Embed Size (px)
Citation preview

G. FerrareseD. Bini
Introduction to RelativisticContinuum Mechanics
ABC

Authors
Donato Bini Giorgio FerrareseIstituto per le Applicazioni Università Roma La Sapienzadel Calcolo ‘Mauro Picone’ CNR Dipartimento di MatematicaViale del Policlinico, 137 Piazzale Aldo Moro, 200161 Roma, Italy 00185 Roma, [email protected] [email protected]
G. Ferrarese and D. Bini, Introduction to Relativistic Continuum Mechanics, Lect. NotesPhys. 727 (Springer, Berlin Heidelberg 2008), DOI 10.1007/978-3-540-73168-9
Library of Congress Control Number: 2007929739
ISSN 0075-8450ISBN 978-3-540-73166-5 Springer Berlin Heidelberg New York
This work is subject to copyright. All rights are reserved, whether the whole or part of the material isconcerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting,reproduction on microfilm or in any other way, and storage in data banks. Duplication of this publicationor parts thereof is permitted only under the provisions of the German Copyright Law of September 9,1965, in its current version, and permission for use must always be obtained from Springer. Violationsare liable for prosecution under the German Copyright Law.
Springer is a part of Springer Science+Business Mediaspringer.comc© Springer-Verlag Berlin Heidelberg 2008
The use of general descriptive names, registered names, trademarks, etc. in this publication does not imply,even in the absence of a specific statement, that such names are exempt from the relevant protective lawsand regulations and therefore free for general use.
Typesetting: by the authors and Integra using a Springer LATEX macro packageCover design: eStudio Calamar S.L., F. Steinen-Broo, Pau/Girona, Spain
Printed on acid-free paper SPIN: 12073191 5 4 3 2 1 0

To Liliana and Daniela

Preface
In standard university courses, the teaching of special relativity is often limitedto show the absolute (i.e. four-dimensional) formulation of relativistic kine-matics, mechanics and electromagnetism, whereas the equally interesting longchapters of geometrical continua and fluid dynamics are left for the generalrelativity investigation only. Actually, students become familiar with relativis-tic kinematics and the relativistic formulation of electromagnetism even fromtheir first-year courses, and this is a really important step in their formation.However, they are given very little information about the so-called relativeobserver point of view in relativity and the different ways in which one canreintroduce the classical concepts of space and time, 3-momentum and energy,etc. from their space-time counterparts, namely the space-time itself, the 4-momentum, etc. The formalisms underlying this decomposition process, or3+1 splitting techniques, have been widely developed starting from the 1950sbut can be found only in General Relativity textbooks.
We consider strongly important to make students familiar with SpecialRelativity either from the absolute (space-time, four-dimensional) point ofview or from the relative (space plus time, 3 + 1-dimensional) point of view,in order to give a central role to the measurement problem and to the observer,even studying Special Relativity.
This book, which apart from standard topics, includes also a geometricalintroduction to continuous media and fluid dynamics, aims at pursuing aneffort in this direction, summarizing the Italian school contribution with thepioneering works of Carlo Cattaneo since 1950 at the University of Rome,Italy.
It is therefore a pleasure to acknowledge Prof. Wolfgang Rindler, an “oldfriend” of Cattaneo and his coworkers since about 50 years, for many stim-ulating discussions and useful suggestions in addition to his special effort inimproving the content as well as the English of this manuscript. Moreover, weare also grateful to Prof. L. Stazi for his comments and the careful reading ofthe hundreds of formulas in the manuscript.

VIII Preface
A final remark concerns the reader: he is supposed to be familiar enoughwith ordinary tensor calculus on Riemannian manifolds and endowed with agood amount of patience!
Rome, Giorgio FerrareseFebruary 2007 Donato Bini

Contents
1 Classical Physics: Axiomatic Formulation . . . . . . . . . . . . . . . . . . 11.1 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 General Axioms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Axioms of Newtonian Mechanics . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Axioms of Maxwell’s Electromagnetism . . . . . . . . . . . . . . . . . . . . 81.5 Optical Experiments and Classical Physics . . . . . . . . . . . . . . . . . . 12References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 Space-Time Geometry and Relativistic Kinematics . . . . . . . . 212.1 Introduction to Special Relativity . . . . . . . . . . . . . . . . . . . . . . . . . 212.2 General Axioms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.3 The Minkowski Space-time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.4 The Minkowski Metric . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.5 Vectors and Their Classification. The Lightcone . . . . . . . . . . . . . 312.6 Elements of the Geometry of Minkowski Space-time . . . . . . . . . . 342.7 Proper Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.8 Test Particle Kinematics (Absolute and Relative) . . . . . . . . . . . . 392.9 Lorentz Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.10 General Lorentz Transformations: I . . . . . . . . . . . . . . . . . . . . . . . . 452.11 Relativity of Lengths and Times . . . . . . . . . . . . . . . . . . . . . . . . . . . 492.12 Muon Mean Life and the Time Dilation . . . . . . . . . . . . . . . . . . . . 512.13 Theorem of Relative Motions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522.14 Optical Experiments and Special Relativity . . . . . . . . . . . . . . . . . 562.15 Coriolis Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 582.16 Vectorial Maps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 602.17 Levi–Civita Indicator and Ricci Tensor . . . . . . . . . . . . . . . . . . . . . 652.18 General Lorentz Transformations: II . . . . . . . . . . . . . . . . . . . . . . . 672.19 General Lorentz Transformations: III . . . . . . . . . . . . . . . . . . . . . . 97References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107

X Contents
3 Test Particle Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1093.1 Fundamental Laws of Test Particle Dynamics . . . . . . . . . . . . . . . 1093.2 Cauchy Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1123.3 Classification of 4-Forces. Conservative Forces . . . . . . . . . . . . . . . 1143.4 Constrained Material Point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1163.5 The Conservative Case. Hamiltonian Formulation . . . . . . . . . . . . 1173.6 The Relative Formulation of the Dynamics . . . . . . . . . . . . . . . . . 1203.7 Transformation Laws: Unification Between Mechanics
and Heat Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1243.8 The Cauchy Problem in Relative Dynamics . . . . . . . . . . . . . . . . . 1273.9 The Intrinsically Conservative Case . . . . . . . . . . . . . . . . . . . . . . . . 1293.10 Pure Mechanics: Particles with Scalar Structure . . . . . . . . . . . . . 1303.11 The Conservative Case in a Classical Sense . . . . . . . . . . . . . . . . . 1313.12 Classical Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1343.13 Unified Scheme: Particles and Photons . . . . . . . . . . . . . . . . . . . . . 1353.14 Fundamental Invariants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1373.15 Particle and Photon Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1393.16 Unified Relative Dynamics of Particles . . . . . . . . . . . . . . . . . . . . . 1403.17 An Alternative to the Unified Dynamics . . . . . . . . . . . . . . . . . . . . 143References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
4 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1474.1 Principal Tetrad for Nonnull Curves in M4 . . . . . . . . . . . . . . . . . 1474.2 Frenet–Serret Formalism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1494.3 Curvature and Torsions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1504.4 Intrinsic Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1544.5 Conservative Lorentz-like Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . 1564.6 Central Forces in a Galilean Frame . . . . . . . . . . . . . . . . . . . . . . . . 1584.7 The Keplerian Case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1604.8 Motion of Charged Particles in a Uniform Magnetic Field . . . . . 1634.9 Extension of Maxwell’s Equations to any Galilean Frame . . . . . 165References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
5 Relativistic Kinematics for a Three-Dimensional Continuum1695.1 Continuum Mechanics. Relative Representation of the Motion . 1695.2 Fundamental Kinematical Fields . . . . . . . . . . . . . . . . . . . . . . . . . . 1725.3 Shear and Vorticity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1755.4 Christoffel Symbols and Covariant Derivative . . . . . . . . . . . . . . . 1785.5 Local Analysis of the Motion of a Continuum . . . . . . . . . . . . . . . 1835.6 Passing from One Galilean Frame to Another . . . . . . . . . . . . . . . 1865.7 Kinematical Invariants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1895.8 Dilation Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1935.9 Transformation Laws for Angular and Deformation Velocities . 1965.10 Born Rigidity. Thomas Precession . . . . . . . . . . . . . . . . . . . . . . . . . 201

Contents XI
5.11 Material Continuum. Number and Matter Density . . . . . . . . . . 2035.12 Absolute Kinematics. Proper Quantities . . . . . . . . . . . . . . . . . . . . 204References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
6 Elements of Classical Dynamics of a Continuum . . . . . . . . . . . 2076.1 Introduction to Continuum Classical Dynamics . . . . . . . . . . . . . . 2076.2 Lagrangian Form of the Fundamental Equations . . . . . . . . . . . . . 2116.3 Isotropic Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2136.4 Symbolic Relation of Continuum Mechanics . . . . . . . . . . . . . . . . . 2156.5 Reversible Transformation Systems. Free Energy . . . . . . . . . . . . 2176.6 Perfect Fluids. Characteristic Equation and Specific Heat . . . . . 2206.7 Perfect Gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2226.8 General Expression for the Power of the Internal Forces . . . . . . 2246.9 Isotropic Systems: Constitutive Equations . . . . . . . . . . . . . . . . . . 2266.10 Dynamical Compatibility of a Continuum . . . . . . . . . . . . . . . . . . 2296.11 Hyperelastic Continua: Intrinsic Dynamics . . . . . . . . . . . . . . . . . . 2346.12 Cauchy Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
7 Elements of Relativistic Dynamics of a Continuum . . . . . . . . 2397.1 Relativistic Extension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2397.2 Proper Mechanical Stresses and Thermal Energy . . . . . . . . . . . . 2417.3 Space-time Splitting Techniques. The Energy Tensor . . . . . . . . . 2447.4 Dust Matter and Perfect Fluids . . . . . . . . . . . . . . . . . . . . . . . . . . . 2467.5 Absolute Dynamics of Ordinary Relativistic Continua . . . . . . . . 2487.6 Relative Dynamics of Ordinary Relativistic Continua . . . . . . . . 2527.7 Transformation Laws of the Fundamental Relative Quantities . 2547.8 Energy Theorem and the First Law of Thermodynamics . . . . . . 2587.9 Continua Without Material Structure . . . . . . . . . . . . . . . . . . . . . . 260References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
8 Elements of Relativistic Thermodynamics of a Continuum . 2638.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2638.2 Nonpolar Continua . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2648.3 Proper Thermodynamics of the Nonpolar Continua . . . . . . . . . . 2678.4 Relative Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2698.5 Transformation Laws of the Fundamental Relative Quantities . 2728.6 Classical Form of the Relativistic Cauchy Equation . . . . . . . . . . 2748.7 Transformation Laws of the Dynamical Stresses . . . . . . . . . . . . . 2768.8 Nonviscous Fluids and Dynamical Pressure . . . . . . . . . . . . . . . . . 2788.9 Lagrangian Form of the Relativistic Cauchy Equation . . . . . . . . 2798.10 Lagrangian Form of the Power of the Internal Forces . . . . . . . . . 2818.11 Energy Theorem and First Law of Thermodynamics . . . . . . . . . 2848.12 Finite Deformations in Relativity. Isotropic Systems . . . . . . . . . 2878.13 Continua Without Material Structure . . . . . . . . . . . . . . . . . . . . . . 289

XII Contents
8.14 Reversible Systems Without Material Structure . . . . . . . . . . . . . 2918.15 Isotropic Reversible Systems Without Material Structure . . . . . 2938.16 Perfect Fluids with Heat Transfer . . . . . . . . . . . . . . . . . . . . . . . . . 2958.17 Introduction to the Cauchy Problem . . . . . . . . . . . . . . . . . . . . . . . 296References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306
9 Relativistic Electromagnetism in Vacuum . . . . . . . . . . . . . . . . . . 3099.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3099.2 Sources and Electromagnetic Action. Axioms . . . . . . . . . . . . . . . 3119.3 Electromagnetic Tensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3139.4 Absolute Formulation of Maxwell’s Equations . . . . . . . . . . . . . . . 3159.5 Homogeneous Form of Maxwell’s Equations . . . . . . . . . . . . . . . . . 3189.6 Transformation Laws of Electric and Magnetic Fields . . . . . . . . 3209.7 Invariants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3229.8 Energy Tensor of the Electromagnetic Field . . . . . . . . . . . . . . . . . 3249.9 Splitting of the Energy Tensor of the Electromagnetic Field . . . 3269.10 Spectral Analysis of the Electromagnetic Tensor . . . . . . . . . . . . . 3279.11 Spectral Analysis of the Energy Tensor of the Electromagnetic
Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3299.12 Electromagnetic 4-Potential. Gauge Invariance . . . . . . . . . . . . . . 3319.13 The Material and the Electromagnetic Schemes . . . . . . . . . . . . . 3339.14 Evolution Equations for a Charged Material System . . . . . . . . . 335References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339

1
Classical Physics: Axiomatic Formulation
1.1 Methodology
Mathematical sciences contribute to physics either at an instrumental level(algebra and geometry give in fact the descriptional methods, whereas anal-ysis gives the calculus methods for a qualitative and quantitative control ofsolutions corresponding to a certain schematization) or at a methodologicallevel.
Nowadays, physical theories can be regarded as true axiomatic construc-tions which make them very close to mathematical theories. However, sucha relation between mathematical and physical theories should not be pushedover the limit in which their different roles come to be confused. In fact,both mathematical and physical theories are obviously related through the“hypothetical-deductive method”, but they are substantially different. As con-cerns their similarities, both of them assume a certain set of objects (primaryquantities) and relations among them given a priori (axioms or postulates).Axioms must only be compatible. Then, from the primary quantities oneobtains, by definition, some other objects (secondary quantities) and the rela-tions between primary and secondary quantities are logically derived by meansof theorems.
In any mathematical theory, the choice of objects and axioms is completelyfree, apart from their logical consistency: to the primary and secondary quan-tities, the theory cannot give any concrete meaning and what is really impor-tant are the relations existing among such objects only; as a consequence ofthis universality, the theory can be applied to many different situations.
For a physical theory instead, the objects must have a precise meaning interms of the physical reality they represent, in the sense that they necessarilymust have a counterpart in real objects. Moreover, all the observable relationsamong the real objects must be in agreement with the relations postulated ordeduced from the theory. In other words, together with the “internal coher-ence” of the theory, a “perfect correspondence” between the theory and thereality is required.
G. Ferrarese and D. Bini: Classical Physics: Axiomatic Formulation, Lect. Notes Phys. 727,
1–20 (2008)
DOI 10.1007/978-3-540-73168-9 1 c© Springer-Verlag Berlin Heidelberg 2008

2 1 Classical Physics: Axiomatic Formulation
This principle directly inspired both Mach and Einstein. According to sucha point of view, a physical theory, differently from a mathematical one, comesout not only as a consequence of a single intuition, but it is the result ofa series of intuitions and comparing with the reality, with possible adjust-ments of the initial theory as well as of the control procedures. Moreover, anyphysical theory, even in the case of the long-awaited unified model, is nevercomplete or definitive because it must include all phenomena and it has tobe in agreement with all the observable relations among them (in the pastas well as in the future). Apart from the discovery of new phenomena, theagreement is conditioned to the sensitivity of the instruments, to the refiningof the experimental techniques, etc.
Actually, the assessment of the physics is the result of many theories (me-chanics, electromagnetism, heat theory, thermodynamics, etc.), each with itsown postulates, in addition to the general axioms common to all the theories.If the methods which control the theory reveal a discrepancy between thetheoretically expected results and the experimental ones, first to be modifiedwill be the specific axioms of a theory; then, if this is not enough, the generalpostulates will be changed.
In the history of modern physics, there existed two different moments inwhich the general postulates have been modified. The first concerns the black-body spectrum: the disagreement between theory and experiments was dras-tically solved renouncing the continuity hypothesis of the energy exchangesbetween radiation and matter (Planck, 1900). This led to the birth of quan-tum mechanics, associated with the names of Bohr (1913), Born, Schrodinger,Heisenberg and Dirac (1915).
The second concerns relativity: the disagreement between theory and ex-periments (especially after the Michelson–Morley experiment, 1887–1891) wasdrastically solved renouncing to the traditional ideas of space and time. Thisled to the Theory of Special Relativity [1], thanks to great contribution of A.Einstein (1905).
Examining the main ideas of that theory is the aim of this book.
1.2 General Axioms
In pre-relativistic physics, there exist two fundamental schemes only: the ma-terial scheme and the electromagnetic one; in correspondence, there exist twodifferent theories: mechanics and electromagnetism. Each natural phenomenonwas framed, in a simple way, in one of these two theories. Therefore, in theassessment of pre-relativistic physics, we find a set of general axioms and twomore sets of specific axioms; the first one concerning mechanical phenomenaand the second the electromagnetic ones.
There are three general axioms:

1.2 General Axioms 3
A. Existence of an absolute space, E3
This axiom aims at specifying the ambient, i.e. the most natural de-scriptional context, for all the physical phenomena. The postulated abso-lute space, E3, is a strictly Euclidean three-dimensional space. Its points(primary quantities) can be referred, for instance, to orthogonal Carte-sian coordinates xi (i = 1, 2, 3), associated with an orthonormal frameT = (O, ci), having its origin in O and unit vectors ci. To denote the dis-tance between the points O and P, we will write OP = xici (the summa-tion with respect to the dummy index i is assumed). Once the orthonormalframe is fixed, the coordinates xi of P are uniquely determined.
Passing to another orthonormal frame T ′ = (O′, ci′ ), the same pointP will have coordinates x′i: O′P = xi′ci′ .1 The relation between xi andxi′ is obtained expressing the vectors ci′ as a linear combination of thevectors ci:
ci′ = Rii′ci ∼ ci = Ri′
ici′ , (1.1)
where the matrices ||Rii′ || and ||Ri′
i|| are inverses of each other (we willfollow the convention that the upper index is the row index and the lowerindex is the column one). In fact, the vectors {ci} and {ci′}, as defined in(1.1), are orthonormal:
ci′ · ck′ = δi′k′ ∼ ci · ck = δik , (1.2)
where δik is the Kronecker symbol
δik ={
0 if i �= k ,1 if i = k .
(1.3)
By using (1.1) in (1.2), one obtains the orthogonality conditions:
Rii′Rk
k′δik = δi′k′ ∼ Ri′iRk′
kδi′k′ = δik . (1.4)
Moreover, the triangular relation OP = OO′ + O′P, assuming
OP = xici , OO′ = T ici , O′P = xi′ci′ = xi′Rii′ci , (1.5)
gives the linear and invertible relations:
xi = Rii′x
i′ + T i . (1.6)
The invertibility of (1.6), implicit in the interchangeability of the coordi-nates xi and xi′ (the exchange is equivalent to moving the prime to thoseletters which are without), is also a consequence of (1.4), which gives thecondition (
det||Rii′ ||)2
= 1 ; (1.7)
1 Following a standard convention for tensorial calculus, the prime is put on theindex and not on the kernel.

4 1 Classical Physics: Axiomatic Formulation
that is, the (orthogonal) matrix Rii′ has its determinant equal to ± 1 and
represents a rotation (+ 1) or an antirotation (− 1). Furthermore, (1.6)shows that the coefficients Ri
i′ , besides the meaning of relating vectorcomponents in (1.1), coincide with the derivatives of xi with respect tothe xi′ :
Rii′ =
∂xi
∂xi′ ∼ Ri′i =
∂xi′
∂xi. (1.8)
It is implicit in axiom A that the whole physical reality can be representedin terms of the geometric ingredients of E3: points, curves, surfaces, ten-sor fields, etc., which have an intrinsic meaning in E3, that is they areindependent of the choice of the triad; this latter always has an accessoryrole, being determined up to translations and rotations (equivalence oforthonormal Cartesian frames).
The use of orthogonal Cartesian coordinates (the most simple in E3
and with a global meaning), of course, does not prevent the use of othercoordinates (polar, cylindrical or curvilinear in general), often with a localmeaning only.
B. Existence of an absolute timeThis axiom postulates the existence of a universal time, that is, a well-determined sequence of instants, independent of the space E3 and henceof the observer and his motion (absolute clock). This axiom allows anyobserver not only to order phenomena happening in a given place (localcalendar) but also to compare elementary phenomena which occur at dif-ferent points in E3, as well as to specify if they are simultaneous (notionof contemporaneity) or not (notion of temporal ordering). Everything isdone objectively, i.e. independently of the observer and his motion.
It is also implicit, in axiom B, that every phenomenon has a well-determined temporal duration,2 the evaluation of which depends on thechoice of a temporal coordinate t:
t = at′ + b , a > 0 , (1.9)
defined up to a linear transformation, in the sense that it is still possibleto choose both the origin (b) and the unit (a).
From the mathematical point of view, the absolute time is representedby an ordered set of instants, say T (not ordered, when inverting thetime is allowed), homeomorphic to an oriented straight line R. The Carte-sian product R×E3 defines the space-time of classical physics, i.e. a newabsolute: E4, which is a four-dimensional manifold, with a foliation struc-ture, and spatially homogeneous and isotropic. From the physical pointof view, axiom B implies the existence of synchronizable standard clocks,working absolutely, i.e. independently of position, velocity and physicalphenomena.
2 “Tempus absolutum, verum et mathematicum, in se et natura sua, sine relationead externum quodvis, aequabiliter fluit, alioque nomine dicitur duratio”[2].

1.2 General Axioms 5
However, primary quantities are the points P ∈ E3 and the instants oftime; derived quantities are the event E, characterized by a point and aninstant, with a physical correspondence in elementary phenomena (e.g. thelighting of a lamp, the ring of a bell, etc.), and the material points, afterthe introduction of the concept of mass. The latter have their physicalcounterpart in the material elements, say the molecules,3 which aggregateto form the various natural bodies or the physical world.
The study of physical reality and its laws obviously presupposes thepresence of the observer or the concept of a global reference frame, withits (absolute) measurement instruments for lengths and times.
Generally, one identifies frames with coordinate systems; actually, theconcept of frame is more general and related to the so-called natural un-deformable bodies (rigid frames or solids, for brevity). In fact, a physicalreference frame is any natural body on which one can put a system ofCartesian coordinates. So a reference solid has to be necessarily an inde-formable body.
In this sense, any Cartesian triad T in E3 defines a unique solid frame,made up by the space of all the points in T . Conversely, the same solidframe is characterized not only by T but by any other triad which can beobtained from T by time-independent translations and rotations.
In other words, one can attach ∞6 systems of orthogonal Cartesiancoordinates to the same solid reference frame, and all are equivalent.Such coordinates are then related by transformation laws as in (1.6),with Ri
i′ and T i independent of time, and defined as spatial internalcoordinates.
The notion of time allows to examine, relative to of a given solid S,the motion of a point or that of a system of points (that is the motionof natural bodies), and hence to develop ordinary kinematics. In particu-lar, one can develop rigid kinematics, or the motion of material systemsS′ analogous to S, defining other solid frames. From this, finally, rela-tive kinematics follows, allowing to compare locally in E3 and at everyinstant, the motion of a material element with respect to two differentframes. Such a comparison is summarized by the two general laws of addi-tion of velocities (theorem of relative motions) and accelerations (Coriolistheorem).
It is clear that, from a kinematical point of view, the reference solids areall equivalent or indistinguishable; however, from a physical point of view,i.e. for the formulation of the physics laws, they can be distinguished: thismotivates the necessity of a third general axiom.
3 At least in the cases in which the molecules, due to their internal symmetry, can berepresented by their center of mass only. In absence of such internal symmetries,the scheme material point must be completed by introducing other geometricalquantities (applied vectors, tensors, etc.) which specify the internal structure.

6 1 Classical Physics: Axiomatic Formulation
C. Existence of a preferred rigid frame, S∗
To this preferred rigid frame, all the physics laws are directly sub-ordered. S∗, which must be still operationally determined, will be iden-tified with the fixed stars in mechanics, and with the cosmic Ether inelectromagnetism.
1.3 Axioms of Newtonian Mechanics
To the primary notions of absolute space and time, Newtonian mechanics addsthe notions, also absolute (i.e. independent of the reference frame), of mass andforce. The mass is a constitutive property of matter, a scalar quantity denotedby m; the force is the result of the physical action on a test (pointlike) body,due to the presence of other natural bodies or possibly to direct connectionwith them; an effect which can be schematized with an applied vector f .
The fundamental axioms are only two:
1. The law of motion (ma = f , m > 0);2. The principle of action and reaction.
Their validity is limited only to the preferred frame S∗; this should also bestressed because, differently from m and f , the acceleration a has not an abso-lute character but depends on the chosen reference frame for its measurement.
From axiom 1 for the special case of a free material point (f = 0) followsthe law of inertia, which constrains, from the physical point of view, eitherthe special frame S∗ or the absolute scale of times. Let us consider, in fact,particles in inertial motion in empty space, i.e. far enough from other materialbodies, in order to not feel any physical influence by them. In S∗, they describelinear trajectories with a uniform velocity or they are at rest; and this cannotbe valid in any frame, or for any time scale.
However, independently of the Newtonian formulation, which starts fromthe two static notions of mass and force, classical mechanics can be structuredby a set of axioms (see [3], pp. 192–196), which can all be expressed in termsof the acceleration with respect to S∗ only. They allow the introduction of the(dynamical) notion of mass and hence that of force, namely
f = ma . (1.10)
Definition (1.10) then becomes the LEX II, as soon as the force law, i.e.the dependence of the force on its effective parameters, is specified. In allthose problems which can be framed in the scheme of the “material point”(restricted problems), the force law is necessarily of the kind
f = f(P,v, t) . (1.11)
The force law is assumed not to be related to the choice of the referenceframe (principle of force law invariance), and hence it must be expressible in

1.3 Axioms of Newtonian Mechanics 7
terms of absolute parameters (like the distance r = |PQ| of moving pointsor its temporal derivative r), as it is in the case of the law of Newtoniangravitation.
The introduced axioms allow to develop the dynamics of the materialpoint (free or constrained) relative to the frame S∗, and then that of thematerial systems, either with a finite number of degrees of freedom or contin-uous systems. Thereafter, the formulation is extended to any solid referenceframe, using the Coriolis theorem. In such an extension, which implies theoccurrence of apparent forces, a fact appears which is directly related to theexpression of the general postulates of the theory, in terms of acceleration:namely, the acceleration of a point is invariant, passing from a fixed referenceframe S to any other in linear uniform motion with respect to S: a = a′. Thus,Newtonian mechanics satisfies an invariantive and fundamental property: thepreferred frame S∗ can be replaced by any other reference frame in linearuniform motion with respect to it.
In other words, classical mechanics not only admits a single preferred framebut also the whole set {Sg} of the∞3 equivalent frames: the Galilean or iner-tial frames, characterized by the law of inertia only (see [4] p. 157). Newtonianmechanics is thus governed by the Galilean principle of relativity: the (differ-ential) laws of the motion are the same in every Galilean frame.
Let us consider now two Galilean frames, Sg and S′g. The Galilean general
transformation law is the change of coordinates associated with the two triadsT and T ′, arbitrarily chosen as concerns position and orientation in Sg andS′
g, respectively. These transformations are of the same type as in (1.6), withRi
i′ constant and T i a linear function of t (in fact the T i are the coordinatesof the origin O′ of the triad T ′, which undergoes a linear uniform motion withrespect to T ).
Including the time dependence, one then finds the Galilei group G10:
xi = Rii′x
i′ + uit+ si , t = at′ + b (i = 1, 2, 3) . (1.12)
If the two triads T and T ′, in the corresponding solids, are chosen so that
i) they are superposed at t = 0: Rii′ = δi
i′ and si = 0;ii) the x1- and x1′
- axes have the same orientation of the relative velocity ofS′
g with respect to Sg: u = uc1 = uc1′ ,
then they are said to be in x1-standard relation. In this case, (1.12) reduceto the Galilei spatial transformation laws:
x1 = x1′+ ut , x2,3 = x2′,3′
. (1.13)
Clearly, the Galilean principle of relativity can also be expressed in thefollowing way: the differential laws of mechanics are formally invariant withrespect to the transformations (1.12), or, in more physical terms, no mechanicalexperiment, performed in a given Galilean frame, can show the motion of thisframe with respect to another Galilean frame.

8 1 Classical Physics: Axiomatic Formulation
Let us stress that the Galilean principle of relativity (GPR), as we havealready seen, depends on the absolute character of the acceleration and thedynamical definition of mass and force. Thus, once it is assumed that the forcef maintains its absolute meaning (principle of force law invariance),
f i(x, x, t) ci = f i′(x′, x′, t) ci′ , ∀ Galilean transf. (1.14)
the GPR appears no longer as a postulate, but as a theorem. Its logical rolewill be different in relativity theory, where such a principle is assumed a priorito be valid, in an extended form, for all the physics.
1.4 Axioms of Maxwell’s Electromagnetism
As in the case of classical mechanics, electromagnetism introduces properprimary quantities. They are the electric charge e, the electric field E andthe magnetic field H. Starting from these essential quantities, one obtains,by definition, the derived quantities, like the charge density ρ def= de
dC , i.e. the
charge contained in the element dC of volume and the current density J def= ρv.The axioms of the theory are two: first of all, Maxwell’s equations
⎧⎪⎨⎪⎩
div H = 0 , curlE +1c∂tH = 0 ,
div E = 4πρ , curlH− 1c∂tE =
4πc
J ,(1.15)
which specify the (differential) relations between the electromagnetic field andthe continuous distribution of charges and currents that generate it.4
Equation (1.15) form a partial derivatives system, with eight scalar equa-tions (four of which are homogeneous); it is linear in the components of Eor H, and c is a universal constant, with the dimensions of a velocity. Theseequations, valid in S∗, are of said of Eulerian type because the coordinatesinvolved are the t, xi internal to S∗.
Another axiom concerns the mechanical action F on a test charge e(Lorentz force), namely:
F = e
(E +
1cv ×H
), (1.16)
where v is the velocity of the charge in S∗. This action is proportional to thecharge; in the special case of particle at rest (v = 0), it is also proportionalto the electric field F = eE.
However, as stated above, in any physical theory, the choice of the axiomsis the synthesis of experimental results and, from this point of view, Maxwell’s4 System (1.15) is the so-called Heaviside form of Maxwell’s equations, in the Gauss
unrationalized system of units.

1.4 Axioms of Maxwell’s Electromagnetism 9
equations do not constitute an exception. They are a summary of many previ-ous experiments, which besides the formalization of electromagnetism, helpedin foreseeing future developments of the theory. One of the most significantamong such experiments (Oersted) gave the value of the universal constant c,by the invariant relation:
IΣM
= inv. = c , (1.17)
where M is the dipole moment of a circular current loop, of area Σ, and I isthe intensity of the current in the loop. The value of c obtained in this way,namely c � 3, 00, 000 km/s, was practically coincident with that of the lightvelocity in vacuum, as coming from different experiments.
From (1.15), some general consequences follow.(i) From (1.15)4, taking the divergence of both sides, and using the identity
div curl = 0, as well as (1.15)3, the charge conservation equation follows:
∂tρ+ div (ρv) = 0 . (1.18)
Equation (1.18) expresses, in Eulerian form, the condition that, in the evolu-tion of the charged continuum in S∗, each region C ∈ C maintains its charge,a property similar to the mass conservation law; it can be written as
ddt
∫Cρ dC = 0 ∼
∫Cρ dC =
∫C′ρ′dC′ . (1.19)
(ii) In the regions where there are no charges (ρ = 0) and currents (J = 0),the electromagnetic field satisfies the relations:
⎧⎨⎩
div H = 0 , curlE + 1c∂tH = 0 ,
div E = 0 , curlH− 1c∂tE = 0 .
(1.20)
Differentiating (1.20)2 with respect to time, one gets
curl∂tE +1c∂ttH = 0 , (1.21)
so that, using (1.20)4,
curl curlH = − 1c2∂ttH ; (1.22)
similarly, from (1.20)2,4 one gets
curl curlE = −1c∂tcurlH = − 1
c2∂ttE . (1.23)
Furthermore, from the identity, valid for any vector field v5:5 The curl of a vector field v can be expressed as

10 1 Classical Physics: Axiomatic Formulation
curl curlv = grad(div v)−Δ2v , (1.24)
and using (1.20)1,3, the preceding relations (1.22) and (1.23) become
�H ≡ Δ2H−1c2∂ttH = 0 , �E ≡ Δ2E−
1c2∂ttE = 0 ; (1.25)
that is, in vacuum, E and H both satisfy the d’Alembert equation. It followsthat c has a third important meaning. In fact, in analogy with elasticity the-ory (e.g. the one-dimensional case of a vibrating string), one gets for c themeaning of propagation velocity (in vacuum) of E and H; this is called anelectromagnetic wave.6
Here, as in elasticity theory, the word “wave” has the meaning of solu-tion of the field equations. Such a meaning for c suggested to Maxwell thehypothesis, later confirmed in experiments, that light could be an electromag-netic phenomenon, and this allowed him to make predictions of more generalphenomena, related to wave propagation. In fact, from (1.15) to (1.16), oneobtains the so-called physical optics, and hence, with a limiting procedure,geometrical optics.
The meaning of c becomes more clear when one studies the propagationof discontinuity waves for the Maxwell’s equations. To see this, let us assumethat, at time t = t0, a certain perturbation is introduced in a given electro-magnetic field, for instance by means of an electric discharge. This impliesthat at t = t0, one has δE, δH �= 0 in a certain region, limited by a sur-face σ0. The region initially perturbed will evolve into a moving surface σ,representing the boundary between the region affected (at that time) by theperturbation and the unperturbed space. In other words, σ is the instanta-neous wave front of the perturbation, and it is also a discontinuity surface forboth the field components and their derivatives. If the discontinuities occuronly in the maximum order of derivatives appearing in the field equations, σrepresents an ordinary discontinuity wave; otherwise it is a shock wave.
curlv = ci × ∂iv (∂i = ∂/∂xi) .
From this definition,
curl curlv = ci × ∂i(ck × ∂kv) = ci × (ck × ∂ikv)
= ck(ci · ∂ikv) − ∂ikv(ci · ck)
= ck∂k(ci · ∂iv) − δik∂ikv ,
and finallycurl curlv = grad(divv) − Δ2v .
6 In presence of electromagnetic sources one has instead
��H = −4π
ccurlJ , ��E = 4π
(grad ρ +
1
c2∂tJ
).

1.4 Axioms of Maxwell’s Electromagnetism 11
The fact is that Maxwell’s equations imply that all the ordinary discon-tinuity waves, in vacuum or with regular sources, move with velocity c (withrespect to S∗), independently of the causes generating the perturbation itself.7
In other words, if f(t, xi) = 0 is the Cartesian equation of the wave frontσ in S∗, at each point of σ the propagation velocity is always c:
∣∣∣∣ ∂tf
gradf
∣∣∣∣ = const = c . (1.26)
Equivalently, every electromagnetic wave front satisfies the (Eikonal) differ-ential equation:
δik∂if∂jf −1c2
(∂tf)2 = 0 . (1.27)
Equation (1.26) represents the simplest propagation law for a surface: constantspeed. However, as in the general case, the evolution of the wave front isuniquely determined, as soon as the initial configuration σ0 and the initialdirection of propagation are assigned: σ is parallel to σ0. In the special casein which σ0 is reduced to a single point (epicentral waves), the wave frontsare spheres with a common centre; if σ0 is a plane, one has plane waves etc.
Summarizing: the universal constant c, coming from electromagnetic con-siderations in Maxwell’s theory, assumes the meaning of propagation speedof the electromagnetic waves. From this follows the necessity of selecting apreferred reference frame in which (1.15) hold that is S∗. In any other frame,the propagation velocity would necessarily be different.
Thus, even if (1.15), as well as the differential equations for mechanics,are invariant with respect to coordinate transformations internal to S∗, theydo not satisfy the GRP. This latter consequence can be directly confirmed,using (1.12); in fact, neither Maxwell’s equations, the force law (1.16) northe propagation law (1.27) are formally invariant with respect to the Galileitransformations (1.12).
Hence there is a fundamental difference between mechanics and electro-magnetism. In the latter case, S∗ is the only preferred frame (it was calledcosmic Ether, being an imponderable medium which allowed the light propa-gation). In the case of mechanics, instead, S∗ cannot be distinguished from all∞3 equivalent frames. Assuming the validity of Maxwell’s theory in the pre-ferred frame S∗, clearly, the same theory can be extended to any other solidframe (Galilean or not, or even deformable). However, as for the case of themechanics, because of the fictitious forces, such extension requires explicitlythe characterization of the motion of S with respect to S∗.
At this point, once the laws of classical physics are accepted, one has thefundamental problem to localize the preferred frame S∗, taking into account
7 In other words, such velocity does not depend either on the kinematical status ofthe charges at the beginning of the propagation or on the propagation direction.Experimentally, this effect can be checked by looking at the process (spontaneousor not) of photon emission, by collision of relativistic particles.

12 1 Classical Physics: Axiomatic Formulation
that this should be conditioned only by Maxwell’s equations, so that it cannotbe physically localized by means of mechanical experiments, but only throughelectromagnetic experiments. Such a localization was specifically sought forby the classical experiment of Michelson and Morley (1887), as we will see inthe next section.
1.5 Optical Experiments and Classical Physics
In this section, we briefly review also few optical experiments which lead tothe idea that the cosmic Ether should be identified with the fixed star space(see also [4]).
Astronomical Aberration
If two different observers, in relative motion along a line r, measure the in-clination with respect to r of the light emitted by a fixed star A, the twomeasurements θ and θ′ are slightly different and depend on the star position.It follows that by observing the same phenomenon after 6 months (to makethe effect bigger), the same part of the sky appears to be deformed.
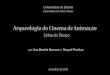
Such a phenomenon was found by J. Bradley in 1728. He observed thatthe stars, as seen from the Earth, seem to describe on the sky, in 1 year, asmall ellipse, with the semimajor axis a = 20′′, 47 of the ellipse parallel tothe ecliptic, and the semiminor axis b = a sin λ, where λ is the latitude ofthe star. He called this effect aberration, as if it were a sort of optical illusion,related to the motion of the Earth around the Sun. Classical mechanics allowsthe explanation of the effect, by using the addition of velocities law. In fact, letus assume that, in the reference frame S∗, both the star A and the observer Oare at rest; let c be the (absolute) velocity of the light ray, as emitted from A,so that, for the observer O, the direction of the ray is OA. For the observer O′,in motion with relative velocity u with respect to O, the apparent directionof the light ray is that of the relative velocity c′, given by the law of additionof velocities:
c′ = c− u . (1.28)
Thus, from Fig. 1.1, we find the relation
sin(Δθ)sin(π − θ′) =
u
c,
from which the approximate formula (to first order in Δθ) holds:
Δθ =u
csin θ . (1.29)
Classical mechanics shows, thus, a theoretical effect depending on θ, i.e.on the position of the star, which is of the first order in the ratio u/c. In

1.5 Optical Experiments and Classical Physics 13
A
A'
Apparent direction
True direction
O O 'θ
Δ θ ≡ θ ′ – θ
θ 'u
cc'
r
Fig. 1.1. Astronomical aberration
particular, let O′ be an observer on the Earth, and hence in (approximately)uniform linear motion with respect to S∗: u � 30 km/s, the orbital velocity ofthe Earth. With this choice of u, the experimental data are in agreement with(1.29) and with the identification of the cosmic Ether with the space of fixedstars. However, the interpretation of the such a formula is limited because ofthe existence of big experimental errors.
Luminal Doppler Effect
A second experiment, which confirms the identification of the cosmic Etherwith the space of the fixed stars, is a simple application of the Doppler effect.Let us recall here the classical relation which gives the frequency variationlaw of a monochromatic plane light wave when the observer is in motion withrespect to the source. If the observer and the source are both at rest withrespect to the Ether S∗, one has
ν =c
λ,
where ν is the frequency and λ the wavelength. For an observer S′, in motionwith respect to the Ether with (constant) velocity u, parallel to the propa-gation direction of the wave front n (n · n = 1), the situation is different.Assuming, for instance, that the observer S′ moves away from the source, thewave relative velocity will be c− u, and it will contain a number (c− u)/λ ofwaves. Hence, with respect to S′, the wave frequency will be
ν′ =c− uλ
= ν(1− u
c
),
orν′ = ν
(1− u · n
c
), (1.30)

14 1 Classical Physics: Axiomatic Formulation
where u · n = u. Actually (1.30) is also valid when u is not parallel to n andrepresents the frequency variation law of a light wave, passing from the Etherto a frame S′ moving with respect to the Ether with a constant arbitraryvelocity u.
In an equivalent form, defining Δν = ν′ − ν, one has (luminal Dopplereffect)
Δνν
= −u · nc
. (1.31)
From this relation, one finds that, at a classical level, a transversal Dopplereffect does not exists: u·n = 0 → ν′ = ν. The maximum effect is longitudinal,and it is of the first order in the ratio u/c, as for the stellar aberration.
Let us note that in (1.30), together with the absolute notion of time, alsothe wave length λ (distance between two successive crests) has been consideredas invariant, passing from the Ether to S′, in accordance with the classicalinvariance of space distances. Now one faces with the problem of how it ispossible to operationally control (1.31), without performing measurements inthe Ether, which is still to be localized.
Let us assume once again that the Ether will coincide with the space of thefixed stars, and let us consider, as a source, a star in the ecliptical plane. LetS′ be the frame of the Earth and assume we perform frequency measurementsat a temporal difference of 6 months. Together with (1.30), one will also have
ν′′ = ν(1 +
u
c
),
where u is the speed associated to Earth orbital motion (u = 30km/s). Thus,we have
ν′ + ν′′ = 2ν , ν′ − ν′′ = −2u
cν ,
and (1.31) reduces toν′ − ν′′ν′ + ν′′
= −uc. (1.32)
Equation (1.32) solves our problem because both ν′ and ν′′ are observable. Ifthe Ether coincides with the fixed star space, one has to find agreement withthe experimental data, assuming u = 30km/s. This is exactly what happens,independent of the chosen source and within the experimental errors.
Fresnel–Fizeau Effect
An experiment, not so simple in its interpretation, if compared with the pre-vious two, has been done by Fizeau in 1851, to verify an effect of light prop-agation in a moving medium foreseen by Fresnel in 1818.
In a transparent, homogeneous and isotropic medium, at rest with respectto the Ether, it is known that the speed of light becomes

1.5 Optical Experiments and Classical Physics 15
v0 =c
n< c , (1.33)
where n > 1 characterizes the medium and is called its refraction index. Whathappens if the medium S′, where the light propagates, is in uniform transla-tional motion with respect to the Ether? Figure 1.2 shows the experimentaldevice created by Fizeau to answer this question. A half-silvered plate, placedin A, divides the light ray coming from the source S. The rays follow the rect-angular path ABCD, by means of proper mirrors, having an inclination of 450,and then reach O, where a screen is placed to show interference fringes. Alongtheir path, the rays pass trough two transparent tubes (arranged longitudi-nally along AD and BC, respectively), in which a homogeneous and isotropicliquid (water for instance) flows with constant velocity, but in opposite direc-tion in the two tubes.
When the liquid is at rest in the two tubes, in O there are no interferencefringes. These appear instead when the liquid is moving, and the fringe’samplitude varies with the fluid velocity u.
Hence, the light velocity is modified by the motion of the transparentmedium, either by means of its speed u or by its orientation because thisaffects differently the two rays, depending on whether the motions in thetubes agree or not.
To see this in detail, let us denote by v(u) the light speed in the tube (withrespect to the laboratory), as a function of the speed of the liquid u, in thecase in which the two motions agree. If l is the common length of the tubes,the temporal phase-displacement of the two rays Δt (due to the fact that theray in motion in opposite direction with respect to fluid in the tube will takea longer time to reach O) is given by
Δt =2l
v(−u)− 2lv(u)
. (1.34)
A
Du
C
O
B
S.
Fig. 1.2. The Fresnel–Fizeau apparatus

16 1 Classical Physics: Axiomatic Formulation
Moreover, a first-order Mac-Laurin expansion of the function v(u) gives
v(u) � v0 + ku , k =(
dvdu
)u=0
; (1.35)
thus, (1.33) becomes
Δt =4lku
v20 − k2u2
=4lku
c2(
1n2− k2u
2
c2
) ,
where the expression (1.34) for v0 has been used. At the considered first orderin u/c, we have
Δt =1c2
4lkn2u . (1.36)
Obviously, the temporal displacement Δt depends on the parameters l, n, u,which must be considered as fixed in the course of an experiment, and on thecoefficient k, which uniquely determines the position of the fringes. Fizeaufound that (1.36) was in agreement with the experimental data if k (assumedto be depending on the used liquid, i.e. on n) was given the form:
k = 1− 1n2
. (1.37)
From this and from (1.33) and (1.35), the approximated expression for v(u) is
v(u) = v0 +(
1− v20
c2
)u . (1.38)
We will see (1.38) again in the next chapter, as a direct consequence of therelativistic addition of velocities theorem. However, in what is stated above,there exists an incongruence. Equation (1.36) has been deduced relative to aframe at rest with respect to the Ether (in fact this is the condition of theobserver O and the experimental device, except for the water), and in thesame frame, one must give an interpretation to (1.38). Vice versa, (1.38) hasbeen obtained by using (1.37), and comparing (1.36) with the experimentaldata corresponding to a terrestrial laboratory. Thus, the procedure is notconsistent. The incongruence can be avoided, by repeating the calculation ofΔt in an Earth laboratory. In doing so, the new value of Δt will be differentfrom what gives (1.36), either for terms of higher order in u/c or because of thepresence of the velocity of the laboratory with respect to the Ether. Therefore,(1.36) is still valid in an Earth laboratory, if it is in slow motion with respectto the Ether; thus, comparing with experimental data, the validity of (1.38)follows too.
On the contrary, one can also assume that the empirical formula (1.38),which holds to the first order in an Earth laboratory, is still valid to first orderalso in a laboratory at rest in the Ether. In any case, the value (1.37) of the

1.5 Optical Experiments and Classical Physics 17
coefficient k, obtained experimentally assuming the validity of (1.36), cannot,on the basis of a pure logical argumentation, be considered the (experimental)proof of the same (1.36) and, hence, as a proof of the slow motion of the Earthwith respect to the Ether.
Fortunately, the theory of electromagnetism helps. In fact, (1.38) canbe proved by using Maxwell’s equations, for a dielectric nonmagnetizablemedium, in slow motion with respect to the Ether. From these equations,one finds exactly the value (1.38) proposed by Fresnel and Fizeau, for thepropagation velocity of a plane wave.
Alternatively, the same value can be obtained, assuming that a primarywave moving in the Ether with velocity c, because of electric polarization phe-nomena, creates dipoles which become, in turn, centres of secondary sphericalwaves (Huygens theorem). The electromagnetic field, resulting from the super-position of the two kinds of waves, is equivalent to a single wave, propagatingwith the velocity (1.38).
In conclusion, the Fresnel–Fizeau effect confirms that the Earth is movingslowly with respect to the Ether, but its speed through the Ether is certainlydifferent from the value 30 km/s of the Earth velocity with respect to the fixedstars. Hence, the Ether cannot be considered at rest with respect to the fixedstars.
The Michelson–Morley Experiment
If the Ether were not at rest with respect to the Earth, as follows from theoptical experiments described above, the velocity of light with respect to theEarth—because of the addition of velocities—should be different, in differentdirections and in different seasons. To demonstrate this light anisotropy onthe Earth, Michelson and Morley in 1887 performed the following experiment,which was improved and repeated later, always with a negative result.
The apparatus, assumed to be at rest with respect to the Earth (lab-oratory), is shown in Fig. 1.3. A ray of monochromatic light arrives on ahalf-silvered plate L, placed at 45◦. Out come two rays, which follow differentpaths, for going and coming back, by means of the mirrors S1 and S2, andwhich are combined on a screen O, to show inference fringes. One of the twopaths is in the direction of the velocity u of the Earth with respect to theEther, and the other has the perpendicular direction. Let T1 and T2 denotethe flight times of the two rays. For the first ray, we have
T1 =l1
c− u +l1
c+ u= 2
l1c
c2 − u2= 2
l1
c
(1− u2
c2
) . (1.39)
For the second ray, instead, if c′ denotes its velocity with respect to the Earth,we have
c = u + c′ ;

18 1 Classical Physics: Axiomatic Formulation
O
L
u
S
S2
l2
l1S1
Fig. 1.3. The Michelson–Morley apparatus
from this, as the trajectory is orthogonal to u, the value of c′ follows:
c′ =√c2 − u2 .
Therefore, the time used by the second ray is given by
T2 =2l2c′
= 2l2
c√
1− u2/c2. (1.40)
The phase-displacement between the two rays, according to classicalphysics, is then
ΔT = T2 − T1 =2
c√
1− β2
(l2 −
l1√1− β2
), β = u/c ,
and it is generically nonzero, except for special length of the two arms andspecial values of u. This implies the existence of interference fringes, actuallyobserved by O.
Let us now rotate the whole apparatus by 90◦, so that the two arms, andhence the two paths, are exchanged. The phase-displacement then becomes
ΔT ′ =2
c√
1− β2
(l1 −
l2√1− β2
),
differing from the previous one, also in its sign. In fact, assuming ΔT > 0, i.e.l2 > l1/
√1− β2, we get ΔT ′ < 0, because
l2√1− β2
>l1
1− β2> l1 ;

1.5 Optical Experiments and Classical Physics 19
analogously, when ΔT < 0. Finally, one has
Δ = ΔT + ΔT ′ =2(l1 + l2)c√
1− β2
(1− 1√
1− β2
),
or
Δ =2(l1 + l2)c(1 − β2)
(√1− β2 − 1
)< 0 . (1.41)
Assuming β � 1, we have the approximate result
Δ � − l1 + l2c
u2
c2�= 0 . (1.42)
The theoretical condition Δ �= 0 implies, after exchanging of the two arms, adisplacement of fringes. However, the effect of the second order in u/c couldnot be seen experimentally, in spite of the precision accuracy of the experi-mental device, in the different periods of the year and the different ways inwhich the experiment was performed. Systematically, the rotation of the twoarms (even when the platform was placed on a mercury liquid basis) did notshow any variation of fringes: Δ = 0.
Within classical physics, assuming c �=∞, the experimental result admit-ted the only possible interpretation u = 0, i.e. Ether at rest with respect tothe Earth, in contradiction to the optical experiments described above.
A subsequent hypothesis due to the same Michelson, and then also toStokes, according to which the Ether was dragged by the Earth, in the vicinityof its surface, was abandoned because no fringes were observed repeating theexperiments at mountain level. The Lorentz–Fitzgerald hypothesis of lengthcontraction for moving bodies with respect to the Ether was then introduced(in fact, it implies |ΔT | = |ΔT ′| and hence Δ = 0, if one supposes that thelength of the arm displaced along the velocity of the Earth with respect tothe Ether was not l, but l
√1− β2, differently from the orthogonal one).
According to an epistemological point of view, widely accepted today (fal-libilism) and not by chance developed, in consequence of the scientific fact weare briefly dealing with, one should suppose that it is not possible to provethe truth of a theory, but only the falsity. Therefore, one should conclude thaton the basis of the negative result of the Michelson and Morley experiment,all the classical physics should be put in crisis. Because of the impossibilityto solve the problem of localizing the Ether (apart from the use of an ad hochypothesis), following the logic, one arrived to deny its physical existence as aunique privileged frame. A trace of this way of reasoning can be found alreadyin Poincare, earlier than in the celebrated essay of Einstein in 1905.
It was immediately clear that the Ether problem should be related to thedifference between classical mechanics and electromagnetism, the first admit-ting an infinity of preferred frames and the second only a single one. Such adifference, in agreement with the idea of a unified physics, was suggested by

20 1 Classical Physics: Axiomatic Formulation
the effective mixing of natural phenomena and in particular, by the impossibil-ity of separating such related phenomena, like mechanical and electromagneticones (see e.g. the particle theory of light).
This demand for unification required, first of all, the extension of the GRPalso to the electromagnetic phenomena, and from this point of view, it wasthe same Einstein to understand concretely this fundamental necessity andto be aware that it had to imply the invariance of the light velocity (throughthe formal invariance contained in Maxwell’s equations), hence to think of afundamental revision of the notions of space and time, i.e. the only notionsreally common to all the physical phenomena. With his words, in the 1905essay [4]: “We will raise this conjecture (the purport of which will hereafterbe called the “Principle of Relativity”) to the status of a postulate, and alsointroduce another postulate, which is only apparently irreconcilable with theformer, namely, that light is always propagated in empty space with a definitevelocity c which is independent of the state of motion of the emitting body...”Einstein was creating the axiomatic body of the new physics: special relativity.
References
1. A. Einstein, Zur elektrodynamik bewegter korper, Ann. Physik, 17, 891 (1905). 22. I. Newton, The Principia. Mathematical principles of natural philosophy, A new
translation by I.B. Cohen and A. Whitman, University of California Press, Berke-ley, CA, (1999). 4
3. G. Ferrarese, Lezioni di meccanica razionale, Vol. I, Ed. Pitagora, Bologna (1980).6
4. C. Cattaneo, Appunti di meccanica relativistica, Ed. La Goliardica, Roma (1973).7, 12, 20

2
Space-Time Geometry and RelativisticKinematics
2.1 Introduction to Special Relativity
In the history of physics, Einstein occupies a position analogous, in certainrespects, to that of Galilei, so big being the revolution they both determinedin the scientific thought. Galilei, after 2000 years, eliminates the Aristotelianideas on the dynamics (force directly related to velocity) with the help of thewell-established methods of experimental control of a theory, and introducesthe foundation of classical mechanics; Einstein, on the other hand, on thebasis of the recent progress of particle physics, eliminates the distinct notionsof space and time and introduces the new relativistic mechanics. In Einstein’sideas, there exist two “corner stones”, on which special relativity formulationis based:
i) Extended relativity principle, made up by two parts because it posits(a) the existence, in Nature, of a class of ∞3 preferred solid frames Sg,inertial or Galilean frames, just as in classical mechanics; (b) the formalinvariance, with respect to these frames, of all the physics laws and notonly of those of mechanics.
ii) Light speed axiom, according to which the light speed, in vacuum, hasthe same value c in all the Galilean frames, irrespective of the emissionproperties of the source. This axiom is clearly related to the validity ofMaxwell’s equations, which are considered the general laws of electro-magnetism. According to point (i), these are formally invariant in all theinertial frames. In turn, such a validity, extended from the Ether to allthe Galilean frames, implies two facts. On one side, it gives to the abso-lute quantities of classical electromagnetism (e.g. ρ, E and H) a relativemeaning, and, hence, creates the problem to specify their transformationlaws, passing from one frame to another; on the other side, it marks theappearance of a universal constant: the light speed in vacuum, which con-strains the new mechanics to admit a velocity (i.e. c) which has to be thesame in each Galilean frame:
G. Ferrarese and D. Bini: Space-Time Geometry and Relativistic Kinematics, Lect. Notes
Phys. 727, 21–107 (2008)
DOI 10.1007/978-3-540-73168-9 2 c© Springer-Verlag Berlin Heidelberg 2008

22 2 Space-Time Geometry and Relativistic Kinematics
c =
⎧⎪⎪⎨⎪⎪⎩
dsdt
in Sg
ds′
dt′in S′
g,
(2.1)
for any light signal in vacuum.In the classical situation dt = dt′, (2.1) is not compatible with the ad-
dition of velocity law (a linear and uniform motion, with velocity c withrespect to Sg, appears linear and uniform in S′
g too, but with velocityc′ = c − u, where u is the relative velocity of S′
g with respect to Sg). Inparticular, it follows that in any frame, there is a different value of thelight velocity, according to its direction (optical anisotropy). Hence, it isnecessary to assume dt �= dt′ together with ds �= ds′: the validity of (2.1)implies the necessity to renounce not only a universal time but also theidea of an absolute space. From here it follows Einstein’s criticism of thetraditional idea of an absolute time, which he rightly considers a conven-tional quantity, without any operational meaning. But up to what pointis it correct to speak about simultaneity, in terms of absolute quantities?Within a given Galilean frame Sg, an operational criterion, to establish iftwo events, E and F , occurring at two different points A and B, are simul-taneous, is the following. Let us assume that the light speed be the same,in each direction (optical isotropy), and let us imagine that when the twoevents occur, two light signals were emitted from A and B, respectively. Ifthese were simultaneously recoiled on a screen placed in the middle pointof AB, M, then the two events can be considered as simultaneous. Other-wise, their arrival order will specify the corresponding temporal sequence.This criterion allows us to operationally synchronize the∞3 (one for eachspace point) standard clocks of a given Galilean frame. But, is it possi-ble to transport—as classical mechanics does—the notions of simultaneityand arrival order, from one inertial frame to another? The answer is no.In fact, let us consider, together with Sg, another Galilean frame S′
g, inlinear uniform translational motion with respect to Sg, with velocity u.
Let us suppose that the events E and F be simultaneous in Sg, occurringat A and B at the time t = 0. Let then A′ and B′ be the points of S′
g
superposed, at t = 0, to the points A and B, and M′ be the mid-point ofA′B′. Initially (i.e. at t = 0), M′ (in S′
g) coincides with M (in Sg); however,repeating the previous experiment, because of the motion of M′, the rayemanating from B≡ B′ will meet M′ before the one coming from A≡ A′.Hence, to the observer M′, the switching a light in B will seem to arrivebefore that the one coming from A: this is the relativity of simultaneity orthe fact that two events, simultaneous in one frame, are not simultaneousin another Galilean frame.
The situation would have been different if the light speed were infi-nite: in fact, classical mechanics and its notion of absolute time are both

2.2 General Axioms 23
consistent with c = ∞; in spite of the fact that from 1675 (Romer), thefinite value of the light speed was known.
However, assuming the existence of a class of ∞3 preferred frames, ineach of these frames, one can still introduce a universal time t, but thist is, a priori, independent of the time t′ of another frame: t′ �= at +b. Furthermore, according to Einstein, not only the time but also thelengths have a relative meaning; that is, the ordinary distance betweentwo points, in the same Galilean solid, is not invariant: two events that, ina given Galilean frame occur at distinct points, in another Galilean framemay occur at the same point, and vice versa. In other words, even if allthe Galilean solids, assumed to be equivalent, have the same geometricstructure (strictly Euclidean), they are no more superposed to the samethree-dimensional space E3, as it is the case for the classical physics.For example, the condition of uniform translational motion (for rods orclocks) in a given Sg determines a variation for lengths and times, due tothe relative nature of spatial and temporal measurements, and not to adeformation of clocks and rods.
2.2 General Axioms
Let us summarize the general axioms of Einstein physics.
A. Existence of an absolute space-timeThis axiom implies that the only primary quantity is the event E, or“elementary phenomenon”. The set of all the events {E} form the universein its becoming, and this is the four-dimensional unification of space andtime in a unique absolute: the space-time.
It is implicitly assumed in A that all the physical reality can be rep-resented in terms of the geometrical objects of the space-time (points,curves, hypersurfaces, 4-vectors, etc.). In particular, the Galilean or in-ertial solid frames can be considered (in a new form, as will be specifiedin the next postulate) and identified as solids in uniform translationalmotion with respect to the fixed stars.
B. Existence of Galilean framesIn the space-time, it is possible to identify a class of ∞3 preferred frames(the Galilean frames), each of them characterized by a three-dimensionalspace, Σ, endowed with a universal time t and with all the ordinary prop-erties; that is the spatial isotropy, the spatial and temporal homogeneity,the validity, in Σ, of the strict Euclidean geometry, and the completeness,in the sense that, in each Sg, all the various phenomena can be coordi-nated (in a relative form). In other words, the generic event E appears, inSg, as occurring at a certain point P of the solid, and at a certain instantt. Thus, once one has selected a Cartesian triad T in Σ, E is representedby a numerical quadruple (t, xi) (i = 1, 2, 3): the space-time coordinates

24 2 Space-Time Geometry and Relativistic Kinematics
of the event E. In another Galilean frame, S′g, the same event E will be
associated with another point P′ ∈ S′g and by an instant t′ of the tempo-
ral scale associated with S′g; hence, it will be represented by a numerical
quadruple (t′, xi′), different from the previous one but determined by this(Lorentz transformations).
However, together with t �= at′ + b, one will also have xi �= Rii′x
i′ +uit + si because, as stated above, the Galilean solids Sg and S′
g are notsuperposed to a common E3, as is the case classically.
In any case, because of the completeness of the physical description inSg, the history of S′
g can be followed in Sg too, even if only in relativeterms; that is, the particles of S′
g will appear in uniform translationalmotion. Thus, even with the unique new absolute: the space-time, theordinary notions of space and time are not eliminated, in the Einsteinianconception, because these are the fundamental terms of our experience;they, clearly, can be found in the Galilean frames, but with a relativemeaning. The experimental physicist, operating in a Galilean frame Sg
(laboratory), does his measurements in terms of lengths and time intervals,knowing that the values he can find, in the study of a given phenomenon,will be different from those found by another observer, at rest in anotherGalilean frame. The additional fact is that, not only the measurements butalso the properties that one measures, have, a priori, a relative meaning(velocity, acceleration, mass, charge, electric and magnetic fields, etc.).Hence is the necessity to know the transformation laws of these quantities,passing from one to another Galilean frame. In turns, this requires the linkof the relative quantities to the absolute quantities, from which they comeand can be seen as a renaissance of the platonic philosophy: the worldshows itself by means of shadows, the only things accessible by men; evenif these are coherent shadows, with an objective content, as emanatingfrom the “absolute”.
However, the physicist especially looks for the fundamental relationsbetween observables; that is, for the physical laws, which, because of theiruniversal character, must satisfy invariance requirements. More precisely,in spite of the relativity of the geometric terms used to formulate physicslaws in Sg, the following axiom holds.
C. Extended relativity principle (ERP)All the physics laws are formally invariant, passing from one referenceframe Sg to another S′
g. That is, no physical experiment may allow to dis-tinguish between Sg and S′
g. This is an extension of the classical Galileanrelativity principle due to the extension of the absolute space and absolutetime axioms. However, the invariance is only formal, in the sense that allthe ingredients entering the formulation of the physics laws have a rela-tive meaning. The problem of studying their transformation laws is thennaturally posed.

2.3 The Minkowski Space-time 25
In any case, special relativity substitutes the existence of a universalconstant for the indetermination of the physical space and the time, that is
D. Independence of the emission for the light speed in vacuumIn each Sg, the light speed in vacuum does not depend on the sourcemotion, and it has the same value in each direction. Because of the ERP,such a speed cannot depend on the chosen Galilean frame Sg, and it shouldhave the value c which it takes in the rest frame of the source: cg = c′g = c.Let us note that the latter postulate becomes a theorem if Maxwell’sequations are accepted as laws of electromagnetism, obviously subordi-nated to the ERP; that is, every electromagnetic perturbation propagatesin vacuum with velocity c, independent of the initial disturbance.
Finally, c is a limit velocity, in the sense thatE. No material particle, in Sg, can move at (or faster than) the light speed
in vacuum
v2 < c2 for any material particle. (2.2)
This axiom, as will be elucidated in what follows, can be obtained byadding the causality principle to the preceding axioms. It is widely con-firmed, both in the macroscopic and the microscopic range, in high-energyphysics experiments. Here we prefer to assume it from the beginning.
In any case, (2.2), valid in every Sg because of the ERP, representsa nonholonomic, unilateral and quadratic constraint, which does not in-troduce in Sg horizons (i.e. limitation for the particles trajectories), butrestricts only the motion laws.
2.3 The Minkowski Space-time
The problem is now that of geometrizing the chosen axioms in order to buildup a model for the Universe: the Minkowski space M4, where the Galileanframes should be localized, the Lorentz transformation be derived, i.e. whereall the physics theories can be developed. In fact, even if the relative point ofview is allowed, and it is close to the phenomenological reality as it appears tothe observer, the absolute point of view in M4 is primary, either for developingthe general procedures or to define the various physical quantities.
In classical mechanics, the problem of finding representative spaces for ma-terial systems was considered too. As an example, for the motion of a holo-nomic system, two different formulations exist: one of geometrical–kinematicscontent (configuration space and phase space) and another of pure geometriccontent (event space, or the space of the world lines). A material point isa particular holonomic system and hence for it both the possibilities are al-lowed. However, in the relativistic framework, the second formulation shouldbe favoured, not only for its absolute content (the first has necessarily a rel-ative meaning because such is the time; similarly for the configuration space,

26 2 Space-Time Geometry and Relativistic Kinematics
which can be identified with a Galilean space) but also because it allows theconceptual vicinity between the time and the space coordinates.
There is, clearly, a fundamental difference: while in a classical context thereexist a 1 − 1 correspondence (up to a weak condition dt/dλ > 0, see below)between all the physically allowed motions and the curves, in the relativisticcase, i.e. in the event space, such a condition does not exist because of theconstraint (2.2).
To be more specific, let us consider a Galilean frame Sg referred to internal(orthogonal Cartesian) coordinates xi. From axiom D, let us denote x0 = ct,so that x0 has the dimensions of a length. Then, we can interpret xα (α =0, 1, 2, 3) as the Cartesian coordinates of a four-dimensional affine space1 E4.Such interpretation obviously requires that an affine frame be arbitrarily fixedin E4, namely an origin Ω and a basis {cα}.
The generic point E ∈ E4: ΩE = xαcα, represents an event, i.e. the specialevent that, in the considered Galilean frame, occurs at P ≡ xi at the instantt = x0/c. Analogously, a generic motion in Sg,
xi = xi(t) , t ∈ (t0, t1), (2.3)
has two characteristics: a geometric one (the relative trajectory, � ≡ P0P1)and a kinematic one (the law of motion along the trajectory s = s(t)). Theseare summarized, in E4, by an oriented curve segment �+:
xα = xα(t) ,dx0
dt= c > 0 , (2.4)
where the time of the reference frame is chosen as parameter along the curve.The latter is not a special parameter because it can be replaced by any
other parameter λ, chosen with only the condition of saving the orientationof �+:
xα = xα(λ) ,dx0
dλ> 0 ∀λ ∈ (λ0, λ1) . (2.5)
1 It is well known that an affine space E4 can be defined as a set of elements(points) in a 1 − 1 correspondence with the ordered 4-tuple of real numbersxα (α = 0, 1, 2, 3), defined up to linear and invertible transformations: xα =
Aαα′xα′
+ Aα, Aαα′ = ∂xα/∂xα′
being a regular matrix, constant as the Aα.Alternatively, E4 can be thought as a set E of elements (or points O,P,Q,...)associated with a linear space T4 such that there exists a surjective applicationα : E × E → T4 between ordered pairs of E and elements of T4, that is(O, P) → v = α(O, P) = OP, satisfying the conditions:
1. ∀O ∈ E and v ∈ T4∃!P ∈ E : OP = v;2. OP + PQ = OQ , ∀O, P, Q ∈ E (triangular relation).
Then, five-ordered points of E : Ω and Uα (the origin and the “unit points”), suchthat the vectors cα = ΩUα are linearly independent in T4 and define an affineframe.

2.3 The Minkowski Space-time 27
Thus, every pointlike motionM in Sg (xi = xi(s), s = s(t)), in the event spaceE4, is represented by a well-determined arc �+ : xα = xα(λ). In particular,
(i) to the uniform rectilinear motions in Sg: xi = const. (i = 1, 2, 3) corre-spond, in E4, straight lines xα = const., and among these
(ii) the points of the Galilean frame (at rest in Sg: xi = const.) are representedby straight lines, parallel to the x0-axis.
Conversely, an oriented arc �+ ∈ E4 does not define, in general, a physicallyallowed motion. In fact, even if λ is eliminated: x0 = x0(λ), xi = xi(λ), →xi = xi(t), the condition (2.2) should be satisfied, i.e. δikxixk − (x0)2 < 0, or,after multiplication by (dt/dλ)2 > 0:
δik
(dxi
dλ
)(dxk
dλ
)−(
dx0
dλ
)2
< 0 , λ ∈ (λ0, λ1) ,
the latter being a form invariant with respect to the choice of the parameterλ. Therefore, a necessary and sufficient condition for �+ ∈ E4 to represent aphysically possible motion in Sg, is that the following limitation:
mαβ
(dxα
dλ
)(dxβ
dλ
)< 0 ∀λ ∈ (λ0, λ1) (2.6)
be satisfied, with
mαβdef=
⎛⎜⎝−1 0 0 00 1 0 00 0 1 00 0 0 1
⎞⎟⎠ . (2.7)
The limitation (2.6) can be geometrically interpreted. To this end, let usintroduce, in E4, the scalar product associated to the symmetric matrix (2.7):
V ·W def= mαβVαW β ∀V, W ∈ E4. (2.8)
Such an operation satisfies all the ordinary scalar product properties, namely
1. commutative: V ·W = W ·V;2. bilinear: (U + V) ·W = U ·W + V ·W; (aU) ·V = a(U ·V);3. nonsingular: V ·W = 0 ∀ V → W = 0,
as it can be directly verified.As concerns the property 3, the condition mαβV
αW β = 0 ∀V α is equiv-alent to mαβW
β = 0, that is W β = 0, since the matrix mαβ is regular:det ||mαβ || = −1.
As in the ordinary case, the condition V ·W = 0 can be geometrically in-terpreted, in terms of orthogonality of the two vectors; the vectors orthogonalto V form the orthogonal hyperplane to V, etc.
The operation (2.8) gives, in particular, the meaning of the coefficientsmαβ ,identifying them as scalar products of the (affine) frame vectors:

28 2 Space-Time Geometry and Relativistic Kinematics
mαβ = cα · cβ (α, β = 0, 1, 2, 3) ; (2.9)
moreover, it associates a scalar quantity to any vector V, the norm ||V||:
||V|| = mαβVαV β , (2.10)
which is not necessarily positive; for example, ||c0|| = −1.The affine space E4, endowed with the scalar product (2.8), assumes the
structure of Euclidean space (not in a strict sense2): the Minkowski space M4.Such a space is characterized also by the distance δ(E,F ) ≥ 0 between thetwo events E and F
δ2def= |mαβ(xα
F − xαE)(xβ
F − xβE)| = |δik(xi
F − xiE)(xk
F − xkE)− (x0
F − x0E)2| ,(2.11)
built up with the relative spatial distance
Δ� =√δik(xi
F − xiE)(xj
F − xjE) , (2.12)
and the relative time interval: Δt = |tF − tE |, so that
δ2 = |Δ�2 − c2Δt2| . (2.13)
This is a geometrical model for the special relativistic absolute: the four-dimensional Minkowski space-time. First of all, its points are the events ofthe natural world; the history of all the physically allowed motions (sequenceof events in causal relation) is given by particular oriented arcs �+ or worldlines of M4. They must satisfy the condition (2.6) which, after introducingthe tangent vector λ = λαcα
λα def=dxα
dλ(α = 0, 1, 2, 3) , (2.14)
is equivalent to the condition
||λ|| = mαβλαλβ < 0 ∀λ ∈ (λ0, λ1) . (2.15)
This is a typical property of the world lines which has an intrinsic meaningand does not depend on the choice of the parameter λ. In fact, if λ = λ(λ′),then
λ = λ′ dλ′
dλ,
and hence
λ · λ = λ′ · λ′(
dλ′
dλ
)2
,
so that, from (2.15), ||λ′|| < 0.2 An Euclidean space is strictly Euclidean if one assumes instead that ∀V �= 0,
then ||V|| > 0 or ||V|| < 0.

2.4 The Minkowski Metric 29
At this point, we have considered the mathematical translation of the ax-ioms A and E. We still have to give a representation, in M4, of the Galileanframes, and also to show how M4 deals with the relativity principle. However,strengthening the structure of affine space by introducing a scalar product, thevarious geometrical quantities of M4 (points, vectors, tensors, etc.) and theirproperties should be invariant with respect to more general transformationthan those (linear and invertible) of an affine space (Lorentz transformations).
Finally, as concerns the definition of a Galilean frame Sg, we have that inM4, as in E4, its history is represented by straight lines, parallel to c0; anyof the ∞1 hyperplanes orthogonal to c0 can represent the physical space Σ,associated with Sg. Changing the Galilean frame Sg will be then equivalentto exchanging (in M4) c0 with another vector of the same kind: c′0: c′0 · c′0 =−1. The result will be that the equivalence of all the Galilean frames willcorrespond to the geometrical indistinguishability of the vectors c0 and c′0which are used to represent them.
2.4 The Minkowski Metric
It is now convenient to consider some formal aspects of Minkowski geometry,which, being improperly Euclidean, is quite different from properly Euclideangeometry. First of all, by using the fundamental products,
cα · cβ = mαβ = diag(−1, 1, 1, 1) , (2.16)
the selected affine frame is constrained being necessarily orthonormal the basis{cα}: the vectors cα have unitary magnitude (the magnitude or modulus of avector V being defined as V =
√|V ·V|), and they are mutually orthogonal.
Orthonormal bases are typical for (properly or not) Euclidean spaces. It canbe shown (see [1], p. 82) that, in any nonsingular Euclidean space, there existinfinite orthonormal bases; moreover, in the same case, the number of vectorshaving positive (or negative) norm is invariant: such integer number definesthe signature of the Euclidean space. From this point of view, the Minkowskispace M4 is an (improper) Euclidean space of signature +2, or − + ++,because all the orthonormal bases contain a vector with norm −1, and threevectors with norm +1.
With the choice (2.16), the basis {cα} is orthonormal; however, it is notunique as occurs for the ordinary space. If {cα′} is a basis of the same kind,
cα′ · cβ′ = mα′β′ = diag(−1, 1, 1, 1) (α′, β′ = 0, 1, 2, 3) , (2.17)
the transformation matrix which defines the change of the basis, Lαα′ (to
distinguish it from the generic transformation matrix Aαα′),
cα′ = Lαα′ cα , (2.18)

30 2 Space-Time Geometry and Relativistic Kinematics
should be a rotation (also said a 4-rotation), in the sense that it satisfies theproperties analogous to (2.4):
Lαα′ Lβ
β′mαβ = mα′β′ (α, β = 0, 1, 2, 3) ; (2.19)
Equation (2.19) constrains the choice of the Lαα′ (arbitrary, a priori), as was
the case for the components of a rotation matrix Rii′ in the ordinary space
Rii′ Rj
j′δij = δi′j′ (i, j = 1, 2, 3) . (2.20)
Here, the conditions obtained from (2.19) are 10 (in fact, because of the sym-metry, it is enough to assume α ≤ β) and, hence, the rotations in M4 form agroup with 16− 10 = 6 parameters.
From (2.19) we also have
(det||Lαα′ ||)2 = 1 ; (2.21)
thus, such a group contains both rotations (det||Lαα′ || = 1) and antirotations
(det||Lαα′ || = −1).
In any case, the coefficients mαβ are necessarily invariant: mαβ = mα′β′ forall possible orthonormal bases related by (2.19); they are no longer invariantif the basis {cα′} is generic: cα′ = Aα
α′ cα and, in this case, one has
mα′β′ = Aαα′ Aβ
β′mαβ �= mαβ (α, β = 0, 1, 2, 3) . (2.22)
The transformation law (2.22) characterizes, as we will see in the following,a 2-tensor: the metric tensor of M4, whose main role is that of defining, inM4, the scalar product; in other words, it defines the space-time lengths andthe angles, with an abuse of language because here a definition of the anglebetween two vectors is different from the one valid in the ordinary space.
Another property, equally important, of the metric, is that of raising orlowering of indices. More precisely, together with the matrix ||mαβ ||, given in(2.7), let us consider the inverse matrix ||mαβ || such that
mαβmβρ = δαρ ; (2.23)
in our case (orthonormal basis), one has mαβ = mαβ .By means of the reciprocal elements mαβ, one can construct the dual basis
cα of the basis cα, defined as follows:
cα = mαβcβ ∼ cα = mαβcβ , (2.24)
or, explicitly,c0 = −c0 , ci = ci (i = 1, 2, 3) . (2.25)
From (2.23) and using (2.16) the following property holds:
cα · cα = δαβ . (2.26)

2.5 Vectors and Their Classification. The Lightcone 31
With this assumption, one can decompose each vector with respect to thebasis {cα} or its dual {cα}
V = V αcα = Vαcα . (2.27)
The components V α (along cα) are termed contravariant, while the Vα (alongcα) are said to be covariant; from (2.24) follow the invertible relations:
Vα = mαβVβ ∼ V α = mαβVβ , (2.28)
or, explicitly V0 = −V 0, Vi = V i (i = 1, 2, 3). It is worth noticing the similarrole played in (2.28) by the matrices ||mαβ || and ||mαβ ||: the first is used tolower an index, the second to raise it. They also play a similar role with respectto the metric: in fact, exchanging of them is equivalent to exchanging of thebasis {cα} with its dual basis {cα}. In other words, from (2.26), one has thefollowing two representations of the metric, covariant and contravariant:
mαβ = cα · cβ , mαβ = cα · cβ ; (2.29)
in addition, there are the two symmetric relations for the components of avector:
Vα = V · cα , V α = V · cα . (2.30)
2.5 Vectors and Their Classification. The Lightcone
Let us proceed, now, with the classification of vectors in M4. We have thefollowing definitions: (1) vectors u with vanishing norm: u · u = 0, are nullvectors (or lightlike or isotropic); (2) vectors s with positive norm, s · s > 0,are spacelike vectors (like ci); (3) vectors γ with negative norm, γ ·γ < 0, aretimelike vectors (like c0).
Let us consider the whole set of null vectors, at an arbitrary point Ω ∈M4, to be chosen as the origin of the coordinates, for simplicity. Thus, thecomponents of a generic null vector u = ΩU are identified with the coordinatesxα of its end point U. When u varies within such a family, U describes ahypersurface, defined by the following homogeneous and quadratic relation:
mαβxαxβ = 0 ; (2.31)
this is a three-dimensional cone, C3: the absolute feature of M4, or the light-cone.C3 separates, as we will see later, the vectors with positive norm (external)
from those with negative norm (internal). In a properly Euclidean space, likethe ordinary one, obviously, the lightcone C3 degenerates to a single point;differently from what happens in a generic (i.e. nonproperly) Euclidean space,like M4, where a nontrivial null vector does exist.

32 2 Space-Time Geometry and Relativistic Kinematics
Let us consider, in fact, the subspace of M4 generated by the vectors λγ+μs(γ being a timelike vector, s a spacelike vector and λ, μ ∈ �). The associatednorm,
||λγ + μs|| = (λγ + μs) · (λγ + μs)= λ2 ||γ||+ 2λμγ · s + μ2||s|| ,
is a continuous function of λ and μ, in all the real plane. Once evaluated at thepoint P ≡ (λ �= 0, μ = 0), it is negative, while at the point Q ≡ (λ = 0, μ �= 0),it is positive. Thus, there exists a point R ≡ (λ, μ), internal to the segmentPQ (and hence different from Ω) such that ||λγ + μs|| = 0.
For example, if {cα} is an orthonormal basis, in the subspace E2 ≡ {λc0 +μc1}λ,μ∈�, there exist two isotropic straight lines: −λ2 + μ2 = 0 → λ = ±μ,which are defined by the two null vectors: u1,2 = c0 ± c1.
It is worth noticing that
1. u1 +u2 = 2c0 is a timelike vector; that is, the lightcone C3 is not a vectorsubspace of M4.
2. An orthonormal basis cannot contain a null vector, by definition; however,inM4, there exist bases of null vectors; for example, c0+c1, c0−c1, c0+c2,c0 + c3 are four, linearly independent, null vectors. In fact, the condition
α0(c0 + c1) + α1(c0 − c1) + α2(c0 + c2) + α3(c0 + c3) = 0
is equivalent to
(α0 + α1 + α2 + α3)c0 + (α0 − α1)c1 + α2c2 + α3c3 = 0 ,
or
α0 + α1 + α2 + α3 = 0 , α0 − α1 = 0 , α2 = 0 , α3 = 0 ,
that is αβ = 0 (β = 0, 1, 2, 3) and, hence, they form a basis in M4.3. The two null vectors u1 and u2 are not orthogonal
(c0 + c1) · (c0 − c1) = −2 .
This is a general property, that is for any two null vectors u and u′ notaligned, one has
u · u′ > 0 or u · u′ < 0 ,
the orthogonality being thus excluded.3
3 Let us assume, without loss of generality, a basis {cα} such that the null vectoru is represented by u = u(c0 +c1). If u′ is a null vector too, then u′ = ac0 + bici,with a2 = δikbibk. The scalar product with u is given by u′ · u = u(b1 − a); itfollows that u′ · u = 0 ↔ b1 = a, and hence b2 = b3 = 0, that is u′ parallel to u.

2.5 Vectors and Their Classification. The Lightcone 33
In scalar terms, for any event-origin E, the lightcone is defined by theCartesian equation (2.31), or, explicitly:
δikxixk − (x0)2 = 0 , (2.32)
which represents a circular cone. The intersection with the generic hyperplanex0 = ct, orthogonal to the x0-axis, is an ordinary sphere: δikxixk = c2t2,centred at O = (ct, 0, 0, 0) and with radius ct.4 Such a sphere can be seen as aprojection of C3 on Σ, where it represents, for each t, the wave front of a lightwave, emitted from E = Ω at t = 0. Furthermore, C3 separates the external(connected) part from the internal (not connected) one, made up by the twobranches of the cone.
Let us consider, now, the set of all the timelike vectors T ∈ M4. It can beeasily shown that,5 as for null vectors which were not aligned, two timelikevectors cannot be orthogonal; thus, for the timelike vectors γ, γ′, only thefollowing two cases are allowed:
(a) γ · γ′ > 0 , (b) γ · γ′ < 0 .
As a consequence, once γ is fixed, the product γ · γ′ = mαβγαγ′β is a
continuous function of the γ′β, that is of γ ′. If γ′ varies in a connected regionof T , because of the theorem on the zeros of continuous functions, the sign ofγ · γ′ should remain unchanged; in other words, it is not possible to have, insuch a domain, γ · γ′ > 0 and γ · γ′ < 0: this, in fact, would imply γ · γ′ = 0for a certain γ′, which is impossible. Therefore, all the vectors γ ′ such thatγ · γ′ > 0, or γ · γ′ < 0, should belong to not connected regions of T , i.e.the two (internal) branches of the lightcone. On the other hand, if γ and γ′
belong to the same branch of the lightcone, one has γ ·γ′ < 0 because γ ·γ < 0.In different words, two vectors in the internal part of a branch always havenegative product.
Assuming γ = c0 and γ ′ = γ, we have, by definition:⎧⎨⎩C+3 ≡ {γ : c0 · γ < 0} positive half-cone.
C−3 ≡ {γ : c0 · γ > 0} negative half-cone.
The terminology positive or negative, of course, has not any intrinsic meaningand is introduced only to distinguish between the branches of the lightcone4 We notice that vectors on the hyperplane have components (0, s1, s2, s3), while
vectors aligned with the x0-axis have components (γ0, 0, 0, 0).5 Otherwise, an orthonormal basis containing two timelike vectors would exist, and
the signature will be no more than +2. Moreover, the following property holdsthat a vector v orthogonal to a timelike unit (without loss of generality) vectorγ is necessarily spacelike. In fact, assuming γ = c0 and v = vαcα, it followsv · γ = −v0. Thus, the hypothesis v ⊥ γ implies v0 = 0 and hence v = vici, sothat ||v|| = δikvivk > 0. Finally, it should be noted that a timelike vector and aspacelike one need not be orthogonal. For example, this is the case for γ = c0 ands = −γ + 2c1 for which s · γ = 1.

34 2 Space-Time Geometry and Relativistic Kinematics
which form the two connected parts of T ; alternatively, the definition of thebranches does not depend on the choice of c0.
The set of all the spacelike vectors, S ≡ {s : s ·s > 0}, is instead connected;in fact, all the cases
s · s′ > 0 , s · s′ = 0 , s · s′ < 0
are possible.A picture of all the vectors in M4 is obtained by considering, in Σ, a sphere
σ centred at Ω and of unit radius, as well as all the vectors s ∈ Σ. Each scan be associated to a vector V = γ + s, which is timelike, null or spacelike,when s < 1, s = 1, s > 1, respectively. From this follows the meaning of thesphere σ, which characterizes (through γ) all the vectors of M4: internal, onthe boundary, or external to σ.
Therefore, it follows that M4 is a homogeneous Euclidean space, but it isnot isotropic even if there exist no privileged points in M4, there are, clearly,preferred directions; this is different from all the three-dimensional sectionsΣ, associated with inertial frames, which are all homogeneous and isotropic(see axiom 2 of B).
In each of the three different classes of vectors, the directions (timelike,null and spacelike) are equivalent, that is geometrically not distinguishable,in the sense that one can pass from one to another with a 4-rotation. In otherwords, 4-rotations do not change the type of vectors and leave unchanged thelightcone C3, as well as its two branches: C+
3 and C−3 .
2.6 Elements of the Geometry of Minkowski Space-time
After this discussion of the one-dimensional subspaces of M4, let us considertwo-dimensional subspaces. A two-dimensional subspace is defined by the lin-ear combinations of two independent vectors:
E2 ≡ {v : v = λv1 + μv2}λ,μ∈�,
or, briefly E2 ≡< v1,v2 >. There exist three different types:
1 Elliptic subspaces. They are formed by spacelike vectors only.For example: < c1, c2 >; in fact, for any vector v ∈< c1, c2 >, one has
(λc1 + μc2) · (λc1 + μc2) = λ2 + μ2 ≥ 0 ,
with the equality valid only for the trivial case λ = 0, μ = 0.2 Hyperbolic subspaces. They are formed by vectors of all the three kinds
and contain two null (or isotropic) directions.An example is given by < c0, c1 >, and it has already been discussed.

