Embed Size (px)
Citation preview

Geodesia spaziale
Distribuzione di massa a simmetria sferica
⇓orbite kepleriane
(piane, ellittiche con fuoco nel centro di massa)
Parametri orbitali definizione del piano orbitale
- i inclinazione rispetto al piano equatoriale - Ω longitudine del nodo ascendente (rispetto a una direzione
determinata astronomicamente - punto γ - il sistema di riferimento è inerziale, non solidale con la terra)
definizione dell’orbita
- a,e2 semiasse maggiore ed eccentricità dell’ellisse - ω angolo della direzione del pericentro
con la linea del nodo ascendente parametro che descrive il moto lungo l’orbita (ad es., istante t0 del passaggio al nodo)

Geodesia spaziale
Nomenclatura Nodi: intersezioni dell’orbita con il piano equatoriale
nodo ascendente: dall’emisfero Sud a quello Nord
linea dei nodi: intersezione del piano orbitale con il piano equatoriale
Intersezioni dell’orbita ellittica con il suo asse maggiore:
pericentro: dal lato più vicino al centro di gravità (fuoco dell’ellisse)
apocentro: dal lato più lontano
Punto γ: direzione dell’intersezione fra piano equatoriale e piano dell’eclittica, nel verso corrispondente alla posizione della terra lungo la sua orbita all’equinozio di primavera.
Geodesia spaziale
Perturbazioni alle orbite kepleriane
deviazioni del campo della gravità dalla simmetria sferica
schiacciamento polare irregolarità della distribuzione di massa
campo gravitazionale della luna e del sole pressione di radiazione
luce solare diretta luce riflessa dalla terra (albedo) azione frenante dell’atmosfera
(anche molto rarefatta – qualche centinaio di km d’altezza)
parametri orbitali condizioni iniziali del moto ↔
(vettori velocità e posizione ad un istante t0)
⇓ possibilità di definire parametri orbitali istantanei (lentamente variabili nel tempo – equazioni di Lagrange)
- effetti periodici ed effetti secolari - stima (a minimi quadrati) dei parametri e calcolo delle
orbite per interpolazioni e predizioni
GPS - Segmento spaziale
(almeno) 24 satelliti su 6 orbite circolari raggio km26000≅
(ossia distanza dalla sup. terrestre km20000≅ ) periodo orbitale 11h58’ (1/2 giorno sidereo) inclinazione 550
distanziate in longitudine di 600
inizio lanci 1978 durata media satelliti 7-8 anni poi vengono disattivati e sostituiti attualmente blocchi II – IIA (inizio lanci 1989) previsti nuovi blocchi con caratteristiche tecnologiche aggiornate
GPS – segmento di controllo
controllo trasmissioni dei satelliti calcolo orbite calibrazione orologi dei satelliti aggiornamento messaggio di navigazione
Misura della distanza fra la stazione i e il satellite k
2/1222 ])()()[( ik
ik
ikk
i zzyyxxd −+−+−=
La stazione riceve all’istante t il segnale
)()( τ−= tStSr
τ tempo di percorrenza satellite-ricevitore
τ⋅= cd
c velocità della luce (e di ogni segnale elettromagnetico)
m/sec10*3 8=c

