Embed Size (px)
Citation preview

Research ArticleSinc Collocation Method for Finding Numerical Solution ofIntegrodifferential Model Arisen in Continuous Mixed Strategy
F Hosseini Shekarabi
Department of Mathematics Shahid Rajaee Teacher Training University Lavizan Tehran Iran
Correspondence should be addressed to F Hosseini Shekarabi f hosseinisrttuedu
Received 22 February 2014 Revised 9 August 2014 Accepted 21 August 2014 Published 17 September 2014
Academic Editor Fu-Yun Zhao
Copyright copy 2014 F Hosseini Shekarabi This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
One of the new techniques is used to solve numerical problems involving integral equations and ordinary differential equationsknown as Sinc collocation methods This method has been shown to be an efficient numerical tool for finding solution Theconstruction mixed strategies evolutionary game can be transformed to an integrodifferential problem Properties of the sincprocedure are utilized to reduce the computation of this integrodifferential to some algebraic equations The method is appliedto a few test examples to illustrate the accuracy and implementation of the method
1 Introduction
Evolutionary game dynamics is a fast developing field withapplications in biology economics sociology politics inter-personal relationships and anthropology Background mate-rial and countless references can be found in [1ndash8] In thepresent paper we consider a continuous mixed strategiesmodel for population dynamics based on an integrodifferen-tial representation Analogousmodels for population dynam-ics based on the replicator equation with continuous strategyspace were investigated in [9ndash13] For the moment basedmodel has proved global existence of solutions and studiedthe asymptotic behavior and stability of solutions in the caseof two strategies [14]
In the last three decades a variety of numerical methodsbased on the sinc approximation have been developed Sincmethods were developed by Stenger [15] and Lund andBowers [16] and it is widely used for solving a wide rangeof linear and nonlinear problems arising from scientific andengineering applications including oceanographic problemswith boundary layers [17] two-point boundary value prob-lems [18] astrophysics equations [19] Blasius equation [20]Volterras population model [21] Hallens integral equation[22] third-order boundary value problems [23] system ofsecond-order boundary value problems [24] fourth-order
boundary value problems [25] heat distribution [26] elasto-plastic problem [27] inverse problem [28 29] integrodiffer-ential equation [30] optimal control [15] nonlinear bound-ary-value problems [31] and multipoint boundary valueproblems [32] Very recently authors of [33] used the sinc pro-cedure to solve linear and nonlinear Volterra integral andintegrodifferential equations
The content of this paper is arranged in seven sections InSection 2 I discuss the modeling of the problem in an inte-grodifferential form Section 3 introduces some general con-cepts concerning the sinc approximation Section 4 containssome preliminaries in collocation method In Section 5 themethod is applied for solving the problem In Section 6 somenumerical examples has been provided Finally Section 7provides the conclusion of this work
2 Mathematical Model
The model we consider here is an integrodifferential modelfor continuous mixed strategies In game theory a dominantstrategy is the one that gives a player the most benefit nomatter what the other players do A playerrsquos strategy in a gameis a complete plan of action forwhatever situationmight arisethis fully determines the playerrsquos behavior A playerrsquos strategy
Hindawi Publishing CorporationJournal of Computational EngineeringVolume 2014 Article ID 320420 8 pageshttpdxdoiorg1011552014320420
2 Journal of Computational Engineering
set defines what strategies are available for them to play Apure strategy provides a complete definition of how a playerwill play a game In particular it determines themove a playerwill make for any situation he or she could face A playerrsquosstrategy set is the set of pure strategies available to that playerA mixed strategy is an assignment of a probability to eachpure strategy This allows for a player to randomly select apure strategy Since probabilities are continuous there areinfinitely many mixed strategies available to a player even iftheir strategy set is finite
A payoff is a number also called utility that reflects thedesirability of an outcome to a player for whatever reasonWhen the outcome is random payoffs are usually weightedwith their probabilitiesThe expected payoff incorporates theplayerrsquos attitude towards risk
Assume that we have a game where there are 119873 purestrategies 119877
1to 119877
119873and that the players can use mixed
strategies this consists of playing the pure strategies 1198771to 119877
119873
with some probabilities 1199021to 119902
119873with 119902
119894ge 0 and sum119902
119894= 1 A
strategy corresponds to a point q in the simplex
119878119873minus1= q = (119902
1 119902
2 119902
119873) isin 119877
119873 119902
119894ge 0
119873
sum
119894=1
119902119894= 1 (1)
The corners of the simplex are the standard unit vectorse119894 where the 119894th component is 1 and all others are 0 and
correspond to the119873 pure strategies 119877119894 119894 = 1 119873
Let us denote by 119886119894119895the payoff for a player using the pure
strategy 119877119894against a player using the pure strategy 119877
119895 Here
Matrix 119860 = (119886119894119895) is called payoff matrix An 119877
119894-strategist
obtain the expected payoff (119860qlowast)119894= sum
119895119886119894119895119902lowast
119895against a qlowast-
strategist The payoff for a q-startegist against a qlowast strategistis given by
119860 (q qlowast) = q sdot 119860qlowast =119873
sum
119894119895=1
119886119894119895119902119894119902lowast
119895 (2)
We consider a population of individuals as a player ofthe game and denote by 119891(119905 q) the density of populationadopting the q strategy at time 119905 the evolution in time of 119891due to dynamics of the game is driven by
120597119905119891 (119905 q) = 119891 (119905 q) (int
119878119873
119860 (q qlowast) 119891 (119905 qlowast) 119889qlowast minus 120601 (119891))
(3)
where the term
int119878119873
119860 (q qlowast) 119891 (119905 qlowast) 119889qlowast (4)
represents the payoff of the strategy q against all the othersstrategies 119860(q qlowast) being the interacting kernel between theq-strategist and the qlowast-strategist The last term of (3) isdefined by
120601 (119891) = ∬119878119873
119891 (119905 q) 119860 (q qlowast) 119891 (119905 qlowast) 119889qlowast119889q (5)
and represents the average payoff of the population
Sincesum119873119894=1119902119894= 1 we can reduce the number of variables
considering
119902119873= 1 minus
119873minus1
sum
119894=1
119902119894
(6)
and obtaining the (119873 minus 1)-dimensional model (3) on thesimplex
120591119873minus1= p = (119901
1 119901
2 119901
119873minus1) isin 119877
119873minus1 119901
119894ge 0
119873minus1
sum
119894=1
119901119894le 1
(7)
namely
120597119905119891 (119905 p) = 119891 (119905 p) (int
120591119873minus1
119860 (p plowast) 119891 (119905 plowast) 119889119901lowast minus 120601 (119891))
(8)
with 119860(p plowast) defined by
119860 (p plowast) = p sdot 119860119901lowast =119873minus1
sum
119894119895=1
119886119894119895119901119894119901lowast
119895 (9)
and 120601 defined by
120601 (119891) = ∬120591119873minus1
119891 (119905 p) 119860 (p plowast) 119891 (119905 plowast) 119889plowast119889p (10)
Remark 1 (see [14]) If we take an initial condition
119891 (0 p) = 1198910(p) ge 0 (11)
with int119873minus11198910(p)119889p = 1 then it is easy to see that 119891 ge 0 for
all 119905 gt 0 and if 1198910(p) = 0 for some p then 119891(119905 p) = 0 for all
119905 gt 0 We also know that
int120591119873minus1
119891 (119905 p) 119889p = 1 forall119905 gt 0 (12)
This follows from the mass conservation by integrating(8) with respect to p and using (10) and (12) we have
120597119905int120591119873minus1
119891 (119905 p) 119889p = 0 (13)
Let us introduce the moments for 119891
119872119896(119891) = int
120591119873minus1
p119896119891 (p) 119889p = int120591119873minus1
1199011198961
11199011198962
2 119901
119896119873minus1
119873minus1119891 (p) 119889p
(14)
with k = (1198961 119896
2 119896
119873minus1) Using119872
119896(119891) the payoff and the
average payoff (10)
int120591119873minus1
119860 (p plowast) 119891 (119905 plowast) 119889plowast
=
119873minus1
sum
119895=1
119872119890119895(119891)(
119873minus1
sum
119894=1
120599119894119895119901119894+ 120589
119895) + 119886
119873119873+
119873minus1
sum
119894=1
120592119894119901119894
Journal of Computational Engineering 3
120601 (119891) =
119873minus1
sum
119895=1
119872119890119895(119891)(
119873minus1
sum
119894=1
120599119894119895119872
119890119895(119891) + 120589
119895)
+ 119886119873119873+
119873minus1
sum
119894=1
120592119894119872
119890119894(119891)
(15)
where 119890119894isin 119877
119873minus1 is the standard unit vector with the 119894thcomponent equal to 1 and all others equal to 0 Moreover120599119894119895= 119886
119894119895minus119886
119894119873minus119886
119873119895+119886
119873119873 120589119895= 119886
119873119895minus119886
119873119873 120592
119894= 119886
119894119873minus119886
119873119873
In the final formof (8) that will be used later in this paperthe only integral terms are the first moments119872
119890119894
120597119905119891 (119905 p)
= 119891 (119905 p) (119873minus1
sum
119894=1
(119901119894minus119872
119890119894(119891))(120592
119894+
119873minus1
sum
119894=1
120599119894119895119872
119890119895(119891)))
(16)
Global Existence of the Solutions We consider the Cauchyproblem (11)ndash(16) for 119905 ge 0 and 119901 isin 120591
119873minus1 that is
120597119905119891 (119905 p) = 119891 (119905 p) (
119873minus1
sum
119894=1
(119901119894minus119872
119890119894(119891))
times(120592119894+
119873minus1
sum
119894=1
120599119894119895119872
119890119895(119891)))
119891 (0 p) = 1198910(p)
(17)
with 1198910(119901) ge 0 and int
120591119873minus1
119891(119905 p)119889p = 1
Proposition 2 (local existence see [14]) For all119872 gt 0 thereexists 119879(119872) gt 0 such that if 119891
0(p) le 119872 then there exists a
unique solution 119891 isin 119862([0 ] times 120591119873minus1) for the problem (17) for
all le 119879(119872)
21 Two Strategies Games Assume there are two differentstrategies whose interplay is ruled by the payoff matrix
119860 = (119886 119887
119888 119889) (18)
In this case the simplex 1205911is just the interval [0 1] and so we
have a population where individuals are going to play the firststrategy with probability 119901 isin [0 1] and the second strategywith probability 1 minus 119901 The payoff (2) is given by
119860 (p plowast) = ( 1199011 minus 119901
)(119886 119887
119888 119889)(
119901lowast
1 minus 119901lowast)
= (119886 + 119889 minus 119887 minus 119888) 119901119901lowast+ (119887 minus 119889) 119901 + (119888 minus 119889) 119901
lowast+ 119889
= 120572119901119901lowast+ 120573119901 + 120574119901
lowast+ 120575
(19)
with
120572 = (119886 + 119889 minus 119887 minus 119888)
120573 = 119887 minus 119889
120574 = c minus 119889
120575 = 119889
(20)
The one dimensional Cauchy problem (17) reads
120597119905119891 (119901) = 119891 (119901) (120572119872
1(119891) + 120573) (119901 minus119872
1(119891))
119905 ge 0 119901 isin [0 1]
119891 (0 119901) = 1198910(119901) 119901 isin [0 1]
(21)
with 1198910(119901) ge 0 and int1
01198910(119901)119889119901 = 1
For more detail see [14]
3 Sinc Interpolation
The goal of this section is to recall notations and definition ofthe sinc function that are used The sinc approximation for afunction 119891(119909) defined on the real line 119877 is given by
119891 (119909) asymp
119873
sum
119895=minus119873
119891 (119895ℎ) 119878 (119895 ℎ) (119909) (22)
where 119878(119895 ℎ) is sinc function defined by
119878 (119895 ℎ) (119909) =sin [(120587ℎ) (119909 minus 119895ℎ)][(120587ℎ) (119909 minus 119895ℎ)]
(23)
And the step size ℎ is suitably chosen for a given positiveinteger 119899 = 2119873 + 1 Sinc for interpolation points 119909
119896= 119896ℎ
is given by
119878 (119895 ℎ) (119896ℎ) = 120575(0)
119895119896= 1 119896 = 119895
0 119896 = 119895(24)
Assuming that 119891(119905) is analytic on the real line and decaysexponentially on the real line it has been shown that the errorof the approximation decays exponentially with increasing119873 The approximation may be extended to approximate119891(119905) on the interval [0 1] by selection of an appropriatetransfer function to transform the interval onto the real lineand impose the exponential decay We denote such variabletransformation 120591 = 120601(119905) and inverse transformation 119905 =120595(120591) such that 120601(0) = minusinfin and 120601(1) = infin We may writethe sinc approximation employing the transformation for thefunction 119891(119905) to be
119891 (119909) asymp
119873
sum
119895=minus119873
119891 (120595 (119895ℎ)) 119878 (119895 ℎ) (119909) (120601 (119905)) (25)
where the mesh size ℎ represents the separation between sincpoints on the 120591 isin (minusinfininfin) domain In order to have the
4 Journal of Computational Engineering
sinc approximation on a finite interval (0 1) conformal mapis employed as follows
120601 (119911) = ln( 1199111 minus 119911
) (26)
This map carries the eye-shaped complex domain
119863119864= 119911 = 119909 + 119894119910
1003816100381610038161003816100381610038161003816arg( 119911
1 minus 119911)
1003816100381610038161003816100381610038161003816lt 119889 le
120587
2 (27)
onto the infinite strip
119863119904= 119908 = 119906 + 119894V |V| lt 119889 le
120587
2 (28)
For the sinc method the basic function on the interval (0 1)for 119911 isin 119863
119864is derived from the composite translated sinc
functions
119878119895(119911) = 119904 (119895 ℎ) 119900120601 (119911) = Sinc(
120601 (119911) minus 119895ℎ
ℎ) (29)
Exhibiting kroneckor delta behavior on the grid points
119909119896= 120601
minus1(119896ℎ) =
119890119896ℎ
1 + 119890119896ℎ 119896 = plusmn1 plusmn2 (30)
Thus we may define the inverse images of the real line and ofthe evenly space nodes 119896ℎinfin
119896=minusinfinas
Γ = 120601minus1(119909) isin 119863
119864 minusinfin lt 119909 lt infin = (0 1) (31)
And quadrature formulas for 119891(119905) over [0 1] are
119891 (119909) asymp
119873
sum
119896=minus119873
119891 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
int
1
0
119891 (119909) 119889119909 asymp ℎ
119873
sum
119896=minus119873
119891 (119909119896)
1206011015840 (119909119896)
(32)
Definition 3 Let 119861(119863119864) be the class of functions 119865 which are
analytic in119863119864satisfy
int120595(119905+119871)
|119865 (119911) 119889119911| 997888rarr 0 119905 997888rarr plusmninfin (33)
where 119871 = 119894V |V| lt 119889 le 1205872 and on the boundary of 119863119864
(denoted by 120597119863119864) satisfying
119873(119865) = int120597119863119864
|119865 (119911) 119889119911| lt infin (34)
Interpolation for function in119861(119863119864) is defined in the following
theorem whose proof can be found in [15]
Theorem 4 If 1206011015840119865 isin 119861(119863119864) then for all 119909 isin Γ
1003816100381610038161003816100381610038161003816100381610038161003816
119865 (119909) minus
infin
sum
119896=minusinfin
119865 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
1003816100381610038161003816100381610038161003816100381610038161003816
le
119873 (1198651206011015840)
2120587119889 sinh (120587119889ℎ)
le
2119873 (1198651206011015840)
120587119889119890minus120587119889ℎ
(35)
Moreover if |119865(119909)| le 119862119890minus120572|120601(119909)| 119909 isin Γ for some positiveconstants 119862 and 120572 and if the selection ℎ = radic120587119889120572119873 le
