-
7/21/2019 MODELO TIPO MASING
1/14
4. MODELO TIPO MASING, APLICACIN Y
ANLISIS DE RESULTADOS
4.1. MARCO DE REFERENCIA
La mayora de los modelos propuestos hasta ahora para reproducir
el comportamiento dinmico de lossuelos resultan de la interpretacin
de los datos obtenidos de pruebas de laboratorio, como la
prueba
de columna resonante, corte directo cclico y cmara triaxial
cclica. Una clasificacin de tipos demodelos conforme al
comportamiento de suelos y mtodos de anlisis de respuesta ha sido
elaboradapor Ishihara (1996), la cual se presenta en la figura
4.1.
Uno de los aspectos ms importantes en el anlisis de respuesta
ssmica de cualquier depsito desuelo basado en la teora de la
propagacin de ondas, es el de representar al suelo mediante
unmodelo que relacione los esfuerzos cortantes con las
deformaciones cortantes. Por esto, el modeladodel comportamiento
del suelo bajo condiciones de carga dinmica debe realizarse de tal
manera que elmodelo incluya las caractersticas de deformacin en el
intervalo de deformacin considerado. Lamodelacin de las propiedades
dinmicas del suelo, debe considerar el comportamiento elstico
parael rango de pequeas deformaciones y posteriormente el
comportamiento elasto-plstico para el rangode grandes
deformaciones.
-
7/21/2019 MODELO TIPO MASING
2/14
-
7/21/2019 MODELO TIPO MASING
3/14
MODELO TIPO MASING, APLICACIN Y ANLISIS DE RESULTADOS
45
a
g
f
l
e k 0h
bg a
i
cj
1 2
d' j' 0
ga'
i' h'
c'b'
d
a
k' l'
f'e'
1
2
a. b.
Figura 4.2.Descomposicin de la curva de histresis no lineal en
lacomponente elstica y disipacin de energa (Ishihara, 1996).
Al construir un modelo no lineal de la relacin cclica
esfuerzo-deformacin, lo comn es especificaruna funcin para la curva
esqueleto y otra para el ciclo de histresis. La curva esqueleto
puede serexpresada como el esfuerzo cortante en funcin de (figura
4.3).
( )f = [4.1]
a + a + a
= f()
aa
= f 2 2
a 2 2 a - a= f
0
B
A
Curvaesqueleto
Figura 4.3.Regla de Masing (Ishihara, 1996).
Normalmente esta relacin se obtiene de pruebas con carga
monotnica en suelos. Ahora suponiendoque la descarga ocurre en el
punto A de la figura anterior (donde a = y a = ), entonces
laecuacin de la curva esfuerzo-deformacin para la subsecuente
descarga est dada por
-
7/21/2019 MODELO TIPO MASING
4/14
-
7/21/2019 MODELO TIPO MASING
5/14
MODELO TIPO MASING, APLICACIN Y ANLISIS DE RESULTADOS
47
De igual manera que en un modelo visco-elstico, la energa de
disipacin por ciclo es representadapor el rea dentro del ciclo de
histresis W . Por analoga, es definida como
14
WW
=
[4.5]
donde W es la mxima energa almacenada.
Para el caso no lineal, existen varias maneras de definir la
energa almacenada, la ms sencilla esasumirla igual al rea del
tringulo definido por OA a (figura 4.4). Por tanto, la energa
almacenada esexpresada como
( )12 a a
W f = [4.6]
De acuerdo a la regla de Masing, el ciclo de histresis
(ecuaciones [4.2] y [4.3]) es obtenidomultiplicando la curva
esqueleto por dos en ambas direcciones, y . Por lo tanto, la seccin
de medialuna ABE (figura 4.4), tiene la misma forma que la porcin
de media luna AOC y el rea ABE es cuatroveces el rea AOC.
