Embed Size (px)
Citation preview

Physics Laboratory Manual
BS-MS Dual Degree
Department of PhysicsIndian Institute of Science Eduaction
and Research Bhopal
compiled by: Dr. R. S. Singh

Content
1. Measurement of length 1
2. Moments 4
3. Free fall 7
4. Torsional vibrations and torsion modulus 10
5. Mechanical hysteresis 14
6. Bar Pendulum 17
7. Gyroscope 20
8. Youngs Modulus 23
9. Forced Oscillations - Pohls pendulum 31
10. Capacitance of metal spheres and of a spherical capacitor 37

Experiment No. 1:Measurement of length
This experiment is to accurately measure the length, diameter, curvature etc.
Aim
• Determination of the length, diameter and volume of tube with the vernier calipers.
• Determination of the thickness of wires and plates with the Screw gauge.
Procedure
Vernier Caliper
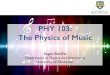
The caliper gauge (sliding gauge) is the best known measuring tool for rapid and relativelyaccurate measurement. Inside, outside and depth measurements can be made. The accuracywhich can be achieved is proportional to the graduation of the vernier scale. The measuringfaces which are relevant to the taking of reading may be seen in Fig. 1. When the jawsare closed, the vernier zero mark coincides with the zero mark on the scale of the rule. Thename vernier is given to an addition to a gauge which enables the accuracy of measurement(reading accuracy) of the gauge to be increased by 10 to 50 times. The linear vernier isa small rule which slides along a scale. This rule is provided with a small scale which isdivided into m equal divisions. The overall length of these m divisions is equal to m1 onthe main scale. Fig. 1, enlarged, show 39 divisions extending from 28 mm to 67 mm onthe graduated scale, whereas the vernier has 20 divisions (every second mark on the vernierhas been omitted). The workpiece to be measured is placed between the measuring facesand the movable jaw blade is then pushed with moderate pressure up against the workpiece.When taking the reading the zero mark of the vernier is regarded as the decimal point whichseparates the whole numbers from the tenths. The full millimeters are read to the left of thezero mark on the main graduated scale and then, to the right of the zero mark, the vernierdivision mark which coincides with a division mark on the main scale is looked for. Thevernier division mark indicates the tenths of a millimeter (Fig. 2).
Fig. 1. Vernier caliper.
1

Least Count (LC) of the given Vernier Calipers = ..... mm
Table 1: Measurement of lengthSr. No. Main Scale Reading Vernier Scale Reading Final Reading
(MSR) [in mm] (VSR) (=MSR+LC x VSR) [in mm]
1.2.3.4.
Screw gauge
With the screw gauge (Fig. 3) (micrometer screw gauge) the accuracy of measurementcan be increased by one order of magnitude. The workpiece to be measured is placed betweenthe measuring faces, and then the measuring spindle is brought up to the workpiece withthe rapid drive (ratchet, thumb screw). When the rapid drive rotates idly, the pressurerequired for measurement has been reached and the value can be read off. The wholeand half millimeters are read off on the scale barrel, the hundredths of millimeters on themicrometer collar. If the micrometer collar uncovers a half-millimeter, this must be addedto the hundredths.
Fig. 2. Screw Gauge.
Least Count (LC) of the given Screw Gauge = .... mm
Table 2: Measurement of lenghtSr. No. Main Scale Reading Circular Scale Reading Final Reading
(MSR) [in mm] (CSR) (=MSR+LC x CSR) [in mm]
1.2.3.4.
Measurement of diameter
2

Calculation
Error Calculation
Results
The measured length/diameter/....of given....is found to be (....± ....) mm
Precautions
These are the following precautions to be taken during the experiments.1.2.3.
3

Experiment No. 2:Moments
This experiment is to understand the stable equilibrium of a mechanical system bybalancing the Moment (torque) on either side of the fixed axis around which the system is
free to rotate on application of force.
Aim
• Moment as a function of the distance between the origin of the coordinates and thepoint of action of the force.
• Moment as a function of the angle between the force and the position vector to thepoint of action of the force.
• Moment as a function of the force.
Theory
The equilibrium conditions for a rigid body, on which forces−→fi act at points −→ri , are:
−→F =
∑−→fi = 0
−→τ =∑−→ri ×
−→fi = 0
where,−→F and −→τ are total force and moment.
For compensating moments (see fig.3 )
−→r1 ×−→f2 = −→r2 ×
−→f2
and for the magnitude
τ = r1.f1 = r2.f2.Sinα
Fig. 3. Compensating moments.
4

Procedure
The experimental set-up is arranged as shown in Fig. 3. The spring balance is adjustedto zero in the position in which the measurement is to be made in each case. The straightline from the push-in button to the pivot point is adjusted to the horizontal by moving theswivel clamp on the stand rod. The fishing line to weight pan then runs along a row ofholes. The spring balance should be mounted in the swivel clamp so that it forms an angleQ with the fishing line. For tasks 1 and 3, the spring balance is attached on one side of thepivot point of the moments disc and the weight pan on the other side. The force neededto adjust the line through the push-buttons and the pivot to the horizontal is read on thespring balance. (Spring balance vertical.) For task 2, the weight pan should be replacedby the second spring balance. A fixed force, e.g. 1 N, is set on it while the angle betweenthe line from push-button to pivot and the spring balance is varied. On the other, vertical,spring balance, the force needed to bring the push-button-pivot line horizontal is read. Moreconveniently, the angle and the fixed force are first adjusted on the clamped spring balancewhile the disc is released and the moment is compensated on the other spring balance.
Fig. 4. Experimental set-up for investigating moments in equilibrium.
For Task 1. Moment as a function of the distance between the origin of the coordinatesand the point of action of the force (for example, see fig. 4 (a).)
For Task 2. Plot the graph, Moment as a function of the angle between force andposition vector to the point of action of the force (see fig. 4 (b)).
For Task 3. Plot the graph, Moment as a function of the force (see fig. 4 (c)).
5