2120587119889 ln 2 then1003816100381610038161003816100381610038161003816100381610038161003816
119865 (119909) minus
119873
sum
119896=minus119873
119865 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
1003816100381610038161003816100381610038161003816100381610038161003816
le 1198622radicN exp (minusradic120587119889120572119873) 119909 isin Γ
(36)
where 1198622depends only on 119865 119889 and 120572 The above expressions
show sinc interpolation on 119861(119863119864) converge exponentially
[17] We also require derivatives of composite sinc functionsevaluated at the nodes The expressions required for the presentdiscussion are [25]
120575(0)
119896119895= [119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895= 1 119896 = 119895
0 119896 = 119895
120575(1)
119896119895=119889
119889120601[119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895=1
ℎ
0 119896 = 119895
(minus1)119895minus119896
119895 minus 119896119896 = 119895
120575(2)
119896119895=1198892
1198891206012[119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895=1
ℎ2
minus1205872
3119896 = 119895
minus2(minus1)119895minus119896
(119895 minus 119896)2119896 = 119895
(37)
4 Collocation Method
Let 119868ℎ= 119905
119899 0 = 119905
0lt 119905
1lt sdot sdot sdot lt 119905
119873= 119879 be a given
mesh (not necessarily uniform) on 119868 and set 120590119899= (119905
119899 119905119899+1]
120590119899= [119905
119899 t119899+1] with ℎ
119899= 119905
119899+1minus 119905
119899(119899 = 0 1 119873 minus 1) The
quantity ℎ = maxℎ119899 0 le 119899 le 119873 minus 1 will be called the
diameter of the mesh 119868ℎ
Definition 5 Suppose that 119868ℎis a given partition on 119868 The
piecewise polynomials space 119878(119889)120583(119868ℎ) with 120583 ge 0 minus1 le 119889 le 120583
is defined by
119878(119889)
120583(119868ℎ) = 119902 (119905) isin 119862
119889[119868 119877] 119902|120590119899
isin 120587120583 0 le 119899 le 119873 minus 1
(38)
Here 120590119899= (119905
119899 119905119899+1] and 120587
120583denote the space of
polynomials of degree not exceeding 120583 and it is easy to seethat 119878(119889)
120583(119868ℎ)
119878(119889)
120583(119868ℎ) = 119873 (120583 minus 119889) + 119889 + 1 (39)
The collocation solution is determined by 119906ℎthat satisfies the
given equation on a given suitable finite subset119883ℎof 119868 where
119883ℎcontains the collocation points
119883ℎ= 119905
119899+ 119888
119894ℎ119899 0 le 119888
1le sdot sdot sdot le 119888
119898le 1 0 le 119899 le 119873 minus 1
(40)
is determined by the points of the partition 119868ℎand the given
collocation parameters 119888119894 isin [0 1] The collocation solution
119906ℎisin 119878
(0)
119898(119868ℎ) for119910 (119905) = 119891 (119905 119910 (119905)) 119910 (0) = 119910
0 (41)
Journal of Computational Engineering 5
is defined by the collocation equation
ℎ(119905) = 119891 (119905 119906
ℎ(119905)) 119905 isin 119883
ℎ 119906
ℎ(0) = 119910
0 (42)
It will be convenient (and natural) to work with the localLagrange basis representations of 119906
ℎ These polynomials in
120590119899can be written as
119871119895(119911) = Π
119898
119896 =119895
(119911 minus 119888119896)
(119888119895minus 119888
119896)
119911 isin [0 1] 119895 = 1 119898 (43)
where 119871119895(119911) belong to 120587
119898minus1 Also we have
119906ℎ(119905119899+ Vℎ
119899) =
119898
sum
119895=1
119871119895(V) 119884
119899119895 V isin (0 1]
119884119899119895= 119906
ℎ(119905119899+ 119888
119895ℎ119899)
(44)
From (44) we can obtain the local representation of 119906ℎisin
119878(0)
119898(119868ℎ) on 120590
119899 hence we can achieve that
1199061015840
ℎ(119905119899+ Vℎ
119899) =1
ℎ119899
119898
sum
119895=1
1198711015840
119895(V) 119884
119899119895 (45)
The unknown approximations 119884119899119894(119894 = 1 119898) in (44) are
defined by the solution of a system of (generally nonlinear)algebraic equations obtained by setting 119905 = 119905
119899119894= 119905
119899+ 119888
119894ℎ119899
in the collocation equation (42) and employing the localrepresentation (44) This system is
1
ℎ119899
119898
sum
119895=1
1198711015840
119895(119888119894) 119884
119899119895= 119891 (119905
119899119894 119884
119899119894) 119894 = 1 119898 (46)
It corresponds to (44) with V = 1
119910119899+1= 119906
ℎ(119905119899+ ℎ
119899) =
119898
sum
119895=1
119871119895(1) 119884
119899119895(119899 = 0 1 119873 minus 1)
(47)
I present the result on global convergence for the linearinitial-value problem
119910 (119905) = 119886 (119905) 119910 (119905) + 119892 (119905) 119905 isin 119868 119910 (0) = 1199100 (48)
Theorem 6 Assume that
(a) the given functions in (48) satisfy 119886 119892 isin 119862119898(119868)
(b) ℎ gt 0 is such that for any ℎ isin (0 ℎ) each of the linearsystems of method has a unique solution
Then the estimates1003817100381710038171003817119910 minus 119906ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906ℎ (119905)1003816100381610038161003816 le 1198620
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (49)
1003817100381710038171003817119910 minus
ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906
ℎ(119905)1003816100381610038161003816 le 1198621
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (50)
See [34]
5 Construction of the Method
Let 0 = 1199050lt 119905
1lt sdot sdot sdot lt 119905
119873= 119879 is a partition of [0 119879]
In every interval 120590119899= (119905
119899 119905119899+1] we assume that 119891(119905 119901) 119901 isin
[0 1] solution of one dimensional mixed strategy model isapproximated by the finite expansion of sinc basis functionand Lagrange polynomials
119891 (119905 119901) ≃
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905) (51)
whereΨ119895(119905) is a polynomial of degree119898 Also initial value is
according to
119891 (119905119899 119901) = 119891
119905119899(119901) (52)
If we replace approximation (51) in (21) we have
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
1015840
119895(119905)
=
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905)
times (1205721198721(119891 (119905 p)) + 120573) (119901 minus119872
1(119891 (119905 119901)))
(53)
where1198721(119891) is taken by
1198721(119891 (119905 119901)) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896int
1
0
119901 sdot 119878 (119896 ℎ) 119900120601 (119901)Ψ119895(119905) 119889119901
(54)
By substituting collocation points for 119905 and 119901 and usingquadrature rule (32) a nonlinear system is given
After solving this system we calculate 119888119895119896
and finally119891(119905 119901) in 120590
119899 and also 119891(119905 119901) at 119905
119899+1
119891 (119905119899+1 119901) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905119899+1) (55)
where 119891(119905119899+1 119901) is used as an initial value for next interval
120590119899+1
After119873 times solution is achieved
6 Numerical Examples
Prisonerrsquos DilemmaGameOne interesting example of a gameis given by the so-called Prisonerrsquos Dilemma game in whichthere are two players and two possible strategies The playershave two options cooperate or defect The payoff matrix isthe following
119860 = (119877 119878
119879 119875) (56)
If both players cooperate both obtain 119877 fitness units (rewardpayoff) if both defect each receives 119875 (punishment payoff)if one player cooperates and the other defects the cooperator
6 Journal of Computational Engineering
2
15
1
05
0 02 04 06 08 1
p
t = 0
t = 100
t = 200
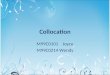
Figure 1 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = 1
gets 119878 (suckers payoff) while the defector gets 119879 (temptationpayoff) The payoff values are ranked 119879 gt 119877 gt 119875 gt 119878 and2119877 gt 119879 + 119878 We know that cooperators are always dominatedby defectors
For the numerical tests we fix the following normalizedpayoff matrix
119860 = (1 0
119887 120598) (57)
with 119887 = 11 and 120598 = 0001 In this case we have 120572 = 1 minus119887 + 120598 lt 0 and 120573 = minus120598 lt 0 and so 120573120572 gt 0 This means thatstationary solutions are expected to be given by concentratedDirac masses For general perturbation we have that 119901 = 0 islinearly stable
We In order to conform the results above initial conditionis considered as below
(1)
1198910(119901) = 1 forall119901 isin [0 1] (58)
(2)
1198910(119901) = minus119901
2+2
3119901 + 1 forall119901 isin [0 1] (59)
(3)
1198910(119901) =
2 119901 isin [1
41
2] cup [
3
4 1]
0 elsewhere(60)
For implementation of proposedmethod I usedMaple15 andplotted the numerical results in Figures 1 2 and 3 Figure 1shows that the density119891 tends to concentrate at the point 119901 =0 to what we expected
0 02 04 06 08 1
p
20
18
16
14
12
10
08
06
04
02
t = 0
t = 100
t = 200
Figure 2 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = minus119901
2+ (23)119901 + 1
3
2
1
0
02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 3 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) =
2 119901isin[1412]cup[341]
0 elsewhere
7 Conclusion
In this paper the collocation method with sinc and Lagrangepolynomials are employed to construct an approximation tothe solution of continuous mixed strategy It is found thatthe results of the present works agree well with trapezoidalrule Properties of the sinc procedure are utilized to reduce
Journal of Computational Engineering 7
the computation of this integrodifferential to some nonlin-ear equations There are several advantages over classicalmethods to using approximations based on sinc numericalmethods First unlike most numerical techniques it is nowwell-established that they are characterized by exponentiallydecaying errors Secondly approximation by sinc functionshandles singularities in the problem Thirdly due to theirrapid convergence sinc numerical methods do not sufferfrom the common instability problems associated with othernumerical methods Also in this case the advantages of col-location method are used The method is applied to testexamples to illustrate the accuracy and implementation of themethod
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] J W Weibull Evolutionary GameTheory The MIT Press 1995[2] D Fudenberg and D LevineTheTheory o f Learning in Games
MIT Press 1998[3] L Samuelson Evolutionary Games and Equilibrium Selection
MIT Press 1998[4] J Hofbauer and K Sigmund Evolutionary Games and Popula-
tion Dynamics Cambridge University Press Cambridge UK1998
[5] H Gintis Game Theory Evolving Princeton University Press2000
[6] R Cressman Evolutionary Dynamics and Extensive FormGames MIT Press 2003
[7] Th Vincent and J Brown Evolutionary Game Theory Natu-ral Selection and Darwinian Dynamics Cambridge UniversityPress Cambridge UK 2005
[8] J Hofbauer and K Sigmund ldquoEvolutionary game dynamicsrdquoBulletin of the AmericanMathematical Society vol 40 no 4 pp479ndash519 2003
[9] I M Bomze ldquoDynamical aspects of evolutionary stabilityrdquoMonatshefte furMathematik vol 110 no 3-4 pp 189ndash206 1990
[10] R Cressman ldquoStability of the replicator equation with continu-ous strategy spacerdquoMathematical Social Sciences vol 50 no 2pp 127ndash147 2005
[11] J Hofbauer J Oechssler and F Riedel ldquoBrown-von Neumann-NASh dynamics the continuous strategy caserdquo Games andEconomic Behavior vol 65 no 2 pp 406ndash429 2009
[12] T W L Norman ldquoDynamically stable sets in infinite strategyspacesrdquo Games and Economic Behavior vol 62 no 2 pp 610ndash627 2008
[13] J Oechssler and F Riedel ldquoEvolutionary dynamics on infinitestrategy spacesrdquoEconomicTheory vol 17 no 1 pp 141ndash162 2001
[14] A Boccabella R Natalini and L Pareschi ldquoOn a continuousmixed strategies model for evolutionary game theoryrdquo Kineticand Related Models vol 4 no 1 pp 187ndash213 2011
[15] F Stenger Numerical Methods Based on Sinc and AnalyticFunctions Springer New York NY USA 1993
[16] J Lund and K L Bowers Sinc Methods for Quadrature andDifferential Equations SIAM Philadelphia Pennsylvania USA1992
[17] D F Winter K L Bowers and J Lund ldquoWind-driven currentsin a sea with a variable eddy viscosity calculated via a Sinc-Galerkin techniquerdquo International Journal for Numerical Meth-ods in Fluids vol 33 no 7 pp 1041ndash1073 2000
[18] B Bialecki ldquoSinc-collocation methods for two-point boundaryvalue problemsrdquo IMA Journal of Numerical Analysis vol 11 no3 pp 357ndash375 1991
[19] K Parand and A Pirkhedri ldquoSinc-Collocationmethod for solv-ing astrophysics equationsrdquo New Astronomy vol 15 no 6 pp533ndash537 2010
[20] K Parand M Dehghan and A Pirkhedri ldquoSinc-collocationmethod for solving the Blasius equationrdquo Physics Letters A vol373 no 44 pp 4060ndash4065 2009
[21] K Parand Z Delafkar N Pakniat A Pirkhedri andM K HajildquoCollocation method using sinc and rational Legendre func-tions for solving Volterrarsquos population modelrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 16 no 4pp 1811ndash1819 2011
[22] A Saadatmandi M Razzaghi and M Dehghan ldquoSinc-collo-cation methods for the solution of Hallens integral equationrdquoJournal of Electromagnetic Waves and Applications vol 19 no2 pp 245ndash256 2005
[23] A Saadatmandi and M Razzaghi ldquoThe numerical solution ofthird-order boundary value problems using sinc-collocationmethodrdquo Communications in Numerical Methods in Engineer-ing vol 23 no 7 pp 681ndash689 2007
[24] M Dehghan and A Saadatmandi ldquoThe numerical solution ofa nonlinear system of second-order boundary value problemsusing the sinc-collocation methodrdquo Mathematical and Com-puter Modelling vol 46 no 11-12 pp 1434ndash1441 2007
[25] M El-Gamel S H Behiry andHHashish ldquoNumerical methodfor the solution of special nonlinear fourth-order boundaryvalue problemsrdquo Applied Mathematics and Computation vol145 no 2-3 pp 717ndash734 2003
[26] P N Dinh Alain P H Quan and D D Trong ldquoSinc approx-imation of the heat distribution on the boundary of a two-dimensional finite slabrdquo Nonlinear Analysis Real World Appli-cations vol 9 no 3 pp 1103ndash1111 2008
[27] K Abdella X Yu and I Kucuk ldquoApplication of the Sincmethodto a dynamic elasto-plastic problemrdquo Journal of Computationaland Applied Mathematics vol 223 no 2 pp 626ndash645 2009
[28] J Lund and C R Vogel ldquoA fully-Galerkin method for thenumerical solution of an inverse problem in a parabolic partialdifferential equationrdquo Inverse Problems vol 6 no 2 pp 205ndash2171990
[29] A Shidfar R Zolfaghari and J Damirchi ldquoApplication of sinc-collocation method for solving an inverse problemrdquo Journal ofComputational and Applied Mathematics vol 233 no 2 pp545ndash554 2009
[30] J Rashidinia and M Zarebnia ldquoThe numerical solution ofintegro-differential equation by means of the sinc methodrdquoAppliedMathematics and Computation vol 188 no 2 pp 1124ndash1130 2007
[31] M El-Gamel and A I Zayed ldquoSinc-Galerkin method for solv-ing nonlinear boundary-value problemsrdquo Computers amp Mathe-matics with Applications vol 48 no 9 pp 1285ndash1298 2004
[32] A Saadatmandi and M Dehghan ldquoThe use of sinc-collocationmethod for solving multi-point boundary value problemsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 17 no 2 pp 593ndash601 2012
8 Journal of Computational Engineering
[33] A Mohsen and M El-Gamel ldquoOn the numerical solution oflinear and nonlinear Volterra integral and integro-differentialequationsrdquo Applied Mathematics and Computation vol 217 no7 pp 3330ndash3337 2010
[34] H Brunner Collocation Methods for Volterra Integral and Re-lated Functional Differential Equations Cambridge UniversityPress 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Journal of Computational Engineering
set defines what strategies are available for them to play Apure strategy provides a complete definition of how a playerwill play a game In particular it determines themove a playerwill make for any situation he or she could face A playerrsquosstrategy set is the set of pure strategies available to that playerA mixed strategy is an assignment of a probability to eachpure strategy This allows for a player to randomly select apure strategy Since probabilities are continuous there areinfinitely many mixed strategies available to a player even iftheir strategy set is finite
