Embed Size (px)
Citation preview

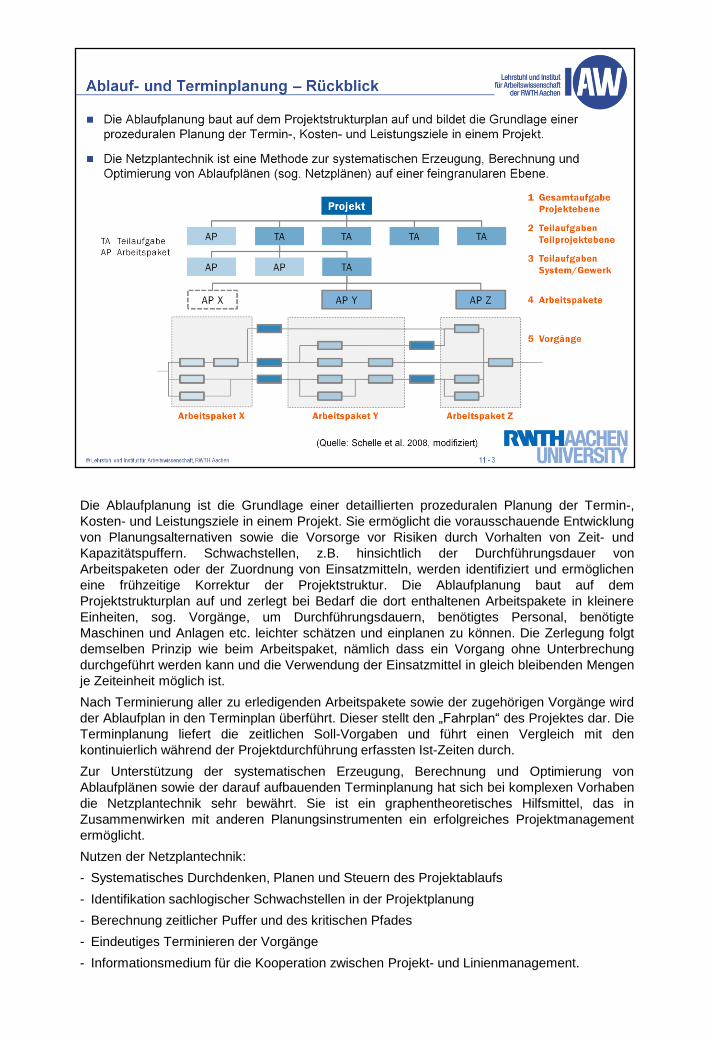
Die Ablaufplanung ist die Grundlage einer detaillierten prozeduralen Planung der Termin-,
Kosten- und Leistungsziele in einem Projekt. Sie ermöglicht die vorausschauende Entwicklung
von Planungsalternativen sowie die Vorsorge vor Risiken durch Vorhalten von Zeit- und
Kapazitätspuffern. Schwachstellen, z.B. hinsichtlich der Durchführungsdauer von
Arbeitspaketen oder der Zuordnung von Einsatzmitteln, werden identifiziert und ermöglichen
eine frühzeitige Korrektur der Projektstruktur. Die Ablaufplanung baut auf dem
Projektstrukturplan auf und zerlegt bei Bedarf die dort enthaltenen Arbeitspakete in kleinere
Einheiten, sog. Vorgänge, um Durchführungsdauern, benötigtes Personal, benötigte
Maschinen und Anlagen etc. leichter schätzen und einplanen zu können. Die Zerlegung folgt
demselben Prinzip wie beim Arbeitspaket, nämlich dass ein Vorgang ohne Unterbrechung
durchgeführt werden kann und die Verwendung der Einsatzmittel in gleich bleibenden Mengen
je Zeiteinheit möglich ist.
Nach Terminierung aller zu erledigenden Arbeitspakete sowie der zugehörigen Vorgänge wird
der Ablaufplan in den Terminplan überführt. Dieser stellt den „Fahrplan“ des Projektes dar. Die
Terminplanung liefert die zeitlichen Soll-Vorgaben und führt einen Vergleich mit den
kontinuierlich während der Projektdurchführung erfassten Ist-Zeiten durch.
Zur Unterstützung der systematischen Erzeugung, Berechnung und Optimierung von
Ablaufplänen sowie der darauf aufbauenden Terminplanung hat sich bei komplexen Vorhaben
die Netzplantechnik sehr bewährt. Sie ist ein graphentheoretisches Hilfsmittel, das in
Zusammenwirken mit anderen Planungsinstrumenten ein erfolgreiches Projektmanagement
ermöglicht.
Nutzen der Netzplantechnik:
- Systematisches Durchdenken, Planen und Steuern des Projektablaufs
- Identifikation sachlogischer Schwachstellen in der Projektplanung
- Berechnung zeitlicher Puffer und des kritischen Pfades
- Eindeutiges Terminieren der Vorgänge
- Informationsmedium für die Kooperation zwischen Projekt- und Linienmanagement.
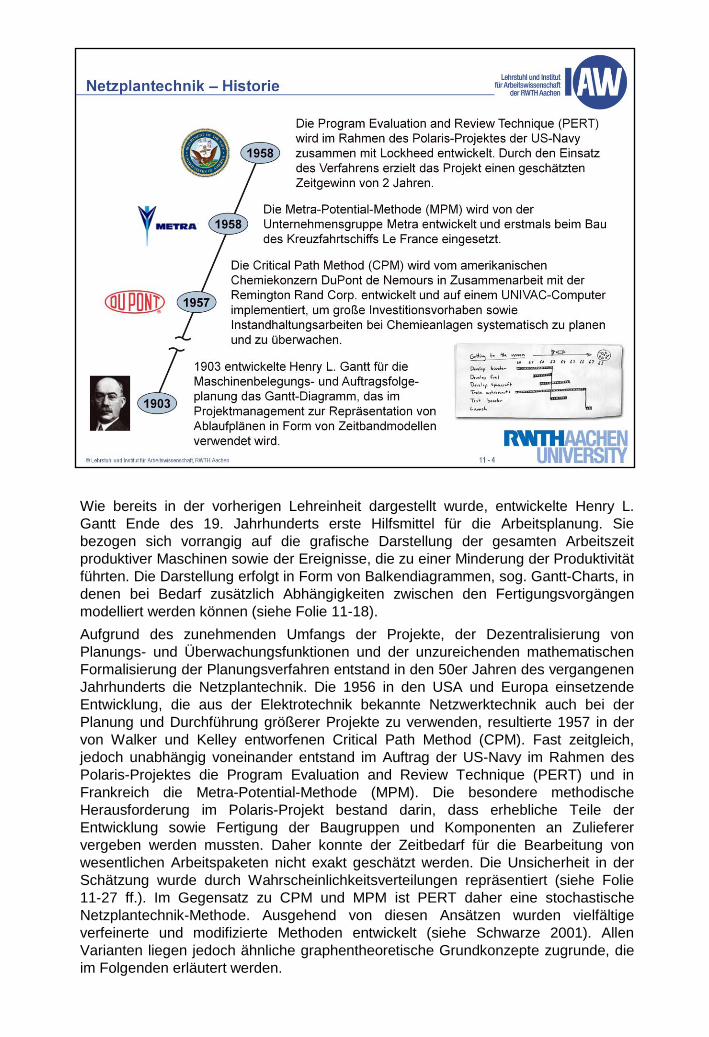
Wie bereits in der vorherigen Lehreinheit dargestellt wurde, entwickelte Henry L.
Gantt Ende des 19. Jahrhunderts erste Hilfsmittel für die Arbeitsplanung. Sie
bezogen sich vorrangig auf die grafische Darstellung der gesamten Arbeitszeit
produktiver Maschinen sowie der Ereignisse, die zu einer Minderung der Produktivität
führten. Die Darstellung erfolgt in Form von Balkendiagrammen, sog. Gantt-Charts, in
denen bei Bedarf zusätzlich Abhängigkeiten zwischen den Fertigungsvorgängen
modelliert werden können (siehe Folie 11-18).
Aufgrund des zunehmenden Umfangs der Projekte, der Dezentralisierung von
Planungs- und Überwachungsfunktionen und der unzureichenden mathematischen
Formalisierung der Planungsverfahren entstand in den 50er Jahren des vergangenen
Jahrhunderts die Netzplantechnik. Die 1956 in den USA und Europa einsetzende
Entwicklung, die aus der Elektrotechnik bekannte Netzwerktechnik auch bei der
Planung und Durchführung größerer Projekte zu verwenden, resultierte 1957 in der
von Walker und Kelley entworfenen Critical Path Method (CPM). Fast zeitgleich,
jedoch unabhängig voneinander entstand im Auftrag der US-Navy im Rahmen des
Polaris-Projektes die Program Evaluation and Review Technique (PERT) und in
Frankreich die Metra-Potential-Methode (MPM). Die besondere methodische
Herausforderung im Polaris-Projekt bestand darin, dass erhebliche Teile der
Entwicklung sowie Fertigung der Baugruppen und Komponenten an Zulieferer
vergeben werden mussten. Daher konnte der Zeitbedarf für die Bearbeitung von
wesentlichen Arbeitspaketen nicht exakt geschätzt werden. Die Unsicherheit in der
Schätzung wurde durch Wahrscheinlichkeitsverteilungen repräsentiert (siehe Folie
11-27 ff.). Im Gegensatz zu CPM und MPM ist PERT daher eine stochastische
Netzplantechnik-Methode. Ausgehend von diesen Ansätzen wurden vielfältige
verfeinerte und modifizierte Methoden entwickelt (siehe Schwarze 2001). Allen
Varianten liegen jedoch ähnliche graphentheoretische Grundkonzepte zugrunde, die
im Folgenden erläutert werden.
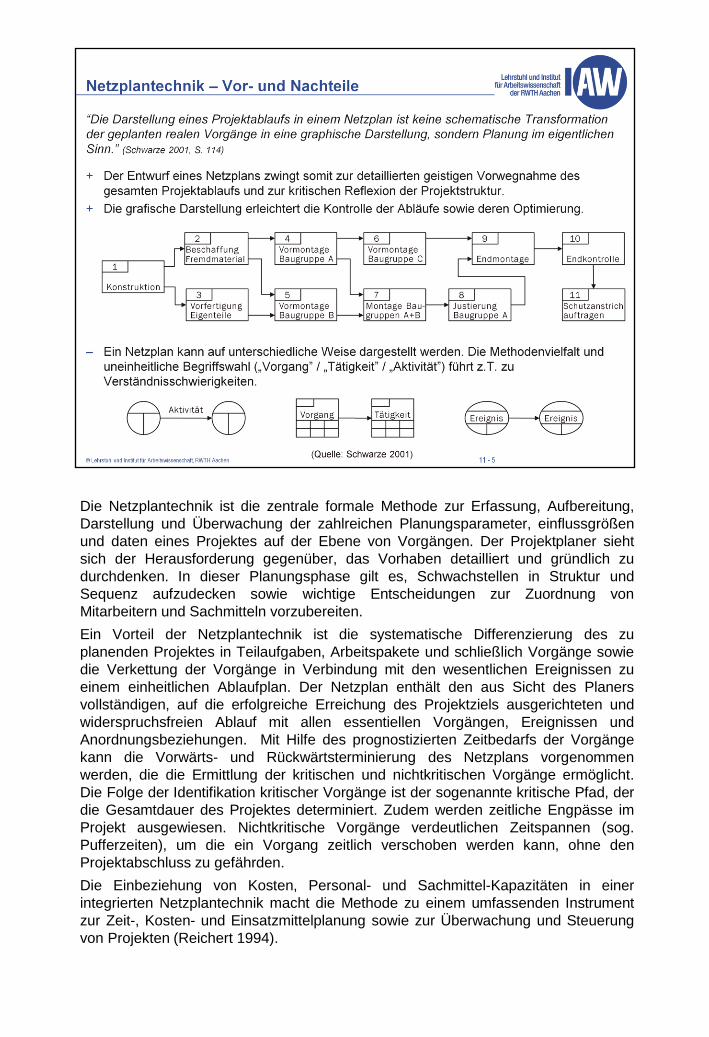
Die Netzplantechnik ist die zentrale formale Methode zur Erfassung, Aufbereitung,
Darstellung und Überwachung der zahlreichen Planungsparameter, einflussgrößen
und daten eines Projektes auf der Ebene von Vorgängen. Der Projektplaner sieht
sich der Herausforderung gegenüber, das Vorhaben detailliert und gründlich zu
durchdenken. In dieser Planungsphase gilt es, Schwachstellen in Struktur und
Sequenz aufzudecken sowie wichtige Entscheidungen zur Zuordnung von
Mitarbeitern und Sachmitteln vorzubereiten.
Ein Vorteil der Netzplantechnik ist die systematische Differenzierung des zu
planenden Projektes in Teilaufgaben, Arbeitspakete und schließlich Vorgänge sowie
die Verkettung der Vorgänge in Verbindung mit den wesentlichen Ereignissen zu
einem einheitlichen Ablaufplan. Der Netzplan enthält den aus Sicht des Planers
vollständigen, auf die erfolgreiche Erreichung des Projektziels ausgerichteten und
widerspruchsfreien Ablauf mit allen essentiellen Vorgängen, Ereignissen und
Anordnungsbeziehungen. Mit Hilfe des prognostizierten Zeitbedarfs der Vorgänge
kann die Vorwärts- und Rückwärtsterminierung des Netzplans vorgenommen
werden, die die Ermittlung der kritischen und nichtkritischen Vorgänge ermöglicht.
Die Folge der Identifikation kritischer Vorgänge ist der sogenannte kritische Pfad, der
die Gesamtdauer des Projektes determiniert. Zudem werden zeitliche Engpässe im
Projekt ausgewiesen. Nichtkritische Vorgänge verdeutlichen Zeitspannen (sog.
Pufferzeiten), um die ein Vorgang zeitlich verschoben werden kann, ohne den
Projektabschluss zu gefährden.
Die Einbeziehung von Kosten, Personal- und Sachmittel-Kapazitäten in einer
integrierten Netzplantechnik macht die Methode zu einem umfassenden Instrument
zur Zeit-, Kosten- und Einsatzmittelplanung sowie zur Überwachung und Steuerung
von Projekten (Reichert 1994).
