-
Hindawi Publishing CorporationJournal of Applied
MathematicsVolume 2013, Article ID 810729, 11
pageshttp://dx.doi.org/10.1155/2013/810729
Research ArticleNew Exact Solutions of Ion-Acoustic Wave
Equations by(𝐺/𝐺)-Expansion Method
Wafaa M. Taha, M. S. M. Noorani, and I. Hashim
School of Mathematical Sciences, Universiti Kebangsaan Malaysia
UKM, 43600 Bangi, Selangor, Malaysia
Correspondence should be addressed to Wafaa M. Taha; wafaa
[email protected]
Received 24 May 2013; Revised 19 September 2013; Accepted 20
September 2013
Academic Editor: Saeid Abbasbandy
Copyright © 2013 Wafaa M. Taha et al.This is an open access
article distributed under the Creative Commons Attribution
License,which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly
cited.
The (𝐺/𝐺)-expansion method is used to study ion-acoustic waves
equations in plasma physic for the first time. Many new
exacttraveling wave solutions of the Schamel equation, Schamel-KdV
(S-KdV), and the two-dimensional modified KP
(Kadomtsev-Petviashvili) equation with square root nonlinearity are
constructed. The traveling wave solutions obtained via this method
areexpressed by hyperbolic functions, the trigonometric functions,
and the rational functions. In addition to solitary waves
solutions,a variety of special solutions like kink shaped, antikink
shaped, and bell type solitary solutions are obtained when the
choice ofparameters is taken at special values. Two- and
three-dimensional plots are drawn to illustrate the nature of
solutions. Moreover,the solution obtained via this method is in
good agreement with previously obtained solutions of other
researchers.
1. Introduction
The ion-acoustic solitary wave is one of the
fundamentalnonlinear waves phenomena appearing in fluid dynamics
[1]and plasma physics [2]. To allowing for the trapping of someof
the electrons on ion-acoustic waves, Schamel proposed amodified
equation for ion-acoustic waves [3] given by
𝑢𝑡+ 𝑢1/2𝑢𝑥+ 𝛿𝑢𝑥𝑥𝑥
= 0, (1)
where 𝑢 is thewave potential and 𝛿 is a constant, this
equationdescribing the ion-acoustic wave, where the electrons do
notbehave isothermally during their passage of the wave in
acold-ion plasma. Then, combining the equations of Schameland the
KdV equation, one obtains the so-called one-dimensional form of the
Schamel-KdV (S-KdV) equationequation [4, 5]:
𝑢𝑡+ (𝛼𝑢
1/2+ 𝛽𝑢) 𝑢
𝑥+ 𝛿𝑢𝑥𝑥𝑥
= 0, 𝛿𝛽 ̸= 0, (2)
where 𝛽, 𝛼, and 𝛿 are constants. This equation is establishedin
plasma physics in the study of ion acoustic solitonswhen electron
trapping is present, and also it governs theelectrostatic potential
for a certain electron distribution in
velocity space. Note that we obtain the KdV equation when𝛼 = 0
and the Schamel equation when 𝛽 = 0 for 𝛿 = 1.Due to the wide range
of applications of (2), it is importantto find new exact wave
solutions of the Schamel-KdV (S-KdV) equation. Another equation
arising in the study ofion-acoustic waves is the so-called modified
Kadomtsev-Petviashvili (KP) equation given by [6]
(𝑢𝑡+ 𝛼𝑢1/2𝑢𝑥+ 𝛽𝑢𝑥𝑥𝑥
)𝑥+ 𝛿𝑢𝑦𝑦
= 0. (3)
Equation (3) was firstly derived by Chakraborty andDas [7]; the
modified KP equation containing a square rootnonlinearity is a very
attractive model for the study of ion-acoustic waves in a
multispecies plasma made up of non-isothermal electrons in plasma
physics.
In the literature, theKP equation is also known as the
two-dimensional KdV equation [8].
It has lately become more interesting to obtain exactanalytical
solutions to nonlinear partial differential equationssuch as the
one arising from the ion-acoustic wave phe-nomena, by using
appropriate techniques. Several importanttechniques have been
developed such as the tanh-method [9,10], sine-cosine method [11,
12], tanh-coth method [13], exp-functionmethod [14],
homogeneous-balancemethod [15, 16],
-
2 Journal of Applied Mathematics
Jacobi-elliptic function method [17, 18], and
first-integralmethod [19, 20] to solve analytically nonlinear
equations suchas the above ion-acoustic wave equations.
Moreover, in the standard tanh method developed byMalfliet in
1992 [21], the tanh is used as a new variable. Sinceall derivatives
of a tanh are represented by tanh itself, thesolution obtained by
this method may be solitons in termsof sech2 or may be kinks in
terms of tanh. We believe thatthe (𝐺/𝐺)-expansion method is more
efficient than the tanhmethod. Moreover, the tanh method may yield
more thanone soliton solution, a capability which the tanh
methoddoes not have. The sine-cosine method yields a solutionin
trigonometric form. The Exp-function method leads toboth
generalized solitary solution and periodic
solutions.Thehomogeneous-balancemethod is a generalized tanh
functionmethod for many nonlinear PDEs. The first integral
method,which is based on the ring theory of commutative algebra,was
first proposed by Feng. There is no general theory tellingus how to
find its first integrals in a systematic way; so, akey idea of this
approach to find the first integral is to utilizethe division
theorem.The traveling wave solutions expressedby the
(𝐺/𝐺)-expansion method, which was first proposedby Wang et al.
[22], transform the given difficult probleminto a set of simple
problems which can be solved easily toget solutions in the forms of
hyperbolic, trigonometric, andrational functions. The main merits
of the (𝐺/𝐺)-expansionmethod over the other methods are as
follows.
(i) Higher-order nonlinear equations can be reduced toODEs of
order greater than 3.
(ii) There is no need to apply the initial and
boundaryconditions at the outset. The method yields a
generalsolution with free parameters which can be identifiedby the
above conditions.
(iii) The general solution obtained by the (𝐺/𝐺)-expan-sion
method is without approximation.
(iv) The solution procedure can be easily implemented
inMathematica or Maple.
In fact, the (𝐺/𝐺)-expansion method has been success-fully
applied to obtain exact solution for a variety of NLPDE[23–34].
In this paper, the (𝐺/𝐺)-expansion method is used tostudy
ion-acoustic waves equations in plasma physic for thefirst time.We
obtainmany new exact traveling wave solutionsfor the Schamel
equation, S-KdV, and the two-dimensionalmodified KP equation.The
traveling wave solutions obtainedvia this method are expressed by
hyperbolic functions,the trigonometric functions, and the rational
functions. Inaddition to solitary waves solutions, a variety of
specialsolutions like kink shaped, antikink shaped, and bell
typesolitary solutions are obtained when the choice of parametersis
taken at special values. Two- and three-dimensional plotsare drawn
to illustrate the nature of solutions. Moreover, thesolution
obtained via this method is in good agreement withpreviously
obtained solutions of other researchers.
Our paper is organized as follows: in Section 2, we presentthe
summary of the (𝐺/𝐺)-expansionmethod, and Section 3describes the
applications of the (𝐺/𝐺)-expansion methodfor Schamel equation,
S-KdV equation, and modified KPequation, and lastly, conclusions
are given in Section 4.
2. Summary of the (𝐺/𝐺)-Expansion Method
In this section, we describe the (𝐺/𝐺)-expansion methodfor
finding traveling wave solutions of NLPDE. Suppose thata nonlinear
partial differential equation in two independentvariables, 𝑥 and 𝑡,
is given by
𝑝 (𝑢, 𝑢𝑡, 𝑢𝑥, 𝑢𝑥𝑡, 𝑢𝑡𝑡, 𝑢𝑥𝑥, . . .) = 0, (4)
where 𝑢 = 𝑢 (𝑥, 𝑡) is an unknown function, 𝑃 is a polynomialin 𝑢
= 𝑢 (𝑥, 𝑡) and its various partial derivatives, in whichhighest
order derivatives and nonlinear terms are involved.
