Embed Size (px)
Citation preview
Abstract— This work proposes the development of an Adaptive Neuro-fuzzy Inference System (ANFIS) estimator applied to speed control in a three-phase induction motor sensorless drive. Usually, ANFIS is used to replace the traditional PI controller in induction motor drives. The evaluation of the estimation capability of the ANFIS in a sensorless drive is one of the contributions of this work. The ANFIS speed estimator is validated in a magnetizing flux oriented control scheme, consisting in one more contribution. As an open-loop estimator, it is applied to moderate performance drives and it is not the proposal of this work to solve the low and zero speed estimation problems. Simulations to evaluate the performance of the estimator considering the vector drive system were done from the Matlab/Simulink® software. To determine the benefits of the proposed model, a practical system was implemented using a voltage source inverter (VSI) to drive the motor and the vector control including the ANFIS estimator, which is carried out by the Real Time Toolbox from Matlab/Simulink® software and a data acquisition card from National Instruments.
Keywords— Induction motors, artificial neural networks, fuzzy logic, sensorless drives, ANFIS.
I. INTRODUÇÃO
IVERSOS estudos vêm sendo realizados há décadas para que o motor de indução opere em aplicações de alto
desempenho [1]. Esses estudos podem ser divididos em:
• Alterações das características construtivas da máquina;
• Busca de modelos matemáticos diferenciados de representação da máquina;
• Busca de novas estruturas e algoritmos de controle para o acionamento.
Dentre as possibilidades anteriormente apresentadas, inúmeros trabalhos estão concentrados na última opção, ou seja, no estudo e implementação de novas topologias e algoritmos de controle, objetivando-se então atingir o alto desempenho desejado aos acionamentos em CA.
Segundo [1], alguns dos assuntos com maior representatividade potencial para o futuro dos acionamentos em CA contemplam o acionamento escalar de motores trifásicos, o método de controle por orientação de campo (FOC - field oriented control) e o controle direto de torque (DTC - direct torque control ), controle de acionamentos em
F. Lima, Centro Universitário da FEI, São Bernardo do Campo, São
Paulo, SP, Brasil, [email protected] W. Kaiser, Escola Politécnica da USP, São Paulo, SP, Brasil,
[email protected] I. N. da Silva, Escola de Engenharia de São Carlos da USP, São Carlos,
SP, Brasil, [email protected] A. A. Oliveira Jr., Escola de Engenharia de São Carlos da USP, São
Carlos, SP, Brasil, [email protected]
CA sem sensores, controle de geradores CA de velocidade variável e acionamentos com motores lineares.
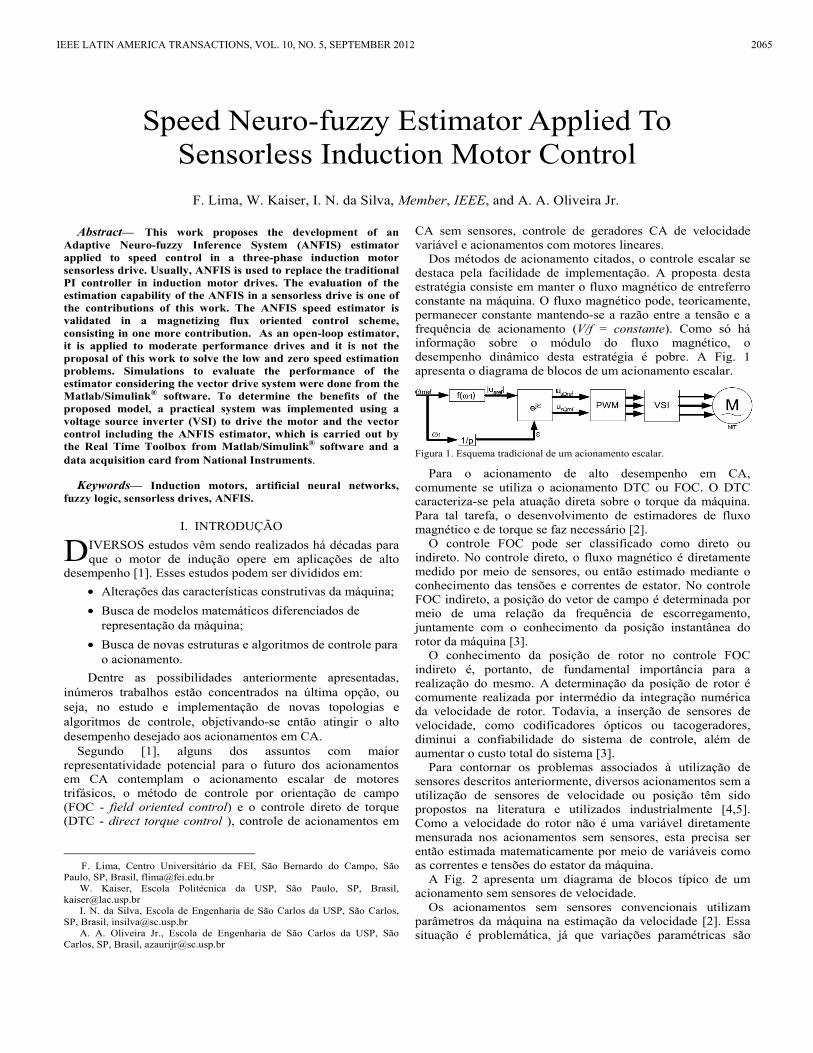
Dos métodos de acionamento citados, o controle escalar se destaca pela facilidade de implementação. A proposta desta estratégia consiste em manter o fluxo magnético de entreferro constante na máquina. O fluxo magnético pode, teoricamente, permanecer constante mantendo-se a razão entre a tensão e a frequência de acionamento (V/f = constante). Como só há informação sobre o módulo do fluxo magnético, o desempenho dinâmico desta estratégia é pobre. A Fig. 1 apresenta o diagrama de blocos de um acionamento escalar.
Figura 1. Esquema tradicional de um acionamento escalar.
Para o acionamento de alto desempenho em CA, comumente se utiliza o acionamento DTC ou FOC. O DTC caracteriza-se pela atuação direta sobre o torque da máquina. Para tal tarefa, o desenvolvimento de estimadores de fluxo magnético e de torque se faz necessário [2].
O controle FOC pode ser classificado como direto ou indireto. No controle direto, o fluxo magnético é diretamente medido por meio de sensores, ou então estimado mediante o conhecimento das tensões e correntes de estator. No controle FOC indireto, a posição do vetor de campo é determinada por meio de uma relação da frequência de escorregamento, juntamente com o conhecimento da posição instantânea do rotor da máquina [3].
O conhecimento da posição de rotor no controle FOC indireto é, portanto, de fundamental importância para a realização do mesmo. A determinação da posição de rotor é comumente realizada por intermédio da integração numérica da velocidade de rotor. Todavia, a inserção de sensores de velocidade, como codificadores ópticos ou tacogeradores, diminui a confiabilidade do sistema de controle, além de aumentar o custo total do sistema [3].
Para contornar os problemas associados à utilização de sensores descritos anteriormente, diversos acionamentos sem a utilização de sensores de velocidade ou posição têm sido propostos na literatura e utilizados industrialmente [4,5]. Como a velocidade do rotor não é uma variável diretamente mensurada nos acionamentos sem sensores, esta precisa ser então estimada matematicamente por meio de variáveis como as correntes e tensões do estator da máquina.