Der Netzplan ist die zweckmäßigste Art zur Darstellung von Vorgängen, die prozedural
voneinander abhängig sind und ein gewisses Zeitintervall zur Bearbeitung benötigen. Es wird
zwischen einer sequentiellen und parallelen Verknüpfung der Vorgänge in einem Netzplan
unterschieden. Bei einer Sequenz von Vorgängen folgen zwei oder mehrere Vorgänge zeitlich
aufeinander. Bei Parallelvorgängen erfolgt eine sog. UND-Verzweigung (siehe Folien 11-10
und 11-17) und eine entsprechende UND-Zusammenführung. Die Reihenfolgebedingung
besagt dabei, dass mehrere Vorgänge erst dann parallel bearbeitet werden können, wenn
deren Vorgänger (vorhergehende Vorgänge) abgeschlossen sind. Für eine parallelisierte
Bearbeitung müssen natürlich auch genügend Personal- und Einsatzmittel zur Verfügung
stehen.
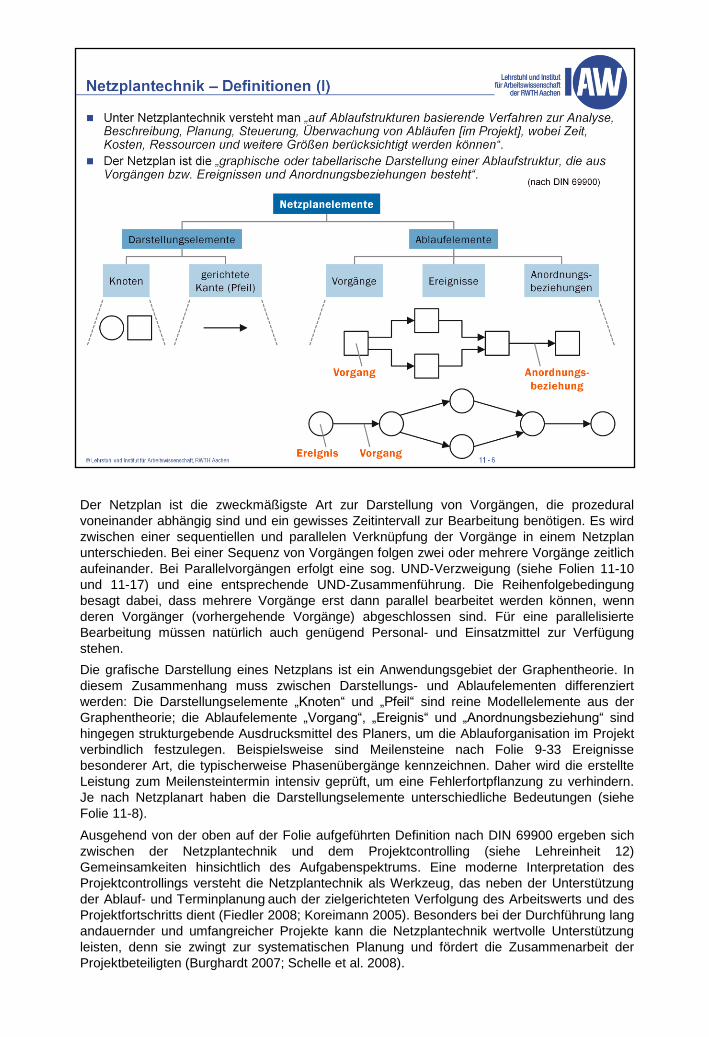
Die grafische Darstellung eines Netzplans ist ein Anwendungsgebiet der Graphentheorie. In
diesem Zusammenhang muss zwischen Darstellungs- und Ablaufelementen differenziert
werden: Die Darstellungselemente „Knoten“ und „Pfeil“ sind reine Modellelemente aus der
Graphentheorie; die Ablaufelemente „Vorgang“, „Ereignis“ und „Anordnungsbeziehung“ sind
hingegen strukturgebende Ausdrucksmittel des Planers, um die Ablauforganisation im Projekt
verbindlich festzulegen. Beispielsweise sind Meilensteine nach Folie 9-33 Ereignisse
besonderer Art, die typischerweise Phasenübergänge kennzeichnen. Daher wird die erstellte
Leistung zum Meilensteintermin intensiv geprüft, um eine Fehlerfortpflanzung zu verhindern.
Je nach Netzplanart haben die Darstellungselemente unterschiedliche Bedeutungen (siehe
Folie 11-8).
Ausgehend von der oben auf der Folie aufgeführten Definition nach DIN 69900 ergeben sich
zwischen der Netzplantechnik und dem Projektcontrolling (siehe Lehreinheit 12)
Gemeinsamkeiten hinsichtlich des Aufgabenspektrums. Eine moderne Interpretation des
Projektcontrollings versteht die Netzplantechnik als Werkzeug, das neben der Unterstützung
der Ablauf- und Terminplanung auch der zielgerichteten Verfolgung des Arbeitswerts und des
Projektfortschritts dient (Fiedler 2008; Koreimann 2005). Besonders bei der Durchführung lang
andauernder und umfangreicher Projekte kann die Netzplantechnik wertvolle Unterstützung
leisten, denn sie zwingt zur systematischen Planung und fördert die Zusammenarbeit der
Projektbeteiligten (Burghardt 2007; Schelle et al. 2008).
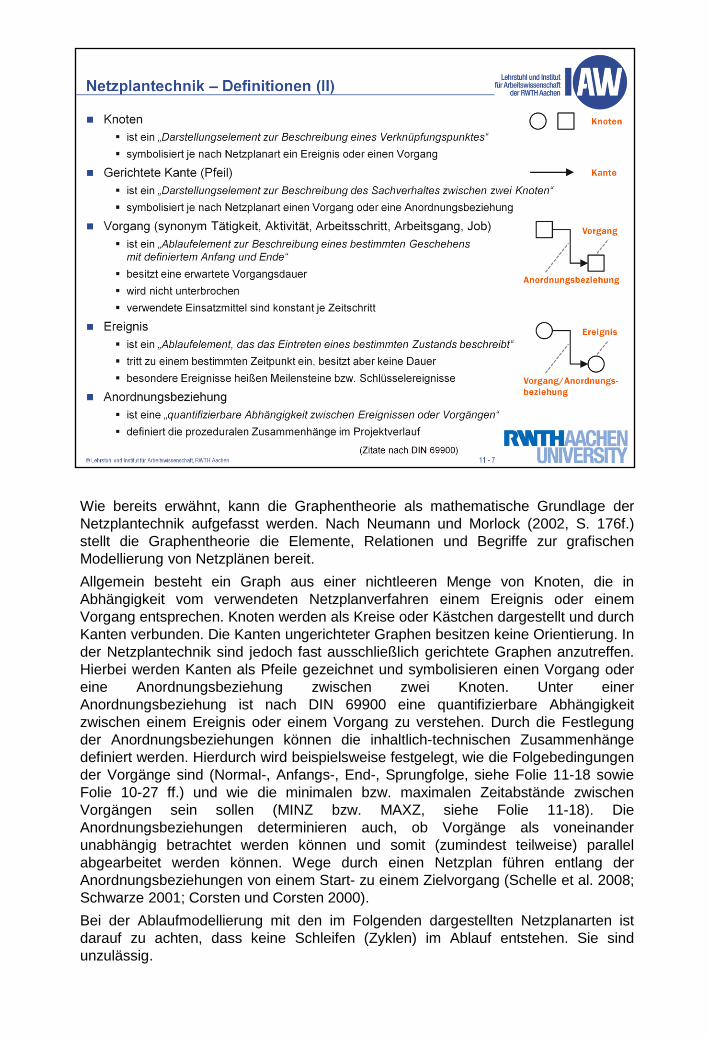
Wie bereits erwähnt, kann die Graphentheorie als mathematische Grundlage der
Netzplantechnik aufgefasst werden. Nach Neumann und Morlock (2002, S. 176f.)
stellt die Graphentheorie die Elemente, Relationen und Begriffe zur grafischen
Modellierung von Netzplänen bereit.
Allgemein besteht ein Graph aus einer nichtleeren Menge von Knoten, die in
Abhängigkeit vom verwendeten Netzplanverfahren einem Ereignis oder einem
Vorgang entsprechen. Knoten werden als Kreise oder Kästchen dargestellt und durch
Kanten verbunden. Die Kanten ungerichteter Graphen besitzen keine Orientierung. In
der Netzplantechnik sind jedoch fast ausschließlich gerichtete Graphen anzutreffen.
Hierbei werden Kanten als Pfeile gezeichnet und symbolisieren einen Vorgang oder
eine Anordnungsbeziehung zwischen zwei Knoten. Unter einer
Anordnungsbeziehung ist nach DIN 69900 eine quantifizierbare Abhängigkeit
zwischen einem Ereignis oder einem Vorgang zu verstehen. Durch die Festlegung
der Anordnungsbeziehungen können die inhaltlich-technischen Zusammenhänge
definiert werden. Hierdurch wird beispielsweise festgelegt, wie die Folgebedingungen
der Vorgänge sind (Normal-, Anfangs-, End-, Sprungfolge, siehe Folie 11-18 sowie
Folie 10-27 ff.) und wie die minimalen bzw. maximalen Zeitabstände zwischen
Vorgängen sein sollen (MINZ bzw. MAXZ, siehe Folie 11-18). Die
Anordnungsbeziehungen determinieren auch, ob Vorgänge als voneinander
unabhängig betrachtet werden können und somit (zumindest teilweise) parallel
abgearbeitet werden können. Wege durch einen Netzplan führen entlang der
Anordnungsbeziehungen von einem Start- zu einem Zielvorgang (Schelle et al. 2008;
Schwarze 2001; Corsten und Corsten 2000).
Bei der Ablaufmodellierung mit den im Folgenden dargestellten Netzplanarten ist
darauf zu achten, dass keine Schleifen (Zyklen) im Ablauf entstehen. Sie sind
unzulässig.
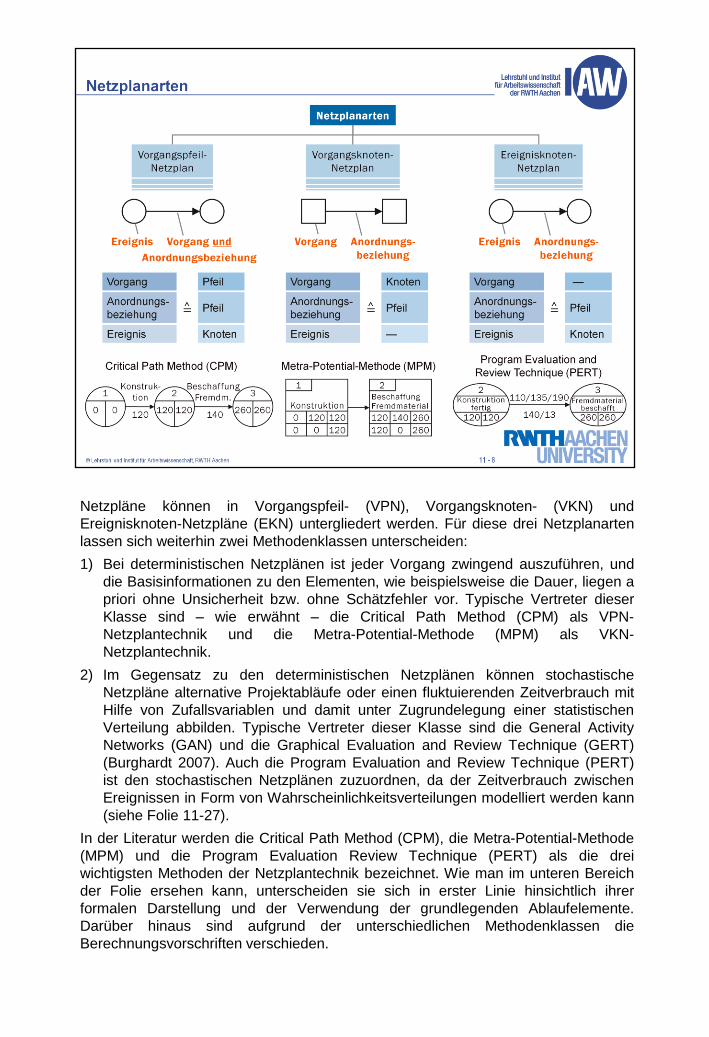
Netzpläne können in Vorgangspfeil- (VPN), Vorgangsknoten- (VKN) und
Ereignisknoten-Netzpläne (EKN) untergliedert werden. Für diese drei Netzplanarten
lassen sich weiterhin zwei Methodenklassen unterscheiden:
1) Bei deterministischen Netzplänen ist jeder Vorgang zwingend auszuführen, und
die Basisinformationen zu den Elementen, wie beispielsweise die Dauer, liegen a
priori ohne Unsicherheit bzw. ohne Schätzfehler vor. Typische Vertreter dieser
Klasse sind – wie erwähnt – die Critical Path Method (CPM) als VPN-
Netzplantechnik und die Metra-Potential-Methode (MPM) als VKN-
Netzplantechnik.
2) Im Gegensatz zu den deterministischen Netzplänen können stochastische
Netzpläne alternative Projektabläufe oder einen fluktuierenden Zeitverbrauch mit
Hilfe von Zufallsvariablen und damit unter Zugrundelegung einer statistischen
Verteilung abbilden. Typische Vertreter dieser Klasse sind die General Activity
Networks (GAN) und die Graphical Evaluation and Review Technique (GERT)
(Burghardt 2007). Auch die Program Evaluation and Review Technique (PERT)
ist den stochastischen Netzplänen zuzuordnen, da der Zeitverbrauch zwischen
Ereignissen in Form von Wahrscheinlichkeitsverteilungen modelliert werden kann
(siehe Folie 11-27).
In der Literatur werden die Critical Path Method (CPM), die Metra-Potential-Methode
(MPM) und die Program Evaluation Review Technique (PERT) als die drei
wichtigsten Methoden der Netzplantechnik bezeichnet. Wie man im unteren Bereich
der Folie ersehen kann, unterscheiden sie sich in erster Linie hinsichtlich ihrer
formalen Darstellung und der Verwendung der grundlegenden Ablaufelemente.
