Embed Size (px)
Citation preview

1
UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
FACULTAD DE CIENCIAS-ESCUELA DE FÍSICA
FÍSICA DE OSCILACIONES ONDAS Y ÓPTICA
MÓDULO # 9: ONDAS MECÁNICAS –DINÁMICA- Diego Luis Aristizábal R., Roberto Restrepo A., Tatiana Muñoz H.
Profesores, Escuela de Física de la Universidad Nacional de Colombia Sede Medellín
Temas
Introducción
La ley de Hooke generalizada para medios continuos
La ecuación diferencial de onda de orden 2 generalizada para ondas mecánicas
Solución de onda viajera a la ecuación diferencial de onda de orden 2
Ejemplos típicos de ondas mecánicas: explicación de la forma cómo se abordan en éste módulo
Ejemplos típicos de ondas mecánicas: ondas transversales en cuerdas
Ejemplos típicos de ondas mecánicas: ondas transversales en slinky
Ejemplos típicos de ondas mecánicas: ondas longitudinales en slinky
Ejemplos típicos de ondas mecánicas: ondas longitudinales en barras sólidas
Ejemplos típicos de ondas mecánicas: ondas transversales en barras sólidas
Ejemplos típicos de ondas mecánicas: ondas longitudinales en fluidos
Resumen sobre velocidad de propagación en ondas mecánicas
Temas de interés: ondas sísmicas
Temas de interés: Tsunami
Taller
Introducción
Robert Hooke (Freshwater, 18 de julio de 1635 -
Londres, 3 de marzo de 1703) científico inglés.
Fue uno de los científicos experimentales más
importantes de la historia de la ciencia, polemista
incansable con un genio creativo de primer orden.
Sus intereses abarcaron campos tan dispares
como la biología, la medicina, la cronometría, la
física planetaria, la mecánica de sólidos
deformables, la microscopía, la náutica y la
arquitectura.
En este módulo se generaliza los resultados de
Hooke en sus estudios de los sólidos deformables
a los demás estados de la materia (líquido y gas). Esta generalización permitirá demostrar que la materia
en cualquiera de sus estados (sólido, líquido o gaseoso) es elástica lo que posibilita que sus partes oscilen y
que en el rango de las deformaciones en el cual se cumple la ley de Hooke, las perturbaciones que se
propagan a través de la materia, lo hacen como ondas.
2
La ley de Hooke generalizada para medios continuos
Los medios materiales reales son deformables, y por tanto, dentro determinados rangos son elásticos. Es
esta propiedad la que permite explicar que a través de ellos se propaguen ondas mecánicas. Los pequeños
elementos del medio oscilan cuando una onda se propaga en el mismo.
En éste módulo se considerará sistemas elásticos (que en la realidad, corresponde a todos los cuerpos),
homogéneos e isotrópicos que se encuentran bajo la acción de fuerzas constantes que le causan pequeñas
deformaciones.
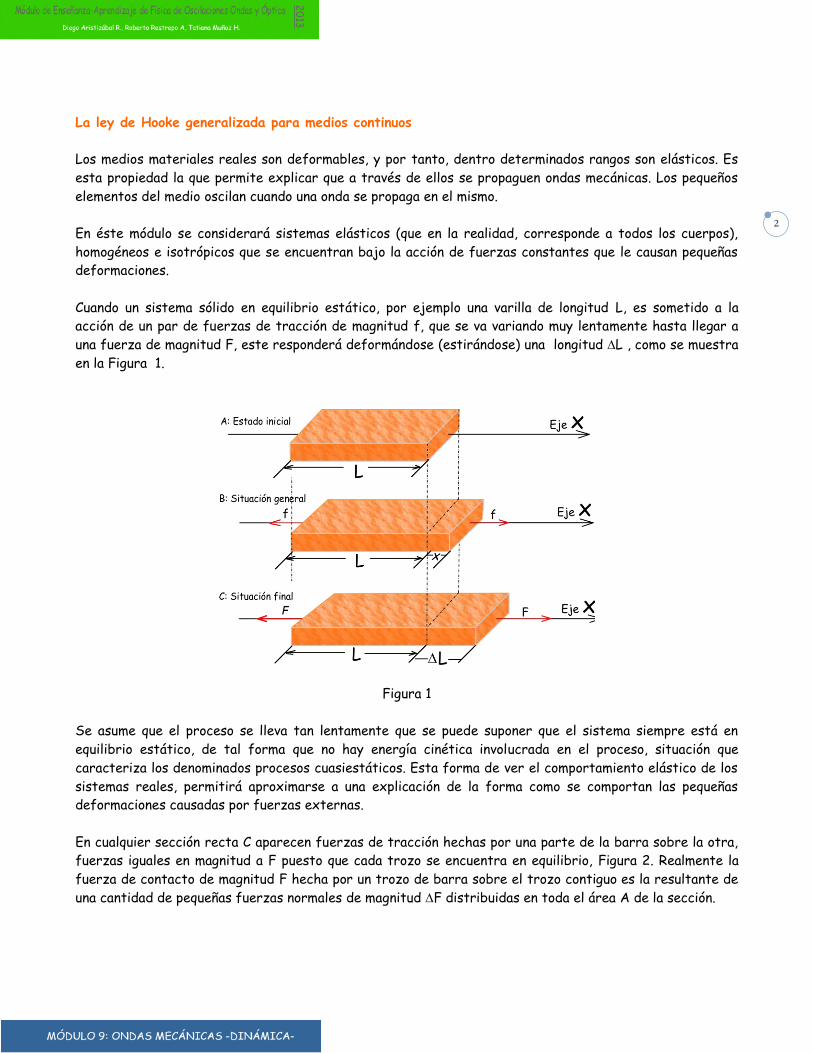
Cuando un sistema sólido en equilibrio estático, por ejemplo una varilla de longitud L, es sometido a la
acción de un par de fuerzas de tracción de magnitud f, que se va variando muy lentamente hasta llegar a
una fuerza de magnitud F, este responderá deformándose (estirándose) una longitud L , como se muestra
en la Figura 1.
Figura 1
Se asume que el proceso se lleva tan lentamente que se puede suponer que el sistema siempre está en
equilibrio estático, de tal forma que no hay energía cinética involucrada en el proceso, situación que
caracteriza los denominados procesos cuasiestáticos. Esta forma de ver el comportamiento elástico de los
sistemas reales, permitirá aproximarse a una explicación de la forma como se comportan las pequeñas
deformaciones causadas por fuerzas externas.
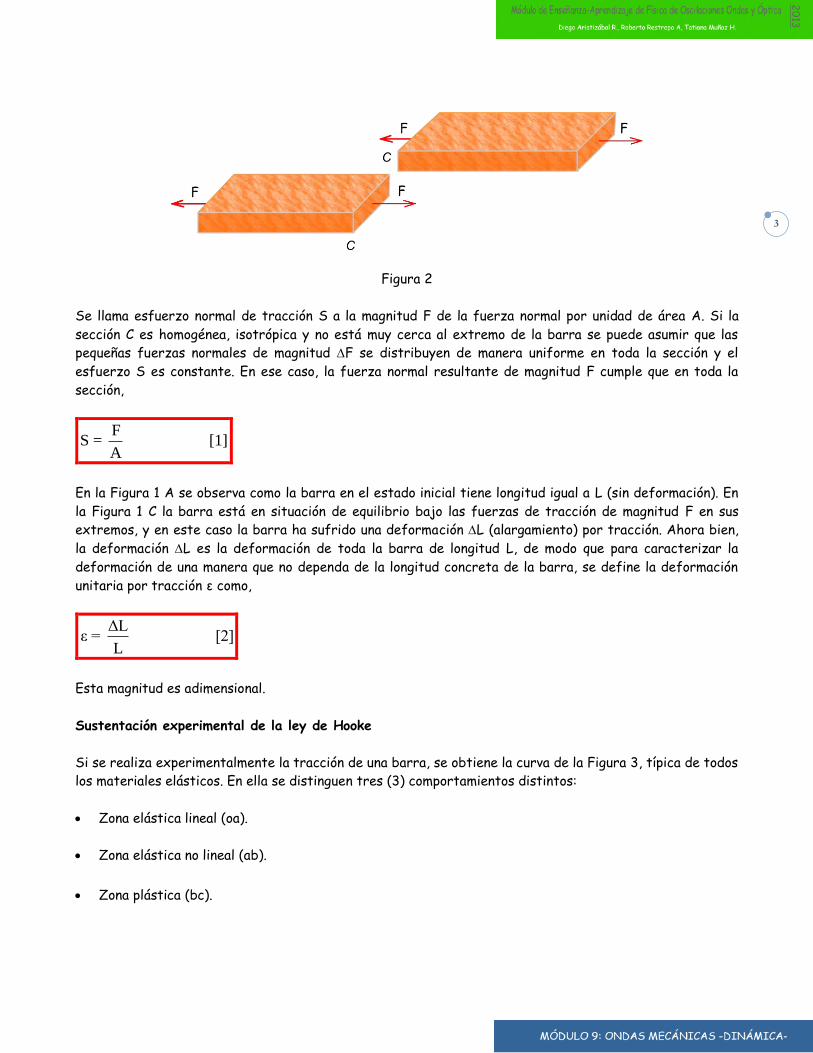
En cualquier sección recta C aparecen fuerzas de tracción hechas por una parte de la barra sobre la otra,
fuerzas iguales en magnitud a F puesto que cada trozo se encuentra en equilibrio, Figura 2. Realmente la
fuerza de contacto de magnitud F hecha por un trozo de barra sobre el trozo contiguo es la resultante de
una cantidad de pequeñas fuerzas normales de magnitud F distribuidas en toda el área A de la sección.
3
Figura 2
Se llama esfuerzo normal de tracción S a la magnitud F de la fuerza normal por unidad de área A. Si la
sección C es homogénea, isotrópica y no está muy cerca al extremo de la barra se puede asumir que las
pequeñas fuerzas normales de magnitud F se distribuyen de manera uniforme en toda la sección y el
esfuerzo S es constante. En ese caso, la fuerza normal resultante de magnitud F cumple que en toda la
sección,
FS = [1]
A
En la Figura 1 A se observa como la barra en el estado inicial tiene longitud igual a L (sin deformación). En
la Figura 1 C la barra está en situación de equilibrio bajo las fuerzas de tracción de magnitud F en sus
extremos, y en este caso la barra ha sufrido una deformación L (alargamiento) por tracción. Ahora bien,
la deformación L es la deformación de toda la barra de longitud L, de modo que para caracterizar la
deformación de una manera que no dependa de la longitud concreta de la barra, se define la deformación
unitaria por tracción ε como,
ΔLε = [2]
L
Esta magnitud es adimensional.
Sustentación experimental de la ley de Hooke
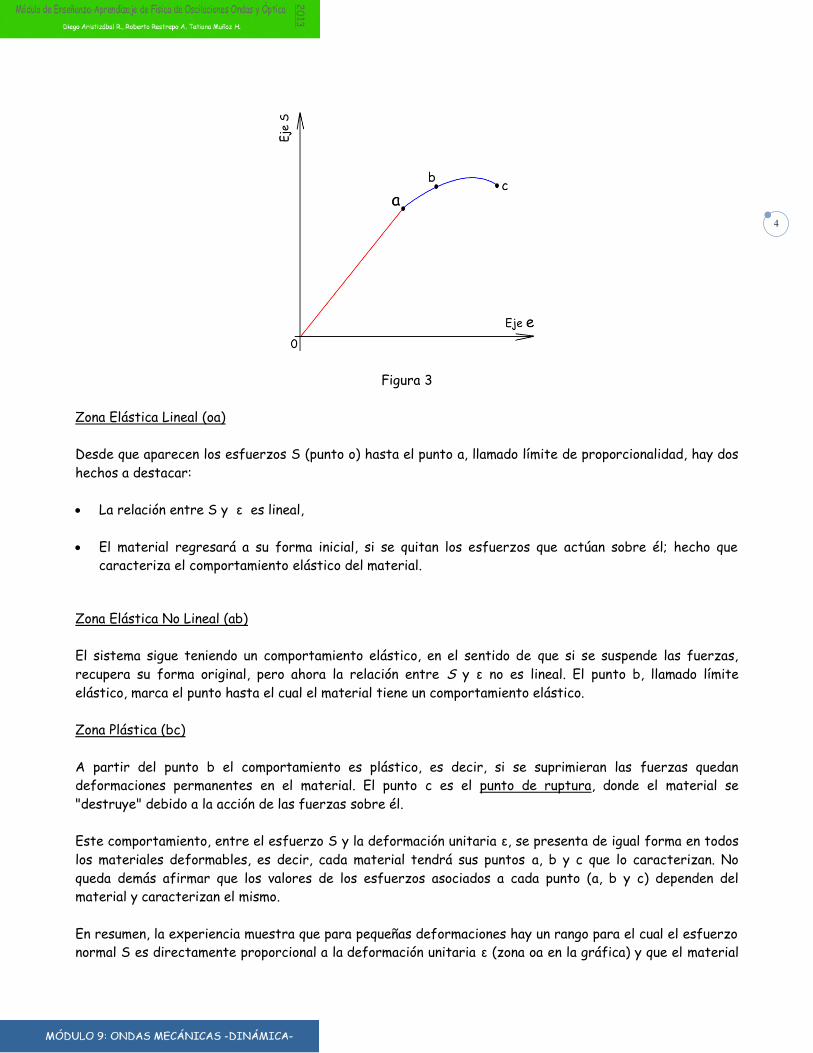
Si se realiza experimentalmente la tracción de una barra, se obtiene la curva de la Figura 3, típica de todos
los materiales elásticos. En ella se distinguen tres (3) comportamientos distintos:
Zona elástica lineal (oa).
Zona elástica no lineal (ab).
Zona plástica (bc).
4
Figura 3
Zona Elástica Lineal (oa)
Desde que aparecen los esfuerzos S (punto o) hasta el punto a, llamado límite de proporcionalidad, hay dos
hechos a destacar:
La relación entre S y ε es lineal,
El material regresará a su forma inicial, si se quitan los esfuerzos que actúan sobre él; hecho que
caracteriza el comportamiento elástico del material.
Zona Elástica No Lineal (ab)
El sistema sigue teniendo un comportamiento elástico, en el sentido de que si se suspende las fuerzas,
recupera su forma original, pero ahora la relación entre S y ε no es lineal. El punto b, llamado límite
elástico, marca el punto hasta el cual el material tiene un comportamiento elástico.
Zona Plástica (bc)
A partir del punto b el comportamiento es plástico, es decir, si se suprimieran las fuerzas quedan
deformaciones permanentes en el material. El punto c es el punto de ruptura, donde el material se
"destruye" debido a la acción de las fuerzas sobre él.
Este comportamiento, entre el esfuerzo S y la deformación unitaria ε, se presenta de igual forma en todos
los materiales deformables, es decir, cada material tendrá sus puntos a, b y c que lo caracterizan. No
queda demás afirmar que los valores de los esfuerzos asociados a cada punto (a, b y c) dependen del
material y caracterizan el mismo.