GPS
Segnale frequenza fondamentale MHz23.100 =f
onde portanti L1 L2
frequenza MHz42.15751 =f MHz60.12272 =f
)154( 0f )120( 0flunghezza d’onda cm191 ≅λ cm242 ≅λ
Modulazione Codice : sequenza binaria pseudo-casuale
↓ 0 – 1
Transizione Moltiplicazione cambiamento → → 0–1 oppure 1–0 del segnale per –1 di segno, ovvero . sfasamento di π
codice C/A cadenza MHz023.110
0 =f
lunghezza 1023bit
coarse acquisition (durata 1msec) [solo su L1] P (criptato) cadenza MHz23.100 =f durata 266.4 giorni precision [su L1 (sfasata di 2/π ) e L2] • orbite Messaggio D 50bit/sec informazioni su • orologi . • ionosfera . • stato del . satellite
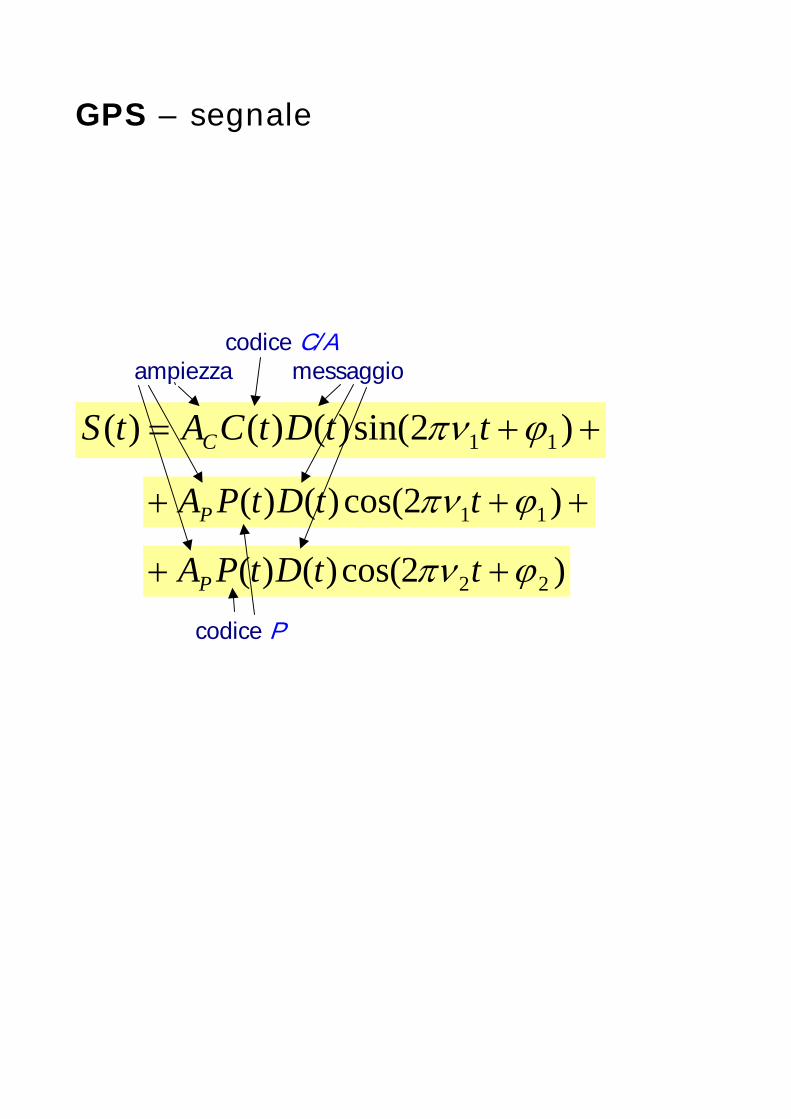
GPS – segnale codice C/A ampiezza messaggio
++= )2sin()()()( 11 ϕπν ttDtCAtS C
+++ )2cos()()( 11 ϕπν ttDtPAP
)2cos()()( 22 ϕπν ++ ttDtPAP
codice P