Darüber hinaus sind aufgrund der unterschiedlichen Methodenklassen die
Berechnungsvorschriften verschieden.

Literaturanalysen zeigen, dass CPM der bedeutendste Vertreter der Vorgangspfeil-
Netzpläne ist. Wie bereits beim historischen Abriss auf Folie 11-4 erwähnt, wurde die
Methode 1957 vom amerikanischen Chemiekonzern DuPont de Nemours in
Zusammenarbeit mit der Remington Rand Corp. entwickelt, um große
Investitionsvorhaben sowie Instandhaltungsarbeiten bei Chemieanlagen
systematisch zu planen und zu überwachen. Heutzutage wird das Verfahren auch in
der Automobilindustrie sowie der Luft- und Raumfahrtindustrie gerne für die Planung
von F&E-Projekten sowie Investitionsvorhaben genutzt.
CPM ist vor allem in angelsächsischen Ländern verbreitet.
Die Methode ist vorgangsorientiert und verwendet Pfeile zur Darstellung von
Vorgängen. Jeder Vorgang muss eineindeutig durch zwei Ereignisse berandet
(„eingerahmt“) sein. Gleichzeitig drücken die Pfeile Anordnungsbeziehungen
zwischen den als Knoten dargestellten Ereignissen aus. Die Knoten verknüpfen das
Ende eines Vorgangs mit dem Anfang eines neuen Vorgangs. Eine Verknüpfung der
Pfeile erfolgt entsprechend der Reihenfolge der Vorgänge im Projektablauf
(Schwarze 2001; Schelle et al. 2008). Die Vorgangsdauer in [Zeiteinheit] steht unter
dem Pfeil bzw. in Pfeilrichtung betrachtet rechts neben dem Pfeil.
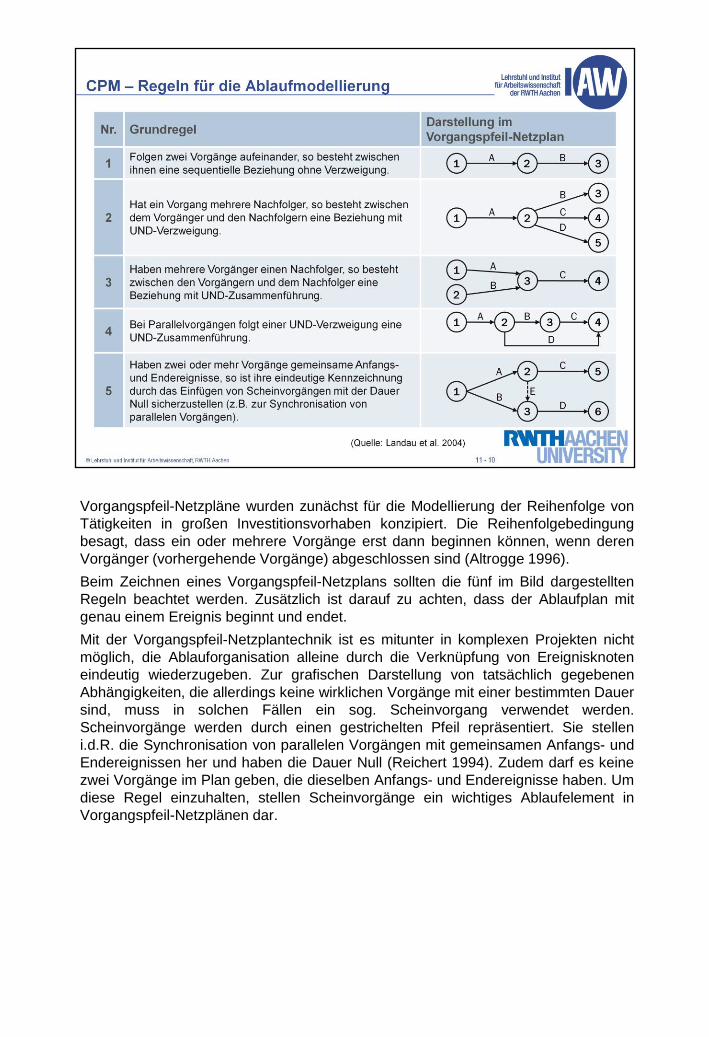
Vorgangspfeil-Netzpläne wurden zunächst für die Modellierung der Reihenfolge von
Tätigkeiten in großen Investitionsvorhaben konzipiert. Die Reihenfolgebedingung
besagt, dass ein oder mehrere Vorgänge erst dann beginnen können, wenn deren
Vorgänger (vorhergehende Vorgänge) abgeschlossen sind (Altrogge 1996).
Beim Zeichnen eines Vorgangspfeil-Netzplans sollten die fünf im Bild dargestellten
Regeln beachtet werden. Zusätzlich ist darauf zu achten, dass der Ablaufplan mit
genau einem Ereignis beginnt und endet.
Mit der Vorgangspfeil-Netzplantechnik ist es mitunter in komplexen Projekten nicht
möglich, die Ablauforganisation alleine durch die Verknüpfung von Ereignisknoten
eindeutig wiederzugeben. Zur grafischen Darstellung von tatsächlich gegebenen
Abhängigkeiten, die allerdings keine wirklichen Vorgänge mit einer bestimmten Dauer
sind, muss in solchen Fällen ein sog. Scheinvorgang verwendet werden.
Scheinvorgänge werden durch einen gestrichelten Pfeil repräsentiert. Sie stellen
i.d.R. die Synchronisation von parallelen Vorgängen mit gemeinsamen Anfangs- und
Endereignissen her und haben die Dauer Null (Reichert 1994). Zudem darf es keine
zwei Vorgänge im Plan geben, die dieselben Anfangs- und Endereignisse haben. Um
diese Regel einzuhalten, stellen Scheinvorgänge ein wichtiges Ablaufelement in
Vorgangspfeil-Netzplänen dar.
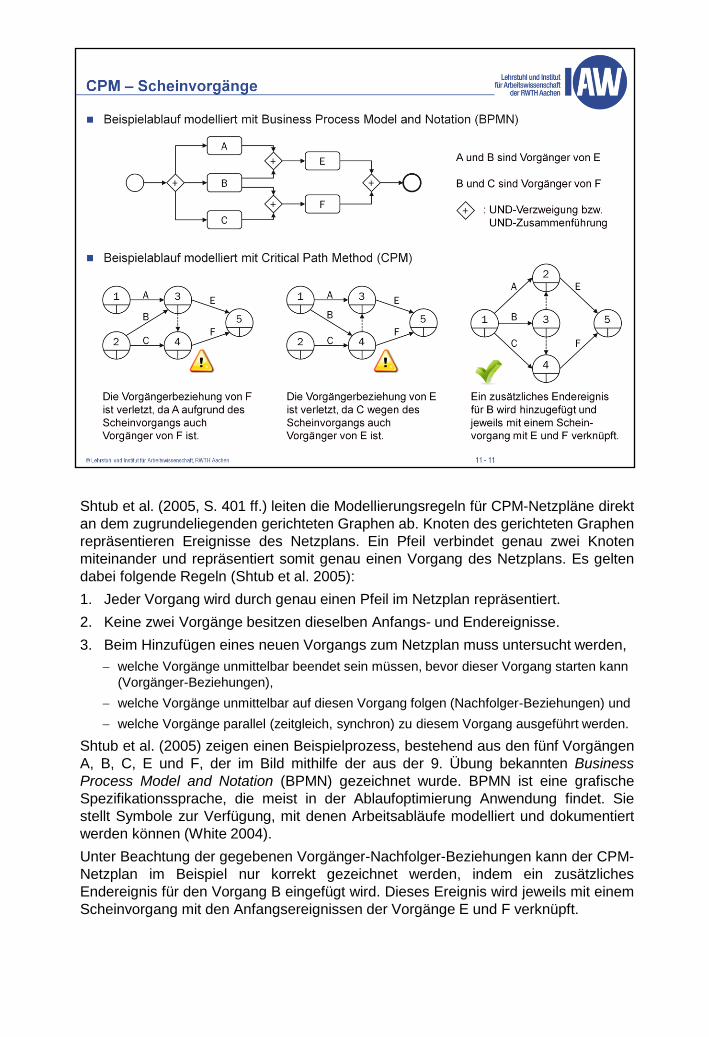
Shtub et al. (2005, S. 401 ff.) leiten die Modellierungsregeln für CPM-Netzpläne direkt
an dem zugrundeliegenden gerichteten Graphen ab. Knoten des gerichteten Graphen
repräsentieren Ereignisse des Netzplans. Ein Pfeil verbindet genau zwei Knoten
miteinander und repräsentiert somit genau einen Vorgang des Netzplans. Es gelten
dabei folgende Regeln (Shtub et al. 2005):
1. Jeder Vorgang wird durch genau einen Pfeil im Netzplan repräsentiert.
2. Keine zwei Vorgänge besitzen dieselben Anfangs- und Endereignisse.
3. Beim Hinzufügen eines neuen Vorgangs zum Netzplan muss untersucht werden,
welche Vorgänge unmittelbar beendet sein müssen, bevor dieser Vorgang starten kann
(Vorgänger-Beziehungen),
welche Vorgänge unmittelbar auf diesen Vorgang folgen (Nachfolger-Beziehungen) und
welche Vorgänge parallel (zeitgleich, synchron) zu diesem Vorgang ausgeführt werden.
Shtub et al. (2005) zeigen einen Beispielprozess, bestehend aus den fünf Vorgängen
A, B, C, E und F, der im Bild mithilfe der aus der 9. Übung bekannten Business
Process Model and Notation (BPMN) gezeichnet wurde. BPMN ist eine grafische
Spezifikationssprache, die meist in der Ablaufoptimierung Anwendung findet. Sie
stellt Symbole zur Verfügung, mit denen Arbeitsabläufe modelliert und dokumentiert
werden können (White 2004).
Unter Beachtung der gegebenen Vorgänger-Nachfolger-Beziehungen kann der CPM-
Netzplan im Beispiel nur korrekt gezeichnet werden, indem ein zusätzliches
Endereignis für den Vorgang B eingefügt wird. Dieses Ereignis wird jeweils mit einem
Scheinvorgang mit den Anfangsereignissen der Vorgänge E und F verknüpft.
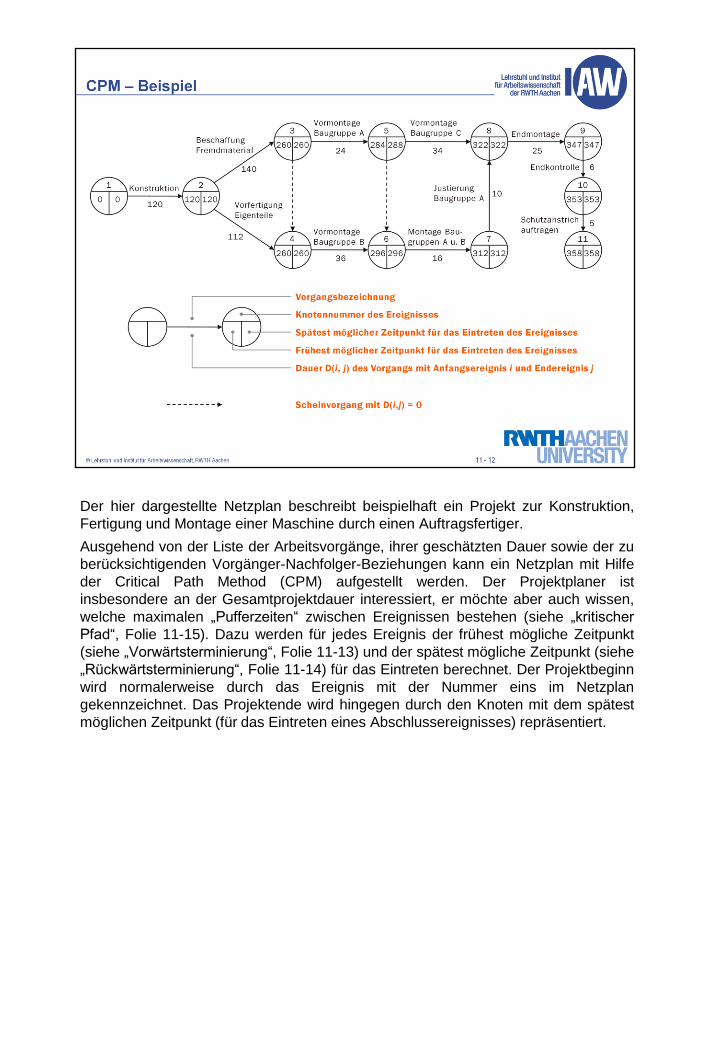
Der hier dargestellte Netzplan beschreibt beispielhaft ein Projekt zur Konstruktion,
Fertigung und Montage einer Maschine durch einen Auftragsfertiger.
Ausgehend von der Liste der Arbeitsvorgänge, ihrer geschätzten Dauer sowie der zu
berücksichtigenden Vorgänger-Nachfolger-Beziehungen kann ein Netzplan mit Hilfe
der Critical Path Method (CPM) aufgestellt werden. Der Projektplaner ist
insbesondere an der Gesamtprojektdauer interessiert, er möchte aber auch wissen,
welche maximalen „Pufferzeiten“ zwischen Ereignissen bestehen (siehe „kritischer
Pfad“, Folie 11-15). Dazu werden für jedes Ereignis der frühest mögliche Zeitpunkt
(siehe „Vorwärtsterminierung“, Folie 11-13) und der spätest mögliche Zeitpunkt (siehe
„Rückwärtsterminierung“, Folie 11-14) für das Eintreten berechnet. Der Projektbeginn
wird normalerweise durch das Ereignis mit der Nummer eins im Netzplan
gekennzeichnet. Das Projektende wird hingegen durch den Knoten mit dem spätest
möglichen Zeitpunkt (für das Eintreten eines Abschlussereignisses) repräsentiert.
