Embed Size (px)
Citation preview
Lecture 13:inverse kinematics I
Prof. Katie Driggs-CampbellCo-Teaching with Prof. Belabbas
October 14, 2021
Administrivia
• Project Update 1 is due Saturday 10/16 at midnight• All informaBon about the project updates (including due dates) are online
• HW 4 is due next Friday 10/22 at 8pm• Next Thursday (10/21) will be project catch-up day
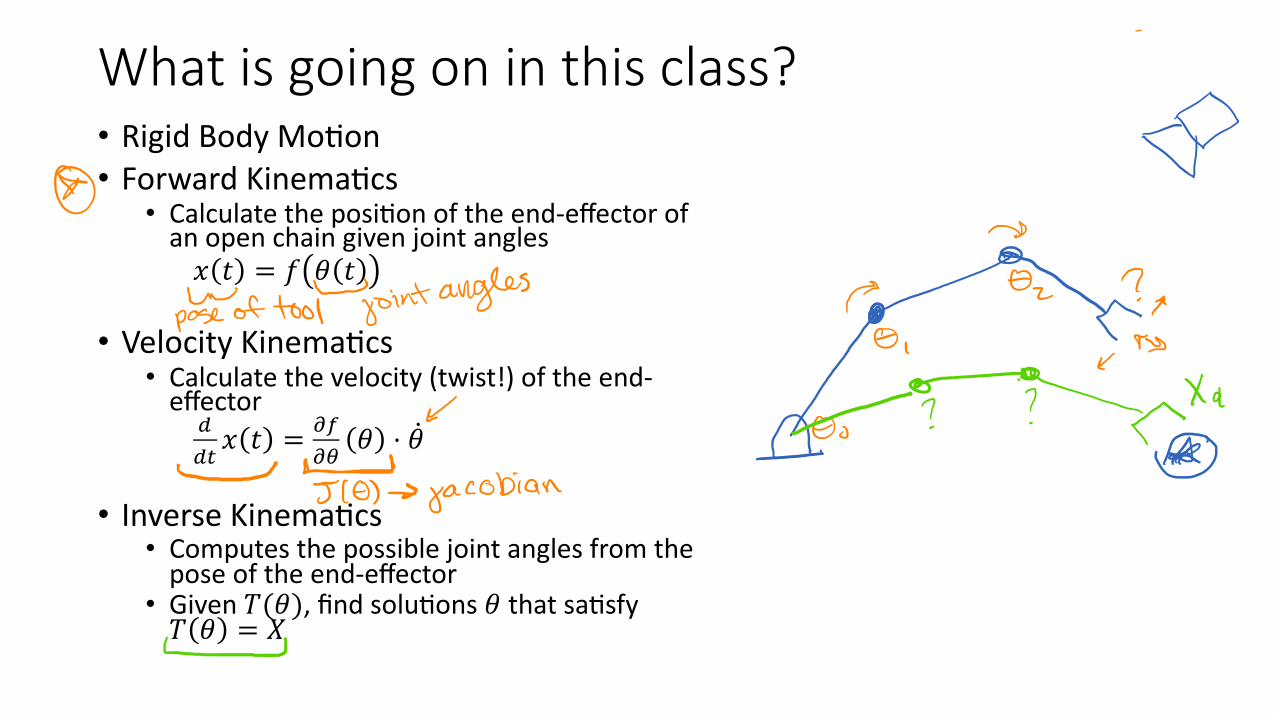
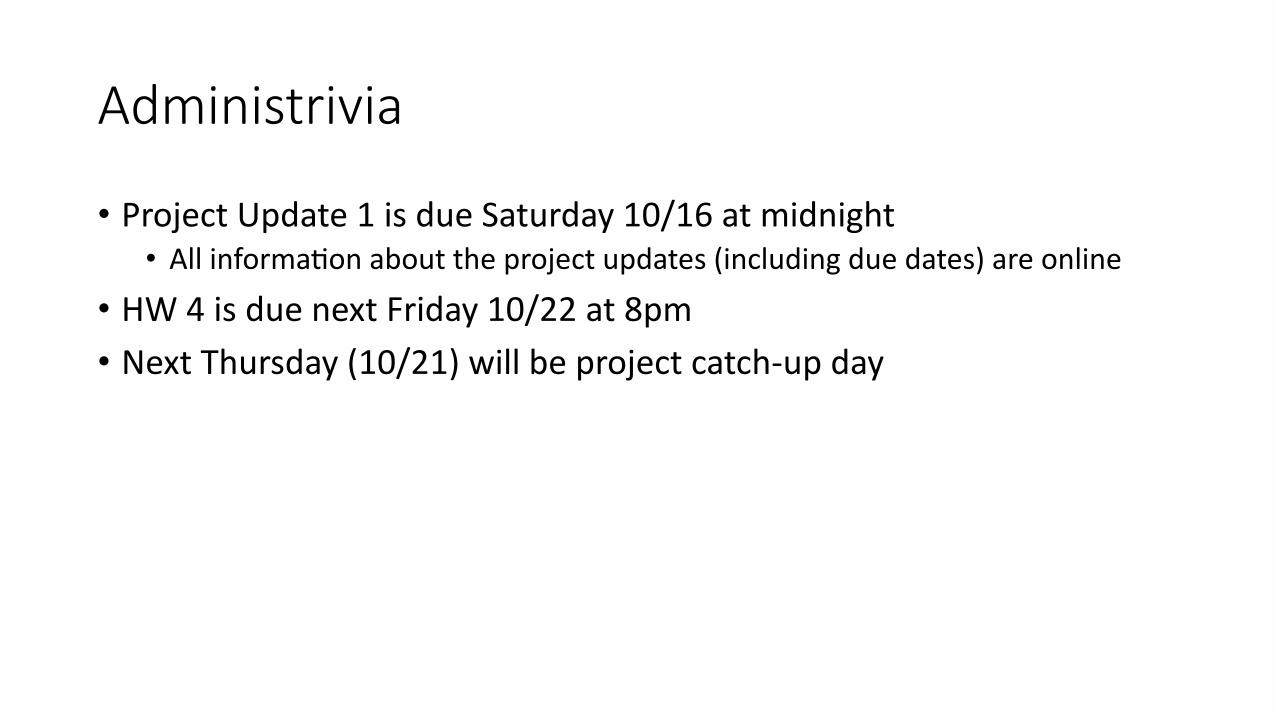
What is going on in this class?• Rigid Body Mo*on• Forward Kinema*cs
• Calculate the posi.on of the end-effector of an open chain given joint angles𝑥 𝑡 = 𝑓 𝜃 𝑡