2.6 Elements of the Geometry of Minkowski Space-time 35
3 Parabolic subspaces. They are formed by a null direction u and by spatialvectors only, which are all orthogonal to u; in fact, if the subspace is< u,w >, one can always assume w orthogonal to u: w ·u = 0. Thus, forany vector v in the subspace, v = λu + μw, one gets
v · v = μ2w2 ≥ 0 , v · u = μw · u = 0 ,
with the equality valid only if μ = 0, or v = λu; from this follows theexistence of a null direction, with all the other directions being spacelikeand orthogonal to the null one.An example is given by < c0 + c1, c2 >, with c0 + c1 a null vector.
Intuitively, one can image a parabolic subspace as the limit of a hyperbolicone, when the two isotropic directions collapse into a single one. More pre-cisely, a hyperbolic subspace is divided, by the two isotropic straight lines, r1and r2, into four not connected parts, two of which contain timelike vectorsand the other two contain spacelike vectors; each timelike direction, in turn,admits an orthogonal spacelike direction. When r2 → r1, by varying the 2-plane containing Ω, each spacelike vector will become orthogonal to the nulldirection in which both r1 and r2 (as well as the two regions of negative normvectors) will collapse.
Finally, it is possible to geometrically classify the two-dimensional subspaces(2-planes) of M4, according to their intersections with the lightcone: theseare two real distinct straight lines, two real and coinciding straight lines, ortwo complex directions, if the subspaces are hyperbolic, parabolic or elliptic,respectively.
The same classification occurs by considering the induced metric from theMinkowskian one, in each subspace, that is the 2-metric associated with thescalar product between vectors of a basis (even not orthogonal) in the samesubspace. In fact, by a theorem on completion, every basis in a subspace isa part of a basis of M4; hence, practically, one has to consider the minorsgik (i, k = 1, 2) of the full metric. From this point of view,
(i) Elliptical and hyperbolic subspaces are regular (det ||gik|| �= 0), and withsignature ++ or −+, respectively.
(ii) Parabolic subspaces are singular (det ||gik|| = 0).
Thus, for the subspace < c1, c2 > one has
det ||gik|| = det ||ci · ck|| =∣∣∣∣ 1 00 1
∣∣∣∣ = 1 �= 0 ,
and the signature is ++; analogously, for the subspace < c0, c1 > one has
det ||gik|| =∣∣∣∣−1 0
0 1
∣∣∣∣ = −1 �= 0 ,
and the signature is −+; finally, for the subspace < c0 + c1, c2 > one has

36 2 Space-Time Geometry and Relativistic Kinematics
det ||gik|| =∣∣∣∣ 0 00 1
∣∣∣∣ = 0 ,
and the induced metric is singular.Let us consider, now, the three-dimensional linear subspaces of M4, or 3-
planes, or hyperplanes. They are spanned by three linear independent vectors,v1, v2, v3:
E3 ≡ {v : v = λv1 + μv2 + νv3}λ,μ,ν∈� ≡< v1,v2,v3 > .
From what has been stated above, it is clear that M4 will admit the follow-ing:
1) Elliptical hyperplanes (with signature + + +); they are formed by spatialvectors, apart for the vector zero.An example is given by Σ ≡< c1, c2, c3 >.
2) Hyperbolic hyperplanes (with signature −++); they are formed by vectorsof any kind, and they include a two-dimensional cone of null straight lines(see [1], p. 129).An example is given by Σ ≡< c0, c1, c2 >. Here we have
||λc0 + μc1 + νc2|| = −λ2 + μ2 + ν2 ,
from which, when λ2 = μ2 + ν2, one has ∞1 null straight lines, that is anordinary cone.
3) Parabolic hyperplanes (singular); for these, as for the parabolic 2-planes,the concept of signature is meaningless because they do not admit or-thonormal bases (such bases will necessarily contain the null vector ofthe hyperplane). Actually, they contain a null direction u and all the re-maining vectors are spacelike. Moreover, as in the two-dimensional case,all the vectors are orthogonal to the null direction itself; thus, this is thehyperplane orthogonal to u.
In other words, to any vector v ∈ M4, there corresponds, without excep-tions, an orthogonal three-dimensional subspace. This is disjoint from v (andregular: hyperbolic or elliptic) only when ||v|| �= 06; when v is null, the normalsubspace contains v and it is necessarily parabolic.
For example, the hyperplane < c0 + c1, c2, c3 > is parabolic; thus,
det ||gik|| =
∣∣∣∣∣∣0 0 00 1 00 0 1
∣∣∣∣∣∣ = 0 ;
moreover, for any vector of the hyperplane: v = λ(c0+c1)+μc2+νc3, whence
v · v = μ2 + ν2 ≥ 0 , (c0 + c1) · v = 0 , ∀λ, μ, ν .6 In any Euclidean space (proper or not), a linear subspace admits a unique sup-
plemental and orthogonal subspace which is also nonsingular (see [1], p. 82).

2.7 Proper Time 37
2.7 Proper Time
The classification of vectors in M4, and the lightcone, allows us to geometri-cally specify, first of all, the whole class of Galilean frames, and, in particular,all those frames having the same time orientation: the set of orthochronousframes. More precisely, for a generic frame, the unit timelike vector γ = c0
(and, hence, the associated congruence of equi-oriented straight lines) canbelong to either of the light half-cones. Orthochronous frames, instead, arecharacterized by vectors γ belonging to the same branch of the lightcone:
∀ γ,γ′ ∈ {γ} → γ · γ′ < 0 .
In the following, we will limit ourselves to orthochronous Galilean frames,the only ones for which the notions of present, past and future are meaningful;that is, we will assume M4 endowed with only one of the two light half-cones,say C+
3 . We will say, briefly, that M4 is time oriented, and we will use thenotation: M4(C+
3 ), or, equivalently, M+4 .
The impossibility to distinguish, from a geometrical point of view, amongthe unit vectors γ, clearly has its physical counterpart in the equivalence ofall the associated Galilean frames, as has been postulated above.
Together with the orthochronous Galilean frames (each with its properrepresentative physical space, Σ, orthogonal to γ, and hence elliptical), thelight half-cone C+
3 gives geometrical consistence to the world lines �+ ≡ E0E1.As we have already seen, they must have, at any point E, the tangent vectorcontained in C+
3 : thus, necessarily, the whole world line belongs to the half-cone C+
3 , having the vertex at E0. C+3 therefore characterizes all the events
which can be connected with E0 by means of a world line (a straight lineor a curve): it is the future of E0, or the geometrical horizon. The latter, asalready stated, gives no rise to any physical horizon. In fact, if the event E0 ischaracterized in Sg by the pair (P0, t0), all that happens at P0, at the instantt0, may influence what happens at each P ∈ Sg. In particular, a particleemitted suitably at P0 can reach any P ∈ Sg.
Each world line can be parametrized by an intrinsic parameter τ , analogous(apart from the dimensions) to the ordinary curvilinear abscissa. It can bedefined, indirectly, through the tangent vector condition of norm −c2, namely,
V =dΩEdτ≡(
dxα
dτ
), (2.33)
withV ·V = −c2 < 0 . (2.34)
Comparing with a generic parametrization λ of the same world line,
V = V dλdτ
, withdλdτ
> 0 and V def=dΩEdλ
,
it follows that the condition (2.34) becomes

38 2 Space-Time Geometry and Relativistic Kinematics
V ·V(
dλdτ
)2
= −c2 → dτdλ
= ±1c
√−V ·V .
As τ is one of the admissible parameters for the oriented world line �+, wehave dτ/dλ > 0. So (2.34) is equivalent to the first-order differential condition:
dτdλ
=1c
√−mαβ
dxα
dλdxα
dλ. (2.35)
This condition defines the parameter τ up to an additive constant, as soon asthe parametric equations xα = xα(λ) of the curve �+ are known:
τ = τ0 +1c
∫ E
E0
√−mαβ
dxα
dλdxα
dλdλ . (2.36)
τ(E) is invariant with respect to the (completely free) choice of the param-eter λ on �+, as is clear from (2.35):
dτ =1c
√−mαβ dxα dxβ . (2.37)
This is an absolute quantity, defined on the world line, and with the dimensionsof a time. It is called proper time of the particle associated with the worldline �+, and it is proportional to the curvilinear abscissa, by a factor of c:ds = c dτ . In particular, if one assumes that a Galilean frame is fixed in M4,and t is the associated relative time, one can put λ = t, so that (2.35) givesa relation between τ and the ordinary relative velocity of the particle in theGalilean frame under consideration:
dτdt
=
√1− v(t)2
c2, v(t)2 = δikv
ivk . (2.38)
In order to find the physical meaning of the proper time let us distinguishbetween the case in which the particle world line is a straight line or hascurvature. In the first case, V=const., there exists a unique Galilean framewhich is the particle’s rest frame. This frame is defined by the vector γ =V/c and hence by the timelike congruence of straight lines with the sameorientation of �+. In such a frame, v = 0 ∀t, so that (2.38) gives t = τ , upto an unessential additive constant: the particle’s proper time coincides withthat measured by a standard clock of the Galilean rest frame.7
In the second case, instead, a Galilean rest frame for the particle doesnot exist, and all that has been said for the rectilinear cases loses its globalcharacter. That is, ∀E ∈ �+, V(E) still defines a Galilean frame, characterizedby the unit timelike vector γ = V(E)/c and, even in this case, (dτ/dt)E = 1,or dτ = dt, but only at the event E. In other words, this is the instantaneous
7 On the platform Σ orthogonal to γ, the particle’s position is always the same.

2.8 Test Particle Kinematics (Absolute and Relative) 39
rest frame of the particle, which depends on the point E considered on theparticle’s world line.
The introduction of the proper time illustrates the well-known twin paradox.Let us assume that a pair of twins (i.e. two material points), move away froma common position P0 and at the same instant t0, and hence, from the sameevent E0; besides, let us assume that the first will maintain its initial velocity,and that the other will accelerate, until a re-meeting event E1 is reached. InE1, i.e. when their world lines intersect again, for the second twin, there haselapsed a lesser quantity of proper time; that is, he is younger than the other.In fact, for the first twin, there exists a Galilean frame Sg such that
v1 = 0 ∀t ∈ (t0, t1), → τ1 = t1 − t0 .
For the second twin, in the same Galilean frame, we have
τ2 =∫
�2
dτ2 =∫ t1
t0
√1− v2
2
c2dt <
∫ t1
t0
dt = t1 − t0 ,
i.e. τ2 < τ1, which completes the proof.
2.8 Test Particle Kinematics (Absolute and Relative)
To the absolute parameter τ corresponds the absolute kinematics of the mate-rial point, through the fundamental notions of 4-velocity V and 4-accelerationA:
V =dΩEdτ≡(
dxα
dτ
), A =
dVdτ
=d2ΩEdτ2
≡(
d2xα
dτ2
). (2.39)
Apart from their names, which are clear in the relative context, V and Ahave also a clear geometrical meaning. The first one, V, is a tangent vectorto the world line �+, and the second one, A, is orthogonal to the world line,as it follows from differentiating (2.34):
V ·A = 0 . (2.40)
As a consequence, A belongs to the spacelike platform of the instantaneousrest frame; differently from V which is timelike, the 4-acceleration is a space-like vector, i.e. with positive norm:
A ·A > 0 . (2.41)
The ratio T = V/c, because of (2.34), is a unit timelike vector, that is theunit tangent vector to �+. Thus, if s denotes the curvilinear abscissa on �+
T def=dΩEds≡(
dxα
ds
), (2.42)

40 2 Space-Time Geometry and Relativistic Kinematics
then the relation between V and T becomes
V = cT , (2.43)
which is also equivalent to (2.35):
dsdτ
= c → s = cτ + const (2.44)
Analogously, by differentiating (2.43) with respect to τ , one has
A = c2C , (2.45)
where C is the spacelike curvature vector of the world line �+ in E:
C def=dTds
. (2.46)
Equations (2.43) and (2.45) specify the geometrical meaning of the vectorsV and A with respect to the world line �+. The kinematical meaning ofthese vectors will be evident once, in M4, a Galilean frame Sg is fixed by thecharacteristic vector γ and the associated spacelike platform Σ (the physicalspace).
Let t be the coordinate time of the Galilean frame (with x0 = ct), andlet P be the point orthogonal projection of E ∈ �+ on Σ. The followingdecomposition holds: ΩE = ΩP + x0γ; by differentiating this relation withrespect to the proper time, one has
V =(
d ΩPdt
+dx0
dtγ
)dtdτ
. (2.47)
Thus, taking into account (2.38), and introducing the notation (Lorentzfactor):
η =dtdτ
=1√
1− v2/c2, (2.48)
one getsV = η(v + cγ) , (2.49)
with v the particle’s relative velocity (in Sg):
v =dΩPdt
. (2.50)
Similarly to (2.49), after a further differentiation, and using the relation:
dηdt
= η3 v · ac2
,

2.8 Test Particle Kinematics (Absolute and Relative) 41
it follows that
A = η2
[a +
η2
c2(v · a) (v + cγ)
], (2.51)
with a the relative acceleration (in Sg):
a =dvdt
=d2ΩPdt2
. (2.52)
The relations (2.49) and (2.51) give the relative form, in Sg, of the 4-velocityand the 4-acceleration, and the decomposition has an invariant meaning withrespect to the choice of Sg due to the absolute character of V and A:
η(v + cγ) = η′(v′ + cγ′) = inv. (2.53)
η2
[a +
η2
c2(v · a) (v + cγ)
]= η′2
[a′ +
η′2
c2(v′ · a′) (v′ + cγ′)
]= inv.
Conversely, from (2.49), by using the orthogonality between v and γ and thefact that γ is a unit timelike vector, one finds V · γ = −ηc, or
η = −1cV · γ , (2.54)
so that (2.49) allows us to obtain the expression of v in terms of V and γ,namely,
v = −c(γ +
V(V · γ)
). (2.55)
Analogously, from (2.51), one can obtain the relative acceleration a. First ofall one has
A · γ = −η4
c(v · a),
and then, from (2.51), one gets
a =Aη2− η
c2(v · a)V =
1η2
(A +
1ηc
)(A · γ)V ,
or, explicitly, as from (2.54),
a =(
c
V · γ
)2(A− A · γ
V · γ V). (2.56)
The same result should, obviously, be obtained by differentiating (2.55) withrespect to t.
The relations (2.49) and (2.51), as well as their inverses (2.55) and (2.56),have a general character, either as concerns the pointlike motion or for theGalilean frame. In particular, in the proper Galilean frame S0
g , defined by γ =V/c, (2.55) and (2.56) give v0 = 0 and a0 = A; this specifies the kinematicalmeaning of the 4-acceleration (confirming also its spatial character).

42 2 Space-Time Geometry and Relativistic Kinematics
2.9 Lorentz Transformations
We have already stated that the essential features of a Galilean frame, in M4,are summarized by a unit timelike vector field γ:
γ · γ = mαβγαγβ = −1 , (2.57)
or by the product cγ, which represents the 4-velocity of all the particles of theassociated reference solid. The congruence of the ∞3 straight lines (coveringthe whole Minkowski space), aligned and oriented according to γ, representsthe history of the Galilean frame. Once the origin of the frame Ω is fixed, thestraight line passing through Ω, and directed along γ, is the temporal axis ofthe frame, while the orthogonal subspace through Ω defines the physical space(at t = 0) of the frame itself; in other words, the space platform of the frame,denoted by Σ.
In the three-dimensional space Σ (signature + + +), one can obviouslyintroduce Cartesian coordinates, or more general internal coordinate systems(polar, cylindrical, etc.).
The passage from absolute quantities (in M4) to their relative counterparts(in Sg) is obtained by spatial (orthogonal) projection on Σ, using the projec-tion operator
PΣ = I + γ ⊗ γ ∼ PΣαβ = δα
β + γαγβ . (2.58)
In this sense, if �+ is the world line of a material particle, the relative trajectoryon Σ is the projection of �+ orthogonally to γ. Such a trajectory clearlydepends on the selected Galilean frame.
Analogously, (2.49) and (2.55) and their inverses, (2.51) and (2.56), repre-sent the relations between the local (absolute and relative) kinematical char-acteristics: velocity and acceleration, respectively, once decomposed along γand Σ. These relations are intrinsic (i.e. only γ is needed), and the coordinatesystem is still at disposal.
Let us study, now, the passage from one Galilean frame to another. To thisend let us consider, in M4, two Galilean frames: Sg and S′
g, characterized byunit timelike vector fields γ and γ ′, respectively (γ,γ′ ∈ C+
3 ):
γ · γ ′ < 0 , γ · γ = −1 , γ′ · γ′ = −1 . (2.59)
The vector cγ ′ is the 4-velocity of any of the particles of S′g; in Sg this has
the following decomposition, according to (2.49):
cγ′ = ρ(u + cγ) , (2.60)
where u ∈ Σ is the translational velocity of S′g with respect to Sg and, from
(2.48) and (2.54),
ρ =1√
1− u2/c2= −γ · γ ′ . (2.61)

2.9 Lorentz Transformations 43
Let us change, now, the role of the two Galilean frames, in (2.60) and (2.61).This is equivalent to change unprimed quantities with primed ones and viceversa; so, by using the fundamental property of the light velocity c′ = c; wefind
cγ = ρ′(u′ + cγ′) , (2.62)
and henceρ′ =
1√1− u′2/c2
= −γ · γ′ , (2.63)
where now u′ ∈ Σ′ is the translational velocity of Sg with respect to S′g. By
comparing (2.61) and (2.63), one has ρ′ = ρ, so that the so-called reciprocitylemma follows:
u′ = u ; (2.64)
that is, the relative speed of Sg with respect to S′g coincides with that of Sg with
respect to Sg, and it does not depend on the order in which the two framesare considered.
Moreover, (2.62) allows us to obtain the decomposition of u′ along γ andΣ, similar to (2.60) for γ′. One has
cγ = ρ′(u′ + cγ′) = ρu′ + ρ2(u + cγ) ,
from which, using 1− ρ2 = −ρ2u2/c2, one finds
u′ = −ρ(u +
u2
cγ
).
Summarizing, in M4, the following transformation laws, associated with thetwo Galilean frames Sg and S′
g, hold:
cγ′ = ρ(u + cγ), −u′ = ρ
(u +
u2
cγ
). (2.65)
In (2.65), we see either the absolute character of the two Galilean frames(γ and γ ′) or the relative character of the apparent translational velocities uand u′. These last constant vectors represent two well-determined directionsin Σ and Σ′ (corresponding to apparent motions).
Thus, as in the case of the special Galilean transformations, the presenceof u and u′ in (2.65) suggests the introduction, in both the platforms Σ andΣ′, of (congruent) Cartesian triads, in standard direction. We then assumec1 = versu so that S′
g will appear (in Sg) as moving along the x1 direction:
u = uc1 ; (2.66)
c2 and c3 will be chosen so that they form, with c1, an orthogonal left-handedtriad. Similarly, in Σ′, we can use the triad8:8 According to a standard notation, we will denote indifferently c′
α or cα′ .

44 2 Space-Time Geometry and Relativistic Kinematics
c′1 = −versu′ , → u′ = −uc′1 , c′2,3 = c2,3 . (2.67)
The choice is consistent: in fact, from (2.65), c2 and c3 are orthogonal to bothc1 and γ (and hence to the 2-plane < γ,u >), and c′2 = c2 and c′3 = c3 areorthogonal to both c′1 and γ′, which belong to the previous 2-plane due to(2.65).
Moreover, the two orthonormal bases {γ, ci} and {γ′, c′i} are equi-orientedand can be superposed by using a rotation because the same property holds forthe pairs (γ,u) and (γ ′,−u′). In fact, the determinant of the transformation(2.65) is +1:
det
∣∣∣∣∣∣
∣∣∣∣∣∣ρ
ρ
cρu2
cρ
∣∣∣∣∣∣
∣∣∣∣∣∣ = ρ2(1− u2/c2) = 1 .
Thus, (2.65) gives the following transformation laws:⎧⎨⎩γ ′ = ρ(γ + βc1) , β = u/c , ρ = 1/
√1− β2,
c′1 = ρ(c1 + βγ), c′2,3 = c2,3,(2.68)
where, even if the two Galilean frames are completely arbitrary, the unit vec-tors c1 and c′1 have a precise kinematical meaning, because they characterizethe relative motion directions of the two frames:
u = uc1 , u′ = −uc′1 . (2.69)
In other words, (2.68) implies the following transformation matrix ||Lαβ ||:
∣∣∣∣∣∣∣
∣∣∣∣∣∣∣
ρ ρβ 0 0ρβ ρ 0 00 0 1 00 0 0 1
∣∣∣∣∣∣∣
∣∣∣∣∣∣∣, (2.70)
and they correspond to the special Galilean transformations. For the genericevent E ∈ M4, (2.68) gives rise to the two coordinate representations: ΩE =xαcα = x′αc′α, that is, explicitly,
x0γ + x1c1 + x2c2 + x3c3 = x′0ρ(γ + βc1) + x′1ρ(c1 + βγ) + x′2c2 + x′3c3 .
From this, one gets the direct relations:
x0 = ρ(x′0 + βx′1) , x1 = ρ(x′1 + βx′0), x2,3 = x′2,3 , (2.71)
and the inverse:
x′0 = ρ(x0 − βx1) , x′1 = ρ(x1 − βx0), x′2,3 = x2,3 ; (2.72)
because of the reciprocity lemma, the two sets of relations can be obtained, onefrom the other, by exchanging primed and unprimed quantities and β with −β.

2.10 General Lorentz Transformations: I 45
Equations (2.71) and (2.72) are the x1-standard (homogeneous) special Lorentztransformations. The inhomogeneous transformations correspond to a choiceof the origin Ω′ different from Ω, and thus, they differ by a constant translationin M4 only.
As ρ = ρ(β), the transformations (2.71) depend on the single parameter β:0 ≤ β < 1, and they form a connected group, L1. In fact, they contain theidentical transformation (for β = 0), the inverse (for β → −β), as well as theproduct of any two transformation, with
β′′ =β + β′
1 + ββ′ . (2.73)
These are special rotations (of M4) around Ω: they leave unchanged the2-plane < γ,γ′ >, as well as all the vectors in the orthogonal 2-plane Σ ∩Σ′,which plays the role of a rotation axis.
As we have already stated, also the group of the general rotations around Ω,without any special choice of the orthonormal basis vectors, form a group: thesix parameter group of the homogeneous Lorentz transformations, which willbe considered in the following section (see e.g. [2] for a structural analysis ofthe Lorentz group). We notice here that these transformations will be obtainedstarting from an orthonormal basis cα, once there are assigned the vectors γand u, satisfying the constraints γ · γ = −1 and γ · u = 0. These are onlytwo conditions for the eight variables at disposal, i.e. the components of thetwo vectors γ and u along the selected orthonormal basis {cα}; therefore inthe case Ω = Ω′ only six more free parameters remain. Otherwise, the freeparameters become 6 + 4 = 10 (inhomogeneous Lorentz group, or Poincaregroup).
2.10 General Lorentz Transformations: I
In the transformation laws (2.68), general as concerns the Galilean framesSg and S′
g, the triads T ∈ Σ and T ′ ∈ Σ′ are very special because of thex1-standard relation: u = uc1, u′ = −uc′1. This restriction, clearly, is notessential, because, using (2.68), the general case, in which T ∈ Σ and T ′ ∈ Σ′
are arbitrarily chosen, can be obtained. To perform this extension, we proceedas follows:
1. Choice of an arbitrary triad T in Sg
The problem is to rewrite (2.68) in a symmetric form, cancelling thespecial property of c1 (with respect to c2,3) due to the alignment with therelative velocity u: u = uc1 (ui = uδi
1). To this end, let us write ρc1 inthe form c1 + · · ·, using the following identity:
ρ = 1 + (ρ− 1) = 1 +ρ2 − 1ρ+ 1
= 1 +ρ2
1 + ρ
(1− 1
ρ2
),

46 2 Space-Time Geometry and Relativistic Kinematics
or
ρ = 1 +u2
c2ρ2
1 + ρ= 1 +
uu1
c2ρ2
1 + ρ. (2.74)
It follows that
ρc1 = c1 +u1
c2ρ2
1 + ρu ,
and, from (2.68)2:
c′1 = c1 +ρ
c2
(ρ
1 + ρu + cγ
)u · c1 .
Thus, (2.68) assumes the form (general as concerns the choice of T ∈ Sg):
γ ′ = ρ
(γ +
1cu), c′i = ci +
ρ
c2
(ρ
1 + ρu + cγ
)u · ci , (2.75)
where nowu = uici , ρ =
1√1− 1
c2δiku
iuk
. (2.76)
The next step is now2. Choice of an arbitrary triad T ′ in S′
g
The problem is that of replacing the preferred triad c′i in (2.75), withan arbitrary triad in Σ′. For this, it is enough to perform, in Σ′, a spatialrotation, using an ordinary orthogonal matrix Ri
k. Denoting still by c′ithe rotated triad, we have, for the most general change of orthonormalbases in M4:
⎧⎪⎪⎨⎪⎪⎩γ ′ = ρ
(γ +
1cu),
c′k = Rik
[ci +
ρ
c2
(ρ
1 + ρu + cγ
)u · ci
](k = 1, 2, 3).
(2.77)
In (2.77), there are (implicitly) six independent parameters: the threecomponents ui (or ui = u · ci = δiku
k) of the relative velocity of S′g
with respect to Sg, and three parameters for the matrix Rik (e.g. the
Euler angles or the Rodriguez parameters, see e.g. [3], p. 113). In termsof coordinates of the generic event E ∈ M4: x0γ + xici = x′0γ′ + x′ic′i,(2.77) give the general homogeneous Lorentz transformation:
⎧⎪⎪⎨⎪⎪⎩x0 = ρ
(x′0 +
1cx′kRi
kui
)
xi =ρ
cuix′0 + x′kRh
k
(δik +
1c2
ρ2
1 + ρuhu
i
)(i = 1, 2, 3).
(2.78)

2.10 General Lorentz Transformations: I 47
In the limit c → ∞, one re-obtains the general homogeneous Galileitransformation (1.12). Equation (2.78) can be inverted easily. Using thenotation
yi = Rikx
′k , y = yiui , (2.79)
Equation (2.78) become:
x0 = ρ
(x′0 +
1cy
), xi = yi +
ρ
cuix′0 +
1c2
ρ2
1 + ρyui . (2.80)
We will now derive the corresponding expressions for x′0 and yi, fromwhich the x′k will follow immediately. Let us start obtaining y; from(2.80)2, using (2.74), one gets
uixi = y +
ρ
cu2x′0 +
u2
c2ρ2
1 + ρy = ρy +
ρ
cu2x′0 ,
or
y =1ρuix
i − u2
cx′0 . (2.81)
This relation allows us to cast (2.80)1 in the form
x0 = ρx′0 +1cuix
i − u2
c2ρx′0 =
1ρx′0 +
1cuix
i ,
so that
x′0 = ρ
(x0 − 1
cuix
i
). (2.82)
From (2.81), one obtains the expression for y:
y =uix
i
ρ− ρu2
c
(x0 − uix
i
c
)= ρ
(1ρ2
+u2
c2
)uix
i − ρu2
cx0 ,
that is
y = ρ
(uix
i − u2
cx0
). (2.83)
At this point we can obtain yi, from (2.80)2:
yi = xi − 1cρ2ui
(x0 − 1
cukx
k
)− 1c2
ρ3
1 + ρui
(ukx
k − u2
cx0
)
= xi − ρ2
cui
(1− u2
c2ρ
1 + ρ
)x0 +
ρ2
c2ui
(1− ρ
1 + ρ
)ukx
k ;
moreover, using the identities,
1− u2
c2ρ
1 + ρ=
11 + ρ
(1 + ρ− u2
c2ρ
)=
11 + ρ
(1 +
1ρ
)=
1ρ
1− ρ
1 + ρ=
11 + ρ
,

48 2 Space-Time Geometry and Relativistic Kinematics
one obtains, from (2.82), the inverse form of (2.78)9:
⎧⎪⎪⎨⎪⎪⎩x′0 = ρ(x0 − 1
cuix
i)
Rikx
′k = xi − ρ
cuix0 +
1c2
ρ2
1 + ρuiukx
k (i = 1, 2, 3).(2.84)
We notice that, in obtaining the Lorentz transformation, we have assumedM4 to be endowed with one of the two light half-cones. With this assump-tion, the two Galilean frames Sg and S′
g are equi-oriented in time (in thefuture, as well as in the past): γ · γ′ < 0, that is ρ > 0. If this were nottrue, one has γ · γ ′ > 0, that is
ρ = − 1√1− β2
< 0 .
Analogously, if the two Galilean frames are equi-oriented in space (i.e. Tand T ′ both left-handed, or right-handed), in (2.78), we havedet||Ri
k|| = +1.Thus, the complete (homogeneous) Lorentz group is described by (2.78)
and (2.84), through the parameters ui andRik (the latter not independent
of each other), without any sign restriction, for ρ or for the determinantof the matrix Ri
k. However, it is not possible to pass continuously fromthe positive light half-cone to the negative one, as well as, in the sameway, it is not possible to change continuously the orientation (left-handedor right-handed) of the spatial triad T or T ′. In other words, the com-plete homogeneous Lorentz group is not connected, but it is made up offour connected parts. Each part is characterized by an orthonormal basis:{γ, ci} and {γ′, c′i}, satisfying the following conditions: (i) γ and γ′ belongto the same branch of the lightcone: γ ·γ ′ < 0, and ρ = 1/
√1− u2/c2 > 0;
(ii) the bases of M4 are equi-oriented, in the sense that the determinant ofthe relative transformation Lα
β (c′β = Lαβcα) is 1; this is also equivalent
to det||Rik|| = +1 because of (2.78) and (2.84). The transformations Lα
β
have then the form:
||Lαβ || ≡
∣∣∣∣∣∣∣
∣∣∣∣∣∣∣ρ
ρ
cuhRh
k
ρui
c
(δih +
1c2
ρ2
1 + ρuiuh
)Rh
k
∣∣∣∣∣∣∣
∣∣∣∣∣∣∣, (2.85)
and constitute a connected group (Lorentz proper group), which givesrise to the complete group by adding the space and time reflections. Theorthonormal frames {γ, ci}, belonging to any of the four connected parts
9 See [1], p. 67, taking into account that, from (2.74), one has ρ2/(1 + ρ) =c2(ρ − 1)/u2.

2.11 Relativity of Lengths and Times 49
(with the ci defined up to spatial rotations), characterize ∞3 Galileanframes which are equi-oriented both in space and in time.
Thus, the connected parts are all equivalent, as concerns the relativityprinciple, and it is not restrictive to assume that M4 is endowed with or-thonormal frames, satisfying conditions (i) and (ii) only. In other words,we will assume M4 oriented, and endowed with only one of the two lighthalf-cone, let us sayM+
4 (C+3 ). All the relations between the absolute quan-
tities of M+4 (C+
3 ) will automatically satisfy the relativity principle. So wewill proceed by formulating, in M+
4 (C+3 ), the physical laws, starting from
the dynamical ones, passing then to consider the relative formulation in acertain Galilean frame, i.e. defining the relative ingredients starting fromthe absolute quantities.
2.11 Relativity of Lengths and Times
In the limit c → ∞, (2.65) reduces to γ′ = γ: M+4 (C+
3 ), degenerates to theCartesian product of an Euclidean 3-space and an oriented straight line, whileu′ = −u is the complete reciprocity theorem. In the same limit, (2.71) reducesto the special Galilei transformation (1.13).
When c is finite, (2.65) states the relative meaning of lengths and timesassociated with a Galilean frame. Let us write (2.71) and (2.72) in the usualform (i.e. with t = x0/c, x1 = x, x2 = y, x3 = z and analogously for the primedvariables):
t =1√
1− β2
(t′ +
β
cx′), x =
1√1− β2
(x′ + cβt) , y = y′ , z = z′ ,
(2.86)as well as
t′ =1√
1− β2
(t− β
cx
), x′ =
1√1− β2
(x − cβt) , y = y′ , z = z′ ,
(2.87)where β = u/c. The typical relativistic mixing of space and time coordinatesis evident from these relations; moreover, they allow us to derive some kine-matical effects, already contained in the postulates.
1. Relative meaning of simultaneityLet us consider two events E and F happening, in S′
g, at two differentpoints of the x′-axis, say A′ and B′, and here to be simultaneous t′E =t′F = t′0, that is
E ≡ (t′0, x′E , 0, 0) , F ≡ (t′0, x
′F , 0, 0).
How do these events manifest themselves in the frame Sg? They stillhappen on the x-axis (yE = zE = 0; yF = zF = 0), but they are no longersimultaneous. In fact, from (2.86)1 one has

50 2 Space-Time Geometry and Relativistic Kinematics
tE =1√
1− β2
(t′E +
u
c2x′E), tF =
1√1− β2
(t′F +
u
c2x′F),
(2.88)so that
tF − tE =u
c2√
1− β2(x′F − x′E) ; (2.89)
if x′F = x′E , obviously, the two events coincide, both in Sg or in S′g, but,
in general, tF − tE �= 0.Also the time ordering has a relative meaning: t′F > t′E may coexist
with tF < tE , unless the two events are in a causality relation, i.e. E andF are associated with the same timelike world line.
2. Time dilationLet us consider a phenomenon happening at a fixed point of S′
g, over atime period T0. What is its duration in Sg? To answer this question, it isenough to specify its duration by means of the initial and final instantsand to consider the associated events, E and F .
Let (x′, 0, 0) be the point of S′g where the phenomenon happens, and
tE and tF = tE +T0 be the initial and final instants. From (2.88) one has
T = tF−tE =1√
1− β2
(t′F +
u
c2x′)− 1√
1− β2
(t′E +
u
c2x′)
=t′F − t′E√
1− β2,
so thatT =
T0√1− β2
> T0 ; (2.90)
thus, in Sg, the duration of a local phenomenon of S′g appears longer: this
result is known as time dilation. For example, the life of an observer in S′g
appears longer, when measured with the universal time of Sg.3. Lorentz contraction
Let a rod A′B′, of length L0, be at rest along the x′-axis in S′g and let
the endpoint A′ be at Ω while B′ is at x′ = L0; what is the length of therod, as measured from Sg? Operationally, one has to measure the distanceL between the intersections A and B left, on the x-axis, by the world linesof A′ and B′ at a fixed instant t of Sg.
Using (2.87) one has
x′B − x′A =xB − ut√
1− β2− xA − ut√
1− β2=xB − xA√
1− β2,
or L0 = L/√
1− β2, so that
L = L0
√1− β2 < L0 . (2.91)
In other words, the rod, in Sg, appears contracted by a factor depending onits speed u: this phenomenon is called Lorentz contraction of the moving

2.12 Muon Mean Life and the Time Dilation 51
lengths. It is worth noting that the contraction concerns the directionof motion of S′
g (that is of the rod) with respect to Sg; if the rod weredisplaced orthogonally to the x-axis, there would be no contraction (y′ =y, z′ = z).
Moreover, as the Lorentz factor should be real, the relative speed u ofS′
g with respect to Sg should always be less than c. This is consistentwith postulate E, which prohibits any particle motion at a speed fasterthan that of light. This axiom could be verified as a whole, assuming—for absurdity—that an electromagnetic signal could travel with a speedgreater than c. Then it would be possible to receive the same signal beforeits emission, and even to send it back to the emitter, before it actuallywould have been emitted; this would be a clear violation of the causalityprinciple.
It is also interesting that it is still possible to have a weak form of specialrelativity without assuming the postulate E, accepting the above statedviolation of the causality principle.
Note. Equations (2.71)–(2.72) may have a double interpretation:• Like a Cartesian coordinate change, for the generic event E ∈M4, this
governs the passage from an affine frame to another and vice versa.It is the most natural interpretation, and it is adapted to the abso-lute character of the events. In this sense, this should be the primaryinterpretation.
• Like an endomorphism of M4, in the sense that the xα and the x′α
are associated with different points: E and E′ respectively, in the sameaffine frame R ≡ (Ω;γ, ci). From this point of view, it leaves each ofthe two light half-cones invariant and gives the correct meaning to thenotions of past, present and future of an event.
An important consequence of the relativistic speed limit should be notedhere. It implies the impossibility of the existence of rigid bodies in relativ-ity. For if any body is pushed at one point, the opposite part of the bodycannot immediately start to move, otherwise we would have transmitted asignal at infinite speed. So every body must be deformable, and not rigid.
2.12 Muon Mean Life and the Time Dilation
Let us consider (2.91) for the length contraction. This necessitates a rigid rodfor which a Galilean rest frame would exist; in this frame, its length is L0
(proper length). In a Galilean frame in which the rod is in linear and uniformmotion, with longitudinal (i.e. in the direction of the rod) velocity v, its lengthis no longer L0, but
L = L0
√1− v2/c2 . (2.92)
In other terms, this is a purely spatial phenomenon, i.e. a sequence of eventswhich admits a Galilean frame where they all happen at the same time, but

52 2 Space-Time Geometry and Relativistic Kinematics
they are localized in points of a segment. In another Galilean frame, the spatiallocalization of the points is exactly of the same kind, but they are no moresimultaneous.
The situation is similar for a purely temporal phenomenon, i.e. a sequenceof events which admits a Galilean frame where they all are located at thesame position, but they correspond to different times and (2.90) holds. Wemean that, while in the rest frame, the phenomenon is only characterized byits duration T0 (proper duration), in another Galilean frame Sg, the eventsnot only happen in different places but give rise to a uniform motion withvelocity v, the duration of which is
T = T0/√
1− v2/c2 . (2.93)
In (2.92) and (2.93), the Lorentz factor η appears, which is very close to 1when v � c as for bodies in the solar system. Thus, at least in this regime, therelativistic effects of length contraction and time dilation are not relevant. Forinstance, if v/c ∼ 10−4, corresponding to the Earth orbital motion, then 1/η =0.000995. Hence, from (2.92) and taking into account that the Earth diameterisD0 � 109 cm, the Earth, as seen by a Sun observer, would appear contracted(longitudinally) by about 6.5 cm. Analogously, from (2.93), a purely temporalEarth phenomenon, lasting a century, when examined from the Sun, wouldhave a duration of 2.5 min more. The effects become important when thevelocities approach that of light, as it happens, microscopically, for elementaryparticles.
Let us consider the experimental data for the muons which are contained inthe cosmic rays. They have the same charge as the electron, but a 200 timesheavier mass. Their proper life is very short: T0 = 2.15 × ·10−6s, and then,after this time (on average), they spontaneously decay into an electron (withthe same charge) and two neutrinos.
In a time interval of the amount of their proper life, even if they could moveat the speed of light, they could make a very short path: L = cT0 = 645 m.This result would be not acceptable because of the experimental observationof muons in the atmosphere, which were produced at more than 1 km higher.It is explained by the relativistic time dilation, according to which the real lifeof muons is T = T0/
√1− v2/c2 and depends on their velocity. Thus, using
the experimental value v = 0.99 c, one gets η = 10, and the path becomes∼ 6400 m, in agreement with observations (see [5], pp. 33–34).
2.13 Theorem of Relative Motions
Let us start from formulas (2.86) and (2.87), which specify the change ofthe coordinates, for a space-time event passing from a Galilean frame Sg toanother frame S′
g; the aim is to discuss the problem of relative motions.

2.13 Theorem of Relative Motions 53
To this end, let us consider, in Sg, a pointlike motion M: xi = xi(t), t ∈(t0, t1). From (2.87) we have, immediately, the parametric equations x′α(t) ofthe curve corresponding to M in S′
g:
t′ =t− β
cx(t)√
1− β2, x′ =
x(t)− cβt√1− β2
, y′ = y(t), z′ = z(t) . (2.94)
From the first relation, in principle, one can deduce t = t(t′), and substitutein the others obtaining then x′i = x′i(t′). From these, by differentiation withrespect to t′, one gets the components v′i = (dx′i/dt′) of the relative velocityv′ in S′
g:
v′i =dx′i
dtdtdt′
,
withdtdt′
=1
dt′/dt=
√1− β2
1− uv1/c2. (2.95)
The relations between the x-standard components of the relative velocityv and v′ then follow easily:
v′1 =v1 − u
1− uv1/c2, v′2,3 = v2,3
√1− β2
1− uv1/c2. (2.96)
Equation (2.96) represents, though in a scalar form, the relativistic additionof velocity law. It can also be cast in a vectorial form, independent of thechoice of the Cartesian triads in Sg and S′
g. For instance, the denominator ofthe two fractions in (2.96) is simply 1− u · v/c2. Let us introduce, thus, thetwo quantities, invariant with respect to internal transformations of Sg:
α =√
1− u2/c2 , σ = 1− u · v/c2 ; (2.97)
so that (2.96) becomes
v′1 =v1 − uσ
, v′2,3 =α
σv2,3 . (2.98)
To get the vectorial formula, one needs to remember that this should be anextension of the classical relation v′ = v − u; that is, it will be a relationbetween 3-vectors and it should be referred to Sg or S′
g; a priori, this is notcorrect: in fact v and v′ are 3-vectors in the two platforms Σ and Σ′, and itis not possible to pass from one to the other, without using γ or γ′. However,an indirect comparison, between the two platforms, can always be done: i.e.it is possible to boost Σ′ on Σ by means of a rotation of M4. This makes theunit vectors c′i coincident with the ci (i = 1, 2, 3). In other words, betweenthe vectors s′ ∈ Σ′ and those s ∈ Σ, there exists an invertible isometry map

54 2 Space-Time Geometry and Relativistic Kinematics
R so that s′ → Rs′ ∈ Σ; such a correspondence can be given by interpretingthe components of s′ along T ′ as components along T :
s′ = s′ic′i → Rs′ = s′ici . (2.99)
Clearly, this map implies Ru′ = −u and it leaves invariant those vectors (inΣ′) which are orthogonal to u′. Then, one can identify Rv′ = v′ici, or simply,by omitting the symbol R for brevity, v′ = v′ici.
It is convenient to recast (2.98)1 in the following form:
v1 = αv1 + (1− α)v1 = αv1 +β2
(1 + α)v1 ,
i.e. using the relation uv1 = uv · c1 = u · v:
v1 = αv1 +1c2
u · v1 + α
u . (2.100)
Thus,
v′1 =α
σv1 +
1σ
(1c2
u · v1 + α
− 1)u , v′2,3 =
α
σv2,3 ;
hence,
v′ =α
σv +
1σ
(1c2
u · v1 + α
− 1)
u ,
and finally, using (2.97)2,
v′ =1σ
(αv − α+ σ
1 + αu). (2.101)
Equation (2.101) represents the relativistic theorem of relative motions (itis also known as the velocities transformation formula). It has an intrinsicmeaning, i.e. it does not depend on the choice of the two triads T ∈ Sg andT ′ ∈ S′
g, and it is valid for any choice of the two frames. The Galilean formula,v′ = v − u, obviously comes from the c→∞ limit.
Equation (2.101) should be considered together with the link between therelative times t and t′. In differential terms, this link (all along the motion) isexpressed by (2.95), which can also be written in intrinsic form, as:
dtdt′
=α
σ. (2.102)
However, in the case v =const., we also have σ =const. and hence, from(2.101): v′ =const. Thus, linear and uniform motions have an intrinsic mean-ing, as in classical mechanics. This was already known: v =const. implies V =const. and then v′ =const.
The transformation law of the velocities (2.101) is compatible with theaxiom E, in the sense that it implies v′2 < c2 whenever v2 < c2. In fact, from(2.101) and (2.97) one has

2.13 Theorem of Relative Motions 55
v′2 =1σ2
[α2v2 +
(α+ σ
1 + α
)2
u2 − 2α(α+ σ)
1 + αu · v]
=c2
σ2
[α2 v
2
c2+(α+ σ
1 + α
)2
(1− α2)− 2α(α+ σ)
1 + α(1 − σ)
]
=c2
σ2
{α2 v
2
c2+α+ σ
1 + α[(α+ σ)(1 − α)− 2α(1− σ)]
}
=c2
σ2
[α2 v
2
c2+α+ σ
1 + α(1 + α)(σ − α)
]
=c2
σ2
[α2
(v2
c2− 1)
+ σ2
],
and thusv′2
c2− 1 =
(ασ
)2(v2
c2− 1), (2.103)
which completes the proof.Equation (2.103) can be obtained directly, from (2.38), which, because of the
absolute meaning of the proper time τ , gives rise to the following invarianceproperty (with respect to the choice of the Galilean frame and along a givenworld line): √
1− v2
c2dt =
√1− v′2
c2dt′ = inv. = dτ . (2.104)
It then follows, using (2.102), that
α
σ=
√√√√√√√1− v′2
c2
1− v2
c2
=η
η′,
i.e. (2.103), or, equivalently,η′ = η
σ
α. (2.105)
Let us note that (2.101) can also be derived from the invariance of the4-velocity: η(v + cγ) = inv. = η′(v′ + cγ′); using (2.105), this becomes v′ +cγ′ = α/σ(v + cγ), which gives immediately the components v′i = v′ · c′i,taking into account (2.68).
Note. The isometric boost of the two spaces Σ and Σ′, necessary to comparethe relative ingredients associated with the frames Sg and S′
g, can be bet-ter geometrically formalized acting directly on vectors, rather than on theirCartesian components with respect to the two triads T and T ′ in x-standardrelation. According to this point of view, one interprets the effective compo-nents of a vector v′ ∈ Σ′ as if they were along the triad T (that is on Σ), thus

56 2 Space-Time Geometry and Relativistic Kinematics
verifying that the associated map is an isometry. Therefore, more generally,one can operate independently on the triads T and T ′. For the transformedisometric vector Rv′ of a vector v′ ∈ Σ′, we have
Rv′ = σ − λu ∼ Rv′ = s + λ(ρ− 1)u ,
with σ = s + λρu and
λdef=
1u2
v′ · u′ , ρ =1√
1− β2, β =
u
c.
In these relations, there appears σ, i.e. the orthogonal projection of v′ on the2-plane Σ ∩ Σ′ (the “axis” of the rotation), as well as s, i.e. the orthogonalprojection of v′ on Σ, orthogonally to γ. The two expressions are equivalent.In particular, when v′ = u′, one gets σ = 0, and hence λ = 1, Ru′ = −u; ifinstead v′ ∈ Σ ∩ Σ′ (v′ · u′ = 0), one has λ = 0 and s = σ.
2.14 Optical Experiments and Special Relativity
As an application of the theorem (2.101) on relative motions, let us reconsiderhere the optical experiments, previously discussed in terms of classical physics.
1. Stellar aberrationVector multiplication, by u, of both sides of (2.101), yields
v′ × u =α
σv × u ,
from which, using v = v′ = c, it follows that
cu sin θ′ =α
σcu sin θ ,
or
sin θ′ = sin θ
√1− u2
c2
1− u
ccos θ
. (2.106)
To first order in β = u/c:√
1− β2
1− β cos θ� 1 + β cos θ ,
so that sin θ′ − sin θ � u/c sin θ cos θ. Now, using θ′ = θ + Δθ, to firstorder in Δθ one has sin θ′ − sin θ � cos θΔθ, and hence (2.106) assumesthe classical form (1.29): Δθ = β sin θ.

2.14 Optical Experiments and Special Relativity 57
2. Relativistic luminal Doppler effectThis effect can be obtained by considering, either from an absolute ora relative point of view, the photon as a material particle, taking intoaccount the fundamental property: the photon frequency ν satisfies theinvariance property
dtν
=dt′
ν′= inv. (2.107)
with respect to any change of Galilean frames. Using (2.102), one thenhas the relativistic Doppler effect formula:
ν′ − νν
=Δνν
=1− u
ccos θ√
1− u2
c2
− 1 , cos θ =u · cuc
. (2.108)
From this follows a longitudinal effect (c parallel to u):
Δνν
=1− εu
c√1− u2
c2
− 1 , ε = ±1 , (2.109)
which, to first order in u/c, reduces to the classical effect:
Δνν� εu
c.
If, instead, the velocity c of the light ray is perpendicular to u (trans-lational velocity of S′
g with respect to Sg), (2.108) gives the transverseDoppler effect formula:
Δνν
=1√
1− u2
c2
− 1 > 0 . (2.110)
One then finds more than a simple relativistic correction: a new phe-nomenon which is of the second order in u/c:
Δνν� 1
2u2
c2.
3. Fresnel–Fizeau effectLet us assume S′
g as the water rest frame; the light signal speed is thenv′ = c/n, with n the refraction index of the water. Assuming that thedirection of propagation of the light, in Sg coincides with u, what is thevalue of the speed of light in Sg? We need to use the inverse formula of(2.101), obtained by exchanging primed and unprimed quantities:

58 2 Space-Time Geometry and Relativistic Kinematics
v =1σ′
(αv′ − α′ + σ′
1 + α′ u′).
But u′ = −u, so that
v =1σ′
(αv′ +
α+ σ′
1 + αu), (2.111)
whereα =√
1− u2/c2 , σ′ = 1 + u · v′/c2 . (2.112)
In our case, v′ = εcu/(nu), with ε = ±1; then (2.111) becomes
v =1σ′
(αεc
n+α+ σ′
1 + αu
)uu.
In other words, the light ray velocity, in Sg, is v = v versu, with
v =1σ′
(αεc
n+α+ σ′
1 + αu
), σ′ = 1 +
εu
nc, ε = ±1 . (2.113)
This is an exact relativistic formula. To first order in u/c (so that α � 1),one gets
v = εc
n+(
1− 1n2
)u , ε = ±1 , (2.114)
from which, when ε = 1 (propagation along u), one obtains the earlier seen(1.38). Nothing surprising, of course, in this result, because the Lorentztransformations reduce to the Galilei ones, to first order in β.
4. Michelson–Morley experimentHere a difference appears because the involved effect is of second order inβ. Assuming that the Earth is an inertial frame S′
g, also in the relativisticcontext, the light velocity v′ should be the same (c) in each direction (op-tical isotropy of the Earth), and hence ΔT = ΔT ′, or Δ = 0, according tothe previous notation. Thus, the lack of fringe shift is in perfect agreementwith special relativity. In other words, the Michelson–Morley experimentin agreement with the special theory of relativity confirms that the Earthis a Galilean frame (to the second order), as in classical mechanics.
2.15 Coriolis Theorem
From the theorem of relative motions (2.101), considered for an arbitrarymotion M, after differentiation with respect to t′, one gets the relative ac-celeration composition law in the context of Galilean frames, or the Coriolistheorem, even if, classically, this theorem concerns any kind of frame and thushas a more general meaning.

2.15 Coriolis Theorem 59
More precisely, using (2.102): dt/dt′ = α/σ, and (2.97) for the definition ofα and σ, from (2.101) one gets
a′ =α
σ
[1σ
(αa − σ
1 + αu)− σ
σ2
(αv − α+ σ
1 + αu)]
=α
σ2
[αa +
(u · a)uc2(1 + α)
+u · ac2σ
(αv − α+ σ
1 + αu)]
=α2
σ3
[σa +
u · ac2
(v − 1
1 + αu)]
=α2
σ3
[a− (u · v)
c2a +
(u · a)c2
v − (u · a)c2(1 + α)
u],
and finally,
a′ =α2
σ3
[a +
1c2
u× (v × a)− (u · a)c2(1 + α)
u], (2.115)
with the inverse relation
a =α2
σ′3
[a′ − 1
c2u× (v′ × a′)− (u · a′)
c2(1 + α)u], (2.116)
whereσ′ = 1 +
1c2
u · v′ . (2.117)
Equation (2.115) represents the relativistic version of the Coriolis theoremin intrinsic form in Sg. However, as already stated, it is only a partial gen-eralization, because, in special relativity, only Galilean frames are admitted.Actually, it generalizes the classical theorem: a′ = a on the acceleration in-variance in the context of Galilean frames, to which it reduces in the limitc→∞. Similarly, also the theorem of relative motion (2.101) generalizes thecorresponding classical one: v′ = v−vτ , with vτ the dragging velocity, only inthe case vτ = u =const. Equation (2.115) has been obtained by differentiat-ing with respect to t′ the analogous relation (2.101). However, we should haveperformed two different steps: (1) evaluate, starting from (2.96), the relationsamong the components ai and a′i of the relative accelerations with respect toT and T ′; (2) interpret the result in intrinsic form, boosting the triad of S′
g inSg. But the result would have been the same because boosting Σ′ on Σ anddifferentiating with respect to time are two commutable operations.
Equation (2.115) shows that, differently from classical mechanics, the rel-ative acceleration is not invariant passing from one frame to another. Theinvariance exists only for uniform rectilinear motions: a = 0 implies a′ = 0.
Relativistic kinematics determines second-order corrections to the classicalrelative motion theorems: v′ = v − u and a′ = a. In fact, from
α
σ� 1 +
1c2
(u · v − 1
2u2
),

60 2 Space-Time Geometry and Relativistic Kinematics
and1 + α/σ
1 + α� 1 +
12c2
(u · v +
12u2
),
one gets⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
v′ � v − u +1c2
[(u · v − 1
2u2
)v − 1
2
(u · v +
12u2
)u]
a′ � a +1c2
[(3u · v − 1
2u2
)a + u× (v × a)− 1
2u · au
].
.Note. As we have already stated, comparison between vectors on Σ and
Σ′ is related to the isometric boost of Σ′ to Σ; it depends only on the twoplatforms and not on the choice of the origins Ω and Ω′. More precisely, if thetwo origins do coincide, the boost (rotation around Ω = Ω′ in the 2-plane γand γ′) induces a map between points P′ ∈ Σ′ and P ∈ Σ. The special Lorentztransformations (2.87) can be then interpreted intrinsically in Σ, associatingwith x′i the Cartesian coordinates (in T ) of the image of P’ in Σ. Fromthis point of view, denoting (with an abuse of notation) with P’ this imagetoo, the special Lorentz transformations can be summarized in the followingcorrespondence (t,P)↔ (t′,P′) (see [6], p. 41):
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
t′ =1α
(t− 1
c2ΩP · u
),
ΩP′ = ΩP− 1α
(t− 1
(1 + α)c2ΩP · u
)u .
2.16 Vectorial Maps
In order to use the map language, which permits one to treat, in an intrinsicway, mixed tensors of any rank in any vector space, let us briefly summarizehere its most important properties (see [1], pp. 24–44).
A vectorial map t, defined in a vector space En, is a linear map of En intoEn (endomorphism):
t : v → t(v) ∈ En ∀v ∈ En , (2.118)
satisfying the linearity condition:
t(au + bv) = at(u) + bt(v) ∀u,v ∈ En, a, b ∈ R . (2.119)
The set Ω of all the maps of En has the structure of a linear space. In fact, ift, t′ ∈ Ω, and a ∈ R, we can define

2.16 Vectorial Maps 61
t+ t′ : (t+ t′)(v) = t(v) + t′(v) , at : (at)(v) = at(v) , ∀v ∈ En ;
the maps t + t′ and at are linear (like t and t′), and all the axioms of avector space are satisfied. It follows that Ω is a vector space isomorphic to thespace of (affine) mixed tensors tik; hence it can be identified with this space,associated with En, having dimension n2.
Such isomorphism (linear and bijective) follows by considering the quanti-ties tik obtained by decomposing, with respect to the fixed basis {ei} ∈ En,the transformed vectors of the basis themselves:
t(ek) = tikei (k = 1, 2, ..., n) . (2.120)
Thus, the quantities tik are the components of the mixed tensor associatedwith the map t; they are called coefficients of the map t, with respect to thebasis {ek}. The map t operates by linearity on a generic vector v ∈ En:
t(v) = t(vkek) = vkt(ek) = vktikei , (2.121)
i.e. the transform with respect to a given basis {ei} of a vector is a vector,obtained by contracting the original components with the coefficients of themap, in that basis:
vi → vktik . (2.122)
If En is a Riemannian space, i.e. endowed with a nonsingular metric gik:det||gik|| �= 0, the position of the indices in tik is inessential, in the sense thatone can pass from tik to the other equivalent forms: covariant, contravariantand mixed (tik = gijg
hktjh). In general, instead, the tensor tik defines twodifferent map laws, corresponding to the cases in which the contracted indexis the first or the second one:
vk → vitki or vk → vitik , (2.123)
and one needs to specify if the transformed vector of v if left transformed, orright transformed.
We note that the coefficients of the map are essentially dependent on thechoice of the basis {ei}, and they transform according to the tensorial law.However, considering the matrix ||tik|| of the coefficients of the map, it is easyto check that there exist n scalar quantities, related to the matrix, which areindependent of the chosen basis {ei}. These are the fundamental invariantsof the map: Ik (k = 1, 2, ..., n), and coincide with the sum of principal minorsof order k of the matrix ||tik|| 10:
Ik =1k!δα1...αk
β1...βktβ1
α1 . . . tβk
αk, k = 1 . . . n , (2.124)
10 A minor is principal if its principal diagonal is included in that of the originalmatrix.

62 2 Space-Time Geometry and Relativistic Kinematics
where11
δα1...αk
β1...βk= k!δα1
[β1. . . δαk
βk] . (2.125)
In particular, one has
I1 = t11 + t22 + · · ·+ tnn = Tr t , In = det||tik|| .
A map is called proper, if the invariant of maximum order In = det||tik||is nonzero, and this is an absolute property. In this case, t maintains linearindependence, in the sense that it transforms independent vectors into inde-pendent vectors; in particular, the transform of a nonzero vector always isnonzero.
Conversely, if In = 0, the map is called degenerate, and there always exists anonzero vector v whose transform is zero. The set of vectors v ∈ En satisfyingthe condition t(v) = 0 forms a vector subspace of En, which is called the kernelof t. For a proper map, the kernel is reduced to the zero vector only.
A vector v ∈ En such that t(v) is parallel to v,
t(v) = λv , λ ∈ R , (2.126)
is called an eigenvector of t; λ is the corresponding eigenvalue of t, associatedwith v. Because of the linearity property of t, from (2.126), it is clear that ift admits an eigenvector v, then it admits ∞1 eigenvectors, all parallel to v:t(av) = at(v) = λav, and forming a one-dimensional subspace, say < v >.
Equation (2.126) can be conveniently written as t(v) = λt0(v), where t0 isthe identity map: t0(v) = v, having as coefficients the Kronecker tensor δk
i .12
Therefore, (2.126) assumes the form:
(t− λt0)(v) = 0 . (2.127)
In order that the latter condition to be satisfied, for nonzero vectors (propereigenvectors), the map t − λt0 must be degenerate, leading to the followingcondition for λ:
det||t− λt0|| = 0 , (2.128)
or, explicitly, the eigenvalue equation:
n∑k=0
(−1)kIn−ktk = 0 , (2.129)
11 As standard, indices antisymmetrization is denoted by square brackets while sym-metrization by round brackets. For example, for a 2-tensor A we have
A[αβ] =1
2(Aαβ − Aβα) , A(αβ) =
1
2(Aαβ + Aβα) .
12 The notation t0 = I is also used and especially when two or more maps areinvolved.

2.16 Vectorial Maps 63
or, explicitly
(−1)nλn + (−1)n−1I1λn−1 + · · · − In−1λ+ In = 0 . (2.130)
The (complex) solutions of (2.130), when substituted back in (2.127), give riseto a linear system, which, for each real λ, gives the associated eigenvectors.In scalar terms, one must solve the linear homogeneous system:
(tik − λδik)vk = 0 , (2.131)
which, because of (2.128), admits at least one real eigensolution vi (if λ andtik are real).
The following general property holds: eigenvectors associated with distincteigenvalues are independent. A case of special interest is when t has n distincteigenvectors, with which one can form (in an infinite number of ways), a basisof eigenvectors. In this case, with a proper selection of the basis vector, themap assumes a diagonal form:
∣∣∣∣∣∣∣∣
∣∣∣∣∣∣∣∣
λ1 0 · · · 00 λ2 · · · 0...0 0 0 λn
∣∣∣∣∣∣∣∣
∣∣∣∣∣∣∣∣,
where λ1, ..., λn are the (all distinct) eigenvalues of t. As already stated, theintroduction of a nonsingular metric, gik = ei · ek (with inverse gik = ei · ek,and ei the dual basis of ei), allows one to identify the mixed tensor tik withits covariant counterpart: tik = gilt
lk, or the contravariant one: tik = gkltil
and also the (other) mixed one: tik = gilgkmtlm.
As a consequence, there exist other equivalent forms to express the paral-lelism condition (2.126), as well as the condition (2.128). For example, thecovariant form of (2.126) is
tikvk = λvi = λgikv
k , (2.132)
so that (2.128) becomes
det||tik − λgik|| = 0 . (2.133)
In Riemannian spaces, symmetric tensors, tik = tki (and t(ik) = tik), have aparticular importance as concerns their eigenvectors, satisfying the followingproperty: eigenvectors corresponding to distinct eigenvalues, are orthogonalto each other, besides being independent. This does not exclude that a singlevector can be isotropic, but this cannot be true for two isotropic vectors be-cause they cannot be orthogonal. In particular, in Riemannian spaces, if then eigenvalues of a symmetric tensor t are real and distinct, the correspondingn eigendirections are orthogonal in pairs, and give rise to a basis of orthonor-mal eigenvectors. Moreover, if En is strictly Euclidean, the previous result

64 2 Space-Time Geometry and Relativistic Kinematics
generalizes so that each symmetric 2-tensor is diagonalizable; that is, as aconsequence of the symmetry, one has the reality of the eigenvalues, as wellas the existence of orthonormal bases made up of eigenvectors.
Associated with a map t, one has also other maps:
1. the conjugate map : Kt (also denoted by tT ), such that (Kt)ij = tj
i;2. the complementary map : Rt, such that (Rt)i
k (Kt)kj = (det t)δi
j ;3. the inverse map : t−1, such that (t−1)i
k tk
j = tik (t−1)kj = δi
j .
A number of relations among the invariants of t and related maps (Kt,Rt,t−1) can be derived. For example, we have
I1(Kt) = I1(t),I1(t2) = I2
1 (t)− 2I2(t)I1(t3) = I1(t)I1(t2)− I2(t)I1(t) + 3I3(t) ,
etc.13 A used terminology is the following:
1. if t = Kt, then t is said a dilation map;2. if t = −Kt, then t is said an axial map.
Moreover, the Hamilton–Cayley identity [1],
n∑k=0
(−1)kIn−k(t)tk = 0 , (2.134)
can be used to express the inverse map as a polynom in the map t withcoefficients the fundamental invariants:
t−1 =1
In(t)
n−1∑j=0
(−1)j In−1−j(t)tj I0(t) = 1 . (2.135)
For n = 4, we have explicitly
t−1 =1
I4(t)[I3(t) I−I2(t)t+ I1(t)t2 − t3] , (2.136)
which for antisymmetric tensors, having I1(t) = 0 and I3(t) = 0, specializesto the form13 Furthermore, if t and τ are two generic vector maps, a number of identities among
the associated invariants can be derived, e.g.
I2(t + τ ) = I2(t) + I2(τ ) + I1(t)I1(τ ) − I1(tτ ) ,
I3(t + τ ) =1
3
[I1(t
3) + I1(τ3) + 3I1(t
2τ ) +
+ 3I1(tτ2) − I3
1 (t + τ ) + 3I1(t + τ )I2(t + τ )]
.

2.17 Levi–Civita Indicator and Ricci Tensor 65
t4 = −I4(t) I−I2(t)t2 . (2.137)
Finally, in special case in which t is a Rotation , i.e. Kt = t and In(t) = 1the following (Cayley) representation of t holds: there exist a unique skew-symmetric map Q (KQ = −Q) so that
t = (I−Q)−1(I +Q) . (2.138)
2.17 Levi–Civita Indicator and Ricci Tensor
In any manifold of dimension n (and hence in M4), one can introduce theaffine tensor, also known as Levi–Civita indicator εi1...in . This is a n-indicessystem whose components can only assume values 1, 0,−1, and precisely
εi1...in =
⎧⎨⎩
0 if the indices are not all distinct(−1)p if the indices form a p class
permutation (even or odd) of 12 . . . n.(2.139)
εi1...in can be defined in terms of the generalized Kronecker delta:
εi1...in = δi1...in1...n , εi1...in = δ1...n
i1...in. (2.140)
In M4, referred to Cartesian coordinates, we have ε0123 = 1, and εαβρσ isan odd-type tensor (changing sign according to the orientation of M4) whosecomponents transform with the law:
ε′αβρσ = ±∂x′α
∂xλ
∂x′β
∂xμ
∂x′ρ
∂xν
∂x′σ
∂xτελμντ , (2.141)
with the sign + or − depending on whether
det
∣∣∣∣∣∣∣∣∣∣∂x
′α
∂xλ
∣∣∣∣∣∣∣∣∣∣ = ±1.
In the case of Riemannian spaces (associated with a metric gij , with g =det||gij ||) and general (non-Cartesian) coordinate systems, the role of theLevi-Civita indicator is played by the Ricci tensor (see e.g. [1] p. 77) definedby
ηi1...in = [sgn g]√|g|εi1...in , (2.142)
where one has the [sgn g] = +1 when g > 0 and [sgn g] = −1 when g < 0.ηi1...in is a true tensor, differently from the Levi–Civita indicator, and it isassociated with the unit volume n-form; in M4, referred to Cartesian coordi-nates, we have η0123 = −ε0123 = −1; when the coordinates are not Cartesianwe have instead
ηαβμν = −√|g|εαβμν , ηαβμν =
1√|g|εαβμν . (2.143)

66 2 Space-Time Geometry and Relativistic Kinematics
It is also useful to recall the identities:
ηαβρσηαβμν = −2δμν
ρσ , ηαβρσηαλμν = −δλμν
βρσ . (2.144)
The Ricci tensor is used to define the space-time dual of tensors of any rank.In fact, if ti1...ip is an antisymmetric tensor of rank p (i.e. a p-form), the dualof t is the antisymmetric tensor of rank 4− p defined by
∗tip+1...i4 =1p!ηi1...ipip+1...i4ti1...ip . (2.145)
In particular, if t ≡ tj is a vector (p = 1), we have
∗tijk = ηmijktm ; (2.146)
if t ≡ tij is an antisymmetric tensor of rank 2 (p = 2), we have
∗tij =12ηlmijtlm , (2.147)
so that the dual is also an antisymmetric tensor of rank 2; if t ≡ tijk is anantisymmetric tensor of rank 3 (p = 3), we have
∗ti =16ηijkltjkl , (2.148)
so that the dual is a vector; finally, if t ≡ tijkl is an antisymmetric tensor ofrank 4 (p = 4), we have
∗t =124ηijkltijkl , (2.149)
so that the dual is a function or a 0-form. The duality operation can be iteratedand for an antisymmetric p-tensor we have
[∗∗t]i1...ip = [sgn g] (−1)p(n−p)ti1...ip . (2.150)
It is worth to note that in the two cases, “space-time” (n = 4, [sgn g] = −1)and space (n = 3, [sgn g] = 1), the previous relation imply
∗∗t = (−1)p−1t (space− time) (2.151)∗∗t = t (space) . (2.152)
A final remark concerns notation for the duality operation. It is conventionalto put the * on the left of the symbol denoting the tensor (unless one needsnot to specify a right-duality operation different from a left-duality operation,especially when dealing with antisymmetric tensor of rank higher than 2).This notation is but less convenient when one uses index-free notation andproducts of many vector maps. Therefore, with an abuse of notation, in suchcases, we often put the * over the letter denoting the tensor.

2.18 General Lorentz Transformations: II 67
2.18 General Lorentz Transformations: II
In this section, we study the geometry of 4-rotations in M4 using the repre-sentation of the general Lorentz group in terms of antisymmetric 2-tensors [6].
As we have already seen in Sect. 2.10, the Lorentz group is the set ofall possible coordinate transformations in M4 associated with two Cartesian(orthonormal) frames {Ω, xα, cα} and {Ω′, x′α, c′α}. These are linear and in-homogeneous:
xα = Lαβx
′β + Tα ; (2.153)
the four coefficients Tα are arbitrary and represent space-time translationswhile the coefficients Lα
β ,
Lαβ =
∂xα
∂x′β, (2.154)
are associated with the orthonormality of the vectors cα and c′α:
cα · cβ = mαβ = c′α · c′β . (2.155)
The coefficients Lαβ characterize also the transformation laws of the unit
vectors of the two considered frames
c′β = Lαβcα , (2.156)
so that they can be interpreted as the coefficients of a 4-rotation L whichmaps the vectors cα into the vectors c′α:
c′β = Lcβ . (2.157)
The role of the two frames can be exchanged by moving simply the positionof the prime so that (2.153), (2.154) and (2.156) have their analogous:
⎧⎪⎨⎪⎩x′α = L′α
βxβ + T ′α (T ′α = −L′α
βTβ)
L′αβ =
∂x′α
∂xβ, cβ = L′α
βc′α.(2.158)
The matrices Lαβ and L′α
β are inverse of each other because of the identities:
δαβ =
∂x′α
∂x′β=∂x′α
∂xρ
∂xρ
∂x′β⇐⇒ L′α
ρLρβ = δα
β . (2.159)
Furthermore, the orthonormality properties (2.155) provide restrictions to thechange of basis (2.156), i.e. to the matrix Lα
β ; in fact, one has the followingten relations:
LραL
σβmρσ = mαβ (α, β = 0, 1, 2, 3) , (2.160)
so that (2.153) specify a group of coordinate transformations L10 with 10parameters: (16−10) = 6 for the Lα
β and 4 for the Tα. This is called Poincare

68 2 Space-Time Geometry and Relativistic Kinematics
group of the Minkowski spaceM4. In terms of changes of bases (2.156), (2.160)characterizes the orthogonal group L6 of M4. Two different points of view arethen possible, one associated with the orthogonal Cartesian coordinates of M4
and the other with the orthonormal frames of M4.Let us assume the basis cα to be fixed while the basis c′α as well as the
coefficients Lαβ of (2.156) to be allowed to vary. Among all numerical matrices
satisfying (2.160), there is the identity matrix:
Lαβ = δα
β , (2.161)
i.e. the rotation which leaves the initial basis as invariant. Such a rotationhas determinant +1, whereas a generic Lorentz matrix satisfies the condition(similar to that valid for a rotation in the ordinary space):
det ||Lαβ || = ±1 . (2.162)
Therefore, if one considers the Lαβ as continuous functions of a parameter
t ∈ (0, T ), with the initial condition Lαβ(0) = δα
β , it is not possible to obtainall the orthonormal bases {c′α} ∈ M4: those derived by applying to cα amatrix with determinant −1 are excluded. This also happens in the ordinaryspace where the rotation group (which depends on three parameters) is notconnected, but consists in two connected parts, O+ and O− (O stands fororthonormal); in fact
1. in both O+ and O−, there are only rotations with determinant +1 (equi-oriented bases: both left-handed or right-handed);
2. any two bases, one in O+ and the other in O−, are related by an anti-rotation: det ||Ri
k|| = −1 (non equi-oriented bases: one left-handed andthe other right-handed).
As stated above, in the case of M4, the connected parts become four:O+(C±3 ) and O−(C±3 ) because of the presence of the lightcone C3. In fact,C3 is a barrier not only between timelike (internal) and spacelike (external)vectors but also for the timelike vectors which cannot pass continuously froma half-cone to the other.
Alternatively, the condition that the orthonormal bases {cα} and {c′α} areequi-oriented, i.e. det ||Lα
β || = 1, does not imply the possibility to pass fromone to the other continuously: it is necessary to add the condition that thetwo timelike vectors c0 and c′0 belong to the same half lightcone. Thus, toremain in one of the four connected parts, O±(C±3 ), one must consider theset of all orthonormal bases O such that for each pair {cα}, {c′α} ∈ O thefollowing conditions hold:
1. c0 and c′0 belong to the same half lightcone;2. det ||Lα
β || = 1.
Assuming the above conditions, each of the four connected parts of M4 isendowed with equi-oriented orthonormal bases.

2.18 General Lorentz Transformations: II 69
2.18.1 Representation of the 4-Rotationswith Pairs of Spatial Vectors
Let us consider one of the four connected parts of the homogeneous Lorentzgroup. In this case, Lorentz transformations generate a continuous group oftransformations with six parameters: O6; in addition, for each pair of orthonor-mal bases {cα}, {c′α} ∈ O6, the timelike vectors c0 ≡ γ, c′0 ≡ γ′, belong tothe same half lightcone and specify two orthochronous Galilean frames: Sg andS′
g, having generic spatial triads {ci} and {c′i}. We note that one can alwaysconsider the special case of triads in x1-standard relation by performing anordinary rotation in Σ (the space platform associated with γ in Sg) and ananalogous rotation in Σ′ (the space platform associated with γ′ in S′
g). Moreprecisely, as we have seen in Sect. 2.10, denoting by u the relative velocity ofthe Galilean frame S′
g with respect to Sg, the following relations hold:
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
c′0 = ρ
(c0 +
1cu), ρ =
1√1− u2
c2
c′k = Rik
[ci +
ρ
cu · ci
(c0 +
ρ
c
u1 + ρ
)].
(2.163)
These relations involve six parameters: the three components of u ∈ Σ andthe three parameters corresponding to the spatial rotation R, such that
det ||Rik|| = 1 . (2.164)
Equation (2.163) can be cast into a more familiar form by using the rep-resentation of the ordinary rotations in terms of three parameters and, inparticular, in terms of a single vector q. In fact for an ordinary rotation R,we have the representation [1, 3]
v′ = Rv = v +2
1 + q2[q× v + q× (q× v)] , (2.165)
implying that the transformed vectors of ci ∈ Σ are given by
Δkdef= Ri
kci = ck +2
1 + q2[q× ck + q · ckq− q2ck)] . (2.166)
Introducing now the components of q along ck, q = qkck, as well as the spatialLevi–Civita alternating symbol
εilk = ci · cl × ck , (2.167)
we find the coefficients Rik
Rik = δi
k +2
1 + q2(qlεlk
i + qiqk − q2δik) ; (2.168)

70 2 Space-Time Geometry and Relativistic Kinematics
where Rikq
k = qi, i.e. q is an eigenvector of R; moreover, q specifies the rota-tion axis (with its direction) as well as the rotation angle (with its magnitude;in fact q = tan(φ/2) where φ is the angle of rotation). For example, whenq = tan(φ/2)c3, we find
Rik =
⎛⎝ cosφ − sinφ 0
sinφ cosφ 00 0 1
⎞⎠ . (2.169)
Similarly, using the decomposition u = uici, we also have Rikui = Δk · u.
Adopting such a notation allows us to rewrite (2.163) in a more compact form⎧⎪⎪⎨⎪⎪⎩
c′0 = ρ
(c0 +
1cu),
c′k = Δk +ρ
cΔk · u
(c0 +
ρ
c
u1 + ρ
).
(2.170)
Note that in the limit c→∞, (2.163) reduce to
c′0 = c0, c′k = Δk = Rikci . (2.171)
The components of the Lorentz matrix Lαβ are then given by
⎧⎪⎪⎨⎪⎪⎩L0
0 = ρ , Li0 =
ρ
cui
L0k =
ρ
cΔk · u , Li
k = ci ·Δk +1c2
ρ2
1 + ρuiΔk · u.
(2.172)
Let us focus, now, on the composition law for the product of two rotations. Infact, in addition to L : {cα} → {c′α} (characterized by the vectors q,u ∈ Σ)consider a second rotation: L′ : {c′α} → {c′′α} (characterized by the vectorsq′,u′ ∈ Σ′) which implies⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
c′′0 = ρ′(c′0 +
1cu′), ρ′ =
1√1− u′2
c2
c′′k = Δ′k +
ρ′
cΔ′
k · u′(c′0 +
ρ′
c
u′
1 + ρ′
), Δ′
k = Δk(q′),
(2.173)
whereu′ = u′ic′i , q′ = q′ic′i . (2.174)
The transformationL′′ = L′L (2.175)
directly maps the basis {cα} into {c′′α} and can be represented by relationsanalogous to (2.170) with both the vectors q′′,u′′ ∈ Σ, namely,

2.18 General Lorentz Transformations: II 71
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
c′′0 = ρ′′(c0 +
1cu′′), ρ′′ =
1√1− u′′2
c2
c′′k = Δ′′k +
ρ′′
cΔ′′
k · u′′(c0 +
ρ′′
c
u′′
1 + ρ′′
), Δ′′
k = Δk(q′′).
(2.176)
The vectors q′′,u′′ ∈ Σ are functions of q,u ∈ Σ and q′,u′ ∈ Σ′; such arelation thus represents the composition law of two 4-rotations. Note that thislaw can also be obtained directly in terms of the vector q only, exactly asthe composition law of the product of two ordinary rotations (or Rodriguesformula, see [3], p. 113):
q′′ =q + q′ + q′ × q
1− q′ · q . (2.177)
A similar relation (with the only difference of a + sign at the denominatorof (2.177)) holds in the three-dimensional hyperbolic case, with signature:−,+,+.
In the case of a Minkowski space-time, we find convenient to generalize(2.177) using the representation of 4-rotations L in terms of antisymmetric2-tensors. This is quite natural since an antisymmetric 2-tensor is equivalentto a pair of spatial vectors, as for the case of the electromagnetic tensor, whichcan be represented in terms of the electric and magnetic vector fields.
Later we will briefly introduce another method, based on Clifford’s algebra[7] and also associated with antisymmetric tensors. We thus proceed nowanalyzing the general properties of antisymmetric 2-tensors in M4 [8].
2.18.2 Invariants of an Antisymmetric 2-Tensor
Let us consider a four-dimensional linear space E4, and let A be a contravari-ant antisymmetric 2-tensor, i.e. A ∈ E4 ∧ E4
A =12Aαβeα ∧ eβ , (2.178)
where {eα} is a generic basis in E4.14 Due to a general property (see [1],p. 53), the tensor A
(1) is a bivector: A = u ∧ v,or(2) it can be expressed (in infinite ways) as the sum of two bivectors:
A = A1 + A′1 , A1 = v0 ∧ v1 , A′
1 = v2 ∧ v3 , (2.179)
14 As a standard notation, we use bold face letters to denote tensors (noncapitalletters for vectors mainly). The vectorial map associated with the mixed repre-sentation of a 2-tensor is denoted by the same (capital) letter as for the tensorbut is not in bold face.

