Embed Size (px)
Citation preview

1
UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
FACULTAD DE CIENCIAS-ESCUELA DE FÍSICA
FÍSICA DE OSCILACIONES ONDAS Y ÓPTICA
MÓDULO # 13: ÓPTICA GEOMÉTRICA-SFI (SUPERFICIES REFRACTORAS)- Diego Luis Aristizábal R., Roberto Restrepo A., Tatiana Muñoz H.
Profesores, Escuela de Física de la Universidad Nacional de Colombia Sede Medellín
Temas
Introducción
Sistemas formadores de imágenes (SFI)
Superficies refractoras esféricas (SRE)
Aspecto 1: Propiedades focales de las SR
Aspecto 2: Fórmula de Gauss de las SRE
Aspecto 3: Ecuación del constructor de las SRE
Aspecto 4: Trazado de imágenes en las SRE
Aspecto 5: Aumento en las SRE
Introducción
En este módulo y los dos que siguen se tratarán los sistemas formadores de imagen (SFI) por reflexión o
por refracción: en éste se estudiará las denominadas superficies refractoras (SFI por refracción), en el
módulo # 14 se estudiará los espejos (SFI por reflexión) y en el módulo # 14 las lentes (SFI por
refracción, se componen de dos superficies refractoras). El tratamiento de los SFI se hará desde la óptica
geométrica, la cual hace una aproximación que es válida siempre que la longitud de onda de la luz es mucho
menor que las dimensiones de los obstáculos o discontinuidades a través de los cuales se propaga.
Adicionalmente se supondrá aproximación paraxial (en estas circunstancias, los ángulos que forman los
rayos con el eje principal son tan pequeños (menores o iguales a 0,44 rad, en donde sus senos y tangentes
son equivalentes a dichos ángulos expresados en radianes):sen=tan=), es decir, se supondrá la
denominada condición de estigmatismo bajo la cual a cada punto del objeto le corresponde un único punto
en la imagen: los sistemas estigmáticos dan imágenes nítidas. Estrictamente, a cada punto del objeto le
corresponde una mancha en la imagen (es decir, son astigmáticos) debido a los efectos de difracción y de
no paraxialidad: esto hace que el SFI tenga un límite de resolución y aparezcan algunas de las denominadas
aberraciones.
Se debe recordar los principios de la óptica geométrica:
Trayectorias rectilíneas en medios homogéneos e isótropos.
Se cumple la ley de la reflexión y la ley de la refracción.
Rayo incidente, refractado y reflejado están en un mismo plano.
Independencia de los rayos luminosos. La acción de cada rayo es independiente de la de los demás.
Imaginar que se toma una foto de una escena que contiene un objeto con un paisaje de fondo; a
continuación, se tapa el objeto y se vuelve a fotografiar; esta segunda foto permite comprobar que, al
tapar el objeto, sólo se han bloqueado los rayos que proceden de él, sin que se vea afectado el resto,
por lo que los demás rayos volverán a formar la imagen del paisaje tal y como se apreciaba en la primera
fotografía.
2
Las trayectorias de la luz son reversibles.
Sistemas formadores de imágenes (SFI) por reflexión y/o por refracción
Un sistema óptico formador de imágenes por reflexión y/o por refracción es un conjunto de superficies
refractoras y/o reflectoras dispuestas a lo largo de la trayectorias del haz luminoso. El sistema es
centrado si todas las superficies que lo conforman son de revolución, con un eje de revolución común para
todas, al cual se le denomina eje óptico, Figura 1.
Figura 1
El SFI es sencillo cuando está formado por una sola superficie y es compuesto si contiene varias
superficies de separación de medios (láminas transparentes, prismas ópticos, lentes delgadas,...). La
complejidad de los sistemas ópticos aumenta cuando se conforman asociaciones de lentes, prismas, espejos,
etc., como por ejemplo en los denominados instrumentos ópticos: microscopios, telescopios, binóculos entre
otros.
¿Qué es una imagen óptica?
Una imagen óptica es una figura formada por el conjunto de puntos donde convergen los rayos que
provienen de fuentes puntuales del objeto tras su interacción con el sistema óptico.
Espacios ópticos
Dada un SFI, se denomina espacio objeto (EO) de donde viene la luz y espacio imagen (EI) hacia donde va la
luz después de interactuar con el SFI. Es decir si se supone la luz incidiendo desde la izquierda, para un
SFI de refracción (o de transmisión) el EO está a la izquierda del SFI y el EI a la derecha; si es un SFI de
reflexión el EO y el EI estarán ambos a la izquierda de éste.
Tipos de imágenes y objetos
Las imágenes y los objetos se pueden clasificar en reales y virtuales. Se pueden distinguir observando la
divergencia o convergencia de los rayos. Para comprender esto se asumirán objetos (O) e imágenes (O’)
puntuales: en los objetos reales los rayos divergen desde O; en los objetos virtuales los rayos convergen en
sus prolongaciones hacia O; en las imágenes reales los rayos convergen hacia O’ y luego divergen de ésta
(es decir los rayos atraviesan la imagen); en las imágenes virtuales los rayos divergen en sus
prolongaciones desde la imagen O’. En las Figuras 2 (a), (b), (c) y (d) se ilustran las posibles combinaciones
de objetos e imágenes en los SFI. En el caso del objeto virtual, se puede obtener como la imagen de un
primer SFI, Figura 3. Como se puede concluir las imágenes reales se pueden proyectar en una pantalla