A payoff is a number also called utility that reflects thedesirability of an outcome to a player for whatever reasonWhen the outcome is random payoffs are usually weightedwith their probabilitiesThe expected payoff incorporates theplayerrsquos attitude towards risk
Assume that we have a game where there are 119873 purestrategies 119877
1to 119877
119873and that the players can use mixed
strategies this consists of playing the pure strategies 1198771to 119877
119873
with some probabilities 1199021to 119902
119873with 119902
119894ge 0 and sum119902
119894= 1 A
strategy corresponds to a point q in the simplex
119878119873minus1= q = (119902
1 119902
2 119902
119873) isin 119877
119873 119902
119894ge 0
119873
sum
119894=1
119902119894= 1 (1)
The corners of the simplex are the standard unit vectorse119894 where the 119894th component is 1 and all others are 0 and
correspond to the119873 pure strategies 119877119894 119894 = 1 119873
Let us denote by 119886119894119895the payoff for a player using the pure
strategy 119877119894against a player using the pure strategy 119877
119895 Here
Matrix 119860 = (119886119894119895) is called payoff matrix An 119877
119894-strategist
obtain the expected payoff (119860qlowast)119894= sum
119895119886119894119895119902lowast
119895against a qlowast-
strategist The payoff for a q-startegist against a qlowast strategistis given by
119860 (q qlowast) = q sdot 119860qlowast =119873
sum
119894119895=1
119886119894119895119902119894119902lowast
119895 (2)
We consider a population of individuals as a player ofthe game and denote by 119891(119905 q) the density of populationadopting the q strategy at time 119905 the evolution in time of 119891due to dynamics of the game is driven by
120597119905119891 (119905 q) = 119891 (119905 q) (int
119878119873
119860 (q qlowast) 119891 (119905 qlowast) 119889qlowast minus 120601 (119891))
(3)
where the term
int119878119873
119860 (q qlowast) 119891 (119905 qlowast) 119889qlowast (4)
represents the payoff of the strategy q against all the othersstrategies 119860(q qlowast) being the interacting kernel between theq-strategist and the qlowast-strategist The last term of (3) isdefined by
120601 (119891) = ∬119878119873
119891 (119905 q) 119860 (q qlowast) 119891 (119905 qlowast) 119889qlowast119889q (5)
and represents the average payoff of the population
Sincesum119873119894=1119902119894= 1 we can reduce the number of variables
considering
119902119873= 1 minus
119873minus1
sum
119894=1
119902119894
(6)
and obtaining the (119873 minus 1)-dimensional model (3) on thesimplex
120591119873minus1= p = (119901
1 119901
2 119901
119873minus1) isin 119877
119873minus1 119901
119894ge 0
119873minus1
sum
119894=1
119901119894le 1
(7)
namely
120597119905119891 (119905 p) = 119891 (119905 p) (int
120591119873minus1
119860 (p plowast) 119891 (119905 plowast) 119889119901lowast minus 120601 (119891))
(8)
with 119860(p plowast) defined by
119860 (p plowast) = p sdot 119860119901lowast =119873minus1
sum
119894119895=1
119886119894119895119901119894119901lowast
119895 (9)
and 120601 defined by
120601 (119891) = ∬120591119873minus1
119891 (119905 p) 119860 (p plowast) 119891 (119905 plowast) 119889plowast119889p (10)
Remark 1 (see [14]) If we take an initial condition
119891 (0 p) = 1198910(p) ge 0 (11)
with int119873minus11198910(p)119889p = 1 then it is easy to see that 119891 ge 0 for
all 119905 gt 0 and if 1198910(p) = 0 for some p then 119891(119905 p) = 0 for all
119905 gt 0 We also know that
int120591119873minus1
119891 (119905 p) 119889p = 1 forall119905 gt 0 (12)
This follows from the mass conservation by integrating(8) with respect to p and using (10) and (12) we have
120597119905int120591119873minus1
119891 (119905 p) 119889p = 0 (13)
Let us introduce the moments for 119891
119872119896(119891) = int
120591119873minus1
p119896119891 (p) 119889p = int120591119873minus1
1199011198961
11199011198962
2 119901
119896119873minus1
119873minus1119891 (p) 119889p
(14)
with k = (1198961 119896
2 119896
119873minus1) Using119872
119896(119891) the payoff and the
average payoff (10)
int120591119873minus1
119860 (p plowast) 119891 (119905 plowast) 119889plowast
=
119873minus1
sum
119895=1
119872119890119895(119891)(
119873minus1
sum
119894=1
120599119894119895119901119894+ 120589
119895) + 119886
119873119873+
119873minus1
sum
119894=1
120592119894119901119894
Journal of Computational Engineering 3
120601 (119891) =
119873minus1
sum
119895=1
119872119890119895(119891)(
119873minus1
sum
119894=1
120599119894119895119872
119890119895(119891) + 120589
119895)
+ 119886119873119873+
119873minus1
sum
119894=1
120592119894119872
119890119894(119891)
(15)
where 119890119894isin 119877
119873minus1 is the standard unit vector with the 119894thcomponent equal to 1 and all others equal to 0 Moreover120599119894119895= 119886
119894119895minus119886
119894119873minus119886
119873119895+119886
119873119873 120589119895= 119886
119873119895minus119886
119873119873 120592
119894= 119886
119894119873minus119886
119873119873
In the final formof (8) that will be used later in this paperthe only integral terms are the first moments119872
119890119894
120597119905119891 (119905 p)
= 119891 (119905 p) (119873minus1
sum
119894=1
(119901119894minus119872
119890119894(119891))(120592
119894+
119873minus1
sum
119894=1
120599119894119895119872
119890119895(119891)))
(16)
Global Existence of the Solutions We consider the Cauchyproblem (11)ndash(16) for 119905 ge 0 and 119901 isin 120591
119873minus1 that is
120597119905119891 (119905 p) = 119891 (119905 p) (
119873minus1
sum
119894=1
(119901119894minus119872
119890119894(119891))
times(120592119894+
119873minus1
sum
119894=1
120599119894119895119872
119890119895(119891)))
119891 (0 p) = 1198910(p)
(17)
with 1198910(119901) ge 0 and int
120591119873minus1
119891(119905 p)119889p = 1
Proposition 2 (local existence see [14]) For all119872 gt 0 thereexists 119879(119872) gt 0 such that if 119891
0(p) le 119872 then there exists a
unique solution 119891 isin 119862([0 ] times 120591119873minus1) for the problem (17) for
all le 119879(119872)
21 Two Strategies Games Assume there are two differentstrategies whose interplay is ruled by the payoff matrix
119860 = (119886 119887
119888 119889) (18)
In this case the simplex 1205911is just the interval [0 1] and so we
have a population where individuals are going to play the firststrategy with probability 119901 isin [0 1] and the second strategywith probability 1 minus 119901 The payoff (2) is given by
119860 (p plowast) = ( 1199011 minus 119901
)(119886 119887
119888 119889)(
119901lowast
1 minus 119901lowast)
= (119886 + 119889 minus 119887 minus 119888) 119901119901lowast+ (119887 minus 119889) 119901 + (119888 minus 119889) 119901
lowast+ 119889
= 120572119901119901lowast+ 120573119901 + 120574119901
lowast+ 120575
(19)
with
120572 = (119886 + 119889 minus 119887 minus 119888)
120573 = 119887 minus 119889
120574 = c minus 119889
120575 = 119889
(20)
The one dimensional Cauchy problem (17) reads
120597119905119891 (119901) = 119891 (119901) (120572119872
1(119891) + 120573) (119901 minus119872
1(119891))
119905 ge 0 119901 isin [0 1]
119891 (0 119901) = 1198910(119901) 119901 isin [0 1]
(21)
with 1198910(119901) ge 0 and int1
01198910(119901)119889119901 = 1
For more detail see [14]
3 Sinc Interpolation
The goal of this section is to recall notations and definition ofthe sinc function that are used The sinc approximation for afunction 119891(119909) defined on the real line 119877 is given by
119891 (119909) asymp
119873
sum
119895=minus119873
119891 (119895ℎ) 119878 (119895 ℎ) (119909) (22)
where 119878(119895 ℎ) is sinc function defined by
119878 (119895 ℎ) (119909) =sin [(120587ℎ) (119909 minus 119895ℎ)][(120587ℎ) (119909 minus 119895ℎ)]
(23)
And the step size ℎ is suitably chosen for a given positiveinteger 119899 = 2119873 + 1 Sinc for interpolation points 119909
119896= 119896ℎ
is given by
119878 (119895 ℎ) (119896ℎ) = 120575(0)
119895119896= 1 119896 = 119895
0 119896 = 119895(24)
Assuming that 119891(119905) is analytic on the real line and decaysexponentially on the real line it has been shown that the errorof the approximation decays exponentially with increasing119873 The approximation may be extended to approximate119891(119905) on the interval [0 1] by selection of an appropriatetransfer function to transform the interval onto the real lineand impose the exponential decay We denote such variabletransformation 120591 = 120601(119905) and inverse transformation 119905 =120595(120591) such that 120601(0) = minusinfin and 120601(1) = infin We may writethe sinc approximation employing the transformation for thefunction 119891(119905) to be
119891 (119909) asymp
119873
sum
119895=minus119873
119891 (120595 (119895ℎ)) 119878 (119895 ℎ) (119909) (120601 (119905)) (25)
where the mesh size ℎ represents the separation between sincpoints on the 120591 isin (minusinfininfin) domain In order to have the
4 Journal of Computational Engineering
sinc approximation on a finite interval (0 1) conformal mapis employed as follows
120601 (119911) = ln( 1199111 minus 119911
) (26)
This map carries the eye-shaped complex domain
119863119864= 119911 = 119909 + 119894119910
1003816100381610038161003816100381610038161003816arg( 119911
1 minus 119911)
1003816100381610038161003816100381610038161003816lt 119889 le
120587
2 (27)
onto the infinite strip
119863119904= 119908 = 119906 + 119894V |V| lt 119889 le
120587
2 (28)
For the sinc method the basic function on the interval (0 1)for 119911 isin 119863
119864is derived from the composite translated sinc
functions
119878119895(119911) = 119904 (119895 ℎ) 119900120601 (119911) = Sinc(
120601 (119911) minus 119895ℎ
ℎ) (29)
Exhibiting kroneckor delta behavior on the grid points
119909119896= 120601
minus1(119896ℎ) =
119890119896ℎ
1 + 119890119896ℎ 119896 = plusmn1 plusmn2 (30)
Thus we may define the inverse images of the real line and ofthe evenly space nodes 119896ℎinfin
119896=minusinfinas
Γ = 120601minus1(119909) isin 119863
119864 minusinfin lt 119909 lt infin = (0 1) (31)
And quadrature formulas for 119891(119905) over [0 1] are
119891 (119909) asymp
119873
sum
119896=minus119873
119891 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
int
1
0
119891 (119909) 119889119909 asymp ℎ
119873
sum
119896=minus119873
119891 (119909119896)
1206011015840 (119909119896)
(32)
Definition 3 Let 119861(119863119864) be the class of functions 119865 which are
analytic in119863119864satisfy
int120595(119905+119871)
|119865 (119911) 119889119911| 997888rarr 0 119905 997888rarr plusmninfin (33)
where 119871 = 119894V |V| lt 119889 le 1205872 and on the boundary of 119863119864
(denoted by 120597119863119864) satisfying
119873(119865) = int120597119863119864
|119865 (119911) 119889119911| lt infin (34)
Interpolation for function in119861(119863119864) is defined in the following
theorem whose proof can be found in [15]
Theorem 4 If 1206011015840119865 isin 119861(119863119864) then for all 119909 isin Γ
1003816100381610038161003816100381610038161003816100381610038161003816
119865 (119909) minus
infin
sum
119896=minusinfin
119865 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
1003816100381610038161003816100381610038161003816100381610038161003816
le
119873 (1198651206011015840)
2120587119889 sinh (120587119889ℎ)
le
2119873 (1198651206011015840)
120587119889119890minus120587119889ℎ
(35)
Moreover if |119865(119909)| le 119862119890minus120572|120601(119909)| 119909 isin Γ for some positiveconstants 119862 and 120572 and if the selection ℎ = radic120587119889120572119873 le
2120587119889 ln 2 then1003816100381610038161003816100381610038161003816100381610038161003816
119865 (119909) minus
119873
sum
119896=minus119873
119865 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
1003816100381610038161003816100381610038161003816100381610038161003816
le 1198622radicN exp (minusradic120587119889120572119873) 119909 isin Γ
(36)
where 1198622depends only on 119865 119889 and 120572 The above expressions
show sinc interpolation on 119861(119863119864) converge exponentially
[17] We also require derivatives of composite sinc functionsevaluated at the nodes The expressions required for the presentdiscussion are [25]
120575(0)
119896119895= [119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895= 1 119896 = 119895
0 119896 = 119895
120575(1)
119896119895=119889
119889120601[119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895=1
ℎ
0 119896 = 119895
(minus1)119895minus119896
119895 minus 119896119896 = 119895
120575(2)
119896119895=1198892
1198891206012[119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895=1
ℎ2
minus1205872
3119896 = 119895
minus2(minus1)119895minus119896
(119895 minus 119896)2119896 = 119895
(37)
4 Collocation Method
Let 119868ℎ= 119905
119899 0 = 119905
0lt 119905
1lt sdot sdot sdot lt 119905
119873= 119879 be a given
mesh (not necessarily uniform) on 119868 and set 120590119899= (119905
119899 119905119899+1]
120590119899= [119905
119899 t119899+1] with ℎ
119899= 119905
119899+1minus 119905
119899(119899 = 0 1 119873 minus 1) The
quantity ℎ = maxℎ119899 0 le 119899 le 119873 minus 1 will be called the
diameter of the mesh 119868ℎ
Definition 5 Suppose that 119868ℎis a given partition on 119868 The
piecewise polynomials space 119878(119889)120583(119868ℎ) with 120583 ge 0 minus1 le 119889 le 120583
is defined by
119878(119889)
120583(119868ℎ) = 119902 (119905) isin 119862
119889[119868 119877] 119902|120590119899
isin 120587120583 0 le 119899 le 119873 minus 1
(38)
Here 120590119899= (119905
119899 119905119899+1] and 120587
120583denote the space of
polynomials of degree not exceeding 120583 and it is easy to seethat 119878(119889)
120583(119868ℎ)
119878(119889)
120583(119868ℎ) = 119873 (120583 minus 119889) + 119889 + 1 (39)
The collocation solution is determined by 119906ℎthat satisfies the
given equation on a given suitable finite subset119883ℎof 119868 where
119883ℎcontains the collocation points
119883ℎ= 119905
119899+ 119888
119894ℎ119899 0 le 119888
1le sdot sdot sdot le 119888
119898le 1 0 le 119899 le 119873 minus 1
(40)
is determined by the points of the partition 119868ℎand the given
collocation parameters 119888119894 isin [0 1] The collocation solution
119906ℎisin 119878
(0)
119898(119868ℎ) for119910 (119905) = 119891 (119905 119910 (119905)) 119910 (0) = 119910
0 (41)
Journal of Computational Engineering 5
is defined by the collocation equation
ℎ(119905) = 119891 (119905 119906
ℎ(119905)) 119905 isin 119883
ℎ 119906
ℎ(0) = 119910
0 (42)
It will be convenient (and natural) to work with the localLagrange basis representations of 119906
ℎ These polynomials in
120590119899can be written as
119871119895(119911) = Π
119898
119896 =119895
(119911 minus 119888119896)
(119888119895minus 119888
119896)
119911 isin [0 1] 119895 = 1 119898 (43)
where 119871119895(119911) belong to 120587
119898minus1 Also we have
119906ℎ(119905119899+ Vℎ
119899) =
119898
sum
119895=1
119871119895(V) 119884
119899119895 V isin (0 1]
119884119899119895= 119906
ℎ(119905119899+ 119888
119895ℎ119899)
(44)
From (44) we can obtain the local representation of 119906ℎisin
119878(0)
119898(119868ℎ) on 120590
119899 hence we can achieve that
1199061015840
ℎ(119905119899+ Vℎ
119899) =1
ℎ119899
119898
sum
119895=1
1198711015840
119895(V) 119884
119899119895 (45)
The unknown approximations 119884119899119894(119894 = 1 119898) in (44) are
defined by the solution of a system of (generally nonlinear)algebraic equations obtained by setting 119905 = 119905
119899119894= 119905
119899+ 119888
119894ℎ119899
in the collocation equation (42) and employing the localrepresentation (44) This system is
1
ℎ119899
119898
sum
119895=1
1198711015840
119895(119888119894) 119884
119899119895= 119891 (119905
119899119894 119884
119899119894) 119894 = 1 119898 (46)
It corresponds to (44) with V = 1
119910119899+1= 119906
ℎ(119905119899+ ℎ
119899) =