72 2 Space-Time Geometry and Relativistic Kinematics
where vα (α = 0, 1, 2, 3) are four linearly independent vectors: v0 ∧ v1 ∧ v2 ∧v3 ≡ V �= 0. In case 2), assuming the (ordered) set of vectors vα as a basisin E4, the components of A with respect to such a basis are
Aμν =
⎛⎜⎝
0 1 0 0−1 0 0 00 0 0 10 0 −1 0
⎞⎟⎠ ,
and det ||Aμν || = 1. Moreover, because of the tensorial behaviour of the com-ponents Aμν , the sign of this determinant is invariant under a change of basis,i.e. it does not depend on the choice of the basis. Hence, it is always positivefor every A which is not a bivector. Therefore, for every contravariant (orcovariant) antisymmetric 2-tensor of the form (2.179) we have
det ||Aμν || ≥ 0 , (2.180)
where the equality holds if and only if A is a bivector.The above property holds, in particular, if E4 ≡M4. In this case, denoting
the metric tensor as gαβ (generically), one can consider the various forms of thetensor A: covariant (Aαβ), contravariant (Aαβ) and mixed (Aα
β = gβρAαρ),
the latter identifying the vectorial map A. One can then consider the fourinvariants of A:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
I1(A) = Aαα = Tr A = 0
I2(A) =12δρσαβA
αρA
βσ = −1
2Aα
ρAρ
α = −12I1(A2)
I3(A) =13!δρσναβμA
αρA
βσA
μν = 0
I4(A) = det ||Aαβ || = g det ||Aαβ ||,
(2.181)
where δβ1...βkα1...αk
is the generalized Kronecker tensor introduced in (2.125). Equa-tion (2.181)4 together with (2.180) implies that, if A is nondegenerate, I4(A)has the sign of the determinant of the space-time metric g; in particular, as-suming the basis {vα} used to represent the bivectors A1 and A′
1 in (2.179)instead of {eα}, leads to I4(A) = g implying then I4(A) ≤ 0 in M4. Due to theinvariant property of I4(A), this result specifies its geometrical meaning. Infact, generically V = v0∧v1∧v2∧v3 is associated with its absolute extensionVA, defined by the positive invariant:
V 2A
def=14!|VαβρσV
αβρσ| , V αβρσ = δαβρσμντε v
μ0 v
ν1v
τ2v
ε3 , (2.182)
as well as its extension relative to a frame {eα}, VR:
VRdef= det ||vα
μ|| , vμ = vαμeα ; (2.183)

2.18 General Lorentz Transformations: II 73
VR then is related to VA by the property
V 2A = V 2
R|g| = inv. = | det ||vα · vβ || | , (2.184)
invariant with respect to the choice of the basis {eα}. When {eα} ≡ {vα}, wefind VR = 1 and, using (2.181)4 and (2.184), we see that both scalars |I4(A)|and V 2
A assume the same value |g|; hence, they coincide: |I4(A)| = V 2A, and V
can then be written as
V = v0 ∧ v1 ∧ v2 ∧ v3 = A1 ∧A′1 ≡
12A ∧A . (2.185)
Let us define the (pseudoscalar) invariant∗I (A):
[∗I (A)]2 def= −I4(A) ≥ 0 . (2.186)
We have[∗I (A)]2 = V 2
A ; (2.187)
moreover, denoting by ∗V the dual of V (odd-type scalar):
∗V =14!ηαβρσV
αβρσ , (2.188)
we have in addition∗V 2 = −V 2
A , (2.189)
so that (2.187) is also equivalent to
∗I (A) = ∗V . (2.190)
2.18.3 Algebraic Properties of Antisymmetric 2-Tensors
From (2.178) we have
V =18AαβAρσeα ∧ eβ ∧ eρ ∧ eσ ≡
4!8A[αβAρσ]eα ⊗ eβ ⊗ eρ ⊗ eσ ,
so that the components of V are given by
V αβρσ = 3A[αβAρσ] , (2.191)
and we find
∗V ≡ 14!ηαβρσV
αβρσ =18ηαβρσA
[αβAρσ] =18ηαβρσA
αβAρσ . (2.192)
Using then the dual of A
∗A =
12∗Aαβeα ∧ eβ ,
∗Aαβ =12ηαβ
ρσAρσ , (2.193)

74 2 Space-Time Geometry and Relativistic Kinematics
is easy to prove the additional property of∗I (A):
∗I (A) =
14∗AαβA
αβ = −14I1(A
∗A) . (2.194)
∗I (A) characterizes the product of A and
∗A (see [9], p. 588):
∗AA = −
∗I (A)A0 A0 ≡ I ; (2.195)
moreover, since∗I (A) is a symmetric function of A and
∗A, we also have
A∗A =
∗AA = −
∗I (A)A0 . (2.196)
From this equation, taking the determinant of both sides, it follows
I4(A)I4(∗A) = [
∗I (A)]4 ,
and (2.186) becomes
I4(A) = I4(∗A) = −[
∗I (A)]2 . (2.197)
A second property of∗I (A) follows from (2.196). In fact, replacing A by A+B
in (2.196) leads to
(A+B)(∗A+
∗B) = −
∗I (A+B)A0 ;
the left-hand side of this equation can be cast in the form
A∗A+A
∗B +B
∗A+B
∗B =
14I1(A
∗A)A0 +A
∗B +B
∗A+
14I1(B
∗B)A0
while at the right-hand side we have
∗I (A+B) = −1
4
[I1(A
∗A) + I1(B
∗B) + 2I1(A
∗B)]. (2.198)
Therefore we findA
∗B +B
∗A =
12I1(A
∗B)A0 , (2.199)
i.e. a relation equivalent to (2.166), to which it reduces when A = B. Next,replacing
∗B by B and B by −
∗B (being ∗∗ = −1, as shown in Sect. 2.17),
(2.199) becomes
AB −∗B
∗A =
12I1(AB)A0 ; (2.200)
multiplying this equation by AB and using (2.196), we can express the squareof AB as a linear function of the same AB:
(AB)2 =∗I (A)
∗I (B)A0 +
12I1(AB)AB . (2.201)

2.18 General Lorentz Transformations: II 75
We note that when B = A, using (2.181) and (2.197), (2.201) gives theHamilton–Cayley identity for antisymmetric 2-tensors:
A4 = −I4(A)A0 − I2(A)A2 . (2.202)
Multiplying (2.200) by A we have
ABA =12I1(AB)A−
∗I (A)
∗B ; (2.203)
when B = A, the latter allows us to obtain A3 in terms of A and∗A:
A3 = −I2(A)A−∗I (A)
∗A . (2.204)
Equations (2.199) and (2.200) together with (2.201) imply simple propertiesfor the Poisson brackets [A,B]:
[A,B] ≡ AB −BA , (2.205)
which give the structure of a Lie algebra to the (Euclidean) space of antisym-metric 2-tensors Λ2 = M4 ∧M4. For instance, from (2.199), with A = B andB = −
∗A, we have: A
∗B +B
∗A =
∗BA+
∗AB, that is
[A,∗B] = [
∗A,B] . (2.206)
Similarly, from (2.200), rewritten also exchanging A with B, one finds
[A,B] = −[∗A,
∗B] . (2.207)
Finally, we have∗[A,B] = [A,
∗B] = [
∗A,B] ; (2.208)
the parenthesis [A,∗A], instead, vanishes identically.
Therefore, two independent antisymmetric 2-tensors:A andB together with∗A,
∗B, [A,B] and ∗[A,B] form a basis in the linear space Λ2.
2.18.4 Bivectors and Their Classification
The properties of antisymmetric 2-tensors outlined in the previous section donot imply any special requirement for A and B. However, it is convenientto distinguish between the general case: I4(A) �= 0 and the degenerate one:I4(A) = 0.
The decomposition (2.179) suggests to study the general case starting frombivectors. To this end, let us consider the bivector A = u ∧ v, with u and vindependent and defining a linear subspace E2 ≡< u,v >; let us denote byAαβ = uαvβ − uβvα the components of A with respect to the basis {eα⊗ eβ}

76 2 Space-Time Geometry and Relativistic Kinematics
of M24 ; equivalently, Aαβ are the contravariant coefficients of the linear map
associated with A which maps each vector w ∈M4 into a vector Aw given by
Aw = (v ·w)u− (u ·w)v , (2.209)
belonging to E2 (principal plane) and orthogonal to w: Aw ·w = 0; thus, Awhas the direction of the intersection between E2 and the hyperplane orthogonalto w. The exception is represented by those vectors orthogonal to E2, whichbelong to the kernel of A: Aw = 0, ∀w ⊥ E2.
Since AM4 = E2, all possible (real) eigendirections of A belong to E2.Furthermore, I4(A) = 0, since A is a bivector. The eigenvalue equation isthen given by
det ||Aαβ − λδα
β || ≡ λ2[I2(A) + λ2] = 0 , (2.210)
and admits, besides the double root λ = 0 (the vectors of the 2-plane normalto E2 are all in the kernel of A), the roots of the equation
I2(A) + λ2 = 0 , (2.211)
where I2(A) is given by
I2(A) = ||u|| ||v|| − (u · v)2 . (2.212)
Let us now assume, without loss of generality, that the basis {eα} is adaptedto E2: ei ∈ E2 (i = 0, 1); denoting by V the extension of A with respect toe0 ∧ e1, we have
I2(A) = VgA , gA = det ||ei · ek|| = ||e0|| ||e1|| − (e0 · e1)2 . (2.213)
We distinguish then the following three cases:
1. gA > 0 ∼ I2(A) > 0: the signature of E2 is (++), i.e. E2 is ellip-tic, and there are not null directions; (2.211) has no real solutions and,consequently, in E2, there are no real eigendirections.
2. gA < 0 ∼ I2(A) < 0: the signature of E2 is (−+), i.e. E2 is hyperbolic.Besides the double root λ = 0, there are two different real eigenvalues: λ =±√−I2(A), and hence there exist in E2 two independent eigendirections:
u1 and u2. One then has
u ∧ v = hu1 ∧ u2 , (2.214)
where h is the signed extension of the parallelogram (u,v) with respectto (u1,u2). Then, from (2.209) follows that
Aw = h[(u2 ·w)u1 − (u1 ·w)u2], ∀w ∈M4 , (2.215)
so that
Au1 = h[(u2 · u1)u1 − (u1 · u1)u2],Au2 = h[(u2 · u2)u1 − (u1 · u2)u2] , (2.216)

2.18 General Lorentz Transformations: II 77
and, since u1 and u2 are the eigendirections of A (Au1 parallel to u1 andAu2 parallel to u2), we have that u1 · u1 = 0 and u2 · u2 = 0, i.e. u1
and u2 are necessarily the two isotropic directions of E2; the associatedeigenvalues λ are given by λ = ±(hu1 ·u2), in agreement with (2.213). Inparticular, if u1 and u2 satisfy the normalization condition u1 · u2 = 1(which still leaves u1 and u2 defined up to a factor), one has λ = ±h.
3. gA = 0 ∼ I2(A) = 0: (2.211) has the double root λ = 0. The vectors of E2
cannot have positive (negative) norm, because in such a case, gA wouldbe positive (negative) too. Thus, there necessarily exists a null vector u.Assuming that one of the vectors ei coincides with u, we see, from (2.213),that u is orthogonal to all the vectors of E2. Moreover, it is unique, upto a factor: if there were another one, u1, not collinear with u, then, from(2.215) with h = 0, one would have Aw = 0, ∀w, i.e. A = 0, contrarilyto the hypothesis.
Let s ∈ E2 be a generic vector orthogonal to u and, hence, with nonzeronorm. The normal (with respect to E2) not degenerate hyperplane: Π, con-tains u and has signature (−++); as a consequence, besides the isotropicdirection, E2 only contains spatial vectors: ||s|| > 0.
Actually, one still has a relation similar to (2.215):
Aw = h[(s ·w)u− (u ·w)s] ,
which ∀w ∈ E2 becomes
Aw = h(s ·w)u , ∀w ∈ E2 .
Thus, each vector w ∈ E2 is mapped into a vector parallel to u, i.e. alongthe only null direction of E2. In fact, the condition Aw = h(s ·w)u = 0,with w ∈ E2, is equivalent to s ·w = 0, that is, w parallel to u. Note thatE2 cannot have orthonormal bases: otherwise the signature should havebeen (++); moreover, every orthogonal basis of E2 necessarily containsthe null direction u.
Therefore E2 is parabolic as well as the orthogonal 2-plane which con-tains u (the isotropic vector) and the null directions of A, as in the abovecases 1 and 2.
We can now discuss some orthogonality properties of antisymmetric 2-tensors.
Let A ≡ (Aαβ) and B ≡ (Bαβ) be two antisymmetric 2-tensors; the invari-ant
A ·B def= AαβBαβ = −I1(AB) (2.217)
is called the scalar product of A and B. When A ·B = 0, the two tensors aresaid orthogonal. We have that if A is a bivector, then its dual
∗A is a bivector
orthogonal to A:
I4(A) = 0 → I4(∗A) = 0 and A ·
∗A = 0 . (2.218)

78 2 Space-Time Geometry and Relativistic Kinematics
This follows directly from (2.196) and (2.197). The orthogonality property ofthe bivectors A and
∗A is equivalent to the orthogonality of the two subspaces
E2 and E∗2 , to which they belong, respectively. To see this let A = u ∧ v;
because of the independence of u and v, we have that a vector w is orthogonalto the plane E2 ≡< u,v > associated with A if and only if Aw = (v ·w)u−(u ·w)v = 0. Moreover, using the antisymmetry of the Ricci tensor η and thesymmetry of the tensor uαuβ , it follows that
∗Aαβuβ = ηαβρσuβuρvσ = 0 , ∗Aαβvβ = ηαβρσvβuρvσ = 0 ,
that is∗Au = 0 and
∗Av = 0. Thus u and v are orthogonal to the subspace E∗
2
associated with∗A; as u and v span the subspace E2 associated with A, we
also have the orthogonality of E2 and E∗2 .
As a consequence of the uniqueness of the orthogonal 2-plane to a givenbivector A = u∧v,15 it follows that, if A and B are bivectors associated withorthogonal subspaces, necessarily one has B = λ
∗A, with λ a factor.
Note that (2.218) is contained in (2.196) which for bivectors assumes theform A
∗A = 0; similarly, from (2.201), the orthogonality of two bivectors A
and B is equivalent to the condition AB = 0.
2.18.5 Canonical Decomposition of Antisymmetric 2-Tensors
Let us consider a generic antisymmetric 2-tensor A, i.e. such that
I4(A) = I4(∗A) = −[
∗I (A)]2 < 0 . (2.219)
In this case, the associated map admits an inverse: A−1, and because of(2.196), for the (left) inversion and (left) duality operation, the following re-lation holds: ∗
A = −∗I (A)A−1 , (2.220)
so that the adjoint (or dual) map differs from the inverse by the factor:
−∗I (A) =
14I1(A
∗A) . (2.221)
We find then the following commutation property
∗A−1 = [
∗A ]−1 . (2.222)
We note that for bivectors (2.222) as well as the original (2.220) is meaningless.The following relation between
∗A and the complementary map of A: RA,
defined by15 When A is parabolic, the uniqueness remains, but the 2-plane orthogonal to E2
is not supplementary because it contains, like E2, the isotropic direction of A.

2.18 General Lorentz Transformations: II 79
(RA)T def=∗I (A)
∗A , (2.223)
has, instead, a general validity. Equation (2.223) reduces to (2.220) in thegeneral case I4(A) < 0; for bivectors, instead, the complementary map alwaysvanishes, differently from
∗A.
Let us turn to the decomposition (2.179) of A as the sum of two bivec-tors. We have that A can always be expressed as the sum of two orthogonalbivectors, that is the following canonical decomposition holds:
A = A1 + A′1, A1 ·A′
1 = 0 , (2.224)
and it is unique. To show this let us assume the decomposition (2.224) anduse the orthogonality property of A1 and A′
1; we then have for the associatedmaps (see Sect. 2.18.4)
A′1 = λ
∗A1 , A1 = λ′
∗A1
′ , λλ′ = −1 ;
thus the decomposition (2.224) becomes
A = A1 + λ∗A1 = A′
1 + λ′∗A1
′ , (2.225)
where the pair (A1, λ) determines A up to the transformation
A′1 = λ
∗A1 , λ′ = −1/λ . (2.226)
Consider now the dual of both sides of (2.225), and take into account that,for each antisymmetric 2-tensor in M4, one has ∗∗A = −A. Therefore, one hasthe relation: λ
∗A = λ
∗A1−λ2A1 which, once subtracted from (2.225), gives A1
(as well as A′1) in terms of A and λ:
A1 =1
1 + λ2(A− λ
∗A) , A′
1 =λ
1 + λ2(∗A+ λA) . (2.227)
Equation (2.227) is not yet the solution because we must require that A is abivector. To do this, it is enough to impose I1(A1
∗A1) = 0 and use (2.227), so
thatI1(A
∗A+ λA2 − λ
∗A
2− λ2
∗AA) = 0 .
From this relation, using (2.194), (2.181)2 and (2.200) with B = A,⎧⎨⎩I1(A
∗A) = I1(
∗AA) = −4
∗I (A),
I1(A2) = −2I2(A) , I1(∗A
2) = −I1(A2),
(2.228)
we obtain the equation for λ:
∗I (A)λ2 − I2(A)λ −
∗I (A) = 0 . (2.229)

80 2 Space-Time Geometry and Relativistic Kinematics
If∗I (A) = 0, (2.229) then implies λ = 0, in agreement with the fact that A is
a bivector; if, instead,∗I (A) �= 0, it admits the two roots:
λ1,2 =1
2∗I (A)
[I2(A)±
√I2(A)2 + 4[
∗I (A)]2
], λ1λ2 = −1 . (2.230)
Apart from the degenerate case, and using for λ any of the values (2.230),(2.227) gives the sought for bivectors A1 and A′
1 of the canonical decompo-sition (2.224). We note that exchanging the two roots λ1 and λ2 given by(2.230) leaves A invariant, and it is equivalent to exchanging A1 with A′
1 in(2.227).
Let us study now the relation between the invariants of A and those of A1
and A′1. We recall that for 2-tensors B and C we have
I2(B + C) def=12δρσαβ(Bα
ρ + Cαρ)(Bβ
σ + Cβσ)
= I2(B) + I2(C) + I1(B)I1(C)− I1(BC) . (2.231)
Using now B = A1 and C = A′1 (antisymmetric orthogonal bivectors)
together with (2.224), the previous relation becomes
I2(A) = I2(A1) + I2(A′1) = −1
2I1(A2
1)−12I1(A′2
1 ) .
In order to evaluate I4(A), one has to consider instead the odd-type scalar∗I (A) of (2.194):
∗I (A) = −1
4I1(A
∗A) = −1
2I1(A1
∗A′
1) = λI1(A21) ,
that is,∗I (A) = −λI2(A1) . (2.232)
Similarly, exchanging A1 with A′1, one finds
∗I (A) = −λ′I2(A′
1); thus, sinceλλ′ = −1, we can write
∗I (A)2 ≡ −I4(A) = −I2(A1)I2(A′
1) . (2.233)
Summarizing, the relations between the invariants of A and those of itsorthogonal components A1 and A′
1 are
I2(A) = I2(A1) + I2(A′1) , I4(A) = I2(A1)I2(A′
1) . (2.234)
Equation (2.234) confirms the negativity of I4(A), since of the two bivectorsA1 and A′
1 one is elliptic (I2 > 0) and the other is hyperbolic (I2 < 0).

2.18 General Lorentz Transformations: II 81
Equation (2.234) also shows that the sum of two orthogonal parabolic bivec-tors is still a parabolic bivector; moreover, using (2.233) and (2.232), one hasthe following expression for λ2:
λ2 = −I2(A′1)
I2(A1). (2.235)
2.18.6 Properties of a 4-Rotation
The spectral analysis of antisymmetric tensors which we have discussed abovewill be now applied to 4-rotations. We start studying the representation of theLorentz group in terms of antisymmetric 2-tensors, i.e. the so-called canonicaldecomposition. Thought of as a linear map of vectors, a 4-rotation is a vectorvalued function: L ≡ ||Lα
β || satisfying the following properties:
1. it maintains the scalar product of any two vectors: Lu · Lv = u · v,∀u,v ∈M4;
2. it leaves unchanged the orientation of M4, that is it maps each basis{eα} ∈M4 into another one with the same orientation.
From the property (1), using the commutation theorem, one gets the con-dition (KL)L = L0 where (KL) = LT is the conjugate map of L. Takingthe fourth invariant of both sides, and using the property (2), one then getsI4(L) = 1. Conversely, the latter two conditions imply 1 and 2. Thus,16 nec-essary and sufficient condition for a generic L to be a rotation is
(KL)L = L0 , I4(L) = 1 . (2.236)
Let us now introduce the complementary map of L, (RL):
(RL) = I4(L)(KL)−1 . (2.237)
From (2.236), after left multiplication by (KL)−1 and using (2.236)2, wefind L = (RL); conversely, such equality which reduces (2.237) to the formL = I4(L)(KL)−1 implies (KL)L = I4(L)L0, so that [I4(L)]2 = [I4(L)]4.Therefore, necessary and sufficient condition for L to be a rotation is
(RL) = L , I4(L) > 0 . (2.238)
It is easy to obtain a relation between the first and the third invariant of arotation. In fact, using the Hamilton–Cayley identity (2.136) and (2.236)2,one finds
L−1 = I3(L)L0 − I2(L)L+ I1(L)L2 − L3 , (2.239)
as well as the following expression for (RL):
(KL)−1 ≡ (RL) = I3(L)L0 − I2(L)(KL) + I1(L)(KL)2 − (KL)3 ; (2.240)16 This is a general property, well known in the ordinary case.

82 2 Space-Time Geometry and Relativistic Kinematics
then, evaluating the first invariant of both sides17: I1(RL) = I3(L) and, from(2.238)1,
I1(L) = I3(L) . (2.241)
2.18.7 Expression of a 4-Rotation by Its Antisymmetric Part
In the three-dimensional case, every rotation can be expressed as second de-gree polynom in its antisymmetric part. We look for an analogous propertyin the four-dimensional Euclidean space, with signature (− + ++). Let usdecompose L in the sum of its symmetric part D (i.e. a “dilation map”) andits antisymmetric part A (i.e. an “axial map”):
L = D +A . (2.242)
Using (2.236)1 with L given by (2.242) as well as the analogous L(KL) = L0,one has
D2 −AD +DA−A2 = L0 , D2 +AD −DA−A2 = L0 ,
from whichD2 = A0 +A2 , DA = AD . (2.243)
We have thus expressedD2 as a function of A; however, our aim18 is to expressD as a function of A. Solving (2.239) with respect to L3 and using (2.236)1,L−1 = (KL) = D −A, together with (2.241) leads to
L3 = I1(L)L2 − I2(L)L−KL+ I1(L)L0 ;
using the representation of L given by (2.242) and taking into account (2.243)2then implies
D3 + 3D2A+ 3DA2 +A3 = I1(L)(D2 + 2DA+A2) +−I2(L)(D +A)−D +A+ I1(L)L0 ;
separating the antisymmetric and symmetric parts, we have⎧⎨⎩D3 + 3DA2 = I1(L)(L0 +D2 +A2)− [1 + I2(L)]D
3D2A+A3 = 2I1(L)DA+ [1− I2(L)]A,
so that taking into account (2.243)1 leads to⎧⎨⎩D[(2 + I2(L))A0 + 4A2] = 2I1(L)(A0 +A2) ≡ 2I1(L)D2
3A+ 4A3 = 2I1(L)DA+ [1− I2(L)]A.
17 As stated in Sect. 2.17, for any nondegenerate map t, we have I1(Kt) = I1(t).18 Equations (2.243) are necessary condition for L being a 4-rotation; but they
are not sufficient because they only represent the first of the two characteristicproperties (2.236).

2.18 General Lorentz Transformations: II 83
Introducing then the “dilation map” Bdef= [2 + I2(L)]A0 + 4A2 − 2I1(L)D
(satisfying the condition B = KB) and using (2.243)2, the above relationscan be written as
DB = 0 , AB = 0 . (2.244)
Moreover, from the definition of B, we have the additional condition
D2B −A2B = B;
the left-hand side of this equation vanishes identically, being D(DB)−A(AB)and using the conditions (2.244). Thus necessarily we have B = 0, and this isexactly the sought for relation for D:
2I1(L)D = [2 + I2(L)]A0 + 4A2 . (2.245)
In the general case I1(L) �= 0, (2.245) gives D in terms of A:
D = aA0 + bA2 , (2.246)
where the scalars a and b are expressed in terms of invariants of L, insteadof A:
a =2 + I2(L)2I1(L)
, b =2
I1(L)�= 0 . (2.247)
2.18.8 Canonical Form of 4-Rotations
Equation (2.246) allows us to write L in the form
L = aA0 +A+ bA2 , (2.248)
with a and b given by (2.247). Our purpose is now to express a and b in termsof the invariants of A. From (2.248) we have
I1(L) ≡ 2b
= 4a− 2bI2(A) ,
that isI2(A) = 2
a
b− 1b2, (2.249)
or equivalently
I2(A) =12[2 + I2(L)]− 1
4I21 (L) . (2.250)
Moreover, (2.248) gives the product (KL)L, using the Hamilton–Cayley iden-tity to express A4:
A4 = −I2(A)A2 − I4(A)A0 , (2.251)
that is(KL)L = [a2 − b2I4(A)]A0 + [2ab− 1− b2I2(A)]A2 .

84 2 Space-Time Geometry and Relativistic Kinematics
Thus, from (2.236)1 and (2.249), we have the relation:
L0 = [a2 − b2I4(A)]A0,
so that
I4(A) =a2 − 1b2
(2.252)
or
I4(A) =116{[2 + I2(L)]2 − 4I2
1 (L)}. (2.253)
Moreover, (2.186), I4(A) ≤ 0, gives the following restriction to the invariantsof L:
− 1 ≤ a ≤ 1 ∼ [2 + I2(L)]2 ≤ 4I21 (L) , (2.254)
with the equality sign holding only if A is a bivector.Equations (2.249) and (2.252) give, even if not uniquely, the scalars a and
b in terms of the invariants of A. In fact, from (2.252) we have
1b2
=a2
b2− I4(A) ;
substituting this expression in (2.249) leads to the second degree equationin a/b:
a2
b2− 2
a
b− I4(A) + I2(A) = 0 .
Consequently,a
b= 1 + ε
√D , ε = ±1 , (2.255)
where D is given by
D def= 1− I2(A) + I4(A) ≡ 116
[2− I2(L)]2 ≥ 0 , (2.256)
and it is nonnegative because of (2.250) and (2.253). As we will see later, thisis the only restriction to A, in order that the right-hand side of (2.248) be arotation. Once the ratio a/b is determined, (2.249) gives the expression of b,and then, from (2.255), we get the expression of a:
a = ε′1 + ε
√D√
2(1 + ε√D)− I2(A)
, b =ε′√
2(1 + ε√D)− I2(A)
. (2.257)
We note that from (2.256) follows the identity
2(1 + ε√D)− I2(A) ≡ (1 + ε
√D)2 − I4(A) ;
thus, the radicand in (2.257) is nonnegative for each A and vanishes only whenε = −1, I4(A) = 0, I2(A) = 0.

2.18 General Lorentz Transformations: II 85
2.18.9 Simple Rotations
A 4-rotation L is called simple if its antisymmetric part A is a bivector:A = u∧v, or I4(A) = 0. From (2.252), we have then a2 = 1, or a = ε′, whereε′ = ±1 and b is given by (2.255) (or from (2.257), when I4(A) = 0):
a = ε′ , b =ε′
1 + ε√
1− I2(A), ε, ε′ = ±1 .
As a consequence of the arbitrariness of A, we have the following represen-tation of simple rotations in M4:
L = ε′(A0 +A+
A2
1 + ε√
1− I2(A)
), (2.258)
which recalls the three-dimensional hyperbolic case: ε′ = 1 (see [1]).If the principal plane associated with the bivector A: E2 =< u,v > is
elliptic: I2(A) > 0 and from the constraint (2.256), one obtains the condition:
I2(A) ≤ 1 ; (2.259)
the rotation is thus said of elliptic type and denoted by Le; it is said of hy-perbolic type, instead, when I2(A) < 0 and of parabolic type when I2(A) = 0.Let us start considering the first two cases: I2(A) �= 0. We recall that A mapseach vector w ∈M4 in a vector of E2: Aw = (w · v)u− (w · u)v. Thus, eachvector belonging to E′
2 (the plane orthogonal to E2) is mapped into the zeroelement. From (2.258) we also have
Lw = ε′w , ∀w ∈ E′2 , (2.260)
that is, any vector orthogonal to E2 is fixed, or mapped by L into the opposite,according to the value of ε′ = ±1.
Let us see, now, how L acts on the elements of E2. Since A maps anyvector w ∈ E2 in a vector orthogonal to this plane, then A2w has the originaldirection. Actually, using (2.204) with I4(A) = 0, for all the vectors of E2 wehave
A2w = −I2(A)w , ∀w ∈ E2 . (2.261)
Thus, substituting in (2.258), we find (only for vectors in E2):
L = ε′(ε√
1− I2(A)A0 +A) . (2.262)
Let us now assume that E2 is of elliptic type, i.e. with signature (++); inthis case, A does not admit (real) eigendirections.19 Taking into account theorthogonality condition: Aw ·w = 0, ∀w ∈ E2, and using (2.262) leads to19 In order w be an eigendirection of A, Aw must be aligned with w, but from the
properties of A, we have that Aw is orthogonal to w. In an elliptic 2-space, it isnot possible to satisfy both these conditions, and hence A does not admit (real)eigendirections.

86 2 Space-Time Geometry and Relativistic Kinematics
Lw ·w = εε′√
1− I2(A)||w|| ; (2.263)
that is, the following invariant property holds:
Lw ·w||w|| = inv. = ε′ cosϕ , ∀w ∈ E2 , (2.264)
where ϕ, implicitly defined by the relation:
cosϕ = ε√
1− I2(A) , 0 < I2(A) ≤ 1 (2.265)
is independent of w and defines the amplitude of the rotation: 0 < ϕ < π. Thisis an effective rotation; in fact, since E2 is elliptic, I2(A) > 0, both the nullrotation and the symmetry, ϕ = 0, π, are excluded. Thus, L does not admiteigendirections in E2, but only in E′
2 (rotation axis) (Fig. 2.1).If the subspace E2 is instead hyperbolic (I2(A) < 0), one should add the
two isotropic directions of E2 (which are now eigendirection of A) to theeigendirections of E′
2 (now of elliptic type); the rotation will be said to behyperbolic of the first kind, L+
h , or of the second kind: L−h , corresponding to
the values ε = −1 and ε = 1 respectively, in the case ε′ = 1 and conversely inthe case ε′ = −1 (Fig. 2.2).
Moreover, in a hyperbolic subspace E2, the Schwartz inequality gives
(a · b)2 ≥ ||a|| ||b|| , ∀a,b ∈ E2 ,
with the equality sign holding only when a and b are collinear. As a conse-quence, in each of the four regions in which E2 is divided by the isotropic
''Axis'' E'2
Lww
ϕ
E2
Fig. 2.1. Rotations in an elliptic space

2.18 General Lorentz Transformations: II 87
''Axis''
Lw
w'
Lw'
Ψ
ε = 1ε = –1
ε' = 1ε' = –1
E2w
II > 0
III < 0
I < 0
IV > 0
Fig. 2.2. Rotations in a hyperbolic space
directions, it is possible to define the pseudoangle ψ ≥ 0 of the two vectors aand b. Hence, in each of the four regions, the sign of the scalar product a · bis invariant: in the temporal regions I and III (see Fig. 2.2), a · b < 0, whilea · b > 0 in the spatial regions II and IV. So the pseudoangle ψ is uniquelydefined by the relations:⎧⎪⎪⎨
⎪⎪⎩coshψ def= −a · b
ab, in regions I and III
coshψ def=a · bab
, in regions II and IV(2.266)
and ψ = 0 only for b = λa with λ > 0.

88 2 Space-Time Geometry and Relativistic Kinematics
Equations (2.262) imply that (2.264) in the hyperbolic case becomes
Lw ·wεε′||w|| = inv. = coshψ , ∀w ∈ E2, ε, ε′ = ±1 , (2.267)
where ψ, implicitly defined by the relation
coshψ =√
1− I2(A) , I2(A) < 0 , (2.268)
represents the pseudoamplitude of the rotation.When ε = 1 and ε′ = 1, the four regions of E2 are invariant for L:
Lγ · γ = − coshψ < 0 , ∀γ ∈ I, III, γ = unit vector,
etc. Thus, the half lightcones are conserved; for ε′ = 1 and ε = −1, the regionsI and III as well as II and IV (and also the half lightcones) are exchanged,similarly for ε′ = −1.
We note that a hyperbolic rotation L admits basis of eigenvectors, differ-ently from the elliptic case in which only the vectors in a plane are eigen-vectors. These are formed with two isotropic vectors in E2 and two arbitrary(noncollinear) vectors of E′
2.
L = ε′(A0 +A+
12A2
). (2.269)
Finally, if I2(A) = 0, the rotation is of parabolic type (Fig. 2.3); it does notadmit eigendirections in E2 besides the isotropic one, say l, belonging to boththe orthogonal and parabolic 2-planes E2 and E′
2. This is a very special case,since the amplitude of the rotation is independent of L. In fact, from (2.269),for each w ∈ E2, the transformed vector Lw is given by
Lw = ε′w + ξl , ∀w ∈ E2 ; (2.270)
l
E'2
E2
w
Fig. 2.3. Rotations in a parabolic space

2.18 General Lorentz Transformations: II 89
thus the ratioLw ·w||w|| is independent of L (and of w):
Lw ·w||w|| = ε′ , ∀w ∈ E2 . (2.271)
Hence, apart from the factor ε′ = ±1 and the existence of a whole rotation2-plane (instead of an axis), the situation for what concerns simple rotationsis analogous to that of the three-dimensional case.
2.18.10 4-Rotations as Product of Simple Rotations
Let us turn to the case of a generic rotation: I4(A) �= 0, decomposing A asthe sum of two orthogonal bivectors: A = A1 + A′
1, with A1 · A′1 = 0. We
assume A1 of elliptic type,20 so that A′1 is necessarily hyperbolic. With each
of the two bivectors is associated a simple rotation, like in (2.258). We canshow now that L is always given by the product of two of such rotations.
Let us start noting that (2.234) imply:
D = (1− I2)(1 − I ′2) , (2.272)
where we have introduced the notation
I2 = I2(A1) < 1 , I ′2 = I2(A′1) < 0 . (2.273)
We then have
2(1 + ε√D)− I2(A) = (ε
√1− I2 +
√1− I ′2)2 > 0 , (2.274)
and the following expressions for a and b:
a =1 + hh′
h+ h′, b =
1h+ h′
, (2.275)
whereh = ε
√1− I2 , h′ = ε′
√1− I ′2 . (2.276)
Rewriting a, using (2.275)1
a = 1 +(1− h)(1− h′)
h+ h′
we find that (2.248) can be written as:
L = A0 +A+(1− h)(1 − h′)
h+ h′A0 +
A2
h+ h′. (2.277)
20 If A1 is parabolic, then A′1 is parabolic too, and consequently L is a simple
rotation of parabolic type.

90 2 Space-Time Geometry and Relativistic Kinematics
At this point, we have to express the right-hand side of (2.277) in terms of A1
and A′1. We proceed proving the following identity:
(1− h)(1− h′)h+ h′
A0 +A2
h+ h′=
A21
1 + h+
A′12
1 + h′. (2.278)
Starting from (2.200), which holds for each pair of antisymmetric tensors (inparticular for A = B = A1) and using (2.181)2, we have
∗A1
2 = A21 + I2(A2)A0 ,
so that1λ2A′2
1 = A21 + I2(A2)A0 ;
using then (2.235) leads to
I2A′21 + I ′2A
21 + I2I
′2A
0 = 0 , (2.279)
so that
A0 = − A′21
1− h′2 −A2
1
1− h2,
where we have used I2I′2 = (1 − h2)(1 − h′2) as a consequence of (2.276).
Finally, after substituting this relation on the left-hand side of (2.278) andrecalling that A2 = A2
1 +A′21 , the above identity (2.278) is proven.
Summarizing, each 4-rotation L can be cast in the following form:
L = A0 +A1 +A′1 +
A21
1 + h+
A′21
1 + h′, (2.280)
and, due to the orthogonality of A1 and A′1, can be written as a product of
two simple rotations, one of elliptic type (Le) and the other hyperbolic (Lh):
Le = A0 +A1 +A2
1
1 + ε√
1− I2, Lh = A0 +A′
1 +A′2
1
1 + ε′√
1− I ′2, (2.281)
that isL = LeLh = LhLe . (2.282)
In particular, the above decomposition shows that the isotropic lines of theprincipal plane of A′
1 are the only eigendirections of L: in fact, these are theonly common eigendirections of Lh and Le.
2.18.11 The Case of Orthogonal Symmetries: I1(L) = 0
Let us now consider the case I1(L) = 0, which also implies 2 + I2(L) = 0.This follows from (2.245) which reduces to the form 4A2 = −[2 + I2(L)]A0,and implies in turn

2.18 General Lorentz Transformations: II 91
I2(A) ≡ −12I1(A2) = 1 +
12I2(L) , (2.283)
that is,
A2 = −12I2(A)A0 . (2.284)
Using (2.284), we then have 4A4 = I22 (A)A0, and the Hamilton–Cayley iden-
tity (2.202) provides the condition [I2(A)]2 = 4I4(A). Thus, from (2.197),I4(A) ≤ 0 ∀A, necessarily follows that I2(A) = 0 and I4(A) = 0, orI2(L) = −2 from (2.283).
Summarizing, the condition I1(L) = 0 implies the two equalities:
I2(L) = −2 , A = 0;
hence, the rotation is only represented by its symmetric part D, satisfying thecondition (see (2.243)):
L = D , D2 = D0 . (2.285)
Such a case is similar to that of the axial symmetries in a three-dimensionalspace; in fact, since
I1(L) = 0 , I2(L) = −2 , I3(L) = 0 , I4(L) = 1 ,
L admits two real distinct eigenvalues: λ = ±1 which are both double roots.Hence we have the existence at least of two eigenvectors: u and u′: Lu = uand Lu′ = −u′, which are necessarily orthogonal, due to the symmetry of L.
Let us denote by u1 and u′1 another pair of vectors, forming with u and u′
a basis in M4. We have
Lu1 = λu + μu′ + νu1 + σu′1 . (2.286)
Applying L to both sides and taking into account (2.285) we find
u1 = λu− μu′ + L[νu1 + σu′1] , (2.287)
and in addition
σLu′1 = −λ(1 + ν)u + μ(1− ν)u′ + (1− ν2)u1 − νσu′
1 , (2.288)
using again (2.286). Adding and subtracting (2.286) and (2.287), we obtain⎧⎨⎩L[(ν − 1)u1 + σu′
1] = (1− ν)u1 − σu′1 − 2λu,
L[(ν + 1)u1 + σu′1] = (1 + ν)u1 + σu′
1 + 2μu′.(2.289)
We now have to distinguish between the two cases: σ �= 0 and σ = 0. Inthe first case (σ �= 0), (2.287) determines Lu′
1, starting from Lu1; moreover,(2.289) is equivalent to the conditions

92 2 Space-Time Geometry and Relativistic Kinematics
Lv′ = −v′ , Lv = v ,
where
v ≡ μu′ + (ν + 1)u1 + σu′1 , v′ ≡ λu + (ν − 1)u1 + σu′
1 ; (2.290)
therefore the vectors v and v′ of (2.290), independent of u and u′, are botheigenvectors of L, corresponding to the eigenvalues λ = −1 and λ = 1, respec-tively, and hence orthogonal.
If instead σ = 0, from (2.288), we have the following two subcases:
1. σ = 0 , ν = 1 , λ = 0,2. σ = 0 , ν = −1 , μ = 0,
in which one of the vectors (2.290) reduces to zero. However, in the case 1,we have from (2.286) Lu = μu′ + u1; thus, assuming
Lu′1 = λ′u + μ′u′ + ν′u1 + σ′u′
1 , (2.291)
for the components Lαβ along the basis {u,u′,u1,u′
1}, we see that I1(L) =1 + σ′, i.e. σ′ = −1. Furthermore, applying L to both sides of (2.291) givesμ′ = 1
2μν′; thus, the transformed vector Lu′
1 results in Lu′1 = λ′u + ν′(u1 +
12μu
′)− u′1 and the vectors (2.290) are given by
v′ ≡ −12λ′u− 1
4ν′v + u′
1 , v ≡ μu′ + 2u1 ; (2.292)
similarly, in case 2, we have
v′ ≡ λu− 2u1 , v ≡ 12μ′u′ − 1
4ν′v′ + u′
1 . (2.293)
Finally, in the case I1(L) = 0 (and only in this case), the rotation L is diag-onal and admits a pair of orthogonal 2-planes generated by eigendirections.In detail, one of such subspaces < u,v > is invariant for L, and the other< u′,v′ > is mapped into the opposite. These are orthogonal symmetries,say S, with respect to the nondegenerate 2-planes. Again this case can becharacterized by using antisymmetric tensors. In fact, if A = u∧v is a bivec-tor with an associated subspace E2 nonparabolic (I2(A) �= 0), the followingrepresentation holds:
S = −A0 − 2I2(A)
A2 , (2.294)
where I2(A) > 0 or I2(A) < 0 if E2 is elliptic or hyperbolic, respectively. Afterdecomposing the generic vector w ∈M4 as the sum of a vector wA ∈ E2 andanother wN ∈ E′
2, the symmetric of w with respect to the 2-plane E2 turnsout to be
S(w) = wA −wN = 2wA −w ,
from which (2.294) follows, using (2.261) and the identity: A2wA = A2w.

2.18 General Lorentz Transformations: II 93
We note that the bivector A introduced above is not the antisymmetric partof L (which is instead represented by the symmetric tensorD) but is a bivectorassociated with the subspace Π that specifies the symmetry and defined upto a multiplicative factor (Grassmann tensor of the 2-plane Π). However,(2.294) which characterizes the rotations with I1(L) = 0 in the context ofsimple rotations completes the previous representation (2.248)–(2.257).
Finally, as concerns the symmetries (2.294), they still generate (by prod-ucts) the rotation group.
2.18.12 Cayley Representation
For 4-rotations L, we also have the Cayley representation [1]:
L = (Q0 −Q)−1(Q0 +Q) ≡ (Q0 +Q)(Q0 −Q)−1 , (2.295)
where Q is an antisymmetric tensor, satisfying the condition
J(Q) def= I4(Q0 −Q) = 1 + I2(Q) + I4(Q) �= 0 . (2.296)
In analogy with the ordinary case, Q is said to be the characteristic tensor ofthe rotation L. As we will see in the following, Q is defined only for rotationssuch that
I(L) def= 2 + 2I1(L) + I2(L) �= 0 . (2.297)
Equation (2.295) can be written explicitly. To this end, let us use theHamilton-Cayley identity for the map X = Q0 −Q:
X−1 =1
I4(X)[I3(X) I−I2(X)X + I1(X)X2 −X3] . (2.298)
Moreover we have I1(X) = 4, I2(X) = 6 + I2(Q) and I3(X) = 4 + 2I2(Q);using then the Hamilton–Cayley identity also for Q4,
Q4 = −I2(Q)Q2 − I4(Q)Q0 ,
one gets21 the expression of L in terms of Q:
L =1
J(Q){[1 + I2(Q)− I4(Q)]Q0+
2[1 + I2(Q)]Q+ 2Q2 + 2Q3}. (2.299)
This relation represents L as a third-degree polynom in Q instead of thesecond-degree polynom of the canonical representation (2.248) in terms of theantisymmetric part A. Under the hypothesis (2.296), J(Q) �= 0, (2.299) canbe solved for Q
Q = (L− L0)(L + L0)−1 ; (2.300)21 See [10], p. 88, taking the contraction Q = K/k , k �= 0.

94 2 Space-Time Geometry and Relativistic Kinematics
introducing then the notation Ydef= L + L0, the Hamilton–Cayley identity
implies
Y −1 =1
I4(Y ){I3(Y )L0 − I2(Y )Y + I1(Y )Y 2 − Y 3
}.
On the other hand, it is easy to show that⎧⎪⎪⎪⎨⎪⎪⎪⎩
I1(Y ) = 4 + I1(L),
I2(Y ) = 6 + 3I1(L) + I2(L),
I3(Y ) = 4 + 3I1(L) + 2I2(L) + I3(L) ≡ 4 + 4I1(L) + 2I2(L).
(2.301)
Thus, using again the Hamilton–Cayley identity,
L4 = I1(L)L3 − I2(L)L2 + I3(L)L− I4(L)L0
= I1(L)L3 − I2(L)L2 + I1(L)L− L0 ,
Equation (2.300) assumes the form
Q =1
I4(Y ){−[2I1(L) + I2(L)]L0 + 2[1 + I1(L) + I2(L)]L
−2[L0 + I1(L)]L2 + 2L3}. (2.302)
From (2.299), the relation between Q and A follows immediately:
A =2[1 + I2(Q)]Q+ 2Q3
J(Q). (2.303)
Therefore, differently from the ordinary case, A is not a simple function of Q.Similarly, (2.299) gives the fundamental invariants of L, in terms of Q:⎧⎪⎪⎨
⎪⎪⎩I1(L) ≡ I3(L) =
4J(Q)
[1− I4(Q)]
I2(L) = 2[3− 4
I2(Q)J(Q)
], I4(L) = 1,
(2.304)
so that the invariant (2.297) is given by
I(L) =16J(Q)
. (2.305)
Conversely,
I2(Q) =2
I(L)[6− I2(L)] , I4(Q) = 1− 4
I1(L)I(L)
. (2.306)
Equation (2.305) shows that the Cayley representation only includes rotationslike I(L) �= 0; that is, rotations with I(L) = 0, i.e.
2 + I2(L) = −2I1(L) → I4(A) = 0 , (2.307)
are excluded. The latters are necessarily simple rotations as the symmetry S(but not all of these, differently from the ordinary case).

2.18 General Lorentz Transformations: II 95
2.18.13 Composition Law
We will study now the modifications to the Rodrigues formula (2.177) passingfrom the three-dimensional case to the four-dimensional one.
Let L and L′ be two rotations associated with the antisymmetric tensors Qand Q′, respectively
L = (Q0 −Q)−1(Q0 +Q) , L′ = (Q0 −Q′)−1(Q0 +Q′) .
We look for the map Q′′ associated with the rotation product of L′ and L:L′′ = L′L, at least in the generic case: I(L), I(L′), I(L′′) �= 0 (see (2.297) fortheir definition). Let us assume
v′ def= Lv , v′′ = L′v′ , ∀v ∈M4 .
The map v→ v′′ associated with the product L′′ = L′L is implicitly definedby the relations
Q(v′ + v) = v′ − v , Q′(v′′ + v′) = v′′ − v′ , (2.308)
which follow from (2.295) and using the linearity of the map Q; in fact
(Q0 −Q)L(v) = (Q0 +Q)(v) → v′ −Q(v′) = v +Q(v) , (2.309)
so thatQ(v) +Q(v′) = −v + v′ , (2.310)
which immediately reduces to (2.308)1, similarly for the derivation of (2.308)2.We look then for the map Q′′ such that
Q′′(v′′ + v) = v′′ − v . (2.311)
A straightforward calculation shows that
(Q+Q′ +Q′Q−QQ′)(v′′ + v) −Q′QQ′(v′′ + v′)−QQ′Q(v′ + v) = v′′ − v ; (2.312)
thus, we need to evaluate the product:
Cdef= −Q′QQ′(v′′ + v′)−QQ′Q(v′ + v) .
To this end, we note that from (2.196) and (2.200) we have
QQ′ =∗Q′ ∗Q+
12I1(QQ′)Q0 , Q
∗Q =
∗QQ = −
∗I (Q)Q0 , (2.313)
with∗I (Q) ≡ −1
4I1(Q
∗Q) . (2.314)

96 2 Space-Time Geometry and Relativistic Kinematics
Thus,
Q′QQ′ = Q′ ∗Q
′ ∗Q+
12I1(QQ′)Q′ ≡ −
∗I (Q′)
∗Q+
12I1(QQ′)Q′ ,
with∗I (Q′) ≡ −1
4I1(Q′ ∗
Q′) . (2.315)
Similarly, exchanging Q and Q′ in the above product we have directly
QQ′Q = −∗I (Q)
∗Q′ +
12I1(QQ′)Q ;
and hence,
C =∗I (Q′)
∗Q(v′′ + v′)− 1
2I1(QQ′)Q′(v′′ + v′)
+∗I (Q)
∗Q
′(v′ + v) − 1
2I1(QQ′)Q(v′ + v)
or, using (2.308):
C =∗I (Q′)
∗Q(v′′ + v′ + v′ − v) +
∗I (Q)
∗Q
′(v′ − v′′ + v′′ + v)
−12I1(QQ′)Q′(v′′ − v)
= [∗I (Q′)
∗Q+
∗I (Q)
∗Q
′](v′′ + v)− 1
2I1(QQ′)(v′′ − v)
+∗I (Q′)
∗Q(v′ − v)−
∗I (Q)
∗Q
′(v′′ − v′) .
Moreover, from (2.308) and (2.313)2 we have
∗I (Q′)
∗Q(v′ − v)−
∗I (Q)
∗Q′(v′′ − v)
=∗I (Q′)
∗QQ(v′ + v)−
∗I (Q)
∗Q′Q′(v′′ + v′)
=∗I (Q)
∗I (Q′)(v′′ − v) ,
so that C can be written as
C = [∗I (Q′)
∗Q+
∗I (Q)
∗Q
′](v′′ + v)
−12I1(QQ′)(v′′ − v) +
∗I (Q)
∗I (Q′)(v′′ − v) ,
and (2.312) becomes
[Q+Q′ +Q′Q−QQ′ +∗I (Q′)
∗Q+
∗I (Q)
∗Q
′](v′′ + v) +
−[12I1(QQ′)−
∗I (Q)
∗I (Q′)
](v′′ − v) = (v′′ − v) .

2.19 General Lorentz Transformations: III 97
Using this result, one finally gets the sought for composition law for rotationsin terms of Q:
Q′′ =Q+Q′ +Q′Q−QQ′ +
∗I (Q′)
∗Q+
∗I (Q)
∗Q
′
1 + 12I1(QQ
′)−∗I (Q)
∗I (Q′)
, (2.316)
where∗I (Q) is defined by (2.314)–(2.315), and it is related to I4(Q) by (2.197):
[∗I (Q)]2 = −I4(Q). In the case of simple rotations, (2.316) reduces to the ordi-nary law; moreover, as in the three-dimensional case, it includes the limitingcase of rotations with I(L) = 0, and hence it has a general validity.
2.19 General Lorentz Transformations: III
We have outlined above the fundamental role of antisymmetric 2-tensors (andtheir associated tensorial space Λ2) in the representation of rotations in M4.As in the three-dimensional case, rotations in M4 are characterized by certainisotropic tensorial functions defined in Λ2. In the preceding sections, the closerelation between 4-rotations and antisymmetric 2-tensors has been discussed,using the properties of the associated maps. The same approach can be usedin a complex context by means of the technique of null tetrads,22 taking intoaccount that any 4-rotation admits at least an isotropic eigenvector, as wellas in the real domain [10], in the context of Clifford’s algebra of M4. We willbriefly introduce here this point of view limiting ourselves to the Minkowskiancase; the extension to any linear space En endowed with a nonsingular metricis straightforward.
Independently of its metric structure, one can associate with M4 a finitedimensional space Λ. In fact, the various linear spaces Λq (q = 0, 1, 2, 3, 4),formed by antisymmetric tensors of various order (up to the maximum order4), are related to M4 as follows:
• Λ0 = R, scalars:a = ae,
• Λ1 = M4, vectors:a = aαeα ,
• Λ2 = M4 ∧M4, antisymmetric 2-tensors:A = 1
2Aαβeα ∧ eβ , with eα ∧ eβ = 2!e[α ⊗ eβ],
• Λ3 = M4 ∧M4 ∧M4, antisymmetric 3-tensors:T = 1
3!Tαβγeα ∧ eβ ∧ eγ , with eα ∧ eβ ∧ eγ = 3!e[α ⊗ eβ ⊗ eγ],
• Λ4 = M4 ∧M4 ∧M4 ∧M4, antisymmetric 4-tensors:Q = 1
4!Qαβγρeα∧eβ∧eγ∧eρ, with eα∧eβ∧eγ∧eρ = 4!e[α⊗eβ⊗eγ⊗eρ],
22 Such a technique is better included in the more general context of anholonomicframes, and it is widely used in general relativity, see e.g. [11].

98 2 Space-Time Geometry and Relativistic Kinematics
where {eα} is an arbitrary basis in M4 and, to uniform notation, e = 1.It is convenient to consider the direct sum (Cartesian product) of such
spaces Λ:Λ = Λ0 ⊕ Λ1 ⊕ Λ2 ⊕ Λ3 ⊕ Λ4 ; (2.317)
this is a finite dimensional space with dimension: 1 + 4 +(42
)+(43
)+(44
)=
16. We note that both the direct sum of the spaces of symmetric tensors ofvarious order associated with M4 and the direct sum of all the tensorial spacesassociated with M4 have not a finite dimension.
Up to now the 16-dimensional space Λ has only the structure of linear space.However, it can be endowed with an internal noncommutative product, whichwe will denote with a ◦ (Clifford’s product), using the metric of M4. Let usstart defining the ◦ product of two antisymmetric tensors, A and B of differentorder, say k and h, respectively, with k < h. The following representationshold ⎧⎪⎨
⎪⎩A =
1k!Aα1...αkeα1 ∧ · · · ∧ eαk
,
B =1h!Bβ1...βheβ1 ∧ · · · ∧ eβh
,
(2.318)
where α1 . . . αk, β1 . . . βh = 0, 1, 2, 3.The exterior product of A and B is an antisymmetric tensor of order (k+h)
given by
A ∧B =1k!h!
Aα1...αkBβ1···βheα1 ∧ · · · ∧ eαk∧ eβ1 ∧ · · · ∧ eβh
. (2.319)
Successively, from the tensor product Aα1...αkBβ1...βh , by contraction of in-dices (i.e. using the metric gαβ = eα · eβ of M4), we can deduce other anti-symmetric tensors of lower rank:
Aα1...αk−1β1B
β1...βh , Aα1...αk−2β2β1B
β1β2...βh , . . . , Aβk...β1Bβ1...βkβk+1...βh .
It is useful to introduce the notation
eα1...αk··· = eα1 ∧ · · · ∧ eαk∧ · · · ; (2.320)
the ◦ product (or Clifford’s product) of A and B is defined by
A ◦B def= A ∧B + a1Aα1...αk−1
β1Bβ1...βheα1...αk−1β2...βh
+
a2Aα1...αk−2
β2β1Bβ1β2...βheα1...αk−2β3...βh
+ · · ·+akAβk...β1B
β1...βkβk+1...βheβk+1...βh, (2.321)
whereaj =
1j!(k − j)!(h− j)! , j = 1, . . . , k .
Note that extending the definition of aj to the value j = 0: a0 = 1/(h!k!)allows writing A ∧B in the form

2.19 General Lorentz Transformations: III 99
A ∧B = a0Aα1...αk Bβ1...βheα1...αkβ1...βh
.
Using the ordinary composition rule of the product, it is clear that the product(2.321) can be extended to all the elements of Λ. The ◦ product is noncommu-tative, but it can be iterated and hence it results associative. Thus, the spaceΛ, endowed with the linear extension of the product (2.321), becomes an as-sociative algebra, and any ordered pair (α,β) of elements of Λ is associatedwith a third element γ ∈ Λ:
(α,β) → γdef= α ◦ β ∈ Λ ;
this relation defines Clifford’s algebra C of M4.As an example, let us consider the ◦ product of two vectors u and v. In
this case, h = k = 1, and the ◦ product reduces to
u ◦ v = u ∧ v + u · v . (2.322)
In fact, (2.321) can be written as
u ◦ v =1
1!1!uαvβeαβ +
10!0!
uβvβe ,
where eαβ = eα ∧ eβ and e = 1, that is, (2.322). In particular, when v = u(2.322) implies
u ◦ u = ||u|| , (2.323)
while, if u and v are orthogonal
u ◦ v = u ∧ v , u ⊥ v . (2.324)
Thus, if one considers in M4 an orthonormal basis {cα}, (2.322) implies
cα ◦ cβ = cα ∧ cβ +mαβ (α, β = 0, 1, 2, 3) . (2.325)
Clifford’s algebra contains a subalgebra and a group. In fact, the direct sumoperation ⊕ is associative and hence the space Λ can also be written as thedirect sum of two spaces: Λ+ and Λ−, defined by
Λ+ def= Λ0 ⊕ Λ2 ⊕ Λ4 , Λ− def= Λ1 ⊕ Λ3 , (2.326)
both of them with dimension 8; that is
Λ = Λ+ ⊕ Λ− . (2.327)
The elements of Λ+ are said “even”, while those of Λ− are said “odd”. Onone side, Clifford’s algebra induces in Λ+ a subalgebra: C+, such that
Λ+ ◦ Λ+ = Λ+ , Λ− ◦ Λ− �= Λ− ;
hence, the ◦ product is not adapted to the structure (2.327). On the other side,one can consider the regular elements of Clifford’s algebra, i.e. those elementsα ∈ C satisfying the following properties:

100 2 Space-Time Geometry and Relativistic Kinematics
1. they are invertible. This means that α ∈ C has an inverse α−1 ∈ C:α ◦α−1 = α−1 ◦α = e = 1;
2. they satisfy the property:
α ◦ v ◦α−1 = w ∈M4 , ∀v ∈M4 . (2.328)
Such elements of C form Clifford’s group: Γ ∈ C which is of special impor-tance for the representation of rotations in M4. In fact Γ contains both evenand odd elements, and the quotient Γ/Λ0 − 0 is isomorphic to the Lorentzgroup; in other words, each element α ∈ Γ specifies a well-determined Lorentzmatrix L:
L = L(α) , α ∈ Γ . (2.329)
Conversely, each L specifies an element α ∈ Γ, up to a multiplicative factor.In fact, the correspondence (2.329) is associated with the relation:
Lv = α ◦ v ◦α−1 , ∀α ∈ Γ,v ∈M4 , (2.330)
or equivalently,
L−1v = α−1 ◦ v ◦α , ∀α ∈ Γ,v ∈M4 . (2.331)
2.19.1 Clifford’s Product Composition Law
We can now characterize the regular elements of Clifford’s algebra. To thisend, we will derive the composition law of Clifford’s product. Let us considerthen a generic element α ∈ Λ:
α = ae + aαeα +12Aαβeαβ +
13!Tαβγeαβγ +
14!Qαβγρe
αβγρ; (2.332)
introducing the Ricci tensor ηαβρσ, we have
eαβρ = ησαβρeσ, eαβρσ = ηαβρσΣ , (2.333)
whereΣ = − 1
4!ηαβγδeαβγδ (2.334)
is an odd-type antisymmetric 4-tensor, i.e. a basis in Λ4. Thus, we have thefollowing expression for α:
α = ae + a + A + a + aΣ , (2.335)
where a = aαeα, A = 12A
αβeαβ , and⎧⎨⎩
a = 13!T
αβρησαβρeσ = aσeσ (odd-type vector)
a = 14!Q
αβρσηαβρσ (odd-type scalar).(2.336)

2.19 General Lorentz Transformations: III 101
Equation (2.335) represents the generic element α ∈ Λ in terms of a pairof scalars (a, a), a pair of vectors (a, a) and an antisymmetric 2-tensor A.Actually, aσ is a pseudovector, and a is a pseudoscalar obtained through theduality operation from an antisymmetric 3-tensor Tαβρ and an antisymmetric4-tensor Qαβρσ, respectively:
aσ =13!ησαβρT
αβρ ≡ ∗Tσ, a =14!ηαβρσQ
αβρσ ≡ ∗Q , (2.337)
with the inverse relations,
Tαβρ = ηαβρσaσ , Qαβρσ = −aηαβρσ . (2.338)
Let β ∈ Λ be another element of Λ:
β = be + b + B + b + bΣ , (2.339)
and consider the product α ◦ β = γ taking into account (2.321). γ is still anelement Λ, and it can be written as
γ = ce + c + C + c + cΣ , (2.340)
where the various quantities c, c,C, c, c are functions of the analogous quan-tities of α and β.
For example, multiplying the scalar a by the various elements of β, therearise the following terms:
ab , ab , aB , ab , ab .
Multiplying instead the vector a by β and using (2.322) and (2.338) gives riseto the following terms:
ab , a ∧ b + a · b , a ∧B + aαBαβeβ ,
a ∧ ∗b +12!aα(∗b)αβρeβρ , − 1
3!aαbη
αβρσeβρσ ,
which are equivalent to
ab , a ∧ b + a · b ,∗Ba− Ba , a · bΣ +
∗[a ∧ b] , ba ,
respectively using (2.333). Introducing the compact notation
B =12Bαβeαβ , → Ba = (Bαβaβ)eα , (2.341)
the above terms can be written as
a · b , ba−Ba , a ∧ b +∗
[a ∧ b] ,∗Ba + ba , a · b .

102 2 Space-Time Geometry and Relativistic Kinematics
Summarizing, we have the following relations among the coefficients of theproduct α ◦ β and those of the single factors:⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
c = ab− ab+ a · b + a · b + 12TrAB,
c = ab + ba− (ba− ab) +Ab−Ba−∗Ba−
∗Ab,
C = aB + bA + [A,B] + a ∧ b + a ∧ b +∗[ a ∧ b + b ∧ a] + a
∗B + b
∗A,
c = ab + ba + ba− ab +Ab−Ba +∗Ab + +
∗Ba,
c = ab+ ba+ a · b− b · a− 12TrA
∗B;
(2.342)here we have used the standard notation: AB ≡ (Aα
ρBρβ) and [A,B] is the
antisymmetric tensor associated with the commutator AB −BA:
[A,B] ≡ 12(Aα
ρBρβ −Bα
ρAρβ)eαβ . (2.343)
As a final remark, we note that (2.342) hold in general and are the cornerstones of Clifford’s algebra, reducing the product of any two elements of C tocertain tensor algebra operations.
2.19.2 Regular Elements of Clifford’s Algebra
Let us study now the regular elements of Clifford’s algebra, starting from evenelements; we have
a = 0 , a = 0 . (2.344)
The product α ◦ β is still even: c = 0 , c = 0 and (2.342) implies
c = ab− ab+12Tr (AB),
C = aB + bA + [A,B] + a∗B + b
∗A,
c = ab+ ba− 12Tr (A
∗B) ; (2.345)
furthermore, the products AB, BA, A∗B and B
∗A have the same first invariant.
In fact, for example, the coefficients of the map A∗B are
Aαρ∗Bρβ =
12Aα
ρηρβμνBμν ,
so thatTr(A
∗B) = −1
2Aβρη
βρμνBμν = Tr(B∗A) .
In (2.345), c and c are thus symmetric functions of α and β, differently fromC. Hence, necessary and sufficient condition to have α ◦ β = β ◦α is
AB = BA ∼ [A,B] = 0 ; (2.346)

2.19 General Lorentz Transformations: III 103
that is, α and β can be exchanged if and only if the associated antisymmetric2-tensors A and B commute.
Moreover, necessary and sufficient conditions in order that α = ae+A+ aΣmight have an inverse β = be + B + bΣ = α−1 are
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
AB = BA
ab− ab+12Tr (AB) = 1
aB + bA + a∗B + b
∗A = 0
ab+ ba− 12Tr (A
∗B) = 0,
(2.347)
that is α ◦ β = β ◦ α = e. To complete the characterization of the evenelements, it is necessary to add to (2.347) the conditions
α ◦ v ◦ β ∈M4 ∀v ∈M4 .
To this end, let us evaluate first of all the factor α ◦ v from (2.342):
α ◦ v = av +Av − av +∗Av ;
we can consider then the product (α ◦ v) ◦ β, which is of odd type, so that
c = 0 , C = 0 , c = 0 ,
and the nonvanishing coefficients are given by⎧⎨⎩
c = [(ab+ ab) I +bA− aB + a∗B − b
∗A−BA−
∗B
∗A]v
c = [(ab− ba) I +b∗A+ a
∗B + bA+ aB +
∗BA−B
∗A]v.
(2.348)
The parity condition c = 0 ∀v then implies
(ba− ab) I +B∗A−
∗BA = b
∗A+ a
∗B + bA+ aB ,
which, by symmetrization and antisymmetrization gives the two relations:⎧⎨⎩
(ba− ab) I + 12 [B
∗A+
∗AB −
∗BA−A
∗B] = 0,
12 [B,
∗A]− 1
2 [∗B,A] = b
∗A+ a
∗B + bA+ aB.
(2.349)
Taking into account the identity (2.208), we have that α ∈ Γ+ if one requiresadditional conditions to (2.347), namely,
⎧⎨⎩
(ba− ab)I =∗BA−B
∗A
aB + bA = −b∗A− a
∗B.
(2.350)

104 2 Space-Time Geometry and Relativistic Kinematics
Moreover, by duality, (2.344) gives the relation:
aB + bA = a∗B + b
∗A .
Comparing with (2.350), we then obtain the two conditions:
aB + bA = 0 , a∗B + b
∗A = 0 .
Next, assuming a �= 0 and a �= 0 (general case), we find B = −bA/a = −bA/a,and b/a = b/a = λ. Thus, finally
B = −λA , b = λa , b = λa , (2.351)
with λ a parameter still unknown . From (2.347)2, with the constraints (2.351),we have
(a2 − a2)λ− 12λI1(A2) = 1 ,
so that, assuming(a2 − a2) + I2(A) �= 0 , (2.352)
one gets the value of λ:
λ =1
(a2 − a2) + I2(A). (2.353)
Equation (2.347)4 in turn becomes
2λaa = −12λ Tr(A
∗A) ,
that is, in agreement with (2.194):
aa =∗I (A) . (2.354)
We have just proven the following theorem:The even and regular elements of Clifford’s algebra in M4 can be written
as α = ae + A + aΣ and are characterized by the two conditions:
(a2 − a2) + I2(A) �= 0 , aa =∗I (A) , (2.355)
where∗I (A) is the odd invariant defined by (2.194):
∗I (A) = −1
4I1(A
∗A) ≡ 1
4Aαβ
∗Aαβ , (2.356)
also related to I4(A):[∗I (A)]2 = −I4(A) . (2.357)
The inverse of α, because of (2.351)–(2.353), is given by

2.19 General Lorentz Transformations: III 105
α−1 =1
(a2 − a2) + I1(A2)(ae − A + aΣ) , (2.358)
that is, apart from the normalization factor, there is only the replacementA→ −A in the expression of α.
Similarly, assuming α and β of odd type,
α = a + a , β = b + b , (2.359)
and imposing the conditions,
α ◦ β = β ◦α , α ◦ β = 1 , β ◦ v ◦α ∈M4 ∀v ∈M4 , (2.360)
one can determine the odd-type elements of Clifford’s group. We have that theregular odd-type elements α = a + a are only those satisfying the conditions:
||a|| − ||a|| �= 0 , a · a = 0 ; (2.361)
in this case, the inverse of α is given by:
α−1 =1
||a|| − ||a|| (a− a) . (2.362)
In the following, we will consider only the even elements and the associated L-representation (2.330) in terms of antisymmetric 2-tensors. This characterizesthe proper Lorentz group, excluding antirotations.
2.19.3 Proper Rotations and Antisymmetric 2-Tensors
We have seen that each regular element of Clifford’s subalgebra C+ (see(2.344)–(2.355)) defines a 4-rotation L. To obtain the expression of L, one hasto consider an arbitrary vector v ∈M4 and evaluate the product α−1 ◦v ◦α;in fact Lv = α ◦ v ◦ α−1. In detail, from (2.348)1 and taking into account(2.351)–(2.353), we have the following expression for L:
L =1
a2 − a2 + I2(A)
{(a2 + a2) I +2[aA− a
∗A] +A2 +
∗A2}, (2.363)
where both the antisymmetric 2-tensors A and∗A appear as well as the two
scalars a and a, which are not independent because of (2.355)2. In the repre-sentation (2.363) of L obtained starting from α ∈ Γ+, we see that α does notenter in an essential way, since there always exists an arbitrary factor at dis-posal. In fact, the right-hand side of (2.363) is invariant under transformationslike
a→ λa , a→ λa , A→ λA , (2.364)
since both the numerator and the denominator in (2.363) are homogeneousand second-degree function of α. We can then use the factor λ to simplify

106 2 Space-Time Geometry and Relativistic Kinematics
(2.363). After assuming for instance a �= 0 (that is, A nondegenerate), anddefining:
q = a/a , Q = A/a , (2.365)
Equation (2.363) can be written as
L =1
J(Q)
{(1 + q2) I +2[Q− q
∗Q] +Q2 +
∗Q
2}, (2.366)
so that (2.355)–(2.357) assume the form
J(Q) = 1− q2 + I2(Q) �= 0 , q =∗I (Q), q2 = −I4(Q) . (2.367)
Note that (2.366) gives L in terms of the antisymmetric 2-tensors Q and itsdual
∗Q. One can also eliminate the dual using (2.204) and (2.200):
∗I (Q)
∗Q = −Q3 − I2(Q)Q , [
∗Q]2 = Q2 + I2(Q)I , (2.368)
so that one re-obtains the Cayley representation (2.299):
L = (Q0 +Q)(Q0 −Q)−1 . (2.369)
Therefore L results in an isotropic function of the antisymmetric 2-tensorQ = (Qα
β), which is also a third-degree polynom, because of the Hamilton–Cayley identity (2.202).
Moreover, (2.366) corresponds to the vectorial operator α ◦ v ◦α−1 associ-ated with the even element α, in agreement with (2.330):
α = e ⊕ Q ⊕ qΣ ∈ Λ . (2.370)
Hence, if one considers another rotation L′:
L′ =1
1 + I ′2 + I ′4
[(1 + I ′2 − I ′4) I +2[1 + I ′2]Q
′ + 2Q′2 + 2Q′3] , (2.371)
associated with the antisymmetric tensor Q′, or to the even element α′:
α′ = e ⊕ Q′ ⊕ q′Σ ∈ Λ , (2.372)
one can evaluate the product:
L′′ = L′L , (2.373)
i.e. the rotation associated with the even element α′′:
α′′ = α′ ◦α , (2.374)
clearly defined up to an arbitrary multiplicative factor23:23 The inverse of the product coincides with the product of the inverses, in inverse
order.

References 107
α′ ◦ v′ ◦α′−1 ≡ α′ ◦ (α ◦ v ◦α−1) ◦α′−1 = (α′ ◦α) ◦ v ◦ (α′ ◦α)−1 .
α′′ can then be obtained applying the general relations (2.342) with a = 1,a = 0, A = Q′, a = 0, a = q′, and b = 1, b = 0, B = Q, b = 0, b = q. In fact,assuming c �= 0, that is, assuming the following constraint for Q and Q′:
1− qq′ +12Tr(QQ′) �= 0 , (2.375)
the 4-rotation L′′ is still of the form (2.366):
L′ =1
1 + I ′′2 + I ′′4
[(1 + I ′′2 − I ′′4 ) I +2[1 + I ′′2 ]Q′′ + 2Q′′2 + 2Q′′3] , (2.376)
where Q′′ is given by (2.342)3 in terms of Q and Q′. Hence, the followingrelation (equivalent to C/c) holds:
Q′′ =Q+Q′ +Q′Q−QQ′ + q′
∗Q+ q
∗Q
′
1− qq′ + 12TrQQ′ , (2.377)
which is exactly the composition law (2.316), if one uses (2.367)2.
References
1. G. Ferrarese, Lezioni di meccanica razionale, Vol. I, ed. Pitagora, Bologna(1980). 29, 36, 48, 60, 64, 65, 69, 71, 85, 93
2. C. Cattaneo, Appunti di meccanica relativistica, ed. La Goliardica, Roma(1973). 45
3. G. Ferrarese, Introduzione alla dinamica Riemanniana dei sistemi continui, ed.Pitagora Bologna (1981). 46, 69, 71
4. G. Ferrarese, L. Stazi, Sulla struttura del gruppo di Lorentz, Rend. Mat. Roma,3, 511–528, (1983). 113
5. W. Rindler, Introduction to special relativity, Clarendon Press, Oxford (1982).52
6. C. Moller, The theory of relativity, Clarendon Press, Oxford (1952). 60, 677. C.C. Chevalley, The algebraic theory of spinors, Columbia University Press,
New York (1954). 718. G. Ferrarese, L. Stazi, Sulle proprieta generali dei tensori antisimmetrici di uno
spazio euclideo a 4 dimensioni, Rend. Mat. Roma, 2, 3, 171–183 (1983). 719. J. Plebanski, On algebraic properties of skew tensors, Bull. Acad. Polon. Sci.,
9, 587–591 (1961). 7410. S. Benenti, Sull’algebra di Clifford e sulla struttura tensoriale delle rotazioni in
uno spazio vettoriale reale a 4 dimensioni, Rend. Sem. Mat. Torino, 33, 73–102(1974). 93, 97
11. G. Ferrarese, L. Antonelli, Biframes of references with null congruences, Il NuovoCimento B, 115, 663–676 (2000). 97

3
Test Particle Dynamics
3.1 Fundamental Laws of Test Particle Dynamics
In the relativistic situation, we have seen that the acceleration of a pointparticle is no longer invariant in the context of Galilean frames. This reflectsalso into the assessment of the dynamics because it is no more possible tointroduce the dynamical concepts of mass and mechanical force following theclassical approach, i.e. starting from the postulates on the acceleration.
On the other hand, a theory like the relativistic one cannot be grounded on astatic definition of mass and force. The problem can be solved working directlywith the absolute point of view, i.e. in M4, and assuming a time orientation.The relative point of view, together with all the associated consequences andmodifications, will then follow, a posteriori, from the absolute formulation.
First of all, the law of inertia a = 0, as from (2.115), has an absolutemeaning and can be expressed by the condition A = 0, ∀τ ∈ (τ0, τ1), or inthe rectilinear form of the world line (V = constant) of the particle itself.
The second law of the dynamics, instead, should be adapted to the rela-tivistic case and results no longer in the expression ma = f but in its moregeneral version p = f , p = mv being the linear momentum which includesalso the case of variable mass particles. Such an extension, clearly, requiresthe preliminary definition (geometrical and dynamical) of the scheme “ma-terial point” which, because of its simplicity, plays a central role in the newrelativistic theory too.
In classical mechanics, such a scheme (geometrical point, endowed with apositive scalar quantity: the mass m, invariant by definition), can be used torepresent either the material elements (or particles, for brevity), or the finitedimensional material bodies in certain dynamical conditions. A posteriori, infact, it is justified, in the dynamics of material systems, by the theorem ofthe centre of mass motion. Independent of this theorem, however, a pointlikescheme can be considered also in special relativity, where a material particlecan be represented by an oriented world line �+ (its history in M4), and bya scalar invariant m0 > 0, locally defined on this line (its proper mass). If
G. Ferrarese and D. Bini: Test Particle Dynamics, Lect. Notes Phys. 727, 109–145 (2008)
DOI 10.1007/978-3-540-73168-9 3 c© Springer-Verlag Berlin Heidelberg 2008

110 3 Test Particle Dynamics
m0 is invariant along all the history of the particle m0 = constant, one saysthat the particle has no internal structure. This is a special case because themore general scheme for pointlike particles does not excludes that the masscan vary along �+, i.e. m0 = m0(E), ∀E ∈ �+. In the latter case, one saysthat the particle has an internal structure of scalar type.
We will assume m0 > 0; however, an analogous treatment could be donefor the case m0 < 0, associated with “exotic particles”.1 Separately, we willalso discuss the case of massless particles m0 = 0, corresponding to photons,as well as a unified dynamics of massive and massless particles.
However, the pointlike scheme, which we consider in the following, is notthe most general one. In fact, for a more adequate description of matter, itmay be necessary to introduce other local quantities, like the spin or othervectors or tensors. Moreover, we will see that the mass will be strictly relatedto the energy, so that m0 describes practically internal states of the particle.Thus, the problem of assuming m0 a continuous function all along �+, or not(as in quantum mechanics), arises too.
In any case, from a global point of view, for “particle” we will mean the pairof an oriented world line (or an arc) �+ and a function m0(E) > 0, defined∀E ∈ �+; from a local point of view, instead, the particle will be identified bythe event E ∈ �+, the value of m0 and the 4-velocity V, tangent to the worldline at that event [1, 2, 3]. So we define the linear 4-momentum:
P def= m0V ∀E ∈ �+ . (3.1)
The applied vector (E,P) summarizes either the kinematical or the materialstate of the particle because from P one obtains both m0 and V. In fact, from(3.1) and the condition V ·V = −c2, the norm of P follows: ||P|| = P · P =−m2
0c2, and hence
m0 =1c
√−P ·P , V =
1m0
P =cP√−P ·P
. (3.2)
As concerns the absolute laws of point mechanics, the law of inertia assumesa quite different form from the ordinary one. More precisely, requiring thatin absence of any external action a particle cannot modify either its internalstructure or its kinematical state, it can be formulated in the following form:
Law I (or inertia law): For any isolated particle, both the proper mass andthe 4-velocity (and hence the 4-momentum) are invariant:
P = const. (3.3)
Due to (3.2), (3.3) summarizes either the condition m0= constant, or thegeodesic law: the world line of a particle, in the absence of any external action,1 We will see that the canonical formulation of the dynamics will depend on m2
0.

3.1 Fundamental Laws of Test Particle Dynamics 111
is a straight timelike line of M4. From Law I, Law II follows easily. In fact,if a particle undergoes the action of an external force, its 4-momentum varies(and this happens either if �+ has nonvanishing curvature, or if the massm0 effectively depends on E). Thus dP/dτ �= 0 and can be interpreted as alocal measure of the 4-force K acting on the particle and responsible for itsdeviation from geodesic (inertial) motion. Thus, Law II can be formulated inthe following form:
Law II: The derivative of the 4-momentum with respect to proper time equalsthe 4-force:
K(E) =dPdτ
∀E ∈ �+ . (3.4)
Equation (3.4), in spite of representing directly a physical law, can be used todefine the value of the 4-force K(τ) starting from �+ and m0(τ). Conversely,this is the fundamental equation for the absolute dynamics of point particles,once the 4-force characterizing the associated physical action is assigned.
In the so-called restricted problems of the material point scheme, the pa-rameters can be at most τ,m0, E and V, i.e. τ, E,P:
K = K(τ, E,P) . (3.5)
This is a function of nine variables which, in order to represent a real phys-ical action, should be invariant with respect to the Lorentz transformations,similarly to the invariance with respect to the Galilean transformation lawsof the force: f = f(t, P,v) in classical mechanics. Such a property, which isautomatically satisfied here because of (3.5) implies that the 4-force Kα be avectorial function of M4, depending only on absolute quantities.
Thus, generally, in special relativity, the concept of force can be extendedeasily either from the absolute or the relative point of view. In general rel-ativity, instead, the absolute mechanism of the gravitational action will becompletely modified.
Finally, Law III, that is the action and reaction principle, completely losesits validity in relativity because here the concept of action at a distance isexcluded by principle. And this for two reasons: first of all, the simultaneityof two events has not an absolute meaning; hence, the concept of an instanta-neous action is meaningless. As a second reason, there is the fact that everyphysical action propagates with finite speed, that is, a certain amount of timeis necessary for the action to be effective. Hence, the concept of an immediateaction is meaningless too.
The action and reaction principle, however, remains valid in collision prob-lems, as well as in all the cases in which there are directed and mediatedactions, either in the case of particle–particle interaction or in the case ofparticle–field or even field–field interaction.

112 3 Test Particle Dynamics
3.2 Cauchy Problem
In the restricted problems of the point particle scheme, the fundamental lawof absolute dynamics is the following:
dPdτ
= K(τ, E,P) , (3.6)
where P = m0V is the 4-momentum of the particle, and τ is its propertime. Because of the dependence of K also on E, (3.6) is not a first-orderdifferential equation for the unknown P. Actually, P should be consideredas an auxiliary unknown, depending on E through m0 and V. Moreover,once the force law is assigned, the evolution of the particle, related to thedetermination of both m0 and the world line �+, is subject to (3.6), but alsoto the constraint V ·V = −c2, which takes into account the meaning of theproper time parameter τ . Thus, fundamental equations of point dynamics are
dPdτ
= K(τ, E,P), V ·V = −c2 . (3.7)
These equations, because of the relations P = m0V and V = dΩE/dτ , form adifferential system in 4 + 1 equations, for the five unknowns E(τ) and m0(τ),which can be cast into normal form, in the following way. Let us use thedefinition of P = m0V in (3.7)1; we find
dm0
dτV +m0
dVdτ
= K(τ, E,m0,V) .
From this, by scalar multiplication by V, and taking into account that (3.7)2implies V · dV/dτ = 0, one gets the following first-order differential system,normal in the unknowns m0, V and ΩE:
dm0
dτ= − 1
c2K ·V, m0
dVdτ
= K +1c2
(K ·V)V,dΩEdτ
= V ; (3.8)
to (3.8), one must add the condition V ·V = −c2. However, such a conditioncan be weakened requiring its validity at a certain instant only, let us sayinitially, at τ = τ0. In other words, the system (3.7) is equivalent to (3.8),supplemented by the initial condition:
V ·V = −c2 at τ = τ0 . (3.9)
To prove this, let us scalar multiply (3.8)2 by V; we find
m0V ·dVdτ
= K ·V(
1 +1c2
V ·V),
orm0c
2
2dXdτ
= (K ·V)X , X =(
1 +1c2
V ·V). (3.10)

3.2 Cauchy Problem 113
Thus, any solution of system (3.8) gives a unique solution X(τ) of (3.10). But(3.10) is linear and homogeneous in X and for it a uniqueness theorem is valid.Hence, if X(τ) vanishes initially, i.e. X(τ0) = 0 so that (3.9) is satisfied, thenX(τ) = 0 or V ·V = −c2, ∀τ > τ0 in a certain neighbourhood of τ0. In otherwords, the differential system (3.8) implies the constraint (3.7)2 once this issatisfied initially. Similarly, one may say that (3.7)2 is a conservation equationfor the system (3.9), and this is an involutive constraint in the terminology ofCartan.
Thus, once the force law is assigned, the absolute dynamics of the pointparticle is determined by the solution of the normal system (3.8) and, accord-ing to regularity properties of the force law, the evolution of the particle isuniquely determined by the initial conditions:
m0 = m0,0 , E = E0, V = V0 at τ = τ0 . (3.11)
V0, in turn, is not completely free, but must be chosen compatibly with(3.9). Moreover, neither the orientation of V0 is free. In fact, in the contextof equi-oriented Galilean frames (i.e. assuming M4 endowed with one of thetwo half lightcones, say C+
3 ), V0 should belong to this half-cone too.Hence, other than in the classical situation, the initial data are not free,
but they must satisfy the following limitation:
m0,0 > 0 , ||V0|| = −c2 , V0 ∈ C+3 , (3.12)
which, because of the above-mentioned property of conservation for the normof V, imply that the world line of the particle is timelike and has the sameorientation as V0. Put differently, for any kind of 4-force K, the Cauchyproblem (3.8)–(3.11) gives rise to a world line entirely contained in the half-cone C+
3 , with its vertex at E0. The latter condition gives also a dynamicalmeaning to such half-cone: it is the future of E0 or all the events which canbe influenced by E0, in the sense that they can be in causal relation with E0
as a consequence of the presence of K.It is also useful to distinguish between dynamical motions (effectively per-
formed by a material particle, under the action of an external field K(τ, E,P)and conditions (3.12)) and kinematical motions (a sequence of events notcausally connected). These last motions may imply a speed faster than thatof light and be represented by world lines external to the lightcone. For ex-ample, if a flash light sends signals onto a screen circularly at a distance r,in a certain Galilean frame, then, allowing the flash light to uniformly ro-tate with period T < 2πr/c, one has an image which moves uniformly ona circular trajectory, at speed v > c. This is not surprising because it isthe causality principle which forbids faster than light speed. Different wouldbe the case of postulating the existence of tachionic particles: this would bepossible only in a different relativistic theory, because postulate E will beviolated [4].

114 3 Test Particle Dynamics
3.3 Classification of 4-Forces. Conservative Forces
Independently of the force law (3.5), in a generic event E, K can always bedecomposed, in a unique way, into the sum of two vectors: one parallel to V(and hence timelike), and the other orthogonal to it, and hence spacelike andbelonging to the hyperplane Σ, orthogonal to V (see Fig. 3.1):
K = λV + F , F ∈ Σ : F ·V = 0 , λ = − 1c2
K ·V . (3.13)
This decomposition distinguishes between two kinds of 4-forces, according towhether K be tangent to the world line of the particle or orthogonal to it:
1. K = λV (or F = 0);2. K ·V = 0 (or λ = 0).
The first kind of 4-forces are of thermal type, whereas the second are ofmechanical type, and the reason of these names stems from (3.8):
⎧⎪⎨⎪⎩
K = λV → ddτ
m0 = λ �= 0 , V = const.
K ·V = 0 → m0 = const. , A = K/m0.
(3.14)
The 4-forces of the first kind have no effects on the motion, that is onthe curve arc (straight line) in M4 which represents it, but, through m0,they influence the internal structure of the material point. Thus, this can beconsidered an action of thermal type.
On the other hand, 4-forces of the second kind have only the effect of ac-celerating the particle, bending the world line without modifying its internalstructure; hence, they correspond to the ordinary mechanical actions. For in-stance, of such a kind is the effect of an electromagnetic field on a chargedparticle, i.e. the Lorentz force. As it will be discussed in Chap. 9, electromag-netism specifies this force as
E
l+
Σ0
Fig. 3.1. Space-time splitting induced by the world line of a material particle

3.3 Classification of 4-Forces. Conservative Forces 115
Kα =e
cFαβV
β , (3.15)
where e is the (invariant) charge of the particle, V β its 4-velocity and Fαβ theelectromagnetic tensor. This is not, in general, a force law like that specified in(3.5) because Fαβ is subordinated to Maxwell’s equations and is not directlygiven as a function of E. However, Fαβ is antisymmetric: Fαβ = −Fβα, andhence the Lorentz force is always of mechanical type:
K ·V = KαVα =
e
cFαβV
αV β = 0 .
An important consequence of this is the fact that the electromagnetic fieldcannot change the proper mass of a particle. Summarizing, the notion of 4-force includes two different physical actions, separated in the classical situationand here strictly related: the thermal action and the mechanical one.
However, (3.5), typical in restricted problems, does not exclude the exis-tence of positional forces, i.e. depending only on the point-event E where itis applied: K = K(E). Among these, in turn, one can consider conservativeforces, characterized by the existence of a regular and uniform scalar functionU(E) of E, such that, for all E in the domain of definition and for all worldlines passing through E, the mechanical power is an exact derivative, that is
K ·V =dUdτ
, (3.16)
or explicitly
V αKα = V α ∂U∂xα
=dUdτ
∀E, V;
hence:Kα =
∂U∂xα
, or K = GradU , (3.17)
even if V is not completely arbitrary but subordinated to the condition V·V =−c2. In fact, choosing V α = (c, 0, 0, 0), one gets K0 = ∂U0/∂x
0 and, in turn,choosing V α = (
√2c, c, 0, 0), V α = (
√2c, 0, c, 0), V α = (
√2c, 0, 0, c), one finds
Ki = ∂U/∂xi.Equation (3.17) characterizes K starting from the potential function U .
From this it follows that a conservative 4-force is necessarily positional, likeU0.
The hypersurfaces U(x0, x1, x2, x3) = const. form, in M4, the field equipo-tential hypersurfaces. They are three-dimensional and characterize the fielditself, through the congruence of the ∞3 orthogonal curves (flux lines of K).We notice here, from one side, the strict analogy with the classical case (eitherfor their definition or their representation properties) and, from the other side,the big difference between conservative forces in classical mechanics and con-servative 4-forces. The former have their conservative meaning with respectto a given Galilean frame, but there is not any absolute notion of conser-vativity (for instance, the Earth gravitational field is conservative, as well as

116 3 Test Particle Dynamics
central, only in the frame in which the Earth is at rest; in a frame in which theMoon is at rest, this field is no longer conservative, nor positional). Definition(3.16) has instead an absolute meaning and leads to the definition of U as theintrinsic potential of the 4-force K.
We list few examples of 4-forces:⎧⎪⎪⎪⎨⎪⎪⎪⎩
K = constant uniform field
K = φ(|ΩE|)vers|ΩE| central field, with centre Ω
K = φ(|ΩE|,V)vers|ΩE| general central field, with centre Ω ,
where |ΩE| =√|ΩE ·ΩE|. The first two fields are conservative, with potential
U = Kαxα and U = ε
∫φ(x) dx respectively, with x = |ΩE| and ε = ±1,
according to the positive/negative sign of the norm of ΩE.
3.4 Constrained Material Point
As in classical mechanics, it is meaningful to consider also in special relativitythe scheme of constrained material point. One has to put, a priori, a limitationto the scheme, and this can concern either the world line �+ (belonging, forinstance, to a certain hypersurface) or the material content of the particle.Thus, a relativistic and quite general constraint can be expressed as
φ(E,P, τ) ≥ 0 , (3.18)
with φ a scalar (invariant) function. The constraint (3.18) can be of specialkind; for example, holonomic (i.e. depending on E and τ only) or nonholo-nomic (i.e. depending on P too); unilateral (φ > 0) or bilateral (φ = 0); de-pendent or independent of τ . Furthermore, through P, the constraint (3.18)could impose limits to the proper mass m0. In this sense, a very simple bilat-eral constraint is
m0 = const . (3.19)
which refers only to the internal structure of the particle. We define the con-straint to be ideal if the corresponding 4-reaction is R = λV, with λ generic.
In the constrained scheme, the fundamental law of relativistic dynamicsshould be written by distinguishing the active 4-force from the reaction of theconstraint, which is a supplementary unknown for the problem; from here thenecessity of specifying the dynamical properties of the constraint itself (e.g.ideal constraint or not) follows. Thus, the fundamental equation becomes
dPdτ
= K(E,P, τ) + R , (3.20)
or, similarly to (3.8):

3.5 The Conservative Case. Hamiltonian Formulation 117⎧⎪⎪⎨⎪⎪⎩
dm0
dτ= − 1
c2(K + R) ·V
m0dVdτ
= K + R +1c2
(K + R) ·VV .
(3.21)
In particular, when R = λV, the above equations reduce to
dm0
dτ= − 1
c2K ·V + λ , m0
dVdτ
= K +1c2
K ·VV , (3.22)
where the unknown λ is specified from the constraint. In particular, if theconstraint is that given in (3.19) (particle without any internal structure),(3.22)2 is a “pure” equation for the determination of the motion. Once (3.22)2is solved, starting from certain initial conditions, then (3.22)1 gives the valueof λ:
λ =1c2
K[τ, E(τ),P(τ)] ·V(τ) ,
and hence the value of the reaction of the constraint is also known.
3.5 The Conservative Case. Hamiltonian Formulation
Let us consider now the fundamental system (3.8), which determines, startingfrom an assigned 4-force law, the point particle dynamics, with variable propermass (i.e. the system (3.7)). Instead of using the derivative of P = m0V, weassume the expression of V in terms of P, given by (3.2)2, and consider, then,the following first-order differential system in the unknown ΩE and P:
dPdτ
= K(E,P, τ),dΩEdτ
=cP√−P ·P
. (3.23)
Such a system clearly implies the condition V · V = −c2 as a direct conse-quence of (3.23)2 and is equivalent to (3.7) and hence to (3.8). It is thereforea first-order (normal type) formulation, in eight unknowns: P = P(τ) andE = E(τ) (in (3.8) there were nine unknowns), which confirms the unique-ness of the motion, once the (regular) force law K is assigned, together withthe initial conditions E0 and P0, satisfying the single limitation P0 ∈ C+
3 (E0).In scalar terms, assuming as variables the coordinates of E, namely xα, and
the momenta Pα = mαβPβ , the system (3.23) becomes
dPα
dτ= Kα(E,P, τ),
dxα
dτ=
cmαβPβ√−mρσPρPσ
. (3.24)
The existence and uniqueness of the motion is obtained by including the initialconditions (Cauchy problem):
xα = xα0 , Pα = Pα,0 at τ = τ0 (3.25)

118 3 Test Particle Dynamics
with the coordinates of the event E0: xα0 , belonging to the regularity domain
of Kα, and mαβPα,0Pβ,0 < 0, i.e. P0 ∈ C+3 (E0).
System (3.24) is of special interest because when Kα is conservative it givesrise to a Hamiltonian formulation. In fact, if the 4-force is conservative: Kα =∂U/∂xα, by introducing the proper material energy of the particle: E0 = m0c
2,as well as its positional energy Π0 = −U , (3.24) are equivalent to the followingcanonical system, with Hamiltonian function H(x, P ) ≡ Π0 − E0:
dPα
dτ= − ∂H
∂xα,
dxα
dτ=
∂H∂Pα
. (3.26)
In fact, from (3.1)1, we have
H = −U(x)− c√−mρσPρPσ , (3.27)
and hence, using the relation
∂
∂Pα(−P ·P) = −2Pα = −2mαρPρ , (3.28)
one gets∂H∂Pα
=cPα
√−P ·P
,∂H∂xα
= − ∂U∂xα
= −Kα; (3.29)
thus the differential systems (3.24) and (3.26) coincide.The dynamical equations (3.26), which summarize the conservative case
from an absolute point of view, give an example of Hamiltonian system notequivalent to a Lagrangian one. In fact, the possibility to reduce it to aLagrangian form is subject to the invertibility of the relations:
qα =∂H∂Pα
(in our case dxα
dτ = ∂H∂Pα
). This corresponds to the requirement that det||∂2H/∂Pα∂Pβ || �= 0; in our case, instead, we have
∣∣∣∣∣∣∣∣ ∂2H∂Pα∂Pβ
∣∣∣∣∣∣∣∣ = 0 . (3.30)
The proof follows easily once the second derivatives of H are directly evalu-ated. In fact, from (3.28) and (3.29) we have
∂2H∂Pα∂Pβ
=c
P
(mαβ +
PαP β
P 2
), P =
√−P ·P , (3.31)
from which one gets the result:
∂2H∂Pα∂Pβ
Pβ =c
P
(Pα +
PαP β
P 2Pβ
)=
c
P(Pα − Pα) = 0 .