En resumen, la experiencia muestra que para pequeñas deformaciones hay un rango para el cual el esfuerzo
normal S es directamente proporcional a la deformación unitaria ε (zona oa en la gráfica) y que el material
5
volverá a su longitud inicial si el esfuerzo sobre él se quita; situación que caracteriza el denominado rango
elástico del material. En dicho rango, el comportamiento de las pequeñas deformaciones está determinado
por la ley de Hooke, que se escribe como,
S = Yε [3]
La constante de proporcionalidad Y se denomina Módulo de elasticidad de Young que es único para cada
material, no depende de sus dimensiones y se mide en Pascales ( 1 Pa=1 N/m2).
Adicionalmente, el comportamiento de un material a compresión es análogo al comportamiento a tracción.
Es válida la ley de Hooke con el mismo módulo de Young Y (S = Yε ), sólo que ahora, como S < 0
(compresión), ε < 0 y por tanto L < 0 y el material, por supuesto, se acorta debido a la compresión.
Igualmente la experiencia demuestra, un idéntico comportamiento para el caso de deformaciones debido a
esfuerzos transversales o de cizalladura.
La generalización de la ley de Hooke
Para pequeñas deformaciones existe una proporcionalidad entre el esfuerzo (S) y la deformación unitaria
(ε) generada. Esta es la denominada ley de Hooke, y se expresa así,
S = β ε [4]
donde la constante de proporcionalidad da cuenta de la elasticidad del medio. El esfuerzo se define como
el cociente entre la magnitud de la fuerza aplicada (normal o tangencialmente, F) a una superficie y el área
(A) de esta. La deformación unitaria se define como el cociente entre la deformación (longitudinal o
transversal, L) del elemento analizado y su longitud original (L). Es decir,
FS = [1]
A
ΔLε = [2]
L
El esfuerzo se mide en N.m-2 (Pascal, abreviado Pa) y es una cantidad escalar. La deformación unitaria ε es
adimensional. El módulo de elasticidad se mide en Pa.
En la Figura 4 se aplicaran estas definiciones a un elemento del medio continuo de longitud dx. El trozo de
material se considera de sección transversal constante, homogéneo e isotrópico. El material es sometido a
fuerzas iguales (en magnitud, F) en sus extremos. Por lo tanto él y cada elemento del mismo estará en
equilibrio y bajo la acción de las fuerzas externas opuestas aplicadas en sus extremos y de magnitudes
iguales a F. Bajo la acción de los esfuerzos debidos a estas fuerzas, cada elemento se deformara en dy.
6
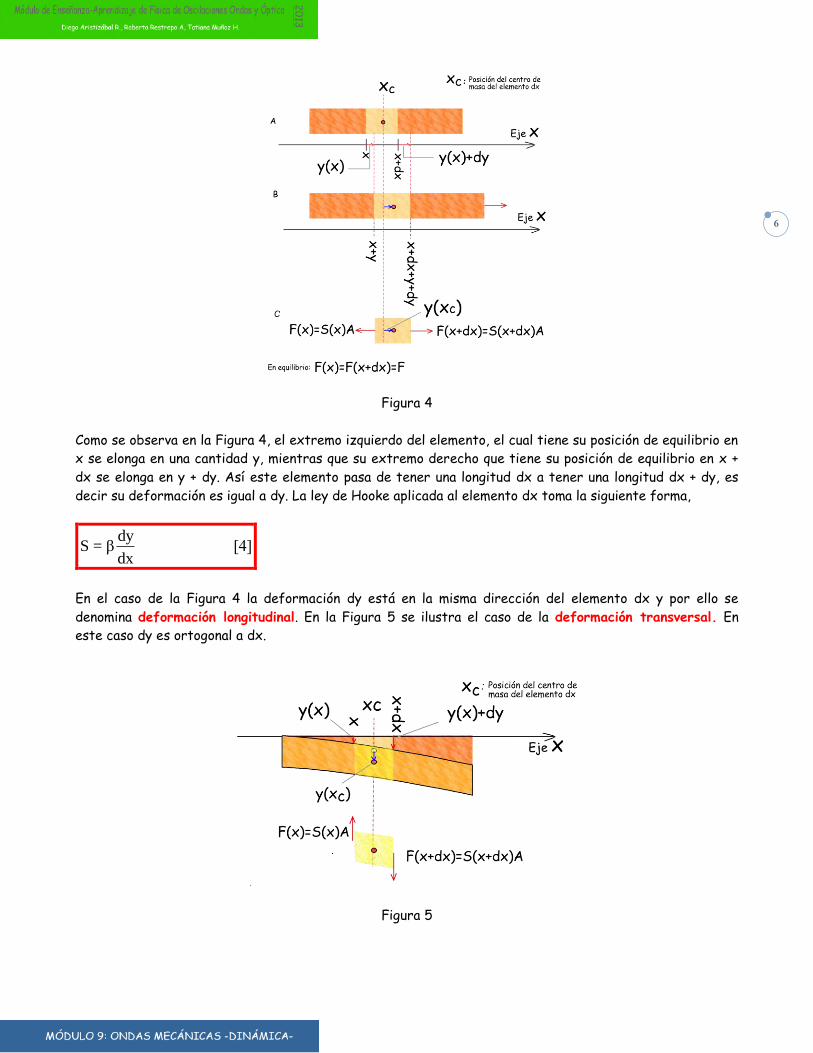
Figura 4
Como se observa en la Figura 4, el extremo izquierdo del elemento, el cual tiene su posición de equilibrio en
x se elonga en una cantidad y, mientras que su extremo derecho que tiene su posición de equilibrio en x +
dx se elonga en y + dy. Así este elemento pasa de tener una longitud dx a tener una longitud dx + dy, es
decir su deformación es igual a dy. La ley de Hooke aplicada al elemento dx toma la siguiente forma,
dyS = β [4]
dx
En el caso de la Figura 4 la deformación dy está en la misma dirección del elemento dx y por ello se
denomina deformación longitudinal. En la Figura 5 se ilustra el caso de la deformación transversal. En
este caso dy es ortogonal a dx.
Figura 5
7
La ecuación diferencial de onda de orden 2 generalizada para ondas mecánicas
Cuando una onda elástica (onda mecánica) se propaga por el medio material, el centro de masa de cada
porción del medio se sale de su posición de equilibrio xc, Figura 4, perdiendo éste estado debido a que los
esfuerzos a ambos lados de cada trozo de material no son iguales; el centro de masa adquirirá aceleración
presentando cambios tanto en su energía cinética como en su energía potencial. La elongación y dependerá
del valor de la posición x y del tiempo t, es decir, y (x,t), de tal forma que la ley de Hooke tomará la
forma,
yS = β [5]
x
Aplicando la segunda ley de Newton a cada elemento material de longitud dx y de masa dm, Figura 4, y
teniendo en cuenta que en esta situación las fuerzas llamadas de volumen (como la fuerza gravitacional) se
desprecian frente a las fuerzas llamadas de superficie (las que generan los esfuerzos), se obtiene,
c
2
2
x
yF = dm
t
donde la aceleración de vibración es la del centro de masa del elemento dx. Aplicando la ley de Hooke en
los extremos del elemento, y sabiendo que A es el área de la sección transversal y que dm = ρAdx , la
densidad del material, S x + dx es el esfuerzo sobre la superficie de la derecha del trozo de material y
S x el esfuerzo sobre su superficie izquierda, se obtiene,
c
2
2
x
yS x + dx - S x A = ρAdx
t
Aplicando la ley de Hooke, la expresión se transforma en,
c
2
2
x+dx x x
y y yβ - A = ρAdx
x x t
si dx 0 , se obtiene,
2 2
2 2
β y y = [6]
ρ x t
o en su forma comprimida,
xx tt
β y = y [6A]
ρ
8
donde las derivadas quedarán evaluadas en x (el centro de masa se acerca al extremo izquierdo del
elemento tanto como se quiera). A esta ecuación se le conoce con el nombre de ecuación diferencial de
onda de orden 2. Analizándola dimensionalmente se concluye que β
ρ tiene las dimensiones de velocidad al
cuadrado. Como se mostrará en la sección sobre la cinemática de ondas viajeras, esta corresponde a la
velocidad de propagación de la onda a través del medio material,
βV = [7]
ρ
es decir, la velocidad de propagación V de una onda mecánica depende sólo de las propiedades del medio
material (su elasticidad y su densidad) y la ecuación de onda toma la forma,
2 2
2
2 2
y yV = [8]
x t
2
xx ttV y = y [8A]
Conclusión:
Se acaba de mostrar que combinando la segunda ley de Newton y la ley de Hooke se obtiene la
ecuación diferencial de onda de orden 2. Por lo tanto, se puede concluir que en el rango en el cual
un medio material continuo cumple la ley de Hooke, la energía mecánica que se propaga a través de
las vibraciones lo hace cumpliendo la ecuación diferencial de onda de orden 2: es decir el
transporte energético se hace a través de una ONDA.
Solución de onda viajera a la ecuación diferencial de onda de orden 2
Pulso Viajero
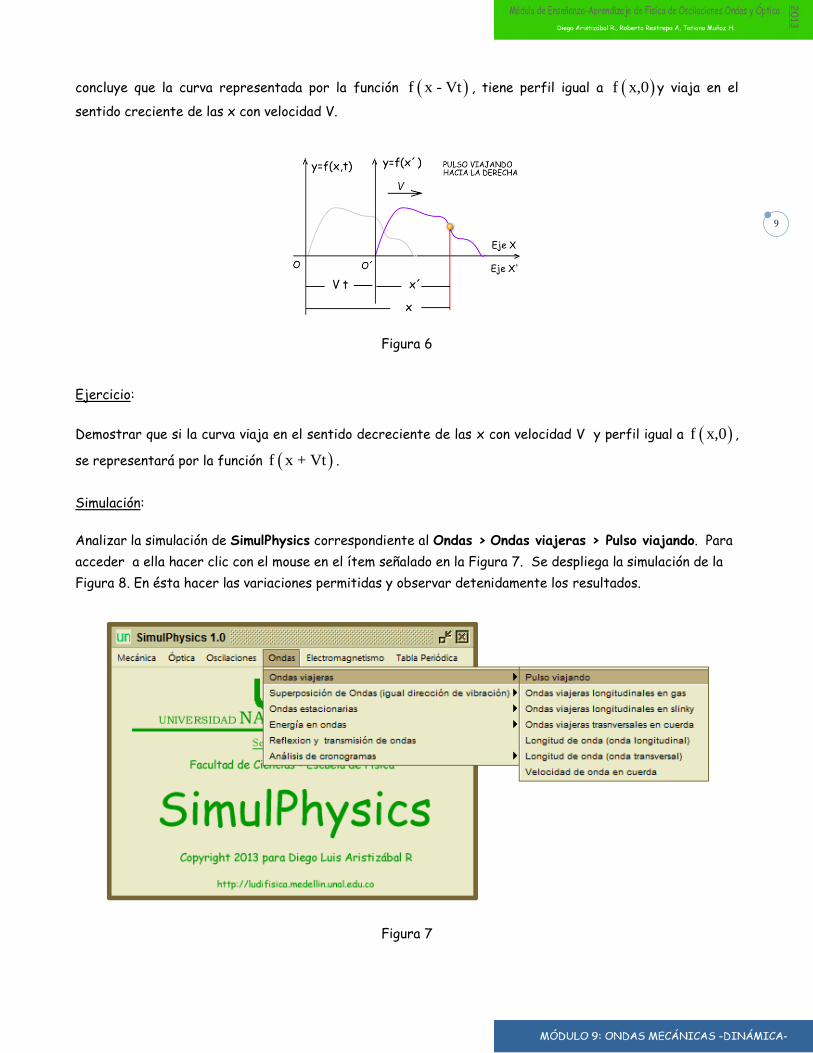
En la Figura 6 se ilustra cómo una función que tenga la forma f x - Vt representa una curva cuyo perfil
es el de la función f x y que viaja en el sentido creciente de las x con velocidad V. En la figura se ilustra
dos sistemas de coordenadas O y O’. El sistema O está fijo y el sistema O’ está rígidamente pegado a la
curva que se mueve con velocidad V. Se ha supuesto que O y O’ coinciden en el instante t=0.
Se representa un punto de la curva que tendrá abscisa x en el sistema O y abscisa x’ en el sistema O’. La
curva en el instante t=0, se representa por la función f x,0 a la que se le denomina perfil de onda y en
cualquier otro instante se representará por la función f x en el sistema O’, o lo que es lo mismo por la
función f x - Vt en el sistema O, ya que se puede observar de la figura que x = x - Vt . Por lo tanto se
9
concluye que la curva representada por la función f x - Vt , tiene perfil igual a f x,0 y viaja en el
sentido creciente de las x con velocidad V.
Figura 6
Ejercicio:
Demostrar que si la curva viaja en el sentido decreciente de las x con velocidad V y perfil igual a f x,0 ,
se representará por la función f x + Vt .
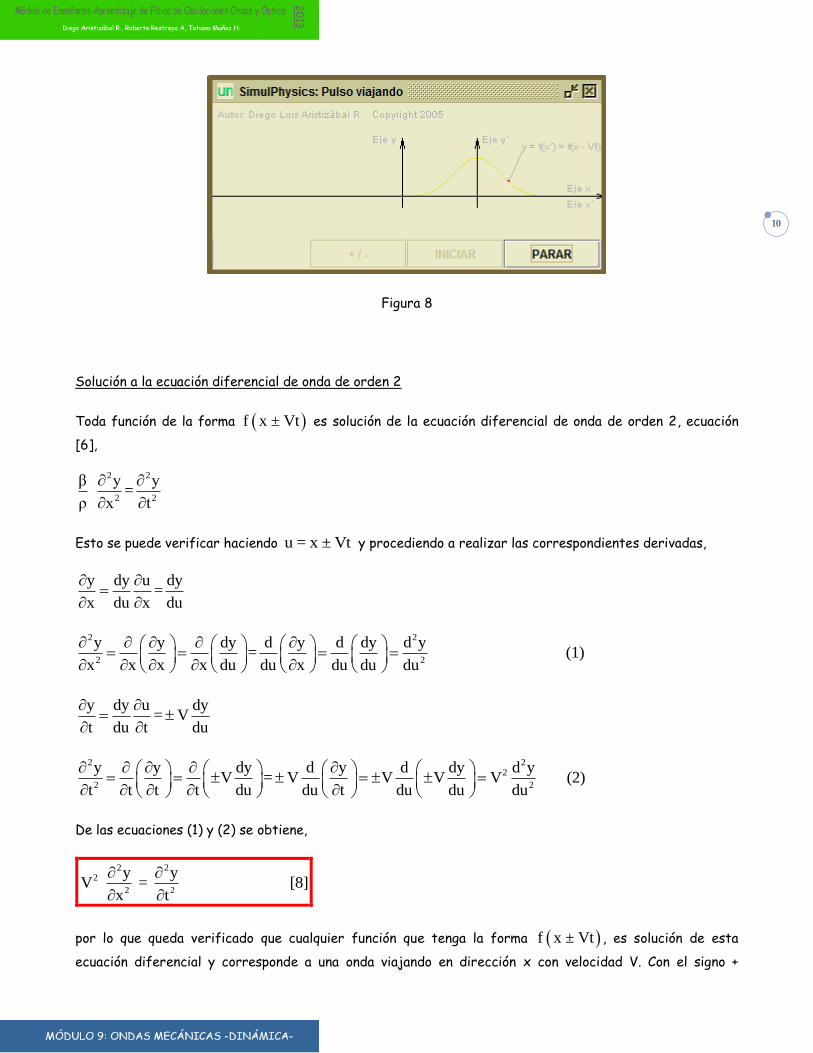
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Ondas > Ondas viajeras > Pulso viajando. Para
acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 7. Se despliega la simulación de la
Figura 8. En ésta hacer las variaciones permitidas y observar detenidamente los resultados.