3
debido a que allí hay convergencia de energía. En cambio esto no es posible con las imágenes virtuales.
También se debe observar que las imágenes y los objetos reales están en su espacio (espacio imagen y
objeto respectivamente) mientras que los virtuales no.
Figura 2 (a): Objeto real e imagen real
Figura 2 (b): Objeto real e imagen virtual
Figura 2 (c): Objeto virtual e imagen real
Figura 2 (d): Objeto virtual e imagen virtual
4
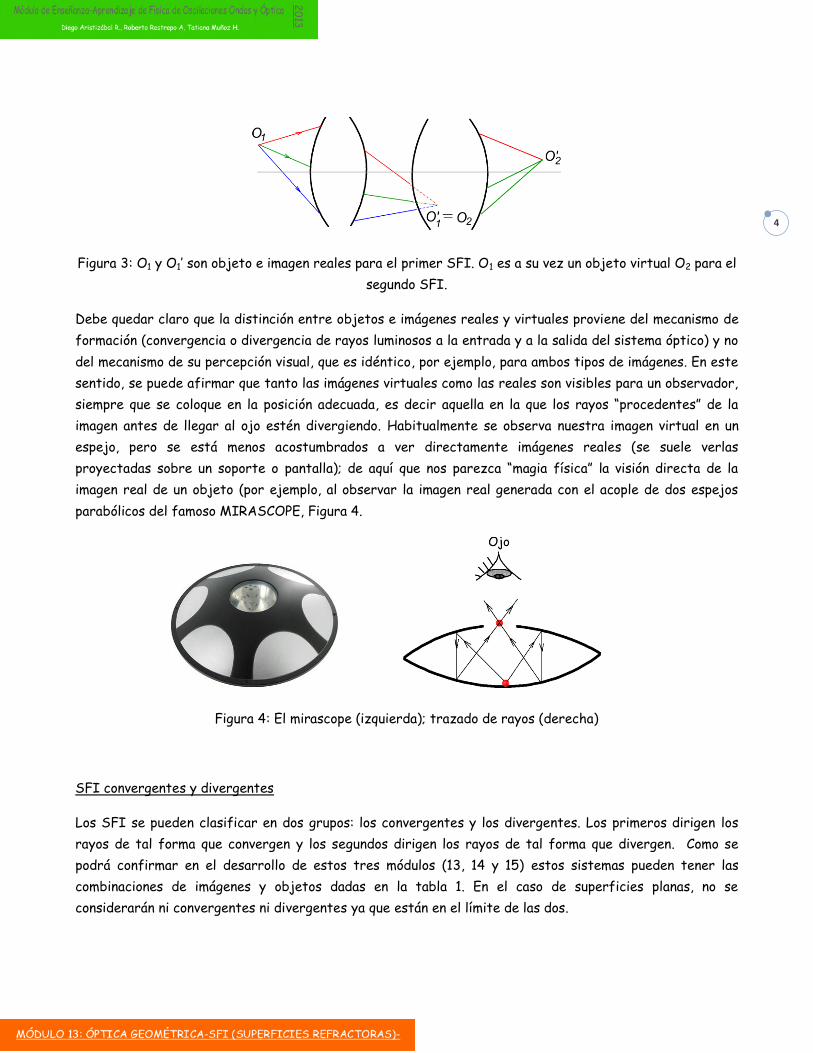
Figura 3: O1 y O1’ son objeto e imagen reales para el primer SFI. O1 es a su vez un objeto virtual O2 para el
segundo SFI.
Debe quedar claro que la distinción entre objetos e imágenes reales y virtuales proviene del mecanismo de
formación (convergencia o divergencia de rayos luminosos a la entrada y a la salida del sistema óptico) y no
del mecanismo de su percepción visual, que es idéntico, por ejemplo, para ambos tipos de imágenes. En este
sentido, se puede afirmar que tanto las imágenes virtuales como las reales son visibles para un observador,
siempre que se coloque en la posición adecuada, es decir aquella en la que los rayos “procedentes” de la
imagen antes de llegar al ojo estén divergiendo. Habitualmente se observa nuestra imagen virtual en un
espejo, pero se está menos acostumbrados a ver directamente imágenes reales (se suele verlas
proyectadas sobre un soporte o pantalla); de aquí que nos parezca “magia física” la visión directa de la
imagen real de un objeto (por ejemplo, al observar la imagen real generada con el acople de dos espejos
parabólicos del famoso MIRASCOPE, Figura 4.
Figura 4: El mirascope (izquierda); trazado de rayos (derecha)
SFI convergentes y divergentes
Los SFI se pueden clasificar en dos grupos: los convergentes y los divergentes. Los primeros dirigen los
rayos de tal forma que convergen y los segundos dirigen los rayos de tal forma que divergen. Como se
podrá confirmar en el desarrollo de estos tres módulos (13, 14 y 15) estos sistemas pueden tener las
combinaciones de imágenes y objetos dadas en la tabla 1. En el caso de superficies planas, no se
considerarán ni convergentes ni divergentes ya que están en el límite de las dos.
5
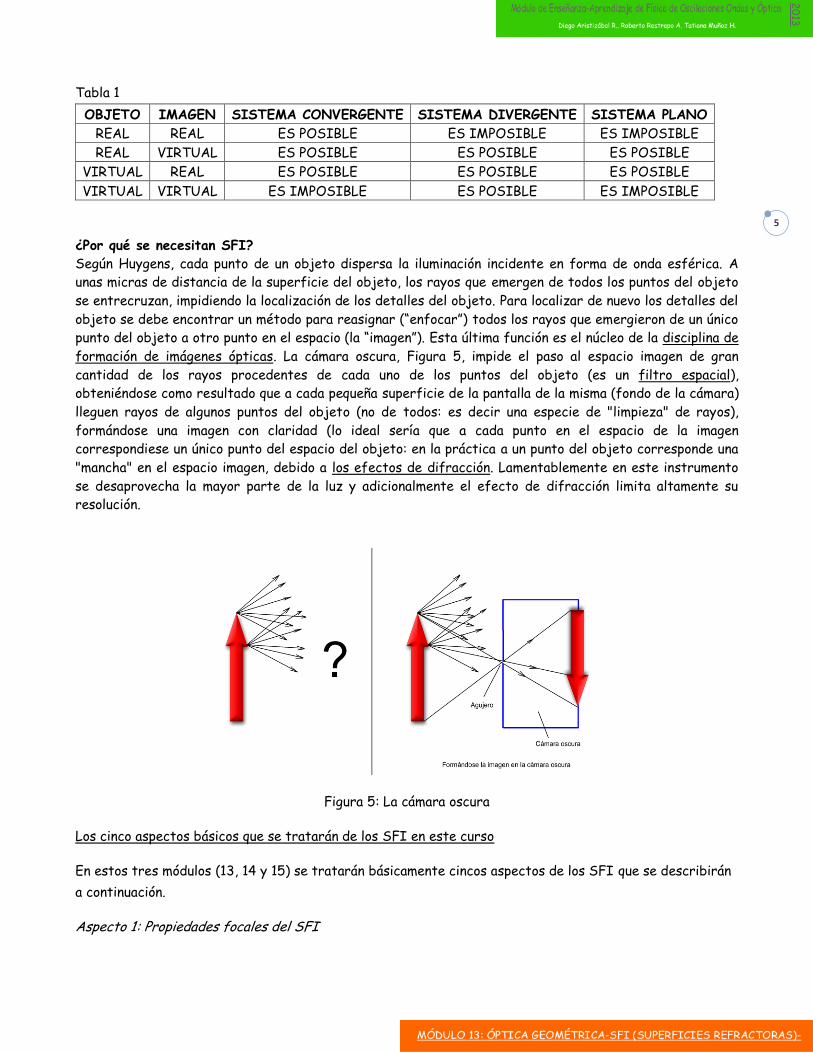
Tabla 1
OBJETO IMAGEN SISTEMA CONVERGENTE SISTEMA DIVERGENTE SISTEMA PLANO
REAL REAL ES POSIBLE ES IMPOSIBLE ES IMPOSIBLE
REAL VIRTUAL ES POSIBLE ES POSIBLE ES POSIBLE
VIRTUAL REAL ES POSIBLE ES POSIBLE ES POSIBLE
VIRTUAL VIRTUAL ES IMPOSIBLE ES POSIBLE ES IMPOSIBLE
¿Por qué se necesitan SFI?
Según Huygens, cada punto de un objeto dispersa la iluminación incidente en forma de onda esférica. A
unas micras de distancia de la superficie del objeto, los rayos que emergen de todos los puntos del objeto
se entrecruzan, impidiendo la localización de los detalles del objeto. Para localizar de nuevo los detalles del
objeto se debe encontrar un método para reasignar (“enfocar”) todos los rayos que emergieron de un único
punto del objeto a otro punto en el espacio (la “imagen”). Esta última función es el núcleo de la disciplina de
formación de imágenes ópticas. La cámara oscura, Figura 5, impide el paso al espacio imagen de gran
cantidad de los rayos procedentes de cada uno de los puntos del objeto (es un filtro espacial),
obteniéndose como resultado que a cada pequeña superficie de la pantalla de la misma (fondo de la cámara)
lleguen rayos de algunos puntos del objeto (no de todos: es decir una especie de "limpieza" de rayos),
formándose una imagen con claridad (lo ideal sería que a cada punto en el espacio de la imagen
correspondiese un único punto del espacio del objeto: en la práctica a un punto del objeto corresponde una
"mancha" en el espacio imagen, debido a los efectos de difracción. Lamentablemente en este instrumento
se desaprovecha la mayor parte de la luz y adicionalmente el efecto de difracción limita altamente su
resolución.
Figura 5: La cámara oscura
Los cinco aspectos básicos que se tratarán de los SFI en este curso
En estos tres módulos (13, 14 y 15) se tratarán básicamente cincos aspectos de los SFI que se describirán
a continuación.
Aspecto 1: Propiedades focales del SFI

