Embed Size (px)
Citation preview

Kazi ECE 6811
ECE 681ECE 681VLSI Design VLSI Design AutomationAutomationKhurram KaziKhurram Kazi
Thanks to Automation press Thanks to Automation press THE button outcomes the THE button outcomes the Chip !!! Reality or MythChip !!! Reality or Myth
(most of the material in this lecture is taken from Bhatnager’s (most of the material in this lecture is taken from Bhatnager’s book)book)

Kazi ECE 681 2
Describing environmental Describing environmental attributesattributes
set_max_capacitance
Set_max_transition
& set_max_fanout
on Inputs and Output ports or current design
set_operating_conditions
on the whole design
ClockDividerLogic
BlockBIP calc
FramingState
Machine
Top Level
set_wire_loadfor each block,
including top level
set_loadon outputs
set_driving_cellon input signals
clkset_driveon Clock

Kazi ECE 681 3
Environmental attributesEnvironmental attributes• Design environment consists of defining
the process parameters, I/O port attributes, and statistical wire load models.– Set_min_library <max_library filename> -min_version <min library filename>dc_shell> set_min_library “ex25_worst.db” \ -min_version “ex25_best.db”This command allows the users to simultaneously specify
the best case and worst case libraries. Can be used to fix set up and hold violation. The user should set both the min and the max values for the operating conditions

Kazi ECE 681 4
Setting operating conditionsSetting operating conditions• set_operating_conditions
– Specifies the process, voltage and temperature conditions of the design.
– Synopsys library consists of WORST, TYPICAL and BEST cases. Each vendor has their own naming convention for the libraries!
– Changing the value of the operating condition command, full range of process variations are covered.

Kazi ECE 681 5
Setting operating conditionsSetting operating conditions• set_operating_conditions
– WORST is generally used during pre-layout synthesis phase to optimize the maximum set-up time.
– BEST is normally used to fix any hold violations.
– TYPICAL is generally not used since it is covered when both WORST and BEST cases are used.

Kazi ECE 681 6
Setting operating conditionsSetting operating conditions• set_operating_conditions
– It is possible to optimize the design with both WORST and BEST cases simultaneously
dc_shell> set_operating_conditions WORST
dc_shell> set_operating_conditions –min BEST -max WORST

Kazi ECE 681 7
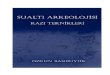
Operating conditionsOperating conditions
best
typicalworst
Delay
Process
best
typicalworst
Delay
temperature
besttypical
worst
Delay
Voltage
min typical max
% yield
PVT (Process, Voltage andTemperature curve)

Kazi ECE 681 8
Modeling wire loadsModeling wire loads•DC uses wire loads models to estimate capacitance, resistance and the area of the nets prior to floor planning or layout.
•The wire load model is based upon a statistically average length of a net for a given fan out for a given area
“10 x 10”
“20 x 20”

Kazi ECE 681 9
Wire load commandWire load command• DC uses wire load information to model
the delay which is a function of loading• Synopsys provides wire load models in the
technology library, each representing a particular size.
• Designer can create their own wire load models for better accuracy
set_wire_load_model –name <wire-load model>
dc_shell -t>set_wire_load_model –name MEDIUM

Kazi ECE 681 10
Wire load modeWire load mode• There are 3 modes associated with the
set_wire_load_mode: top, enclosed and segmented• top
– Defines that all nets in the hierarchy will inherit the same wire load model as the top level block. Use it if when the plan is to flatten the design later for layout.
• enclosed– Specifies all the nets (of the sub-blocks) inherit the wire
load model of the block that completely encloses the sub-blocks. For example, if blocks X and Y are enclosed within block Z, then the blocks X and Y will inherit the wire load models defined for block Z.

Kazi ECE 681 11
Wire load modeWire load mode• segmented
– Used when wires are crossing hierarchical boundaries. From the previous example, the sub-blocks X and Y will inherit the wire load models specific to them, while nets between sub-blocks X and Y(which are contained within Z) will inherit wire-load model specified for block Z
– Not used often, as the wire load models are specific to the net segments
set_wire_load_mode <top|enclosed|segmented>dc_shell>set_wire_load_mode top
Accurately using wire load models is highly recommended as this directly affects the synthesis runs. Wrong model can generate undesired results. Use slightly pessimistic wire load models. This will provide extra time margin that may be absorbed later in the test circuit insertion or layout

Kazi ECE 681 12
Wire load models across Wire load models across hierarchyhierarchy
50x50
20x20
40x40
50x50
30x30
50x50
20x20
40x40
40x40
30x30
50x50
20x20
40x40
40x40
30x30
mode = top: (ignores lower level wire loads)
mode = enclosed: (uses best fitting wire loads)
mode = segmented: (uses several wire loads)
30x3020x20

Kazi ECE 681 13
set_driveset_drive• set_drive is used at the input ports of
the block. It is used to specify the drive strength at the input port. Is typically used to model the external drive resistance to the ports of the block or chip. 0 signifies highest strength and is normally used for clock or reset ports.
set_drive <value><object list> dc_shell> set_drive 0 {clk rst}