• Velocity Kinema*cs• Calculate the velocity (twist!) of the end-
effector!!"𝑥 𝑡 = #$
#%𝜃 ⋅ �̇�
• Inverse Kinema*cs• Computes the possible joint angles from the
pose of the end-effector• Given 𝑇(𝜃), find solu.ons 𝜃 that sa.sfy 𝑇 𝜃 = 𝑋
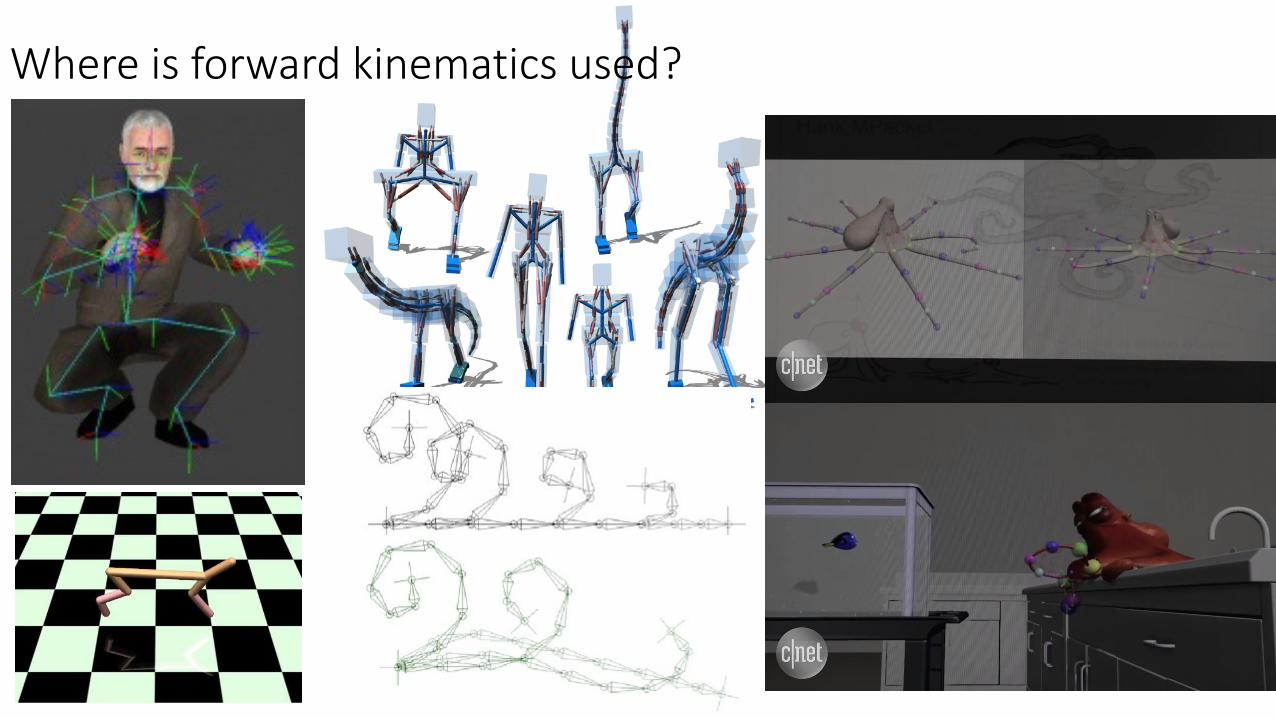
Where is forward kinematics used?
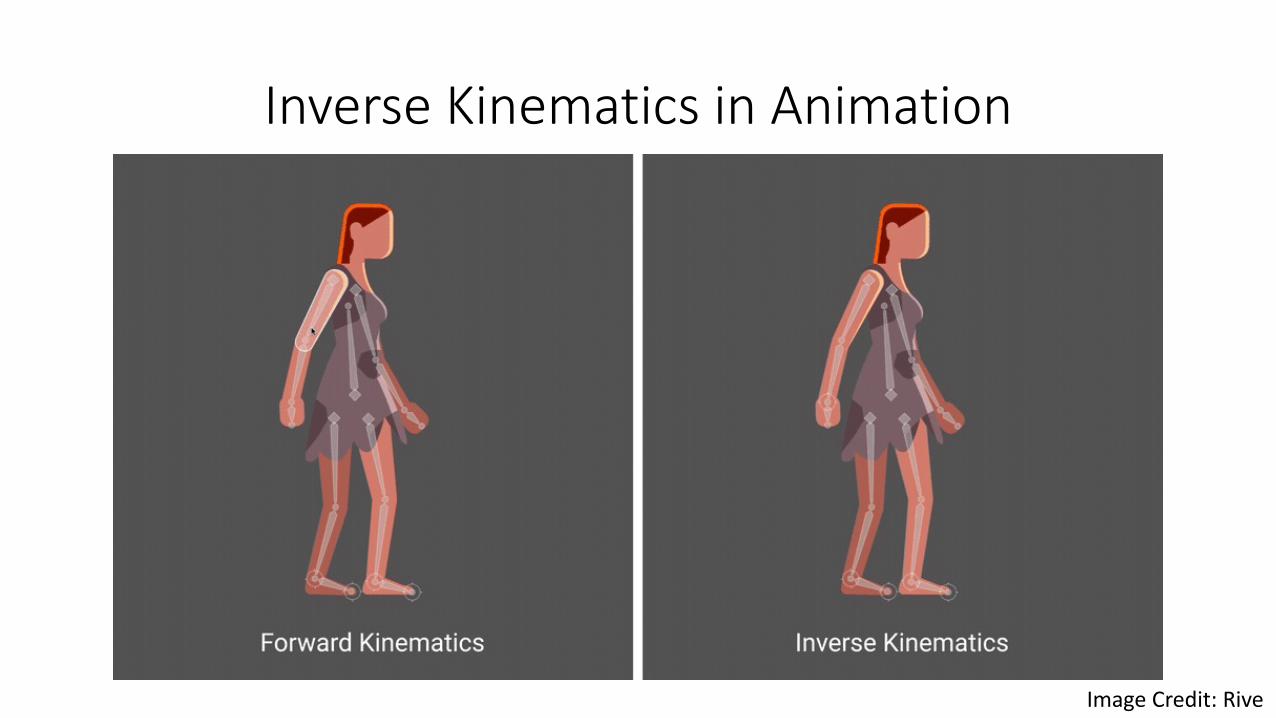
Inverse Kinematics in Animation
Image Credit: Rive
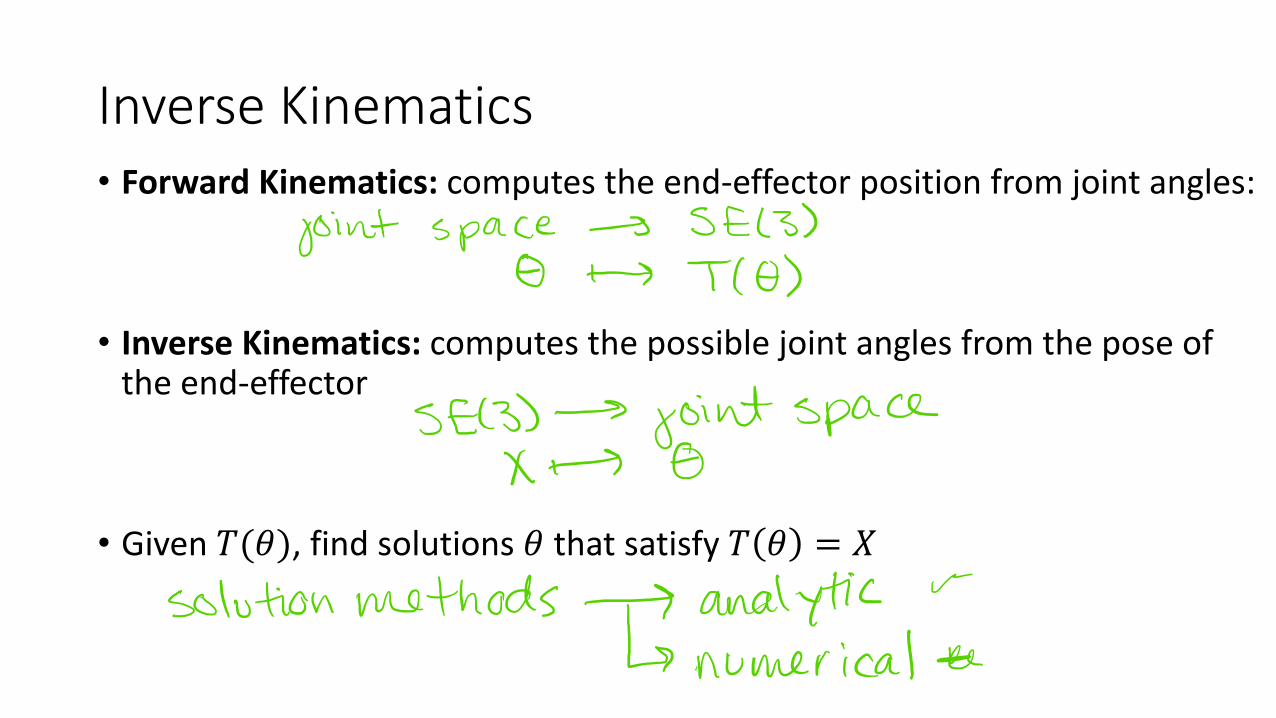
Inverse Kinematics• Forward Kinematics: computes the end-effector position from joint angles:
• Inverse Kinematics: computes the possible joint angles from the pose of the end-effector
• Given 𝑇(𝜃), find solutions 𝜃 that satisfy 𝑇 𝜃 = 𝑋
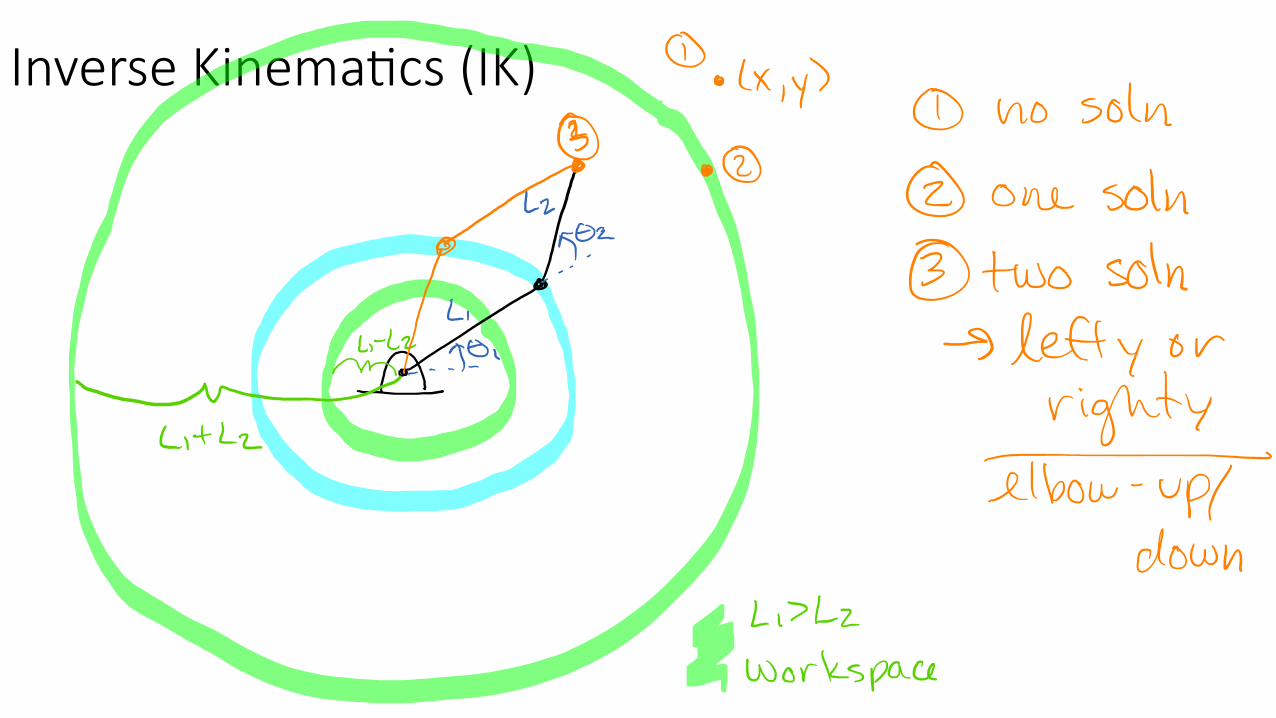
Inverse Kinema6cs (IK)
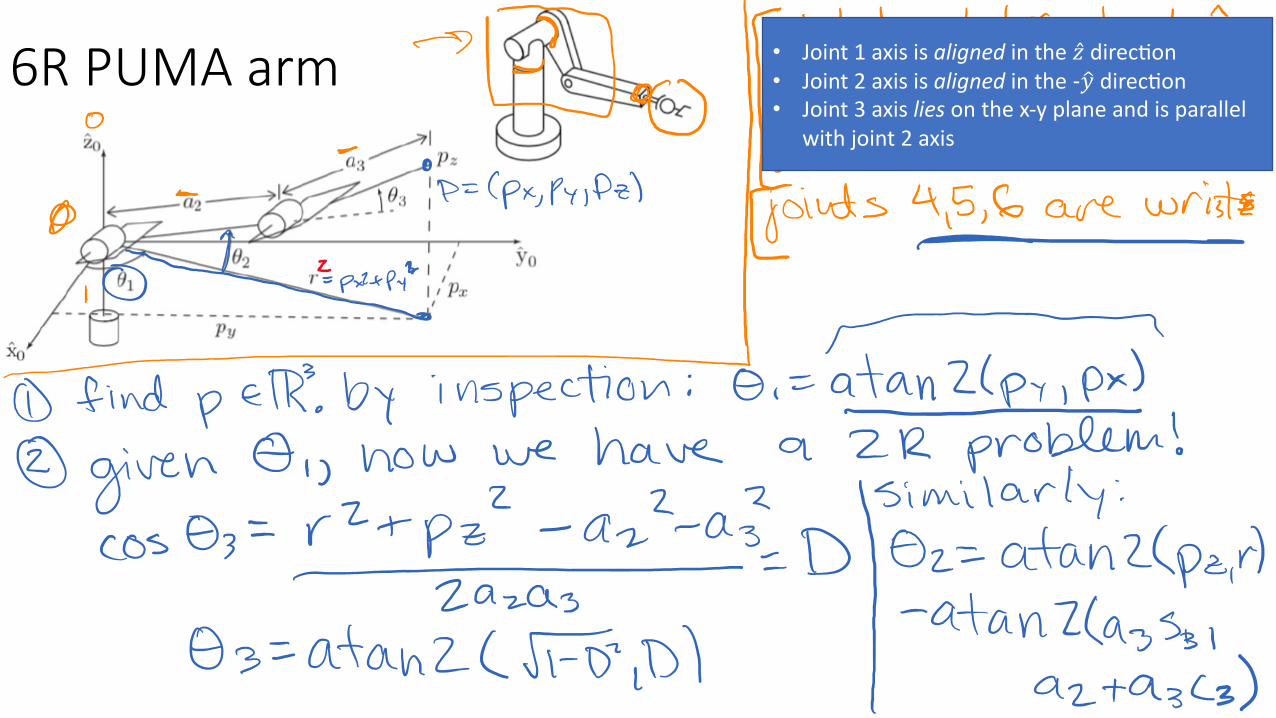