6
¿Cuáles son las propiedades focales del sistema? Hay otras formas equivalentes de hacer esta pregunta:
¿Qué forma debe tener la superficie (o superficies) del sistema para que rayos paralelos sean desviados
por el sistema de tal forma que converjan a un punto (que se denominará foco imagen del sistema)? ¿Qué
forma debe tener la superficie (o superficies) del sistema para que la imagen formada por este sistema de
un objeto ubicado en el infinito (es decir muy lejos del sistema) se forme en el denominado plano focal imagen?
Aspecto 2: Fórmula de Gauss de las SFI
¿Cuál es la expresión algebraica que relaciona el radio R (o radios, R1 y R2) de curvatura de la(s)
superficie(s) del sistema y las distancias imagen y objeto, s y s’ ? Esta se conoce como fórmula de Gauss en
la que se llamará aproximación paraxial.
Aspecto 3: Ecuación del constructor de las SFI
¿Cuál es la expresión algebraica que relaciona el radio R (o radios, R1y R2) de curvatura de las superficies
del sistema óptico con la distancia focal, f, ( o distancias focales objeto e imagen, f y f’ ) del sistema? Esta
expresión es la denominada ecuación del constructor del sistema óptico.
Aspecto 4: Trazado de imágenes en las SFI
¿Cuál es la trayectoria de los tres rayos principales (rayo paralelo al eje óptico, rayo que pasa por el foco objeto, rayo que pasa por el centro del sistema al salir del sistema óptico? Es decir, ¿cómo explicar la
formación de imágenes mediante el trazado de rayos principales?
Aspecto 5: Aumento en las SFI
¿Cuál es el aumento del sistema óptico?
Superficies refractoras esféricas (SRE)
Una SRE es un sistema óptico simple que separa dos medios de índice de refracción n y n’; también
denominado dióptrio esférico, Figura 6. Primero se definirá el vocabulario básico, luego se expondrá las
denominadas normas DIN (Deustcer Industrie Normes -Normas de la Industria Alemana-) 1335 y por
último se obtendrán las expresiones que rigen las SRE a través de la respuestas a las cinco aspectos
básicas de los sistemas ópticos en el contexto de la óptica geométrica.
Definiciones básicas en la SER
Centro y radio de curvatura: Centro C y radio R del casquete esférico correspondiente a la SRE.
Vértice: Punto medio de la SRE.
Distancia objeto (s): Distancia del objeto al vértice de la SRE.
Eje óptico: Recta que pasa por el vértice y el centro de curvatura de la SRE.
Distancia imagen (s’ ): Distancia de la imagen al vértice de la SRE.
Altura del objeto (y): Altura del objeto medida desde el eje óptico.
Altura de la imagen (y’ ): Altura de la imagen medida desde el eje óptico.