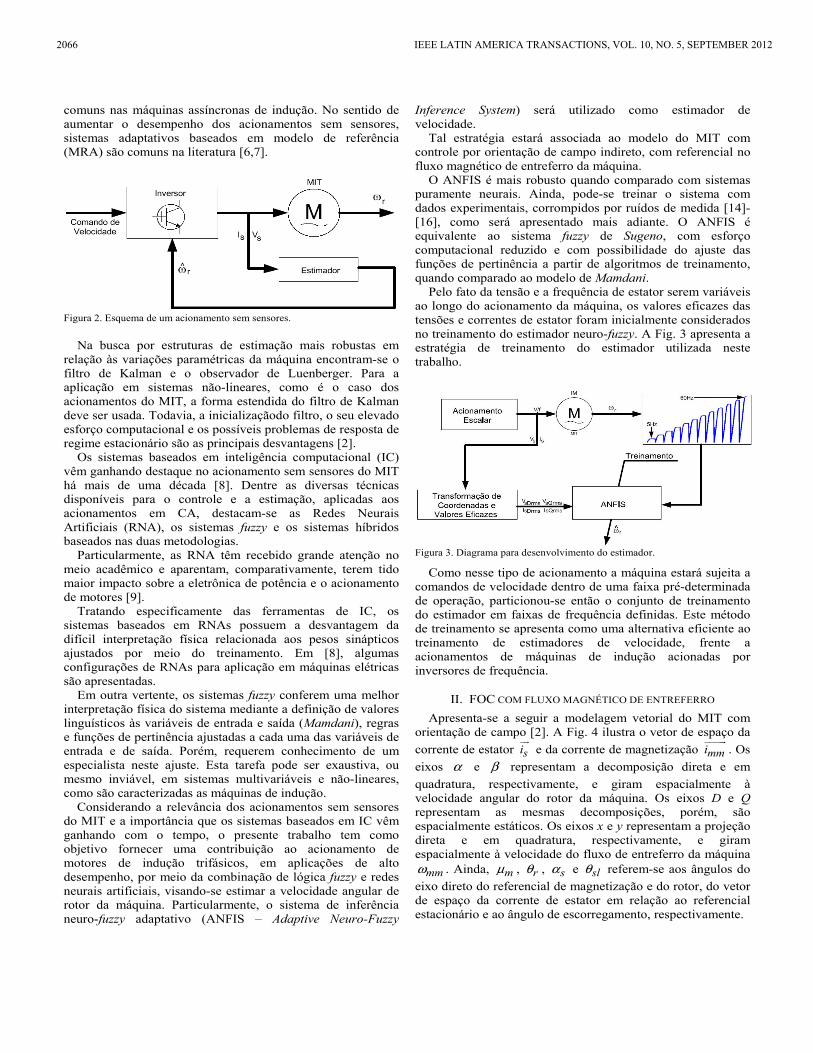
A Fig. 2 apresenta um diagrama de blocos típico de um acionamento sem sensores de velocidade.
Os acionamentos sem sensores convencionais utilizam parâmetros da máquina na estimação da velocidade [2]. Essa situação é problemática, já que variações paramétricas são
F. Lima, W. Kaiser, I. N. da Silva, Member, IEEE, and A. A. Oliveira Jr.
Speed Neuro-fuzzy Estimator Applied To Sensorless Induction Motor Control
D
IEEE LATIN AMERICA TRANSACTIONS, VOL. 10, NO. 5, SEPTEMBER 2012 2065
comuns nas máquinas assíncronas de indução. No sentido de aumentar o desempenho dos acionamentos sem sensores, sistemas adaptativos baseados em modelo de referência (MRA) são comuns na literatura [6,7].
Figura 2. Esquema de um acionamento sem sensores.
Na busca por estruturas de estimação mais robustas em relação às variações paramétricas da máquina encontram-se o filtro de Kalman e o observador de Luenberger. Para a aplicação em sistemas não-lineares, como é o caso dos acionamentos do MIT, a forma estendida do filtro de Kalman deve ser usada. Todavia, a inicializaçãodo filtro, o seu elevado esforço computacional e os possíveis problemas de resposta de regime estacionário são as principais desvantagens [2].
Os sistemas baseados em inteligência computacional (IC) vêm ganhando destaque no acionamento sem sensores do MIT há mais de uma década [8]. Dentre as diversas técnicas disponíveis para o controle e a estimação, aplicadas aos acionamentos em CA, destacam-se as Redes Neurais Artificiais (RNA), os sistemas fuzzy e os sistemas híbridos baseados nas duas metodologias.
Particularmente, as RNA têm recebido grande atenção no meio acadêmico e aparentam, comparativamente, terem tido maior impacto sobre a eletrônica de potência e o acionamento de motores [9].
Tratando especificamente das ferramentas de IC, os sistemas baseados em RNAs possuem a desvantagem da difícil interpretação física relacionada aos pesos sinápticos ajustados por meio do treinamento. Em [8], algumas configurações de RNAs para aplicação em máquinas elétricas são apresentadas.
Em outra vertente, os sistemas fuzzy conferem uma melhor interpretação física do sistema mediante a definição de valores linguísticos às variáveis de entrada e saída (Mamdani), regras e funções de pertinência ajustadas a cada uma das variáveis de entrada e de saída. Porém, requerem conhecimento de um especialista neste ajuste. Esta tarefa pode ser exaustiva, ou mesmo inviável, em sistemas multivariáveis e não-lineares, como são caracterizadas as máquinas de indução.
Considerando a relevância dos acionamentos sem sensores do MIT e a importância que os sistemas baseados em IC vêm ganhando com o tempo, o presente trabalho tem como objetivo fornecer uma contribuição ao acionamento de motores de indução trifásicos, em aplicações de alto desempenho, por meio da combinação de lógica fuzzy e redes neurais artificiais, visando-se estimar a velocidade angular de rotor da máquina. Particularmente, o sistema de inferência neuro-fuzzy adaptativo (ANFIS – Adaptive Neuro-Fuzzy
Inference System) será utilizado como estimador de velocidade.
Tal estratégia estará associada ao modelo do MIT com controle por orientação de campo indireto, com referencial no fluxo magnético de entreferro da máquina.
O ANFIS é mais robusto quando comparado com sistemas puramente neurais. Ainda, pode-se treinar o sistema com dados experimentais, corrompidos por ruídos de medida [14]-[16], como será apresentado mais adiante. O ANFIS é equivalente ao sistema fuzzy de Sugeno, com esforço computacional reduzido e com possibilidade do ajuste das funções de pertinência a partir de algoritmos de treinamento, quando comparado ao modelo de Mamdani.
Pelo fato da tensão e a frequência de estator serem variáveis ao longo do acionamento da máquina, os valores eficazes das tensões e correntes de estator foram inicialmente considerados no treinamento do estimador neuro-fuzzy. A Fig. 3 apresenta a estratégia de treinamento do estimador utilizada neste trabalho.
Figura 3. Diagrama para desenvolvimento do estimador.
Como nesse tipo de acionamento a máquina estará sujeita a comandos de velocidade dentro de uma faixa pré-determinada de operação, particionou-se então o conjunto de treinamento do estimador em faixas de frequência definidas. Este método de treinamento se apresenta como uma alternativa eficiente ao treinamento de estimadores de velocidade, frente a acionamentos de máquinas de indução acionadas por inversores de frequência.
