is about 1. This particular geometry leads to the typical modal configuration shown in Fig. 8.
If we consider an ideal cylindrical shell in vacuum with various boundary con-ditions at its ends, its natural modes are given by:
For a family with given n (m = 1 in Fig. 8), the resonance frequencies fn m , in general, show two zones with respect to n:
(1) n < nmin (n 0): the evolution law is approximately n"2. The h/D parameter has no effect on fn m , but the H/D parameter and the boundary conditions are relevant (fnm oc (H/D)"2). In this zone, we see a 'beam-type' behaviour, i.e. the associated strains are essentially membrane axial strains.
(2) n > nmin: the evolution law is approximately n2 . The H/D parameter and the boundary conditions have no effect, but h/D is relevant (fnm oc h/D). In this zone, we observe a 'shell-type' behaviour, i.e. the associated strains are essen-tially azimuthal flexion strains.
Xnm(0, z) = Xm(z) cos пв (29)
2 4

For n = nmin, fn m is minimum. The thinner the shell, the higher nmin and the lower fnm .
This modal structure complicates the vibration analysis because in the low resonance frequency zones (which are most effectively excited by the fluctuating flow), the modal density is high.
The presence of a dense fluid does not modify this conclusion but changes the frequency range drastically.
By a one-dimensional (azimuthal) calculation, we can estimate the added mass due to a fluid sheet:
ж , D ma/height unit = — T pf D (30)
4n 2e
(for n > 1)
The ratio
ma _ 1 pf D D ms 4n2 ps h e
If
Pf 1 D , D , — = —, n = 10, — = 103 and — = 102
ps 8 h e
we have
ш. ms
= 30
The inertial effect of the structure is negligible compared to the inertial effect of the fluid.
Note: The effect of the fluid changes the evolution law of fnm with n (for n < nmin, we have fn m oc n3 , and for n > nmin, we have fn m oc n"1).
Application: If we consider a typical clamped free LMFBR shell connected to a fluid sheet D = 20 m, h = 0.02 m, e = 0.2 m, H = 10 m), the lowest frequency mode is n = 4 to 6 with fmin = 0.8 Hz, on the assumption that Eq. (30) may be used.
25

FIG. 9. Example of 3-D geometry: crossings of a primary pump of a pull-type LMFBR (Superphenix) [10].
4.2.2. 3-D aspects
The vessel and the main baffles of LMFBRs are axisymmetric. This symmetry is, however, destroyed by the pumps and heat exchangers and also because core and vessel are not quite coaxial.
The natural modes of this system are more complicated than those described in the preceding section. Each of them can be represented by a combination of cos пв. We may say that the defect in axisymmetry induces a coupling between the axisymmetric modes of the vessel and baffle system and the component modes (pumps and heat exchangers).
2 6

Note that this coupling is due to two types of connection:
(1) the mechanical connection between component crossings and redans (Fig. 9); (2) the fluid connection between component crossings and the cylindrical shell due
to sodium (Fig. 9).
This last type of coupling can be analysed by using the simple example of two non-coaxial cylinders separated by an incompressible fluid (Fig. 10).
The cos nв modes of shell 1 are coupled to the cos тв modes of shell 2 by a mass matrix.
The coefficients mnm can be calculated analytically by assuming that the fluid is only moving in the cross-section of the cylinders (this hypothesis can be applied if the shell height H is much greater than the shell diameter D).
FIG. 10. Two non-coaxial cylinders separated by incompressible fluid.
FIG. 11. Inertial effect of a coaxiality defect for two cylindrical shells separated by a fluid [1].
2 7

Figure 11 shows the evolution of m u normalized by (m u ) 0 , calculated by using the axisymmetric hypothesis. In the case of cylinders having rather different diameters and being close to each other, m n / ( m n ) 0 may be relatively high.
The coupling coefficients mnm (n ^ m) obey analogous laws. For example, the classical dimensions of the LMFBR structures lead to:
baffle diameter, D2 r = « 5 component diameter, D t
and
gap between baffle and component component diameter
so that т п / ( т ц ) о « 1.8. This result shows that the proximity of the baffles has a non-negligible
influence on the component inertia. Conversely, the influence of the components on the baffle inertia can be esti-
mated from
N mn/(m22)o = 12 X 1.8 X = 0 9
Here, N is the number of components, and (m22)o is the characteristic added mass associated with the baffle.
This influence is also non-negligible.
4.2.3. Shape defects of shells
Baffles are very thin shells (h/D ~ 10"3) and, hence, cannot be perfectly axisymmetric. In fact, we observe fluctuations of the radius versus the azimuthal angle в, ô(6), which may have the order of magnitude of the thickness h. This shape defect also induces a 3-D behaviour of the system which has two aspects: a mechanical and a fluid-structure aspect.
If we assume a ô(0) = 60 cos По$ defect, coupling terms appear in the stiffness matrix of the shell, between the n, n + no and n - no modal equations.
Let us consider the particular case of mode no- The stiffness matrix has cross-terms corresponding to the modes 0, no and 2no- It can be made explicit for a simple cylindrical annulus (considering only the variable в and neglecting the axial effects).
28

Let us neglect mode 2щ terms which play a secondary role only. We then have:
К = ко коД 2тгЕЬ
коп kn / D (31)
with
ko = 2
коп = no - I V 2Ô0
п 0 / D
If no is not too high, we have
korAnko — ' h V
+ , л ) ng
1, i fôo
n§ - 1
In this case, n = 0 displacements can be induced, corresponding to low equivalent stiffness (—flexion stiffness). This softening effect is characteristic of the shape defect.
If we now consider the fluid-structure aspect, we see that the shell defect creates a fluctuation of the normal vector and, therefore, of the direction of the forces due to pressure and also of the thickness of the fluid sheets. As to stiffness, we have an inertial coupling between the cos n0 modes.
Taking again one of the preceding examples, we obtain a mass matrix due to the fluid:
M = Г (32) \mo„ mn
The resonance pulsations of the system:
(К - ы2М) ( ) = 0
29

are given by
u
with
2
kok,
m 0 n V =
ШоШп
If ш0 « con, we have
1 - V y ± (VX - V^)
1 - Ц
The modification of the resonance pulsations is important because X and ~ 1. Both new modes are a combination of n = 0 and n = üq. If w0 > wn, we have, approximately,
and X and /л < 1. The modification of the resonance pulsations is weak, and both new modes are only coupled weakly.
Let us now return to the general case of a shell with arbitrary boundary condi-tions. We assume a cos Поб defect. The considerations set forth above may be extended to modes with n such that |n — n<)| = the few first integers (1, 2, ... , corresponding to modes having extensive shell effects). Figure 12 shows the typical evolution of the resonance frequency with and without defect (dashed curve). An no defect (with no « nmin) does not remarkably modify this curve because we cannot find an n such that |n — no| = 0, 1 or 2 and wn + no « o>n (Fig. 12, solid line and open circles).
An no defect (with no > nmin) modifies the curve in the zone such that |n — no I = 0, 1 or 2 if Gon_no = o)n (Fig. 12, solid line and full circles).
Therefore, a given shell connected to the fluid is sensitive to defects such that their в Fourier spectrum is located in a certain range of üq. Moreover, Fig. 12
a)2(l - X)
1 - M
30

60
50
to
30
20
Resonance frequency (Hzl
• n , = 12 ' о n,= 6 .
6, = 0 002 sinnz/H Iml /
x — - V - X
/ > у о St,*о
о ^
—
Coupled modes
J 1 I L J L
8 10 12 1t
FIG. 12. Effect of a harmonic shape defect on the resonance frequencies of a cylindrical shell versus azimuthal number n.
shows that a defect whose order of magnitude is equal to that of the thickness has a great effect on the resonance frequencies.
We note that the effect of shape defects has been studied, particularly in connection with methods of predicting the buckling risk associated with seismic exci-tation (see technical report [92]).
4.2.4. Fluid communication
A difficult point of fluid modelling is taking into account the communications connecting different fluid volumes of the reactor block.
For example, the fluid sheet limited by the main vessel and baffle B1 is connected with the under core collector by several holes. The same type of connec-tion exists between the restitution collector and the cold collector (Fig. 7(a)). Con-nections with free surfaces exist, for the cold and hot collectors, at the level of heat exchanger passages.
In general, these communications are non-axisymmetric, and their cross-sections are small compared with the size of the fluid finite element mesh.
31

Their modelling needs, therefore, special elements which create a fluid impedance Др/q, where Др is the difference between the pressures at either side of the communication and q is the mass flow rate through it.
This impedance represents the inertial effect associated with the 3-D velocity field near the communication which cannot be accurately described by the finite element mesh.
Figure 13 illustrates the situation.
^Э-D local I ef fect
FIG. 13. Communications between different fluid volumes.
t /d
FIG. 14. Evolution of the equivalent length associated with a circular hole (diameter d) separating two cylindrical cavities (diameter D) versus d/D.
3 2

The impedance Др/q can be represented by an equivalent length t
Др/q = -iat
(34)
where s is the communication cross-section. Figure 14 shows the evolution of IId versus d/D for a communication which
consists of a hole (diameter d) connecting two cylindrical cavities (diameter D) [93].
4.2.5. Fluid free surface — gravity effects
One of the characteristics of LMFBR block fluid volumes is the presence of a free surface (Ef), which represents a discontinuity of the fluid density.
In the linear hypothesis, the boundary condition on 2; is given by (8) (Section 3.2.3):
dp_
dz g (Fourier transformed)
If we assume that the fluid is limited by fixed shells, we observe a set of sloshing modes which are given, for a cylindrical cavity, by:
P„,m(r, в, z) = V R
' C 0 S " Л cosh Sin П0 ) R (35)
(the a n m designate zeroes of Jn'(x)).
• z
*• free s u r f a c e
b o t t o m
FIG. 15. Fluid free surface — geometry and designations.
The resonance pulsations are given by (for geometry and designations, see Fig. 15)
«nmH "n,m - A | «nrn tanh - • -—
К R (35a)
3 3

For a thin annular sheet, we have:
„ f e o s п(П Рш(9, z) = . J cosh (n z/R) (36) j^sm w J
The resonance pulsations are given by
g , H шп = In — tanh n — (36a)
\ R R
If we consider the classical dimensions of a pool-type LMFBR (R = 10 m, H = 10 m), the first sloshing mode (n = 1) has a resonance frequency of 0.12 Hz, which is much lower than the first fluid-structure resonance frequency ( — 0.8 Hz) (see Section 4.2.1).
The first sloshing mode corresponding to the same n as the first fluid-structure mode has a frequency of about 0.3 Hz.
This analysis shows that the first modes of the LMFBR internals are quasi-pure sloshing modes. As we shall see in Section 4.5, they are effectively excited by turbulence sources. The associated pressure fluctuations act on the shells whose behaviour is quasi-static in this frequency range.
In the higher frequency domain of the coupled fluid-structure modes, gravity plays a secondary role because the high order modes of this domain have an influence limited to the vicinity of the free surface. (The characteristic Froude number is w2R/g > 1.)
4.3. EXCITATION SOURCE CHARACTERISTICS
4.3.1. Flow pattern description
The most important wall pressure fluctuations are observed on the structures which limit the hot collector (internal shell of the conical redan, pumps and IHE crossings in Superphenix design) and the cold collector (toroidal redan, IHE outlets, pump skirts).
The flow in the hot collector is perturbed because of the core outlet jets impinging on the cover plug (the mean jet velocity is about 5 m-s"1). Moreover, the whole collector volume is the seat of large vortices which can interact with free surfaces. The flow in the cold collector is perturbed because of the IHE output flow which interacts directly with flexible structures. Hydraulic mock-ups have been built to visualize and measure the flow velocity field in hot and cold collectors. Unfor-tunately, very few fluctuating pressure transducers have been installed.
Figures 16 and 17 show the results of 2-D calculations [24].
34

IИХ i n l e t
FIG. 16. Hot collector 2-D flow pattern calculations [24].
4.3.2. Description of local fluctuating pressure field
Since the perturbed flow involves the entire collectors, we may use formula (12) (Section 3.3.2) and formula (15) (Section 3.3.3).
According to formula (17), the description of the wall fluctuating pressure field requires the knowledge of the power spectral density (PSD) Sp(r, f) and the correla-tion vector X(F).
Because of the loss of precise experimental information, a simpler description is chosen which assumes a mean constant PSD, S ^ f ) , and a correlation X ( I )(F) on the shells connected with the hot collector and with another S¿2)(f) and Xi2)(r") for the cold collector.
3 5

B1 B a f f l e
FIG. 17. Cold collector 2-D flow pattern calculations [24].

FIG. 18. Shape of pressure fluctuation power spectral density (PSD) [10].
Sp(f) and X have been measured directly at some points of the above-mentioned hydraulic mock-ups and have been adjusted to shell acceleration measure-ments performed on hydroelastic mock-ups.
The shape of Sp(f) is shown in Fig. 18. Let us note the very low cut-off frequencies (0.016 Hz and 0.04 Hz for the
hot and cold collectors) which would correspond to a characteristic dimension of 10 m with characteristic flow velocities of 1 and 2 m-s"1 .
The response spectrum of an axisymmetric shell is, from Eqs (15) and (17) and from the particular shape of the natural modes:
f e o s пв") x n , m ( s » 0) = xn m(s) ! . j (s = meridian co-ordinate) ' / C l f l П н 1
S R ( S , Э = £ Xn,m(s) IJn,
n, m m n , m ( < " n , m - W + 2 i e n > m w n m a > ) Sp(fn,m) (37)
3 7

with
1 - (—1)пе~*/9с 1 + (пвс)2 In = 2тг0с ^ \ ; л 2 (п * 0) (37а)
_ I s - - s[
Xn,m(s) X n , m (s ' ) е d s d s ' (37b) зге J art
The following remarks should be made on these expressions:
(i) As no dominant mean flow velocity exists, we neglect the transport effects; (ii) Xn m has the meaning of a radial displacement;
(iii) X5 and 9C are the meridian correlation length and the azimuthal correlation angle, respectively;
(iv) In is plotted versus вс and n in Fig. 19; we observe that In is maximum for 0C ~ 1/n;
(v) We note that S r does not depend on в. This is due to the general axisymmetry of the problem.
FIG. 19. Generalized force coefficient associated with the azimuthal modal shape cos пв versus fluctuation azimuthal correlation angle 6C [1].
3 8

4.4. DAMPING ESTIMATION
The energy dissipation is due to various phenomena. For welded structures, the structural damping is relatively low. However, 'in
air' tests conducted in Superphenix yielded es = 10"2 for the first natural modes. The fluid is an important source of damping, because of viscosity and flow-
structure interaction. The most intense effects are located in the fluid sheets where the fluid is most effectively confined.
4.4.1. Viscosity effect
If the viscosity forces are weak compared to the inertial forces, for a shell connected to a fluid sheet with constant thickness e, the modal damping e is a con-stant and a function of the Stokes number i>/coe2 (<i 1):
For e = 1(T2 m, f = 0.8 m, v = 1/3 X 10"6, we have е, = 2 х 10'2.
FIG. 20. Damping coefficient of a vibrating thin shell connected to afluid sheet. Comparison between experimental and calculation results.
3 9