119898
sum
119895=1
119871119895(1) 119884
119899119895(119899 = 0 1 119873 minus 1)
(47)
I present the result on global convergence for the linearinitial-value problem
119910 (119905) = 119886 (119905) 119910 (119905) + 119892 (119905) 119905 isin 119868 119910 (0) = 1199100 (48)
Theorem 6 Assume that
(a) the given functions in (48) satisfy 119886 119892 isin 119862119898(119868)
(b) ℎ gt 0 is such that for any ℎ isin (0 ℎ) each of the linearsystems of method has a unique solution
Then the estimates1003817100381710038171003817119910 minus 119906ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906ℎ (119905)1003816100381610038161003816 le 1198620
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (49)
1003817100381710038171003817119910 minus
ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906
ℎ(119905)1003816100381610038161003816 le 1198621
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (50)
See [34]
5 Construction of the Method
Let 0 = 1199050lt 119905
1lt sdot sdot sdot lt 119905
119873= 119879 is a partition of [0 119879]
In every interval 120590119899= (119905
119899 119905119899+1] we assume that 119891(119905 119901) 119901 isin
[0 1] solution of one dimensional mixed strategy model isapproximated by the finite expansion of sinc basis functionand Lagrange polynomials
119891 (119905 119901) ≃
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905) (51)
whereΨ119895(119905) is a polynomial of degree119898 Also initial value is
according to
119891 (119905119899 119901) = 119891
119905119899(119901) (52)
If we replace approximation (51) in (21) we have
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
1015840
119895(119905)
=
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905)
times (1205721198721(119891 (119905 p)) + 120573) (119901 minus119872
1(119891 (119905 119901)))
(53)
where1198721(119891) is taken by
1198721(119891 (119905 119901)) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896int
1
0
119901 sdot 119878 (119896 ℎ) 119900120601 (119901)Ψ119895(119905) 119889119901
(54)
By substituting collocation points for 119905 and 119901 and usingquadrature rule (32) a nonlinear system is given
After solving this system we calculate 119888119895119896
and finally119891(119905 119901) in 120590
119899 and also 119891(119905 119901) at 119905
119899+1
119891 (119905119899+1 119901) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905119899+1) (55)
where 119891(119905119899+1 119901) is used as an initial value for next interval
120590119899+1
After119873 times solution is achieved
6 Numerical Examples
Prisonerrsquos DilemmaGameOne interesting example of a gameis given by the so-called Prisonerrsquos Dilemma game in whichthere are two players and two possible strategies The playershave two options cooperate or defect The payoff matrix isthe following
119860 = (119877 119878
119879 119875) (56)
If both players cooperate both obtain 119877 fitness units (rewardpayoff) if both defect each receives 119875 (punishment payoff)if one player cooperates and the other defects the cooperator
6 Journal of Computational Engineering
2
15
1
05
0 02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 1 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = 1
gets 119878 (suckers payoff) while the defector gets 119879 (temptationpayoff) The payoff values are ranked 119879 gt 119877 gt 119875 gt 119878 and2119877 gt 119879 + 119878 We know that cooperators are always dominatedby defectors
For the numerical tests we fix the following normalizedpayoff matrix
119860 = (1 0
119887 120598) (57)
with 119887 = 11 and 120598 = 0001 In this case we have 120572 = 1 minus119887 + 120598 lt 0 and 120573 = minus120598 lt 0 and so 120573120572 gt 0 This means thatstationary solutions are expected to be given by concentratedDirac masses For general perturbation we have that 119901 = 0 islinearly stable
We In order to conform the results above initial conditionis considered as below
(1)
1198910(119901) = 1 forall119901 isin [0 1] (58)
(2)
1198910(119901) = minus119901
2+2
3119901 + 1 forall119901 isin [0 1] (59)
(3)
1198910(119901) =
2 119901 isin [1
41
2] cup [
3
4 1]
0 elsewhere(60)
For implementation of proposedmethod I usedMaple15 andplotted the numerical results in Figures 1 2 and 3 Figure 1shows that the density119891 tends to concentrate at the point 119901 =0 to what we expected
0 02 04 06 08 1
p
20
18
16
14
12
10
08
06
04
02
t = 0
t = 100
t = 200
Figure 2 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = minus119901
2+ (23)119901 + 1
3
2
1
0
02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 3 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) =
2 119901isin[1412]cup[341]
0 elsewhere
7 Conclusion
In this paper the collocation method with sinc and Lagrangepolynomials are employed to construct an approximation tothe solution of continuous mixed strategy It is found thatthe results of the present works agree well with trapezoidalrule Properties of the sinc procedure are utilized to reduce
Journal of Computational Engineering 7
the computation of this integrodifferential to some nonlin-ear equations There are several advantages over classicalmethods to using approximations based on sinc numericalmethods First unlike most numerical techniques it is nowwell-established that they are characterized by exponentiallydecaying errors Secondly approximation by sinc functionshandles singularities in the problem Thirdly due to theirrapid convergence sinc numerical methods do not sufferfrom the common instability problems associated with othernumerical methods Also in this case the advantages of col-location method are used The method is applied to testexamples to illustrate the accuracy and implementation of themethod
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] J W Weibull Evolutionary GameTheory The MIT Press 1995[2] D Fudenberg and D LevineTheTheory o f Learning in Games
MIT Press 1998[3] L Samuelson Evolutionary Games and Equilibrium Selection
MIT Press 1998[4] J Hofbauer and K Sigmund Evolutionary Games and Popula-
tion Dynamics Cambridge University Press Cambridge UK1998
[5] H Gintis Game Theory Evolving Princeton University Press2000
[6] R Cressman Evolutionary Dynamics and Extensive FormGames MIT Press 2003
[7] Th Vincent and J Brown Evolutionary Game Theory Natu-ral Selection and Darwinian Dynamics Cambridge UniversityPress Cambridge UK 2005
[8] J Hofbauer and K Sigmund ldquoEvolutionary game dynamicsrdquoBulletin of the AmericanMathematical Society vol 40 no 4 pp479ndash519 2003
[9] I M Bomze ldquoDynamical aspects of evolutionary stabilityrdquoMonatshefte furMathematik vol 110 no 3-4 pp 189ndash206 1990
[10] R Cressman ldquoStability of the replicator equation with continu-ous strategy spacerdquoMathematical Social Sciences vol 50 no 2pp 127ndash147 2005
[11] J Hofbauer J Oechssler and F Riedel ldquoBrown-von Neumann-NASh dynamics the continuous strategy caserdquo Games andEconomic Behavior vol 65 no 2 pp 406ndash429 2009
[12] T W L Norman ldquoDynamically stable sets in infinite strategyspacesrdquo Games and Economic Behavior vol 62 no 2 pp 610ndash627 2008
[13] J Oechssler and F Riedel ldquoEvolutionary dynamics on infinitestrategy spacesrdquoEconomicTheory vol 17 no 1 pp 141ndash162 2001
[14] A Boccabella R Natalini and L Pareschi ldquoOn a continuousmixed strategies model for evolutionary game theoryrdquo Kineticand Related Models vol 4 no 1 pp 187ndash213 2011
[15] F Stenger Numerical Methods Based on Sinc and AnalyticFunctions Springer New York NY USA 1993
[16] J Lund and K L Bowers Sinc Methods for Quadrature andDifferential Equations SIAM Philadelphia Pennsylvania USA1992
[17] D F Winter K L Bowers and J Lund ldquoWind-driven currentsin a sea with a variable eddy viscosity calculated via a Sinc-Galerkin techniquerdquo International Journal for Numerical Meth-ods in Fluids vol 33 no 7 pp 1041ndash1073 2000
[18] B Bialecki ldquoSinc-collocation methods for two-point boundaryvalue problemsrdquo IMA Journal of Numerical Analysis vol 11 no3 pp 357ndash375 1991
[19] K Parand and A Pirkhedri ldquoSinc-Collocationmethod for solv-ing astrophysics equationsrdquo New Astronomy vol 15 no 6 pp533ndash537 2010
[20] K Parand M Dehghan and A Pirkhedri ldquoSinc-collocationmethod for solving the Blasius equationrdquo Physics Letters A vol373 no 44 pp 4060ndash4065 2009
[21] K Parand Z Delafkar N Pakniat A Pirkhedri andM K HajildquoCollocation method using sinc and rational Legendre func-tions for solving Volterrarsquos population modelrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 16 no 4pp 1811ndash1819 2011
[22] A Saadatmandi M Razzaghi and M Dehghan ldquoSinc-collo-cation methods for the solution of Hallens integral equationrdquoJournal of Electromagnetic Waves and Applications vol 19 no2 pp 245ndash256 2005
[23] A Saadatmandi and M Razzaghi ldquoThe numerical solution ofthird-order boundary value problems using sinc-collocationmethodrdquo Communications in Numerical Methods in Engineer-ing vol 23 no 7 pp 681ndash689 2007
[24] M Dehghan and A Saadatmandi ldquoThe numerical solution ofa nonlinear system of second-order boundary value problemsusing the sinc-collocation methodrdquo Mathematical and Com-puter Modelling vol 46 no 11-12 pp 1434ndash1441 2007
[25] M El-Gamel S H Behiry andHHashish ldquoNumerical methodfor the solution of special nonlinear fourth-order boundaryvalue problemsrdquo Applied Mathematics and Computation vol145 no 2-3 pp 717ndash734 2003
[26] P N Dinh Alain P H Quan and D D Trong ldquoSinc approx-imation of the heat distribution on the boundary of a two-dimensional finite slabrdquo Nonlinear Analysis Real World Appli-cations vol 9 no 3 pp 1103ndash1111 2008
[27] K Abdella X Yu and I Kucuk ldquoApplication of the Sincmethodto a dynamic elasto-plastic problemrdquo Journal of Computationaland Applied Mathematics vol 223 no 2 pp 626ndash645 2009
[28] J Lund and C R Vogel ldquoA fully-Galerkin method for thenumerical solution of an inverse problem in a parabolic partialdifferential equationrdquo Inverse Problems vol 6 no 2 pp 205ndash2171990
[29] A Shidfar R Zolfaghari and J Damirchi ldquoApplication of sinc-collocation method for solving an inverse problemrdquo Journal ofComputational and Applied Mathematics vol 233 no 2 pp545ndash554 2009
[30] J Rashidinia and M Zarebnia ldquoThe numerical solution ofintegro-differential equation by means of the sinc methodrdquoAppliedMathematics and Computation vol 188 no 2 pp 1124ndash1130 2007
[31] M El-Gamel and A I Zayed ldquoSinc-Galerkin method for solv-ing nonlinear boundary-value problemsrdquo Computers amp Mathe-matics with Applications vol 48 no 9 pp 1285ndash1298 2004
[32] A Saadatmandi and M Dehghan ldquoThe use of sinc-collocationmethod for solving multi-point boundary value problemsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 17 no 2 pp 593ndash601 2012
8 Journal of Computational Engineering
[33] A Mohsen and M El-Gamel ldquoOn the numerical solution oflinear and nonlinear Volterra integral and integro-differentialequationsrdquo Applied Mathematics and Computation vol 217 no7 pp 3330ndash3337 2010
[34] H Brunner Collocation Methods for Volterra Integral and Re-lated Functional Differential Equations Cambridge UniversityPress 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Computational Engineering 3
120601 (119891) =
119873minus1
sum
119895=1
119872119890119895(119891)(
119873minus1
sum
119894=1
120599119894119895119872
119890119895(119891) + 120589
119895)
+ 119886119873119873+
119873minus1
sum
119894=1
120592119894119872
119890119894(119891)
(15)
where 119890119894isin 119877
119873minus1 is the standard unit vector with the 119894thcomponent equal to 1 and all others equal to 0 Moreover120599119894119895= 119886
119894119895minus119886
119894119873minus119886
119873119895+119886
119873119873 120589119895= 119886
119873119895minus119886
119873119873 120592
119894= 119886
119894119873minus119886
119873119873
In the final formof (8) that will be used later in this paperthe only integral terms are the first moments119872
119890119894
120597119905119891 (119905 p)
= 119891 (119905 p) (119873minus1
sum
119894=1
(119901119894minus119872
119890119894(119891))(120592
119894+
119873minus1
sum
119894=1
120599119894119895119872
119890119895(119891)))
(16)
Global Existence of the Solutions We consider the Cauchyproblem (11)ndash(16) for 119905 ge 0 and 119901 isin 120591
119873minus1 that is
120597119905119891 (119905 p) = 119891 (119905 p) (
119873minus1
sum
119894=1
(119901119894minus119872
119890119894(119891))
times(120592119894+
119873minus1
sum
119894=1
120599119894119895119872
119890119895(119891)))
119891 (0 p) = 1198910(p)
(17)
with 1198910(119901) ge 0 and int
120591119873minus1
119891(119905 p)119889p = 1
Proposition 2 (local existence see [14]) For all119872 gt 0 thereexists 119879(119872) gt 0 such that if 119891
0(p) le 119872 then there exists a
unique solution 119891 isin 119862([0 ] times 120591119873minus1) for the problem (17) for
all le 119879(119872)
21 Two Strategies Games Assume there are two differentstrategies whose interplay is ruled by the payoff matrix
119860 = (119886 119887
119888 119889) (18)
In this case the simplex 1205911is just the interval [0 1] and so we
have a population where individuals are going to play the firststrategy with probability 119901 isin [0 1] and the second strategywith probability 1 minus 119901 The payoff (2) is given by
119860 (p plowast) = ( 1199011 minus 119901
)(119886 119887
119888 119889)(
119901lowast
1 minus 119901lowast)
= (119886 + 119889 minus 119887 minus 119888) 119901119901lowast+ (119887 minus 119889) 119901 + (119888 minus 119889) 119901
lowast+ 119889
= 120572119901119901lowast+ 120573119901 + 120574119901
lowast+ 120575
(19)
with
120572 = (119886 + 119889 minus 119887 minus 119888)
120573 = 119887 minus 119889
120574 = c minus 119889
120575 = 119889
(20)
The one dimensional Cauchy problem (17) reads
120597119905119891 (119901) = 119891 (119901) (120572119872
1(119891) + 120573) (119901 minus119872
1(119891))
119905 ge 0 119901 isin [0 1]
119891 (0 119901) = 1198910(119901) 119901 isin [0 1]
(21)
with 1198910(119901) ge 0 and int1
01198910(119901)119889119901 = 1
For more detail see [14]
3 Sinc Interpolation
The goal of this section is to recall notations and definition ofthe sinc function that are used The sinc approximation for afunction 119891(119909) defined on the real line 119877 is given by
119891 (119909) asymp
119873
sum
119895=minus119873
119891 (119895ℎ) 119878 (119895 ℎ) (119909) (22)
where 119878(119895 ℎ) is sinc function defined by
119878 (119895 ℎ) (119909) =sin [(120587ℎ) (119909 minus 119895ℎ)][(120587ℎ) (119909 minus 119895ℎ)]
(23)
And the step size ℎ is suitably chosen for a given positiveinteger 119899 = 2119873 + 1 Sinc for interpolation points 119909
119896= 119896ℎ
is given by
119878 (119895 ℎ) (119896ℎ) = 120575(0)
119895119896= 1 119896 = 119895
0 119896 = 119895(24)
Assuming that 119891(119905) is analytic on the real line and decaysexponentially on the real line it has been shown that the errorof the approximation decays exponentially with increasing119873 The approximation may be extended to approximate119891(119905) on the interval [0 1] by selection of an appropriatetransfer function to transform the interval onto the real lineand impose the exponential decay We denote such variabletransformation 120591 = 120601(119905) and inverse transformation 119905 =120595(120591) such that 120601(0) = minusinfin and 120601(1) = infin We may writethe sinc approximation employing the transformation for thefunction 119891(119905) to be
119891 (119909) asymp
119873
sum
119895=minus119873
119891 (120595 (119895ℎ)) 119878 (119895 ℎ) (119909) (120601 (119905)) (25)
where the mesh size ℎ represents the separation between sincpoints on the 120591 isin (minusinfininfin) domain In order to have the
4 Journal of Computational Engineering
sinc approximation on a finite interval (0 1) conformal mapis employed as follows
120601 (119911) = ln( 1199111 minus 119911
) (26)
This map carries the eye-shaped complex domain