The summary of the (𝐺/𝐺)-expansion method can bepresented in the
following six steps.
Step 1. To find the traveling wave solutions of (4), weintroduce
the wave variable:
𝑢 (𝑥, 𝑡) = 𝑢 (𝜁) , 𝜁 = (𝑥 − 𝑐𝑡) , (5)
where the constant 𝑐 is generally termed the wave
velocity.Substituting (5) into (4), we obtain the following
ordinary dif-ferential equations (ODE) in 𝜁 (which illustrates a
principaladvantage of a traveling wave solution; i.e., a PDE is
reducedto an ODE):
𝑝 (𝑢, 𝑐𝑢, 𝑢, 𝑐𝑢, 𝑐2𝑢, 𝑢, . . .) = 0. (6)
Step 2. If necessary, we integrate (6) asmany times as
possibleand set the constants of integration to be zero for
simplicity.
Step 3. Suppose that the solution of nonlinear partial
differ-ential equation can be expressed by a polynomial in
(𝐺/𝐺)as
𝑢 (𝜁) =
𝑚
∑
𝑖=0
𝑎𝑖(𝐺
𝐺
)
𝑖
, (7)
where 𝐺 = 𝐺(𝜁) satisfies the second-order linear
ordinarydifferential equation
𝐺
(𝜁) + 𝜆𝐺
(𝜁) + 𝜇𝐺 (𝜁) = 0, (8)
where 𝐺 = 𝑑𝐺/𝑑𝜁, 𝐺 = 𝑑2𝐺/𝑑𝜁2, and 𝑎𝑖, 𝜆, and 𝜇 are real
constants with 𝑎𝑚
̸= 0. Here, the prime denotes the derivativewith respect to 𝜁.
Using the general solutions of (8),
-
Journal of Applied Mathematics 3
we have
(𝐺
𝐺
)
=
{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{
{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{{
{
−𝜆
2
+
√𝜆2− 4𝜇
2
×(
𝑐1sinh {(√𝜆2 − 4𝜇/2) 𝜁}+ 𝑐
2cosh {(√𝜆2 − 4𝜇/2) 𝜁}
𝑐1cosh {(√𝜆2 − 4𝜇/2) 𝜁}+ 𝑐
2sinh {(√𝜆2 − 4𝜇/2) 𝜁}
) ,
𝜆2− 4𝜇 > 0,
−𝜆
2
+
√4𝜇 − 𝜆2
2
×(
−𝑐1sin {(√4𝜇 − 𝜆2/2) 𝜁}+ 𝑐
2cos {(√4𝜇 − 𝜆2/2) 𝜁}
𝑐1cos {(√4𝜇 − 𝜆2/2) 𝜁}+ 𝑐
2sin {(√4𝜇 − 𝜆2/2) 𝜁}
) ,
𝜆2− 4𝜇 < 0,
(𝑐2
𝑐1+ 𝑐2𝜁
) −𝜆
2
, 𝜆2− 4𝜇 = 0.
(9)The above results can be written in simplified forms as
(𝐺
𝐺
)
=
{{{{{{{{{{{{{
{{{{{{{{{{{{{
{
−𝜆
2
+
√𝜆2− 4𝜇
2
tanh{{
{{
{
√𝜆2− 4𝜇
2
𝜁
}}
}}
}
, 𝜆2− 4𝜇 > 0,
−𝜆
2
+
√4𝜇 − 𝜆2
2
tan{{
{{
{
√4𝜇 − 𝜆2
2
𝜁
}}
}}
}
, 𝜆2− 4𝜇 < 0,
(𝑐2
𝑐1+ 𝑐2𝜁
) −𝜆
2
, 𝜆2− 4𝜇 = 0.
(10)
Step 4. The positive integer 𝑚 can be accomplished byconsidering
the homogeneous balance between the highestorder derivatives and
nonlinear terms appearing in (6) asfollows: if we define the degree
of 𝑢(𝜁) as 𝐷[𝑢(𝜁)] = 𝑚, thenthe degree of other expressions is
defined by
𝐷[𝑑𝑞𝑢
𝑑𝜁𝑞] = 𝑚 + 𝑞,
𝐷 [𝑢𝑟(𝑑𝑞𝑢
𝑑𝜁𝑞)
𝑠
] = 𝑚𝑟 + 𝑠 (𝑞 + 𝑚) .
(11)
Therefore, we can get the value of𝑚 in (7).
Step 5. Substituting (7) into (6), useing general solutions
of(8), and collecting all terms with the same order of
(𝐺/𝐺)together, then setting each coefficient of this polynomial
tozero yields a set of algebraic equations for 𝑎
𝑖, 𝑐, 𝜆, and 𝜇.
Step 6. Substitute 𝑎𝑖, 𝑐, 𝜆, and 𝜇 obtained in Step 5 and
the
general solutions of (8) into (7). Next, depending on the signof
the discriminant 𝐴 = 𝜆2 − 4𝜇, we can obtain the explicitsolutions
of (4) immediately.
3. Applications of the(𝐺/𝐺)-Expansion Method
3.1. Schamel Equation. In order to find the solitary wave
solu-tion of (1), we use the transformations
𝑢 (𝑥, 𝑡) = V2 (𝑥, 𝑡) , V (𝑥, 𝑡) = V (𝜁) , 𝜁 = 𝑘𝑥 − 𝑐𝑡.(12)
Then, (1) becomes
−𝑐VV + 𝑘V2V + 𝛿𝑘3 (VV + 3VV) = 0. (13)
Integrating (13) with respect to 𝜁 and setting the
integrationconstant equal to zero, we have
−𝑐
2
V2 +𝑘
3
V3 + 𝑘3𝛿(V)2
+ 𝑘3𝛿VV = 0. (14)
According to the previous steps, using the balancing proce-dure
between V3 with VV in (14), we get 3𝑚 = 2𝑚 + 2 so that𝑚 = 2. Now,
assume that (14) has the following solution:
V (𝜁) = 𝑎0+ 𝑎1(𝐺
𝐺
) + 𝑎2(𝐺
𝐺
)
2
, 𝑎2
̸= 0, (15)
where 𝑎0, 𝑎1, and 𝑎
2are unknown constants to be determined
later. Substituting (15) along with (8) into (14) and
collectingall terms with the same order of (𝐺/𝐺), the left hand
side of(14) is converted into a polynomial in (𝐺/𝐺). Equating
eachcoefficient of the resulting polynomials to zero yields a set
ofalgebraic equations for 𝑎
0, 𝑎1, 𝑎2, 𝛿, 𝜆, 𝑐, 𝑘, and 𝜇 as follows:
(𝐺
𝐺
)
6
:1
3
𝑘𝑎3
2+ 10𝑘
3𝛿𝑎2
2= 0,
(𝐺
𝐺
)
5
: 18𝑘3𝛿𝑎2
2𝜆 + 12𝑘
3𝛿𝑎1𝑎2+ 𝑘𝑎1𝑎2
2= 0,
(𝐺
𝐺
)
4
: 6𝑘3𝛿𝑎0𝑎2+ 16𝑘
3𝛿𝑎2
2𝜇 + 8𝑘
3𝛿𝑎2
2𝜆2−1
2
𝑐𝑎2
2
+ 21𝑘3𝛿𝑎2
1+ 𝑘𝑎0𝑎2
2+ 𝑘𝑎2
1𝑎2= 0,
(𝐺
𝐺
)
3
: 14𝑘3𝛿𝑎2
2𝜆𝜇 + 5𝑘
3𝛿𝑎2
1𝜆 + 18𝑘
3𝛿𝑎1𝑎2𝜇
+ 9𝑘3𝛿𝑎1𝜆2𝑎2+ 2𝑘𝑎
0𝑎1𝑎2− 𝑐𝑎1𝑎2+1
3
𝑘𝑎3
1
+ 2𝑘3𝛿𝑎0𝑎1+ 10𝑘
3𝛿𝑎0𝑎2𝜆 = 0,
-
4 Journal of Applied Mathematics
(𝐺
𝐺
)
2
: 2𝑘3𝛿𝑎2
1𝜆2+ 4𝑘3𝛿𝑎2
1𝜇 + 8𝑘
3𝛿𝑎0𝑎2𝜇 −
1
2
𝑐𝑎2
1− 𝑐𝑎0𝑎2
+ 15𝑘3𝛿𝑎1𝑎2𝜆𝜇 + 𝑘𝑎
0𝑎2
1+ 4𝑘3𝛿𝑎0𝑎2𝜆2
+ 6𝑘3𝛿𝑎2
2𝜇2+ 3𝑘𝛿𝑎
0𝑎1𝜆 + 𝑘𝑎
2
0= 0,
(𝐺
𝐺
)
1
: 2𝑘3𝑎0𝑎1𝜇 + 𝑘3𝛿𝑎0𝑎1𝜆2+ 6𝑘3𝛿𝑎0𝑎2𝜆𝜇 + 𝑘𝑎
2
0
− 𝑐𝑎0𝑎1+ 6𝑘3𝑎1𝑎2𝛿𝜇2+ 3𝑘3𝛿𝜆𝜇𝑎2
1= 0,
(𝐺
𝐺
)
0
: 𝑘3𝛿𝑎2
1𝜇2−1
2
𝑐𝑎2
0+1
3
𝑘𝑎3
0+ 𝑘3𝛿𝜆𝜇𝑎0𝑎1
+ 2𝑘3𝛿𝜇2𝑎0𝑎2= 0.