7
Figura 6
Aumento o magnificación lateral (M): Relación entre la altura de la imagen y la altura del objeto, ecuación
[1].
y'M = [1]
y
Normas DIN 1335
Las letras que hacen referencia a la imagen son las mismas que las referidas al objeto, pero con
"prima". Por ejemplo, si el tamaño del objeto es y, el tamaño de la imagen es y’.
Las figuras se dibujan de modo que la luz incidente procede de la izquierda y se propaga hacia la
derecha.
Las magnitudes lineales se consideran negativas hacia la izquierda del vértice del dióptrio (punto CERO)
y positivas a la derecha; es decir, como si el vértice estuviera situado en el origen de coordenadas. En
el caso ilustrado en la figura 6, s es negativa, s’ es positiva y R es positiva.
Las distancias al eje óptico se cuentan a partir de él y son positivas si están por encima del eje y
negativas si están por debajo. Por ejemplo, en el caso ilustrado en la figura 6, y es positiva, y’ es
negativa.
Los ángulos de incidencia y de refracción de un rayo son positivos si para hacer coincidir el rayo con la
normal a la superficie por el camino más corto hay que girarlo en el sentido horario. En caso contrario
el ángulo es negativo.
El ángulo formado por un rayo o por la normal con el eje óptico es positivo, si para hacer coincidir el
rayo o la normal con el eje por el camino más corto hay que hacer un giro en sentido anti-horario. En
caso contrario, el ángulo es negativo.
Aspecto 1: Propiedades focales de las SR
¿Qué forma debe tener una superficie refractora (SR) para que rayos paralelos sean desviados por
refracción de tal forma que converjan a un punto (que se denominará foco imagen del sistema, F’ )?
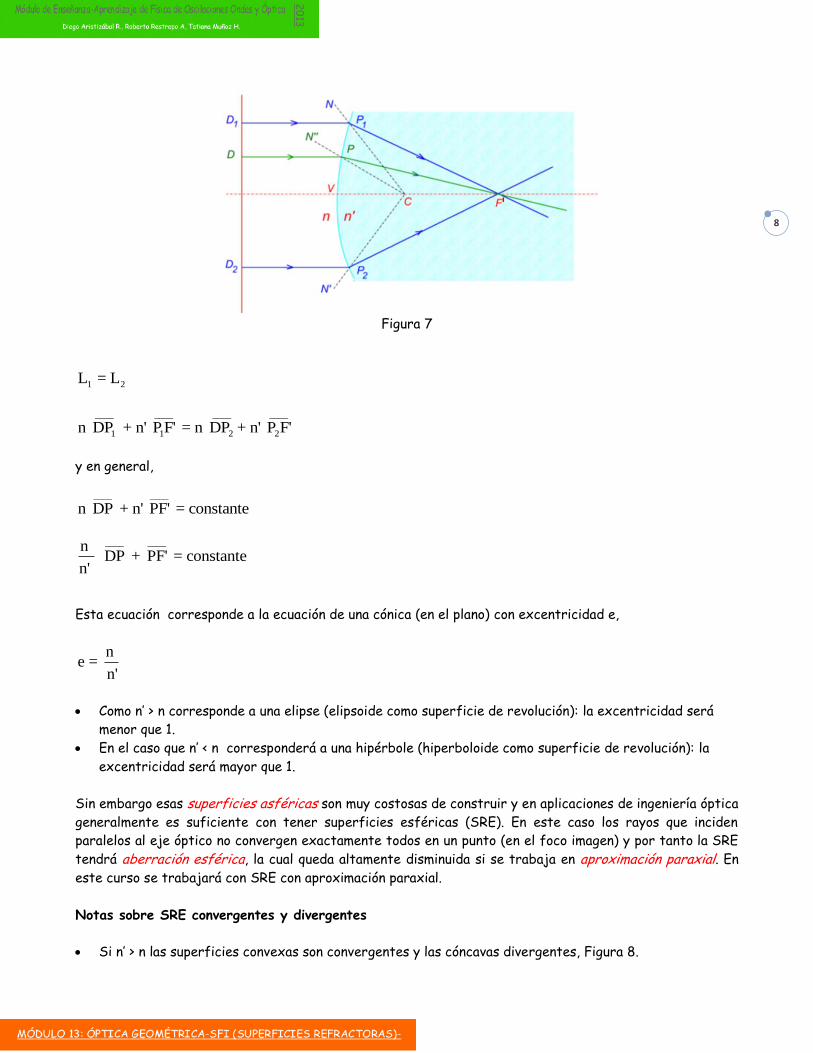
Para el análisis se supondrá una superficie convexa y n’ > n. Los caminos ópticos L seguidos por los rayos 1 y
2 que inciden paralelos al eje óptico y pasan por el denominado foco imagen deben ser iguales, Figura 7.
8
Figura 7
1 2L = L
____ ____ ____ ____
1 1 2 2n DP + n' P F' = n DP + n' P F'
y en general,
____ ____
n DP + n' PF' = constante
____ ____n
DP + PF' = constante n'
Esta ecuación corresponde a la ecuación de una cónica (en el plano) con excentricidad e,
n e =
n'
Como n’ > n corresponde a una elipse (elipsoide como superficie de revolución): la excentricidad será
menor que 1.
En el caso que n’ < n corresponderá a una hipérbole (hiperboloide como superficie de revolución): la
excentricidad será mayor que 1.
Sin embargo esas superficies asféricas son muy costosas de construir y en aplicaciones de ingeniería óptica
generalmente es suficiente con tener superficies esféricas (SRE). En este caso los rayos que inciden
paralelos al eje óptico no convergen exactamente todos en un punto (en el foco imagen) y por tanto la SRE
tendrá aberración esférica, la cual queda altamente disminuida si se trabaja en aproximación paraxial. En
este curso se trabajará con SRE con aproximación paraxial.
Notas sobre SRE convergentes y divergentes
Si n’ > n las superficies convexas son convergentes y las cóncavas divergentes, Figura 8.

9
Si n’ < n las superficies cóncavas son convergentes y las convexas divergentes, Figura 9.
En este curso se supondrá, por defecto, n’ > n.
Figura 8: SRE, n’ > n
Figura 9: SRE, n’ < n
Foco imagen real: En una SRE convergente los rayos que inciden paralelos al eje óptico al refractarse en
la superficie convergen realmente a un punto denominado foco imagen, F’ (este foco es real). Si se ubica un
objeto puntual P∞ en el infinito sobre el eje óptico, su imagen P’ es real y queda ubicada sobre el foco
imagen. A la distancia entre el foco imagen y el vértice de la SRE se le denomina distancia focal imagen, f’ ,
Figura 10 izquierda.
Adicionalmente, si se ubica un objeto puntual P∞ en el infinito y fuera del eje óptico, su imagen P’ es real y
quedara ubicada fuera del eje óptico y un plano denominado plano focal imagen. Este plano es perpendicular
al eje óptico y lo corta por el punto focal F’, Figura 10 derecha.
Figura 10
Foco objeto real: En una SRE convergente los rayos que inciden realmente por un punto denominado el
foco objeto F al refractarse en la superficie emergen paralelos al eje óptico (este foco es real). Si se
ubica un objeto puntual P en el foco objeto, su imagen es real y queda ubicada en el infinito, P∞, pero sobre