Observation
Sr. No. r1 (m) m (kg) f1 = m.g (N) τ1 (N-m) r2 (m) α (rad) f2 (N) τ2 (N-m)1.2.3.
Fig. 5. (a) Moment as a function of the distance between the origin of the coordinates and thepoint of action of the force. (b) Moment as a function of the angle between force and position
vector to the point of action of the force. (c) Moment as a function of the force.
Calculation
Error Calculation
Results
Precautions
These are the following precautions to be taken during the experiments.1.2.3.
6

Experiment No. 3:Free fall
This experiment is to determine the accelaration due to gravity using free fall method.
Aim
• Determine the functional relationship between height of fall and falling time
[h = h(t) = (1/2)gt2].
• Find the acceleration due to gravity.
Theory
If a body of mass m is accelerated from the state of rest in a constant gravitational field(gravitational force m, it performs a linear motion. By applying the coordinate system ina way that the x axis indicates the direction of motion and solving the corresponding one-dimensional equation of motion, we get:
md2h(t)
dt2= m.g
for the initial conditions [h(0) = 0], we obtain
dh(0)
dt= 0
The coordiante h as a function of time (see Fig. 6.)
h(t) =1
2gt2
The height is directly proportional to the square of time. This can be displayed by arepresentation of h(t2) as shown in Figs. 7(a) and 7(c). From the regression line of the data,we can calculate the gravitational acceleration because the slope is equal to (1/2)g accordingto equation of motion. Fig. 7(b). shows the values of the gravitational acceleration fordifferent measurements (heights of fall).
Procedure
The set up is shown in Fig. 6. An electrically conducting sphere is gripped in therelease mechanism which closes the start circuit. The pan is adjusted, using the adjustingscrew under the arrest switch, in such a way that a downward motion of a few tenths of amillimeter closes the stop circuit. The pan is raised by hand after each single measurement(initial position). For the effective determination of the height of fall using the marking onthe release mechanism, the radius of the sphere must be taken into account (diameter 3/4inch, approx. 19 mm). The aerodynamic drag of the sphere can be disregarded.
7

Fig. 6. Experimental set-up for free fall experiment with counter.
Fig. 7. (a) Height of fall as a function of falling time. (b) Measured values of the gravitationalacceleration. (c) Height of fall as a function of the square of falling time.
8

Observation
Sr. No. h (m) t (sec) tavg (sec) t2 (sec2) g (m/sec2)1.
1. 2.3.1.
2. 2.3.1.
3. 2.3.1.
4. 2.3.
Calculation
Error Calculation
Results
Precautions
These are the following precautions to be taken during the experiments.1.2.3.
9

Experiment No. 4:Torsional vibrations and torsion modulus
This experiment is to determine the torsional modulus of various materials.
Aim
• Static determination of the torsion modulus of a bar.
• Determination of the moment of inertia of the rod and weights fixed to the bar, fromthe vibration period.
• Determination of the dependence of the vibration period on the length and thicknessof the bars.
• Determination of the shear modulus of steel, copper, aluminium and brass.
Fig. 8. Experimantal set-up.
Theory
If a body is regarded as a continuum, and if −→r0 and −→r denote the position vector of apoint p in the undeformed and deformed states of the body, then for small displacementvectors
−→u = −→r −−→r0 ≡ (u1, u2, u3)
10

and the deformation tensor d is:
dik =∂ui∂xk
+∂uk∂xi
The forces d−→F , which act on a volume element of the body, the edges of the element
being cut parallel to the coordinate planes, are described by the stress tensor τ . To eacharea element dA, characterised by the unit vector −→e in the direction of the normal, there isassigned the stress −→p :
−→p =d−→F
dA−→p = −→e .τ
Hookes law provides the relationship between d and τ :
τik =∑l,m
clmik dlm.
The tensor c is symmetrical for an elastic body, so that only 21 of the 81 components remain.For isotropic elastic bodies, this number is further reduced to 2 values, namely the modulusof elasticity E and the shear modulus G or the Poissons ratio µ:
τ11 =E
1 + µ
{d11 +
µ
1 + 2µ(d11 + d22 + d33)
}
τ12 = Gd12 =1
2
E
1 + µd12 (1)
and analogously for τ22, τ33, τ13, τ23. Using the notations of Figs. 2 and 3, equation (1)can be written:
Fig. 9. (a) Force and resultant deformation Fx = G · S · ω . (b) Torsion in a bar.
11

dFx = g · ω · dS = G · rφL· rdr · dα
From this, the total torque a ring is obtained
dTz =
∫ 2π
0
dFx · r =2πGr3φdr
L
and from this the total torque
Tz =
∫ R
0
dTz =π
2· G · φ · R
4
L
From the definition of the angular restoring torque or torsion modulus DT
Tz = DT · φ (2)
one obtains
DT =π
2· R
4
L· G
From Newtons basic equation for rotary motion
−→T =
d
dt
−→L
were the angular momentum−→L is related to the angular velocity −→ω and the inertia tensor
I in accordance with−→L = I · −→ω
and from (2), one obtains
d2φ
dt2+DT
Izφ = 0
The period of this vibration is
T = 2π
√IzDT
or
T =2π
R2
√Iz ·
2
π· LG
In Task 1, DT is determined in accordance with (2).
Fig. 10. (a) Torque and deflection of a torsion bar. (b) Vibration period of a torsion bar as afunction of its length. (c) Vibration period of a torsion bar as a function of its diameter.
12

From the regression line to the measured values of Fig. 10(a) with the linear statement
Y = A+BX, the slope B = ...... Nm/rad is obtained.
From (3), the moment of inertia of the vibrating bars and masses is determined for thesame torsion bar: IZ = ........ kg m2.
Figures 10 (b) and 10 (c) show the relationship between the vibration period and thelength and diameter of the aluminium bars.
From the regression line to the measured values of Fig. 10(b) with the exponential state-ment, Y = A ·XB the exponent B = ........ is obtained.
From the regression line to the measured values of Fig. 10 (c), with the exponentialstatement, Y = A ·XB the exponent B = ........ is obtained.
Finally, the shear modulus G is determined from (4) for Cu, Al, steel and brass.
GCu = 38× 109N/m2rad
GAl = 24× 109N/m2rad
GSteel = 76× 109N/m2rad
GBrass = 32× 109N/m2rad
Observation
Sr. No. Angle (rad.) Distance (m) Force (N) Torque (N-m)1.2.3.
Calculation
Error Calculation
Results
Precautions
These are the following precautions to be taken during the experiments.1.2.3.
13