A comparison between experiment and calculation made at CEA-Saclay is shown in Fig. 20, for the case of a simple cylinder in horizontal translation (n = 1, X(s) = 1 mode) connected to a thin water layer [59, 61].
4.4.2. Flow-structure effect
A meridian flow exists between certain baffles (for example, the feeding col-lector limited by the main vessel and the weir shell).
If we assume that the fluid is flowing from the clamped end of the baffle to its free end, the coupling between flow and the structure described in Section 3.4.2 induces, in this case, a damping force (due to the 'velocity composition' terms).
The damping coefficient is approximately given by
1 V ef = (39)
2 шН
where V / C J H is a reduced flow velocity associated with the meridian dimension H
of the fluid sheet. If V = 1 hi-.s"1, f = 0.8 H and H = 10 m, we have ef « 10~2. The value of the damping coefficient, es + e{ + ev = 4 X 10"2, is consistent
with the value measured on the Superphenix reactor block during the hot tests.
4.5. AN EXAMPLE OF VIBRATION PREDICTION: POOL-TYPE LMFBR INTERNAL STRUCTURE ANALYSIS
To illustrate the considerations developed in the preceding sections, we present the modelling and some results of the calculation of pool-type LMFBR internal struc-tures such as those of Superphenix. A comparison with on-site measured data will be made [8-10].
We have chosen a description using a substructuring technique based on the principle which has been roughly described in Section 4.1.4.
4.5.1. Modelling
The internal fluid-structure system is divided into axisymmetric fluid sheet-shell subsystems (free substructure procedure):
(a) The first subsystem corresponds to the main vessel, the different baffles and redans and the different fluid collectors. Figures 21 and 22 show the meridian finite element mesh and a 3-D view, respectively.
4 0

41

42

(b) The other sybsystems correspond to each pump and IHE and associated crossings (the different fluid sheets are included in these subsystems).
Figures 23 and 24 show a view of a pump subsystem and an IHE subsystem (finite element meridian mesh and 3-D view).
The axisymmetric description imposes the necessity of defining equivalent axisymmetric elements for the different communications and holes associated with the component crossings.
For each subsystem, we calculate a truncated modal basis. The truncation frequency is 25 Hz for the 'in air' analysis and 10 Hz for the 'in sodium' analysis (Table I).
TABLE I. NUMBERS OF NODES, ELEMENTS AND MODES CHOSEN FOR THE CALCULATION OF SUBSTRUCTURES
Substructures (in air) Nodes Elements Modes
Conical redan vessel 41 40 35
Toroidal redan vessel 105 105 62
Conical redan pump crossing 33 32 11
Toroidal redan pump crossing 47 46 8
Conical redan heat exchanger crossing 29 28 9
Toroidal redan heat exchanger crossing 29 28 8
TABLE II. GEOMETRY OF STRUCTURES AND MODES
Group Modal symmetry
1 Symmetr ic /XOZ and/YOZ even a cosine modes
2 Antisymmetr ic/XOZ and/YOZ even8 sine modes
3 b Symmetric X O Z , antisymmetric/YOZ odd2 cosine modes
4" Antisymmetr ic /XOZ, symmetr ic /YOZ odd8 sine mode
a Parity is related to azimuthal order number of vessel (conical or toroidal redan) modes. b Groups 3 and 4 are symmetric; they yield the same assembly frequencies. Only group 3
is calculated.
4 3

FIG. 25. Assembled structure (3-D view).
To assemble the different subsystems, several hypotheses have been set up. The connections between each redan (conical or toroidal) and the crossings are
made by writing the equality of the three components of displacement on the connect-ing nodes (12 for pumps, 9 for IHE).
No conditions are introduced on rotations. We consider two planes of symmetry (instrumentation crossings are
neglected). Therefore, only a quarter of the structure is modelled with four groups of boundary conditions, corresponding to four groups of modes of the entire structure (Table II).
For the 'in sodium' calculation, the coupling between substructures due to the hot collector fluid has been neglected. However, the diagonal added mass terms introduced in each substructure finite element model take into account the vicinity effect of the other substructures.
Figures 9 and 25 give a meridian and a 3-D view of the assembled structure.
4.5.2. 'In air' modal analysis results
The aim of the 'in air' analysis is to qualify the structural model on the basis of the on-site experimental results. In air, toroidal and conical redans are not coupled. Each assembly can, therefore, be analysed separately. The results of the calculation lead to the following remarks:
4 4

(a) 'Toroidal redan ' assembly
The lowest mode frequency is 4.05 Hz and corresponds to an n = 6, m = 1 mode on the VERT (= external shroud of toroidal redan) and thermal baffle with weak radial balancing of pump crossing.
A high density of modes is found (34 between 4 and 8.1 Hz), mainly corresponding to the modes of the different shells associated with the toroidal redan (VERT, thermal baffle and weir shroud, see Fig. 9). Important movements of pump crossings are observed in two frequency ranges (Table III).
The first modes involving important movements of pump crossings arise between 5.13 and 5.93 Hz. They correspond to a mainly radial balancing of pump crossings, and couple n = 4 and n = 8 (m = 1) modes of redan shrouds existing in the same frequency zone. They also couple important movements on heat exchanger crossings where balancing (n = 1) and circumferential shapes (n = 0 and 2) occur.
The second mode involving important movements of pump crossings arises at 7.59 Hz. It corresponds to a mainly tangential balancing of pump crossings and is coupled to an n = 3 mode of redan shrouds and to weak heat exchangers crossing the balancing.
(b) 'Conical redan ' assembly
The lowest mode frequency is 1.7 Hz. It corresponds to an n = 3, m = 1 mode on VERC (= external shroud of conical redan) and redan, with already significant coupling between radial balancing and circumferential (on n = 0) shape of pump crossings.
A lower modal density is found for the toroidal redan assembly (23 between 1.7 and 8 Hz). It appears that, for major modes, important couplings occur between redan shroud modes and between redan and crossings. Pump crossings intervene here by balancing and by circumferential shape in n = 0, 2; m = 1 ,2) , and heat exchanger crossings play an important role by balancing and circumferential (on n = 0) shapes.
In this case, many modes appear with important movements of pumps and heat exchangers. They cannot be simply isolated as for the toroidal redan, but the lower density of assembly modes allows them here to be separated into well distinguished groups as is indicated in Table IV.
4.5.3. Comparison with 'in air' test results
Table V shows a good agreement with the on-site measurement results: about 10% confidence in resonance frequencies. The mode shapes are also correctly calcu-lated for the main vessels and baffles as well as for the coupling effect of the crossings.
45

сл H Z щ S И > о
о Z Ео с/э О ой и Он
S û< н Z < H ой О Он S Я н
С/5 Щ Q О
Z с Q pq oí J < Q О ой О H
M J m < H
« <u 00 -rt G О
00 e
ou •S » c/i 0) СЛ Q. P «
I ° <£ e
•o 3 о a. M .c
•a о e
1 1 z
Q, 3 о Ън о
_Г "О с с S
с ^ —- тз оо Ç с 'о
-о - ~ с сз D се
S E
g
S " Il "3 Ë Ë
on a 'o e ce TS x>
Ой
с D 00 с
<u
cd «
Ш
5 "a о с тз M u f_
6 Я Ш 3 s СХ со
4 6

<D & ja _ и
о и g o S 6 * g1
« S ся
60 S СЛ ся 0) ся O cd о СЯ D, u
I I
•a 3 о
СЛ s 3 -a ^ 4 S ой E
u
1
с ï N
ex s о t-l О
Я <o
•O С я oo с о с
J3 "я х>
с я я \я С с о я Q, 00 £ Я
о.
fS I г-
'БЬ <и Z
оо с
_я •я X) M я « £
о. Ti-ll с
о
о
с я "я
и IS 'с 00
я с и во « с s U ё й> Я .S с U о в о. я Р я •5 х>
••3 11
S S
с -О
í I £ 8
5
о с я е 13 О •О S я с N 3 13 с > пз о £Р с сл я
с и оо
с я tí о а.
cT •a II e II я с p 00 о С с •s r,
'G s <N e и я II 13 > С Xi о
я
1м Ю о -а с а о
Й Я а? р, "§- о ^ I S 11 и о. с
1= я •а u N К J3 Ю
S "/"i I Г-г-
G tu О > и О S Й
g s к u ¡ ¡ 1 ° g 8 S, >< С u £ Z
47

TABLE V. EIGENMODES, IN AIR, OF INTERNAL STRUCTURES. COMPARISON BETWEEN CALCULATION AND TESTS
(1) Conical redan vessels
Calculation Tests
3.1
2.1
4.1
5.1
6.1
Pumps crossing modes:
Tangential Radial
1.7
2.24-2.43
3.02-3.06
5.04
6.78-6.85
4.44-4.81 6.01-6.92
1.58-1.74
1.9-2.35
2.68-3.15
4.16-4.43
5.87-6.25
3.9-4.4 6.92-7.5
(2) Toroidal redan vessels
Calculation Tests
6.1
5.1
7.1
8.1
4.1
Pumps crossing modes:
First Second
4.05-4.07
4.36
4.43
5.13-5.27
5.13-5.93
5.13-5.93 7.59-...
4.83-5.14
4.64-5.14
5.83-...
6.10-...
4.83
4.55-5.5 7.6-...
4.5.4. 'In sodium' modal analysis results
In calculation exhibits resonance frequencies reduced by a factor of seven compared to those 'in air'. 74 modes were found with resonance frequencies lower than 1.5 Hz for a calculation without taking into account sloshing (a complementary calculation including sloshing has been made in a lower frequency domain).
4 8

The first fluid-structure modes uniquely involve the conical redan assembly, with a weak coupling of crossings. It is only the seventh mode that begins to affect the toroidal redan assembly, and the 15th mode corresponds to a major effect of crossings.
The first fluid-structure modes have lower resonance frequencies (~0 .25 Hz), with n ~ 3, than those of the simpler cylindrical shell which has been taken as an example ( ~ 0 . 8 Hz and n = 4 to 6). This is essentially due to the specific geometry of the conical redan which considerably reduces the equivalent stiffness at its lower end.
4.5.5. Calculation of response spectra
Using the excitation source defined in Section 4.3.2 and a uniform modal damping coefficient e = 2%, we can calculate the response of the whole system.
The results are expressed in terms of a majorant of the root mean square value of displacement taking the most pessimistic correlation lengths and angles. They show that the cold collector source is dominant at the maximum of the response which is localized at the upper end of the conical redan vessel. This result is interest-ing if we consider that this source does not directly excite this vessel. The trans-mission effect is due to fluid coupling and 3-D mechanical coupling by the crossings.
A stress analysis shows that the maxima are located at different bends and junc-tions of the vessels.
4.6. WEIR FLUIDELASTIC INSTABILITY
The hot tests of Superphenix LMFBR have shown internal structure vibrations which were not in conformity with the predictions of the preceding section.
These abnormal vibrations were due to a hydroelastic instability occurring on their system which consists of a cylindrical shell separating two fluid collectors, the feeding collector and the restitution collector (Fig. 26).
This phenomenon, whose mechanism is described in Fig. 27, can be predicted by our substructure modelling if we take the overflow energy into account.
4.6.1. Modelling of overflow effects
The energy transfers between both feeding and restitution collectors can be written in terms of coupled boundary conditions at the free surface of each collector.
49

FIG. 26. General view of primary circuit of Superphenix LMFBR.
(a) Feeding collector boundary conditions
In addition to the gravity relation,
Pi = PigZ,
where Zx is the distance between the free surface and the edge of the weir (Fig. 28(a)). We write the relation between the discharge mass flow rate per unit
50

Stable overf low
Unstable overf low
Phase 1
Г <
Phase 3
Fluid impact
W e i r
Edge ' Sodium-.
FIG. 27. Scheme of the instability phenomenon observed in Superphenix LMFBR.
Free surface
2 i(3 ( -Main vessel
Feeding collector .
\ Weir _ — shell
Ж
t t t t t i e,—4
«d
( a )
Weir shell •
Free surface^
Mean free _ su rf ace
Rest i tut ion col lector
Vf
v 2
m m
( b )
1 H
1 1
fe1
Fall height
FIG. 28. Scheme of weir instability model [19]: (a) exploded view of feeding collector; (b) exploded view of restitution collector.
51

length qd and Z,. This relation depends on the shape of the weir edge, on the flow rates in question, on the surface tensions, etc. The shape of the reactor shell crest was designed to have a critical discharge flow for the weir range of operation and to hâve a discharged fluid film always adherent to the weir surface. Then, for perma-nent mean discharge flows, we have:
Í= к Vg Ъ \ а if Zx > 0
(40) = 0 if Z] < 0
where к is an almost constant coefficient. We assume that relation (40) can be extended to cover temporally and
azimuthally dependent situations. This will lead us to the introduction of a negative 'flow rate source', Aq b as a function of Z b at the boundary of this feeding collector: Aqi = 4d(t, 0) = - k Vg Z,3/2(t, в ) (41)
(b) Restitution collector boundary conditions
The discharged fluid arrives at the restitution collector free surface with a delay T, which corresponds to the fall time (Fig. 28(b)). A similar, but positive, 'flow rate source', Aq2, is then introduced at the boundary of the destitution collector:
Aqz = qd(t - г, 0) (42)
Otherwise, the falling fluid film along the weir shell will arrive with a velocity Vf. The momentum equation integrated over a small fluid volume near the free sur-face demonstrates the existence of a force per unit length:
F(t, 0) = - p f q d ( t - r , 0)Vf (43)
Relations (42) and (43) are written, in addition to the gravity relation, p2 = Pfg Z2. To estimate the delay т and the film velocity Vf, we must consider the friction
effect along the weir wall. For this purpose, we use the Manning correlation and obtain expressions for
T and Vf, which are functions of qd and the fall height H (these expressions have been validated experimentally).
4.6.2. Characteristics of the new hydroelastic system
Relations (41), (42) and (43) are new non-linear boundary conditions for the global fluid-structure system. Moreover, they induce non-conservative effects.
52

Flow rate 4 _
3 _ - (b)
• • î̂ * lea! а • • • • • « * • • • qC| « •
: г: :o
b
i j
2 _
• • î̂ * lea! а • • • • • « * • • • qC| « •
!
ôbo° j
1 _ 1 Fall i height
i a 1 1 1 2
i i 3 4 i i 5 6 7 8
SPX REACTOR Frequency f2 Azimuthal order n¿
FIG. 29(b). Instability domain for type 2 mechanism (fluidelastic) [19].
53

The newly defined fluid-structure system can be studied in terms of stability and also in terms of non-linear behaviour.
(a) Linear stability analysis
Relations (41), (42) and (43) are linearized around the height ho, which represents the mean value of Z b and the mass flow rate qd0, which characterizes the permanent discharge regime. A stability analysis of the corresponding fluid-structure system shows that two types of instability can occur:
(i) A 'bimodal' instability which involves two coupled modes with close resonance frequencies. This situation is found in the very low frequency domain where the system has quasi-pure sloshing modes: for a given azimuthal number n, the sloshing modes of each collector (feeding and restitution) are coupled by the motion of the weir shell.
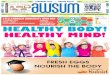
, If we vary both main hydraulic parameters of the problem (the fall height H and the permanent discharge flow rate qd0), we can build a stability diagram (H, qd0), an example of which is given in Fig. 29(a).
The analysis shows a value n, of n which is the most sensitive one to instability.
(ii) A 'monomodal' instability occurring on certain fluid-structure modes for which sloshing plays a secondary role. The frequency range of this type of instability is higher. A critical value n2 of n also corresponds to it.
Figure 29(b) shows the typical associated stability diagram (H, qd0).
(b) Non-linear analysis
Calculations versus time can be carried out by using the exact forms of (41), (42) and (43). The system is placed into an arbitrary initial configuration, and its time evolution is determined.
The main result of this non-linear analysis is, when the system is in an unstable configuration, to demonstrate a stationary state which is a combination of several (n, m) modes.
The amplitude and the spatial shape of this stationary state are functions of the imposed feeding flow rate and of the initial fall height.
Figure 30 shows typical calculated time histories; in Fig. 31 we see a typical shape of the 3-D motion of the system (weir and free surfaces) at a given time.
4.6.3. Comparison with on-site measurements
To specify the stability domains, many hydraulic configurations have been studied during the hot tests of the Superphenix reactor. The results are very similar to the calculated ones (Fig. 32). Moreover, the characteristics of signals observed
54