(16)
On solving the above set of algebraic equations by Maple,
wehave
𝑎0= −30𝜇𝛿𝑘
2, 𝑎
1= −30𝑘
2𝛿𝜆,
𝑎2= −30𝑘
2𝛿, 𝑐 = 𝛿𝑘
3(4𝜆2− 16𝜇) .
(17)
Now, (15) becomes
V (𝜁) = −30𝜇𝛿𝑘2 − 30𝑘2𝛿𝜆(𝐺
𝐺
) − 30𝑘2𝛿(
𝐺
𝐺
)
2
. (18)
Substituting the general solution of (8) into (18), we obtainthe
three types of traveling wave solutions depending on thesign of 𝐴 =
𝜆2 − 4𝜇.
If 𝐴 > 0, we have the following general hyperbolictraveling
wave solutions of (1):
V (𝑥, 𝑡)
= −30𝜇𝛿𝑘2− 30𝑘
2𝛿𝜆
× [−𝜆
2
+
√𝐴
2
× (
𝑐1sinh {(√𝐴/2) 𝜁} + 𝑐
2cosh {(√𝐴/2) 𝜁}
𝑐1cosh {(√𝐴/2) 𝜁} + 𝑐
2sinh {(√𝐴/2) 𝜁}
)]
− 30𝑘2𝛿 [
−𝜆
2
+
√𝐴
2
×(
𝑐1sinh {(√𝐴/2) 𝜁} + 𝑐
2cosh {(√𝐴/2) 𝜁}
𝑐1cosh {(√𝐴/2) 𝜁} + 𝑐
2sinh {(√𝐴/2) 𝜁}
)]
2
,
(19)
where 𝑐1and 𝑐2are arbitrary constants.
If 𝐴 < 0, we have the following general trigonometricfunction
solutions of (1):
V (𝑥, 𝑡)
= −30𝜇𝛿𝑘2− 30𝑘
2𝛿𝜆
× [−𝜆
2
+
√𝐴
2
×(
−𝑐1sin {(√𝐴/2) 𝜁} + 𝑐
2cos {√𝐴/2}
𝑐1cos {(√𝐴/2) 𝜁} + 𝑐
2sin {(√𝐴/2) 𝜁}
)]
− 30𝑘2𝛿 [
−𝜆
2
+
√𝐴
2
× (
−𝑐1sin {(√𝐴/2) 𝜁} + 𝑐
2cos {(√𝐴/2) 𝜁}
𝑐1cos {(√𝐴/2) 𝜁} + 𝑐
2sin {(√𝐴/2) 𝜁}
)]
2
.
(20)
If 𝐴 = 0, we have the following general rational
functionsolutions of (1):
V (𝑥, 𝑡) = − 30𝜇𝛿𝑘2 − 30𝑘2𝛿𝜆 [−𝜆
2
+ (𝑐2
𝑐1+ 𝑐2𝜁
)]
− 30𝑘2𝛿[−
𝜆
2
+ (𝑐2
𝑐1+ 𝑐2𝜁
)]
2
,
(21)
where 𝜁 = 𝑘𝑥 − 𝛿𝑘3(4𝜆2 − 16𝜇)𝑡.Writing 𝑢(𝑥, 𝑡) = V2(𝑥, 𝑡) and
setting 𝑐
2= 𝜇 = 0 and 𝜆 = 2
in (19), we reproduce the result of Khater andHassan [35]
(seetheir Equation (4.7)),
𝑢 (𝑥, 𝑡) = 4 (900𝑘4𝛿2sech4 {𝜁}) , (22)
where 𝜁 = 𝑘𝑥 − 16𝛿𝑘3𝑡.Note that Khater and Hassan [35] obtained
only hyper-
bolic solutions, but in this work, we found two additionaltypes
of solutions, that is, trigonometric and rational solu-tions.
3.2. S-KdV Equation. To find the general exact solutions of(2),
we first write 𝑢(𝑥, 𝑡) = V2(𝑥, 𝑡) to transform (2) into
VV𝑡+ (𝛼V + 𝛽V2) V
𝑥+ 𝛿VV𝑥𝑥𝑥
= 0. (23)
Assume the traveling wave solution of (23) in the formV (𝑥, 𝑡) =
𝑉 (𝜁) , 𝜁 = 𝑘 (𝑥 − 𝑐𝑡) . (24)
Hence, (23) becomes−𝑐𝑉𝑉
+ (𝛼𝑉
2+ 𝛽𝑉3)𝑉+ 𝑘2𝛿 (𝑉𝑉
+ 3𝑉𝑉) = 0.