Determinazione di τ
Il ricevitore è in grado di produrre un segnale identico a quello del satellite: )(tS
[il codice deve quindi essere noto] viene determinato lo sfasamento
fra )(tS e )( τ+tS è essenziale la sincronizzazione
fra orologio del ricevitore e orologio del satellite
gli orologi di tutti i ricevitori e di tutti i satelliti
devono essere riferiti alla stessa scala dei tempi
GPSt NOTA:
cm30sec10 m/sec10*3 , 98 =⇒=== − dtctcd δδδδ
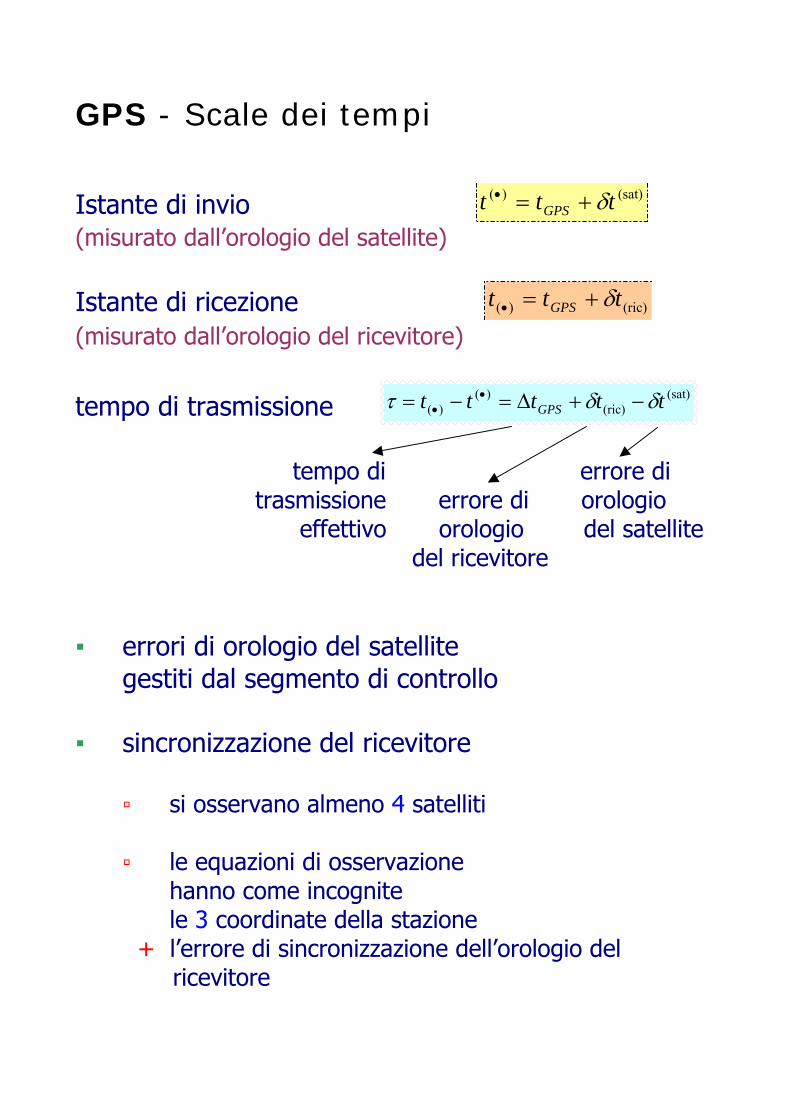
GPS - Scale dei tempi
Istante di invio (sat))( ttt GPS δ+=• (misurato dall’orologio del satellite) Istante di ricezione (ric))( ttt GPS δ+=• (misurato dall’orologio del ricevitore) tempo di trasmissione
(sat)(ric)
)()( ttttt GPS δδτ −+∆=−= ••
tempo di errore di trasmissione errore di orologio effettivo orologio del satellite del ricevitore errori di orologio del satellite gestiti dal segmento di controllo sincronizzazione del ricevitore si osservano almeno 4 satelliti le equazioni di osservazione
hanno come incognite le 3 coordinate della stazione + l’errore di sincronizzazione dell’orologio del ricevitore
GPS - misure Misure di pseudo-range (uso del codice binario) lunghezza caratteristica C/A m300≅l (corrispondente a cadenza di 1MHz) accuratezza strumentale m3100/ =≅ l P m30≅l accuratezza strumentale 30cm
Misure di differenza di fase della portante Uso del segnale sinusoidale senza utilizzazione del codice
cm20 ⇒≅λ accuratezza strumentale 2mm Ambiguità del numero intero di cicli ( cicli nell’intervallo di tempo di percorrenza del segnale) 810≅ durante una sessione si mantiene il collegamento satellite-stazione ⇒ viene registrata la variazione nel tempo del numero intero di cicli
l’unica incognita è il numero intero di cicli ⇒ all’istante iniziale di ogni sessione