FIG. 30. Different non-linear regimes (weir radial displacement). Here, H = 2 m; qd0 = 0.3 m3-s'1.
in an unstable configuration — high level, periodicity (with a lot of harmonics), low frequency modulation (Figs 33 and 34) — are the same as those obtained by non-linear calculation.
4.7. SPECIFIC METHODS FOR TUBE BUNDLE VIBRATION ANALYSIS
Tube bundles are structures that are particularly sensitive to flow induced vibration, and many related troubles have occurred in various industrial installations (nuclear reactors, oil industry installations, conventional boilers, etc.).
Compared with the other types of bundles, LMFBR tube bundles (IHX and SG) do not exhibit any remarkable peculiarties. Therefore, the methods which have been developed for more than 15 years can be applied successfully in this area.
In this section, we shall only give a general idea of these methods. For further information, the reader is referred to more specialized literature [64, 71].
55

FIG. 31. Typical shape of 3-D motion of the system (weir and free surfaces) at a given time.
Flow rate
Stable art
• Unstable areas
lso-ampl¡tude curve
Fall height
1 2 3 4
FIG. 32. Instability domain of Superphenix reactor [18].
56

FIG. 33. Measured time histories [18].
ЛЛ/АлЛлЛЛ/^^
FIG. 34. Low frequency modulation (measured).
4.7.1. Vortex shedding and whirling instability
The fluidelastic phenomena arising inside a tube bundle are very complex, especially in the more dangerous case of cross-flow excitation. Compared to the fluidelastic problems which we have analysed previously, the structures are simpler here (the tube dynamic characteristics are always calculated by using the beam hypothesis) but flow and, therefore, fluidelastic forces are much more complex. For this reason, the methods of estimating them are essentially based on experimental observations.
(a) Characteristics of the fluctuating forces acting on a fixed cylindrical obstacle
The cross-flow fluctuations behind a cylindrical obstacle (isolated or inside a bundle) are somewhat different from the turbulent fluctuations analysed in Section 4.3.
57

DIMENSIONLESS PSD ( 5^/Pf V2D)2V/D)
101 1 1
0 0.1 0.2 0.3 0Л 0.5 0.6 0.7 STROUHAL S=fD/V
FIG. 35. Power spectral density (PSD) of lift and drag forces for a single cylinder in cross-flow [1].
In fact, in some cases a narrow band phenomenon can be demonstrated. This phenomenon is called vortex shedding; it is characterized by a Karman-Strouhal number, sK, which is 0.2 for a single tube (see Fig. 35, which shows the shape of the power spectral density (PSD) of lift and drag forces per unit length acting on the tube, in non-dimensional co-ordinates) and varies from about 0.1 to 0.6 for a bundle. It should be noted that for very close bundles (characterized by transverse and longitudinal reduced pitches, XT/D and XL/D, less than about 1.5), vortex shedding is difficult to distinguish from the general turbulence for tubes located inside the bundle (Fig. 36).
In all cases, however, as we shall see later, a certain sensitivity of the non-stationary flow to wall perturbations is observed in a specific frequency range.
Figure 37 shows a typical PSD of fluctuating forces acting on a tube located in a 1.5 square pitch bundle.
FIG. 36. Lift and drag forces, transverse and longitudinal pitches.
58

s \ A
P ' D - I . 3 1111|
X
о
10"' Г
: MASS FLUX
m • Ч-.- '-т-' 1123 О
г 1300 д
; 1873 7
; ггза <i
. гвгз •
3000 • 1 0 " 1 0 "
Э373 •
; 3730 А
- 4123 т
% \ % \ %
\
I , , l l l _ 1 — t REDUCED FREQUENCY CfD-"V0> 10
icr'F DRRG - P ' 0 - 1 . 5 i M i M|
о л A URSS
игз FLUX • m7
О 1500 Л 1873 V ггзо <1 2623 • эаоо • ЭЭ73 • 3720 А
4123 Т
\ <4
07 8
REDUCED FREQUENCY { ( D / V r ) 10
FIG. 37. Non-dimensional power spectral density for a tube row subjected to water cross-flow (square pitch = 1.5) [13].
More precisely, knowing the PSD of the fluctuating forces per unit length and their longitudinal correlation length X, and, moreover, assuming a linear behaviour of tubes, we can predict their response by using the general formulas of Section 3.3.3.
Unfortunately, fluidelastic effects and non-linear interaction between tubes and tube supports complicate this scheme.
(b) Fluidelastic forces in a tube bundle
Fluidelastic forces have been measured directly in a bundle by Tanaka [69] and Chen [12]. The principle of the measurement consists in generating an imposed harmonic motion (X0 exp (iwt)) of a given tube and selecting, in the PSD of the forces per unit length acting on the tube itself or on the tubes next to it, the deter-ministic component F(f) at the excitation pulsation и (= 2itf).
The results of this analysis are represented by a set of diagrams plotted in non-dimensional co-ordinates:
V Reduced flow velocity: VR =
(44) F(f)
Force coefficient: a = ; îPf V Xq
59

Fluid-force coefficient
«¡i = «ij + «и
Î а / а 1 0 0 3 cm/s
0.5- Л 12 \ a 15.37 cm/s fa • Г • 10.03 cm/s
f r \ 1 31 о 15.37 cm/s
а
Ш v _ ° ®
f © ( D O * Reduced flow velocity
-1 6 I I I Г л I I I
-0.5
20 40 60
0.5
-0.5
- 1
Fluid-force coefficient
•• U10.03 cm/s 0112 U 15.37 cm/s • feW.OB cm/s 13 \ о 15.37 cm/s
( ^ ^ t d C Î ^ T Î — 1 g
Reduced flow velocity
_ l I 1 ^ 20 40 60
FIG. 38. Fluidelastic forces coupling adjacent tube motions in a bundle. Evolution of the fluid-force non-dimensional coefficient versus reduced flow velocity [12].
Each diagram corresponds to a component of tube motion and force (drag or lift) and to a given tube in the vicinity of the excited one.
Figure 38 (from Ref. [12]) shows such diagrams (for the displacement and force component parallel to the flow). We observe that, for high reduced velocities ( > 1 0 ) , the force coefficients do not depend on the frequency so that we may apply the quasi-static hypothesis (see Section 3.4.2). For reduced velocities less than 10,
60

we are in the sensitive zone of the unsteady flow, and a is very rapidly dependent on f. If X0 is low (X0/D < 10"2), a does not depend on X0, i.e. the linear assump-tion is valid.
(c) Fluidelastic induced instabilities
If we consider now free vibrating tubes, the linear system formed by the modal equations of tubes, including the fluidelastic forces, can be studied in terms of stability analysis. Classically, the analysis is conducted in the vicinity of a given resonance frequency f 0 of the tubes (which are supposed to have almost the same characteristics). The results are represented in the (VR, AR) diagram, where VR is the reduced flow velocity:
r 0D
and A r is the mass damping coefficient (see Section 3.4.2)
m „ A r = ^ 2 T 6
m being the mass per unit length including fluid inertial effects. Figure 39 shows the typical limit of the stability diagram of a jingle row [12],
which is divided into two zones:
Low Ar zone (< 1): the instability is dominated by the diagonal negative terms induced by fluidelastic effects, in the Karman sensitivity domain of the flow (VR ~ 1/st ~ 2 to 5).
This phenomenon is particularly clear for the single tube and is sometimes called lock-in: When the flow velocity increases and reaches the critical value V1(
vortex shedding is 'regularized' at the resonance frequency of the tube, and the level of vibrations increases abruptly (Fig. 40). The phenomenon disappears beyond a certain flow velocity V2 (note that the limits V{ and V2' are different for decreasing flow velocity).
High Ая zone ( > 1): here the quasi-static behaviour is dominant. In this case, the instability comes from the cross-fluidelastic terms (force acting on tube 1 in the drag direction due to the motion of tube 2 in the lift direction — force acting on tube 1 in the lift direction due to the motion of tube 2 in the drag direction).
The quasi-static model (first proposed by Connors [64]) leads to the limit of stability law:
(Vr)c = C(Ar) 1/2 (45)
61

1 I I 1 n i l 1
UNSTABLE REGION
1 l i l i l í
STABLE REGION Flow
o o i o o "
UNSTABLE REGION
Experiment . Theory STABLE REGION
i i i i m i l 1 i l 0.1 1 10
Ma» damping parameter
; t i l l 111111 1 I • 1 • 111J i i n \ \ w \ y 1 111 i i Z Tube wall thickness Theory Experiment -
0.79mm A -
- 3.16mm •
1 -
— 1 Flow —
¡ oodoo
-
i i i i mill 1 1 i Mill! i i l i i 11111 0.01 0.1 1 10 100
Mass damping parameter
FIG. 39. Typical instability diagrams for a single row [12].
FIG. 40. Scheme of the lock-in phenomenon. Evolution of the vortex shedding frequency fk
and of the vibration level a versus flow velocity.
62

FIG. 41. Typical instability pattern of a row.
102
VR
10
: 1 111 I I I 1 1 1 I 11111 1 1 M 111 ! 1 1 1 1 1 1 l l l | 1 1 I I 1 l l l | 1 l =
о • Tanaka t Takahara (1981) о о -
x Chen & Jendrzejczyk 119811 S - -~ О Gross 11975)
° Д Connors (19781
О $ e® _
О О О 8 ^ ^
- v Hartlen I197U О $ e® _
О О О 8 ^ ^ » Soper (19801
О $ e® _
О О О 8 ^ ^ « Blevins (1981)
Г • Gorman 119761 а л ;
: • Heiiker & Vincent (19801 X
- Zukauskas 4 Katlnas (1979) * *
/ -- a • Pettigrew et al 119781
• X
-
S q u a r e
- f m ï ï ï i i m i n i l i 1 1 1 1 l i l i 1 1 i i 1 m l i i 1 м m l i i 1
102
Vr
10 - 2 10 - 1
10 -
"I I I I I I I I I
о Gross (19751 x Yeung i Weaver (19911 » Gorman (19761
v Hartlen Ц97М * Chen & Jendrzejczyk 119611
» Soper 119801 < Connors (1980)
+ Heiiker i Vincent (1980)
• Zukauskas i Katinas 11979) a • Pettigrew et al (19781
1 1 — l i l i
10
~ 1 — I — I M I l l |
10* Ar
T
J I I I I ! T r ¡ a n g u 1 a r
I I I I I I I 11 I I 10 102
FIG. 42. Results of experimental instability analysis for various bundles plotted in the AR-Vr instability diagram [12].
63

Figure 41 shows a typical instability pattern of a row, where the coupling between tubes is clearly shown. More than in the preceding AR zone, the stability limits are sensitive to pitches and arrangement of the bundle and also to resonance frequency dispersion from one tube to another. Figure 42 shows, in the (VR, Ar) diagram, the results of experimental instability analysis for various bundles.
4.7.2. Non-linear interaction between tubes and tube supports
Tubes of IHX or SG bundles are multisupported. Often the tube-support connections are not perfect. For example, a certain nominal gap exists, simply to make the set-up of the bundle possible.
Statistically, the tubes are more or less well connected to their supports. Some supports may be inactive and then the tube which was designed so as to be in the hydroelastically stable domain may become unstable since its characteristic length is multiplied by two and, therefore, its first resonance frequency decreases substantially.
In this case, the vibration level is stabilized by impacts and slidings between tube and support. This situation often leads to unacceptable wear of tubes.
FIG. 43. Simulated steady regimes of a tube impacting on a support for different support rigidities Kc (tube unstable: V/V0 = 3 if support is inactive, tube support gap = 0.5 mm) [13].
64

FLOW VELOCITY, I I / »
6 8 10
0 1 2 3 4
FLOW VELOCITY, m / i
FIG. 44. Root mean square displacements as a junction offlow velocity for various diametral gaps [12].
In this field, the prediction methods are rather difficult because of the non-linearity of the phenomenon and also because the required information is precisely the impact and sliding histories.
Actually, simulations versus time work rather well. The results show, however, that the stable non-linear regimes depend strongly on the initial conditions
65

and on some local parameter (as local stiffness of support, fluid effects, ...) (Fig. 43). In particular, we observe regular or chaotic regions, which correspond to quite different force and sliding time histories [13, 14].
In fact, the best suited method would be direct stability analysis of the non-linear system. Unfortunately, this constitutes a very complex and so far unsolved mathematical problem (some interesting approaches have, however, been made in the last few years).
Experimental approaches are also possible. Figure 44 shows the typical evolu-tion of vibration level versus flow velocity. Three zones appear:
for low velocities: no contact between tube and support (the system is stable)
for medium velocities: contacts between the tube and support (the system is unstable with inactive support)
for high velocities: quasi-permanent contact between tube and support (the system is unstable with active support).
4.7.3. Wear prediction
Wear is also a complex and not very well known phenomenon. Actually, partial experimental data are available concerning pure sliding tests. Parameters that were mainly studied are:
— the type of material
— the chemical environment (without and with flow)
Other important, but less well studied parameters are:
— the geometry of surfaces in contact — the mixed impact and sliding histories
The results are globally represented by the Achard law:
vm = К Fn X (46)
where vm is the material volume removed, Fn is the normal contact force of both samples, and X is their relative displacement. This formula is applied to the complex time histories obtained by dynamic calculations [13, 14].
4.8. SPECIFIC METHODS OF PIPING ANALYSIS
The piping systems are characterized by transverse dimensions that are small compared with the longitudinal ones.
66

LMFBR pipes are rather thin. Two types of dynamic behaviour may be observed:
Shell behaviour: in this case, the general methods described in Sections 3 and 4 and applied to reactor block internal analysis, may be used without any simplification. Beam behaviour: in this case, a simplification can be brought about in the general formulation, both as far as fluid-structure system characterization and the sources of excitation description are concerned.
4.8.1. Mixed displacement-pressure description
The dynamic behaviour of a piping system is governed, in the low frequency range, by the beam hypothesis: the motion of the structure is described by the motion xs(s) of the mean fibres (<£) (s being the curvilinear abscissa).
As to the fluid inside the pipe, the acoustic wavelengths of fluctuations are large in comparison with the transverse dimensions (coD/c <i 1).
Consequently, transverse fluid motion is equal to transverse pipe motion (x's). Longitudinally, a plane wave system is generated by beam motion in the singular parts of the pipe (elbows, changes of cross-section, ...).
If p(s) is the plane wave pressure and 7r(s) = — p(s)/w2, the variational quad-ratic form (23) becomes:
s
FIG. 45. Geometry related to expression (47).
J_ 2
JE PsSs(Xs)2
+ PfS(%)2 ds — 4 2 J js Pf
ds -£ PfC
S Y p7rds
(47)
67

where Ss is the cross-section of the pipe wall, S is the cross-section of the fluid, i is the unit vector tangent to £ , Fis the unit vector normal to the osculatory plane of £ , and R is the radius of curvature of £ (Fig. 45).
The equilibrium equations associated with (47), after elimination of -IT and rewriting in the time domain, are given by
- - P - dS -К xs + (psSsxs + p,S xst) - -f- S t + p —— i = 0
R ds
(48)
d /S dp \ S .. S i - d S i i - ^ — — я ) - " Г " P - V + - — = 0 ds \ p f ds J с pf R ds
where К is the classical beam stiffness operator. Equations (48) clearly show the coupling between the beam equation of
structure and the plane wave equation of the fluid only in the bended parts or in the cross-section changes of the pipe.
is,| d D is,)
FIG. 46. Example of a piping singularity: the conical enlargement.
4.8.2. Source of excitation description
The main sources of excitation of a piping conveying a fluid are located at the singular zones such as sudden enlargements, bends, junctions of pipes, valves, pumps, obstacles, etc. (Fig. 46): If we exclude pumps which can generate excitations in the medium frequency domain, all these singularities are low frequency sources. The dimensions of the corresponding perturbed fluid volume Vf are small compared to the characteristic acoustic and structural wavelengths. Therefore, the source associated with a flow singularity can be considered pointlike in Eq. (48).
Moreover, if we apply expression (11) to natural modes which show virtually no deformation in Vf, we can explicitly specify this source, which may be reduced, for only weakly compressible fluids, to a discontinuity Ap(t) of the fluctuating
68