(25)
Suppose that the solution of (25) can be expressed by
apolynomial in (𝐺/𝐺) as
𝑉 (𝜁) =
𝑚
∑
𝑖=0
𝑎𝑖(𝐺
𝐺
)
𝑖
, 𝑎𝑖̸= 0 (26)
-
Journal of Applied Mathematics 5
and𝐺(𝜁) satisfies (8).The homogeneous balance between thehighest
order derivative 𝑉𝑉 and the nonlinear term 𝑉3𝑉appearing in (25)
yields 𝑚 = 1, and hence, we take thefollowing formal solution:
𝑉 (𝜁) = 𝑎0+ 𝑎1(𝐺
𝐺
) , (27)
where the positive integers 𝑎0and 𝑎
1are to be determined
later. Substituting (27) along with (8) into (25), collectingall
the terms with the same power of (𝐺/𝐺), and equatingeach
coefficient to zero yield a set of simultaneous algebraicequations
for 𝑎
0, 𝑎1, 𝑐, 𝑘, 𝛼, 𝛽, and 𝛿 as follows:
(𝐺
𝐺
)
5
: −𝛽𝑎4
1− 12𝛿𝑘
2𝑎2
1= 0,
(𝐺
𝐺
)
4
: − 3𝛽𝑎3
1𝑎0− 𝛽𝑎4
1𝜆 − 27𝛿𝑘
2𝑎2
1𝜆 − 𝛼𝑎
3
1
− 6𝛿𝑘2𝑎0𝑎1= 0,
(𝐺
𝐺
)
3
: − 3𝛽𝑎3
1𝜆𝑎0− 19𝛿𝑘
2𝑎2
1𝜆2− 12𝛿𝑘
2𝑎0𝑎1𝜆
− 20𝛿𝑘2𝑎2
1𝜇 − 𝛼𝑎
3
1𝜆 − 𝛽𝑎
4
1𝜇 + 𝑐𝑎
2
1− 2𝛼𝑎
2
1𝑎0
− 3𝛽𝑎2
1𝑎2
0= 0,
(𝐺
𝐺
)
2
: 𝑐𝑎0𝑎1− 3𝛽𝑎
2
1𝜆𝑎2
0− 2𝛼𝑎
2
1𝜆𝑎0+ 𝑐𝑎2
1𝜆 − 26𝛿𝑘
2𝑎2
1𝜆𝜇
− 8𝛿𝑘2𝑎0𝑎1𝜇 − 7𝛿𝑘
2𝑎0𝑎1𝜆2− 3𝛽𝑎
3
1𝜇𝑎0− 𝛽𝑎1𝑎3
0
− 𝛼𝑎1𝑎2
0− 𝛼𝑎3
1𝜇 = 0,
(𝐺
𝐺
)
1
: − 𝛼𝜆𝑎1𝑎2
0+ 𝑐𝑎0𝑎1𝜆 − 8𝛿𝑘
2𝑎2
1𝜇2− 7𝛿𝜇𝑘
2𝑎2
1𝜆2
− 3𝛽𝜇𝑎2
1𝑎2
0+ 𝑐𝑎2
1𝜇 − 𝛽𝜆𝑎
1𝑎3
0− 8𝛿𝜆𝜇𝑘
2𝑎0𝑎1
− 2𝛼𝜇𝑎2
1𝑎0= 0,
(𝐺
𝐺
)
0
: 𝑐𝜇𝑎0𝑎1− 𝛼𝜇𝑎
1𝑎2
0− 𝛽𝜇𝑎
1𝑎3
0− 3𝛿𝜆𝑘
2𝑎2
1𝜇2
− 𝛿𝜇𝜆2𝑘2𝑎0𝑎1− 2𝛿𝜇
2𝑘2𝑎0𝑎1= 0.
(28)
The above system admits the following sets of solutions:
𝑎0= 0, 𝑎
1=
4𝛼
5𝛽𝜆
, 𝜇 = 0,
𝑐 = −16𝛼2
75𝛽
, 𝑘 = ±
2√1/ − 75𝛿𝛽𝛼
𝜆
,
(29)
𝑎0= −
4𝛼
5𝛽
, 𝑎1= −
4𝛼
5𝛽𝜆
, 𝜇 = 0,
𝑐 = −16𝛼2
75𝛽
, 𝑘 = ±
2√1/ − 75𝛿𝛽𝛼
𝜆
,
(30)
𝑎0=
5𝛽𝑎1𝜆 − 4𝛼
10𝛽
, 𝜇 =
25𝛽2𝑎2
1𝜆2− 16𝛼
2
100𝛽2𝑎2
1
,
𝑐 = −16𝛼2
75𝛽
, 𝑘 = ±√𝛽
−12𝛿
𝑎1.
(31)
Now, substituting (29)-(30) into (27) gives, respectively,
𝑉1(𝜁) =
4𝛼
5𝛽𝜆
(𝐺
𝐺
) ,
𝑉2(𝜁) = −
4𝛼
5𝛽
−4𝛼
5𝛽𝜆
(𝐺
𝐺
) ,
𝑉3(𝜁) =
5𝛽𝑎1𝜆 − 4𝛼
10𝛽
+ 𝑎1(𝐺
𝐺
) .
(32)
When substituting the general solutions (9) into (32), weobtain
the following three types of traveling wave solutions.
Case 𝐴 > 0: (hyperbolic type)
V1(𝑥, 𝑡) = −
2𝛼
5𝛽
+2𝛼
5𝛽
(𝑐1sinh {(𝜆/2) 𝜁} + 𝑐
2cosh {(𝜆/2) 𝜁}
𝑐1cosh {(𝜆/2) 𝜁} + 𝑐
2sinh {(𝜆/2) 𝜁}
) ,
𝜁 = ±
2√1/ − 75𝛿𝛽𝛼
𝜆
𝑥 +16𝛼2
75𝛽
𝑡,
V2(𝑥, 𝑡) = −
2𝛼
5𝛽
−2𝛼
5𝛽
(𝑐1sinh {(𝜆/2) 𝜁} + 𝑐
2cosh {(𝜆/2) 𝜁}
𝑐1cosh {(𝜆/2) 𝜁} + 𝑐
2sinh {(𝜆/2) 𝜁}
) ,
𝜁 = ±
2√1/ − 75𝛿𝛽𝛼
𝜆
𝑥 +16𝛼2
75𝛽
𝑡,
V3(𝑥, 𝑡)
= −2𝛼
5𝛽
+2𝛼
5𝛽
× (
𝑐1sinh {(2𝛼/5𝛽𝑎
1) 𝜁} + 𝑐
2cosh {(2𝛼/5𝛽𝑎
1) 𝜁}
𝑐1cosh {(2𝛼/5𝛽𝑎
1) 𝜁} + 𝑐
2sinh {(2𝛼/5𝛽𝑎
1) 𝜁}
) ,
𝜁 = ±√𝛽
−12𝛿
𝑎1𝑥 +
16𝛼2
75𝛽
𝑡.
(33)
-
6 Journal of Applied Mathematics
If we set 𝑐2= 0 and write 𝑢(𝑥, 𝑡) = V2(𝑥, 𝑡), then the above
solutions can be written as
𝑢1(𝑥, 𝑡) =
4𝛼2
25𝛽2[−1 ± tanh( 𝛼
5√−3𝛽𝛿
[𝑥 +16𝛼2
75𝛽
𝑡])]
2
,
(34)
𝑢2(𝑥, 𝑡) =
4𝛼2
25𝛽2[1 ± tanh( 𝛼
5√−3𝛽𝛿
[𝑥 +16𝛼2
75𝛽
𝑡])]
2
,
(35)
𝑢3(𝑥, 𝑡) =
4𝛼2
25𝛽2[−1 ± 2 tanh( 𝛼
5√−3𝛽𝛿
[𝑥 +16𝛼2
75𝛽
𝑡])]
2
.
(36)
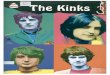
Note that (35) is exactly the same solution of Khater andHassan
[35] as given in their first equation of (3.9) with 𝜁
0= 0.
Similarly we can obtain the second solution of (36) in Hassan[5]
if we set 𝑐
1= 0 in our solution (35). The solution (35)
represents kink shaped solitary and antikink shaped
solitarysolutions (depending upon the choice of sign) which
areshown graphically in Figure 1 for the case 𝑐
1= 1.