10
el eje óptico. A la distancia entre el foco objeto y el vértice de la SRE se le denomina distancia focal objeto, f , figura 11 izquierda.
Adicionalmente, si se ubica un objeto puntual P en el denominado plano focal objeto pero fuera del eje
óptico, su imagen será real y quedará ubicada en el infinito, P∞, fuera del eje óptico. El plano focal objeto
es perpendicular al eje óptico y lo corta por el punto focal F, Figura 11 derecha.
Figura 11
Foco imagen virtual: En una SRE divergente los rayos que inciden paralelos al eje óptico al refractarse en
la superficie divergen, de tal forma que sus prolongaciones convergen virtualmente a un punto denominado
foco imagen, F’ (este foco es virtual). Si se ubica un objeto puntual en el infinito, P∞, sobre el eje óptico, su
imagen P’ es virtual y quedará ubicada sobre el foco imagen. A la distancia entre el foco imagen y el vértice
de la SRE se le denomina distancia focal imagen, f ’, Figura 12 izquierda.
Adicionalmente, si se ubica un objeto puntual en el infinito pero fuera del eje óptico, P∞, su imagen P’ es
virtual y quedará ubicada en el denominado plano focal imagen y fuera del eje óptico. Este plano es
perpendicular al eje óptico y lo corta por el punto focal F’, Figura 12 derecha.
Figura 12
Foco objeto virtual: En una SRE divergente los rayos que inciden virtualmente (es decir sus
prolongaciones) por el denominado foco objeto F, al refractarsen en la superficie divergen, de tal forma
que emergen paralelos al eje óptico (este foco es virtual). Si se ubica un objeto puntual virtual en el foco

11
objeto, su imagen será real y se ubicará en el infinito sobre el eje óptico. A la distancia entre el foco
objeto y el vértice de la SER se le denomina distancia focal objeto, f , Figura 13 izquierda.
Adicionalmente, si se ubica un objeto virtual puntual en el denominado plano focal objeto pero fuera del eje
óptico, su imagen será real y quedará ubicada en el infinito y fuera del eje óptico. Este plano es
perpendicular al eje óptico y lo corta por el punto focal F, Figura 13 derecha.
Figura 13
Aspecto 2: Fórmula de Gauss de las SRE
Se trata de encontrar la relación entre s, s’ y R bajo aproximación paraxial, Figura 14.
Figura 14
Del triángulo APC se obtiene,

12
φ = α + β
Del triángulo AP'C se obtiene,
β = φ' + α'
Aplicando la convención DIN para ángulos, se tiene que: > 0, ’ > 0, < 0, ’ > 0 y > 0, por tanto las dos
ecuaciones se reescriben así:
φ = β - α (1)
φ' = β - α' (2)
Aplicando la ley de Snell,
sen φ n' =
sen φ' n
Esta ecuación para aproximación paraxial se reescribe así,
n' φ' = n φ (3)
Combinando las ecuaciones (1), (2) y (3) se obtiene y teniendo en cuenta que α tanα , β tanβ ,
α' tanα' , x 0 , se obtiene,
n' n n' - n - = [2]
s' s R
que corresponde a la fórmula de Gauss para SRE.
Análisis gráfico de la fórmula de Gauss para SRE
En la Figura 15 se observa la gráfica n’/s’ VS n/s correspondiente a la ecuación [2]. Se confirma lo
afirmado en la Tabla 1.
Tabla 1
OBJETO IMAGEN SISTEMA CONVERGENTE SISTEMA DIVERGENTE SISTEMA PLANO
REAL REAL ES POSIBLE ES IMPOSIBLE ES IMPOSIBLE
REAL VIRTUAL ES POSIBLE ES POSIBLE ES POSIBLE
VIRTUAL REAL ES POSIBLE ES POSIBLE ES POSIBLE
VIRTUAL VIRTUAL ES IMPOSIBLE ES POSIBLE ES IMPOSIBLE

13
Figura 15
Ejemplo 1:
Una moneda reposa en el fondo de una piscina de profundidad h e índice de refracción n. Demostrar que los
rayos que están cerca de la normal parecen provenir de un punto s’ = h/n bajo la superficie. Esta distancia
es la profundidad aparente de la piscina.
Solución:
En la Figura 16 izquierda se ilustra una representación de la escena física. En la Figura 16 derecha se
ilustra el trazado de la trayectoria de dos rayos para estimar la imagen y los ejes xy del sistema
coordenado con origen en el vértice del sistema óptico de acuerdo a las normas de la DIN.
Figura 16
La fórmula de Gauss para la SRE es,