3.5 The Conservative Case. Hamiltonian Formulation 119
Thus, for an arbitrary choice of the Pβ variables, the system
∂2H∂Pα∂Pβ
Xβ = 0 , (α = 0, 1, 2, 3) ,
of four linear and homogeneous equations in the four unknown Xβ admitseigensolutions (it is satisfied for Xβ = Pβ �= 0). Thus condition (3.30) issatisfied, as it can be shown by using (3.31).
Similarly, the same result can be easily obtained by noticing that the func-tions at the right-hand side of (3.24)2, i.e. the derivatives ∂H/∂Pα, besidesbeing regular when P �= 0, are homogeneous of zero order in the Pα. Itfollows, from one side, the impossibility to obtain the momenta Pα (all in-dependent) as functions of the velocity V α (subordinated to the conditionmαβV
αV β = −c2); from the other side, using the Euler theorem:
∂
∂Pβ
(∂H∂Pα
)Pβ = 0,
we get again (3.30).However, being H(x, P ) independent of the parameter τ , the canonical sys-
tem (3.26) admits the generalized integral of the energy:
−H = c√−mαβPαPβ + U(x) = const. = h , (3.32)
for all the solutions of (3.26).This can be seen also from (3.8)1 which, in the conservative case, assumes
the formdE0dτ
= −dUdτ
, → E0 + U = const.
We notice that the fact that the (conservative) point particle dynamics canbe formulated in Hamiltonian and not in Lagrangian terms can be physicallyinterpreted in the sense that, at least from the absolute point of view, thewave aspect of matter should be preferred, with respect to the particle one.In fact Pα, being a covariant vector, defines a three-dimensional hypersurface(or wave front), locally associated to the world line �+ (ray); in turn, theelementary wave, is perpendicular to �+.
The intrinsically conservative case suggests the idea of more general parti-cles described by a Hamiltonian function H(x,P, τ), which is not separablelike H. In this case, the associated Hamiltonian system, starting from theinitial conditions E0 and P0, characterizes a world line �+ (ray) and an ele-mentary wave, not necessarily orthogonal to �+. For instance, this is the caseof spinning test particles for which P is no more tangent to the ray but alsotransports the proper material energy of the particle, related to the normof P.
Note. The first integral (3.32) reduces the rank of the Hamiltonian system(3.29) by a number of two, so that the integration of the system is equivalent

120 3 Test Particle Dynamics
to that of an Hamiltonian system of six equations in six unknown, followedby a quadrature. More precisely, one must solve (3.32) with respect to one ofthe Pα, e.g. P0:
P0 = H(xα, Pi, h) , (3.33)
and hence consider the reduced Hamiltonian H. After this, assuming as inte-gration variables x0 (in place of τ), we have the reduced system:
dxi
dx0= − ∂H
∂Pi,
dPi
dx0=∂H∂xi
(i = 1, 2, 3) , (3.34)
from which one can derive the solution: xi = xi(x0), Pi = Pi(x0). The latterfunctions, in turn, inserted in (3.33), allow to express P0 as a function of x0,too, and hence also the energy H of (3.27). Thus, performing a quadratureon the original equation dx0/dτ = ∂H/dP0 (where the right-hand side is aknown function of x0), one gets the relation between x0 and τ .
We notice that the system (3.34) does not admit the energy integral, becauseH explicitly depends on x0; moreover, from the relation x0 = ct, this systemrepresents, practically, the relative dynamics with respect to any Galileanframe, as it will be better discussed in Sect. 3.9. Thus, in the intrinsicallyconservative case, differently with respect to the absolute dynamics, it is therelative one, described by a regular Hamiltonian system, which is not singular.In any case, differently from the ordinary conservative case, such formulationresults invariant with respect to the choice of the frame.
3.6 The Relative Formulation of the Dynamics
We have now the problem to formulate the fundamental equations of thepoint particle dynamics, in a three-dimensional sense, that is with respect toa Galilean frame. This is in order to obtain relations which can be tested in aGalilean laboratory and also to see the difference with respect to the classicalformulation.
Because of the extended relativity principle, these equations should be for-mally invariant passing from one Galilean frame to another; therefore thevalues of the various involved quantities will change, differently from the ab-solute formulation.
As already stated, to fix a Galilean frame is equivalent to select, in C+3 ,
the timelike unit vector γ; for a generic motion (�+,m0) then the followingdecomposition of the 4-velocity V arises:
V = η(v + cγ) , η =1√
1− v2/c2, (3.35)
where η is the Lorentz factor; similarly, for the 4-momentum one has P =m0V = m(v + cγ), where

3.6 The Relative Formulation of the Dynamics 121
m = ηm0 (3.36)
is the relative mass of the particle. By defining{p = mv relative 3-momentum
E = mc2 relative material energy,(3.37)
one also gets the following decomposition of the 4-momentum:
P = p +Ecγ , (3.38)
which states that the spatial component of the 4-momentum is the relative3-momentum, while the temporal one is the relative material energy, a partfor the factor of c. Clearly, as m = ηm0, we have E = ηE0.
In the fixed Galilean frame, the global time coordinate t is given; hence, theworld line of any particle can be parametrized by t: τ = τ(t). The absoluteequation of motion dP/dτ = K, using (3.38) and the relation dt/dτ = η,then, becomes
dpdt
+1c
dEdtγ =
1ηK ;
from here, splitting K in its components along γ and into Σ:
K = KΣ − (K · γ)γ, KΣ = PΣ(K) (3.39)
the two equations (one vectorial on Σ, and the other scalar) follow:
p =1ηKΣ , E = − c
η(K · γ) , (3.40)
where a dot means differentiation with respect to t. Defining the relativemechanical force,
F =1ηKΣ , (3.41)
Equation (3.40) assumes the Newtonian form of the theorem of linear mo-mentum:
p = F . (3.42)
In the limit c → ∞, one has F = KΣ, and the criterion of re-obtaining theclassical (vectorial) quantity as the limit of the spatial part of the relativistic(4-vectorial) quantity is satisfied. In the case of V, similarly,
v = limc→∞
1ηV.
From (3.40)2, using the relations cγ = V/η − v, and K · v = KΣ · v, we have
− cηK · γ = F · v − 1
η2K ·V .

122 3 Test Particle Dynamics
Thus, defining the relative thermal power:
q = − 1η2
K ·V , (3.43)
Equation (3.40)2 assumes the classical form of the energy theorem:
E = F · v + q . (3.44)
We notice that, even in the “Newtonian form”, the relativistic point dynamicsformulation, summarized by (3.42) and (3.44), is different from the classicalone, also because of the widening of the scheme (particles with scalar struc-ture, i.e. with m0 not a constant): for (3.42), the main difference is that,in the linear momentum p = mv, the mass m is not a constant, but (ex-plicitly) depends on the relative velocity and on the time t through m0:m = m0(t)/
√1− v(t)2/c2. Note that the dependence on v remains also in
the most simple case of particles without internal structure, for which m0
becomes a characteristic constant.Equation (3.44) appears deeply modified, for two reasons: (1) the energy of
the particle E does not coincide with the ordinary kinetic energy mv2/2; (2)at the right-hand side appears the thermal power q which should be added tothe ordinary mechanical power F · v. The source of the energy is, then, thewhole power:
W = F · v + q , (3.45)
so that the decomposition of the 4-force becomes
K = η
(F +
Wcγ
). (3.46)
We emphasize the fact that F is the source of linear momentum and notof velocity because of the variability of the relative mass m. In any case, inagreement with the absolute formulation (3.8), also from the relative point ofview, the physical action, represented by the 4-force K, has the two effects of(1) accelerating the particle, (2) modifying its material energy:
E =E0√
1− v2
c2
. (3.47)
From this point of view, because of the presence of the term q, that is becauseof the variability of m0, as from (3.8)1, we have
c2dm0
dτ= q0 , q0 = η2q . (3.48)
Equation (3.44) is independent of that of the linear momentum, differentlyfrom the classical situation. However, the presence of q, that is a first link

3.6 The Relative Formulation of the Dynamics 123
between mechanics and heat theory, is not the unique fundamental novelty ofthe relativistic pointlike scheme. The other conceptual aspect, not less impor-tant than the previous one and certainly more general because it is presentalso for particles without internal structure, is the fact that the energy E andthe mass m of the particle differ by a multiplicative constant, as if they weretwo different aspects of the same physical quantity (equivalence between massand energy).
Clearly, E contains either the rest energy E0 = m0c2 (intrinsic) or the (rela-
tive) kinetic energy, due to the relative velocity of the particle: v. The relationwith the ordinary kinetic energy is immediately obtained, with an expansionof the right-hand side of (3.47) up to the first order in v2/c2. In fact, one hasthe approximated relation:
E = E0 +12m0v
2 , (3.49)
which shows, for slow motions v2 � c2, two main terms: the proper mate-rial energy m0c
2 and the relative kinetic energy T = m0v2/2. From here it
follows the closeness of (3.44) with the classical energy theorem; this is thenstrengthened in the case m0 =constant, where E0 = 0, and hence E = T . Therelative material energy as a function of v is plotted in Fig. 3.2.
In particular, one haslimv→cE(v) = +∞ .
This result confirms that a material point cannot reach the speed of light,unless its relative material energy becomes infinite. Analogously, m = E/c2is the inertial mass which measures the increasing difficulty of the point tofurther accelerate when its speed becomes close to that of the light, in a givenGalilean frame. From this point of view, one may consider, as more significant,the absolute parameter m0, which measures the classical inertia and gives riseto a hierarchy of particles, without internal structure.
O
Vmoc2
ξ
Fig. 3.2. The relative material energy plotted as a function of v

124 3 Test Particle Dynamics
We notice that the various definitions introduced above, all have a realphysical content: they establish the physics laws from a relative point of viewin a form close to their Newtonian counterparts, in agreement with extendedprinciple of relativity. In particular, the Einsteinian equivalence, between massand energy, can be easily derived from a general principle of mass and energyconservation, valid for isolated systems.
In other words, if in the ambit of an isolated system, one has increment ofmaterial energy ΔE , in correspondence, a mass defect ΔE/c2 is created: thiseffect has been widely confirmed in experiments.
3.7 Transformation Laws: Unification BetweenMechanics and Heat Theory
The relative formulation of the dynamics of material point with scalar struc-ture m0 is summarized by the two independent equations (one scalar and theother vectorial):
ddt
(mv) = F ,dEdt
= F · v + q =W ∀Sg . (3.50)
They are formally invariant with respect to the choice of any Galilean frameSg, passing to another Galilean frame, S′
g, is equivalent to put a prime on allthe various quantities in (3.50). They are not substantially invariant becauseall the various quantities appearing in (3.50), including t and v, have a relativemeaning. Thus, it is necessary to specify, as we have already done for t andv, the transformation laws of the fundamental quantities p, F, E , q.
Let us start with transformation law of the mass m. From (3.36), we have
m =m0√
1− v2/c2, m′ =
m0√1− v′2/c2
;
thus, by eliminating m0 (invariant, once specified the event E of the worldline):
m′ =
√1− v2/c2√1− v′2/c2
m .
Moreover, from (2.105), it results√
1− v2/c2√1− v′2/c2
=σ
α, σ = 1− u · v/c2 , α =
√1− u2/c2 , (3.51)
with u the relative velocity of S′g with respect to Sg. Hence,
m′ =σ
αm . (3.52)

3.7 Transformation Laws: Unification Between Mechanics and Heat Theory 125
From here it follows the introduction of the terminology of longitudinalmass or transversal mass of use in dynamics, when one passes from a Galileanlaboratory to another moving in the direction of v (v parallel to u) or in theorthogonal direction (v orthogonal to u).
The classical invariance of the mass comes from (3.52), in the limit c→∞:
limc→∞m′ = lim
c→∞m = m0 = inv.
From (3.52), after multiplication by c2, one gets the variation law of thematerial energy:
E ′ =σ
αE . (3.53)
Again, from (3.52), after multiplication by v′, and by using the relativisticaddition of velocity law,
v′ =α
σ
(v − 1 + σ/α
1 + αu), (3.54)
one gets the variation law of the linear momentum:
p′ = p− 1 + σ/α
1 + αmu . (3.55)
Let us pass now to thermal power q, defined by (3.43). We have
q = q0(1− v2/c2) , q′ = q0(1− v′2/c2) ,
where q0 is a local invariant of the particle, called the proper thermal power:
q0 = −K ·V . (3.56)
The variation law of the thermal power follows, from the above relations, byeliminating q0:
q′ =(ασ
)2
q . (3.57)
The remaining task is that of finding the transformation law of the relativemechanical force. From the invariance property of K, by (3.46), one gets
η
(F +
Wcγ
)= η′(F′ +
W ′
cγ′)
= inv. ;
thus, from (3.51), it results
F′ +W ′
cγ′ =
α
σ
(F +
Wcγ
).
Finally, projecting on the basis {c′α}:

126 3 Test Particle Dynamics
γ′ =1α
(γ + βc1) , c′1 =1α
(c1 + βγ), c′2,3 = c2,3 ,
the following relations are obtained:⎧⎪⎪⎨⎪⎪⎩
1cW ′ =
1σ
(1cW − βF1
)
F ′1 =
1σ
(F1 −
β
cW), F ′
2,3 =α
σF2,3.
From here, one gets immediately the variation law of the total power W :
W ′ =1σ
(W − F · u) . (3.58)
For the remaining relation, we can write
F1 = αF1 + (1− α)F1
= αF1 +1− α2
1 + αF1
= αF1 +1c2
u2
1 + αF1
= αF1 +1c2
u ·F1 + α
u .
Interpreting now the components of F′ in Sg, instead of S′g (i.e. boosting Σ′
on Σ), one gets the relation:
F′ =1σ
[αF +
1c2
(u · F1 + α
−W)
u]. (3.59)
We notice that (3.58) can be derived directly from (3.54), (3.57) and (3.59),and taking into account the meaning of W . However, (3.59) shows that, dif-ferently from q′, the mechanical force F′ depends not only on F but also onthe thermal power q. In fact, we have
F′ =1σ
[αF− 1
c2(F ·w + q)u
], (3.60)
wherew def= v − 1
1 + αu . (3.61)
The following fundamental fact arises, as a peculiarity of the relativistic sit-uation: in the framework of special relativity, it is meaningful to formulate atheory for pure mechanics, while it is a nonsense to formulate a theory forheat, only. In fact, from (3.57), we have that q = 0 implies q′ = 0, and viceversa: the presence or the absence of a physical action of thermal type is an

3.8 The Cauchy Problem in Relative Dynamics 127
intrinsic fact. The same is not true for the mechanical force F: if it is absentin a frame, in general it is not into another:
F = 0 ⇒ F′ = − 1c2q
σu �= 0 ,
even if a very small, i.e. of the order 1/c2. In a relativistic framework, then,from pure mechanics, one is naturally driven into thermomechanics (q �= 0).This situation is somehow similar to the electromagnetism: it is a nonsense,from a relativistic point of view, to develop a theory for the electric field only orthe magnetic field only, but the really meaningful theory implies the presenceof both fields. This of course will not exclude the possibility of having, in acertain frame of reference, electric or magnetic field only.
3.8 The Cauchy Problem in Relative Dynamics
Let us consider now the general equations for point dynamics (3.50), in ageneric Galilean frame, assuming that both the frame (i.e. γ) and the force law(i.e. K = K(τ, E,P)) are assigned. Clearly, the component KΣ = K+(γ ·K)γhas the same dependence of K. The mechanical force F = 1/ηKΣ seems tohave, in addition, the dependence on v, through η; however, if V and m0 areknown, assigned γ, also v (and m = ηm0 and E = mc2, as well) is known.Thus, F has exactly the same dependence as K, and the same is true forq = −K ·V/η2. In relative terms, the variables τ, E,P are equivalent to theordinary quantities P (position), p (linear 3-momentum), E (material energy)and t (universal time of the frame); in fact, from E one gets P and t, from Pone has p and E , and finally from τ one gets t. In this sense, in the restrictedproblems, the relative force F and the relative heat power q have the followingdependence:
F = F(x, p, E , t) , q = q(x, p, E , t) (3.62)
or, equivalentlyF = F(x, x, E , t) , q = q(x, x, E , t) , (3.63)
taking into account that p summarizes v and m, or E .From the latter point of view, (3.50) can be cast in scalar terms, in the
following second-order system for the unknown xi (i = 1, 2, 3) and E :
ddt
(Ec2xi
)= F i ,
dEdt
= Fixi + q , Fi = δikF
k . (3.64)
The similar formulation (first-order ordinary differential system of seven equa-tions for seven unknowns, in the variable t), in terms of position xi, linearmomentum pi = δikp
k and energy E , appears to have more physical meaning:
xi =c2
E δikpk , pi = Fi(x, p, E , t) , E =
c2
E Fipi + q(x, p, E , t) . (3.65)

128 3 Test Particle Dynamics
For this system, similarly to the corresponding absolute one, the Cauchy prob-lem arises associated with the initial conditions:
xi = xi0 , pi = pi,0 , E = E0 at t = t0 . (3.66)
Obviously, because of the meaning of the pi and E = mc2, subordinated atthe condition 1− v2/c2 > 0, we have
Xdef= 1−
(cpE
)2> 0 (p2 = δikp
ipk) , (3.67)
and the initial data cannot be arbitrary, but they must satisfy the limitations:
X0 = 1−(cp0
E0
)2
> 0 , E0 > 0 , (3.68)
and this is a big difference with respect to the classical situation.Equation (3.68) implies that a discussion on dynamically possible motions
can be started on the basis of (3.65), but then at any instant, the constraint(3.67) should be verified. It should be noted that, differently from the problem(3.8) for the absolute dynamics where the conservation equation 1+V·V/c2 =0 was present, in the case under consideration here, (3.67) gives an effectiveunilateral constraint. The unilateral character of the constraint excludes thepossibility of reactions, but it creates a problem completely different fromthe previous one. In any case, the system (3.65) implies, for the variableX = 1− c2p2/E2, the following first-order (linear, inhomogeneous) differentialcondition:
X = −2c2
E2(XF ipi − p2q/E) ; (3.69)
this relation involves either the mechanical force or the thermal power (see(3.62) and shows that the initial value,
Y0def= X0F
i0pi,0 − p2
0q0/E0 , (3.70)
plays a central role, discriminating the case X(t) increasing (that is an alwayspositive X), from the decreasing one, in which there can exist critical pointsX = 0 starting from which the solution may be meaningless.
Another form of the system (3.65), which will allow to avoid the constraint(3.67), is obtained assuming as variables xi, pi and m0, in place of xi, pi andE . In this case, both the energy E = mc2 and the mass m = m0/
√1− v2/c2
should be expressed in terms of the new variables; otherwise, from
m =m0√
1− p2/(m2c2)=
m0m√m2 − p2/c2
,
it results m2 − p2/c2 = m20, so that
m =√m2
0 + p2/c2 , p2 = δikpipk . (3.71)

3.9 The Intrinsically Conservative Case 129
Taking into account (3.65)2, and by differentiating, one gets the followingrelation:
m =1m
(m0m0 +
1c2piFi
),
which maps the energy theorem (3.65)3 into the form: m0m0 = qm/c2. Thus,system (3.65) transforms as
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
xi =δikpk√
m20 + p2/c2
pi = Fi(x, p,m20, t)
(12m
20
).= 1
c2
√m2
0 + p2/c2 q(x, p,m20, t).
(3.72)
In this last formulation, m0 appears through the power m20, allowing the
treatment to be valid for both particles (m0 > 0) and exotic particles (m0 <0). Moreover, the constraint (3.67) rewritten into the form,
1− p2
p2 +m20c
2,
is automatically included in (3.72)1, so that the initial data xi0, pi,0 and m0,0
are completely free, a part from the condition m0,0 �= 0.
3.9 The Intrinsically Conservative Case
In the general formulation (3.72) and (3.65), the functions at the right-handside are more or less complicated according to the expression of the 4-forcelaw K(E,P, τ). Therefore, they are simplified when K is special, for instancepositional and conservative:
Kα =∂U∂xα
(α = 0, 1, 2, 3) . (3.73)
Let us examine this latter case, assuming that the Cartesian coordinates xα
were internal to the frame: γ = c0. From the general relations given in (3.46)
Fi =1ηKi , q = − 1
η2K ·V = − 1
η2
dUdτ
,
and using (3.71) to express η, we have
η =
√1 +
p2
m20c
2, (3.74)
so that one obtains the following expressions for the mechanical force and thethermal power, respectively:

130 3 Test Particle Dynamics⎧⎨⎩Fi = (1 + p2/(m2
0c2))−1/2 ∂U/∂xi (i = 1,2,3)
q = −(1 + p2/(m20c
2))−1/2 ∂U/∂t.(3.75)
Equation (3.75)1 shows that the mechanical force F is neither positional norconservative. However, it comes from the potential
U(x, p,m0, t)def= (1 + p2/(m2
0c2))−1/2U(x, t) , (3.76)
which depends on the time t and both pi and m0, through the ratio p2/(m20c
2).Thus, in any Galilean frame, system (3.72) simplifies as:
xi =δikpk√
m20 + p2/c2
, pi = ∂U/∂xi , m0c2 + U = const. , (3.77)
while system (3.65) assumes the form:
xi =c2
E δikpk , pi = ∂U/∂xi, E = −∂U/∂t , (3.78)
with the same initial conditions (3.66), as well as the limitations (3.67) and(3.68). Obviously, in order to explicitate the system, one should consider U =√
1− c2p2/E2 U(t, x). In any case, even if system (3.77) is formally invariantpassing from one Galilean frame to another, the characteristic function U =U/η is not invariant (it is instead invariant the absolute potential U(E)). Thus,from (3.76) the invariance property ηU = η′U ′ = inv. follows; in other words,taking into account (3.51), the transformation law of the relative potential isthe following:
U ′ =α
σU , (3.79)
with the functional identity being subordinated to the Lorentz transforma-tions. Finally, let us note that, by eliminating m0 using the energy theorem,system (3.77)1,2 does not assume a Hamiltonian form.
3.10 Pure Mechanics: Particles with Scalar Structure
As we have already stated, in a relativistic framework, a “pure mechanics” isobtained excluding thermal actions, i.e. assuming
q = − 1η2
K ·V = 0 . (3.80)
This is the ordinary pointlike scheme (material point, without internal struc-ture); in fact, (3.80) implies, for (3.72)3, the condition m0 =const., as from(3.8)1. In other words, (3.80) gives to the energy theorem the classical form,

3.11 The Conservative Case in a Classical Sense 131
but with a different content for the energy E : E = Fivi, and this, in turn, is
equivalent to the condition m0 = 0, that is m0 =const.In this case (particles without internal structure: m0 = const. and q = 0),
the energy theorem follows from the equations of motion (3.72)1,2:
xi =δikpk√
m20 + p2/c2
, pi = Fi(x, p, t) (i = 1, 2, 3) . (3.81)
In these last equations, m0 is a “structural” constant, characteristic of theconsidered particle, with the material energy E = mc2 given by the formula:
E = c√m0c2 + p2 , p2 = δikpipk . (3.82)
Equation (3.81) ensure the invariance property of the more general (3.65),passing from a Galilean frame to another. This invariance is but, only formaland not substantial. For instance, in S′
g, according to (3.60), the mechanicalforce is given by:
F′ =1σ
[αF− 1
c2F ·(v − 1
1 + αu)]
, (3.83)
and so the mechanical power is
W ′ =1σ
(W − F · u) , (3.84)
differently from the classical situation, where F′ = F and W ′ =W − F · u.
3.11 The Conservative Case in a Classical Sense
Let us consider now, in the context of pure mechanics (q = 0), the specialcase in which the mechanical force, relative to Sg, comes from a potential U :
Fi =∂U(x)∂xi
, (i = 1, 2, 3) . (3.85)
Obviously, this is not an absolute property because it strictly depends on thechoice of the Galilean frame. That is, the hypothesis (3.85) destroys the formalinvariance of the dynamical equation (3.81). In fact, from (3.83), as soon asu �= 0 (i.e. S′
g �= Sg) the mechanical force F′ acquires a dependence on v′,either explicitly or implicitly, through σ, and hence it is no more conservative.
Even with this limitation, which makes Sg a preferred frame, the conserva-tive case is still important, as in the classical case, and gives rise to a canonicalsystem. In fact, by introducing the total relative energy
H = mc2 − U = c√m0c2 + δikpipk − U(x) , (3.86)

132 3 Test Particle Dynamics
system (3.81), rewritten in the following form:
xi =cδikpk√
m0c2 + δjlpjpl
, pi =∂U
∂xi, (3.87)
assumes the Hamiltonian form:
xi =∂H
∂pi, pi = −∂H
∂xi. (3.88)
Actually, from (3.86):⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
∂H
∂pi=
cδikpk√m0c2 + δjlpjpl
∂H
∂xi= − ∂U
∂xi,
(3.89)
which completes the proof. In the limit of slow motions, the Hamiltonianfunction reduces, as from (3.49), to the classical formula for the total energyof a material point in a conservative field (a part for the constant rest energym0c
2):
H � m0c2 +
12m0v
2 − U .
However, the conservative case (3.85) is different from the intrinsically con-servative one not only as concerns the invariance but also because the function(3.86) has a nonzero Hessian determinant, differently fromH defined in (3.27).That is, (3.87)1 is invertible and gives rise to the relations:
pi ≡ mvi =m0δikx
k√1− δikxixk/c2
; (3.90)
moreover, the Hessian ofH , with respect to the components of the momentum,has to be different from zero. In fact, assuming m(p) =
√m2
0 + p2/c2, so that∂H/∂pi = pi/m(p), it is easy to show that
∂2H
∂pi∂pk= − 1
m3c2pipk +
1mδik . (3.91)
Thus, the matrix∣∣∣∣∣∣ ∂2H
∂pi∂pk
∣∣∣∣∣∣ has the form ||aik + λδik|| and, using the generalrelation
det ||aik + λδik|| = λn + I1λn−1 + · · ·+ In−1λ+ In , (3.92)
with n the matrix order, and I1, . . . , In the principal invariants of aik (withrespect to the matrix δik). In the present case, λ = 1/m, n = 3, aik =−pipk/(m3c2), and it results in

3.11 The Conservative Case in a Classical Sense 133
I1 = − p2
m3c2, I2 = 0 , I3 = 0 ;
so that, from (3.92)
det∣∣∣∣∣∣∣∣ ∂
2H
∂pi∂pk
∣∣∣∣∣∣∣∣ =(
1m
)3
− p2
m3c2
(1m
)2
=m2
0√(m2
0 + p2/c2)5> 0 .
Thus, differently from the intrinsically conservative case, the canonical system(3.88) is equivalent to a Lagrangian system, with Lagrangian:
L = [L]pi=pi(q,q,t) , Ldef=
∂H
∂pipi −H ,
where the relations pi = pi(q, q, t) are obtained by solving the equations qi =∂H/∂pi with respect to the p+ when this is possible as it is in the presentcase. It follows
L = xipi(x, x, t)− [H ]pi=pi(x,x,t) ;
using, then, (3.86) and (3.90), one gets
L =m0
1− v2/c2(δikxixk − c2) + U(x) = −m0c
2√
1− v2/c2 + U(x) . (3.93)
The associated Lagrange equations,
ddt∂L∂xi− ∂L∂xi
= 0 , (3.94)
give, clearly, the theorem of momentum:
ddt
(mxi)− ∂U
∂xi= 0 , (3.95)
i.e. give rise to a second-order normal differential formulation of the dynamicsin the unknown xi(t). More precisely, taking into account the energy theorem:
E = Fixi =
∂U
∂xixi ≡ U , (3.96)
one can rewrite (3.95) in the form
mxi =∂U
∂xi− 1c2U xi =
∂U
∂xi− 1c2∂U
∂xkxixk ,
and thus, they are equivalent to the following second-order, normal system:
m0xi =√
1− δikxixk/c2(δik − 1
c2xixk
)∂U
∂xk. (3.97)
Such a system, in the considered Galilean frame, admits the energy integral,as it follows from (3.96): E − U = const., that is,

134 3 Test Particle Dynamics
m0c2√
1− δikxixk/c2 − U(x)= const. (3.98)
for all the solutions of (3.97); furthermore, the Lagrangian function (3.93) doesnot explicitly depend on the time, so that system (3.94) admits the generalizedenergy integral:
H(x, x) =∂L∂xi
xi − L = const. , (3.99)
for all the solutions of (3.94), and this coincides with (3.98). Similarly, in termsof canonical variables, being t an ignorable coordinate in the Hamiltonianfunction (3.86), the associated system (3.88) admits as a first integral thesame function H(x, p):
c√m0c2 + δikpipk − U(x) = const. (3.100)
for all the solutions of (3.88). This allows to express, for all dynamical solution,p2 = δikpipk as a function of the position and the initial data.
3.12 Classical Approximation
As in the conservative case of pure mechanics discussed in (3.97), also in thegeneral case (F �= 0, q �= 0), the dynamical equations can be written in termsof the four variables xi and E , or in terms of xi andm0. One has to use directly(3.64), which gives rise to the following, normal form, differential system:⎧⎨⎩
1c2 E xi =
(δik − ds 1
c2 xixk)Fk(x, x, E , t)− 1
c2xiq(x, x, E , t)
E = Fkxk + q,
(3.101)
or, equivalently, ⎧⎨⎩
1c2Ea = F− 1
c2(F · v + q)v
E = F · v + q.
(3.102)
Assuming instead, as variables xi and m0, and using (3.72), the fundamentalsystem (3.101) can be written as⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
m0xi =
√1− v2
c2
[(δik − 1
c2xixk
)Fk(x, x,m0, t)−
1c2qxi
]
m =1
c2
√1− v2
c2
q(x, x,m0, t) (v2 = δikxixk),
(3.103)
which shows the meaning of m0 as the inertial mass for any choice of theGalilean frame. In particular, in the Galilean frame in which the particle is at

3.13 Unified Scheme: Particles and Photons 135
rest γ = V/c, such that v0 = 0 and a0 = A, and using (3.41) and (3.43), onegets
F0 = KΣ = K +1c2
K ·VV , q0 = −K ·V ,
and (3.103) become
m0a0 = F0 , m0 =1c2q0 , (3.104)
which are equivalent to the original absolute formulation (3.8). We note that(3.104)1 gives again, in the relativistic framework, the classical law ma = F,even if this result holds in a particular Galilean frame, variable with theparticle. Conversely, this may give a criterion to extend, in relativity, theclassical physics laws, according to which one can consider the classical lawsstill valid, but only with respect to the Galilean frame in which the par-ticle is at rest. Then, the formulation can be extended to any Galileanframe, by considering the transformation laws of the various quantities in-volved.
Finally, it is also worth to note that, in the limit c → ∞, the formulation(3.103) is equivalent to the classical case:
m0xi = F i , m0 = m = const. , (3.105)
from which the inertial meaning of m0 is confirmed and its purely mechanicalmeaning too, without the thermal coupling.
3.13 Unified Scheme: Particles and Photons
Within the particle scheme, considered up to now, we have excluded boththe cases m0 < 0 and m0 = 0. The first case (m0 < 0) can be taken intoaccount, without significative changes in the scheme considered, above andit represents exotic matter, or particles with negative material energy (andhence not too much physically relevant). The second case (m0 = 0) must bediscussed separately because in this case some fundamental quantities, like the4-momentum, loose their direct meaning. Allowing to consider also particlewith very small masses, it is quite natural to consider the case m = 0 asa limiting one of the particle scheme. From this point of view, taking intoaccount the relation
m =m0√1− v2
c2
,
it is clear that, if v < c, the limit m0 → 0 implies m → 0 too, in everyGalilean frame; a particle which would correspond to such a model will notbe physically observable. As a consequence, if one would like to consider a

136 3 Test Particle Dynamics
physically compatible scheme, also for the casem0 = 0, one should allow v = c.This observation suggests the corresponding scheme, for the casem0 = 0, thatis a scheme apt to represent particles moving at the speed of light. This is thecase of photons, introduced by Einstein in 1905 to explain the photoelectriceffect.
They are, then, limiting particles (m0 → 0 and v → c, so that m will befinite and nonzero), for which the world line is lightlike:
λ · λ = 0 , λ =dEdλ
. (3.106)
Therefore, for these particles, one cannot introduce the notions of proper timeτ and 4-velocity V. Similarly, the 4-momentum P = m0V is meaninglessbecause it is derived from m0 and V. Properly speaking, even if both m0
and V have no more meaning, their product may have. In fact, for a genericparticle, the 4-momentum P can be written as
m0V = m0λdλdτ
, dτ =1c
√−λ · λdλ ,
and the scalar quantity, Pλ ≡ m0dλ/dτ , may have a physical meaning. ThenP = Pλλ can be meaningful in the limit m0 → 0 and dτ → 0 if the latter areinfinitesimal of the same order. From this point of view, which gives to P aprimitive meaning with respect to m0 and V, the following definition appearsquite natural for a particle with scalar structure: an oriented world line �+,timelike or lightlike, and a tangent (nonnull) vector field P(E). When �+ istimelike, one can introduce the (preferred) proper time parametrization, aswell as the 4-velocity V and the proper mass m0, defined starting from thedecomposition P = m0V. When, instead, �+ is lightlike, i.e. (3.106) holds, forany choice of the parameter λ along �+, the vector P remains tangent to �+,but is lightlike:
||P|| = 0 . (3.107)
Summarizing, in the unified scheme (material particles and photons), the fun-
damental ingredients are two: the oriented world line �+ and the field of tan-gent vectors P �= 0, with norm
||P|| ≤ 0 , (3.108)
with the equality holding for photons. Finally, if P is aligned along �+ andhas the same orientation, one speaks of particles, otherwise of exotic particles.
The condition P tangent to �+ represents a strong limitation for the par-ticle scheme. In fact, once introduced on �+ an arbitrary parameter λ, the4-momentum P is
P = Pλλ , λ =dEdλ
, (3.109)

3.14 Fundamental Invariants 137
for all parametric representation, with the scalar Pλ (assumed to be positive)naturally depending on the chosen parametric representation. That is, fromthe invariance of P: Pλλ = Pλ′
λ′ = inv., and using the relation
λ = λ′ dλ′
dλ, (3.110)
one finds the transformation law for Pλ when λ varies:
Pλ′=
dλ′
dλPλ . (3.111)
This is the exactly the transformation law for vectors, which motivates thenotation for the position of the index λ. Taking then into account the positivityof the quantity dλ′/dλ also follows the invariance for the sign of Pλ, whichsubstantiates the two different (but similar) schemes: Pλ > 0 (particle), andPλ < 0 (exotic particle). In the following, in order to avoid an indicatorε = ±1, we will restrict our attention only to particles: Pλ > 0.
3.14 Fundamental Invariants
The norm of P is a first absolute invariant for the unified particles, whichwe will show to be effective in the relative ambit only. More important is thedifferential invariant:
dλPλ
=dλ′
Pλ′ = inv. = I , (3.112)
and, by integrating along �+, the finite invariant I(E) > 0, defined up to anadditive constant
I(E) =∫ E
E0
1Pλ(λ)
dλ = inv. (3.113)
Vice versa, by differentiating the invariant (3.113), one gets the componentPλ of P:
dIdλ
= 1/Pλ , (3.114)
so that the unified scheme can also be characterized by the oriented worldline �+ (timelike or lightlike), endowed with a scalar invariant: I(E), whichassimilates the photons to the material particles; in particular, for the lattercase, the proper mass m0
def= P τ is contained in (3.114):
1m0
=dIdτ
. (3.115)
Obviously, because of the positiveness of Pλ, I is also an admissible parameterfor �+, and it is such that P becomes an exact derivative:
P = dE/dλ , P I = 1 . (3.116)

138 3 Test Particle Dynamics
In the quantum treatment of photons, the universal constant h (Planckconstant) plays a role:
h � 6.63 10−34 J · s (3.117)
with dimensions of an angular momentum (or of the action): [h] = [ML2T−1].We can include this constant in Pλ, by putting
Pλ =h
c2νλ , (3.118)
where the new quantity νλ is characterized by the same variation law of Pλ
at varying the parameter λ:
νλ′= νλ dλ′
dλ⇒ dλ
νλ= inv. (3.119)
It is easy to recognize that, if the parameter λ has the dimensions of a time,then νλ is a frequency. In fact, from one side, [P ] = [MLT−1] (being P alinear momentum) and from the other [P ] = [Pλ][Lλ−1], so that, if [λ] = [T ],it results
MLT−1 = [Pλ]LT−1 , ⇒ [Pλ] = M ,
and hence,[νλ] = [T−1] . (3.120)
Summarizing, the invariant (3.113) gives rise, by using (3.118), to anotherinvariant for both material particles and photons, that is the proper frequencyV > 0:
1V(E)
=∫ E
E0
1νλ(λ)
dλ = inv.ddλ
(1V
)=
1νλ
. (3.121)
The following relation holds
I(E) =c2
hV(E), (3.122)
so that, in the unified scheme, the invariant I can be replaced by V . Becauseof the different meaning of such invariants, P can be obtained starting from(3.109) and using conditions (3.114) and (3.122):
P I = 1 , PV =dVdI
= − c2
hI2. (3.123)
In the unified scheme, from the absolute point of view, the local invariants I,or V , play the role of the proper mass m0: hence, the latter has only a partialmeaning, like τ and V, for timelike world lines.

3.15 Particle and Photon Dynamics 139
3.15 Particle and Photon Dynamics
As concerns the absolute dynamics, in the unified scheme, one cannot use theproper time parametrization of the world line because this has no meaningon null world lines. It is necessary to use an arbitrary parameter λ, and torewrite (3.6) in the form:
dPdλ
= Kλ(λ,E,P) , (3.124)
assuming that this equation have absolute character, i.e. not depending on thechoice of λ. It follows that the 4-force Kλ should transform like a derivative,or with the covariance law:
Kλ′ = Kλdλdλ′
, (3.125)
complementary to (3.111), so that the parameter λ can be chosen arbitrarily.In particular, by using the canonical parameter I, the unified dynamics of
particles, in the ambit of restrict problems, is governed by the following setof equations:
dEdI
= P ,dPdI
= K(I, E,P) , ||P|| ≤ 0 , (3.126)
where K ≡ KI is the generalized 4-force, and dE/dI the analogous of the4-velocity. The absolute parameter I is defined by means of (3.113)–(3.114),both invariant with respect to the choice of λ, vice versa, (3.115) holds onlyfor material particles.
The unified treatment (3.126) includes, obviously, the energy theorem; infact, assuming
||P|| = −m20c
2 = −E2
c2, (3.127)
from (3.126)2 one obtains the relation
ddI
(12E2
)=
1c4q , q = −K ·P , (P =
dEdI
) , (3.128)
where the scalar q can be interpreted as proper thermal power. From this pointof view, which reintroduces the proper mass as a quantity derived from P,the photon is characterized by the condition m0 = 0, like a particle withoutinternal structure, which implies also q = 0 (absence of thermal interaction).
However, formulation (3.128) does not include the limitation ||P|| ≤ 0,which should be added to the equations. It uses, as a parameter for �+, theabsolute invariant I, which makes the mass as unit: P I = 1, but it doesnot have the dimensions of a time, and hence it cannot be considered as a

140 3 Test Particle Dynamics
substitute for the proper time. In any case, (3.122) defines a second invariant:V > 0 (absolute frequency), which also gives the temporal invariant:
Tdef=
1V > 0 , (3.129)
where V is defined by (3.121), in terms of P:
1V =
∫ E
E0
1νλ
dλ , νλ =c2
hPλ.
From here, by differentiating and using (3.159), one gets
dTdλ
=1νλ
> 0 ; (3.130)
Thus, together with I and V , also T is admissible along �+: this is an absolutetemporal parameter which, differently than the proper time, is meaningful alsofor photons. To it one can refer all the fundamental quantities for the unifiedparticles, starting from the frequency V , or the equivalent mass M = hV/c2which, in terms of T , have the following expressions:
V =1T, M =
h
c2T, (3.131)
withP = MV , V =
dEdT
. (3.132)
Hence, the absolute dynamics of unified particles is summarized by the follow-ing set of equations, similar to the canonical ones (3.126):
MdEdT
= P ,dPdT
= KT , ||P|| ≤ 0 , (3.133)
where M is now a known function of T . The limitation ||P|| ≤ 0 ensures thatthe world line of the particle is timelike or lightlike.
Finally, as concerns the relations with the proper mass m0 and the propertime τ of the material particles, from (3.132), we have MV = m0V, so that:
MV = cm0 ,ddτ
=c
Vd
dT. (3.134)
3.16 Unified Relative Dynamics of Particles
Differently from m0 (absolute quantity), the concept of relative mass m canbe introduced also in the unified scheme in any Galilean frame, that is alsofor photons (corpuscular theory of light). In fact, if a Galilean frame is fixed,

3.16 Unified Relative Dynamics of Particles 141
Sg(γ), and the �+ is parametrized by the coordinate time of the frame λ = t,(3.109), using also (3.118), becomes
P = P t dEdt
=hν
c2(v + cγ) ,
with ν the relative frequency of the particle (luminal or material) and v itsrelative velocity. Thus, in Sg, also for a photon, the ordinary decomposition(3.38) holds
P = p +Ecγ , p = mv , (3.135)
with the relative frequency or mass:
m = P t =dtdI
=hν
c2, (3.136)
together with the relative material energy, given by
E = mc2 = hν . (3.137)
We notice that the component P t = dt/dλ has either the meaning of relativemass or that or relative frequency, and both these quantities are well definedfor the unified particles.
Equation (3.137) shows that the energy of a photon is proportional to itsrelative frequency. Moreover, from (3.119), which gives the variation of thefrequency, with respect to that of the parameter along �+, one gets the vari-ation law of the frequency (and hence of the energy and of the mass) in theambit of the Galilean frames. In fact, using λ = t and λ = t′, respectively, itfollows: ν′ = νdt′/dt, i.e. using (2.102):
ν′ = ν1− u · v√1− u2/c2
, (3.138)
in agreement with (3.53). Equation (3.138) defines the transversal Dopplereffect.
As concerns the relative dynamics of particles, in the unified scheme, it isclear that, once fixed a Galilean frame, and using the associated time coordi-nate t, it is enough to put λ = t in (3.124), obtaining
P = Kt(t, E, P ) , ( ). =ddt
. (3.139)
From here, the relative equations of motion, using either (3.135), as well asthe decomposition of Kt along γ and onto Σ:
Kt = F +Wcγ . (3.140)
More precisely, (3.139), as for the case of material particles, splits into thetwo Newtonian equations:

142 3 Test Particle Dynamics
p = F , E =W , (3.141)
where the total power is given by
W = F · v + q , (3.142)
which defines the relative thermal power q, in terms ofW and F. Equivalently,as in (3.43), q is also given by:
q = −Kt ·dEdt
∼ q =(
dIdt
)2
q ; (3.143)
in fact, from (3.140) it follows:
Kt ·dEdt
=(F +
Wcγ
)· (v + cγ) = F · v −W .
Thus, also in their generalized form (to include material particles and pho-tons), the fundamental equations (3.141) are invariant with respect to thechoice of the Galilean frame; the invariance being formal and not substantialbecause of the relative meaning of the involved quantities. In particular, as(3.119) gave the variation law for the frequency (3.138) (and hence for theenergy and the mass), (3.125), for λ = t and λ = t′, gives the transformationlaws for the mechanical force F and the power W . In fact we have
F′ +W ′
cγ ′ =
α
σ
(F +
Wcγ
)(3.144)
from which, using the standard procedure, one gets again (3.58) and (3.59):⎧⎪⎪⎨⎪⎪⎩W ′ =
1σ
(W − F · u),
F′ =1σ
[αF +
1c2
(F · u1 + α
−W)
u].
(3.145)
Finally, from (3.142) and (3.143), we have the variation law of the thermalpower:
q′ =(ασ
)2
q , (3.146)
already found in the case of material particles. Equation (3.146) again gives,also for photons, the intrinsic meaning of the condition q = 0 (absence ofthermal actions). In fact, (3.141) can be written in the form: q = −K·P/(P t)2,that is
q = q/m2 , q = −K ·P , (3.147)
where q is the scalar invariant defined in (3.128) which, in the unified scheme,corresponds to the proper thermal power q0. However, the condition q = 0

3.17 An Alternative to the Unified Dynamics 143
which for material particles is equivalent to the invariability of the propermass m0, in the unified scheme, according to (3.126)3, corresponds to theconservation of the norm of P:
||P|| = const. = ||P0|| ≤ 0 . (3.148)
Because for a material particle we have ||P|| = −m20c
2, (3.148) shows thatphotons behave like particles without internal structure and with propermass m0 = 0. This is but only qualitative because for photons the notionof proper mass, as that of proper rest frame, have no meaning. We notice that(3.148), taking into account the definition of the characteristic function I(λ)and (3.126)1, implies that
||λ|| = ||P||(
dIdλ
)2
, (3.149)
or, in relative terms to Sg:
v2 − c2 = ||P||(
dIdλ
)2
; (3.150)
in particular, for material particles, from (3.114) and (3.136) we have
dtdI
= m =hν
c2, (3.151)
so that (3.149) assumes the ordinary form: m = m0/√
1− v2/c2.Finally, it is worth to mention that, in the unified scheme, the dynamical
source Kλ, satisfying the invariance property (3.125): Kλdλ = Kλ′dλ′ =inv.cannot be given, a priori, through the law Kλ = Kλ(λ,E,P); in fact, theconsidered scheme is not free, but constrained by the condition (3.108):
||P|| ≤ 0 .
Thus, it has partially the meaning of reaction to the constraint, a propertywhich is also inherited by F and q. This is specially true for the particleson the border (photons), where the constraint becomes bilateral, and from(3.135) implies p2 = E2/c2, or v = c.
3.17 An Alternative to the Unified Dynamics
In unified dynamics too one can consider a formulation similar to (3.81).First of all, (3.141) can be summarized by the following scalar relations, inthe variables xi, pi and m = E/c2:
xi =1mδikpk, pi = Fi(t, x, p,m) , m =
1c2W (t, x, p,m) , (3.152)

144 3 Test Particle Dynamics
with the constraint ||P|| ≤ 0, that is, from (3.135):
p2 −m2c2 ≤ 0 ∼ v2 ≤ c2 ; (3.153)
we see that such constraint does not represent a limitation for the relativetrajectory but only for the motion law. However, as in the ordinary case, theconstraint ||P|| ≤ 0 can be included in the dynamical equations, by using as aparameter ||P|| in place of m or E :
||P|| = m2c2 . (3.154)
One findsp2 −m2c2 = m2c2 , (3.155)
from which the value of m follows, having in addition the meaning of fre-quency: m = hν/c2, i.e.
m =
√m2 +
p2
c2. (3.156)
We notice that, at least for the material particles, m has the meaning of propermass, and it vanishes for photons; vice versa, the relative mass m is alwayspositive because for photons, one has v = c �= 0.
By differentiating (3.155), one gets
m =1
2m[(m2). + 2p · p/c2] ,
which maps system (3.151) in its equivalent form:⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
xi =δikpk√
m2 + p2/c2, pi = Fi(t, x, p, m2),
(m2). =2c2
√m2 + p2/c2 q(t, x, p, m2).
(3.157)
We easily recognize that the variables are changed and, in place of m, appearsthe absolute parameter m2; however, the differential system is still of the firstorder with mechanical and thermal sources given, separately, by Fi and q.
However, system (3.156) includes the constraint ||P|| ≤ 0; in fact, from(3.156)1, it follows that
(m2 + p2/c2)v2 = p2 ∼ m2v2 = (1− v2/c2)p2 ,
that is the restriction v2 ≤ c2, for all the solutions of the system. System(3.156), as the analogous (3.151), represents the relative dynamics of unifiedparticles, and the parameter m discriminates between material particles andphotons. For the latter case, one has m = 0 and q = 0 and the system (3.156)reduces to

References 145
xi = cδikpk/p, pi = Fi(t, x, p) , (3.158)
which implies v = c. It is then clear the role played by the covariant vector pi,which, with the direction, gives rise to the velocity vi along the ray (relativetrajectory of the photon), while with its norm gives the energy carried by theelementary surface, orthogonal to it, as from (3.155):
p2 = m2c2 . (3.159)
Differently, from (3.154), one finds p2 = (m2 − m2)c2, and the velocity alongthe ray is determined by pi and m.
References
1. C. Cattaneo, Appunti di meccanica relativistica, Ed. La Goliardica, Roma (1973).110
2. W. Rindler, Introduction to special relativity, Clarendon Press, Oxford (1982). 1103. C. Moller, The theory of relativity, Clarendon Press, Oxford (1952). 1104. G. Ferrarese, Lezioni di Meccanica Relativistica, Pitagora, Ed. Bologna (1985).

4
Applications
4.1 Principal Tetrad for Nonnull Curves in M4
One of the most interesting aspects of the mathematical methodology is thatof generalizing to any space a result introduced and verified in a particularframework. Such a stimulating procedure can be interpreted as the necessityof making universal certain concepts, eliminating eventual limits due to theframework where they have been first introduced.
In relativity, this happens very often; results and geometrical quantities,typical of the classical apparatus, are redefined in a completely different frame-work (for dimension and geometry), like the Minkowski space M4.
In a strictly geometrical ambit, a typical example of such extension is givenby the so-called Frenet–Serret formulas, fundamental for the intrinsic clas-sification of curves in M4. The extension is not difficult, when the curve istimelike (or spacelike): a well-determined tetrad corresponds, locally, to theprincipal triad of the ordinary case; actually, to the ordinary curvature andtorsion correspond generically three “curvatures”. Differently, the extensionfor lightlike curves, i.e. tangent to the lightcone, is not so simple. In this case,in fact, it is necessary to introduce quasi-orthonormal bases, or more generally,anholonomic bases, which are first attached to the curve and then, more andmore specialized, in order to be intimately related to the curve itself.
We will discuss here the nondegenerate case only. Without any loss of gen-erality, let us consider a timelike and future-oriented curve �+ representingthe world line of a material (or exotic) particle.
Let us recall that, in M4, an orthonormal frame is defined by an event Ω,taken as the origin, a timelike axis x0 and three mutually orthogonal spatialaxes xi (i = 1, 2, 3); all of them characterized by the unit vectors cα (α =0, 1, 2, 3). A world line, in M4, can be defined by the parametric equationsxα = xα(λ) (α = 0, 1, 2, 3), with λ a generic parameter. If the world line isnot lightlike, i.e.
mαβdxα
dλdxβ
dλ�= 0 , (4.1)
G. Ferrarese and D. Bini: Applications, Lect. Notes Phys. 727, 147–167 (2008)
DOI 10.1007/978-3-540-73168-9 4 c© Springer-Verlag Berlin Heidelberg 2008

148 4 Applications
as it is the case for �+ (timelike and future-oriented), one can consider a specialparameter s (curvilinear abscissa) invariant with respect to the choice of xα:
s = s0 +∫ λ
λ0
√−mαβ
dxα
dλdxβ
dλdλ ; (4.2)
the minus sign is necessary for timelike curves. Thus, assuming such a param-eter, one has
xα = xα(s) (α = 0, 1, 2, 3) ; (4.3)
i.e., using a shorten notation:
ΩE = ΩE(s) , (4.4)
so, with a prime, we will denote differentiation with respect to s. As in the or-dinary case, at each E ∈ �+, the unit tangent vector T and its first derivative,i.e. the curvature vector C, have a direct meaning:
T def=dΩEds
, C def=dTds
; (4.5)
the curvature vector C, in turn, gives rise to the unit vector N (principalnormal of the curve), as well as to the geodesic curvature C > 0 (we will notconsider here the case of a straight line: T = const.):
C = CN . (4.6)
The 2-plane, in E, containing the tangent vector and the principal normal,is still called osculating plane.
Let us consider, now, the hyperplane Π, defined by T and its first andsecond derivatives:
Π =< T,T′,T′′ > ; (4.7)
We assume �+ regular enough and generic, in the sense that the vectors T,T′ and T′′ are linearly independent. Furthermore, let us assume that eitherM4 or the hyperplane Π is (independently) oriented, so that a convenientnotation is M+
4 or Π+, respectively. It is possible, then, to consider a unitvector B, uniquely defined by the following three conditions:
1. B is orthogonal to both T and N;2. B ∈ Π;3. the triad (T,N,B) is congruent to Π+, say left-handed.
Finally, let D be the unit normal to Π, oriented so that the tetrad(T,N,B,D) is coherent with the orientation of M4. In this way, the fourvectors (T,N,B,D) uniquely define a basis, dependent only on the point Eand the curve �+, called the principal tetrad of the curve �+ in E. The two vec-tors B and D define, in E, two half lines: the binormal and the threenormal,respectively. The hyperplane Πn, spanned by N, B and D:

4.2 Frenet–Serret Formalism 149
Πn =< N,B,D > , (4.8)
is normal to T, and then elliptic.Our purpose is now that of deriving the expressions for the vectors N, B
and D, in order to obtain in M4 the analogous of the ordinary Frenet formulas.
4.2 Frenet–Serret Formalism
In the ordinary three-dimensional case, the Frenet–Serret formulas give, inintrinsic way, the derivatives (with respect to the curvilinear abscissa) of thevectors of the principal triad: t, n and b, in terms of the same triad. Similarly,for a curve in �+ ∈M4, endowed with a principal tetrad, one can evaluate thefirst derivatives of the corresponding vectors: T′, N′, etc.
The vector B, in turn, being contained in Π, can be expressed as
B = λT + μT′ + νT′′ ; (4.9)
so that, using the relation T′ = CN and its first derivative,
T′′ = C′N + CN′ , (4.10)
one gets the following expression for B:
B = λT + (μC + νC′)N + νCN′ .
From this relation, using the orthogonality of B and N, it follows:
μC + νC′ = 0 ; (4.11)
hence, B should be represented as
B = λT + νCN′ , (4.12)
that is N′ belongs to the plane spanned by T and B; moreover, scalar mul-tiplication of (4.12) by T gives 0 = −λ − νCN · T′ = −λ − νC2, that is:λ = −νC2. Thus, assuming C �= 0, both λ and μ can be expressed in termsof the curvature C and the parameter ν:
λ = −νC2 , μ = −νC′
C; (4.13)
then, (4.12) becomesN′ = CT + τB , (4.14)
where τ represents the first torsion of the curve:
τ =1νC
. (4.15)

150 4 Applications
Equation (4.14) gives the derivative of N and, apart from the signs, is similarto the classical formula. As concerns the derivative of B, because of (4.5)2and (4.14), we have
B′ ·T = −B ·T′ = 0 , B′ ·N = −B ·N′ = −τ ;
thus, definingβ = B′ ·D = −B ·D′ , (4.16)
we obtainB′ = −τN + βD . (4.17)
Finally, passing to D′, we have
D′ ·T = −D ·T′ = 0 , D′ ·N = −D ·N′ = 0 ,
so thatD′ = −βB . (4.18)
The Frenet–Serret formulas (see [1], pp. 8–12), then follow:
⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
T′ = CN , C > 0 ,
N′ = CT + τB ,
B′ = −τN + βD ,
D′ = −βB .
(4.19)
4.3 Curvature and Torsions
The scalar quantities C, τ and β are fundamental in the study of curves inM4 because (exactly like c and τ in the ordinary case) they allow an intrinsiccharacterization of the curve itself, up to a Lorentz transformation. In fact(4.19), completed with ΩE′ = T, form a well-determined first-order linearsystem in the unknown E, T, N, B and D.
From this point of view, (4.19) play an important role also in the absolutedynamic, giving the intrinsic equations of the motion, particularly importantin the presence of constraints (for example, when �+ belongs to a given hy-persurface in M4, etc.). In any case, how can one express the curvature andtorsions of �+, starting from the parametric equations (4.3) of the curve, andwhat is their geometrical meaning?
Let us notice, first of all, that the scalars C, τ and β do not depend on theorientation of the curve. In fact, changing the sign of the curvilinear abscissa,the vector T changes sign but T′ = C remains unchanged, and with this,both C and N are invariant because of (4.6). Analogously, B too changes sign

4.3 Curvature and Torsions 151
but B′ remains unchanged. D, instead, does not change: this implies, using(4.19)3, the invariance of τ and β.
From (4.19)1, being T′ spacelike (because it is orthogonal to T), one getsimmediately
C =√||T′|| =
√mαβ
d2xα
ds2d2xβ
ds2. (4.20)
As concerns τ , one can use (4.19)2, taking into account that N, and henceN′, is determined by differentiating (4.19)1:
N′ =1C
T′′ − C′
C2T′ . (4.21)
In fact, using the property ||T|| = −1 and (4.19)2, it follows:
τ = ±√| ||N′||+ C2| , (4.22)
where ||N′|| can be derived from (4.21):
||N′|| = 1C2||T′′||+ C′2
C4||T′|| − 2
C′
C3T′ ·T′′ ,
and thus, being
T′ ·T′′ =12(T′ ·T′)′ = CC′ ,
one gets the result
||N′|| = 1C2
(mαβ
d3xα
ds3d3xβ
ds3− C′2
). (4.23)
In this way, we have already determined C, τ and N′; thus, from (4.19)2follows B:
B =1τ
(N′ − CT) =1τ
(1C
T′′ − C′
C2T′ − CT
); (4.24)
finally (4.19)3 specifies either β or D:
β = ±√| ||B|| − τ2|; D =
1β
(B′ + τN
). (4.25)
Let us pass now to discuss the geometrical meaning of the curvatures.Clearly, for C and τ , we can repeat all that has been said in the ordinarycase (see [2], pp. 30–34): C > 0 measures the displacement of the curve �+
from the rectilinear behaviour (C is said the geodesic curvature); differentlyfrom C, τ can assume both signs: it measures the variation of the osculatingplane, i.e. the displacement of the curve from the plane behaviour. In fact,if τ = 0, from (4.19)2, one has N′ = CT, so that (4.19)1 implies that T′′
belongs to the osculating plane.

152 4 Applications
Also β can assume both signs; however, its absolute value has a meaningwhich can be obtained by proceeding in an analogous way as in the ordinarycase, for curvature and torsion, namely
|β| = limΔs→0
φ
|Δs| , (4.26)
where φ is the angle between the two hyperplanes Π and Π′, correspondingto the values s and s′ = s + Δs of the curvilinear abscissa; that is, φ is theangle between D and D′, both spacelike:
cosφ = D ·D′ . (4.27)
As for the ordinary torsion, the sign of β has a precise geometrical meaning. Infact, let us evaluate the signed distance δ(E,E′) of the generic point E′ ∈ �+from the hyperplane Π(E). We will assume such a distance as positive ornegative, corresponding to E′ placed, with respect to Π(E), in the same sideof (E,D) or in the opposite side, that is,
δ = EE′ ·D . (4.28)
The distance δ is a quantity of the fourth order in (s′ − s), so that to beevaluated it is necessary to expand EE′ up to the fourth order:
EE′ = TΔs+12T′(Δs)2 +
13!
T′′(Δs)3 +14!
T′′′(Δs)4 + ε5 ,
where ε5 is the rest in the Taylor series. From (4.19), one has T′ = CN,T′′ = C′N+C(CT + τB) and T′′′ = 3CC′T+ (C3 −Cτ2 +C′′)N+ (2τC′ +Cτ ′)B + CτβD; thus, substituting in the previous expression, leads to
EE′ = TΔs+12CN(Δs)2 +
13!
(CT + C′N + CτB)(Δs)3
+14!
[3CC′T + (C3 − Cτ2 + C′′)N
+(2C′τ + Cτ ′)B + CτβD](Δs)4 + ε5 . (4.29)
Then, scalar multiplication by D gives
δ =14!Cτβ(Δs)4 + ε5 ·D , (4.30)
so that from (4.30) we have
β =4!Cτ
limΔs→0
δ
(Δs)4. (4.31)
Thus, in a neighbourhood of the point E ∈ �+, the sign of δ is invariant(positive or negative, according to the sign of τβ); that is, the curve is all

4.3 Curvature and Torsions 153
placed from one side, with respect to the osculating hyperplane Π(E), andmore precisely, it stands where ±D is placed, if τβ > 0 or τβ < 0, respectively.
The principal tetrad, as well as the Frenet–Serret formulas (4.19), are nolonger valid when the curve �+ is lightlike because the concept of curvilinearabscissa is lost in this case. Thus, as for the case of the photon dynamics,one must use a generic parameter, and the tangent vector to the null curve isdefined up to a multiplicative factor. The intrinsic characterization of a nullcurve, that is the analogous quantities of C, τ , β, can be obtained using aquasi-orthogonal basis, eα. The latter (in general anholonomic) are built upby considering, for the generic point E ∈ �+, a pair of orthogonal 2-planes: Πand Π′; the first, for instance, hyperbolic (and containing the tangent vectorof the null curve �+) and the second elliptic. Among the infinite adapted basisto the 2-planes, i.e. characterized by
e0,2 ∈ Π , e1,3 ∈ Π′ , (4.32)
recalling that Π (hyperbolic) contains two null straight lines, it is meaningfulto consider those having:
1. e0,2 are null vectors, satisfying the normalization condition e0 · e2 = 1;2. e1,3 are spacelike orthonormal vectors.
It results in
eα · eβ =
⎛⎜⎝
0 0 1 00 1 0 01 0 0 00 0 0 1
⎞⎟⎠ = δα{2−β} , (4.33)
where the symbol {2− β} denotes 2 − β modulus 4. The bases like {eα} arenot orthonormal: in fact, they contain two null vectors (e0 and e2) and aretermed quasi-orthonormal (see e.g. [3]). In the structure (Π,Π′), the vectorse0,2 are defined each up to a multiplicative factor, while e1,3 can be arbitrarilyrotated in the 2-plane Π′; a set of equivalent tetrads {eα} arises, to which onemust add the possibility to select the pair of hyperplanes Π and Π′. By usingthe Cartan method of the repere mobile [4, 5], one recognizes that
1. along any null curve parametrized by an arbitrary parameter t, i.e. withequations xα(t), one has two local invariants1: I(t) and J(t), built upwith the derivatives of xα(t) (up to the third and fourth order, respec-tively), and the Kronecker tensor; they are independent on the choice ofthe coordinates and, as concerns the dependence on the parameter t, thedifferential forms: Idt and Jdt are invariant too.Thus, one can introduce, on the curve, an absolute parameter σ (dσ = Idt),analogous to the curvilinear abscissa;
1 For a nonnull curve, these invariants are four: one corresponding to the curvilinearabscissa and the three others related to the curvatures: C, τ and β.

154 4 Applications
2. in each point of the curve, there exists a special quasi-orthogonal tetrad:{eα} def= (T,N,B,D), such that, by adopting the parameter σ, it satisfiesthe conditions analogous to the Frenet–Serret formulas (4.19):
{d OEdσ = T , dT
dσ = N , dNdσ = τT −B,
dBdσ = βD− τN, dD
dσ = −βT (4.34)
One recognizes immediately that the curvatures are, now, no more three,but only two: τ and β (the first curvature: C, is unitary); however, being Tand B null vectors, in order to determine τ and β, one only needs (4.34)4,which gives the ordinary relation:
(dBdσ
)2
= τ2 + β2 . (4.35)
The latter is an equation for τ because β, in turn, is determined by theinvariant J above mentioned, that is:
|β| =(
dJdσ
)10
. (4.36)
Further details can be found in [5].
4.4 Intrinsic Equations
The Frenet–Serret formulas (4.19) can be conveniently used to discuss absoluteproperties of the motion, especially in the presence of constraints when, forvery special external fields, it is possible to distinguish between the geometricalproperties from the kinematical ones. As an example, let us consider the caseof a massive particle, with proper mass m0 > 0, in the (purely positional)external field:
K = K(E) . (4.37)
The absolute equationdPdτ
= K(E) , (4.38)
taking into account the expression of the momentum: P = m0V, becomes
dm0
dτV +m0A = K(E) , (4.39)
where, because of the relation s = cτ+const., between the curvilinear abscissaand the proper time, we have
V = cT , A = c2C . (4.40)

4.4 Intrinsic Equations 155
Projecting on the principal tetrad, K can be decomposed as
K = KTT +KNN +KBB +KDD , (4.41)
and the intrinsic equations of motion become
dm0
ds=
1c2KT , m0C =
1c2KN , KB = 0 , KD = 0 . (4.42)
Relations (4.42) are not equivalent to the original ones (4.38) because thechosen basis is itself unknown. However, (4.42)3,4 play a role similar to (4.42)2,in the sense that, as the last equations give C, they express the torsions τ andβ in purely geometrical terms. In fact, by differentiating with respect to s andusing (4.19)3,4, one gets
dKds·B− τKN = 0 ,
dKds·D = 0 , (4.43)
so that another differentiation gives
d2Kds2
·D− β dKds·B = 0 , (4.44)
where we have assumed the following:
dKds
= Tα ∂
∂xαK ,
d2Kds2
= TαT β ∂2
∂xα∂xβK + CNα ∂
∂xαK . (4.45)
Therefore, once the force law (4.37) was assigned, (4.42)2, (4.43)1 and (4.44)give the expression of the three curvatures of �+: C, τ , β as functions of m0,T, N, B, D. In this sense, system (4.19), completed with (4.42)1 and theadditional equation dΩE/ds = T, can be solved, allowing the determinationof the world line �+ as well as the proper mass m0, once initial conditionswere fixed.
The problem is simplified if the external field K is constant; then, from(4.43)1, it follows τ = 0, so that �+ is flat, which is also derived directly from(4.38): P = m0V = Kτ + P0.
Finally, as concerns the intrinsic equations of the relative motions with re-spect to a given Galilean frame, we recall that the following fundamental re-lations hold
ddt
(mv) = F , m =m0√
1− v2/c2. (4.46)
From this, at least in the case of particles without internal structure, m0 =const., we have the following equation:
mtv · ac2
v +mna = F , (4.47)

156 4 Applications
where mt and mn are defined by
mt =m0
(1− v2/c2)3/2, mn =
m0
(1− v2/c2)1/2, (4.48)
and represent the longitudinal and transversal mass, respectively. The latterdenomination comes from the intrinsic form of (4.47). In fact, decomposing vand a along t and n, respectively (tangent and principal normal unit vectors),and introducing the curvature radius r(s), (4.47) becomes
mts t +mns2
rn = F , (4.49)
and gives to mt and mn the meaning of inertial mass along the tangent andthe principal normal, respectively. As in the classical case, the force F belongsto the osculating plane, so that, projecting on the principal triad, one getsthe intrinsic equations:
mt s = Ft , mns2
r= Fn , 0 = Fb . (4.50)
Equations (4.50) are especially useful in the case of a fast particle, constrained(in a given Galilean frame) onto a fixed curve or surface; however, similarlyto what happens for the absolute formulation, they are also useful for a freetest particle. In this case, in fact, if the force F does not depend explicitlyon the time: F = F(P,v), (4.50), combined with the Frenet–Serret formulas,reduce the kinematical problem to a pure geometric one (the determination ofthe motion law, being sub-ordered to the resolution of a first-order differentialequation for s).
4.5 Conservative Lorentz-like Forces
Let us consider now, in the special relativistic ambit, a class of Lorentz-likeforces, i.e.
Kα = FαβVβ (α = 0, 1, 2, 3) , (4.51)
being Fαβ an antisymmetric tensor of rank 2: Fαβ = −Fβα. These 4-forcesare of mechanical type: K ·V = KαV
α = 0, and exclude any possible thermalaction: q0 = 0; therefore, they imply the conservation of the proper mass ofthe particle, m0.
Let us also assume that the tensor Fαβ admits a potential, i.e. there existsa regular vectorial field φ(E), such that
Fαβ = ∂αφβ − ∂βφα . (4.52)
If φ is not lightlike (a case excluded here), we can decompose it in its modulusand direction: φα = φγα, that is

4.5 Conservative Lorentz-like Forces 157
φ = φ(E)γ(E) , ||γ|| = ±1 ; (4.53)
it followsFαβ = φ(∂αγβ − ∂βγα) + ∂αφγβ − ∂βφγα , (4.54)
and we have
Kα = φ(∂αγβ − ∂βγα)V β + ∂αφ(γ ·V)− dφdτγα
(ddτ
= V α∂α
). (4.55)
In particular, let γ be uniform and timelike:
γ = const., ||γ|| = −1 , (4.56)
so that it represents a Galilean frame Sg. In this case, (4.55) simplifies to thefollowing (intrinsic) form:
K = (γ ·V)Gradφ , Gradφ ≡ ∂αφ−dφdτγ . (4.57)
We notice that the force field K now depends on E (through φ) and V (andalso from γ); it is intrinsically conservative if and only if φ = constant, andin such a case, one has trivially K = 0.
Let us examine, now, the mechanical force F, relative to the reference frameassociated with γ (Sg), introducing in M4—without any loss of generality—Cartesian coordinates with γ = c0, and the other three spatial axis belongingto the 3-space Σ, orthogonal to γ (i.e. coordinates adapted to Sg). We havethen γ0 = 1, γi = 0, γ0 = −1, γi = 0 and, from (4.57),
K = V0 Gradφ− dφdτγ , V0 = −cη . (4.58)
Thus, in Sg, the relative force, F = KΣ/η associated with K, is given by
F = −c gradφ , gradφ ≡ ∂iφ ; (4.59)
it comes from a potential φ(E), depending on the space-time coordinates andhence, on the time coordinate of Sg too; therefore, F is not conservative ingeneral, neither in the preferred frame Sg. It becomes conservative in Sg ifand only if φ(E) does not depend on t; in this case, which will be consideredin detail below, we have
F = gradU , U = −c φ(x1, x2, x3) −→ W = F · v = U . (4.60)
It is evident that the conservativity of the force F (and also the more generalcondition (4.59)) is strictly related to Sg, at least for the following two reasons:
1. passing from Sg to another frame S′g the (Lorentz) transformation formu-
las of the coordinates involve the time too;

158 4 Applications
2. in the dynamical problem relative to S′g, the physical action (4.60), even
if it remains of mechanical type, is represented by a more general forceF′, as given by (3.60):
F′ =1σ
[αF− 1
c2F ·(v − u
1 + α
)u], (4.61)
also depending on the velocity.
4.6 Central Forces in a Galilean Frame
In the context of the forces like (4.60), even if confined to a well-determinedGalilean frame Sg, the central ones are characterized by the condition of beingdirected towards a fixed point O ∈ Sg, and with intensity only depending onthe distance of the point P from O: ρ = |OP|. In this case, one has φ = φ(ρ),so that
Fi = ∂iU =∂U
∂ρ
xi − xiO
ρ,
or, in terms of intrinsic quantities of the Galilean frame Sg:
F =∂U(ρ)∂ρ
OPρ
, ρ =√δik(xi − xi
O)(xk − xkO) . (4.62)
Such a force will be attractive (repulsive) if ∂U/∂ρ is negative (positive).Moreover, the equation of motion,
ddt
(mv) = F , (4.63)
implies the existence of the energy integral: E − U = H = const., that is:
mc2 − U(ρ) = H, m =m0√
1− v2/c2(m0, H = const.) ; (4.64)
it follows that, once the total energy H is fixed, the accessible region for themotion is determined by H + U(ρ) > 0.
In a relativistic context too, the typical property of central motions survives,that is the trajectory is planar and the area integral exists. In fact, by takingthe vector product by OP of (4.63), and using (4.62), one finds
OP× ddt
(mv) =ddt
(OP×mv) = 0 ,
so that a first integral of the angular momentum follows:
OP×mv = m0k , (4.65)
with k a constant vector:

4.6 Central Forces in a Galilean Frame 159
m0k = OP0 × (mv)0 . (4.66)
If k = 0 (that is OP0 parallel to v0 or, in particular, P0 ≡ O or v0 = 0), themotion is necessarily a straight line passing through O, and the law of motionis given by (4.63), projected on the radius OP. In fact, assuming
F = F (ρ)u , F (ρ) =dUdρ
, u = vers OP ,
and making explicit the dependence of m from the velocity, given by (4.64)2,from (4.63) one gets the following scalar equation:
m0ρ
(1 − ρ2/c2)3/2=
dUdρ
; (4.67)
this equation can be, obviously, also obtained by using the energy integral(4.64)1.
If k �= 0 (general case), from (4.65) it follows that the vector OP is alwaysorthogonal to k, and thus the motion is planar (determined by the initialvalues P0 and v0), passing through the centre of the force O. Introducing inthis plane a system of polar coordinates (ρ, θ), with origin in O, and assumingc3 aligned with k, one gets the area first integral:
mρ2θ = m0k , k = kc3 ; (4.68)
in particular, it follows that θ, as a function of the time, increases monotoni-cally, so that the particle will be never at rest. By eliminating m, using (4.64)1and (4.68), one gets
θ =kE0
ρ2[H + U(ρ)], (4.69)
where E0 = m0c2 is the proper energy. Thus, once the trajectory ρ = ρ(θ) is
known, the law of motion θ = θ(t) follows by quadratures.In this way, independently on the specification of the potential U(ρ), the
dynamical problem is reduced to the determination of the (planar) trajectoryonly. It is then convenient to use the first integrals (4.64)1 and (4.69), in placeof the motion (4.63). From the expression of the velocity in polar coordinates,
v2 = ρ2θ2 + ρ2 = (ρ2 + ρ′2)θ2 , ρ′ =dρdθ
,
and using the condition (4.69), the square of the velocity follows:
v2 = (ρ2 + ρ′2)k2E2
0
ρ4[H + U(ρ)]2; (4.70)
thus, (4.64)1 becomes
E0H + U(ρ)
=
√1− k2
c2E20
ρ2 + ρ′2
ρ4[H + U(ρ)]2,

160 4 Applications
or
E0 =
√√√√[H + U(ρ)]2 − k2
c2E20
[(1ρ
)2
+(
1ρ
)′2]. (4.71)
One finds, then, the resolvent equation of the trajectory; in fact, introducingthe new variable, ξ = 1/ρ, and squaring both sides of (4.71), one finds
ξ′2 + ξ2 − c2
k2E20
[H + U(ξ)]2 +c2
k2= 0 . (4.72)
From here, by differentiating with respect to θ, one gets the second-orderdifferential equation of the dynamical trajectories:
ξ′′ + ξ − c2
k2E20
[H + U(ξ)]U ′(ξ) = 0 , (4.73)
which contains the circular trajectories ξ = const.
4.7 The Keplerian Case
Let us assume now that the potential U be of Newtonian type, i.e. with thefield proportional to the proper mass of the particle,
U = fm0M0
ρ= fm0M0ξ , (4.74)
where f denotes the Newtonian gravitational constant. Thus m0, togetherwith its inertial meaning has also a gravitational significance: the hypothesis,less natural, of proportionality to the relative mass gives a different dynamicalproblem. Equation (4.74) describes, in a relativistic framework, a central grav-itational field of Newtonian type (that is instantaneous), due to an isolatedcentral body (the Sun, for example). In the hypothesis (4.74), the equation ofthe trajectories (4.73) becomes the classic one:
ξ′′ + ω2ξ =ω2
p, (4.75)
where
ω2 def= 1−(fM0
k c
)2
,1p
def=fHM0
k2E0 ω2, (4.76)
with the condition
1−(fM0
kc
)2
> 0 . (4.77)

4.7 The Keplerian Case 161
The solution of (4.75) can be written in the form:
ξ = A cos (ωθ + α) +1p, (4.78)
where, because of the arbitrariness of α, the constant A can be assumedpositive; moreover, the constant H of the total energy, given in (4.64)1, canalso be assumed positive because of the presence of the term mc2, in generalbigger than U :
H =E0√
1− v20/c
2− U(ρ0) > 0 . (4.79)
By introducing the notation A def= e/p, it follows from (4.78) that
ρ =p
1 + e cos (ωθ + α), (4.80)
where e ≥ 0 and α ∈ [0, 2π) are constant, which are determined from theinitial conditions. Finally, assuming θ having its zero value along the linejoining O with the perihelium, it is α = 0, and (4.80) reduces to
ρ =p
1 + e cos ωθ. (4.81)
This equation does not represent a conic because ω �= 1, and the orbit canbe limited or not, according to the value of e: limited for e < 1, unlimited fore ≥ 1. This circumstance is strictly related to the value of the total energy H ,which we will write in the form:
H = E + E0 , (4.82)
in analogy with the classical two bodies problem. Thus, (4.73) becomes
(ξ′)2 + ω2ξ2 − 2ω2
pξ =
c2
k2
(H2
E20
− 1)
=E
m0k2
(2 +
E
E0
),
and, by using (4.81), one gets
ω2
p2(e2 − 1) =
E
m0k2
(2 +
E
E0
). (4.83)
Moreover, using (4.82), (4.76)2 becomes
1p
=fM0
k2ω2
(1 +
E
E0
), (4.84)
so that (4.83) is equivalent to
fm0M0
p(e2 − 1) = E
(1 +
11 + E/E0
), (4.85)

162 4 Applications
or, introducing H and using (4.84) and (4.76)1:
1− ω2
ω2(e2 − 1) = 1− E
20
E2. (4.86)
Therefore, one has a criterion to discriminate among the orbits, by means ofthe “eccentricity” e, and the energy constant H > 0, taking into account that1− ω2 > 0: ⎧⎨
⎩e < 1 when H < E0 (−E0 < E < 0)e = 1 when H = E0 (E = 0)e > 1 when H > E0 (E > 0) .
(4.87)
Summarizing, if e < 1, (4.81) represents a curve bounded between the twocircles, with centre O and radii r = 1/(1 + e) and R = 1/(1− e), respectively(in particular, if e = 0, i.e. H = ωE0, one has exactly a circle). Moreover, whenthe orbit intersects one of these circles, at the intersection point, one has ξ′ = 0(maximum or minimum distance from the centre O), that is, using (4.69):
ρ ≡ ρ′θ = − kE0ξ′H + U(ξ)
= 0 ;
as a consequence, the velocity is transversal, and the trajectory is tangent tothe same circle.
Moreover, the advance of the perihelium, after two successive loops, is not2π (as it would be for an elliptic orbit), but 2π/ω > 2π (being ω < 1), and thetrajectory has the typical form of a rosette (see Fig. 4.1). If ω is rational, thenthe orbit is closed; in the opposite case, the trajectory is dense in the coronabounded by the two circles. This is a result of Minkowskian gravity, which findsits complete confirmation in general relativity in the relative formulation ofthe so-called exterior Schwarzschild problem, where we have the precessionof the perihelium, for every freely gravitation particle. There, however, thetrajectory equation is different because of the presence of a term like ξ3 (see[6], p. 260). In the limit c → ∞, one finds the classical case (see [2], p. 304,with M = M0 and m∗ = m = m0).
R
Δθ r
Fig. 4.1. Rosetta-like motion

4.8 Motion of Charged Particles in a Uniform Magnetic Field 163
4.8 Motion of Charged Particlesin a Uniform Magnetic Field
Let us now consider another fundamental problem, that is the motion of acharged particle in a given electromagnetic field, as for example that of anaccelerated particle in a synchrotron. The motion is considered with respectto a given Galilean frame and, hence, it is described by the fundamentalrelativistic equations:
ddt
(mv) = F ,ddt
(mc2) = F · v + q , (4.88)
where m = m0/√
1− v2/c2. The physical action F is due to the electromag-netic field and, as it is well known, it is purely mechanical: q = 0. Thus,the charged test particles we are considering have no any internal structure:m0 = const. and, if e denotes the charge of the particle, the mechanical forceis the Lorentz one:
F = e
(E +
1cv ×H
). (4.89)
We will study the dynamical problem in the following hypothesis:
1. absence of the electric field: E = 0.2 Equation (4.88) then becomes
ddt
(mv) =e
cv ×H ,
ddt
(mc2) = F · v = 0 ; (4.90)
whatever magnetic field were assigned in the “restricted ” problem: H =H(P,v, t), the energy integral holds mc2 = const., that is the speed isconstant:
v = const. = v0 < c . (4.91)
Thus, because of hypothesis 1, the particle’s motion is uniform. The tra-jectory, instead, has no a priori limitations, but it is sub-ordered to theequation:
ma =e
cv ×H , (4.92)
with m constant:m =
m0√1− v2
0/c2. (4.93)
From (4.92), by differentiation, follows, then, the relation
ma =e
c(a ×H + v × H) , (4.94)
and we assume another hypothesis:
2 The case E �= 0 is discussed in [7], p. 520.