Figura 7
10
Figura 8
Solución a la ecuación diferencial de onda de orden 2
Toda función de la forma f x ± Vt es solución de la ecuación diferencial de onda de orden 2, ecuación
[6],
2 2
2 2
β y y =
ρ x t
Esto se puede verificar haciendo u = x ± Vt y procediendo a realizar las correspondientes derivadas,
y dy u dy=
x du x du
2 2
2 2
y y dy d y d dy d y= (1)
x x x x du du x du du du
y dy u dy= V
t du t du
2 2
2
2 2
y y dy d y d dy d yV = V V V V (2)
t t t t du du t du du du
De las ecuaciones (1) y (2) se obtiene,
2 2
2
2 2
y yV = [8]
x t
por lo que queda verificado que cualquier función que tenga la forma f x ± Vt , es solución de esta
ecuación diferencial y corresponde a una onda viajando en dirección x con velocidad V. Con el signo +
11
corresponde a una onda viajando hacia valores decrecientes de x y con signo - corresponde a una onda
viajando hacia valores crecientes de x. A f x,0 se le denomina perfil de la onda.
Onda Viajera Armónica Unidimensional
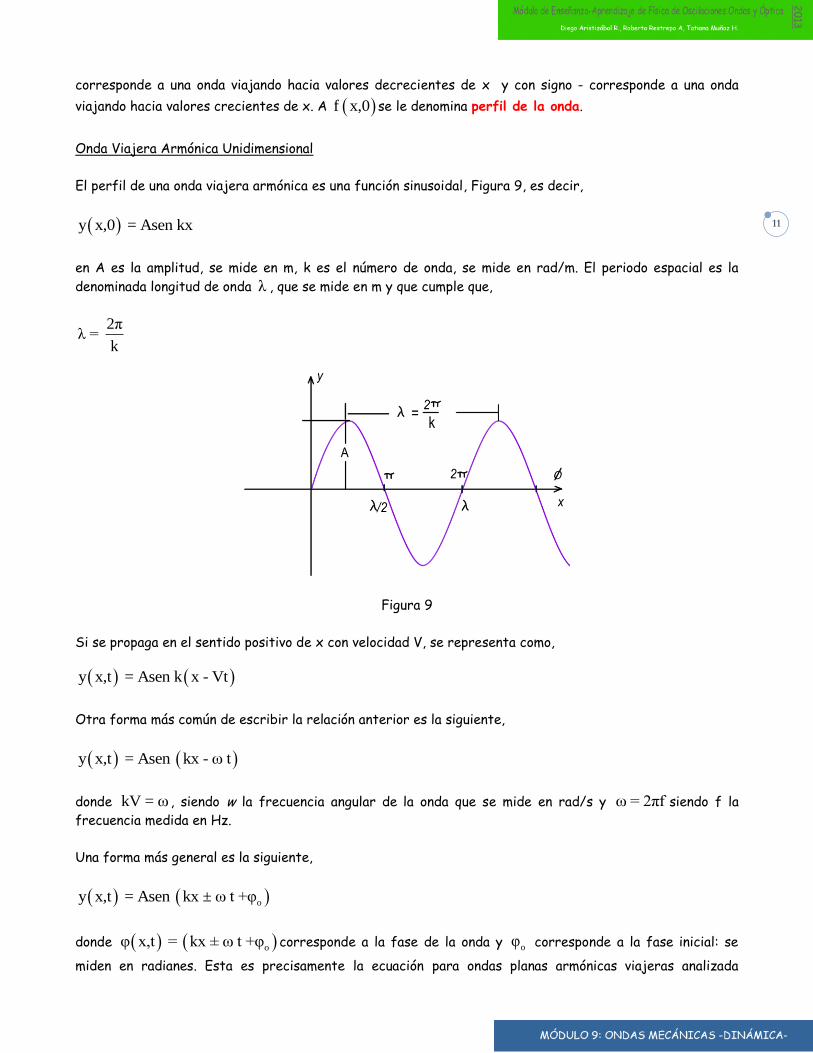
El perfil de una onda viajera armónica es una función sinusoidal, Figura 9, es decir,
y x,0 = Asen kx
en A es la amplitud, se mide en m, k es el número de onda, se mide en rad/m. El periodo espacial es la
denominada longitud de onda λ , que se mide en m y que cumple que,
2πλ =
k
Figura 9
Si se propaga en el sentido positivo de x con velocidad V, se representa como,
y x,t = Asen k x - Vt
Otra forma más común de escribir la relación anterior es la siguiente,
y x,t = Asen kx - ω t
donde kV = ω , siendo w la frecuencia angular de la onda que se mide en rad/s y ω = 2πf siendo f la
frecuencia medida en Hz.
Una forma más general es la siguiente,
oy x,t = Asen kx ± ω t +φ
donde oφ x,t = kx ± ω t +φ corresponde a la fase de la onda y oφ corresponde a la fase inicial: se
miden en radianes. Esta es precisamente la ecuación para ondas planas armónicas viajeras analizada
12
suficientemente en el módulo 7: con signo – se propaga en dirección creciente de x y con signo + en
dirección decreciente de x.
Ejemplos típicos de ondas mecánicas: explicación de la forma cómo se abordan en éste módulo
En diferentes situaciones de la ingeniería es necesario conocer a profundidad el comportamiento de la
materia cuando a través de ella se propaga una onda. Ejemplos son: el diseño de estructuras
sismoresistentes, el estudio de los tzunami, el análisis geofísico, el diseño de salas acústicas, el diseño de
máquinas, el control del ruido, entre otros.
Las ondas mecánicas (también denominadas ondas materiales o elásticas) se caracterizan por que se
propagan a través de la vibración de la materia: en cada porción de ésta se realiza, mientras se propaga la
onda, una transformación de energía cinética en energía potencial y viceversa.
En este módulo se estudiarán algunas de estas ondas mecánicas: ondas transversales en una cuerda, ondas
trasversales en un slinky, ondas longitudinales en un slinky, ondas longitudinales en barras sólidas, ondas
transversales en barras sólidas y ondas longitudinales en fluidos.
Se podría hacer un análisis detallado de la dinámica en cada una de estas ondas mecánicas, es decir, a
través de la aplicación de la segunda ley de Newton y de la ley de Hooke en una porción del medio material
continuo para cada caso, y combinándolas llegar a la ecuación de onda y de aquí deducir la velocidad de
propagación V. Este es el camino que normalmente se sigue en los textos de física general, sin embargo, el
camino que se sigue en éste módulo es el que se describe a continuación:
Como se supondrá que estos medios se encuentran bajo la acción de esfuerzos para los cuales éstos se
encuentran en la región hookeana, es decir, en la región donde se cumple la ley de Hooke, se asumirá
que la energía que se propaga a través de las vibraciones se propaga en forma de ONDA.
Se analizará la forma de la ley de Hooke correspondiente para las deformaciones que se están
presentando en dicho medio y de aquí se deducirá el factor de elasticidad β .
Conocido el factor β se obtiene la expresión de la velocidad de propagación V de las ondas en este
medio aplicando la expresión [7],
βV = [7]
ρ
Ejemplos típicos de ondas mecánicas: ondas transversales en cuerdas
Ley de Hooke en una cuerda
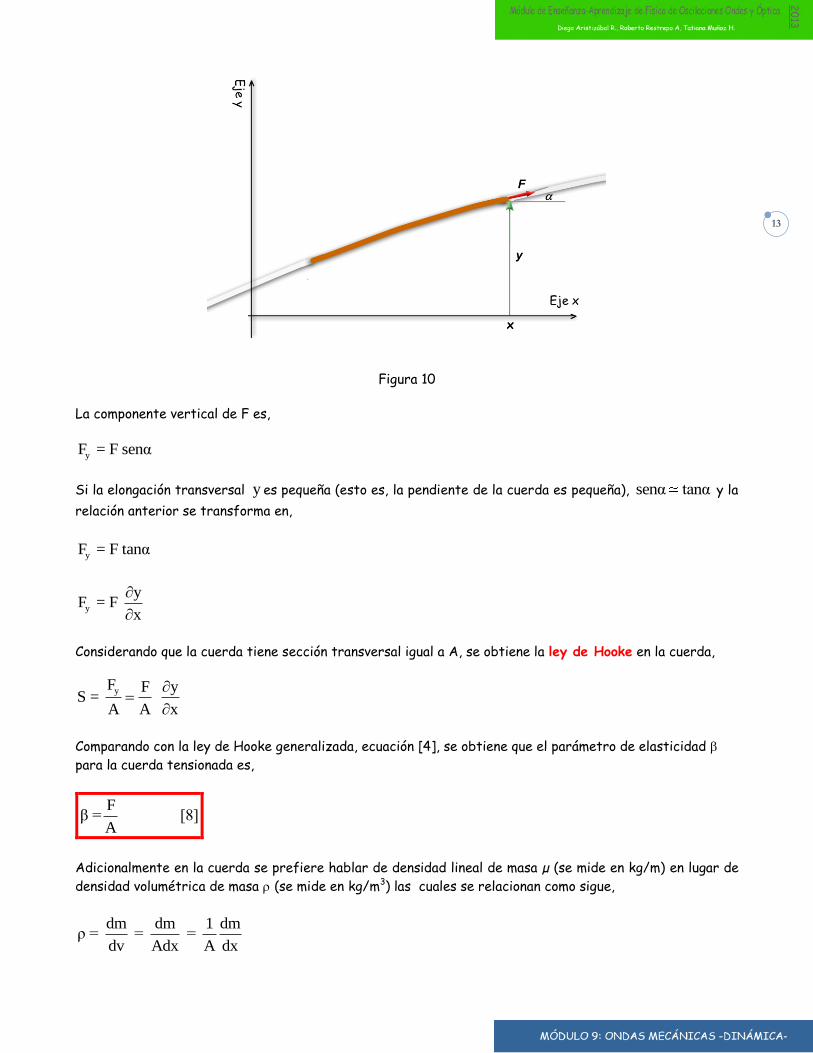
En la Figura 10 se ilustra un segmento de una cuerda tensionada cuyo extremo derecho está en la posición
x. F es magnitud de la fuerza de tensión que ejerce la sección derecha de la cuerda sobre este segmento.
13
Figura 10
La componente vertical de F es,
yF = F senα
Si la elongación transversal y es pequeña (esto es, la pendiente de la cuerda es pequeña), senα tanα y la
relación anterior se transforma en,
yF = F tanα
y
yF = F
x
Considerando que la cuerda tiene sección transversal igual a A, se obtiene la ley de Hooke en la cuerda,
yF F yS =
A A x
Comparando con la ley de Hooke generalizada, ecuación [4], se obtiene que el parámetro de elasticidad
para la cuerda tensionada es,
Fβ = [8]
A
Adicionalmente en la cuerda se prefiere hablar de densidad lineal de masa µ (se mide en kg/m) en lugar de
densidad volumétrica de masa (se mide en kg/m3) las cuales se relacionan como sigue,
dm dm 1 dmρ = = =
dv Adx A dx
14
En donde el diferencial de volumen dv es igual a Adx siendo A la el área de la sección transversal de la
cuerda. Por lo tanto,
μρ = [9]
A
Reemplazando [8] y [9] en la ecuación [7] se obtiene,
Fβ AV = =
μρ
A
FV = [10]
μ
Es decir, la velocidad de propagación de las ondas transversales en una cuerda depende de la
tensión y de su densidad lineal de masa, ecuación [10].
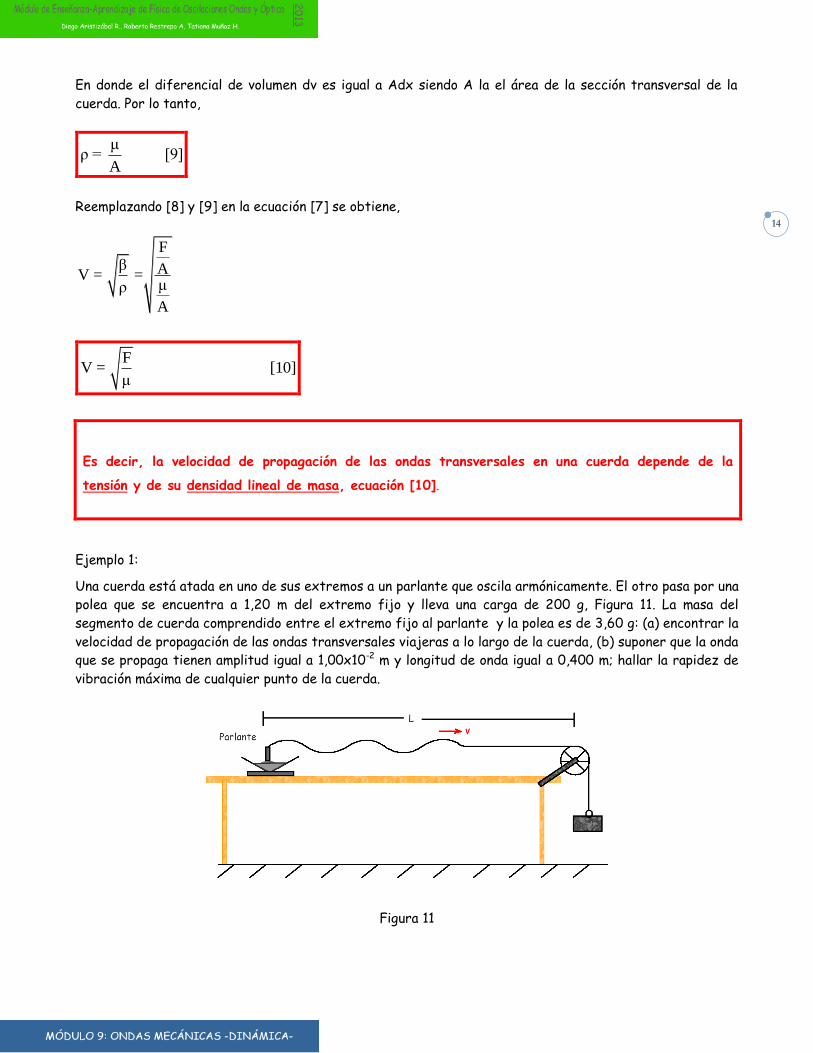
Ejemplo 1:
Una cuerda está atada en uno de sus extremos a un parlante que oscila armónicamente. El otro pasa por una
polea que se encuentra a 1,20 m del extremo fijo y lleva una carga de 200 g, Figura 11. La masa del
segmento de cuerda comprendido entre el extremo fijo al parlante y la polea es de 3,60 g: (a) encontrar la
velocidad de propagación de las ondas transversales viajeras a lo largo de la cuerda, (b) suponer que la onda
que se propaga tienen amplitud igual a 1,00x10-2 m y longitud de onda igual a 0,400 m; hallar la rapidez de
vibración máxima de cualquier punto de la cuerda.