II. FOC COM FLUXO MAGNÉTICO DE ENTREFERRO
Apresenta-se a seguir a modelagem vetorial do MIT com orientação de campo [2]. A Fig. 4 ilustra o vetor de espaço da
corrente de estator si
e da corrente de magnetização mmi
. Os
eixos α e β representam a decomposição direta e em
quadratura, respectivamente, e giram espacialmente à velocidade angular do rotor da máquina. Os eixos D e Q representam as mesmas decomposições, porém, são espacialmente estáticos. Os eixos x e y representam a projeção direta e em quadratura, respectivamente, e giram espacialmente à velocidade do fluxo de entreferro da máquina
mmω . Ainda, mμ , rθ , sα e slθ referem-se aos ângulos do
eixo direto do referencial de magnetização e do rotor, do vetor de espaço da corrente de estator em relação ao referencial estacionário e ao ângulo de escorregamento, respectivamente.
2066 IEEE LATIN AMERICA TRANSACTIONS, VOL. 10, NO. 5, SEPTEMBER 2012
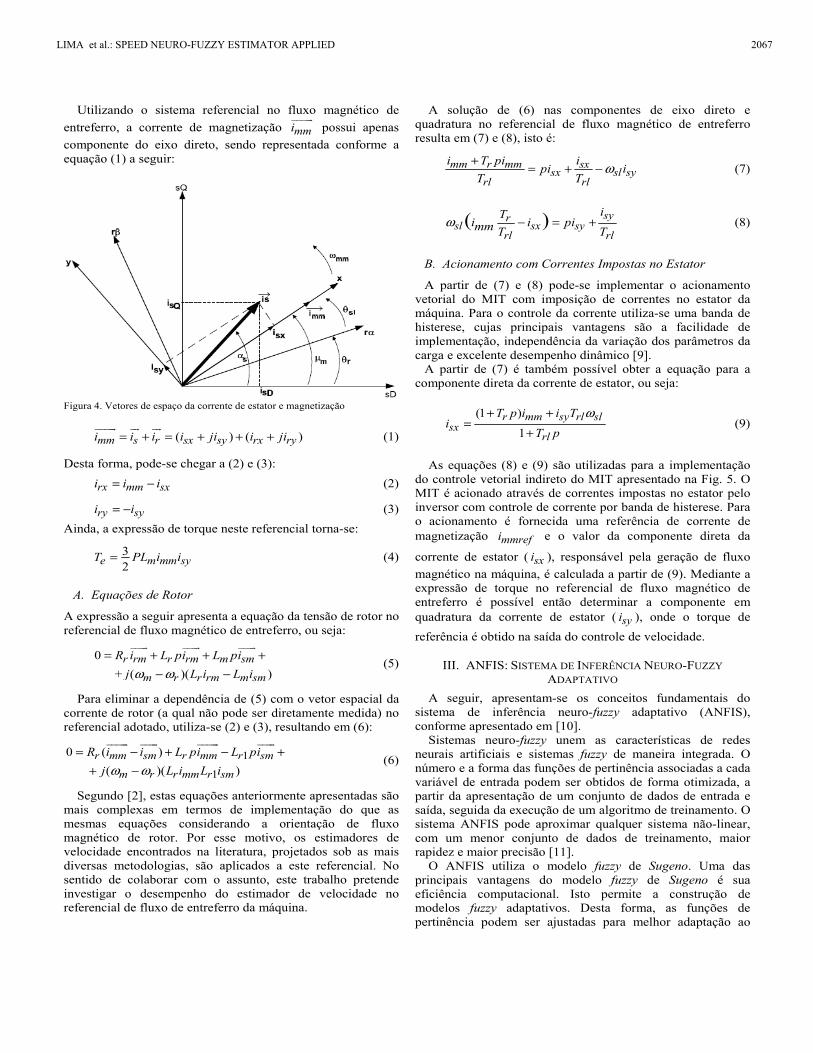
Utilizando o sistema referencial no fluxo magnético de
entreferro, a corrente de magnetização mmi
possui apenas
componente do eixo direto, sendo representada conforme a equação (1) a seguir:
Figura 4. Vetores de espaço da corrente de estator e magnetização
( ) ( )mm s r sx sy rx ryi i i i ji i ji= + = + + +
(1)
Desta forma, pode-se chegar a (2) e (3):
rx mm sxi i i= − (2)
ry syi i= − (3)
Ainda, a expressão de torque neste referencial torna-se:
32e m mm syT PL i i= (4)
A. Equações de Rotor
A expressão a seguir apresenta a equação da tensão de rotor no referencial de fluxo magnético de entreferro, ou seja:
0
+ ( )( )r rm r rm m sm
m r r rm m sm
R i L pi L pi
j L i L iω ω= + + +
− −
(5)
Para eliminar a dependência de (5) com o vetor espacial da corrente de rotor (a qual não pode ser diretamente medida) no referencial adotado, utiliza-se (2) e (3), resultando em (6):
1
1
0 ( )
( )( )r mm sm r mm r sm
m r r mm r sm
R i i L pi L pi
j L i L iω ω= − + − +
+ −
(6)
Segundo [2], estas equações anteriormente apresentadas são mais complexas em termos de implementação do que as mesmas equações considerando a orientação de fluxo magnético de rotor. Por esse motivo, os estimadores de velocidade encontrados na literatura, projetados sob as mais diversas metodologias, são aplicados a este referencial. No sentido de colaborar com o assunto, este trabalho pretende investigar o desempenho do estimador de velocidade no referencial de fluxo de entreferro da máquina.
A solução de (6) nas componentes de eixo direto e quadratura no referencial de fluxo magnético de entreferro resulta em (7) e (8), isto é:
mm r mm sxsx sl sy
rl rl
i T pi ipi i
T Tω+
= + − (7)
( ) syrsl sx sy
rl rl
iTi i pimm T T
ω − = + (8)
B. Acionamento com Correntes Impostas no Estator
A partir de (7) e (8) pode-se implementar o acionamento vetorial do MIT com imposição de correntes no estator da máquina. Para o controle da corrente utiliza-se uma banda de histerese, cujas principais vantagens são a facilidade de implementação, independência da variação dos parâmetros da carga e excelente desempenho dinâmico [9].