Considerando esto, la energa perdida por ciclo Wa una amplitud de
deformacin
a es calculada como
( )0
8 aW f d W
= [4.7]
Sustituyendo las ecuaciones [4.6] y [4.7] en [4.5], la relacin
de amortiguamiento se obtiene como
( )
( )0
2212
a
a a
f d
f
=
[4.8]
El mdulo Gdado por la expresin [4.4] y la relacin por la ecuacin
[4.8] son los parmetros msimportantes que representan las
caractersticas de deformacin no lineal del suelo. Cabe anotar
queambos parmetros estn expresados en funcin de la amplitud de
deformacin angular, a , ya que laderivacin de las frmulas est
basada en la ecuacin de la curva esqueleto, ecuacin [4.1].
4.2. MODELO TIPO MASING
El modelo tipo Masing (Romo, 1990; Romo, 1995) es el modelo
empleado en este trabajo paramodelar las relaciones no lineales del
mdulo G y la relacin respecto a la deformacin .
Este modelo se basa en las siguientes hiptesis:
- El material sometido a carga armnica con amplitud constante
responde de manera estable, si elamortiguamiento histertico es
suficiente para atenuar en pocos ciclos la parte transitoria.
- La no linealidad del material es de naturaleza plstica, es
decir, la rigidez del suelo regresa a suvalor mximo cada vez que la
carga cambia de sentido.
- El amortiguamiento es de tipo histertico.
-
7/21/2019 MODELO TIPO MASING
6/14
-
7/21/2019 MODELO TIPO MASING
7/14
MODELO TIPO MASING, APLICACIN Y ANLISIS DE RESULTADOS
49
ndice de plasticidad, PI(%)
0 100 200 3000
0.6
0.8
ParmetroA
1.0
Intervalo de valores
Intervalo de valores
ParmetroB
00
0.4
0.6
ndice de plasticidad, PI(%)
100 200 300
Figura 4.6.Efecto de PI, en el parmetroA Figura 4.7.Efecto de
PI, en el parmetro B
(Romo, 1995) (Romo, 1995)
Una vez obtenidos los valores de Gmx, Gmn, r , A y B, es posible
obtener los valores de G paracualquier deformacin angular.
Para obtener la relacin no lineal , los valores de se calculan
empleando la siguiente expresin,propuesta por Romo en 1995 (ecuacin
[2.17]).
( ) = +
mx mn mn H
Esta ecuacin fue obtenida considerando las condiciones de
frontera para los valores de ; lascondiciones de frontera
establecidas son:
- Para deformaciones tendientes a cero; H() tiende a cero y el
valor de la relacin tiende a mn.
- Para deformaciones tendientes a infinito; H() tiende a uno y
el valor de la relacin tiende a mx.
4.3. APLICACIN DEL MODELO TIPO MASING A LOS DATOS
EXPERIMENTALES
El presente trabajo presenta la aplicacin del modelo tipo Masing
a los datos experimentales,obtenidos de 18 ensayes llevados a cabo
en columna resonante y cmara triaxial cclica con probetasde
arcillas marinas extradas del complejo petrolero de Ku-Maloob-Zaap
ubicado en la Sonda deCampeche. El modelo tipo Masing fue descrito
a detalle en la seccin anterior.
La aplicacin del modelo permite obtener nuevos resultados de G y
,siendo posible iniciar unproceso de iteracin, hasta que las
propiedades dinmicas son ajustadas, concluyendo el anlisis
hastallegar a una buena compatibilidad entre las propiedades
calculadas y experimentales con respecto a ladeformacin
angular.
-
7/21/2019 MODELO TIPO MASING
8/14
CAPTULO 4
50
Determinacin de Gmx, Gmn, mx, mnLos valores Gmxy mn,fueron
definidos como el valor mximo y mnimo respectivamente, obtenidosen
el rango de comportamiento lineal del material estudiado (<
10-4%), o sea valores obtenidos de
resultados de ensayes en CR; mientras que los valores Gmny
mxcorresponden a los valores mnimo ymximo, respectivamente,
alcanzados por el suelo despus de haber sufrido ms del 80 % de
sudegradacin, o sea valores correspondientes a deformaciones
mayores a 10-2 %, los cuales fueronobtenidos de resultados de
ensayes en CTXC.