Case 𝐴 < 0: (trigonometric type)
𝑉1(𝑥, 𝑡)=−
2𝛼
5𝛽
+2𝛼𝑖
5𝛽
(−𝑐1sin {(𝑖𝜆/2) 𝜁} + 𝑐
2cos {(𝑖𝜆/2) 𝜁}
𝑐1cos {(𝑖𝜆/2) 𝜁} + 𝑐
2sin {(𝑖𝜆/2) 𝜁}
) ,
𝜁 = ±
2√1/ − 75𝛿𝛽𝛼
𝜆
𝑥 +16𝛼2
75𝛽
𝑡,
𝑉2(𝑥, 𝑡) = −
2𝛼
5𝛽
−2𝑖𝛼
5𝛽
× (−𝑐1sin {(𝑖𝜆/2) 𝜁} + 𝑐
2cos {(𝑖𝜆/2) 𝜁}
𝑐1cos {(𝑖𝜆/2) 𝜁} + 𝑐
2sin {(𝑖𝜆/2) 𝜁}
) ,
𝜁 = ±
2√1/ − 75𝛿𝛽𝛼
𝜆
𝑥 +16𝛼2
75𝛽
𝑡,
𝑉3(𝑥, 𝑡)
= −2𝛼
5𝛽
+2𝑖𝛼
5𝛽
× (
−𝑐1sin {(2𝑖𝛼/5𝛽𝑎
1) 𝜁} + 𝑐
2cos {(2𝑖𝛼/5𝛽𝑎
1) 𝜁}
𝑐1cos {(2𝑖𝛼/5𝛽𝑎
1) 𝜁} + 𝑐
2sin {(2𝑖𝛼/5𝛽𝑎
1) 𝜁}
) ,
𝜁 = ±√𝛽
−12𝛿
𝑎1𝑥 +
16𝛼2
75𝛽
𝑡.
(37)
But if 𝑐2= 0 and 𝑢(𝑥, 𝑡) = V2(𝑥, 𝑡), then trigonometric
type solution becomes
𝑢1(𝑥, 𝑡) =
4𝛼2
25𝛽2[−1 ± 𝑖 tan( 𝛼
5√3𝛽𝛿
[𝑥 +16𝛼2
75𝛽
𝑡])]
2
,
𝑢2(𝑥, 𝑡) =
4𝛼2
25𝛽2[1 ± 𝑖 tan( 𝛼
5√3𝛽𝛿
[𝑥 +16𝛼2
75𝛽
𝑡])]
2
,
𝑢3(𝑥, 𝑡) =
4𝛼2
25𝛽2[−1 ± 2𝑖 tan( 𝛼
5√3𝛽𝛿
[𝑥 +16𝛼2
75𝛽
𝑡])]
2
.
(38)
Case 𝐴 = 0: (rational type)
𝑢1(𝑥, 𝑡) =
4𝛼2
25𝛽2[−1 + 2(
𝑐2
𝑐1+ 𝑐2𝜁
)]
2
,
𝑢2(𝑥, 𝑡) =
4𝛼2
25𝛽2[1 + 2(
𝑐2
𝑐1+ 𝑐2𝜁
)]
2
,
𝑢3(𝑥, 𝑡) = [
2𝛼
5𝛽
+ 𝑎1(
𝑐2
𝑐1+ 𝑐2𝜁
)]
2
.
(39)
As mentioned before, the (𝐺/𝐺)-expansion methodgives more
general types of solutions than that found byKhater and Hassan [35]
and Hassan [5].
3.3.TheModified Two-Dimensional KP (Kadomtsev-Petviash-vili)
Equation. The modified KP equation (3) containing asquare root
nonlinearity is a very attractive model for thestudy of
ion-acoustic waves in plasma physic [8]. We willobtain more general
exact solutions of the modified KPequation. In order to find the
traveling wave solution of (3),we let
V (𝑥, 𝑦, 𝑡) = V (𝜁) , 𝜁 = (𝑥 + 𝑘𝑦 − 𝑐𝑡) . (40)
Now, taking 𝑢(𝑥, 𝑦, 𝑡) = V2(𝑥, 𝑦, 𝑡), (3) becomes
(−𝑐 + 𝛿𝑘2) VV + (−𝑐 + 𝛿𝑘2) V2 + 𝛼V2V + 2𝛼VV2
+ 𝛽VV + 4𝛽VV + 3𝛽(V)2
= 0,
(41)
where 𝑘, 𝑐, 𝛽, 𝛿, and 𝛼 are constants and the prime
denotesdifferentiation with respect to 𝜁. Integrating (41) with
respectto 𝜁 and setting the integration constant equal to zero,
weobtain
(−𝑐 + 𝛿𝑘2) VV + 𝛼V2V + 3𝛽VV + 𝛽VV = 0. (42)
Balancing V2V with VV gives𝑚 = 2. Therefore, we can writethe
solution of (42) in the form
V (𝜁) = 𝑎0+ 𝑎1(𝐺
𝐺
) + 𝑎2(𝐺
𝐺
)
2
, (43)
where 𝑎0, 𝑎1, and 𝑎
2are constants to be determined later.
Substituting (43) along with (8) into (42) and collecting
allterms with the same order of (𝐺/𝐺), the left hand sides of(42)
are converted into a polynomial in (𝐺/𝐺). Setting eachcoefficient
of each polynomial to zero, we derive a set of
-
Journal of Applied Mathematics 7
0.6
0.5
0.4
0.3
0.2
0.1
0−40 −20 0 20 40
x
u(x)
(a)
0246810
t
0.6
0.5
0.4
0.3
0.2
0.1
0
−40−2002040x
u(x,t)
(b)
Figure 1: (a) 2D profile of (35): kink shaped solitary (𝑢+, blue
line), anti-kink shaped solitary (𝑢−, black line). (b)
Corresponding 3D plotswhen + sign is taken and when −ve sign is
taken, with 𝛼 = 1, 𝛽 = −1, and 𝛿 = 1.