A partir de (7) é também possível obter a equação para a componente direta da corrente de estator, ou seja:
(1 )
1
r mm sy rl slsx
rl
T p i i Ti
T p
ω+ +=
+ (9)
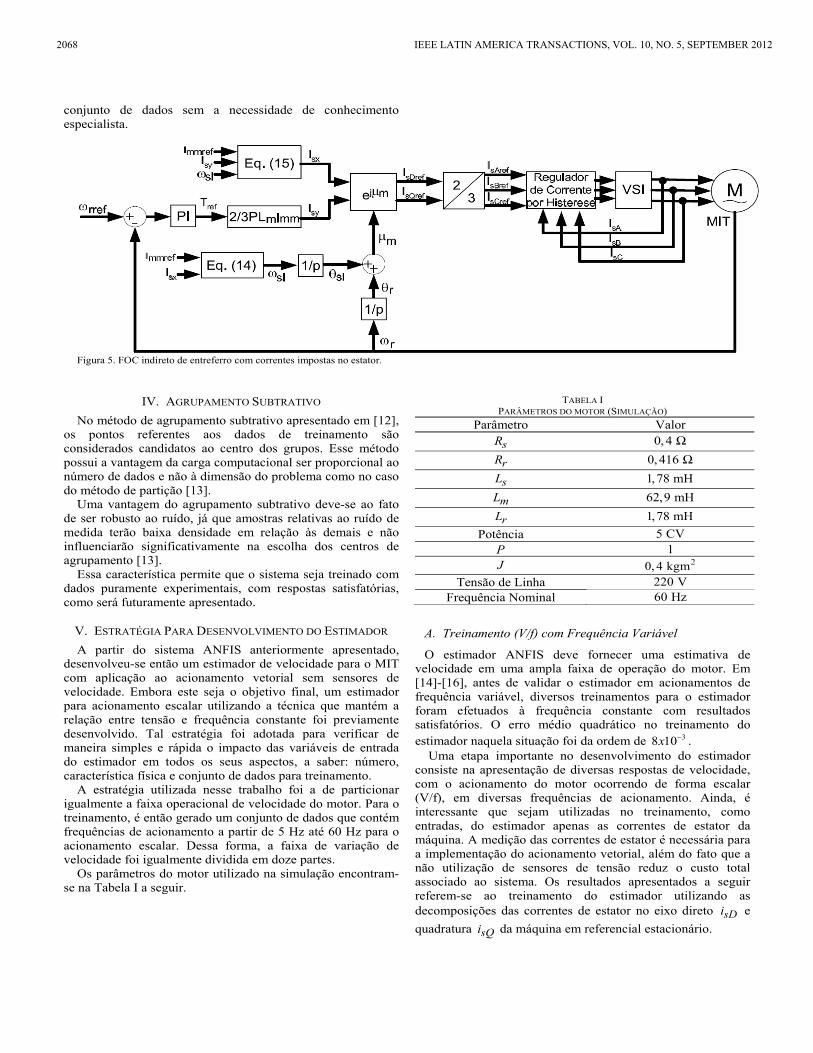
As equações (8) e (9) são utilizadas para a implementação do controle vetorial indireto do MIT apresentado na Fig. 5. O MIT é acionado através de correntes impostas no estator pelo inversor com controle de corrente por banda de histerese. Para o acionamento é fornecida uma referência de corrente de magnetização mmrefi e o valor da componente direta da
corrente de estator ( sxi ), responsável pela geração de fluxo
magnético na máquina, é calculada a partir de (9). Mediante a expressão de torque no referencial de fluxo magnético de entreferro é possível então determinar a componente em quadratura da corrente de estator ( syi ), onde o torque de
referência é obtido na saída do controle de velocidade.
III. ANFIS: SISTEMA DE INFERÊNCIA NEURO-FUZZY
ADAPTATIVO
A seguir, apresentam-se os conceitos fundamentais do sistema de inferência neuro-fuzzy adaptativo (ANFIS), conforme apresentado em [10].
Sistemas neuro-fuzzy unem as características de redes neurais artificiais e sistemas fuzzy de maneira integrada. O número e a forma das funções de pertinência associadas a cada variável de entrada podem ser obtidos de forma otimizada, a partir da apresentação de um conjunto de dados de entrada e saída, seguida da execução de um algoritmo de treinamento. O sistema ANFIS pode aproximar qualquer sistema não-linear, com um menor conjunto de dados de treinamento, maior rapidez e maior precisão [11].
O ANFIS utiliza o modelo fuzzy de Sugeno. Uma das principais vantagens do modelo fuzzy de Sugeno é sua eficiência computacional. Isto permite a construção de modelos fuzzy adaptativos. Desta forma, as funções de pertinência podem ser ajustadas para melhor adaptação ao
LIMA et al.: SPEED NEURO-FUZZY ESTIMATOR APPLIED 2067
conjunto de dados sem a necessidade de conhecimento especialista.
Figura 5. FOC indireto de entreferro com correntes impostas no estator.
IV. AGRUPAMENTO SUBTRATIVO
No método de agrupamento subtrativo apresentado em [12], os pontos referentes aos dados de treinamento são considerados candidatos ao centro dos grupos. Esse método possui a vantagem da carga computacional ser proporcional ao número de dados e não à dimensão do problema como no caso do método de partição [13].
Uma vantagem do agrupamento subtrativo deve-se ao fato de ser robusto ao ruído, já que amostras relativas ao ruído de medida terão baixa densidade em relação às demais e não influenciarão significativamente na escolha dos centros de agrupamento [13].
Essa característica permite que o sistema seja treinado com dados puramente experimentais, com respostas satisfatórias, como será futuramente apresentado.
V. ESTRATÉGIA PARA DESENVOLVIMENTO DO ESTIMADOR
A partir do sistema ANFIS anteriormente apresentado, desenvolveu-se então um estimador de velocidade para o MIT com aplicação ao acionamento vetorial sem sensores de velocidade. Embora este seja o objetivo final, um estimador para acionamento escalar utilizando a técnica que mantém a relação entre tensão e frequência constante foi previamente desenvolvido. Tal estratégia foi adotada para verificar de maneira simples e rápida o impacto das variáveis de entrada do estimador em todos os seus aspectos, a saber: número, característica física e conjunto de dados para treinamento.
A estratégia utilizada nesse trabalho foi a de particionar igualmente a faixa operacional de velocidade do motor. Para o treinamento, é então gerado um conjunto de dados que contém frequências de acionamento a partir de 5 Hz até 60 Hz para o acionamento escalar. Dessa forma, a faixa de variação de velocidade foi igualmente dividida em doze partes.
Os parâmetros do motor utilizado na simulação encontram-se na Tabela I a seguir.
TABELA I PARÂMETROS DO MOTOR (SIMULAÇÃO)
Parâmetro Valor
sR 0, 4 Ω
rR 0, 416 Ω
sL 1,78 mH
mL 62,9 mH
rL 1,78 mH
Potência 5 CV P 1 J 20, 4 kgm
Tensão de Linha 220 V Frequência Nominal 60 Hz
A. Treinamento (V/f) com Frequência Variável
O estimador ANFIS deve fornecer uma estimativa de velocidade em uma ampla faixa de operação do motor. Em [14]-[16], antes de validar o estimador em acionamentos de frequência variável, diversos treinamentos para o estimador foram efetuados à frequência constante com resultados satisfatórios. O erro médio quadrático no treinamento do estimador naquela situação foi da ordem de 38 10x − . Uma etapa importante no desenvolvimento do estimador consiste na apresentação de diversas respostas de velocidade, com o acionamento do motor ocorrendo de forma escalar (V/f), em diversas frequências de acionamento. Ainda, é interessante que sejam utilizadas no treinamento, como entradas, do estimador apenas as correntes de estator da máquina. A medição das correntes de estator é necessária para a implementação do acionamento vetorial, além do fato que a não utilização de sensores de tensão reduz o custo total associado ao sistema. Os resultados apresentados a seguir referem-se ao treinamento do estimador utilizando as decomposições das correntes de estator no eixo direto sDi e
quadratura sQi da máquina em referencial estacionário.