Determinacin de los parmetros r , A y B
Los valores obtenidos de los distintos parmetros son
primordiales para la aplicacin del modelo tipoMasing, ya que son
stos quienes dan la forma particular a cada una de las curvas de
comportamientode los parmetros dinmicos. El parmetro r , define el
punto de inflexin de la curva G/Gmx (anexo 4) y por ende el de las
relaciones no lineales G y ;A, es el parmetro encargado
deequilibrar la parte cncava y convexa de las mismas curvas y
Bpermite ampliar o disminuir el rango dedeformaciones angulares
intermedio, correspondiente al comportamiento no lineal de G y
respecto a .
De la relacin G/Gmx , para cada una de las pruebas realizada en
CR y CTXC, se obtuvo el valor delparmetro r , igual al valor de la
deformacin angular correspondiente a una degradacin del 50 %
de G/Gmx (figura 4.8). Los respectivos valores de r para cada
muestra se hallan en la tabla 4.1.
Este parmetro presenta cierta dependencia del valor de 'c , ya
que a mayor valor, mayor es el valor
del parmetro r (figura 4.9).
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1E-06 1E-05 0.0001 0.001 0.01 0.1 1 10
, %
G/Gmx
Experimental
Modelo
r
0.5
Figura 4.8.Obtencin del parmetro r.Una vez obtenidos los valores
de referencia Gmx, Gmn y r , se aplic el modelo tipo Masing y
sehallaron los valores correspondientes de los parmetros Ay Bpara
cada prueba, con estos valores secalcul nuevamente el valor de la
funcin H() correspondiente a cada muestra, empleando elrespectivo
valor de r . Una vez obtenidos los valores de todos los parmetros
necesarios por elmodelo para su aplicacin, se procedi a calcular
las propiedades dinmicas con las ecuacionessealadas por el modelo
(seccin 4.2).
-
7/21/2019 MODELO TIPO MASING
9/14
MODELO TIPO MASING, APLICACIN Y ANLISIS DE RESULTADOS
51
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.00001 0.0001 0.001 0.01 0.1 1 10
, %
G/Gmx
Muestra 9.2
Muestra 6.2
Muestra 8.2
0.5
r
Figura 4.9.Efecto de 'c sobre el parmetro r .
La variacin de los parmetros r ,A y Bcon respecto a PI(en el
intervalo de valores correspondientea las muestras ensayadas) se
presenta en la figura 4.10, en esta figura se percibe la tendencia
casilineal de los parmetros A y B respecto a PI, mientras que r ,
presenta una leve tendencia aaumentar conforme aumenta PI, lo cual
indica que entre mayor sea PI, el punto de inflexin de lascurvas G
y , corresponder a un mayor, esto permite resaltar la importancia
tanto de PIcomo del parmetro r en el estudio de las curvas G y - .
Conviene notar, que el rango devalores de PIvara poco (15 % <
PI< 60 %). Para intervalos ms amplios la dependencia de los
tresparmetros es mucho mayor (i.e., figuras 4.5 a 4.7).
r= 0.0009(PI) - 0.0085
R2= 0.6001
0.0
0.1
0.2
0.3
0.4
0.5
0 20 40 60 80 100
PI, %
Parmetro
r
,%
a.
A= 0.0003(PI) + 0.9088
R
2
= 0.0029
0.0
0.5
1.0
1.5
2.0
0 20 40 60 80 100
PI, %
ParmetroA
B= 0.0005(PI) + 0.2985
R2= 0.0319
0.0
0.2
0.4
0.6
0.8
1.0
0 20 40 60 80 100
PI, %
ParmetroB
b. c.
Figura 4.10.Variacin de los parmetros r ,Ay Brespecto al PI.