Experiment No. 5:Mechanical hysteresis
This experiment is to understand the mechanical hysteresis in various materials.
Aim
• Record the hysteresis curve of steel and copper rods.
• Record the stress-relaxation curve with various relaxation times of different materials.
Fig. 11. Experimental set-up for measuring the hysteresis of metal bars in torsion.
Theory
If forces act on a solid body, it is deformed, e.g. with shear stresses, shear deformationswill occur. The Hookes law range is characterised by the linear relationship between stressand torsion.
With solid bodies, there is generally a range adjacent to the Hookes law range, in whichthere is no longer a linear relationship between stress and deformation, but in which thedeformation is still reversible to some extent. The limit of this range is called the yieldpoint.
The deformation becomes plastic if the stresses become greater than the yield point. Thedeformation of the bar is then not completely reversed, even in the stress-free condition.
14

Since the phenomena of plasticity result from displacements of atoms, temperature andtime have an influence. According to Hookes law, the relationship between the stress τ andthe deformation γ is given by
τ = σ · γ
where σ is the shear modulus. In the plastic range, a simple relaxation theorem approxi-mately applies.
dτ
dt= σ
dγ
dt− τ
λ
λ being the relaxation time. Thus, if the deformation is kept constant, the stress τ aftertime t is
τ = τ0et/λ
if τ0 was the initial stress.
If metals are loaded into the plastic range and the material is allowed to relax, it subse-quently finds itself again in the Hookes law range with a new equilibrium position.
Fig. 13. (a) Mechanical hysteresis curve for the torsion of a steel bar of 2 mm diameter and 0.5m long. The branch which starts from the origin is called the virgin curve (initial curve). (b)
Mechanical hysteresis curve for the torsion of a copper rod of 2 mm diameter and 0.5 m long. (c)Mechanical hysteresis curve for the torsion of an aluminium rod of 2 mm diameter and 0.5 mlong. (d) Relaxation in the torsion of a copper rod of 2 mm diameter and 0.5 m long. The
reading times between curves 1 and 2 lie about 90 seconds apart, those between 2 and 3 about 90minutes. After this recovery process, the bars were unloaded and the curves 4 to 8 were obtained.
Observation
15

Sr. No. Angle (rad.) Distance (m) Force (N) Torque (N-m)1.2.3.
Calculation
Error Calculation
Results
Precautions
These are the following precautions to be taken during the experiments.1.2.3.
16

Experiment No. 6:Bar Pendulum
This experiment is to determine acceleration due to gravity using bar pendulum.
Aim
• Determine acceleration due to gravity using bar pendulum.
Theory
The purpose of this experiment is to use the angular oscillations of a rigid body in theform of a long bar for determining the acceleration due to gravity. The particular form ofthe body is chosen for the sake of simplicity in performing the experiment. The bar is hungfrom a knife-edge through one of the many holes along the length, as shown in Fig. ... Itis free to oscillate about the knife-edge as the axis. Any displacement θ, from the verticalposition of the equillibriumwould give rise to an oscillatory motion just as in the case of asimple pendulum. The difference is that since it is a rotating rigid body we have to considerthe torque of the gravitational force which give rise to the angular acceleration. Hence theperiod of oscllation is given by
T = 2π
√I
Mgd(1)
where I is the moment of inertia of the bar about the axis of rotation through O, M is itsmass and d the distance between O and the centre of mass of the bar C (Fig. ...).
Fig. 14. Experimental set-up of bar pendulum
17

The parallel axis theorem gives
I = I0 +Md2 (2)
I0 being the moment of inertia of the bar about the parallel axis through its centre of mass;so that equation (1) becomes
T = 2π
√I0 +Md2
Mgd(3)
Note that T becomes very large as d → 0 as well as d → ∞. You can check that T as afunction of d undergoes through a minimum. The plot of T as a function of d has a shapeshown in Fig. ....
Fig. 15. Plot between time period, T , and distance, d.
From equation (3),
(4π2M)d2 −MgT 2d+ 4π2I0 = 0
For a given T,it is a quadratic equation in d. So there are two values d1 and d2, the sum ofwhich is
d1 + d2 =MgT 2
4π2M=gT 2
4π2
or,
g =4π2(d1 + d2)
T 2(4)
Procedure
1. Find the centre of mass of the bar by balancing it on a knife-edge and put a markthere. This is necessary to be able to measure the distance of the various points ofsuspension from the centre of mass, i.e., ds.
18

2. The bar has a number of holes in it. A Knife-edge can be passed through a hole andsecured to the bar by means of two nuts at the end of the edge. The bar is thensuspended,with edge resting on the glass plates of a bracket fixed to the wall. Checkthat it is the edge, not rough top, of the knife-edge that is resting and that the bar isfre of the bracket.
3. Decide on how many oscillations to time by using error estimates in all the measure-ments. Set the bar oscillating with a small amplitude and time the oscillations Decideon where do you start the count. Take three readings for each hole, i.e., the same valueof d. Start at one end of the bar and systematically take readings for determining Tfor each available value of d till you reach closest to the centre of mass.
Plot a graph of T against d as in Fig.(2).
Draw a smooth curve through the points. Draw a line parallel to the d-axis cutting thecurve at points A and B. Then QA = d1 and QB = d2. Also T = CQ. Get g from equation(4). Do it for at least two values of T .
Observation
Sr. No. d (cm) No. of Oscillation time of Oscillation Mean Time Time period(cm) (sec) (sec) (sec)
1.1. 2.
3.1.
2. 2.3.3.1.
3. 2.3.
Calculation
Error Calculation
Results
Precautions
These are the following precautions to be taken during the experiments.1.2.3.
19