Kazi ECE 681 14
set_driving_cellset_driving_cell
• set_driving_cell is used to model the drive resistance of the driving cell to the input ports.
set_driving_cell –cell <cell name> -pin <pin name> <object list>
dc_shell>set_driving_cell –cell BUFF1 –pin Z [all_inputs]

Kazi ECE 681 15
set_loadset_load• set_load sets the capacitive load in the units
defined in the technology library (pf), to the specified ports or nets of the design. It typically sets capacitive loading on output ports of the blocks during pre-layout synthesis, and on nets, for back annotating the extracted post layout capacitive information
set load <value> <object list>dc_shell>set_load 1.5 [all_outputs]dc_shell> set_load 0.3 [get_nets blockA/n1234]

Kazi ECE 681 16
Design rule constraintsDesign rule constraints• Design rule constraints consist of set_max_transition,
set_max_fanout and set_max_capacitance. These rules are technology dependent and are generally set in the technology library. The DRC commands are applied to input ports, output ports or on the current_design. It can be useful if the technology library is not adequate of is too optimistic, then these commands can be used to control the buffering in the design
set_max_transition <value> <object list> set_max_capacitance <value> object list> set_max_fanout ,value> <object list>dc_shell –t>set_max_transition 0.3 current_designdc_shell –t>set_max_capacitance 1.5 [get_ports out1]dc_shell –t>set_max_fanout 3.0 [all_outputs](dc_shell –t> corresponds to DC operating in tcl mode)

Kazi ECE 681 17
Some more design Some more design constraintsconstraints
dc_shell –t >create_clock –period 40 -waveform [list 0 20] CLKset_dont_touch_network is a very useful
command and is usually used for clock and reset. It is used to set_dont_touch property on a port, or a net. This prevents DC from buffering the net in order to meet DRCs.
dc_shell –t>set_dont_touch_network {clk, rst}

Kazi ECE 681 18
Some more design Some more design constraintsconstraints
• If a block generates a secondary clock from the primary, e.g. byte clock from the serial clock, in this apply set_dont_touch_network on the generated clock output port of the block. Helps prevent DC from buffering it up. Clock trees can later be inserted to balance the clock skew.

Kazi ECE 681 19
Some more design Some more design constraintsconstraints
• set_dont_touch is used to set a dont_touch property on the current design, cells, references or net. This is frequently used during hierarchical compilations of the block.
dc_shell –t>set_dont_touch current_designUseful in telling DC not to touch the current
design if it has been optimized to designer’s satisfaction. For example, if some spare gates block is instantiated, DC will not touch it or optimize it.

Kazi ECE 681 20
Some more design Some more design constraintsconstraints
• set_dont_use command is normally set in .synopsys_dc.setup environment file. This command tells DC not to use certain types of cells during synthesis process. For example, one can specify not to use scan flip flops (they normally have built in Muxes)
• set_dont_use [list mylib/SDFF* mylib/RSFF]

Kazi ECE 681 21
A simple schematicA simple schematic

Kazi ECE 681 22
Schematic converted into a Schematic converted into a timing graphtiming graph
Each arrow represents a net or a cell delay (timing arc)

Kazi ECE 681 23
Calculating a path’s delayCalculating a path’s delay1.0
0.50.34
0.25
0.12
Path delay = 1.0 + 0.5 + 0.34 + 0.25 + 0.12 = 2.21
0.0
0.75
0.450.56
0.2
0.1
Path delay = 0.75 + 0.45 + 0.56 +0.1 + 0.2 +0.1 = 2.16 0.1

Kazi ECE 681 24
BIP CalculatorBIP Calculator
AO
B
Example:
A B O
0 0 0
1 1 1
1 0 0
1 1 1
0 1 1
0 1 1
1 0 0
1 1 1
1 0 0
F6 28
1111 0110
0010 1000 -> 1101 1110 = BIP1

Kazi ECE 681 25
PRBS detectorPRBS detector
datain
clk
set

Kazi ECE 681 26
Assignment 1 must haves in Assignment 1 must haves in the report (Due on Oct 9)the report (Due on Oct 9)
• Should have more than 1 block of code (multiple VHDL files)• Show how you tested the sub blocks• Show how you tested the top level block (framer ASIC)• Should have a test plan (description of different test cases, verifying
different conditions– Should show different frame states– Should show at least one BIP error condition and your circuit detected it
• Code must have comments and has to be readable • Should have run synthesis on it and run at least one gate level
simulation (assuming we have some gate level library)• The report should be a comprehensive report, telling the reader
what is the functionality of the ASIC, what are its features etc• Describe your test environment, i.e. pattern generator, pattern
detector (signal analyzer) or self checking mechanism of all the outputs from the ASIC. (waveform analysis is not good enough)

Kazi ECE 681 27
Suggested ideas for the Suggested ideas for the projectproject
• IP Packet classification and forwarding• Ethernet 10 or 100 mbps MAC or repeater• Elaborate SONET framer• Ethernet VLAN tagging function• Some protocol mapping function (segmenting IP
packets in ATM cells)• Cryptography• Image/video processing• Bottom Line: have a system prospective in mind
before delving into the functional description. FIRST cut of your project ideas are due on October 2. Should have a brief overview of what you are trying to achieve