119863119864= 119911 = 119909 + 119894119910
1003816100381610038161003816100381610038161003816arg( 119911
1 minus 119911)
1003816100381610038161003816100381610038161003816lt 119889 le
120587
2 (27)
onto the infinite strip
119863119904= 119908 = 119906 + 119894V |V| lt 119889 le
120587
2 (28)
For the sinc method the basic function on the interval (0 1)for 119911 isin 119863
119864is derived from the composite translated sinc
functions
119878119895(119911) = 119904 (119895 ℎ) 119900120601 (119911) = Sinc(
120601 (119911) minus 119895ℎ
ℎ) (29)
Exhibiting kroneckor delta behavior on the grid points
119909119896= 120601
minus1(119896ℎ) =
119890119896ℎ
1 + 119890119896ℎ 119896 = plusmn1 plusmn2 (30)
Thus we may define the inverse images of the real line and ofthe evenly space nodes 119896ℎinfin
119896=minusinfinas
Γ = 120601minus1(119909) isin 119863
119864 minusinfin lt 119909 lt infin = (0 1) (31)
And quadrature formulas for 119891(119905) over [0 1] are
119891 (119909) asymp
119873
sum
119896=minus119873
119891 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
int
1
0
119891 (119909) 119889119909 asymp ℎ
119873
sum
119896=minus119873
119891 (119909119896)
1206011015840 (119909119896)
(32)
Definition 3 Let 119861(119863119864) be the class of functions 119865 which are
analytic in119863119864satisfy
int120595(119905+119871)
|119865 (119911) 119889119911| 997888rarr 0 119905 997888rarr plusmninfin (33)
where 119871 = 119894V |V| lt 119889 le 1205872 and on the boundary of 119863119864
(denoted by 120597119863119864) satisfying
119873(119865) = int120597119863119864
|119865 (119911) 119889119911| lt infin (34)
Interpolation for function in119861(119863119864) is defined in the following
theorem whose proof can be found in [15]
Theorem 4 If 1206011015840119865 isin 119861(119863119864) then for all 119909 isin Γ
1003816100381610038161003816100381610038161003816100381610038161003816
119865 (119909) minus
infin
sum
119896=minusinfin
119865 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
1003816100381610038161003816100381610038161003816100381610038161003816
le
119873 (1198651206011015840)
2120587119889 sinh (120587119889ℎ)
le
2119873 (1198651206011015840)
120587119889119890minus120587119889ℎ
(35)
Moreover if |119865(119909)| le 119862119890minus120572|120601(119909)| 119909 isin Γ for some positiveconstants 119862 and 120572 and if the selection ℎ = radic120587119889120572119873 le
2120587119889 ln 2 then1003816100381610038161003816100381610038161003816100381610038161003816
119865 (119909) minus
119873
sum
119896=minus119873
119865 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
1003816100381610038161003816100381610038161003816100381610038161003816
le 1198622radicN exp (minusradic120587119889120572119873) 119909 isin Γ
(36)
where 1198622depends only on 119865 119889 and 120572 The above expressions
show sinc interpolation on 119861(119863119864) converge exponentially
[17] We also require derivatives of composite sinc functionsevaluated at the nodes The expressions required for the presentdiscussion are [25]
120575(0)
119896119895= [119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895= 1 119896 = 119895
0 119896 = 119895
120575(1)
119896119895=119889
119889120601[119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895=1
ℎ
0 119896 = 119895
(minus1)119895minus119896
119895 minus 119896119896 = 119895
120575(2)
119896119895=1198892
1198891206012[119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895=1
ℎ2
minus1205872
3119896 = 119895
minus2(minus1)119895minus119896
(119895 minus 119896)2119896 = 119895
(37)
4 Collocation Method
Let 119868ℎ= 119905
119899 0 = 119905
0lt 119905
1lt sdot sdot sdot lt 119905
119873= 119879 be a given
mesh (not necessarily uniform) on 119868 and set 120590119899= (119905
119899 119905119899+1]
120590119899= [119905
119899 t119899+1] with ℎ
119899= 119905
119899+1minus 119905
119899(119899 = 0 1 119873 minus 1) The
quantity ℎ = maxℎ119899 0 le 119899 le 119873 minus 1 will be called the
diameter of the mesh 119868ℎ
Definition 5 Suppose that 119868ℎis a given partition on 119868 The
piecewise polynomials space 119878(119889)120583(119868ℎ) with 120583 ge 0 minus1 le 119889 le 120583
is defined by
119878(119889)
120583(119868ℎ) = 119902 (119905) isin 119862
119889[119868 119877] 119902|120590119899
isin 120587120583 0 le 119899 le 119873 minus 1
(38)
Here 120590119899= (119905
119899 119905119899+1] and 120587
120583denote the space of
polynomials of degree not exceeding 120583 and it is easy to seethat 119878(119889)
120583(119868ℎ)
119878(119889)
120583(119868ℎ) = 119873 (120583 minus 119889) + 119889 + 1 (39)
The collocation solution is determined by 119906ℎthat satisfies the
given equation on a given suitable finite subset119883ℎof 119868 where
119883ℎcontains the collocation points
119883ℎ= 119905
119899+ 119888
119894ℎ119899 0 le 119888
1le sdot sdot sdot le 119888
119898le 1 0 le 119899 le 119873 minus 1
(40)
is determined by the points of the partition 119868ℎand the given
collocation parameters 119888119894 isin [0 1] The collocation solution
119906ℎisin 119878
(0)
119898(119868ℎ) for119910 (119905) = 119891 (119905 119910 (119905)) 119910 (0) = 119910
0 (41)
Journal of Computational Engineering 5
is defined by the collocation equation
ℎ(119905) = 119891 (119905 119906
ℎ(119905)) 119905 isin 119883
ℎ 119906
ℎ(0) = 119910
0 (42)
It will be convenient (and natural) to work with the localLagrange basis representations of 119906
ℎ These polynomials in
120590119899can be written as
119871119895(119911) = Π
119898
119896 =119895
(119911 minus 119888119896)
(119888119895minus 119888
119896)
119911 isin [0 1] 119895 = 1 119898 (43)
where 119871119895(119911) belong to 120587
119898minus1 Also we have
119906ℎ(119905119899+ Vℎ
119899) =
119898
sum
119895=1
119871119895(V) 119884
119899119895 V isin (0 1]
119884119899119895= 119906
ℎ(119905119899+ 119888
119895ℎ119899)
(44)
From (44) we can obtain the local representation of 119906ℎisin
119878(0)
119898(119868ℎ) on 120590
119899 hence we can achieve that
1199061015840
ℎ(119905119899+ Vℎ
119899) =1
ℎ119899
119898
sum
119895=1
1198711015840
119895(V) 119884
119899119895 (45)
The unknown approximations 119884119899119894(119894 = 1 119898) in (44) are
defined by the solution of a system of (generally nonlinear)algebraic equations obtained by setting 119905 = 119905
119899119894= 119905
119899+ 119888
119894ℎ119899
in the collocation equation (42) and employing the localrepresentation (44) This system is
1
ℎ119899
119898
sum
119895=1
1198711015840
119895(119888119894) 119884
119899119895= 119891 (119905
119899119894 119884
119899119894) 119894 = 1 119898 (46)
It corresponds to (44) with V = 1
119910119899+1= 119906
ℎ(119905119899+ ℎ
119899) =
119898
sum
119895=1
119871119895(1) 119884
119899119895(119899 = 0 1 119873 minus 1)
(47)
I present the result on global convergence for the linearinitial-value problem
119910 (119905) = 119886 (119905) 119910 (119905) + 119892 (119905) 119905 isin 119868 119910 (0) = 1199100 (48)
Theorem 6 Assume that
(a) the given functions in (48) satisfy 119886 119892 isin 119862119898(119868)
(b) ℎ gt 0 is such that for any ℎ isin (0 ℎ) each of the linearsystems of method has a unique solution
Then the estimates1003817100381710038171003817119910 minus 119906ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906ℎ (119905)1003816100381610038161003816 le 1198620
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (49)
1003817100381710038171003817119910 minus
ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906
ℎ(119905)1003816100381610038161003816 le 1198621
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (50)
See [34]
5 Construction of the Method
Let 0 = 1199050lt 119905
1lt sdot sdot sdot lt 119905
119873= 119879 is a partition of [0 119879]
In every interval 120590119899= (119905
119899 119905119899+1] we assume that 119891(119905 119901) 119901 isin
[0 1] solution of one dimensional mixed strategy model isapproximated by the finite expansion of sinc basis functionand Lagrange polynomials
119891 (119905 119901) ≃
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905) (51)
whereΨ119895(119905) is a polynomial of degree119898 Also initial value is
according to
119891 (119905119899 119901) = 119891
119905119899(119901) (52)
If we replace approximation (51) in (21) we have
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
1015840
119895(119905)
=
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905)
times (1205721198721(119891 (119905 p)) + 120573) (119901 minus119872
1(119891 (119905 119901)))
(53)
where1198721(119891) is taken by
1198721(119891 (119905 119901)) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896int
1
0
119901 sdot 119878 (119896 ℎ) 119900120601 (119901)Ψ119895(119905) 119889119901
(54)
By substituting collocation points for 119905 and 119901 and usingquadrature rule (32) a nonlinear system is given
After solving this system we calculate 119888119895119896
and finally119891(119905 119901) in 120590
119899 and also 119891(119905 119901) at 119905
119899+1
119891 (119905119899+1 119901) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905119899+1) (55)
where 119891(119905119899+1 119901) is used as an initial value for next interval
120590119899+1
After119873 times solution is achieved
6 Numerical Examples
Prisonerrsquos DilemmaGameOne interesting example of a gameis given by the so-called Prisonerrsquos Dilemma game in whichthere are two players and two possible strategies The playershave two options cooperate or defect The payoff matrix isthe following
119860 = (119877 119878
119879 119875) (56)
If both players cooperate both obtain 119877 fitness units (rewardpayoff) if both defect each receives 119875 (punishment payoff)if one player cooperates and the other defects the cooperator
6 Journal of Computational Engineering
2
15
1
05
0 02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 1 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = 1
gets 119878 (suckers payoff) while the defector gets 119879 (temptationpayoff) The payoff values are ranked 119879 gt 119877 gt 119875 gt 119878 and2119877 gt 119879 + 119878 We know that cooperators are always dominatedby defectors
For the numerical tests we fix the following normalizedpayoff matrix
119860 = (1 0
119887 120598) (57)
with 119887 = 11 and 120598 = 0001 In this case we have 120572 = 1 minus119887 + 120598 lt 0 and 120573 = minus120598 lt 0 and so 120573120572 gt 0 This means thatstationary solutions are expected to be given by concentratedDirac masses For general perturbation we have that 119901 = 0 islinearly stable
We In order to conform the results above initial conditionis considered as below
(1)
1198910(119901) = 1 forall119901 isin [0 1] (58)
(2)
1198910(119901) = minus119901
2+2
3119901 + 1 forall119901 isin [0 1] (59)
(3)
1198910(119901) =
2 119901 isin [1
41
2] cup [
3
4 1]
0 elsewhere(60)
For implementation of proposedmethod I usedMaple15 andplotted the numerical results in Figures 1 2 and 3 Figure 1shows that the density119891 tends to concentrate at the point 119901 =0 to what we expected
0 02 04 06 08 1
p
20
18
16
14
12
10
08
06
04
02
t = 0
t = 100
t = 200
Figure 2 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = minus119901
2+ (23)119901 + 1
3
2
1
0
02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 3 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) =
2 119901isin[1412]cup[341]
0 elsewhere
7 Conclusion
In this paper the collocation method with sinc and Lagrangepolynomials are employed to construct an approximation tothe solution of continuous mixed strategy It is found thatthe results of the present works agree well with trapezoidalrule Properties of the sinc procedure are utilized to reduce
Journal of Computational Engineering 7
the computation of this integrodifferential to some nonlin-ear equations There are several advantages over classicalmethods to using approximations based on sinc numericalmethods First unlike most numerical techniques it is nowwell-established that they are characterized by exponentiallydecaying errors Secondly approximation by sinc functionshandles singularities in the problem Thirdly due to theirrapid convergence sinc numerical methods do not sufferfrom the common instability problems associated with othernumerical methods Also in this case the advantages of col-location method are used The method is applied to testexamples to illustrate the accuracy and implementation of themethod
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] J W Weibull Evolutionary GameTheory The MIT Press 1995[2] D Fudenberg and D LevineTheTheory o f Learning in Games
MIT Press 1998[3] L Samuelson Evolutionary Games and Equilibrium Selection
MIT Press 1998[4] J Hofbauer and K Sigmund Evolutionary Games and Popula-
tion Dynamics Cambridge University Press Cambridge UK1998
[5] H Gintis Game Theory Evolving Princeton University Press2000
[6] R Cressman Evolutionary Dynamics and Extensive FormGames MIT Press 2003
[7] Th Vincent and J Brown Evolutionary Game Theory Natu-ral Selection and Darwinian Dynamics Cambridge UniversityPress Cambridge UK 2005
[8] J Hofbauer and K Sigmund ldquoEvolutionary game dynamicsrdquoBulletin of the AmericanMathematical Society vol 40 no 4 pp479ndash519 2003
[9] I M Bomze ldquoDynamical aspects of evolutionary stabilityrdquoMonatshefte furMathematik vol 110 no 3-4 pp 189ndash206 1990
[10] R Cressman ldquoStability of the replicator equation with continu-ous strategy spacerdquoMathematical Social Sciences vol 50 no 2pp 127ndash147 2005
[11] J Hofbauer J Oechssler and F Riedel ldquoBrown-von Neumann-NASh dynamics the continuous strategy caserdquo Games andEconomic Behavior vol 65 no 2 pp 406ndash429 2009
[12] T W L Norman ldquoDynamically stable sets in infinite strategyspacesrdquo Games and Economic Behavior vol 62 no 2 pp 610ndash627 2008
[13] J Oechssler and F Riedel ldquoEvolutionary dynamics on infinitestrategy spacesrdquoEconomicTheory vol 17 no 1 pp 141ndash162 2001
[14] A Boccabella R Natalini and L Pareschi ldquoOn a continuousmixed strategies model for evolutionary game theoryrdquo Kineticand Related Models vol 4 no 1 pp 187ndash213 2011
[15] F Stenger Numerical Methods Based on Sinc and AnalyticFunctions Springer New York NY USA 1993
[16] J Lund and K L Bowers Sinc Methods for Quadrature andDifferential Equations SIAM Philadelphia Pennsylvania USA1992
[17] D F Winter K L Bowers and J Lund ldquoWind-driven currentsin a sea with a variable eddy viscosity calculated via a Sinc-Galerkin techniquerdquo International Journal for Numerical Meth-ods in Fluids vol 33 no 7 pp 1041ndash1073 2000
[18] B Bialecki ldquoSinc-collocation methods for two-point boundaryvalue problemsrdquo IMA Journal of Numerical Analysis vol 11 no3 pp 357ndash375 1991
[19] K Parand and A Pirkhedri ldquoSinc-Collocationmethod for solv-ing astrophysics equationsrdquo New Astronomy vol 15 no 6 pp533ndash537 2010
[20] K Parand M Dehghan and A Pirkhedri ldquoSinc-collocationmethod for solving the Blasius equationrdquo Physics Letters A vol373 no 44 pp 4060ndash4065 2009
[21] K Parand Z Delafkar N Pakniat A Pirkhedri andM K HajildquoCollocation method using sinc and rational Legendre func-tions for solving Volterrarsquos population modelrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 16 no 4pp 1811ndash1819 2011
[22] A Saadatmandi M Razzaghi and M Dehghan ldquoSinc-collo-cation methods for the solution of Hallens integral equationrdquoJournal of Electromagnetic Waves and Applications vol 19 no2 pp 245ndash256 2005
[23] A Saadatmandi and M Razzaghi ldquoThe numerical solution ofthird-order boundary value problems using sinc-collocationmethodrdquo Communications in Numerical Methods in Engineer-ing vol 23 no 7 pp 681ndash689 2007
[24] M Dehghan and A Saadatmandi ldquoThe numerical solution ofa nonlinear system of second-order boundary value problemsusing the sinc-collocation methodrdquo Mathematical and Com-puter Modelling vol 46 no 11-12 pp 1434ndash1441 2007