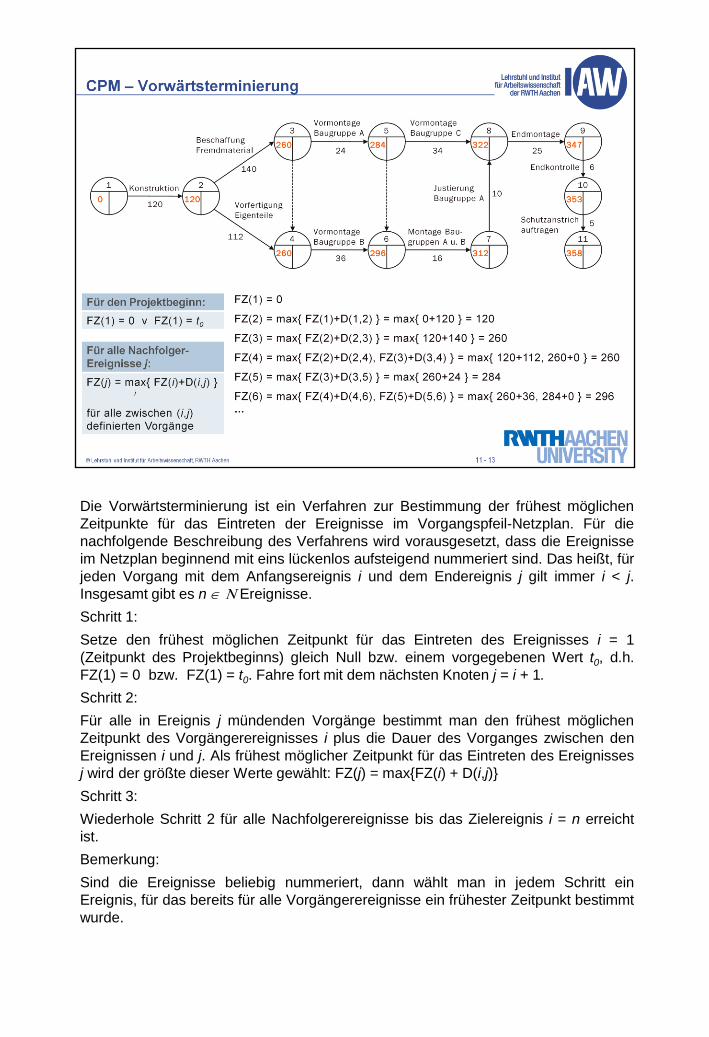
Die Vorwärtsterminierung ist ein Verfahren zur Bestimmung der frühest möglichen
Zeitpunkte für das Eintreten der Ereignisse im Vorgangspfeil-Netzplan. Für die
nachfolgende Beschreibung des Verfahrens wird vorausgesetzt, dass die Ereignisse
im Netzplan beginnend mit eins lückenlos aufsteigend nummeriert sind. Das heißt, für
jeden Vorgang mit dem Anfangsereignis i und dem Endereignis j gilt immer i < j.
Insgesamt gibt es n Ereignisse.
Schritt 1:
Setze den frühest möglichen Zeitpunkt für das Eintreten des Ereignisses i = 1
(Zeitpunkt des Projektbeginns) gleich Null bzw. einem vorgegebenen Wert t0, d.h.
FZ(1) = 0 bzw. FZ(1) = t0. Fahre fort mit dem nächsten Knoten j = i + 1.
Schritt 2:
Für alle in Ereignis j mündenden Vorgänge bestimmt man den frühest möglichen
Zeitpunkt des Vorgängerereignisses i plus die Dauer des Vorganges zwischen den
Ereignissen i und j. Als frühest möglicher Zeitpunkt für das Eintreten des Ereignisses
j wird der größte dieser Werte gewählt: FZ(j) = max{FZ(i) + D(i,j)}
Schritt 3:
Wiederhole Schritt 2 für alle Nachfolgerereignisse bis das Zielereignis i = n erreicht
ist.
Bemerkung:
Sind die Ereignisse beliebig nummeriert, dann wählt man in jedem Schritt ein
Ereignis, für das bereits für alle Vorgängerereignisse ein frühester Zeitpunkt bestimmt
wurde.
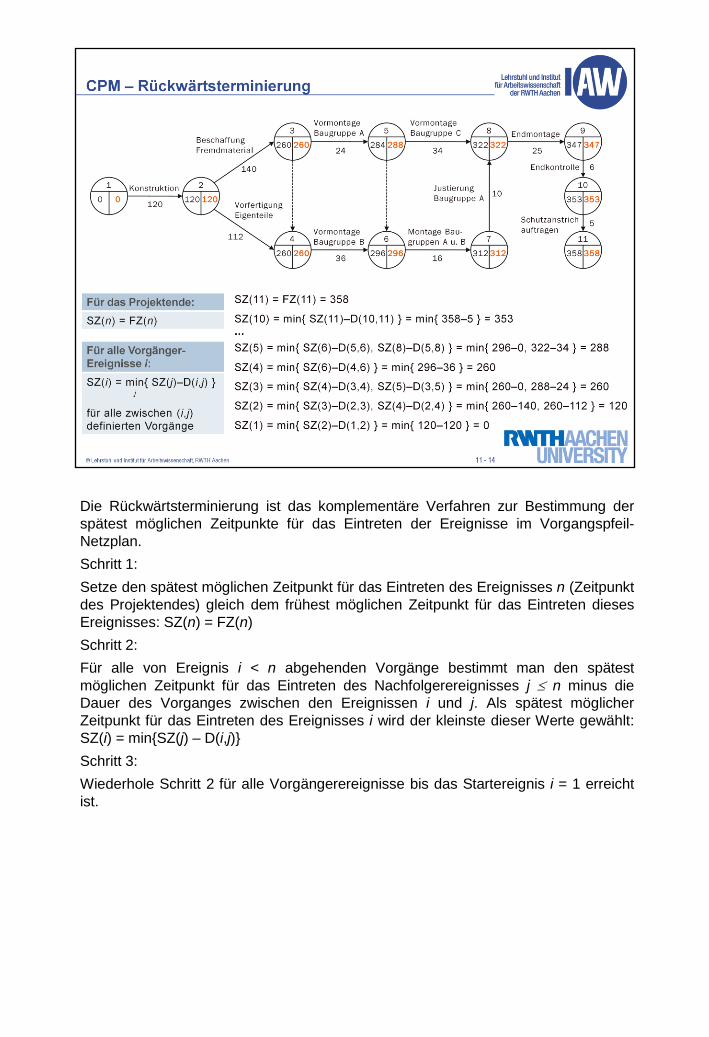
Die Rückwärtsterminierung ist das komplementäre Verfahren zur Bestimmung der
spätest möglichen Zeitpunkte für das Eintreten der Ereignisse im Vorgangspfeil-
Netzplan.
Schritt 1:
Setze den spätest möglichen Zeitpunkt für das Eintreten des Ereignisses n (Zeitpunkt
des Projektendes) gleich dem frühest möglichen Zeitpunkt für das Eintreten dieses
Ereignisses: SZ(n) = FZ(n)
Schritt 2:
Für alle von Ereignis i < n abgehenden Vorgänge bestimmt man den spätest
möglichen Zeitpunkt für das Eintreten des Nachfolgerereignisses j n minus die
Dauer des Vorganges zwischen den Ereignissen i und j. Als spätest möglicher
Zeitpunkt für das Eintreten des Ereignisses i wird der kleinste dieser Werte gewählt:
SZ(i) = min{SZ(j) – D(i,j)}
Schritt 3:
Wiederhole Schritt 2 für alle Vorgängerereignisse bis das Startereignis i = 1 erreicht
ist.
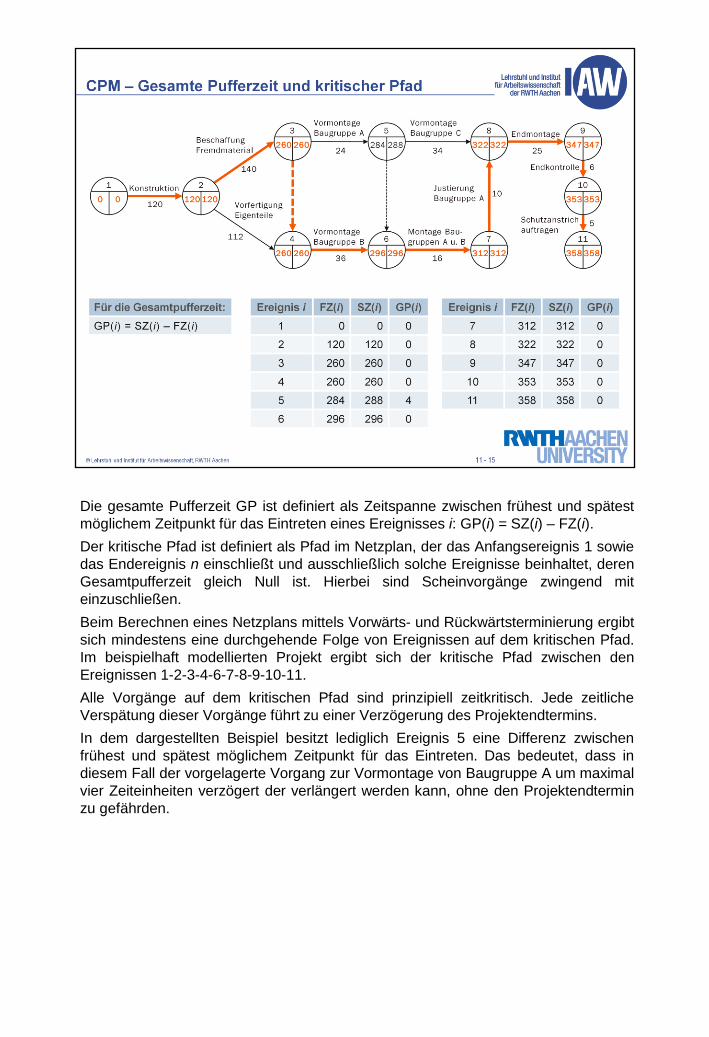
Die gesamte Pufferzeit GP ist definiert als Zeitspanne zwischen frühest und spätest
möglichem Zeitpunkt für das Eintreten eines Ereignisses i: GP(i) = SZ(i) – FZ(i).
Der kritische Pfad ist definiert als Pfad im Netzplan, der das Anfangsereignis 1 sowie
das Endereignis n einschließt und ausschließlich solche Ereignisse beinhaltet, deren
Gesamtpufferzeit gleich Null ist. Hierbei sind Scheinvorgänge zwingend mit
einzuschließen.
Beim Berechnen eines Netzplans mittels Vorwärts- und Rückwärtsterminierung ergibt
sich mindestens eine durchgehende Folge von Ereignissen auf dem kritischen Pfad.
Im beispielhaft modellierten Projekt ergibt sich der kritische Pfad zwischen den
Ereignissen 1-2-3-4-6-7-8-9-10-11.
Alle Vorgänge auf dem kritischen Pfad sind prinzipiell zeitkritisch. Jede zeitliche
Verspätung dieser Vorgänge führt zu einer Verzögerung des Projektendtermins.
In dem dargestellten Beispiel besitzt lediglich Ereignis 5 eine Differenz zwischen
frühest und spätest möglichem Zeitpunkt für das Eintreten. Das bedeutet, dass in
diesem Fall der vorgelagerte Vorgang zur Vormontage von Baugruppe A um maximal
vier Zeiteinheiten verzögert der verlängert werden kann, ohne den Projektendtermin
zu gefährden.
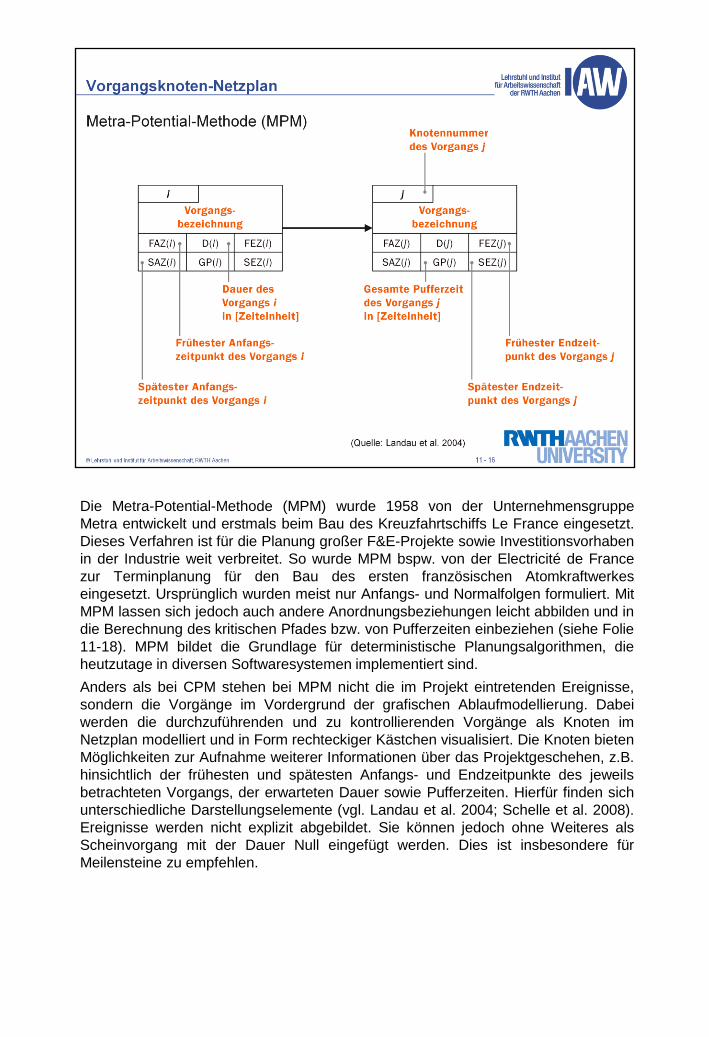
Die Metra-Potential-Methode (MPM) wurde 1958 von der Unternehmensgruppe
Metra entwickelt und erstmals beim Bau des Kreuzfahrtschiffs Le France eingesetzt.
Dieses Verfahren ist für die Planung großer F&E-Projekte sowie Investitionsvorhaben
in der Industrie weit verbreitet. So wurde MPM bspw. von der Electricité de France
zur Terminplanung für den Bau des ersten französischen Atomkraftwerkes
eingesetzt. Ursprünglich wurden meist nur Anfangs- und Normalfolgen formuliert. Mit
MPM lassen sich jedoch auch andere Anordnungsbeziehungen leicht abbilden und in
die Berechnung des kritischen Pfades bzw. von Pufferzeiten einbeziehen (siehe Folie
11-18). MPM bildet die Grundlage für deterministische Planungsalgorithmen, die
heutzutage in diversen Softwaresystemen implementiert sind.