Equazioni di osservazione
Pseudorange (codice pseudo-casuale) satellite
=−+∆== )()(
kiGPS
ki tctctccp δδτ
νεδδ ++−+∆+∆+= )()(tropion
ki
ki tctcddd
ricevitore altri errori errori casuali
sistematici (strumentali)
Differenze di fase (della portante) frequenza
+−+∆+∆+= )()(tropion
ki
ki
ki tftf
cfd δδψψψ
νε ++− kiN
ambiguità n.ro intero di cicli

Determinazione dell’ambiguità iniziale del numero intero di cicli
satellite in collegamento continuo con la stazione
durante una sessione acquisizioni discrete (ogni 1sec, 5sec, 30sec,…..) ad ogni acquisizione
la posizione del satellite è diversa Incognite:
3 coordinate della stazione (sempre le stesse se la stazione è fissa - GPS statico - diverse ad ogni acquisizione
se la stazione è in moto - GPS cinematico - ) differenza delle scale dei tempi ambiguità
iniziale del numero intero di cicli
sempre la stessa in una sessione
⇓
Determinazione dell’ambiguità iniziale del numero intero di cicli
⇒ osservando più di 4 satelliti si ha un numero sufficiente di equazioni per determinare l’ambiguità
⇒ è necessario un post-processing dei dati [non in tempo reale]
NOTA: la soluzione delle equazioni
(eventualmente ai minimi quadrati se c’è ridondanza) dà un valore reale dell’ambiguità bisogna fissare un valore intero
non si può in generale scegliere l’intero più vicino con assoluta certezza
Cycle slip: interruzione del collegamento satellite-stazione
durante una sessione (occultazione, malfunzionamento, ecc.)
L’ambiguità iniziale va ricalcolata
GPS - Errori sistematici
difetti di sincronizzazione degli orologi (10-100m) errori di orbita dei satelliti
(riducibili usando effemeridi precise) (5-10m) errori di propagazione nell’atmosfera
ionosfera (sopra 40-50km) interazione con particelle cariche
variabile nel tempo (ad es., con l’attività solare)
dipende dalla frequenza
può essere modellizzata utilizzando ⇒
entrambe le frequenze del segnale (20-50m)
troposfera (sotto 20km) dipende dalla quantità di vapore acqueo difficilmente modellizzabile (bisognerebbe conoscere la quantità di vapore acqueo lungo tutto il percorso del segnale) (2-10m) errori di ricezione
multipath il segnale giunge parzialmente al ricevitore dopo riflessioni (ad es. su superfici metalliche)
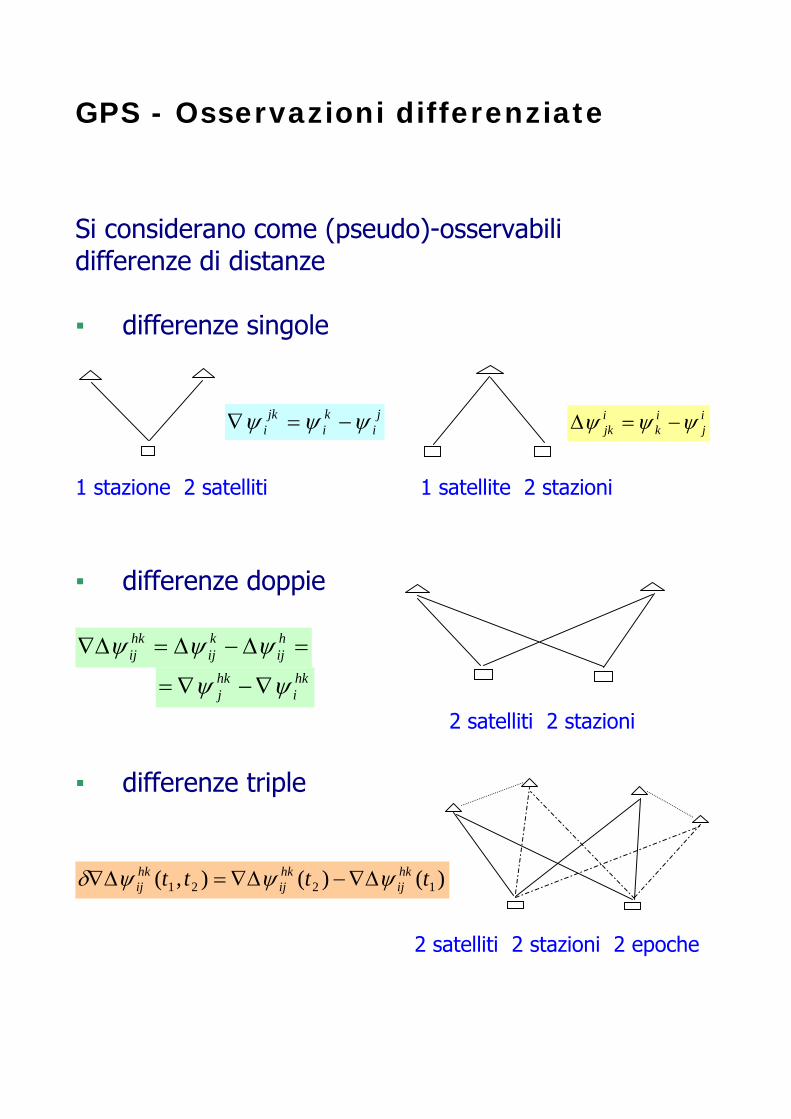
GPS - Osservazioni differenziate
Si considerano come (pseudo)-osservabili differenze di distanze differenze singole j
iki
jki ψψψ −=∇ i
jik
ijk ψψψ −=∆
1 stazione 2 satelliti 1 satellite 2 stazioni differenze doppie
=∆−∆=∆∇ hij
kij
hkij ψψψ hk
ihkj ψψ ∇−∇=
2 satelliti 2 stazioni differenze triple
)()(),( 1221 tttt hkij
hkij
hkij ψψψδ ∆∇−∆∇=∆∇
2 satelliti 2 stazioni 2 epoche