6R PUMA arm • Joint 1 axis is aligned in the �̂� direc7on• Joint 2 axis is aligned in the - $𝑦 direc7on• Joint 3 axis lies on the x-y plane and is parallel
with joint 2 axis
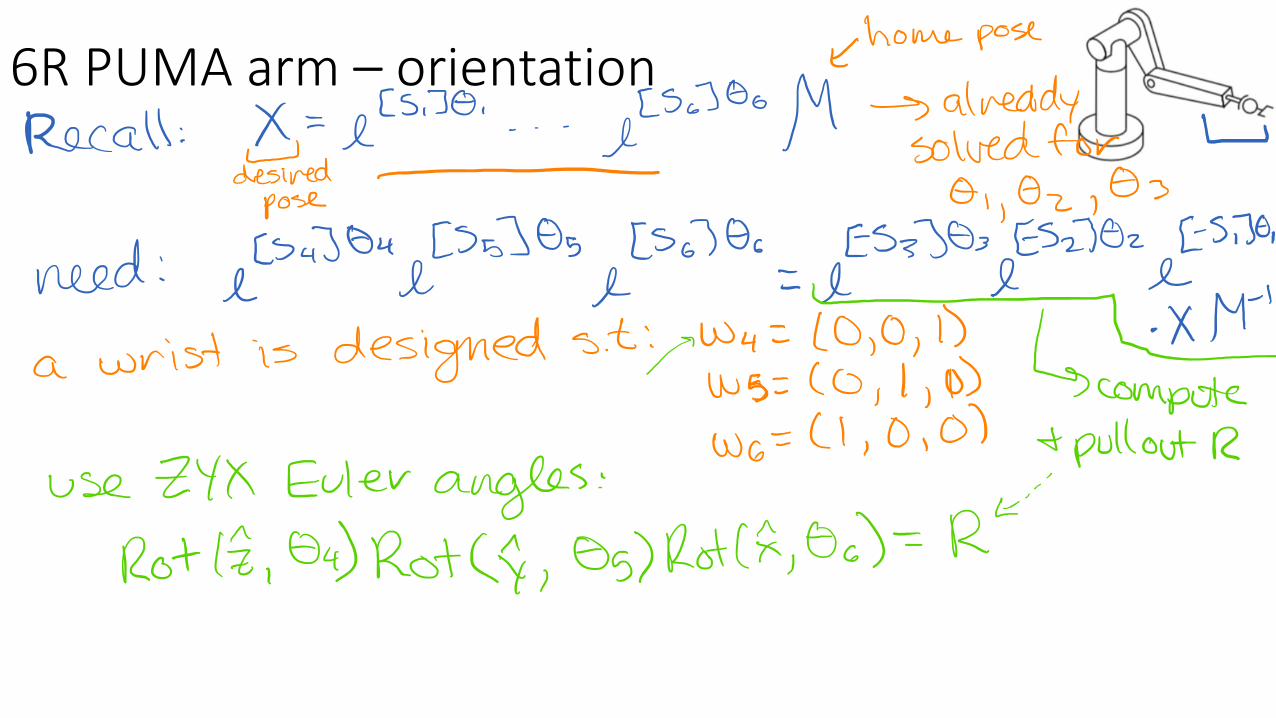
6R PUMA arm – orientation
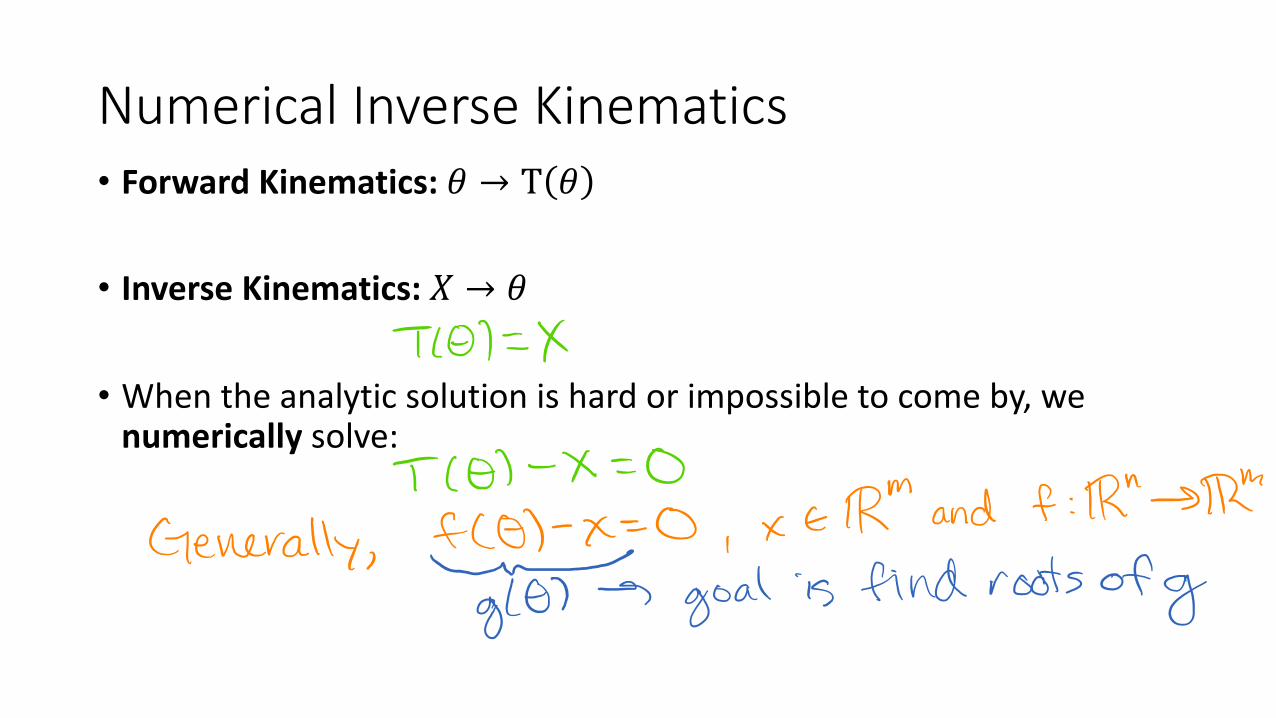
Numerical Inverse Kinematics• Forward Kinematics: 𝜃 → T 𝜃