10"
10 I-2
10"
10
í4p(s)
10 I-5
10 I - 6
а =ч7° (0.5*d/0?0.7tl
J I I I I I I l I j L .
s=f|D-d)/V i i i i .
10 I-3 10" 1 0 "
FIG. 47. Experimentally obtained PSD for conical enlargements of different angles a and d/D ratios [1].
pressure averaged over a cross-section (terms 2 + 3 of Eq. (11)) (see Ref. [1], Ch. 19).
Ap(t) is a random function of time which is characterized by its power spectral density (PSD) SAp(f).
This PSD is, in general, represented in non-dimensional co-ordinates. It is interesting to use the following mean flow quantities as a reference:
— the static pressure gap ДР between upstream and downstream of a singularity, — the maximum mean flow velocity V in a singularity,
69

— I
6¿1<T Г ? { rsi
E h — -
t s g
70

71

— a characteristic dimension such as the difference of upstream and downstream tube diameters for enlargements:
s = f ( D - d )
S A P ( S ) =
V
Ap(f) v ДР2 D - d
(49)
Figure 47 shows such experimentally obtained PSD for enlargements of different angles a and d/D ratios. Reference [1] contains a list of fluctuation charac-teristics for the most current piping singularities.
4.8.3. Example of piping analysis in low frequency range
A typical water circuit has been tested (see Réf. [1]): it includes straight pipes, bends and supports. It is acoustically isolated from the rest of the rig by fluid volumes including a free level, the mechanical isolation is by bellows (Fig. 48). The main excitation source is a half-closed gate valve whose PSD has been determined in a different way. Several flow velocities and valve opening parameter values have been tested. Figure 49 shows a comparison between prediction and direct accelera-tion measurements. Only the low frequency part of PSD is analysed. It is constituted by the first resonance peaks of the fluid-structure systems.
4.8.4. Instability phenomena
Pipes conveying a fluid may be unstable for flow velocities V0 higher than a critical value Vc. The mechanism of such an unstability is explained by using the general theory of Section 3.4.2.
(a) Beam mode instability
For the particular case of a straight tube vibrating according to the beam flexion modes, the general equation (18) becomes [74, 75]:
EI ^ + S(AP0 + PfVq) ^ dz4 dz¿
+ 2 p f S V 0 + (ps S s + PFS)XS = 0 (50) dz
where ДР0 is the difference of the permanent pressures internal and external to the
72

S s=;
S г
FIG. 50. Geometry of Eq. (50).
FIG. 51. Evolution of the first complex resonance frequencies of a cantilever tube versus internal axial flow velocity. In this case, the instability is observed on the second mode for VR . 5.6 [Ц.
Я VQ — ъртшшшппшишш. У I
FIG. 52. Relationship of V0 and I
73

pipe (EI, ps, Ss are Young modulus, density and cross-section of the tube wall, respectively). Figure 50 illustrates the situation.
Figure 51 shows the influence of the fluidelastic terms of Eq. (50) in the case of a cantilever tube: For the first three natural modes, the evolution of the real and imaginary parts of the complex resonance pulsation is plotted versus the reduced velocity:
VR « ^ ^ £V 0 EI
Here, /3 = pfS/(pfS + psSs) = 0.2 and ДР0 = 0 (Fig. 52). Figure 51 demonstrates the existence of critical velocity of about VR = 5.5
appearing on mode 2.
(b) Shell mode instability
The preceding theory (developed by Paidoussis, [72]) has been extended to shell modes by Weaver [77, 78].
Figure 53 shows the evolution of the critical dimensionless velocity Uc = (V0)c V l 2 ( l - v2)pf/it2E of a pined-pined tube (f is the tube length, R the mean tube radius and h the tube thickness) versus l/R. The figure shows that Uc
associated with shell modes (n 1) does not depend on the length I, for large values of £/R. Moreover, the shell mode critical velocities may be lower than the beam mode critical velocity. In practice, the critical flow velocities associated with the piping system of LMFBR are generally much higher than the nominal velocity.
0 10 20 30 (.0
FIG. 53. Evolution of the critical non-dimensional flow velocity for a pined-pined shell in an internal axial flow versus thickness to diameter ratio. The calculation has been carried out for the first azimuthal modes n = 1, 2, 3 [77].
74

However, a stability analysis has always to be done before a classical vibration level estimate as illustrated in Section 4.8.3 is carried out.
4.9. SPECIFIC METHODS OF PUMP VIBRATION ANALYSIS
The specific relevance of pumps to a vibration analysis consists in the rotating motion of the shaft which induces a forced harmonic excitation at the rotation pulsa-tion Í2, due to a slight unbalance.
This excitation may coincide with resonances of the structures and, in particular, of the system formed by shaft and connected fluid and shells.
In general, sodium pumps work such that the first resonance (pulsation w0) of the shaft is higher than Í2 (subcritical regime). However, to increase performance and decrease cost, the tendency is to design less rigid shafts and, therefore, to move co0
closer to Í2. It may even be interesting to choose a hypercritical shaft concept, in which case an accurate calculation of the critical conditions would be necessary [84, 85].
4.9.1. Dynamic equations of an immersed shaft
The rotation of the shaft induces additional terms in the fluid-structure coupled equations:
(a) Gyroscopic terms are associated with the angular momentum of the shaft itself, Iz Í2 k. In both flexion equations, which describe the small shaft motions (x(z, t), y(z, t)) in the normal plane ( i , j ) , we obtain cross-terms (Fig. 54):
= 0
(51)
C . ^ n
к
FIG. 54. Geometry of shaft rotation.
75

(b) Special fluidelastic terms due to the coupling between the rotation of the fluid around the shaft and the motion of the shaft:
In general, the shaft is surrounded by a fluid sheet (limited externally by a shell, Fig. 55). The shaft-fluid sheet inertial interactions are characterized by an added mass per unit length, ma(z), which can be estimated from the 'two-dimensional' formula:
ma = TrpfR Ri + R? -
R? R?
FIG. 55. Shaft surrounded by fluid sheet.
The fluidelastic terms can also be calculated two-dimensionally by using the assump-tion that the tangential flow velocity is fi/2 (for slightly viscous fluids) [22, 82]. Equation (51) then becomes:
d2 / Э 2 х \
- t f VEI + (ms + ma)x
fl2 д / ду \ - ma —— x + — IZÍ2 - f - + ma í íy = 0
4 dz \ dz J
d 2 / 3 2 y \
Q2 д / д х \ - ma — - у - — (IZÍ2 — - m a f ix = 0 (52)
4 dz \ dz J
Viscosity terms (see Section 4.4.1) have to be added to Eqs (52) to complete the description of the fluid effect.
76

Some difficult points of modelling should be mentioned:
— In the labyrinth zones, the viscosity terms are not small in comparison with the other terms, and the simplified formulation of Section 4.4.1 cannot be applied (Stokes number — 1). Moreover, the axial dimensions are not large in comparison with the transverse ones so that three-dimensional correction has to be carried out.
— At the free fluid surface, a diphasic mixture appears as a result of rotation. The associated variation of p{ may have a non-negligible effect [83].
— The added mass associated with the fluid-structure interaction at impeller level may play a certain role and may be difficult to estimate because of the 3-D geometry.
4.9.2. Fluid bearing calculation
Finally, the shaft is supported by bearings whose stiffness and damping are important parameters of the shaft dynamic behaviour [86, 87]. In particular, LMFBR pumps have sodium bearings where stiffness effects come from the fluid-structure interaction in a very thin fluid layer.
Fluid bearing may be hydrostatic (when a static overpressure is applied in alveoli) or hydrodynamic (when fluid rotation effects are used).
In general, LMFBR pumps have hydrostatic bearings, but fluid rotation effects are non-negligible.
The equation used in the fluid layer is the Reynolds equation, which is obtained from the Navier-Stokes equations on the assumption that viscosity forces are dominant:
where p is the pressure variation due to the layer thickness variations, e(y, z, t). H is the dynamic viscosity coefficient (Fig. 56).
Assuming rigid body motions for the rotor, the solution of Eq. (52), with é = 0, allows an asymmetric stiffness matrix to be calculated. Introducing the é term, we obtain a damping matrix.
Let us note that the difficulty of this solution lies in the appropriate choice of boundary conditions at the alveoli edges, and also in the inclusion of some non-linear phenomena such as turbulent flow zones, layer ruptures, etc.
Finally, bearing stiffness and damping matrices are introduced into shaft modelling. The system (Fourier transformed) is solved in terms of complex mode functions of the shaft angular velocity Í2.
(53)
77

Developed fluid layer
1
и / ц ,
tJ0 = 'in air' shaft resonance pulsation
f) ma
I / ] u 0 2(ms+ma)
I '
Vms/(ms+ma) / 4 / / 4 / N.
/ • •
I I I 1
1 1 1 1 1 1 1 1 n / u „
2Vms/ma 2 2\/(ms+ma)/ma
FIG. 57. Evolution of the first resonance frequencies of a pined-pined shaft versus angular
velocity Í2 [1].
For example, Fig. 57 shows the evolution of the real part of the first resonance frequencies versus 0 in the simple case of a pined-pined shaft (neglecting gyroscopic effects).
The calculations demonstrate the existence of two modes for the same axial shape: a retrograde mode which is not excited by imbalance, and a direct mode which is excited by imbalance. The critical velocity is given by the intersection of the direct mode curve and the straight line ы = Í2.
Figure 57 also shows the possibility of an instability.
78

5. IMPACT ON THE DESIGN
In the preceding sections, we have described:
— the principal vibrational phenomena which may occur in LMFBR fluid structure systems;
— the physical parameters by which they are governed; and — the methods available to calculate and predict them.
Let us now discuss the impact of vibration analysis on the design, according to the different components and to the different types of concepts, in order to work out the rules to be followed so that vibration problems can be avoided.
5.1. REACTOR BLOCK VESSELS AND BAFFLES
For this type of structure, vibration risks are due to:
— intense pressure fluctuations caused by a particularly perturbed flow pattern in the collectors;
— high structural flexibility due to the large size and the small thickness of shells.
5.1.1. Flow pattern
The optimization of the flow pattern in collectors is an important aspect of the LMFBR internal design, especially for the pull-type concept. For hot collectors, the main problem consists in avoiding cover gas 'entrainment' and strong free surface sloshing. A good design must lead to a calm free surface and to a regular feeding of IHX. For this purpose, a lot of hydraulic parametric mock-ups have been built to optimize internal shapes, distances of components, etc. Such a flow pattern also leads to a decrease in the pressure fluctuations. Therefore, a well designed hot collector does not induce any significant excitation in the boundary structures.
Moreover, in Sections 4.3 and 4.5 we have shown that a cold collector constitutes a more intense source of vibration. This source is essentially due to the IHX outlets acting on the IHX itself, on pump crossings, and on certain parts of toroidal redans and baffles.
The source intensity is a function of the jet velocity at the IHX outlet which is difficult to reduce. It is, in general, easier to act on the position of the IHX outlet in a cold collector.
5.1.2. Structural flexibility
Structural flexibility is surely the main cause of vibrations. LMFBR vessels and internal structures are thin and, therefore, flexible. However, the loop concept
79

r »... V,
I n i t i a l w e i r c o n c e p t i o n
nil
¡ i
s i l ! : : э : : : : I
??¿é
"0000 1 1 1
: :ó
— i 1 1 1 г I m p r o v e d w e i r c o n c e p t i o n
FIG. 58. Pull-type LMFBR weir instability diagram (Type 1 sloshing mode).
leads to a relatively limited vessel diameter and, therefore, to a limited vibration risk. On the other hand, pull-type LMFBRs have large vessel diameters; hence, they are much more sensitive to flow induced vibration.
The vibration risk has two aspects:
(a) The stress fluctuations induced by the normal response of shells to flow excitations must be beyond the material fatigue limits. For a classical pull-type design, stress fluctuations are, in general, acceptable but non-negligible. Therefore, flow patterns have to be designed carefully, flow velocities cannot be increased significantly nor can shell thicknesses be decreased substantially.
80

(b) If the design includes a weir, a special stability analysis has to be carried out in order to verify that the different hydraulic configurations of the reactor are inside the stable area of the (H, q) diagram (see Section 4.6).
Therefore, particular care has to be taken in conceiving the global hydraulics of the reactor, especially in order to reduce the fall height which depends on the pressure gaps between the different collectors [19, 20].
The flexibility of the weir shell has also to be decreased. Figure 58 shows the importance of the unstable domain due to a design modification of the weir.
5.2. ABOVE- AND UNDER-CORE STRUCTURE CONTROL RODS AND INSTRUMENTATION DEVICES
. Several other reactor block structures have to be designed by taking the vibra-tion risks into account. We find two main types of structures:
— isolated tubes or tube bundles as core elements, core support columns or some above-core structures, which are subject to strong parallel, cross- or complex flows; for these the methods described in Section 4.7 are applicable;
— beam or shell type structures which may experience leakage flow instabilities, such as some control rod driveline shroud tubes or pump-diagrid connection devices.
Let us present here some illustrations of vibration studies conducted on various LMFBR concepts.
5.2.1. Core support and subassembly vibration of UK CDFR [3, 79]
The high-pressure plenum of CDFR is shown schematically in Fig. 59. Sodium vertically enters a perforated inlet duct whence it passes radially among the tubes which brace the diagrid and supply coolant to individual subassemblies. It is impor-tant to show that neither the support tubes nor the subassemblies experience any excessive vibration due to cross-flow in the plenum, which may be regarded as a large tube bundle with Re « 106.
Flow patterns have been computed for the plenum by using the PHOENICS program, and the velocity distribution is measured by using a 1/4 scale 360° water model. Flow induced forces are estimated by using these data in combination with basic bundle excitation behaviour obtained from appropriate tests as described in Section 4.7. Simple mechanically and flow induced performance has been measured by employing a test assembly in which a model subassembly was mounted on a support tube to the reactor design. This allowed vibration mode shapes, frequencies and damping to be recorded, along with the resulting amplitude per unit input force.
81

л/
FIG. 59. Cross-flow induced vibration in CDFR high pressure plenum [3].
From these data, it has been possible to compare forcing and response frequencies and to estimate the possible vibration amplitudes for various operating and support conditions.
Vibrations of individual fuel pins within subassemblies have been measured in water tests, as is described in detail in Ref. [79]. It was concluded that vibration should be minimal provided that pins were well supported without excessive clearance (in particular, upstream) and that gross subassembly motion did not occur. Endurance tests have been carried out to provide information on potential pin wear, in some cases using enhanced flow to accelerate any damage [79]. The results have been in line with the observations of individual pin vibration.
5.2.2. Above-core structure of UK CDFR [3]
Figure 60(a) schematically shows the CDFR above-core structure (ACS). The principal feature likely to cause vibration is the deflection of the upward rising flow
82