164 4 Applications
2. the magnetic field is uniform: H = const. and without any loss of gener-ality, aligned along the z-axis:
H = Hc3 , H > 0 and const. (4.95)
It follows the existence of another first integral, that is the momentum withrespect to the z-axis, being F orthogonal to the z-axis itself: mz = const.,or
z = const. = z0 . (4.96)
Thus, if one assumes z0 = 0, that is v0 ⊥ z, the motion is planar, andit is contained in the plane Π, defined by (P0,v0), and orthogonal to thez-axis. According to the above hypothesis, one has then
3. v0 is orthogonal to H, and the trajectory is a circle. This can be see byprojecting (4.92) onto the x–y plane: Π or, directly, from (4.94). In fact,from the hypothesis 2, it assumes the following form:
ma =e
c(a×H) ,
so that the vectors a and a are orthogonal to each other, and to H, andthe condition a =const. follows too.
Finally, in the hypothesis 1–3, the motion is uniform: s = const. (s = 0),planar, and the magnitude of the acceleration is also constant:
a2 ≡ (s)2 +(v2
ρ
)2
=(v2
ρ
)2
= const. ;
thus, 1/ρ is const. and the orbit is a circle. We can determine the centre C andthe radius R of the circle, starting from the initial conditions. The centre C isplaced in Π, along the line orthogonal to v0 and passing for P0. To determineit, let us assume polar coordinates, with origin in C, and the usual notation ρand θ and conventions for the unit vectors u and τ . It results ρ = R, v = Rθτand a = −Rθ2u; furthermore, Rθ = const. = ±v, and, from (4.92):
−mRθ2 =e
cRθH < 0 .
Thus, one finds that the sign of θ is opposite to that of the charge e:
mRθ = −ecRH , v = R|θ| , (4.97)
and finally,R =
cmv
|e|H , (4.98)
orR =
m0
|e|cv
H√
1− v2/c2. (4.99)

4.9 Extension of Maxwell’s Equations to any Galilean Frame 165
Thus, if v,H andR (radius of the particle accelerator) are known, (4.99) allowsto obtain the ratio between the charge and the proper mass of a particle:
|e|m0
=c
RH
v√1− v2/c2
. (4.100)
The analogous result, obtained using classical mechanics, in place of (4.99),corresponds to a lesser value:
Rc =cm0v
|e|H < R ,
and, obviously, the difference R − Rc becomes bigger and bigger, as soonas that v approaches the speed of light. Equation (4.99) is in agreement withexperiments, so that the use of the relativistic formula is essential in projectingan accelerating machine.
As a final remark, we notice that, because of the presence of c, in (4.99), themagnetic field H should be intense enough, in order that R has a reasonablevalue for the experimental device (and not of the order of km).
4.9 Extension of Maxwell’s Equationsto any Galilean Frame
As already stated in Sect. 1.4, Maxwell’s theory can be formally extended,in a classic context, from the heter S∗ to an arbitrary Galilean frame S′, inmotion with respect to S∗. Let T0 and TΩ be two orthonormal triads, in S∗
and S′, respectively, with unit vectors ci and c′i(t), and let vΩ and ω be thekinematical characteristics of the motion of S′ with respect to S∗.
Let us start from the formulation of the classical electromagnetism in vacuo,in the heter frame S∗ that is the set of Maxwell’s equations (1.15):
⎧⎪⎨⎪⎩
div H = 0 , curl E +1c∂tH = 0 ,
div E = 4πρ , curl H− 1c∂tE =
4πc
J .(4.101)
Passing from S∗ to S′, one has to transform these equations using, for thegeneric point P, in place of the Cartesian coordinates xi relative to T0 ∈ S∗,the analogous coordinates xi′ relative to TΩ ∈ S′. To this end, it is necessary touse the transformation formulas xi = xi(t, x′), obtained from the fundamentalrelation OP = OΩ(t) + xi′c′i(t), with OP = xici, that is:
xi = OΩ(t) · ci + xk′c′k(t) · ci , (4.102)

166 4 Applications
or the inverse relations:
xi′ = xkck · ci′(t)−OΩ(t) · ci′ . (4.103)
We will denote by E′, H′ the electric and magnetic fields E and H (bothinvariant) once expressed in terms of the time t and the variables xk′
, by using(4.102). The spatial operators div and curl have an invariantive property withrespect to the transformations (4.102):
⎧⎪⎪⎨⎪⎪⎩
ci × ∂
∂xi= ci′ × ∂
∂xi′ = inv .
ci · ∂
∂xi= ci′ · ∂
∂xi′ = inv .;(4.104)
the temporal derivative, instead, has not an invariantive meaning:
∂
∂t→ ∂
∂t+∂xi′
∂t
∂
∂xi′ . (4.105)
Moreover, according to (4.103) and using the Poisson formulas for the rigidkinematics, one has
∂xi′
∂t= −W · ci′ (i = 1, 2, 3) , (4.106)
whereW def= vΩ(t) + ω(t)× ΩP = W(t, P ) ; (4.107)
in addition, for an arbitrary vector field v(t, x), the following general decom-position holds
∂v∂xi
=12curlv × ci + σ(v)
i , (4.108)
having assumed
σ(v)i
def=12
(∂v∂xi
+ gradvi
). (4.109)
Thus, by using (4.105), one gets the following transformation formula:
∂v(t, x)∂t
=∂v′(t, x′)
∂t− 1
2curl v′ ×W− σ(v′)
W , (4.110)
where, following (4.109):
σ(v′)W
def= W iσ(v′)i =
12
(∂Wv′ + gradv′ ·W
). (4.111)
At this point, the transformation of (4.101) follows immediately, if one takesinto account that E, H and ρ have an absolute meaning, while the currentdensity J = ρv, because of the theorem of addition of velocities, becomes

References 167
J = J′ + ρW . (4.112)
Therefore, Maxwell’s equations in the Galilean frame S′ assume the form:⎧⎪⎨⎪⎩
div H = 0 , curl E +1c∂tH = ΔH ,
div E = 4πρ , curl H− 1c∂tE =
4πc
(J′ + ρW)−ΔE ,
(4.113)
where, following (4.111), we have introduced the notation:
Δv =1c
(12curl v ×W + σ(v)
W
), (4.114)
for every vector field v, and the vector W has the kinematical meaning definedin (4.107). Equation (4.113) extends the formulation of classical electromag-netism to an arbitrary frame S′, and it shows clearly the noninvariantivecontent of Maxwell’s equations when changing the heter frame S∗: in fact,new terms appear at the right-hand side of (4.101)2,4, and these terms identi-cally vanish, whatever the electromagnetic field be, if and only if W = 0, i.e.vΩ = 0 and ω = 0, so that S′ ≡ S∗.
If S′ �= S∗, such terms are always present: apparent electromagnetic currentdensities, analogous to the inertial forces (dragging and Coriolis) of classicalmechanics. Clearly, they are really present and can be measured in S′, butthey disappear in the heter frame S∗. The situation, in M4, will be completelydifferent (as we will see in Chap. 9) since (4.101) will result instead formallyinvariant.
It is also clear that, even in the formulation (4.113) of Maxwell’s equations,the heter frame still plays a special role; in fact, W(t, P ) is directly connectedto the motion of S′ with respect to S∗. In particular, if S′ is in rectilinearuniform motion with respect to S∗, it results W = u = const.
References
1. J.L. Synge, Relativity, the general theory, Ed. North Holland, Amsterdam (1958).150
2. G. Ferrarese, Lezioni di meccanica razionale, Vol. I, Ed. Pitagora, Bologna (1980).151, 162
3. Y.C. Wong, Quasiorthogonal ennuples of congruences in a Riemannian space,Ann. Math., 2nd Ser., 46, 158–173 (1945). 153
4. E. Cartan, Le theorie des groupes finis et continus et la geometrie differentielletraitees par la methode du repere mobile, Gauthiers-Villars, Paris (1937). 153
5. M. Castagnino, Sulle formule di Frenet-Serret per le curve nulle di una V4 rie-manniana a metrica iperbolica normale, Rend. Mat. Roma, 24, 438–461 (1964).153, 154
6. G. Ferrarese, Lezioni di relativita generale, II edn, Ed. Pitagora, Bologna (2001).162
7. A. Pignedoli, Alcune teorie meccaniche superiori, CEDAM, Padova (1969). 163

5
Relativistic Kinematicsfor a Three-Dimensional Continuum
5.1 Continuum Mechanics. RelativeRepresentation of the Motion
We study here the relativistic mechanics of a continuum,1 adopting a differentpoint of view from that for a material point. In the latter case the absoluteformulation of kinematics and dynamics was considered before the relativeone. In the present case, instead, it is convenient to begin with the classicalpoint of view in terms of an arbitrary Galilean frame Sg and then pass to therelativistic extension in M4, that is, to the absolute formulation.
Because of the relative aspect of our treatment, we assume that the un-derlying reference space is the ordinary Euclidean manifold E3 (to which aGalilean frame Sg is superposed) endowed with the natural topology. Themathematical scheme of the continuum, including both geometrical and kine-matical aspects, is obtained by considering connected and bounded subsets Cof E3 (generally variable with the time). Their evolution, in Sg, is describedby the vectorial function
OP = OP(t, y1, y2, y3) , P ∈ C , (5.1)
where yi (i = 1, 2, 3) are three curvilinear coordinates which label the genericparticle of the continuum at each instant t ∈ (t0, t1). They are often called“label coordinates,” or “Lagrangian coordinates,” because they label the par-ticle itself.
Once a Cartesian triad T in Sg is fixed (see Fig. 5.1), the Lagrangian coor-dinates can be interpreted as (curvilinear) coordinates of a point P∗ represen-tative of the particle. Varying the particle, i.e. the parameters yi, P∗ describesa three-dimensional configuration field C∗ or the reference configuration of the
1 The continuum scheme will not be justified a priori from a statistical point of view,by using probabilistic considerations or limiting processes on the point particlescheme.
G. Ferrarese and D. Bini: Relativistic Kinematics for a Three-Dimensional Continuum, Lect.
Notes Phys. 727, 169–206 (2008)
DOI 10.1007/978-3-540-73168-9 5 c© Springer-Verlag Berlin Heidelberg 2008

170 5 Relativistic Kinematics for a Three-Dimensional Continuum
τ
OC
C
P'
P'P
P
Fig. 5.1. Evolution of a generic continuum in a Galilean frame Sg
system. The configuration field C of the positions of the ∞3 particles of thesystem at the generic instant t is called instead the actual (or instantaneous)configuration of the system.
Clearly the Lagrangian coordinates yi are not uniquely defined, but onlyup to an invertible transformation
yi = yi(y′) , (5.2)
which does not involve time. We will assume that
Adef= det
∣∣∣∣∣∣∣∣ ∂y
i
∂y′k
∣∣∣∣∣∣∣∣ > 0 , (5.3)
which is more restrictive than A �= 0 and ensures the local invertibility of (5.2).Such a limitation introduces a well-determined orientation in the continuum.For all t ∈ (t0, t1), (5.1) are the (vectorial) parametric equations of the actualconfiguration C: thus, (5.3) corresponds, in the three-dimensional case, to thecondition dλ/dλ′ > 0, which characterizes the admissible parameters of anoriented curve for the case of a single material point.
The vectorial function (5.1) and the corresponding scalar equations
xi = xi(t, y1, y2, y3) , (i = 1, 2, 3) (5.4)
are assumed to be sufficiently regular (even C∞), with respect to all fourvariables and, in particular, invertible for each t ∈ (t0, t1):
yi = yi(t, x1, x2, x3) ; (5.5)
this implies that, at each instant, one has a bijective map between the pointsof the reference configuration and those of the actual one. In other words, twodifferent particles M and M ′ of the continuum (corresponding to differentvalues of yi) remain distinct throughout the motion. This does not mean thatthe spatial trajectories of two particles cannot intersect each other, but only

5.1 Continuum Mechanics. Relative Representation of the Motion 171
that two particles cannot occupy the same position at the same instant; thatis, they must have nonintersecting world lines.
As a consequence, during the evolution, there cannot be collisions or breaksand every loop or closed surface of C∗ remains closed at every instant t. Thisfollows from the fundamental requirement that each element of the continuumhas its own individuality and cannot be destroyed. Hence, we will not considerany process of matter annihilation or generation.
Equation (5.4) define the position at any instant t of each particle (i.e. forfixed values of yi). For fixed t, they instead describe the actual configurationof the system parametrically, in terms of yi. Thus, (5.4) give the motion ofthe whole system, particle by particle, varying the four parameters yi and t.This is the so-called Lagrangian point of view, which discusses the dynamicalcharacteristics of the system as a function of the particle and time, and henceit assumes yi ∈ C∗ and t ∈ (t0, t1) to be independent variables.
Conversely, the functions (5.5), which are equivalent to (5.4) but assumexi ∈ C and t ∈ (t0, t1), correspond to the Eulerian point of view, a differentdescription of motion according to which the kinematical ingredients are thepoint P and the time t. In fact, (5.5) give, at each instant t, the label of theparticle which, at that moment, occupies the point P in C.
We notice that, in the Eulerian description, the variables xi are defined ina domain (C) which is not fixed in the considered Galilean frame, but varieswith t. However, for the points of C, either the Cartesian coordinates xi orthe curvilinear coordinates yi are admissible. Thus to preserve the orientationof the continuum, from (5.3), the following limitation holds:
D def= det∣∣∣∣∣∣∣∣ ∂x
i
∂yk
∣∣∣∣∣∣∣∣ > 0 . (5.6)
We will denote by ei the derivatives of the vectorial function (5.1) with respectto the parameters yi:
eidef=
∂OP(t, y)∂yi
, (i = 1, 2, 3) . (5.7)
These are three linearly independent vectors because, for each P and t, therelation
αiei = 0 , ei =∂xk
∂yick (5.8)
implies αi = 0. In fact, (5.8) is equivalent to
αi ∂OP∂yi
= αi ∂xk
∂yick = 0 ,
i.e. it corresponds to the linear and homogeneous system
αi ∂xk
∂yi= 0 , (k = 1, 2, 3) ,

172 5 Relativistic Kinematics for a Three-Dimensional Continuum
whose solution is necessarily αi = 0 because of the limitation (5.6).The vectors ei, defined at each point P ∈ C by (5.7), form the so-called
natural basis, depending on both the considered instant and the particle: ei =ei(t, y). This basis, exactly like the Cartesian one ck, can be used to decomposea vector applied at P ∈ C (P being the position of the particle P∗, at theinstant t).
The Cartesian representation (in terms of ck) as well as the natural repre-sentation (in terms of ek) are equivalent, and one can consider the transfor-mation laws for the change of basis. From (5.7) one has
ei =∂xk
∂yick (5.9)
and the inverse relations
ck =∂yi
∂xkei . (5.10)
The scalar product in the region C represented, in Cartesian terms, by theKronecker tensor, δik = ci · ck, defines the Lagrangian metric:
gikdef= ei · ek , (i, k = 1, 2, 3) . (5.11)
In fact, from (5.9) one has the tensorial relation
gik =∂xl
∂yi
∂xm
∂ykδlm , (5.12)
implyingg
def= det||gik|| = D2 > 0 . (5.13)
5.2 Fundamental Kinematical Fields
Differently from the vectors ei and the Lagrangian metric gik, which have a ge-ometrical meaning only in the actual configurationC, the temporal derivatives
v =∂OP∂t
, a =∂v∂t
=∂2OP∂t2
, (5.14)
have a kinematical meaning, i.e. they represent the velocity and the accelera-tion of the generic particle of the continuum with respect to Sg, in terms ofintrinsic quantities. From (5.1) it follows that (5.14) define v and a as func-tions of yi and t, that is, in Lagrangian form. The corresponding Eulerianform is obtained by substituting the yi by using (5.5), once the differentia-tions are performed.2 Decomposing v and a with respect to the basis ei and2 For a generic function f of the coordinates and time we will often use the notation
f(t, y) in place of f(t, y1, y2, y3) or f(t, x) in place of f(t, x1, x2, x3).

5.2 Fundamental Kinematical Fields 173
ck, one obtains the natural and Cartesian components, respectively. We havethe following relations:
v = viei ≡ xkck ,
(xk = ∂tx
k(t, y) , ∂tdef=
∂
∂t
),
and, using (5.10) in the last term, one gets
viei = xk ∂yi
∂xkei ,
from which, because of the independence of the vectors ei, we have
vi =∂yi
∂xkxk . (5.15)
Clearly, as vi are functions of yk and t, the derivatives ∂yi/∂xk, as well as xk,should be thought of as depending on these variables, too; that is, one mustsubstitute the xi by using (5.4), once the derivatives have been performed.
Similarly, denoting by xk the Cartesian components of the acceleration, onehas the relations
xk = ∂txk(t, y) , xk = ∂ttx
k(t, y) , (5.16)
so that
a = aiei , ai =∂yi
∂xkxk . (5.17)
Commonly, the Cartesian components of the velocity xk, expressed in termsof xi and t by means of (5.5), are called Eulerian velocities and are denotedby ek:
ek def=[∂tx
k]yi=yi(t,x)
. (5.18)
Similarly, the Cartesian components of the acceleration, according to (5.16),are the partial derivatives, with respect to time, of the Cartesian componentsof the velocity: xk = ∂tx
k. To see the relation between the components ofthese quantities with respect to the natural basis we proceed as follows. Onthe one hand, one has a = aiei and on the other, by definition, a = ∂tv; thus
aiei = ∂t(viei) = ∂tviei + vi∂tei = ∂tv
iei + vihikek = (∂tv
i + vkhki)ei ,
where we have used the notation
∂teidef= hi
kek ; (5.19)
hence we haveai = ∂tv
i + hkivk , (i = 1, 2, 3) . (5.20)
The quantities hik appearing in (5.20) arise from the decomposition of thevectors ∂tek, according to the natural basis ei. Since the vectors ei = ei(t, y)

174 5 Relativistic Kinematics for a Three-Dimensional Continuum
depend on time, it follows that the tensor hik is, in general, nonvanishing, andthe relations (5.20) do not coincide with the analogous Cartesian relations:ai �= ∂tv
i. Before specifying better the meaning of hik, it is convenient tobriefly summarize some results already obtained for the metric tensor mαβ ofM4, in terms of gik.
First of all, the basis ei is not orthonormal, so that the scalar productsgik = ei · ek are different from the Kronecker tensor δik. However, the matrixgik is regular because of (5.13), and it can be inverted; denoting the inverseby gik, we have
gihghk = δik . (5.21)
It is therefore, meaningful to consider the dual basis ei of the basis ei, obtainedraising the index with the metric gik:
ei = gikek ∼ ei = gikek . (5.22)
The following fundamental duality relation, obtained using (5.21), holds:
ei · ek = δik ; (5.23)
similar to (5.11), the contravariant metric is given by
gik = ei · ek . (5.24)
As for mαβ or mαβ , in Sg, the metric gik or gik can be used to raise andlower the indices of tensor components, giving rise to different but equivalentrepresentations: covariant (with lowered indices) or contravariant (with raisedindices) and also mixed. In particular, the scalar product of two vectors v andw, in Sg, can be expressed as
v ·w = gikviwk = vkw
k = vkwk = gikviwk . (5.25)
Let us now consider the fundamental relation (5.19), associated with thedecomposition of the vectors ei (where a dot replaces the partial derivative∂t). These vectors, because of the definition (5.7), coincide with the gradientof velocity v with respect to the coordinates yi:
ei = ∂iv(t, y) , (∂i = ∂/∂yi) . (5.26)
It follows immediately that ei · ek = hiheh · ek = hi
hghk, from which we findthe meaning of the covariant components hik = hi
hghk:
hik = ei · ek = ∂iv · ek , (i, k = 1, 2, 3) . (5.27)
The last expression shows that hik is a 2-tensor in the sense that an arbitrarychange in the label coordinates yi = yi(y′) transforms hik according to thetypical law of tensors:
hik =∂y′l
∂yi
∂y′m
∂ykh′lm . (5.28)

5.3 Shear and Vorticity 175
In fact, from (5.7), one has
ei =∂OP∂yi
=∂OP∂y′k
∂y′k
∂yi,
and hence the transformation law of the vectors ei:
ei =∂y′k
∂yie′i ∼ e′k =
∂yi
∂y′kei . (5.29)
Equation (5.27) then gives rise to the relation
hik =∂v∂y′l
∂y′l
∂yi· ∂y
′m
∂yke′m =
∂y′l
∂yi
∂y′m
∂ykh′lm ,
i.e. (5.28). Moreover, (5.29) clarifies the meaning of the limitation (5.3): thetwo natural basis, ei and e′i, associated with the coordinates yi and y′i, re-spectively, have the same orientation (both left-handed or both right-handed)and this is equivalent to selecting, for the continuum, one of the two possibleorientations.
5.3 Shear and Vorticity
The tensor hik or hik = hi
jgjk defined in (5.19):
ei = hikek ≡ ∂iv , (5.30)
summarizes the two fundamental kinematical elements of a continuum: thedeformation velocity or shear and the angular velocity. More precisely, let usdenote the symmetric part of hik by kik and the antisymmetric part by ωik,that is:
hik = kik + ωik , (5.31)
where ⎧⎨⎩kik
def= h(ik) ≡ 12 (hik + hki),
ωikdef= h[ik] ≡ 1
2 (hik − hki).(5.32)
For the tensor kik, by using (5.27), one gets
kik =12(ei · ek + ek · ei) =
12∂t(ei · ek) ,
that is:kik =
12∂tgik . (5.33)
This tensor takes into account the temporal variation of the metric gik(t, y),for each particle, and it is called deformation velocity tensor. The tensor ωik,

176 5 Relativistic Kinematics for a Three-Dimensional Continuum
also termed vorticity tensor, has instead the meaning of angular velocity. Tojustify this meaning, let us consider the vector
ω =12ωikei × ek . (5.34)
Now since kikei × ek = 0 (kik is symmetric, and the product ei × ek isantisymmetric), one has, using (5.31),
ω =12(kik + ωik)ei × ek =
12hikei × ek .
Therefore, from (5.30), the vector ω can also be expressed in the form
ω =12ei × ∂tei . (5.35)
Equation (5.35) is similar to the formula for angular velocity in rigid motion,expressed in terms of an orthonormal triad {ia} (at rest with respect to themoving rigid body) and its derivatives, with respect to time (see [1], p. 125):
ω =12ia × dia
dt.
The fundamental difference between the two relations is that, in the case of acontinuum, the natural basis depends on the coordinates yi (which also leadsto the use of partial derivatives in place of the total derivative with respectto time); in other words, at least as concerns changes in the direction, thecontinuous system behaves as if each particle were a rigid microsystem, withrespect to a generic (not orthonormal) triad.
Furthermore, because of the identity ei = ∂iv, the vector ω(t, y), definedin (5.35), also has a direct meaning in terms of the velocity field:
ω =12ei × ∂iv ≡
12curlv . (5.36)
Using a terminology common in fluid mechanics, ω represents the local vortexof the continuum.
The vector ω is of course invariant, in the sense that it depends only on theconsidered particle and time, but not on the choice of Lagrangian coordinates:
ω =12ωikei × ek = inv =
12ω′
ike′i × e′k . (5.37)
In particular, in terms of the Cartesian components(c)ω ik, one has
ω =12
(c)ω ik ci × ck , (5.38)

5.3 Shear and Vorticity 177
where(c)ω ik=
∂yl
∂xi
∂ym
∂xkωlm . (5.39)
Note that in the last relation it is implicitly assumed that the natural com-ponents ωlm are expressed in terms of the coordinates t and x, by means of(5.5). Moreover, from (5.36), the expression for ω, as function of the Eulerianvelocity e = ekck defined in (5.18), is the following:
ω =12curl e =
12ci × ∂e
∂xi. (5.40)
In contrast to the antisymmetric tensor ωik, which can be represented by thevector ω (the dual of ωik, i.e. ωk = 1/2ηkijωij , see Chap. 2), the deformationvelocity tensor has six (and not three) independent components. It is directlyrelated to the Lagrangian metric gik by (5.33) and, like ω, it can be expressedin terms of the velocity field v:
kik =12(∂iv · ek + ∂kv · ei) . (5.41)
Equation (5.41) is also valid for the Cartesian components(c)
k ik:
(c)
k ik=12
(∂ek
∂xi+∂ei
∂xk
), ei = δike
k , (5.42)
which, in turn, are related to the natural components by the tensorial relation
kik =∂xl
∂yi
∂xm
∂yk
(c)
k lm . (5.43)
Finally, it is worth mentioning that there are no algebraic relations betweenthe two kinematical quantities ωik (angular velocity) and kik (deformationvelocity); however, these quantities are not independent from a differentialpoint of view. More precisely, the gradient of ω is a function of the firstspatial derivatives of the deformation velocity. In fact,
∂iω =∂ω
∂xk
∂xk
∂yi, (5.44)
and by introducing, from (5.40), the components of the Eulerian velocity withrespect to the Cartesian basis e = ehch, we have
∂ω
∂xk=
12ci × ∂2e
∂xi∂xk=
12∂2eh
∂xi∂xkci × ch .
Thus, taking into account the identity
∂2ek
∂xi∂xhci × ch = 0

178 5 Relativistic Kinematics for a Three-Dimensional Continuum
then leads to
∂ω
∂xk=
12
(∂2eh
∂xi∂xk+
∂2ek
∂xi∂xh
)ci × ch =
12∂
∂xi
(∂eh
∂xk+∂ek
∂xh
)ci × ch ,
and using (5.42), we have
∂ω
∂xk=
∂
∂xi
(c)
k hk ci × ch . (5.45)
From this relation it immediately follows that if at a certain instant t the
deformation velocity vanishes everywhere:(c)
k hk= 0, ∀P ∈ C, at that instant,the angular velocity is constant in C3:
(c)
k hk= 0, ∀P ∈ Ct ⇒ ω = const., ∀P ∈ Ct . (5.46)
If the condition is satisfied everywhere at any instant, the angular velocitydepends only on t: ω = ω(t), and the motion is necessarily rigid. This justifiesthe name of deformation velocity for the tensor kik.
We will see, in the next section, how (5.45) is modified passing from theCartesian to the curvilinear coordinates yi.
5.4 Christoffel Symbols and Covariant Derivative
Let us start from the tensor hik, defined in (5.27):
hik = ∂iv · ek , (i, k = 1, 2, 3) , (5.47)
which, with the symmetric and antisymmetric parts, respectively, gives riseto the deformation velocity and the angular velocity:
⎧⎨⎩kik
def= h(ik) = 12 (∂iv · ek + ∂kv · ei),
ωikdef= h[ik] = 1
2 (∂iv · ek − ∂kv · ei).(5.48)
In terms of Cartesian coordinates, v becomes the Eulerian velocity e(t, x) =ekck, so that (5.48) assumes the form
(c)
k ik=12
(∂ek
∂xi+∂ei
∂xk
),
(c)ω ik=
12
(∂ek
∂xi− ∂ei
∂xk
). (5.49)
To see how the relations (5.49) are modified passing from the Cartesian to theLagrangian coordinates yi, we consider the gradient
3 This is the case if the deformation is homogeneous, that is, the components(c)
k hk
do not depend on the position in C.

5.4 Christoffel Symbols and Covariant Derivative 179
∂iv = ∂i(vkek) = ∂ivkek + vk∂iek (5.50)
and, hence, the second derivatives
∂iek =∂2OP∂yi∂yk
. (5.51)
These are linear combinations of eh:
∂iek = Γhikeh = Γik,heh , (5.52)
where the three index coefficients Γhik, or their alternatives Γik,h, obtained
by lowering the index h:Γik,l = ghlΓh
ik , (5.53)
denote the contravariant and covariant components of the gradient ∂iek,respectively:
Γhik = ∂iek · eh , Γik,h = ∂iek · eh . (5.54)
These coefficients can be expressed by means of the metric gik and its firstderivatives as follows:
Γik,h =12(∂igkh + ∂kghi − ∂hgik) , (5.55)
which identifies them as the ordinary first-type Christoffel symbols. In fact,one has
∂ighk = ∂i(ek · eh) = ∂iek · eh + ∂ieh · ek ,
and hence∂ighk = Γik,h + Γih,k , (5.56)
giving the derivatives of gik as functions of the coefficients Γik,h. Conversely,one can invert the relations (5.56), obtaining (5.55). In fact, cyclic permutationof the indices i, h, k, in (5.56), leads to
∂kghi = Γkh,i + Γki,h, ∂hgik = Γhi,k + Γhk,i ;
next, adding the first of these to (5.56) and subtracting the second, (5.55)follows immediately.
The Christoffel symbols, especially the second-type Christoffel symbols
Γhik = ghlΓik,l =
12ghl(∂igkl + ∂kgli − ∂lgik) , (5.57)
play an important role in the Lagrangian differentiation of tensorial functions.Taking into account (5.52), the gradient of v (5.50) assumes the followingform:

180 5 Relativistic Kinematics for a Three-Dimensional Continuum
∂ivdef= (∇iv
k)ek , (5.58)
where∇iv
k def= ∂ivk + Γk
ihvh . (5.59)
In contrast to the case of Cartesian coordinates, ∂iv is no longer representedby the simple partial derivative ∂iv
k, but it is necessary to introduce a dif-ferential operator ∇i which depends on the Christoffel symbols. The latteroperator has an absolute meaning, in the sense that, as follows from (5.58),the 2-index quantity ∇iv
k has tensorial behaviour under a change of the La-grangian coordinates yi:
∇ivk =
∂y′h
∂yi
∂yk
∂y′l∇′
hv′l . (5.60)
It is called covariant derivative of v.If for the vector v one considers the decomposition v = vkek, one needs—in
place of (5.52)—the derivatives of the dual basis ek, which, because of (5.23),can be written as:
∂iek = −Γkiheh . (5.61)
This leads to an analog of (5.58):
∂iv = (∇ivk)ek , (5.62)
where∇ivk
def= ∂ivk − Γhikvh . (5.63)
By comparing (5.58) and (5.62), one gets
(∇ivk)ek = (∇ivh)eh ,
that is, using (5.22), the relations
(∇ivk) = ghk∇ivh ∼ (∇ivh) = ghk∇iv
k . (5.64)
Importantly, the metric behaves like a constant under covariant differentiation:
∇ighk = 0 ∼ ∇ighk = 0 ∼ ∇iδ
kh = 0 , (5.65)
as follows easily from the definitions⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
∇ighk = ∂ig
hk + Γhilg
lk + Γkilg
hl,
∇ighk = ∂ighk − Γlihglk − Γl
ikghl,
∇iδkh = −Γl
ihδkl + Γk
ilδlh,
(5.66)
which are extensions of (5.59) and (5.63) to the case of tensors with severalindices. Thus, we can formulate the following general rule. Passing from Carte-sian (xi) to Lagrangian coordinates (yi), for any tensorial object, the partialderivative must be replaced with the covariant derivative:

5.4 Christoffel Symbols and Covariant Derivative 181
∂i → ∇i . (5.67)
In this way (5.49) become
kik =12(∇ivk +∇kvk) , ωik =
12(∇ivk −∇kvi) . (5.68)
Furthermore, because of the symmetry of the Christoffel symbols, with respectto the lower indices:
Γhik = Γh
ki , Γik,h = Γki,h , (5.69)
Equation (5.68)2 can be cast in the equivalent form:
ωik =12(∂ivk − ∂kvi) . (5.70)
Similarly, the differential tensorial relation (5.45) becomes
∂kω = ∇ikhkei × ek , (5.71)
where∇ikhk = ∂ikhk − Γl
ihklk − Γlikkhl . (5.72)
Note.
• The deformation velocity can also be expressed by using (5.33): kik =1/2∂tgik, which clearly has a tensorial meaning for arbitrary transforma-tions of the coordinates yi that do not involve time. In fact, gik transformsas
gik =∂y′l
∂yi
∂y′m
∂ykg′lm , (5.73)
which implies
kik =∂y′l
∂yi
∂y′m
∂ykk′lm , k′lm =
12∂tg
′lm .
However, the above discussion cannot be repeated when passing from theCartesian coordinates to the Lagrangian ones, which involves time. Inother words, to (5.33) does not correspond the Cartesian analog
(c)
k ik= 1/2∂tδik ≡ 0,
but (5.49) instead. In fact, from (5.33), by using (5.12) in place of (5.73),we have
kik =12∂
∂t
(∂xl
∂yi
∂xm
∂ykδlm
)
=12
[∂
∂yi
(∂xl
∂t
)∂xm
∂ykδlm +
∂xl
∂yi
∂
∂yk
(∂xm
∂t
)δlm
].

182 5 Relativistic Kinematics for a Three-Dimensional Continuum
At this point, to get the Cartesian components, it is enough to identifythe yi with the xi, using (5.5) when necessary; from (5.18) we find
(c)
k ik =12
[∂
∂xi
(∂xl
∂t
)y=y(t,x)
δmk δlm + δl
i
∂
∂xk
(∂xm
∂t
)y=y(t,x)
δlm
]
=12
(∂el
∂xiδkl +
∂em
∂xkδim
),
that is, (5.49)1.• The second-type Christoffel symbols Γi
jk associated with the coordinatesyi through the metric gik and its first derivatives do not transform astensorial quantities; in fact, as it can be easy checked from (5.73), we have
Γhik =
∂y′l
∂yi
∂y′m
∂yk
∂yh
∂y′nΓ′n
lm +∂2y′m
∂yi∂yk
∂yh
∂y′l, (5.74)
where Γ′nlm are the coefficients analogous to Γn
lm:
Γ′nlm =
12g′np
(∂g′mp
∂y′l+∂g′pl
∂y′m− ∂g′lm
∂y′p
). (5.75)
For linear transformations of the Lagrangian coordinates yi, (5.74) reducesto a tensorial law: ∂2y′l/∂yi∂yk ≡ 0 and the coefficients Γj
ik are said tobe an affine tensor. Contrasting to the first-type Christoffel symbols, thecoefficients Γj
ik form a well-determined geometrical entity Γ, in the sensethat the transformation laws (5.74):1. allow one to determine the components Γj
ik of Γ, relative to the coor-dinates yi, once the analogous Γ′j
ik relative to the coordinates y′i areknown, together with the map of the coordinate change.
2. form a group, that is, the following property holds: for three admissiblecoordinate systems yi, y′i and y′′i, the transformation Γ′′ → Γ resultingfrom (5.74) coincides with the product of the two transformations: Γ′′ →Γ′ and Γ′ → Γ and each inverse transformation is a transformation ofthe same type.
Finally, the Cartesian form of the Christoffel symbols follows from (5.57),with yi = xi and gik = δik:
(c)
Γ hik ≡ 0 ; (5.76)
hence, from (5.74), with y′i = xi, one gets
Γhik =
∂2xl
∂yi∂yk
∂yh
∂xl. (5.77)
Equation (5.77) can be checked in two ways, either starting from (5.51) orby using (5.57). In fact, from (5.51) and by using OP = xlcl, we find

5.5 Local Analysis of the Motion of a Continuum 183
∂iek = Γhikeh =
∂2xl
∂yi∂ykcl , (5.78)
which is equivalent to (5.51) because of (5.10); analogously, from (5.57),by using (5.12) and the dual relation
ghl =∂yh
∂xp
∂yl
∂xqδpq ,
one has
Γhik =
12∂yh
∂xp
∂yl
∂xqδpq
[∂2xr
∂yi∂yk
∂xs
∂ylδrs +
∂xr
∂yk
∂2xs
∂yl∂yiδrs
+∂2xr
∂yk∂yl
∂xs
∂ylδrs +
∂2xs
∂yi∂yk
∂xr
∂ylδrs −
∂2xr
∂yl∂yi
∂xs
∂ykδrs
− ∂2xs
∂yk∂yl
∂xr
∂yiδrs
]=∂yh
∂xqδsq
∂2xs
∂yi∂yk,
which coincides with (5.77).
5.5 Local Analysis of the Motion of a Continuum
The meaning of the kinematical quantities introduced in Sect. 5.3 easily fol-lows by analysing the velocity field of the continuum in the instantaneousconfiguration C. In fact, let us consider, first, the vectorial function (5.1) andassume that the time t is fixed. A first-order Taylor expansion gives
OQ = OP +∂OP∂yi
Δyi + O(2), Δyi def= yiQ − yi ,
that is, by using the notation of (5.7):
PQ = eiΔyi + O(2) ; (5.79)
by applying the same procedure to the velocity function (5.14)1, with fixed t,we have
vQ = vP + ∂ivΔyi + O(2) . (5.80)
Let us now use the following decomposition of ∂iv, obtained from (5.30) and(5.31):
∂iv = kikek + ωikek = ki + ωi , (5.81)
whereki
def= kikek (5.82)
andωi
def= ωikek ≡ ω × ei. (5.83)

184 5 Relativistic Kinematics for a Three-Dimensional Continuum
From the definition (5.37), the duality relations (5.23) and by using the anti-symmetry of ωik we then find
ω × ei =12ωhk(eh × ek)× ei =
12ωhk
[(eh · ei)ek − (ek · ei)eh
]
=12ωhk(δh
i ek − δki e
h) =12(ωikek − ωhieh) = ωikek .
Thus (5.81) becomes∂iv = ki + ω × ei , (5.84)
and the approximate formula (5.80), using (5.79), gives the following first-order relation:
vQ = vP + ω × PQ + kiΔyi + O(2) . (5.85)
The relation (5.85), although only a first approximation,4 is invariant withrespect to the choice of the Lagrangian coordinates. This is obvious for all theterms except the last; however, it is easy to show that
kiΔyi = k′iΔy′i = inv. (5.86)
In fact, ki, as follows from (5.82), form a set of vectors labelled by the indexi following a covariant transformation law (exactly as ei). To show this let usstart from the transformation law
kik =∂y′l
∂yi
∂y′m
∂ykk′lm ; (5.87)
contracting both sides by ek, one gets
kikek =∂y′l
∂yi
∂y′m
∂ykk′lmek =
∂y′l
∂yik′lme′m ,
and hence
ki =∂y′l
∂yik′
l , (5.88)
which proves the relation (5.86). Comparing (5.85) with the fundamental for-mula for rigid kinematics
vQ = vP + ω × PQ , (5.89)
one immediately recognizes some substantial differences. Equation (5.89) isexact, while (5.85) is only approximate; in (5.89), ω has a global meaning forthe entire rigid body, because it only depends on time. Conversely, in (5.85),ω has a local meaning, because it also depends on the particle: ω = ω(t, y);
4 The second approximation requires only differentiations and the use of the relation(5.71).

5.5 Local Analysis of the Motion of a Continuum 185
finally, in (5.85), there is an extra term, due to deformations which, like ω,has a local meaning and is absent for the case of the rigid body.
The condition kik = 0 , ∀P ∈ C, not only reduces (5.85) to the form (5.89),but, as we have already seen, it implies the constancy of ω in C. Moreover,the last term in (5.85) can be seen as the gradient of a quadratic form. Moreprecisely, writing, for the sake of brevity, Δyi = yi
Q− yi ≡ ξi and introducingthe (homogeneous) function
K(ξ) =12kikξ
iξk ,
we findkiΔyi = kikekξi ≡ gradξK(ξ) ,
with kik depending only on yi and t, and not on ξi. Thus, (5.85) can also bewritten in the form
vQ = vP + ω × PQ + gradξK(ξ) + O(2) , (5.90)
and has a direct Lagrangian meaning, because the parameters yi and yi +Δyi
denote two distinct particles of the continuum, the positions of which are thepoints P and Q, respectively. Clearly, (5.85) characterizes the instantaneousvelocity distribution of the continuum, in the neighbourhood of the arbitrarypoint P ∈ C. The Eulerian form of (5.85) is instead given by
eQ = eP + ω × PQ+(c)
k i Δxi + O(2) , (5.91)
where now PQ = Δxici and eP(t, x) replaces vP(t, y) after eliminating y withthe aid of (5.5).
Finally, as concerns the term kiΔyi, for any fixed i = 1, 2, 3, the vector ki
can be interpreted as the deformation velocity, at P ∈ C, along the coordinateline yi = var. because it can be obtained from the sum kjΔyj , assuming all theΔy = 0, except for Δyi = 1. The vectors ki can clearly replace completely thetensor kik. For instance, the compatibility conditions for the angular velocity,given in (5.71), can be written as
∂kω = ei × (∂ikk − ∂kki) . (5.92)
Moreover, from (5.61), one has ∂ikk = (∂ikhk − kklΓlih)eh, so that (5.92)
becomes (by using the symmetry properties of the Christoffel symbols)
ei × (∂ikk − ∂kki) = (∂ikkh − Γlihkkl − ∂kkih + Γl
khkil)ei × eh
= (∂ikkh − Γlikkhl) ei × eh = ∇ikkh ei × eh .
Similarly, the temporal derivative of the angular velocity, because of (5.30),becomes
∂tei = −hkiek , (5.93)

186 5 Relativistic Kinematics for a Three-Dimensional Continuum
and, from (5.36), one gets
∂tω =12curla− 1
2hk
iek × hijej .
Hence, since hij = hji − 2ωji and ωijej = ω × ei, we have
12hk
ihijek × ej = −2hkiωjiek × ej = −2kk
iωjiek × ej = 2ki × (ω × ei) ;
thus one obtains the general formula
∂tω =12curla− kω + kω , (5.94)
where k is the cubic deformation velocity and kω the deformation velocityalong ω:
k = ki · ei = gikkik , kω = ωiki . (5.95)
Equation (5.94) shows that the temporal derivative of ω is uniquely deter-mined by the acceleration a and the characteristics of the continuum.
5.6 Passing from One Galilean Frame to Another
The above description of the motion of a continuum is valid, either in theclassical framework or in the relativistic one, as long as the discussion islimited to a single Galilean frame. In fact, as concerns the “spatial aspect”, therelativistic geometry in a given Galilean frame coincides with the classical one;furthermore, within a single Galilean frame, the time is an absolute quantity inspecial relativity also. As a consequence, if no more than one frame is involved,one would not expect differences between classical and relativistic kinematics.But in the relativistic context there are differences in the transformation lawsof the various relative quantities (of kinematics or dynamics), when passingfrom one reference frame to another. This is true for the single material point(as we have already seen) and also for the continuum (as we will see presently).The reason for such a different behaviour is that, while in the classical situationthe passage from one Galilean frame Sg to another S′
g (assumed to be inx-standard relation, without any loss of generality), is governed by the Galileitransformations
x′ = x− ut , y′ = y , z′ = z , t′ = t , (5.96)
in the relativistic context, one has instead the Lorentz transformations
x′ =1α
(x− ut) , y′ = y , z′ = z , t′ =1α
(t− u
c2x), (5.97)
where α =√
1− u2/c2. In both (5.96) and (5.97), once the Lagrangian coor-dinates yi are fixed, one can pass from the motion relative to Sg: xi = xi(t, y)to that relative to S′
g:

5.6 Passing from One Galilean Frame to Another 187
x′i = x′i(t′, y) . (5.98)
In the relativistic case (5.97) the time t′ is not invariant but depends on theconsidered particle instead:
t′ =1α
(t− u
c2x(t, y)
)= t′(t, y) , (5.99)
and conversely,t = t(t′, y) . (5.100)
In the case of a single material point we have already seen the differentialrelation:
dt′
dt=σ
α, (5.101)
where
σ = 1− 1c2
u · v . (5.102)
Here the same relation holds with the ordinary derivatives with respect totime replaced by partial derivatives and recalling that now v = v(t, y).
Let us start considering the transformation law for the quantity (5.6):
D = det∣∣∣∣∣∣∣∣ ∂x
i
∂yk
∣∣∣∣∣∣∣∣ = D(t, y) ; (5.103)
classically D is invariant with respect to the choice of Galilean frame, but notwith respect to Lagrangian coordinates yi. Let us evaluate then the derivativesof the x′i (given by (5.98)) with respect to yk; using (5.97)1,2,3 with t expressedby (5.100), (5.99) reduces to an identity: t′ = t′; hence ∂t′/∂yk = 0:
0 =1α
[∂t
∂yk− u
c2
(∂x
∂yk+∂x
∂t
∂t
∂yk
)]. (5.104)
It follows that
∂x′1
∂yk=
1α
(∂x1
∂yk+∂x1
∂t
∂t
∂yk− u ∂t
∂yk
),
∂x′2,3
∂yk=∂x2,3
∂yk+∂x2,3
∂t
∂t
∂yk, (5.105)
with ∂t/∂yk derived from (5.104). Introducing the Cartesian velocity withrespect to Sg,
xi =∂xi
∂t→ v = xici , (5.106)
as well as the natural basis,

188 5 Relativistic Kinematics for a Three-Dimensional Continuum
ei =∂xl
∂yicl , (5.107)
one gets the relation
σ∂t
∂yk=
u
c2∂x1
∂yk=
1c2
u · ek . (5.108)
Thus, (5.105) become⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
∂x′1
∂yk=
1ασ
∂x1
∂yk
(σ +
1c2ux1 − u2
c2
)=α
σ
∂x1
∂yk,
∂x′2,3
∂yk=∂x2,3
∂yk+
1c2σ
u∂x1
∂ykx2,3.
(5.109)
Hence, rewriting α/σ in the form
α
σ= 1 +
1c2σ
ux1 + ν = 1 +1− σσ
+ ν ,
implying
ν =α− 1σ
= − 1c2
u2
σ(1 + α), (5.110)
Equation (5.109) can be made more compact as follows:
∂x′i
∂yk=∂xi
∂yk+
1c2σ
u · ekxi + νδi
1
∂x1
∂yk;
after contracting by ci and using the relation δi1ci = c1 = u/u, one has the
corresponding vectorial relation valid in Sg:
e′k = ek + u · ek
(1c2σ
v +ν
u2u),
where e′k is the vector of the natural basis in S′g boosted to Sg. Finally, by
introducing the components of u along ek
uk = u · ek , (5.111)
and using (5.110), we get the general formula
e′k = ek +1c2σ
ukw , (5.112)
withw def= v − u
1 + α. (5.113)
Equation (5.112) represents the fundamental formula for the kinematics ofdeformation of a continuum and in the classical limit, c → ∞, is consistent

5.7 Kinematical Invariants 189
with the invariance property: e′k = ek. From this, one can obtain the relationbetween the two metrics gik and g′ik, locally associated with the continuumwith respect to the two different Galilean frames considered. Moreover, by dif-ferentiation with respect to time of both sides of (5.112) and by using (5.101),one gets the quantities ∂t′e′k, which, like the corresponding quantities in Sg,summarize the (local) angular and deformation velocities of the continuum,with respect to the Galilean frame S′
g. Hence, the associated transformationlaws can be computed (see [2]).
As we will see, the classical invariance properties
k′ik = kik , ω′ik = ωik , ∀Sg, S
′g ,
are not conserved in the relativistic case. It follows that the ordinary notionof rigidity loses its meaning in relativity, in the sense that kik ≡ 0 �⇒ k′ik ≡ 0.
5.7 Kinematical Invariants
Equation (5.112) represents the starting point for obtaining the transforma-tion laws for the main geometrical and kinematical quantities of the contin-uum: gik, gik, kik, ωik, Γh
ik, etc. Before proceeding to derive these laws, weexamine some fundamental relativistic invariants, which we will compare withthe corresponding classical analog. We start by deriving the variation law ofthe determinant (5.6), which coincides with
D = e1 × e2 · e3 (5.114)
orD =
√det||gik|| . (5.115)
From (5.109) one has this determinant relative to S′g:
D′ =α
σdet
∣∣∣∣∣∣
∣∣∣∣∣∣∂1x
1 ∂2x1 ∂3x
1
∂1x2 +X2∂1x
1 ∂2x2 +X2∂2x
1 ∂3x2 +X2∂3x
1
∂1x3 +X3∂1x
1 ∂2x3 +X3∂2x
1 ∂3x3 +X3∂3x
1
∣∣∣∣∣∣
∣∣∣∣∣∣ ,
where, for the sake of brevity, we have used the notation X2,3 = x2,3u/(c2σ);it is easy to verify the relation
D′ =α
σD . (5.116)
The left-hand side of (5.116) is a function of the variables yi and t′, whilethe right-hand side depends on yi and t. Therefore we have to use (5.99) forthe left-hand side and (5.100) for the right-hand side. When c → ∞, onehas D′ = D; in other words, D is not a relativistic invariant with respectto the choice of the Galilean frame, contrary to what happens in classical

190 5 Relativistic Kinematics for a Three-Dimensional Continuum
kinematics. We note that (5.116) has been obtained by means of (5.109), thatis in x1-standard coordinates. Actually it has a general validity, because ofthe intrinsic meaning of both D and D′, as concerns the choice of coordinatesin the respective Galilean frame. The same result can be derived by using(5.114), that is, starting from (5.112). In fact, using the notation
W =1c2σ
(v − u
1 + α
)=
1c2σ
w =⇒ e′k = ek + ukW , (5.117)
one finds the following expression for the product e′1 × e′2:
e′1 × e′2 = e1 × e2 + (u2e1 − u1e2)×W ,
so that
e′1 × e′2 · e′3 = e1 × e2 · (e3 + u3W) + e3 × (u2e1 − u1e2) ·W .
HenceD′ = D + (u3e1 × e2 + u2e3 × e1 + u1e2 × e3) ·W ;
furthermore, because of the duality relations (5.23), we have
ei =1Dei+1 × ei+2 =⇒ ei = Dei+1 × ei+2 , (5.118)
and thusD′ = D(1 + u ·W) . (5.119)
Finally, because of (5.117), one has (1+u ·W) = α/σ, so that (5.119) coin-cides with (5.116). Moreover, (5.116) is associated with a relativistic invariant.In fact, using the relation
∂t′
∂t=σ
α=η′
η, (5.120)
holds not only for a single material point (as we have already seen) but also fora continuum, in the case in which the generic particle is fixed by its Lagrangiancoordinates. Then (5.116) becomes D′ = Dη/η′, giving rise to the followinginvariance property:
η′D′ = ηD = inv. , (5.121)
with the usual substitution of (5.99) or its inverse (5.100). The quantity ηDis invariant with respect to any change of Galilean frame, it has a local mean-ing and, of course, it can be expressed either in the Lagrangian or in theEulerian form. It generates, in turn, a differential invariant; in fact, differenti-ating with respect to t′ both sides of (5.121) and taking into account (5.120)leads to

5.7 Kinematical Invariants 191
∂η′
∂t′D′ + η′
∂D′
∂t′=α
σ
(∂η
∂tD + η
∂D∂t
),
so that, dividing both sides by D′ = Dα/σ > 0, one gets the invariant relation
∂η′
∂t′+η′
D′∂D′
∂t′=∂η
∂t+η
D∂D∂t
= inv. (5.122)
To obtain the classical limit, we note that
∂tη = ∂t(1− v2/c2)−1/2 =η3
c2v · a , (5.123)
so that η → 1 and ∂tη → 0 in the limit c→∞, and (5.122) becomes
1D′
∂D′
∂t′=
1D∂D∂t
= inv. ;
because of the absolute meaning of time, from these equations follows theinvariance property of D.
Equation (5.122) states the invariance of the quantity
B def=∂η
∂t+η
D∂D∂t
, (5.124)
with respect to the choice of the Galilean frame; but the kinematical meaningof B should still be elucidated.
Equation (5.123) clarifies the dynamical meaning of the first term; thus wehave to interpret the ratio ∂tD/D, which is clearly independent of the choiceof the Lagrangian coordinates yi (like η, ∂tη and hence B). The followingLagrangian relation holds (see [3], p. 511):
1D∂D∂t
= div v ≡ ei · ∂iv = k , (5.125)
where k is the cubic deformation velocity, already introduced in (5.95). Toprove this we start from the decomposition (5.81)
div v ≡ ei · (ki + ω × ei) = ei · kikek ,
so thatdiv v = gikkik =
12gik∂tgik , (5.126)
where the last term follows from (5.33). Moreover, div v is related to thedeterminant of gik:
g = det ||gik|| . (5.127)
In fact, denoting by cik the algebraic complement of gik, one has ∂tg =cik∂tgik = ggik∂tgik, so that

192 5 Relativistic Kinematics for a Three-Dimensional Continuum
gik∂tgik =1g∂tg =
2√g∂t√g ,
and hence1√g∂t√g =
12gik∂tgik . (5.128)
Equation (5.126) then becomes
div v =1√g∂t√g . (5.129)
Since, from (5.13),√g = D (5.125) is now proved. Furthermore, the invariant
B, introduced in its Lagrangian form
B = ∂tη + η div v = B(t, y) , (5.130)
can also be cast in the Eulerian form
B(t, x) = B(t, y(x)) =∂η
∂t+ ei ∂η
∂xi+ η
∂ei
∂xi≡ ∂η
∂t+∂η
∂xi(ηei) , (5.131)
where ei(t, x) = vi(t, y(x)) are the Eulerian components of the velocity. Thisis achieved by replacing η with η(t, x) and ∂tη(t, y) with the substantialderivative
∂η
∂t+ ei ∂η
∂xi, (5.132)
in (5.130), besides the obvious replacement of v(t, y) with e(t, x). Finally,taking into account the ordinary decomposition of the 4-velocity V = η(e +cγ), that is, V 0 = cη and V i = ηei, it follows that B is the four-dimensionaldivergence of V:
B(t, x) = Div V = ∂αVα . (5.133)
Equation (5.133) confirms the absolute meaning of B, because the divergenceof a vector is a scalar, invariant under linear transformations (and, in partic-ular, under Lorentz transformations). In fact, under a linear transformationxα → x′α = A′α
βxβ +A′α, we have
A′αβ =
∂x′α
∂xβ; (5.134)
using then the transformation law of the components of a vector V ′α =A′α
βVβ, one obtains
∂′αV ′α = A′αβ∂ρV
β ∂xρ
∂x′α=
∂xρ
∂x′α∂x′α
∂xβ∂ρV
β = δρβ∂ρV
β ,
and hence the invariance property
∂′αV ′α = ∂βVβ = inv. (5.135)

5.8 Dilation Coefficients 193
5.8 Dilation Coefficients
Consider the transformation law of the natural basis {ei} associated with the(arbitrarily fixed) Lagrangian coordinates yi, passing from one Galilean frameSg to another S′
g, i.e. (5.112). The dual of the basis {e′i} is given by
e′i = ei − 1c2α
wiu ; (5.136)
from (5.113) one has1c2
u ·w = α− σ , (5.137)
so that it is easy to check the reciprocity relations
e′i · e′k = δik . (5.138)
Equation (5.112),
e′k =(δik +
1c2σ
wiuk
)ei ,
gives the vectors e′k as the transform of the vectors ek, by means of thedisplacement map A ≡ (Ai
k):
e′k = Aek = Aikei , (5.139)
withAi
kdef= δi
k +1c2σ
wiuk . (5.140)
The inverse A−1 = B of the map A, such that
AijB
jk = δi
k , (5.141)
can be obtained from (5.136):
e′i = Bikek ≡
(δik −
1c2α
wiuk
)ek
= BTei ≡ (BT)kiek ; (5.142)
in fact, the coefficients of B: Bik ≡ ei · (Bek) = (BTei) · ek are given by
Bik = δi
k −1c2α
wiuk . (5.143)
The presence, in C, of the metric tensor gik = ei · ek allows one to introduce,besides the mixed form, the completely covariant and contravariant forms ofthe tensors A and B:⎧⎪⎨
⎪⎩Aik = gik +
1c2σ
wiuk , Aik = gik +1c2σ
wiuk,
Bik = gik −1c2α
wiuk , Bik = gik − 1c2α
wiuk.
(5.144)

194 5 Relativistic Kinematics for a Three-Dimensional Continuum
The representation (5.139) allows one to compare linear, surface and volumeelements, relative to the configurations C and C′ of the continuum, associatedwith two different (arbitrary) Galilean frames Sg and S′
g. From this compari-son, the relative dilation coefficients can be defined.
1. Linear dilation coefficientsLet us compare, first of all, the metric tensors. From (5.112) we have
g′ik = gik + 2εik , (5.145)
εik being the relative deformation tensor5
εik =1
2c2σ
(uiwk + ukwi +
1c2σ
w2uiuk
), (5.146)
or by using (5.113)
εik =1
2c2σ
(uivk + ukvi −
1ση2
uiuk
). (5.147)
Next consider a linear element dP = dyiei, emanating from P ∈ C; letdP′ be the corresponding element in P′ ∈ C′:
dP′ = A dP ≡ dyie′i ,
and decompose dP and dP′ into magnitude and unit vector:
dP = |dP|a , dP′ = |dP′|a′ .
It is quite natural to define as linear dilation coefficient, at P and in thedirection a, the ratio
δadef=|dP′| − |dP||dP| = |Aa| − 1 . (5.148)
We have |Aa| =√
(Aa) · (Aa) =√g′ikaiak, so that from (5.145) it follows
thatδa =
√1 + 2εikaiak − 1 (5.149)
or explicitly
δa =
√1 +
1c2σ
[2(u · a)(v · a)− 1
η2σ(u · a)2
]− 1 . (5.150)
In particular, for a = ei/|ei| = ei/√gii (no sum over repeated indices is
needed here), one has the linear dilation coefficients, in the directions ofthe vectors ei:
5 Here the deformation does not have the usual meaning as for a single continuumin a fixed frame of reference, but it is relative to two different frames.

5.8 Dilation Coefficients 195
δi =
√1 +
1c2σgii
(2uivi −
1η2σ
u2i
)− 1 . (5.151)
Let us now consider the angle Θab formed by the directions a and b ema-nating from P ∈ C: cosΘab = a ·b; the angle formed by the correspondingdirections in P′ ∈ C′ is given by
cosΘ′ab ≡
Aa|Aa| ·
Ab|Ab| =
aie′i · bke′k√g′ikaiak
√g′lmblbm
=g′ikaibk
(1 + δa)(1 + δb),
that is, by using (5.145) and (5.146):
cosΘ′ab =
1(1 + δa)(1 + δb)
{cosΘab +
1c2σ
[(u · a)(v · b)
+(u · b)(v · a)− 1η2σ
(u · a)(u · b)]}
. (5.152)
In particular, for a = ei/|ei| and b = ek/|ek| (no sum over repeated indicesis needed here), one has the angular transformations, corresponding to thevectors ei and ek (shear):
cosΘ′ik =
1(1 + δi)(1 + δk)
[cosΘik
+1
c2σ√giigkk
(uivk + ukvi −
1η2σ
uiuk
)]. (5.153)
2. Surface dilation coefficientsLet us consider an oriented surface element: nd σ, in P ∈ C, and let n′dσ′
be the corresponding element in P′ ∈ C′; we can determine the relationbetween the two surface elements, with the usual assumption of boostingn′ dσ′ onto Sg. We have
n dσ = dP× dQ = dyi ei × dzk ek =√gεikh dyi dzk eh
where εikh is the Levi-Civita alternating symbol; similarly, one must as-sume:
n′ dσ′ = (AdP)× (AdQ) = dyi e′i × dzk e′k =√g′εikh dyi dzk e′h
= ηikh dyi dzk e′h .
It follows, from comparison, that
n′ dσ′ =
√g′
g(n dσ · eh)e′h
or by using (5.136)

196 5 Relativistic Kinematics for a Three-Dimensional Continuum
n′ dσ′ =
√g′
g(n dσ − 1
c2αn dσ ·wu) .
Furthermore, the Jacobian determinants
D = det∣∣∣∣∣∣∣∣ ∂x
i
∂yk
∣∣∣∣∣∣∣∣ ≡ √g , D′ = det
∣∣∣∣∣∣∣∣∂x
′i
∂yk
∣∣∣∣∣∣∣∣ ≡√g′ ,
satisfy the invariance property (5.121):
ηD = η′D′ = inv. ⇒ D′
D =η
η′=α
σ;
thus the previous relation becomes
n′ dσ′ =α
σ(n dσ − 1
c2αn dσ ·wu) . (5.154)
From this equation we get the surface dilation coefficient in the directionn:
δσdef=
dσ′ − dσdσ
, (5.155)
or explicitly
δσ =α
σ
√1− 2
c2α(n ·w)(n · u) +
1− α2
c2α(n ·w)2 − 1. (5.156)
3. Volume dilation coefficientsThe cubic dilation coefficient δc is defined by
δcdef=
dC′ − dCdC
=D′
D − 1 =α
σ− 1 , (5.157)
using (5.121).
In the limit c → ∞ all the dilation coefficients vanish. For v = 0, instead,Sg is the local rest frame of the continuum and the above relations refer to theway in which the continuum (in relative uniform translational motion, withrespect to S′
g) differs from the rigidity condition.Having defined the local deformation coefficients, we can start studying the
transformation laws for the angular and deformation velocities.
5.9 Transformation Laws for Angularand Deformation Velocities
Our purpose now is to obtain the gradient of the continuum velocity v′(t′, y),with respect to S′
g. To this end it is enough to differentiate the relation (5.112)with respect to t′, using (5.101):

5.9 Transformation Laws for Angular and Deformation Velocities 197
∂t′ =α
σ∂t . (5.158)
This gives
∂t′e′i =α
σ
[∂tei +
ui
c2σ∂tw +
1c2σ
(u · ∂tei −
1σ∂tσui
)w],
with∂tw = ∂tv = a, ∂tσ = − 1
c2u · a . (5.159)
Thus, by using the identities
∂tei = ∂iv , ∂t′e′i = ∂iv′ , (5.160)
and introducing the map A defined by (5.139), we have
∂iv′ =α
σA
(∂iv +
1c2σ
uia). (5.161)
The same result can, obviously, be obtained from the theorem of relativemotions:
v′ =1σ
(αv − α+ σ
1 + αu), (5.162)
by differentiating both sides with respect to yi, which appear only in v and σ.In scalar terms, we can set ∂iv′ = h′ike′k, analogously to ∂iv = hikek; using
(5.139), eh · e′k = Ahk, (5.161) becomes
h′ik =α
σAh
k
[hih +
1c2σ
uiah +1c2σ
uj
(hij +
1c2σ
uiaj
)wh
]
or
h′ik =α
σAh
kAhj
(hij +
1c2σ
uiaj
), (5.163)
as from (5.140). The tensor h′ik summarizes (locally) the angular and defor-mation velocities of the continuum with respect to S′
g, analogously to hik inSg:
h′ik = k′ik + ω′ik , hik = kik + ωik , (5.164)
so that (5.163) contains the sought-for relations. Here, clearly, k′ik dependseither on the deformation velocity kik and the angular velocity ωik or on aand u; an analogous dependence has ω′
ik. In the classical situation (c→∞),we have k′ik = kik and ω′
ik = ωik, which give an absolute meaning to both thedeformation and the angular velocities, in contrast to the relativistic situation.Now, from (5.161), one has the expression for the local angular velocity ω′:
ω′ =12e′i × ∂iv′ ; (5.165)

198 5 Relativistic Kinematics for a Three-Dimensional Continuum
by using (5.136) and (5.137), we then have
ω′ =12α
σei ×A
(∂iv +
1c2σ
uia)
− 12c2α
u× α
σA[wi∂iv +
(ασ− 1)a]
=12α
σei ×A(∂iv)− 1
2c2αu× α
σA(wi∂iv − a) .
Otherwise, from the form (5.139) of A, it follows that
ei ×A(∂iv) = 2ω +1c2σ
ei × (u · ∂iv)w ,
and, by using the decomposition (5.84)
∂iv = ki + ω × ei, (5.166)
we haveu · ∂iv = (ku − ω × u) · ei , (5.167)
where ku is the deformation velocity along u, already introduced:
ku = uiki . (5.168)
Moreover, (5.137) implies
ei ×A(∂iv) = 2ω +1c2σ
(ku − ω × u)×w
=(1 +
α
σ
)ω +
1c2σ
(ku ×w− ω ·wu) ;
the expression for ω′ is then
ω′ =12α
σ
(1 +
α
σ
)ω +
12c2σ
[α
σ(ku ×w− ω ·wu)
+u×A(a + kw − ω ×w)], (5.169)
where kw = wiki is the deformation velocity along w. Equation (5.169) canbe further developed by expanding the vector product u × A(ω × w), using(5.137) and (5.139):
u× A(ω ×w) = u×(ω ×w +
1c2σ
ω ×w · uw)
= c2(α− σ)ω − (ω · u)w − 1c2σ
(u×w · ω)u×w ;

5.9 Transformation Laws for Angular and Deformation Velocities 199
the general expression then follows:
ω′ =12
(1 +
α2
σ2
)ω +
12c2σ
[H + u ×A(K)] , (5.170)
where⎧⎨⎩
H =α
σ(ku ×w − ω ·wu) + ω · uw +
1c2σ
(ω · u×w)u×w,
K = a− kw.
(5.171)
In the classical case (c → ∞), (5.170) reduces to the invariance propertyω′ = ω, as expected; in the relativistic case, instead, one has a typical mixingof the various kinematical quantities: the angular velocity ω′ has no longer aninvariant meaning, being a function of u and v (through σ and w), a, ω andalso of the deformation velocity (through ku and kw).
Let us now determine the transformation law of the deformation velocities:ki = ∂iv − ω × ei.
From (5.170) and (5.139), we have
ω′ × e′i =12
(1 +
α2
σ2
)ω ×Aei +
12c2σ
[H×Aei
+u ·A(ei)A(K) −A(ei) · A(K)u] .
Using then the identityAT(u) =
α
σu , (5.172)
and the commutation property of the scalar product leads to
ω′ × e′i =12
(1 +
α2
σ2
)ω ×A(ei)
+1
2c2σ
(H×A(ei) +
α
σuiA(K)−ATA(ei) ·Ku
).
Next, taking into account (5.161), we have
k′i = ∂iv′ − ω′ × e′i
= A(∂iv) − 12
(1 +
α2
σ2
)ω ×Aei +
12c2σ
[ασuiA(2a−K)
−H×Aei +ATAei ·Ku]
; (5.173)
moreover, from (5.167), it follows that
A(∂iv) = ∂iv +1c2σ
(∂iv · u)w
= ki + ω × ei +1
2c2σ(ku − ω × u) · eiw ,

200 5 Relativistic Kinematics for a Three-Dimensional Continuum
and, from (5.171)1 and the (already used) identity (5.172),
−H×Aei =α
σ(w ·Aeiku − ku · Aeiw + ω ·wu×Aei)
−ω · uw × ei −1c2σ
(ω · u×w)(ασuiw −w · Aeiu
).
Equation (5.173) thus becomes
k′i =
α
σki −
12
(1− α
σ
)2ω × ei +
α
2c2σ2
[−ui
(ασ
+σ
α
)ω ×w
−2(ω × u)iw + ω ·wu×Aei −σ
αω · uw × ei
− 1c2σ
(ω · u×w)(uiw −
σ
αw · Aeiu
)+ ku · ei
+w · Aeiku + ui(kw + Aa) +σ
αATAei · (a− kw)u
], (5.174)
where the identity ku ·w = kw ·u has been used and the product ATA is suchthat
ATA(ei) = ei +1c2σ
(uiw + wiu +
1c2σ
w2uiu). (5.175)
In the classical case (c→∞), (5.170) reduces to the invariance k′i = ki, as
expected; in the relativistic case, instead, as for the angular velocity, one hasa mixing of the various kinematical quantities, k′
i being a function of ki, uand v (through σ and w), a and also of the angular velocity ω.
Equations (5.170) and (5.174) have a general validity, because they refer toany continuously deformable system; they show that the classical notion ofrigidity is meaningless in a relativistic context: in fact, the absence of defor-mations in Sg: ki = 0, has no absolute meaning, since in general k′
i �= 0:
k′i = −1
2
(1− α
σ
)2ω × ei +
α
2c2σ2
[−ui
(ασ
+σ
α
)ω ×w
−2(ω × u)iw + ω ·wu×Aei −σ
αω · uw × ei
− 1c2σ
(ω · u×w)(uiw−
σ
αw · Aeiu
)
+uiAa +σ
αATAei · au
]�= 0 . (5.176)
Similar to the deformation velocity (5.176), in the rigid case (in Sg) whereki = 0, the transformation for the angular velocity reduces to the form
ω′ =12
(1 +
α2
σ2
)ω +
12c2σ
[−ασω ·wu
+ω · uw +1c2σ
(ω · u×w)u×w + u ×Aa]. (5.177)

5.10 Born Rigidity. Thomas Precession 201
5.10 Born Rigidity. Thomas Precession
Equations (5.170) and (5.174) are completely general as concerns the motionof the continuum and the choice of the two Galilean frames Sg and S′
g. Letus assume that Sg be the rest frame for some particular element P of thecontinuum; this means that at P:
v = 0 , ⇒ σ = 1, u = −v′ , α = 1/η′ , (5.178)
and hence, from (5.113)
w =η′
1 + η′v′ . (5.179)
Thus, we have the following expressions for ω′ and k′i:
ω′ =12
(1 +
1η′2
)ω0 +
12c2η′
(H0 − η′v′ ×A0K0), (5.180)
k′i =
1η′
k0i +
12
(1− 1
η′
)2
ω0 × e0i
+1
2c2(1 + η′)·[(η′ +
1η′
)v′iω
0 × v′ + 2(ω0 × v′) · e0i v
′
+ω0 · v′v′ × (η′e0i −A0e0
i )− k0v′ · e0
i v′ − v′ ·A0e0
i k0v′
−v′i(k0
v′ +1 + η′
η′A0a0
)− η′A0TA0e0
i ·(
1 + η′
η′a0 − k0
v′
)v′],
where ω0 and k0i are the proper angular and deformation velocities, and
(5.136), (5.139), (5.171) and (5.175) reduce to
H0 =η′
1 + η′[(1 − η′)ω0 · v′v′ − k0
v′ × v′] , K0 = a0 − η′
1 + η′k0
v′ ,
e′i = e0i −
1c2
η′
1 + η′v′iv
′ , A0( ) = ( )− 1c2
η′
1 + η′( ) · v′v′,
A0TA0e0i = e0
i −1c2v′iv
′ ,
and, finally, the proper acceleration a0 is related to a′ by the composition law(2.115)
a′ =1η′2
(a0 − 1
c2η′
1 + η′v′ · a0v′
).
Thus, omitting the prime, the following relations hold in any Galilean frame:
ω =12
(1 +
1η2
)ω0 +
12c2(1 + η)
[(1 − η)ω0 · vv − (1 + η)(k0
v × v + v × a0)],
ki =1ηk0
i +12
(1− 1
η
)2
ω0 × e0i (5.181)

202 5 Relativistic Kinematics for a Three-Dimensional Continuum
+1
2c2(1 + η)· (5.182)
{(η +
1η
)v0
iω0 × v + 2(ω0 × v) · e0
i v
+(η − 1)ω0 · vv × e0i −
1 + η
ηv0
i k0v +[(η − 1)e0
i −1c2ηv0
i v]· k0
vv
−1 + η
η(v0
i a0 + ηa0 · e0
i v) +1c2
(2 + η)v0i a
0 · vv},
where⎧⎪⎨⎪⎩
a0 = η2
(a +
1c2
η2
1 + ηa · vv
), e0
i = ei +1c2
η2
1 + ηviv,
v0i = v · e0
i = ηvi.
(5.183)
So far, we find that in the motion of a continuum, with respect to an arbi-trary Galilean reference frame Sg, the values of the angular and deformationvelocities ω and ki are related to the proper values ω0 and k0
i by the followingequations:
ω =12
(1 +
1η2
)ω0 +
12c2η
[1− η1 + η
ω0 · vv − v × (η2a− k0v)], (5.184)
ki =1ηk0
i +12
(1− 1
η
)2
ω0 × ei (5.185)
+1
2c2(1 + η)·
{2ηviω
0 × v + 2(ω0 × v) · eiv
+(η − 1)ω0 · vv × ei − η2(1 + η)(via + aiv) − (1 + η)vik0v
+[(η − 1)ei −
2η2
c2(1 + η)viv]· k0
vv}.
In a relativistic context, the following definition of rigid motion is veryuseful: a continuum is said to move rigidly in the sense of Born [4] if theproper deformation velocity vanishes identically:
k0i = 0 , ∀t,P ∈ C , (i = 1, 2, 3) . (5.186)
This is obviously an absolute property of the motion, which must not be con-fused with rigidity in the classical sense. Then (5.186) implies that, in everyGalilean frame, there is deformation; more precisely, from (5.184) it followsthat
ω =12
(1 +
1η2
)ω0 +
12c2η
[1− η1 + η
ω0 · vv − η2v × a], (5.187)

5.11 Material Continuum. Number and Matter Density 203
ki =12
(1− 1
η
)2
ω0 × ei (5.188)
+1
2c2(1 + η)·
[2ηviω
0 × v + 2(ω0 × v) · eiv
+(η − 1)ω0 · vv × ei − η2(1 + η)(via + aiv)]�= 0.
Moreover, for each continuum motion, the local angular velocity is relatedto the spatial deformation gradient by means of (5.92); thus, in the case ofa Born-rigid motion of the continuum the proper angular velocity ω0 has aglobal meaning in C, in the sense that at each instant it is independent of theparticle:
∂iω0 = 0 . (5.189)
Clearly, ω0 is not an absolute constant; in fact, according to (5.94):
∂tω0 =
12curla0 �= 0 . (5.190)
On the other hand the angular velocity, relative to a generic Sg, has no globalmeaning, like ω0, because it depends on both the velocity v of the continuumand the acceleration a. More precisely, from (5.187)1 we have
ω =12
(1 +
1η2
)ω0 +ψ , (5.191)
with
ψdef=
12c2η
[1− η1 + η
ω0 · vv − η2v × a]. (5.192)
Thus, besides the deformation one has an angular precession ψ, dependent onv and a as well as on ω0 (it is independent of ω0 only if ω0 is perpendicularto v). In the first approximation, we re-obtain the Thomas precession [5]:
ψ � − 12c2
v × a . (5.193)
5.11 Material Continuum. Number and Matter Density
Given a geometrical continuum C in Sg, one can pass to a material oneby defining in C a function μ = μ(t, y) representing the relative materialdensity; with the generic element of the continuum in an initial volumedC = dy1 dy2 dy3 in C, is then associated the elementary mass:
dm = μD dC . (5.194)

204 5 Relativistic Kinematics for a Three-Dimensional Continuum
This can be done in any Galilean frame; thus, in S′g, the mass of the element is
given by dm′ = μ′D′ dC, and this must satisfy the transformation law (3.52)
dm′ =σ
αdm . (5.195)
Equation (5.195) induces a transformation law for the density μ. In fact, from(5.116), we have
dm′ =α
σ
μ′
μdm ,
so that (5.195) gives rise to the transformation law of the density
μ′ = μ(σα
)2
, (5.196)
as well as to a finite invariant
μ′
η′2=
μ
η2= inv. (5.197)
Condition (5.194) can be easily explained in terms of the substitution the-orem for multiple integrals, according to which the measure element in Cis expressed, in Cartesian coordinates, by the product dx1 dx2 dx3, and ingeneric curvilinear coordinates yi by |D(y1, y2, y3)|dy1 dy2 dy3, with D theJacobian determinant of the transformation xi = xi(y1, y2, y3). In our case,since D > 0, the measure element is given by D dC. We also note that the rel-ative scalar 1/D has the meaning of particle number density. Thus a materialcontinuum is a geometrical one endowed with a matter density μ. For each ofits elements, because of (5.194) and (5.195), we can apply the above analysisof the material point.
When c→∞, we recover the classical invariance of the density, with respectto changes of Galilean frames: μ′ = μ. In relativity, instead, the ratio μ/η2
is invariant, and the density, once known in a certain frame, is also known inany other frame through (5.197); it will depend on the relative velocity u ofS′
g with respect to Sg as well as on the velocity v(t, y) of the element of thecontinuum in Sg; that is, we have now a dynamical notion of mass.
5.12 Absolute Kinematics. Proper Quantities
From the absolute point of view a three-dimensional continuous system isrepresented by the ∞3 world lines of the single particles, all future-oriented,and not intersecting each other since the continuum should be thought of asthe set of ∞3 distinct material points (at each instant and in every Galileanframe). In other words, the evolution of a continuum is geometrically definedby a unit timelike vector field, whose flow lines are the histories of the particlesof the continuum itself. In this sense, the family Γ of such lines represents a

5.12 Absolute Kinematics. Proper Quantities 205
generalization of those special (linear) congruences, characterized by constantvector fields, which represent the Galilean frames. In that case, they are globalcongruences, because the straight lines cover all M4; for a generic continuum,instead, the flow lines cover only a certain world tube T ∈M4.
Once a Galilean frame (that is a temporal direction γ and the associatedspatial platform Σ) is fixed, the configurations of the continuum C, relativeto the various instants t, coincide with the plane sections of the tube T ,orthogonal to γ, or with their spatial projections onto the reference spatialplatform Σ. In the interior of T , besides the world lines of the particles, isdefined the 4-velocity V. This is determined from the equations of the worldlines
x0 = ct , xi = xi(t, y) , (5.198)
by differentiation with respect to the proper time τ of each particle, given by
τ(t0, t, y) =1c
∫ t
t0
√−mαβ xαxβdt
=∫ t
t0
√1− v2(t, y)
c2dt , (5.199)
depending on yi that is on the considered particle. The 4-velocity V can beobviously expressed either in Lagrangian or Eulerian terms, because of theinvertibility of (5.198)2. The 4-velocity corresponding to the generic pointE ∈ T : V(E) defines the tangent vector, at E, to the corresponding particleworld line or the 4-velocity in its rest frame S0. In S0, the relative velocity ofthe particle, at E, vanishes: v0 = 0, and the invariant relations, in the passagefrom one Galilean frame to another, assume a precise meaning. They are theproper quantities, i.e. relative to S0; thus, (5.121) gives rise to the invariant
D0(t, y) = ηD ≡ D(t, y)√1− v2(t, y)
c2
> 0 , (5.200)
which characterizes the proper volume element dC0 ≡ D0dC with respectto fixed Lagrangian coordinates. Hence, the proper numerical density of theparticles 1/D0 follows. Similarly, from (5.197) one gets the proper density ofproper mass:
μ0(E) =μ
η2≡ μ(t, y)
[1− v2(t, y)
c2
]∼ μ0 =
dm0
dC0. (5.201)
Finally, we have seen that (5.122) is closely related to a first-order differen-tial invariant, namely the divergence of the 4-velocity: ∂αV
α. However, from(5.199)
ddτ
= η∂t = η( ). , (5.202)

206 5 Relativistic Kinematics for a Three-Dimensional Continuum
we have the following transformation of (5.122):
B = ∂tη +η
D∂tD =1D∂t(ηD) =
1ηD
ddτ
(ηD) =1D0
dD0
dτ.
Thus the invariant B, defined by (5.130), turns out to be related either to the4-velocity V, because of (5.133), or to the invariant D0(E) = D0(x):
B(t, y(x)) = B(t, x) = ∂αVα . (5.203)
From this follows a differential relation between D0 and V (as a consequenceof (5.125), in the instantaneous rest frame):
1D0
ddτD0 = ∂αV
α . (5.204)
This equation, since D0 = D0(x) and dD0/dτ = V α∂αD0, implies the con-servation of proper numerical density :
∂α
(1D0
V α
)= 0 , ∀E ∈ T . (5.205)
Note. From the various examples of scalar quantities that we have studied inthe preceding sections, one sees clearly the difference between scalar functionsof the event E and scalar invariants with respect to the Lorentz transforma-tion: the latter depend only on the event E, while the former depend on othervariables also.
For example, for a given continuous system in motion, the quantities η,∂t(ηD) are all scalar functions, but not scalar invariants, because they dependon the considered Galilean frame besides the chosen event E ≡ (xα) ≡ (t, x);more precisely, they are functions of the surface element, containing E andγ ∈ C+
3 . The products ηD, ∂t(ηD)/D are scalar invariants, because they do notdepend on the chosen Galilean frame, but only on the event E ≡ (xα) ≡ (x′α).
References
1. G. Ferrarese, Lezioni di meccanica razionale, Vol. I, Ed. Pitagora, Bologna (1980).176
2. L. Stazi, Sulla cinematica relativistica delle deformazioni di un continuo tridi-mensionale, Rend. Mat. Roma, 12, 209–220 (1979). 189
3. G. Ferrarese, Lezioni di meccanica razionale, Vol. II, Ed. Pitagora, Bologna(1980). 191
4. M. Born, Die Theorie des starren elektrons in der kinematik des relativitatprinzipes, Ann. Phys. (Leipzig), 30, 1–56 (1909). 202
5. L.W. Thomas, On the kinematics of an alectron with an axis, Philos. Mag., 7,1–22 (1927). 203

6
Elements of Classical Dynamicsof a Continuum
6.1 Introduction to Continuum Classical Dynamics
Once the essential geometrical–kinematical quantities (relative or absolute)necessary for the description of a three-dimensional continuum have beenintroduced, we can move on to the fundamental dynamical aspects of therelativistic theory. First of all, let us examine the classical framework of theequations of the continuum dynamics in the context of the Galilean frameswhere such equations are invariant. The passage to an arbitrary rigid frameis obtained with the usual procedure adding to the equation of motion theinertial forces (dragging and Coriolis forces). As for the kinematical case, herewe limit ourselves to the essential elements of the dynamics.1
Following the notation already introduced, let Sg be a Galilean frame, asso-ciated with an arbitrary Cartesian orthogonal triad: T ≡ O c1 c2 c3; let C bethe actual configuration (in Sg) of the continuum system S, xi (i = 1, 2, 3) theCartesian coordinates of the generic point P ∈ C and c an arbitrary portionof C with boundary σ.
In the continuum scheme, the mechanical action is represented by two kindsof force:
1. mass or volume forces, specified by a characteristic vectorial functionF(P, ...), defined in C, in the sense that, for any portion c ∈ C, the re-sultant force and the resultant moment (with respect to O) of such forcesare expressed, respectively, by the following volume integrals:
r[c] =∫
c
μF dC , mO[c] =∫
c
OP× μF dC ; (6.1)
2. contact or surface forces, specified by the vectorial function φn(P), definedon the boundary of C and for each direction n: specific stress at P relativeto the direction n. This is a vectorial function depending on P as well as
1 For a more detailed discussion the reader may refer to [1], p. 525 and [2], p. 181.
G. Ferrarese and D. Bini: Elements of Classical Dynamics of a Continuum, Lect. Notes Phys.
727, 207–237 (2008)
DOI 10.1007/978-3-540-73168-9 6 c© Springer-Verlag Berlin Heidelberg 2008

208 6 Elements of Classical Dynamics of a Continuum
n dσ
dσ
a) b)
φ dσ
μFdCσ c
C
P
P
Fig. 6.1. Distribution of forces and stresses for a continuum
on the direction n, i.e. on the considered 3-plane in P (see Fig. 6.1), suchthat, for any surface σ ∈ ∂C, the resultant of force and moment (withrespect to O) of such forces are expressed, respectively, by the followingsurface integrals:
r(i)[σ] =∫
σ
φn dσ , m(i)O [σ] =
∫σ
OQ× φn dσ . (6.2)
Adapting, now, the fundamental equations of the mechanics to the arbitraryportion c of the continuum and passing to the limit c→ P , with the necessaryregularity hypothesis, one gets the following (local) Eulerian conditions, whichare no longer depending on the limit itself:
I Cauchy theorem, which specifies the dependence of the specific stresses onn:
φn = niφi , φi = φn
∣∣∣∣n=ci
; (6.3)
hence, φn is a linear and homogeneous function of the director cosines ofn in each point of the boundary of C: ∂C.
II First indefinite equation:
μe = μF− ∂iφi , (6.4)
where the dot denotes the substantial derivative
( ). def= ∂t( ) + ei∂i( ) (6.5)
III Second indefinite equation, that is reciprocity relations for the stresses:
φn · n′ = φn′ · n , ∀n,n′ (6.6)

6.1 Introduction to Continuum Classical Dynamics 209
To these (Eulerian) equations one must add the continuity equation, whichrepresents the principle of mass conservation in local form. More precisely,in the classical situation, for each particle of the continuum the masselement
dm = μD dC , dC = dy1 dy2 dy3 , (6.7)
being invariant with respect to the choice of the Galilean frame Sg, isindependent on t (in Sg):
μD = const. , ∀yi fixed . (6.8)
In Lagrangian form, (6.8) is equivalent to the condition
∂t(μD) = 0 , ∀ t, yi , (6.9)
and, from here, one has the Eulerian form
(μD). = 0 , ∀ t, xi , (6.10)
where D(t, x) def= D(t, y(x)). Thus, using (5.125) and (6.9), this last rela-tion can be cast in the form
D
D= dive ≡ ∂ie
i (6.11)
and gives the ordinary continuity equation: μ+μ div e = 0. This equation,in turn, using (6.5), can be transformed to obtain the following:
IV principle of mass conservation:
∂tμ+ ∂i(μei) = 0 . (6.12)
The scheme of the continuum is somehow incomplete. In fact, the evalua-tion of the kinetic energy, defined, for each part c ∈ C of the continuum,by the integral
T [c] =12
∫c
μe2dC , (6.13)
implies that the kinetic energy of each element can be confused as thatof the centre of mass only, neglecting the motion relative to the centreof mass itself. In other words, the continuum scheme ignores the thermalenergy. Because of this evaluation defect, in the continuum scheme theenergy theorem is a direct consequence of the equations of motion, as forthe case of the single particle. It can be written in the usual form:
T [c] = W [c] , W [c] = W (e)[c] +W (i)[c] , (6.14)
with W (e)[c] the power of the external forces (mass forces in c and contactforces on the surface σ) and W (i)[c] the power of the internal (contact)forces, that is:

210 6 Elements of Classical Dynamics of a Continuum
W (i)[c] =∫
c
φi · ∂ie dC . (6.15)
The above-mentioned defect of the scheme can be avoided by correctingthe energy theorem (6.14) with the aid of the first law of thermodynamics,summarized by the following three axioms:(a) each portion c of the continuum has an internal energy E [c]:
E [c] =∫
c
μ ε dC , (6.16)
where ε is the specific (i.e. for unit mass) internal energy;(b) the heat is also energy (apart from a conversion factor) which enters
the energy conservation law through its power Q[c] (heat absorbed, inalgebraic sense, by c per unit time):
Q[c] =∫
c
μ q dC , (6.17)
where q is the specific (i.e. per unit mass) thermal power ;(c) for any portion c ∈ C, the following balance relation holds:
T + E = W (e) +Q , (6.18)
which corrects (6.14). Hence, using the mass conservation (6.12),(6.18) assumes the form E = Q−W (i), which can be put in the localform:
V First law of thermodynamics:
ε = q − 1μw(i) , (6.19)
with w(i) the specific power of the internal (contact) forces, i.e. per unitvolume:
w(i) = φi · ∂ie . (6.20)
Equation (6.20) can be rewritten in its Eulerian form using the relation
∂ie =(c)
k ik ck + ω × ci. (6.21)
For ordinary continua, such a power is independent of the angular velocity.This follows from (6.6); in fact, if one introduces the Eulerian stress tensorX ik (i, k = 1, 2, 3), by means of the decomposition
φi = X ikck , (6.22)
then, using (6.3), (6.6) becomes (X ik−Xki)nin′k = 0; thus, the symmetry
propertyX ik = Xki, (i, k = 1, 2, 3) (6.23)

6.2 Lagrangian Form of the Fundamental Equations 211
holds, and (6.20) assumes the form
w(i) = X ik(c)
k ik , (6.24)
with(c)
k ik denoting the deformation velocity, in Eulerian form:
(c)
k ik=12
(∂
∂xiek +
∂
∂xkei
). (6.25)
6.2 Lagrangian Form of the Fundamental Equations
We now briefly recall some concepts of the Lagrangian mechanics of continua.The relativistic Cauchy equation (6.4) is of Eulerian kind and can be cast intothe corresponding Lagrangian form without changing the (arbitrarily chosen)Galilean frame Sg.
Let yi (i = 1, 2, 3) be a set of Lagrangian variables in Sg, which we will in-terpret as the curvilinear coordinates of the points in the actual configurationC of the continuum. Let {ei} be the natural basis relative to the coordinatesyi, gik = ei · ek the Lagrangian metric with associated Christoffel symbols ofthe second-type Γh
ik, and the covariant derivative be denoted by ∇i. The par-tial derivatives of the basis vectors give the following geometrical–kinematicalrelations:
∂iek = Γhikeh , ∂tei = ∂iv ≡ (∇iv
k)ek , (6.26)
where v = vkek is the Lagrangian velocity, ∂i = ∂/∂yi and ∂t = ∂/∂t.The velocity gradient summarizes the two fundamental tensors: ωi
k (angularvelocity) and ki
k (deformation velocity):
∇ivk = ωi
k + kik . (6.27)
Introducing the dual basis {ei} of {ek} with ei ·ek = δik, the symmetric tensor
kik = gijkjk assumes the form
kik =12(∇ivk +∇kvi) =
12∂tgik ; (6.28)
similarly, the antisymmetric tensor ωik = gijωjk = (∇ivk −∇kvi)/2 is equiv-
alent to the vector
ω = ei × ∂tei =12ωikei × ek , ωik = ω · ei × ek . (6.29)
The Lagrangian form of the continuum dynamical equations is obtained bytransforming F and q, defined by (6.4) and (6.19); this requires the introduc-tion of the Lagrangian stresses Yi:

212 6 Elements of Classical Dynamics of a Continuum
Yi =∂yi
∂xkφk =
∂yi
∂xkXkjcj . (6.30)
In detail, as concerns (6.4), one should take into account the following:
1. on the left-hand side one has the substantial derivative, which, inLagrangian terms, becomes the partial derivative ∂t;
2. the divergence of the vectors φi becomes
∂
∂xiφi =
1√g∂i(√gYi) . (6.31)
In fact, from (6.30), one has
∂
∂xiφi =
∂
∂xi
(∂xi
∂ykYk
)=∂yh
∂xi
∂
∂yh
(∂xi
∂ykYk
)
= ∂hYk ∂yh
∂xi
∂xi
∂yk+ Yk ∂2xi
∂yh∂yk
∂yh
∂xi;
next, using∂yh
∂xi
∂xi
∂yk= δh
k ,
and the relations
∂2xi
∂yh∂yk
∂yl
∂xi= Γl
hk, Γhhk =
1√g∂k√g , (6.32)
one gets (6.31):
∂
∂xkφk = ∂kYk + Γh
hkYk =1√g∂i(√gYi) .
Equation (6.4) then becomes
μ∂tv = μF− 1√g∂i(√gYi) ; (6.33)
introducing the Lagrangian stress characteristics Y ik which are symmetric,like the corresponding Eulerian quantities X ik, and defined by
Yi = Y ikek , (6.34)
Equation (6.33), in scalar terms, then becomes
μak = μF k −∇iYik , (6.35)

6.3 Isotropic Systems 213
and using the Lagrangian form of (6.12) (mass conservation)
∂tμ+ μ∇ivi = 0 (6.36)
leads toμ∂tv
k = μF k −∇iYik − μkvk , (6.37)
with k = gikkik the cubic dilation coefficient. Equation (6.33) and its equiv-alent (6.37) give the acceleration in terms of the sources and will be used inthe intrinsic formulation of continuum mechanics [3].
Finally, the power of the internal forces (6.24), in Lagrangian terms, stillhas the same structure
w(i) = Y ikkik; (6.38)
kik can now be expressed either by means of the velocity vk or the Lagrangianmetric gik:
kik =12∂tgik . (6.39)
Equation (6.38) then assumes the form
w(i) =12Y ik∂tgik , (6.40)
so that for each particle (i.e. for fixed yi) w(i)dt is a differential form in thevariables dgik:
w(i) dt =12Y ik dgik, (yi = fixed) . (6.41)
6.3 Isotropic Systems
In Lagrangian terms the fundamental equations are (6.8) and (6.35), that is⎧⎨⎩μak − μF k +∇iY
ik = 0 , (k = 1, 2, 3)
μD − μ∗ = 0 , D =√g,
(6.42)
which involve the mass density μ, the particle number density 1/D, the accel-eration ak and the stresses Y ik; the mass force F k and the reference density μ∗are assumed to be assigned; however, comparing with the Eulerian framework,we now have the presence of the metric gik, either through the Christoffel sym-bols or, explicitly, in D; furthermore, all the components are referred to thebasis {ei} related to the continuum itself and, hence, the variable with it. Inother words, the Lagrangian dynamics is not exhausted in the relations (6.42),involving the metric gik and the same basis {ei}; from the point of view ofthe variables the evolutionary problem is enlarged and an intrinsic Cauchyproblem can be formulated too (see below).