Experiment No. 7:Gyroscope
This experimant is to determine the moment of inertia of the gyroscope.
Aim
• Determination of the momentum of inertia of the gyroscope by measurement of thegyro-frequency and precession frequency.
Theory Let the symmetrical gyroscope G in fig. 4, which is suspended so as tobe able to rotate around the 3 main axes, be in equilibrium in horizontal position withcounterweight C. If the gyroscope is set to rotate around the x-axis, with an angular velocityω, the following is valid for the angular momentum L, which is constant in space and intime:
L = IP · ωR (1)
Fig. 16. 3 axis gyroscope.
Adding a supplementary mass m∗ at the distance r∗ from the support point induces asupplementary torque M∗, which is equal to the variation in time of the angular momentumand parallel to it.
M∗ = m∗gr∗ =dL
dt(2)
Due to the influence of the supplementary torque (which acts perpendicularly in this par-ticular case), after a lapse of time dt, the angular momentum L will rotate by an angle dφfrom its initial position (fig. ...).
dL = L dφ (3)
20

Fig. 17. Schematic representation of the gyroscope submitted to forces.
The gyroscope does not topple under the influence of the supplementary torque, but reactsperpendicularly to the force generated by this torque. The gyroscope, which now is submittedto gravitation, describes a so-called precession movement. The angular velocity φP of theprecession fulfils the relation:
ωP =dφ
dt=
1
L
dL
dt=
1
IPωR
dL
dt=m∗gr∗
IPωR(4)
Taking ωP = 2π/tP and ωR = 2π/tR one obtains:
1
tR=m∗gr∗
4π2
1
IPtP (5)
According to (10), fig. .. shows the linear relation between the inverse of the duration of arevolution tR of the gyroscope disk and the duration of a precession revolution tP for twodifferent masses m∗. The slopes of the straight lines allow to calculate the values of themomentum of inertia.The double value of the torque (double value of m∗) causes the doubling of the precessionfrequency.If m∗ is hung into the forward groove of the gyroscope axis, or if the direction of rotation ofthe disk is inverted, the direction of rotation of the precession is also inverted.If the supplementary disk identical to the gyroscope disk is used too, and both are causedto rotate in opposite directions, no precession will occur when a torque is applied.
Fig. 18. (a) Precession of the horizontal axis of the gyroscope. (b) Determination of themomentum of inertia from the slope of straight line t−1
R = f(tP ).
21

Procedure
The gyroscope, on which no forces act, and which can move freely around its 3 axes, iswound up and the duration tR of one revolution (rotation frequency) is determined by meansof the forked light barrier, with the axis of the gyroscope lying horizontally. Immediately afterthis, a mass m∗ is hung at a distance r∗ (27 cm given) into the groove at the longer end of thegyroscope axis. The duration of half a precession rotation tP/2 must now be determined witha manual stopwatch (this value must be multiplied by two for the evaluation). The mass isthen removed, so the gyroscope axis can regain immobility, and tR can be determined again.The inverse of the average value from both measurements of tR is entered into a diagramabove precession time tP . In the same way, the other measurement points are recorded fordecreasing number of gyroscope rotations. The slope of the resulting straight line allows tocalculate the momentum of inertia of the gyroscope disk.
Observation
Sr. No. m r Number of Time for tR 1/tR Half precession tP(gm) (cm) revolution revolution (sec) (sec−1) time tP/2 (sec) (sec)
1.2.
1. 3.4.5.1.2.
2. 3.4.5.1.2.
3. 3.
4.5.
Calculation
Error Calculation
Results
Precautions
These are the following precautions to be taken during the experiments.1.2.3.
22

Experiment No. 8:Youngs Modulus
This experimant is to determine the Youngs Modulus of various materials.
Aim
• Determination of Young’s Modulus of the given Iron, Brass, and aluminium bars bybending method.
Fig. 19. Experimental set-up for determining youngs modulus
Theory
Modulus of Elasticity: A measure of the rigidity of metal. Ratio of stress, withinproportional limit, to corresponding strain. Force which would be required to stretch asubstance to double its normal length, on the assumption that it would remain perfectlyelastic, i.e., obeys Hooke’s Law throughout the twist. The ratio of stress to strain withinthe perfectly elastic range. Specifically, the modulus obtained in tension or compressionis Young’s modulus, stretch modulus or modulus of extensibility; the modulus obtained intorsion or shear is modulus of rigidity, shear modulus or modulus of torsion; the moduluscovering the ratio of the mean normal stress to the change in volume per unit volume isthe bulk modulus. The tangent modulus and secant modulus are not restricted within theproportional limit; the former is the slope of the stress-strain curve at a specified point; thelatter is the slope of a line from the origin to a specified point on the stress-strain curve alsocalled elastic modulus and coefficient of elasticity. Rate of change of strain as a function ofstress. The slope of the straight line portion of a stress-strain diagram. Tangent modulus ofelasticity is the slope of the stress-strain diagram at any point. Secant modulus of elasticityis stress divided by strain at any given value of stress or strain. It also is called stress-strainratio.
23