Figura 11
15
Solución:
(a) La velocidad de propagación de las ondas en la cuerda está dada por la ecuación [10],
FV =
μ
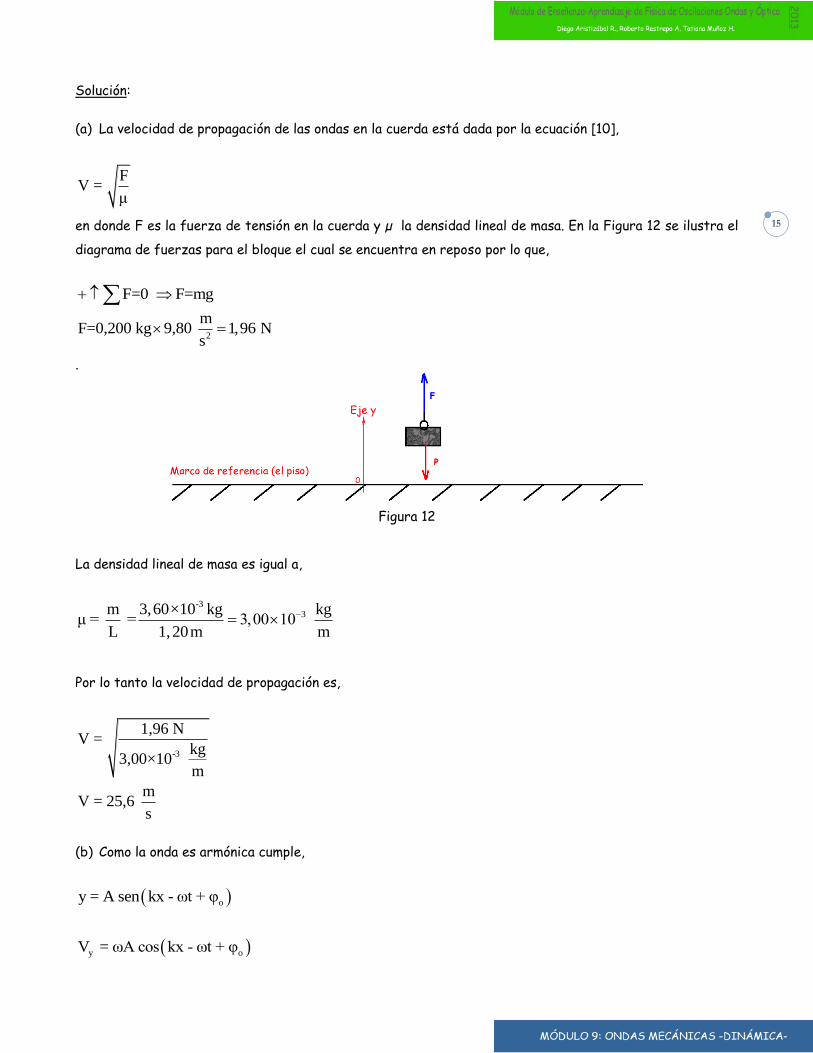
en donde F es la fuerza de tensión en la cuerda y µ la densidad lineal de masa. En la Figura 12 se ilustra el
diagrama de fuerzas para el bloque el cual se encuentra en reposo por lo que,
F=0 F=mg
2
mF=0,200 kg 9,80 1,96 N
s
.
Figura 12
La densidad lineal de masa es igual a,
-3
3m 3,60×10 kg kgμ = = 3,00 10
L 1,20m m
Por lo tanto la velocidad de propagación es,
-3
1,96 NV =
kg3,00×10
m
mV = 25,6
s
(b) Como la onda es armónica cumple,
oy = A sen kx - ωt + φ
y oV = ωA cos kx - ωt + φ
16
Por lo tanto el valor máximo de la rapidez es,
y,maxV = ωA
y,maxV = 2πf A 1
Ahora,
λf = V
Vf =
λ
m25,6
sf = 64,0 Hz0,400 m
Reemplazando en (1),
1
y,maxV = 2π 64,0 s 0,01 m
y,max
mV = 4,02
s
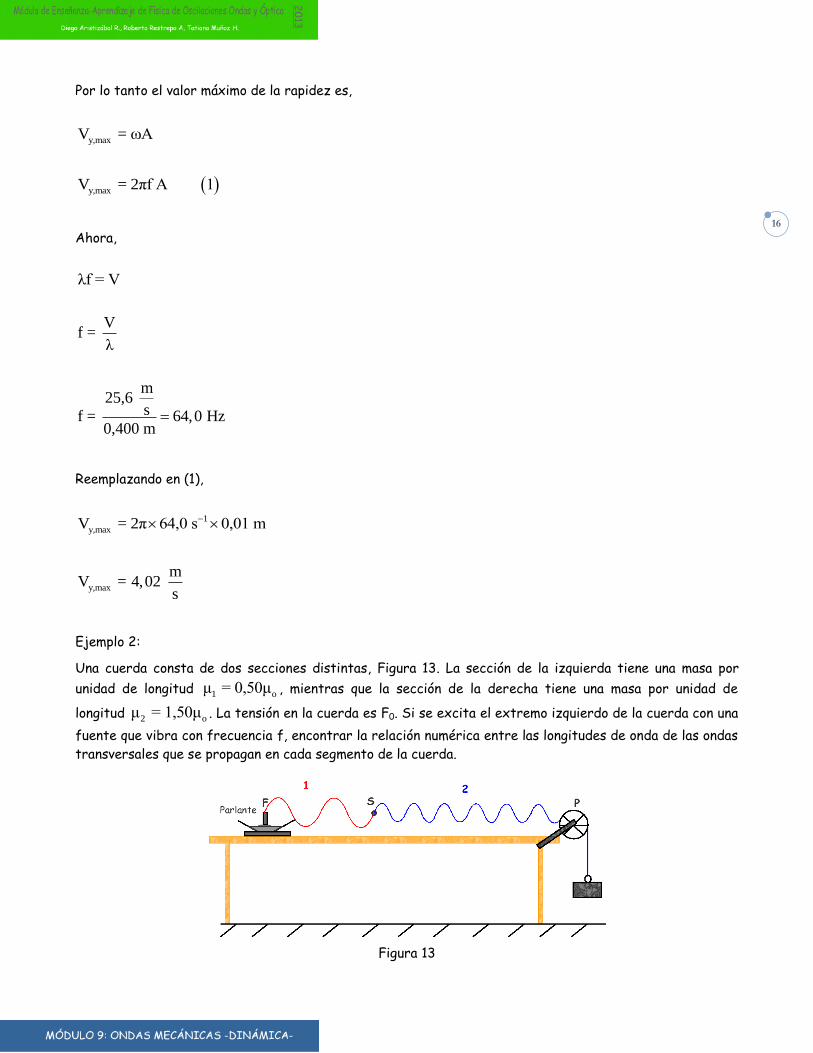
Ejemplo 2:
Una cuerda consta de dos secciones distintas, Figura 13. La sección de la izquierda tiene una masa por
unidad de longitud 1 oμ = 0,50μ , mientras que la sección de la derecha tiene una masa por unidad de
longitud 2 oμ = 1,50μ . La tensión en la cuerda es F0. Si se excita el extremo izquierdo de la cuerda con una
fuente que vibra con frecuencia f, encontrar la relación numérica entre las longitudes de onda de las ondas
transversales que se propagan en cada segmento de la cuerda.
Figura 13
17
Solución:
Cuando la onda cambia de medio NO le cambia la frecuencia: cambia la velocidad de propagación y la
longitud de onda. Adicionalmente la tensión en cualquiere sección de la cuerda es la misma, Fo. En la parte
izquierda de la cuerda la onda se propaga con mayor velocidad (tiene menor densidad lineal para la misma
tensión) y por lo tanto la longitud de onda también es mayor. Con base en la ecaución [10] se tiene,
o1
1
FV =
μ
o2
2
FV =
μ
y por lo tanto,
o
11
2 o
2
F
μV = 1
V F
μ
Pero,
1 1 1λ f = V 2
2 2 2λ f = V 3
Reemplazando (2) y (3) en (1) y sabiendo que f1=f2=f, se obtiene,
1 2
2 1
λ μ =
λ μ
o1
2 o
1,50μλ =
λ 0,50μ
1
2
λ = 3
λ

18
Ejemplo 3:
Para la cuerda del ejemplo 1 (Figura 11), si el parlante oscila con una frecuencia de igual a 25 Hz, si se
requiere que se genere la onda estacionaria correspondiente al modo de oscilación 2: (a) dejando la longitud
de la cuerda constante en cuánto habrá que variar el valor de la carga que se suspende en el otro extremo,
b) dejando la carga igual cuánto se tendrá que desplazar el parlante.
Solución:
La resonancia se puede lograr de dos formas:
Dejando las propiedades mecánicas y el tamaño del sistema (en este caso la longitud de la cuerda) fijos
del sitema y cambiando la frecuencia externa al valor de la frecuencia propia del armónico deseado.
Aquí se cambia la frecuencia externa y permenece constantes las frecuencias propias (es decir, el
espectro de frecuencias).
Dejando la frecuencia externa fija y cambiando las propiedades mecánicas o el tamaño del sistema
hasta lograr que la frecuencia propia del armónico deseado se igual a la frecuencia externa. Aquí
permanece constante la frecuencia externa y cambian las frecuencias propias (es decir, se cambia el
espectro de frecuencias).
El segundo caso es el correspondiente a este ejemplo.
Las frecuencias porpias de este sistema con fronteras NODO-NODO son,
n
nVf = , n = 1,2,3,...
2L
En donde L es la longitud de la cuerda oscilante, V la velocidad de propagación de las ondas trasnversales
viajeras,
FV =
μ
Esta cuerda tiene una densidad lineal de masa igual a,
-3
3m 3,60×10 kg kgμ = = 3,00 10
L 1,20m m
(a) Para que haya resonancia en el armónico 2 se tiene que f2=f= 25 Hz,
19
n2L fV = , n = 1,2,3,...
n
22L fV =
2
2V = L f
Es decir en la longitud de la cuerda cabe una longitud de onda en este armómónico,
-1V = 1,20 m × 25 s
mV = 30
s
y como,
FV =
μ
2F = V μ
2
3m kgF = 30 3,00 10
s m
F = 2,70 N
1 kfF = 2,70 N 0,276 kgf
9,80 N
que corresponde a una masa de la carga igual a 276 g. Por lo tanto habrá que agregar una carga de 76 g de
masa a la original que es de 200 g.
(b) Si se deja la carga igual habrá que cambiar la longitud L del sistema. Sabiendo que,
2V = L f
2
V L =
f
20
Como,
mV = 25,6
s
entonces,
m25,6
sL = 1
25 s
L = 1,024 m = 102,4 cm
La longitud original era 120 cm, por lo tanto habrá que desplazar el parlante hacia la polea 17,6 cm.
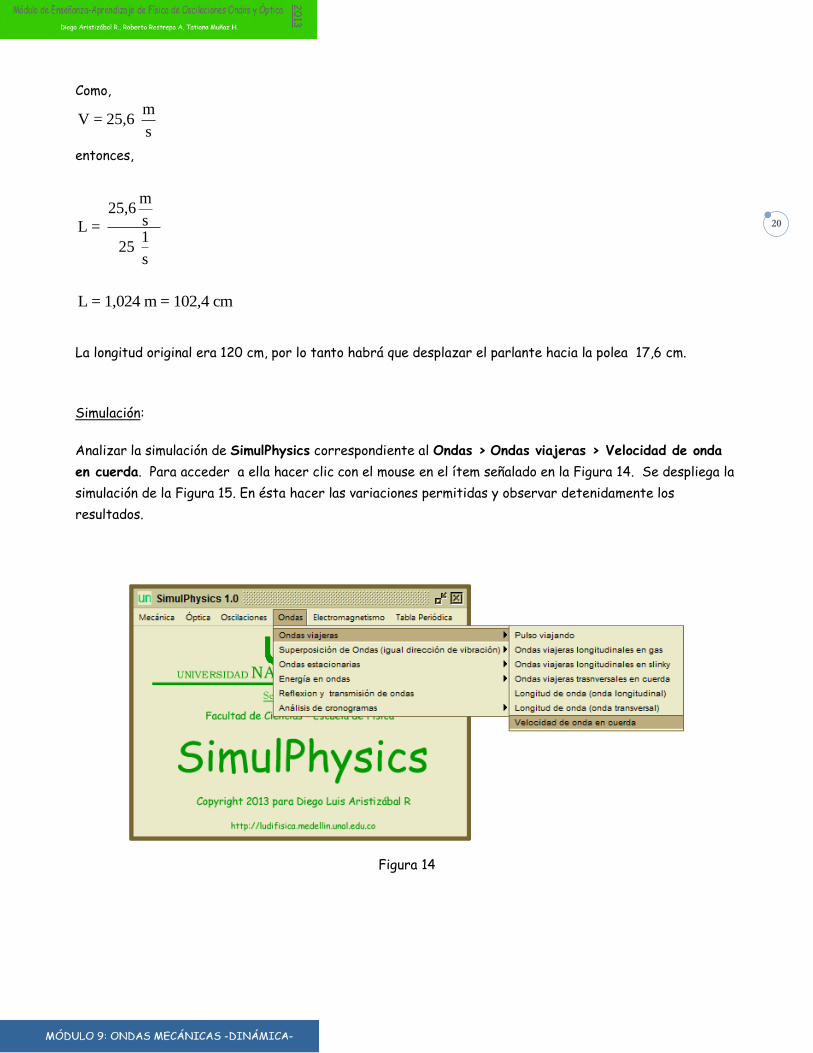
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Ondas > Ondas viajeras > Velocidad de onda
en cuerda. Para acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 14. Se despliega la
simulación de la Figura 15. En ésta hacer las variaciones permitidas y observar detenidamente los
resultados.