2068 IEEE LATIN AMERICA TRANSACTIONS, VOL. 10, NO. 5, SEPTEMBER 2012
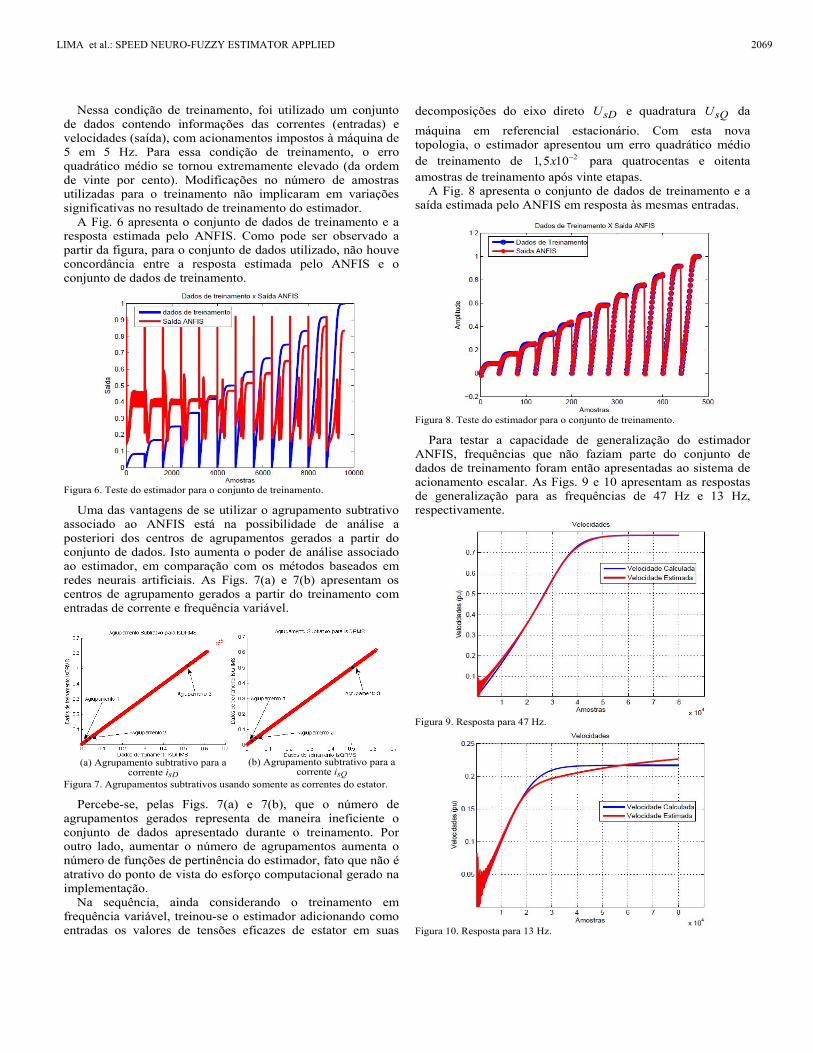
Nessa condição de treinamento, foi utilizado um conjunto de dados contendo informações das correntes (entradas) e velocidades (saída), com acionamentos impostos à máquina de 5 em 5 Hz. Para essa condição de treinamento, o erro quadrático médio se tornou extremamente elevado (da ordem de vinte por cento). Modificações no número de amostras utilizadas para o treinamento não implicaram em variações significativas no resultado de treinamento do estimador.
A Fig. 6 apresenta o conjunto de dados de treinamento e a resposta estimada pelo ANFIS. Como pode ser observado a partir da figura, para o conjunto de dados utilizado, não houve concordância entre a resposta estimada pelo ANFIS e o conjunto de dados de treinamento.
Figura 6. Teste do estimador para o conjunto de treinamento.
Uma das vantagens de se utilizar o agrupamento subtrativo associado ao ANFIS está na possibilidade de análise a posteriori dos centros de agrupamentos gerados a partir do conjunto de dados. Isto aumenta o poder de análise associado ao estimador, em comparação com os métodos baseados em redes neurais artificiais. As Figs. 7(a) e 7(b) apresentam os centros de agrupamento gerados a partir do treinamento com entradas de corrente e frequência variável.
Figura 7. Agrupamentos subtrativos usando somente as correntes do estator.
Percebe-se, pelas Figs. 7(a) e 7(b), que o número de agrupamentos gerados representa de maneira ineficiente o conjunto de dados apresentado durante o treinamento. Por outro lado, aumentar o número de agrupamentos aumenta o número de funções de pertinência do estimador, fato que não é atrativo do ponto de vista do esforço computacional gerado na implementação.
Na sequência, ainda considerando o treinamento em frequência variável, treinou-se o estimador adicionando como entradas os valores de tensões eficazes de estator em suas
decomposições do eixo direto sDU e quadratura sQU da
máquina em referencial estacionário. Com esta nova topologia, o estimador apresentou um erro quadrático médio de treinamento de 21,5 10x − para quatrocentas e oitenta amostras de treinamento após vinte etapas.
A Fig. 8 apresenta o conjunto de dados de treinamento e a saída estimada pelo ANFIS em resposta às mesmas entradas.
Figura 8. Teste do estimador para o conjunto de treinamento.
Para testar a capacidade de generalização do estimador ANFIS, frequências que não faziam parte do conjunto de dados de treinamento foram então apresentadas ao sistema de acionamento escalar. As Figs. 9 e 10 apresentam as respostas de generalização para as frequências de 47 Hz e 13 Hz, respectivamente.
Figura 9. Resposta para 47 Hz.
Figura 10. Resposta para 13 Hz.
(a) Agrupamento subtrativo para a corrente isD
(b) Agrupamento subtrativo para a corrente isQ
LIMA et al.: SPEED NEURO-FUZZY ESTIMATOR APPLIED 2069
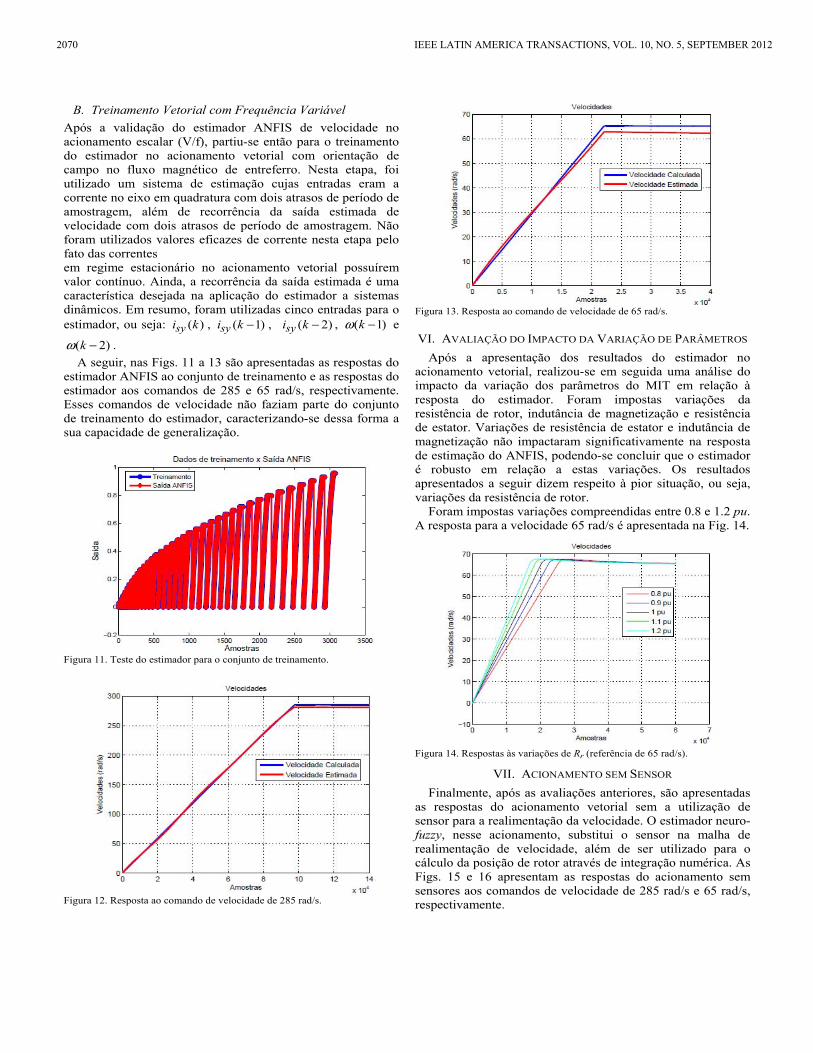
B. Treinamento Vetorial com Frequência Variável
Após a validação do estimador ANFIS de velocidade no acionamento escalar (V/f), partiu-se então para o treinamento do estimador no acionamento vetorial com orientação de campo no fluxo magnético de entreferro. Nesta etapa, foi utilizado um sistema de estimação cujas entradas eram a corrente no eixo em quadratura com dois atrasos de período de amostragem, além de recorrência da saída estimada de velocidade com dois atrasos de período de amostragem. Não foram utilizados valores eficazes de corrente nesta etapa pelo fato das correntes em regime estacionário no acionamento vetorial possuírem valor contínuo. Ainda, a recorrência da saída estimada é uma característica desejada na aplicação do estimador a sistemas dinâmicos. Em resumo, foram utilizadas cinco entradas para o estimador, ou seja: ( )syi k , ( 1)syi k − , ( 2)syi k − , ( 1)kω − e
( 2)kω − .