Fig. 20. Relation between stess-strain.
Tangent and secant modulus of elasticity are equal, up to the proportional limit of a material.Depending on the type of loading represented by the stress-strain diagram, modulus ofelasticity may be reported as: compressive modulus of elasticity (or modulus of elasticityin compression); flexural modulus of elasticity (or modulus of elasticity in flexure); shearmodulus of elasticity (or modulus of elasticity in shear); tensile modulus of elasticity (ormodulus of elasticity in tension); or torsional modulus of elasticity (or modulus of elasticityin torsion). Modulus of elasticity may be determined by dynamic testing, where it can bederived from complex modulus. Modulus used alone generally refers to tensile modulus ofelasticity. Shear modulus is almost always equal to torsional modulus and both are calledmodulus of rigidity. Moduli of elasticity in tension and compression are approximately equaland are known as Modulus of rigidity is related to by the equation:E = 2G (r + 1)Where E is Young’s Modulus (psi), G is modulus of rigidity (psi) and r is Poisson’s ratio.Modulus of elasticity also is called elastic modulus and coefficient of elasticity. Hooke’sLaw: One of the properties of elasticity is that it takes about twice as much force to stretcha spring twice as far. That linear dependence of displacement upon stretching force is calledHooke’s law. In other words, Hooke’s Law gives the relationship between the force appliedto an unstretched spring and the amount the spring is stretched when the force is applied.
This law discovered by the English scientist Robert Hooke in 1660–states that the force fexerted by a coiled spring is directly proportional to its extension dx. The extension of thespring is the difference between its actual length and its natural length (i.e., its length whenit is exerting no force). The force acts parallel to the axis of the spring. Obviously, Hooke’slaw only holds if the extension of the spring is sufficiently small. If the extension becomestoo large then the spring deforms permanently, or even breaks. Such behavior lies beyondthe scope of Hooke’s law. Hooke’s Law states that the restoring force of a spring is directlyproportional to a small displacement. In equation form, we write F = -kx Where x is thesize of the displacement. The proportionality constant k is specific for each spring.
24

Fig. 21. Diagram showing linear dependence of displacement upon stretching force.
Moduli of Elasticity:
1. Young’s modulus (Y ) : Within the elastic limit of a body, the ratio between thelongitudinal stress and the longitudinal strain is called the Young’s modulus of elas-ticity.
Y =longitudinal stress
longitudinal strain=
Fl
A∆l(N/m2)
Where F is the force acting on the surface of area A, ∆l is the increase in length in alength l of the wire.
2. Rigidity modulus (n): Within the elastic limit of a body, the ratio of tangential stressto the shearing strain is called rigidity modulus of elasticity. The rigidity modulus
n =tangential stress
shearing strain=
F/A
l/∆x=
F∆x
Al(N/m2)
Where F/A is the tangential stress, ∆x the displacement in a length l in the perpen-dicular direction
3. Bulk modulus (K ): It is defined as the ratio of stress to volumetric strain.
K =stress
bulk strain=−P∆V
V(N/m2)
Where P is the pressure, V is the original volume and ∆V is the change in volume ofthe material
4. Compressibility: The reciprocal of the bulk modulus is called compressibility.
Compressibility = 1/K
Stress: The restoring force per unit area developed inside the body is called stress
Stress =force
area
The intensity of internal reactive forces in a deformed body and associated unit changesof dimension, shape, or volume caused by externally applied forces. Stress is a measureof the internal reaction between elementary particles of a material in resisting separation,
25

compaction, or sliding that tend to be induced by external forces. Total internal resistingforces are resultants of continuously distributed normal and parallel forces that are of vary-ing magnitude and direction and are acting on elementary areas throughout the material.These forces may be distributed uniformly or no uniformly. Stresses are identified as tensile,compressive, or shearing, according to the straining action. Deformation occurs as a result ofstress, whether that stress be in the form of tension, compression, or shear. Tension occurswhen equal and opposite forces are exerted along the ends of an object. These operate on thesame line of action, but away from each other, thus stretching the object. A perfect exampleof an object under tension is a rope in the middle of a tug-of-war competition. Strain: Thechange produced per unit magnitude of a body is called strain. Three kinds of strain :
1. Longitudinal or linear strain or tensile strain: When an external force is applied to arod along its length the fractional change in its length is called longitudinal strain. Ifl is the original length and ∆l the longitudinal extension.
Longitudinal strain, e = l/∆l
2. Shearing strain or tangential strain: When simultaneous compression and extensionin mutually perpendicular directions take place in a body, the change of shape itundergoes is called shearing strain. If ∆x is the displacement of the upper surface andl the length of the vertical edge, when q is small,
shearing strain, q = l/∆x
3. Bulk strain or volume strain: If V is the original volume and ∆V is the change involume,
bulk strain, v = −V/∆V
The negative sign indicates the decrease in volume. The strains associated with stressare characteristic of the material. Strains completely recoverable on removal of stressare called elastic strains. Above a critical stress, both elastic and plastic strains exist,and that part remaining after unloading represents plastic deformation called inelasticstrain. Inelastic strain reflects internal changes in the crystalline structure of themetal. Increase of resistance to continued plastic deformation due to more favorablerearrangement of the atomic structure is strain-hardening.
Poisson’s ratio: When a sample of material is stretched in one direction, it tends toget thinner in the other two directions. Poisson’s ratio (ν), is a measure of this tendency.Poisson’s ratio is the ratio of the relative contraction strain, or transverse strain (normal tothe applied load), divided by the relative extension strain, or axial strain (in the directionof the applied load). For a perfectly incompressible material deformed elastically at smallstrains, the Poisson’s ratio would be exactly 0.5. Most practical engineering materials havebetween 0.0 and 0.5. Cork is close to 0.0, most steels are around 0.3, and rubber is almost0.5. Some materials, mostly polymer foams, have a negative Poisson’s ratio; if these exoticmaterials are stretched in one direction, they become thicker in perpendicular directions.
ν = −εtransεaxial
26

Assuming that the material is compressed along the axial direction. Where, is the resultingPoisson’s ratio, trans is transverse strain, axial is axial strain. At first glance, a Poisson’sratio greater than 0.5 does not make sense because at aspecific strain the material would reachzero volume, and any further strain would give the material ”negative volume”. UnusualPoisson ratios are usually a result of a material with complex architecture.
Material Rigidity Young’s Modulus Poison’s Ratio(1010N/m2) (1010N/m2)
Steel 7.9 - 8.9 19.5 - 20.6 0.28Aluminium 2.67 7.50 0.34
Copper 4.55 12.4 - 12.9 0.34Iron (Wrought) 7.7 - 8.3 19.9 - 20.0 0.27
Brass 3.5 9.7-10.2 0.34 - 0.38
Procedure
1. Tight the sample (Iron) on Sample stands.
2. Tight the weight holder at the center of sample with the help of screw.
3. Place the spherometer stand, beyond the center of sample (Iron).
4. Adjust the spherometer height with the help of screw according to the sample.(Note: spherometer leg must be in contact by rotating the circular scale with the centerof the sample.)
5. Connect buzzer with adaptor and connect patch cord with banana terminal, providedon the sample for buzzer connection.
6. Switch On the supply for adaptor.
7. Buzzer blows because at this stage spherometer leg is in contact with the sample.
8. Consider spherometer main scale divisions 1 to 20 mm from top to bottom.
9. Note main scale (M.S) reading and circular scale reading (C.S) in observation Table 1and find total reading i.e., T1.(Note: This time there is no load on the sample it is said to be initial reading.)
Increment of the Loads
1. Now place the 500 gm weight on the Weight holder with the help of T - pin, at thisstage buzzer stops blowing because spherometer leg is not in contact with sample owingto bending of rod.
2. Rotate the circular scale of spherometer (clock wise direction) till the buzzer blows (be-cause when it touches the sample, circuit becomes complete and buzzer starts blowing).
27