Figura 14
21
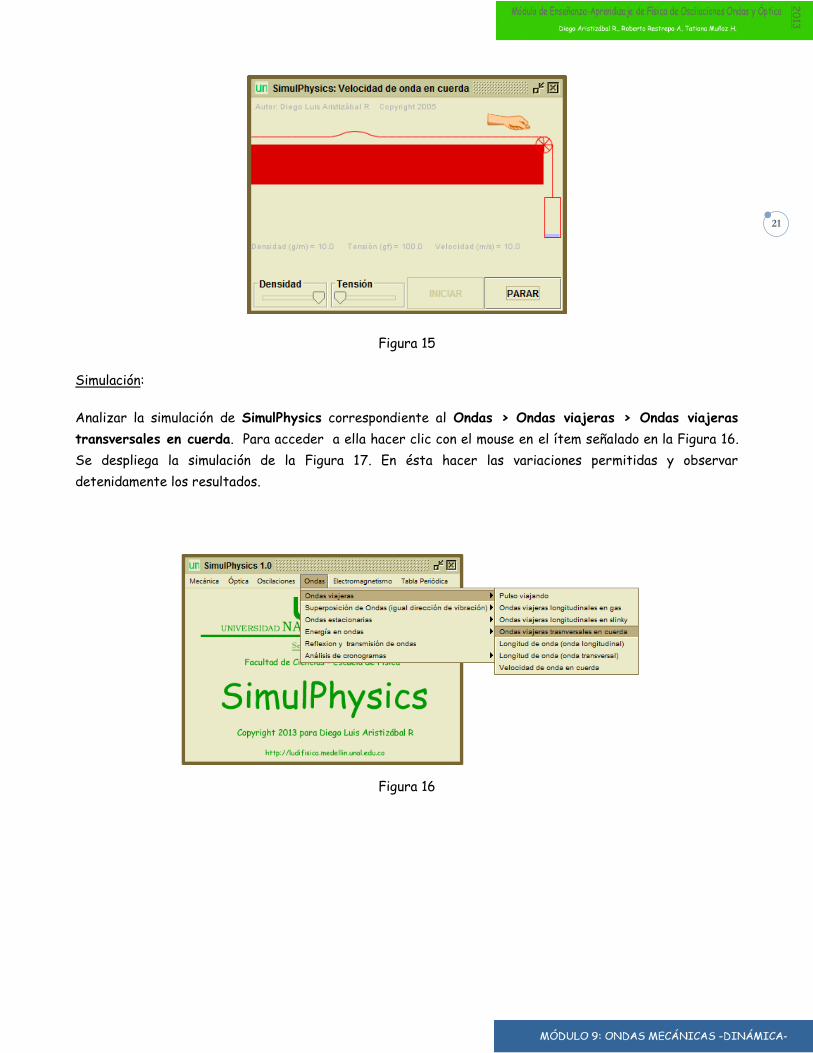
Figura 15
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Ondas > Ondas viajeras > Ondas viajeras
transversales en cuerda. Para acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 16.
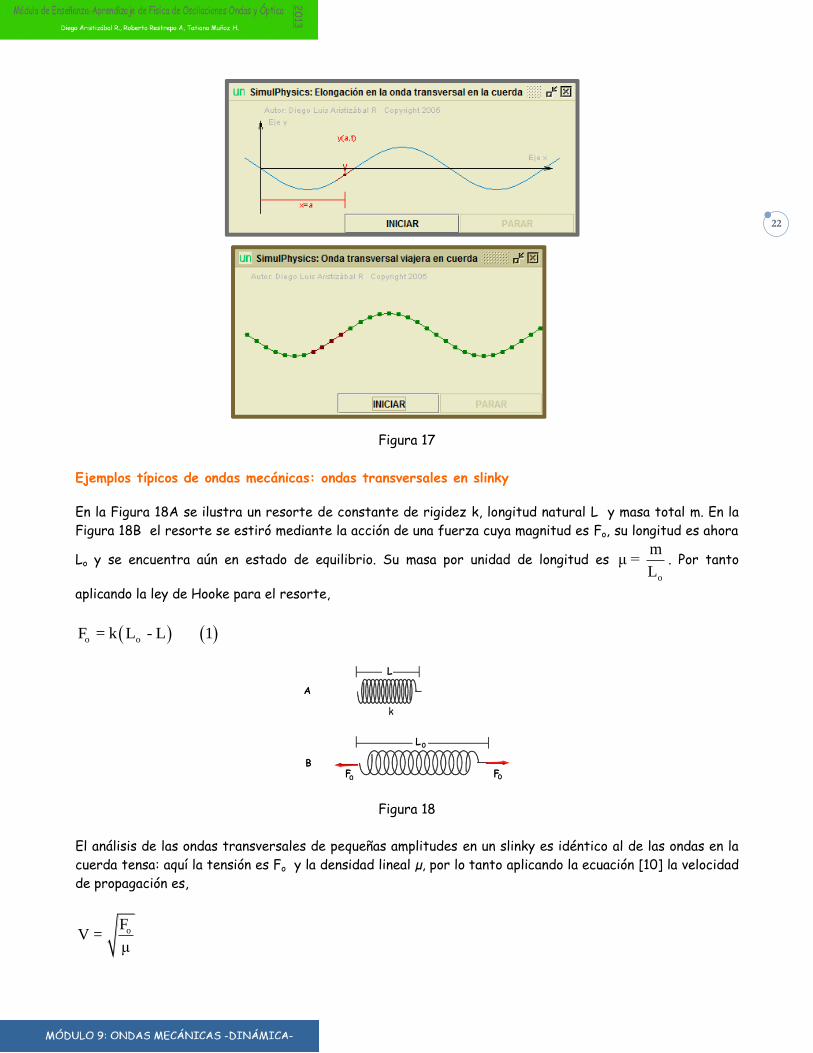
Se despliega la simulación de la Figura 17. En ésta hacer las variaciones permitidas y observar
detenidamente los resultados.
Figura 16
22
Figura 17
Ejemplos típicos de ondas mecánicas: ondas transversales en slinky
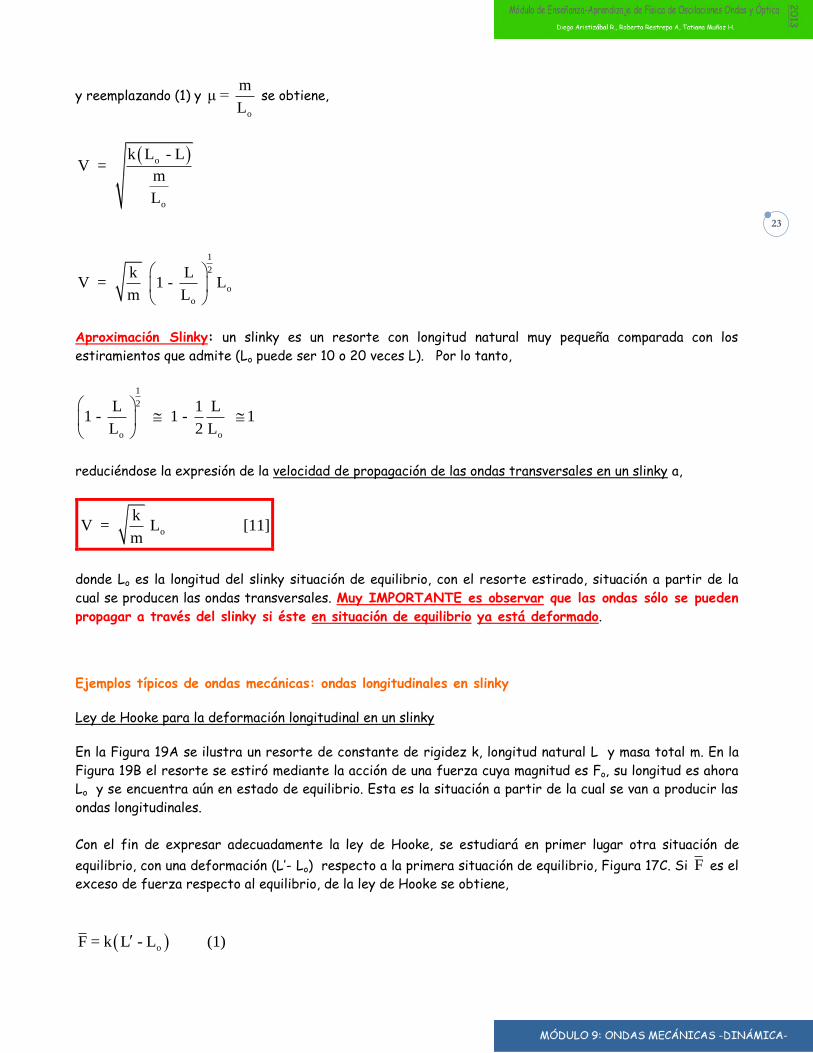
En la Figura 18A se ilustra un resorte de constante de rigidez k, longitud natural L y masa total m. En la
Figura 18B el resorte se estiró mediante la acción de una fuerza cuya magnitud es Fo, su longitud es ahora
Lo y se encuentra aún en estado de equilibrio. Su masa por unidad de longitud es o
mμ =
L. Por tanto
aplicando la ley de Hooke para el resorte,
o oF = k L - L 1
Figura 18
El análisis de las ondas transversales de pequeñas amplitudes en un slinky es idéntico al de las ondas en la
cuerda tensa: aquí la tensión es Fo y la densidad lineal µ, por lo tanto aplicando la ecuación [10] la velocidad
de propagación es,
oFV =
μ
23
y reemplazando (1) y o
mμ =
L se obtiene,
o
o
k L - LV =
m
L
1
2
o
o
k LV = 1 - L
m L
Aproximación Slinky: un slinky es un resorte con longitud natural muy pequeña comparada con los
estiramientos que admite (Lo puede ser 10 o 20 veces L). Por lo tanto,
1
2
o o
L 1 L1 - 1 - 1
L 2 L
reduciéndose la expresión de la velocidad de propagación de las ondas transversales en un slinky a,
o
kV = L [11]
m
donde Lo es la longitud del slinky situación de equilibrio, con el resorte estirado, situación a partir de la
cual se producen las ondas transversales. Muy IMPORTANTE es observar que las ondas sólo se pueden
propagar a través del slinky si éste en situación de equilibrio ya está deformado.
Ejemplos típicos de ondas mecánicas: ondas longitudinales en slinky
Ley de Hooke para la deformación longitudinal en un slinky
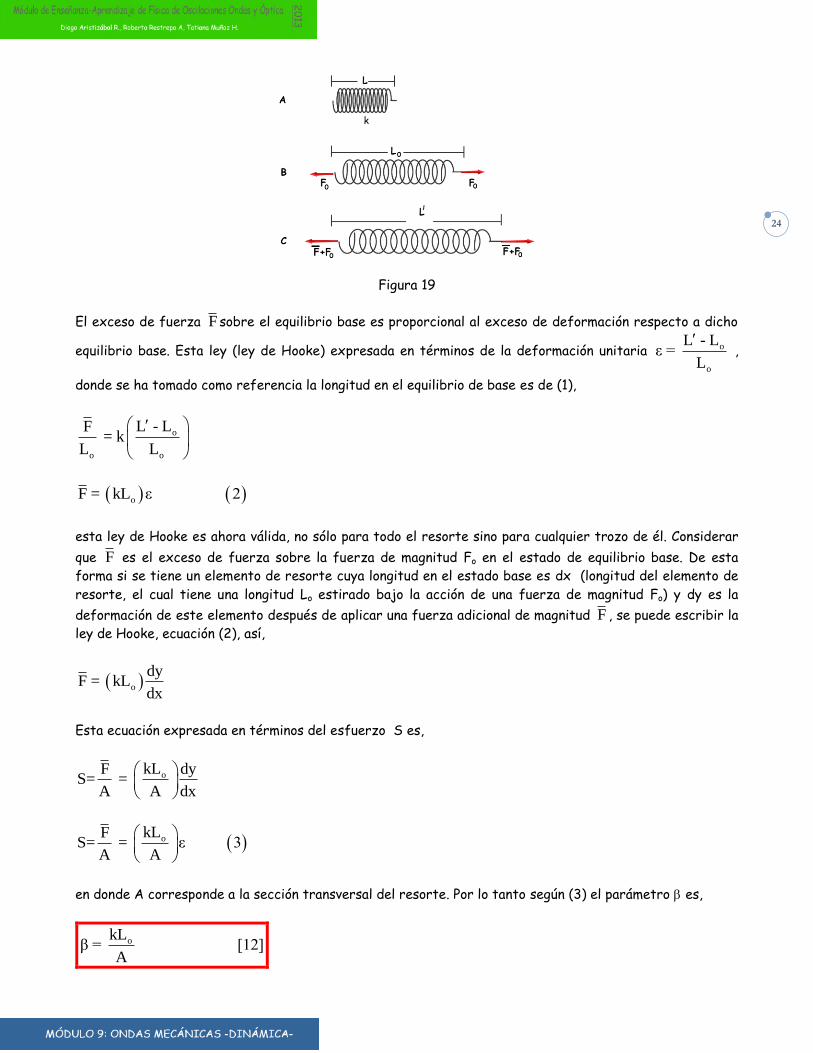
En la Figura 19A se ilustra un resorte de constante de rigidez k, longitud natural L y masa total m. En la
Figura 19B el resorte se estiró mediante la acción de una fuerza cuya magnitud es Fo, su longitud es ahora
Lo y se encuentra aún en estado de equilibrio. Esta es la situación a partir de la cual se van a producir las
ondas longitudinales.
Con el fin de expresar adecuadamente la ley de Hooke, se estudiará en primer lugar otra situación de
equilibrio, con una deformación (L’- Lo) respecto a la primera situación de equilibrio, Figura 17C. Si F es el
exceso de fuerza respecto al equilibrio, de la ley de Hooke se obtiene,
oF = k L - L (1)
24
Figura 19
El exceso de fuerza F sobre el equilibrio base es proporcional al exceso de deformación respecto a dicho
equilibrio base. Esta ley (ley de Hooke) expresada en términos de la deformación unitaria o
o
L - Lε =
L
,
donde se ha tomado como referencia la longitud en el equilibrio de base es de (1),
o
o o
L - LF = k
L L
oF = kL ε 2
esta ley de Hooke es ahora válida, no sólo para todo el resorte sino para cualquier trozo de él. Considerar
que F es el exceso de fuerza sobre la fuerza de magnitud Fo en el estado de equilibrio base. De esta
forma si se tiene un elemento de resorte cuya longitud en el estado base es dx (longitud del elemento de
resorte, el cual tiene una longitud Lo estirado bajo la acción de una fuerza de magnitud Fo) y dy es la
deformación de este elemento después de aplicar una fuerza adicional de magnitud F , se puede escribir la
ley de Hooke, ecuación (2), así,
o
dyF = kL
dx
Esta ecuación expresada en términos del esfuerzo S es,
okLF dyS= =
A A dx
okLFS= = ε 3
A A
en donde A corresponde a la sección transversal del resorte. Por lo tanto según (3) el parámetro es,
okLβ = [12]
A
25
Por lo tanto la velocidad de propagación de las ondas longitudinales en un slinky es con base en las
ecuaciones [7], [9] y [12],
okL
β AV = =
μρ
A
okLV =
μ
y como o
mμ =
L se obtiene,
o
o
kLV =
m
L
o
kV = L [13]
m
Observar que las ondas longitudinales y las ondas transversales en el slinky se propagan con la misma
velocidad, ecuaciones [11] y [13].