[25] M El-Gamel S H Behiry andHHashish ldquoNumerical methodfor the solution of special nonlinear fourth-order boundaryvalue problemsrdquo Applied Mathematics and Computation vol145 no 2-3 pp 717ndash734 2003
[26] P N Dinh Alain P H Quan and D D Trong ldquoSinc approx-imation of the heat distribution on the boundary of a two-dimensional finite slabrdquo Nonlinear Analysis Real World Appli-cations vol 9 no 3 pp 1103ndash1111 2008
[27] K Abdella X Yu and I Kucuk ldquoApplication of the Sincmethodto a dynamic elasto-plastic problemrdquo Journal of Computationaland Applied Mathematics vol 223 no 2 pp 626ndash645 2009
[28] J Lund and C R Vogel ldquoA fully-Galerkin method for thenumerical solution of an inverse problem in a parabolic partialdifferential equationrdquo Inverse Problems vol 6 no 2 pp 205ndash2171990
[29] A Shidfar R Zolfaghari and J Damirchi ldquoApplication of sinc-collocation method for solving an inverse problemrdquo Journal ofComputational and Applied Mathematics vol 233 no 2 pp545ndash554 2009
[30] J Rashidinia and M Zarebnia ldquoThe numerical solution ofintegro-differential equation by means of the sinc methodrdquoAppliedMathematics and Computation vol 188 no 2 pp 1124ndash1130 2007
[31] M El-Gamel and A I Zayed ldquoSinc-Galerkin method for solv-ing nonlinear boundary-value problemsrdquo Computers amp Mathe-matics with Applications vol 48 no 9 pp 1285ndash1298 2004
[32] A Saadatmandi and M Dehghan ldquoThe use of sinc-collocationmethod for solving multi-point boundary value problemsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 17 no 2 pp 593ndash601 2012
8 Journal of Computational Engineering
[33] A Mohsen and M El-Gamel ldquoOn the numerical solution oflinear and nonlinear Volterra integral and integro-differentialequationsrdquo Applied Mathematics and Computation vol 217 no7 pp 3330ndash3337 2010
[34] H Brunner Collocation Methods for Volterra Integral and Re-lated Functional Differential Equations Cambridge UniversityPress 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Journal of Computational Engineering
sinc approximation on a finite interval (0 1) conformal mapis employed as follows
120601 (119911) = ln( 1199111 minus 119911
) (26)
This map carries the eye-shaped complex domain
119863119864= 119911 = 119909 + 119894119910
1003816100381610038161003816100381610038161003816arg( 119911
1 minus 119911)
1003816100381610038161003816100381610038161003816lt 119889 le
120587
2 (27)
onto the infinite strip
119863119904= 119908 = 119906 + 119894V |V| lt 119889 le
120587
2 (28)
For the sinc method the basic function on the interval (0 1)for 119911 isin 119863
119864is derived from the composite translated sinc
functions
119878119895(119911) = 119904 (119895 ℎ) 119900120601 (119911) = Sinc(
120601 (119911) minus 119895ℎ
ℎ) (29)
Exhibiting kroneckor delta behavior on the grid points
119909119896= 120601
minus1(119896ℎ) =
119890119896ℎ
1 + 119890119896ℎ 119896 = plusmn1 plusmn2 (30)
Thus we may define the inverse images of the real line and ofthe evenly space nodes 119896ℎinfin
119896=minusinfinas
Γ = 120601minus1(119909) isin 119863
119864 minusinfin lt 119909 lt infin = (0 1) (31)
And quadrature formulas for 119891(119905) over [0 1] are
119891 (119909) asymp
119873
sum
119896=minus119873
119891 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
int
1
0
119891 (119909) 119889119909 asymp ℎ
119873
sum
119896=minus119873
119891 (119909119896)
1206011015840 (119909119896)
(32)
Definition 3 Let 119861(119863119864) be the class of functions 119865 which are
analytic in119863119864satisfy
int120595(119905+119871)
|119865 (119911) 119889119911| 997888rarr 0 119905 997888rarr plusmninfin (33)
where 119871 = 119894V |V| lt 119889 le 1205872 and on the boundary of 119863119864
(denoted by 120597119863119864) satisfying
119873(119865) = int120597119863119864
|119865 (119911) 119889119911| lt infin (34)
Interpolation for function in119861(119863119864) is defined in the following
theorem whose proof can be found in [15]
Theorem 4 If 1206011015840119865 isin 119861(119863119864) then for all 119909 isin Γ
1003816100381610038161003816100381610038161003816100381610038161003816
119865 (119909) minus
infin
sum
119896=minusinfin
119865 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
1003816100381610038161003816100381610038161003816100381610038161003816
le
119873 (1198651206011015840)
2120587119889 sinh (120587119889ℎ)
le
2119873 (1198651206011015840)
120587119889119890minus120587119889ℎ
(35)
Moreover if |119865(119909)| le 119862119890minus120572|120601(119909)| 119909 isin Γ for some positiveconstants 119862 and 120572 and if the selection ℎ = radic120587119889120572119873 le
2120587119889 ln 2 then1003816100381610038161003816100381610038161003816100381610038161003816
119865 (119909) minus
119873
sum
119896=minus119873
119865 (119909119896) 119878 (119896 ℎ) 119900120601 (119909)
1003816100381610038161003816100381610038161003816100381610038161003816
le 1198622radicN exp (minusradic120587119889120572119873) 119909 isin Γ
(36)
where 1198622depends only on 119865 119889 and 120572 The above expressions
show sinc interpolation on 119861(119863119864) converge exponentially
[17] We also require derivatives of composite sinc functionsevaluated at the nodes The expressions required for the presentdiscussion are [25]
120575(0)
119896119895= [119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895= 1 119896 = 119895
0 119896 = 119895
120575(1)
119896119895=119889
119889120601[119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895=1
ℎ
0 119896 = 119895
(minus1)119895minus119896
119895 minus 119896119896 = 119895
120575(2)
119896119895=1198892
1198891206012[119878 (119896 ℎ) 119900120601 (119909)]
119909=119909119895=1
ℎ2
minus1205872
3119896 = 119895
minus2(minus1)119895minus119896
(119895 minus 119896)2119896 = 119895
(37)
4 Collocation Method
Let 119868ℎ= 119905
119899 0 = 119905
0lt 119905
1lt sdot sdot sdot lt 119905
119873= 119879 be a given
mesh (not necessarily uniform) on 119868 and set 120590119899= (119905
119899 119905119899+1]
120590119899= [119905
119899 t119899+1] with ℎ
119899= 119905
119899+1minus 119905
119899(119899 = 0 1 119873 minus 1) The
quantity ℎ = maxℎ119899 0 le 119899 le 119873 minus 1 will be called the
diameter of the mesh 119868ℎ
Definition 5 Suppose that 119868ℎis a given partition on 119868 The
piecewise polynomials space 119878(119889)120583(119868ℎ) with 120583 ge 0 minus1 le 119889 le 120583
is defined by
119878(119889)
120583(119868ℎ) = 119902 (119905) isin 119862
119889[119868 119877] 119902|120590119899
isin 120587120583 0 le 119899 le 119873 minus 1
(38)
Here 120590119899= (119905
119899 119905119899+1] and 120587
120583denote the space of
polynomials of degree not exceeding 120583 and it is easy to seethat 119878(119889)
120583(119868ℎ)
119878(119889)
120583(119868ℎ) = 119873 (120583 minus 119889) + 119889 + 1 (39)
The collocation solution is determined by 119906ℎthat satisfies the
given equation on a given suitable finite subset119883ℎof 119868 where
119883ℎcontains the collocation points
119883ℎ= 119905
119899+ 119888
119894ℎ119899 0 le 119888
1le sdot sdot sdot le 119888
119898le 1 0 le 119899 le 119873 minus 1
(40)
is determined by the points of the partition 119868ℎand the given
collocation parameters 119888119894 isin [0 1] The collocation solution
119906ℎisin 119878
(0)
119898(119868ℎ) for119910 (119905) = 119891 (119905 119910 (119905)) 119910 (0) = 119910
0 (41)
Journal of Computational Engineering 5
is defined by the collocation equation
ℎ(119905) = 119891 (119905 119906
ℎ(119905)) 119905 isin 119883
ℎ 119906
ℎ(0) = 119910
0 (42)
It will be convenient (and natural) to work with the localLagrange basis representations of 119906
ℎ These polynomials in
120590119899can be written as
119871119895(119911) = Π
119898
119896 =119895
(119911 minus 119888119896)
(119888119895minus 119888
119896)
119911 isin [0 1] 119895 = 1 119898 (43)
where 119871119895(119911) belong to 120587
119898minus1 Also we have
119906ℎ(119905119899+ Vℎ
119899) =
119898
sum
119895=1
119871119895(V) 119884
119899119895 V isin (0 1]
119884119899119895= 119906
ℎ(119905119899+ 119888
119895ℎ119899)
(44)
From (44) we can obtain the local representation of 119906ℎisin
119878(0)
119898(119868ℎ) on 120590
119899 hence we can achieve that
1199061015840
ℎ(119905119899+ Vℎ
119899) =1
ℎ119899
119898
sum
119895=1
1198711015840
119895(V) 119884
119899119895 (45)
The unknown approximations 119884119899119894(119894 = 1 119898) in (44) are
defined by the solution of a system of (generally nonlinear)algebraic equations obtained by setting 119905 = 119905
119899119894= 119905
119899+ 119888
119894ℎ119899
in the collocation equation (42) and employing the localrepresentation (44) This system is
1
ℎ119899
119898
sum
119895=1
1198711015840
119895(119888119894) 119884
119899119895= 119891 (119905
119899119894 119884
119899119894) 119894 = 1 119898 (46)
It corresponds to (44) with V = 1
119910119899+1= 119906
ℎ(119905119899+ ℎ
119899) =
119898
sum
119895=1
119871119895(1) 119884
119899119895(119899 = 0 1 119873 minus 1)
(47)
I present the result on global convergence for the linearinitial-value problem
119910 (119905) = 119886 (119905) 119910 (119905) + 119892 (119905) 119905 isin 119868 119910 (0) = 1199100 (48)
Theorem 6 Assume that
(a) the given functions in (48) satisfy 119886 119892 isin 119862119898(119868)
(b) ℎ gt 0 is such that for any ℎ isin (0 ℎ) each of the linearsystems of method has a unique solution
Then the estimates1003817100381710038171003817119910 minus 119906ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906ℎ (119905)1003816100381610038161003816 le 1198620
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (49)
1003817100381710038171003817119910 minus
ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906
ℎ(119905)1003816100381610038161003816 le 1198621
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (50)
See [34]
5 Construction of the Method
Let 0 = 1199050lt 119905
1lt sdot sdot sdot lt 119905
119873= 119879 is a partition of [0 119879]
In every interval 120590119899= (119905
119899 119905119899+1] we assume that 119891(119905 119901) 119901 isin
[0 1] solution of one dimensional mixed strategy model isapproximated by the finite expansion of sinc basis functionand Lagrange polynomials
119891 (119905 119901) ≃
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905) (51)
whereΨ119895(119905) is a polynomial of degree119898 Also initial value is
according to
119891 (119905119899 119901) = 119891
119905119899(119901) (52)
If we replace approximation (51) in (21) we have
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
1015840
119895(119905)
=
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905)
times (1205721198721(119891 (119905 p)) + 120573) (119901 minus119872
1(119891 (119905 119901)))
(53)
where1198721(119891) is taken by
1198721(119891 (119905 119901)) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896int
1
0
119901 sdot 119878 (119896 ℎ) 119900120601 (119901)Ψ119895(119905) 119889119901
(54)
By substituting collocation points for 119905 and 119901 and usingquadrature rule (32) a nonlinear system is given
After solving this system we calculate 119888119895119896
and finally119891(119905 119901) in 120590
119899 and also 119891(119905 119901) at 119905
119899+1
119891 (119905119899+1 119901) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905119899+1) (55)
where 119891(119905119899+1 119901) is used as an initial value for next interval
120590119899+1
After119873 times solution is achieved
6 Numerical Examples
Prisonerrsquos DilemmaGameOne interesting example of a gameis given by the so-called Prisonerrsquos Dilemma game in whichthere are two players and two possible strategies The playershave two options cooperate or defect The payoff matrix isthe following
119860 = (119877 119878
119879 119875) (56)
If both players cooperate both obtain 119877 fitness units (rewardpayoff) if both defect each receives 119875 (punishment payoff)if one player cooperates and the other defects the cooperator
6 Journal of Computational Engineering
2
15
1
05
0 02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 1 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = 1
gets 119878 (suckers payoff) while the defector gets 119879 (temptationpayoff) The payoff values are ranked 119879 gt 119877 gt 119875 gt 119878 and2119877 gt 119879 + 119878 We know that cooperators are always dominatedby defectors
For the numerical tests we fix the following normalizedpayoff matrix
119860 = (1 0
119887 120598) (57)
with 119887 = 11 and 120598 = 0001 In this case we have 120572 = 1 minus119887 + 120598 lt 0 and 120573 = minus120598 lt 0 and so 120573120572 gt 0 This means thatstationary solutions are expected to be given by concentratedDirac masses For general perturbation we have that 119901 = 0 islinearly stable
We In order to conform the results above initial conditionis considered as below
(1)
1198910(119901) = 1 forall119901 isin [0 1] (58)
(2)
1198910(119901) = minus119901
2+2
3119901 + 1 forall119901 isin [0 1] (59)
(3)
1198910(119901) =
2 119901 isin [1
41
2] cup [
3
4 1]
0 elsewhere(60)
For implementation of proposedmethod I usedMaple15 andplotted the numerical results in Figures 1 2 and 3 Figure 1shows that the density119891 tends to concentrate at the point 119901 =0 to what we expected
0 02 04 06 08 1
p
20
18
16
14
12
10
08
06
04
02
t = 0
t = 100
t = 200
Figure 2 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = minus119901
2+ (23)119901 + 1
3
2
1
0
02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 3 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) =
2 119901isin[1412]cup[341]
0 elsewhere
7 Conclusion
In this paper the collocation method with sinc and Lagrangepolynomials are employed to construct an approximation tothe solution of continuous mixed strategy It is found thatthe results of the present works agree well with trapezoidalrule Properties of the sinc procedure are utilized to reduce
Journal of Computational Engineering 7
the computation of this integrodifferential to some nonlin-ear equations There are several advantages over classicalmethods to using approximations based on sinc numericalmethods First unlike most numerical techniques it is nowwell-established that they are characterized by exponentiallydecaying errors Secondly approximation by sinc functionshandles singularities in the problem Thirdly due to theirrapid convergence sinc numerical methods do not sufferfrom the common instability problems associated with othernumerical methods Also in this case the advantages of col-location method are used The method is applied to testexamples to illustrate the accuracy and implementation of themethod
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] J W Weibull Evolutionary GameTheory The MIT Press 1995[2] D Fudenberg and D LevineTheTheory o f Learning in Games
MIT Press 1998[3] L Samuelson Evolutionary Games and Equilibrium Selection
MIT Press 1998[4] J Hofbauer and K Sigmund Evolutionary Games and Popula-
tion Dynamics Cambridge University Press Cambridge UK1998
[5] H Gintis Game Theory Evolving Princeton University Press2000
[6] R Cressman Evolutionary Dynamics and Extensive FormGames MIT Press 2003
[7] Th Vincent and J Brown Evolutionary Game Theory Natu-ral Selection and Darwinian Dynamics Cambridge UniversityPress Cambridge UK 2005
[8] J Hofbauer and K Sigmund ldquoEvolutionary game dynamicsrdquoBulletin of the AmericanMathematical Society vol 40 no 4 pp479ndash519 2003
[9] I M Bomze ldquoDynamical aspects of evolutionary stabilityrdquoMonatshefte furMathematik vol 110 no 3-4 pp 189ndash206 1990
[10] R Cressman ldquoStability of the replicator equation with continu-ous strategy spacerdquoMathematical Social Sciences vol 50 no 2pp 127ndash147 2005
[11] J Hofbauer J Oechssler and F Riedel ldquoBrown-von Neumann-NASh dynamics the continuous strategy caserdquo Games andEconomic Behavior vol 65 no 2 pp 406ndash429 2009
[12] T W L Norman ldquoDynamically stable sets in infinite strategyspacesrdquo Games and Economic Behavior vol 62 no 2 pp 610ndash627 2008