Anders als bei CPM stehen bei MPM nicht die im Projekt eintretenden Ereignisse,
sondern die Vorgänge im Vordergrund der grafischen Ablaufmodellierung. Dabei
werden die durchzuführenden und zu kontrollierenden Vorgänge als Knoten im
Netzplan modelliert und in Form rechteckiger Kästchen visualisiert. Die Knoten bieten
Möglichkeiten zur Aufnahme weiterer Informationen über das Projektgeschehen, z.B.
hinsichtlich der frühesten und spätesten Anfangs- und Endzeitpunkte des jeweils
betrachteten Vorgangs, der erwarteten Dauer sowie Pufferzeiten. Hierfür finden sich
unterschiedliche Darstellungselemente (vgl. Landau et al. 2004; Schelle et al. 2008).
Ereignisse werden nicht explizit abgebildet. Sie können jedoch ohne Weiteres als
Scheinvorgang mit der Dauer Null eingefügt werden. Dies ist insbesondere für
Meilensteine zu empfehlen.
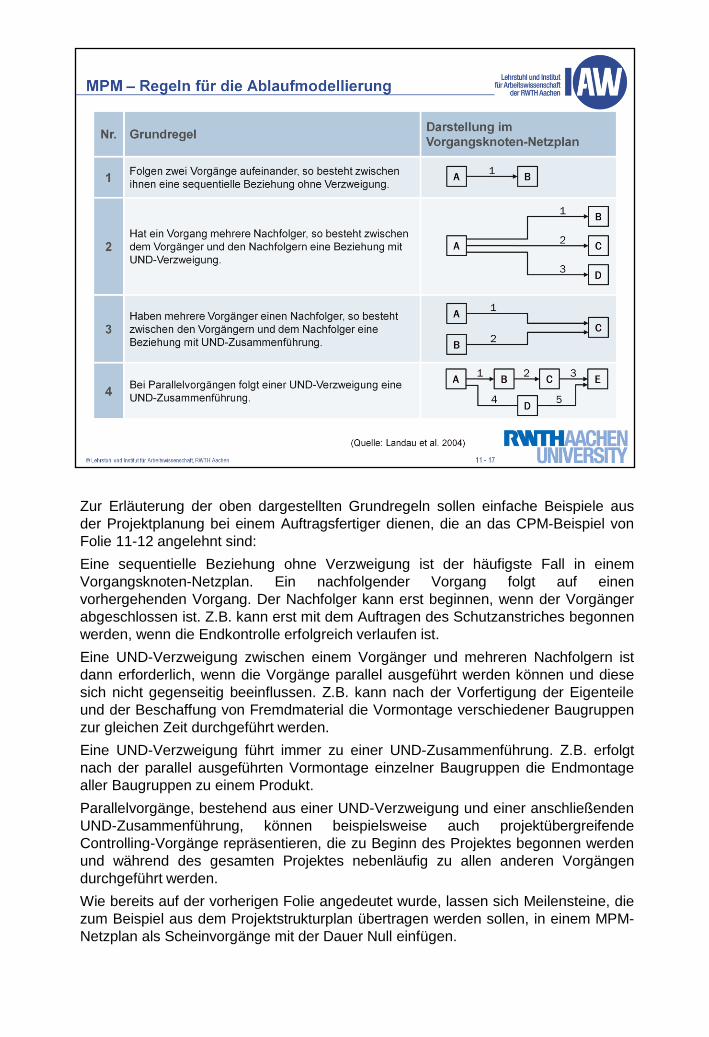
Zur Erläuterung der oben dargestellten Grundregeln sollen einfache Beispiele aus
der Projektplanung bei einem Auftragsfertiger dienen, die an das CPM-Beispiel von
Folie 11-12 angelehnt sind:
Eine sequentielle Beziehung ohne Verzweigung ist der häufigste Fall in einem
Vorgangsknoten-Netzplan. Ein nachfolgender Vorgang folgt auf einen
vorhergehenden Vorgang. Der Nachfolger kann erst beginnen, wenn der Vorgänger
abgeschlossen ist. Z.B. kann erst mit dem Auftragen des Schutzanstriches begonnen
werden, wenn die Endkontrolle erfolgreich verlaufen ist.
Eine UND-Verzweigung zwischen einem Vorgänger und mehreren Nachfolgern ist
dann erforderlich, wenn die Vorgänge parallel ausgeführt werden können und diese
sich nicht gegenseitig beeinflussen. Z.B. kann nach der Vorfertigung der Eigenteile
und der Beschaffung von Fremdmaterial die Vormontage verschiedener Baugruppen
zur gleichen Zeit durchgeführt werden.
Eine UND-Verzweigung führt immer zu einer UND-Zusammenführung. Z.B. erfolgt
nach der parallel ausgeführten Vormontage einzelner Baugruppen die Endmontage
aller Baugruppen zu einem Produkt.
Parallelvorgänge, bestehend aus einer UND-Verzweigung und einer anschließenden
UND-Zusammenführung, können beispielsweise auch projektübergreifende
Controlling-Vorgänge repräsentieren, die zu Beginn des Projektes begonnen werden
und während des gesamten Projektes nebenläufig zu allen anderen Vorgängen
durchgeführt werden.
Wie bereits auf der vorherigen Folie angedeutet wurde, lassen sich Meilensteine, die
zum Beispiel aus dem Projektstrukturplan übertragen werden sollen, in einem MPM-
Netzplan als Scheinvorgänge mit der Dauer Null einfügen.
Wie bereits in Lehreinheit 10 erläutert wurde, ist es in der Praxis häufig notwendig,
Vorgänge teilweise überlappend auszuführen bzw. abzuarbeiten, beispielsweise bei
der simultanen Produkt- und Prozessentwicklung. Zudem muss es möglich sein,
zeitliche Mindest- und Höchstabstände zwischen einzelnen Vorgängen zu definieren,
die ein Projektteam oder mitarbeiter einzuhalten hat.
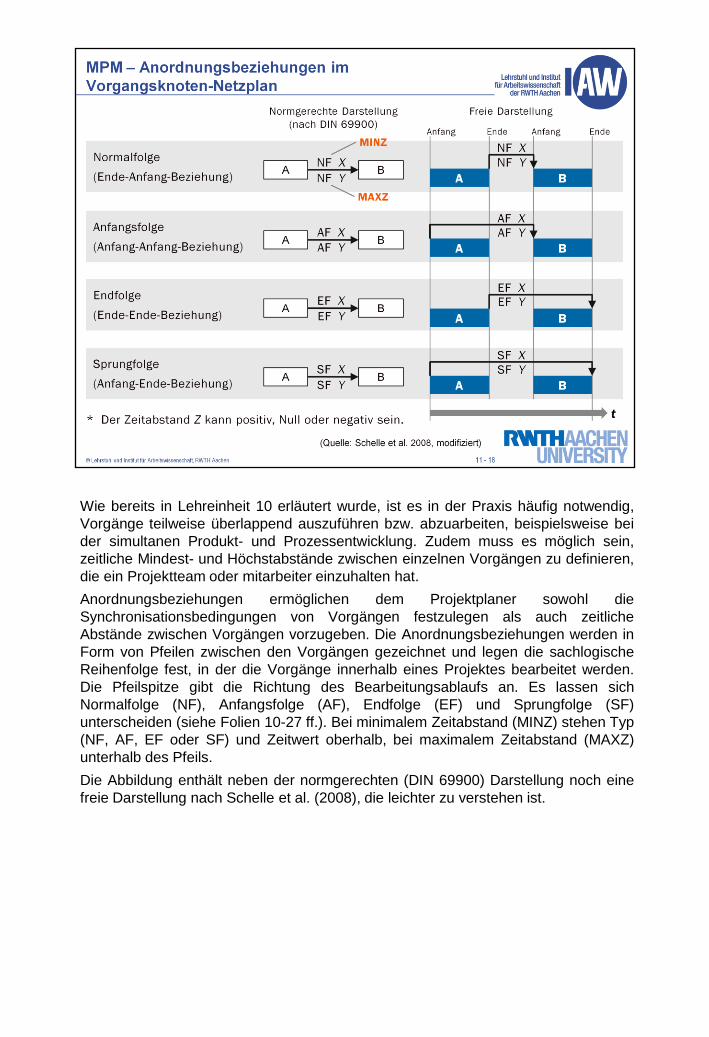
Anordnungsbeziehungen ermöglichen dem Projektplaner sowohl die
Synchronisationsbedingungen von Vorgängen festzulegen als auch zeitliche
Abstände zwischen Vorgängen vorzugeben. Die Anordnungsbeziehungen werden in
Form von Pfeilen zwischen den Vorgängen gezeichnet und legen die sachlogische
Reihenfolge fest, in der die Vorgänge innerhalb eines Projektes bearbeitet werden.
Die Pfeilspitze gibt die Richtung des Bearbeitungsablaufs an. Es lassen sich
Normalfolge (NF), Anfangsfolge (AF), Endfolge (EF) und Sprungfolge (SF)
unterscheiden (siehe Folien 10-27 ff.). Bei minimalem Zeitabstand (MINZ) stehen Typ
(NF, AF, EF oder SF) und Zeitwert oberhalb, bei maximalem Zeitabstand (MAXZ)
unterhalb des Pfeils.
Die Abbildung enthält neben der normgerechten (DIN 69900) Darstellung noch eine
freie Darstellung nach Schelle et al. (2008), die leichter zu verstehen ist.
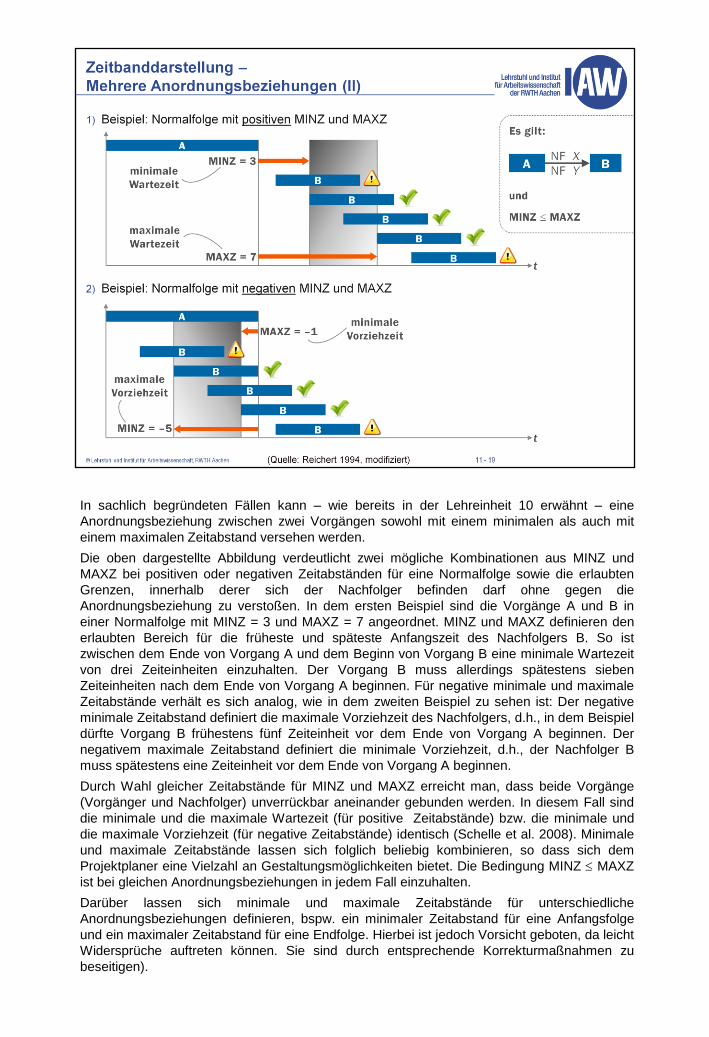
In sachlich begründeten Fällen kann – wie bereits in der Lehreinheit 10 erwähnt – eine
Anordnungsbeziehung zwischen zwei Vorgängen sowohl mit einem minimalen als auch mit
einem maximalen Zeitabstand versehen werden.
Die oben dargestellte Abbildung verdeutlicht zwei mögliche Kombinationen aus MINZ und
MAXZ bei positiven oder negativen Zeitabständen für eine Normalfolge sowie die erlaubten
Grenzen, innerhalb derer sich der Nachfolger befinden darf ohne gegen die
Anordnungsbeziehung zu verstoßen. In dem ersten Beispiel sind die Vorgänge A und B in
einer Normalfolge mit MINZ = 3 und MAXZ = 7 angeordnet. MINZ und MAXZ definieren den
erlaubten Bereich für die früheste und späteste Anfangszeit des Nachfolgers B. So ist
zwischen dem Ende von Vorgang A und dem Beginn von Vorgang B eine minimale Wartezeit
von drei Zeiteinheiten einzuhalten. Der Vorgang B muss allerdings spätestens sieben
Zeiteinheiten nach dem Ende von Vorgang A beginnen. Für negative minimale und maximale
Zeitabstände verhält es sich analog, wie in dem zweiten Beispiel zu sehen ist: Der negative
minimale Zeitabstand definiert die maximale Vorziehzeit des Nachfolgers, d.h., in dem Beispiel
dürfte Vorgang B frühestens fünf Zeiteinheit vor dem Ende von Vorgang A beginnen. Der
negativem maximale Zeitabstand definiert die minimale Vorziehzeit, d.h., der Nachfolger B
muss spätestens eine Zeiteinheit vor dem Ende von Vorgang A beginnen.
Durch Wahl gleicher Zeitabstände für MINZ und MAXZ erreicht man, dass beide Vorgänge
(Vorgänger und Nachfolger) unverrückbar aneinander gebunden werden. In diesem Fall sind
die minimale und die maximale Wartezeit (für positive Zeitabstände) bzw. die minimale und
die maximale Vorziehzeit (für negative Zeitabstände) identisch (Schelle et al. 2008). Minimale
und maximale Zeitabstände lassen sich folglich beliebig kombinieren, so dass sich dem
Projektplaner eine Vielzahl an Gestaltungsmöglichkeiten bietet. Die Bedingung MINZ MAXZ
ist bei gleichen Anordnungsbeziehungen in jedem Fall einzuhalten.