Fixed d u m m y tubes
I J J V 1 !
Spring bars for tubes
ft д A
l b )
да-i i
Dummies 7 movable tubes
о д CX220 о 5
Core
FIG. 60. (a) Schematic diagram of CDFR above-core structure; (b) model to investigate cross-flow at high Re over control rod shroud tubes.
from the core by a horizontal baffle to pass radially outwards into the hot pool. As a consequence, some control rod shroud tubes (CRSTs) experience strong cross-flow, and the whole structure will be buffeted by fluctuating forces induced by the turning flow. The instrument tubes also are subject to various degrees of cross-flow.
The model sketched in Fig. 60(b) was constructed to investigate cross-flow over tubes at high Re ( = 106) relevant to the CRSTs. Seven tubes were flexibly mounted on bending bars in a rectangular water channel which had dummy tubes in a curved section upstream to generate the high turbulence which must occur above the core. The vibration amplitudes were measured for a range of flow rates and natural frequencies for the seven tubes.
A frequency analysis of the tube vibration amplitudes showed a strong flow dependent peak as well as the lowest natural vibration frequency. The Strouhal number (based on the minimum gap velocity for the normal equilateral triangle geometry) was typically =0 .24 for Re in the range of 105 to 106, for lift forces. The flow dependent peak was strongly present for the lower part of the range for in-line excitation, but faded out in the upper part. Violent resonance occurred in the lift direction when the Strouhal and the natural frequencies were close to each other. Data from these tests are used to assess CRST forces.
A model is being considered for the investigation of overall ACS forces in which the ACS is approximated by a simple cylinder and the CRSTs by plain tubes. The maximum scale would be between about 0.15 and 0.25; it is dictated by the capacity of the available water loops. The simple nature of the model would allow
83

84

easy adaptation to European ACS geometries. The model would be constructed so as to allow changes of basic dimensions and geometry such that the flow features affecting overall forces (i.e. amplitude, frequencies, statistical variation, etc.) can be identified.
5.2.3. Hold Down System of Italian PEC [4, 16]
The functions of the Hold Down System (DBN) of the PEC reactor are:
— to hold down the fuel elements of the core in case of lifting following certain accidents;
— to support the thermocouples and the sodium sampling tubes close to the head of the fuel elements.
As is shown in Figs 61(a) and (b), the DBN consists of twelve structures having the shapes of 'petals'. Each petal is hinged close to the vessel and could be lifted by a suitable actuation mechanism, in order to perform the reactor refuelling. When the petal is in the working position, it leans on a support (close to the hinge) and is pushed down (with controlled load) by the actuation mechanism. There are three different shapes of petals, types А, В, С (Fig. 61(a); they could be grouped into three different configurations: BAB, BCB, ABC).
The primary functions of the Shutdown System are either the safe shutdown of the reactor of the control of the reactivity.
The Safe Shutdown System includes eleven control rod driving mechanisms (MABs); each MAB mainly consists of five parts:
(1) a fixed upper part, containing the actuation mechanism; (2) a fixed guide tube containing the translational bar; (3) a translational bar connecting the actuation mechanism with the control rod; (4) a control rod, hooked to the translational bar, normally contained in the
hexagonal guide box; (5) a hexagonal guide box inserted into the core.
An important experimental study of the dynamic behaviour of petals and guide tube of the MÀB with respect to the vibrations induced by the sodium flow from the fuel elements has been conducted.
The main results obtained are:
— the random process is stationary; — above 250 Hz, there are no significant components; — the vibrations of the models were not significantly affected by the environ-
mental noise; — the support structures of the petals have no significant influence on the petal
vibrations;
85

О 20 40 60 80 100 120 140 160 180 200 220 240
Frequency (Hz)
FIG. 62. Petal acceleration power spectral density [16].
— various natural frequencies of the models were excited by the flow induced excitation, but the vibration levels were not very high;
— the influence of the petals on the flow rates in the fuel elements was very weak; — the petals did not come off their supports; — the startup and shutdown transients did not induce any particular vibrations on
the models;
— the signal of the thermocouples was not significantly affected by the vibrations.
Figure 62 illustrates the observed vibration signatures.
5.2.4. Core fuel elements
Fuel elements may be sensitive structures. Fortunately, they are subject to parallel flow which is a less dangerous source of vibration than transverse flow:
— turbulent excitation is less intense; — instability critical flow velocities are, in general, much higher [73].
However, an experimental study of rods with artificial roughness revealed the importance of roughness for the instability phenomenon and showed that critical velocities lower than those predicted by classical literature data may be obtained [21].
For example, for an artificial roughness of a relative size of 0.075, critical velocities of 6-12 m-s"1 are noted instead of about 100 m-s"1 as predicted by the flutter theory of a smooth tube (Fig. 63).
Tests show no change in the natural frequency of the tube, but a strong evolu-tion of damping with flow velocity (Fig. 64), which could be the signature of a fluid damping controlled instability mechanism.
86

V (m/s)
FIG. 63. Relative amplitudes of bending vibrations of rods against flow rate [21].
V (m/sl
FIG. 64. Relative damping against flow rate.
This kind of behaviour, which may substantially affect fuel element design, should be investigated further.
5.2.5. Instability induced by leákage flows in various connection devices
The main coolant flow paths in the components of a reactor system are often parallel to each other from one plenum region to another. Because of design require-
87

SECTION A - A Upper
FIG. 65. CRBR CRDL shroud tube design [17].
ments related to the need to accommodate differential thermal expansion or compo-nent removal, the flow paths and plenums are seldom completely sealed from each other. As a result, leakage flow across pressure boundaries is not uncommon. When component vibration can interact with and alter (modulate) the leakage flow, the con-ditions for self-excited vibrations and instability are fulfilled.
Many power reactor components have experienced problems attributed to instabilities induced by leakage flow. For example, vibrations appeared on a mock-up which simulated the pump-diagrid connection of the Superphenix reactor. Modifying the shape of the connexion and the stiffness of the shells near the connec-tion allows this problem to be solved. Recently, ANL (US) conducted a design evalu-ation testing of several Clink River Breeder Reactor (CRBR) components that have the potential for leakage flow induced vibration [17]. These included the control rod driveline shroud tubes, flow chimneys, and in-vessel transfer machine port plugs. In carrying out these evaluations, it became obvious that definitive design guidance was lacking. Consequently, a base technology activity was initiated to develop an improved understanding of the mechanism(s) and to contribute to the development of design guides in order to avoid instability.
88

/ / / / / / / / / / / / / / tmtit.tutnt
Upper ' t ube
Lower tube
(a ) I b )
iiiiiiiiiimi
Theor.: 3.4 Hz Exp.: 3.1 Hz
23 Hz 20.3 Hz
FIG. 66. Modal analysis [17].
A particular tube-in-tube slip joint was studied in some detail [80]. The joint was formed by slipping a flexible, cantivelered tube (upper tube) over a relatively rigid inner tube (lower tube) as is illustrated in Fig. 65. The cantilevered tube has three alignment pads on its inner surface at the free end. In general, the design was stable if the flow was from the inside to the outside of the tube, or unstable if the flow was in the reverse direction. In the light of Miller's work [62, 63], this general result was not unexpected. A preliminary parameter study was performed in which insertion length (IL), diametral gap (GS), pad height (PH), and other parameters were varied.
The spatial motion of the upper (flexible) tube was also studied in some detail (Fig. 66); Fig. 67 shows the motion patterns and associated dominant vibration fre-quencies corresponding to various flow rates. As is shown in Fig; 67, the initiation of the unstable motion of the end of the upper tube occurs at almost zero flow in a nearly one-dimensional translation,which is.thepreferred free vibration response of the fun-damental mode. As the flow rate is increased to 1.5 and 2.5 GPM (i.e. gallons per minute), the confining effects of the inner tube cause the end of the tube to orbit in wider elliptic paths. At 4 GPM, just before contact is made with the inner tube, the
89

3.1 Hz
~ 0 gpm
3 . 1 H z -3 .3 . 6.7, 10 Hz
1.5 gpm I l 2.5 gpm 0 3.5, 7.1, 10.6 Hz 3.9 Hz
4 gpm
8 gpm
7 gpm
6.4, 12.8, 19.2 Hz
15 gpm
9.8, 19.5 Hz
- ^ T i T T " 25 gpm
FIG. 67. Unstable motion patterns [17].
orbit is nearly circular. Surprisingly, at 7 GPM a single point of contact is quite repeatable during each cycle, but at 8 GPM another point of contact occurs and the motion consists of precession between the two distinct points of contact. For higher flow rates (e.g. 15 GPM), more points of contact occur during a cycle and the motion becomes chaotic. At all but the lowest ( < 1 . 5 GPM) flow rates cited above, the fluid force can be seen to add (fluid) stiffness to the structure because the fun-damental frequency increases with flow rate. Increases in the negative damping forces also occur because the motion becomes more pronounced with increased flow rate. The non-linear nature of the instability is indicated by two features: (1) at each flow rate, a limit cycle is attained that often is quite repeatable, and (2) super-harmonics of the fundamental frequency of both after impacting. Superharmonics often are associated with the presence of non-linear hardening or softening springs in a structural system.
Most interestingly, when the flow rate was increased (from 15 GPM to 25 GPM) to the point where the second unhinged mode frequency became a superharmonic of the fundamental frequency, the upper tube motion would intermit-tently switch between a first and a second mode shape response. At 25 GPM, when
90

ONLY
О 20 AO 60 80 100 IZO
FLOW RATE, Qpm (0.63 « IO"5mJ-s~'I
FIG. 68. Instability map for top-to-bottom flow where first mode (%) = 0.5, • ; 2.2, V ; 3.3, д ; 6.6, о (solid symbols indicate instability in the second mode: f2 — 21 Hz, f2 = 0.3. Solid line (—) bounds stable regions) [17].
the second mode frequency was the first superharmonic of the fundamental, the switch to the second mode was permanent and very periodic in the preferred free vibration response of the second mode. The switch to the second mode implied that a leakage flow mechanism based on rotation in the slip joint could be activated at sufficiently high flow rates.
To provide a vehicle for an extensive investigation of slip joint designs from the standpoint of instabilities induced by leakage flow, a Leakage Flow Induced Vibration Test Facility was designed and constructed [81]. In the facility, parameter variation capabilities were enhanced: higher flow rates, reversible flow directions, variable damping in the fundamental mode, changeable local slip joint geometries, variable engagement, length, and monitored displacements as the slip joint and the second mode antinode. An in-depth parameter study was undertaken and stability maps similar to that shown in Fig. 68 were developed. As before [80], no instability was observed when a downstream annular constriction was employed. A simple design rule to avoid instability is then to avoid upstream constrictions. When upstream constrictions must be employed, design guidelines are presented for sup-pressing the tendency for unstable motion by limiting the engagement length. The confirmed existence of these leakage flow mechanisms serves as an incentive for careful design of slip joints between telescoping tubes, and as a strong argument for the use of those joints whose behaviour has been researched completely.
91

FIG. 69. Different steps of complete optimization analysis of a tube bundle.
5.3. IHX AND SG SUPPORT CONCEPT
The main requirement consists in designing a fluid elastically stable bundle. The classical way for this is to assume that supports are efficient and to determine their adequate location.
92

FIG. 70. Superphenix IHX bundle concept [8].
Tube support plate
512mm
A.V. Belt
l e / ?
Hot collector
FIG. 71. IHX mock-up: cross-flow velocity profile at the inlet.

However, real supports are not perfect because
— some concepts impose gaps between tube and support (bundles with support plates, for example);
— other designs (bolt systems, clamping devices using screws, etc.) cannot avoid some imperfections that are randomly distributed in the bundle.
We have then to estimate tube-support interactions (see Section 4.7.2), which may strongly decrease the life duration of the component.
Solutions consist in reducing gaps (in general, difficult) or in changing the sup-port design (in general, expensive) or in increasing the support number (pressure drop problems).
Often some local flow velocity profile modification may have a very favoura-ble effect.
The scheme in Fig. 69 summarizes the different steps of the complete optimiza-tion analysis of a tube bundle.
Illustrations
(a) Superphenix IHX [13]
Bundle concept: straight tubes antivibratory belts parallel flow except in inlet and outlet zones (Fig. 70).
An experimental study shows the importance of the localization of the first and last belts (near the inlet and outlet zones) for the velocity profile and, therefore, for the critical conditions. Figure 71 shows that the experimentally observed instability is due to an excessive cross-flow velocity in the second span caused by a wrong loca-tation of the first antivibratory belt.
Table VI shows a comparison between estimates and test results for different belt locations and different bundle configurations (aligned or staggered — inlet or outlet zone).
(b) BN 600 IHX [15]
The BN 600 IHX bundle (Fig. 72) consists of muJtispan tubes which are rigidly fixed at the ends of the tube sheets. The tubes have a 'sinusoidal' bend to compensate for the thermal expansion which induces a transverse flow component.
Each tube has eight lengthwise distributed spacing grids. In the straight sec-tions (for seven grids outside the bend), spacing is achieved by a corrugated band (Fig. 73), limiting the lateral displacement of the tube. In the bend section, spacing is achieved by smooth bands which allow thermal axial movements.
94

TABLE VI. IHX FLUIDELASTIC INSTABILITY TEST VERSUS PREDICTION
Anti-vibratory
belt Configuration
Instability observed
V * max
test (m-s_1) vc
calculated (m-s ') vc
observed
512 mm
Inlet aligned span 1 no 2.8 5.7
512 mm
Inlet aligned span 2 no 2.8 2.1
512 mm
Inlet staggered span 2 yes 2.7 2.2 2.1
512 mm Outlet aligned span 1 no 3.2 7.3 512 mm
Outlet aligned span 2 no 3.2 5.6
512 mm
Outlet staggered span 1 no 2.4 6.8
512 mm
Outlet staggered span 2 no 2.4 5.8
762 mm
Inlet aligned span 1 no 2.6 3.3
762 mm Inlet staggered span 1 no 3.2 3.3
762 mm
Outlet aligned span 1 no 2.9 3.2
762 mm
Outlet staggered span 1 no 3.3 2.6
As in the case of Superphenix IHX, the main transverse flow excitation cornes from the inlet and outlet zones.
A modal analysis and flow induced vibration tests have been conducted on a mock-up. They show no excessive vibratory effect of the support clearances. Life duration tests (4000 h) show small wear, comparable to the initial tube surface rough-ness (Fig. 74).
(c) Superphenix SG [13]
A general view is presented in Fig. 75. The current part of the bundle is con-stituted by helicoidal tubes that are regularly clamped by support devices using
95

FIG. 72. BN 600 IHX bundle [15].
screws. The tubes are quasi-transversally excited by flow. A half-scale mock-up (Fig. 76), which represents the five external spirals, has been built so that the hydroelastic stability of the bundle can be verified and the vibratory signature of one or several loosened screws can be studied. In all cases, the vibration level remains very low and varies regularly with the flow velocity (Fig. 77).
A special experimental analysis has also been performed to specify the vibra-tion risk of the lowest part of the bundle which consists of several dilatation lyre arrays immersed in a recirculation flow volume (Fig. 75). Lyres are very soft and difficult to fix. To avoid instability problems, the flow velocity profile has been modified.
These different illustrations show that flow induced vibration prediction still needs hydroelastic mock-ups, in spite of the great amount of basic theoretical and experimental work done on the subject (see Section 4.7). Certainly the main reason for this is the difficulty of accurately predicting flow velocity profiles in complex bundle geometries.
96