14
n' n n' - n - =
s' s R
El objeto es real ya que se encuentra en el espacio objeto, por lo tanto s = -h (norma DIN).
La SRE es plana, por lo tanto R tiende a infinito.
n’=1,00 (aire)
Reemplazando estos datos en la fórmula de Gauss se obtiene,
hs' = -
n
Es decir la imagen es virtual y se encuentra en un punto s’ = h/n bajo la superficie.
Ejemplo 2:
Una moneda de 2,00 cm de diámetro está situada en el interior de una bola maciza de cristal de radio igual
a 30,0 cm, Figura 17. El índice de refracción de la bola es n=1,50 y la moneda está a 20,0 cm de la
superficie de ésta. Hallar la posición de la imagen.
Solución:
En la Figura 17 izquierda se ilustra una representación de la escena física. En la Figura 17 derecha se
ilustra los ejes xy del sistema coordenado con origen en el vértice del sistema óptico de acuerdo a las
normas de la DIN.
Figura 17
La solución que se presenta a continuación es analítica empleando la fórmula de Gauss. En una sección
posterior se presenta la solución mediante análisis gráfico usando el trazado de rayos principales.
La fórmula de Gauss para la SRE es,
n' n n' - n - =
s' s R
15
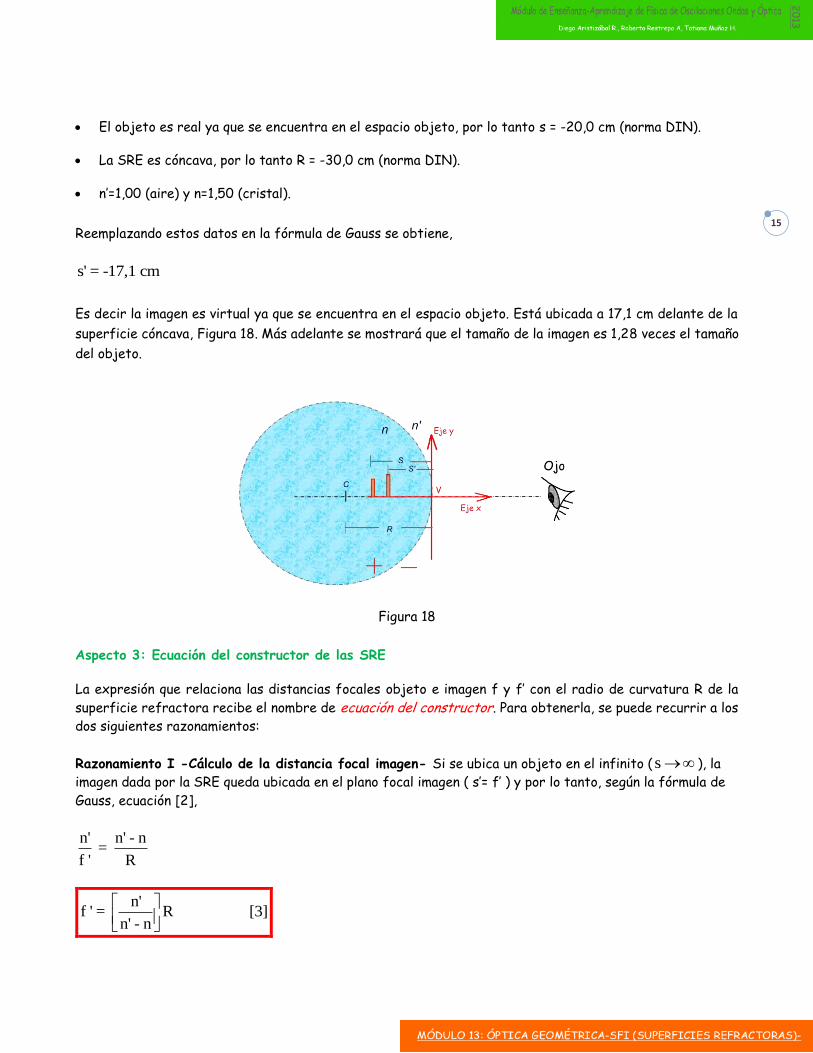
El objeto es real ya que se encuentra en el espacio objeto, por lo tanto s = -20,0 cm (norma DIN).
La SRE es cóncava, por lo tanto R = -30,0 cm (norma DIN).
n’=1,00 (aire) y n=1,50 (cristal).
Reemplazando estos datos en la fórmula de Gauss se obtiene,
s' = -17,1 cm
Es decir la imagen es virtual ya que se encuentra en el espacio objeto. Está ubicada a 17,1 cm delante de la
superficie cóncava, Figura 18. Más adelante se mostrará que el tamaño de la imagen es 1,28 veces el tamaño
del objeto.
Figura 18
Aspecto 3: Ecuación del constructor de las SRE
La expresión que relaciona las distancias focales objeto e imagen f y f’ con el radio de curvatura R de la
superficie refractora recibe el nombre de ecuación del constructor. Para obtenerla, se puede recurrir a los
dos siguientes razonamientos:
Razonamiento I -Cálculo de la distancia focal imagen- Si se ubica un objeto en el infinito (s ), la
imagen dada por la SRE queda ubicada en el plano focal imagen ( s’= f’ ) y por lo tanto, según la fórmula de
Gauss, ecuación [2],
n' n' - n =
f ' R
n'f ' = R [3]
n' - n