A seguir, nas Figs. 11 a 13 são apresentadas as respostas do estimador ANFIS ao conjunto de treinamento e as respostas do estimador aos comandos de 285 e 65 rad/s, respectivamente. Esses comandos de velocidade não faziam parte do conjunto de treinamento do estimador, caracterizando-se dessa forma a sua capacidade de generalização.
Figura 11. Teste do estimador para o conjunto de treinamento.
Figura 12. Resposta ao comando de velocidade de 285 rad/s.
Figura 13. Resposta ao comando de velocidade de 65 rad/s.
VI. AVALIAÇÃO DO IMPACTO DA VARIAÇÃO DE PARÂMETROS
Após a apresentação dos resultados do estimador no acionamento vetorial, realizou-se em seguida uma análise do impacto da variação dos parâmetros do MIT em relação à resposta do estimador. Foram impostas variações da resistência de rotor, indutância de magnetização e resistência de estator. Variações de resistência de estator e indutância de magnetização não impactaram significativamente na resposta de estimação do ANFIS, podendo-se concluir que o estimador é robusto em relação a estas variações. Os resultados apresentados a seguir dizem respeito à pior situação, ou seja, variações da resistência de rotor.
Foram impostas variações compreendidas entre 0.8 e 1.2 pu. A resposta para a velocidade 65 rad/s é apresentada na Fig. 14.
Figura 14. Respostas às variações de Rr (referência de 65 rad/s).
VII. ACIONAMENTO SEM SENSOR
Finalmente, após as avaliações anteriores, são apresentadas as respostas do acionamento vetorial sem a utilização de sensor para a realimentação da velocidade. O estimador neuro-fuzzy, nesse acionamento, substitui o sensor na malha de realimentação de velocidade, além de ser utilizado para o cálculo da posição de rotor através de integração numérica. As Figs. 15 e 16 apresentam as respostas do acionamento sem sensores aos comandos de velocidade de 285 rad/s e 65 rad/s, respectivamente.
2070 IEEE LATIN AMERICA TRANSACTIONS, VOL. 10, NO. 5, SEPTEMBER 2012
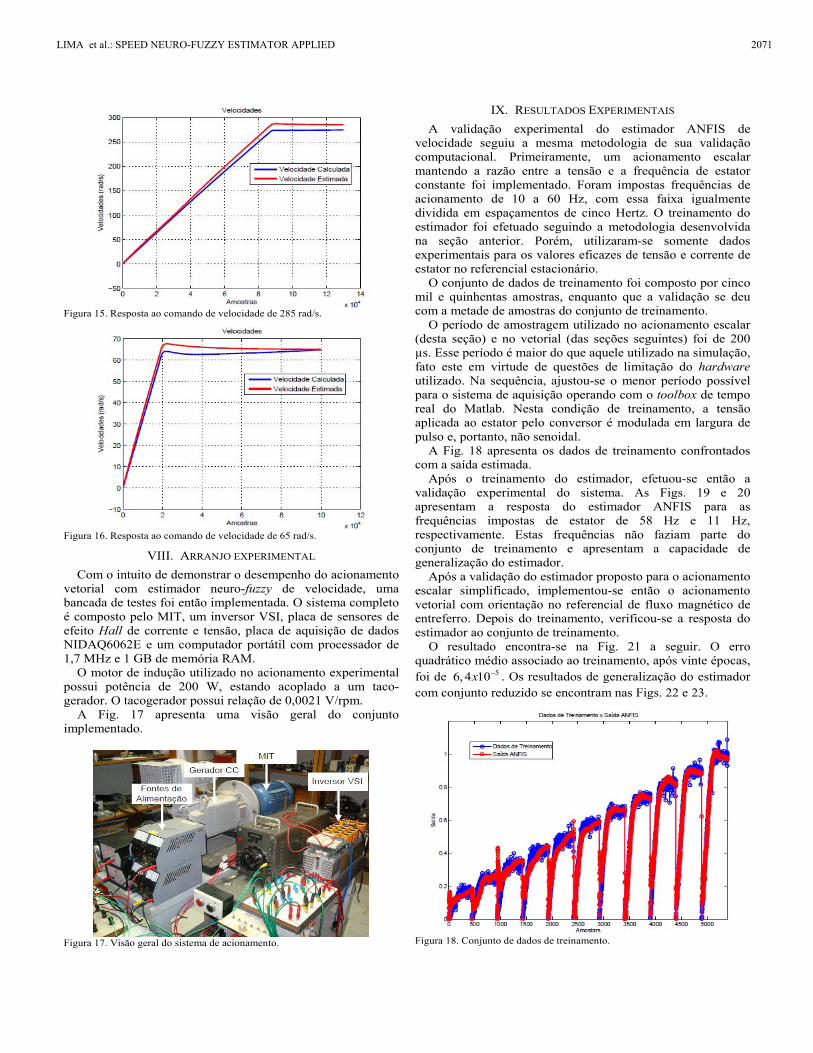
Figura 15. Resposta ao comando de velocidade de 285 rad/s.
Figura 16. Resposta ao comando de velocidade de 65 rad/s.
VIII. ARRANJO EXPERIMENTAL
Com o intuito de demonstrar o desempenho do acionamento vetorial com estimador neuro-fuzzy de velocidade, uma bancada de testes foi então implementada. O sistema completo é composto pelo MIT, um inversor VSI, placa de sensores de efeito Hall de corrente e tensão, placa de aquisição de dados NIDAQ6062E e um computador portátil com processador de 1,7 MHz e 1 GB de memória RAM.
O motor de indução utilizado no acionamento experimental possui potência de 200 W, estando acoplado a um taco-gerador. O tacogerador possui relação de 0,0021 V/rpm.
A Fig. 17 apresenta uma visão geral do conjunto implementado.
Figura 17. Visão geral do sistema de acionamento.