'
c
-
7/21/2019 MODELO TIPO MASING
10/14
CAPTULO 4
52
La dispersin presentada por los puntos experimentales de la
figura 4.10 (R2bajo) es muy alta, por lotanto es conveniente
proponer franjas de comportamiento para cada parmetro y no
tendenciaslineales; esto ser visto ms adelante.
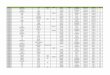
Tabla 4.1.Datos dinmicos y parmetros r ,A yB.
Datos generales Datos dinmicos Parmetros delmodelo
NSondeo
NMuestra
Prof.(m) Equipo
'
c1
(MPa)
Gmx (MPa)
Gmn (MPa)
mx (%)
mn (%)
r A B
CR 0.038 72.670 1.1511.1 10.0
TC 0.038 1.107 15.6600.005 0.970 0.300
CR 0.120 68.160 1.4291
1.2 19.0TC 0.120 3.361 14.441
0.019 0.950 0.300
CR 0.122 66.930 1.0132.1 18.5
TC 0.122 1.113 28.4560.029 0.850 0.300
CR 0.214 65.730 0.6662
2.2 33.0TC 0.214 7.656 14.270
0.060 0.900 0.320
CR 0.047 14.990 2.0893.1 9.5
TC 0.047 1.060 15.8470.050 0.810 0.300
CR 0.212 83.010 1.0343
3.2 34.0TC 0.212 5.921 13.223
0.040 0.900 0.420
CR 0.045 20.120 2.0104.1 10.0
TC 0.045 0.369 22.3640.017 0.980 0.270
CR 0.182 80.170 0.8034
4.2 28.5TC 0.182 2.557 41.621
0.050 1.000 0.340
CR 0.082 34.830 1.6455.1 10.0
TC 0.0821.823
16.779
0.050 0.850 0.300
CR 0.156 110.300 0.53155.2 18.0
TC 0.156 3.629 14.2620.010 0.950 0.290
CR 0.098 132.300 0.7986.1 11.5TC 0.098 1.555 14.784
0.005 0.950 0.350
CR 0.164 91.450 1.1916
6.2 21.5TC 0.164 2.593 15.640
0.026 0.900 0.350
CR 0.084 118.700 1.1737.1 9.5
TC 0.084 0.847 19.2590.010 0.800 0.300
CR 0.171 71.980 1.0487
7.2 20.5TC 0.171 2.518 16.883
0.043 0.950 0.340
CR 0.140 90.730 1.0508.1 18.0
TC 0.140 3.613 13.8320.020 0.890 0.320
CR 0.232 97.820 1.3048 8.2 31.0TC 0.232 2.275 17.980
0.035 1.050 0.440
CR 0.056 25.760 1.9399.1 10.0
TC 0.056 0.577 24.0010.035 0.890 0.270
CR 0.160 80.530 1.2269
9.2 22.5TC 0.160 1.345 17.004
0.020 0.950 0.320
Los resultados presentados en la figura 4.10 coinciden con los
obtenidos en estudios anterioresrealizados en arcillas marinas de
la zona de Cantarell ubicada en la Sonda de Campeche (Cano,
2003).
-
7/21/2019 MODELO TIPO MASING
11/14
MODELO TIPO MASING, APLICACIN Y ANLISIS DE RESULTADOS
53
La tabla 4.1 presenta los valores obtenidos de Gmx, Gmn, mx, mny
los parmetros r ,Ay Bparacada una de las muestras obtenidas a
diferentes profundidades en el complejo petrolero
Ku-Maloob-Zaap.
La variacin presentada por la deformacin angular de referencia r
respecto a los diferentes'c1 se
presenta en la figura 4.11, donde se observa que existe una
tendencia casi lineal entre dicha
deformacin y 'c , lo cual coincide con los estudios obtenidos
por Cano (2003). Adems, esta
tendencia casi lineal horizontal comprueba una vez ms que la
influencia de 'c sobre las relaciones
G y , representa una desplazamiento hacia arriba y no hacia la
derecha como s lo hace PI.