16
Razonamiento II -Cálculo de la distancia focal objeto- Si el objeto se ubica en el foco objeto (s = f ), la
imagen dada por la SRE queda ubicada en el infinito ( s' ), y por tanto, según la fórmula de Gauss,
ecuación [2],
n n' - n =
f R
nf = - R [4]
n' - n
De las ecuaciones [3] y [4] se obtiene,
f n = - [5]
f ' n'
Si n’ > n y la superficie es convexa (SRE convergente),
R > 0 (norma DIN).
puede concluirse de las ecuaciones [3] y [4] que f < 0 y f’ > 0. Por lo tanto el foco objeto F está ubicado
en el espacio objeto y el foco imagen F’ está ubicado en el espacio imagen. Es decir cada foco se
encuentra ubicado es su propio espacio y por lo tanto son focos REALES.
Si n’ > n y la superficie es cóncava (SRE divergente),
R < 0 (norma DIN).
puede concluirse de las ecuaciones [3] y [4] que f > 0 y f’ < 0. Por lo tanto el foco objeto F está ubicado
en el espacio imagen y el foco imagen F’ está ubicado en el espacio objeto. Es decir los focos no se
encuentran en sus espacios y por lo tanto son focos VIRTUALES.
Si n’ < n y la superficie es convexa (SRE divergente),
R > 0 (norma DIN).
puede concluirse de las ecuaciones [3] y [4] que f > 0 y f’ < 0. Por lo tanto el foco objeto F está ubicado
en el espacio imagen y el foco imagen F’ está ubicado en el espacio objeto. Es decir los focos no se
encuentran en sus espacios y por lo tanto son focos VIRTUALES.
Si n’ < n y la superficie es cóncava (SRE convergente),
R < 0 (norma DIN).
puede concluirse de las ecuaciones [3] y [4] que f < 0 y f’ > 0. Por lo tanto el foco objeto F está ubicado
en el espacio objeto y el foco imagen F’ está ubicado en el espacio imagen. Es decir cada foco se
encuentra ubicado es su propio espacio y por lo tanto son focos REALES.
Observar que los focos de las SRE convergentes son REALES y de las divergentes son VIRTUALES.
17
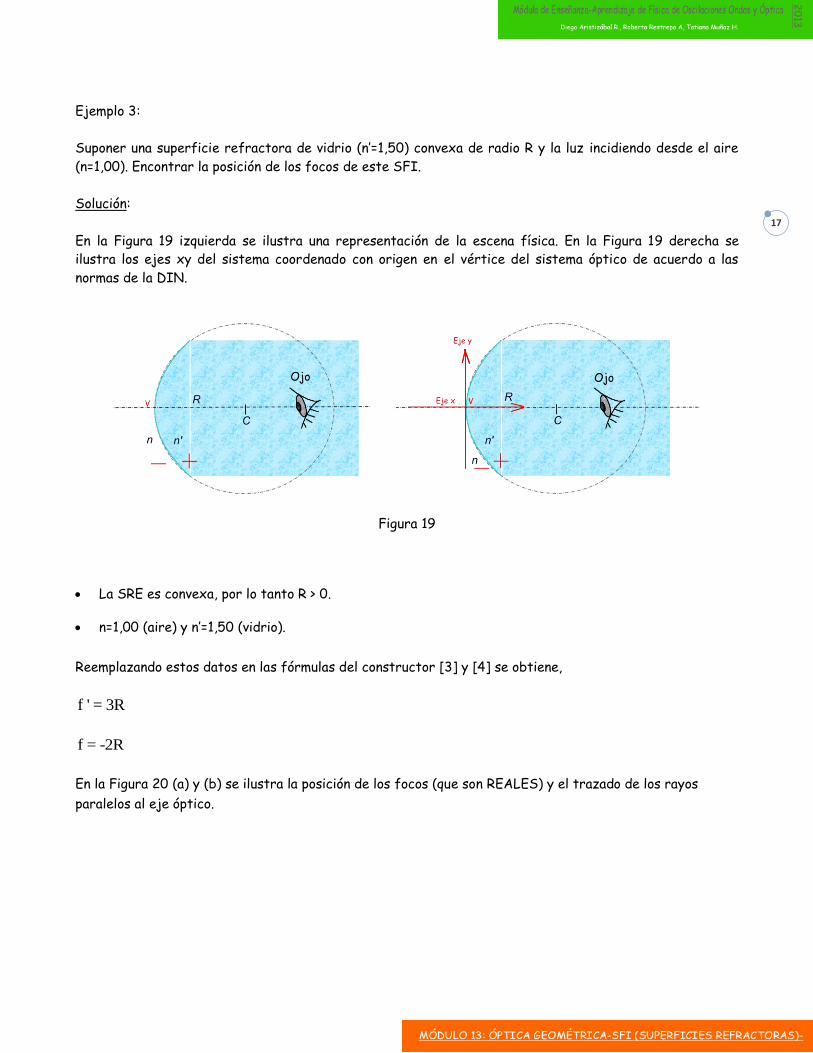
Ejemplo 3:
Suponer una superficie refractora de vidrio (n’=1,50) convexa de radio R y la luz incidiendo desde el aire
(n=1,00). Encontrar la posición de los focos de este SFI.
Solución:
En la Figura 19 izquierda se ilustra una representación de la escena física. En la Figura 19 derecha se
ilustra los ejes xy del sistema coordenado con origen en el vértice del sistema óptico de acuerdo a las
normas de la DIN.
Figura 19
La SRE es convexa, por lo tanto R > 0.
n=1,00 (aire) y n’=1,50 (vidrio).
Reemplazando estos datos en las fórmulas del constructor [3] y [4] se obtiene,
f ' = 3R
f = -2R
En la Figura 20 (a) y (b) se ilustra la posición de los focos (que son REALES) y el trazado de los rayos
paralelos al eje óptico.

18
Figura 20 (a): F’, Foco imagen (REAL)
Figura 20 (b): F, Foco objeto (REAL)
Ejemplo 4:
Suponer una superficie refractora de aire (n’=1,00) cóncava de radio R y la luz incidiendo desde el vidrio
(n=1,50). Encontrar la posición de los focos de este SFI.
Solución:
En la Figura 21 izquierda se ilustra una representación de la escena física. En la Figura 21 derecha se
ilustra los ejes xy del sistema coordenado con origen en el vértice del sistema óptico de acuerdo a las
normas de la DIN.
Figura 21

19
La SRE es cóncava, por lo tanto R < 0.
n=1,50 (vidrio) y n’=1,00 (aire).
Reemplazando estos datos en las fórmulas del constructor [3] y [4] se obtiene,
f ' = 2R
f = -3R
En los resultados ya se incluyó el signo menos del radio. En la Figura 22 (a) y (b) se ilustra la posición de los
focos (que son REALES) y el trazado de los rayos paralelos al eje óptico.
Figura 22 (a): F’, Foco imagen (REAL)
Figura 22 (b): Foco objeto (REAL)
Aspecto 4: Trazado de imágenes en las SRE
Los tres rayos notables de una SRE son,
Rayo 1 Rayo que incide paralelamente al eje óptico refracta en la SRE real o virtualmente por el foco
imagen F’.

20
Rayo 2 Rayo que incide real o virtualmente por el foco objeto F refracta en la SRE paralelo al eje
óptico.
Rayo 3 Rayo que incide en la dirección del centro de curvatura, no cambia de dirección en la refracción
en la SRE.
Formación de imágenes Para formar la imagen de un objeto puntual basta con trazar la trayectoria
seguida por sólo dos rayos, y donde se corten REAL o VIRTUALMENTE queda ubicada la imagen puntual
correspondiente. Es útil emplear dos de los tres rayos notables. En la Figura 23 se ilustran 2 ejemplos de
imágenes dadas por las SRE convexas (convergentes): arriba el resultado es una imagen REAL y abajo el
resultado es una imagen VIRTUAL y de mayor tamaño que el objeto. En la figura 24 se ilustra un ejemplo
de la imagen formada por una SRE cóncava (divergente), es VIRTUAL y de menor tamaño que el objeto. En
estos ejemplos se supuso que el medio de la izquierda es aire (n=1,00) y el de la derecha vidrio (n’=1,50).
Es importante anotar que:
los sistemas convergentes pueden dar de objetos reales, imágenes reales de mayor, menor o igual
tamaño que el objeto y también imágenes virtuales mayores que el objeto; incluso tienen un punto ciego
(el foco objeto).
los sistemas divergentes sólo pueden dar de objetos reales imágenes virtuales de menor tamaño que el
objeto. sólo las imágenes reales se pueden proyectar en una pantalla.
el ojo humano está diseñado para converger rayos que estén divergiendo y enfocarlos en la retina. Por
tanto, es capaz de detectar con suma comodidad las imágenes virtuales (convirtiéndolas en reales
proyectadas en la retina). Para detectar imágenes reales se debe ubicar en una región en la que los
rayos provenientes de la imagen estén divergiendo; lo mejor en este caso es proyectarlos en una
pantalla para que su reflexión en ésta los convierta en divergentes y por tanto registrables
cómodamente en la retina del ojo.
Figura 23: Dos ejemplos de imágenes dadas por SRE convergente.
Arriba imagen REAL, abajo imagen VIRTUAL. El objeto es REAL