algebraic equations for 𝑎0, 𝑎1, 𝑎2, 𝛿, 𝜆, 𝛼, 𝛽, 𝑐, 𝑘, and 𝜇
as
follows:
(𝐺
𝐺
)
7
: −60𝛽𝑎2
2− 2𝛼𝑎
3
2= 0,
(𝐺
𝐺
)
6
: −2𝛼𝑎3
2𝜆 − 5𝛼𝑎
1𝑎2
2− 60𝛽𝑎
1𝑎2− 150𝑎
2
2𝜆 = 0,
(𝐺
𝐺
)
5
: − 12𝛽𝑎2
1− 5𝛼𝑎
1𝑎2
2𝜆 − 124𝛽𝑎
2
2𝜆2− 2𝑘2𝛿𝑎2
2
− 24𝛽𝑎0𝑎2− 4𝛼𝑎
0𝑎2− 144𝛽𝑎
1𝑎2𝜆 + 2𝑐𝑎
2
2
− 4𝛼𝑎2
1𝑎2− 2𝛼𝑎
3
2𝜇 = 0,
(𝐺
𝐺
)
4
: − 196𝛽𝑎2
2𝜆𝜇 − 6𝛼𝑎
0𝑎1𝑎2− 111𝛽𝑎
1𝑎2𝜆2
− 4𝛼𝑎0𝑎2
2𝜆 − 32𝛽𝑎
2
2𝜆3− 𝛼𝑎3
1− 2𝑘2𝛿𝑎2
2𝜆 + 2𝑐𝑎
2
2𝜆
− 54𝛽𝑎0𝑎2𝜆 − 5𝛼𝑎
1𝑎2
2𝜇 − 4𝛼𝑎
2
1𝑎2𝜆 + 3𝑐𝑎
1𝑎2
− 6𝛽𝑎0𝑎1− 3𝑘2𝛿𝑎1𝑎2= 0,
(𝐺
𝐺
)
3
: 2𝑐𝑎0𝑎2− 76𝛽𝑎
2
2𝜇2− 4𝛼𝑎
0𝑎2
2𝜇 − 𝑘2𝛿𝑎2
1
− 27𝛽𝑎1𝜆3𝑎2− 74𝛽𝑎
2
2𝜆2𝜇 + 𝑐𝑎
2
1− 6𝛼𝑎
0𝑎1𝑎2𝜆
+ 3𝑐𝑎1𝑎2𝜆 − 40𝛽𝑎
0𝑎2𝜇 − 38𝛽𝑎
0𝑎2𝜆2
− 19𝛽𝑎2
1𝜆2− 2𝛼𝑎
0𝑎2
1− 4𝛼𝑎
2
1𝑎2𝜇
− 168𝛽𝑎1𝑎2𝜆𝜇 − 3𝑘
2𝛿𝑎1𝑎2𝜆
+ 2𝑐𝑎2
2𝜇 − 2𝛼𝑎
2
0𝑎2− 20𝛽𝑎
2
1𝜇 − 𝛼𝑎
3
1𝜆
− 12𝛽𝑎0𝑎1𝜆 − 2𝑘
2𝛿𝑎0𝑎2= 0,
(𝐺
𝐺
)
2
: 2𝑐𝑎0𝑎2𝜆 − 4𝛽𝑎
2
1𝜆3− 8𝛽𝑎
0𝑎1𝜇
− 3𝑘2𝛿𝑎1𝑎2𝜇 − 𝛼𝑎
3
1𝜇 − 52𝛽𝑎
0𝑎2𝜆𝜇 + 𝑐𝑎
0𝑎1
+ 3𝑐𝑎1𝑎2𝜇 − 6𝛼𝑎
0𝑎1𝑎2𝜇 − 𝑘2𝛿𝑎2
1𝜆
− 60𝛽𝑎1𝑎2𝜇2− 𝛼𝑎2
0𝑎1− 2𝛼𝑎
0𝑎2
1𝜆
− 2𝑘3𝛿𝑎0𝑎2𝜆 − 2𝛼𝑎
2
0𝑎2𝜆 − 7𝛽𝑎
0𝑎1𝜆2
− 26𝛽𝑎2
1𝜆𝜇 + 𝑐𝑎
2
1𝜆 − 57𝛽𝑎
1𝜆2𝑎2𝜇
− 8𝛽𝑎0𝑎2𝜆3− 𝑘2𝛿𝑎0𝑎1− 54𝛽𝑎
2
2𝜆𝜇2= 0,
(𝐺
𝐺
)
1
: − 2𝛼𝑎2
0𝜇 + 2𝑐𝑎
0𝑎2𝜇 − 𝛼𝑎
2
0𝑎1𝜆 − 2𝑘
2𝛿𝑎0𝑎2𝜇
− 8𝛽𝑎2
1𝜇2+ 𝑐𝑎0𝑎1𝜆 − 16𝛽𝑎
0𝑎2𝜇2
− 8𝛽𝑎0𝑎1𝜆𝜇 − 𝛽𝑎
0𝑎1𝜆3− 14𝛽𝑎
0𝑎2𝜆2𝜇
− 36𝛽𝜆𝜇2𝑎1𝑎2− 12𝛽𝑎
2
2𝜇3− 𝑘2𝛿𝑎0𝑎1𝜆
− 𝑘2𝛿𝑎2
1𝜇 + 𝑐𝑎
2
1𝜇 − 2𝛼𝑎
0𝑎2
1𝜇 − 7𝛽𝜇𝜆
2𝑎2
1= 0,
-
8 Journal of Applied Mathematics
(𝐺
𝐺
)
0
: − 6𝛽𝜇3𝑎1𝑎2+ 𝑐𝑎0𝑎1𝜇 − 𝛼𝜇𝑎
2
0𝑎1− 3𝛽𝜆𝜇
2𝑎2
1
− 𝛽𝜇𝜆2𝑎0𝑎1− 6𝛽𝜆𝜇
2𝑎0𝑎2− 2𝛽𝑎
0𝑎1𝜇2
− 𝑘2𝛿𝜇𝑎0𝑎1= 0.
(44)
Solving this system by Maple gives two sets of solutions.
Case 1. We have
𝑎0=
−30𝛽𝜇
𝛼
, 𝑎1=
−30𝛽𝜆
𝛼
, 𝑎2=
−30𝛽
𝛼
,
𝑐 = −16𝛽𝜇 + 4𝛽𝜆2+ 𝑘2𝛿.
(45)
Substituting the above case and the general solution (8)
into(43) and according to (42), we obtain three types of
travelingwave solutions of (3) as follows.
If 𝐴 > 0, we have the hyperbolic type
V (𝑥, 𝑦, 𝑡)
=
−30𝛽𝜇
𝛼
−
30𝛽𝜆
𝛼
× [−𝜆
2
+
√𝐴
2
× (
𝑐1sinh {(√𝐴/2) 𝜁} + 𝑐
2cosh {(√𝐴/2) 𝜁}
𝑐1cosh {(√𝐴/2) 𝜁} + 𝑐
2sinh {(√𝐴/2) 𝜁}
)]
−
30𝛽
𝛼
[−𝜆
2
+
√𝐴
2
× (
𝑐1sinh {(√𝐴/2) 𝜁} + 𝑐
2cosh {(√𝐴/2) 𝜁}
𝑐1cosh {(√𝐴/2) 𝜁} + 𝑐
2sinh {(√𝐴/2) 𝜁}
)]
2
.
(46)
In particular, if 𝑐1
̸= 0, 𝑐2= 0, 𝜆 > 0, and 𝜇 = 0, then 𝑢(𝑥, 𝑦, 𝑡)
becomes
𝑢 (𝑥, 𝑦, 𝑡) =
225𝛽2𝜆4
4𝛼2
sech4 {𝜆2
𝜁} ,
𝜁 = 𝑥 + 𝑘𝑦 − (4𝛽𝜆2+ 𝑘2𝛿) 𝑡.
(47)
If 𝐴 < 0, we have the trigonometric type
V (𝑥, 𝑦, 𝑡)
=
−30𝛽𝜇
𝛼
−
30𝛽𝜆
𝛼
× [−𝜆
2
+
√𝐴
2
× (
−𝑐1sin {(√𝐴/2) 𝜁} + 𝑐
2cos {(√𝐴/2) 𝜁}
𝑐1cos {(√𝐴/2) 𝜁} + 𝑐
2sin {(√𝐴/2) 𝜁}
)]
−
30𝛽
𝛼
[−𝜆
2
+
√𝐴
2
×(
−𝑐1sin {(√𝐴/2) 𝜁} + 𝑐
2cos {(√𝐴/2) 𝜁}
𝑐1cos {(√𝐴/2) 𝜁} + 𝑐
2sin {(√𝐴/2) 𝜁}
)]
2
.
(48)
So, the traveling wave solutions of (3) in this case are
𝑢 (𝑥, 𝑦, 𝑡) =
225𝛽2𝜆4
4𝛼2
sec4 {√−𝜆2
2
𝜁} ,
𝜁 = 𝑥 + 𝑘𝑦 − (4𝛽𝜆2+ 𝑘2𝛿) 𝑡.
(49)
Case 2. We have
𝑎0=
−5𝛽 (𝜆2+ 2𝜇)
𝛼
, 𝑎1=
−30𝛽𝜆
𝛼
, 𝑎2=
−30𝛽
𝛼
,
𝑐 = 16𝛽𝜇 − 4𝛽𝜆2+ 𝑘2𝛿.
(50)
If 𝐴 > 0, we have the hyperbolic type
V (𝑥, 𝑦, 𝑡)
= −
5𝛽 (𝜆2+ 2𝜇)
𝛼
−
30𝛽𝜆
𝛼
× [−𝜆
2
+
√𝐴
2
× (
𝑐1sinh {(√𝐴/2) 𝜁} + 𝑐
2cosh {(√𝐴/2) 𝜁}
𝑐1cosh {(√𝐴/2) 𝜁} + 𝑐
2sinh {(√𝐴/2) 𝜁}
)]
−
30𝛽
𝛼
[−𝜆
2
+
√𝐴
2
×(
𝑐1sinh {(√𝐴/2) 𝜁} + 𝑐
2cosh {(√𝐴/2) 𝜁}
𝑐1cosh {(√𝐴/2) 𝜁} + 𝑐
2sinh {(√𝐴/2) 𝜁}
)]
2
.