• Inverse Kinematics: 𝑋 → 𝜃
• When the analytic solution is hard or impossible to come by, we numerically solve:
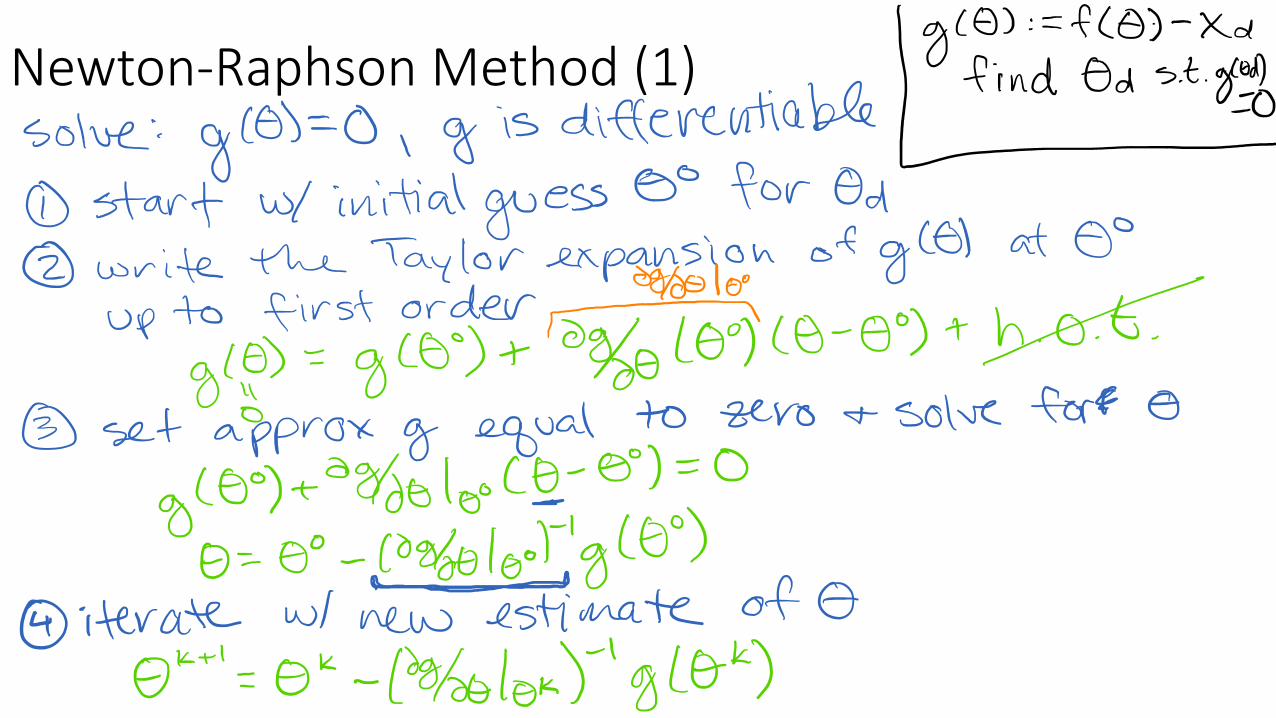
Newton-Raphson Method (1)
Newton-Raphson Method (2)
Summary
• Reviewed analytic inverse kinematics, which helps us find the joint angles that will produce a desired end-effector pose• We can do this with the help of atan2 and ZYX Euler Angles• However, this is only works for relatively simple robot chains
• Introduced the Newton-Raphson method, which can be modified to solve inverse kinematics numerically