3. Again note the readings and then evaluate T2.
4. Displacement of sample determined by T2 − T1. Tabulate the reading in ObservationTable 1.
5. Place one more 500 gm weight on the weight holder, total 1 kg weight is hanging, atthis time again buzzer stop blowing because spherometer leg is not in contact withsample.
6. Rotate the circular scale of spherometer till the buzzer blows (because when it touchesthe sample, circuit becomes complete and buzzer starts blowing).
7. Again note the readings and then evaluate T3.
8. Displacement of sample is determined by T3 − T1.
9. Place 500 gm weights one by one on the weight holder i.e., total weight will be 1.5kg,2kg, 2.5kg and 3.0kg. For these different weights position, repeat the steps 5 to 8 andtabulate the readings for T4, T5, T6 and T7.
Decrement of the Loads
Sr. Load Load increasing Displa- Load decreasing Displa- MeanNo. (kg) (mm) -cement (mm) -cement Displacement
(x mm) (x mm) (in mm)
MS CS T= xn = MS CS T= yn = d = (x+ y)/2MS+ Tn+1 − T1 MS+ T1 − Tn+1
CS* CS*0.01 0.01
1 0.0 T1 T1
2 0.5 T2 x1 T2 y1 d1
3 1.0 T3 x2 T3 y2 d2
4 1.5 T4 x3 T4 y3 d3
5 2.0 T5 x4 T5 y4 d4
6 2.5 T6 x5 T6 y5 d5
7 3.0 T7 x6 T7 y6 d6
1. At 0 kg load decreasing, spherometer reading is same as 3 kg increasing load. It meansT7 for increasing load and T1 for decreasing load is same.
2. Now remove 500 gm weight from the weight holder (i.e., decreasing of 0.5kg load fromsample) and again find total reading. This spherometer reading is T2. (Note : Beforeremoving the weights rotate the spherometer fully anticlockwise.)
28

3. Displacement of sample is T1 − T2.
4. Remove 500 gm weights one by one from the weight holder i.e., decrement of load willbe1kg, 1.5kg, 2kg, 2.5kg and 3kg respectively. For these different weights position,repeat the steps and tabulate the readings for T3, T4, T5, T6 and T7.
1. Take the mean of displacements individually d1 = (x1 + y1)/2, d2 = (x2 + y2)/2, ....and so on.
2. In Observation Table 2, insert all the values of individual mean of displacements d1,d2, d3........
3. Find the depression of sample for particular amount of weight difference (for eg. 1 kg).So d3 − d1, d4 − d2, d5 − d3, d6 − d4 is a depression for 1kg difference.
4. Tabulate the depression (readings for 1 kg in given Observation Table 2).
5. Take the mean of depression.
Sr. No. Load (kg) Mean of Displacements Depression for 1 Kg (mm)(mm) (for any particular amount)
1. 0.0
2. 0.5 d1=.....
3. 1.0 d2=..... d3 − d1 =.....
4. 1.5 d3=..... d4 − d2 =.....
5. 2.0 d4=..... d5 − d3 =.....
6. 2.5 d5=..... d6 − d4 =.....
7. 3.0 d6=.....
Take the length, breadth, depth of a given material of samplel =................... (in meter)b =................... (in meter)d =................... (in meter)Put all the readings in given formula, where Y is elastic constant or Young’s Modulus ofelasticity.
Y =m g l3
4 b d δ
Where m is mass (in kg) for which at particular load, depression had determined (here itis 1 kg.), g = 9.8 m/sec2, length (l), breadth (b), depth (d), and depression in meters, andthen elastic constant (Y ) is in N/m2.
Now take Aluminium and Brass samples one by one to determine their Youngs modulusof Elasticity, follow the same procedure as for Iron sample.
29

Calculation
Error Calculation
Results
Precaution
These are the following precautions to be taken during the experiments.
1. After performing the experiment remove all the weights from the weight holder.
2. The elasticity of Aluminium and Brass samples is less so doesnt exceed weight morethan 1.5kg on weight holder.
3. ...
4. ...
30

Experiment No. 9:Forced Oscillations - Pohl’s pendulum
This experimant is to understand the forced oscillations using Pohl’s pendulum.
Aim
• Free oscillation
1. To determine the oscillating period and the characteristic frequency of the un-damped case.
2. To determine the oscillating periods and the corresponding characteristic frequen-cies for different damping values. Successive, unidirectional maximum amplitudesare to be plotted as a function of time. The corresponding ratios of attenuation,the damping constants and the logarithmic decrements are to be calculated.
3. To realize the aperiodic case and the creeping.
• Forced oscillation
1. The resonance curves are to be determined and to be represented graphicallyusing the damping values of A.
2. The resonance frequencies are to be determined and are to be compared with theresonance frequency values found beforehand.
3. The phase shifting between the torsion pendulum and the stimulating externaltorque is to be observed for a small damping value assuming that in one case thestimulating frequency is far below the resonance frequency and in the other caseit is far above it.
Fig. 22. Experimental set-up for free and forced torsional vibration.
31