IX. RESULTADOS EXPERIMENTAIS
A validação experimental do estimador ANFIS de velocidade seguiu a mesma metodologia de sua validação computacional. Primeiramente, um acionamento escalar mantendo a razão entre a tensão e a frequência de estator constante foi implementado. Foram impostas frequências de acionamento de 10 a 60 Hz, com essa faixa igualmente dividida em espaçamentos de cinco Hertz. O treinamento do estimador foi efetuado seguindo a metodologia desenvolvida na seção anterior. Porém, utilizaram-se somente dados experimentais para os valores eficazes de tensão e corrente de estator no referencial estacionário.
O conjunto de dados de treinamento foi composto por cinco mil e quinhentas amostras, enquanto que a validação se deu com a metade de amostras do conjunto de treinamento.
O período de amostragem utilizado no acionamento escalar (desta seção) e no vetorial (das seções seguintes) foi de 200 µs. Esse período é maior do que aquele utilizado na simulação, fato este em virtude de questões de limitação do hardware utilizado. Na sequência, ajustou-se o menor período possível para o sistema de aquisição operando com o toolbox de tempo real do Matlab. Nesta condição de treinamento, a tensão aplicada ao estator pelo conversor é modulada em largura de pulso e, portanto, não senoidal.
A Fig. 18 apresenta os dados de treinamento confrontados com a saída estimada.
Após o treinamento do estimador, efetuou-se então a validação experimental do sistema. As Figs. 19 e 20 apresentam a resposta do estimador ANFIS para as frequências impostas de estator de 58 Hz e 11 Hz, respectivamente. Estas frequências não faziam parte do conjunto de treinamento e apresentam a capacidade de generalização do estimador.
Após a validação do estimador proposto para o acionamento escalar simplificado, implementou-se então o acionamento vetorial com orientação no referencial de fluxo magnético de entreferro. Depois do treinamento, verificou-se a resposta do estimador ao conjunto de treinamento.
O resultado encontra-se na Fig. 21 a seguir. O erro quadrático médio associado ao treinamento, após vinte épocas, foi de 56, 4 10x − . Os resultados de generalização do estimador com conjunto reduzido se encontram nas Figs. 22 e 23.
Figura 18. Conjunto de dados de treinamento.
LIMA et al.: SPEED NEURO-FUZZY ESTIMATOR APPLIED 2071
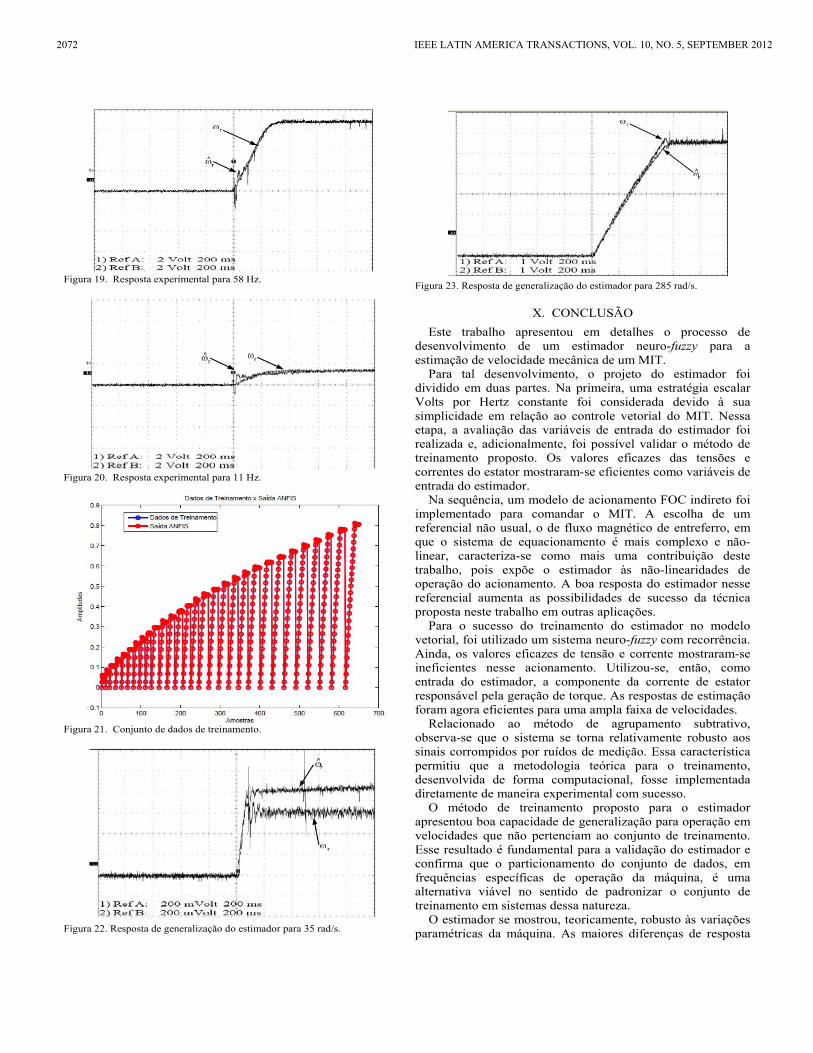
Figura 19. Resposta experimental para 58 Hz.
Figura 20. Resposta experimental para 11 Hz.
Figura 21. Conjunto de dados de treinamento.
Figura 22. Resposta de generalização do estimador para 35 rad/s.
Figura 23. Resposta de generalização do estimador para 285 rad/s.
X. CONCLUSÃO
Este trabalho apresentou em detalhes o processo de desenvolvimento de um estimador neuro-fuzzy para a estimação de velocidade mecânica de um MIT.
Para tal desenvolvimento, o projeto do estimador foi dividido em duas partes. Na primeira, uma estratégia escalar Volts por Hertz constante foi considerada devido à sua simplicidade em relação ao controle vetorial do MIT. Nessa etapa, a avaliação das variáveis de entrada do estimador foi realizada e, adicionalmente, foi possível validar o método de treinamento proposto. Os valores eficazes das tensões e correntes do estator mostraram-se eficientes como variáveis de entrada do estimador.
Na sequência, um modelo de acionamento FOC indireto foi implementado para comandar o MIT. A escolha de um referencial não usual, o de fluxo magnético de entreferro, em que o sistema de equacionamento é mais complexo e não- linear, caracteriza-se como mais uma contribuição deste trabalho, pois expõe o estimador às não-linearidades de operação do acionamento. A boa resposta do estimador nesse referencial aumenta as possibilidades de sucesso da técnica proposta neste trabalho em outras aplicações.
Para o sucesso do treinamento do estimador no modelo vetorial, foi utilizado um sistema neuro-fuzzy com recorrência. Ainda, os valores eficazes de tensão e corrente mostraram-se ineficientes nesse acionamento. Utilizou-se, então, como entrada do estimador, a componente da corrente de estator responsável pela geração de torque. As respostas de estimação foram agora eficientes para uma ampla faixa de velocidades.
Relacionado ao método de agrupamento subtrativo, observa-se que o sistema se torna relativamente robusto aos sinais corrompidos por ruídos de medição. Essa característica permitiu que a metodologia teórica para o treinamento, desenvolvida de forma computacional, fosse implementada diretamente de maneira experimental com sucesso.
O método de treinamento proposto para o estimador apresentou boa capacidade de generalização para operação em velocidades que não pertenciam ao conjunto de treinamento. Esse resultado é fundamental para a validação do estimador e confirma que o particionamento do conjunto de dados, em frequências específicas de operação da máquina, é uma alternativa viável no sentido de padronizar o conjunto de treinamento em sistemas dessa natureza.