(51)
However, if 𝑐1
̸= 0, 𝑐2= 0, 𝜆 > 0, and 𝜇 = 0, then 𝑢(𝑥, 𝑦, 𝑡)
becomes
𝑢 (𝑥, 𝑦, 𝑡) =
25𝛽2𝜆4
4𝛼2
[2 − 3sech2 {𝜆2
𝜁}]
2
,
𝜁 = 𝑥 + 𝑘𝑦 − (−4𝛽𝜆2+ 𝑘2𝛿) 𝑡.
(52)
If 𝐴 < 0, we have the trigonometric type
V (𝑥, 𝑦, 𝑡)
= −
5𝛽 (𝜆2+ 2𝜇)
𝛼
−
30𝛽𝜆
𝛼
-
Journal of Applied Mathematics 9
0 5 100
1
1.5
0.5
2
−10 −5
x
u(x)
(a)
u(𝜁)
0510
−10−5x
05
−10−5
y
0
1
1.5
0.5
2
(b)
Figure 2: Bell type solitary (a) 2D profile and (b)
corresponding 3D plot of (47) for parameters 𝛼 = 2, 𝛽 = 0.4 and 𝛿 =
0.1, 𝜆 = 1, 𝑘 = 1, and𝑡 = 0.5.
× [−𝜆
2
+
√𝐴
2
× (
−𝑐1sin {(√𝐴/2) 𝜁} + 𝑐
2cos {(√𝐴/2) 𝜁}
𝑐1cos {(√𝐴/2) 𝜁} + 𝑐
2sin {(√𝐴/2) 𝜁}
)]
−
30𝛽
𝛼
[−𝜆
2
+
√𝐴
2
×(
−𝑐1sin {(√𝐴/2) 𝜁} + 𝑐
2cos {(√𝐴/2) 𝜁}
𝑐1cos {(√𝐴/2) 𝜁} + 𝑐
2sin {(√𝐴/2) 𝜁}
)]
2
.
(53)
In the particular case when 𝑐1
̸= 0, 𝑐2= 0, 𝜆 > 0, and 𝜇 = 0,
𝑢(𝑥, 𝑦, 𝑡) becomes
𝑢 (𝑥, 𝑦, 𝑡) =
25𝛽2𝜆4
4𝛼2
[2 − 3sec2 {√−𝜆2
2
𝜁}]
2
,
𝜁 = 𝑥 + 𝑘𝑦 − (−4𝛽𝜆2+ 𝑘2𝛿) 𝑡.
(54)
If 𝐴 = 0, we have the rational type
V (𝑥, 𝑦, 𝑡) = −5𝛽 (𝜆2+ 2𝜇)
𝛼
− 30𝑘2𝛿𝜆 [−
𝜆
2
+ (𝑐2
𝑐1+ 𝑐2𝜁
)]
− 30𝑘2𝛿[−
𝜆
2
+ (𝑐2
𝑐1+ 𝑐2𝜁
)]
2
,
(55)
where 𝜁 = 𝑥 + 𝑘𝑦 − (16𝛽𝜇 − 4𝛽𝜆2 + 𝑘2𝛿)𝑡.
We remark that our results in (47) and (52), when 𝑐1
̸= 0,𝑐2= 0, 𝜆 > 0, and 𝜇 = 0, match those of Khater et al.
[6] (2.19)
when 𝑎 = 1. In Figure 2, we plot the bell type solitary for
2Dprofile and the corresponding 3D plot of (47) for parameters𝛼 =
2, 𝛽 = 0.4 and 𝛿 = 0.1, 𝜆 = 1, 𝑘 = 1, and 𝑡 = 0.5.
4. Conclusion
The (𝐺/𝐺)-expansion was applied to solve the model of
ion-acoustic waves in plasma physics where these equations
eachcontain a square root nonlinearity. The (𝐺/𝐺)-expansionhas been
successfully used to obtain some exact travelingwave solutions of
the Schamel equation, Schamel-KdV (S-KdV) equation, and modified KP
(Kadomtsev-Petviashvili)equation. Moreover, the reliability of the
method and thereduction in the size of computational domain give
thismethod a wider applicability. This fact shows that ouralgorithm
is effective and more powerful for NLPDE. Inall the general
solutions (22), (35), (47), and (52), we havethe additional
arbitrary constants 𝑐
1, 𝑐2, 𝜆, and 𝜇. We note
that the special case 𝑐1
̸= 0, 𝑐2
= 0, 𝜆 > 0, and 𝜇 = 0reproduced the results of Khater and
Hassan [35], Hassan [5]and Khater et al. [6]. Many different new
forms of travelingwave solutions such as the kink shaped, antikink
shaped, andbell type solitary solutions were obtained. Finally,
numericalsimulations are given to complete the study.
Moreover, all the methods have some limitations in
theirapplications. In fact, there is no unified method that canbe
used to handle all types of nonlinear partial differentialequations
(NLPDE). Certainly, each investigator in the fieldof differential
equations has his own experience to choosethe method depending on
form of the nonlinear differentialequation and the pole of its
solution. So, the limitations of
-
10 Journal of Applied Mathematics
the (𝐺/𝐺)-expansion method used a rise only when theequation has
the traveling wave and becomes powerful infinding traveling wave
solutions of NLPDE only.
In our future works, we can extend our method byintroducing a
more generalized ansätz 𝐺2 = 𝑑
2𝐺2+ 𝑑3𝐺3+
𝑑4𝐺4, where 𝐺 = 𝐺(𝜁), to solve Schamel equation, Schamel-
KdV (S-KdV) equation, and modified Kadomtsev-Petviash-vili (KP)
equation.
Acknowledgment
This work is financially supported by Universiti
KebangsaanMalaysia Grant: UKM-DIP-2012-31.
References
[1] G. B. Whitham, Linear and Nonlinear Waves, Pure and
AppliedMathematics, John Wiley & Sons, New York, NY, USA,
1974.
[2] R. C.Davidson,Methods inNonlinear PlasmaTheory,
AcademicPress, New York, NY, USA, 1972.
[3] H. Schamel, “A modified Korteweg de Vries equation for
ionacoustic waves due to resonant electrons,” Journal of
PlasmaPhysics, vol. 9, pp. 377–387, 1973.
[4] J. Lee and R. Sakthivel, “Exact travelling wave solutions of
theSchamel–Korteweg–de Vries equation,” Reports on Mathemati-cal
Physics, vol. 68, no. 2, pp. 153–161, 2011.
[5] M. M. Hassan, “New exact solutions of two nonlinear
physicalmodels,” Communications in Theoretical Physics, vol. 53,
no. 4,pp. 596–604, 2010.
[6] A. H. Khater, M. M. Hassan, and D. K. Callebaut,
“Travellingwave solutions to some important equations of
mathematicalphysics,” Reports on Mathematical Physics, vol. 66, no.
1, pp. 1–19, 2010.
[7] D. Chakraborty and K. P. Das, “Stability of ion-acoustic
solitonsin a multispecies plasma consisting of non-isothermal
elec-trons,” Journal of Plasma Physics, vol. 60, no. 1, pp.
151–158, 1998.
[8] B. B. Kadomtsev and V. I. Petviashvili, “On the stability
ofsolitary in weakly dispersivemedia,” Soviet Physics Doklady,
vol.15, pp. 539–541, 1970.