0.0
0.1
0.2
0.3
0.4
0.5
0.00 0.05 0.10 0.15 0.20 0.25 0.30
' c , MPa
Parmetro
r,%
Figura 4.11. Efecto de 'c sobre la deformacin de referencia r
.
4.4. RESULTADOS DEL MODELADO
Con el fin de modelar el comportamiento de las propiedades
dinmicas de las arcillas marinas de lazona de Ku-Maloob-Zaap,
fueron adoptados los resultados de 18 pruebas realizadas tanto en
CR comoen CTXC; los resultados de dichas pruebas fueron necesarios
para alimentar el modelo tipo Masing.Las figuras 4.12 a 4.15
presentan los resultados del modelado de cuatro muestras; la
totalidad de lascurvas obtenidas se presentan en elanexo 5.
0
20
40
60
80
100
1E-06 1E-05 1E-04 0.001 0.01 0.1 1 10 100
, %
G,
MPa
Experimental
Modelo
0
2
4
6
8
10
12
14
16
18
1E-06 1E-05 0.0001 0.001 0.01 0.1 1 10 100
, %
,
%
Experimental
Modelo
Figura 4.12.Aplicacin del modelo tipo Masing en la muestra
1.2
-
7/21/2019 MODELO TIPO MASING
12/14
CAPTULO 4
54
0
20
40
60
80
100
120
1E-06 1E-05 0.0001 0.001 0.01 0.1 1 10 100
, %
G,
MPa
Experimental
Modelo
0
2
4
6
8
10
12
14
16
18
1E-06 1E-05 0.0001 0.001 0.01 0.1 1 10 100
, %
,
%
Experimental
Modelo
Figura 4.13.Aplicacin del modelo tipo Masing en la muestra
5.2
0
20
40
60
80
100
120
1E-06 1E-05 0.0001 0.001 0.01 0.1 1 10 100
, %
G,
MPa
Experimental
Modelo
0
5
10
15
20
25
30
1E-06 1E-05 0.0001 0.001 0.01 0.1 1 10 100
, %
,
%
Experimental
Modelo
Figura 4.14.Aplicacin del modelo tipo Masing en la muestra
8.2
0
20
40
60
80
100
1E-06 1E-05 0.0001 0.001 0.01 0.1 1 10 100
, %
G,
MPa
Experimental
Modelo
0
2
4
6
8
10
12
14
16
18
1E-06 1E-05 0.0001 0.001 0.01 0.1 1 10 100
, %
,
%
Experimental
Modelo
Figura 4.15.Aplicacin del modelo tipo Masing en la muestra
9.2
De los resultados obtenidos con la modelacin aplicada a las
arcillas en estudio, se puede concluir queexiste una buena
reproduccin de los datos experimentales en cuanto a las curvas de
comportamientoG , mientras que para las curvas , no son muy
satisfactorias.
Factores como, diferencias en el origen, tipo y conformacin de
las arcillas lacustres y marinas, lascondiciones de frontera
asumidas por el modelo tipo Masing y los parmetros de forma
empleado pordicho modelo, estn relacionados con el comportamiento
poco aproximado de las curvas tericas a los resultados
experimentales obtenidos en cada prueba.
-
7/21/2019 MODELO TIPO MASING
13/14
MODELO TIPO MASING, APLICACIN Y ANLISIS DE RESULTADOS
55
Existen diferencias en el origen, tipo y conformacin de las
arcillas lacustres (arcillas de la ciudad deMxico) empleadas en la
obtencin del modelo tipo Masing y las arcillas marinas empleadas en
este
estudio; inicialmente fueron manejados resultados de ensayes
dinmicos en arcillas de la ciudad deMxico (Romo, 1990; Romo, 1995),
correspondientes a suelos de origen lacustre, mientras que eneste
estudio la aplicabilidad del modelo tipo Masing se realiza en
arcillas de la Sonda de Campeche,correspondientes a suelos de
origen marino. Esta diferencia de origen y condiciones in situ de
lossuelos en cuestin, influye de cierta manera en la modelacin
obtenida de las arcillas marinas, la cualse hace notoria en el caso
de la relacin para cada una de las pruebas realizadas.