[13] J Oechssler and F Riedel ldquoEvolutionary dynamics on infinitestrategy spacesrdquoEconomicTheory vol 17 no 1 pp 141ndash162 2001
[14] A Boccabella R Natalini and L Pareschi ldquoOn a continuousmixed strategies model for evolutionary game theoryrdquo Kineticand Related Models vol 4 no 1 pp 187ndash213 2011
[15] F Stenger Numerical Methods Based on Sinc and AnalyticFunctions Springer New York NY USA 1993
[16] J Lund and K L Bowers Sinc Methods for Quadrature andDifferential Equations SIAM Philadelphia Pennsylvania USA1992
[17] D F Winter K L Bowers and J Lund ldquoWind-driven currentsin a sea with a variable eddy viscosity calculated via a Sinc-Galerkin techniquerdquo International Journal for Numerical Meth-ods in Fluids vol 33 no 7 pp 1041ndash1073 2000
[18] B Bialecki ldquoSinc-collocation methods for two-point boundaryvalue problemsrdquo IMA Journal of Numerical Analysis vol 11 no3 pp 357ndash375 1991
[19] K Parand and A Pirkhedri ldquoSinc-Collocationmethod for solv-ing astrophysics equationsrdquo New Astronomy vol 15 no 6 pp533ndash537 2010
[20] K Parand M Dehghan and A Pirkhedri ldquoSinc-collocationmethod for solving the Blasius equationrdquo Physics Letters A vol373 no 44 pp 4060ndash4065 2009
[21] K Parand Z Delafkar N Pakniat A Pirkhedri andM K HajildquoCollocation method using sinc and rational Legendre func-tions for solving Volterrarsquos population modelrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 16 no 4pp 1811ndash1819 2011
[22] A Saadatmandi M Razzaghi and M Dehghan ldquoSinc-collo-cation methods for the solution of Hallens integral equationrdquoJournal of Electromagnetic Waves and Applications vol 19 no2 pp 245ndash256 2005
[23] A Saadatmandi and M Razzaghi ldquoThe numerical solution ofthird-order boundary value problems using sinc-collocationmethodrdquo Communications in Numerical Methods in Engineer-ing vol 23 no 7 pp 681ndash689 2007
[24] M Dehghan and A Saadatmandi ldquoThe numerical solution ofa nonlinear system of second-order boundary value problemsusing the sinc-collocation methodrdquo Mathematical and Com-puter Modelling vol 46 no 11-12 pp 1434ndash1441 2007
[25] M El-Gamel S H Behiry andHHashish ldquoNumerical methodfor the solution of special nonlinear fourth-order boundaryvalue problemsrdquo Applied Mathematics and Computation vol145 no 2-3 pp 717ndash734 2003
[26] P N Dinh Alain P H Quan and D D Trong ldquoSinc approx-imation of the heat distribution on the boundary of a two-dimensional finite slabrdquo Nonlinear Analysis Real World Appli-cations vol 9 no 3 pp 1103ndash1111 2008
[27] K Abdella X Yu and I Kucuk ldquoApplication of the Sincmethodto a dynamic elasto-plastic problemrdquo Journal of Computationaland Applied Mathematics vol 223 no 2 pp 626ndash645 2009
[28] J Lund and C R Vogel ldquoA fully-Galerkin method for thenumerical solution of an inverse problem in a parabolic partialdifferential equationrdquo Inverse Problems vol 6 no 2 pp 205ndash2171990
[29] A Shidfar R Zolfaghari and J Damirchi ldquoApplication of sinc-collocation method for solving an inverse problemrdquo Journal ofComputational and Applied Mathematics vol 233 no 2 pp545ndash554 2009
[30] J Rashidinia and M Zarebnia ldquoThe numerical solution ofintegro-differential equation by means of the sinc methodrdquoAppliedMathematics and Computation vol 188 no 2 pp 1124ndash1130 2007
[31] M El-Gamel and A I Zayed ldquoSinc-Galerkin method for solv-ing nonlinear boundary-value problemsrdquo Computers amp Mathe-matics with Applications vol 48 no 9 pp 1285ndash1298 2004
[32] A Saadatmandi and M Dehghan ldquoThe use of sinc-collocationmethod for solving multi-point boundary value problemsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 17 no 2 pp 593ndash601 2012
8 Journal of Computational Engineering
[33] A Mohsen and M El-Gamel ldquoOn the numerical solution oflinear and nonlinear Volterra integral and integro-differentialequationsrdquo Applied Mathematics and Computation vol 217 no7 pp 3330ndash3337 2010
[34] H Brunner Collocation Methods for Volterra Integral and Re-lated Functional Differential Equations Cambridge UniversityPress 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Computational Engineering 5
is defined by the collocation equation
ℎ(119905) = 119891 (119905 119906
ℎ(119905)) 119905 isin 119883
ℎ 119906
ℎ(0) = 119910
0 (42)
It will be convenient (and natural) to work with the localLagrange basis representations of 119906
ℎ These polynomials in
120590119899can be written as
119871119895(119911) = Π
119898
119896 =119895
(119911 minus 119888119896)
(119888119895minus 119888
119896)
119911 isin [0 1] 119895 = 1 119898 (43)
where 119871119895(119911) belong to 120587
119898minus1 Also we have
119906ℎ(119905119899+ Vℎ
119899) =
119898
sum
119895=1
119871119895(V) 119884
119899119895 V isin (0 1]
119884119899119895= 119906
ℎ(119905119899+ 119888
119895ℎ119899)
(44)
From (44) we can obtain the local representation of 119906ℎisin
119878(0)
119898(119868ℎ) on 120590
119899 hence we can achieve that
1199061015840
ℎ(119905119899+ Vℎ
119899) =1
ℎ119899
119898
sum
119895=1
1198711015840
119895(V) 119884
119899119895 (45)
The unknown approximations 119884119899119894(119894 = 1 119898) in (44) are
defined by the solution of a system of (generally nonlinear)algebraic equations obtained by setting 119905 = 119905
119899119894= 119905
119899+ 119888
119894ℎ119899
in the collocation equation (42) and employing the localrepresentation (44) This system is
1
ℎ119899
119898
sum
119895=1
1198711015840
119895(119888119894) 119884
119899119895= 119891 (119905
119899119894 119884
119899119894) 119894 = 1 119898 (46)
It corresponds to (44) with V = 1
119910119899+1= 119906
ℎ(119905119899+ ℎ
119899) =
119898
sum
119895=1
119871119895(1) 119884
119899119895(119899 = 0 1 119873 minus 1)
(47)
I present the result on global convergence for the linearinitial-value problem
119910 (119905) = 119886 (119905) 119910 (119905) + 119892 (119905) 119905 isin 119868 119910 (0) = 1199100 (48)
Theorem 6 Assume that
(a) the given functions in (48) satisfy 119886 119892 isin 119862119898(119868)
(b) ℎ gt 0 is such that for any ℎ isin (0 ℎ) each of the linearsystems of method has a unique solution
Then the estimates1003817100381710038171003817119910 minus 119906ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906ℎ (119905)1003816100381610038161003816 le 1198620
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (49)
1003817100381710038171003817119910 minus
ℎ
1003817100381710038171003817infin= max
119905isin119868
1003816100381610038161003816119910 (119905) minus 119906
ℎ(119905)1003816100381610038161003816 le 1198621
10038171003817100381710038171003817119910(119898+1)10038171003817100381710038171003817infin
ℎ119898 (50)
See [34]
5 Construction of the Method
Let 0 = 1199050lt 119905
1lt sdot sdot sdot lt 119905
119873= 119879 is a partition of [0 119879]
In every interval 120590119899= (119905
119899 119905119899+1] we assume that 119891(119905 119901) 119901 isin
[0 1] solution of one dimensional mixed strategy model isapproximated by the finite expansion of sinc basis functionand Lagrange polynomials
119891 (119905 119901) ≃
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905) (51)
whereΨ119895(119905) is a polynomial of degree119898 Also initial value is
according to
119891 (119905119899 119901) = 119891
119905119899(119901) (52)
If we replace approximation (51) in (21) we have
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
1015840
119895(119905)
=
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905)
times (1205721198721(119891 (119905 p)) + 120573) (119901 minus119872
1(119891 (119905 119901)))
(53)
where1198721(119891) is taken by
1198721(119891 (119905 119901)) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896int
1
0
119901 sdot 119878 (119896 ℎ) 119900120601 (119901)Ψ119895(119905) 119889119901
(54)
By substituting collocation points for 119905 and 119901 and usingquadrature rule (32) a nonlinear system is given
After solving this system we calculate 119888119895119896
and finally119891(119905 119901) in 120590
119899 and also 119891(119905 119901) at 119905
119899+1
119891 (119905119899+1 119901) =
119898
sum
119895=0
119873
sum
119896=minus119873
119888119895119896119878 (119896 ℎ) 119900120601 (119901)Ψ
119895(119905119899+1) (55)
where 119891(119905119899+1 119901) is used as an initial value for next interval
120590119899+1
After119873 times solution is achieved
6 Numerical Examples
Prisonerrsquos DilemmaGameOne interesting example of a gameis given by the so-called Prisonerrsquos Dilemma game in whichthere are two players and two possible strategies The playershave two options cooperate or defect The payoff matrix isthe following
119860 = (119877 119878
119879 119875) (56)
If both players cooperate both obtain 119877 fitness units (rewardpayoff) if both defect each receives 119875 (punishment payoff)if one player cooperates and the other defects the cooperator
6 Journal of Computational Engineering
2
15
1
05
0 02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 1 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = 1
gets 119878 (suckers payoff) while the defector gets 119879 (temptationpayoff) The payoff values are ranked 119879 gt 119877 gt 119875 gt 119878 and2119877 gt 119879 + 119878 We know that cooperators are always dominatedby defectors
For the numerical tests we fix the following normalizedpayoff matrix
119860 = (1 0
119887 120598) (57)
with 119887 = 11 and 120598 = 0001 In this case we have 120572 = 1 minus119887 + 120598 lt 0 and 120573 = minus120598 lt 0 and so 120573120572 gt 0 This means thatstationary solutions are expected to be given by concentratedDirac masses For general perturbation we have that 119901 = 0 islinearly stable
We In order to conform the results above initial conditionis considered as below
(1)
1198910(119901) = 1 forall119901 isin [0 1] (58)
(2)
1198910(119901) = minus119901
2+2
3119901 + 1 forall119901 isin [0 1] (59)
(3)
1198910(119901) =
2 119901 isin [1
41
2] cup [
3
4 1]
0 elsewhere(60)
For implementation of proposedmethod I usedMaple15 andplotted the numerical results in Figures 1 2 and 3 Figure 1shows that the density119891 tends to concentrate at the point 119901 =0 to what we expected
0 02 04 06 08 1
p
20
18
16
14
12
10
08
06
04
02
t = 0
t = 100
t = 200
Figure 2 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = minus119901
2+ (23)119901 + 1
3
2
1
0
02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 3 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) =
2 119901isin[1412]cup[341]
0 elsewhere
7 Conclusion
In this paper the collocation method with sinc and Lagrangepolynomials are employed to construct an approximation tothe solution of continuous mixed strategy It is found thatthe results of the present works agree well with trapezoidalrule Properties of the sinc procedure are utilized to reduce
Journal of Computational Engineering 7
the computation of this integrodifferential to some nonlin-ear equations There are several advantages over classicalmethods to using approximations based on sinc numericalmethods First unlike most numerical techniques it is nowwell-established that they are characterized by exponentiallydecaying errors Secondly approximation by sinc functionshandles singularities in the problem Thirdly due to theirrapid convergence sinc numerical methods do not sufferfrom the common instability problems associated with othernumerical methods Also in this case the advantages of col-location method are used The method is applied to testexamples to illustrate the accuracy and implementation of themethod
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] J W Weibull Evolutionary GameTheory The MIT Press 1995[2] D Fudenberg and D LevineTheTheory o f Learning in Games
MIT Press 1998[3] L Samuelson Evolutionary Games and Equilibrium Selection
MIT Press 1998[4] J Hofbauer and K Sigmund Evolutionary Games and Popula-
tion Dynamics Cambridge University Press Cambridge UK1998
[5] H Gintis Game Theory Evolving Princeton University Press2000
[6] R Cressman Evolutionary Dynamics and Extensive FormGames MIT Press 2003
[7] Th Vincent and J Brown Evolutionary Game Theory Natu-ral Selection and Darwinian Dynamics Cambridge UniversityPress Cambridge UK 2005
[8] J Hofbauer and K Sigmund ldquoEvolutionary game dynamicsrdquoBulletin of the AmericanMathematical Society vol 40 no 4 pp479ndash519 2003
[9] I M Bomze ldquoDynamical aspects of evolutionary stabilityrdquoMonatshefte furMathematik vol 110 no 3-4 pp 189ndash206 1990
[10] R Cressman ldquoStability of the replicator equation with continu-ous strategy spacerdquoMathematical Social Sciences vol 50 no 2pp 127ndash147 2005
[11] J Hofbauer J Oechssler and F Riedel ldquoBrown-von Neumann-NASh dynamics the continuous strategy caserdquo Games andEconomic Behavior vol 65 no 2 pp 406ndash429 2009
[12] T W L Norman ldquoDynamically stable sets in infinite strategyspacesrdquo Games and Economic Behavior vol 62 no 2 pp 610ndash627 2008
[13] J Oechssler and F Riedel ldquoEvolutionary dynamics on infinitestrategy spacesrdquoEconomicTheory vol 17 no 1 pp 141ndash162 2001
[14] A Boccabella R Natalini and L Pareschi ldquoOn a continuousmixed strategies model for evolutionary game theoryrdquo Kineticand Related Models vol 4 no 1 pp 187ndash213 2011
[15] F Stenger Numerical Methods Based on Sinc and AnalyticFunctions Springer New York NY USA 1993
[16] J Lund and K L Bowers Sinc Methods for Quadrature andDifferential Equations SIAM Philadelphia Pennsylvania USA1992
[17] D F Winter K L Bowers and J Lund ldquoWind-driven currentsin a sea with a variable eddy viscosity calculated via a Sinc-Galerkin techniquerdquo International Journal for Numerical Meth-ods in Fluids vol 33 no 7 pp 1041ndash1073 2000
[18] B Bialecki ldquoSinc-collocation methods for two-point boundaryvalue problemsrdquo IMA Journal of Numerical Analysis vol 11 no3 pp 357ndash375 1991
[19] K Parand and A Pirkhedri ldquoSinc-Collocationmethod for solv-ing astrophysics equationsrdquo New Astronomy vol 15 no 6 pp533ndash537 2010
[20] K Parand M Dehghan and A Pirkhedri ldquoSinc-collocationmethod for solving the Blasius equationrdquo Physics Letters A vol373 no 44 pp 4060ndash4065 2009
[21] K Parand Z Delafkar N Pakniat A Pirkhedri andM K HajildquoCollocation method using sinc and rational Legendre func-tions for solving Volterrarsquos population modelrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 16 no 4pp 1811ndash1819 2011
[22] A Saadatmandi M Razzaghi and M Dehghan ldquoSinc-collo-cation methods for the solution of Hallens integral equationrdquoJournal of Electromagnetic Waves and Applications vol 19 no2 pp 245ndash256 2005
[23] A Saadatmandi and M Razzaghi ldquoThe numerical solution ofthird-order boundary value problems using sinc-collocationmethodrdquo Communications in Numerical Methods in Engineer-ing vol 23 no 7 pp 681ndash689 2007
[24] M Dehghan and A Saadatmandi ldquoThe numerical solution ofa nonlinear system of second-order boundary value problemsusing the sinc-collocation methodrdquo Mathematical and Com-puter Modelling vol 46 no 11-12 pp 1434ndash1441 2007
[25] M El-Gamel S H Behiry andHHashish ldquoNumerical methodfor the solution of special nonlinear fourth-order boundaryvalue problemsrdquo Applied Mathematics and Computation vol145 no 2-3 pp 717ndash734 2003
[26] P N Dinh Alain P H Quan and D D Trong ldquoSinc approx-imation of the heat distribution on the boundary of a two-dimensional finite slabrdquo Nonlinear Analysis Real World Appli-cations vol 9 no 3 pp 1103ndash1111 2008
[27] K Abdella X Yu and I Kucuk ldquoApplication of the Sincmethodto a dynamic elasto-plastic problemrdquo Journal of Computationaland Applied Mathematics vol 223 no 2 pp 626ndash645 2009
[28] J Lund and C R Vogel ldquoA fully-Galerkin method for thenumerical solution of an inverse problem in a parabolic partialdifferential equationrdquo Inverse Problems vol 6 no 2 pp 205ndash2171990
[29] A Shidfar R Zolfaghari and J Damirchi ldquoApplication of sinc-collocation method for solving an inverse problemrdquo Journal ofComputational and Applied Mathematics vol 233 no 2 pp545ndash554 2009