21
Figura 24: Imagen VIRTUAL dada por SRE divergente. El objeto es REAL
Simulaciones:
Analizar las simulaciones de SimulPhysics correspondientes a las SRE convexas y cóncavas. Para
acceder a ellas hacer clic con el mouse en los ítems señalados en las Figuras 25 y 26. En éstas hacer
las variaciones permitidas y observar detenidamente los resultados.
http://ludifisica.medellin.unal.edu.co/index.php/software-hardware/simulphysics
Figura 25: Acceso a la simulación sobre SRE convexas

22
Figura 26: Acceso a la simulación sobre SRE cóncavas
Ejemplo 5:
Hacer la construcción gráfica de la imagen del ejemplo 2.
Solución:
En la Figura 27 se ilustra la construcción gráfica de la imagen del ejemplo 2. Para esto se tuvo en cuenta
que la SRE es convergente y se emplearon dos rayos principales: el rayo que incide paralelo al eje óptico
que refracta por el foco imagen F’ y el rayo que incide pasando por el centro de curvatura que refracta sin
desviarse. La imagen obtenida es virtual y es de mayor tamaño que el objeto real.
Figura 27
Aspecto 5: Aumento en las SRE
El aumento lateral de un SFI se define según la ecuación [1],

23
y'M =
y
Aplicando la ley de Snell en el vértice V, Figura 28, se obtiene,
sen φ n' =
sen φ' n
Figura 28
En aproximación paraxial, senφ tanφ y senφ' tanφ' y por lo tanto,
tan φ n' =
tan φ' n
De la trigonometría y de las normas DIN,
n' =
' n
'
y
sy
s
' n' =
' n
s y
sy
' n s'M = = [6]
n' s
y
y
De esta expresión se concluye que,
Las imágenes REALES de objetos REALES son invertidas.
Las imágenes VIRTUALES de objetos REALES son derechas.

24
Ejemplo 6:
Demostrar que el aumento de SRE plana es +1.
Solución:
Una SRE plana tiene radio infinito ( R ) . Reemplazando en la ecuación de Gauss se obtiene,
n' n - = 0
s' s
Por lo tanto,
n' s = n s'
Al reemplazar este resultado en la ecuación del aumento, ecuación [6], se obtiene,
M = +1
Es decir, si el objeto es real la imagen obtenida es virtual y de igual tamaño que el objeto.
Ejemplo 7:
Una varilla cilíndrica de vidrio en el aire tiene un índice de refracción de 1,52. Un extremo de la varilla
tiene forma esférica conexa con radio de 2,00 cm, calcular: (a) la distancia imagen de objeto situado en el
eje de la varilla ubicado 8,00 cm a la izquierda del vértice, (b) el aumento lateral, (c) la altura de la imagen
si el objeto tiene una altura 2,00 cm. Resolver analítica y gráficamente.
Solución:
En la Figura 29 se ilustra la escena física y los ejes xy correspondientes.
Figura 29
Solución:
(a) Con base en las normas DIN se tiene: R = +2,00 cm, s = -8,00 cm, n= 1,00 y n’ = 1,52. Para calcular la
distancia imagen se emplea la ecuación de Gauss,

25
n' n n' - n
- = s' s R
Reemplazando los valores se obtiene,
s' = +11,3cm
El objeto y la imagen son reales ya que se encuentran en sus respectivos espacios (espacio objeto y espacio
imagen).
A continuación se hará la solución gráfica. Para lograr esto es necesario primero calcular la ubicación de los
focos. Las ecuaciones a usar son las del constructor, [3] y [4].
n'f ' = R [3]
n' - n
nf = - R [4]
n' - n
Reemplazando los valores se obtiene,
f ' = +5,85 cm
f = -3,85 cm
Es decir son focos reales. En la Figura 29 se ilustra la construcción gráfica de la imagen. Para el trazado de
la imagen se emplearon dos rayos principales: el rayo que incide paralelamente al eje óptico que refracta
por el foco imagen F’ y el rayo que incide en la dirección del centro de curvatura el cual se refracta sin
desviarse. La imagen formada es real y que se ubica en el espacio imagen.
Figura 29
(b) El aumento lateral se calcula empleando la ecuación [6].
n s'M = [6]
n' s
Reemplazando los valores se obtiene,

26
M = -0,93
es decir la imagen es invertida.
(c) La altura de la imagen se calcula empleando la definición de aumento,
y'M =
y
Reemplazando los valores se obtiene,
y'= M y
y' = -0,93 2 cm -1,86 cm
Es decir su altura es igual a 1,86 cm pero es invertida (norma DIN).
Taller
1. Completar la Tabla 1 para superficies de refracción esféricas (SRE) bajo aproximación paraxial. Todas
las distancias están en mm. R es el radio de curvatura, s la distancia objeto, s’ la distancia imagen, f la
distancia focal objeto, f’ la distancia focal imagen. Tomar n=1,00 y n’=1,50. Resolver analítica y
gráficamente.
Tabla 1
TIPO R s s’ f f’
Sistema
convergente
o
divergente
Focos
reales o
virtuales
¿Imagen
real o
virtual?
Aumento
CÓNCAVA -90 -15
PLANA -300
CONVEXA 120 -480
CÓNCAVA -480 -120
-96 96
2. Uno de los extremos de una varilla de vidrio (n’=1,50) tiene forma de una superficie convexa de radio
6.00 cm. Se coloca un objeto en el aire en un punto sobre el eje de la varilla. Determinar las posiciones
de la imagen cuando el objeto se encuentra a: (a) 20.0 cm, (b) 10.0 cm y (c) 3.00 cm, del extremo de la
varilla. (d) Determinar las distancias focales de la superficie refractora. Repetir los cálculos
suponiendo que la superficie del extremo es cóncava.
FIN.





