Fig. 23. Electrical connection of the experiment. Fig. 24. Phase shifting of forced oscillationfor different dampings.
Procedure
The experiment is set up as shown in Fig. 1a and 1b. The DC output U− of the powersupply unit is connected to the two upper sockets of the DC motor. The eddy current brakealso needs DC voltage. For this reason a rectifier is inserted between the AC output U− ofthe power supply unit and the entrance to the eddy current brake. The DC current suppliedto the eddy current brake, IB, is indicated by the ammeter.
To determine the characteristic frequency ω0 of the torsion pendulum without damping(IB = 0), the time for several oscillations is measured repeatedly and the mean value ofthe period T 0 calculated. In the same way the characteristic frequencies for the dampedoscillations are found using the following current intensities for the eddy current brake:IB ∼ 0.25A, (U∼ = 4V )IB ∼ 0.40A, (U∼ = 6V )IB ∼ 0.55A, (U∼ = 8V )IB ∼ 0.90A, (U∼ = 12V )
To determine the damping values for the above mentioned cases the decrease in amplitudeis measured by deflecting the pendulum completely to one side while observing the magnitudeof successive amplitudes on the other side. Initially it has to be ensured that the pendulumpointer at rest coincides with the zero-position of the scale. This can be achieved by turningthe eccentric disc of the motor.
To realize the aperiodic case (IB ∼ 1.5A) and the creeping case (IB ∼ 2.0A) the eddycurrent brake is briefly connected directly to the DC output Uof the power supply unit.
To stimulate the torsion pendulum, the connecting rod of the motor is fixed to the upperthird of the stimulating source. The DC voltage U− of the power supply unit must be set tomaximum. The stimulating frequency ωa of the motor can be found by using a stopwatchand counting the number of turns. The measurement begins with small frequencies. ωais increased by means of the motor-potentiometer setting coarse. In the vincinity of themaximum ωa is changed in small steps using the potentiometer setting fine. In each case,readings should only be taken after a stable pendulum amplitude has been established. Inthe absence of damping or for only very small damping values, ωa must be chosen in such away that the pendulum does not exceed its scale range.
32

Theory
• Undamped and damped free oscillation
In case of free and damped torsional vibration torques M1 (spiral spring) and M2 (eddycurrent brake) act on the pendulum. We have
M1 = −D0φ and M2 = −Cφ
φ = angle of rotationφ = angular velocityD0 = torque per unit angleC = factor of proportionality depending on the current which supplies the eddy currentbrake
The resultant torque,M = −D0φ− Cφleads us to the following equation of motion:
Iφ+ Cφ+D0φ = 0 (1)
I = pendulums moment of inertiaφ = angular acceleration
Dividing the above equation by I and using the abbreviations
δ =C
2Iand ω2
0 = D0/I
results in
φ+ 2δφ+ ω20φ = 0 (2)
δ is called “damping constant” and ω0 is characteristic frequency of the undamped system.The solution of the differential equation (2) is
φ(t) = φ0e−δt cos ωt (3)
with, ω =√ω2
0 − δ2 (4)
Eq. (3) shows that the amplitude φ(t) of the damped oscillation has decreased to the e-thpart of the initial amplitude φ0 after the time t = 1/6 has elapsed. Moreover, from Eq. (3)it follows that the ratio of two successive amplitudes is constant.
φnφn+1
= K = eδT (5)
K is called the “damping ratio” and the quantity
Λ = lnK = δT = lnφnφn+1
(6)
is called the “logarithmic decrement”. Eq. (4) has a real solution only if ω20 > δ2. For
ω20 = δ2, the pendulum returns in a minimum of time to its initial position without oscillating
(aperiodic case). For ω20 < δ2, the pendulum returns asymptotically to its initial position
(creeping).
33

• Forced oscillation
If the pendulum is acted on by a periodic torque Ma = M0 cos ωat Eq. (2) changes into
φ+ 2δφ+ ω20φ = F0 cos ωat (7)
with, F0 =M0
I
In the steady state, the solution of this differential equation is
φ(t) = φa cos (ωat− α) (8)
where
φa =φ0√{
1−[ωaω0
]2}2
+
[2δ
ω0
ωaω0
]2(9)
and φ0 =F0
ω20
; Furthermore:
tan α =2δωa
ω20 − ω2
a
; respectively
α = arc tan2δωa
ω20 − ω2
a
(10)
An analysis of Eq. (9) gives evidence of the following:
1. The greater F0, the greater φa
2. For a fixed value F0 we have: φa −→ φmax for ωa ' ω0
3. The greater δ, the smaller φa
4. For δ = 0 we find: φa −→∞ if ωa = ω0
I/AI
δ/s δ/s−1 ω =
√ω2
0 − δ20/s K =
φnφn+1
Λ
0.25 16.7 0.06 3.46 1.1 0.12
0.40 6.2 0.16 3.45 1.4 0.31
0.55 3.2 0.31 3.44 1.9 0.64
0.90 1.1 0.91 3.34 5.6 1.72
Fig. 2 shows the phase difference of the forced oscillation as a function of the stimulatingfrequency according to Eq. (10). For very small frequencies ωa the phase difference isapproximately zero, i.e. the pendulum and the stimulating torque are inphase. If ωa is muchgreater than ω0, pendulum and stimulating torque are nearly in opposite phase to each other.
34

The smaller the damping, the faster the transition from swinging inphase to the in oppositephase state can be achieved.
The mean value of the period T 0 and the corresponding characteristic frequency ω0 of thefree and undamped swinging torsional pendulum are found to be
T 0 = (1.817 ± 0.017) sec;∆T 0
T 0
= ± 1%
and ω0 = (3.46 ± 0.03) sec−1
Fig. 3 illustrates the decrease in the unidirectional amplitude values as a function of timefor free oscillation and different dampings. Fig. 4 shows the resonance curves for differentdampings. Evaluating the curves leads to medium resonance frequency ω = 3.41 s−1.
Observation
For undamped oscillation
Average Time Period (For 10 oscillation) = (... + ... + ... + ... + ...)/5 sec.
Average Frequency = ... Hz.
For damped free oscillation
For I=... A For I=... A For I=... A For I=... A
Time Ampli- Time Ampli- Time Ampli- Time Ampli-Period -tude Period -tude Period -tude Period -tude
Fig. 25. Maximum values of unidirectional amplitudes as a function of time for differentdampings.
35