Simulación:
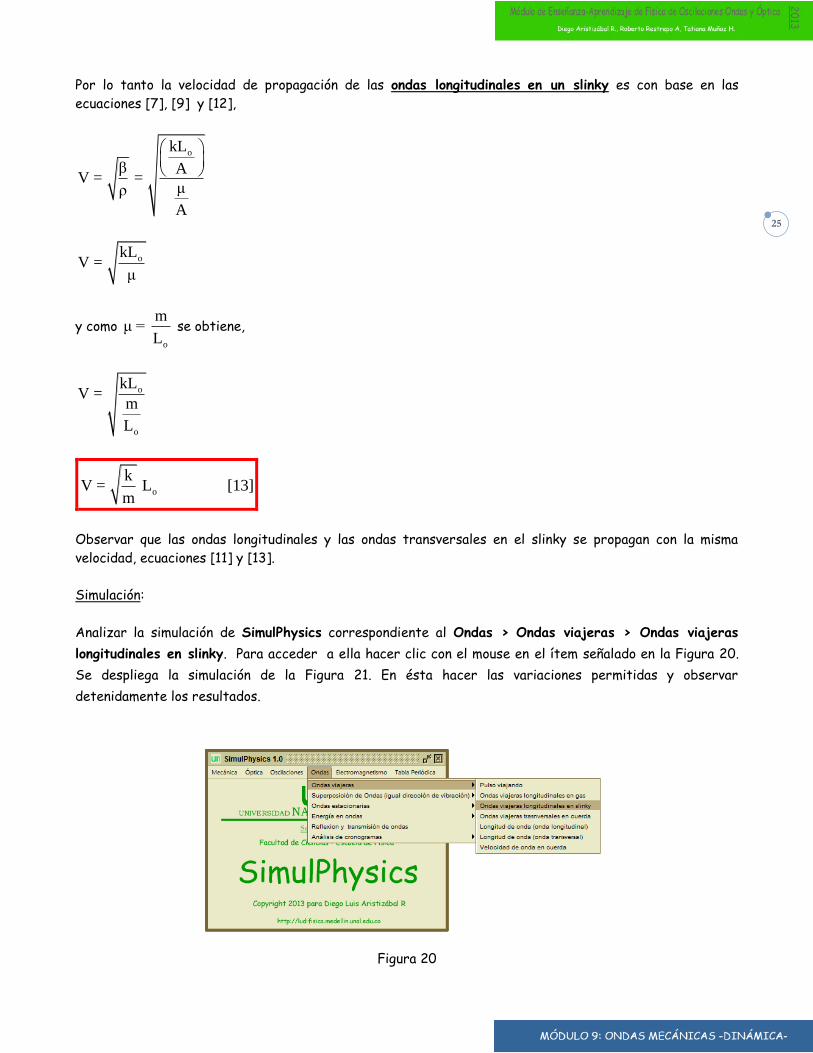
Analizar la simulación de SimulPhysics correspondiente al Ondas > Ondas viajeras > Ondas viajeras
longitudinales en slinky. Para acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 20.
Se despliega la simulación de la Figura 21. En ésta hacer las variaciones permitidas y observar
detenidamente los resultados.
Figura 20
26
Figura 21
Ejemplos típicos de ondas mecánicas: ondas longitudinales en barras sólidas
Ley de Hooke para la deformación longitudinal en barras sólidas
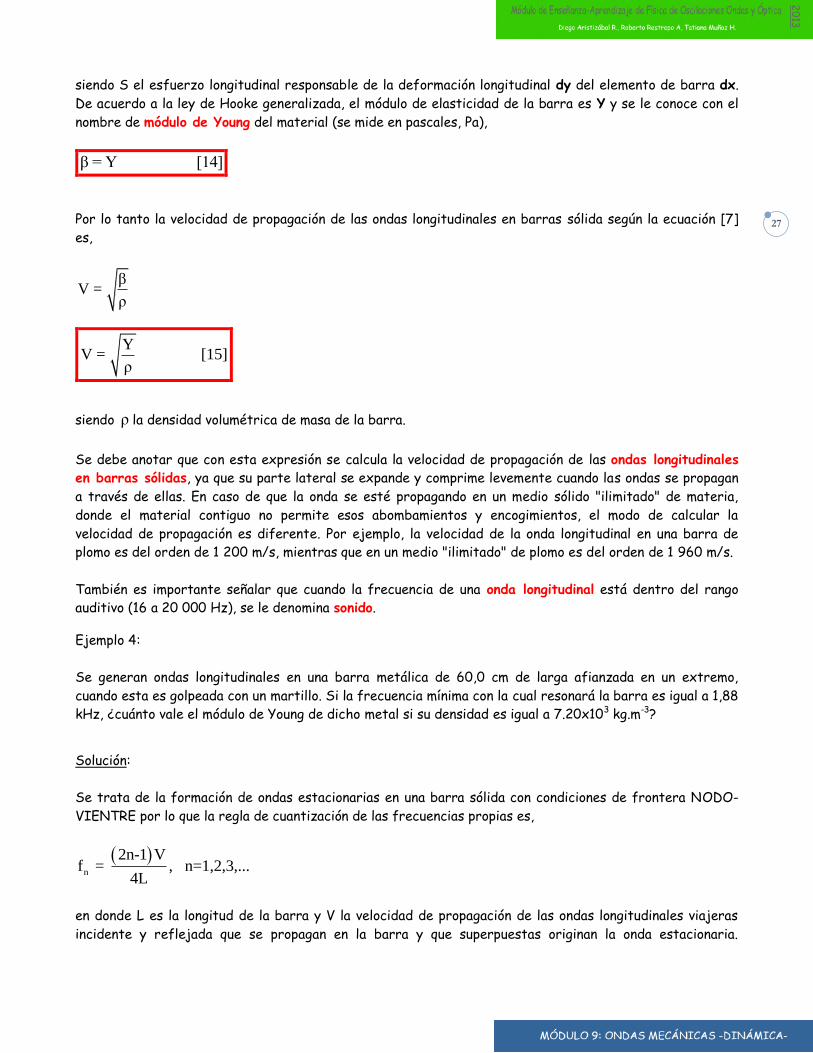
Se ejerce una fuerza longitudinal de magnitud F sobre una barra que está empotrada en una pared, Figura
22. En la parte de arriba de la figura, la barra no ha sido deformada. En la parte de abajo se ilustra la
deformación longitudinal de un elemento dx de la barra, el cual está sometido a dos fuerzas ejercidas por
las porciones de la barra que se encuentran a su lado y que en situación de equilibrio serán iguales en
magnitud a F. La fuerza deformadora se propaga, sin disminuir su magnitud, a todos los puntos de la barra.
En este elemento dx la cara cuya posición de equilibrio está ubicada en la posición x, se elonga
longitudinalmente en una cantidad igual a y, y la cara cuya posición de equilibrio está ubicada en x + dx se
elonga en una cantidad igual a y + dy. La deformación en dirección longitudinal (deformación longitudinal)
de la porción de barra dx es igual a dy. La ley de Hooke para pequeñas deformaciones longitudinales en
barras sólidas (por ejemplo, en una barra de acero usada en construcción, podría ser del orden de 1 mm en
1 m) establece que estas son proporcionales a los esfuerzos causantes de las mismas, ecuación [3],
S = Yε
dyS = Y
dx
Figura 22
27
siendo S el esfuerzo longitudinal responsable de la deformación longitudinal dy del elemento de barra dx.
De acuerdo a la ley de Hooke generalizada, el módulo de elasticidad de la barra es Y y se le conoce con el
nombre de módulo de Young del material (se mide en pascales, Pa),
β = Y [14]
Por lo tanto la velocidad de propagación de las ondas longitudinales en barras sólida según la ecuación [7]
es,
βV =
ρ
YV = [15]
ρ
siendo ρ la densidad volumétrica de masa de la barra.
Se debe anotar que con esta expresión se calcula la velocidad de propagación de las ondas longitudinales
en barras sólidas, ya que su parte lateral se expande y comprime levemente cuando las ondas se propagan
a través de ellas. En caso de que la onda se esté propagando en un medio sólido "ilimitado" de materia,
donde el material contiguo no permite esos abombamientos y encogimientos, el modo de calcular la
velocidad de propagación es diferente. Por ejemplo, la velocidad de la onda longitudinal en una barra de
plomo es del orden de 1 200 m/s, mientras que en un medio "ilimitado" de plomo es del orden de 1 960 m/s.
También es importante señalar que cuando la frecuencia de una onda longitudinal está dentro del rango
auditivo (16 a 20 000 Hz), se le denomina sonido.
Ejemplo 4:
Se generan ondas longitudinales en una barra metálica de 60,0 cm de larga afianzada en un extremo,
cuando esta es golpeada con un martillo. Si la frecuencia mínima con la cual resonará la barra es igual a 1,88
kHz, ¿cuánto vale el módulo de Young de dicho metal si su densidad es igual a 7.20x103 kg.m-3?
Solución:
Se trata de la formación de ondas estacionarias en una barra sólida con condiciones de frontera NODO-
VIENTRE por lo que la regla de cuantización de las frecuencias propias es,
n
2n-1 Vf = , n=1,2,3,...
4L
en donde L es la longitud de la barra y V la velocidad de propagación de las ondas longitudinales viajeras
incidente y reflejada que se propagan en la barra y que superpuestas originan la onda estacionaria.
28
Claramente se dice que el armónico correspondiente a la frecuencia de 1,88 kHz es el fundamental, por lo
tanto,
V1 880 Hz =
4 0,60 m
mV = 4 512
s
y como,
YV =
ρ
2Y = ρV
2
3
3
kg mY = 7,20×10 4 512
m s
Y = 146,6 GPa
Simulación:
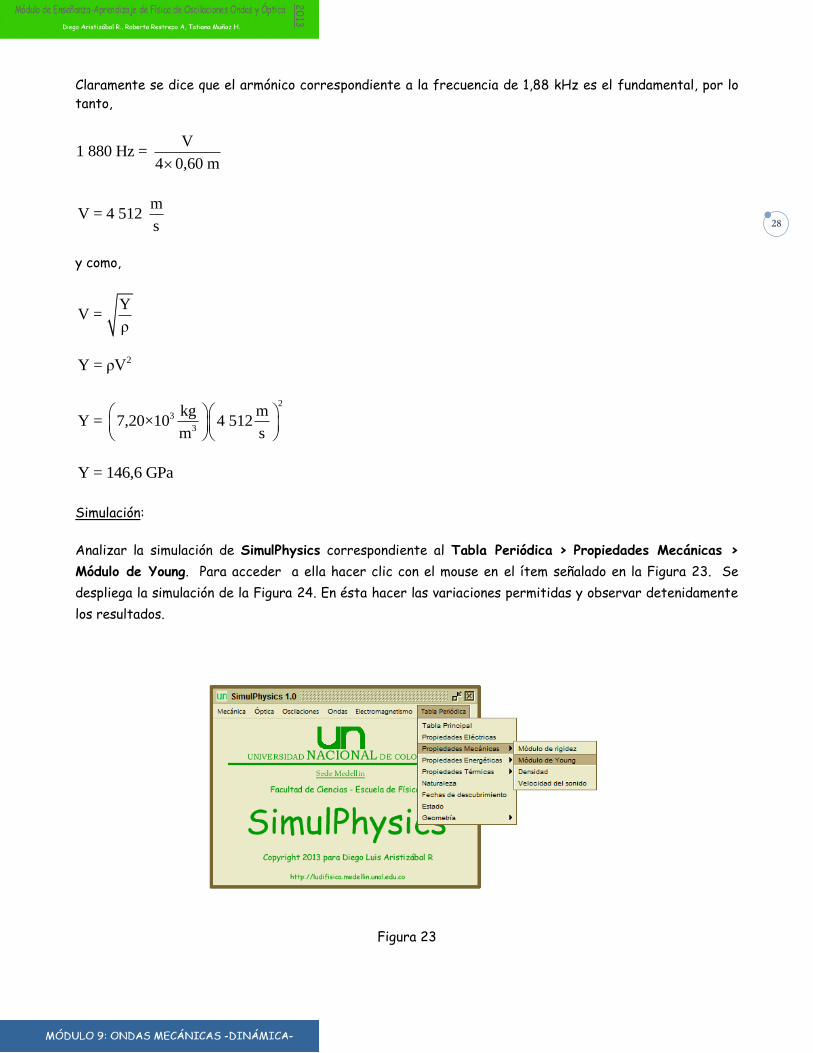
Analizar la simulación de SimulPhysics correspondiente al Tabla Periódica > Propiedades Mecánicas >
Módulo de Young. Para acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 23. Se
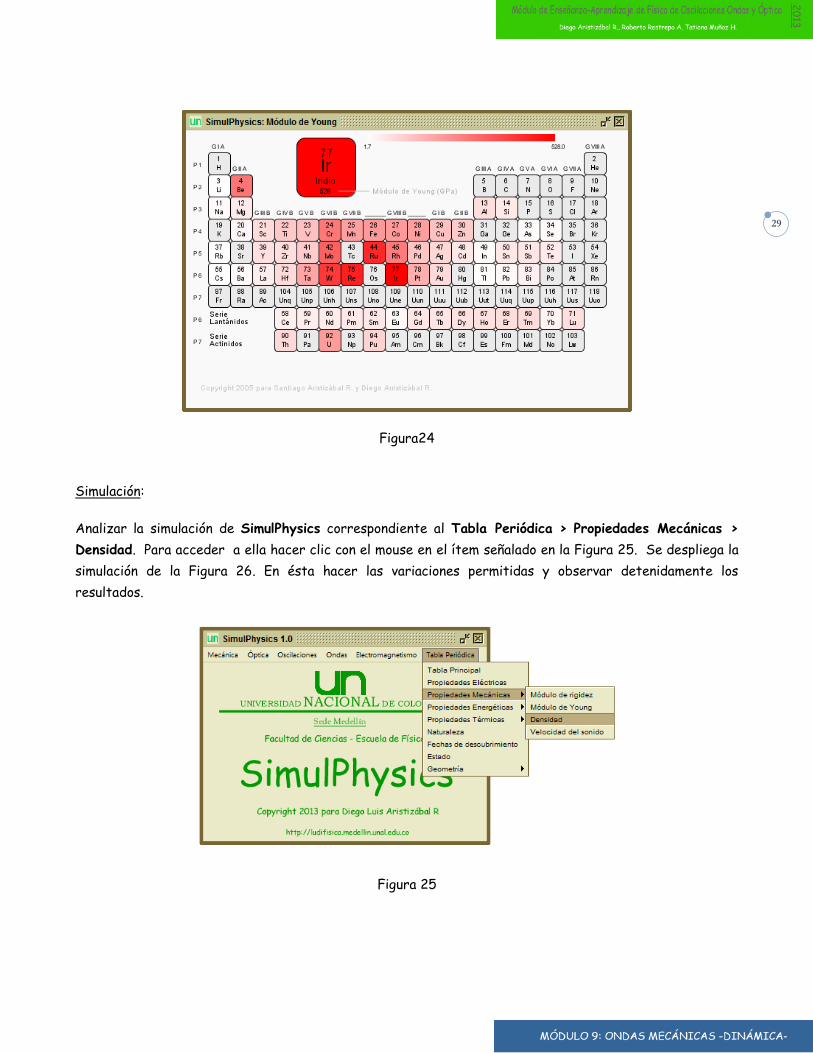
despliega la simulación de la Figura 24. En ésta hacer las variaciones permitidas y observar detenidamente
los resultados.
Figura 23
29
Figura24
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Tabla Periódica > Propiedades Mecánicas >
Densidad. Para acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 25. Se despliega la
simulación de la Figura 26. En ésta hacer las variaciones permitidas y observar detenidamente los
resultados.
Figura 25

30
Figura 26
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Tabla Periódica > Propiedades Mecánicas >
Velocidad del sonido. Para acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 27. Se
despliega la simulación de la Figura 28. En ésta hacer las variaciones permitidas y observar detenidamente
los resultados.