Darüber lassen sich minimale und maximale Zeitabstände für unterschiedliche
Anordnungsbeziehungen definieren, bspw. ein minimaler Zeitabstand für eine Anfangsfolge
und ein maximaler Zeitabstand für eine Endfolge. Hierbei ist jedoch Vorsicht geboten, da leicht
Widersprüche auftreten können. Sie sind durch entsprechende Korrekturmaßnahmen zu
beseitigen).
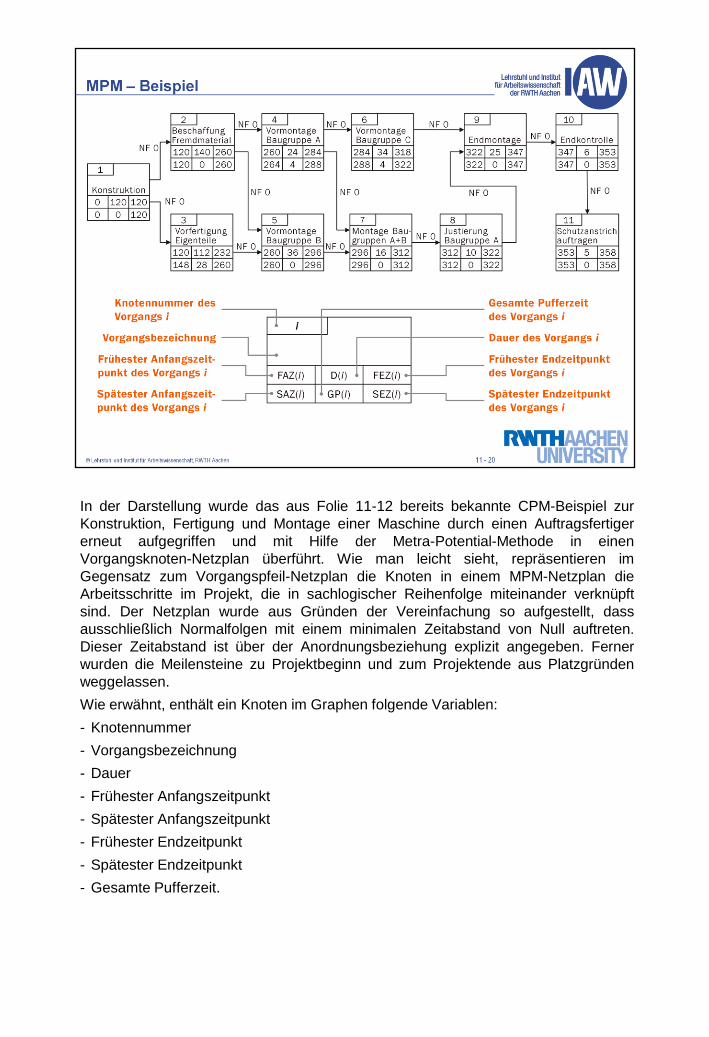
In der Darstellung wurde das aus Folie 11-12 bereits bekannte CPM-Beispiel zur
Konstruktion, Fertigung und Montage einer Maschine durch einen Auftragsfertiger
erneut aufgegriffen und mit Hilfe der Metra-Potential-Methode in einen
Vorgangsknoten-Netzplan überführt. Wie man leicht sieht, repräsentieren im
Gegensatz zum Vorgangspfeil-Netzplan die Knoten in einem MPM-Netzplan die
Arbeitsschritte im Projekt, die in sachlogischer Reihenfolge miteinander verknüpft
sind. Der Netzplan wurde aus Gründen der Vereinfachung so aufgestellt, dass
ausschließlich Normalfolgen mit einem minimalen Zeitabstand von Null auftreten.
Dieser Zeitabstand ist über der Anordnungsbeziehung explizit angegeben. Ferner
wurden die Meilensteine zu Projektbeginn und zum Projektende aus Platzgründen
weggelassen.
Wie erwähnt, enthält ein Knoten im Graphen folgende Variablen:
- Knotennummer
- Vorgangsbezeichnung
- Dauer
- Frühester Anfangszeitpunkt
- Spätester Anfangszeitpunkt
- Frühester Endzeitpunkt
- Spätester Endzeitpunkt
- Gesamte Pufferzeit.
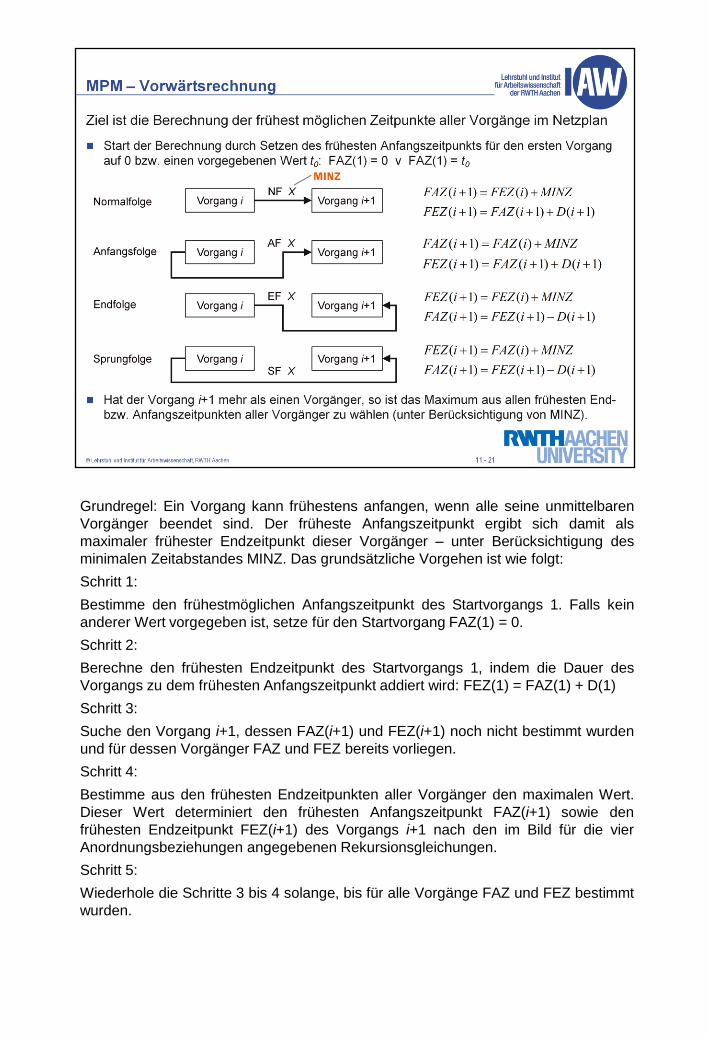
Grundregel: Ein Vorgang kann frühestens anfangen, wenn alle seine unmittelbaren
Vorgänger beendet sind. Der früheste Anfangszeitpunkt ergibt sich damit als
maximaler frühester Endzeitpunkt dieser Vorgänger – unter Berücksichtigung des
minimalen Zeitabstandes MINZ. Das grundsätzliche Vorgehen ist wie folgt:
Schritt 1:
Bestimme den frühestmöglichen Anfangszeitpunkt des Startvorgangs 1. Falls kein
anderer Wert vorgegeben ist, setze für den Startvorgang FAZ(1) = 0.
Schritt 2:
Berechne den frühesten Endzeitpunkt des Startvorgangs 1, indem die Dauer des
Vorgangs zu dem frühesten Anfangszeitpunkt addiert wird: FEZ(1) = FAZ(1) + D(1)
Schritt 3:
Suche den Vorgang i+1, dessen FAZ(i+1) und FEZ(i+1) noch nicht bestimmt wurden
und für dessen Vorgänger FAZ und FEZ bereits vorliegen.
Schritt 4:
Bestimme aus den frühesten Endzeitpunkten aller Vorgänger den maximalen Wert.
Dieser Wert determiniert den frühesten Anfangszeitpunkt FAZ(i+1) sowie den
frühesten Endzeitpunkt FEZ(i+1) des Vorgangs i+1 nach den im Bild für die vier
Anordnungsbeziehungen angegebenen Rekursionsgleichungen.
Schritt 5:
Wiederhole die Schritte 3 bis 4 solange, bis für alle Vorgänge FAZ und FEZ bestimmt
wurden.
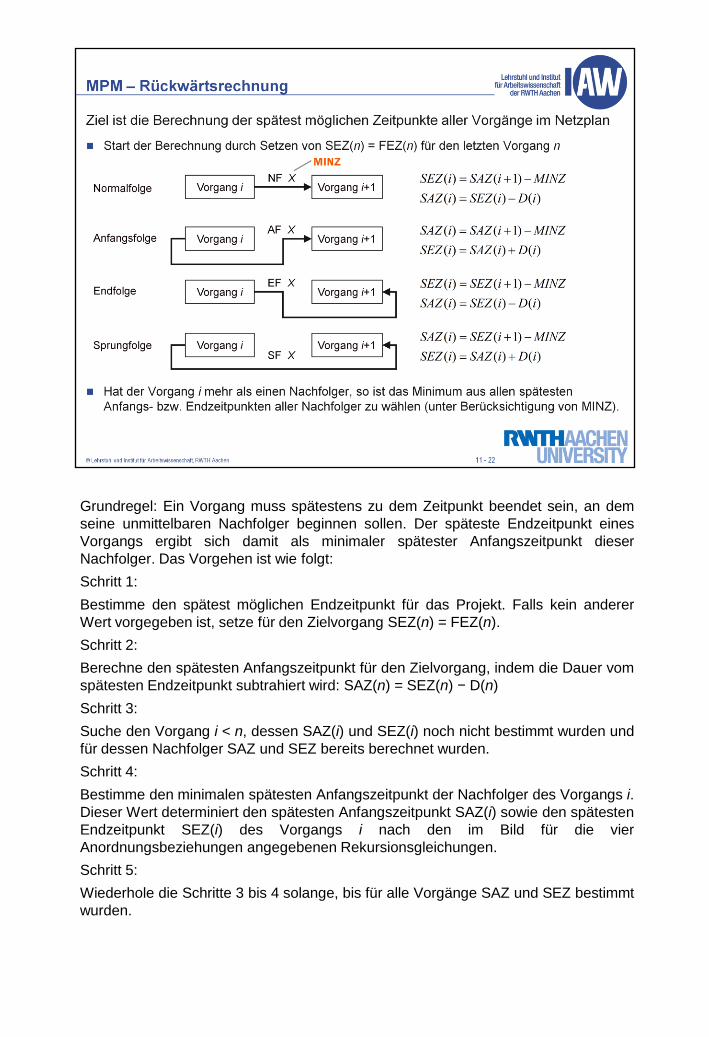
Grundregel: Ein Vorgang muss spätestens zu dem Zeitpunkt beendet sein, an dem
seine unmittelbaren Nachfolger beginnen sollen. Der späteste Endzeitpunkt eines
Vorgangs ergibt sich damit als minimaler spätester Anfangszeitpunkt dieser
Nachfolger. Das Vorgehen ist wie folgt:
Schritt 1:
Bestimme den spätest möglichen Endzeitpunkt für das Projekt. Falls kein anderer
Wert vorgegeben ist, setze für den Zielvorgang SEZ(n) = FEZ(n).
Schritt 2:
Berechne den spätesten Anfangszeitpunkt für den Zielvorgang, indem die Dauer vom
spätesten Endzeitpunkt subtrahiert wird: SAZ(n) = SEZ(n) − D(n)
Schritt 3:
Suche den Vorgang i < n, dessen SAZ(i) und SEZ(i) noch nicht bestimmt wurden und
für dessen Nachfolger SAZ und SEZ bereits berechnet wurden.
Schritt 4:
Bestimme den minimalen spätesten Anfangszeitpunkt der Nachfolger des Vorgangs i.
Dieser Wert determiniert den spätesten Anfangszeitpunkt SAZ(i) sowie den spätesten
Endzeitpunkt SEZ(i) des Vorgangs i nach den im Bild für die vier
Anordnungsbeziehungen angegebenen Rekursionsgleichungen.
Schritt 5:
Wiederhole die Schritte 3 bis 4 solange, bis für alle Vorgänge SAZ und SEZ bestimmt
wurden.
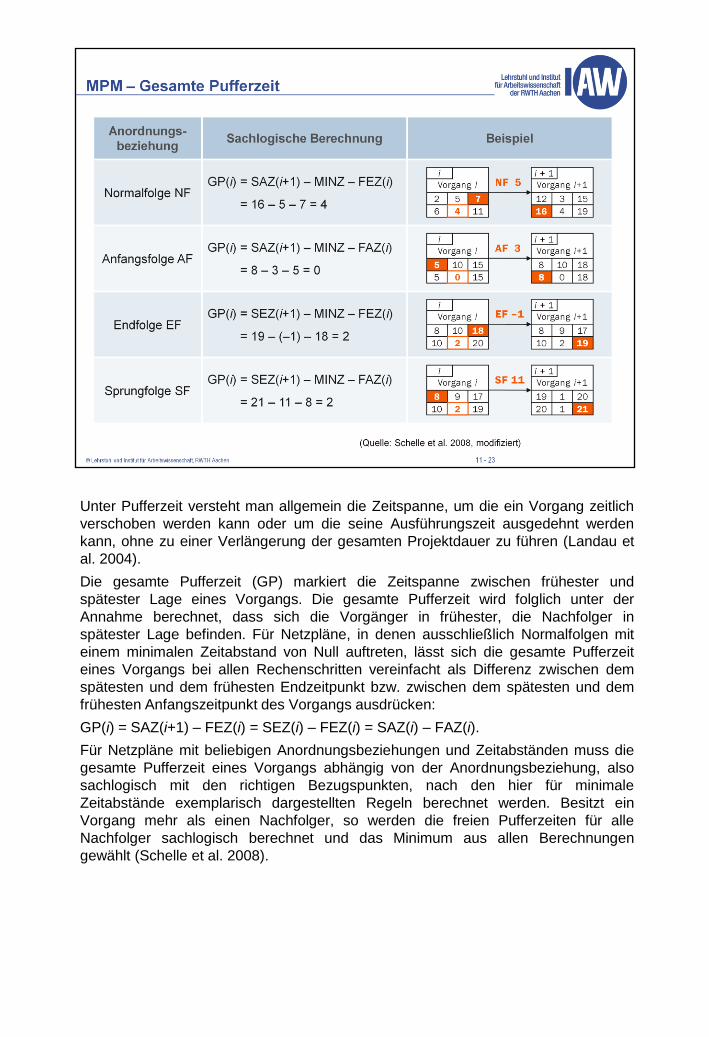
Unter Pufferzeit versteht man allgemein die Zeitspanne, um die ein Vorgang zeitlich
verschoben werden kann oder um die seine Ausführungszeit ausgedehnt werden
kann, ohne zu einer Verlängerung der gesamten Projektdauer zu führen (Landau et
al. 2004).