O estimador se mostrou, teoricamente, robusto às variações paramétricas da máquina. As maiores diferenças de resposta
2072 IEEE LATIN AMERICA TRANSACTIONS, VOL. 10, NO. 5, SEPTEMBER 2012
estão associadas à resistência de rotor. Dessa forma, adaptações nessa variável fazem-se necessárias.
REFERÊNCIAS [1] I. Boldea, “Control issues in adjustable speed drives,” IEEE Industrial
Electronics Magazine, vol. 2, no. 3, pp. 32-50, 2008. [2] P. Vas, Sensorless Vector and Direct Torque Control, Oxford Univ.
Press, 1998. [3] R. Lorenz, T. Lipo and D. Novotny, “Motion control with induction
motors,” Proceedings of the IEEE, vol. 82, no. 8, pp. 1215-1240, 1994. [4] J. Holtz, “Sensorless Control of Induction Machines – With or Without
Signal Injection?,” IEEE Transactions on Industrial Electronics, vol. 53, no. 1, pp. 7-30, 2006.
[5] C. Lascu, I. Boldea and F. Blaabjerg, “Comparative study of adaptive and inherently sensorless observers for variable speed induction motor drives,” IEEE Transactions on Industrial Electronics, vol. 53, no. 1, pp. 57-65, 2005.
[6] T. Orlowska-Kowalska and T. Dybkowski, “Stator current based MRAS estimator for a wide range speed sensorless induction motor drive,” IEEE Transactions on Industrial Electronics, vol. 57, no. 4, pp. 1296-1308, 2010.
[7] M. Cirrincione and M. Pucci, “An MRAS based sensorless high performance induction motor drive with a predictive adaptive model,” IEEE Transaction on Industrial Electronics, vol. 52, no. 2, pp. 532-551, 2005.
[8] P. Vas, Artificial-Intelligence-Based Electrical Machines and Drives, Oxford University Press, 1999.
[9] B. K. Bose, “Neural network applications in power electronics and motor drives – an introduction and perspective,” IEEE Transactions on Industrial Electronics, vol. 54, no. 1, pp. 14-33, 2007.
[10] T.S.R. Jang, C.T. Sun and E. Mizutani, Neuro-Fuzzy and Soft Computing – A Computational Approach to Learning and Machine Intelligence, Prentice Hall, 1997.
[11] Z. Hou, Q. Shen and H. Li, “Nonlinear system identification based on ANFIS,” IEEE International Conference on Neural Networks and Signal Processing, 2003.
[12] S. L. Chiu, “Fuzzy model identification based on cluster estimation,” Journal of Intelligent and Fuzzy System, vol. 2, no. 3, pp. 267-278, 1994.
[13] R. P. Paiva and A. Dourado, “Interpretability and learning in neuro-fuzzy systems”, Fuzzy Sets and Systems, vol. 147, no. 1, pp. 17-38, 2004.
[14] F. Lima, W. Kaiser, I. N. da Silva and A. A. Oliveira Júnior, “Development of a speed neuro-fuzzy estimator for sensorless magnetizing flux oriented induction motor control,” 35th International Conference of the IEEE Industrial Electronics Society – IECON, 2009.
[15] F. Lima, W. Kaiser, I.N. da Silva and A. A. Oliveira Júnior, “Speed neuro-fuzzy estimator for sensorless indirect flux oriented induction motor drive,” 36th International Conference of the IEEE Industrial Electronics Society – IECON, 2010.
[16] F. Lima, Estimador Neuro-Fuzzy de Velocidade Aplicado ao Controle Vetorial sem Sensores de Motores de Indução Trifásicos, Tese (Doutorado), Universidade de São Paulo, 2010.
[17] H. Gonzalez, R. Rivas and T. Rodríguez, “Using an artificial neural network as a rotor resistance estimator in the indirect vector control of an induction motor,” IEEE Latin America Transactions, vol. 6, no. 2, pp. 176-183, 2008.
[18] E. Napieralska, L. Kawecki and T. Niewierowicz, “Determination of electromagnetic losses in electric motors applying neural networks”, IEEE Latin America Transactions, vol. 9, no. 5, pp. 747-752, 2011.
Fábio Lima nasceu em 12/02/1975 em São Paulo (SP). Possui graduação em Engenharia Elétrica com ênfase em Acionamentos e Controle pela Universidade Estadual Paulista - UNESP (1998), mestrado pela Universidade de São Paulo - Escola de Engenharia de São Carlos (2001) e doutorado pela Universidade de São Paulo – Escola Politécnica (2010). Atualmente é professor assistente I do Centro Universitário da FEI e professor assistente PCA-4 da Universidade de Mogi das Cruzes (UMC). É assessor científico da FAPESP. Possui experiência na área de
Engenharia Elétrica, com ênfase em acionamentos e controle, atuando principalmente nos seguintes temas: acionamento e controle de motores elétricos, inteligência computacional aplicada ao acionamento de motores elétricos, acionamentos sensorless, turbogeradores suportados a mancal magnético, sistemas de controle e automação. É membro do IEEE-IES e da SOBRAEP.
Walter Kaiser é graduado em Engenharia Elétrica pela Escola Politécnica em 1980 e bacharel em Física pelo Instituto de Física, ambos da Universidade de São Paulo. É mestre desde 1983 e doutor desde 1989, em Engenharia Elétrica, pela Escola Politécnica desta mesma Universidade. Desde 1990 é docente da Escola Politécnica e atualmente é professor associado do Departamento de Engenharia de Energia e Automação Elétrica, onde leciona disciplinas de Eletrônica de Potência e Controle. Suas linhas de pesquisa são lâmpadas e seus respectivos conversores
eletrônicos, retificadores comutados pela rede e conversores estáticos de qualquer tipo.
Ivan Nunes da Silva nascido em 03/08/1967 em São José do Rio Preto (SP) é engenheiro eletricista (1992) e bacharel em ciência da computação (1991) pela Universidade Federal de Uberlândia; mestre (1995) e doutor em Engenharia Elétrica (1997) pela Universidade Estadual de Campinas (UNICAMP). É coordenador do Laboratório de Automação Inteligente de Processos e Sistemas (LAIPS). É professor associado do Departamento de Engenharia Elétrica da Escola de Engenharia de São Carlos (EESC) da Universidade de São Paulo (USP) desde
2004. Suas áreas de interesse são: sistemas inteligentes, identificação de processos e Ensino de Engenharia. É membro da SBA e IEEE, sendo atualmente editor associado da revista Controle & Automação.
Azauri Albano de Oliveira Júnior nascido em 23/07/1955, em Franca (SP), é engenheiro eletricista/eletrônico (1977) pela Escola de Engenharia de São Carlos (EESC) da Universidade de São Paulo (USP). Mestre em Engenharia Elétrica (1984) pela EESC/USP e doutor em Engenharia Elétrica (1991) pela Escola Politécnica da USP. É coordenador do Laboratório de Controle e Eletrônica de Potência (LACEP) do Departamento de Engenharia Elétrica da EESC/USP. É professor do Departamento de Engenharia Elétrica da EESC-USP
desde 1977. Suas áreas de interesse são: eletrônica de potência, acionamento e controle de máquinas elétricas e ensino de Engenharia Elétrica. É membro da ABENGE e da SOBRAEP.
LIMA et al.: SPEED NEURO-FUZZY ESTIMATOR APPLIED 2073





