Figura 27
31
Figura 28
Ejemplos típicos de ondas mecánicas: ondas transversales en barras sólidas
Ley de Hooke para la deformación transversal en barras sólidas
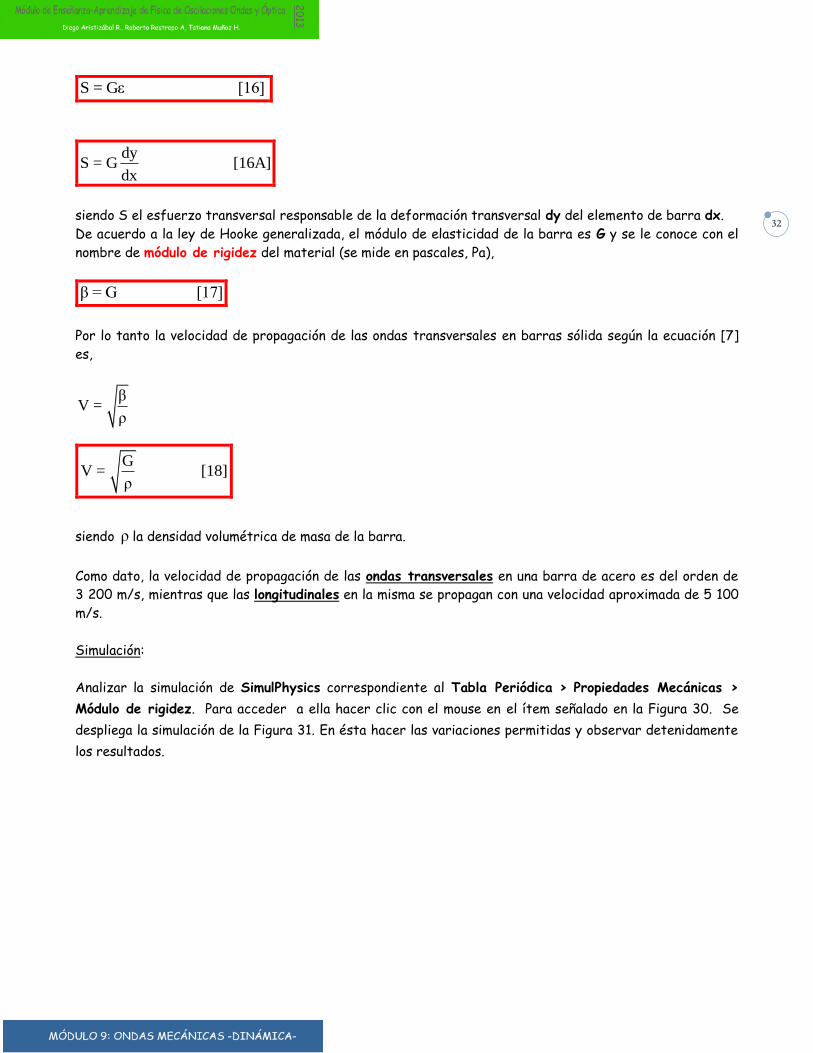
Se ejerce una fuerza transversal (fuerza de cizalladura) de magnitud F sobre una barra que está
empotrada en la pared, Figura 29. En la figura se ilustra la deformación de un elemento dx de la barra, el
cual estará sometido a dos fuerzas ejercidas por las porciones de la barra que se encuentran a su lado.
Figura 29
En este elemento dx la cara cuya posición de equilibrio está ubicada en la posición x, se elonga
transversalmente en una cantidad igual a y, y la cara cuya posición de equilibrio está ubicada en x + dx se
elonga en una cantidad igual a y +dy. La deformación en dirección transversal (deformación transversal) de
la porción de barra dx es igual a dy. La ley de Hooke para pequeñas deformaciones transversales en barras
sólidas establece que estas son proporcionales a los esfuerzos causantes de las mismas,
32
S = Gε [16]
dyS = G [16A]
dx
siendo S el esfuerzo transversal responsable de la deformación transversal dy del elemento de barra dx.
De acuerdo a la ley de Hooke generalizada, el módulo de elasticidad de la barra es G y se le conoce con el
nombre de módulo de rigidez del material (se mide en pascales, Pa),
β = G [17]
Por lo tanto la velocidad de propagación de las ondas transversales en barras sólida según la ecuación [7]
es,
βV =
ρ
GV = [18]
ρ
siendo ρ la densidad volumétrica de masa de la barra.
Como dato, la velocidad de propagación de las ondas transversales en una barra de acero es del orden de
3 200 m/s, mientras que las longitudinales en la misma se propagan con una velocidad aproximada de 5 100
m/s.
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Tabla Periódica > Propiedades Mecánicas >
Módulo de rigidez. Para acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 30. Se
despliega la simulación de la Figura 31. En ésta hacer las variaciones permitidas y observar detenidamente
los resultados.
33
Figura 30
Figura 31
Ejemplos típicos de ondas mecánicas: ondas longitudinales en fluidos
Ley de Hooke para la deformación longitudinal en fluidos (Esfuerzo de Volumen: Presión)
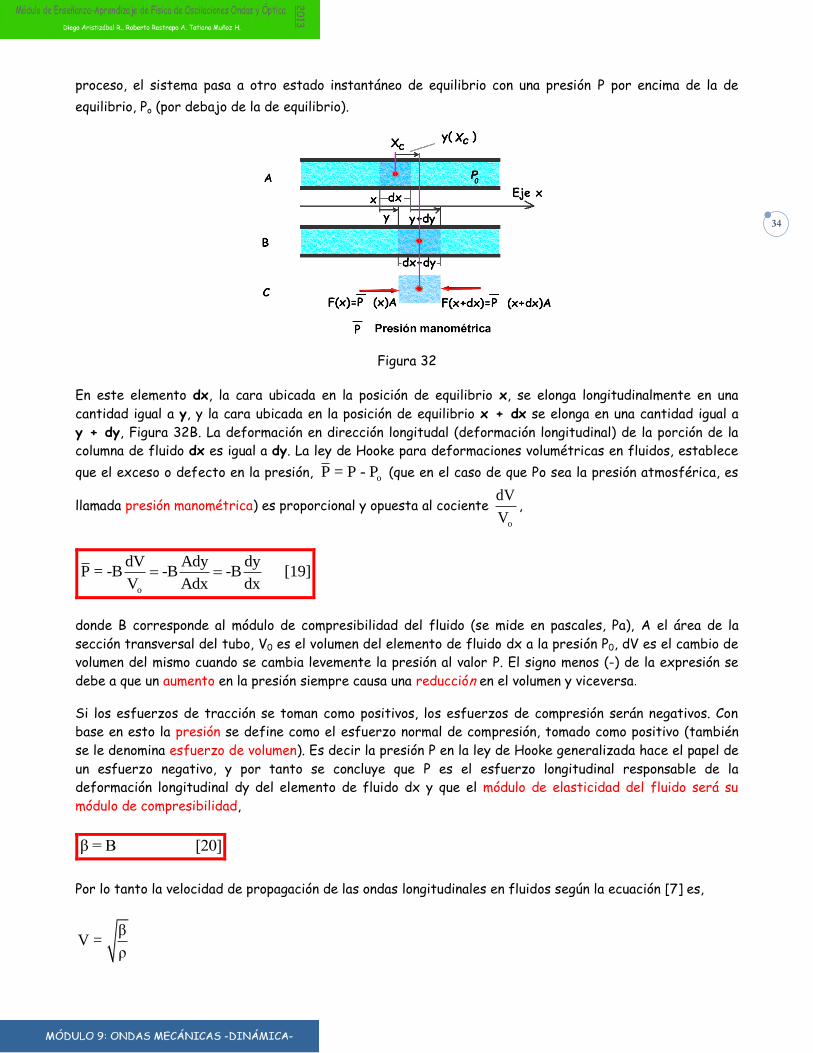
Se tiene un fluido (gas o líquido) dentro de un tubo, Figura 32A. En equilibrio todas las porciones del fluido
estarán a la presión atmosférica Po (o a la presión externa de equilibrio). Si se escoge un elemento de la
columna de fluido de longitud dx, mientras el sistema esté en equilibrio, tanto la cara izquierda como la
derecha de éste, Figura 32C, estarán sometidas a iguales fuerzas debido a los efectos de las presiones
sobre ellas que ejerce el resto de fluido a izquierda y derecha respectivamente. Si se comprime (o se
expande) el fluido, por ejemplo desplazando leve y lentamente un pistón -proceso cuasiestático- de
izquierda (derecha) a derecha (izquierda), aparecerá una compresión (expansión) del elemento dx. La
compresión implicará una pequeña elevación de la presión por encima de la presión de equilibrio y la
expansión una pequeña disminución por debajo de la misma. Sin embargo, debido a la forma como se llevó el
34
proceso, el sistema pasa a otro estado instantáneo de equilibrio con una presión P por encima de la de
equilibrio, Po (por debajo de la de equilibrio).
Figura 32
En este elemento dx, la cara ubicada en la posición de equilibrio x, se elonga longitudinalmente en una
cantidad igual a y, y la cara ubicada en la posición de equilibrio x + dx se elonga en una cantidad igual a
y + dy, Figura 32B. La deformación en dirección longitudal (deformación longitudinal) de la porción de la
columna de fluido dx es igual a dy. La ley de Hooke para deformaciones volumétricas en fluidos, establece
que el exceso o defecto en la presión, oP = P - P (que en el caso de que Po sea la presión atmosférica, es
llamada presión manométrica) es proporcional y opuesta al cociente o
dV
V,
o
dV Ady dyP = -B -B -B [19]
V Adx dx
donde B corresponde al módulo de compresibilidad del fluido (se mide en pascales, Pa), A el área de la
sección transversal del tubo, V0 es el volumen del elemento de fluido dx a la presión P0, dV es el cambio de
volumen del mismo cuando se cambia levemente la presión al valor P. El signo menos (-) de la expresión se
debe a que un aumento en la presión siempre causa una reducción en el volumen y viceversa.
Si los esfuerzos de tracción se toman como positivos, los esfuerzos de compresión serán negativos. Con
base en esto la presión se define como el esfuerzo normal de compresión, tomado como positivo (también
se le denomina esfuerzo de volumen). Es decir la presión P en la ley de Hooke generalizada hace el papel de
un esfuerzo negativo, y por tanto se concluye que P es el esfuerzo longitudinal responsable de la
deformación longitudinal dy del elemento de fluido dx y que el módulo de elasticidad del fluido será su
módulo de compresibilidad,
β = B [20]
Por lo tanto la velocidad de propagación de las ondas longitudinales en fluidos según la ecuación [7] es,
βV =
ρ

35
o
BV = [21]
ρ
siendo oρ la densidad volumétrica del fluido en estado de equilibrio.
Este tipo de ondas son de gran aplicación ya que son las que están asociadas con las ondas sonoras. Si están
en el rango de frecuencias audibles (16 a 20 000 Hz) se les denomina sonido.
Aunque la ley de Hooke explicada en esta sección se aplicó a fluidos (gases o líquidos), es también aplicable
a los cuerpos en el estado sólido. La diferencia radica en que para pequeños cambios de presión, B se
considera constante para sólidos y líquidos, en cambio en los gases dependerá de la presión inicial P0. Por lo
tanto a través de los sólidos también se propagan estas ondas longitudinales y la velocidad de propagación
también cumplen la expresión [21]. Surge entonces la pregunta, ¿cómo saber cuál expresión utilizar para
calcular la velocidad de propagación de las ondas longitudinales en sólidos, Y
V = ρ
o B
V = ρ
? La
respuesta es la siguiente:
Si se trata de una barra su parte lateral se expande y comprime levemente cuando las ondas
longitudinales se propagan a través de ella y en este caso se debe aplicar la expresión,
YV =
ρ
Si se trata de un sólido “extenso” (materiales no en forma de barras) no se presentara la expansión y
compresión lateral a la que se refiere en el caso de la barra ya que el movimiento lateral de cualquier
elemento es impedido por el material circundante. En este caso se emplea la expresión,
BV =
ρ
Como dato pensar en que la velocidad de la onda longitudinal en una barra de plomo es del orden de 1 200
m/s mientras que ésta en un medio "ilimitado" (material extenso y no como barra) de plomo es del orden de
1 960 m/s. Otro dato, por ejemplo, para el aluminio, la velocidad de la onda longitudinal en un medio
“extenso” es 6 420 m/s, la velocidad de la onda transversal 3 040 m/s y la velocidad de la onda
longitudinal en una barra delgada 5 000 m/s. Siempre la velocidad de la onda transversal es menor que la
de la onda longitudinal y la velocidad de las ondas longitudinales a lo largo de una barra sólida delgada es
en general menor que la velocidad en el medio sólido extenso.
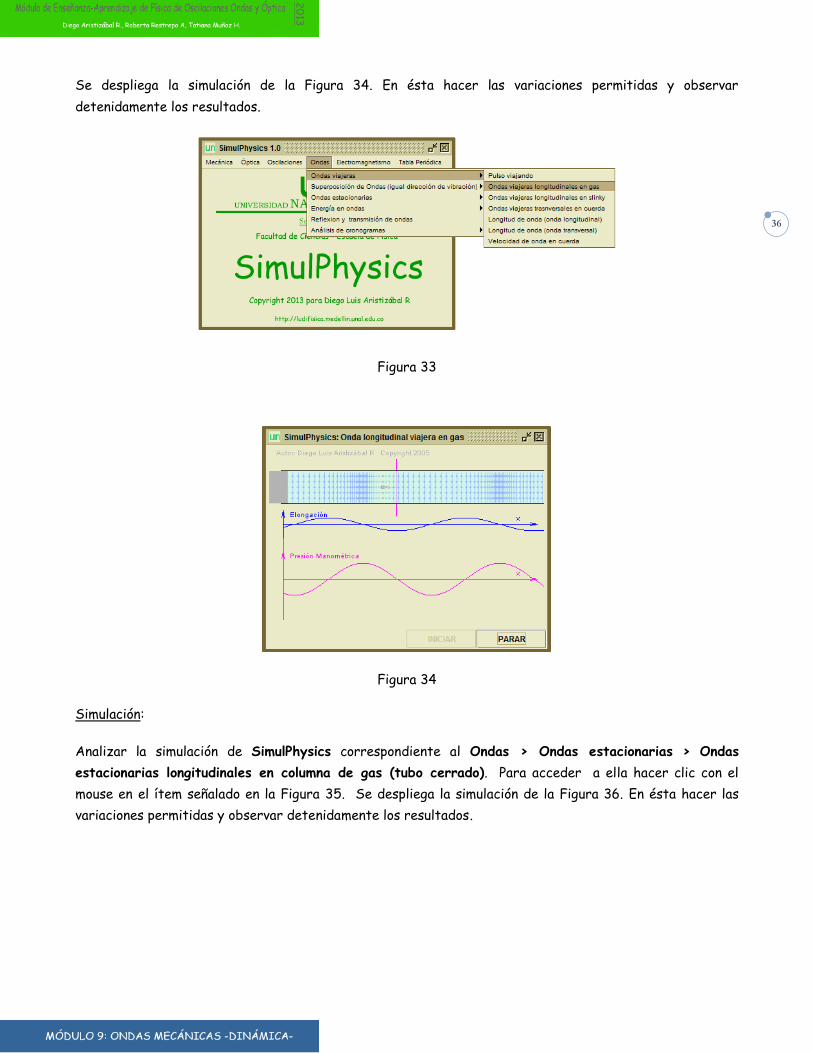
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Ondas > Ondas viajeras > Ondas viajeras
longitudinales en un gas. Para acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 33.