Condiciones de frontera tales como que Gtiende a su valor
mnimo,Gmn, y que tiende a su valormximo, mx, para el caso de
deformaciones angulares tendientes a infinito y que G se aproxime a
suvalor mximo, Gmx, y a su valor mnimo, mn, para deformaciones
prximas a cero, son lasempleadas por el modelo tipo Masing para
obtener curvas adecuadas de las relaciones G y .Los valores
obtenidos de G y tendientes a Gmx y mn respectivamente,
corresponden a muycercanas a cero, lo que representa una buena
proximidad entre los datos experimentales y los del
modelo en el rango de pequeas deformaciones; por otro lado los
valores de Gy cercanos a Gmnymx, aunque corresponden a valores de
grandes deformaciones, estn lejanos de infinito, lo cualrepresenta
cierta dispersin de las curvas obtenidas en arcillas marinas de
Ku-Maloob-Zaap parael rango de grandes deformaciones (anexo 5), mas
no en las curvas G , ya que el valor de G parael rango de grandes
deformaciones tienden a permanecer en su valor mnimo, Gmn. Debido a
esto sepropone una modificacin del modelo tipo Masing en el
procedimiento de obtencin de las curvas .
Los parmetros empleados por el modelo para dar forma a las
relaciones G y , adoptan valorestpicos para cada tipo de suelo y
particularmente para cada muestra ensayada. Con la finalidad
dedisminuir la discrepancia entre las curvas G y y de hacer
aplicable el modelo tipo Masing alas arcillas marinas, se
desarrolla un proceso de ajuste de dicho modelo a los datos
experimentales y
se propone una modificacin del modelo, la cual se presenta ms
adelante.Las curvas G muestran claramente la degradacin que sufre G
conforme se aumenta . Estosresultados coinciden con las
investigaciones realizadas en arcillas marinas por investigadores
comoKoutsoftas y Fischer (1980); Saada y Macky (1985); Romo y
Ovando (1995).
En las curvas , se puede percibir la tendencia a aumentar de la
relacin . La correspondenciaentre los resultados experimentales y
del modelo para es regular, especialmente para el rango degrandes
deformaciones; esto representa la necesidad de modificar el modelo
para que se ajuste mejora los resultados experimentales de las
arcillas marinas de la zona de Ku-Maloob-Zaap.
Una vez obtenidas con el modelo, las curvas correspondientes al
mdulo G respecto a la deformacin para las arcillas marinas en
estudio, se obtuvo la relacin entre el mdulo de rigidez normalizado
y la
deformacin angular. La figura 4.16 presenta el resultado
obtenido de esta normalizacin.
Es importante anotar que diferentes autores (Sun y Seed, 1988;
Romo, 1990; Vucetic y Dobry, 1991)han sealado que las curvas G/Gmx
dependen principalmente del ndice de plasticidad, PI, delsuelo; al
aumentar ste, las curvas se desplazan hacia la derecha, indicando
que el intervalo decomportamiento cuasielstico lineal es ms amplio.
Estos resultados concuerdan con los obtenidos eneste trabajo despus
de aplicar el modelo tipo Masing, lo cual se muestra en la figura
4.16. Esta figurapresenta claramente un rango amplio de
desplazamiento de las curvas hacia la derecha, lo cual sedebe al
amplio intervalo en los valores de PIde las arcillas
estudiadas.
-
7/21/2019 MODELO TIPO MASING
14/14
CAPTULO 4
56
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1E-06 1E-05 0.0001 0.001 0.01 0.1 1 10 100
,%
G/Gmx
0.038 MP a < 'c < 0.375 MP a 15 %