FIG. 73. Spacing of IHX heat exchanging tube [15].
о 30
20
1 , 0
15
10
26
11
Outlet f low
Œ
и i i Lower tube sheet
Inlet f low
Upper tube sheet
FIG. 74. Distribution of wear spots along tube length [15].
97

FIG. 75. Superphenix steam generator [8].
5.4. SECONDARY CIRCUIT PIPES
Pipe design has to attempt to avoid an excessive vibration level:
(a) The parallel flow instability risk must be eliminated. The main sensitive parameters are:
— the distance between the supports, — the pipe wall thickness, and — the flow velocity.
98

External shell
Vessel
INLET
Internal shell
Tube bundle
OUTLET
FIG. 76. Steam generator half-scale model [13].
100
10
0 1
RMS tube displacement - о(цт)
A X
F CJ~V3
У 1
Л' A
JL
E Л
A
Flow velocity ( m / s j
_ i i L .
0 7 1 2 5
FIG. 77. Half-scale steam generator model: tube vibration versus flow velocity.
99

FIG. 78. Typical piping system tested in Japanese laboratory [2].
Generally, the requirements imposed by other forcing functions (seismic, per-manent pressure, sodium-water reaction, etc.) lead to supporting conditions and a pipe thickness corresponding to very high critical flow velocities,
(b) If the instability risk is low, the vibration level due to turbulent excitations can be high. To minimize these vibrations, without too much reducing the mass flow rate, strong flow singularities must be avoided (see Section 4.8.2).
Figure 78 shows a typical piping system tested in a lapanese laboratory. For moderate water flow rates (V = 3.8 m-s - 1) , a very low vibration level was observed.
For a classically designed secondary piping system, we can say that no specific vibration problems appear if the flow velocity is limited to 8 to 10 m-s"1.
5.5. PRIMARY AND SECONDARY PUMPS
Let us first note that, in general, primary pumps are more sensitive than secon-dary ones, because of their longer shaft.
Two designs are considered for primary pumps.
5.5.1. Subcritical design
The nominal rotating speed 0 of the shaft must be lower than the critical speed Qc associated with its first resonance frequency. In general, for large LMFBRs, Q is close to Qc, and a precise prediction of fic is needed.
100

FIG. 79. MALVINA test rig [22].
С о Small sleeve-shaft at rest -< • Small sleeve-shaft rotating I fi Large sleeve-shaft af rest
Calculation
FIG. 80. MALVINA tests: natural frequency versus water level [22].
101

Motor
Tightness seals roller bearing
Shaft
Electrohydraulic actuator T
Hydrostatic bearing
Vessel: ~ 1 . 5 m
Shaft: ~ 0 . 6 m
Shaft: ~ 1 0 m
Total : «-13.8 m
Sleeve
FIG. 81. BRASIMONE test [22].
To validate the theoretical formulation presented in Section 4.9, some tests on reduced scale mock-ups have been conducted. Figure 79 shows the MALVINA test loop where fluid-structure interaction has specially been analysed.
Figure 80 shows the effect of the water level and of the external sleeve diameter on the first resonance frequency and presents a comparison between test results and calculation, using the ROTOR computer program.
Full scale tests have been carried out on BRASIMONE in the sodium test facility (Fig. 81).
Even if the subcritical diameter of the shaft is well respected, some forced vibration problem may appear because of a too pronounced imbalance.
102

Shielding
Level gauge
Piston ring
Upper thermal insulation sheets
Gas box
Lower thermal insulation sheets
Sodium inlet
Pump shaft
Carrying frame
Fit ring
Piston ring
Hydrostatic bearing
Distr ibutor Piston ring
Impeller
FIG. 82. KNK reactor primary pump [23] (lengths in mm).
103

1300-г
R 3 6 10 15 20 25 28 31 7
day 3 6 month 10 year 83
25 28 31 7 10 1 83 84
15 17 19 1 3
84 84
27 3
84
V i b r a t i o n measurements QP2D1 by fu l l power ca 100%
FIG. 83. KNK reactor primary pump vibration measurements [23].
104

For example, one of the Federal German KNK reactor primary pumps (Fig. 82) presented a significant vibration level which tended to increase perma-nently (Fig. 83).
Measurements and control have been carried out on the shaft; they show dimensional discrepancies. A bending of 0.4 mm was found at half-length.
A possible explanation for the continuous increase of vibration includes two facts: residual stresses and thermal creeping in connection with unbalance [23].
5.5.2. Hypercritical design
The nominal rotating speed Í2 may be liigher than the first critical speed Qc. This concept allows the shaft diameter to be reduced for a given length. Some studies are conducted for future LMFBR primary pumps (Example: in SNR II, a 300 mm diameter shaft leads to Í2C = 30% ti).
In this case, the damping phenomena of first natural shaft modes must be predicted accurately. The way to cross the critical speed without any vibration problem strongly depends on the associated damping coefficients.
FIG. 84. MALVINA: influence of water level on maximum vibration level during rotating speed sweep [22], including crossing of the critical speed.
105

For example, some crossing tests have been made on the MALVINA facility. Figure 84 shows the influence of the water level on the maximum vibration level dur-ing the rotating speed sweep [84, 85].
6. MEASUREMENT AND VIBRATIONAL MONITORING
6.1. MOCK-UP CONCEPT
As we have seen in the preceding sections, prediction methods for flow induced vibrations must be confirmed experimentally. Unfortunately, the LMFBR structures are very large and complex. Therefore, experimental confirmation requires reduced scale mock-ups, where not all full scale characteristics can be represented (structural details, temperature conditions, nature of fluid, etc.).
6.1.1. Similitude laws
The first problem consists in knowing how to transpose the phenomena observed and the quantities measured on the mock-up to real structures. In fact, the change of scale creates relative distortions of various phenomena and, if no care is taken, the mock-up behaviour may strongly differ from reality and yield untranspos-able results. In the preceding sections, we have identified some structural and fluid parameters which play an important role in fluidelasticity.
(a) Structural parameters
The stiffness and the mass are functions of the geometry (characteristic length L) and the material (Young's modulus E, Poisson's ratio. v, density ps
[wave velocity c2 = E/pJ). Damping ratios characterize non-conservative forces.
(bj Fluid parameters
The compressibility and the mass are functions of the geometry (L) and the fluid characteristics (density pf, sound velocity cf).
Moreover, permanent flow parameters are very important: the velocity field V, and also certain permanent loadings, in particular, the gravity acceleration g and the surface tension pf (more rarely).
Similitude laws would be obeyed by keeping — between full scale component and mock-up — the ratio between the forces associated with different fluidelastic phenomena.
106

This is never possible. We have, therefore, to choose the ratios to be kept according to the presumed relative importance of the different phenomena.
We see that, just like the analytic approach, also the experimental methodology contains some amount of uncertainty. In fact, analytical and experimental methods are complementary, and, if results of calculations must be confirmed experimentally, experimental results must be interpreted in terms of computer programs.
The first problem to be solved is a geometrical one: Is an exact geometrical representation of the fluid-structure system needed?
In most of the shell problems, the structural stiffness corresponds exclusively to flexion modes. The ratio e/L (e is the shell thickness) may be changed if E is varied.
The most difficult geometrical problem of mock-ups is certainly the account for the little gaps which may play an important role as we have seen for the SG or IHX tube bundles.
In the following considerations, we shall assume that the geometrical similitude to be characterized by the scale factor X will be maintained.
(c) Characteristic dimensionless numbers
The different fluidelastic forces can be dimensionally expressed by using the structural and fluid parameters, mentioned above (the time parameter is character-ized by the pulsation w).
Table VII shows these expressions and also the ratios between them and a reference force which is generally chosen as the inertial force associated with fluid vibration motions or with fluid permanent flow [91].
(a) If we neglect flow effects, the table shows that the pulsation w of the excita-tion forces must retain the dimensionless number E/p{ со2 L2 = (ps/pf)(cs/ojL)2, which may be regarded as the inverse of a Cauchy number. This imposes, if we keep the same material and the same fluid, the condition that ш varies proportionally to the inverse of X. Moreoever, the ratio pjp{ has to be conserved. However, this con-dition is not necessary in the case of thin structures connected to a dense fluid, where structural inertia is negligible. If gravity effects are of importance (sloshing problems), the vibratory Froude number w2L/g must be retained.
The Cauchy-Froude product, E/pfgL, characterizes the ratio between elastic and gravity forces. Its conservation is important (as we shall see in an example). As g is constant, the condition leads to a change of material (E/р{ is proportional to X).
Another general remark concerns the difficulty of taking the dissipation forces (viscosity-sliding effects, etc.) into account. This is not very important if these are weak: the damping ratios measured on the mock-up will not be transposable to real-ity. If they are of the same order of magnitude as the inertial or elastic forces, the similitude must be respected.
107

T A B L E VI I . D I M E N S I O N A L E X P R E S S I O N S F O R T H E D I F F E R E N T
F L U I D E L A S T I C F O R C E S
Fluid inertia
Vibration Flow
S T R и
Inertia Ps<O2L4 Ps
Pf î f r ) '
с T и R E
Stiffness PsC^L2
( - T -\ coL / PF
f i (ELY - 1 Pf V V / с
Inertia (vibration)
P(<O2L4
Compressibility PfCfL 2
( < O L ) = - L
\ V / M 2
F Viscosity T 2 Ц L
M Ц CO
L (vibration)
T 2 Ц L
Pf CO L2 pf V 2
U Inertia (flow)
PfV2L2 ( — ) ' - -V c o L / S 2
I
D Viscosity
fi VL м v M 1
D (flow)
fi VL Pf со2 L3 Pf VL Rj.
Gravity P f g L 3 g
со2 L
gL _ 1
V 2 F
Surface tension a¡ L 2 af 1
Surface tension a¡ L 2
Pf CO2 L2 pf V 2 W
108

For example, the Stokes number pi/pf wL2 must be kept in pump bearing problems.
(b) If we now consider flow effects, the ratio between both inertial forces has to be conserved; it is represented by the-Strouhal number S = coL/V.
For example, if the same material and the same fluid are used, the nominal flow velocity V must be conserved.
This rule is often called 'velocity similitude'. It allows the ratio between flow and fluid-structure system characteristic frequency ranges to be kept.
However, velocity similitude is justified if the other effects are small, in partic-ular, the fluid viscosity effect characterized by the Reynolds number pf VL/¡x, the compressibility effect described by the Mach number V/cf, and also gravity and sur-face tension effects characterized by the Froude number V2/gL and the Weber num-ber р{ V 2 / O f .
In the majority of industrial cases, a certain distortion of these characteristic numbers is admissible.
Let us finally note that it may be dangerous to complicate the concept of a mock-up in order to be able to obey some similitude rules; for example, the introduc-tion of added masses the fixation of which is not well controlled, or the use of not well known materials, must be avoided.
6.1.2. Example: mock-up concept for weir instability studies
In Section 4.6, we have presented the weir instability which was observed on Superphenix LMFBR. To understand this phenomenon and to confirm the modelling described in Section 4.6, several mock-ups have been built in French CEA and EdF [18, 20].
What similitude laws had to be chosen? The modelling suggested that the main parameter was the ratio between gravity
and elastic forces due to weir flexibility. This parameter has been identified as the product of a Cauchy and a Froude number: E/pfgL. If we consider the ratio 0 g
between the resonance frequency fg of the first sloshing mode and the resonance frequency fs of the first fluid-structure coupled mode of the weir, we have:
- f g P i § L
f.
The conservation of Í2g imposes the condition that f s varies as X 'A (X is the scale factor) ánd the weir stiffness К as X2 (if the fluid density pf does not change1).
1 Note that hot sodium and cold water have about the same p¡.
109

FIG. 85(a). LDP mock-up design, showing plane geometry.
FIG. 85(b). LDC mock-up design, showing cylindrical geometry.

TABLE Vin. MOCK-UP CHARACTERISTICS COMPARED WITH SUPERPHENIX
Scale factor
Width of weir shell hc (mm)
Material fi g.max hmax
SPX1 1 hc SPX steel 0.48
2 steel 0.54 —
LDF - 1 / 1 0 2 aluminium
2 aluminium 0.19 1 1 LDC 1/12 1.5 aluminium 0.25 10
1 aluminium 0.36 9
2 PVC > 1 1 6-11 EPOC 1/4
2 aluminium 0.28 8 - 9
If weir geometrical similitude is taken into account, a softer material is needed: E ~ X. On the basis of these requests, the EPOC mock-up has been designed. The LDP and LDC mock-up designs only try to take into account the global weir stiffness K. LDP has a plane geometry (Fig. 85(a)). LDS is cylindrical, and the weir thick-ness can be varied (Fig. 85(b)). Table VIII shows the characteristics of these three mock-ups as compared with Superphenix. It appears that the different configurations tested cover a rather large domain of Í2g around the Superphenix value. The difficulty of exactly reproducing fig is connected with the difficulty of taking into account the boundary conditions of the weir which, in the real structure, depend on the whole internal shell system (not represented in the mock-ups).
We note that the results of the mock-ups (for example: stability diagrams in flow rate/fall height co-ordinates) are not directly transposable to reality because the parameters governing energy dissipation are not well scaled.
In the present problem, a lot of parameters may be relevant:
— the hydraulic Froude number (which here characterizes the mean flow velocity effects),
— the Reynolds number, — and other parameters describing structural damping.
I l l

6.2. ON-SITE MEASUREMENTS
There are roughly two types of on-site measurement:
(a) Measurements during preliminary starting tests which can be done at various thermohydraulic conditions. During these tests, the instrumentation must be resistant to a high temperature and sodium environment but its lifetime may be short.
(b) Measurements associated with in-service monitoring. The instrumentation is then subject to more severe conditions: its lifetime must be long in spite of the added effect of radiation.
In fact, classical transducers (as accelerometers, strain gauges, displacement transducers) are of no use; special (and very expensive) devices are needed such as strain gauges installed in the Superphenix internal reactor structure. Anyway, satis-factory operation of the internal instrumentation cannot be ensured during the whole lifetime of the reactor, given the actual state of technology. Therefore, complemen-tary instrumentation must be used such as
— more classical sensors located on the external structures (external vessel, outlet pipes, upper parts of control rods or pumps, etc.). The problem is then to correlate their signature with the motions of the internal structures.
Frequency (Hzl
FIG. 86. Identification of the neutron noise fluctuation and external vessel acceleration, the power spectral densities and the sum characteristics of the internal PWR structural motions [89].
112

- 5 0
- 6 0
E <
10
1 0 " '
10
10
10"
- 6
Group 1
5 6 7
Frequency (Hz)
(b)
1 r-Hz 8
FIG. 87. Typical transfer functions on (a) toroidal redan shroud; (b) conical redan shroud.
113

( a )
—
—1 j } ' >— 1 1 ' 1 ^
-81 1——i—•—. 1—,—i——i 1——ц—.—i 1 L_
0 2 4 6 8 10 12 14 16 18 20
sin coeff ic ient
toroidal redan mode shape.
114