214 6 Elements of Classical Dynamics of a Continuum
By using the identity ∂tei ≡ ∂iv, we have
a = ∂t(viei) = (∂tvi)ei + vi∂iv ,
and thus the system (6.42) can be written, in terms of the velocity, in thefollowing form:
⎧⎪⎨⎪⎩μ(∂tv
k + vi∇ivk)− μF k +∇iY
ik = 0 , (k = 1, 2, 3),
1μ∂tμ+ div v = 0 .
(6.43)
In either form, Lagrangian or Eulerian, however, the number of equations(four) is different from the number of the unknowns (ten, without consideringthe metric). This should not be surprising, because the equations obtained donot yet take into account the physical properties of matter which is schema-tized by the continuum; in this sense, they are valid for a fluid, a solid, anelastic system as well as a plastic one, for reversible or irreversible transfor-mations.
To get the number of equations equal to the number of unknowns, onemust introduce the characteristic properties of the considered material. Forinstance, the isotropic property, which we are going to discuss, is enough toreduce to seven the number of the unknowns.
Let us note that, once the reference configuration C∗ and the correspondingmetric g∗ik are fixed, the stress tensor Y ik and the deformation tensor ε∗ik =(gik−g∗ik)/2, pulled back to C∗, are both symmetric; hence, they each have atriad of eigenvectors with respect to g∗ik: the stress and deformation principaltriads, respectively.
We will call the continuum isotropic2 if it admits a configuration C∗ suchthat the principal deformation triad, relative to the displacement C∗ → C, isalso a principal tension triad with respect to the metric g∗ik of C∗ for eachtransformation of the system and for each C.
This definition uses the concepts of deformation and stress only; the pre-ferred configuration C∗, whose existence is postulated, enters only throughthe Lagrangian metric g∗ik; thus, the invariance with respect to the choice ofthe Lagrangian coordinates yi is complete.
The property that the Lagrangian stress tensor Y ik should admit, with re-spect to the reference metric g∗ik, the same eigendirections of the deformationtensor εik, has an important consequence: the stress tensor Y ik is necessarilya polynomial function of the second degree in ε∗ik (see [4], p. 42):
Yik = pδk
i + qε∗ik + rε∗i
jε∗jk , (6.44)
withYi
k def= g∗ijYjk , ε∗i
k def=12g∗kj(gij − g∗ij) , (6.45)
2 This definition is due to A. Signorini, see [4] p. 136.

6.4 Symbolic Relation of Continuum Mechanics 215
where the metric g∗ik is the reciprocal of g∗ik. Equation (6.44) shows thatthe stress tensor can be expressed in terms of the three scalars p, q and r,reducing to three its components; obviously, the metrics gik of C and thatg∗ik of C∗ are both involved.
A nonviscous fluid, that is, a continuum which in any configuration C hasthe specific stress reduced to a single pressure: φu = puu, with pu > 0, is aparticular isotropic system. Moreover, because of the Cauchy theorem (6.3),pu is independent of u: pu = p (pressure). Equivalently, we have
Yik = pδk
i , (6.46)
which is a particular case of (6.44).
6.4 Symbolic Relation of Continuum Mechanics
With (6.33) one must associate the boundary conditions on ∂C, which give thelocal identity between the surface force f and the normal stress: YN = NiYi.We thus have the following system
⎧⎨⎩
V(P) ≡ μ(F− a)− 1√g∂i(√gYi) = 0 inC,
W(Q) ≡ f −NiYi = 0 in ∂C,(6.47)
which can be summarized by a single scalar relation: the symbolic relation ofthe continuum systems.
Let us consider an arbitrary vector function ξ(P), defined on C + ∂C, andhaving a regularity class Cn(i.e. a continuous function, with the partial deriva-tive also continuous up to the nth order); when V = 0 and W = 0 the integral
I[ξ] ≡∫
C
V · ξ dC +∫
∂C
W · ξ dΣ (6.48)
clearly vanishes for any choice of the function ξ: I[ξ] = 0. The converse isless trivial: if the integral (6.48) is zero for any choice of ξ, then V = 0 in Cand W = 0 in ∂C, simultaneously. To show this, let us assume that, for anychoice of ξ(P), it is I[ξ] = 0
∫C
V · ξ dC +∫
∂C
W · ξ dΣ = 0, ∀ ξ , (6.49)
but V is not identically zero; for instance, V 1 > 0 for a certain point P0 ∈C. Because of the continuity of V(P), there exists a neighbourhood of P0
belonging to C, say a sphere Sε(P0), with centre in P0 and radius ε, in whichV 1 > 0. Let us assume, then, for ξ(P), the following choice:

216 6 Elements of Classical Dynamics of a Continuum
ξ =
⎧⎨⎩
(ε2 − |P0P|2)n+1e1, ∀P ∈ Sε(P0),
0, ∀P �∈ Sε,
(6.50)
which satisfies the required regularity conditions.3 With such a choice of ξ,the second term of (6.49) vanishes, while the first reduces to
∫Sε
V 1(ε2 − |P0P|2)n+1 dC .
As V 1(ε2 − |P0P|2)n+1 > 0 in the whole of Sε, the above integral never van-ishes, contrary to the hypothesis. Hence (6.49) implies that V = 0 in Cnecessarily, and similarly one can show that W = 0 in ∂C.
We have thus proven the equivalence between the system (6.47) and thescalar relation (6.49) (first fundamental lemma of variational calculus).
Moreover, taking into account the expression (6.47) for V and W, thefunctional (6.48) can be written as
I[ξ] =∫
C
μ(F− a) · ξ dC −∫
C
1√g∂i(√gYi) · ξ dC +
∫∂C
(f −NiYi) · ξ dΣ ,
and, transforming the second integral by means of the divergence theorem,4
(6.49) assumes the following form (symbolic relation of continuum mechanics):∫
C
μ(F− a) · ξ dC +∫
C
Yi · ∂iξ +∫
∂C
f · ξ dΣ = 0 . (6.51)
Interpreting the vectorial function ξ(P) as a nominal velocity field over thepoints of C, the latter equation implies that at any instant, the full nomi-nal power of all the forces acting on the system: mass, inertial, internal andsurface, vanishes.
Using (6.51) one confirms the Lagrangian expression of the specific powerof the internal forces
w(i) = Yi · ∂iv . (6.52)
Clearly, if one pulls back the stresses Yi to the reference configuration C∗ anduses the decomposition with respect to the basis {e∗i } corresponding to {ei}5then one finds
Yi = χike∗k , (6.53)
where the vectors e∗k do not depend on time and the coefficients χik aretermed Piola–Kirchhoff characteristics. They are nonsymmetric and relatedby the condition3 ξ, as defined by (6.50), is Cn in C + ∂C.4 The product Yi · ξ, under a Lagrangian coordinate change, transforms as the
components of a contravariant vector.5 The bijective mapping C ↔ C∗ induces a pointlike correspondence, which is
naturally extended to the associated vectors as well as tensors.

6.5 Reversible Transformation Systems. Free Energy 217
χike∗i × ek = 0 . (6.54)
Equation (6.38) becomes
w(i) = χike∗k · ∂iv = χik(kij + ωij) e∗k · ej . (6.55)
and the angular velocity ωij now appears.
6.5 Reversible Transformation Systems. Free Energy
A continuous system is said to undergo a reversible transformation if, besidesthe internal energy ε, it admits a second characteristic function: the entropyS, additive as well and expressible by the specific entropy s,
S =∫
C
μs dC ; (6.56)
such a function is defined so that for each transformation of the system, andusing the absolute temperature scale, the ratio between the thermal power qand the temperature θ coincides with the temporal derivative of the function s:
q
θ=
dsdt
. (6.57)
Clearly, the specific entropy, like the internal energy, is defined up to an addi-tive constant, and its form is suggested by the physical properties of the ma-terial body schematized by the continuum. Again, like ε, s should be thoughtof as a function of the state parameters, say η1, η2,..., besides the Lagrangiancoordinates yi and time.
From an analytic point of view, the reversible transformation systems arecharacterized by the property that the ratio (q/θ)dt is an exact 1-form; thatis, for each closed cycle and for each element of the continuum6:
∮q
θdt = 0 .
For irreversible transformations instead, this integral is negative, because ofthe second law of thermodynamics.7
6 That is, any transformation which, starting from a certain state, takes the systemagain to the same state.
7 The specific entropy can also be defined for general thermodynamical systemsbut in place of (6.57) one has the restriction
ds
dt≥ q
θ,
where the equality holds for reversible transformations only.

218 6 Elements of Classical Dynamics of a Continuum
The property (6.57) identifies a class of continuous systems which, in asense, correspond, in the context of thermomechanical phenomena, to theholonomic frictionless systems of analytical mechanics. The latter are charac-terized by a Lagrangian function (in the case of conservative forces),8 whereasthe reversible transformation systems are characterized by the thermodynam-ical potential, or free energy:
F def= ε− sθ . (6.58)
When the function F is known, at least for isothermal or adiabatic trans-formations, one gets the same number of equations and unknowns for theevolutionary problem. In fact, from the definition (6.58) and using (6.57), foreach transformation of the system one has
dFdt
=dεdt− ds
dtθ − sdθ
dt=
dεdt− q − sdθ
dt,
and the first law of thermodynamics gives rise to the following condition:
dFdt
= − 1μw(i) − sdθ
dt. (6.59)
Using then the Lagrangian characteristics of tension (introduced in (6.40)) toexpress w(i) we have
dF = − 12μY ikdgik − sdθ . (6.60)
Thus the thermodynamical potential F can only depend on the metric gik ofthe actual configuration and on the temperature θ, besides on the Lagrangiancoordinates yi:
F = F(y, gik, θ) , (6.61)
or on equivalent variables. For instance, once the reference configuration C∗is fixed (dg∗ik = 0), the metric gik can be replaced by the deformation char-acteristics:
F = F(y, ε∗ik, θ) . (6.62)
Equation (6.60) then becomes
dF = − 1μY ikdε∗ik − sdθ , (6.63)
leading to the conditions
Y ik = −μ ∂F∂ε∗ik
, s = −∂F∂θ
, (i, k = 1, 2, 3) . (6.64)
Hence, once the thermodynamical potential is assigned, (6.64)1 gives six moreequations to be added to the four equations of (6.49), yielding, at least for8 In the case of nonconservative forces one must think of the kinetic energy function.

6.5 Reversible Transformation Systems. Free Energy 219
isothermal transformations (θ = const.), the same number of equations asunknowns. Equation (6.64)2 can then be used to determine the entropy s as afunction of the deformation characteristics, the temperature and the internalenergy ε, as follows from (6.58) and using (6.64):
ε = F − θ ∂F∂θ
. (6.65)
For reversible transformation systems the same number of equations andunknowns is also obtained in the adiabatic case q = 0, i.e. s = const. from(6.57)1. To show this, let us start by noting that the Helmholtz postulate9
implies that
∂2F∂θ2
< 0 ; (6.66)
(6.64)2 can thus be solved with respect to θ: θ = θ(y, ε, s), and the internal en-ergy can be expressed, using (6.68), in terms of the deformation characteristicsand entropy:
ε = ε(y, ε∗, s) . (6.67)
Moreover, for reversible transformation systems, the first law of thermody-namics (6.19) gives the following expression for dε:
dε = − 12μY ik dgik + θ ds ≡ − 1
μY ik dεik + θ ds ,
so thatY ik = −μ ∂ε
∂ε∗ik, θ =
∂ε
∂s, (i, k = 1, 2, 3) . (6.68)
It is easy to see that, when s = const., (6.68)1 gives six relations betweenstress and deformation, which is what is needed to get the same number ofequations as unknowns. Equation (6.68)2 gives instead the absolute temper-ature in terms of deformation characteristics and the entropy, determining inturn the thermodynamical potential (6.58)
F ≡ ε− sθ = ε− s ∂ε∂s
. (6.69)
We note that (6.68)2 is equivalent to (6.64)2 once the latter is solved withrespect to θ. It can also be solved with respect to the entropy s. In fact, fromthe identity
−∂F∂θ
∣∣∣∣θ=∂ε/∂s
≡ s ,
9 This postulate is usually expressed as follows: the specific heat at constant volume,cv, must always be positive (see [4], p. 110). It is also equivalent to the condition,following from (6.65), that the internal energy ε is an increasing function of the
absolute temperature θ > 0:∂ε
∂θ= −θ
∂2F∂θ2
> 0.

220 6 Elements of Classical Dynamics of a Continuum
after differentiating with respect to s one gets
−∂2F∂θ2
∣∣∣∣θ=∂ε/∂s
∂2ε
∂s2≡ 1 ;
hence, because of (6.66), the energy must satisfy the restriction
∂2ε
∂s2> 0 , (6.70)
which ensures the solvability of (6.68)2 with respect to s.So, at least for isothermal or adiabatic transformations, the thermodynam-
ical potential (directly, or indirectly through the energy) allows a correct for-mulation of the dynamical problem.10 However, the problem of determiningthe characteristic function F still remains.
Without developing a systematic treatise of thermomechanics, we will herelimit ourselves to show how, in certain concrete situations, the experience cansuggest the choice of the thermodynamical potential as well as the stress–deformation relations, which, in turn, give rise to the constitutive equationsfor the material system under consideration.
6.6 Perfect Fluids. Characteristic Equationand Specific Heat
A perfect fluid is a nonviscous fluid undergoing reversible transformations andwithout internal constraints; this definition excludes the case of perfect liquids,which are nonviscous fluids satisfying also the incompressibility constraint:D = 1. For a perfect fluid, together with (6.46): Y ik = pgik (i, k = 1, 2, 3), wehave (6.63); then taking into account the identity
1D∂tD =
12gik∂tgik , (6.71)
(6.60) still holds in the form
dF = − p
μDdD − sdθ . (6.72)
It follows that the thermodynamical potential will depend on the metric gik
only through the invariant D ≡ √g, or the actual density:
10 For reversible transformations which are not isothermal or adiabatic, the knowl-edge of the thermodynamical potential is not sufficient to give an equal numberof equations and unknowns: it is thus necessary to use other equations, e.g. theheat equation.

6.6 Perfect Fluids. Characteristic Equation and Specific Heat 221
μ =μ∗D . (6.73)
One then hasF = F(μ, θ) , (6.74)
and from (6.72) and (6.73),
dF =p
μ2dμ− s dθ .
Hencep = μ2 ∂F
∂μ, s = −∂F
∂θ. (6.75)
Equation (6.75)1 shows that for a perfect fluid there exists a well-determinedrelation between pressure, density and temperature (characteristic equationof the fluid):
p = f(μ, θ) , fdef= μ2 ∂F
∂μ. (6.76)
Knowing f (often from experience) allows one to add to (6.42) and (6.46) onemore relation, which is enough (at least for isothermal transformations) tomake the dynamical problem determined.11 However, from (6.76), it followsthat the function f alone is not sufficient to fully determine the thermody-namical potential, but only up to an arbitrary function of the temperature; forF , instead, the definition (6.58) allows its determination only up to a linearfunction of θ.12
The function f is often deduced integrating the specific heat at constantvolume; in fact, since q is the heat absorbed per unit time, the specific heatis given by
cdef= q
dtdθ
. (6.77)
In particular, for reversible transformation systems, because of (6.57), one hasq = θ ds/dt, so that (6.77) becomes
c = θdsdθ
. (6.78)
Introducing now the free energy from (6.64)2, one finds
c = −θ ddθ
(∂F∂θ
)= −θ
(∂2F∂θ2
+∂2F
∂ε∗ik∂θ
dε∗ik
dθ
). (6.79)
11 One should think of the Eulerian case; the Lagrangian formulation, as alreadynoted, implies the presence of another quantity: the metric gik.
12 This is a consequence of the fact that both the internal energy and the entropyare defined up to an additive constant.

222 6 Elements of Classical Dynamics of a Continuum
If the transformation is not generic, but leaves the metric unchanged: dε∗ik =0, one then gets the specific heat at constant volume:
cv = −θ∂2F∂θ2
> 0 , (6.80)
or because of (6.65):
cv =∂ε
∂θ> 0 . (6.81)
From (6.76) and (6.80) it is clear that, at least for perfect fluids, the knowl-edge of the two functions, f and cv (both depending on μ and θ), is equivalentto that of the free energy defined up to a linear function of the temperature.
6.7 Perfect Gas
Among perfect fluids, perfect gases are characterized by the following condi-tions:
1. the product of pressure and specific volume13 is a function of temperatureonly:
pV = g(θ) > 0 ∼ p = μg(θ) ; (6.82)
2. the internal energy ε is independent of the density:
ε = ε(θ) . (6.83)
Under these hypotheses (6.75)1 becomes ∂F/∂μ = g(θ)/μ, which, after inte-gration with respect to μ, yields
F = g(θ) logμ+ h(θ) , (6.84)
where h is an arbitrary function of temperature. For the internal energy ε,besides (6.84), one has the expression
ε = F − θ∂F∂θ
=(g − θdg
dθ
)logμ+ h− θdh
dθ, (6.85)
compatible with (6.83) only if
g − θdgdθ
= 0 ∼ ddθ
(gθ
)= 0
org = Rθ , (6.86)
with R a positive constant. Thus, for a perfect gas the characteristic equa-tion is13 That is, the volume per unit mass in the actual configuration V = 1/μ.

6.7 Perfect Gas 223
p = f(μ, θ) = Rθμ , (6.87)
while the thermodynamical potential is determined up to an arbitrary functionof the temperature:
F = Rθ logμ+ h(θ) . (6.88)
To obtain the function h(θ) it is sufficient to know the specific heat at constantvolume cv or pressure cp. In fact, for a perfect fluid (6.79) reduces to the form:
c = −θ(∂2F∂θ2
+∂2F∂μ∂θ
dμdθ
);
moreover, for constant pressure transformations, that is, for f(μ, θ) = const.,we have
∂f
∂θ+∂f
∂μ
dμ
dθ= 0 ,
and one has the following invertible relation between constant volume-andconstant pressure-specific heats:
cp = cv + θ∂2F∂μ∂θ
∂f
∂θ∂f
∂μ
. (6.89)
By using (6.87) and (6.88), in the case of a perfect gas one sees that the specificheats differ by a constant:
cp = cv +R . (6.90)
As a consequence of (6.69) and (6.88) cv is given by
cv = −θd2h
dθ2. (6.91)
If cv is assigned, (6.91) specifies h(θ) and hence F from (6.88), up to a linearfunction of temperature. For instance, if cv = const., we have h = −cvθ log θ,and from (6.88)
F = θ(R log μ− cv log θ) . (6.92)
The energy ε and the entropy s are then obtained from (6.81) and (6.75)2,respectively:
ε = cvθ , s = R logμ− cv log θ = log(μR
θcv
). (6.93)
Expressing temperature by means of the entropy, it follows that
θ = μR/cv e−s/cv ; (6.94)
(6.93)1 gives then the internal energy in terms of μ and s:

224 6 Elements of Classical Dynamics of a Continuum
ε = cvμR/cv e−s/cv . (6.95)
In the case of adiabatic transformations, introducing a new factor γ ≡ cp/cvand using (6.90), we have
γ ≡ cpcv
= 1 +R
cv> 1 . (6.96)
From (6.94) one then gets the relation
θ = Kμγ − 1 , K = e−s/cv = const. (6.97)
Thus, for adiabatic as well as isothermal transformations (6.77) reduces to adirect relation between pressure and density (reduced characteristic equation):
θp = cμγ , c = RK = const. (6.98)
6.8 General Expression for the Powerof the Internal Forces
We will pass now from nonviscous fluids to the more general case of isotropicsystems. For a generic system undergoing reversible transformations charac-terized by a thermodynamical potential F = F(y, ε, θ), how is the isotropicproperty represented in terms of F?
To answer this question, it is convenient to derive a general and intrinsicexpression for the work of the internal forces, which needs the choice, in C∗,of an arbitrary anholonomic system of triads; that is, a distribution of bases:λ(r) ≡ λi
(r), r, i = 1, 2, 3,14 generally dependent on P∗ as well as on time butwithout any other special meaning, for the moment. With the basis {λ(r)} isassociated the anholonomic metric in C∗:
g(r)(s) = λ(r) · λ(s) = g∗ikλi(r)λ
k(s) , (r, s = 1, 2, 3) , (6.99)
with its reciprocal g(r)(s) such that
g(r)(h)g(s)(h) = δs
r ∼ λ(r) · λ(s) = λ(r)i λi
(s) = δsr , (6.100)
where the cobasis vectors λ(r) ≡ (λ(r)i ) are given by
λ(r) = λ(s)g(r)(s) ∼ λ
(r)i = g(r)(s)λ(s)i ≡ g(r)(s)g∗ikλ
k(s) . (6.101)
Consider the stress and deformation tensor components along the anholonomicbasis introduced above, i.e. ε∗(r)(s) and Y (r)(s), respectively. We have thefollowing relations:14 In order to distinguish a tensorial index from an ordinal one we will denote the
latter with a parenthesis.

6.8 General Expression for the Power of the Internal Forces 225
ε∗ik = λ(r)i λ
(s)k ε∗(r)(s), Y ik = λ(h)iλ(u)kY(h)(u) , (6.102)
yielding, because of (6.40), the power of the internal forces:
w(i)δt ≡ Y ikδε∗ik = Y (r)(s)δε∗(r)(s) + 2ε∗(r)(s)Y(h)(s)λi
(h)δλ(r)i , (6.103)
where δ = dt ∂t; using then the identity
λi(h)δλ
(r)i ≡ δ(λi
(h)λ(r)i )− λ(r)
i δλi(h) = −λ(r)
i δλi(h) ,
leads to
w(i)δt = Y (r)(s)δε∗(r)(s) − 2ε∗(r)(s)Y(h)(s)λ
(r)i δλi
(h) . (6.104)
Consider next the product λ(k)iδλi(h) and specify its symmetric and antisym-
metric parts:
λ(k)iδλi(h) =
12(λ(k)iδλ
i(h) + λ(h)iδλ
i(k)) +
12δω(k)(h) , (6.105)
whereδω(k)(h) ≡ λ(k)iδλ
i(h) − λ(h)iδλ
i(k) . (6.106)
The reference metric g∗ik is constant with respect to the differentiation δ;from (6.99) the symmetric part can thus be written as
λ(k)iδλi(h) + λ(h)iδλ
i(k) = λ(k)
iδλ(h)i + λ(h)iδλ(k)i ≡ δ(λi
(k)λ(h)i) = δg(k)(h) ,
and (6.105) becomes
λ(k)iδλi(h) =
12(δg(k)(h) + δω(k)(h)), (h, k = 1, 2, 3) . (6.107)
Therefore, taking into account (6.101), (6.104) assumes the form:
w(i)δt = Y (r)(s)δε∗(r)(s) − ε∗(r)(s)Y(h)(s)g(r)(k)(δg(k)(h) + δω(k)(h)) . (6.108)
An alternative form to (6.108) is obtained by considering the covariantexpressions of the stresses in C:
Yikdef= gijgklY
jl ∼ Y ik = gijgklYjl , (6.109)
as well as the deformation tensor εik∗ :
εik∗def=
12(gik − gik
∗ ) . (6.110)
Hence, from (6.38)
w(i)δt =12gijgklYjlδgik = −1
2gijgikYjlδg
kl = −12δjkYjlδg
kl ,

226 6 Elements of Classical Dynamics of a Continuum
we get the following form for the power of the internal forces:
w(i)δt = −12Yikδg
ik ≡ −Yikδεik∗ . (6.111)
Using now the components along the anholonomic basis {λ(r)} leads to
−w(i)δt = Y(r)(s)δε(r)(s)∗ + 2ε(r)(s)
∗ Y(h)(s)λ(h)i δλi
(r) ,
and thus using (6.107)
− w(i)δt = Y(r)(s)δε(r)(s)∗ + ε
(r)(s)∗ Y(h)(s)g
(h)(k)(δg(k)(r) + δω(k)(r)) . (6.112)
The expressions (6.108) and (6.112) for the power of the internal forces arequite general, i.e. they do not require any particular choice of the anholonomicframe {λ(r)}. They are clearly simplified if the frame is further specified, forinstance, by requiring that, for any t, the {λ(r)} form an orthonormal triad:δg(k)(r) = 0. In the following we will explicitly consider this case, with {λ(r)}coinciding with the principal deformation triad.
By using the exterior product, (6.106) can be written as
δω =12λ(r) × δλ(r) =
12λ(r) × δλ(r) (6.113)
or, equivalently,
δω = −14δω(r)(s)λ
(r) × λ(s) ; (6.114)
(6.114) explains the kinematical meaning of the antisymmetric quantities(6.106) [5]. In fact, we have
λ(r) = λi(r)e
∗i ∼ e∗i = λ(s)iλ
(s) , (6.115)
so that from (6.113) and using the property δe∗i = 0
δω ≡ 12λ(r) × (δλi
(r)e∗i + λi
(r)δe∗i ) =
12λ(r) × λ(s)λ(s)iδλ
i(r),
or, from (6.107),
δω =14λ(r) × λ(s)(δg(s)(r) + δω(s)(r)) =
14λ(r) × λ(s)δω(s)(r) ,
which completes the proof.
6.9 Isotropic Systems: Constitutive Equations
For a system undergoing reversible transformations, the isotropic condition isequivalent to the hypothesis that the thermodynamical potential depends on

6.9 Isotropic Systems: Constitutive Equations 227
the deformation characteristics ε∗ik only, through the associated invariantsIk (k = 1, 2, 3), with respect to the reference metric or the equivalent scalars:
L = gik∗ ε∗ik , Q = gir
∗ gks∗ ε∗ikε∗rs , C = gir
∗ gls∗ g
km∗ ε∗ikε∗rsε∗lm . (6.116)
The isotropic property follows immediately if
F = F(L,Q, C) , (6.117)
(the dependence on the temperature being implicit). The hypothesis that asystem undergoes reversible transformations can be cast, from (6.64)1 and(6.116), into the following six equalities:
− 1μY ik =
∂F∂L
gik∗ + 2
∂F∂Q
gir∗ g
ks∗ ε∗rs + 3
∂F∂C g
ir∗ g
ls∗ g
km∗ ε∗rsε∗lm . (6.118)
Thus, any principal direction λ(k) of the deformation tensor (with respectto the metric g∗ik), ε∗ikλ
(k) = Eg∗ikλ(k), is also a principal direction of
the tension tensor: Y ikλ(k) = Bgik∗ λ(k); one then finds the following relation
among the corresponding eigenvalues:
− 1μB =
∂F∂L
+ 2∂F∂Q
E + 3∂F∂C E
2 . (6.119)
Thus the deformation and tension tensors admit the same eigenvectors.Conversely, let us assume that the triad {λ(r)} (r = 1, 2, 3) of the eigendi-
rections of ε∗ik (with respect to g∗ik) is also an eigentriad for the tensor Y ik.We can show that using the relation
− 1μY ikδε∗ik = δF(ε) , (6.120)
which is valid for any variation of the εik starting from C∗, there follows adependence on the ε∗ik as in (6.117). To see this, let us specialize the an-holonomic frame {λ(r)} (r = 1, 2, 3) in (6.109) to coincide (locally) with theprincipal deformation triad. This implies the simultaneous reduction of thethree tensors ε∗ik, Y ik and g∗ik to the diagonal form:
ε∗(r)(s) = E(r)δrs, Y (r)(s) = B(r)δrs , g(r)(s) = δrs , (6.121)
with E(r) and B(r) the principal tension and deformation characteristics, re-spectively. Then, from (6.108), and the antisymmetry of the tensor δω(r)(s),we have
w(i)δt = B(r)δE(r) − ε∗(r)(s)B(s)δ(h)(s)δ(k)(r)δω(h)(k) = B(r)δE(r) . (6.122)
This equation, in turn, specifies the thermodynamical potential using (6.59),namely

228 6 Elements of Classical Dynamics of a Continuum
dF = − 1μw(i)dt− sdθ ,
in the sense that, as follows from (6.120), F reduces to a differential form inthe three variables, E(r), apart from the dependence on θ:
δF(ε) = − 1μB(r)δE(r) ; (6.123)
that is, δF(ε) is necessarily of the form (6.117).15
For a system undergoing reversible transformations, the free energy (apartfrom its dependence on the temperature) can be regarded either as a functionof the (direct) deformation characteristics, ε∗ik, or of the equivalent (inversecharacteristics) εik∗
def= (gik − gik∗ )/2. If F(ε∗) denotes the thermodynamicalpotential expressed in terms of the variables εik∗ , the isotropic property isequivalent to the hypothesis that F(ε∗) depends on εik∗ only through the in-variants Ik (k = 1, 2, 3) or the equivalent scalars
L ≡ g∗ikεik∗ , Q = g∗irg∗ksε
ik∗ ε
rs∗ , C ≡ g∗irg∗lsg∗kmε
ik∗ ε
rs∗ ε
lm∗ . (6.124)
In this case the following equations correspond to (6.118):
1μYik =
∂F∂L
g∗ik + 2∂F∂Q
g∗irg∗ksεrs∗ + 3
∂F∂C g∗irg∗lsg∗kmε
rs∗ ε
lm∗ , (6.125)
and the eigenvalues satisfy the relations
1μB =
∂F∂L
+ 2∂F∂Q
E + 3∂F∂C E
2 . (6.126)
For isotropic systems—even if the fundamental variables are reduced tothree—there remains the fundamental problem of the choice of the free energy(6.117): the quadratic relations (6.118)–(6.125) between stress and deforma-tion can only be used to suggest hypotheses for it. For instance, after a suitablechoice of the reference configuration, the constitutive equations (6.125) couldbe selected as linear and homogeneous functions
∂F∂L
= λL ,∂F∂Q
= μ ,∂F∂C = 0 ,
with λ and μ (Lame constants) independent of the characteristics εik∗ .Equation (6.118), as well as the equivalent (6.125), express the stresses in
terms of deformations and they are a special example of constitutive equations,being characterized by the thermodynamical potential F of the continuoussystem. In turn, denoting by s the displacement P∗P, one has
ei = e∗i + ∂is, gik = ei · ek, (6.127)15 The principal deformation characteristics are functions of the invariants (6.116).

6.10 Dynamical Compatibility of a Continuum 229
and the deformation characteristics assume the form
εik =12(∂is · e∗k + ∂ks · e∗i + ∂is · ∂ks) , (6.128)
that is, they can be expressed in terms of s, a variable which can replace thevelocity: v = ∂ts.
Hence, the constitutive relations (6.118) solve the dynamical problem, be-cause they give the tensions in terms of displacement and, then, allow oneto obtain, in the fundamental system (6.43), the same number of equationsas unknowns, also taking into account the covariant derivative ∇i associatedwith the metric gik = g∗ik + 2εik.
In the case considered above, up to an arbitrary function of the temperature,the potential is of the form
F =12(λL2 + 2μQ) , (6.129)
which is physically meaningful, at least for elastic systems, in the case ofinfinitesimal deformations: ε∗ik ∼ −εik. This is, instead, in contrast withthe nonlinear elasticity theory, grounded on the hypothesis that the relations(6.125) are quadratic [5], which we will not consider here. We prefer to discussanother, intrinsic, formulation of the Lagrangian mechanics of continuoussystems, which has a geometrical–kinematical counterpart, both in specialand general relativities.
6.10 Dynamical Compatibility of a Continuum
The ordinary formulations of continuum mechanics are generally expressedin terms of displacement components and assume the choice of a referenceconfiguration; that is just the point of view used in Sect. 6.9 for an isotropicsystem undergoing reversible transformations.
We are now going to consider a different point of view which uses as fun-damental unknowns the metric, the deformation velocity and the angularvelocity, that is, all variables associated with the actual configuration. This isa dynamical formulation which, endowed with proper initial data, ensures thecompatibility of the evolutionary problem and, in particular, the Euclideanproperty for the metric.
More precisely such a formulation is of intrinsic type, both for the mean-ing of the variables involved and the choice of the local reference frame, de-rived from the continuum itself through the Lagrangian variables which areat disposal; in addition one must consider the precise geometrical–kinematicalmeaning of the chosen variables and their tensorial properties.
Finally, apart from the choice of the initial data, no longer free but withinvolutive constraints (in the sense of Cartan), the determination of the motion

230 6 Elements of Classical Dynamics of a Continuum
of the continuum implies the possibility to integrate a well-determined (first-order) Cauchy problem; this is the main problem to which the secondaryvariables, determined a posteriori by quadratures, are subordinated.
After this short introduction, let us consider in the Newtonian context acontinuum C in regular motion with respect to a fixed Galilean frame Rg. Let{yi} (i = 1, 2, 3) be an arbitrary set of Lagrangian coordinates, defined up toan invertible transformation
det∣∣∣∣∣∣∣∣ ∂y
i
∂yi′
∣∣∣∣∣∣∣∣ > 0, (6.130)
and let C be the instantaneous configuration of the continuum
OP = OP(t, y) ∼ xi = xi(t, y) , (6.131)
where xi (i = 1, 2, 3) are (global) Cartesian coordinates. Let {ei} be the natu-ral basis, locally associated at P ∈ C with the chosen Lagrangian coordinates,and {ei} the cobasis, defined by the conditions ei · ek = δi
k. Finally, let g bethe Lagrangian metric:
gik = ei · ek ∼ gik =∂xr
∂yi
∂xs
∂ykδrs , (i, k = 1, 2, 3) . (6.132)
From the kinematical point of view, the motion of the continuum is determinedby the vectorial function (6.131), and it can be reduced to the integration ofthe following differential system:
∂iek = Γjikej , ∂tei = ∂iv = hi
kek, ∂tv = a , (6.133)
in the four vectorial unknowns: ei (i = 1, 2, 3) and v which are functions of thevariables yi and t. The coefficients on the right-hand side of (6.133) all havea geometrical–kinematical meaning and depend on yi and t: the second-typeChristoffel symbols, already defined,
Γjik =
12ghj(∂ighk + ∂kghi − ∂hgik) , (6.134)
and the tensor hik, summarizing the deformation velocity kik and the angularvelocity ωik of the continuum:
hik = kik + ωik , (6.135)
being
kikdef=
12∂tgik , ωik
def= ω · ei × ek, ωdef=
12ei × ∂tei . (6.136)
Finally, v = ∂t OP and a = ∂tv denote the Lagrangian velocity and accel-eration of the generic element of the continuum; the latter, even if with a

6.10 Dynamical Compatibility of a Continuum 231
different role, completes the previous coefficients, so that at the right-handside of (6.133) appear the characteristics hik and ai as well as the metric gik,through the Christoffel symbols. To ensure the compatibility of the systemitself, such coefficients cannot be chosen freely; in fact, they must satisfy thefollowing differential (necessary and sufficient) conditions:
Rikhj = 0 , Aik
h = 0 , ∂thik = ∇iak + hijhkj , (6.137)
where Rikhj is the curvature tensor associated with the metric gik:
Rikhj def= ∂kΓj
ih − ∂iΓjkh + Γl
ihΓjkl − Γl
khΓjil , (6.138)
while Aikh is related to the gradient of hik:
Aikhdef= ∇iωkh −∇kkhi +∇hkik , (6.139)
with ∇i being the covariant derivative.The compatibility conditions of the system (6.133) can then be summarized
in three groups of equations, corresponding to (6.137).The first condition has a purely geometrical meaning, i.e. it concerns the
metric only (and its first- and second-order derivatives), present through theChristoffel symbols; it is equivalent to six equations (congruence conditions),which imply, at each instant, the actual configuration C of the continuum,endowed with an Euclidean flat metric.
Condition (6.137)2, instead, has a geometrical–kinematical meaning, be-cause it contains the metric (through the covariant derivative) as well as thedeformation and angular velocities.
Finally, (6.137)3 has an evolutive meaning for the tensor hik, and it is theonly equation containing the acceleration ai.
The system (6.137) gives rise to a first-order Cauchy problem, in the vari-ables gik and hik:
∂tgik = 2h(ik) , ∂thik = ∇iak + hijhkj ; (6.140)
these variables are subjected to the constraints
Rikhj = 0 , Aik
h = 0 , (6.141)
which must be satisfied at each instant and, in particular, initially. The con-straints (6.141) are involutory, in the sense of Cartan. In fact, from (6.141)(and the Bianchi identities, see e.g. [4]), it follows that the two tensorial fieldsRikh
j and Aikh must satisfy the following linear homogeneous first-order dif-
ferential equations:⎧⎨⎩∂tAikh = Rkhi
jaj + 2h[kjAh]ij − 2hi
jA[kh]j ,
∂tRikhj = −Rikh
lhlj +Rikl
jhhl − 2∇[iAk]h
j ,(6.142)

232 6 Elements of Classical Dynamics of a Continuum
whose coefficients contain the characteristics of the continuum ai and hik,besides the Christoffel symbols, through ∇i.
To show this, let us start by noting that the definitions (6.134) and (6.138)imply the identities
∂tΓjik = Hik
j , ∂tRikhj = ∇iHkh
j −∇kHihj , (6.143)
whereHik,j
def= ∇ikkj +∇kkji −∇jkik (6.144)
is symmetric with respect to the first pair of indices and depends on thedeformation tensor and the metric. In turn, antisymmetrizing (6.140)2, wehave ∂tωik = ∇[iak] and, after covariantly differentiating both sides,
∂t∇hωik = ∇h∇[iak] + 2Hh[ijωk]j ; (6.145)
similarly, for the symmetric part ∂tkik = ∇(iak) +hijhkj , taking into account
(6.144), one gets
∂t(∇hωik −∇ikkh +∇kkih) = ∇h∇[iak] −∇i∇(kah) +∇k∇(iah)
+2Hh[ijωk]j − 2K[ik]jhkj − 2ghlK
lj[i hk]j ,
whereKhik
def= ∇hhik , (6.146)
so thatAhik = Khik −Hhik . (6.147)
Using now the Ricci theorem (see e.g. [4])
∇i∇kah = ∇k∇iah +Rikjhaj , (6.148)
as well as the antisymmetric properties
A[hi]k = K[hi]k , R[hik]j = 0 , (6.149)
one immediately obtains (after differentiation) (6.142)1. To this linear andhomogeneous relation between the tensors ∂tA, A and R there correspondsan analogous relation between ∂tR, A and R, as a differential consequence of(6.140)1. In fact, (6.146) and (6.147) imply∇jHikh = ∇j∇ihhk−∇jAikh, fromwhich, by antisymmetrizing over the first pair of indices and using (6.148), wehave
2∇[jHi]kh = Rjilkhlh +Rji
lhhkl − 2∇[jAi]kh .
This confirms (6.142)2 and concludes the proof.The linearity and homogeneity of the system (6.142) implies the involutive
structure of the constraints (6.141), in the sense that, because of (6.140), thetensorsAihk andRijk
h vanish at any instant, if they are initially null. It followsthat the compatibility conditions of the system (6.133), that is, (6.137), are

6.10 Dynamical Compatibility of a Continuum 233
equivalent to the Cauchy problem (6.140), if the initial data gik,0 and hik,0
satisfy the constraints (6.141) at t = 0, i.e. in C|t=0.Apart from the (differential) restrictions on the initial data, the problem of
determining the motion of the continuum is thus reduced to the integrationof the Cauchy problem (6.140), which, however, requires the knowledge of theacceleration field ai; this is in agreement with the Galilei principle, for thepriority of the acceleration in the formulation of the mechanical laws. Apartfrom this specification, which we will investigate later, the formulation (6.140)represents an evolutionary scheme made up by a first-order Cauchy problemwith involutive constraints, naturally giving restrictions to the initial data.
In the case of a continuum, besides the constraint (6.141)1 which concernsthe initial metric only, gik,0, the angular and deformation velocities mustsatisfy the conditions (6.141)2
∇iωkh = ∇kkhi −∇hkki . (6.150)
This is a total differential system for ωik, such that the initial angular velocityω0(y) is determined, up to a constant, from the initial deformation velocitykik,0; the latter must then satisfy the congruence conditions
∇j(∇kkhi −∇hkki)−∇i(∇kkhj −∇hkkj) = 0 . (6.151)
So one has an evolutionary scheme, independent of the choice of the Galileanframe Rg, because the involved variables gik, hik and ai have an intrinsicmeaning. Such a scheme is invariant with respect to the choice of the La-grangian coordinates and unaffected by transformations like
t′ = t , yi = yi(y′) . (6.152)
Obviously, in Cartesian coordinates, the metric reduces to the Kronecker ten-sor δk
i , and the covariant derivative ∇i reduces to the partial one ∂i. However,the Cauchy problem still has the same structure, with the acceleration lawassumed to be known, in agreement with the so-called restricted problem:
ai = ai(t, yj , gik, hkj) . (6.153)
The acceleration plays the role of a dynamical parameter, in the sense that thespecification of the function (6.153) is related to three groups of equations:Cauchy, continuity and constitutive equations. Clearly, the analytic structureof the system (6.140) and (6.141) (Cauchy problem plus constraints for theinitial data) remains unchanged, apart from the addition of new dynamicalvariables. Similarly, the congruence conditions (6.150) and the differentialconsequence (6.151) remain unchanged.
We will consider the complete dynamical picture later, when studying therelativistic case, which is more transparent and more compact.

234 6 Elements of Classical Dynamics of a Continuum
6.11 Hyperelastic Continua: Intrinsic Dynamics
In the Cauchy problem (6.140) the acceleration enters into the second group ofequations only through its gradient∇iak; as a concrete and sufficiently generalexample we will consider the case of a hyperelastic continuum undergoingisothermal or adiabatic transformations, without internal constraints.
The dynamics of such a continuum is governed by the Cauchy and continuityequations (see (6.42))
μ(F− a)− 1√g∂i(√gYi) = 0 , ∂t(μ
√g) = 0 , (6.154)
with g = det||gik||, as well as by the constitutive equations (characteristic ofthe material), which in the present case are expressed in terms of a singlescalar function depending on six variables: the isothermal or adiabatic ther-modynamical potential W . In the context of finite deformations, (6.154) areusually written in the Kirchhoff scalar form, obtained by projecting them ontoa fixed triad in the reference configuration C∗, and hence invariant or not, ac-cording to the choice of the coordinates yi in C∗, Cartesian or curvilinear. Asconcerns the constitutive relations, such a formulation—which requires theintroduction of the Piola–Kirchhoff (nonsymmetric) tensor—also requires thedefinition of a potential function V , built up from W but depending on ninevariables instead of six (like W ).
Another point of view, directly related to the “moving frame” of stereo-dynamics (Euler equations, principal and secondary problem), is based onthe scalar equation (6.35), obtained from (6.154)1 after projection on the ba-sis {ei}:
μ(F i − ai)−∇kYik = 0 , (i = 1, 2, 3) . (6.155)
These are “intrinsic” Lagrangian equations, in the sense that they are referredto a triad {ei}, moving with the generic particle of the continuum and henceunknown. This triad is defined up to transformations like
ei =∂yi′
∂yiei′ , (6.156)
which do not exclude that ei may be anholonomic. Thus, (6.155) are not equiv-alent to (6.154)1, because they presuppose the knowledge of the vectorial func-tions ei(t, y); hence, one is motivated to study their geometrical–kinematicalcompatibility, as we have done in the previous section.
However, by using the Lagrangian stress tensor Y ik and the metric gik
instead of the deformation εik, 16 the constitutive equations, because of (6.64)and (6.68), can be written in the following form:
16 Or the Eulerian one: Xrs =∂xr
∂yi
∂xs
∂ykY ik, with xr the Cartesian coordinates of P.

6.12 Cauchy Problem 235
Y ik = −2μ∂W
∂gik, (i, k = 1, 2, 3) , (6.157)
with W depending, as concerns the actual configuration, on yi and gik: W =W (y, g). One always assumes the symmetric condition
∂W
∂gik=∂W
∂gki, i �= k ,
which is equivalent to requiring that W depends on six variables only: g1 =g11, g2 = g22, g3 = g33, g4 = 2g23, g5 = 2g31, g6 = 2g12.
The continuity equation (6.154)2, in turn, is equivalent to the scalar condi-tion
μ = μ∗√g∗/g , (6.158)
which gives the mass density in C in terms of the actual metric, starting fromthe initial data: μ∗ and g∗ = det||g∗ik||.
Finally, using the identity
Γkik =
1√g∂i(√g) , (6.159)
the constitutive relations (6.157) and (6.158) reduce (6.155) to the form
ai = F i + 2∂W
∂gik
(∂kμ∗μ∗
+ Γk
)+ 2∇k
(∂W
∂gik
), (6.160)
whereΓk
def= ∗Γiik − Γi
ik . (6.161)
6.12 Cauchy Problem
Equation (6.160) allows one to give an explicit form for the first-order differ-ential system (6.140) in the variables gik, kik and ωik, at least in the case ofhyperelastic continuous systems:
⎧⎪⎪⎪⎨⎪⎪⎪⎩
∂tgik = 2kik,
∂tkik = ∇(iak) + (kil + ωi
l)(kkl + ωkl),
∂tωik = ∇[iak].
(6.162)
First of all, one must introduce on the right-hand side of (6.162) the accel-eration gradient in terms of the fundamental variables, taking into accountthat, by (6.153), it has the form

236 6 Elements of Classical Dynamics of a Continuum
∇iak = ∇iFk + 2Wkl
[1μ∗∇i(∂lμ∗)−
1μ2∗∂iμ∗∂lμ∗ +∇iΓl
]
+2∇i
(Wk
l)(∂lμ∗
μ∗+ Γl
)+ 2∇i∇lWk
l , (6.163)
where the (known) function Wkl:
Wkl def= ghk
∂W
∂ghl, (6.164)
depends, like W , only on the metric gik (and on the fixed Lagrangian param-eters). For the mass action, instead, the differential system is compatible witha general force law
F i = F i(t, y, g, h, ∂g) , (6.165)
which is a priori independent of the Lagrangian velocity vi; however, it is easyto see, from (6.43), that one can obtain a formulation similar to that of (6.47),in terms of gik and vi.
Under the hypothesis (6.165), (6.160) gives the components of the La-grangian acceleration ai in terms of the variables t, yi, gik, hik, and derivatives∂jhik and ∂ljgik.17
Thus, the dynamics of hyperelastic continua can be summarized in a well-determined first-order Cauchy problem for the variables gik, kik and ωik (allhaving a precise geometrical–kinematical meaning), represented by the system(6.162), with the following initial data: configuration C∗, density μ∗(y), metricg∗ik corresponding to the chosen coordinates yi, 18 deformation velocity k∗ik(y)and angular velocity ω∗
ik(y) satisfying in C∗ the constraints19 (6.149).The mass force F and the thermodynamical potential W enter the evolution
equations (6.162) through the gradient (6.163)20; thus, once the function Wis assigned, conditions (6.162) and the initial data ensure the geometrical–kinematical compatibility of the scheme.
Moreover, the normal form of the system (6.162) guarantees the uniquenessof the solution, at least in the analytic case (we are thinking of a series expan-sion in t of the solutions). Once the principal problem has solved in this way inorder to obtain the motion, one has to integrate the total differential system
17 One must consider the tensorial meaning of the difference between the Christoffelsymbols associated with two different metrics.
18 If the yi are Cartesian orthogonal coordinates, one has g∗ik = δik.19 We notice, once again, that (6.150)2 is equivalent to determining the angular
velocity ω∗(y), starting from k∗ik, if ω∗
ik are known at a point of C∗. This is astrong limitation, for the choice of the initial data, corresponding to the angularvelocity. In turn, the initial deformation velocity is subjected to the congruenceconditions (6.151).
20 The particular case of a perfect fluid presupposes a potential W = W (D) depend-
ing on the scalar D def=√
g/g∗, from which Y ik = pgik, being p = −μ∗W ′.

References 237
(6.133), starting from (6.118) and from the solution of the principal problem,thus obtaining the basis ei and configuration C (secondary problem).
The intrinsic form considered here can also be obtained in relativity (specialor general). In contrast, the approach in terms of displacement which we haveexamined, for instance, in the case of the hyperelastic continua, as in theisotropic case (but with general validity), can be framed in special relativity,but not in general relativity.
The system (6.162), which presupposes for the Cauchy data the choice ofthe configuration C∗, satisfies an important requirement: the invariance withrespect to the choice of Lagrangian coordinates; that is, (6.162) must havetensorial meaning with respect to transformations like (6.152), since in C∗there are no a priori preferred coordinates.
We will explore in the next chapter how the general picture of continuummechanics is modified in special relativity.
References
1. G. Ferrarese, Lezioni di meccanica razionale, Vol. II, Ed. Pitagora, Bologna(1980). 207
2. G. Ferrarese, Lezioni di meccanica superiore, Ed. Veschi, Roma (1968). 2073. T. Levi-Civita, Caratteristiche dei sistemi differenziali e propagazione ondosa,
Ed. Zanichelli, Bologna (1931). 2134. G. Ferrarese, Introduzione alla dinamica Riemanniana dei sistemi continui, Ed.
Pitagora, Bologna (1981). 214, 219, 231, 2325. A. Signorini, Trasformazioni termoelastiche finite, Mem. I, Ann. Mat. Pura Appl.
IV, 22, 33–143 (1943). 226, 229

7
Elements of Relativistic Dynamicsof a Continuum
7.1 Relativistic Extension
Let us focus now on continuous systems in the Minkowski space M4, assumedto be time-oriented. The admissible frames are not all the orthonormal framescα, (α = 0, 1, 2, 3):
cα · cβ = mαβ = diag(−1, 1, 1, 1) , (7.1)
but only those having the timelike vector c0 ∈ C+3 .
In the Galilean frame Sg, associated with the orthonormal frame cα, we setc0 = γ (γ ·γ = −1) to stress the different role played by c0 with respect to thespatial vectors ci (i = 1, 2, 3). In fact the three spatial vectors ci are definedup to an arbitrary spatial rotation R in the oriented 3-plane Σ, orthogonal toγ.
Also for a continuous system in the relativistic context one must distinguishbetween the absolute formulation of the dynamics and that relative to anarbitrary Galilean frame. The former is invariant under space-time translationsor rotations (Lorentz transformations); the latter is instead invariant undertime and space translations as well as spatial rotations.
From a physical point of view, the most significant formulation is the rela-tive formulation, which obeys the relativity principle and hence it is formallyinvariant with respect to the choice of the Galilean frame. Moreover, the in-variance is not substantial and we need to specify the transformation laws ofthe various kinematical quantities with respect to a change of the Galileanframe.
Let us start from the absolute point of view with the continuum representedby a congruence of ∞3 nonintersecting timelike lines, which fill a world tubeT ∈M4.
Together with the 4-velocity V at each point E ∈ T are also defined twopositive scalar quantities: the proper numerical density of particles 1/D0 (theproper volume element is proportional to D0, that is, dC/dC0 = 1/D0) andthe proper density of proper mass μ0(E).
G. Ferrarese and D. Bini: Elements of Relativistic Dynamics of a Continuum, Lect. Notes
Phys. 727, 239–262 (2008)
DOI 10.1007/978-3-540-73168-9 7 c© Springer-Verlag Berlin Heidelberg 2008

240 7 Elements of Relativistic Dynamics of a Continuum
The local tension state of the continuum, from a relative point of view,is also characterized by the relative specific stresses φn; the latter must besubstituted by the specific 4-stresses TN (T stands for tension and N ∈ M4
is a unit vector), since they must be defined in any Galilean frame, that is, inany spatial section Σ through E ∈ T . From this point of view, it appears quitenatural to require for the TN properties similar to the corresponding classicalones. We then have the following postulates for the relativistic continuoussystems [2, 3, 4]:
I From the absolute point of view, the tension state of the continuum ischaracterized by a vectorial function over a 3-surface: TN , which is definedin the closure of T and for each vector N;
II The relativistic Cauchy postulate holds, in the sense that TN is a linearand homogeneous function of the components of N:
TN = NαTα , Tα = (TN )N=cα ; (7.2)
III The reciprocity axiom holds:
TN ·N′ = TN ′ ·N , ∀N, N′ , (7.3)
that is the Eulerian stress 4-tensor Tαβ, given by
Tα = Tαβcβ , (α = 0, 1, 2, 3) , (7.4)
with respect to the Cartesian basis cα, satisfies the symmetry properties:
Tαβ = T βα, (α, β = 0, 1, 2, 3) . (7.5)
Next, one has to specify the relativistic extension of the Cauchy theo-rem, that is the evolution equations. The most natural extension is sug-gested again by the classical evolution equations, interpreting the latteras the spatial and temporal components of the same space-time equation,respectively; more precisely, from (6.5) and (6.12) one has
μe = (μ e). − μ e = ∂t(μ e) + ei∂i(μ e) + μ e∂iei = ∂t(μ e) + ∂i(μ eei) ,
so that system (6.4)–(6.12) can be cast in the following form:
∂tμ+ ∂i(μei) = 0 , ∂t(μ e) + ∂i(μ e ei) + ∂iφi = μF .
Thus, using (5.201)
μ = η2μ0 , η = 1/√
1− e2/c2 , (7.6)
as well as the ordinary decomposition of the 4-velocity (in Eulerian terms):
V = η(e + cγ) ∼ V 0 = ηc , V i = ηei , (7.7)

7.2 Proper Mechanical Stresses and Thermal Energy 241
the above equations can be summarized by a single space-time equation:
∂α(μ0VαV) + ∂iφ
i = μ0k , k = η2F ; (7.8)
the latter, in turn, suggests the most natural relativistic extension. In fact,the first term on the left-hand side of (7.8) represents a space-time diver-gence, and it is therefore invariant under Lorentz transformations. Simi-larly, the term on the right-hand side has an absolute meaning, since μ0 isinvariant and k a vector field, not necessarily orthogonal to γ. The secondterm on the left-hand side of (7.8), instead, being a spatial divergence, isnot invariant. However, by using (7.8), the assumed postulates I and IIand the fact that the coordinate stresses Tα transform like contravariantvectors, one gets their simplest generalization by simply replacing ∂iφ
i by∂αTα. Thus, we assume the following dynamical postulate:
IV Evolution equations:
∂α(μ0VαV) + ∂αTα = μ0k , ∀E ∈ T . (7.9)
In (7.9) all the fundamental relativistic ingredients of the absolute me-chanics of continuous systems appear: the proper density of proper massμ0, the 4-velocity V, the (coordinate) 4-stresses Tα and finally the4-density of mass force k. As in the classical case to the indefinite equa-tions one must add the
V Boundary conditions:VαTα = g , (7.10)
where Vα is the unit normal, internal to the boundary B of T (necessarilyspacelike). These conditions only require the specification of the surfaceexternal 4-forces g, in each point of B.
As in the classical case, in relativity (7.9) and (7.10) can be summa-rized by a single scalar symbolic relation. We will not enter into detailshere. However, we point out that the classical point of view, which resultsfrom adapting the “cardinal equations” of the mechanics to a continuum,has a clear correspondence in the Minkowski space, in the sense that theaxioms II–V follow, substantially, from adapting the linear and angularmomentum equations of the mechanics to a continuum scheme (integralformulation).
7.2 Proper Mechanical Stresses and Thermal Energy
The richness of the relativistic scheme with respect to the classical one alreadyshown in the case of a point particle also appears in continuum mechanics.Here both the tension and the mass forces do not have in general a purelymechanical character. One must consider that

242 7 Elements of Relativistic Dynamics of a Continuum
TN ·V �= 0 , k ·V �= 0 , ∀E ∈ T and N ∈M4 . (7.11)
Thus, the interface between mechanical and thermal actions is not limitedto the external forces (including surface forces) but is extended to internaland contact forces too (tension forces). We can then give to (7.9) a moretransparent form, decomposing the coordinate 4-stresses into the parts paralleland perpendicular to the 4-velocity V:
Tα = Xα +QαV , (7.12)
withXα ·V = 0 . (7.13)
The 4-vectors Xα and QαV are named, respectively, the purely mechanicaland the thermal stresses. The vectors Xα satisfy the conditions (7.13) andhence are spacelike vectors. The vectors QαV are parallel to V and hence aretimelike vectors. Note that both Xα and Qα belong to the proper frame sothat they have an intrinsic meaning.
In the following we will consider only ordinary continuous systems, charac-terized by the additional postulate XN = NαXα concerning the mechanicalstresses. We note that the vector Qα, because of the reciprocity axiom, is notindependent of the mechanical stresses; in fact, after scalar multiplying (7.12)by V and using (7.13), we have Tα ·V = −c2Qα; using (7.3) then leads to
−c2Qα = TV · cα = XV · cα + VβQβV · cα .
Thus, one has the following expression for Qα:
Qα = − 1c2
(XV · cα + V ·QV α) ,
that is,
Q =1c2
(εc,0 V −XV ) , (7.14)
where the proper density of thermal energy conduction
εc,0 = −Q ·V (7.15)
has been introduced. From (7.14) we see that the 4-vector Qα depends on Vand can be expressed using the mechanical stresses and the scalar invariantεc,0. The decomposition (7.12) can thus be written as
Tα =1c2εc,0V
αV + Xα − 1c2
XV · cαV , (7.16)
where V, εc,0 and the mechanical (nonsymmetric) stresses Xα appear.We define a continuum to be ordinary (with symmetric characteristics and
without thermal conduction) if the following postulate holds:

7.2 Proper Mechanical Stresses and Thermal Energy 243
VI The proper mechanical stresses satisfy a reciprocity axiom:
XN ·N′ = XN ′ ·N , ∀N,N′ . (7.17)
In this case, XN ·V = 0 , ∀N, implies
XV = VαXα = 0 , (7.18)
that is, absence of mechanical stresses in the direction of V(∀E ∈ T ).For an ordinary relativistic continuum, (7.14) then becomes
Q = μc,0V , (7.19)
where μc,0 is the proper density of thermal conduction:
μc,0 =εc,0
c2; (7.20)
Furthermore, (7.16) assumes the reduced form:
Tα = Xα + μc,0VαV . (7.21)
Using the proper mechanical stresses, the relativistic Cauchy equation (7.9)becomes
∂α(Xα + μ0VαV) = μ0k , (7.22)
where μ0 is the total proper density, sum of the pure matter density andthermal conduction:
μ0 = μ0 + μc,0 . (7.23)
We stress that the alignment of Q along V follows from the symmetry prop-erty of the mechanical stresses. For continuous systems having nonsymmetricaltension characteristics one has an enlarged scheme both from a geometricaland physical point of view. Actually, (7.19) will no longer be valid and, froman energetic point of view, the situation will be similar to that of an electro-magnetic field.
Equation (7.22) can be given in a scalar (Eulerian, because the independentvariables are the xα) form, by introducing the Cartesian components of the4-velocities as well as the decomposition
Xα = Xαβcβ , (α = 0, 1, 2, 3) , (7.24)
where the tension coefficients Xαβ are symmetric because of (7.17): Xαβ =Xβα, and satisfy the conditions XαβVβ = 0. Equation (7.22) then becomes
∂αMαβ = μ0k
β , (7.25)
with Mαβ the energetic tensor:
Mαβ def= μ0VαV β +Xαβ (7.26)

244 7 Elements of Relativistic Dynamics of a Continuum
and the usual conditions:
V αVα = −c2, Xαβ = Xβα , XαβVβ = 0 , (7.27)
so that one has the typical form of conservative equations with sources.Equation (7.25) are four first-order partial differential relations (divergence-
like equations) between the mass forces (sources proportional to the properdensity of pure matter μ0) and the energetic tensor Mαβ, which summarizesthe three fundamental characteristics of a continuous system (see (7.26)): thetotal proper density μ0,1 the 4-velocity V α and the purely mechanical properstresses Xαβ .
We will show later thatMαβ (with support in T ) summarizes the continuummaterial scheme under the only condition of admitting a timelike eigenvec-tor. In other words, knowing Mαβ is equivalent to knowing the fundamentalingredients μ0, V α and Xαβ, under the limitations (7.27).
From this point of view, for continuous systems the tensor Mαβ plays thesame role as the one played by the Lagrangian function for a system with ndegrees of freedom: they both describe—in a synthetic way—all the contentsof the scheme, in all its generality.
The fundamental equations of the continuum absolute dynamics have thefollowing form: ⎧⎨
⎩∂α(μ0V
αV β +Xαβ) = μ0kβ ,
XαβVβ = 0 , V αVα = −c2,(7.28)
where the source kβ must be assigned. These are 9 equations in 16 unknowns:μ0, μ0, V α andXαβ (the latter are 10, because of the symmetry of the tensor).The scheme is then compatible, starting from fixed initial and boundary condi-tions, with infinitely many possible motions of the system, even under regular-ity hypotheses for the assigned functions kα. Compared with the classical situ-ation, there is one more indetermination due to the presence in μ0 = μ0 +μc,0
of the thermal inertia term μc,0. Hence it is necessary to add to (7.28) sevenmore equations, the so-called constitutive equations, concerning the internalstructure of the continuum as well as its reaction to external solicitations.
7.3 Space-time Splitting Techniques. The Energy Tensor
The projection of a tensor along a given direction as well as onto the perpen-dicular 3-space constitutes a very useful and general decomposition method.This method is purely algebraic and is called natural decomposition. Here weelucidate it in the case of 2-tensors.
Let Tαβ be an arbitrary 2-tensor and V α a timelike vector, both defined ata given point E ∈ M4. We have the following polynomial decomposition (inV ) with tensorial character1 From this, once μ0 is known, one gets the thermal conduction term μc,0.

7.3 Space-time Splitting Techniques. The Energy Tensor 245
Tαβ = Sαβ + V αSβ + V βS′α + SV αV β , (7.29)
where the various quantities Sαβ , Sβ, S′α and S (respectively, a 2-tensor, twovectors and a scalar) satisfy the orthogonality conditions:
SαβVα = 0 , SαβVβ = 0 , SβVβ = 0 , S′αVα = 0 . (7.30)
In fact, from (7.30), multiplication of (7.29) by VαVβ gives
TαβVαVβ = S(VαVα)2 .
Thus, after definingV 2 = −(VαV
α) , (7.31)
one has the following expression for the scalar S:
S =1V 4
TαβVαVβ . (7.32)
Similarly, multiplying (7.29) by Vα and Vβ separately gives
TαβVα = −V 2(Sβ + SV β) , TαβVβ = −V 2(S′α + SV α) ,
from which the expressions for the vectors Sβ and S′β follow:
Sβ = − 1V 2
TαβVα − SV β , S′α = − 1V 2
TαβVβ − SV α . (7.33)
Finally, the same (7.29) together with (7.32) and (7.33) determines Sαβ asa function of Tαβ and V α, and this completes the proof.
The decomposition (7.29) is simplified if Tαβ is special. In particular,
• If Tαβ is symmetric, from (7.33) it follows that the two vectors S and S′
coincide: Sα = S′α and (7.29) becomes
Tαβ = Sαβ + V αSβ + V βSα + SV αV β , (7.34)
Sαβ being symmetric too;• If Tαβ is antisymmetric, (7.33) imply S = 0 and Sα = −S′α, so that (7.29)
becomesTαβ = Sαβ + V αSβ − V βSα , (7.35)
with Sαβ now antisymmetric.
Let us go back to the energy tensor Mαβ of the continuum, satisfying (7.26)and (7.27), and show that it characterizes the continuum scheme itself, givingall the necessary descriptional elements. To this end, let us assume the fieldMαβ to be assigned a priori as a symmetric tensor defined in the world tube

246 7 Elements of Relativistic Dynamics of a Continuum
T ∈ M4, and admitting a future-oriented timelike eigenvector V, ∀E ∈ T .From Mαβ one can obtain the total proper density and the mechanical stresstensor. In fact, Mαβ can be interpreted as a vectorial map from an arbitraryvector v into a vector w = M(v), i.e. vα → wα ≡ Mαβvβ . One can thenderive the principal directions of Mαβ :
Mαβvβ = λvα . (7.36)
Moreover,Mαβ can be cast in a diagonal form, since it admits an orthonormalbasis of eigenvectors. In fact, by hypothesis, it has a timelike eigendirectionwhich defines the world lines of the continuum as well as their 4-velocity V.Thus, in (7.31) one must consider V 2 = c2 and from (7.36) one has
MαβVβ = λV α . (7.37)
Equation (7.37) simplifies the natural decomposition of Mαβ along V, whichis of the type (7.34) because of the symmetry of Mαβ; hence, from (7.32) wehave
S =1c4MαβVαVβ =
1c4λV αVα = − 1
c2λ . (7.38)
Equation (7.33)1 then implies
Sβ = − λc2V β − SV β = 0 ,
so that (7.34) can be written as
Mαβ = Sαβ − λ
c2V αV β , SαβVβ = 0 . (7.39)
Comparing now the decomposition (7.39) with (7.26) shows that Sαβ can beinterpreted as the proper mechanical stress tensor Xαβ and, in turn, −λ/c2is the proper total density μ0.
We also note that Xαβ , as a tensor in M4, defines a degenerate map, admit-ting V as a null eigendirection; on the other hand, as a symmetric tensor inΣ0 (the spacelike platform orthogonal to V) it can be put in a diagonal form.Its (three) eigendirections are called principal directions of proper tension.
Hence a symmetric tensor field Mαβ, with a timelike eigenvector, character-izes a symmetric material scheme (ordinary continuum) with mass density μ0.
Electromagnetism too admits a symmetric energy tensor Eαβ , built up fromthe electromagnetic field. However, such a field is also defined outside thecharged matter, and it does not admit a preferred timelike eigenvector. Thisis a fundamental difference between the two schemes [1].
7.4 Dust Matter and Perfect Fluids
Let us consider the limiting case of material systems, exemplified by dustor sand, for which the 4-tensions can be neglected. This is the dust matter

7.4 Dust Matter and Perfect Fluids 247
scheme, characterized by the twofold condition that both the contact andthermal actions vanish identically:
Xαβ = 0 , μc,0 = 0 , ∀E ∈ T . (7.40)
The energy tensor reduces to the form
Mαβ = μ0VαV β , (7.41)
where μ0 is the pure matter density, and V α is the 4-velocity.One can study the special case in which the volume forces vanish too: kα =
0. Equation (7.22) then becomes ∂α(μ0VαV) = 0, so that
∂α(μ0Vα)V + μ0V
α∂αV = ∂α(μ0Vα)V + μ0A = 0 , (7.42)
where A = V α∂αV = dV/dτ is the 4-acceleration. After contracting (7.42)with V and using V · A = 0, one obtains the proper mass conservationequation:
∂α(μ0Vα) = 0, ∀E ∈ T . (7.43)
The latter equation implies, in Eulerian terms, the property that along thegeneric world line of the continuum the elementary proper mass μ0dC0 ≡ dm0
is constant:
μ0D0 = const. ∼ ddτ
(μ0D0) = 0 , ∀E ∈ T . (7.44)
In fact, by using the identity
1D0
dD0
dτ= ∂αV
α , (7.45)
(7.43) becomes
V α∂αμ0 + μ0∂αVα ≡ dμ0
dτ+μ0
D0
dD0
dτ= 0 ,
which coincides with (7.44). Thus the world lines of each element are timelikestraight lines and the proper mass is conserved just as for a single point-massin the absence of external forces.
A less extreme case is that of nonviscous fluids, namely material systemsfor which the mechanical stress Xn is parallel to n, ∀E ∈ T and ∀n ∈ Σ0
(spatial platform in the proper frame, i.e. orthogonal to V):
Xn = p0n, ∀E ∈ T , ∀n ∈ Σ0 . (7.46)
The proportionality factor p0 is independent of n and is called proper pressureof the fluid at the considered point. We can now evaluate Xαβ from (7.46);using the equality Xn = nαXα = nαX
αβcβ , one has

248 7 Elements of Relativistic Dynamics of a Continuum
nαXαβ = p0n
β ≡ p0nαmαβ ,
so that(Xαβ − p0m
αβ)nα = 0 , ∀n ∈ Σ0 . (7.47)
Because of the arbitrariness of n ∈ Σ0, (7.47) is equivalent to the conditionthat, for any fixed value of β = 0, 1, 2, 3, the vectorXαβ−p0m
αβ is orthogonalto Σ0 and hence parallel to V:
Xαβ − p0mαβ = λβV α . (7.48)
Using the restriction (7.27)3: XαβVα = 0, one can now determine λβ :
−p0mαβVα = −c2λβ → λα =
1c2p0V
α ,
that is
Xαβ = p0
(mαβ +
1c2V αV β
), (7.49)
and alsoMαβ = p0m
αβ +(μ0 + μc,0 +
p0
c2
)V αV β . (7.50)
As concerns the number of equations and unknowns, in the case of dust mat-ter there are five equations for five unknown: μ0 and V α ((7.28)2 vanishesidentically). In the case of nonviscous fluids there are seven unknowns: μ0, μ0,V α and p0 but still only five equations. In fact, (7.28)2 identically vanisheseven in this case because of (7.49):
p0
(mαβ +
1c2V αV β
)Vα = p0(V β − V β) = 0 .
To have the same number of unknowns and equations one therefore needs twoconstitutive equations. It is sufficient, for example, that the thermal inertiais absent and that a reduced state equation (i.e. an explicit relation betweenpressure and proper density) holds; this is exactly the perfect fluid scheme,characterized by (7.50) plus the conditions
μc,0 = 0 , μ0 = μ0 = μ0(p0) . (7.51)
From here one can directly approach relativistic perfect fluids.Let us return to the general case in order to compare the classical and the
relativistic situations as well as to show the fundamental role of the first lawof thermodynamics in giving us a fully determined set of equations.
7.5 Absolute Dynamics of OrdinaryRelativistic Continua
Let us consider the evolution equations (7.22) for an ordinary relativisticcontinuum in a given Galilean frame:

7.5 Absolute Dynamics of Ordinary Relativistic Continua 249
∂α(μ0VαV + Xα) = μ0k .
Expanding the derivative, one has
∂α(μ0Vα)V + μ0V
α∂αV = μ0k− ∂αXα ,
where V α∂αV = dV/dτ = A. Thus
∂α(μ0Vα)V + μ0A = μ0k− ∂αXα . (7.52)
Multiplying by V and using V ·A = 0, one has
−c2∂α(μ0Vα) = μ0k ·V − ∂αXα ·V ;
but Xα ·V = 0 identically, so that
∂αXα ·V = ∂α(Xα ·V) −Xα · ∂αV = −Xα · ∂αV ,
and one findsc2∂α(μ0V
α) = −μ0k ·V −Xα · ∂αV ,
orc2∂α(μ0V
α) = μ0r0 − w(i)0 , (7.53)
where we have introduced the following proper quantities:⎧⎨⎩r0
def= −k ·V thermal radiation power density,
w(i)0
def= Xα · ∂αV internal forces power density;(7.54)
the thermal radiation power density is meant per unit of proper mass whilethe internal forces power density is considered per unit of proper volume.Substituting (7.53) in (7.52) leads to the Newtonian equation:
μ0A = F0 , (7.55)
where F0 represents the proper mechanical force per unit proper volume:
F0def= μ0k− ∂αXα − 1
c2(μ0r0 − w(i)
0 )V . (7.56)
The Newtonian equation (7.55) shows in what sense the element of a contin-uum can be compared to a point-mass (apart from the multiplication by theproper volume element dC0): as concerns the acceleration, the proportional-ity factor is now μ0 = μ0 + μc,0 (total inertial mass per unit proper volume),and it includes both the pure matter inertia μ0 and the thermal inertia μc,0.As concerns the proper mechanical force F0, instead, one must add to thematerial point term

250 7 Elements of Relativistic Dynamics of a Continuum
μ0f = μ0
(k− 1
c2r0V)≡ μ0kΣ0 ,
(in place of the 4-force k, one has the proper density of 4-force: dK/dC0 =μ0k) the contribution of the internal (contact) forces
μ0f (i) ≡ −∂αXα +1c2w
(i)0 V ; (7.57)
these terms are both orthogonal to V, because of (7.54)2 and (7.13), that is
Xα ·V = 0 ∼ XαβVβ = 0 . (7.58)
Equation (7.53) represents the energy theorem of the relativistic continuumin the proper frame S0. In fact, after evaluating the derivative and using theidentity (7.45), (7.53) becomes
c2
D0
ddτ
(μ0D0) = W0def= μ0r0 − w(i)
0 . (7.59)
Thus, up to multiplication by the proper volume element dC0 = D0dC, (7.59)corresponds to the (proper) energy theorem of the material point (even if witha different meaning):
dE0dτ
= q0, (E0 → μ0c2 dC0, q0 →W0 dC0) .
Clearly, passing to the continuum implies a twofold modification, because ofthe presence of the density of proper thermal energy μc,0c
2 in addition to thepure matter term μ0c
2 and because of the thermal power, which includes the4-force (mass) term, as well as the contribution due to internal stresses.
The proper power of internal forces w(i)0 can be cast in the classical form
(6.24) differently from the relative power. In fact, transforming (7.54)2 throughthe tension characteristics Xαβ = Xβα leads to
w(i)0 = Xαβ∂αVβ =
12Xαβ(∂αVβ + ∂βVα) .
Next introducing the proper deformation 4-velocity
καβdef=
12(∂αVβ + ∂βVα) , (7.60)
one has the (quasi) classical expression (because it is four-dimensional):
w(i)0 = Xαβ καβ . (7.61)
The latter, in turn, can be reduced to the classical expression if, according to(7.34), we consider the natural decomposition of the tensor ∂αVβ :

7.5 Absolute Dynamics of Ordinary Relativistic Continua 251
∂αVβ = Hαβ + VαSβ + VβS′α + SVαVβ , (7.62)
with the conditions
HαβVβ = 0, SαβV
α = 0, SβVβ = 0, S′αVα = 0. (7.63)
In fact, since (∂αVβ)V β = 0, one has
S = 0 , S′α = 0, Sβ = − 1c2Aβ . (7.64)
Moreover, the 4-acceleration is proportional to the curvature vector of theworld line by a factor c2:
Aα = c2Cα, (7.65)
so that (7.64) imply for (7.62) the form
∂αVβ = Hαβ − VαCβ , (7.66)
subjected to the conditions given in (7.63):
HαβVβ = 0 , HαβV
α = 0 , CαVα = 0 . (7.67)
Using the restriction (7.58) one then gets the following expression for (7.61):
w(i)0 = Xαβκαβ = XαβH(αβ) , (7.68)
which, in terms of proper quantities, has the same meaning as the classicalformula (6.24). In fact, as will be more clear later, the spatial tensor H(αβ)
has the meaning of ordinary deformation velocity, even though with respectto the Galilean rest frame.
Finally, as concerns (7.59), besides expressing the energy theorem it isstrictly related with the classical mechanics of continuous systems. In fact,by introducing the density of proper internal energy ε0
μ0ε0def= μ0c
2 , ε0 = c2 +μc,0
μ0c2 , (7.69)
so that (7.59) becomes
1μ0D0
ddτ
(μ0D0ε0) = r0 −1μ0w
(i)0 , (7.70)
thus representing (in the Galilean proper rest frame S0) the first law of ther-modynamics (6.19).
Comparing the relativistic situation with the classical one, (7.70) is for-mally identical to the expression (6.19) of the first law of thermodynamics,apart from the replacement of the classical quantities by the correspondingproper relativistic quantities. However, there is a relevant difference: in clas-sical mechanics q and ε represent the internal energy of the continuum and

252 7 Elements of Relativistic Dynamics of a Continuum
the exchanged heat (either through radiation or conduction), respectively; inrelativity, instead, q0 and ε0 come directly from the adopted scheme, clearlyricher than the classical one.
One then finds, as for the material point, the relativistic unification betweenmechanics and thermodynamics. In addition, the relativistic scheme containsanother fundamental element for the description of the thermal field: theproper vector of thermal conduction q0. We will come back to this point inthe next chapter.
7.6 Relative Dynamics of Ordinary Relativistic Continua
As we have already done for the material point, we are now ready to consider,besides the absolute formulation, the “relative” formulation with respect toa given Galilean frame. To develop such an approach which is fundamentalfrom a physical point of view one needs to:
1. specify the temporal direction γ, which characterizes the frame and (lo-cally) decompose along γ and orthogonally to it, in Σ, all the varioustensorial quantities;
2. correctly (from both the mathematical and physical point of view) definethe relative quantities;
3. obtain the transformation laws of the relative quantities for an arbitrarychange of the frame.
Let us consider then a general Galilean frame Sg and let γ = c0 be thetemporal direction and {ci} (i = 1, 2, 3) a spatial triad in Σ (associated withinternal coordinates). From (7.18) we have the following conditions for themechanical stresses Xα:
VαXα = 0 ∼ Xα ·V = 0 ,
and using the relations V0 = −ηc and Vi = ηei one gets the following expres-sion for X0:
X0 =1ceiXi . (7.71)
Moreover, the natural decomposition of Xi: Xi = φi − (Xi · γ)γ, where
φi = X ikck ∈ Σ , (i = 1, 2, 3) , (7.72)
assumes here a simple form, because of the condition
Xi ·V = 0 ←→ Xi · (e + cγ) = 0 ←→ Xi · γ = −1cXi · e ,
orXi · γ = −1
cφi · e .

7.6 Relative Dynamics of Ordinary Relativistic Continua 253
In fact, the latter becomes
Xi = φi +1cφi · eγ , (i = 1, 2, 3) , (7.73)
and the proper mechanical stresses Xα are all functions of the vectors φi—given by (7.72)—and of e and γ.
It is quite natural to call the vectors φi the specific coordinate stresses,relative to the chosen Galilean frame Sg. They also satisfy the ordinary Cauchytheorem, so that the specific stress relative to the normal n ∈ Σ is
φn = niφi , ∀n ∈ Σ, ; , ∀P ∈ C . (7.74)
The natural decomposition (7.71)–(7.73), even if intrinsic in Sg, essentiallydepends on the choice of Sg. In particular, in the proper frame S0, one hasX0 = 0 and Xi = φi
0, which specifies the physical meaning of the vectors Xα.Let us project now the evolution equations (7.22) onto Σ and along γ,
starting from the term ∂α(μ0VαV). By using the (Eulerian) decomposition
V = η(e + cγ) (7.75)
and defining the total density of relative mass
μdef= μ0η
2 , (7.76)
one has
∂α(μ0VαV) = ∂i[μei(e + cγ)] +
1c∂t[μc(e + cγ)]
= ∂i(μeie) + ∂t(μe) + [∂i(μei) + ∂tμ]cγ .
Hence, expanding the partial derivatives and using (6.5) together with thekinematical identity (6.11), we have
∂α(μ0VαV) =
1D
[(μDe). + (μD).cγ] .
Similarly, (7.71) and (7.73) imply
∂αXα = ∂iφi +
1c∂i(φi · e)γ +
1c2∂t(eiφ
i) +1c3∂t(eiφ
i · e)γ .
Introducing now the relative mass force per unit relative mass, F:
μF def= μ0kΣ ≡ μ0(k + k · γγ), μdef= μ0η
2 , (7.77)
gives rise to the linear momentum theorem
1D
(μDe). = μF def= μF− ∂iφi − 1
c2∂t(eiφ
i) , (7.78)

254 7 Elements of Relativistic Dynamics of a Continuum
as well as to the energy theorem
1D
(μDc2). = μWdef= −μ0ck · γ − ∂i(φi · e)− 1
c2∂t(eiφ
i · e) . (7.79)
In contrast to (7.70), the latter equation is not in its final form, since theright-hand side should correspond to the total power W . However, by using(7.75): −cγ = e −V/η, and introducing the specific relative quantities (perunit relative volume)
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
με = μc2 internal energy,
μr = −μ0k ·V/η radiation thermal power,
w(i) = φi ·(∂ie +
1c2ei∂te
)internal forces power,
(7.80)
(7.78) can be cast in the typical form:
1μD
(μDε). = Wdef= F · e + r − 1
μw(i) . (7.81)
Comparing this relation with the material point scheme, we have the addi-tional term −1/μw(i), which is related to the internal structure of the con-tinuum. In the relativistic Cauchy equation (7.78) there appears, instead, theterm −1/c2∂t(eiφ
i), absent classically, but also contained in the expression ofthe power w(i).
7.7 Transformation Laws of the FundamentalRelative Quantities
Equations (7.78) and (7.80) obey the relativity principle, since they are for-mally invariant with respect to the choice of the Galilean frame Sg. However,they are not substantially invariant because of the relative meaning of thevarious quantities. All the relative quantities introduced above (in particularε, r and w(i)) have instead a real physical content; that is, they cannot bemade as vanishing by a simple change of Galilean frame. In fact, the follow-ing properties of absolute invariance hold (the index 0 denoting the properquantities): ⎧⎪⎪⎪⎨
⎪⎪⎪⎩
ε = μ0c2/μ0 = inv. = ε0,
η3r = −k ·V = inv. = r0,
ηw(i) = Xα · ∂αV = inv. = w(i)0 .
(7.82)
Equations (7.82)1,2 directly follow from the definitions (7.80)1,2, using (7.76)and (7.69) as well as the relation μ = μ0η
2.