Fig. 26. Resonance curves for different dampings.
For forced oscillation
For I=... A For I=... A For I=... A
Time freq- Ampli- Time freq- Ampli- Time freq- Ampli-Period -uency -tude Period -uency -tude Period -uency -tude
Calculation
Error Calculation
Results
Precaution
These are the following precautions to be taken during the experiments.
1. ...
2. ...
3. ...
4. ...
36

Experiment No. 10:Capacitance of metal spheres and of a
spherical capacitor
This experimant is to measure capacitance of metal spheres and of a spherical capacitor.
Aim
1. Determination of the capacitance of three metal spheres with different diameters.
2. Determination of the capacitance of a spherical capacitor.
3. Determination of the diameters of each test body and calculation of their capacitancevalues.
Procedure
Part 1:
The experimental set-up to determine the capacitance of spherical conductors is shownin Fig. 1. Fig. 2 only shows the part of the experimental set-up which must be modified inorder to determine the capacitance of a spherical capacitor. The spherical conductor (d = 2cm) held on a barrel base and insulated against the latter is connected by means of the highvoltage cord over the 10 M- protective resistor to the positive pole of the 10 kV output ofthe high voltage power supply. The negative pole is earthed. This sphere is briefly broughtinto contact with the test spheres to charge it. High voltage always must be reset to zeroafter charging. After every measurement, the charging voltage is increased by 1 kV. Beforebeing charged anew, the test spheres must be discharged through contact with the free earthconnecting cable. The charges of the test spheres are determined with a measuring amplifier.The high-resistance input of the electrometer is used for this. An auxiliary 10 nF capacitoris connected in parallel to the BNC test cord fitted with the adapter required to take overthe charge.
The capacitances of the spherical conductors are determined from the voltage and chargevalues; this is done using the average calculated over a number of charge measurement values.
Never apply high voltage to the amplifier input.
Part 2:
To determine the capacitance of a spherical capacitor, the experimental set-up is alteredas shown in Fig. 2. The Cavendish hemispheres are put together so as to form a com-plete sphere with a small circular orifice at the top. The plastic sphere with conductingsurface is suspended from a copper wire in the centre of the sphere. The copper wire is leadthrough a glass capillary tube which is wrapped in earthed aluminium foil to neutralise straycapacitances (Fig. 3). The aluminium foil may not touch the hemispheres.
37

The interior sphere must be connected to the central socket of the high voltage powersupply. This is done by means of a crocodile clip over the high voltage cord, before whicha 10 M protective resistor is connected. The lower socket is earthed again. Voltage isincreased in steps of 100 V and may not increase above 1000 V for the safety of the digitalmultimeter. The corresponding mean values of the charges are read determined for thehemispheres similarly as described in Part. After every measurement, the hemispheres mustbe discharged with the free earthing cord. Whilst doing this, it must be assured that nohigh voltage is induced.
Theory
Part 1:
The capacitance C of a sphere with radius R is given by:C = 4πε0R(electrostatic induction constant ε0 = 8.86 ×10−12 As/Vm ) (1)
Using (1), the capacitance of the conducting spheres may be calculated:Sphere (2R1 = 0.121 m) : C = 6.70× 10−12 As/V = 6.70 pFSphere (2R2 = 0.041 m) : C = 2.28× 10−12 As/V = 2.28 pFSphere (2R3 = 0.021 m) : C = 1.22× 10−12 As/V = 1.22 pF
Using (2), the voltage values U1, which were determined by means of the measuringamplifier, allow to determine the corresponding charge value Q:
Q = (Cco + Cca)U1 = (Cco + Cca)U
V;
with (Cco � Cca);Q = CcaU1 =U
V(Cco = capacitance of the conductors; Cca = capacitance of the parallel capacitor; U =displayed voltage; V = amplification factor; U1 = measured voltage)
On the other hand, the charge Q of the conductor is: Q = CcoU2 Finally, charges may becalculated using (2) and (3).
U1/U2 = Cco/Cca
Fig. 4 shows charging voltage values U2 as a function of measurement voltage U1 for thedifferent conducting spheres. With the slope of the lines and knowing Cca, the capacitancesof the conducting spheres are obtained:
C(R1) = 7.55 pF ;C(R2) = 2.33 pF ;C(R3) = 1.32 pF
(With the assistance of a measuring bridge, the capacitance Cca of the parallel capacitorwas determined separately to be Cca = 9.1 nF. If exact capacitance determination is impos-sible, the nominal capacitance value of the capacitor must be used for calculation; this may,however, be affected by design tolerance deviations of ± 10%).
Part 2: The capacitance C of a spherical capacitor is given by
38

C = 4πε0
(r1r2r2 − r1
);
r1 = Radius of the interior sphere;r2 = Radius of the exterior sphere
With r1 = 0.019 m and r2 = 0.062 m for the spherical capacitors, capacitance calculationyields C = 3.0 pF .
Fig. 5 once more represents measurement value pairs U1 and U2. According to theassessment procedure described above and using the slope of the graph line, the empiricallydetermined capacitance of the spherical capacitor is found to be C = 3.5 pF .
Capacitance values determined experimentally are always higher than the calculated val-ues. This discrepancy is due to unavoidable dispersive capacitances.
39


















![[PHY103] Infographics of the Physics Course PHY103 for Mechanical Engineering Students](https://img.pdfslide.net/doc/110x75/54c471ac4a7959251f8b459d/phy103-infographics-of-the-physics-course-phy103-for-mechanical-engineering-students.jpg)



![[PHY103] Introduction to General Physics for Engineering Students 1/2013](https://img.pdfslide.net/doc/110x75/5452cc34af7959ed5f8b771c/phy103-introduction-to-general-physics-for-engineering-students-12013.jpg)