— Neutron noise transducers which are sensitive to fluid sheet thickness varia-tions and, then, indirectly to internal motions. This type of measurement is more used in PWR monitoring, and detailed studies have been carried out to correlate neutron noise fluctuations, external vessel accelerometers and internal motions (thermal shield and core barrel) [88-90]. Figure 86. illustrates this point.
The characteristics of LMFBRs are much more complex, and the correlation is more difficult. Moreover, the positions of neutron noise transducers are less favourable than in PWRs.
As we have said in Section 4.5.2, a complete in-air analysis of the Superphenix internal structure has been conducted, using electrodynamic actuators and accelerometers. Each resonance mode in the 0 to 10 Hz domain has been studied.
Figures 87 and 88 show examples of measured transfer functions and typical three-dimensional mode shapes.
This type of experimental characterization connected with the in-sodium calcu-lation (see Section 4.5.4) is the only method of making in-sérvice diagnostics possible.
6.3. DATA TREATMENT
The preceding sections dealt with two types of experiment:
(a) Artificial excitation tests using hydraulic or electrodynamic actuators, used to measure the modal parameters of the coupled fluid-structure system (resonance frequencies, modal damping coefficients and mode shapes).
(b) Flow induced vibration tests which can also provide information on modal characteristics but which essentially allow source data to be derived from structural response analysis.
Type (a) tests can be conducted by using several excitation techniques: sine sweeping, white noise excitation, transients (shocks, truncated noises, etc.). One or several actuators located at different points of the structure can also be used.
With each excitation technique a particular data treatment is associated in order to identify transfer functions in terms of modal parameters.
Transfer function identification has recently made great progress: In particular, numerical algorithms are available in order to separate very
closed resonances, to correct the effects of weak non-linear behaviour of the tested structure, etc.
From type (b) tests, it is more difficult to derive modal characteristics because the source is unknown. The analysis of the PSD of the response is, however, gener-ally the only way of achieving an estimate of the damping coeffficients of the flow-structure coupled system.
115

The better the modal feature of the associated conservative system is known (by using calculation or transfer function analysis without flow), the better is this estimate. The same remark applies to source characteristics determination from this type of test.
In fact, even if the transfer functions are perfectly known, it is difficult to derive fluctuating flow excitation sources, PSD and correlation lengths from a limited number of response transducers.
The analysis of each resonance peak leads to an estimate of the PSD of the generalized force associated with the 'turbulent' pressure field in the vicinity of the resonance frequency (see Eq. (15)). From this, a single model of excitation sources can be built (for example, a mean PSD and correlation length can be adjusted).
This model can be refined if several experiments are carried out by varying the flow rate and, in particular, if direct turbulent pressure fluctuation measurements are possible at some points of the fluid domain. It should be noted that this last meas-urement is not evident because fluctuating pressure is always the superposition of a turbulent fluctuation (source) and a fluidelastic fluctuation (response of the system). For example, the PSD values of Fig. 18, used for the Superphenix vibration calcula-tion, have been obtained by using this kind of technique (see Section 4.3.2).
6.4. IN-SERVICE VIBRATIONAL DIAGNOSTICS
The aim of the permanent vibratory instrumentation of LMFBRs is the control of its good mechanical behaviour during reactor life.
The different preliminary steps of vibration analysis:
— modal calculations and excitation source evaluation; — mock-up results; and — on-site measurements during starting tests
provide general knowledge of the initial state of the reactor structures. The principle of in-service monitoring consists of comparisons between this
initial state and the vibration signatures noticed during periodic recordings. Generally, this comparison is carried out for typical characteristics of the sig-
nal power spectral densities:
— first resonance frequencies; — resonance damping factors; — vibration level.
Often a decrease in the resonance frequency and an increase in damping are the signature of a degradation of certain mechanical connections.
116

Frequency (Hz)
FIG. 89. Neutron noise DSP [90].
10 20 0 10 20 0 10 20
0.5-
10 20 0 10 20 0
Frequency (Hz)
10 20
FIG. 90. Identification of abnormal vibration of a PHENIX control rod by analysing the coherence junctions between control rod accelerometers and neutron noise transducers [90].
117

For pumps, an increase in the vibration levels due to a larger imbalance also characterizes mechanical degradation.
An example for the importance of vibrational monitoring is given by the detection of abnormal vibration of a PHENIX control rod [90]. The in-air tests of this reactor allowed the resonance frequencies of the central rods to be characterized and a surveillance system based on external accelerometers placed on the rod casing to be adapted. The first mode ( ~ 1 Hz) was very well detected during a test using an external vibration actuator. At the beginning of the fourth cycle of the plant, a peak of 1 Hz appeared on neutron noise DSP (Fig. 89). The determination of the coherence functions between control rod accelerometers and neutron noise trans-ducers allowed the defect to be localized (rod 4 in Fig. 90). The guide sleeve of the rod was replaced during the normal handling period of the reactor, which certainly prevented severer troubles from arising.
7. CONCLUSIONS AND RECOMMENDATIONS
During the last few years, important work has been performed in the field of flow induced vibration prediction.
Improved methods have been developed concerning:
— the modal numerical calculation using finite element codes including fluid-structure interaction, substructuring analysis, etc;
— the knowledge of excitation of fluctuating pressure fields due to flow singularities;
— the prediction of fluidelastic instability risks; — the experimental techniques (mock-up concept, measurement and data
treatments).
In terms of technology transfer, the practice of dynamic finite element calcula-tion tends to be generalized. Codes working on microcomputers exist.
Analysis procedures based on substructuring techniques are starting to be available. They can mix calculation and experimental modal data. These latter data are deduced from transducer signals using special 'transfer function analysis'.
However, fluid-structure interaction and random excitation are more rarely to be found among the possibilities of current numerical tools.
Finally, design specialists are better informed on fluidelastic instability risks. For example, H.E. tube bundle supports are classically designed by using fluidelastic criteria.
As far as the safety aspect of flow induced vibrations is concerned, we have emphasized the importance of accurate risk prediction.
118

For this purpose, the actually existing techniques still need some improvement:
— In the domain of modal computing methods, very efficient codes are already available. However, the effect of some detailed modelling will have to be specified (in particular, 3-D fluid communications or 3-D connection of shells).
— Basic physics tests are required to characterize the fluctuating pressure fields (power spectral density, correlation lengths, etc.) in typical FBR geometries, to understand the damping mechanisms and to try to find out the potentially unstable flow-structure configurations.
— Computer methods can also be developed to predict the flow patterns and, if possible, the fluctuation characteristics (with or without wall vibrations!).
In the particular field of the flow reduced vibrations (FIV) of tube bundles, R&D effort must be continued, especially by developing non-linear modellings to predict impact and sliding forces and durations. This information will lead to an accurate prediction of the lifetime of bundles (wear and fatigue).
Additional wear tests have also to be carried out for typical FBR material and environment.
Finally, it is of practical interest to obtain better knowledge of the statistical characteristics of tube support gaps and contact forces in real steam generators or heat exchanger bundles.
As far as pump vibration and critical velocity prediction are concerned, tests and calculation methods are needed to obtain more detailed knowledge of some particular effects such as
— labyrinth effects, — free surface effects,
— coupling between shaft vibration and rotating flow, etc.
Finally, we recommend:
— carrying out basic physic tests, — development of associated computer methods, — and performing in-service measurements on existing plants to validate the
prediction methods. The results of such studies should lead to 'anti-FIV' rules for the design.
119

REFERENCES
[1] GIBERT, R.J., Vibrations des structures. Interaction avec les fluides. Excitations aléatoires, Eyrolles, Paris (to be published).
IAEA Specialists Meeting on Flow Induced Vibrations in Fast Breeder Reactors (Paris, October 1986)
[2] TANAKA, N., "CRIEPI's research activities on fluid-structure interaction. Current status and future planning".
[3] COLLINSON, A.E., "Flow induced vibration in LMFBRs (UK programme)". [4] CORNAGGIA, L., MARTELLI, A., REALE, M., ZAMBELLI, M., "Analysis of
flow induced vibrations in the PEC design". [5] WAMBSGANSS, M.W., CHEN, S.S., MULCAHY, T.M., JENDRZEJCZYK, J.A.,
"US LMFBR flow induced vibration program (77-86)". [6] RANGETTE, A., SCHMIDT, H., "Activities on flow induced vibration within the
FRG fast reactor program. Current status and future planning". [7] KOKOREV, B.V., SINYAVSKIJ, V.F., FEDOTOVSKIJ, V.S., YUREV, Y.O.S.,
TITOV, V.F., FEODOROV, V.G., "Flow induced vibration of LMFBR equipment elements. Measurements and calculation method development".
. [8] LIVOLANT, M., GIBERT. R.I., AXISA, F., "French flow induced vibration studies for fast breeder reactors".
[9] SOMAN, Y., "Development of 3-D fluid-structure interaction analysis code for FBR".
[10] AIT A, S., BERTAUT, C., HAMON, R., "3-D fluid-structure calculation of LMFBR internals by a substructure method".
[11] FEDOTOVSKIJ, V.S., SINYAVSKIJ, V.F., TERENIK, L.V., SPIROV, V.S., KOKOREV, B.V., "Dynamic characteristics of heterogeneous media in vibrational and wave processes".
[12] CHEN, J.S., JENDRZEJCZYK, J.A., WAMBSGANSS, M.W., "Fluidelastic insta-bility in tube bundle".
[13] AXISA, F., "Review of the flow induced vibration French studies in LMFBR inter-mediate heat exchanger and steam generator tube bundle".
[ 14] GOYDER, H.G. D., "Vibration and wear of loosely supported heat exchanger tubes' '. [15] ZHUKOV, K.V., TATARSKIJ, Y.N., "Design and experimental substantiation of
LMFBR IHX vibrostrength". [16] GASTOLDI, A., MACARTI, M., ZOLA, M., "Flow induced vibration experimental
analysis of the holddown and shutdown system of the PEC fast reactor". [17] WAMBSGANSS, M.W., "Instabilities induced by leakage flow". [18] AIT A, S., GIBERT, R.J., VERRIERE, Ph., BERTAUT, C., LACROIX, С.,
D'ONGHIA, E., "Weir fluidelastic instability of LMFBR internals — discovery and experimental observations".
[19] AIT A, S., GIBERT, R.J., "Weir fluidelastic instability of LMFBR internals — theoret-ical model".
120

[20] LACROIX, С., VIOLLET, P.L., "Hydro-elastic study of instability of the cooling cir-cuit of SUPERPHENIX".
[21] FEDOTOVSKIJ, V.S., SPIROV, V.S., SINYAVSKIJ, V.F., TERENIK, L.V., "Flut-ter of rods with artificial roughness".
[22] AXISA, F., "Vibrations of the shafts of the primary pumps". [23] ZIMMERMANN, G., "Induced vibrations in pumps".
Computing methods — mostly Symposia on Mechanics in Reactor Technology 1983 and 1985 (SMIRT1983 and SM1RT1985)
[24] MEYER, D., GRAND, D., "Thermal-hydraulic study of the hot plenum of the LMFBR 1500",' Nat. Heat Transfer (Conf. Pittsburg, Aug. 1987).
[25] OHAYON, R., VALID, R., "Symmetric primal-dual variational formulations of cou-pled dynamic systems: three-dimensional elasticity, shells, fluid-structure problems", Office national d'études et de recherches aérospatiales, 29 av. de la Division Leclerc, F-92320 Chatillon, France (SMIRT 1983), p. В 1/1.
[26] LIU, W.K. (Department of Mechanical and Nuclear Engineering), BELYTSCHKO, T.B. (Department of Civil Engineering), "Fluid-structure interaction with sloshing", The Technological Institute, Northwestern University, Evanston, Illinois 60201, USA (SMIRT 1983), p. В 1/2.
[27] YU, I.W. (Westinghouse Electric Corporation, R&D Center, 1310 Beulah Road, Pittsburgh, Pennsylvania 15235, USA), "Solution of pressure-displacement systems for fluid-structure interaction problems (SMIRT 1983), p. В 1/3.
[28] NEISHLOS, H. (National Institute for Aeronautics and Systems Technology, Council for Scientific and Industrial Research, P.O. Box 395, Pretoria 0001, South Africa), "Weak fluid compressibility in fluid-structure interaction problems" (SMIRT 1983), p. В 1/4.
[29] BRUSA, L., GRECO, A., GURIZZAN, A. (S.p.A., C.P. 12081, 1-20134, Milano, Italy), "Reduction methods for vibration analysis of fluid-structure systems (SMIRT 1983), p. В 1/5.
[30] GUILBAUD, D., GANTENBEIN, F., GIBERT, R.J. (Commissariat à l'énergie ato-mique, CEN Saclay, DEMT, F-91191, Gif-sur-Yvette Cedex, France), "A substruc-ture method to compute the 3-D fluid-structure interaction during blowdown (SMIRT 1983), p. В 1/6.
[31] BENNER, J. (Institut fiir Reaktorentwicklung, Kernforschungszentrum Karlsruhe GmbH, Postfach 3640, D-7500 Karlsruhe, Federal Republic of Germany), "Three-dimensional interaction of fluid and vessel internal structures in a PWR" (SMIRT 1983), p. В 8/4.
[32] EBERLE, F., HAILFINGER, G., KADLEC, J. (Institut für Reaktorentwicklung, Kernforschungszentrum Karlsruhe GmbH, Postfach 3640, D-7500 Karlsruhe, Fed. Rep. of Germany), "Eigenoscillations of a horizontal cylindrical shell partly filled with water" (SMIRT 1983), p. В 8/5.
121

[33] DOSTAL, M. (National Nuclear Corporation Ltd., Risley, Warrington WA3 6BZ, U.K.); DESCLEVE, P. (NOVATOME, 20 av. E. Herriot, F-92350 Le Plessis-Robinson, France); GANTENBEIN, F. (Commissariat à l'énergie atomique, CEN Saclay, F-91191, Gif-sur-Yvette Cedex, France); LAZZERI, L. (Ansaldo Impianti S.p.A., ViaG. D'Annunzio, 113,1-16121 Genova, Italy), "Benchmark calculations on fluid coupled co-axial cylinders typical of LMFBR structures" (SMIRT 1983), p. В 8 / 6 .
[34] LAZZERI, L., CECCONI, S., SCALA, M. (Ansaldo Impiariti S.p.A., Via G. D'An-nunzio, 113, 1-16121 Genova, Italy), "Generalized added masses computation for fluid-structure interaction" (SMIRT 1983), p. В 8/7.
[35] THOMAS, P., KOPFF, P. (Electricité de France, Département machines et structures, 1 av. du Général de Gaulle, F-92141 Clamart, France), "Mechanical and fluid coupling of plates and cylinders" (SMIRT 1983), p. В 8/8.
[36] GUILBAUD, D., GIBERT, R.J. (C.E.A., CEN Saclay, DEMT, F-91191, Gif-sur-Yvette Cedex, France). "Calculation of an HDR blowdown test using a substructure method" (SMIRT 1985), p. В 10/1.
[37] DU, Ruiming (Institute of Engineering Mechanics, State Seismological Bureau of China, Harbin, China); WILSON, E.L. (University of California, Dept. of Civil Engineering, Berkeley, California 94720, USA), "An effective modified Ritz vector direct superposition method" (SMIRT 1985), p. В 10/2.
[38] KHATUA, T.P. (NUTECH Engineers, Inc., 145 Martinvale Lane, San José, Califor-nia 95119, USA), "Structural reanalysis using eigenvalue modification technique" (SMIRT 1985), p. В 10/3.
[39] GOODMAN, J., (Bechtel Power corporation, 12400 E. Imperial Highway, Norwalk, California 90650, USA), "Substitutional method in structural mechanics" (SMIRT 1985), p. В 10/4.
[40] LEIMBACH, K.R. (Haverkampstr. 12, D-4630 Bochum, Federal Republic of Ger-many); KRUTZIK, N.J. (Kraftwerk Union AG, Abt. R621, Berliner Str. 295-299, D-6050 Offenbach/Main, Federal Republic of Germany), "Nuclear plant subsystem dynamic structural analysis by partially diagonalized modal coupling" (SMIRT 1985), p. В 10/5.
[41] NORDMANN, R., (Universitat Kaiserslautern, Fachbereich Maschinenwesen, Post-fach 3049, D-6750 Kaiserslautern, Federal Republic of Germany); STEINWENDER, F. (Kraftwerk Union AG, Abt. R622, Postfach 962, D-6050 Offenbach/Main, Federal Republic of Germany), "Fitting of a piping support finite element model by means of measured modal parameters" (SMIRT 1985), p. В 10/6.
[42] LAU, W.W. (Babcock Power Ltd., 165 Great Dover Street, London SE1 4YB, UK), "Simplified dynamic response calculations for the design of complex structures and components" (SMIRT 1985), p. В 10/7.
[43] ROBINSON, A.R., SANTANA, G. (University of Illinois at Urbana-Champaign, Dept. of Civil Engineering, 208 N. Romine Str., Urbana, Illinois 61801, USA), "Dynamic properties of modified systems" (SMIRT 1985), p. В 10/8.
[44] ISHTEV, K.G. (V.I. Lenin High Electromechanic Institute, Durvenica, Dept. Auto-matics and Telematics, Sofia, Bulgaria); BONEV, Z. (Higher Institute for Civil Engineering and Architecture, Dept. of Structural Mechanics, Í Hristo Smirnensky str.,
122