GPS - Osservazioni differenziate
ψ∇ cancella errore di orologio della stazione
ψ∆ cancella errore di orologio del satellite
riduce significativamente errori atmosferici
(specialmente se le stazioni sono vicine)
ψ∆∇ combina cancellazioni e riduzioni d’errore delle differenze singole
presenta una discontinuità
in caso di cycle-slip in uno dei segnali
ψδ ∆∇ non dipende dall’ambiguità intera se non c’è cicle-slip fra t1 e t2
in caso di cycle-slip presenta
una doppia discontinuità fra e cs2 tt = cs1 tt = (picco)

Con le osservazioni GPS differenziate
si determina male la posizione assoluta (grossi errori propagati dagli errori di osservazione)
si determina bene la posizione relativa
(baselines = vettori congiungenti due stazioni) ⇒ è opportuno disporre di stazioni su punti noti
punti di una rete fiduciaria
(sono materializzati, ma l’utente deve metterci una stazione) stazioni permanenti
(ricevono in continuazione su una posizione fissa)

Sistema di riferimento GPS
WGS84 geocentrico
asse z parallelo all’asse convenzionale di rotazione
asse x nel piano del meridiano di Greenwich
Ellissoide GRS80 (Geodetic Reference System 1980)
)10*694379990.6(25723563.298/1
m6378137
32 −===
ef
a
sistema implicitamente definito dalle stazioni di controllo che calcolano e comunicano la posizione dei satelliti in questo sistema