[9] M. Krisnangkura, S. Chinviriyasit, and W. Chinviriyasit,
“Ana-lytic study of the generalized Burger’s-Huxley equation
byhyperbolic tangent method,” Applied Mathematics and Compu-tation,
vol. 218, no. 22, pp. 10843–10847, 2012.
[10] A.-M. Wazwaz, “The tanh method for traveling wave
solutionsof nonlinear equations,”AppliedMathematics
andComputation,vol. 154, no. 3, pp. 713–723, 2004.
[11] Q. Shi, Q. Xiao, and X. Liu, “Extended wave solutions for a
non-linear Klein-Gordon-Zakharov system,” Applied Mathematicsand
Computation, vol. 218, no. 19, pp. 9922–9929, 2012.
[12] A.-M. Wazwaz, “The tanh and the sine-cosine methods for
areliable treatment of the modified equal width equation and
itsvariants,” Communications in Nonlinear Science and
NumericalSimulation, vol. 11, no. 2, pp. 148–160, 2006.
[13] A. Jabbari and H. Kheiri, “New exact traveling wave
solutionsfor the Kawahara and modified Kawahara equations by
usingmodified tanh-coth method,” Acta Universitatis Apulensis,
no.23, pp. 21–38, 2010.
[14] K. Parand and J. A. Rad, “Exp-function method for
somenonlinear PDE’s and a nonlinear ODE’s,” Journal of King
SaudUniversity-Science, vol. 24, no. 1, pp. 1–10, 2012.
[15] M. K. Elboree, “New soliton solutions for a
Kadomtsev-Petviashvili (KP) like equation coupled to a Schrödinger
equa-tion,”AppliedMathematics andComputation, vol. 218, no. 10,
pp.5966–5973, 2012.
[16] A. S. Abdel Rady, E. S. Osman, and M. Khalfallah, “On
solitonsolutions of the (2 + 1) dimensional Boussinesq
equation,”AppliedMathematics and Computation, vol. 219, no. 8, pp.
3414–3419, 2012.
[17] B. Hong and D. Lu, “New Jacobi elliptic function-like
solutionsfor the general KdV equation with variable
coefficients,”Mathe-matical and ComputerModelling, vol. 55, no.
3-4, pp. 1594–1600,2012.
[18] J. Lee, R. Sakthivel, and L. Wazzan, “Exact traveling wave
solu-tions of a higher-dimensional nonlinear evolution
equation,”Modern Physics Letters B, vol. 24, no. 10, pp. 1011–1021,
2010.
[19] S. Abbasbandy and A. Shirzadi, “The first integral method
formodified Benjamin-Bona-Mahony equation,” Communicationsin
Nonlinear Science and Numerical Simulation, vol. 15, no. 7,
pp.1759–1764, 2010.
[20] N. Taghizadeh, M. Mirzazadeh, and F. Tascan, “The
first-integral method applied to the Eckhaus equation,”
AppliedMathematics Letters, vol. 25, no. 5, pp. 798–802, 2012.
[21] W. Malfliet, “Solitary wave solutions of nonlinear wave
equa-tions,” American Journal of Physics, vol. 60, no. 7, pp.
650–654,1992.
[22] M. Wang, X. Li, and J. Zhang, “The (𝐺/𝐺)-expansion
methodand travelling wave solutions of nonlinear evolution
equationsin mathematical physics,” Physics Letters A, vol. 372, no.
4, pp.417–423, 2008.
[23] W. M. Taha and M. S. M. Noorani, “Exact solutions of
equa-tion generated by the Jaulent-Miodek hierarchy by
(𝐺/𝐺)-expansion method,”Mathematical Problems in Engineering,
vol.2013, Article ID 392830, 7 pages, 2013.
[24] W.M. Taha,M. S. M. Noorani, and I. Hashim, “New
applicationof the (𝐺/𝐺)-expansion method for thin film
equations,”Abstract and Applied Analysis, vol. 2013, Article ID
535138, 6pages, 2013.
[25] B. Ayhan and A. Bekir, “The (𝐺/𝐺)-expansion method forthe
nonlinear lattice equations,” Communications in NonlinearScience
and Numerical Simulation, vol. 17, no. 9, pp. 3490–3498,2012.
[26] J. Feng, W. Li, and Q. Wan, “Using (𝐺/𝐺)-expansion methodto
seek the traveling wave solution of Kolmogorov-Petrovskii-Piskunov
equation,” Applied Mathematics and Computation,vol. 217, no. 12,
pp. 5860–5865, 2011.
[27] M. M. Kabir, A. Borhanifar, and R. Abazari, “Application
of(𝐺/𝐺)-expansion method to regularized long wave (RLW)equation,”
Computers & Mathematics with Applications, vol. 61,no. 8, pp.
2044–2047, 2011.
[28] A. Malik, F. Chand, H. Kumar, and S. C. Mishra,
“Exactsolutions of the Bogoyavlenskii equation using the
multiple(𝐺/𝐺)-expansion method,” Computers & Mathematics
withApplications, vol. 64, no. 9, pp. 2850–2859, 2012.
[29] A. Malik, F. Chand, and S. C. Mishra, “Exact travelling
wavesolutions of some nonlinear equations by
(𝐺/𝐺)-expansionmethod,” Applied Mathematics and Computation, vol.
216, no.9, pp. 2596–2612, 2010.
[30] A. Jabbari, H. Kheiri, and A. Bekir, “Exact solutions of
the cou-pled Higgs equation and the Maccari system using He’s
semi-inverse method and (𝐺/𝐺)-expansion method,” Computers
&Mathematics with Applications, vol. 62, no. 5, pp.
2177–2186,2011.
-
Journal of Applied Mathematics 11
[31] H. Naher and F. A. Abdullah, “Some new traveling wave
solu-tions of the nonlinear reaction diffusion equation by using
theimproved (𝐺/𝐺)-expansion method,” Mathematical Problemsin
Engineering, vol. 2012, Article ID 871724, 17 pages, 2012.
[32] E. M. E. Zayed and M. A. M. Abdelaziz, “The
two-variable(𝐺/𝐺, 1/𝐺)-expansion method for solving the nonlinear
KdV-
mKdV equation,” Mathematical Problems in Engineering, vol.2012,
Article ID 725061, 14 pages, 2012.
[33] H. Naher and F. A. Abdullah, “The improved
(𝐺/𝐺)-expansionmethod for the (2 + 1)-dimensional modified
Zakharov-Kuznetsov equation,” Journal of Applied Mathematics, vol.
2012,Article ID 438928, 20 pages, 2012.
[34] H. Naher and F. A. Abdullah, “New traveling wave solutions
bythe extended generalized Riccati equation mapping method ofthe (2
+ 1)-dimensional evolution equation,” Journal of
AppliedMathematics, vol. 2012, Article ID 486458, 18 pages,
2012.
[35] A. H. Khater and M. M. Hassan, “Exact solutions
expressiblein hyperbolic and jacobi elliptic functions of some
importantequations of ion-acoustic waves,” in Acoustic
Waves—FromMicrodevices to Helioseismology, 2011.
-
Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Probability and StatisticsHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
CombinatoricsHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical
Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
The Scientific World JournalHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014
Stochastic AnalysisInternational Journal of






![Face Parsing With RoI Tanh-Warping - CVF Open Accessopenaccess.thecvf.com/.../papers/Lin_Face_Parsing_With_RoI_Tanh-… · Face Parsing with RoI Tanh-Warping ... (LFW-PL) [11] datasets](https://img.pdfslide.net/doc/110x75/5f0a8a417e708231d42c22b7/face-parsing-with-roi-tanh-warping-cvf-open-face-parsing-with-roi-tanh-warping.jpg)