Sofia 1421, Bulgaria); PHILIPOV, P. (6 Leonardo da Vinci str., Sofia 1504, Bulgaria); "Linear mechanical modelling using dynamical condensation" (SMIRT 1985), p. В 10/9.
[45] ZIENKIEWICZ, O.C., BETTESS, P., "Fluid-structure interaction" (Symp. Ocean Structural Dynamics 1982, Sept. 8-10, Oregon State University, Corvallis, Oregon, 1982) Oregon State University Publishing (1983).
[46] VALID, R., OHAYON, R., BERGER, H., "Le calcul des réservoirs élastiques par-tiellement remplis de liquide pour la prévision de l'effet Pogo", 23rd Int. Astr. Fed. Congress, Vienna, Austria, ,5-8 Oct. 1972, Rapport technique de l'office national d'études et recherches aéronautiques, France, 1154 (TP-ONERA 1154, 1974), La Recherche Aérospatiale (1974) 367.
[47] OHAYON, R., VALID, R., "True symmetric formulations of free vibrations of fluid-structure interaction, applications and extensions", Int. Conf. Numer. Methods for Coupled Problems, University of Swansea (UK) (to appear as a chapter of a book, Numerical Methods for Coupled Problems (LEWIS, R.W., HINTON, E., BETTESS, P., Eds), Wiley, New York (1983).
Boundary element methods
[48] ACHENBACH, J.D., Wave Propagation in Elastic Solids, North-Holland/American Elsevier, New York (1975).
[49] ATKINSON, K.E., A survey of numerical methods for the solution of Fredholm integral equations of the second kind, SIAM, Philadelphia, Pa. (1976).
[50] BREBBIA, C.A., WALKER, S., Boundary Element Techniques in Engineering, But-terworth, London (1988).
[51] DELVES, L.M., WALSH, J., Numerical Solution of Integral Equations, Clarendon Press, Oxford (1974).
[52] KOBAYASHI, S., "Fundamentals of boundary integral methods in elastodynamics", Ch. 1 in Topics in Boundary Element Research, Vol. 2 (BREBBIA, C.A., Ed.), Springer-Verlag, Berlin (West) (1985).
[53] SHAW, R.P., Integral equation formulation of dynamic acoustic fluid-elastic solid interaction problems, J. Acoust. Soc. Am. V 53 (1973) 514.
[54] SHAW, R.P., Time dependent acoustic radiation from a submerged elastic shell defined by nonconcentric circular cylinders, J. Acoust. Soc. Am. 64 (1978) 311.
[55] Boundary Element Research, Vol. 2, Time Dependent and Vibration Problems (BREBBIA, C.A., Ed.), Springer-Verlag, New York (1985).
Computer codes
[56] BRUSA, L., CIACCI, R., GRECO, A. (CISE S.p.A., C.P. 12081, 1-21034 Milano, Italy), 'ZERO-2 — a general purpose computer program for fluid-structure interaction problems" (SMIRT 1983), p. В 9/7.
[57] FARVACQUE, M., GUILBAUD, D., GANTENBEIN, F., GIBERT, R.J., (CEA, CEN Saclay, DEMT, F-91191 Gif-sur-Yvette Cedex, France, "OSCAR — a new com-puter code for the dynamic analysis by substructuration" (SMIRT 1985), p. В 8/3.
123

[58] EVERSTINE, G.C., HENDERSON, F.M., SCHROEDER, E.A., LIPMAN, R.R., "A general low frequency acoustic radiation capability for NASTRAN" (14th NAS-TRAN Users Colloquium, NASA CP-2419, NASA, Washington, D.C. (1986)) 293.
Damping
[59] CHIBA, T. (Nuclear Power Division, Ishikawajima-Harima Heavy Industries Co. Ltd., 1, Shin-nakahara-cho, Isogo-ku, Yokohama 235, Japan); KOBAYASHI, N. (Ishikawajima-Harima Heavy Industries Co. Ltd., Research Institute, Kohtoh-ku, Tokyo 135, Japan), "A comparison of experimental and theoretical vibration results for fluid-coupled, co-axial cylinder" (SMIRT 1983), p. В 8/9.
[60] CEPKAUSKAS, M.M., KENNY, R.A., SULLIVAN, J.P. (Combustion Engineering, Inc., C-E Power Systems, 1000 Prospect Hill Road, Windsor, Connecticut 06095, USA), "Response of a two-degrees-of-freedom spring mass with fluid coupling" (SMIRT 1983), p. В 8/10.
[61] KUZELKA. V. (National Research Institute for Machine Design, SVUSS, 25097 Praha 9-Bechovice, Czechoslovakia); NEUMAN, F. (Federal Ministry for Technical Invest-ment and Development, FMTIR, Slezka 9, 12029 Praha 2, Czechoslovakia; PECINKA, L. (Power Engineering Works, SKODA, 31600 Plzén-Bolevec, Czechos-lovakia), "The influence of thickness and viscosity of liquid annular layer on dynamic behaviour of cylindrical shell (SMIRT 1983), p. В 8/11.
[62] MILLER, D.R., "Generation of positive and negative damping with a flow restrictor in axial flow" (Proc. Conf. Flow-Induced Vibrations in Reactor System Components, 1970), ANL-7685, Argonne National Laboratory (May 1970) 304.
[63] MILLER, D.R. , KENNISON, R.G., "Theoretical analysis of flow-induced vibration of a blade suspended in channel flow, American Society of Mechanical Engineers (ASME), Winter Annual Meeting, New York, paper 66-WA/NE-l (1966).
Tube bundles in cross-flow
[64] CONNORS, H.J., "Fluidelastic vibration of tube arrays excited by cross-flow", ASME Meeting (December 1970).
[65] PETTIGREW, M.J., SYLVESTER, Y., CAMPAGNA, A.O., "Flow-induced vibra-tion analysis of heat exchanger and steam generator designs" (SMIRT, 1977).
[66] PAIDOUSSIS, M.P., Fluidelastic vibration of cylinder arrays in axial and cross-flow: state of the art, J. Sound Vibr. (1981) 76, 329, 360.
[67] CHEN, S.S., "The instability flow velocity of tube arrays in cross-flow" (Int. Conf. Flow Induced Vibration in Fluid Engineering, September 1982).
[68] GIBERT, R.J., SAGNER, M., DOYEN, R., "Vibration of tube arrays in transversal flow" (SMIRT Paris, 1981).
[69] TANAKA, H., TAKAHARA, S., OHTA, K., "Flow induced vibration of tube arrays with various pitch to diameter ratios", Flow-Induced Vibration of Circular Cylindrical Structures, ASME (1982).
124

[70] CHEN, S.S., "Vibration of a group of circular cylinders subjected to fluid flow", in Flow Induced Vibration Design Guidelines (CHEN, P.Y., Ed.), ASME PVP-Vol. 52 (1981) 75.
[71] CHEN, S.S., Instability of circular cylinder arrays in cross flow; Shock and Vibration Digest 15 7 (July 1983) 17.
Cylindrical structures in axial flow
[72] PAIDOUSSIS, M.P., DENISE, J.P., Flutter of thin cylindrical shells conveying fluid, J. Sound Vibr. 20 (1972) 9.
[73] PAIDOUSSIS, M.P., Dynamics of cylindrical structures subjected to axial flow, J. Sound Vibr. 29 (1973) 365.
[74] PAIDOUSSIS, M.P., OSTOJA-STARZEWSKI, M., Dynamics of a flexible cylinder in subsonic axial flow, AEAA J. 19 (1981) 1467.
[75] PAIDOUSSIS, M.P., The dynamical behaviour of cylindrical structures in axial flow, Ann. Nucl. Sci. Eng. 1 (1974) 83.
[76] CURLING, L.R., GAGNAN, J.O., "A theoretical model for vibration analysis of cylinders in axial flow" (Proc. Symp. Flow-Induced Vibrations), ASME (1984).
[77] WEAVER, D.S., UNNY, Т.Е., ' 'On the dynamic stability of fluid conveying pipes' ', ASME (1973).
[78] WEAVER, D.S., MYKLATUN, В., On the stability of thin pipes with an internal flow, J. Sound Vibr. 31 (1973) 399.
Instabilities
[79] COLLINSON, A.E., WINN, W.R., "Measurement of LMFBR fuel pin vibration in water for pins with and without positive end support", Third Vibration Session in Nuclear Plant Conference, Keswick, May 1982, paper 6.3.
[80] MULCAHY, T.M., "Leakage-flow-induced vibration of a tube-in-tube slip joint" (Proc. Symp. Flow-Induced Vibrations), Vol. 4, Vibration Induced by Axial and Annu-lar Flows (PAIDOUSSIS, M.P., AU-YANG, M.K., Eds), ASME (1984).
[81] MULCAHY, T.M., "Avoiding leakage flow-induced vibration by a tube-in-tube slip joint", Fluid-Structure Interaction and Aerodynamic Damping, ASME, New York (1985) 159.
Shaft bearings
[82] AXISA, F., GENUINI, X., GIBERT, R. J., Vibration des arbres de machine tournante: description des phénomènes physiques mis enjeu, Rep. CEA-N-2305.
[83] KANGKO, S., HAYAMA, S., On free surface oscillations of a liquid partially filling a rotating cylinder, ASME Bull. 26 (1983) 221.
[84] BOTMAN, M., SAMAHA, M.A., Experiments on the dynamic behaviour of a super-critical rotor, ASME J. Mech. Design (Dec. 1959).
[85] SAKATA, M., ENDO, M., KISHIMOTO, K., Secondary critical speed of flexible rotors with inertia slots, J. Sound Vibr. 41 (1981) 61.
125

[86] ROHDE, S.M., EZZAT, H.A., On the dynamic behaviour of hybrid journal bearings ASME J. Lubrication Technol. (Jan. 76).
[87] BIREMBAUT, Y., Raideur et amortissement des paliers hydrodynamiques, Mémoire Technique du CETIM (Centre d'études techniques des industries mécaniques, France), 32 (Dec. 1977).
[88] ASSEDO, R., DUBOURG, M., EPSTEIN, A., "Vibration behaviour of IWR reactor internals, modal experiments and analysis" (SMIRT, 1975).
[89] CARRE, J.C., GIBERT, R.J., JEANPIERRE, F., ASSEDO, R., "PWR internal vibrational mode shapes, calculation and tests" (Proc. Meeting Reactor Noises, Gatlin-burg, 1977), Progr. Nucl. Energy 1-2-4 (1977) 353.
[90] BRILLON, A., PUYAL, C., CARRE, J.C., TIGEOT, Y., Surveillance du comporte-ment vibratoire des composants du circuit primaire, Rep. IAEA-SM-226170 (1978).
[91] SCANLAN, P.R.H., "Dynamic similitude in models", CEA-EDF, Cycle de confér-ences sur l'aéro-hydro-élasticité, Ermenonville (1972).
[92] GIBERT, R.J., MARTELLI, A., Seismic Analysis of LMFBR (in preparation).
126

HOW TO ORDER IAEA PUBLICATIONS An exclusive sales agent for IAEA publications, to whom all orders
and inquiries should be addressed, has been appointed in the following country:
UNITED STATES OF A M E R I C A UNIPUB, 4611-F Assembly Drive, Lanham, MD 20706-4391
In the following countries IAEA publications may be purchased from the sales agents or booksellers listed or through major local booksellers. Payment can be made in local currency or with UNESCO coupons.
A R G E N T I N A
A U S T R A L I A BELGIUM
CHILE
CHINA
CZECHOSLOVAKIA
FRANCE
HUNGARY
INDIA
ISRAEL
ITALY
JAPAN PAKISTAN
POLAND
R O M A N I A SOUTH A F R I C A
SPAIN
SWEDEN
U N I T E D K INGDOM
USSR YUGOSLAVIA
Comisión Nacional de Energía Atómica, Avenida del Libertador 8250, RA-1429 Buenos Aires Hunter Publications, 58 A Gipps Street, Coll ingwood, Victoria 3066 Service Courrier UNESCO, 202, Avenue du Roi, B-1060 Brussels Comisión Chilena de Energía Nuclear, Venta de Publicaciones, Amunategui 95, Casilla 188-D, Santiago IAEA Publications in Chinese: China Nuclear Energy Industry Corporation,Translation Section, P.O. Box 2103, Beijing IAEA Publications other than in Chinese: China National Publications Import & Export Corporation, Deutsche Abteilung, P.O. Box 88, Beijing S.N.T.L., Mikulandska 4.CS-11686 Prague 1 Alfa, Publishers, Hurbanovo námestie 3, CS-815 89 Bratislava Office International de Documentation et Librair ie,48, rue Gay-Lussac, F-75240 Paris Cedex 05 Kultura, Hungarian Foreign Trading Company, P.O. Box 149, H-1389 Budapest 62 Oxford Book and Stationery Co., 17, Park Street, Calcutta-700 016 Oxford Book and Stationery Co.,Scindia House, New Delhi-110 001 Heiliger & Co. Ltd. 23 Keren Hayesod Street, Jerusalem 94188 Librería Sclentifica, Dot t . Lucio de Blasio "aeiou". Via Meravigli 16, 1-20123 Milan Maruzen Company, L td , P.O. Box 5050,100-31 Tokyo International Mlrza Book Agency, 65, Shahrah Quald-e-Azam, P.O. Box 729, Lahore 3 Ars Polona-Ruch, Céntrala Handlu Zagranicznego, Krakowskie Przedmiescie 7, PL-00-068 Warsaw l lexim, P O. Box 136-137, Bucharest Van Schaik Bookstore (Ptyl Ltd, P.O. Box 724, Pretoria 0001 Diaz de Santos, Lagasca 95, E-28006 Madrid Diaz de Santos, Balmes 417, E-08022 Barcelona AB Fritzes Kungl. Hovbokhandel, Fredsgatan 2, P.O. Box 16356, S-103 27 Stockholm Her Majesty's Stationery Office, Publications Centre, Agency Section, 51 Nine Elms Lane, London SW8 5DR Mezhdunarodnaya Kniga,Smolenskaya-Sennaya 32-34, Moscow G-200 Jugoslovenska Knjlga, Terazije 27.P.O. Box 36, YU-11001 Belgrade
Orders from countries where sales agents have not yet been appointed and requests for information should be addressed directly to:
Division of Publications J International Atomic Energy Agency
Wagramerstrasse 5, P.O. Box 100, A-1400 Vienna, Austria

in со
о О) 00


INTERNATIONAL ATOMIC ENERGY AGENCY VIENNA, 1989
SUBJECT GROUP: V Reactors and Nuclear Power/ Reactor Technology