Sistemi di riferimento GPS
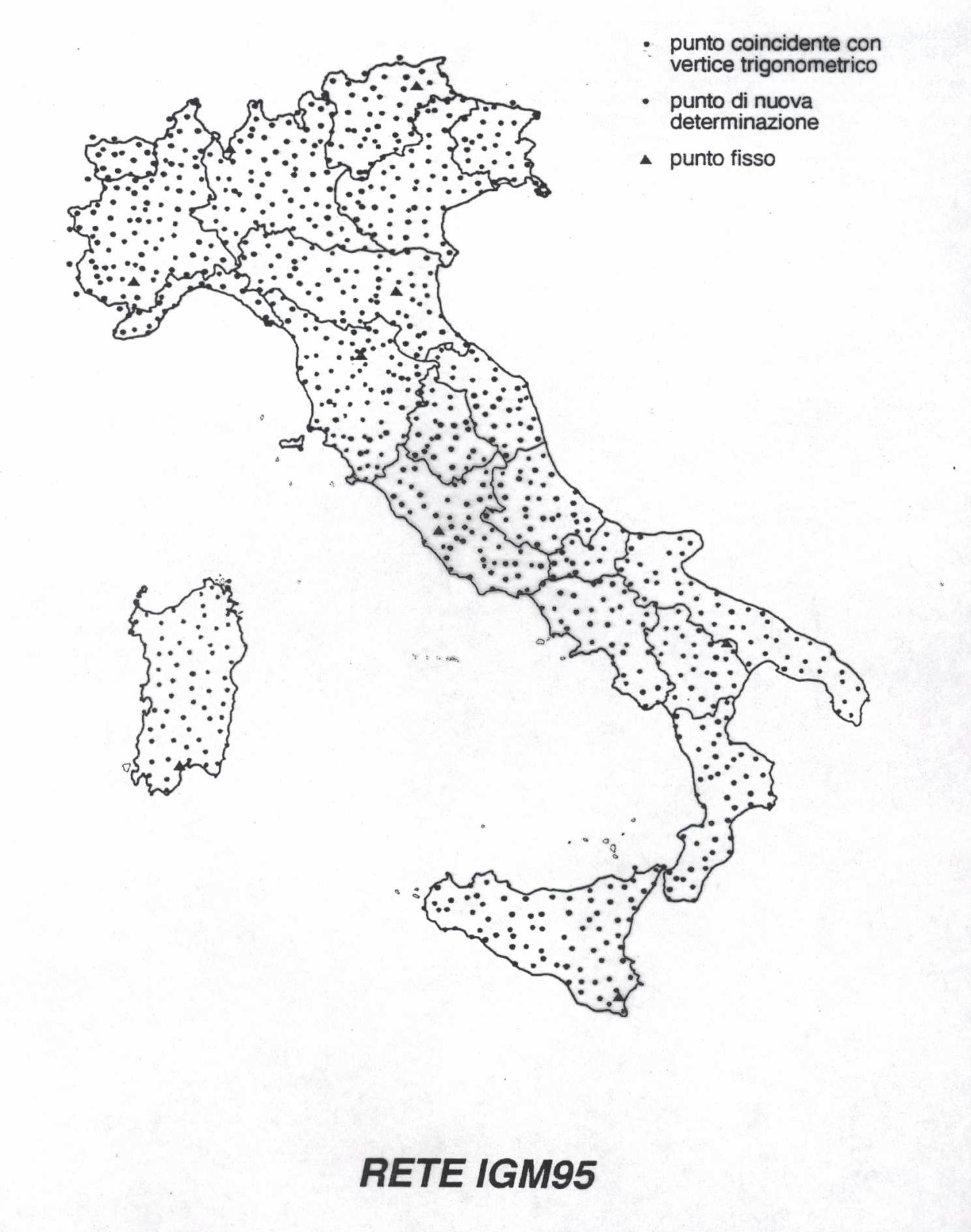
Rete IGM95 circa 1200 vertici (mediamente uno ogni circa 250km2 ) (lato ≈ 16km) Coordinate ITRF89 ITRFxx International Terrestrial Reference System ETRFxx European …… xx = anno Sistemi basati su reti di stazioni
(fra cui molte stazioni GPS permanenti) Possono rilevare movimenti delle placche tettoniche
[per ogni realizzazione, posizioni e velocità] Per scopi pratici di attività professionale interessa avere un sistema fisso
[i movimenti relativi sul territorio nazionale sono molto piccoli]
Trasformazioni WGS84 – Roma40
Rototraslazione con variazione di scala – 7 parametri
Traslazione ≈ 100m
Rotazione ≈ 1”
Variazione di scala ≈ 10-8
trasf. 7 par.
Roma40 ),,( WGS84),,( zyxzyx →
. par. geom. dell’ellissoide ↓
Roma40 ),,( hλϕ
↓ NhH −= geoide gravimetrico (ITALGEO99 – PoliMi-IGM)
A causa delle deformazioni di Roma40, i parametri sono validi solo localmente
I parametri possono essere calcolati con un software preparato da IGM
Per il calcolo sono necessari “punti doppi” con coordinate note in entrambi i sistemi (ad es., vertici IGM95)
Ma … in Roma40 sono note solo le coordinate planimetriche, e al più l’altezza ortometrica, non l’altezza ellissoidica