7.7 Transformation Laws of the Fundamental Relative Quantities 255
Equation (7.82)3 follows, instead, from (7.54)2 using (7.58), (7.71) and(7.73), that is:
w(i)0 = Xα · ∂αV = Xα · ∂α[η(e + cγ)]
= ∂αηXα · Vη
+ ηXα · ∂αe
= η
(Xi · ∂ie +
1cX0 · ∂te
)
= η
(φi · ∂ie +
1c2eiφ
i · ∂te)
= ηw(i) .
From (7.82), using the relations
η′
η=σ
α, α =
√1− u2
c2, σ = 1− u · e
c2, (7.83)
one immediately gets the transformation laws of r and w(i), when passingfrom Sg to S′
g:
r′ =(ασ
)3
r , w′(i) =(ασ
)w(i) , (7.84)
which in the classical situation (c→∞) reduce to invariance laws.As concerns the mass force of (7.77), the corresponding transformation law
can be derived from the one valid for the material point, apart from the factthat F and q now refer to the unit of relative mass. Thus, from (3.60), aftermultiplying both sides by dm/dm′ = α/σ, one gets the transformation lawfor F:
F′ =α
σ2
[αF− 1
c2(F ·w + r)u
], (7.85)
involving the thermal power r given by (7.79)2 as well as the vector
w def= e− 11 + α
u . (7.86)
Also in this case, as for the material point, the condition F = 0 does notimply F′ = 0, and hence has no absolute meaning. On the other hand, boththe conditions r = 0 and w(i) = 0 are absolute.
We next consider the transformation laws of the relative mechanical stressesφi = X ikck or, equivalently, that of φn = niφ
i. To this end we proceed asfollows:
1. start from the proper mechanical stresses Xα:
Xα = Xαβcβ , (7.87)
that is, from the symmetric tensor Xαβ;

256 7 Elements of Relativistic Dynamics of a Continuum
2. use the Lorentz transformation in standard x1-direction:
x′0 =1α
(x0 − βx1) , x′1 =1α
(x1 − βx0), x′2,3 = x2,3; (7.88)
3. evaluate the components X ′ik = (∂x′i/∂xα)(∂x′k/∂xβ)Xαβ, where
∂x′i
∂xα=
⎛⎜⎝−βα
1α
0 0
0 0 1 00 0 0 1
⎞⎟⎠ . (7.89)
From (7.89) we thus have the relations⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
X ′11 =1α2
(β2X00 − βX10 − βX01 +X11),
X ′1a =1α
(X1a − βX0a),
X ′2a = X2a , X ′33 = X33,
where a = 2, 3; from the latter, in turn, up to a boost on Σ, we obtain therelative stresses to S′
g:φ′i = X ′ikc′k , (7.90)
that is,⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
φ′1 =1α
(1αX11c1 +X12c2 +X13c3 −
β
αX10c1
)
−βα
(1αX01c1 +X02c2 +X03c3
)+β2
α2X00c1,
φ′a =1αXa1c1 +Xa2c2 +Xa3c3 −
β
αX0ac1 , (a = 2, 3).
(7.91)
We must now transform the right sides using the relation
φi = X ikck, X0 = X0αcα =1cei
(φi +
1cφi · ec0
), (7.92)
so thatX0kck =
1ceiφ
i, X00 =1c2eiφ
i · e . (7.93)
Moreover, by using the identity
1α
= 1 + x , x =1c2
u2
α(1 + α), (7.94)
the sumSi =
1αX i1c1 +X i2c2 +X i3c3 , (i = 1, 2, 3) ,

7.7 Transformation Laws of the Fundamental Relative Quantities 257
reduces to the formSi = φi + xX i1c1 ,
that is,
Si = φi +1c2
φi · uα(1 + α)
u . (7.95)
Similarly, from (7.93) and using the symmetry of X ik, we have
X0i =1cekφ
k · ci =1cekφ
i · ck
orX0i =
1cφi · e, (i = 1, 2, 3) ; (7.96)
thus, (7.91)2 become
φ′a = φa − 1c2α
φa ·wu, (a = 2, 3) , (7.97)
with w defined by (7.86).As concerns (7.91)1, there appear terms as in (7.97) and additional terms
as in (7.93) and (7.96):
φ′1 =1α
(φ1 − 1
c2αφ1 ·wu
)− β
α
(1ceiφ
i + xX01c1
)+
1c2β2
α2eiφ
i · ec1
= φ1 − 1c2α
φ1 ·wu + x
(φ1 − 1
c2αφ1 ·wu
)− β
α
(1ceiφ
i + xφ1 · ec1
)
+1c2β2
α2eiφ
i · ec1 .
Using the relation φ1 =1uφu leads to
φ′1 = φ1 − 1c2α
φ1 ·wu +1c
β
α
11 + α
(φu −
1c2α
φu ·wu)
−1c
β
αφe −
1c3α2
β
1 + αφu · eu +
β
c3α2φe · eu .
Noting that φu · e = φe · u, after some algebraic manipulation one gets
φ′1 = φ1 − 1c2α
φ1 ·wu− 1c2α
uφw −1
c4α2
u
1 + αφu ·wu
+1
c4α2uφw · eu ,
and finally
φ′1 = φ1 − 1c2α
φ1 ·wu− u
c2α
(φw −
1c2α
φw ·wu). (7.98)

258 7 Elements of Relativistic Dynamics of a Continuum
Therefore, taking into account the meaning of u in x1-standard coordinates,(7.97) and (7.98) are summarized by the following relation, without any re-striction on the choice of the triad T ∈ Sg:
φ′i = φi − 1c2α
φi ·wu− ui
c2α
(φw −
1c2α
φw ·wu). (7.99)
After multiplying by ni one then also gets the corresponding relation betweenthe mechanical stresses in Sg and S′
g, with respect to the given direction n:
φ′n = φn −
1c2α
φn ·wu− n · uc2α
(φw −
1c2α
φw ·wu), (7.100)
where the dependence on the velocity e and on the continuum element isthrough the vector w given by (7.86).
In the limit c → ∞ one recovers the classical invariance: φ′n = φn; in
the relativistic context, instead, the condition φn = pn in Sg does not havean invariant meaning, since φ′
n �= p′n. In other words, the classical conceptof nonviscous fluid is meaningless in relativity, and the hypothesis of purepressure can only be formulated in the proper frame. However, since φw =wiφ
i, (7.99) can be cast into the form
φ′i =(δil −
1c2α
uiwl
)(φl − 1
c2αφl ·wu
), (7.101)
and thus in terms of the tension characteristics:
X ′ik = BilX
lmBkm , (7.102)
through the spatial 2-tensor
Bil
def= δil −
1c2α
uiwl , (7.103)
which has already been introduced in Chap. 5.
7.8 Energy Theorem and the First Lawof Thermodynamics
In the classical context, the first law of thermodynamics is meant to be asubstitute for the energy theorem, i.e. it is introduced to correct the evaluationof the kinetic energy. Equation (7.80) confirms this interpretation, in the sensethat it is equivalent to the first law of thermodynamics, once it satisfies therelativistic Cauchy (7.78). To show this, it is enough to eliminate from (7.78)and (7.80) the specific mechanical power: F · e. After multiplying (7.78) by eand using the relation

7.8 Energy Theorem and the First Law of Thermodynamics 259
e2 = c2(
1− 1η2
), (7.104)
one has
μF · e =1D
(μD).e2 +12μ(e2). =
1D
(μDc2).
(1− 1
η2
)+
1η3μc2η ,
so that (7.80) becomes
1Dη2
(μDc2
). − μc2
η3η = μr − w(i) .
Multiplying the latter expression by η finally gives
1D
(μ
ηDc2).
= η(μr − w(i)) ;
introducing then the specific internal energy με = μc2, as from (7.80)1, leadsto
1D
(μ
ηDε
).
= η(μr − w(i)) . (7.105)
This is exactly the relativistic form of the first law of thermodynamics givenby (6.19). Because of the invariance properties ηD = inv. = D0 and μ/η2 =inv. = μ0 and using the substantial derivative
η( ). def=ddτ
( ) = V α∂α( ) , (7.106)
(7.105) is equivalent to the energy theorem (7.70) in the proper Galilean frameof the generic continuum element:
1D0
ddτ
(μ0D0ε0) = μ0r0 − w(i)0 . (7.107)
Furthermore, using the kinematical identity (5.201)
1D0
dD0
dτ= ∂αV
α ∼ ∂α
(1D0
V α
)= 0 , (7.108)
allows us to cast (7.107) into a balance equation:
∂α(μ0ε0Vα) = μ0r0 − w(i)
0 = η(μr − w(i)) . (7.109)
In conclusion, from the relative point of view, the general framework of rel-ativistic continuum mechanics is summarized by the following Eulerian equa-tions:

260 7 Elements of Relativistic Dynamics of a Continuum
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
1D
(1c2μDεe
).
=1η2μkΣ − ∂iφ
i − 1c2∂t(eiφ
i),
1D
(1ημDε
).
= η(μr − w(i)),
(7.110)
where the dot denotes the molecular derivative (7.106). Obviously, the relativenumerical density 1/D is not independent of the velocity e from the differentialpoint of view since we have
D
D= div e , (7.111)
which takes the place of the classical equation of mass conservation. The gen-eral equations are then 5 in 12 unknowns: μ (mass density), 1/D (numericaldensity), ei (Eulerian velocity), X ik (tension characteristics) and ε (specificinternal energy). To have the same number of equations as unknowns, oneneeds seven more equations. This is not surprising, since one should includeinto the equations the characteristic properties of the continuum (thermody-namical state functions). These are the constitutive equations which, as inthe classical case, involve the energy ε and the mechanical stress X ik, i.e.the so-called characteristic functions ε = ε(μ,D, ei) and X ik = X ik(μ,D, ei),necessary to make the scheme fully determined.
7.9 Continua Without Material Structure
The system (7.110) can be conveniently transformed after separating μ0ε0 =μ0c
2 (with ε = ε0 from (7.82)) into the pure matter proper energy from theproper thermal energy:
μ0ε = μ0c2 + εc,0, ε = c2 + ε , (7.112)
where ε def= εc,0/μ0 or, in relative terms,
με = μc2 +μ
μ0εc,0 = μc2 + με . (7.113)
Equations (7.110) and (7.111) then become⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
1D
(μDe). = μ0kΣ − ∂iφi − 1
c2
[∂t(eiφ
i) +1D
(μDεe).
],
1D
(1ημD
).
= − 1c2
[1D
(1ημDε
).
− η(μr − w(i))],
D
D= div e,
(7.114)
which shows the sources of linear momentum and energy, respectively, con-sidered in the ordinary sense, that is, in the strictly material context. From

7.9 Continua Without Material Structure 261
the absolute point of view, up to the boundary conditions, such sources weresummarized in the volume 4-forces and in the 4-stresses; from the relativepoint of view, instead, they are identified with kΣ, r, the mechanical stressesφi and with the thermal energy ε.
Thus, in order to have the same number of equations as unknowns, onemust specify these sources, which are a priori completely free, apart from theinvariance conditions imposed by the relativistic theory.
Apart from the analogy of (7.110) and (7.111) with the material pointdynamics, the presence in ε of the thermal contribution both to the inertiaand to the internal energy represents a completely new feature of relativisticcontinuum mechanics. This is even more evident if one considers a continuumof classic type, without internal structure, i.e. a continuum such that eachparticle has the proper mass as a conserved quantity:
ddτ
(μ0D0) = 0 ∼ μ0D0 = const. for each element of S . (7.115)
In each Galilean frame, the following conservation theorem holds:(μ
ηD
).
= 0 ∼ μ
ηD = const. for each element of S , (7.116)
and (7.114) reduces to the form
μ
ηε = η(μr − w(i)) , (7.117)
which is the ordinary first law of thermodynamics. The presence on the right-hand side of the thermal power shows that it cannot be deduced from theequations of motion. Thus, in the continuum scheme, even without any in-ternal structure, the energy theorem remains independent of the equations ofmotion. This is a peculiar property of the continuum scheme, because it hasno counterpart in the dynamics of particles without internal structure.
In conclusion, for an ordinary relativistic continuum, the relative equationsare six (one more than in the general case, because of the constraint (7.115)):⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
(μ
ηD
).
= 0 ,D
D= div e,
1D
(μDe). =1η2μkΣ − ∂iφ
i − 1c2
[∂t(eiφ
i) +1D
(μDεe).
],
μ
ηε = η(μr − w(i)),
(7.118)
and there are five unknowns: μ, D and ei. The last equation is a constrainton the laws of the sources ε, r and X ik (with the last two terms coming fromthe internal force power). For instance, it can be used to determine r, startingfrom the constitutive functions ε = ε(...) and X ik = X ik(...), which remainfree. Obviously, in such a case kΣ must also be assigned.

262 7 Elements of Relativistic Dynamics of a Continuum
If, instead, the thermal power is assigned, the constitutive equations forε = ε(...) and X ik = X ik(...) are necessarily subject to the thermodynamicalconstraint (7.118)3. We note that (7.118)4 represents the conservation of theparticle number all along the motion. In fact, it can be written as
1D∂tD = − 1
D∂iDe
i + ∂iei ≡ D∂i
(1Dei
),
or
∂t
(1D
)+ ∂i
(1Dei
)= 0 . (7.119)
This completes the proof if one compares the equation just obtained with theordinary mass conservation equation, taking into account that 1/D representsthe number of particles of the continuum per unit volume in Sg.
Finally, as concerns the classical situation (c → ∞), the system (7.114)allows us to re-obtain the ordinary Cauchy equation and it also shows thatthe energy theorem reduces to the mass conservation theorem: μD = const.The coupling with thermodynamics is then lost and the first law of thermo-dynamics must be assumed as an extra postulate representing the relativisticcorrection to order 1/c2 of the same (7.114)2.
References
1. A. Lichnerowicz, Theories relativistes de la gravitation et de l’electromagnetisme,Ed. Masson, Paris (1955). 246
2. G. Ferrarese, Introduzione alla dinamica Riemanniana dei sistemi continui, Ed.Pitagora Bologna (1981). 240
3. G. Ferrarese, Lezioni di meccanica superiore, Ed. Veschi, Roma (1968). 2404. G. Ferrarese, Sur la formulation 3-dimensionnelle de la thermodynamique rel-
ativiste, Actes des Journees relativistes de Toulouse, 23–24, 4, 57–68 (1986);Sulla Formulazione della termodinamica dei continui relativistici. Rend. Semin.Mat. Fis. Milano, 56, 113–24 (1986); Intrinsic formulations in relativistic con-tinuum mechanics, Proceedings of the conference Selected Problems of ModernContinuum Theories, Bologna, 49–58 (1987); Sulla formulazione intrinseca dellameccanica dei continui relativistici, Atti Semin. Mat. Fis. Univ. Modena, 36,289–302 (1988). 240

8
Elements of Relativistic Thermodynamicsof a Continuum
8.1 Introduction
We have already noted that relativity with its fundamental notion of space-time is the most convenient framework for the description of physics, in partic-ular for mechanical and electromagnetic phenomena. In fact, in the mechani-cal context, it represents the first important step in the process of conceptualunification of physics. This process, starting from ordinary particles (constantproper mass), becomes more and more meaningful in the dynamics of par-ticles endowed with internal material structure, where the energy theoremis independent of the momentum theorem. There are two important aspectsconcerning such unification: (1) the mass and the kinetic energy combine intothe material energy; (2) the mechanical and thermal actions combine into the4-force.
Passing from the pointlike scheme to the more general one of a continuum,the unifying process is continued in a natural way. In fact,
1. the notion of 4-stress summarizes the mechanical stress, the internal en-ergy and the thermal conduction vector;
2. the mass or volume 4-force includes both the mechanical action and thethermal radiation;
3. the surface 4-force takes into account both the mechanical action on asurface and the effect of thermal contact with other bodies.
There are clear advantages associated with the absolute formulation of thethermomechanics of continua. However, besides the elegant and synthetic ab-solute formulation one has to consider, especially from the physical point ofview, the relative formulation with corresponding properties of invariance, ei-ther formal with respect to the choice of the Galilean frame or contentwiseunder time translations and space translations and rotations. In order to havea physical content and a general validity a relative theory must be in turn for-mulated in an arbitrary Galilean frame. In addition, the theory must include
G. Ferrarese and D. Bini: Elements of Relativistic Thermodynamics of a Continuum, Lect.
Notes Phys. 727, 263–307 (2008)
DOI 10.1007/978-3-540-73168-9 8 c© Springer-Verlag Berlin Heidelberg 2008

264 8 Elements of Relativistic Thermodynamics of a Continuum
the transformation laws of the relative ingredients, passing from one frame toanother.
The relativistic framework is deeply modified with respect to the classicalone (and even simplified) either for the relativistic corrections to the tradi-tional physical ingredients (mechanical stress, power of internal forces, internalenergy, mechanical power, etc.) or for the changes required to the fundamen-tal equation and, finally, for the relative meaning and dynamical content ofsuch quantities, typical in relativity. In such a framework, the classical resultbecomes better clarified, especially as concerns the decoupling mechanism ofcertain quantities (see e.g. the role of the first law of thermodynamics).
In this chapter we will limit our attention to the case of nonpolar continua,characterized by the condition that the 4-stress tensor be symmetric [1].
The more general scheme of polar relativistic continua, not considered herebecause of its complexity, is related to nonsymmetric energy–momentum ten-sors. The latter are continuous systems which already in the classical contextrequire the introduction of mass and stress moments [2, 3] from the dynami-cal point of view; moreover, from the geometrical–kinematical point of view,they imply the enlargement of the pointlike structure to spinning particles,by means of applied vector fields (directors) (see e.g. the case of Cosseratcontinua [4, 5]) or tensor fields (general microstructures). The study of po-lar continua in the relativistic context is motivated by the conjecture thatthe further unification of thermodynamical and electromagnetic properties ofmatter will require a relation between the antisymmetric part of the stresstensor and the electromagnetic field.
However, we will not further discuss the fascinating problem of unification,but we will start again from the ordinary scheme, in order to complete somegeneral aspects concerning the mechanical stresses and their associated propervalues, e.g. the Lagrangian power of internal forces and the associated notionof isotropy, the class of systems undergoing reversible transformations and thethermodynamics of perfect fluids.
8.2 Nonpolar Continua
Let us consider the decomposition of the coordinate 4-stresses Tα (α =0, 1, 2, 3):
Tα = Tα +QαV , Tα ·V = 0 , (α = 0, 1, 2, 3) . (8.1)
The total stress TN = NαTα (∀E ∈ T and ∀N ∈M4) splits into two parts:
TN = TN +QNV , TN = NαTα , QN = NαQα , (8.2)
which we will call proper total mechanical stress and proper thermal flux atthe point E and along the direction N, respectively. The former, orthogonal

8.2 Nonpolar Continua 265
to V according to (8.1)2, is a spacelike vector. The latter is instead parallelto V and hence timelike. In the following we will use the notation
Tα = Tαβcβ , Tα = Tαβcβ , (8.3)
without assuming a priori the symmetry of Tαβ.Let us decompose Tαβ into its symmetric and antisymmetric parts:
Tαβ = Xαβ0 + Fαβ
0 , Xαβ0
def= T (αβ) , Fαβ0
def= T [αβ] . (8.4)
We will callXαβ0 = Xβα
0 the proper mechanical stress tensor and Fαβ0 = −F βα
0
the proper electromagnetic tensor. These two quantities are unified by Tαβ.Consider now the natural decomposition along V of all three tensors intro-duced above: Xαβ
0 , Fαβ0 and Qα, locally associated with the tension tensor
Tαβ. We have
Xαβ0 = Xαβ +XαV β +XβV α +XV αV β , (8.5)
and similarly
Fαβ0 = Hαβ + EαV β − EβV α , c2Qα = qα
0 + εc,0Vα , (8.6)
where all the newly introduced tensors are spatial, i.e. they belong to theplatform Σ0 orthogonal to V at E ∈ T :
⎧⎨⎩Xαβ = Xβα , XαβVβ = 0 , XαVα = 0,
Hαβ = −Hβα , HαβVβ = 0 , EαVα = 0 , qα0 Vα = 0.
(8.7)
Clearly, they are not all independent; for example (8.1)2, after the decompo-sition (8.4), becomes
Xαβ0 Vβ + Fαβ
0 Vβ = 0 .
Because of (8.5), (8.6) and (8.7), this equation is equivalent to the conditionXα +XV α + Eα = 0, that is:
X = 0 , Xα = −Eα .
Therefore, (8.1) and (8.5) assume, respectively, the following forms:
Xαβ0 = Xαβ − EαV β − EβV α (8.8)
andTαβ = Xαβ +Hαβ +
1c2qα0 V
β − 2EβV α +1c2εc,0V
αV β , (8.9)
with εc,0 introduced in (7.20). One can then evaluate the antisymmetric partof the tension tensor:

266 8 Elements of Relativistic Thermodynamics of a Continuum
T [αβ] = Hαβ +(Eα +
12c2
qα0
)V β −
(Eβ +
12c2
qβ0
)V α .
Hence, the necessary and sufficient condition for the tension tensor Tαβ to besymmetric is
Hαβ = 0 , Eα = − 12c2
qα0 . (8.10)
In this case (nonpolar continua), which is the only one we consider hereafter,Tαβ has the form
Tαβ = Xαβ +1c2
(qα0 V
β + qβ0 V
α + εc,0VαV β) (8.11)
and is summarized by the 4-velocity V α, the (spatial and symmetric) propermechanical stress tensor Xαβ , the scalar invariant proper thermal inertia1
μc,0 = εc,0/c2 and the spatial vector qα
0 of the proper thermal conduction.We note that expression (8.11) is the typical (relative) form of the energy
tensor associated with the electromagnetic scheme. Comparing the two fields,material and electromagnetic, one must assume μ0 = 0 and interpret εc,0 as theproper electromagnetic energy density, q0 as the Poynting vector and, finally,Xαβ as Maxwell’s stress tensor. However, in this formal analogy, which canbe extended to any Galilean frame with γ �= γ0 ≡ V/c, Maxwell’s energytensor has no direct counterpart in the proper mechanical stress tensor Tαβ
given by (8.4):
Tαβ = Xαβ +1c2qβ0V
α , (8.12)
rewritten here by using (8.8)–(8.10). Such a tensor, different from Xαβ, is alsononsymmetric:
T [αβ] =1c2
(qβ0 V
α − qα0 V
β) . (8.13)
Nonpolar continua are still characterized by the reciprocity axiom:
TN ·N′ = TN ′ ·N , ∀E ∈ T , ∀N,N′ ∈M4 . (8.14)
If we assume this axiom to be valid for the proper mechanical stress tensorTN also,
TN ·N′ = TN ′ ·N , ∀E ∈ T , ∀N,N′ ∈M4 , (8.15)
then Tαβ is symmetric too, like Tαβ:
Xαβ = Xαβ0 , Fαβ
0 = 0,
and, as a consequence of (8.6) and (8.10), one has again the scheme of nonpolarcontinua, without thermal conduction: q0 = 0 and Tαβ = Xαβ.1 The idea of incorporating in the tension tensor a proper energy term different
from that of pure matter μ0VαV β is due to C. Cattaneo [6].

8.3 Proper Thermodynamics of the Nonpolar Continua 267
8.3 Proper Thermodynamics of the Nonpolar Continua
For a nonpolar continuous system (8.11) and (8.3)1 imply that the 4-stresseshave the form
Tα = Xα +1c2
[V αq0 + (qα0 + εc,0V
α)V] , (8.16)
where we have used the notation
Xα def= Xαβcβ . (8.17)
Thus the proper ordinary stresses XN along N
XNdef= NαXα (8.18)
satisfy the reciprocity property
XN ·N′ = XN ′ ·N , ∀E ∈ T , ∀N,N′ ∈M4 . (8.19)
The coordinate stresses Xα as well as q0 are spatial vectors:
V ·V = −c2 , q0 ·V = 0 , Xα ·V = 0 . (8.20)
The latter condition, because of (8.19), is equivalent to XV · cα = 0 for everypossible choice of the Cartesian basis cα; hence XV = 0 implying the lineardependence of the vectors Xα:
XV = VαXα = 0 . (8.21)
Thus, when V0 �= 0, (8.21) allows us to express the coordinate stress X0 as afunction of the others:
X0 = −Vi
V0Xi . (8.22)
Moreover, introducing the total proper mass density μ0
μ0def= μ0 + μc,0 , μc,0
def=εc,0
c2, (8.23)
as a sum of pure matter inertia and thermal inertia (see (7.23)), the relativisticCauchy equation (7.9) can be written in the form
∂α
[(μ0V
α +1c2qα0
)V + Xα +
1c2V αq0
]= μ0k (8.24)
or, in scalar terms,∂αM
αβ = μ0kβ , (8.25)
where the energy tensor Mαβ has the form

268 8 Elements of Relativistic Thermodynamics of a Continuum
Mαβ = μ0VαV β +Xαβ +
1c2
(V αqβ0 + V βqα
0 ) , (8.26)
with the restrictions
V αVα = −c2 , Xαβ = Xβα , XαβVβ = 0 , qα0 Vα = 0 . (8.27)
To (8.27) one must add the boundary conditions on ∂T :
ναTα = g , (8.28)
with ν being the internal unit normal vector to the hypersurface ∂T , whichis the boundary of the world tube T . The field g should be assigned on ∂T ,corresponding to the external thermomechanical contact. However, (8.24) canbe written in intrinsic terms as we have already done in (5.46) for the caseq0 = 0 (absence of thermal conduction); performing the derivative and scalarmultiplying by V give first of all the scalar equation analogous to (7.53),
c2∂α
(μ0V
α +1c2qα0
)= −μ0k ·V −
(Xα +
1c2V αq0
)· ∂αV ,
from which we obtain the proper energy theorem
c2∂α(μ0Vα) = μ0q0 − w(i)
0 , (8.29)
where the following proper quantities (per unit proper volume) have beenintroduced:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
μ0q0def= μ0(r0 + qc,0) total thermal power,
μ0r0def= −μ0k ·V radiation thermal power,
μ0qc,0def= −
(∂αq
α0 +
1c2
q0 ·A)
conduction thermal power,
w(i)0
def= Xα · ∂αV internal forces power .
(8.30)
By substituting (8.29) into (8.24) we finally obtain the equation analogous to(7.55):
ρ0A = F0 , (8.31)
where F0 is the total proper mechanical force per unit proper volume:
F0def= μ0k− ∂α
(Xα +
1c2qα0 V +
1c2V αq0
)− 1c2
(μ0q0 − w(i)0 )V ; (8.32)
this expression reduces to the previous F0 when the additional terms due tothe thermal flux q0 are neglected. As concerns the proper power of internalforces w(i)
0 , one still has the expression (7.68): w(i)0 = Xαβκαβ ; moreover, by
introducing the proper density of internal energy ε using (7.112)

8.4 Relative Formulation 269
μ0εdef= μ0c
2 → ε = c2 + ε , εdef=
εc,0
μ0, (8.33)
the energy theorem (8.29) assumes exactly the form (7.70), valid when q0 = 0,
1μ0D0
ddτ
(μ0D0ε) = q0 −1μ0w
(i)0 , (8.34)
and represents the first law of thermodynamics in absolute terms and in theproper frame.
Finally, in order to have the same number of equations as unknowns onecan consider (8.31) and (8.34) as fundamental equations, so that, using (8.33),the following system of equations (proper formulation) arises:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
μ0
(1 +
ε
c2
) dVdτ
= F0,
dΩEdτ
= V , ||V|| = −c2,
1μ0D0
ddτ
[μ0D0
(1 +
ε
c2
)]=
1c2
(q0 −
1μ0w
(i)0
).
(8.35)
To these equations one must add the boundary conditions (8.28), the initialconditions and the equation of conservation of the proper numerical density:
∂α
(1D0
V α
)= 0 . (8.36)
According to this point of view (i.e. choosing E, V, μ0 and D0 as fundamentalvariables), in order to have the same number of equations as unknowns wemust specify all the sources; that is, not only the external fields k and g, withtheir thermomechanical content, but also the law of the 4-tensions Tα, i.e.Xα, q0 and ε. Obviously, Xα, q0 and ε will depend, a priori, on the samevariables appearing in the law of Tα: E, V, μ0 and D0: this is the so-calledequipresence principle [7].
8.4 Relative Formulation
The system of absolute equations (8.35) and (8.36) plays a central role be-cause of its invariance property with respect to the choice of the Cartesiancoordinates xα (α = 0, 1, 2, 3). However, the (three-dimensional) physical con-tent of this system is not evident, because all the involved quantities are notdirectly measurable (unless the observer’s frame would coincide with the localrest frame of the continuum). To see such a content one has to consider in-stead the corresponding formulation relative to an arbitrary Galilean frame.As in the case q0 = 0 previously examined the following three steps are thennecessary:

270 8 Elements of Relativistic Thermodynamics of a Continuum
1. select arbitrarily in C+3 the temporal direction γ characterizing the frame
and decompose, locally, all the various tensorial quantities along γ andthe normal hyperplane Σ;
2. define the various relative quantities, either from the (formal) mathemat-ical point of view or from a more physical point of view;
3. derive the transformation laws of all the involved relative quantities underan arbitrary change of the frame.
Let us start by examining (8.24); for the sake of brevity we assume thatthe Cartesian coordinates xα are adapted to the chosen frame: c0 = γ. Firstof all we note that, as for the ordinary case q0 = 0, the proper stresses Xα
are not all independent, because of (8.22); in fact, using the decompositionV = η(e + cγ) with e = e(t, x) the Eulerian velocity, we have
X0 =1ceiXi . (8.37)
The three vectors Xi can be further decomposed as follows:
Xi = φi −Xi · γγ ,
with φi ∈ Σ. Hence, using (8.20)3, i.e. Xi · e + cXi · γ = 0, one gets
Xi = φi +1cφi · eγ , (8.38)
so that, combining (8.37) and (8.38), we have that the mechanical stressesXα (α = 0, 1, 2, 3) are well-determined functions of e, γ and the three vectorsφi:
Xα =(δαi +
1ceiδ
α0
)(φi +
1cφi · eγ
). (8.39)
We call φi (i = 1, 2, 3) the coordinate mechanical stresses relative to γ (sothat φn = niφ
i is the stress relative to n ∈ Σ). They belong to Σ and canalso be written as
φi = X ikck . (8.40)
The tensorX ik, which is spatial (being the complete spatial projection ofXαβ)and symmetric in the considered frame, gives rise to the Eulerian tensioncharacteristics. Similarly, the proper thermal conduction vector q0 can bedecomposed in the form q0 = q− q0 · γγ, so that (8.20)2 implies
q0 = q +1cq · eγ . (8.41)
The spatial vector q ∈ Σ is called relative thermal conduction vector; it van-ishes if and only if q0 = 0.
Let us now project (8.24) on Σ and along γ starting from the term∂α(ρ0V
αV). Using the decomposition of V: V = η(e + cγ), and definingas in the ordinary case (q0 = 0)

8.4 Relative Formulation 271
ρdef= η2ρ0 , (8.42)
we have the following decomposition:
∂α(ρ0VαV) =
1D
[(ρDe). + (ρD).cγ] ,
where ( ). denotes the substantial derivative:
( ). = ∂t( ) + ei(t, x)∂xi( ) , (8.43)
and the Eulerian kinematical identity
D
D= div e , (8.44)
has been used.Similarly, from (8.39) we have
∂αXα = ∂iφi +
1c∂i(φi · e)γ +
1c2∂t(eiφ
i) +1c3∂t(eiφ
i · e)γ .
Using then (8.43) and (8.44) leads to
∂α(V αq0) = (ηq0). + ηq0∂iei ≡ 1
D(ηDq0). ;
(8.41) implies
∂α(V αq0) =1D
(ηDq). +1cD
(ηDq · e). γ .
Finally we have
∂α(qα0 V) = ∂i(ηqie) +
1c2∂t(ηq · ee) + c∂i(ηqi)γ +
1c∂t(ηq · e)γ .
Next, after introducing the relative mass force μF
μF def= μ0kΣ ≡ μ0(k + k · γγ) , (8.45)
(8.24) gives the momentum theorem
1D
(μDe). = F def= F + Fc , (8.46)
where the total force density F includes, besides the ordinary term F (see(7.78)), the contribution due to the thermal flux Fc:⎧⎪⎪⎨
⎪⎪⎩F def= μF− ∂iφ
i − 1c2∂t(eiφ
i),
Fcdef= − 1
c2
[1D
(ηDq). + ∂i(ηqie) +1c2∂t(ηq · ee)
].
(8.47)

272 8 Elements of Relativistic Thermodynamics of a Continuum
The energy theorem is then given by
1D
(μDc2). = −μ0ck · γ − ∂i(φi · e)− 1c2
[1D
(ηDq · e).
+∂t(eiφi · e) + ∂t(ηq · e)
]− ∂i(ηqi) .
In contrast to (8.46), the above equation is not in a physically meaningfulform yet; this form can be obtained by using the relation −cγ = e−V/η andexpanding the derivatives on the right-hand side. In fact, using the identity
e2 = c2(
1− 1η2
), (8.48)
and introducing the following relative quantities per unit volume:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
μεdef= μc2 internal energy,
μrdef= −1
ημ0k ·V radiation power,
μqcdef= −1
η∂iq
i − 1c2
[1η∂t(q · e) + ηq · e
]conduction power,
w(i) def= φi ·(∂ie +
1c2ei∂te
)internal forces power ,
(8.49)we can write the energy theorem in its more familiar form:
1μD
(μDε). = F · e + Q , (8.50)
where Q is the total thermal power:
Qdef= q − 1
μw(i) , q
def= r + qc . (8.51)
8.5 Transformation Laws of the FundamentalRelative Quantities
The general equations (8.46) and (8.50) satisfy the relativity principle, sincethey are formally invariant with respect to the choice of the Galilean frameassociated with the vector γ. However, they are not physically invariant, be-cause of the relative meaning of the various quantities involved.
All the quantities introduced above, and in particular ε, r, qc and w(i), havea real physical meaning. If we denote by an index 0 the proper quantities, thefollowing properties of invariance hold:

8.5 Transformation Laws of the Fundamental Relative Quantities 273
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
ε =μ0c
2
μ0,
η3r = −k ·V = inv. = r0,
η3qc = − 1μ0
(∂αq
α0 +
1c2
q0 ·A)
= inv. = qc,0,
ηw(i) = Xα · ∂αV = w(i)0 ,
(8.52)
which complete (7.82), by the inclusion of the thermal flux. Hence, as in theordinary case, the transformation laws of the quantities r, qc and w(i), passingfrom one Galilean frame Sg to another S′
g, easily follow:
r′ =(ασ
)3r , q′c =
(ασ
)3
qc , w′(i) =(ασ
)w(i) . (8.53)
Analogously, for the mass forces and the coordinate stresses (see (8.38) and(8.45)) the transformation laws are exactly those of the ordinary case (q0 = 0),that is, (7.85) and (7.99):
⎧⎪⎪⎨⎪⎪⎩
F′ =α
σ2
[αF− 1
c2(F ·w + r)u
],
φ′i =(δik −
1c2α
uiwk
)(φk − 1
c2αφk ·wu
), (i = 1, 2, 3),
(8.54)
where the dependence on the Eulerian velocity e is either through the scalarσ = 1− e · u/c2 or through the vector w:
w = e− u1 + α
. (8.55)
Finally, for the thermal conduction vector q, from (8.42) we have
q′ = q− 1c2α
q ·wu . (8.56)
Using then the relativistic theorem of addition of velocities
e′ =1σ
(αe− α+ σ
1 + αu), (8.57)
we also have the following transformation law for the vector w:
w′ =α
σw . (8.58)
Equation (8.54)1 shows that, from a relativistic point of view, the cases q = 0(absence of thermal conduction) and r = 0 (absence of thermal radiation) areallowed. On the other hand, a pure heat theory (in the absence of a mechanical

274 8 Elements of Relativistic Thermodynamics of a Continuum
interaction) is meaningless; in fact, F = 0 in Sg does not imply F′ = 0 in S′g,
but ratherF′ = − α
σ2ru �= 0 .
In the classical case (c → ∞) the situation is obviously different, all thequantities introduced above having an invariant meaning with respect to thechoice of the Galilean frame. Furthermore, most of the relations decouple andgive rise to the ordinary theories.
8.6 Classical Form of the Relativistic Cauchy Equation
The relativistic equation (8.46) contains the various nonclassical terms, whichappear on both sides and generate a thermodynamical coupling, absent in theordinary theory of continuous systems. However, if we use (8.44), (8.46) thenassumes the typical conservative form:
∂t(μe) + ∂i(μeei) = F , (8.59)
similar to the absolute equation from which it is derived. To this equation,in general, one should not couple the mass conservation equation, differentlyfrom the classical case. Taking into account the meaning (8.42) of μ, it isconvenient to separate the pure matter term (μ = η2μ0) from that relatedto the thermal conduction (μc = η2μc,0) by introducing the thermal energydensity ε, already used in (8.33):
με = μcc2 ; (8.60)
(8.42) then assumes the form
μ = μ(1 +
ε
c2
), (8.61)
where ε is a scalar invariant. The decomposition (8.61) can also be used in themotion equation (8.59), showing the thermodynamical coupling through thethermal energy ε, which represents a strictly relativistic result. Clearly, whenq �= 0 the vector Fc, given by (8.47)2, is a coupling term too.
A first alternative form to (8.59) can be obtained by taking into account(8.47)1, which gives the equivalent expression:
∂
∂t
(μe +
1c2ekφ
k
)+
∂
∂xi
[(μe +
1c2ekφ
k
)ei
]
= μF− ∂
∂xi
(φi − 1
c2eiekφ
k
)+ Fc .
The latter equation suggests the introduction of the coordinate dynamicalstresses:

8.6 Classical Form of the Relativistic Cauchy Equation 275
φi def= φi − 1c2eiekφ
k , (8.62)
which, both in the classical approximation (c→∞) and in the proper framee = 0, coincide with the ordinary stresses φi. The vectors φi are in 1–1correspondence with the φi; in fact, from (8.62) and using (8.48) one has
eiφi =
1η2ekφ
k , (8.63)
so that
φi = φi +η2
c2eiekφ
k. (8.64)
Therefore, the previous equation, at least in the case q = 0, expresses theclassical form
∂P∂t
+∂
∂xi(Pei) = μF− ∂φi
∂xi, (8.65)
where P represents the total linear momentum per unit volume:
P def= μ(1 +
ε
c2
)e +
η2
c2eiφ
i . (8.66)
The conservative form (8.65), typical of the classical situation, is still validin the relativistic case when q = 0, with a larger meaning due to both themechanical sources (dynamical stresses φ
iin place of ordinary stresses φi)
and the newly defined linear momentum, with the addition of the two termsrelated to the internal energy ε and to the dynamical stresses φ
i. Moreover,
the conservative form (8.65) remains valid also in the presence of thermal fluxq. In fact, by introducing the dynamical thermal conduction q, through thesame law (8.62):
q def= q− 1c2
q · e e ∼ q = q− η2
c2q · e e , (8.67)
the additional mechanical force Fc given by (8.47)2 assumes the followingform:
Fc = −[∂Pc
∂t+∂ (Pc e
i)∂xi
+∂φ
i
c
∂xi
],
where
Pcdef=
1c2
(ηq +
2η3
c2q · ee
), φ
i
cdef=
η
c2qie . (8.68)
Thus, in the general nonpolar case with q �= 0, the relativistic Cauchy equationretains its classical form (8.65):
∂P∂t
+∂
∂xi(Pei) = μF− ∂φi
∂xi, (8.69)

276 8 Elements of Relativistic Thermodynamics of a Continuum
where the total linear momentum P and the total stresses φi also include,besides the ordinary contributions P and φi, the thermal terms Pc and φi
c:⎧⎪⎪⎨⎪⎪⎩
P def= P + Pc ≡ μe +1c2
(μεe + η2ekφ
k + ηq +2η3
c2q · ee
),
φi def= φi + φic ≡(δik −
1c2eiek
)(φk +
η
c2qke).
(8.70)
In particular, neglecting terms of higher order in 1/c2, (8.70) give the approx-imate expressions:
⎧⎪⎨⎪⎩
P � μe +1c2
(μεe + ekφ
k + q),
φi � φi − 1c2
(eiekφk − qie).
(8.71)
8.7 Transformation Laws of the Dynamical Stresses
Let us consider the relation (8.62) between the ordinary stresses φi and thedynamical ones φi rewritten in the form
φi def=(δik −
1c2eiek
)φk ≡ gi
kφk , (8.72)
through the introduction of the Eulerian tensor
gik def=(δik − 1
c2eiek
), (8.73)
i.e. a (regular) spatial tensor such that
det||gik|| = 1gη2
> 0 , (8.74)
with reciprocal tensor gik (denoted by the same symbol):
gik = δik +η2
c2eiek , gikgkj = δi
j . (8.75)
The two tensors gik and gkj depend on the choice of the Galilean frameSg, and hence have a relative meaning. In the proper frame (e = 0) theycoincide with the spatial metric, a fact that will allow us to better specifytheir geometrical meaning. It is easy to see that, passing from Sg to S′
g, thefollowing transformation laws hold:
g′ik = AijA
khg
jh; g′ik = BjiB
hkgjh , (8.76)

8.7 Transformation Laws of the Dynamical Stresses 277
where the matrices
Aik
def= δik +
1c2σ
wiuk , Bik
def= δik −
1c2α
wiuk (8.77)
satisfy the relation AikB
kj = δi
j (see Chap. 5). We also note that, because of(8.58) and the reciprocity theorem of the velocities
u′ = −u , (8.78)
the tensors A and B given by (8.77) are not only inverse to each other, butcan also be transformed from one to the other:
B′ik = Ai
k . (8.79)
Let us now consider the transformation law of the ordinary stresses (8.54)2:
φ′i = Bki
(φk − 1
c2αφk ·wu
); (8.80)
using (8.76) leads to
φ′i ≡ g′ikφ
′k = AijAk
hgjhBl
k
(φl − 1
c2αφl ·wu
)
= Aijδ
hl g
jh
(φl − 1
c2αφl ·wu
),
so that
φ′i = Ai
j
(φ
j − 1c2α
φj ·wu
). (8.81)
If we decompose the vectors φi
along the Cartesian basis, that is
φi = X ikck , (8.82)
it is easy to find the relation with the nonsymmetric tension characteristics:
X ik = gihX
hk ≡ X ik − 1c2eiehX
hk . (8.83)
Moreover, (8.81) implies:
X ′ik = AijX
hkBhk , (8.84)
that is, the two (different) nonsymmetric tensors X ′ik and X ik have in Sg
the same principal invariants. The same property is no longer true for theordinary characteristics X ik, given by (8.40); in fact, the latter are symmetricand transform as follows (see (8.54)2):
X ′ik = BijX
jhBhk . (8.85)

278 8 Elements of Relativistic Thermodynamics of a Continuum
8.8 Nonviscous Fluids and Dynamical Pressure
The introduction of the dynamical stresses (8.62) in a given Galilean frameSg implies a relativistic consistence for the hypothesis of a pure pressure:
φi = pci ∼ Xik = pδik ; (8.86)
in fact, using (8.81), we find φ′i
= p′c′i, ∀S′g, and hence such hypothesis is
invariant with respect to the choice of the Galilean frame. The scalar p has themeaning of proper pressure of the fluid, and this is a different way to definenonviscous fluids. The hypothesis (8.86), using (8.64) and (8.75), is indeedequivalent to the condition that the ordinary stresses φi have the form
φi = pgikck ∼ X ik = pgik , (8.87)
implying that in the proper frame there is no proper viscosity:
φi0 = p0δ
ikck . (8.88)
In fact, consider (8.54)2 and specialize Sg to be the proper frame S0. Thuse = 0 and, from (8.57), for a fluid element at rest in S0:
e′ = −u . (8.89)
After multiplying by ni and using the reciprocity axiom, (8.54)2 assumes theform:
φ′n = φ0
n +1c2
1α(1 + α)
(u · nφ0u + φ0
u · nu) +u · n
c4α2(1 + α)2φ0
u · uu .
Replacing u through (8.89) and omitting the prime for the sake of brevitylead to the following dependence between ordinary proper stresses and thoserelative to an arbitrary Galilean frame Sg:
φn = φ0n + Δφn , (8.90)
where
Δφn =1c2
η2
1 + η
[φ0
e · ne + e · n(φ0
e +η2
c2(1 + η)φ0
e · ee)]
. (8.91)
Equation (8.90) shows that in a relativistic context it is necessary to distin-guish between static and dynamical stresses; that is, in any Galilean frame Sg
the stresses depend on the dynamical state of the fluid element (apart fromother conditions) φn = φn(e,φ0
n), different from what happens classically.We notice that for any direction n orthogonal to e the relativistic correction
to the ordinary stresses Δφn is always parallel to the velocity e and it is alinear and homogeneous function of φ0
e = eiφi.

8.9 Lagrangian Form of the Relativistic Cauchy Equation 279
Let us assume the continuum to be a nonviscous fluid, that is, from (8.87):
φ0n = p0n , ∀n ∈ Σ0 . (8.92)
From (8.90) we then have
φn = p0
[n +
η2
c2(1 + η)e · n(
2 +η2
1 + η
e2
c2
)e]
= p0
(n +
η2
c2e · ne
).
(8.93)Equation (8.92) implies the following form of coordinate stresses in anyGalilean frame Sg:
φi = p0
(ci +
η2
c2eie)
= p0gikck , (8.94)
which is not compatible with a pure pressure; such a compatibility concernsinstead the dynamical stresses φi = p0ci only, confirming the equivalencebetween (8.86) and (8.92).
8.9 Lagrangian Form of the Relativistic Cauchy Equation
As we have seen above, the relativistic Cauchy equation (8.69) has been de-rived using Eulerian coordinates. We will proceed now to transform it in itsLagrangian form [4]. To this end, let us assume for the continuum a genericset of Lagrangian coordinates yi (i = 1, 2, 3), i.e. curvilinear coordinates forthe points in the actual configuration C. Let {ei} denote the natural basisassociated with the coordinates yi in C ∈ Sg and gik = ei · ek the Lagrangianmetric with associated Christoffel symbols of the second-type Γh
ik and thecovariant derivative ∇i.
The partial derivatives (spatial and temporal) of the basis vectors {ei}(and similarly for the cobasis {ei}) give the following geometrical–kinematicalrelations:
∂iek = Γhikeh , ∂tei = ∂iv ,
(∂i =
∂
∂yi, ∂t =
∂
∂t
), (8.95)
where v = viei denotes the Lagrangian velocity. The velocity gradient ∇ivk
summarizes, in turn, the two fundamental tensors: ωik (angular velocity) andkik (deformation velocity):
∇ivk = ωik + kik , vk = gkivi . (8.96)
The symmetric tensor kik:
kikdef=
12(∇ivk +∇kvi) , (8.97)

280 8 Elements of Relativistic Thermodynamics of a Continuum
can also be written askik =
12∂tgik ; (8.98)
the antisymmetric tensor ωik is instead equivalent to the vector
ω =12ei × ∂tei =
12curlv , (8.99)
where ei is the dual basis of ei: ei · ek = δik and
ω =12ωikei × ek , ωik = ω · ei × ek . (8.100)
The Lagrangian form of (8.69) requires the introduction of the Lagrangiancoordinate static stresses Yi or the dynamical ones Yi:
Yi =∂yi
∂xkφk , Yi =
∂yi
∂xkφk . (8.101)
Moreover, we have the following: (1) the left-hand side of (8.69) can be ex-pressed using the substantial derivative (8.43), which in Lagrangian terms isexactly the temporal derivative ∂t; (2) for the vectors φi, in Lagrangian terms,one still has the ordinary expression for the divergence:
∂φi
∂xi=
1D∂i(DYi) , D =
√g . (8.102)
Using (8.101)1, we find
∂φi
∂xi=
∂
∂xi
(∂xi
∂ykYk
)
=∂
∂yh
(∂xi
∂ykYk
)∂yh
∂xi= ∂hYk ∂x
i
∂yk
∂yh
∂xi+ Yk ∂2xi
∂yh∂yk
∂yh
∂xi.
Next, using the relations
∂yh
∂xi
∂xi
∂yk= δh
k ,∂2xi
∂yh∂yk
∂yh
∂xi= Γl
hk, Γhhk =
1D∂kD (8.103)
leads to∂φi
∂xi= ∂kYk + Γh
hkYk ≡ 1D∂k(DYk) .
Thus, (8.69) cast in Lagrangian form becomes
1D∂t(DP) = μF− 1
D∂i(DYi) , (8.104)
where we have the linear momentum and the generalized stresses given by(8.62) and (8.70):

8.10 Lagrangian Form of the Power of the Internal Forces 281
⎧⎪⎨⎪⎩
P def= μv +1c2
(μεv + η2viYi + ηq +
2η3
c2q · vv
),
Yi def= Yi +η
c2qiv,
(8.105)
where
Yi = gikYk , qi = gi
kqk , gi
k = δik −
1c2vivk . (8.106)
As in the classical case, (8.104) can be written in scalar terms in a number ofways, according to the stress characteristics and the bases used. For instance,assuming
Yi = Y ikek , Yi = Y ikek , (8.107)
it is possible to introduce the dynamical tension characteristics Y ik:
Y ik = gijY
jk ; (8.108)
these are not symmetric, different from the corresponding Eulerian quantitiesX ik given by (8.82). With this choice and using (8.95), (8.104) becomes
1D∂t(DPk) + Ph∇hv
k = μF k −∇hYhk , (8.109)
that is∂tPk = μF k −∇hY
hk − kPk − Ph(ωhk + kh
k) , (8.110)
where k def= gikkik is the cubic deformation velocity. Equation (8.110), using(8.105), determines the acceleration a as a function of the sources and pavesthe way to the intrinsic formulation of the mechanics of relativistic continua,although the nonsymmetric character of Y ik makes (8.109) not familiar.
8.10 Lagrangian Form of the Powerof the Internal Forces
In order to complete the Lagrangian formulation, we have to transform thepower of the internal force given by (8.49)4. In Eulerian terms, we have
w(i) = X ikkik ∼ w(i) = φi · (∂te +1c2ei∂te) , (8.111)
where
kik ≡ kik +1
2c2
(ei∂ek
∂t+ ek
∂ei
∂t
)(8.112)
and kik is the ordinary deformation tensor:
kik =12
(∂ek
∂xi+∂ei
∂xk
). (8.113)

282 8 Elements of Relativistic Thermodynamics of a Continuum
The temporal derivative of e can be cast in Lagrangian form taking intoaccount that, for any Eulerian quantity, (8.43) holds:
∂t( ) = ( ). − ei∂i( ) .
Thus, using (8.101)1, (8.111)2 becomes
w(i) = Yi ·[∂iv +
1c2vi(∂tv − vk∂kv)
],
that is
w(i) = Y ik
[∇ivk +
1c2vi(∂tv · ek − vh∇hvk)
].
Moreover, because of the identity
∂tv · ek = ∂tvk − v · ∂kv ,
we find
w(i) = Y ik
{∇ivk +
1c2vi[∂tvk − vh(∇kvh +∇hvk)]
}.
The symmetry of the tension characteristics (either Eulerian, X ik orLagrangian, Y ik) then implies
w(i) = Y ik
[kik +
1c2vi(∂tvk − 2vhkhk)
], (8.114)
so that, using (8.98),
w(i) =12Y ik
[∂tgik +
2c2vi(∂tvk − vh∂tghk)
]. (8.115)
This expression immediately gives the classical limit of w(i):
limc→∞ w(i) =
12Y ik∂tgik ,
and it can be further transformed in order to have a single temporal derivative;in fact, the last term can be written as vh∂tghk = ∂tvk − ghk∂tv
h, so that
w(i) =12Y ik
(∂tgik +
2c2vighk∂tv
h
). (8.116)
Introducing now the covariant form of the tension tensor
Ylh = Y ikgilgkh (8.117)
and using the identity

8.10 Lagrangian Form of the Power of the Internal Forces 283
Ylh∂tglh = −Y ik∂tgik ,
we finally get
w(i) = −12Yik∂tg
ik , (8.118)
where the tensor gik has been introduced in (8.106)3:
gik = gik − 1c2vivk . (8.119)
Summarizing, while expressions (8.115) and (8.118) for the power of the in-ternal forces (expressed in terms of gik and gik, respectively) are equivalentin the classical case, in relativity only (8.118) assumes a fundamental role,giving w(i) as a differential form in the variables gik (for each element of thecontinuum, i.e. for fixed yi).
Another useful expression for w(i) in terms of the dynamical stress variablesY ik can easily be obtained:
Y ik def= gij g
khY
jh ≡ gij gkhYjh . (8.120)
Y ik are symmetric, different from the Y ik given by (8.107) and have a4-degree polynomial form in the Lagrangian velocities vi. In fact, using theinverse relations we have
Yjh = gjighkYik , (8.121)
where the tensor gik has been defined in (8.75):
gik = gik +η2
c2vivk ; (8.122)
thus, (8.118) can also be written as
w(i) =12Y ik∂tgik . (8.123)
Obviously, both (8.118) and its counterpart (8.123) are formally invariant withrespect to the choice of the Galilean frame and are also in agreement with thetransformation law (8.53)3; in fact, in Lagrangian terms, for each element ofthe continuum we have
∂t′ =η
η′∂t ≡
α
σ∂t . (8.124)
We notice that w(i) vanishes in Sg (and hence in every S′g) only for motions
satisfying the conditions
kik ≡12∂tgik = 0 ; (8.125)
these are the so-called rigid motions in the sense of Born, already seen inChap. 5. More precisely, consider the Minkowski metric mαβ and the associ-ated natural decomposition in Sg along γ:

284 8 Elements of Relativistic Thermodynamics of a Continuum
mαβ = mαβ − γαγβ , mαβγβ = 0 .
Comparing this form with the corresponding absolute one, along V,
mαβ = m0αβ −
1c2VαVβ , m0
αβVβ = 0 ,
we have, irrespective of the choice of the coordinates,
m0αβ = mαβ +
1c2VαVβ − γαγβ .
Thusm0
αβ = mαβ +η
c
(eαγβ + eβγα +
η
ceαeβ
), (8.126)
and the total spatial part of the proper metric m0αβ turns out to be given by
m0αβ = mαβ +
η2
c2eαeβ ; (8.127)
in coordinates adapted to Sg, it coincides with the spatial Eulerian tensor:
m0ik = δik +
η2
c2eiek ≡ gik . (8.128)
These relations specify the geometrical meaning of the Eulerian tensor gik,i.e. the proper spatial metric, induced in the space Σ of Sg; moreover, thecondition (8.125) has an absolute meaning and implies (in Sg) the vanishingof the proper deformation velocity: k0
ik = 0.Therefore in relativity the local deformation compatible with the vanishing
of the power of the internal forces is not related to the ordinary rigid motion,but to the Born-rigid one.
8.11 Energy Theorem and First Law of Thermodynamics
Equation (8.50) confirms the classical interpretation of the first law of thermo-dynamics as a substitute for the energy theorem [8]. To see this, it is enoughto eliminate from (8.50) the mechanical power F · e by using the relativisticCauchy equation (8.46); in fact, after multiplying this equation by e and using(8.49), we have
μF · e =1D
(μD).e2 +12μ(e2).
=1D
(μDc2). − 1Dη2
(μDc2). +1η3μc2η ;

8.11 Energy Theorem and First Law of Thermodynamics 285
using (8.49)1, (8.50) then becomes
1Dη2
(μDc2). − 1η3μc2η = μq − w(i) ,
and using (8.52)2,3,4 as well as the relation Dη = D0:
η2
D0(μDc2). − μc2η = μq0 − η2w
(i)0 .
This equation, due to (8.42) and the similar relation μ = η2μ0, coincides with
η(μ0D0c
2).
D0= μ0q0 − w(i)
0 ,
which, because of the Eulerian identity
η( ). = V α∂α( ) ≡ ddτ
( ) , (8.129)
reduces to the first law of thermodynamics (8.34). The latter, in turn, coincideswith the energy theorem (8.50), as follows studying it in the proper Galileanframe of the generic element of the continuum. In fact, using the Eulerianidentity (8.36)
1D0
dD0
dτ= ∂αV
α , (8.130)
we find the conservation law of the total proper internal energy (8.29):
∂α(μ0εVα) = μ0q0 − w(i)
0 . (8.131)
We can also write (8.131) in the Eulerian form:
∂E∂t
+∂
∂xi(Eei) ≡ 1
D(DE). = η(μq − w(i)) , (8.132)
where E is the relative internal energy density for both pure matter and ther-mal energy density:
E def=1ημc2 ≡ 1
η(μc2 + με) . (8.133)
As we have already seen in the case of the relativistic Cauchy equation, (8.132)can be conveniently rewritten, enlarging the energetic content of E . In fact,because of (8.67), (8.49)3 can be written in the form
−μqc =1η
∂qi
∂xi+
1c2η
[∂
∂t(q · e) +
∂
∂xi(q · eei)
− ∂
∂xi(q · eei) + η2(q · e)
]
=1η
∂qi
∂xi+
1c2η
[∂
∂t(q · e) +
∂
∂xi(q · eei) + η2(q · e)
]

286 8 Elements of Relativistic Thermodynamics of a Continuum
or
−μηqc =∂qi
∂xi+
1c2
[∂
∂t(η2q · e) +
∂
∂xi(η2q · eei)
+η2(q +η2
c2q · ee) · e
].
Now, by using the identity
e · e =c2
η3η , (8.134)
we obtain the following expression for qc:
− μηqc =∂qi
∂xi+
1c2
[∂
∂t(η2q · e) +
∂
∂xi(η2q · eei) + ηq · (ηe).
]. (8.135)
Hence, (8.132) turns out to be equivalent to
∂E∂t
+∂
∂xi(Eei) = Q , (8.136)
where the energy density E includes also thermal conduction:
E def= E +1c2η2q · e ≡ μc2
η
(1 +
ε
c2
)+
1c2
q · e , (8.137)
and the total source Q has the form
Qdef= η(μr − w(i))− ∂qi
∂xi− η
c2q · (ηe). . (8.138)
We note that the last term in the expression for Q is genuinely relativistic, anddepends on the relative acceleration e; hence, the first law of thermodynamicsis coupled with the Cauchy equation and this is a novelty with respect to theclassical situation.
Moreover, one immediately finds the Lagrangian form of (8.136) as well asthat of the quantities E and Q, given by (8.137) and (8.138). The Euleriandifferential system (8.69) and (8.136):
⎧⎪⎪⎨⎪⎪⎩
∂P∂t
+∂
∂xi(Pei) = μF− ∂φi
∂xi,
∂E∂t
+∂
∂xi(Eei) = Q,
(8.139)
with the general content specified in (8.70), (8.137) and (8.138), is formallyinvariant with respect to the choice of the Galilean frame; it gives four (conser-vative) scalar equations in the same number of unknowns: μ and e; these arethe general equations of the thermodynamics of nonpolar relativistic continua

8.12 Finite Deformations in Relativity. Isotropic Systems 287
and need the sources as well as the associated initial and boundary conditionsto be assigned.
For a single mass point the sources are reduced to the 4-force only, whichsummarizes the mechanical and thermal action. For a continuum, instead, be-sides the mass 4-force (with the quantities F and r) there are the 4-stresseswhich, from a relative point of view, give rise to the mechanical stress andthe internal energy together with the thermal conduction vector. Thus, takinginto account (8.62), (8.67), (8.70)2 and (8.138), (8.139) should be completed(apart from initial and boundary conditions) assigning the functional depen-dence of the various quantities, as in the classical case: F and r for the external(volume) force, 2 φi, ε and q3 as concerns the constitutive behaviour of the sys-tem. These sources require the equipresence principle as a direct consequenceof their absolute nature; moreover, at least in the case considered here, thesources are a priori free. One must then take into account the invariant prop-erties of the sources and specify the state variables on which they depend;these can partially be suggested by the Lagrangian expression (8.118) for thepower of internal forces.
8.12 Finite Deformations in Relativity. Isotropic Systems
The theory of finite deformations [9] with the associate typical tensors(Cauchy–Green, pure deformation, local rotation, etc.) can be extended inrelativity. Assume a reference kinematical state (C∗,v∗) characterized by theconfiguration C∗ and the velocity field v∗ to be arbitrarily fixed in the chosenGalilean frame Sg. We will denote by a “∗” all the quantities relative to thereference configuration C∗ and without the “∗” all those associated with theactual configuration C corresponding to the motion of the continuum.
For the generic element of the continuum, besides the tensor gik (given by(8.119) and representing the proper spatial metric at the coordinate time t),we can consider the one associated with the reference configuration C∗:
gik∗ = gik
∗ −1c2vi∗v
k∗ . (8.140)
Then the following definition of direct and inverse deformation character-istics is quite natural passing from the configuration C∗ to C:
⎧⎪⎨⎪⎩εik∗
def=12(gik − gik
∗ ) ≡ εik∗ −1
2c2(vivk − vi
∗vk∗ ),
εikdef=
12(gik
∗ − gik) ≡ εik − 12c2
(vi∗v
k∗ − vivk).
(8.141)
2 In the boundary conditions the analogous surface sources also appear.3 A priori, in the scheme both the temperature and the heat equation do not appear.
A brief discussion concerning these aspects will be outlined when discussing theCauchy problem.

288 8 Elements of Relativistic Thermodynamics of a Continuum
Equation (8.141) refer to Lagrangian coordinates but it can also be easilyadapted to Eulerian coordinates. The covariant form of the deformation ten-sors is naturally defined as follows:
⎧⎪⎨⎪⎩ε∗ik
def=12(gik − g∗ik) ≡ ε∗ik +
12c2
(η2vivk − η2∗v
i∗v
k∗ ),
εikdef=
12(g∗ik − gik) ≡ εik +
12c2
(η2∗v
i∗v
k∗ − η2vivk).
(8.142)
Similar to the classical case [4], the invariants of the direct deformation, withrespect to the metric g∗ik or g∗ik, are functions of the invariants of the inversedeformation with respect to the metric gik or gik. But, actually, the mixedforms of the deformation tensor which can be considered are four:
ε∗ij g∗kj , εij gkj , ε∗jkg∗ij , εjkgij , (8.143)
and are not all independent:
ε∗ij g∗kj = εjk gkj , εjk
∗ g∗ij = εij gjk .
We can choose, for instance, the first of the mixed forms in (8.143) and intro-duce the notation
ε∗ik = ε∗ij g∗kj , εik = εjkg
ij , (8.144)
so that ε∗ik = εik.
In order to build up a relativistic theory of finite deformations one has toconsider in C and C∗ the induced proper metrics gik and gik∗ instead of thenatural metric gik or g∗ik. The conditions v2 < c2 and v2
∗ < c2 ensure thatboth these are proper Euclidean metrics.
The classical definition of isotropy [4, 8] can be extended in relativity asfollows. The continuum C is isotropic,4 with respect to the kinematical status(C∗,v∗) of Sg, if for each motion and at each instant the symmetric tensorsYik and εik (or εik) admit the same principal directions with respect to themetric gik (or gik), for all E ∈ T .
The above condition is equivalent to the existence of constitutive relationslike [10]
Y ik ≡ gijYjk = pδi
k + qεik + rεij εjk , (8.145)
where p, q and r are scalar invariants.5 Isotropic systems are then character-ized by the condition that, once a certain kinematical state is fixed (local or4 For the sake of simplicity, we will assume that there always exists an isotropic
state corresponding to a planar spatial section of the world tube T . This requires apreferred Galilean frame, in which the status of the system is considered at certaininstant. However, the isotropic state for the continuum has a local meaning andit corresponds in general to a curved section of T : in this case the meaning ofinstantaneous configuration is lost.
5 Products of more that two matrices εij can always be expressed in terms of these
quantities by using the Hamilton–Cayley identity.

8.13 Continua Without Material Structure 289
global, necessary to evaluate the finite deformations), the Lagrangian tensorof the dynamical stresses Y i
k is a quadratic function of the mixed deformationtensor εik in briefly, an isotropic function.
Similarly, pulling back Y ik to the isotropic configuration C∗ and using the
identity εik = ε∗ik the quadratic relation (8.145) becomes
Y ik = pδi
k + qε∗ik + rε∗i
j ε∗jk . (8.146)
Lowering then, in (8.146), the index i with the metric gik:
gik = g∗ik + 2ε∗ik , (8.147)
and using the Hamilton–Cayley identity for the last term of (8.146), one ob-tains the Lagrangian characteristics Yik ≡ gij Y
jk in terms of direct deforma-
tions:Yik = P g∗ik +Qε∗ik +Rε∗ij ε∗hkg∗jh , (8.148)
where P , Q and R are functions of p, q and r, and of the direct (or inverse)deformation invariants.
As in the classical case, nonviscous fluids are included in (8.145) in thecase of vanishing q and r. We notice that the hypothesis of isotropy (8.145),formulated directly in Sg, has an invariant meaning with respect to the choiceof the Galilean frame. In fact, the covariant tensors Yik, gik and εik have thesame transformation laws (see (8.85) and (8.77)2); thus, (8.145), invariantwith respect to the choice of the Lagrangian coordinates, becomes
Yik = pgik + qεik + rεij εhkgjh ; (8.149)
it has an absolute meaning and can then be examined from a relative pointof view.
8.13 Continua Without Material Structure
An interesting reduced scheme is that of a continuum without internal struc-ture, corresponding to the classical scheme of a mass conservation system. Aswe have already seen, in the case q = 0 we have the proper mass conservationlaw:
V α∂α(μ0D0) = 0 , (8.150)
i.e. the absolute property
μ0D0 ≡μD
η= const. , (8.151)
valid for each element of the continuum, with the meaning that the properdensity of proper mass μ0 is proportional to the proper numerical density1/D0.

290 8 Elements of Relativistic Thermodynamics of a Continuum
In this case, the sources are not completely free; in fact, (8.131), because of(8.33), assumes the form
(c2 + ε)∂α(μ0Vα) + μ0
dεdτ
= μ0q0 − w(i)0 , (8.152)
which, using (8.129), gives rise to the following restriction:
μ
ηε = η(μq − w(i)) . (8.153)
This is the relativistic form of the first law of thermodynamics; it involvesthe sources ε, r, q and the Lagrangian tension characteristics Y ik through thepower of the internal forces. Equation (8.152) suggests the following definitionof systems undergoing reversible transformations, motivated by the classicalcase, as those systems for which there exists a function of state (like ε) calledthe proper entropy s, such that for each transformation of the continuum
r0θ0
=dsdτ
, (8.154)
where θ0 is the absolute temperature.From the relative point of view, being r0 = η3r, the identity (8.129) reduces
(8.154) to the formη3r
θ0= ηs ;
thus, for systems undergoing reversible transformations, in each Galileanframe one has
r
θ= s , (8.155)
where θ is the relative temperature:
θ =θ0η2
. (8.156)
The converse is also valid: if (8.155) holds in any Galilean frame and with thefollowing invariance properties:
s = inv. , η3r = inv. , η2θ = inv. , (8.157)
then (8.154) holds too.The reversibility condition (8.154) introduces the relative temperature θ as
an integrating factor for r and another function of state: the entropy s. Thelatter directly concerns the thermal radiation r and allows one to write (8.131)in the form(
μD
η
).
=μD
ηθ0s−
(μD
ηε
).
− ηDw(i) + μηDqc , (8.158)

8.14 Reversible Systems Without Material Structure 291
or (μD
η
).
= −(μD
ηF).
− s(μD
ηθ0
).
− ηDw(i) + μηDqc , (8.159)
where F is the free energy (per unit proper mass):
F def= ε− sθ0 . (8.160)
As a consequence, the sources become F, φi and q as well as the two functionsof state: ε and s (or equivalent functions like F and s).
In the general case too, using (8.158) and (8.159), the reversibility hypothe-sis can give suggestions about the properties of the sources, taking into accountthe expression of the internal force power (8.118) or (8.123). However, similarto what happens in the classical case, such hypothesis is particularly effectivefor a continuum without internal material structure and not in the generalcase.
8.14 Reversible Systems Without Material Structure
Let us now assume that (8.151) and (8.154) are satisfied; then, from (8.158),at least for qc = 0, we have the following restriction for the sources:
ε = θ0s−1μ0w(i) , (8.161)
which is unconditionately valid, i.e. it holds for each reversible transformationof the system. Using (8.118) (or (8.123)), it follows that, for each element ofthe continuum, the function of state ε depends on the entropy s, as well asthe variables gik (or gik) given by (8.119):
ε = ε(yi, s, gik) . (8.162)
Moreover, the continuum admits constitutive equations of the form
θ0 =∂ε
∂s, Yik = 2μ0
∂ε
∂gik, (8.163)
implying that it is necessarily hyperelastic.Equations (8.163) allow to deal with the isoentropic case: s = const. in a
purely mechanical context (that is, without considering the coupling with theheat equation; the latter is necessary when the temperature is considered asa new variable). The isothermal case, instead, is related to the free energy F .More precisely, (8.159) gives the following restriction:
F = −sθ0 −1μ0w(i) ; (8.164)

292 8 Elements of Relativistic Thermodynamics of a Continuum
thus for each element of the continuum, F depends on one side on the absolutetemperature θ0 and on the variables gik (or gik):
F = F(yi, θ0, gik) ; (8.165)
on the other side, the following constitutive relations hold:
s = − ∂F∂θ0
, Yik = 2μ0∂F∂gik
. (8.166)
In both cases, isentropic or isothermal, assuming the validity of the Helmholtzpostulate6
∂2ε
∂s2> 0 ∼ ∂2F
∂θ20< 0 , (8.167)
the characteristic functions of state reduce to a single one: ε or F . In otherwords, as in the classical case, systems undergoing reversible transformationsare characterized by a single constitutive function, which allows us to specifyall the sources, apart from the mechanical action F and the surface thermo-mechanical one.
At least from the constitutive point of view such relativistic systems are thecounterpart to the ordinary Lagrangian systems in the context of continuoussystems, both of them described by a single function.
If the mass 4-force is intrinsically conservative, that is
k = GradU(x) , (8.168)
with U a scalar invariant, one finds in each Sg7
μF = μ0(k + k · γγ) ≡ GradU(x) (8.169)
and
μr = −μ0
ηk ·V ≡ −μ0
η
dUdτ
,
6 Such a postulate states that the specific heat is always positive for a constantconfiguration [8]. It is equivalent to the condition that the internal energy is anincreasing function of the absolute temperature θ0 > 0:
∂ε
∂θ0≡ −θ0
∂2F∂θ2
0
> 0 ,
once (8.160) and (8.166)1 for the internal energy
ε = F − θ0∂F∂θ0
are considered.7 Note that the symbol Grad denotes the projection orthogonal to γ of the space-
time gradient Grad.

8.15 Isotropic Reversible Systems Without Material Structure 293
that is, from (8.129):μr = −μ0U . (8.170)
Therefore, each continuum with applied mass solicitation like (8.168) nec-essarily undergoes reversible transformations too, with
s = −Uθ0, θ =
θ0η2
, (8.171)
where θ0 is now an arbitrary positive constant. This is a very special case,in which all the sources (including mechanical mass forces) are derived by asingle function of state: the internal energy or the thermodynamical potential;in fact, (8.166)1 specifies the intrinsic potential U , according to (8.171)1:
U = θ0∂F∂θ0
, θ0 = const. (8.172)
8.15 Isotropic Reversible SystemsWithout Material Structure
Let us assume again that the continuum C has no material structure and issubjected to reversible transformations, so that, together with (8.151), theconstitutive relations (8.163)–(8.166) hold.
If one avoids a direct coupling with the heat theory also in the relativisticcontext, that is, if one only considers isothermal (θ0 = const.) or isentropic(s = const.) transformations, it comes out:
Yik = 2μ0∂W
∂gik, (8.173)
where the potential W is given by
W =
⎧⎪⎪⎨⎪⎪⎩
ε(yi, gik, s)|s=const. adiabatic internal energy,
F(yi, gik, θ0)|θ0=const. isothermal free energy.(8.174)
In this case one has a completely determined mechanical scheme, in the sensethat, once the potential W and the constitutive law of the thermal flux q isknown (in isothermal conditions one must assume q = 0), one has the samenumber of equations as unknowns. Apart from initial and boundary conditions(which can easily be derived in relative terms from the absolute formulation),the final set of equations in Lagrangian form is the following:
1D∂t(DP) = μF− 1
D∂i(DYi) , ∂t
(μDη
)= 0 , (8.175)

294 8 Elements of Relativistic Thermodynamics of a Continuum
where⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
P def= μ(1 +
ε
c2
)v +
1c2
(η2viYi + ηq + 2
η3
c2q · vv
)
Yi def= Yi +η
c2qiv , Yi = gikYkheh , q def= q− 1
c2q · vv,
Yik = 2μ
η2
∂W
∂gik, gik = gik − 1
c2vivk;
(8.176)
this requires that the internal energy ε in the adiabatic case coincides withW and is related to F in the isothermal case, taking into account (8.160) and(8.166)1:
ε =
⎧⎪⎨⎪⎩W adiabatic case,
W −(θ0∂F∂θ0
)θ0=const.
isothermal case.(8.177)
As in the classical case, (8.175) can be written in scalar terms in differentways, but the Lagrangian form of the system introduces one more unknown:the metric gik. Hence, one is forced to pass to the intrinsic formulation.
Equation (8.175) requires that both the specific mass force F and the po-tential function W (yi, gik), characteristic of the material, as well as the con-stitutive law of q are all assigned.
The determination ofW is related to the experimental study of the responseof a material (i.e. of the internal stresses) to the various kind of solicitation:pression or simple flexion, presso-flexion, torsion, etc. Symmetry properties asthe existence of preferred configurations (natural status, isotropic status, etc.)may eventually reduce the number of variables on which W depends and evensuggest the functional form. For instance, for isotropic systems, W becomesa function of three variables, instead of six. In fact, W depends on the directdeformation ε∗ik only through its fundamental invariants Ik (with respect tothe metric g∗ik) or equivalent variables. To show this let us recall the isotropyproperty (8.148) which reduces (8.173) to the following differential form:
(P g∗ik +Qε∗ik +Rε∗ji ε∗jk)˙ε∗ik = μ0W (ε∗ik) , (8.178)
deducible fromYik = 2μ0
∂W
∂gik= μ0
∂W
∂ε∗ik, (8.179)
where a dot here denotes that the infinitesimal variationW can thus be consid-ered as a function of the direct deformation characteristics ε∗ik, in agreementwith (8.141)1:
gik = g∗ik + 2ε∗ik (8.180)
(the metric g∗ik or g∗ik should be known).Condition (8.178) holds for any transformation of the system, that is, for any
choice of the variables εik∗ (or ˙ε∗ik). Moreover, after introducing the invariants

8.16 Perfect Fluids with Heat Transfer 295
Jk (linear, quadratic and cubic of εik∗ ) in place of the deformation invariantsIk:
J1 = g∗ik εik∗ , J2 = ε∗i
j ε∗ji , J3 = ε∗i
j ε∗jhε∗h
i , (8.181)
we find
˙J1 = g∗ik
˙ε∗ik ,˙J2 = 2ε∗i
j˙ε∗j
i ,˙J3 = 3ε∗i
j ε∗jh˙ε∗h
i , (8.182)
where ˙ε∗hi = g∗il
˙ε∗jl. Equation (8.178) thus becomes
P˙J1 +
12Q
˙J2 +
13R
˙J3 = μ0W (J) (8.183)
and turns out to be equivalent to the condition that, for each element ofthe continuum, W depends on the direct deformation only through the threevariables Jk (in a 1–1 correspondence with the deformation invariants Ik).Furthermore, in (8.148) one has
P =μ
η2
∂W (J)∂J1
, Q = 2μ
η2
∂W (J)∂J2
, R = 3μ
η2
∂W (J)∂J3
, (8.184)
with the general relations
J1 = I1 , J2 = I21 − 2I2 , J3 = I3
1 − 3I1I2 + 3I3 . (8.185)
In this way, all the ingredients necessary to develop a relativistic finite elas-ticity theory are introduced, in particular a second degree theory, similar tothe classical one, due to Signorini [11, 12]. One has to require the conditionthat, according to (8.181), the constitutive relations (8.149) were exactly ofthe second degree in the inverse deformation or in the direct deformation [13]for an analogous theory.
8.16 Perfect Fluids with Heat Transfer
Consider now the special case of a perfect fluid, characterized by the absence ofviscosity (8.92) and by a reduced constitutive relation between proper pressurep0 and proper density of proper mass μ0. We note that, similar to the classicalcase [8], in the context of continua without material structure a relativisticperfect fluid can also be defined through the condition that for each elementof the continuum the internal forces (a) do not contrast the disjunction ofelements of the continuum, (b) do not provide work for any transformationwithout change of proper volume; and (c) that the system undergoes reversibletransformations.
Such hypotheses are summarized by the condition that the thermodynami-cal potential F given by (8.160) depends on the metric gik through the propernumerical density of the particles 1/D0:

296 8 Elements of Relativistic Thermodynamics of a Continuum
1D0
=1ηD ≡
√det||gik|| ; (8.186)
moreover, in any configuration C, we find
Yik = p0gik, p0 = −μ0D0∂F(D0, θ0)
∂D0. (8.187)
Using now the proper mass conservation law (due to the assumed absence ofmaterial structure)
μ0D0 ≡μDη
= const. > 0 , (8.188)
we have the characteristic equation
p0 = p0(μ0, θ0) . (8.189)
Finally, for a perfect fluid with thermal conduction, the set of evolution equa-tions, in Lagrangian form, is the following:
1D∂t(DP) = μF− 1
D∂i(DYi) , ∂t
(μDη
)= 0 , (8.190)
where ⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
P =[μ+
1c2
(με+ η2p0 +
2c2η3q · v
)]v +
1c2ηq,
q = q− 1c2
q · vv,
Yi =(p0δ
ik +
1c2ηqivk
)ek,
p0 = −∂F(x, θ0)∂x
, xdef=
1μ0.
(8.191)
When q = 0 and considering isothermal or adiabatic transformations, thesystem (8.190) gives rise to a purely mechanical scheme, as for the more gen-eral case of a continuum without material structure and undergoing reversibletransformations. Such a scheme is completely determined starting from thefunction F ; when q �= 0, at least in the general case, in order to have the samenumber of equations as unknowns one needs either the relativistic heat equa-tion (not yet formulated in a very satisfactory way) or the evolution equationfor the thermal flux q, that is the so-called entropy principle.
8.17 Introduction to the Cauchy Problem
The classical approach to physics is very different if compared with the rel-ativistic one. Consider, for example, the case of mechanics; in the classicaltheory, based on the Galilean principle of relativity, the only possible pointof view is the relative one. On the other hand in relativity there are threepossible formulations:

8.17 Introduction to the Cauchy Problem 297
1. the absolute point of view, which is framed in the four-dimensional space-time (flat in special relativity or curved in general relativity) and expressedin tensorial language. It is simple and elegant because of its geometricalcontent but, unfortunately, it deals with four-dimensional (absolute) ob-jects, which are but not (directly) observable.
2. the relative point of view, which is tied to an arbitrary three-dimensionalreference frame, i.e. a Galilean “solid”, and is expressed in terms of physi-cal (observable) quantities. This point of view, instead, is more efficient forthe applications, because of its three-dimensional content, and uses quan-tities which are directly observable. Moreover, it is formally invariant withrespect to the choice of a reference frame (principle of relativity).
3. the proper Galilean frame point of view, associated with the world linesof the continuum itself. In this case, once given a reference frame, theproper quantities become the observables. For instance, we have seen howthe hypothesis of pure pressure for a relativistic fluid is formulated inthe proper Galilean frame. Though it represents an absolute property ofthe continuum, it assumes a dynamic character in every frame. Similarto a Born-rigid motion which appears deformable in every frame, so arelativistic nonviscous fluid in general appears as viscous in any frame(see Sect. 8.8).
The unifying aspect of relativity is particularly evident in the mechanics ofcontinua, where the 4-stress tensor combines three proper quantities: mechani-cal stress, thermal flux and internal energy density. Again, the three kinematicingredients: acceleration, angular velocity and deformation velocity (distinctin classical theory), are summarized, in relativity, by a single 4-tensor: thespace-time gradient of the 4-velocity: V [14, 15].
In this context we will to discuss the intrinsic Cauchy problem in specialrelativity for thermomechanical continua, intrinsic in the sense of the rigidEuler dynamics or according to the “repere mobile”. In fact, let us consideran anholonomic frame distribution and the associated essential ingredients(geometrical and physical); we have a principal (Cauchy) problem and thena secondary problem, sub-ordered to the first and totally integrable. Here theassumed variables (all spatial) are metric, angular and deformation velocities,acceleration and mass density. We will also discuss the corresponding con-ditions of compatibility; the latter, classically, constrain only the deformationvelocity, whereas in relativity, constrain both the acceleration and the angularvelocity. Consequently, the initial constraints involve the acceleration as wellas the constitutive functions which, in such a way, have influence also on theinitial data.
8.17.1 Relativistic Compatibility
Denote by Γ a timelike congruence of world lines identifying a kinematic con-tinuum in M4. The lines of Γ never intersect each other (conservation of the

298 8 Elements of Relativistic Thermodynamics of a Continuum
particles’ number) and are characterized by the timelike unit tangent vectorfield γ, γ · γ = −1, so that V = cγ represents the local 4-velocity of thecontinuum itself.
Introduce local coordinates yα with (α = 0, 1, 2, 3) and y0 = ct adapted to Γ;let {eα} be the natural basis associated with yα and gαβ(y) the correspondingmetric, analogous to (5.11) but now in four dimensions.
Γ induces in M4 an almost-product orthogonal structure 1×3, locally definedby the timelike direction γ and by the spatial platform Σ, i.e. the orthogonalcomplement to γ in the tangent space. This structure allows a systematicand natural decomposition of all tensor fields in M4 which can be directlyachieved by using an adapted anholonomic basis. For example, a convenientalmost-natural basis {eα} is the following8:
e0def= V ∼ V 0e0, ei
def= ei −Vi
V0e0 ∼ ei = ei +
1c2ViV , (8.192)
having tensorial behaviour under transformations of the coordinates yα inter-nal to Γ, that is
y0′= y0′
(y), yi′ = yi′(y1, y2, y3), (8.193)
and giving rise to the (Euclidean) induced metric on Σ
γik = ei · ek , (8.194)
with inverse γik.The following fundamental relations are associated with (8.192):
⎧⎪⎨⎪⎩∂iek = Γj
ik ej +1c2HikV, ∂ei = Hi
kek +1c2AiV,
∂iV = Hikek, ∂V = Aj ej ,
(8.195)
where Hik = γkjHij and ∂α ≡ (∂, ∂i) are the Pfaffian derivatives correspond-
ing to the frame vectors of (8.192):
∂def= V α ∂
∂yα, ∂i
def=∂
∂yi− Vi
V0
∂
∂y0∼ ∂
∂yi+
1c2Vi∂. (8.196)
Equation (8.195) contain all the geometrical–kinematical ingredients for thedescription of the continuum Γ, namely the proper deformation velocity Kik,the angular velocity Ωik (which together form the tensor Hik = Kik + Ωik),the 4-acceleration Ai = c2Ci (Ci being the curvature vector of the world linesof Γ) and finally the spatial Christoffel symbols Γj
ik. One can evaluate theanholonomic tensor associated with the derivatives (8.196),8 We have indicated here both the general form and the corresponding one in
adapted coordinates to Γ, the latter being specified by a ∼.