Die gesamte Pufferzeit (GP) markiert die Zeitspanne zwischen frühester und
spätester Lage eines Vorgangs. Die gesamte Pufferzeit wird folglich unter der
Annahme berechnet, dass sich die Vorgänger in frühester, die Nachfolger in
spätester Lage befinden. Für Netzpläne, in denen ausschließlich Normalfolgen mit
einem minimalen Zeitabstand von Null auftreten, lässt sich die gesamte Pufferzeit
eines Vorgangs bei allen Rechenschritten vereinfacht als Differenz zwischen dem
spätesten und dem frühesten Endzeitpunkt bzw. zwischen dem spätesten und dem
frühesten Anfangszeitpunkt des Vorgangs ausdrücken:
GP(i) = SAZ(i+1) – FEZ(i) = SEZ(i) – FEZ(i) = SAZ(i) – FAZ(i).
Für Netzpläne mit beliebigen Anordnungsbeziehungen und Zeitabständen muss die
gesamte Pufferzeit eines Vorgangs abhängig von der Anordnungsbeziehung, also
sachlogisch mit den richtigen Bezugspunkten, nach den hier für minimale
Zeitabstände exemplarisch dargestellten Regeln berechnet werden. Besitzt ein
Vorgang mehr als einen Nachfolger, so werden die freien Pufferzeiten für alle
Nachfolger sachlogisch berechnet und das Minimum aus allen Berechnungen
gewählt (Schelle et al. 2008).
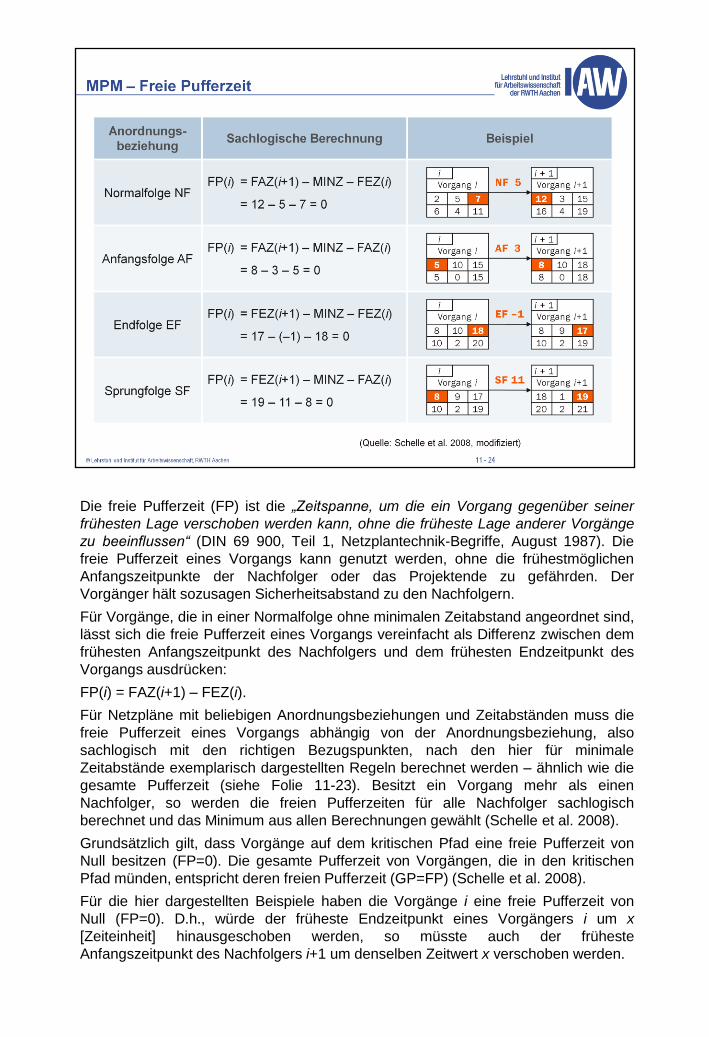
Die freie Pufferzeit (FP) ist die „Zeitspanne, um die ein Vorgang gegenüber seiner
frühesten Lage verschoben werden kann, ohne die früheste Lage anderer Vorgänge
zu beeinflussen“ (DIN 69 900, Teil 1, Netzplantechnik-Begriffe, August 1987). Die
freie Pufferzeit eines Vorgangs kann genutzt werden, ohne die frühestmöglichen
Anfangszeitpunkte der Nachfolger oder das Projektende zu gefährden. Der
Vorgänger hält sozusagen Sicherheitsabstand zu den Nachfolgern.
Für Vorgänge, die in einer Normalfolge ohne minimalen Zeitabstand angeordnet sind,
lässt sich die freie Pufferzeit eines Vorgangs vereinfacht als Differenz zwischen dem
frühesten Anfangszeitpunkt des Nachfolgers und dem frühesten Endzeitpunkt des
Vorgangs ausdrücken:
FP(i) = FAZ(i+1) – FEZ(i).
Für Netzpläne mit beliebigen Anordnungsbeziehungen und Zeitabständen muss die
freie Pufferzeit eines Vorgangs abhängig von der Anordnungsbeziehung, also
sachlogisch mit den richtigen Bezugspunkten, nach den hier für minimale
Zeitabstände exemplarisch dargestellten Regeln berechnet werden – ähnlich wie die
gesamte Pufferzeit (siehe Folie 11-23). Besitzt ein Vorgang mehr als einen
Nachfolger, so werden die freien Pufferzeiten für alle Nachfolger sachlogisch
berechnet und das Minimum aus allen Berechnungen gewählt (Schelle et al. 2008).
Grundsätzlich gilt, dass Vorgänge auf dem kritischen Pfad eine freie Pufferzeit von
Null besitzen (FP=0). Die gesamte Pufferzeit von Vorgängen, die in den kritischen
Pfad münden, entspricht deren freien Pufferzeit (GP=FP) (Schelle et al. 2008).
Für die hier dargestellten Beispiele haben die Vorgänge i eine freie Pufferzeit von
Null (FP=0). D.h., würde der früheste Endzeitpunkt eines Vorgängers i um x
[Zeiteinheit] hinausgeschoben werden, so müsste auch der früheste
Anfangszeitpunkt des Nachfolgers i+1 um denselben Zeitwert x verschoben werden.
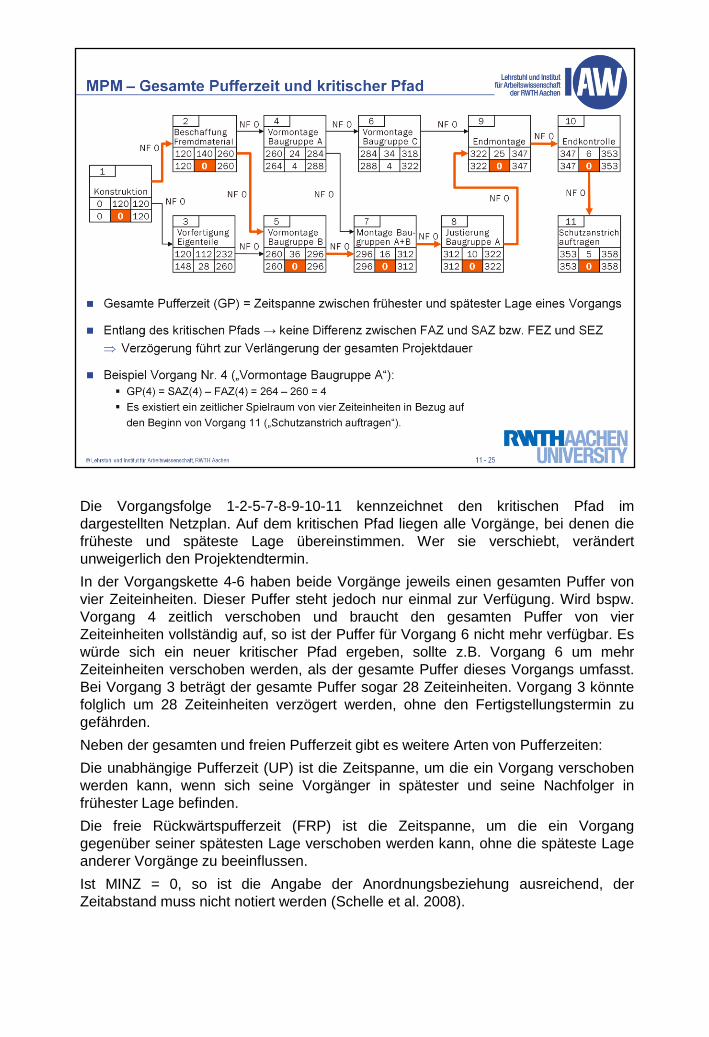
Die Vorgangsfolge 1-2-5-7-8-9-10-11 kennzeichnet den kritischen Pfad im
dargestellten Netzplan. Auf dem kritischen Pfad liegen alle Vorgänge, bei denen die
früheste und späteste Lage übereinstimmen. Wer sie verschiebt, verändert
unweigerlich den Projektendtermin.
In der Vorgangskette 4-6 haben beide Vorgänge jeweils einen gesamten Puffer von
vier Zeiteinheiten. Dieser Puffer steht jedoch nur einmal zur Verfügung. Wird bspw.
Vorgang 4 zeitlich verschoben und braucht den gesamten Puffer von vier
Zeiteinheiten vollständig auf, so ist der Puffer für Vorgang 6 nicht mehr verfügbar. Es
würde sich ein neuer kritischer Pfad ergeben, sollte z.B. Vorgang 6 um mehr
Zeiteinheiten verschoben werden, als der gesamte Puffer dieses Vorgangs umfasst.
Bei Vorgang 3 beträgt der gesamte Puffer sogar 28 Zeiteinheiten. Vorgang 3 könnte
folglich um 28 Zeiteinheiten verzögert werden, ohne den Fertigstellungstermin zu
gefährden.
Neben der gesamten und freien Pufferzeit gibt es weitere Arten von Pufferzeiten:
Die unabhängige Pufferzeit (UP) ist die Zeitspanne, um die ein Vorgang verschoben
werden kann, wenn sich seine Vorgänger in spätester und seine Nachfolger in
frühester Lage befinden.
Die freie Rückwärtspufferzeit (FRP) ist die Zeitspanne, um die ein Vorgang
gegenüber seiner spätesten Lage verschoben werden kann, ohne die späteste Lage
anderer Vorgänge zu beeinflussen.
Ist MINZ = 0, so ist die Angabe der Anordnungsbeziehung ausreichend, der
Zeitabstand muss nicht notiert werden (Schelle et al. 2008).
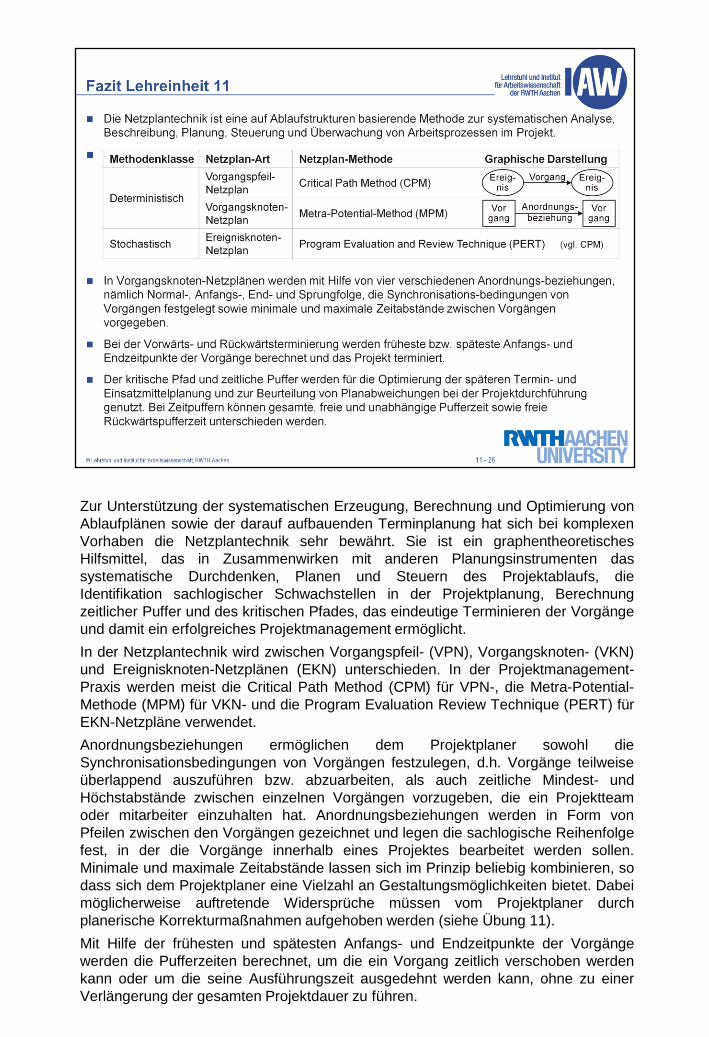
Zur Unterstützung der systematischen Erzeugung, Berechnung und Optimierung von
Ablaufplänen sowie der darauf aufbauenden Terminplanung hat sich bei komplexen
Vorhaben die Netzplantechnik sehr bewährt. Sie ist ein graphentheoretisches
Hilfsmittel, das in Zusammenwirken mit anderen Planungsinstrumenten das
systematische Durchdenken, Planen und Steuern des Projektablaufs, die
Identifikation sachlogischer Schwachstellen in der Projektplanung, Berechnung
zeitlicher Puffer und des kritischen Pfades, das eindeutige Terminieren der Vorgänge
und damit ein erfolgreiches Projektmanagement ermöglicht.