DGPS (GPS differenziale)
Posizionamento puntuale (non baseline) Correzioni atmosferiche fornite da stazione (master)con posizione nota (ad es., stazione permanente)
in differita (post-processing) in tempo reale cellulare radio (protocollo RTCM) (attualmente non disponibile
in Italia) da satellite
GPS cinematico
pseudorange – fase point-positioning – baseline
Fase – problema della determinazione dell’ambiguità iniziale del numero intero di cicli
mediante rilievo statico (prima di mettersi in moto e al termine della sessione)
OTF (On The Fly)
ridondanza del numero di satelliti osservati algoritmi che usano fase e pseudorange procedure ricorsive (Kalman) elevata frequenza di acquisizione (1sec)

GPS cinematico
RTK – Real Time Kinematic collegamento telematico con il master
GPS+INS (inerziale – misura di accelerazioni – sol. di eq. del moto)
integrazione nei tratti di interruzione del segnale GPS
Modalità cinematica per rilievi speditivi (brevi soste nei vertici della rete)
GPS – Compensazione delle osservazioni
Ridondanza delle misure di distanza
- numero ridondante di satelliti
- numerose epoche di acquisizione durante una sessione
l’accuratezza della posizione calcolata dipende fra l’altro dalla distribuzione geometrica dei satelliti DOP (Dilution Of Precision) fattore che lega l’accuratezza alla configurazione della costellazione

Compensazione di reti GPS
Singola sessione:
disponendo di n ricevitori si possono determinare n(n-1)/2 baselines ma … i dati utilizzati per ogni stazione sono sempre gli stessi ⇒ soltanto n-1 baselines sono indipendenti ⇒ non c’è ridondanza in linea di principio, è possibile determinazione multi-baseline (con matrice di covarianza completa) in pratica, in generale nei programmi commerciali l’elaborazione è per baseline singola (correlazione soltanto fra componenti diverse di una stessa baseline ) Compensazione della rete
baselines osservate in sessioni diverse per realizzare indipendenza ed avere quindi ridondanza effettiva