8.17 Introduction to the Cauchy Problem 299
[∂α, ∂β] = Aσαβ ∂σ , (8.197)
whose nonvanishing components are
A0i0 =
Ai
c2, A0
ik = 2Ωik . (8.198)
A direct calculation gives then the following expressions:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
Ci = γ0
[∂iγ
0 + ∂
(γi
γ0
)],
Kik =12∂γik,
Ωik = γ0
[∂i
(γk
γ0
)− ∂k
(γi
γ0
)],
Γjik
def= 12γ
jh(∂iγkh + ∂kγhi − ∂hγik).
(8.199)
Similarly one can evaluate the Riemann or curvature tensor of M4, definedby
Rαβρ = [∂α, ∂β ]eρ −Aσβα∂σeρ ≡ Rαβρ
σeσ , (8.200)
and identically zero, M4 being a flat space-time. However, when its compo-nents are considered as functions of the tensorsHik, Ai and Γj
ik, the vanishingcondition is equivalent to certain relations among these fields which are justthe compatibility conditions of the differential system (8.195). More precisely,the curvature tensor, because of its symmetries, has only three types of inde-pendent components: Rikh
j , Rikh0 and R0ik
0 (see e.g. [16], (5.65) and (5.67),as well as [17, 18]). A direct evaluation shows the following set of anholonomicconditions:
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
Rikhj ≡ Pikh
j +1c2(HkhHi
j −HihHkj − 2ΩikHh
j)
= 0,
Rikh0 ≡ Bikh = ∇iHkh − ∇kHih −
2c2
ΩikAh = 0,
R0i0k ≡ Cik = ∂Hik −(∇i +
1c2Ai
)Ak −HijHk
j = 0,
(8.201)
where Pikhj is the spatial curvature tensor associated with the spatial connec-
tion Γhik:
Pikhj def= ∂iΓj
kh − ∂kΓjih + Γl
khΓjil − Γl
ih Γjkl , (8.202)
and ∇i denotes the Cattaneo’s transverse covariant derivative [19], i.e. thecovariant extension of the Pfaffian derivatives ∂i by means of the connection

300 8 Elements of Relativistic Thermodynamics of a Continuum
Γjik.9 We note that the conditions (8.201)1,2 generalize the Gauss–Mainardi–
Codazzi equations to the case of a distribution of 3-planes {Σ}; in fact, if {Σ}is integrable,10 i.e. if Ωik = 0, we have the ordinary form of the equations withHik symmetric representing the second quadratic form of Σ.
The last set of equations (8.201)3, having evolutive character, yields the timederivative of the tensor Hik; hence, as in the classical case [20], the dynamicalcompatibility leads to the following system:
∂γik = 2H(ik), ∂Hik =(∇i +
1c2Ai
)Ak −HijHk
j , (8.203)
with the supplementary conditions (8.201)1,2:
Rikhj = 0, Bikh = 0. (8.204)
Compared with the classical situation, here we no longer have the separationof the variables γik and Hik. Moreover, in (8.204)1 we have not only themetric, through the spatial Christoffel symbols Γj
ik, but also the tensor Hik;the acceleration Ai appears instead in (8.204)2.
The constraints (8.204) when expressed in terms of Γhik, Hik and Ai are
still involutive. In fact, we have the following spatial identities (i.e. Bianchiidentities, see [18], p. 88):
∇[lPik]hj +
2c2
Ω[ikHl]hj = 0, (8.205)
where the 3-tensor Hikj is related to the deformation velocity by
Hikj def= γjh
(∇iKkh + ∇kKhi − ∇hKik
); (8.206)
moreover, since Cik = 0 we also have a first-order differential system, linearand homogeneous in the spatial tensors Rikh
j and Bikh:⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
∂Rikhj = HjlRikhl − Hh
lRikjl −(∇k +
1c2Ak
)Bhji
+(∇i +
1c2Ai
)Bhjk −
1c2
(AjBikh −AhBikj) ,
∂Bikh = −RikhlAl +Hh
lBikl +HilBhlk −Hk
lBhli.
(8.207)
Therefore, as in the classical situation, once the proper acceleration field isassigned
9 For any spatial vector X = Xkek the Cattaneo’s transverse covariant derivativeis given by
∇i Xk = ∂iXk + Γk
ijXj .
10 In this case Γ is said to be a normal congruence.

8.17 Introduction to the Cauchy Problem 301
Ai = Ai(y, γjk, Hjk, ...) , (8.208)
the evolution of the continuum can be reduced to the Cauchy problem (8.203),with given initial values γik,0 and Hik,0 (on an initial hypersurface) and sub-jected to the conditions (8.204).
The evolution equations still have a precise geometrical meaning (vanishingof the curvature tensor, Bianchi identities, etc.), and the classical ingredientshave their direct counterparts in the proper ingredients of the continuum.Moreover, apart from the presence of the tensor Hik in (8.201)1, there is anew variable in (8.201)2: the proper acceleration Ai. On the other hand, thecondition Bikh = 0 implies B[ikh] = 0, from which the following relationsbetween the tensors Ωik and Ai hold (Jacobi identity):
∂Ωik =1c2∂[iAk], ∇[iΩkh] −
1c2
Ω[ikAh] = 0. (8.209)
Consequently, introducing the tensor Aikh:
Aikhdef= Bikh −
32B[ikh], (8.210)
which is in 1–1 correspondence with Bikh:
Bikh = Aikh − 3A[ikh], (8.211)
Equation (8.204)2 can be written in the form of a (total) differential systemfor the angular velocity Ωik:
Aikh ≡ ∇hΩik + ∇iKhk − ∇kKih
+1c2
(ΩkhAi + ΩhiAk − ΩikAh) = 0 ; (8.212)
here, different from the classical case, we have the presence of the accelerationAi as well as that of the metric, through the spatial Christoffel symbols.However, the system (8.212) no longer has the unlimited integrability of theclassical case but there are compatibility conditions [18].
8.17.2 Intrinsic Cauchy Problem in Relativity
The relative decomposition of the Riemann tensor (8.201) with Ai = c2Ci:⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
Rikhj ≡ Pikh
j +HkhHij −HihHk
j − 2ΩikHhj ,
Rikh0 = Bikh ≡ ∇iHkh − ∇kHih − 2ΩikCh,
R0i0k = Cik ≡ ∂Hik − c2(∇i + Ci
)Ck −HijHk
j ,
(8.213)
associates with the curvature tensor three independent spatial tensors: Rikhj ,Bikh and Cik; Rikhj obviously satisfies all the algebraic properties of a curva-ture tensor; Bikh is antisymmetric with respect to its first pair of indices and

302 8 Elements of Relativistic Thermodynamics of a Continuum
satisfies a cyclic property according to (8.209)2; finally, Cik is a symmetric ten-sor, because of the condition (8.209)1, with the additional conditions (8.209):
∂Ωik = ∇[iCk], ∇[iΩkh] − C[iΩkh] = 0 . (8.214)
If the Cauchy problem is formulated in anholonomic terms, the followingdifferential system of first order (in time) for the variables γik and Hik =Ωik +Kik holds:
⎧⎨⎩∂γik = 2H(ik),
∂Hik = HijHkj + 2(∇i + Ci)Ck.
(8.215)
Together with (8.215) we should consider, a priori, further conditions (8.214).However, (8.214)1 is a consequence of the system (8.215); in fact, (8.215) canbe written in the equivalent form:
⎧⎨⎩∂γik = 2Kik, ∂Ωik = ∇[iCk],
∂Kik = HijHkj + 2∇(iCk) + 2CiCk.
(8.216)
Summarizing, the effective constraints for the variables γik and Hik (in invo-lution, because of the Bianchi identities) are given by (8.213)1,2 only:
⎧⎨⎩Pikh
j +HkhHij −HihHk
j − 2ΩikHhj = 0,
∇iHkh − ∇kHih − 2ΩikCh = 0,(8.217)
since (8.214)2 is a consequence of (8.217)2, noting that
12B[ikh] = ∇[iΩkh] − C[iΩkh] = 0 .
Thus, we have 6 + 9 = 15 restrictions (all independent) to the initial data:γik,0 and Kik,0 with their first and second derivatives.
In the Minkowski case the field equations (8.216) as well the constraints(8.217) both depend on the curvature vector Ci. So, what is the role that theacceleration plays in (8.216) and (8.217)?
Clearly, the acceleration components are not additional field variables (be-sides γik and Hik), because they obey Galilei principle; hence, they are func-tions of the thermodynamic variables of the continuum Γ. This fact loses itsmeaning in the case of the vacuum, just because of the absence of matter.However, it is worth to note that for any choice of the reference frame Γthe formulations (8.216) and (8.217) of the evolution problem in M4 have aninvariant meaning for every coordinate transformation internal to Γ:
y0′ = y0′(y), yi′ = yi′(y1, y2, y3).

8.17 Introduction to the Cauchy Problem 303
Therefore, it has an intrinsic meaning in the considered frame, and this is asubstantial difference from the formulation of the analogous problem in termsof coordinates.
As a consequence, the case of vacuum is completely different from the caseof presence of matter. In other words, in the case of vacuum, Γ cannot havemore than a purely geometrical–kinematical meaning; it is completely at dis-posal and there are no preferred choices due to physical reasons (i.e. there isno inertia without matter). Some simplifying choices, as concerns the gravi-tational equations, can be suggested only by the initial conditions.
8.17.3 Thermodynamical Continuum at Rest in Γ
Let us consider first of all the case of a thermomechanical continuum at restin Γ. Let the coordinates be adapted to Γ and satisfy the condition:
γ0 = −1 ∼ g00 = −1, (8.218)
always compatible and invariant under coordinate transformations like
y0′ = y0 + Ψ(y1, y2, y3), yi′ = yi′(y1, y2, y3). (8.219)
The field equations (8.216) are then combined with the conservation equa-tions of the matter: ∇βM
αβ = 0, so that we must determine both the restcongruence of the continuum Γ0 (coinciding with Γ) and the proper dynamicalvariables. Taking into account the expressions (8.199) for Ci and Ωik:
Ci = γ0
(∂iγ
0 + ∂γi
γ0
), Ωik =
12γ0
[∂i
(γk
γ0
)− ∂k
(γi
γ0
)], (8.220)
which reduce in this case (γ0 = −1) to
Ci = ∂γi , Ωik =12
(∂iγk − ∂kγi
), (8.221)
we have the following Cauchy problem for the (anholonomic) variables γik, γi,Hik,Mk
0 and M00:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
∂γik = 2H(ik), ∂γi = Ci,
∂Hik = (∇i + Ci)Ck +HijHkj ,
∂M00 = −KM0
0 − (∇i + Ci)M0i +HikM
ik, K = Hii,
∂Mk0 = −KMk
0 + 2H[ik]M0i + CkM0
0 − (∇i + Ci)M ik.
(8.222)
Furthermore, the Cauchy data on a given surface must satisfy the involutiveconstraints (8.217).

304 8 Elements of Relativistic Thermodynamics of a Continuum
The energy tensor Mαβ is not specified yet, and the form of the Cauchyproblem depends on the structure of Mαβ , i.e. it is different according tothe considered continuum: dust, perfect fluid, mechanical, thermomechanical,polar, neutral or with electromagnetic field.
As a concrete example, let us consider a nonpolar continuum
Mαβ = μ0VαV β + Tαβ, (8.223)
where the proper stress tensor Tαβ (mechanical and thermal) is given by
Tαβ = Xαβ +Qαβ +εc,0
c2V αV β , (8.224)
with εc,0 = μc,0c2 the conduction thermal energy. Tαβ includes the proper
mechanical stresses Xαβ:
Xαβ = Xβα, XαβVβ = 0, (8.225)
and the proper thermal stresses:
Qαβ =1c2
(qα0 V
β + qβ0 V
α), (8.226)
depending on the thermal flux qα0 :
qα0 Vα = 0. (8.227)
The tensor Mαβ then takes the (standard) form
Mαβ = μ0VαV β +Xαβ +Qαβ , μ0
def= μ0 + μc,0, (8.228)
where μ0 is the total energy density. Therefore in the proper frame γ = V/cand using the anholonomic basis (8.192) the components of Mαβ are
M00 = μ0c2, M0i =
1cqi0, M ik = X ik , (i = 1, 2, 3). (8.229)
To determine the vector qi0 it is necessary to add to (8.222) certain supple-
mentary equations,11 namely the Fourier equation (modified in the sense ofCattaneo [21])
∂q0i = −ν(q0i + kf ∂iθ0
)(8.230)
and the heat equation
11 We follow here the scheme introduced in [22] and further developed in [23]3 (seep. 118). The modification to the Fourier law introduced by Cattaneo [24] has beencast in covariant form later by Kranis [25]. Different modifications also exist dueto Vernotte, Eckart, etc. and they are briefly reviewed by Kranis in the above-mentioned paper.

8.17 Introduction to the Cauchy Problem 305
C ∂θ0 = −θ0∂w
(i)0
∂θ0+Q . (8.231)
In (8.230) kf is the Fourier constant while the coefficient 1/ν has the di-mensions of time and represents the thermal inertia; finally C is the specificthermal capacity of the medium, w(i)
0 is the mechanical power:
w(i)0 = Xαβ∇αVβ = X ikHik , (8.232)
and Q the thermal power:
Q = −∇αqα0 = −
(∇i + Ci
)qi0 . (8.233)
Thus, (8.222)4 reduces to the form
1c2
(μ0c2δi
k +X ik)Ai = −
[∇iX
ik −
ν
c(q0k + kf ∂kθ0)
+1cKq0k −
2cH[ik]q
i0
](8.234)
and can be solved with respect to the accelerationAi =Ai(μ0, Xik, Hik, q0i, θ0),if the condition
det ‖ μ0c2δi
k +X ik ‖ �= 0 (8.235)
is satisfied. Thus the proper formulation of the Cauchy problem results in thefollowing set of equations:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
∂γik = 2H(ik) , ∂γi = Ci ,
∂Hik = (∇i + Ci)Ck +HijHkj + Pik , Pik = Pjik
j ,
∂μ0 = −Kμ0 −1c2
[∂εc,0 +Kεc,0 +HikX
ik +1c(∇i + Ci)qi
0
],
∂q0i = −ν(q0i + kf ∂iθ0) ,
∂θ0 = −1C
[θ0
∂
∂θ0(X ikHik) + (∇i + Ci)qi
0
],
(8.236)
with the constraints (8.217) for the initial data. Such a differential problemmust then be completed with the constitutive equations
εc,0 = εc,0(Y ), Xik = Xik(Y ) , (8.237)
where Y denotes the set of the unknowns of the system (8.236):
Y ≡ (γik, γi, Hik, μ0, q0i, θ0) .

306 8 Elements of Relativistic Thermodynamics of a Continuum
We notice here the typical relativistic link between the initial conditions andthe constitutive equations (8.237): both functions εc,0 and Xik are not freebut related by the constraint (8.217), because of their dependence on μ0 =μ0 + εc,0/c
2, Ci and Hik. For a continuum without thermal flux (ordinarycontinuum) we have instead a purely mechanical scheme, i.e. the variables areonly γik, γi, Hik and μ0.
Finally, the case of a continuum examined in an arbitrary reference frame(i.e. the case Γ �= Γ0) can be treated similarly (the whole discussion as wellas all the mathematical details can be found in [23]3).
We conclude this chapter noting that we have considered here only the for-mulation of the general continuum relativistic dynamics, with special attentionto the intrinsic aspects of the associated Cauchy problem. The resulting set ofdifferential equations, completed by assigned constitutive relations and initialdata, forms a system of coupled partial differential equations with (polyno-mial) analytic coefficients but still containing Pfaffian derivatives (essentialfor the intrinsic formulation outlined above). Putting the system in its nor-mal form and verifying the hypotheses of the Cauchy–Kowalesky theorem [26],i.e. discussing local existence of the solutions, is an open problem.
References
1. W.G. Dixon, Special relativity, Cambridge University Press, London (1978). 2642. G. Grioli, Elasticita asimmetrica, Ann. Matem. Pura Appl. IV, 50, 389–417
(1960). 2643. G. Grioli, Mathematical theory of elastic equilibrium (recent results), Ed.
Springer, Berlin (1962). 2644. G. Ferrarese, Lezioni di meccanica superiore, Ed. Veschi, Roma, (1968). 264, 279, 2885. G. Ferrarese, Intrinsic formulation of Cosserat continua dynamics, Trends in
Applications of Pure Mathematics to Mechanics, Vol. II, Pitman Publishing,London 97–113 (1978). 264
6. C. Cattaneo, A conjecture on the energy momentum tensor of a non viscousrelativistic fluid, Rend. Acc. Naz. Lincei VIII, XLVI, 342–347 (1969). 266
7. C. Truesdell, R.A. Toupin, The classical filed theories, Handbook der PhysikIII/1, Springer, Berlin (1960). 269
8. A. Signorini, Trasformazioni termoelastiche finite, Mem. I, Annali di Matem.Pura e Appl. IV, 22, 33–143, (1943). 284, 288, 292, 295
9. C. Truesdell, W. Noll, The nonlinear field theories of mechanics, Handbook derPhysik, III/3, Springer, Berlin (1965). 287
10. G. Ferrarese, Introduzione alla dinamica Riemanniana dei sistemi continui, Ed.Pitagora, Bologna (1981). 288
11. A. Signorini, Sulle deformazioni termoelastiche finite, Int. Kongr. for Teknisk.Mekanic, Stockholm (1930). 295
12. A. Signorini, Trasformazioni termoelastiche finite, Ann. Mat. IV, 30, 1–72(1949). 295
13. L. Stazi, Sulle deformazioni finite dei continui isotropi, Rend. Sem. Mat. Torino,33, 313–335 (1974–75). 295

References 307
14. G. Ferrarese, Sur la formulation 3-dimensionnelle de la thermodynamique rel-ativiste, Actes des Journees relativistes de Toulouse, 23–24 4, 57–68 (1986);Sulla Formulazione della termodinamica dei continui relativistici, Rend. Semin.Mat. Fis. Milano, 56, 113–24 (1986); Intrinsic formulations in relativistic con-tinuum mechanics, Proceedings of the conference Selected Problems of ModernContinuum Theories, Bologna, 49–58, (1987); Sulla formulazione intrinseca dellameccanica dei continui relativistici, Atti Semin. Mat. Fis. Univ. Modena, 36,289–302 (1988). 297
15. G. Ferrarese, Formulation intrinseque du probleme de Cauchy en relativitegenerale, C.R. Acad. Sci. Paris, 307, 1, 107–110 (1988); Formulazione intrinsecadel problema di Cauchy in Relativita Generale, Rend. Acc. Lincei, 3, 497–506(1988); Relativistic continuum dynamics: the intrinsic Cauchy problem, Il NuovoCimento B, 119, 639–659 (2004). 297
16. I. Cattaneo-Gasparini, Projections naturelles des tenseurs de courbure d’unevariete Vn+1 a metrique hyperbolique normale, C.R. Acad. Sci. Paris, 252,3722–3724, (1961); Proiezioni dei tensori di curvatura di una varieta Rieman-niana a metrica iperbolica normale, Rend. Mat. Roma XXII, (1–2), 127–146(1963). 299
17. G. Ferrarese, Contributi alla tecnica delle proiezioni in una varieta a metricaiperbolica normale, Rend. Mat. Roma, 22, 147–168 (1963). 299
18. G. Ferrarese, Proprieta di II ordine di un generico riferimento fisico in relativitagenerale, Rend. Mat. Roma, 24, 57–100 (1965). 299, 300, 301
19. C. Cattaneo, Proiezioni naturali e derivazione trasversa in una varieta Riemanni-ana a metrica iperbolica normale, Ann. Mat. Pura. Appl. IV, XLVIII, 361–386(1959). 299
20. G. Ferrarese, Sulla formulazione della dinamica dei continui iperelastici, Rend.Mat. Roma, 8, 235–249 (1975); Sulla formulazione intrinseca della dinamica deicontinui alla Cosserat, Ann. Mat. Pura Appl., CVIII, 109–124 (1976). 300
21. C. Cattaneo, Atti Semin. Mat. Fis. Univ. Modena, III, 83–101 (1948–49). 30422. H. Ott, Lorentz transformation der warme and der temperature, Z. Phys., 175,
70–104 (1963). 30423. G. Ferrarese, Sur la formulation 3-dimensionnelle de la thermodynamique rel-
ativiste, Actes des Journees relativistes de Toulouse, 23–24, 4, 57–68 (1986);Sulla Formulazione della termodinamica dei continui relativistici, Rend. Semin.Mat. Fis. Milano, 56, 113–24 (1986); Intrinsic formulations in relativistic con-tinuum mechanics, Proceedings of the conference Selected Problems of ModernContinuum Theories, Bologna, 49–58 (1987); Sulla formulazione intrinseca dellameccanica dei continui relativistici, Atti Semin. Mat. Fis. Univ. Modena, 36,289–302 (1988). 304, 306
24. C. Cattaneo, Sur une forme de l’equation de la chaleur eliminant le paradoxed’une propagation instantanee, C.R. Acad. Sci., 247, 431–433 (1958). 304
25. M. Kranis, Relativistic hydrodynamics with irreversible thermodynamics with-out the paradox of infinite velocity of heat conduction, Il Nuovo Cimento B, 42,51–70 (1966). 304
26. J. Hadamard, La theorie des equations aux derivee partielles, Gautier-Villars,Paris (1964). 306

9
Relativistic Electromagnetism in Vacuum
9.1 Introduction
After the formulation of the general axioms of special relativity, we haveexamined the relativistic aspects of mechanics (with the associated specificpostulates) in both the schemes of material point and continuous materialsystems. Actually, since the general axioms of special relativity have been in-troduced in order to solve the incompatibility between classical mechanics andelectromagnetism, it is also interesting to study the modifications induced toelectromagnetism. These modifications, however, will be less important thanthe really revolutionary ones that occurred in the conceptual apparatus ofmechanics; in fact the postulate that the light velocity is constant relative toany Galilean frame is related to the idea that Maxwell’s equations are for-mally invariant passing from a Galilean frame to another, as required by theextended relativity principle. As a consequence, the electromagnetic phenom-ena (in vacuum) in any fixed Galilean frame are still governed by the ordinaryMaxwell’s equations, as we are going to discuss in detail.
Let us recall that, relative to classical physics, electromagnetism is summa-rized by two sets of axioms. From one side, we have Maxwell’s equations invacuum, which determine the differential relations between the electric field Eand the magnetic field H and the associated sources (charges and currents):
⎧⎪⎨⎪⎩
div H = 0 , curlE +1c∂tH = 0 ,
div E = 4πρ, curlH− 1c∂tE =
4πc
J ,(9.1)
with ρ and J the charge and current density, respectively.From the other side, we have the Lorentz formula for the mechanical force
acting on charged matter due to the fields E and H (classically separated):
F = e
(E +
1cv ×H
), (9.2)
G. Ferrarese and D. Bini: Relativistic Electromagnetism in Vacuum, Lect. Notes Phys. 727,
309–338 (2008)
DOI 10.1007/978-3-540-73168-9 9 c© Springer-Verlag Berlin Heidelberg 2008

310 9 Relativistic Electromagnetism in Vacuum
where e is the charge in relative motion with velocity v. When v = 0, (9.2)gives the electrostatic or Coulomb force.
In classical physics, (9.1) and (9.2) have no general validity (that is for anyGalilean frame), but their validity is postulated in a special frame S∗, thecosmic Ether, and hence all the quantities appearing in (9.1) and (9.2), E, H,ρ, J and e, are invariant.
Even with this limitation, Maxwell’s equations have two fundamental con-sequences. The first concerns the propagation speed of an electromagneticperturbation (ordinary discontinuity waves) in vacuum: this equals the uni-versal constant c, irrespective of the initial characteristics of the perturbation(e.g. the electromagnetic source as well as its motion with respect to the Ether,etc.). Initial conditions can influence certain properties of the perturbation,like the frequency, but not the speed, which is always (experimentally) co-incident with light speed in vacuum, c. This numerical coincidence has justrepresented the first element in favour of the interpretation of light as anelectromagnetic phenomenon. A second element has been the transversalitycommon to both the electromagnetic waves (deduced from Maxwell’s equa-tions) and luminal waves (experimental fact).
Another important consequence of (9.1) is the continuity equation of theelectric charge:
∂tρ+ div J = 0 , J = ρv , (9.3)
which expresses, for the charge, a typical property of the mass, i.e. its conser-vation in the absolute frame.
Electromagnetism, like mechanics, also had a number of experimental con-firmations as well as many theoretical developments, connected with a pureelectromagnetic field (in vacuum) or in the presence of matter, at rest withrespect to the Ether, or in slow motion with respect to this. More precisely,the agreement between theory and observations is satisfying enough when thefollowing two conditions hold: (1) velocity u of the laboratory, with respectto the Ether, as well as velocities v′ of particles, with respect to the labora-tory, are very small with respect to the light velocity: u/c� 1, v′/c� 1; (2)instrumental precision of the first order, in u/c and v′/c.
If the instrumental precision is higher and allows the evaluation of second-order effects (as the experiment of Michelson and Morley) the disagreementbetween theory and experiments appears, and both Newtonian mechanicsand electromagnetism have to be considered in the fully relativistic contextwith fundamental modifications, as concerns the mechanical aspects, and lessimportant modifications, as concerns the electromagnetic ones.
In any case, the two classically distinct physical theories: mechanics andelectromagnetism, because of the different invariance properties with respectto the choice of the frame, find their proper geometrical and physical unifica-tion in the relativistic situation.

9.2 Sources and Electromagnetic Action. Axioms 311
9.2 Sources and Electromagnetic Action. Axioms
We pass now to the formulation of the specific axioms of relativistic electro-magnetism, by requiring preliminarily:
1. agreement with all the relativistic postulates already introduced (includ-ing the extended relativity principle), either in general or in the case ofmechanics;
2. extension of classical electromagnetism, in the sense that the (classical)first-order agreement between theory and experiment is maintained.
Furthermore, as the new theory has to be formulated both in absolute andrelative terms, all the physical quantities of the classical theory: electric chargee, charge density ρ, current density J, electric field E, magnetic field H andLorentz force F, classically defined in the absolute space, should now be intro-duced in any Galilean frame and, analogously to the mechanical quantities,they would have a relative meaning, depending on the considered Galileanframe. Thus, in a relative formulation of electromagnetism (a prioritary pointof view, with respect to the absolute one), besides fixing the ingredients andthe fundamental relations (field equations), one also has to specify their trans-formation laws.
We start considering the specific postulates, concerning sources and Lorentzforce.
For the sources, that is for the electric charge because currents are derivedquantities, we have the following:
Axiom IThe electric charge of a material point (or that of the generic element ofcharged continuous material system) is invariant (in magnitude and sign),passing from one frame to another:
e = e′ = inv. (9.4)
In particular we have e = e0, e0 being the proper charge of the particle,evaluated in the local rest frame. Axiom I gives to the electric chargea completely different role if compared with that of mass in relativity.The latter, in fact, is characterized by the law: m
√1− v2/c2 = inv. =
m0. The validity of (9.4) is obviously sub-ordered to the agreement withexperiments of all the possible consequences that can be derived from it(and from the other axioms); for instance, experiments concerning thermaleffects support such a validity (see [1], p. 38). In any case, axiom I directlygives the transformation law of the charge density ρ.
To see this, let us consider the generic fluid element of a charged con-tinuous material system. In an arbitrary Galilean frame Sg, the charge ofsuch element is expressed by
ρ dC = ρD dC , dC def= dy1 dy2 dy3 , (9.5)

312 9 Relativistic Electromagnetism in Vacuum
where ρ is the relative (in Sg) charge density, and D ≡ det||∂xi/∂yj|| isthe reciprocal of the relative numerical density of the particles. From (9.4)we have the following invariance property:
ρ dC = ρ′ dC′ ∼ ρD = ρ′D′ = inv. (9.6)
Furthermore, the product ηD (and not D) is also invariant, passing fromone frame to another, so that we have
ρ
η=ρ′
η′= ρ0 = inv. , (9.7)
with ρ0 the proper charge density; the latter, for a charged continuous sys-tem, plays the same role of μ0 for neutral material continuous system; thus,like μ0 allows the introduction of the proper 4-density of linear momentumμ0V, it gives rise to the proper 4-density of current:
S def= ρ0V , (9.8)
which summarizes the relative current density J = ρv and the chargedensity ρ. In fact, in a given Galilean frame, the 4-velocity V has theordinary decomposition V = η(v + cγ), and (9.8) becomes
S = ρ(v + cγ) , ρ = ηρ0 . (9.9)
From here, one has the relative quantities:
J = SΣ = S + S · γγ ≡ PΣ(S) , ρ = −1cS · γ . (9.10)
The formal analogy between (9.9) and the decomposition of the 4-momentumof a particle (ρ → m, J → P) immediately gives the transformation lawsof the relative quantities ρ and J:
ρ′ =σ
αρ , J′ = J−
1 +σ
α1 + α
ρu ; (9.11)
the first relation, of course, is in agreement with (9.7). From the absolutepoint of view, the sources are described by a timelike vector field S; infact, from (9.8), we have ||S|| = −ρ2
0 c2; a priori, it can have a temporal
orientation, coinciding or not with that chosen for the space-time M4 (andinduced on the world lines of test particles). Such an orientation, in fact,specifies the sign of ρ0 in (9.8), so that the field S completely describesthe sources, and with no ambiguity (world lines and ρ0):
ρ0 =ε
c
√−||S|| , V =
εc√−||S||
S , (ε = ±1) . (9.12)

9.3 Electromagnetic Tensor 313
At this point, after introducing the electromagnetic sources (with ax-iom I), we should specify the electric (E) and magnetic fields (H). With aninversion of the logical order, instead, we will assign, first, the axiom con-cerning the force generated by E and H, which actually mediates betweenelectromagnetism and mechanics.Axiom II The electromagnetic action in M4 is represented by a mechan-ical 4-force K, such that, in any Galilean frame, the associated relativeforce F coincides with the Lorentz force. Axiom II gives a purely mechan-ical meaning to the electromagnetic action (q = 0) and allows for F thevalidity of the Lorentz force (9.2) also in the relativistic context, extend-ing thus the validity to any Galilean frame. Explicitly, from the generalrelation:
K = η
(F +
Wcγ
), W = F · v + q , (9.13)
we have that axiom II is equivalent to the two conditions:
F = e
(E +
1cv ×H
), W def= F · v ≡ eE · v . (9.14)
Thus, in any Galilean frame and for any choice of internal coordinates(assuming γ = c0), the components of K have the form
K0 = −ηcW = −eη
cEiv
i , Ki = ηFi = ηe
[Ei +
1c(v ×H)i
]; (9.15)
the problem of summarizing these components in a certain law for Kα
then arises. This is suggested from the observation that such componentsare:1. proportional to the charge e;2. linear function of the velocity v (and hence of the 4-velocity).
It then appears quite natural to assume for Kα the following expression:
Kα =e
cFαβV
β , (α = 0, 1, 2, 3) , (9.16)
up to a factor. The quantity Fαβ is a 2-tensor, K and V being two 4-vectors and e and c two invariant quantities (see e.g. [2], p. 22, for thetensoriality criterion); it is necessarily antisymmetric, because of the con-dition KαV
α = 0 valid for any V α. Moreover, in order to summarize theelectric and magnetic fields, it should have six independent components,as it is the case for an antisymmetric 2-tensor.
9.3 Electromagnetic Tensor
Assuming that (9.16) summarizes the relations (9.15), independent of thechoice of the Cartesian coordinate system, we still have to specify how Fαβ

314 9 Relativistic Electromagnetism in Vacuum
is related to the electric and magnetic fields. Such a relation follows from adirect comparison of (9.15) and (9.16); in fact, for the various componentswe have F0i = −Ei, F12 = H3, F13 = −H2, etc. However, the relation canbe written directly in tensorial form, by using the natural decompositionintroduced in Chap. 2. If γ ≡ (γα) denotes the 4-vector along which thenatural projection is taken, the decomposition of Fαβ turns out to be
Fαβ = Hαβ + γαEβ − γβEα, (9.17)
where the antisymmetric property of Fαβ has been used and the vectorEα and the antisymmetric tensor Hαβ satisfy the conditions:
Eαγα = 0 , Hαβγ
β = 0 . (9.18)
Without any loss of generality, we will assume γα as a unit timelike vector:γαγ
α = −1, so that it represents the chosen Galilean frame. Independentof the choice of the coordinates xα and using (9.18), we have
Eα = Fαβγβ , Hαβ = Fαβ − γαEβ + γβEα, (9.19)
which represent just the electric and magnetic fields, as we are going toshow in detail, a fact that motivates the notation used.
More precisely, let us assume that the Cartesian basis {cα} is adaptedto Sg, in the sense that
γ = c0 ; (9.20)
that is
γ0 = 1 , γi = 0; γ0 = −1 , γi = 0 , (i = 1, 2, 3) . (9.21)
From the above conditions, (9.18) become
E0 = 0 , Hα0 = 0 ⇒ Eα = δiαEi , Hαβ = δi
αδjβHij , (9.22)
and the decomposition (9.17) for the sum FαβVβ of (9.16) implies
FαβVβ = δi
αHikVk − δ0αEiV
i + δiαEiV
0 . (9.23)
Thus, sinceV 0 = ηc , V i = ηvi , (9.24)
it results that, with
Hik ≡
⎛⎝ 0 H3 −H2
−H3 0 H1
H2 −H1 0
⎞⎠ , (9.25)
(9.23) assumes the form

9.4 Absolute Formulation of Maxwell’s Equations 315
FαβVβ = −δ0αηE · v + δi
αηc
[Ei +
1c(v ×H)i
].
Equation (9.15) then follows after multiplication by e/c. Thus we haveproven that, due to axiom II, the Lorentz 4-force is necessarily of type(9.16), with Fαβ related to the electric and magnetic fields by (9.17), forany choice of the Galilean frame Sg(γ) and of the coordinates xα. Usingadapted coordinates to Sg (9.17) simplifies as
F0i = Ei , Fik = Hik (9.26)
or
Fαβ ≡
⎛⎜⎝
0 −E1 −E2 −E3
E1 0 H3 −H2
E2 −H3 0 H1
E3 H2 −H1 0
⎞⎟⎠ . (9.27)
Axiom II is therefore equivalent to postulating the existence of an antisym-metric 2-tensor: the electromagnetic tensor field Fαβ which summarizes inany Galilean frame the electric and magnetic fields, according to (9.17)and the electromagnetic action by means of (9.16). Finally, the tensorialbehaviour of Fαβ implies for the components in any other coordinate sys-tem the general transformation law:
F ′αβ =
∂xρ
∂x′α∂xσ
∂x′β Fρσ . (9.28)
9.4 Absolute Formulation of Maxwell’s Equations
We now have to specify the relativistic equations for the electromagneticfield, that is the relations between E and H (i.e. the tensor Fαβ) and thesources ρ and J = ρv (i.e. the current density vector Sα). We have thefollowing:Axiom IIIThe evolution of the electromagnetic field, in vacuum, is governed bythe ordinary Maxwell’s equations, in any Galilean frame. This is a quitenatural axiom which implies, for its compatibility, that Maxwell’s equa-tions are formally invariant under Lorentz transformations and hence canhave an absolute formulation in M4. The latter is indeed possible becauseMaxwell’s equations can be written in terms of the two fundamental ingre-dients: the electromagnetic field Fαβ (and its first-order derivatives, whichalso have a tensorial meaning) and the current density Sα. More precisely,the ordinary Maxwell’s equation (9.1) can be cast in the following form:⎧⎪⎨
⎪⎩∂ρFαβ + ∂αFβρ + ∂βFρα = 0,
∂βFαβ =
4πcSα , (α, β, ρ = 0, 1, 2, 3),
(9.29)

316 9 Relativistic Electromagnetism in Vacuum
whereFαβ = mαρmβσFρσ (9.30)
is the completely contravariant form of F .To show that the system (9.29) is equivalent to the system (9.1), we
notice first of all that system (9.29) also contains eight independent equa-tions: (9.29)2 are four equations like (9.29)1, which apparently are 43 = 64.This number is reduced since in (9.29)1 one cannot choose two coincidingindices; in fact, if α = β, they become
∂ρFαα + ∂αFαρ + ∂αFρα = 0 ,
which is identically zero, because of the antisymmetry of Fαβ . Further-more, the antisymmetric property of F implies that the left-hand side of(9.25)1:
Tραβ = ∂ρFαβ + ∂αFβρ + ∂βFρα , (9.31)
is an antisymmetric 3-tensor itself, and hence it has only(43
)= 4 inde-
pendent components, as for instance those with strictly increasing indices:T012, T013, T023, T123.
With the Galilean frame Sg fixed and with the Fαβ given by (9.27), it iseasy to see that (9.29)1 summarize the homogeneous Maxwell’s equations.In fact, the latter can be obtained as indicated below:
⎧⎪⎪⎨⎪⎪⎩
(1c∂tH + curl E
)3,2,1
= 0 corresponding to indices 012, 013, 023,
div H = 0 corresponding to indices 123.
Concerning (9.29)2, from (9.27) and (9.30), we have
F 0i = −F0i = Ei , F ik = Fik = Hik , (9.32)
so that the contravariant components of F are given by
Fαβ ≡
⎛⎜⎝
0 E1 E2 E3
−E1 0 H3 −H2
−E2 −H3 0 H1
−E3 H2 −H1 0
⎞⎟⎠ . (9.33)
Taking into account (9.9): S0 = cρ, Si = ρvi, we see that (9.29)2 summa-rize the inhomogeneous Maxwell’s equations; more precisely
⎧⎪⎨⎪⎩
div E = 4πρ, corresponding to the index 0,(
curl H− 1c∂tE)
1,2,3
= 0 corresponding to indices 1, 2, 3.

9.4 Absolute Formulation of Maxwell’s Equations 317
Equation (9.29), besides representing (9.1) in any Galilean frame, are in-variant under linear transformation of the xα, and hence have a tensorialbehaviour in M4.1 Moreover, (9.29) contain the continuity equation (9.3)which, being of Eulerian type, can be written as
∂tρ+ div(ρe) = 0 . (9.34)
In fact, after differentiating (9.29)2 with respect to the index α and thencontracting this index, we have
∂α∂ρFαρ =
4πc∂αS
α ;
using now the symmetric property of the second derivatives ∂α∂ρ (Schwartztheorem), as well as the antisymmetric property of F , leads to ∂α∂ρF
αρ =0, implying the scalar (invariant) condition
∂αSα = 0 . (9.35)
Using (9.9), the latter equation can be written in the form
1c∂tS
0 + ∂iSi ≡ 1
c∂t(ρc) + ∂i(ρei) = 0 ,
which is exactly (9.34).Equation (9.35), having absolute meaning just as (9.34) from which
it has been derived, represents the charge conservation in any Galileanframe and for all the evolution of a charged continuous system, a propertysimilar to that of mass conservation of material systems. This is a differentproperty with respect to the invariance of the charge assumed by axiom I.Therefore, in M4, the two separated theories, classical electromagnetismand Newtonian mechanics, are naturally unified in a single theory withthe same invariance properties. The most important modifications haveconcerned mechanics: in fact, the unification of thermal and mechanicalaction has been obtained through the new idea of space and time (relative,and no more absolute quantities) as well as the identification of the twoconcepts of mass and energy, previously distinct.
For the electromagnetic field, we have the inclusion of the electric andmagnetic fields in the single electromagnetic tensor Fαβ as well as theunification of charge and current density through the vector Sα. More-over, there is a progress with respect to the classical situation. In fact,in the classical context every electromagnetic problem had to be formu-lated in the absolute space, or the Ether frame; relativistically, instead,all the Galilean frames are equally valid and indistinguishable, also for
1 Actually (9.29)1 are also invariant under general coordinate transformation be-cause they can be written as the exterior derivative of Fαβ (see e.g. [2]).

318 9 Relativistic Electromagnetism in Vacuum
electromagnetic phenomena. Thus, the Galilean frame is completely avail-able and the solution, once obtained in a certain Galilean frame, can thenbe automatically transferred to any other frame by simply performing achange of coordinates and using the relativistic transformation laws.
9.5 Homogeneous Form of Maxwell’s Equations
Let us multiply (9.29)1 (written with respect to a certain Cartesian coordinatesystem xα) for the Levi-Civita indicator εσραβ and contract the indices ρ, α, β.Using the antisymmetry of both ε and F we have
3εσραβ∂ρFαβ = 0 → ∂ρ(εσραβFαβ) = 0 .
After introducing the dual of F :
∗F σρ def=12εσραβFαβ , (σ, ρ = 0, 1, 2, 3) , (9.36)
which is still an antisymmetric tensor (because of the antisymmetry of ε),(9.29)1 assume the form
∂ρ∗F σρ = 0 ,
similar to the left-hand side of (9.29)2. Thus, the standard form of Maxwell’sequations is the following:
∂ρ∗Fαρ = 0, ∂ρF
αρ =4πcSα , (α = 0, 1, 2, 3) , (9.37)
where the same differential operator (a divergence) enters, also confirmingthat they are eight independent equations only. ∗F is obviously formed withthe electric and magnetic fields. In fact, using (9.27) and (2.139), we have
∗F 01 =12(ε0123F23 + ε0132F32) = ε0123F23 = F23,
∗F 02 = ε0231F31 = F31 ,∗F 03 = F12 ,
that is∗F 0i = Hi , (i = 1, 2, 3) ; (9.38)
analogously,
∗F 12 = F03 = −E3 ,∗F 23 = F01 = −E1 ,
∗F 31 = F02 = −E2,
or
− ∗F ik = Eik ≡
⎛⎝ 0 E3 −E2
−E3 0 E1
E2 −E1 0
⎞⎠ . (9.39)

9.5 Homogeneous Form of Maxwell’s Equations 319
Finally, the tensor ∗Fαβ is
∗Fαβ ≡
⎛⎜⎝
0 H1 H2 H3
−H1 0 −E3 E2
−H2 E3 0 −E1
−H3 −E2 E1 0
⎞⎟⎠ , (9.40)
and its completely covariant form ∗Fαβ is obtained by changing sign to theelements of the first row and the first column in the table (9.40); the compo-nents Fαβ follow, instead, by replacing in the table (9.40) H with E and Eik
with −Hik simultaneously.The matrix representation (9.40) can also be written in a more compact
form, using the definition (9.36). It is necessary to consider the natural de-composition of the Levi-Civita indicator with respect to the vector γ charac-terizing the frame.2 Such a decomposition, due to the antisymmetric propertyof ερσαβ , is necessarily linear in γα:
ερσαβ = ερσαβ + γσ εραβ − γρεσαβ + γαεσρβ − γβ εσρα , (9.41)
where the tensors ερσαβ and εραβ (with rank 4 and 3, respectively) are anti-symmetric and spatial, in the sense that they satisfy the following conditions:
ερσαβγβ = 0 , εραβγβ = 0 . (9.42)
Furthermore, using adapted coordinates to Sg (γ0 = 1, γi = 0), (9.42)1 reducesto ερσα0 = 0 and, because of its antisymmetry, it follows that ερσαβ vanishesidentically:
ερσαβ = 0. (9.43)
We notice that (9.43), directly verified using adapted coordinates, holds inany coordinate system, because ερσαβ is a tensor. Thus, the decomposition(9.41) becomes
ερσαβ = γσ εραβ − γρεσαβ + γαεσρβ − γβ εσρα , (9.44)
i.e. the only surviving quantity is the spatial and antisymmetric tensor εραβ .Such a tensor in a system of adapted coordinates has only nonvanishing com-ponents of the form εijk, with i, j, k = 1, 2, 3, and it assumes, in Σ, a rolesimilar to that played by the tensor (2.139) in M4: it is called the spatialLevi-Civita indicator.
Therefore, using (9.17) and (9.18), (9.36) implies the following decomposi-tion for ∗Fαβ :
∗Fαβ =12(γσ εραβHαβ − γρεσαβHαβ − εσρβEβ − εσραEα) ,
2 Actually one should consider the Ricci tensor when the coordinates are not Carte-sian. Here we have assumed Cartesian coordinates and the Ricci tensor coincideswith the Levi-Civita indicator.

320 9 Relativistic Electromagnetism in Vacuum
that is∗F σρ = −Eσρ + γσHρ − γρHσ , (9.45)
whereEσρ def= εσραEα , Hρ def=
12εραβHαβ . (9.46)
Equation (9.45), which gives the electric and magnetic fields in terms of ∗Fand γ (i.e. the frame Sg):
Hρ = −γσ∗F σρ , Eσρ = γσHρ − γρHσ − ∗F σρ , (9.47)
has a general validity, like (9.17). In a system of adapted coordinates it sum-marizes (9.40). Finally, we notice that passing from Fαβ to ∗Fαβ we have thereplacements Hαβ → −Eαβ and Eα → Hα, as already stated.
9.6 Transformation Laws of Electric and Magnetic Fields
Independent of the choice of the coordinates xα the decomposition (9.17) ofthe electromagnetic field is invariant with respect to the choice of the Galileanframe Sg (specified by γ). The decomposition of Fαβ along the unit timelikevector γ′ of another Galilean frame S′
g is therefore completely similar to (9.17):
Fαβ = H ′αβ + γ′αE
′β − γ′βE′
α , (9.48)
with the limitations
E′αγ
′α = 0 , H ′αβγ
′β = 0 , H ′αβ = −H ′
βα . (9.49)
We thus have the following (local) invariance property:
H ′αβ + γ′αE
′β − γ′βE′
α = Hαβ + γαEβ − γβEα = inv. , (9.50)
which gives the relation between the electric and magnetic fields, relative tothe two frames. In fact, by using the relations
γ′ =1α
(γ +
1cu), c′1 =
1α
(c1 +
u
cγ), α =
√1− u2
c2, (9.51)
or in components:
γ′β =1α
(γβ +
uβ
c
), (β = 0, 1, 2, 3) . (9.52)
Multiplying (9.50) by γ′α, contracting and then using (9.52) as well as (9.18)and (9.49) lead to
−E′β =
1α
[−Eβ +
1c(−γβu
αEα + uαHαβ)],

9.6 Transformation Laws of Electric and Magnetic Fields 321
that is
E′β =
1α
(Eβ +
1cHβαu
α +1cu · Eγβ
).
This formula can be expressed in Sg using a system of adapted coordinates(so that E0 = 0, H0α = 0, γ0 = −1) and recalling table (9.25); it results in
E′0 = − 1
αcu ·E , E′
i =1α
[Ei +
1c(u×H)i
].
After contracting these components now with the vectors cα (c0 = γ) andusing the notation η = 1/α, we have
E′ =1α
(E +
1cu×H +
1cu · Eγ
). (9.53)
This formula holds in M4 and hence cannot be used directly for measurementsperformed in different frames. However, we can consider the isometric boost ofΣ′ (to which E′ belongs) on Σ (to which E and u×H belong); this procedureis equivalent to interpret the components of E′ along the basis c′i of Σ′ ascomponents with respect to the basis ci of Σ.
We thus proceed to evaluate the components E′ · c′i, starting from (9.53).Using (9.51)2 and the relations c′2,3 = c2,3 and u = uc1, we have
⎧⎪⎪⎨⎪⎪⎩
E′ · c′1 =1α2
(E1 − β2E1) = E1,
E′ · c′2,3 =1α2
[E2,3 +
1c(u×H)2,3
].
(9.54)
Equation (9.54)1 can then be written as
E1 =1αE1 +
(1− 1
α
)E1 =
1αE1 +
α2 − 1α(α+ 1)
E1 =1αE1 −
1c2
u · Eα(1 + α)
u ;
then contracting (9.54) with the basis vectors ci of Σ, we have the represen-tation of E′ in Sg (which we still denote by E′):
E′ =1α
(E +
1cu×H− 1
c2u ·E1 + α
u). (9.55)
A similar relation can be derived for H, using the invariant decomposition(9.45) and repeating the above procedure. This is equivalent to replacing Hαβ
by −Eαβ and Eα by Hα. As for (9.55), we have the general relation:
H′ =1α
(H− 1
cu×E− 1
c2u ·H1 + α
u). (9.56)
It is meaningless to perform the limit c→∞ to obtain the classical relationscorresponding to (9.55) and (9.56); in fact, in the framework of ordinary elec-tromagnetism, the electric and magnetic fields only live in the Ether frame. In

322 9 Relativistic Electromagnetism in Vacuum
other words, the classical situation of a Galilean relativity is only compatiblewith a static theory of electromagnetism, with E and H having an invariantmeaning with respect to the choice of the Galilean frame; in addition, (9.1)and (9.2) do not contain anymore 1/c terms.
In the relativistic context, instead, as from (9.55) and (9.56), the fields E′
and H′ are functions of both E and H, exactly as are the force and the thermalpower in mechanics. Equations (9.55) and (9.56) show that, if in a frame onlythe electric field is present: H = 0, a magnetic field will appear in any otherframe: H′ = −1/(αc)u × E, even if very small. Equivalently, the conditionH = 0 (or E = 0) has no absolute meaning, and hence from a relativisticpoint of view a pure theory of the electric field or the magnetic field has nomeaning at all.
9.7 Invariants
The electromagnetic field Fαβ can be interpreted, in M4, as a vectorial map,and hence it has a set of determined eigenvalues and eigenvectors. It is con-venient to consider the mixed form: Fα
β , typical for a vectorial map, whichhas only a sign variation with respect to table (9.27) in the first row:
F 0β = −F0β , F i
β = Fiβ .
Thus, we have
Fαβ ≡
⎛⎜⎝
0 E1 E2 E3
E1 0 H3 −H2
E2 −H3 0 H1
E3 H2 −H1 0
⎞⎟⎠ ; (9.57)
with Fαβ are associated the following four invariants:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
I1 = Fαα = TrF,
I2 =12δρσαβF
αρF
βσ = −1
2Fα
ρFρ
α = −12I1(F 2),
I3 =13!δρσναβμF
αρF
βσF
μν ,
I4 = det ||Fαβ ||,
(9.58)
where δβ1···βkα1···αk
is the generalized Kronecker tensor already defined in Chap. 2:
δα1···αk
β1···βk= k!δα1
[β1· · · δαk
βk] . (9.59)
Only two of these invariants are meaningful, since
I1 = 0 , I3 = 0. (9.60)

9.7 Invariants 323
Equation (9.60)1 is evident; to show (9.60)2 we recall that any third orderantisymmetric matrix has always null determinant:
I3 =
∣∣∣∣∣∣0 E1 E2
E1 0 H3
E2 −H3 0
∣∣∣∣∣∣+∣∣∣∣∣∣
0 E1 E3
E1 0 −H2
E3 H2 0
∣∣∣∣∣∣+∣∣∣∣∣∣
0 E2 E3
E2 0 H1
E3 −H1 0
∣∣∣∣∣∣
+
∣∣∣∣∣∣0 H3 −H2
−H3 0 H1
H2 −H1 0
∣∣∣∣∣∣= E1(H3E2 −H3E2) + E1(−H2E3 +H2E3) + E2(H1E3 −H1E3) = 0 .
The other invariants I2 and I4 are nonzero:
I2 = −E21 − E2
2 − E23 +H2
3 +H22 +H2
1
orI2 = H2 − E2 ; (9.61)
I4 = −E1
∣∣∣∣∣∣E1 H3 −H2
E2 0 H1
E3 −H1 0
∣∣∣∣∣∣+ E2
∣∣∣∣∣∣E1 0 −H2
E2 −H3 H1
E3 H2 0
∣∣∣∣∣∣− E3
∣∣∣∣∣∣E1 0 H3
E2 −H3 0E3 H2 −H1
∣∣∣∣∣∣= −E1H1E ·H− E2H2E ·H− E3H3E ·H ,
that isI4 = −(E ·H)2 ≤ 0 . (9.62)
We then have the following invariance properties:
H2 − E2 = H ′2 − E′2 = inv. , E ·H = E′ ·H′ = inv. , (9.63)
which can also be directly verified using the transformation formulas (9.55)and (9.56).
Thus, for an electromagnetic field, we have to distinguish between the gen-eral case: I2,4 �= 0, and the special case in which one or both the invariantsvanish. When I4 = 0, the electric and magnetic fields are mutually orthogonalin any Galilean frame; if instead I2 = 0, then the two vectors E and H havethe same magnitude in any frame and hence they are always both present.
If there exists a Galilean frame in which the electric field (or the mag-netic field) vanishes, it is necessarily I4 = 0, but I2 should be nonvanishing;otherwise, the whole electromagnetic field vanishes identically. When both theinvariants are null, the electromagnetic field is said to be singular or radiative;in this case,
E ·H = 0 , H2 = E2 �= 0, ∀Sg . (9.64)
The invariants (9.61) and (9.62) can also be obtained by the products of Fwith itself or its dual ∗F. In fact, from (9.17):

324 9 Relativistic Electromagnetism in Vacuum
Fαβ = Hαβ + γαEβ − γβEα , Fαβ = Hαβ + γαEβ − γβEα ,
one gets FαβFαβ = HαβH
αβ−EβEβ−EαE
α, and using adapted coordinates(without any loss of generality, because the product FαβF
αβ is invariant), thelatter becomes
FαβFαβ = 2(H2 − E2) ≡ 2I2 . (9.65)
Analogously, from (9.45): ∗Fαβ = −Eαβ + γαHβ − γβHα, one has
Fαβ∗Fαβ = −HαβE
αβ − EβHβ − EαH
α,
which using (9.25) and (9.39) becomes
Fαβ∗Fαβ = −4E ·H ≡ −4
√−I4 . (9.66)
9.8 Energy Tensor of the Electromagnetic Field
From Maxwell’s equations (9.29)
∂ρFαβ + ∂αFβρ + ∂βFρα = 0 , ∂ρFαρ =
4πcSα , (9.67)
one can derive evolution equations similar to those of a continuous system.More precisely, consider the evolution problem of a charged continuous system,starting from given initial and boundary conditions. In M4 the continuumfollows a world tube T , characterized by the vector field S = ρ0V describingthe distribution of both charges and currents from an absolute point of view. Inturn, such a distribution generates inM4 (in the interior as well as the exteriorparts of T ) an electromagnetic field Fαβ , satisfying (9.67) and constrainingthe motion of the continuum itself through the Lorentz force. For the genericelement of the continuum one then has an autoinduced action represented, inagreement with (9.16), by the elementary force dKα:
dKα =1cdeFαβV
β =1cρ0dC0FαβV
β ,
with dC0 the proper volume element. After introducing the proper density of4-force
ρ0fαdef=
dKα
dC0, (9.68)
one then gets the following law:
ρ0fα =1cFαβS
β , (9.69)
which specifies the dependence of ρ0fα on both the electromagnetic field Fαβ
and the sources Sβ. Hence, in T one has new vector fields for the autoinducedmechanical action, in the sense that the continuum (conductor and charges)

9.8 Energy Tensor of the Electromagnetic Field 325
generates the electromagnetic field through Maxwell’s equations, and this, inturn, affects the motion of the continuum itself through the action (9.69); thelatter is, of course, sub-ordered to Maxwell’s equations (9.67). We can theneliminate the current density (9.69) and finally express fα in terms of Fαβ
and its first derivatives. More precisely, such a dependence can be put in adivergence form:
ρ0fα = −∂ρEαρ , (9.70)
where Eαρ is a 2-tensor built up by the electromagnetic field and still to be
determined. To prove (9.70) let us start from (9.67)2, which reduces (9.69) tothe form
ρ0fα =14πFαβ∂ρF
βρ =14π
[∂ρ(FαβFβρ)− F βρ∂ρFαβ ] . (9.71)
Transform then the last term in (9.71) using (9.67)1:
−F βρ∂ρFαβ = F βρ(∂αFβρ + ∂βFρα) = F βρ∂αFβρ + F βρ∂βFρα ,
that is, exchanging the indices ρ and β in the last product
−F βρ∂ρFαβ = F βρ∂αFβρ + F ρβ∂ρFβα ,
leads to−2F βρ∂ρFαβ = F βρ∂αFβρ ≡
12∂α(F βρFβρ) .
Equation (9.71) thus becomes
ρ0fα =14π
[∂ρ(FαβF
βρ) +14∂α(F βρFβρ)
],
which coincides with (9.70) after defining Eαβ as
Eαβ def=
14π
(FαρF
ρβ − 14δβαF
ρσFρσ
)≡ 1
4π
(FαρF
ρβ − 12δβαI2
). (9.72)
The tensor Eαβ is called the energy–momentum tensor of the electromagnetic
field Fαβ . It has vanishing trace:
I1(E) ≡ Eαα = 0 , (9.73)
and is symmetric, as one can easily see by considering the contravariant (orcovariant) form:
4πEαρ = FαβF
ρβ − 14mαρF βσFβσ . (9.74)
This is a quadratic homogeneous function of the electromagnetic field Fαβ ,and hence it is defined either in T , where it satisfies the conditions (9.70), orin the exterior of T , where one has the conservation conditions
∂ρEαρ = 0 . (9.75)

326 9 Relativistic Electromagnetism in Vacuum
9.9 Splitting of the Energy Tensorof the Electromagnetic Field
In relative terms, the energetic tensor (9.74) will be expressed, as Fαβ , interms of electric and magnetic fields. In fact, using the decomposition (9.17)of Fα
β :Fα
β = Hαβ + γαEβ − γβE
α,
one has, from Eq. (9.18),
FαβF
ρβ = HαβH
ρβ + γρHαβE
β + γαHρβEβ + γαγρEβEβ − EαEρ .
Taking into account (9.65), we then have
4πEαρ = HαβH
ρβ + γαHρβEβ
+γρHαβE
β − EαEρ + E2γαγρ − 12(H2 − E2)mαρ .
Consider now the decomposition of the metric tensor; because of its symmetry,we have
mαβ = mαβ + γαmβ + γβmα + mγαγβ ,
with the conditions mαβγα = 0, mαγα = 0. Contracting by γαγβ implies−1 = m; contracting then by γβ leads to γα = −mα + γα, so that mα = 0.Finally, the decomposition of the tensor mαβ is
mαβ = mαβ − γαγβ , (9.76)
and (9.76) becomes
4πEαρ = Mαρ + γαP ρ + γρPα +Wγαγρ , (9.77)
since⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
Mαρ def= −EαEρ +HαβH
ρβ − 12(H2 − E2)mαρ Maxwell’s stress tensor,
P ρ def= HρβEβ Poynting vector,
W def=12(E2 +H2) electromagnetic energy.
(9.78)Equation (9.77) represents the natural decomposition of the tensor 4πEαρ
along γ and onto Σ, the hypersurface normal to γ; the tensor Mαρ, like Eαρ,is symmetric and it is spatial as the vector Pα:
Mαργρ = 0, P ργρ = 0 .
Furthermore, using a system of adapted coordinates, from (9.76) one gets

9.10 Spectral Analysis of the Electromagnetic Tensor 327
mik = mik = δik, (i, k = 1, 2, 3) spatial metric . (9.79)
From (9.78)1,2 and using (9.25) one obtains the components of the Poyntingvector:
P i = (E×H)i ∼ P = E×H , (9.80)
as well as those of Maxwell’s stress tensor:
M ik = −EiEk −HiHk +Wδik . (9.81)
We notice that P is an eigenvector of M ik, associated with the eigenvalueW : M ikPk = WP i. The decomposition (9.77) as well as the various associ-ated spatial quantities all have a relative meaning, that is depending on thechosen Galilean frame γ. However, by changing the frame one would havea decomposition similar to (9.77) and (9.78), apart from the addition of anoverall prime. At this point, given the general formulas (9.55) and (9.56), oneshould determine the transformation laws of the various quantities (9.78); inparticular one can show that there exist an infinite number of Galilean framesin which the Poynting vector vanishes.
We notice that the relative law (9.77) for the energetic tensor of an electro-magnetic field is formally analogous to those of a polar continuous medium,with heat conduction; this analogy allows to compare the two schemes, evenif so different. Moreover, besides the analogies, we recall that the energetictensor (9.77) is also defined in the exterior of the world tube T associatedwith the sources; for a material continuum the energetic tensor has insteadno meaning in the exterior region, that is outside matter.
9.10 Spectral Analysis of the Electromagnetic Tensor
Definition (9.72) implies that the spectral analysis of the energetic tensorEαβ is strictly related to that of the electromagnetic field Fαβ , which hasonly two nonvanishing invariants. In fact, the characteristic equation for Fαβ
is biquadratic:λ4 + I2λ
2 + I4 = 0 , (9.82)
with ⎧⎪⎪⎨⎪⎪⎩I2 =
12FαβF
αβ = H2 − E2,
I4 = −14
(12Fαβ
∗Fαβ
)2
= −(E ·H)2 ≤ 0.(9.83)
Equation (9.82) in the case I22 −4I4 �= 0 (that is, excluding the case I2 = I4 =
0) has two roots for x = λ2, one positive and the other negative:
x1 =12
(−I2 +
√I22 − 4I4
)> 0, x2 = −1
2
(I2 +
√I22 − 4I4
)< 0 , (9.84)

328 9 Relativistic Electromagnetism in Vacuum
so that the electromagnetic field has two real opposite eigenvalues ±λ1 andtwo purely imaginary eigenvalues ± iλ2:⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
λ1 =
√12
(−I2 +
√I22 − 4I4
)> 0,
λ2 =
√12
(I2 +√I22 − 4I4
)> 0.
(9.85)
Moreover, F can be decomposed (even if not uniquely, see Chap. 2) in thesum of two orthogonal bivectors F1 and F′
1:
F = F1 + F′1 , (9.86)
with F1 ∈ Π, a hyperbolic 2-plane invariant for F1, and F′1 ∈ Π′, an elliptic
2-plane invariant for F′1, being Π and Π′ orthogonal to each other: F1(Π′) = 0
and F′1(Π) = 0.
From the vectorial map point of view, F1 ∈ Π (hyperbolic) has two real nulleigenvectors, while F ′
1 ∈ Π′ (elliptic) has no real eigenvectors. Equivalently,Fαβ admits, in general, only two real eigenvectors, both of them null; theseare associated to the real eigenvalues ±λ1. Such two directions reduce to asingle one, when Π is parabolic: I2(F1) = 0; in this case, Π′ also becomesparabolic, i.e. I2(F ′
1) = 0.However, with respect to the orthogonal decomposition (9.86) the following
general relations hold:
I2 = I2(F1) + I2(F ′1) , I4 = I2(F1) · I2(F ′
1) , (9.87)
so that the two isotropic directions of Π reduce to a single one if and only ifI2 = 0 and I4 = 0, that is λ1 = 0 and λ2 = 0. This case is called radiative: Fαβ
reduces to a bivector (I4 = 0) of parabolic type (I2 = 0). In other words, theabove-mentioned property of the electromagnetic field can also be expressedas follows: every electromagnetic field Fαβ admits only two eigendirections,both isotropic, which coincide only in the radiative (singular) case.
Excluding the singular case, the components Fαβ of F (i.e. the coefficients of
the associated vectorial map) are simplified when referring to an orthonormalbasis {dα} adapted to the two planes Π and Π′, in the sense that
d0,1 ∈ Π , d2,3 ∈ Π′ . (9.88)
In this case, the transformed vectors Fβ = (d)Fαβdα have the form
F0 = λd1 , F1 = ρd0 , F2 = μd3 , F3 = νd2 ,
so that the matrix (d)Fαβ turns out to be
(d)Fαβ =
⎛⎜⎝
0 ρ 0 0λ 0 0 00 0 0 ν0 0 μ 0
⎞⎟⎠ .

9.11 Spectral Analysis of the Energy Tensor of the Electromagnetic Field 329
From this representation, one can write the associated completely covariantform (only the elements of the first row change sign); because of the antisym-metry of the electromagnetic tensor, one finds ρ = λ and μ = −ν. Thus, forany choice of the adapted basis (9.88) the matrix Fα
β is given by
(d)Fαβ =
⎛⎜⎝
0 λ 0 0λ 0 0 00 0 0 −μ0 0 μ 0
⎞⎟⎠ ∼ (d)Fαβ =
⎛⎜⎝
0 λ 0 0−λ 0 0 00 0 0 −μ0 0 μ 0
⎞⎟⎠ . (9.89)
Therefore, (d)Fαβ results to be expressed in terms of the two scalars λ and μ
which are invariants, because of the relations
I2 = −λ2 + μ2 , I4 = −λ2μ2 . (9.90)
Comparing (9.90) with (9.85) one gets λ2 = λ21 and μ2 = λ2
2.Equation (9.89) is the canonical form of the electromagnetic tensor; the
singular case in which the two characteristic 2-planes Π and Π′, in spite ofbeing orthogonal, are both of parabolic type and have a common isotropicdirection lα, is excluded. In fact, in this case there are no orthogonal adaptedbases and Fαβ is necessarily a parabolic bivector, which can be written as
Fαβ = ξ(lαvβ − lβvα) . (9.91)
Here ξ is an arbitrary factor (a multiplicative parameter for the isotropicvector lα) and vα is a spatial vector, orthogonal to l (like all the vectors in Πand Π′), which can be assumed to be normalized to 1:
v2 = vβvβ = 1 , (9.92)
because in (9.91) v can always be scaled by an arbitrary factor re-absorbedthen in ξ.
9.11 Spectral Analysis of the Energy Tensorof the Electromagnetic Field
We pass now to study the decomposition of the energetic tensor Eαβ , a second-degree homogeneous function of Fαβ :
4πEαβ = FαρFβρ − 1
4mαβ(FρσF
ρσ) ,
that is, as from (9.83):
4πEαβ = −FαρFρβ −
12I2mαβ . (9.93)

330 9 Relativistic Electromagnetism in Vacuum
In fact, Fαβ considered as a vectorial map, induces either in Π or Π′ theorthogonal affinity, and the quadratic form of Eαβ implies that it has eigendi-rections belonging to Π or to Π′ only. Thus, the tensor Eαβ , different fromFαβ , is diagonal, and it admits ∞2 orthogonal tetrads. The latter are the or-thonormal bases (9.88) adapted to Π and Π′, for which an arbitrary rotationis still possible in both planes.
As concerns the eigenvalues, excluding the singular case, which will be ex-amined later, it is clear that there are two distinct eigenvalues, say λ and λ′,each of them with multiplicity 2. Furthermore, since I1(Eα
β) = 0, they arenecessarily opposite: λ = −λ′.
Let us determine, first, the eigenvalue of Eαβ for the directions in Π. Denoteby u ∈ Π the null eigenvector of Fαβ associated with the eigenvalue λ1 givenby (9.85)1; from (9.93) it follows that
4πEαβuβ = −λ2
1uα −12I2uα ;
hence, u is eigenvector of 4πEαβ , associated with the eigenvalue
λ = −λ21 −
12I2 = −1
2
√I22 − 4I4 .
Next, assuming
k =12
√I22 − 4I4 ≥ 0 , (9.94)
in the general case (k > 0) the eigenvalues of 4πEαβ are −k,−k, k, k, and thematrix (d)Eα
β of the components with respect to the tetrad (9.88) is given by
4π(d)Eαβ =
⎛⎜⎝−k 0 0 00 −k 0 00 0 k 00 0 0 k
⎞⎟⎠ ∼ 4π(d)Eαβ =
⎛⎜⎝k 0 0 00 −k 0 00 0 k 00 0 0 k
⎞⎟⎠ .
(9.95)Clearly, both forms (9.89) and (9.95), having a general meaning, are referred toan orthonormal basis {d(ρ)}3 which essentially depends on the point E ∈M4
in which the electromagnetic field is evaluated, exactly as the two planes Πand Π′.
If, from (9.89) and (9.95), one needs Cartesian components along a fixedbasis cα, it is enough to decompose the vectors d(ρ) as
d(ρ) = dα(ρ)cα , (9.96)
and use the transformation laws (both Eαβ and Fαβ are tensors):
Eαβ = dα(ρ)d
β(σ)
(d)E(ρ)(σ) , Fαβ = dα(ρ)d
β(σ)
(d)F (ρ)(σ) . (9.97)
3 The index in parenthesis is not a tensorial index but only ordinal.

9.12 Electromagnetic 4-Potential. Gauge Invariance 331
The canonical general forms for F and E also follow:
Fαβ = λ(dα(0)d
β(1) − dβ
(0)dα
(1))− μ(dα(2)d
β(3) − dβ
(2)dα
(3)) ,
4πEαβ = k(dα(0)d
β(0) − dα
(1)dβ
(1) + dα(2)d
β(2) + dα
(3))dβ(3) . (9.98)
Finally, in the singular case, one has
4πEαβ = FαρF
βρ = ξ2(lαvρ − lρvα)(lβvρ − lρvβ) = ξ2lαlβvρv
ρ ,
or, using (9.92),4πEαβ = ξ2lαlβ . (9.99)
9.12 Electromagnetic 4-Potential. Gauge Invariance
Let us consider now the homogeneous Maxwell’s equations (9.29)1:
∂ρFαβ + ∂αFβρ + ∂βFρα = 0 , ∀E ∈M4 ; (9.100)
they are satisfied identically in M4, when the electromagnetic field admits avector potential φα(x), defined and regular all over M4; in that case, Fαβ canbe expressed by the following relation:
Fαβ = ∂αφβ − ∂βφα. (9.101)
In fact, the Schwartz theorem allows to commute partial derivatives, so that∂ρFαβ = ∂ρ∂αφβ − ∂β∂ρφα, and the proof only requires a cyclic permutationof the indices ρ, α and β.
The representation (9.101) has a general validity in the neighbourhood ofany point E ∈ M4, in the sense that (9.100) necessarily imply (9.101). Thisis a general property of closed differential forms of any order (see e.g. [3],p. 37): the electromagnetic field, being antisymmetric, defines a second-orderdifferential form, which is closed because of (9.100) and from this, the existenceof a local potential vector.
The vector field φα(x) defined by (9.101) is called the 4-potential of theelectromagnetic field Fαβ ; more precisely, it is only one of the 4-potentials ofthe electromagnetic field Fαβ because it is not uniquely defined by (9.101)(exactly as the scalar potential of a conservative force). In fact, every fieldlike
φ′α = φα + ∂αϕ , (9.102)
with ϕ(x) a scalar (invariant) function, still satisfies (9.101):
∂αφ′β − ∂βφ
′α = ∂αφβ − ∂βφα = Fαβ ,
for any choice of the potential ϕ(x). In other words, the 4-potential φα(x) de-fined by (9.101) is not intrinsically related to the electromagnetic field Fαβ , but

332 9 Relativistic Electromagnetism in Vacuum
it can undergo a transformation φα → φ′α, as in (9.102), with ϕ an arbitraryscalar potential. This is called the gauge invariance of the electromagnetic fieldwith respect to its vector potential and shows that, to describe the field Fαβ
through (9.101), the components φα(x) are not completely arbitrary: one hasat disposal the function ϕ(x); hence the independent components of φα areonly three. One can then impose a priori an additional differential conditionto the 4-potential which in no way influences the electromagnetic field. Thechoice of such a condition is often related to the inhomogeneous Maxwell’sequations, in order to simplify their form, for instance.
In fact, writing such equations in terms of φα gives
∂ρ(∂αφρ − ∂ρφα) =4πcSα ,
that is∂α(∂ρφρ) = ∂ρ∂ρφα +
4πcSα .
In this form, the inhomogeneous Maxwell’s equations show a scalar field, givenby the four-dimensional divergence of φ = (φρ)4:
Divφ = ∂ρφρ = mρσ∂ρφσ =
12mρσ(∂ρφσ + ∂σφρ) , (9.103)
as well as a second-order differential operator: the D’Alembert operator, withparameter c (wave equation for light):
�cdef= mρσ∂ρ∂σ = δik∂i∂k −
1c2∂2
tt . (9.104)
Using such a notation (9.29)2 become
∂α(Divφ) = �c φα +4πcSα , (α = 0, 1, 2, 3) . (9.105)
It is then quite natural to choose the supplementary condition for the 4-potential as
(Divφ) = 0 , ∀E ∈M4 , (9.106)
which is known as Lorentz gauge condition. The latter can be satisfied ininfinite ways, taking into account the transformation (9.102) and with a properchoice of the arbitrary function ϕ. More precisely, assuming that (9.106) is notdirectly satisfied by the potential φα, one has to require such a condition forthe transformed function φ′α, imposing that ϕ is a solution of the differentialequation
�c ϕ = −12mρσ(∂ρφσ + ∂σφρ) ,
4 Note that Div and Grad operations correspond to divergence and gradient in thespace-time.

9.13 The Material and the Electromagnetic Schemes 333
with the right-hand side of this equation a known function of xα. Summarizing,Maxwell’s equations (9.29) can also be written as:
�cφ = −4πc
S , Divφ = 0 , ∀E ∈M4 , (9.107)
without any restriction on the electromagnetic field, given a posteriori by(9.101). Equations (9.107), like (9.29), imply that the source S satisfies, inthe world tube T ∈ M4, the conservation equation
Div S = 0 , ∀E ∈ T , (9.108)
and, from this point of view, the differential condition (9.108) is a directconsequence of the field equations (9.107). If one assumes, instead, (9.107)1and (9.108) as field equations then
�c φ = −4πc
S , ∀E ∈M4, Divφ = 0 , ∀E ∈ T , (9.109)
implying no longer (9.107)2, but the more general differential condition
�c(Divφ) = 0 , ∀E ∈M4 .
The latter, in turn, under regularity conditions at the infinity (a fact whichshould be better specified), is equivalent to the Lorentz condition: Divφ = 0.
We notice the close analogy between (9.109)1, i.e. the vectorial equationin M4: �c φ = −4π/cS, and the Poisson equation: apart from the differentsecond-order differential operator �c, which reduces to Δ2 in the limit c→∞,the analogy between the gravitational field and the electromagnetic one iscomplete when φ→ U , S→ μ, 1/c→ f (Newtonian gravitational constant).As we see here, to the single gravitational potential, in the electromagneticanalogy, corresponds the four potentials φα. In general relativity we will have alarger number of potentials, from 1 to 10: U → gαβ , and in the so-called unifiedtheories (geometrization of the gravitational field and the electromagneticone), the potentials become 14, at least.
9.13 The Material and the Electromagnetic Schemes
We have already seen that the Lorentz 4-force comes from a superpotentialEαβ :
− ρ0fα = ∂ρE
αρ , (9.110)
which is closely related to the electromagnetic field Fαβ :
4πEαρ = FαβF
ρβ − 14mαρF , F = FρσF
ρσ , (9.111)

334 9 Relativistic Electromagnetism in Vacuum
but Fαβ and Eαβ are not in 1–1 correspondence, because (9.111) are notdirectly invertible. Equations (9.110) are the conservation equations for theelectromagnetic field, like the similar equations for material continuous sys-tems:
μ0fαm = ∂ρM
αρ ; (9.112)
(9.112) have also the meaning of evolution equations for the material system,different from (9.110) which only summarize the action autoinduced from theelectromagnetic field governed by Maxwell’s equations.
Clearly, the analogy between (9.110) and (9.112) is purely formal, becausethe two tensor fields Eαρ and Mαρ have an algebraic structure completelydifferent, in agreement with the two distinct schemes, the one material andthe other electromagnetic. More precisely, while Mαρ is represented by
Mαρ = μ0VαV ρ +Xαρ (9.113)
and summarizes the mechanical characteristics of the continuous system: μ05:
total material density, V: 4-velocity and Xαβ: proper mechanical stress ten-sor, the field (9.111), instead, does not summarize all the ingredients of theelectromagnetic scheme, at least for two reasons: it is only partially related toFαβ and totally ignores the distribution of charges and currents as describedby the function S = ρ0V.
In other words, (9.110) are simple algebraic consequences of Maxwell’s equa-tions, considered as evolution equations for the electromagnetic field as wellas the charged continuous material, which generates it.
Similarly, the autoinduced field fα given by (9.69) only partially substitutesthe sources Sα: in fact, even if (9.69) are invertible, because of the conditiondet ||Fαβ || �= 0, the vectors fα and Sα are orthogonal. Moreover, apart fromthe different role of (9.110) and (9.112) as well as that of the tensor fields Eαβ
and Mαβ the (local) algebraic structure of such tensors is different. To seethis, we can compare the decompositions of the two tensors, inside the worldtube T , described by charges and currents.6
Thus, from one side we have (9.113), where V is an eigendirection of Mαβ ,since XαβVβ = 0, (α = 0, 1, 2, 3); from the other side, from (9.77), evaluatedin the proper frame of the generic charged element, that is for γ = V/c, wehave
4πEαρ =1c2W0V
αV ρ +1c(Pα
0 Vρ + P ρ
0 Vα) +Mαρ
0 , (9.114)
with an obvious meaning of symbols.We see that the structure of the tensor Eαρ is more general with respect to
that of the energetic tensor associated with an ordinary continuous scheme (i.e.nonpolar). In fact, (9.114) assumes, for each E ∈ T , two preferred directions:V (4-velocity of the charge) and P0 (proper Poynting vector); the former is5 We assume here no thermal conduction stresses for simplicity.6 Note that for the material continuous system the energetic tensor has no meaning
outside T .

9.14 Evolution Equations for a Charged Material System 335
temporal while the latter spatial, because of the orthogonality condition: P0 ·V = 0. This then represents the energetic tensor associated with a continuoussystem, with internal structure of vectorial type, that is with a “director” P0.In different words, (9.114) implies the following coordinate 4-stresses:
Tα = 4πEαρcρ , (9.115)
analogous to (7.12)Tα = Xα +QαV , (9.116)
with
Xα = Mα0 +
1cP0V
α , Qα =1cPα
0 +1c2W0V
α ; (9.117)
hence, the purely mechanical 4-stresses do not satisfy axiom VI:
Xαβ = Mαβ0 +
1cV αP β
0 �= Xβα .
Therefore, the problem of unification of the two relativistic schemes, mate-rial continuum and electromagnetic field, if really solvable, should be framedin the context of polar continua. This implies the loss of the spatial reci-procity axiom VI and hence the enlargement of the continuum scheme fromthe geometrical–kinematical point of view, introducing as a “director” theproper heat conduction vector, which has the Poynting vector as a counter-part in the electromagnetic field. However, in this case, polarity has a differ-ent meaning with respect to the classical situation, because the mechanical4-stress tensor is assumed to be nonsymmetric, different from the ordinarystress tensor, which is instead symmetric.
Another enlargement of the scheme, even from a dynamical point of view,is obtained by introducing “pairs” (mass or contact pairs, both mechanical orthermal) and rejecting the reciprocity axiom III: these are relativistic polarcontinua, in the most general sense, that is with nonsymmetric energetic ten-sor, and consequent asymmetry of the ordinary stress tensor as well as of themomentum of stress tensor.
9.14 Evolution Equations for a Charged Material System
Let us consider now, from a general point of view, the evolution of a chargedcontinuum material system in the absence of thermal stresses; this is a mixedscheme in which, besides the thermodynamical complication, there is a directcoupling between matter and electromagnetic field [4]. More precisely, theenergetic tensor of the material system,
Mαβ = μ0VαV β +Xαβ , (9.118)

336 9 Relativistic Electromagnetism in Vacuum
is sub-ordered to the evolution equations:
∂ρMαρ = μ0f
αm + ρ0f
α , (α = 0, 1, 2, 3) , (9.119)
where the sources, at the right-hand side, include either the mass force (inter-nal and external, of mechanical and of thermal type) or the mechanical actioninduced by the electromagnetic field on the continuum, given by (9.69):
ρ0fα =
1cFαβSβ . (9.120)
This, in turn, is built by the electromagnetic tensor Fαβ and the associatedsources Sα, both constrained by Maxwell’s equations. Thus, the complete setof equations is the following:
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
∂ρMαρ = μ0f
αm + ρ0f
α , ρ0fα =
1cFαβSβ ,
∂ρFαβ + ∂αFβρ + ∂βFρα = 0,
∂ρFαρ =
4πcSα,
(9.121)
where, besides the initial and boundary conditions, the energetic tensorMαρ isthe same as in (9.118), and the mass force fα
m is assigned. It is clear that, from(9.121), the coupling between the two fields (material and electromagnetic) isonly through the Lorentz force fα, also expressed as follows:
ρ0fα = −∂ρE
αρ ,
with Eαρ a well-determined function of the electromagnetic field Fαβ as in(9.111). Therefore, the final set of general equations (9.121) for the couplingof matter and charge assumes the form
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
∂ρ(Mαρ + Eαρ) = μ0fαm ,
∂ρFαβ + ∂αFβρ + ∂βFρα = 0,
∂ρFαρ =
4πcSα,
(9.122)
and the interaction between the two fields is governed by the energetic tensorof the electromagnetic field:
4πEαρ = FαβF
ρβ − 14mαρFρσF
ρσ . (9.123)
Finally, (9.107) gives rise to the reduced set of equations:

9.14 Evolution Equations for a Charged Material System 337
∂ρ(Mαρ + Eαρ) = μ0fαm , �c φ = −4π
cS , Divφ = 0 , (9.124)
in terms of the potential vector φ, which is used to express Fαβ and henceEαβ .
Moreover, (9.122) shows that for the continuum one still has conservationequations as (9.112):
∂ρEαρ = μ0f
αm , (9.125)
where Eαρ is the total energetic tensor:
Eαρ def= Mαρ + Eαρ
≡ μ0VαV β +Xαβ +
14π
(Fα
βFρβ − 1
4mαρFρσF
ρσ
), (9.126)
that is the sum of the energy–momentum tensors: material and electromag-netic; explicitly, in the matter case:
Eαρ =(μ0 +
14πc2
W0
)V αV ρ +Xαρ
+14πMαρ
0 +1
4πc(V αP ρ
0 + V ρPα0 ) . (9.127)
As we have already seen, for a neutral continuous system, (9.125) can beinterpreted as conservation equations (with sources, in the region internal tomatter, and without sources in the exterior) for the linear momentum and thetotal energy of the system: matter plus electromagnetic field. More precisely, inany Galilean frame, (9.125) give rise to the conservation of linear momentumand energy for the set of three fundamental fields: pure matter, internal tension(either of mechanical or thermal type) and electromagnetic, with energetictensors: μ0V
αV ρ, Tαβ = μc,0VαV β +Xαβ and Eαβ , respectively; they should
be considered in their form, associated with the chosen Galilean frame andfrom here, the total matter density: μ = μ+μc +μe, the total energy density:με = μc2, the total coordinate stresses (material and Maxwell’s), etc.
Besides the mixing of the various energetic forms and linear momentum, wenotice that the coupling which we have been considering here grounds on thehypothesis that in the interior of the material continuum one can assume thevacuum Maxwell’s equations as holding. Properly speaking, in the presenceof matter in place of H and E one has to consider the electric and magneticinduction, that is the induced electromagnetic field, which is related to thepermeability (electric and magnetic) of the considered matter; similarly, oneshould specify if the material is a conductor, the ordinary Ohm law, etc.
Thus, the set of equations (9.123) does not represent the general (com-plicated) coupling of the two fields (matter and charge): one has to specifyfor example the constitutive equations, so that practically one should look atthem as a first approach to a more general problem.

338 9 Relativistic Electromagnetism in Vacuum
References
1. C. Cattaneo, Complementi di relativita, Ed. La Goliardica, Roma (1978). 3112. G. Ferrarese, Introduzione alla dinamica Riemanniana dei sistemi continui, Ed.
Pitagora, Bologna (1981). 313, 3173. A. Lichnerowicz, Theorie globale de connecxions et des groupes d’holonomie, Ed.
Cremonese, Roma (1962). 3314. A. Lichnerowicz, Theories relativistes de la gravitation et de l’electromagnetisme,
Ed. Masson, Paris (1955). 335

Index
Born rigidity, 201
Cattaneo’s transverse covariantderivative, 299
Cauchy equation, 267, 274, 275, 279,284–286
Cauchy theorem, 208Central forces, 158Clifford’s algebra, 97Complementary map, 64Conjugate map, 64Conservative forces, 115Coriolis theorem, 58
Doppler effect, 13, 57, 141
Eigenvalues and eigenvectors, 62Entropy, 217, 219, 221, 223Ether, 11Extended relativity principle, 21, 24,
120, 124, 309
Fourier equation, 220, 304Free energy, 218Frenet–Serret, 154Frenet-Serret, 147, 149, 150, 153, 154,
156Fresnel-Fizeau experiment, 14, 57
Galilean principle of relativity, 7, 24Galilean transformation laws, 7Gauge transformations, 331General Lorentz transformations, 45,
67, 97
Hamilton-Cayley identity, 64
Internal energy, 210, 217, 219, 221–223Inverse map, 64Isotropic continuous systems, 214, 215,
224, 226–229, 237
Lagrangian coordinates, 169, 176, 178,180, 182, 184, 186, 187, 190, 191,193, 205
Lame constants, 228Levi-Civita indicator, 65Lightcone, 31Lorentz contraction, 50Lorentz factor, 40Lorentz force, 8, 311, 313, 324, 336Lorentz transformations, 29
Maxwell’s equations, 8Michelson-Morley experiment, 2, 12, 17,
58Minkowski metric tensor, 30
Norm of a vector, 28
Optical aberration, 12, 56Ordinary continuous systems, 242, 246
Particle, 110Perfect fluids, 220Perfect gases, 222Piola-Kirchhoff characteristics, 216, 234Positional forces, 115Proper time, 38
Quasi-orthonormal bases, 147, 153

340 Index
Restricted problems, 6, 127, 139, 163,233
Reversible transformations, 290
Ricci tensor, 65
Shear, 175, 195
Space-time splitting techniques, 244
Special Lorentz transformations, 45
Thermodynamics, first law, 218, 219,251, 258, 261, 264, 269, 284, 286,290
Thermodynamics, second law, 217Thomas precession, 203Time dilation, 50
Unified scheme, 136
Vectorial maps, 60Vorticity tensor, 176