In der Netzplantechnik wird zwischen Vorgangspfeil- (VPN), Vorgangsknoten- (VKN)
und Ereignisknoten-Netzplänen (EKN) unterschieden. In der Projektmanagement-
Praxis werden meist die Critical Path Method (CPM) für VPN-, die Metra-Potential-
Methode (MPM) für VKN- und die Program Evaluation Review Technique (PERT) für
EKN-Netzpläne verwendet.
Anordnungsbeziehungen ermöglichen dem Projektplaner sowohl die
Synchronisationsbedingungen von Vorgängen festzulegen, d.h. Vorgänge teilweise
überlappend auszuführen bzw. abzuarbeiten, als auch zeitliche Mindest- und
Höchstabstände zwischen einzelnen Vorgängen vorzugeben, die ein Projektteam
oder mitarbeiter einzuhalten hat. Anordnungsbeziehungen werden in Form von
Pfeilen zwischen den Vorgängen gezeichnet und legen die sachlogische Reihenfolge
fest, in der die Vorgänge innerhalb eines Projektes bearbeitet werden sollen.
Minimale und maximale Zeitabstände lassen sich im Prinzip beliebig kombinieren, so
dass sich dem Projektplaner eine Vielzahl an Gestaltungsmöglichkeiten bietet. Dabei
möglicherweise auftretende Widersprüche müssen vom Projektplaner durch
planerische Korrekturmaßnahmen aufgehoben werden (siehe Übung 11).
Mit Hilfe der frühesten und spätesten Anfangs- und Endzeitpunkte der Vorgänge
werden die Pufferzeiten berechnet, um die ein Vorgang zeitlich verschoben werden
kann oder um die seine Ausführungszeit ausgedehnt werden kann, ohne zu einer
Verlängerung der gesamten Projektdauer zu führen.
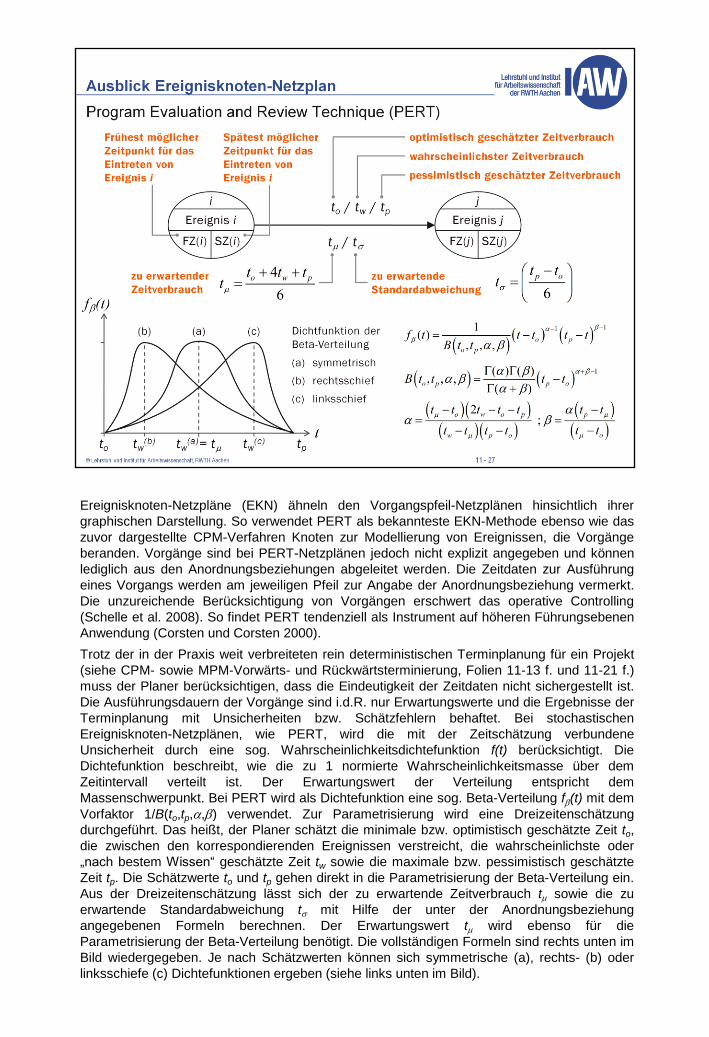
Ereignisknoten-Netzpläne (EKN) ähneln den Vorgangspfeil-Netzplänen hinsichtlich ihrer
graphischen Darstellung. So verwendet PERT als bekannteste EKN-Methode ebenso wie das
zuvor dargestellte CPM-Verfahren Knoten zur Modellierung von Ereignissen, die Vorgänge
beranden. Vorgänge sind bei PERT-Netzplänen jedoch nicht explizit angegeben und können
lediglich aus den Anordnungsbeziehungen abgeleitet werden. Die Zeitdaten zur Ausführung
eines Vorgangs werden am jeweiligen Pfeil zur Angabe der Anordnungsbeziehung vermerkt.
Die unzureichende Berücksichtigung von Vorgängen erschwert das operative Controlling
(Schelle et al. 2008). So findet PERT tendenziell als Instrument auf höheren Führungsebenen
Anwendung (Corsten und Corsten 2000).
Trotz der in der Praxis weit verbreiteten rein deterministischen Terminplanung für ein Projekt
(siehe CPM- sowie MPM-Vorwärts- und Rückwärtsterminierung, Folien 11-13 f. und 11-21 f.)
muss der Planer berücksichtigen, dass die Eindeutigkeit der Zeitdaten nicht sichergestellt ist.
Die Ausführungsdauern der Vorgänge sind i.d.R. nur Erwartungswerte und die Ergebnisse der
Terminplanung mit Unsicherheiten bzw. Schätzfehlern behaftet. Bei stochastischen
Ereignisknoten-Netzplänen, wie PERT, wird die mit der Zeitschätzung verbundene
Unsicherheit durch eine sog. Wahrscheinlichkeitsdichtefunktion f(t) berücksichtigt. Die
Dichtefunktion beschreibt, wie die zu 1 normierte Wahrscheinlichkeitsmasse über dem
Zeitintervall verteilt ist. Der Erwartungswert der Verteilung entspricht dem
Massenschwerpunkt. Bei PERT wird als Dichtefunktion eine sog. Beta-Verteilung f(t) mit dem
Vorfaktor 1/B(to,tp,,) verwendet. Zur Parametrisierung wird eine Dreizeitenschätzung
durchgeführt. Das heißt, der Planer schätzt die minimale bzw. optimistisch geschätzte Zeit to,
die zwischen den korrespondierenden Ereignissen verstreicht, die wahrscheinlichste oder
„nach bestem Wissen“ geschätzte Zeit tw sowie die maximale bzw. pessimistisch geschätzte
Zeit tp. Die Schätzwerte to und tp gehen direkt in die Parametrisierung der Beta-Verteilung ein.
Aus der Dreizeitenschätzung lässt sich der zu erwartende Zeitverbrauch t sowie die zu
erwartende Standardabweichung t mit Hilfe der unter der Anordnungsbeziehung
angegebenen Formeln berechnen. Der Erwartungswert t wird ebenso für die
Parametrisierung der Beta-Verteilung benötigt. Die vollständigen Formeln sind rechts unten im
Bild wiedergegeben. Je nach Schätzwerten können sich symmetrische (a), rechts- (b) oder
linksschiefe (c) Dichtefunktionen ergeben (siehe links unten im Bild).
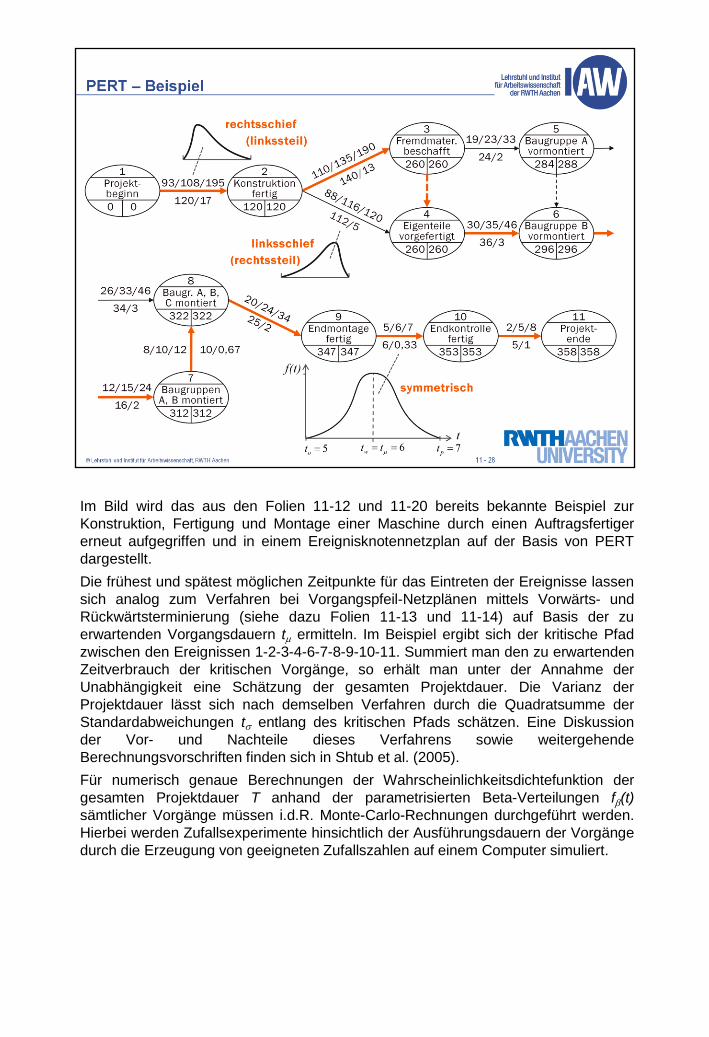
Im Bild wird das aus den Folien 11-12 und 11-20 bereits bekannte Beispiel zur
Konstruktion, Fertigung und Montage einer Maschine durch einen Auftragsfertiger
erneut aufgegriffen und in einem Ereignisknotennetzplan auf der Basis von PERT
dargestellt.
Die frühest und spätest möglichen Zeitpunkte für das Eintreten der Ereignisse lassen
sich analog zum Verfahren bei Vorgangspfeil-Netzplänen mittels Vorwärts- und
Rückwärtsterminierung (siehe dazu Folien 11-13 und 11-14) auf Basis der zu
erwartenden Vorgangsdauern t ermitteln. Im Beispiel ergibt sich der kritische Pfad
zwischen den Ereignissen 1-2-3-4-6-7-8-9-10-11. Summiert man den zu erwartenden
Zeitverbrauch der kritischen Vorgänge, so erhält man unter der Annahme der
Unabhängigkeit eine Schätzung der gesamten Projektdauer. Die Varianz der
Projektdauer lässt sich nach demselben Verfahren durch die Quadratsumme der
Standardabweichungen t entlang des kritischen Pfads schätzen. Eine Diskussion
der Vor- und Nachteile dieses Verfahrens sowie weitergehende
Berechnungsvorschriften finden sich in Shtub et al. (2005).
Für numerisch genaue Berechnungen der Wahrscheinlichkeitsdichtefunktion der
gesamten Projektdauer T anhand der parametrisierten Beta-Verteilungen f(t)
sämtlicher Vorgänge müssen i.d.R. Monte-Carlo-Rechnungen durchgeführt werden.
Hierbei werden Zufallsexperimente hinsichtlich der Ausführungsdauern der Vorgänge
durch die Erzeugung von geeigneten Zufallszahlen auf einem Computer simuliert.

Statt aufwendigen Monte-Carlo-Rechnungen lässt sich bei PERT-Netzplänen eine
einfache analytische Methode zur Schätzung der Projektdauer unter Unsicherheit
verwenden, die auf den Konvergenzaussagen des Zentralen Grenzwertsatzes
basiert. Allerdings können hierbei u.U. recht große Schätzfehler auftreten. Der
Zentrale Grenzwertsatz besagt u.a., dass die Summe von unabhängig verteilten
Zufallsvariablen annähernd einer Gauß´schen Normalverteilung folgt, sofern die
Anzahl der Zufallsvariablen hinreichend groß und die Varianz der Zufallsvariablen
endlich ist.
Es sei angenommen, dass in dem Projekt, das durch den auf der vorherigen Folie
dargestellten Ereignisknotennetzplan modelliert wurde, die genannten Bedingungen
erfüllt sind. Mit Hilfe der analog zum Verfahren bei Vorgangspfeil-Netzplänen
berechneten frühest und spätest möglichen Zeitpunkte für das Eintreten der
Ereignisse kann zunächst der kritische Pfad des Ereignisknotennetzplans rein
deterministisch anhand der Erwartungswerte t ermittelt werden. Das Ergebnis wurde
bereits auf der vorherigen Folie angegeben. Die zu erwartende Gesamtdauer und die
zu erwartende Gesamtstandardabweichung lassen sich anhand der Verteilungen
zwischen zwei aufeinanderfolgenden Ereignissen entlang des kritischen Pfads
berechnen. Diese Berechnungen basieren auf den Grundlagen der
Wahrscheinlichkeitstheorie, die besagen, dass der Erwartungswert der Summe einer
beliebigen Menge von unabhängigen Zufallsvariablen gleich der Summe ihrer
Erwartungswerte und die Varianz der Summe gleich der Summe der einzelnen
Varianzanteile sind.
Mit Bezug auf den Zentralen Grenzwertsatz kann schließlich die Normalverteilung
verwendet werden, um die Wahrscheinlichkeit zu berechnen, dass die zu erwartende
Gesamtdauer T des Projekts kleiner gleich einem gegebenen Wert ist. Die Variable
Z ist hier definiert als die standardnormalverteilte Größe mit einem Erwartungswert
= 0 und einer Varianz 2 = 1. Der jeweilige Wahrscheinlichkeitswert für einen
gegebenen Z-Wert kann in entsprechenden Wahrscheinlichkeitstabellen abgelesen
werden, bspw. in Shtub et al. (2005), S. 455.