36
Se despliega la simulación de la Figura 34. En ésta hacer las variaciones permitidas y observar
detenidamente los resultados.
Figura 33
Figura 34
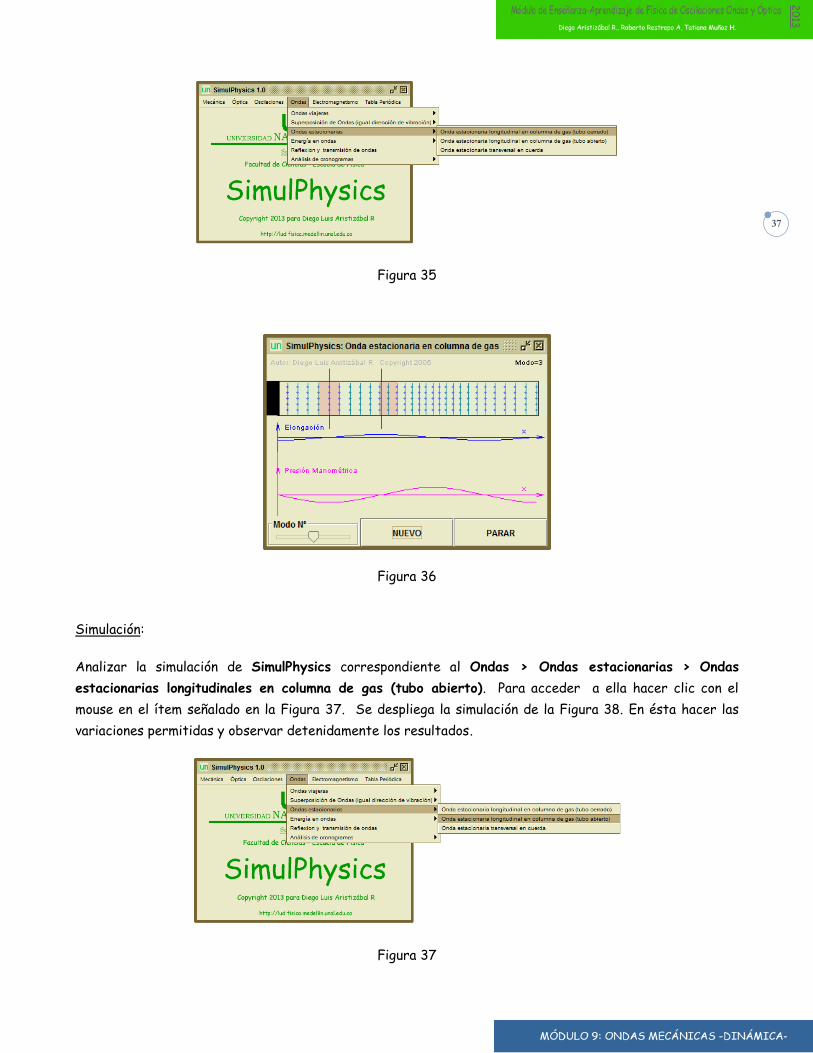
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Ondas > Ondas estacionarias > Ondas
estacionarias longitudinales en columna de gas (tubo cerrado). Para acceder a ella hacer clic con el
mouse en el ítem señalado en la Figura 35. Se despliega la simulación de la Figura 36. En ésta hacer las
variaciones permitidas y observar detenidamente los resultados.
37
Figura 35
Figura 36
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Ondas > Ondas estacionarias > Ondas
estacionarias longitudinales en columna de gas (tubo abierto). Para acceder a ella hacer clic con el
mouse en el ítem señalado en la Figura 37. Se despliega la simulación de la Figura 38. En ésta hacer las
variaciones permitidas y observar detenidamente los resultados.
Figura 37
38
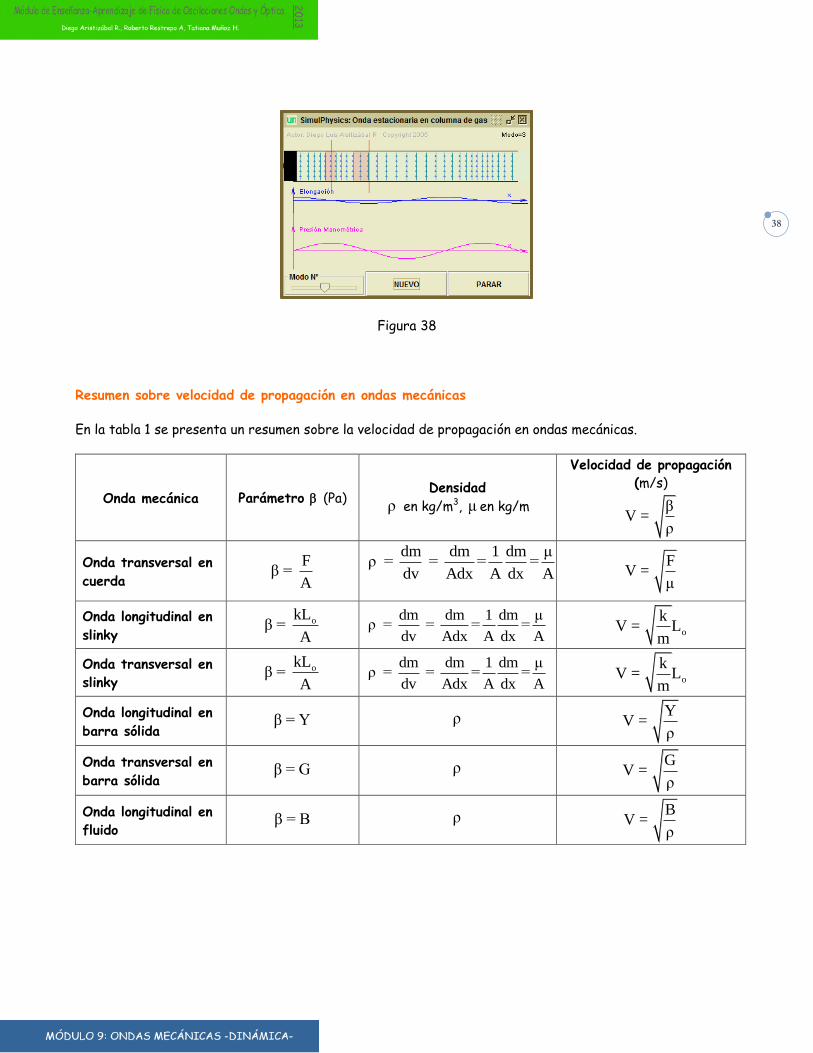
Figura 38
Resumen sobre velocidad de propagación en ondas mecánicas
En la tabla 1 se presenta un resumen sobre la velocidad de propagación en ondas mecánicas.
Onda mecánica Parámetro (Pa) Densidad
ρ en kg/m3, μ en kg/m
Velocidad de propagación
(m/s)
βV =
ρ
Onda transversal en
cuerda
Fβ =
A
dm dm 1 dm μρ = = = =
dv Adx A dx A
FV =
μ
Onda longitudinal en
slinky okL
β = A
dm dm 1 dm μ
ρ = = = =dv Adx A dx A
o
kV = L
m
Onda transversal en
slinky okL
β = A
dm dm 1 dm μ
ρ = = = =dv Adx A dx A
o
kV = L
m
Onda longitudinal en
barra sólida β = Y ρ
YV =
ρ
Onda transversal en
barra sólida β = G ρ
GV =
ρ
Onda longitudinal en
fluido β = B ρ
BV =
ρ
39
Temas de interés: ondas sísmicas
(Tomado de: http://www.lpi.tel.uva.es/~nacho/docencia/ing_ond_1/trabajos_06_07/io3/public_html/Ondas/Ondas.html)
En un terremoto se producen ondas sísmicas que son las vibraciones en las que se dispersa la energía a
partir del foco o hipocentro de un terremoto.
Estas ondas sísmicas pueden se internas o superficiales. Las ondas internas son las que se propagan por el
interior de la Tierra y su estudio es muy importante ya que aportan datos sobre la estructura y
composición de ésta. Las ondas superficiales sólo viajan por la superficie de la Tierra y son las
responsables de las catástrofes.
Las ondas internas se clasifican en: ondas primarias (P) y ondas secundarias (S). Las ondas superficiales
se clasifican en: ondas de Rayleigh y ondas de Love.
Ondas internas
Ondas Primarias (P)
Son ondas longitudinales. Estas ondas generalmente viajan a una velocidad 1,73 veces de las ondas S y
pueden viajar a través de cualquier tipo de material (líquidos, gases y sólidos). Velocidades típicas son
330m/s en el aire, 1 450m/s en el agua y cerca de 5 000m/s en el granito.
Ondas Secundarias (S)
Son ondas transversales o de corte. Pueden viajar únicamente a través de sólidos debido a que los fluidos
no pueden soportar esfuerzos de corte: la ausencia de ondas S detectadas a grandes distancias de los
terremotos fue el primer indicio de que la tierra tiene un núcleo líquido. Su velocidad es alrededor de 58%
la de una onda P para cualquier material sólido. Usualmente la onda S tiene mayor amplitud que la P y se
siente más fuerte que ésta: suelen ser más perjudiciales que las ondas P.
Ondas superficiales
Las ondas superficiales pueden causar movimiento perpendicular o paralelo a la superficie. Las ondas que
mueven la superficie hacia arriba y hacia abajo se llaman ondas de Rayleigh y se describen a veces como
“rodillo de tierra”. Las ondas cuya oscilación es paralela a la superficie se denominan ondas de Love.
Se desplazan a menor velocidad que las ondas internas. Debido a su baja frecuencia provocan resonancia
en edificios con mayor facilidad que las ondas de cuerpo y son por ende las ondas sísmicas más
destructivas.
Ondas de Rayleigh
Cuando un sólido posee una superficie libre, como la superficie de la tierra, pueden generarse ondas que
viajan a lo largo de la superficie. Estas ondas tienen su máxima amplitud en la superficie libre, la cual
decrece exponencialmente con la profundidad, y son conocidas como ondas de Rayleigh en honor al
científico que predijo su existencia. Se propagan aproximadamente a un 90% de la velocidad de las ondas
40
S.
Ondas de Love
Llamadas así en honor del científico que las estudió. Estas se generan sólo cuando un medio elástico se
encuentra estratificado, situación que se cumple en nuestro planeta pues se encuentra formado por capas
de diferentes características físicas y químicas. Las ondas de Love son transversales como las ondas S y
como para las ondas de Rayleigh, su amplitud decrece rápidamente con la profundidad. Se propagan por lo
general un poco más rápido que las ondas de Rayleigh.
La secuencia típica de un terremoto es: primero el arribo de un ruido sordo causado por las ondas ("P"),
luego las ondas ("S") y finalmente el "retumbar" de la tierra causado por las ondas superficiales
Temas de interés: Tsunami
(Tomado textualmente de: http://blogs.eldiariomontanes.es/scientia-mater/2011/03/14/un-poco-fisica-tsunamis/)
Los tsunamis son ondas en el agua, con longitudes de onda de muchos kilómetros (desde las decenas hasta
las centenas), que se producen, principalmente, como consecuencia de terremotos submarinos. Cuando se
produce un terremoto en el mar, con un ligero hundimiento de la plataforma terrestre, se produce una
perturbación en toda la columna de agua por encima del fondo afectado por el terremoto.
La velocidad de éstas ondas, que como son ondas esencialmente volumétricas no superficiales como las
generadas por los vientos, son afectadas por la fuerza de gravedad (el peso de las columnas de agua) se
puede estimar mediante la siguiente ecuación,
V = gh
siendo g la aceleración de la gravedad (g=9,81 m.s-2) y h la profundidad del mar.
El efecto devastador de la onda al llegar a la orilla no se debe a la conservación de la masa de agua, pues
las moléculas de agua apenas se mueven de sus posiciones al oscilar, sino a la conservación de la energía,
que termina por transformar una masa de agua muy grande que se desplaza verticalmente muy poco (unos
centímetros), cuya onda de perturbación tiene una longitud de onda muy grande (decenas de km) y que
avanza horizontalmente muy rápido (a la velocidad de un avión) en una masa de agua, relativamente
pequeña, que avanza horizontalmente de forma lenta (al paso de una persona) pero con una amplitud
vertical mucho mayor (algunos metros): para una profundidad de h=4 000 m, la ecuación anterior indica
que la ola producida por el terremoto se mueve a unos 200 m. s-1, es decir, unos 700 km.h-1 que es del
orden de la velocidad de un avión; cuando esta onda se aproxime a la costa, h =10 m, la velocidad baja a 10
m.s-1, unos 36 km.h-1.
Para una ola con longitud de onda λ = 100 km , en un mar de profundidad h = 4 000 m (V=700 km.h-1), el
tiempo necesario para recorrer una longitud de onda es de unos 9 minutos. Cuando esta onda se acerca a la
costa, su longitud de onda es de unos 5, 50 km (V= 36 km.h-1), y por lo tanto el tiempo entre crestas es
también de unos 9 minutos. Dependiendo de esto, si el tiempo característico entre eventos en la costa es
de una hora, se puede observar el fenómeno de que primero se retira el agua de la playa, presencia de los
valles de la onda (fenómeno que suele atraer a los curiosos), para luego dar lugar a la llegada de la ola
41
gigante (cresta gigante de alturas del orden de los 20 m).
Taller
En este taller recapitula los temas de los módulos 7, 8 y 9
1. Una onda transversal se propaga a través de una cuerda. La ecuación que la describe escrita en el
SI es,
y = 0.05 sen 3πx - 4πt
Calcular la tensión (en N y en kgf) a la que está sometida la cuerda sabiendo que su densidad lineal es igual
a 3,20 g/m.
2. Una cuerda con extremos fijos oscila en el quinto armónico el cual está descrito por la siguiente
ecuación escrita en el SI,
y = 0,10 sen 3πx cos 4πt
Calcular: (a) la tensión (en N y en kgf) a la que está sometida la cuerda sabiendo que su densidad lineal es
igual a 3,20 g/m, (b) la frecuencia del agente externo que la excita, (c) la longitud de la cuerda.
3. Una onda elástica transversal se propaga a través de una cuerda. Si su elongación tiene como
componentes z = Asen kx - ωt y y = Acos kx - ωt : (a) Mostrar que está onda mecánica está
circularmente polarizada. (b) Determinar el sentido de rotación del vector resultante ˆ ˆr = y j + z k . Hacer
una representación gráfica de la propagación de esta onda.
4. Una barra de 60 cm de longitud, sujetada por su parte media está vibrando longitudinalmente en su
armónico fundamental al ser excitada por una fuerza externa de frecuencia 3,00 kHz, ¿Cuál es la rapidez
de las ondas longitudinales en la barra? Rp. 3,60 km/s
Más ejercicios: Pendientes