[30] J Rashidinia and M Zarebnia ldquoThe numerical solution ofintegro-differential equation by means of the sinc methodrdquoAppliedMathematics and Computation vol 188 no 2 pp 1124ndash1130 2007
[31] M El-Gamel and A I Zayed ldquoSinc-Galerkin method for solv-ing nonlinear boundary-value problemsrdquo Computers amp Mathe-matics with Applications vol 48 no 9 pp 1285ndash1298 2004
[32] A Saadatmandi and M Dehghan ldquoThe use of sinc-collocationmethod for solving multi-point boundary value problemsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 17 no 2 pp 593ndash601 2012
8 Journal of Computational Engineering
[33] A Mohsen and M El-Gamel ldquoOn the numerical solution oflinear and nonlinear Volterra integral and integro-differentialequationsrdquo Applied Mathematics and Computation vol 217 no7 pp 3330ndash3337 2010
[34] H Brunner Collocation Methods for Volterra Integral and Re-lated Functional Differential Equations Cambridge UniversityPress 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Journal of Computational Engineering
2
15
1
05
0 02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 1 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = 1
gets 119878 (suckers payoff) while the defector gets 119879 (temptationpayoff) The payoff values are ranked 119879 gt 119877 gt 119875 gt 119878 and2119877 gt 119879 + 119878 We know that cooperators are always dominatedby defectors
For the numerical tests we fix the following normalizedpayoff matrix
119860 = (1 0
119887 120598) (57)
with 119887 = 11 and 120598 = 0001 In this case we have 120572 = 1 minus119887 + 120598 lt 0 and 120573 = minus120598 lt 0 and so 120573120572 gt 0 This means thatstationary solutions are expected to be given by concentratedDirac masses For general perturbation we have that 119901 = 0 islinearly stable
We In order to conform the results above initial conditionis considered as below
(1)
1198910(119901) = 1 forall119901 isin [0 1] (58)
(2)
1198910(119901) = minus119901
2+2
3119901 + 1 forall119901 isin [0 1] (59)
(3)
1198910(119901) =
2 119901 isin [1
41
2] cup [
3
4 1]
0 elsewhere(60)
For implementation of proposedmethod I usedMaple15 andplotted the numerical results in Figures 1 2 and 3 Figure 1shows that the density119891 tends to concentrate at the point 119901 =0 to what we expected
0 02 04 06 08 1
p
20
18
16
14
12
10
08
06
04
02
t = 0
t = 100
t = 200
Figure 2 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) = minus119901
2+ (23)119901 + 1
3
2
1
0
02 04 06 08 1
p
t = 0
t = 100
t = 200
Figure 3 Plot of the evolution over time of 119891(119905 119901) for the PrisonerrsquosDilemma game with 119891
0(119901) =
2 119901isin[1412]cup[341]
0 elsewhere
7 Conclusion
In this paper the collocation method with sinc and Lagrangepolynomials are employed to construct an approximation tothe solution of continuous mixed strategy It is found thatthe results of the present works agree well with trapezoidalrule Properties of the sinc procedure are utilized to reduce
Journal of Computational Engineering 7
the computation of this integrodifferential to some nonlin-ear equations There are several advantages over classicalmethods to using approximations based on sinc numericalmethods First unlike most numerical techniques it is nowwell-established that they are characterized by exponentiallydecaying errors Secondly approximation by sinc functionshandles singularities in the problem Thirdly due to theirrapid convergence sinc numerical methods do not sufferfrom the common instability problems associated with othernumerical methods Also in this case the advantages of col-location method are used The method is applied to testexamples to illustrate the accuracy and implementation of themethod
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] J W Weibull Evolutionary GameTheory The MIT Press 1995[2] D Fudenberg and D LevineTheTheory o f Learning in Games
MIT Press 1998[3] L Samuelson Evolutionary Games and Equilibrium Selection
MIT Press 1998[4] J Hofbauer and K Sigmund Evolutionary Games and Popula-
tion Dynamics Cambridge University Press Cambridge UK1998
[5] H Gintis Game Theory Evolving Princeton University Press2000
[6] R Cressman Evolutionary Dynamics and Extensive FormGames MIT Press 2003
[7] Th Vincent and J Brown Evolutionary Game Theory Natu-ral Selection and Darwinian Dynamics Cambridge UniversityPress Cambridge UK 2005
[8] J Hofbauer and K Sigmund ldquoEvolutionary game dynamicsrdquoBulletin of the AmericanMathematical Society vol 40 no 4 pp479ndash519 2003
[9] I M Bomze ldquoDynamical aspects of evolutionary stabilityrdquoMonatshefte furMathematik vol 110 no 3-4 pp 189ndash206 1990
[10] R Cressman ldquoStability of the replicator equation with continu-ous strategy spacerdquoMathematical Social Sciences vol 50 no 2pp 127ndash147 2005
[11] J Hofbauer J Oechssler and F Riedel ldquoBrown-von Neumann-NASh dynamics the continuous strategy caserdquo Games andEconomic Behavior vol 65 no 2 pp 406ndash429 2009
[12] T W L Norman ldquoDynamically stable sets in infinite strategyspacesrdquo Games and Economic Behavior vol 62 no 2 pp 610ndash627 2008
[13] J Oechssler and F Riedel ldquoEvolutionary dynamics on infinitestrategy spacesrdquoEconomicTheory vol 17 no 1 pp 141ndash162 2001
[14] A Boccabella R Natalini and L Pareschi ldquoOn a continuousmixed strategies model for evolutionary game theoryrdquo Kineticand Related Models vol 4 no 1 pp 187ndash213 2011
[15] F Stenger Numerical Methods Based on Sinc and AnalyticFunctions Springer New York NY USA 1993
[16] J Lund and K L Bowers Sinc Methods for Quadrature andDifferential Equations SIAM Philadelphia Pennsylvania USA1992
[17] D F Winter K L Bowers and J Lund ldquoWind-driven currentsin a sea with a variable eddy viscosity calculated via a Sinc-Galerkin techniquerdquo International Journal for Numerical Meth-ods in Fluids vol 33 no 7 pp 1041ndash1073 2000
[18] B Bialecki ldquoSinc-collocation methods for two-point boundaryvalue problemsrdquo IMA Journal of Numerical Analysis vol 11 no3 pp 357ndash375 1991
[19] K Parand and A Pirkhedri ldquoSinc-Collocationmethod for solv-ing astrophysics equationsrdquo New Astronomy vol 15 no 6 pp533ndash537 2010
[20] K Parand M Dehghan and A Pirkhedri ldquoSinc-collocationmethod for solving the Blasius equationrdquo Physics Letters A vol373 no 44 pp 4060ndash4065 2009
[21] K Parand Z Delafkar N Pakniat A Pirkhedri andM K HajildquoCollocation method using sinc and rational Legendre func-tions for solving Volterrarsquos population modelrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 16 no 4pp 1811ndash1819 2011
[22] A Saadatmandi M Razzaghi and M Dehghan ldquoSinc-collo-cation methods for the solution of Hallens integral equationrdquoJournal of Electromagnetic Waves and Applications vol 19 no2 pp 245ndash256 2005
[23] A Saadatmandi and M Razzaghi ldquoThe numerical solution ofthird-order boundary value problems using sinc-collocationmethodrdquo Communications in Numerical Methods in Engineer-ing vol 23 no 7 pp 681ndash689 2007
[24] M Dehghan and A Saadatmandi ldquoThe numerical solution ofa nonlinear system of second-order boundary value problemsusing the sinc-collocation methodrdquo Mathematical and Com-puter Modelling vol 46 no 11-12 pp 1434ndash1441 2007
[25] M El-Gamel S H Behiry andHHashish ldquoNumerical methodfor the solution of special nonlinear fourth-order boundaryvalue problemsrdquo Applied Mathematics and Computation vol145 no 2-3 pp 717ndash734 2003
[26] P N Dinh Alain P H Quan and D D Trong ldquoSinc approx-imation of the heat distribution on the boundary of a two-dimensional finite slabrdquo Nonlinear Analysis Real World Appli-cations vol 9 no 3 pp 1103ndash1111 2008
[27] K Abdella X Yu and I Kucuk ldquoApplication of the Sincmethodto a dynamic elasto-plastic problemrdquo Journal of Computationaland Applied Mathematics vol 223 no 2 pp 626ndash645 2009
[28] J Lund and C R Vogel ldquoA fully-Galerkin method for thenumerical solution of an inverse problem in a parabolic partialdifferential equationrdquo Inverse Problems vol 6 no 2 pp 205ndash2171990
[29] A Shidfar R Zolfaghari and J Damirchi ldquoApplication of sinc-collocation method for solving an inverse problemrdquo Journal ofComputational and Applied Mathematics vol 233 no 2 pp545ndash554 2009
[30] J Rashidinia and M Zarebnia ldquoThe numerical solution ofintegro-differential equation by means of the sinc methodrdquoAppliedMathematics and Computation vol 188 no 2 pp 1124ndash1130 2007
[31] M El-Gamel and A I Zayed ldquoSinc-Galerkin method for solv-ing nonlinear boundary-value problemsrdquo Computers amp Mathe-matics with Applications vol 48 no 9 pp 1285ndash1298 2004
[32] A Saadatmandi and M Dehghan ldquoThe use of sinc-collocationmethod for solving multi-point boundary value problemsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 17 no 2 pp 593ndash601 2012
8 Journal of Computational Engineering
[33] A Mohsen and M El-Gamel ldquoOn the numerical solution oflinear and nonlinear Volterra integral and integro-differentialequationsrdquo Applied Mathematics and Computation vol 217 no7 pp 3330ndash3337 2010
[34] H Brunner Collocation Methods for Volterra Integral and Re-lated Functional Differential Equations Cambridge UniversityPress 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Computational Engineering 7
the computation of this integrodifferential to some nonlin-ear equations There are several advantages over classicalmethods to using approximations based on sinc numericalmethods First unlike most numerical techniques it is nowwell-established that they are characterized by exponentiallydecaying errors Secondly approximation by sinc functionshandles singularities in the problem Thirdly due to theirrapid convergence sinc numerical methods do not sufferfrom the common instability problems associated with othernumerical methods Also in this case the advantages of col-location method are used The method is applied to testexamples to illustrate the accuracy and implementation of themethod
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] J W Weibull Evolutionary GameTheory The MIT Press 1995[2] D Fudenberg and D LevineTheTheory o f Learning in Games
MIT Press 1998[3] L Samuelson Evolutionary Games and Equilibrium Selection
MIT Press 1998[4] J Hofbauer and K Sigmund Evolutionary Games and Popula-
tion Dynamics Cambridge University Press Cambridge UK1998
[5] H Gintis Game Theory Evolving Princeton University Press2000
[6] R Cressman Evolutionary Dynamics and Extensive FormGames MIT Press 2003
[7] Th Vincent and J Brown Evolutionary Game Theory Natu-ral Selection and Darwinian Dynamics Cambridge UniversityPress Cambridge UK 2005
[8] J Hofbauer and K Sigmund ldquoEvolutionary game dynamicsrdquoBulletin of the AmericanMathematical Society vol 40 no 4 pp479ndash519 2003
[9] I M Bomze ldquoDynamical aspects of evolutionary stabilityrdquoMonatshefte furMathematik vol 110 no 3-4 pp 189ndash206 1990
[10] R Cressman ldquoStability of the replicator equation with continu-ous strategy spacerdquoMathematical Social Sciences vol 50 no 2pp 127ndash147 2005
[11] J Hofbauer J Oechssler and F Riedel ldquoBrown-von Neumann-NASh dynamics the continuous strategy caserdquo Games andEconomic Behavior vol 65 no 2 pp 406ndash429 2009
[12] T W L Norman ldquoDynamically stable sets in infinite strategyspacesrdquo Games and Economic Behavior vol 62 no 2 pp 610ndash627 2008
[13] J Oechssler and F Riedel ldquoEvolutionary dynamics on infinitestrategy spacesrdquoEconomicTheory vol 17 no 1 pp 141ndash162 2001
[14] A Boccabella R Natalini and L Pareschi ldquoOn a continuousmixed strategies model for evolutionary game theoryrdquo Kineticand Related Models vol 4 no 1 pp 187ndash213 2011
[15] F Stenger Numerical Methods Based on Sinc and AnalyticFunctions Springer New York NY USA 1993
[16] J Lund and K L Bowers Sinc Methods for Quadrature andDifferential Equations SIAM Philadelphia Pennsylvania USA1992
[17] D F Winter K L Bowers and J Lund ldquoWind-driven currentsin a sea with a variable eddy viscosity calculated via a Sinc-Galerkin techniquerdquo International Journal for Numerical Meth-ods in Fluids vol 33 no 7 pp 1041ndash1073 2000
[18] B Bialecki ldquoSinc-collocation methods for two-point boundaryvalue problemsrdquo IMA Journal of Numerical Analysis vol 11 no3 pp 357ndash375 1991
[19] K Parand and A Pirkhedri ldquoSinc-Collocationmethod for solv-ing astrophysics equationsrdquo New Astronomy vol 15 no 6 pp533ndash537 2010
[20] K Parand M Dehghan and A Pirkhedri ldquoSinc-collocationmethod for solving the Blasius equationrdquo Physics Letters A vol373 no 44 pp 4060ndash4065 2009
[21] K Parand Z Delafkar N Pakniat A Pirkhedri andM K HajildquoCollocation method using sinc and rational Legendre func-tions for solving Volterrarsquos population modelrdquo Communicationsin Nonlinear Science and Numerical Simulation vol 16 no 4pp 1811ndash1819 2011
[22] A Saadatmandi M Razzaghi and M Dehghan ldquoSinc-collo-cation methods for the solution of Hallens integral equationrdquoJournal of Electromagnetic Waves and Applications vol 19 no2 pp 245ndash256 2005
[23] A Saadatmandi and M Razzaghi ldquoThe numerical solution ofthird-order boundary value problems using sinc-collocationmethodrdquo Communications in Numerical Methods in Engineer-ing vol 23 no 7 pp 681ndash689 2007
[24] M Dehghan and A Saadatmandi ldquoThe numerical solution ofa nonlinear system of second-order boundary value problemsusing the sinc-collocation methodrdquo Mathematical and Com-puter Modelling vol 46 no 11-12 pp 1434ndash1441 2007
[25] M El-Gamel S H Behiry andHHashish ldquoNumerical methodfor the solution of special nonlinear fourth-order boundaryvalue problemsrdquo Applied Mathematics and Computation vol145 no 2-3 pp 717ndash734 2003
[26] P N Dinh Alain P H Quan and D D Trong ldquoSinc approx-imation of the heat distribution on the boundary of a two-dimensional finite slabrdquo Nonlinear Analysis Real World Appli-cations vol 9 no 3 pp 1103ndash1111 2008
[27] K Abdella X Yu and I Kucuk ldquoApplication of the Sincmethodto a dynamic elasto-plastic problemrdquo Journal of Computationaland Applied Mathematics vol 223 no 2 pp 626ndash645 2009
[28] J Lund and C R Vogel ldquoA fully-Galerkin method for thenumerical solution of an inverse problem in a parabolic partialdifferential equationrdquo Inverse Problems vol 6 no 2 pp 205ndash2171990
[29] A Shidfar R Zolfaghari and J Damirchi ldquoApplication of sinc-collocation method for solving an inverse problemrdquo Journal ofComputational and Applied Mathematics vol 233 no 2 pp545ndash554 2009
[30] J Rashidinia and M Zarebnia ldquoThe numerical solution ofintegro-differential equation by means of the sinc methodrdquoAppliedMathematics and Computation vol 188 no 2 pp 1124ndash1130 2007
[31] M El-Gamel and A I Zayed ldquoSinc-Galerkin method for solv-ing nonlinear boundary-value problemsrdquo Computers amp Mathe-matics with Applications vol 48 no 9 pp 1285ndash1298 2004
[32] A Saadatmandi and M Dehghan ldquoThe use of sinc-collocationmethod for solving multi-point boundary value problemsrdquoCommunications in Nonlinear Science and Numerical Simula-tion vol 17 no 2 pp 593ndash601 2012
8 Journal of Computational Engineering
[33] A Mohsen and M El-Gamel ldquoOn the numerical solution oflinear and nonlinear Volterra integral and integro-differentialequationsrdquo Applied Mathematics and Computation vol 217 no7 pp 3330ndash3337 2010
[34] H Brunner Collocation Methods for Volterra Integral and Re-lated Functional Differential Equations Cambridge UniversityPress 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Journal of Computational Engineering
[33] A Mohsen and M El-Gamel ldquoOn the numerical solution oflinear and nonlinear Volterra integral and integro-differentialequationsrdquo Applied Mathematics and Computation vol 217 no7 pp 3330ndash3337 2010
[34] H Brunner Collocation Methods for Volterra Integral and Re-lated Functional Differential Equations Cambridge UniversityPress 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of